ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана со следующими одновременно поданными заявками на патенты США, которые включены в настоящую заявку путем отсылки:
(1) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH USER FEEDBACK SYSTEM; изобретатели: Frederick E. Shelton, IV, John Ouwerkerk and Jerome R. Morgan (K&LNG 050519/END5687USNP);
(2) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH LOADING FORCE FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze (K&LNG 050516/END5692USNP);
(3) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze (K&LNG 050515/END5693USNP);
(4) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ADAPTIVE USER FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, and Jerome R. Morgan (K&LNG 050513/END5694USNP);
(5) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ARTICULATABLE END EFFECTOR; изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum (K&LNG 050692/END5769USNP);
(6) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MECHANICAL CLOSURE SYSTEM; изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum (K&LNG 050693/END5770USNP);
(7) SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM; изобретатели: Frederick E. Shelton, IV and Kevin R. Doll (K&LNG 050694/END5771USNP);
(8) GEARING SELECTOR FOR A POWERED SURGICAL CUTTING AND FASTENING STAPLING INSTRUMENT; изобретатели: Frederick E. Shelton, IV, Jeffrey S. Swayze, Eugene L. Timperman (K&LNG 050697/END5772USNP);
(9) SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, and Eugene L. Timperman (K&LNG 050698/END5773USNP);
(10) SURGICAL INSTRUMENT HAVING A REMOVABLE BATTERY; изобретатели: Frederick E. Shelton IV, Kevin R. Doll, Jeffrey S. Swayze and Eugene L. Timperman (K&LNG 050699/END5774USNP);
(11) ELECTRONIC LOCKOUTS AND SURGICAL INSTRUMENT INCLUDING SAME; изобретатели: Jeffrey S. Swayze, Frederick E. Shelton, IV, Kevin R. Doll (K&LNG 050700/END5775USNP);
(12) ENDOSCOPIC SURGICAL INSTRUMENT WITH A HANDLE THAT CAN ARTICULATE WITH RESPECT TO THE SHAFT; изобретатели: Frederick E. Shelton, IV, Jeffrey S. Swayze, Mark S. Ortiz, and Leslie M. Fugikawa (K&LNG 050701/END5776USNP);
(13) ELECTRO-MECHANICAL SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING A ROTARY FIRING AND CLOSURE SYSTEM WITH PARALLEL CLOSURE AND ANVIL ALIGNMENT COMPONENTS; изобретатели: Frederick E. Shelton, IV, Stephen J. Balek and Eugene L. Timperman (K&LNG 050702/END5777USNP); и
(14) DISPOSABLE STAPLE CARTRIDGE HAVING AN ANVIL WITH TISSUE LOCATOR FOR USE WITH A SURGICAL CUTTING AND FASTENING INSTRUMENT AND MODULAR END EFFECTOR SYSTEM THEREFOR; изобретатели: Frederick E. Shelton, IV, Michael S. Cropper, Joshua M. Broehl, Ryan S. Crisp, Jamison J. Float, Eugene L. Timperman (K&LNG 050703/END5778USNP).
УРОВЕНЬ ТЕХНИКИ
Настоящая заявка раскрывает изобретение, которое относится в общем и в различных вариантах осуществления к системам визуальной и звуковой обратной связи для хирургических аппаратов с приводом от двигателя.
Эндоскопическим хирургическим аппаратам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических аппаратов, которые пригодны для точного размещения дистального концевого эффектора в искомом операционном поле через канюлю или троакар. Такие дистальные концевые эффекторы (например, эндоскопический режущий инструмент (типа endocutter), захват, режущее приспособление, сшивающие скобками аппараты, приспособление для наложения зажимов, устройство доступа, устройство для доставки лекарства генной терапии к месту действия и энергетическое устройство, использующее ультразвук, высокую частоту (RF), лазер и т.д.) взаимодействуют с тканью множеством способов для получения диагностического или терапевтического результата.
Известные хирургические аппараты для наложения скобок содержат концевой эффектор, который одновременного выполняет продольное рассечение в ткани и накладывает ряды скобок на противоположные стороны рассечения. Концевой эффектор содержит пару согласованно действующих зажимных элементов, которые, если аппарат предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два латерально разнесенных ряда скобок. Другой зажимной элемент образует упор, содержащий скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Аппарат содержит множество возвратно-поступательно перемещающихся клиньев, которые при приведении в движение в дистальном направлении проходят сквозь отверстия в кассете для скобок и входят в контакт с поводками, служащими опорой для скобок, для выполнения выталкивания скобок к упору.
Пример хирургического аппарата для наложения скобок, подходящего для эндоскопического применения, описан в патенте США № 5465895, который дает описание эндоскопического режущего инструмента с разделением смыкающего и сшивающего/отрезающего действий. Врач, использующий данное устройство, может смыкать зажимные элементы на ткани для позиционирования ткани перед прошивкой/отрезанием. После того, как врач определил, что зажимные элементы правильно захватывают ткань, врач может привести в действие хирургический аппарат для наложения скобок либо одним, либо несколькими прошивными движениями и тем самым отрезать ткань и сшить ее скобками. Одновременное отрезание и прошивание скобками исключает осложнения, которые могут возникать при последовательном выполнении данных действий разными хирургическими инструментами, которые, соответственно, только отрезают или сшивают скобками.
Одно особое преимущество возможности смыкания на ткани перед прошивкой/отрезанием состоит в том, что врач может проверить через эндоскоп, что требуемое размещение для отрезания обеспечено, в том числе между противоположными зажимами захвачено достаточное количество ткани. В противном случае противоположные зажимы могут быть сведены слишком близко, в частности с защемлением их дистальных концов, и следовательно, с неэффективным формированием сжатых скобок в отрезанной ткани. В другом крайнем случае излишнее количество зажатой ткани может вызвать заедание и неполную прошивку/отрезание.
Эндоскопические сшивающие скобками/режущие приспособления становятся сложнее и функциональнее с каждым поколением. Одной из главных причин этого является поиск пути снижения усилия прошивки/отрезания (FTP) до уровня, который способна обеспечить рука всех или подавляющего большинства хирургов. Одним известным решением по снижению FTF является использование двигателей на CO2 или электродвигателей. Данные устройства оказались не намного лучше, чем традиционные устройства с ручным приводом, но по другой причине. Хирурги обычно предпочитают ощущать распределение усилия, соразмерное усилию, испытываемому концевым эффектором при формировании скобки, для уверенности в том, что цикл отрезания/сшивания скобками завершен при верхнем пределе, посильном для большинства хирургов (обычно около 15-30 фунтов). Хирурги обычно желают также сохранять управление установкой скобок и возможность останова в любой момент, если усилия, ощущаемые в рукоятке устройства, оказываются слишком большими, или по другой клинической причине. Упомянутые полезные результаты обратной связи с пользователем невозможно осуществить подходящим образом в существующих эндоскопических режущих инструментах с приводом от двигателя. В результате, эндоскопические режущие инструменты с приводом от двигателя, в которых операция отрезания/сшивания скобками включается простым нажатием кнопки, не получили всеобщего признания врачами.
В современных хирургических аппаратах состояние аппарата обычно не доводится до сведения пользователя хирургического аппарата во время процедуры. Например, в существующих механических эндоскопических режущих инструментах информация о присутствии кассеты для скобок, положении ножа, времени, прошедшем с момента зажима, величине отрезного/прошивного усилия и т.п. обычно не доводится до пользователя. В отсутствие визуальной и/или звуковой обратной связи каждый пользователь может полагаться на собственное «ощущение» для определения состояния хирургического аппарата, что порождает неэффективность, непоследовательность и риск повреждения хирургического аппарата.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом, настоящая заявка содержит описание модуля состояния для применения с хирургическим аппаратом, содержащим множество датчиков. В соответствии с различными вариантами осуществления, модуль состояния содержит корпус, множество контактов, схему и множество индикаторов. Корпус конструктивно выполнен с возможностью разъемного соединения с хирургическим аппаратом. Каждый отдельный контакт конструктивно выполнен с возможностью электрической связи с другим датчиком, когда корпус подсоединен к хирургическому аппарату. Схема находится в электрической связи с, по меньшей мере, одним из контактов. По меньшей мере, один из индикаторов электрически связан со схемой.
В соответствии с другим общим аспектом, настоящая заявка содержит описание хирургического аппарата. В соответствии с различными вариантами осуществления, хирургический аппарат содержит множество датчиков и модуль состояния, соединенный с возможностью разъема с хирургическим аппаратом. Модуль состояния содержит множество контактов, схему и множество индикаторов. Каждый отдельный контакт электрически связан с другим датчиком. Схема находится в электрической связи с, по меньшей мере, одним из контактов. По меньшей мере, один из индикаторов электрически связан со схемой.
ЧЕРТЕЖИ
В настоящей заявке представлены для примера описания различных вариантов осуществления в сочетании со следующими фигурами:
фигуры 1 и 2 - виды в перспективе хирургического отрезного и фиксирующего аппарата в соответствии с различными вариантами осуществления;
фигуры 3-5 - виды с пространственным разделением деталей концевого эффектора и стержня аппарата в соответствии с различными вариантами осуществления;
фигура 6 - вид сбоку концевого эффектора в соответствии с различными вариантами осуществления;
фигура 7 - вид с пространственным разделением деталей рукоятки аппарата в соответствии с различными вариантами осуществления;
фигуры 8 и 9 - местные виды в перспективе рукоятки в соответствии с различными вариантами осуществления;
фигура 10 - вид сбоку рукоятки в соответствии с различными вариантами осуществления;
фигура 11 - схематическое изображение электрической схемы, применяемой в аппарате в соответствии с различными вариантами осуществления;
фигуры 12-13 - виды сбоку рукоятки в соответствии с различными вариантами осуществления;
фигуры 14-22 - изображения различных механизмов для фиксации замыкающего рычага в соответствии с различными вариантами осуществления;
фигуры 23A-B - изображение универсального шарнира («u-шарнира»), который можно использовать в точке сочленения аппарата в соответствии с различными вариантами осуществления;
фигуры 24A-B - изображение торсионного троса, который можно использовать в точке сочленения аппарата в соответствии с различными вариантами осуществления;
фигуры 25-31 - изображение хирургического отрезного и фиксирующего аппарата с усилением в соответствии с различными вариантами осуществления;
фигуры 32-36 - изображение хирургического отрезного и фиксирующего аппарата с усилением в соответствии с различными вариантами осуществления;
фигуры 37-40 - изображение хирургического отрезного и фиксирующего аппарата с тактильной обратной связью в соответствии с различными вариантами осуществления;
фигуры 41-42 - изображение различных вариантов осуществления пропорционального датчика;
фигура 43 - изображение различных вариантов осуществления хирургического аппарата;
фигура 44 - принципиальная схема хирургического аппарата, показанного на фигуре 43; и
фигуры 45-47 - изображение различных вариантов осуществления участка хирургического аппарата, показанного на фигуре 43.
ПОДРОБНОЕ ОПИСАНИЕ
Следует понимать, что, по меньшей мере, некоторые из фигур и характеристик предлагаемого изобретения упрощены для иллюстрации элементов, которые важны для четкого понимания предлагаемого изобретения, при исключении для ясности других элементов. Специалистам со средним уровнем компетентности в данной области техники будет, однако, очевидно, что данные и другие элементы могут быть желательными. Однако поскольку данные элементы общеизвестны в данной области техники, и поскольку они не способствуют более полному пониманию предлагаемого изобретения, данные элементы не рассматриваются в настоящем описании.
На фигурах 1 и 2 изображен хирургический отрезной и фиксирующий аппарат 10 в соответствии с различными вариантами осуществления настоящего изобретения. Изображенный вариант осуществления представляет собой эндоскопический аппарат и, в общем, описанные здесь варианты осуществления аппарата 10 являются эндоскопическими хирургическими отрезными и фиксирующими аппаратами. Следует отметить, однако, что, в соответствии с другими вариантами осуществления настоящего изобретения, аппарат может быть не эндоскопическим хирургическим отрезным и фиксирующим аппаратом, например лапароскопическим аппаратом.
Хирургический аппарат 10, изображенный на фигурах 1 и 2, содержит рукоятку 6, стержень 8 и шарнирно-поворотный концевой эффектор 12, шарнирно соединенный со стержнем 8 в шарнире 14 сочленения. Вблизи рукоятки 6 может быть обеспечено устройство 16 управления шарнирным поворотом для осуществления поворота концевого эффектора 12 на шарнире 14 сочленения. В показанном варианте осуществления концевой эффектор 12 выполнен с возможностью выполнения функции эндоскопического режущего инструмента для сжатия, отрезания и сшивания скобками ткани, хотя в других вариантах осуществления можно применять концевые эффекторы других типов, например концевые эффекторы для хирургических устройств других типов, например захваты, режущие приспособления, сшивающие скобками аппараты, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства генной терапии к месту действия, ультразвуковые, RF- или лазерные устройства и т.п.
Рукоятка 6 аппарата 10 может содержать замыкающий рычаг 18 и рычаг 20 прошивки для приведения в действие концевого эффектора 12. Специалистам в данной области техники очевидно, что аппараты, содержащие концевые эффекторы, предназначенные для разных хирургических целей, могут содержать разные количества или типы рычагов или других подходящих элементов управления для манипулирования концевым эффектором 12. Концевой эффектор 12 показан отделенным от рукоятки 6 предпочтительно удлиненным стержнем 8. В одном варианте осуществления врач или хирург, оперирующий аппаратом 10, может шарнирно поворачивать концевой эффектор 12 относительно стержня 8 с помощью устройства 16 управления шарнирным поворотом, как более подробно описано в находящейся на рассмотрении заявке на патент США № 11/329020, поданной 10 января 2006 г., «Surgical Instrument Having An Articulating End Effector», изобретателей Geoffrey C. Hueil et al., которая включена в настоящее описание путем отсылки.
В настоящем примере концевой эффектор 12 содержит помимо прочего желоб 22 для скобок и зажимной элемент с возможностью поворотно-поступательного перемещения, например упор 24, которые удерживаются на некотором разделяющем их расстоянии, которое обеспечивает эффективное сшивание скобками и отрезание ткани, зажатой в концевом эффекторе 12. Рукоятка 6 содержит ручку 26 пистолетного типа, к которой замыкающий рычаг 18 подтягивается поворотным движением врачом для осуществления зажима или примыкания упора 24 к желобу 22 для скобок концевого эффектора 12, чтобы тем самым зажимать ткань, расположенную между упором 24 и желобом 22. Рычаг 20 прошивки находится дальше снаружи от замыкающего рычага 18. После того, как замыкающий рычаг 18 зафиксируется в положении примыкания, как дополнительно поясняется ниже, рычаг 20 прошивки может сделать небольшой поворот к ручке 26 пистолетного типа настолько, что его сможет достать оперирующий хирург, работающий одной рукой. Затем оперирующий хирург может подтянуть поворотным движением рычаг 20 прошивки к ручке 26 пистолетного типа для осуществления сшивания скобками и отрезания ткани, зажатой в концевом эффекторе 12. В других вариантах осуществления возможно применение зажимных элементов других типов, кроме упора 24, например противостоящего зажима и т.п.
Далее следует понимать, что в настоящем описании термины «проксимальный» и «дистальный» применяют для обозначения положения относительно захвата практикующим врачом рукоятки 6 аппарата 10. Следовательно, концевой эффектор 12 является дистальным относительно более проксимальной рукоятки 6. Дополнительно следует понимать, что для удобства и ясности специальные термины, обозначающие пространственное положение, например «вертикальный» и «горизонтальный», использованы в настоящем описании применительно к чертежам. Однако существует множество пространственно-угловых положений применения хирургических аппаратов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Замыкающий рычаг 18 может быть приведен в действие первым. После того, как врач удостоверится в удовлетворительном положении концевого эффектора 12, врач может подтянуть назад замыкающий рычаг 18 в его фиксируемое положение полного примыкания в непосредственной близости от ручки 26 пистолетного типа. Затем можно приводить в действие рычаг 20 прошивки. Рычаг 20 прошивки возвращается в разжатое положение (см. фигуры 1 и 2), когда врач прекращает нажатие, как более полно описано ниже. Деблокирующая кнопка 160 на рукоятке 6, в данном примере на ручке 26 пистолетного типа рукоятки 6, при нажатии может отпустить зафиксированный замыкающий рычаг 18.
На фигуре 3 представлен вид с пространственным разделением деталей концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано в представленном варианте осуществления, концевой эффектор 12 может содержать, в дополнение к вышеупомянутым желобу 22 и упору 24, режущий инструмент 32, скользящий блок 33, кассету 34 для скобок, которая установлена с возможностью извлечения в желобе 22, и винтовой шпиндель 36. Режущий инструмент 32 может представлять собой, например, нож. Упор 24 может быть поворотно-размыкаемым и смыкаемым вокруг оси 25 поворота, соединенной с проксимальным концом желоба 22. Упор 24 может также содержать лапку 27 на своем проксимальном конце, которая вставлена в компонент механической смыкающей системы (дополнительно описанной ниже) для размыкания и смыкания упора 24. Когда замыкающий рычаг 18 приводится в действие, то есть подтягивается пользователем аппарата 10, упор 24 может поворачиваться вокруг оси 25 поворота в сжатое или сомкнутое положение. Если зажатие концевым эффектором 12 является удовлетворительным, то оперирующий хирург может привести в действие рычаг 20 прошивки, который, как более подробно поясняется ниже, приводит нож 32 и скользящий блок 33 в продольное движение по желобу 22, с отрезанием тем самым ткани, зажатой внутри концевого эффектора 12. Перемещение скользящего блока 33 по желобу 22 вызывает выталкивание скобок из кассеты 34 для скобок сквозь отрезанную ткань к сомкнутому упору 24, который загибает скобки для фиксации отрезанной ткани. Патент США № 6978921, «Surgical stapling instrument incorporating an E-beam firing mechanism», который включен в настоящее описание путем отсылки, обеспечивает дополнительные сведения о такого рода двухходовых отрезных и сшивающих аппаратах. В соответствии с различными вариантами осуществления, скользящий блок 33 может быть составной частью кассеты 34, чтобы, когда нож 32 отводится после операции отрезания, скользящий блок 33 не отводился.
Следует отметить, что хотя в вариантах осуществления описанного здесь аппарата 10 применяется концевой эффектор 12, который сшивает скобками отрезанную ткань, в других вариантах осуществления возможно применение отличающихся методов фиксации или скрепления отрезанной ткани. Например, можно также применять концевые эффекторы, которые используют RF-энергию или клеи для фиксации отрезанной ткани. В патенте США № 5810811, «Electrosurgical Hemostatic Device», который включен в настоящее описание путем отсылки, предлагается режущий инструмент, который использует RF-энергию для фиксации отрезанной ткани. В заявке на патент США № 11/267811, «Surgical Stapling Instruments Structured For Delivery Of Medical Agents», и заявке на патент США № 11/267383, «Surgical Stapling Instruments Structured For Pump-Assisted Delivery Of Medical Agents», каждая из которых включена в настоящее описание путем отсылки, предлагается режущий инструмент, который использует клеи для фиксации отрезанной ткани. Соответственно, хотя настоящее описание относится к операциям отрезания/сшивания скобками и подобным нижеследующим, следует понимать, что настоящий вариант осуществления является примерным и не предполагает ограничения. Возможно также использование других методов фиксации тканей.
На фигурах 4 и 5 представлены виды с пространственным разделением деталей, и на фигуре 6 представлен вид сбоку концевого эффектора 12 и стержня 8 в соответствии с различными вариантами осуществления. Как показано в представленных вариантах осуществления, стержень 8 может содержать проксимальную замыкающую трубку 40 и дистальную замыкающую трубку 42, соединенные между собой с возможностью поворота поворотно-соединительными звеньями 44. Дистальная замыкающая трубка 42 содержит отверстие 45, в которое вставлена лапка 27 на упоре 24 для размыкания и смыкания упора 24, как дополнительно поясняется ниже. Внутри замыкающих трубок 40, 42 может быть расположена проксимальная несущая трубка 46. Внутри проксимальной несущей трубки 46 может быть расположен главный поворотный (или проксимальный) ведущий вал 48, который взаимодействует со вспомогательным (или дистальным) ведущим валом 50 через коническую зубчатую передачу 52. Вспомогательный ведущий вал 50 соединен с ведущим зубчатым колесом 54, которое находится в зацеплении с проксимальным ведущим зубчатым колесом 56 винтового шпинделя 36. Когда главный ведущий вал 48 приводят во вращение приведением в действие рычага прошивки (как более подробно поясняется ниже), коническая зубчатая передача 52a-c приводит во вращение вспомогательный ведущий вал 50, который, в свою очередь, вследствие зацепления ведущих зубчатых колес 54, 56 приводит во вращение винтовой шпиндель 36, который вынуждает элемент 32 привода ножа/скользящего блока продольно перемещаться по желобу 22 для отрезания любой ткани, зажатой внутри концевого эффектора 12. Вертикальная коническая шестерня 52b может располагаться и поворачиваться в отверстии 57 в дистальном конце проксимальной несущей трубки 46. Можно применить дистальную несущую трубку 58 для вмещения вспомогательного ведущего вала 50 и ведущих зубчатых колес 54, 56. Главный ведущий вал 48, вспомогательный ведущий вал 50 и шарнирно-поворотный узел (например, коническая зубчатая передача 52a-c) иногда в настоящем описании совместно именуются «узлом главного ведущего вала».
Подшипник 38 установлен на резьбе на винтовом шпинделе 36. Подшипник 38 соединен также с ножом 32. Когда винтовой шпиндель 36 вращается вправо, подшипник 38 движется по винтовому шпинделю 36 в дистальном направлении, с приведением в движение режущего инструмента 32, и в процессе этого движения скользящий блок 33 выполняет операцию отрезания/прошивания скобками. Скользящий блок 33 может быть выполнен, например, из пластика и может иметь скошенную дистальную поверхность. По мере того, как скользящий блок 33 движется по желобу 22, скошенная передняя поверхность может выдвигать вверх или выталкивать скобки из кассеты 34 для скобок сквозь зажатую ткань к упору 24. Упор 24 загибает скобки и тем самым сшивает скобками отрезанную ткань. Когда нож 32 отводится, нож 32 и скользящий блок 33 могут расцепляться, при этом скользящий блок 33 остается на дистальном конце желоба 22.
Вследствие отсутствия у пользователя обратной связи при операции отрезания/сшивания скобками, хирургические аппараты с приводом от двигателя, в которых операция отрезания/сшивания скобками включается простым нажатием кнопки, не получили всеобщего признания врачами. Напротив, в вариантах осуществления настоящего изобретения эндоскопический режущий инструмент с приводом от двигателя обеспечивает пользователя обратной связью по срабатыванию, усилию и/или положению режущего инструмента в концевом эффекторе.
На фигурах 7-10 представлен примерный вариант осуществления эндоскопического режущего инструмента с приводом от двигателя и, в частности, его рукоятки 6, в котором пользователь обеспечен обратной связью по срабатыванию и усилию нагрузки режущего инструмента в концевом эффекторе. Кроме того, данный вариант осуществления может использовать мощность, развиваемую пользователем при отведении назад рычага 20 прошивки, для подачи мощности в устройство (в, так называемом, «бустерном (с усилением)» режиме). Как показано в представленном варианте осуществления, рукоятка 6 содержит внешние нижние боковины 59, 60 и внешние верхние боковины 61, 62, которые собираются с образованием общего внешнего облика рукоятки 6. Батарейка 64, например ионная литиевая батарейка, может быть установлена в участок 26 ручки пистолетного типа рукоятки 6. Батарейка 64 питает электродвигатель 65, расположенный внутри верхнего участка, относящегося к участку 26 ручки пистолетного типа рукоятки 6. В соответствии с разными вариантами осуществления, электродвигатель 65 может быть приводным щеточным электродвигателем постоянного тока с максимальной частотой вращения приблизительно 5000 об/мин. Электродвигатель 65 может приводить в движение 90° коническую зубчатую передачу 66, содержащую первую коническую шестерню 68 и вторую коническую шестерню 70. Коническая зубчатая передача 66 может приводить в движение планетарную зубчатую передачу 72. Планетарная зубчатая передача 72 может содержать ведущую шестерню 74, соединенную с ведущим валом 76. Ведущая шестерня 74 может приводить в движение сопряженный зубчатый венец 78, который приводит в движение барабан 80 винтовой передачи посредством ведущего вала 82. Кольцо 84 может быть посажено на резьбе на барабан 80 винтовой передачи. Следовательно, когда электродвигатель 65 вращается, кольцо 84 приводится в движение по барабану 80 винтовой передачи посредством промежуточной конической зубчатой передачи 66, планетарной зубчатой передачи 72 и зубчатого венца 78.
Рукоятка 6 может также содержать датчик 110 включения электродвигателя, связанный с рычагом 20 прошивки, для определения, когда рычаг 20 прошивки подтянут (или «прижат») к участку 26 ручки пистолетного типа рукоятки 6 оперирующим хирургом, и тем самым для запуска исполнения операции отрезания/сшивания скобками концевым эффектором 12. Датчик 110 может быть пропорциональным датчиком, например реостатом или переменным резистором. Когда рычаг 20 прошивки прижимают, датчик 110 определяет перемещение и передает электрический сигнал, характеризующий напряжение (или мощность) для подачи на электродвигатель 65. Когда датчик 110 является переменным резистором или чем-то подобным, частота вращения электродвигателя 65 может быть, в общем, пропорциональна величине перемещения рычага 20 прошивки. То есть, если оперирующий хирург лишь немного подтягивает или нажимает на рычаг 20 прошивки, то частота вращения электродвигателя 65 является относительно низкой. Когда рычаг 20 прошивки полностью подтянут (или находится в полностью нажатом положении), частота вращения электродвигателя 65 является максимальной. Другими словами, чем сильнее пользователь подтягивает рычаг 20 прошивки, тем более высокое напряжение подается на электродвигатель 65, что обуславливает более высокие частоты вращения.
Рукоятка 6 может содержать среднюю деталь 104 рукоятки, прилегающую к верхнему участку рычага 20 прошивки. Рукоятка 6 может также содержать оттягивающую пружину 112, закрепленную между штырьками на средней детали 104 рукоятки и рычаге 20 прошивки. Оттягивающая пружина 112 может оттягивать рычаг 20 прошивки к его полностью разомкнутому положению. При этом, когда оперирующий хирург отпустит рычаг 20 прошивки, оттягивающая пружина 112 оттянет рычаг 20 прошивки в его разомкнутое положение, что прекращает воздействие на датчик 110 и тем самым останавливает вращение электродвигателя 65. Более того, благодаря оттягивающей пружине 112, каждый раз, когда пользователь прижимает рычаг 20 прошивки, пользователь будет ощущать сопротивление операции прижима, что обеспечивает пользователя обратной связью по значению частоты вращения, развиваемой электродвигателем 65. Кроме того, оперирующий хирург может прекратить отведение назад рычага 20 прошивки для снятия тем самым усилия с датчика 110 и тем самым для останова электродвигателя 65. По существу, пользователь может остановить срабатывание концевого эффектора 12, с обеспечением оперирующего хирурга, в какой-то степени, возможностью управления операцией отрезания/фиксации.
Дистальный конец барабана 80 винтовой передачи содержит дистальный ведущий вал 120, который приводит в движение зубчатый венец 122, который сопрягается с ведущей шестерней 124. Ведущая шестерня 124 соединена с главным ведущим валом 48 узла главного ведущего вала. При этом вращение электродвигателя 65 вызывает вращение узла главного ведущего вала, что приводит в действие концевой эффектор 12 вышеописанным способом.
Кольцо 84, посаженное на резьбе на барабан 80 винтовой передачи, может содержать штырек 86, который расположен внутри прорези 88 в прорезанной кулисе 90. Прорезанная кулиса 90 содержит отверстие 92 на противоположном конце 94, которое вмещает шарнирный палец 96, который присоединен между внешними боковинами 59, 60 рукоятки. Шарнирный палец 96 расположен также с проходом через отверстие 100 в рычаге 20 прошивки и отверстие 102 в средней детали 104 рукоятки.
Кроме того, рукоятка 6 может содержать датчик 130 реверса электродвигателя (или конца хода) и датчик 142 останова электродвигателя (или начала хода). В различных вариантах осуществления датчик 130 реверса электродвигателя может быть концевым переключателем, расположенным на дистальном конце барабана 80 винтовой передачи, так что кольцо 84, установленное на резьбе на барабане 80 винтовой передачи, входит в контакт с датчиком 130 реверса электродвигателя и включает его, когда кольцо 84 достигает дистального конца барабана 80 винтовой передачи. Датчик 130 реверса электродвигателя при включении посылает в электродвигатель 65 сигнал на реверсирование направления его вращения и тем самым на отведение ножа 32 концевого эффектора 12 по окончании операции отрезания.
Датчик 142 останова электродвигателя может быть, например, нормально замкнутым концевым переключателем. В разных вариантах осуществления упомянутый датчик может располагаться на проксимальном конце барабана 80 винтовой передачи, чтобы кольцо 84 размыкало датчик 142, когда кольцо 84 достигнет проксимального конца барабана 80 винтовой передачи.
Во время работы, когда хирург, оперирующий аппаратом 10, подтягивает назад рычаг 20 прошивки, датчик 110 определяет расположение рычага 20 прошивки и посылает сигнал в электродвигатель 65 для включения переднего вращения электродвигателя 65 с частотой, например, пропорциональной тому, насколько сильно оперирующий хирург подтягивает рычаг 20 прошивки. Переднее вращение электродвигателя 65, в свою очередь, обуславливает вращение зубчатого венца 78 на дистальном конце планетарной зубчатой передачи 72 и тем самым приводит к вращению барабана 80 винтовой передачи, что вызывает движение кольца 84, установленного на резьбе на барабане 80 винтовой передачи, в дистальном направлении по барабану 80 винтовой передачи. Вращение барабана 80 винтовой передачи приводит во вращение также вышеописанный узел главного ведущего вала, что, в свою очередь, вызывает срабатывание ножа 32 в концевом эффекторе 12. То есть, нож 32 и скользящий блок 33 приводятся в продольное движение по желобу 22 с отрезанием тем самым ткани, зажатой в концевом эффекторе 12. Кроме того, вынуждается выполнение операции сшивания скобками концевым эффектором 12 в тех вариантах осуществления, в которых применяется сшивающий скобками концевой эффектор.
К моменту, когда операция отрезания/сшивания скобками концевым эффектором 12 будет закончена, кольцо 84 на барабане 80 винтовой передачи продвинется до дистального конца барабана 80 винтовой передачи и тем самым вызовет включение датчика 130 реверса электродвигателя, который посылает сигнал в электродвигатель 65 для осуществления реверсирования вращения электродвигателя 65. Это, в свою очередь, вызывает отведение ножа 32, а также приводит кольцо 84 на барабане 80 винтовой передачи в обратное движение к проксимальному концу барабана 80 винтовой передачи.
Средняя деталь 104 рукоятки имеет задний заплечик 106, который входит в зацепление с прорезанной кулисой 90, как лучше всего показано на фигурах 8 и 9. Средняя деталь 104 рукоятки имеет также передний упор 107 перемещения, который входит в зацепление с рычагом 20 прошивки. Перемещение прорезанной кулисы 90 регулируется, как поясняется выше, вращением электродвигателя 65. Когда прорезанная кулиса 90 поворачивается против часовой стрелки (CCW) в то время, как кольцо 84 движется от проксимального конца барабана 80 винтовой передачи к дистальному концу, средняя деталь 104 рукоятки будет иметь свободу поворота против часовой стрелки. Следовательно, по мере того, как пользователь будет прижимать рычаг 20 прошивки, рычаг 20 прошивки будет входить в зацепление с передним упором 107 перемещения средней детали 104 рукоятки и тем самым будет вынуждать среднюю деталь 104 рукоятки вращаться против часовой стрелки. Однако вследствие зацепления заднего заплечика 106 с прорезанной кулисой 90, средняя деталь 104 рукоятки сможет поворачиваться против часовой стрелки лишь настолько, насколько допускает прорезанная кулиса 90. При этом, если электродвигатель 65 должен перестать вращаться по какой-либо причине, то прорезанная кулиса 90 перестанет поворачиваться, и пользователь не сможет дальше прижимать рычаг 20 прошивки, так как средняя деталь 104 рукоятки не будет свободно поворачиваться против часовой стрелки из-за прорезанной кулисы 90.
На фигурах 41 и 42 представлено изображение двух состояний датчика переменной величины, который можно использовать в качестве датчика 110 включения электродвигателя в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может содержать лобовой участок 280, первый электрод (A) 282, второй электрод (B) 284 и сжимаемый диэлектрический материал 286 (например, EAP (электроактивный полимер)) между электродами 282, 284. Датчик 110 может быть расположен так, что лобовой участок 280 контактирует с рычагом 20 прошивки при его отведении назад. Соответственно, когда рычаг 20 прошивки отводят назад, диэлектрический материал 286 сжимается, как показано на фигуре 42, так что электроды 282, 284 сближаются. Поскольку расстояние «b» между электродами 282, 284 непосредственно связано с полным сопротивлением между электродами 282, 284, то чем больше расстояние, тем больше полное сопротивление, и чем короче расстояние, тем меньше полное сопротивление. При этом величина усилия сжатия диэлектрика 286 из-за отведения назад рычага 20 прошивки (обозначенного как усилие «F» на фигуре 42) пропорционально полному сопротивлению между электродами 282, 284, которое можно использовать для пропорционального управления электродвигателем 65.
Компоненты примерной смыкающей системы для смыкания (или сжатия) упора 24 концевого эффектора 12 посредством отведения назад замыкающего рычага 18 также показаны на фигурах 7-10. В представленном варианте осуществления смыкающая система содержит вилку 250, соединенную с замыкающим рычагом 18 с помощью пальца 251, который вставлен сквозь совмещенные отверстия как в замыкающем рычаге 18, так и в вилке 250. Шарнирный палец 252, на котором поворачивается замыкающий рычаг 18, вставлен сквозь другое отверстие в замыкающем рычаге 18, которое смещено от места, где палец 251 вставлен сквозь замыкающий рычаг 18. Следовательно, отведение назад замыкающего рычага 18 вынуждает верхнюю часть замыкающего рычага 18, к которой вилка 250 прикреплена пальцем 251, поворачиваться против часовой стрелки. Дистальный конец вилки 250 соединен пальцем 254 с первой замыкающей скобой 256. Первая замыкающая скоба 256 соединяется со второй замыкающей скобой 258. Замыкающие скобы 256, 258 вместе образуют отверстие, в которое посажен и зафиксирован проксимальный конец проксимальной замыкающей трубки 40 (см. фигуру 4) так, что продольное перемещение замыкающих скоб 256, 258 вызывает продольное перемещение проксимальной замыкающей трубки 40. Аппарат 10 содержит также замыкающий шток 260, находящийся внутри проксимальной замыкающей трубки 40. Замыкающий шток 260 может содержать проем 261, в который входит стойка 263 одной из внешних деталей рукоятки, например внешней нижней боковины 59 в показанном варианте осуществления, для жесткого соединения замыкающего штока 260 с рукояткой 6. При этом проксимальная замыкающая трубка 40 может продольно перемещаться относительно замыкающего штока 260. Замыкающий шток 260 может также содержать дистальный кольцевой выступ 267, который входит в проточку 269 в проксимальной несущей трубке 46 и фиксируется в данной проточке крышкой 271 (см. фигуру 4).
Когда в процессе работы вилка 250 поворачивается из-за перемещения назад замыкающего рычага 18, замыкающие скобы 256, 258 вынуждают проксимальную замыкающую трубку 40 перемещаться в дистальном направлении (т.е. от рукояточного конца аппарата 10), что вызывает перемещение дистальной замыкающей трубки 42 в дистальном направлении, что, в свою очередь, вызывает поворот упора 24 вокруг оси 25 поворота в зажатое или сомкнутое положение. Когда замыкающий рычаг 18 деблокируется из положения фиксации, проксимальная замыкающая трубка 40 принуждается к сдвигу в проксимальном направлении, что приводит к сдвигу дистальной замыкающей трубки 42 в проксимальном направлении, что, в свою очередь, благодаря лапке 27, вставленной в отверстие 45 дистальной замыкающей трубки 42, вызывает поворот упора 24 вокруг оси 25 поворота в разомкнутое или несжатое положение. При этом путем отведения назад и фиксации замыкающего рычага 18 оперирующий хирург может зажать ткань между упором 24 и желобом 22 и может разжать ткань после операции отрезания/сшивания скобками путем деблокирования замыкающего рычага 18 из положения фиксации.
На фигуре 11 представлена принципиальная схема электрической цепи аппарата 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оперирующий хирург первоначально подтягивает рычаг 20 прошивки после фиксации замыкающего рычага 18, датчик 110 включается и допускает протекание через него тока. Если нормально разомкнутый переключатель 130 датчика реверса электродвигателя находится в разомкнутом состоянии (что означает, что конец хода концевого эффектора еще не достигнут), ток будет протекать к однополюсному двухпозиционному реле 132. Поскольку переключатель 130 датчика реверса электродвигателя не замкнут, то катушка 134 индуктивности реле 132 не будет возбуждена, и поэтому реле 132 будет находиться в своем невозбужденном состоянии. Схема содержит также переключатель 136 датчика блокировки по кассете. Если концевой эффектор 12 содержит кассету 34 для скобок, то переключатель датчика 136 будет находиться в замкнутом состоянии и тем самым будет допускать протекание тока. В ином случае, если концевой эффектор 12 не содержит кассеты 34 для скобок, то переключатель датчика 136 будет разомкнутым и тем самым не будет допускать питания электродвигателя 65 от батарейки 64.
Когда кассета 34 для скобок присутствует, переключатель датчика 136 замкнут, и тогда однополюсное однопозиционное реле 138 получает питание. Когда реле 138 получает питание, ток протекает через реле 138, через датчик 110 на переменном резисторе и при посредстве двухполюсного двухпозиционного реле 140 через электродвигатель 65, и следовательно, питает электродвигатель 65 и обеспечивает его переднее вращение.
Когда концевой эффектор 12 достигнет конца своего хода, датчик 130 реверса электродвигателя включится, и тем самым переключатель 130 замкнется, и реле 132 получит питание. В результате этого реле 132 переключается в его возбужденное состояние (не показанное на фигуре 11), что приводит к протеканию тока в обход переключателя датчика 136 блокировки по кассете и переменного резистора 110 и тем самым вынуждает ток протекать как через нормально замкнутое двухполюсное двухпозиционное реле 140, так и обратно через электродвигатель 65, но, благодаря реле 140, таким образом, что происходит реверс направления вращения электродвигателя 65.
Поскольку переключатель 142 датчика останова электродвигателя является нормально замкнутым, ток будет протекать обратно через реле 134 и удерживать его замкнутым, пока переключатель 142 не разомкнется. Когда нож 32 полностью отводится, переключатель 142 датчика останова электродвигателя срабатывает и тем самым вызывает размыкание переключателя 142, с выключением, в результате, питания электродвигателя 65.
В других вариантах осуществления вместо пропорционального датчика 110 можно применить двоичный датчик. В таких вариантах осуществления частота вращения электродвигателя 65 не будет пропорциональной усилию, прилагаемому оперирующим хирургом. Вместо этого электродвигатель 65 вращался бы обычно с постоянной частотой. Но оперирующий хирург продолжал бы ощущать обратную связь по усилию, так как рычаг 20 прошивки включен в цепь зубчатых передач привода.
На фигуре 12 представлен вид сбоку рукоятки 6 механизированного эндоскопического режущего инструмента с усилением в соответствии с другим вариантом осуществления. Вариант осуществления на фигуре 12 аналогичен варианту осуществления на фигурах 7-10, за исключением того, что в варианте осуществления на фигуре 12 отсутствует прорезанная кулиса 90, соединенная с кольцом 84, установленным на резьбе на барабан 80 винтовой передачи. Вместо этого в варианте осуществления на фигуре 12 кольцо 84 содержит участок 114 датчиков, который перемещается с кольцом 84 по мере того, как кольцо 84 движется до конца (и обратно) на барабане 80 винтовой передачи. Участок 114 датчиков содержит вырез 116. Датчик 130 реверса электродвигателя может находиться на дистальном конце выреза 116, и датчик 142 останова электродвигателя может находиться на проксимальном конце выреза 116. Когда кольцо 84 перемещается до конца (и обратно) на барабане 80 винтовой передачи, участок 114 датчиков перемещается вместе с ним. Кроме того, как показано на фигуре 12, средняя деталь 104 может иметь кулису 118, которая продолжается в вырез 116.
Во время работы, когда хирург, оперирующий аппаратом 10, отводит рычаг 20 прошивки назад к ручке 26 пистолетного типа, датчик 110 включения электродвигателя определяет движение и посылает сигнал включения питания электродвигателя 65, который, помимо прочего, приводит во вращение барабан 80 винтовой передачи. В то время, когда барабан 80 винтовой передачи вращается, кольцо 84, установленное на резьбе на барабане 80 винтовой передачи, продвигается вперед (или отводится назад, в зависимости от направления вращения). Кроме того, вследствие подтягивания рычага 20 прошивки средняя деталь 104 принуждается к повороту против часовой стрелки вместе с рычагом 20 прошивки благодаря переднему упору 107 перемещения, который находится в зацеплении с рычагом 20 прошивки. Поворот средней детали 104 против часовой стрелки вынуждает кулису 118 поворачиваться против часовой стрелки с участком 114 датчиков кольца 84, так что кулиса 118 остается расположенной в вырезе 116. Когда кольцо 84 достигает дистального конца барабана 80 винтовой передачи, кулиса 118 войдет в контакт с датчиком 130 реверса электродвигателя и тем самым вызовет срабатывание этого датчика. Аналогично, когда кольцо 84 достигает проксимального конца барабана 80 винтовой передачи, кулиса 118 войдет в контакт с датчиком 142 останова электродвигателя и тем самым вызовет срабатывание этого датчика. Описанные действия могут, соответственно, реверсировать и останавливать электродвигатель 65, как изложено выше.
На фигуре 13 представлен вид сбоку рукоятки 6 механизированного эндоскопического режущего инструмента с усилением в соответствии с другим вариантом осуществления. Вариант осуществления на фигуре 13 аналогичен варианту осуществления на фигурах 7-10, за исключением того, что в варианте осуществления на фигуре 13 отсутствует прорезь в кулисе 90. Вместо этого кольцо 84, установленное на резьбе на барабане 80 винтовой передачи, содержит вертикальный паз 126. Вместо прорези кулиса 90 содержит штырек 128, который расположен в пазу 126. Когда барабан 80 винтовой передачи вращается, кольцо 84, посаженное на резьбе на барабан 80 винтовой передачи, продвигается вперед (или отводится назад, в зависимости от направления вращения). Кулиса 90 поворачивается против часовой стрелки по мере того, как кольцо 84 продвигается вперед, благодаря штырьку 128, расположенному в пазу 126, как показано на фигуре 13.
Как упоминалось выше, при применении двухходового механизированного аппарата оперирующий хирург сначала подтягивает назад и фиксирует замыкающий рычаг 18. На фигурах 14 и 15 представлен один вариант осуществления метода фиксации замыкающего рычага 18 к участку 26 ручки пистолетного типа рукоятки 6. В изображенном варианте осуществления участок 26 ручки пистолетного типа содержит зацеп 150, который поджат в поворот против часовой стрелки на оси 151 поворота торсионной пружиной 152. Кроме того, замыкающий рычаг 18 содержит замыкающую перекладину 154. По мере того, как оперирующий хирург подтягивает замыкающий рычаг 18, замыкающая перекладина 154 входит в контакт со скошенным участком 156 зацепа 150 и тем самым поворачивает зацеп 150 вверх (или по часовой стрелке на фигурах 14-15), пока замыкающая перекладина 154 не пройдет полностью скошенный участок 156 и не войдет в вырез 158 зацепа 150, который фиксирует замыкающий рычаг 18 в данном положении. Оперирующий хирург может отцепить замыкающий рычаг 18 нажимом вниз на сдвижную деблокирующую кнопку 160 на задней или противоположной стороне участка 26 ручки пистолетного типа. Нажим вниз на сдвижную деблокирующую кнопку 160 поворачивает зацеп 150 по часовой стрелке так, что замыкающая перекладина 154 высвобождается из выреза 158.
На фигуре 16 изображен другой механизм фиксации замыкающего рычага в соответствии с различными вариантами осуществления. В варианте осуществления на фигуре 16 замыкающий рычаг 18 содержит клин 160, имеющий стреловидный участок 161. Стреловидный участок 161 поджат вниз (или по часовой стрелке) плоской пружиной 162. Клин 160 и плоская пружина 162 могут быть выполнены из, например, литого пластика. Когда замыкающий рычаг 18 отводят назад, стреловидный участок 161 вставляется через отверстие 164 в участке 26 ручки пистолетного типа рукоятки 6. Нижняя скошенная поверхность 166 стреловидного участка 161 входит в контакт с нижней боковой стенкой 168 отверстия 164, что заставляет стреловидный участок 161 поворачиваться против часовой стрелки. В конечном счете нижняя скошенная поверхность 166 полностью проходит нижнюю боковую стенку 168 и, в результате, снимается усилие, действующее против часовой стрелки на стреловидный участок 161, и происходит вход нижней боковой стенки 168 в зафиксированное положение в вырезе 170 позади стреловидного участка 161.
Для деблокирования замыкающего рычага 18 пользователь нажимает вниз на кнопку 172 на противоположной стороне замыкающего рычага 18, чем заставляет стреловидный участок 161 поворачиваться против часовой стрелки и позволяет стреловидному участку 161 высвободиться из отверстия 164.
На фигурах 17-22 изображен механизм фиксации замыкающего рычага в соответствии с другим вариантом осуществления. Как показано в данном варианте осуществления, замыкающий рычаг 18 содержит гибкую продольную консоль 176, которая содержит боковой палец 178, отходящий от нее. Консоль 176 и палец 178 можно выполнить, например, из литого пластика. Участок 26 ручки пистолетного типа рукоятки 6 содержит отверстие 180 с поперечно продолжающимся клином 182, расположенным в нем. Когда замыкающий рычаг 18 отводят назад, палец 178 входит в контакт с клином 182, и палец 178 прижимается вниз (т.е. консоль 176 поворачивается по часовой стрелке) нижней поверхностью 184 клина 182, как показано на фигурах 17 и 18. Когда палец 178 полностью проходит нижнюю поверхность 184, усилие, действующее по часовой стрелке на консоль 176, снимается, и палец 178 поворачивается против часовой стрелки так, что палец 178 приходит в неподвижное состояние в вырез 186 за клином 182, как показано на фигуре 19 и тем самым фиксирует замыкающий рычаг 18. Палец 178 дополнительно фиксируется в заданном месте в фиксированном положении гибким упором 188, продолжающимся из клина 184.
Для деблокирования замыкающего рычага 18 оперирующий хирург может дополнительно прижать замыкающий рычаг 18, чем привести палец 178 в контакт с наклонной задней стенкой 190 отверстия 180, вследствие чего палец 178 выдавливается вверх мимо гибкого упора 188, как показано на фигурах 20 и 21. Тогда палец 178 высвобождается для выхода через верхней проход 192 из отверстия 180 так, что замыкающий рычаг 18 больше не зафиксирован к участку 26 ручки пистолетного типа, как показано на фигуре 22.
На фигурах 23A-B изображен универсальный шарнир («u-шарнир») 195. Вторая деталь 195-2 u-шарнира 195 поворачивается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На фигуре 23A показан u-шарнир 195 с линейной (180°) угловой ориентацией, и на фигуре 23B показан u-шарнир 195 с ориентацией по углом около 150°. U-шарнир 195 можно применить вместо конических шестерен 52a-c (смотри, например, фигуру 4) в точке 14 сочленения узла главного ведущего вала для шарнирного поворота концевого эффектора 12. На фигурах 24A-B показан торсионный трос 197, который можно применить вместо как конических шестерен 52a-c, так и u-шарнира 195 для осуществления шарнирного поворота концевого эффектора 12.
На фигурах 25-31 представлен другой вариант осуществления механизированного двухходового хирургического отрезного и фиксирующего аппарата 10 с усилением в соответствии с другим вариантом осуществления настоящего изобретения. Вариант осуществления, показанный на фигурах 25-31, аналогичен варианту осуществления, показанному на фигурах 6-10, за исключением того, что вместо барабана 80 винтовой передачи вариант осуществления, показанный на фигурах 25-31, содержит альтернативный шестеренный приводной узел. Вариант осуществления фигур 25-31 содержит редукторный узел 200, содержащий несколько шестерен, расположенных в корпусной раме 201, где шестерни установлены между планетарной зубчатой передачей 72 и ведущей шестерней 124 на проксимальном конце ведущего вала 48. Как дополнительно поясняется ниже, редукторный узел 200 обеспечивает пользователя через рычаг 20 прошивки обратной связью по срабатыванию и усилию нагрузки концевого эффектора 12. Кроме того, пользователь может обеспечивать подачу мощности в систему через редукторный узел 200 для поддержки срабатывания концевого эффектора 12. В этом смысле, аналогично вышеописанным вариантам осуществления, вариант осуществления, показанный на фигурах 25-31, представляет собой другой механизированный аппарат 10 с усилением, который обеспечивает пользователя обратной связью по усилию нагрузки, испытываемой режущим инструментом 32.
В показанном варианте осуществления рычаг 20 прошивки содержит две детали: основной корпусной участок 202 и укрепляющий участок 204. Основной корпусной участок 202 может быть выполнен, например, из пластика, и укрепляющий участок 204 может быть выполнен из более жесткого материала, например металла. В показанном варианте осуществления укрепляющий участок 204 прилегает к основному корпусному участку 202, но, в соответствии с другими вариантами осуществления, укрепляющий участок 204 может быть расположен внутри основного корпусного участка 202. Шарнирный палец 207 может быть вставлен сквозь отверстия в деталях 202, 204 рычага прошивки и может быть точкой, относительно которой поворачивается рычаг 20 прошивки. Кроме того, пружина 222 может оттягивать рычаг 20 прошивки в направлении поворота против часовой стрелки. Пружина 222 может иметь дистальный конец, подсоединенный к штырьку 224, который подсоединен к деталям 202, 204 рычага 20 прошивки. Проксимальный конец пружины 222 может быть присоединен к одной из внешних нижних боковин 59, 60 рукоятки.
В показанном варианте осуществления как основной корпусной участок 202, так и укрепляющий участок 204 содержат зубчатые участки 206, 208 (соответственно) на их верхних торцевых участках. Зубчатые участки 206, 208 находятся в зацеплении с шестерней в редукторном узле 200, как поясняется ниже, для приведения в движение узла главного ведущего вала и для обеспечения пользователя обратной связью по степени срабатывания концевого эффектора 12.
Редукторный узел 200 может содержать, как показано в представленном варианте осуществления, шесть (6) шестерен. Первая шестерня 210 редукторного узла 200 находится в зацеплении с зубчатыми участками 206, 208 рычага 20 прошивки. Кроме того, первая шестерня 210 находится в зацеплении со второй шестерней 212 меньшего размера, при этом вторая шестерня 212 меньшего размера является соосной с третьей шестерней 214 большего размера. Третья шестерня 214 находится в зацеплении с четвертой шестерней 216 меньшего размера, при этом четвертая шестерня меньшего размера является соосной с пятой шестерней 218. Пятая шестерня 218 является 90° конической шестерней, которая находится в зацеплении с сопряженной 90° конической шестерней 220 (лучше всего показанной на фиг. 31), которая соединена с ведущей шестерней 124, которая приводит в движение главный ведущий вал 48.
Во время работы, когда пользователь отводит назад рычаг 20 прошивки, датчик включения электродвигателя (не показанный) включается, что может обеспечить сигнал, вызывающий вращение электродвигателя 65, с силой сигнала, пропорциональной величине усилия, с которым оперирующий хирург отводит назад рычаг 20 прошивки. Тем самым электродвигатель 65 приводится во вращение с частотой, пропорциональной сигналу от датчика. Датчик для данного варианта осуществления не показан, но может быть сходным с вышеописанным датчиком 110 включения двигателя. Датчик можно расположить в рукоятке 6 так, что датчик испытывает нажим, когда рычаг 20 прошивки отводится назад. Кроме того, вместо пропорционального датчика можно применить двоичный датчик.
Вращение электродвигателя 65 вызывает вращение конических шестерен 66, 70 и тем самым вызывает вращение планетарной зубчатой передачи 72, что приводит через ведущий вал 76 во вращение зубчатый венец 122. Зубчатый венец 122 находится в зацеплении с ведущей шестерней 124, которая соединена с главным ведущим валом 48. Следовательно, вращение ведущей шестерни 124 приводит во вращение главный ведущий вал 48, который приводит в исполнение операцию отрезания/сшивания скобками концевым эффектором 12.
Переднее вращение ведущей шестерни 124, в свою очередь, вызывает вращение конической шестерни 220, что приводит посредством остальных шестерен редукторного узла 200 во вращение первую шестерню 210. Первая шестерня 210 находится в зацеплении с зубчатыми участками 206, 208 рычага 20 прошивки и тем самым вынуждает рычаг 20 прошивки поворачиваться против часовой стрелки, когда электродвигатель 65 обеспечивает продвижение вперед концевого эффектора 12 (и поворачиваться по часовой стрелке, когда электродвигатель 65 вращается в реверсном направлении для отвода концевого эффектора 12). При этом пользователь воспринимает обратную связь по усилию нагрузки и срабатыванию концевого эффектора 12 через захват пользователем рычага 20 прошивки. Следовательно, когда пользователь будет отводить назад рычаг 20 прошивки, он будет ощущать сопротивление, связанное с усилием нагрузки, действующим на концевой эффектор 12. Аналогично, когда оперирующий хирург отпускает рычаг 20 прошивки после операции отрезания/прошивания скобками, чтобы он мог вернуться в его исходное положение, пользователь будет испытывать усилие поворота по часовой стрелке со стороны рычага 20 прошивки, которое, в общем, пропорционально частоте реверсного вращения электродвигателя 65.
Следует также отметить, что в данном варианте осуществления пользователь может прилагать усилие (либо вместо, либо в дополнение к усилию электродвигателя 65) для приведения в движение узла главного ведущего вала (и, потому, для выполнения операции отрезания/сшивания скобками концевым эффектором 12) посредством отведения назад рычага 20 прошивки. То есть, отведение назад рычага 20 прошивки вынуждает зубчатые участки 206, 208 поворачиваться против часовой стрелки, что приводит во вращение шестерни редукторного узла 200 и тем самым вызывает вращение ведущей шестерни 124, которая приводит во вращение главный ведущий вал 48.
Хотя на фигурах 25-31 не показано, но аппарат 10 может дополнительно содержать датчики реверса электродвигателя и останова электродвигателя. Как пояснялось выше, датчики реверса электродвигателя и останова электродвигателя могут обнаруживать, соответственно, конец хода отрезания (полное срабатывание ножа 32 и скользящего блока 33) и конец операции отведения (полное отведение ножа 32). Для соответствующего питания электродвигателя 65 можно применить схему, аналогичную схеме, описанной ранее в связи с фигурой 11.
На фигурах 32-36 изображен двухходовой механизированный отрезной и фиксирующий аппарат 10 с усилением в соответствии с другим вариантом осуществления. Вариант осуществления, изображенный на фигурах 32-36, аналогичен варианту фигур 25-31, за исключением того, что в варианте осуществления фигур 32-36 рычаг 20 прошивки содержит нижний участок 228 и верхний участок 230. Оба участка 228, 230 соединены с шарнирным пальцем 207, который расположен с проходом сквозь каждый участок 228, 230, и поворачиваются на нем. Верхний участок 230 содержит зубчатый участок 232, который находится в зацеплении с первой шестерней 210 редукторного узла 200. Пружина 222 присоединена к верхнему участку 230 так, что верхний участок оттягивается с поворотом в направлении по часовой стрелке. Верхний участок 230 может также содержать нижний кронштейн 234, который контактирует с верхней поверхностью нижнего участка 228 рычага 20 прошивки, чтобы, когда верхний участок 230 приводится в поворотное движение по часовой стрелке, нижний участок 228 поворачивался также по часовой стрелке, а когда нижний участок 228 поворачивается против часовой стрелки, верхний участок 230 поворачивался также против часовой стрелки. Аналогично, нижний участок 228 содержит поворотный упор 238, который находится в зацеплении с нижним заплечиком верхнего участка 230. При этом, когда верхний участок 230 приводится в поворотное движение против часовой стрелки, нижний участок 228 также поворачивается против часовой стрелки, а когда нижний участок 228 поворачивается по часовой стрелке, верхний участок 230 также поворачивается по часовой стрелке.
Изображенный вариант осуществления содержит также датчик 110 включения электродвигателя, который передает в электродвигатель 65 сигнал, который в разных вариантах осуществления может вызывать вращение электродвигателя 65 с частотой, пропорциональной усилию, прилагаемому оперирующим хирургом при отведении назад рычага 20 прошивки. Датчик 110 может представлять собой, например, реостат или какой-то другой датчик на переменном сопротивлении, как поясняется в настоящем описании. Кроме того, аппарат 10 может содержать датчик 130 реверса электродвигателя, который включается или переключается при контакте с ним передней поверхности 242 верхнего участка 230 рычага 20 прошивки. При приведении в действие датчик 130 реверса электродвигателя посылает в электродвигатель 65 сигнал на реверсирование направления. Аппарат 10 может также содержать датчик 142 останова электродвигателя, который размыкается или срабатывает при контактном воздействии на него нижним участком 228 рычага 20 прошивки. При приведении в действие датчик 142 останова электродвигателя посылает сигнал на останов реверсивного вращения электродвигателя 65.
Во время работы, когда оперирующий хирург отводит назад замыкающий рычаг 18 в фиксированное положение, рычаг 20 прошивки немного отводится назад (механизмами, известными в данной области техники, в том числе из патента США № 6978921, «Surgical Stapling Instrument Incorporating An E-Beam Firing Mechanism», и патента США № 6905057, «Surgical Stapling Instrument Incorporating A Firing Mechanism Having A Linked Rack Transmission», которые включены в настоящее описание путем отсылки), чтобы пользователь смог захватить рычаг 20 прошивки для начала операции отрезания/сшивания скобками, как показано на фигурах 32 и 33. С этого момента, как показано на фигуре 33, зубчатый участок 232 верхнего участка 230 рычага 20 прошивки перемещается в зацепление с первой шестерней 210 редукторного узла 200. Когда оперирующий хирург отводит назад рычаг 20 прошивки, в соответствии с разными вариантами осуществления рычаг 20 прошивки может повернуться немного, например на пять градусов, до включения датчика 110 включения электродвигателя, как показано на фигуре 34. Приведение в действие датчика 110 вызывает переднее вращение электродвигателя 65 с частотой, пропорциональной усилию отведения, прилагаемому оперирующим хирургом. Переднее вращение электродвигателя 65 приводит, как изложено выше, во вращение главный ведущий вал 48, что вызывает срабатывание ножа 32 в концевом эффекторе 12 (т.е. начало хода по желобу 22). Вращение ведущей шестерни 124, которая соединена с главным ведущим валом 48, приводит к вращению шестерен 210-220 в редукторном узле 200. Поскольку первая шестерня 210 находится в зацеплении с зубчатым участком 232 верхнего участка 230 рычага 20 прошивки, то верхний участок 230 приводится в поворотное движение против часовой стрелки, что вызывает также поворот нижнего участка 228 против часовой стрелки.
Когда нож 32 отрабатывает полностью (т.е. находится в конце хода отрезания), передняя поверхность 242 верхнего участка 230 включает датчик 130 реверса электродвигателя, который посылает сигнал в электродвигатель 65 для реверсирования направления вращения. Это приводит к тому, что узел главного ведущего вала изменяет направление вращения на обратное для отведения назад ножа 32. Вращение узла главного ведущего вала в обратном направлении приводит к обращению направления вращения шестерен 210-220 в редукторном узле, что вызывает поворот по часовой стрелке верхнего участка 230 рычага 20 прошивки, вследствие чего нижний участок 228 рычага 20 прошивки поворачивается по часовой стрелке, пока передняя поверхность 242 верхнего участка 230 не расцепляет или не вызывает срабатывание датчика 142 останова электродвигателя, когда нож 32 отведен полностью, что приводит к останову электродвигателя 65. При этом пользователь воспринимает обратную связь по срабатыванию концевого эффектора 12 через захват пользователем рычага 20 прошивки. Следовательно, когда пользователь будет отводить назад рычаг 20 прошивки, он будет испытывать сопротивление, связанное со степенью срабатывания концевого эффектора 12 и, в частности, с усилием нагрузки, действующим на нож 32. Аналогично, когда оперирующий хирург отпускает рычаг 20 прошивки по окончании операции отрезания/сшивания скобками, чтобы данный рычаг мог вернуться в его первоначальное положение, оперирующий хирург будет испытывать усилие, оказываемое в сторону поворота по часовой стрелке рычагом 20 прошивки, которое, в общем, пропорционально частоте реверсного вращения электродвигателя 65.
Следует также отметить, что в данном варианте осуществления пользователь может прилагать усилие (либо вместо, либо в дополнение к усилию электродвигателя 65) для приведения в движение узла главного ведущего вала (и, следовательно, для выполнения операции отрезания/сшивания скобками концевым эффектором 12) при отведении назад рычага 20 прошивки. То есть, отведение назад рычага 20 прошивки обуславливает поворот против часовой стрелки зубчатого участка 232 верхнего участка 230, что вынуждает шестерни редукторного узла 200 вращаться и тем самым приводить во вращение ведущую шестерню 124, которая приводит во вращение узел главного ведущего вала.
В вышеописанных вариантах осуществления применялись системы с усилением и обратной связью для пользователя, с применением или без адаптивного управления (например, с использованием датчиков 110, 130 и 142, не входящих в замкнутую систему электродвигателя, цепи зубчатых передач привода и концевого эффектора), для двухходового механизированного хирургического отрезного и фиксирующего аппарата. То есть, усилие, прилагаемое пользователем при отведении назад рычага 20 прошивки, может добавляться к усилию, оказываемому электродвигателем 65 благодаря включению рычага 20 прошивки (прямо или косвенно) в цепь зубчатых передач привода между электродвигателем 65 и главным ведущим валом 48. В других вариантах осуществления настоящего изобретения пользователь может быть снабжен тактильной обратной связью по положению ножа 32 в концевом эффекторе, но без включения рычага 20 прошивки в цепь зубчатых передач привода. На фигурах 37-40 изображен механизированный хирургический отрезной и фиксирующий аппарат 10 с такого рода системой тактильной обратной связи по положению.
В вариантах осуществления, изображенных на фигурах 37-40, рычаг 20 прошивки может иметь нижний участок 228 и верхний участок 230 аналогично аппарату 10, показанному на фигурах 32-36. Однако, в отличие от варианта осуществления на фигурах 32-36, верхний участок 230 не содержит зубчатый участок, который сопрягается с частью цепи зубчатых передач привода. Вместо этого аппарат 10 содержит второй электродвигатель 265 с ввинченным в него резьбовым стержнем 266. Резьбовой стержень 266 возвратно-поступательно перемещается в продольном направлении внутрь и из электродвигателя 265, когда электродвигатель 265 вращается, в зависимости от направления вращения. Аппарат 10 содержит также кодовый датчик 268, который воспринимает обороты, совершаемые главным ведущим валом 48, для преобразования нарастающего углового перемещения главного ведущего вала 48 (или другого компонента главного ведущего узла), например, в соответствующую последовательность цифровых сигналов. В представленном варианте осуществления ведущая шестерня 124 содержит проксимальный ведущий вал 270, который соединяется с кодовым датчиком 268.
Аппарат 10 содержит также схему управления (не показанную), которая может быть реализована с использованием микроконтроллера или интегральной схемы какого-либо другого типа и которая получает цифровые сигналы от кодового датчика 268. По сигналам от кодового датчика 268 схема управления может вычислять стадию срабатывания ножа 32 в концевом эффекторе 12. То есть, схема управления может вычислять, полностью ли отработал, полностью ли отведен нож 32, или находится на промежуточной стадии. На основе вычисления стадии срабатывания концевого эффектора 12 схема управления может выдавать сигнал во второй электродвигатель 265 для управления его вращением, чтобы тем самым управлять возвратно-поступательным перемещением резьбового стержня 266.
Во время работы, как показано на фигуре 37, когда замыкающий рычаг 18 не зафиксирован в положении зажима, рычаг 20 прошивки повернут от участка 26 ручки пистолетного типа рукоятки 6 настолько, что передняя поверхность 242 верхнего участка 230 рычага 20 прошивки не находится в контакте с проксимальным концом резьбового стержня 266. Когда оперирующий хирург отводит назад замыкающий стержень 18 и фиксирует его в положении зажима, рычаг 20 прошивки немного поворачивается к замыкающему рычагу 18, так что оперирующий хирург может захватить рычаг 20 прошивки, как показано на фигуре 38. В данном положении передняя поверхность 242 верхнего участка 230 контактирует с проксимальным концом резьбового стержня 266.
Когда пользователь отводит назад рычаг 20 прошивки, то после его поворота на первоначальный угол (например, на 5 градусов) датчик 110 включения электродвигателя может включаться, так что, как изложено выше, датчик 110 посылает сигнал в электродвигатель 65 для вызова его переднего вращения с частотой, пропорциональной величине усилия отведения назад, прилагаемого оперирующим хирургом к рычагу 20 прошивки. Переднее вращение электродвигателя 65 приводит через цепь зубчатых передач привода во вращение главный ведущий вал 48, что вынуждает нож 32 и скользящий блок 33 двигаться по желобу 22 и отрезать ткань, зажатую в концевом эффекторе 12. Схема управления получает от кодового датчика 268 выходные сигналы об увеличении числа оборотов, совершенных узлом главного ведущего вала, и посылает сигнал во второй электродвигатель 265, чтобы вызвать вращение второго электродвигателя 265, что, в свою очередь, приводит к отведению резьбового стержня 266 внутрь электродвигателя 265. Это позволяет верхнему участку 230 рычага 20 прошивки поворачиваться против часовой стрелки, что дает возможность нижнему участку 228 рычага прошивки также поворачиваться против часовой стрелки. При этом, так как возвратно-поступательное перемещение резьбового стержня 266 зависит от числа оборотов, совершенных узлом главного ведущего вала, хирург, оперирующий аппаратом 10, воспринимает при захвате рычага 20 прошивки тактильную обратную связь по положению концевого эффектора 12. Однако усилие отведения назад, прилагаемое оперирующим хирургом, не влияет непосредственно на приведение в движение узла главного ведущего вала, так как рычаг 20 прошивки не включен в цепь зубчатых передач привода в данном варианте осуществления.
Благодаря отслеживанию увеличения числа оборотов, совершенных узлом главного ведущего вала, по выходным сигналам кодового датчика 268, схема управления может вычислить, когда происходит полное срабатывание ножа 32 (т.е. полное выдвижение). В этот момент схема управления может выдать в электродвигатель 65 сигнал на реверсирование направления для отведения ножа 32. Реверсное направление вращения электродвигателя 65 приводит к вращению узла главного ведущего вала в обратном направлении, что также определяется кодовым датчиком 268. По реверсному вращению, определяемому кодовым датчиком 268, схема управления посылает сигнал во второй электродвигатель 265 для вызова его вращения в обратном направлении, чтобы резьбовой стержень 266 начал продольное выдвижение из электродвигателя 265. Данное движение вынуждает верхний участок 230 рычага 20 прошивки поворачиваться по часовой стрелке, что приводит к повороту по часовой стрелке нижнего участка 228. При этом оперирующий хирург может ощущать усилие, развиваемое по часовой стрелке рычагом 20 прошивки, что обеспечивает пользователя обратной связью по положению отведения ножа 32 в концевом эффекторе 12. Схема управления может определять момент, когда нож 32 полностью отведен. В этот момент схема управления может выдать в электродвигатель 65 сигнал на останов вращения.
В соответствии с другими вариантами осуществления, вместо схемы управления для определения положения ножа 32 можно применить вышеописанные датчики реверса электродвигателя и останова электродвигателя. Кроме того, вместо применения пропорционального датчика 110 для управления вращением электродвигателя 65 можно воспользоваться двухпозиционным переключателем или датчиком. В таком варианте осуществления оперирующий хирург не располагал бы возможностью управления частотой вращения электродвигателя 65. Точнее, электродвигатель вращался бы с заданной частотой.
На фигуре 43 изображены различные варианты осуществления хирургического аппарата 300. Хирургический аппарат 300 может быть сходным с вышеописанным хирургическим аппаратом 10, но содержит также модуль 302 состояния, соединенный с возможностью разъема с данным аппаратом. Хотя на фигуре 43 модуль 302 состояния изображен присоединенным к внешней нижней боковине 60 рукоятки 6, следует понимать, что модуль 302 состояния может быть подсоединен к хирургическому аппарату 300 в любом подходящем месте. В соответствии с различными вариантами осуществления, рукоятка 6 хирургического аппарата 300 образует нишу, конструктивно выполненную с возможностью вмещения модуля 302 состояния.
Хирургический аппарат 300 содержит множество датчиков 304 (схематически показанных на фигуре 44), при этом множество датчиков 304 содержит, например, датчик угла шарнирного поворота, датчик положения упора, датчик кассеты, датчик замыкающего рычага, датчик смыкающего усилия, датчик усилия прошивки/отрезания, датчик положения ножа, датчик состояния блокировки или любую комбинацию упомянутых датчиков. Каждый датчик 304 может быть электрически связан с другим контактом 306 (схематически показанным на фигуре 44), расположенным вблизи внешней поверхности хирургического аппарата 300.
Датчики 304 могут быть реализованы любым подходящим способом. Например, датчик угла шарнирного поворота может быть реализован в виде, например, потенциометра, который составляет участок устройства 16 управления шарнирным поворотом и выдает сигнал, который показывает относительный угол шарнирного поворота концевого эффектора 12. Датчик положения упора может быть реализован в виде, например, датчика 2004 смыкания упора, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик кассеты может быть реализован в виде, например, датчика 2010 присутствия кассеты, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик замыкающего рычага может быть реализован в виде, например, датчика 2002 замыкающего рычага, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик смыкающего усилия может быть реализован в виде, например, датчика 2006 нагрузки смыкания упора, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик усилия прошивки/отрезания может быть реализован в виде, например, датчика 110 рычага прошивки, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик положения ножа может быть реализован в виде, например, датчика 2008 положения ножа, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities». Датчик состояния блокировки может быть реализован в виде, например, датчика 2010 блокировки по кассете, описанного в одновременно поданной заявке на патент США, «Surgical Instrument Having Recording Capabilities».
В соответствии с различными вариантами осуществления, модуль 302 состояния содержит корпус 308, конструктивно выполненный с возможностью разъемного соединения с хирургическим аппаратом 300. Модуль 302 состояния содержит множество контактов 310 (схематически показанных на фигуре 44), при этом каждый отдельный контакт 310 конструктивно выполнен с возможностью электрической связи с другим датчиком 304 хирургического аппарата 300, когда корпус 308 подсоединен к хирургическому аппарату 300. Например, когда модуль 302 состояния подсоединяют к хирургическому аппарату 300, каждый контакт 310 модуля 302 состояния может совмещаться с соответствующим согласованным контактом 306 хирургического аппарата 300, и тем самым каждый контакт 310 модуля 302 состояния электрически связывается с другим датчиком 304.
Модуль 302 состояния дополнительно содержит схему 312 (схематически показанную на фигуре 44), связанную с, по меньшей мере, одним из контактов 310, и множество индикаторов 314 (схематически показанных на фигуре 44). По меньшей мере, один из индикаторов 314 электрически связан со схемой 312. Схема 312 содержит управляющую схему и конструктивно выполнена с возможностью возбуждения, по меньшей мере, одного из индикаторов 314. В соответствии с различными вариантами осуществления, схема 312 может дополнительно содержать, как схематически показано на фигуре 44, переключатель 316, счетное устройство 318, передатчик 320 или любую их комбинацию.
Переключатель 316 электрически связан, по меньшей мере, с одним из индикаторов 314 и может применяться для выключения соответствующего индикатора 314, который электрическим связан с ним. В соответствии с различными вариантами осуществления, переключатель 316 может включать в себя участок модуля 302 состояния, отличающийся от схемы 312, или участок хирургического аппарата 300, отличающийся от модуля 302 состояния. В таких вариантах осуществления переключатель 316 может быть электрически связан со схемой 312.
Счетное устройство 318 может служить для определения числа действий прошивания/отрезания, числа остающихся действий прошивки/отрезания, времени ожидания после зажима и т.п. В соответствии с различными вариантами осуществления, счетное устройство 318 может включать в себя участок модуля 302 состояния, отличающийся от схемы 312. В соответствии с другими вариантами осуществления, счетное устройство 318 может включать в себя участок хирургического аппарата 300, отличающийся от модуля 302 состояния. В таких вариантах осуществления счетное устройство 318 может быть электрически связано со схемой 312.
Передатчик 320 можно применять для беспроводной передачи информации, снимаемой множеством датчиков 304, в беспроводной приемник (не показанный), связанный с монитором (не показанным), за которым может наблюдать пользователь хирургического аппарата 300 в то время, когда пользователь выполняет процедуру. Информация может передаваться беспроводными средствами непрерывно или периодически. Отображаемая информация может включать в себя, например, информацию о ходе прошивки/отрезания, информацию о нагрузке сжатия, информацию о нагрузке на нож, число действий прошивки/отрезания, время процедуры, время ожидания сжатия, степень зарядки батарейки и т.п. В соответствии с различными вариантами осуществления, передатчик 320 может включать в себя участок модуля 302 состояния, отличающийся от схемы 312, или участок хирургического аппарата 300, отличающийся от модуля 302 состояния. В таких вариантах осуществления передатчик 320 может быть электрически связан со схемой 312.
На фигурах 45-47 показаны различные варианты осуществления модуля 302 состояния. Как показано, модуль 302 состояния может содержать индикаторы 314 разных типов. В соответствии с различными вариантами осуществления, индикаторы 314 могут содержать, по меньшей мере, один визуальный индикатор, например светоизлучающий диод, цветной светоизлучающий диод, дисплей и т.п., или любое сочетание упомянутых устройств. Дисплей может содержать, например, буквенно-цифровой дисплей, точечный дисплей матричного типа, жидкокристаллический дисплей и т.п. В соответствии с различными вариантами осуществления, по меньшей мере, один из индикаторов 314 может содержать звуковой индикатор, например устройство вывода звукового сигнала. Устройство вывода звукового сигнала может быть реализовано, например, в виде громкоговорителя и может быть электрически связано с переключателем 316. В соответствии с различными вариантами осуществления, индикаторы 314 могут содержать, по меньшей мере, один визуальный индикатор и, по меньшей мере, один звуковой индикатор.
Во время работы индикаторы 314 могут обеспечивать пользователя хирургического аппарата 300 визуальной и звуковой обратной связью. Например, как показано на фигуре 45, индикатор 314 (например, светоизлучающий диод) может быть использован для указания, находится ли замыкающий рычаг 18 в фиксированном положении, закончился ли заданный период ожидания после зажима, заряжена ли кассета 34 для скобок и т.п. Разные индикаторы 314 могут испускать свет разного цвета. Как показано на фигурах 45 и 46, разная штриховка обозначает разные цвета. Индикатор 314 (например, цветной светоизлучающий диод) можно использовать для указания нескольких состояний конкретной функции хирургического аппарата 300. Например, для указания состояния кассеты 34 для скобок цветной светоизлучающий диод может испускать зеленый свет, если в желобе 22 находится заряженная кассета 34 для скобок, желтый свет, если в желобе 22 находится отработанная кассета 34 для скобок, или красный свет, если в желобе 22 нет кассеты 34 для скобок. Аналогично, для указания состояния режущего усилия, прилагаемого хирургическим аппаратом 300, цветной светоизлучающий диод может испускать зеленый свет, если оказываемое режущее усилие находится в нормальных пределах, желтый свет, если оказываемое режущее усилие находится в увеличенных пределах, или красный свет, если оказываемое режущее усилие находится в пределах высоких нагрузок. Следует понимать, что индикаторы 314 можно использовать для указания нескольких состояний других функций хирургического аппарата 300, например степени зарядки батарейки.
Как показано на фигуре 45, ряд индикаторов 314 (например, светоизлучающих диодов) можно использовать для указания хода ножа 32, процентную составляющую от максимального оказываемого смыкающего усилия, процентную составляющую от максимального оказываемого усилия прошивки/отрезания, текущий угол шарнирного поворота концевого эффектора 12 и т.п. Упомянутые показания могут снабдить пользователя хирургического аппарата 300 обратной связью по усилиям, развиваемым при применении хирургического аппарата 300 и обратной связью по тому, насколько хирургический аппарат 300 приближается во время работы к своим предельным возможностям. Хотя на фигуре 45 показан только один ряд индикаторов 314, следует понимать, что модуль 302 состояния может содержать любое число рядов индикаторов 314.
Как показано на фигуре 46, модуль 302 состояния может содержать индикаторы 314 (например, светоизлучающие диоды), расположенные с ориентацией в виде двух кругов. В таких вариантах осуществления модуль 302 состояния способен обеспечивать пользователю хирургического аппарата 300 одновременно больше информации, чем модуль 302 состояния, показанный на фигуре 45. Хотя на фигуре 46 показаны две круговые схемы расположения индикаторов, несложно понять, что модуль 302 состояния может содержать любое число индикаторов 314, расположенных с ориентацией по любым схемам. Например, модуль 302 состояния может содержать индикаторы 314, расположенные в виде пирамиды.
Как показано на фигуре 47, индикаторы 314 модуля 302 состояния могут содержать ряд светоизлучающих диодов и, по меньшей мере, один дисплей (например, жидкокристаллический дисплей). В таких вариантах осуществления модуль 302 состояния способен обеспечивать пользователю хирургического аппарата 300 одновременно больше информации, чем модуль 302 состояния, показанный на фигуре 45 или фигуре 46. Например, светоизлучающие диоды могут показывать силу реакции на упоре 24 и кассете 22 для скобок, степень зарядки батарейки, угол шарнирного поворота и т.п. в виде столбиковой диаграммы. Дисплей может показывать информацию, касающуюся смыкающих усилий, усилий прошивки/отрезания, числа остающихся действий прошивки/отрезания, времени ожидания после зажима, выполнения хода, угла шарнирного поворота и т.п. в цифровой форме.
Выше представлены описания нескольких вариантов осуществления изобретения, однако, очевидно, что специалистами в данной области техники могут быть созданы различные модификации, изменения и усовершенствования данных вариантов осуществления при достижении некоторых или всех преимуществ изобретения. Например, в соответствии с различными вариантами осуществления, один компонент можно заменить несколькими компонентами, и несколько компонентов можно заменить единственным компонентом для выполнения данной функции или функций. Поэтому настоящая заявка предполагает охват всех такого рода модификаций, изменений и усовершенствований без выхода за пределы объема и существа предлагаемого в описании изобретения, определяемых прилагаемой формулой изобретения.
Любые патент, публикация или другие приведенные в описании данные целиком или частично, которые упомянуты как включенные в настоящее описание путем отсылки, включены в настоящее описание только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании. По существу, в необходимых пределах сведения, приведенные в явном виде в настоящем описании, заменяют собой любые противоречащие данные, включенные в настоящее описание путем отсылки. Любые данные, или их часть, которые упомянуты как включенные в настоящее описание путем отсылки, но которые противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании, будут включаться только в таких пределах, в которых не возникает противоречия между упомянутыми включенными данными и существующими данными изобретения.
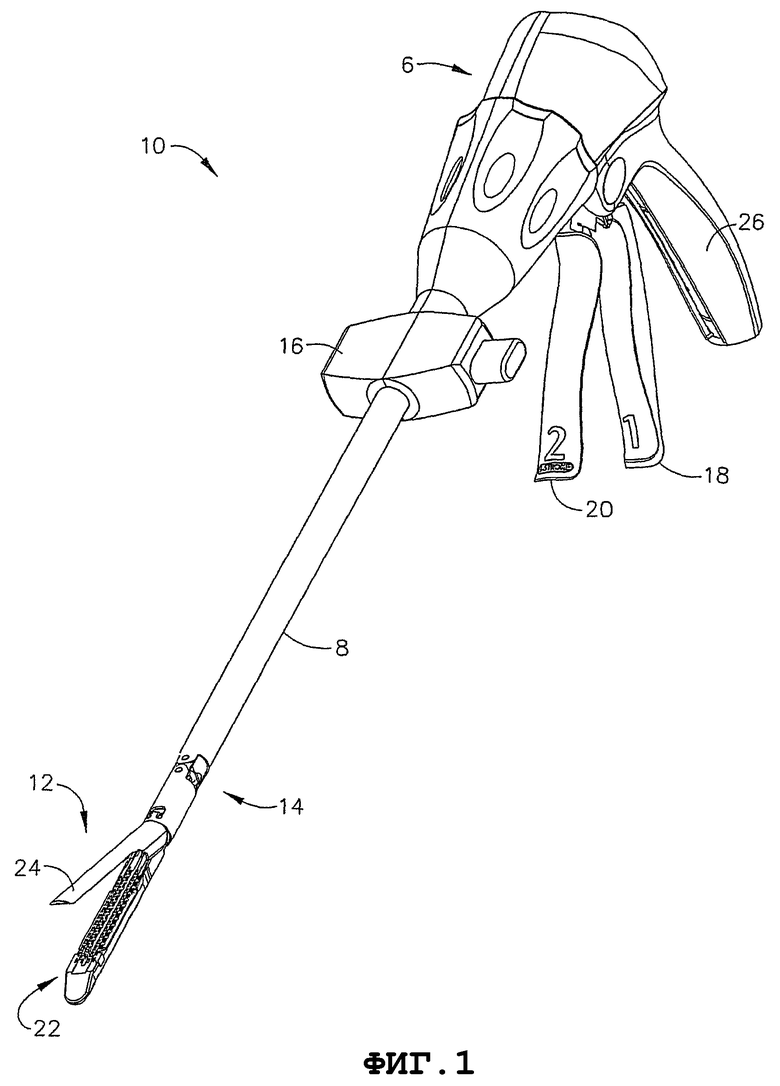
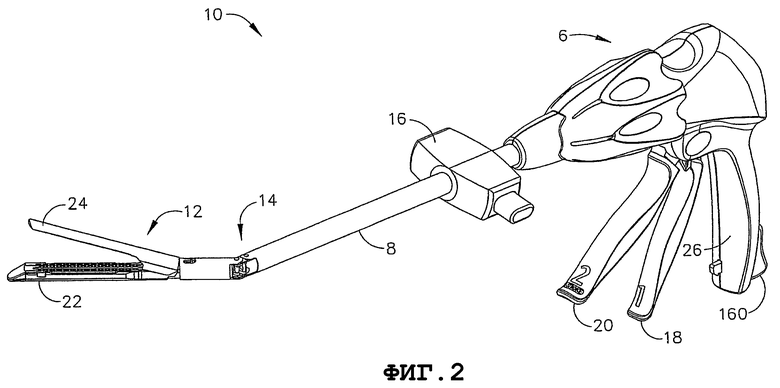
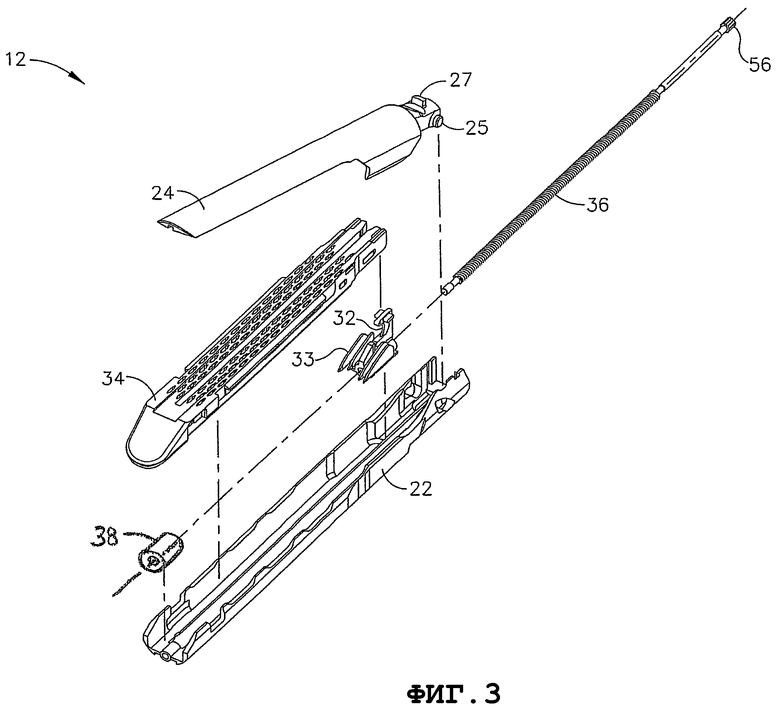
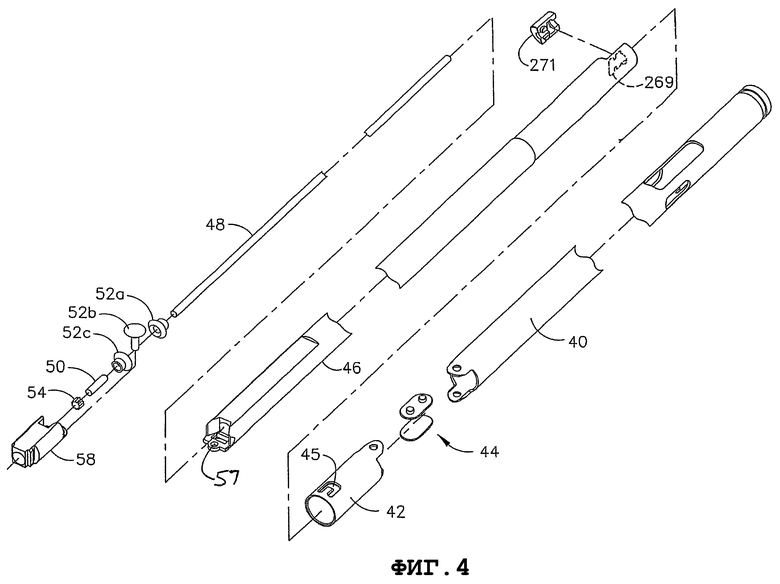
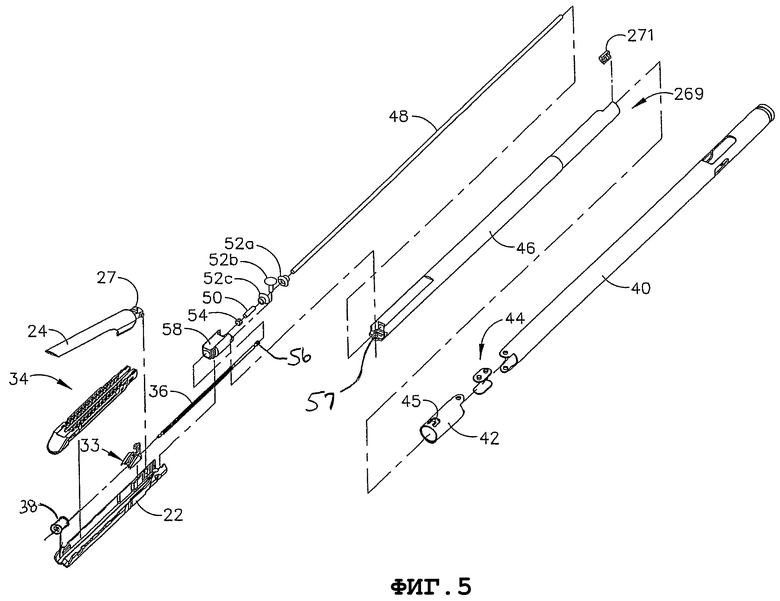
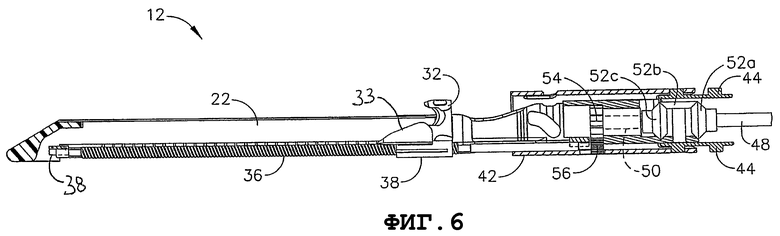
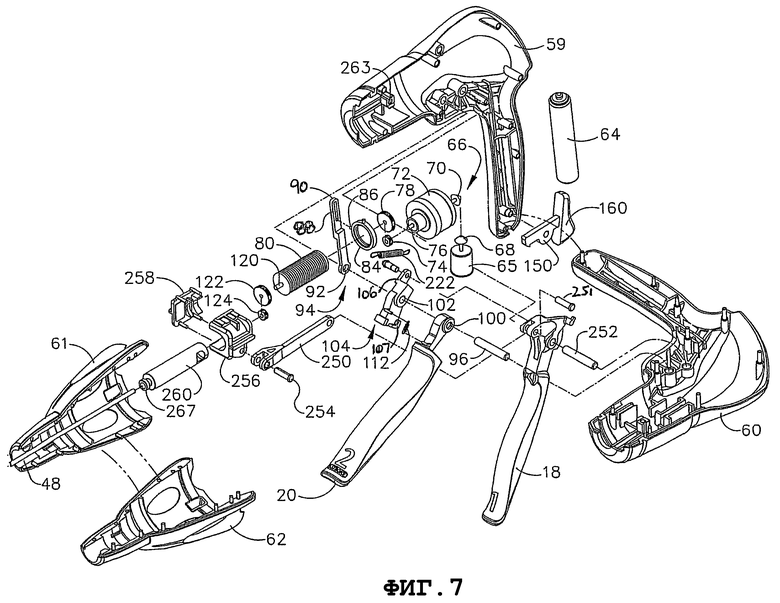
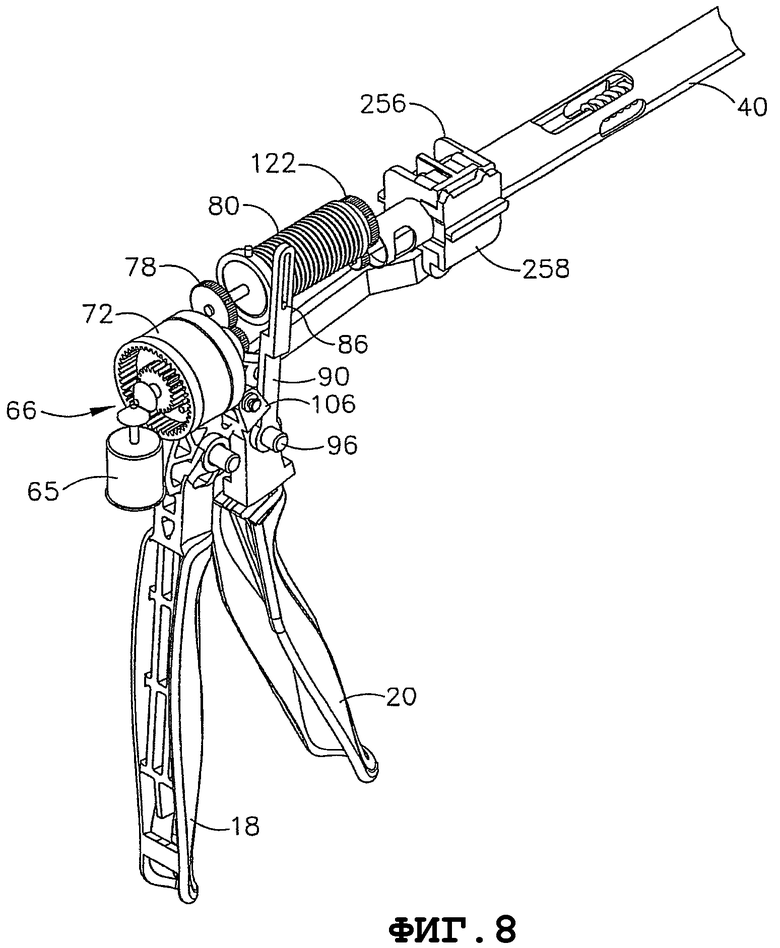
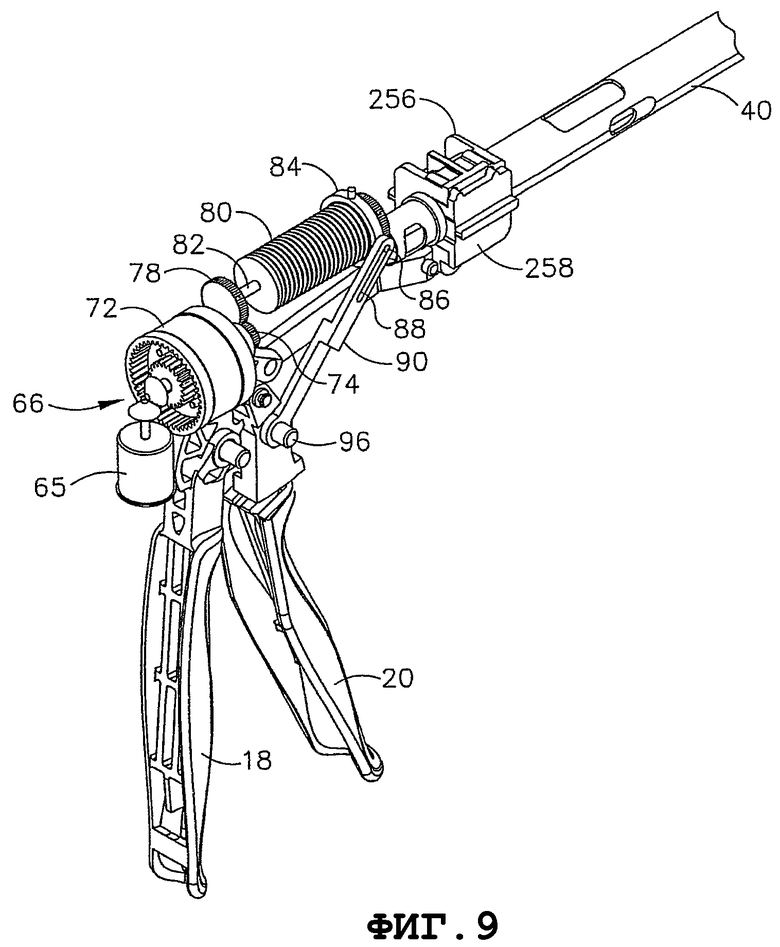
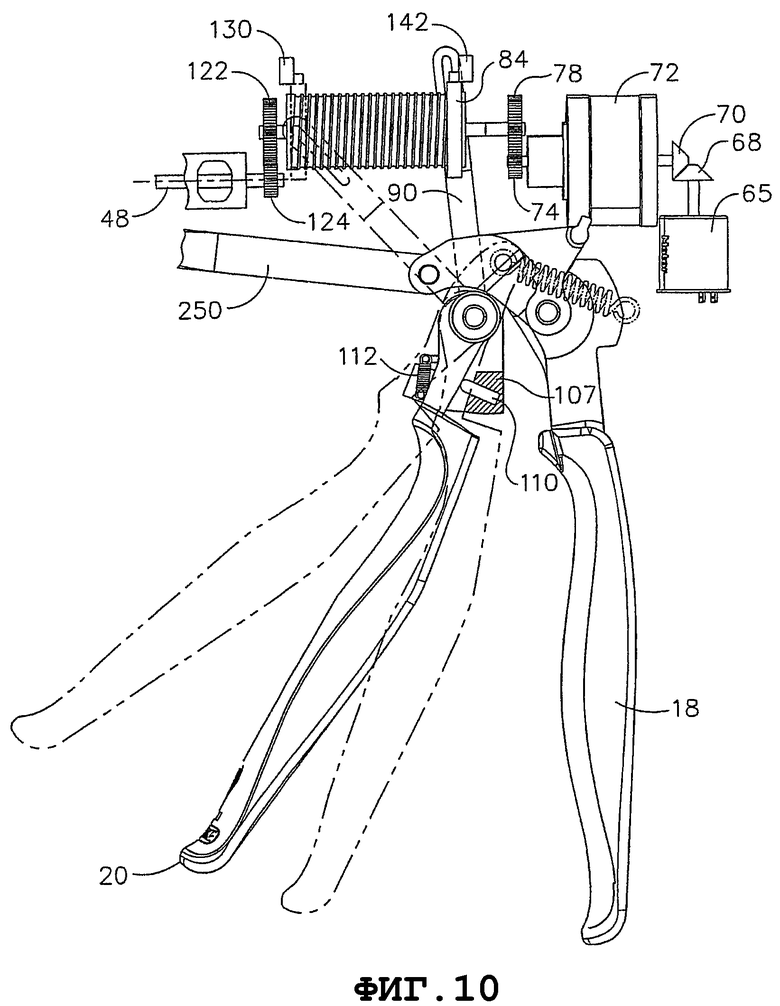
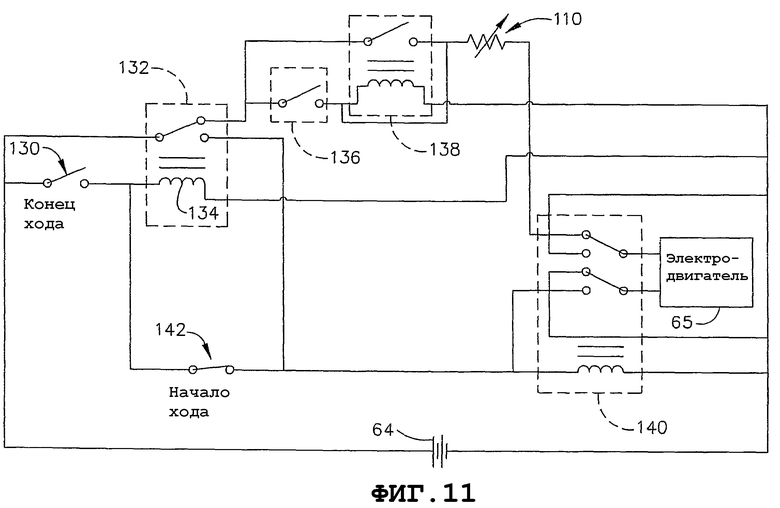
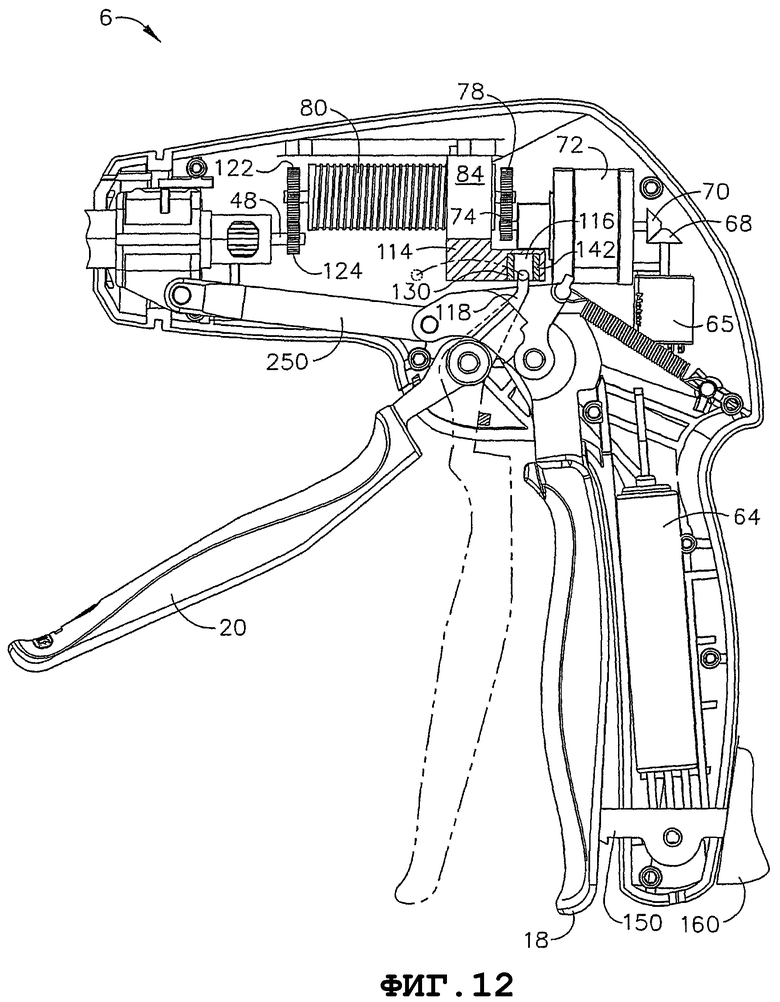
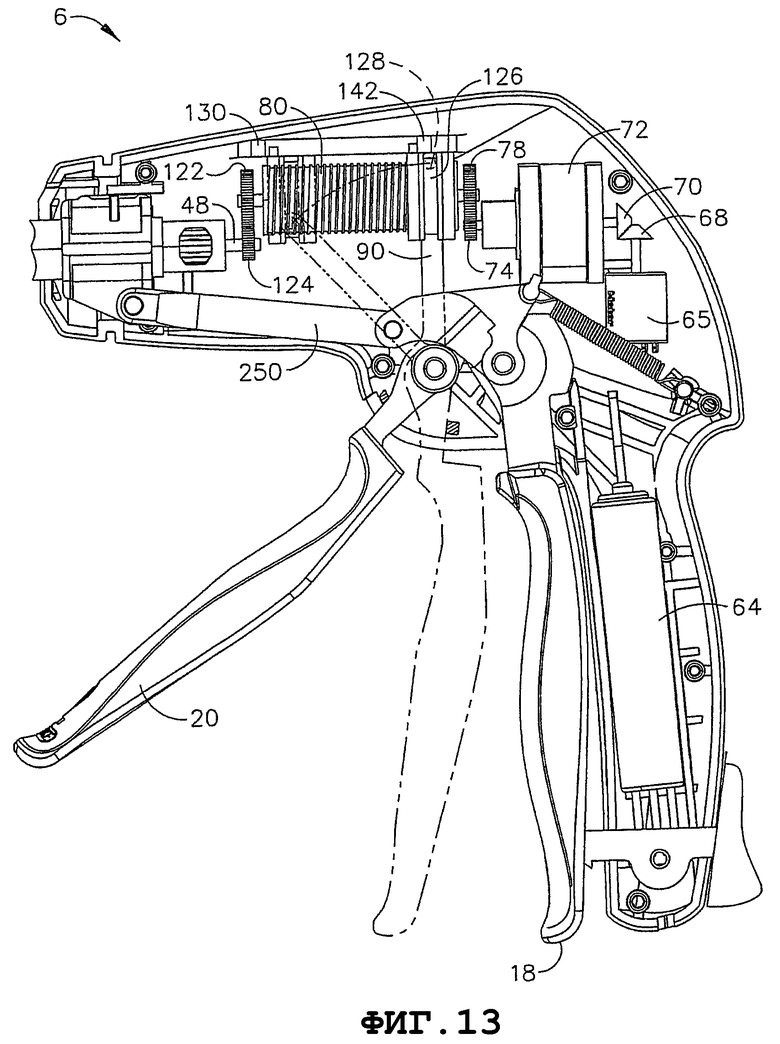
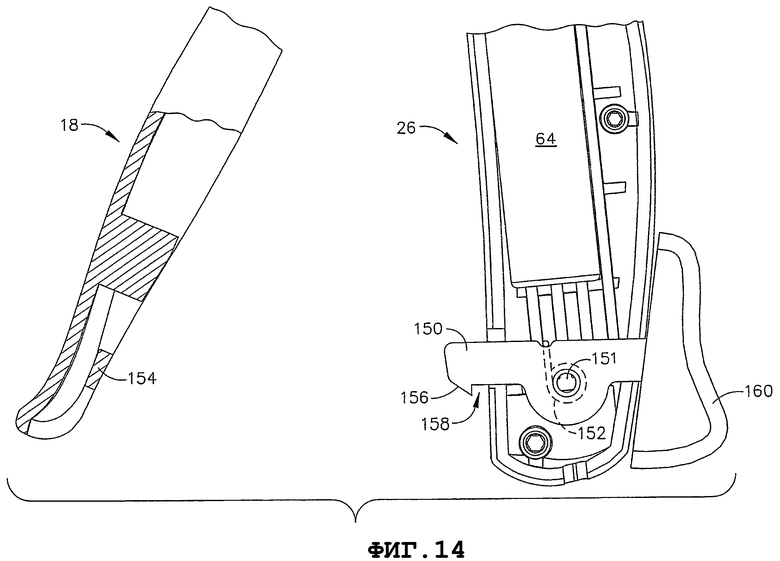
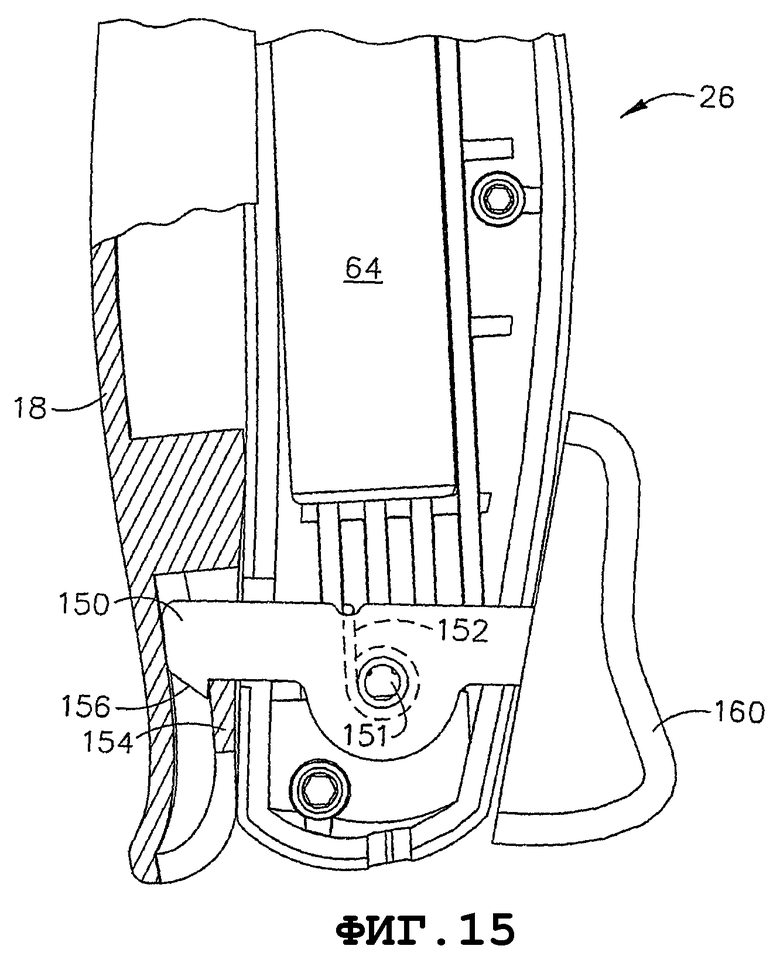
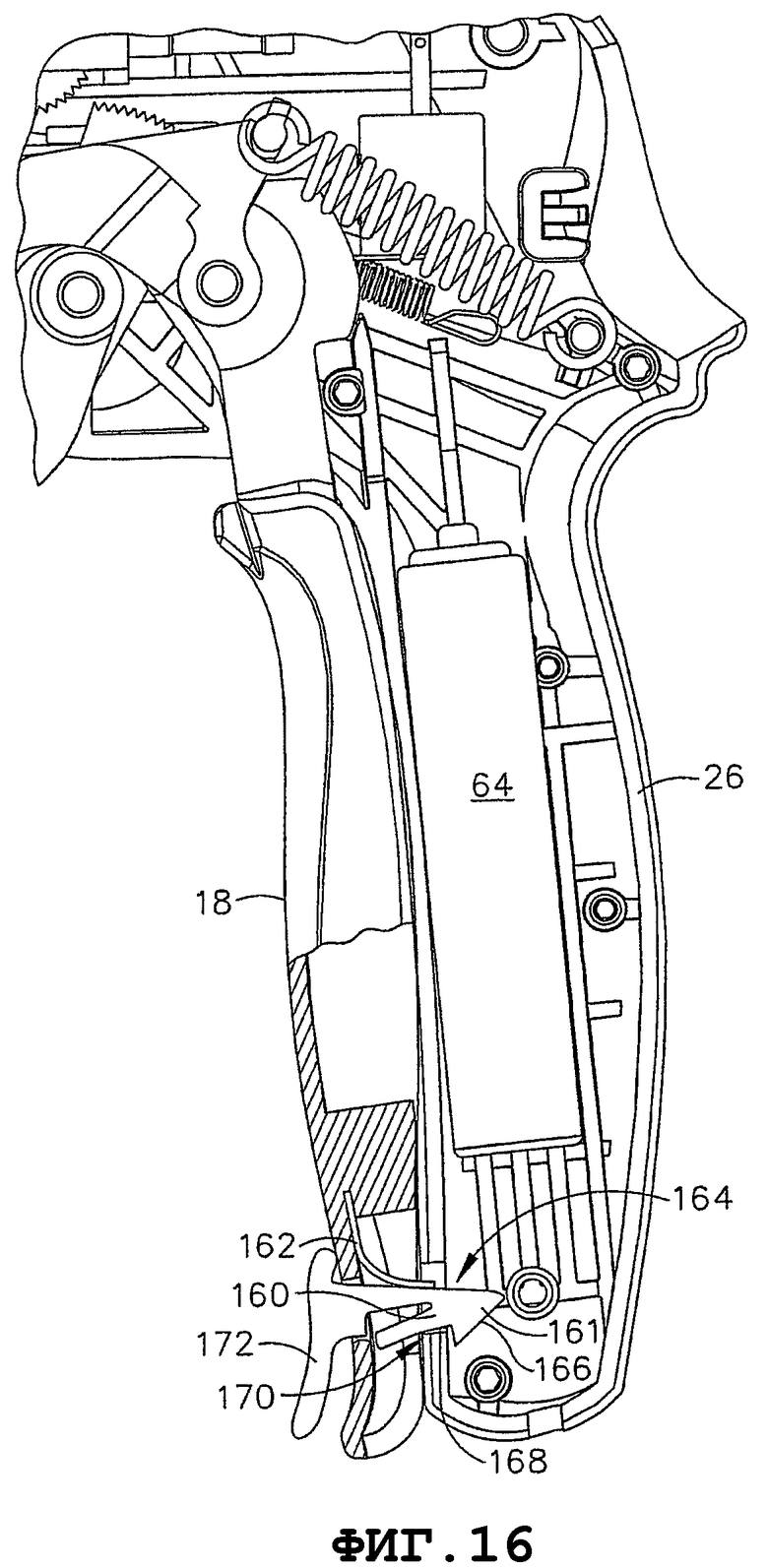
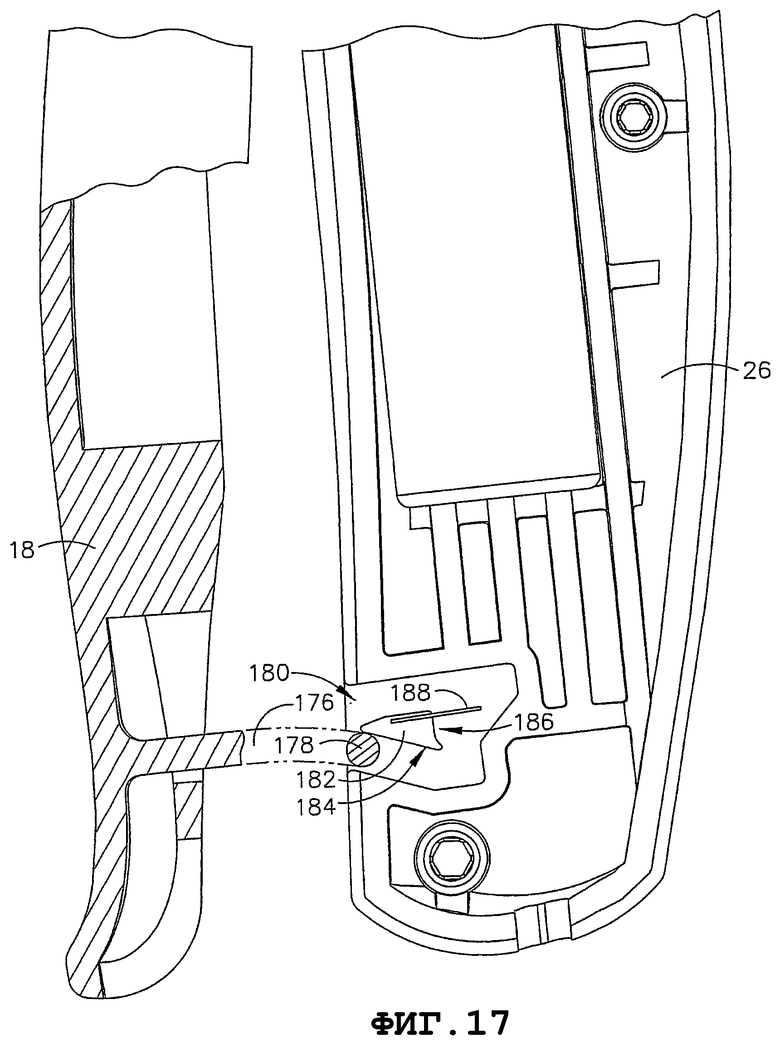
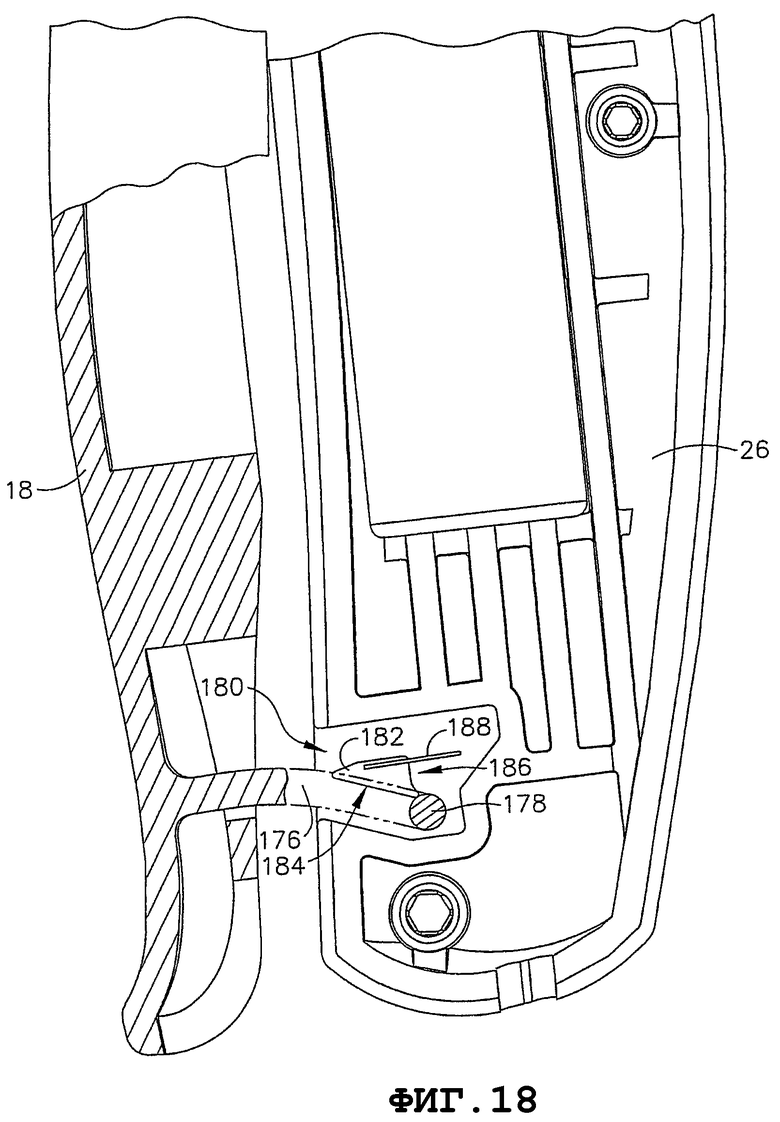
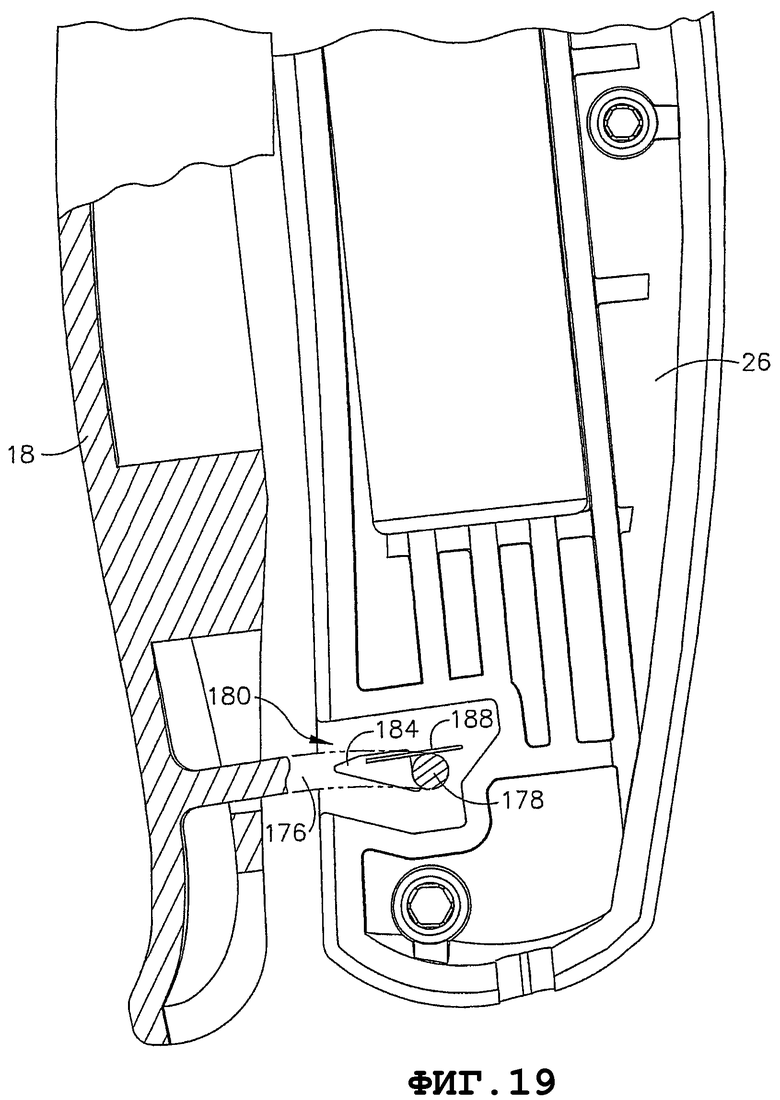
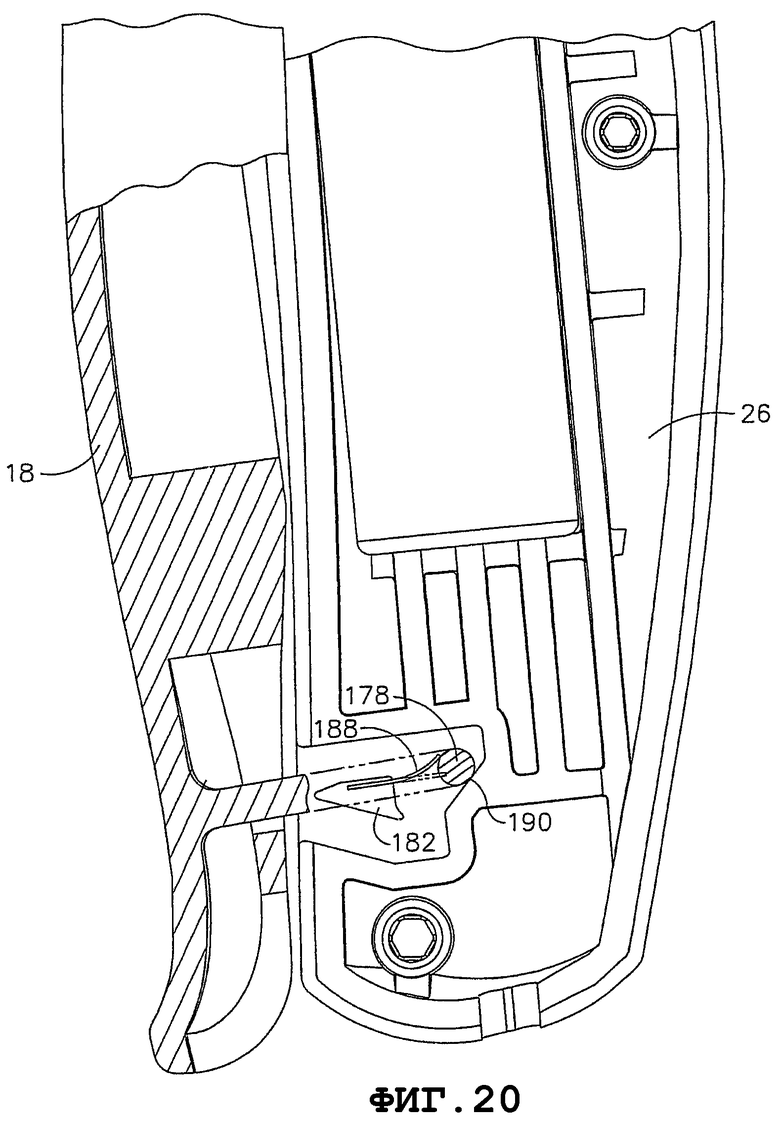


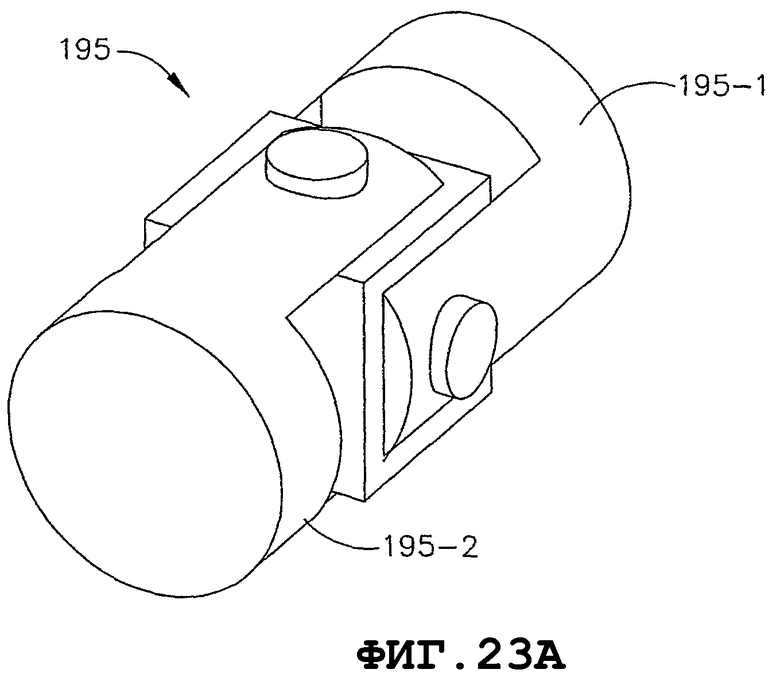
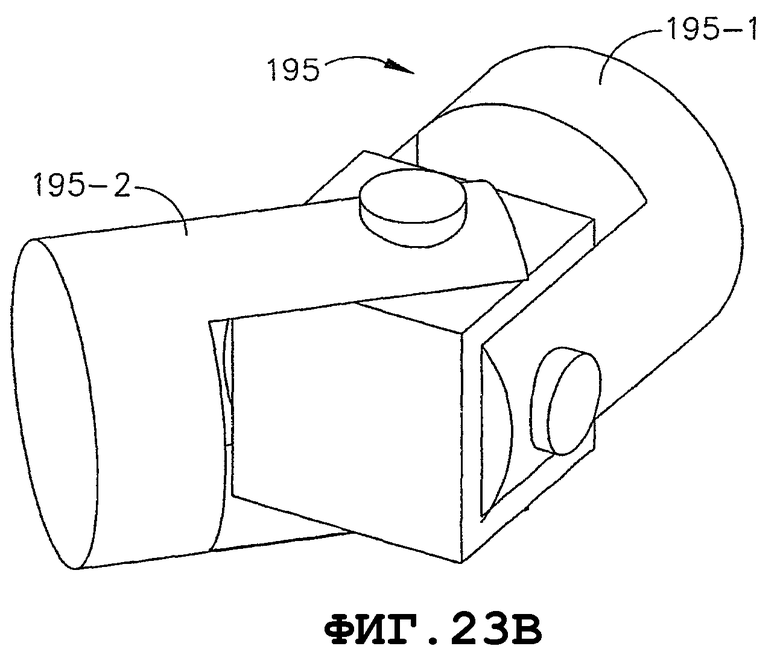
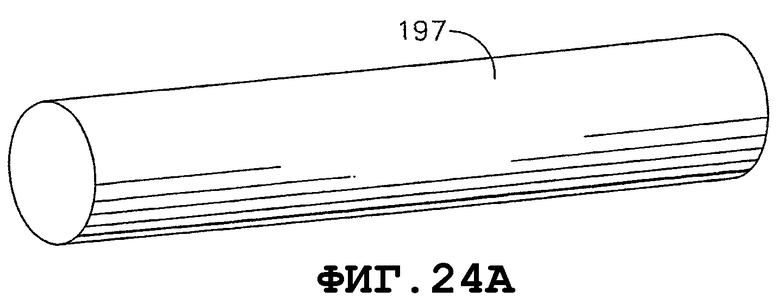
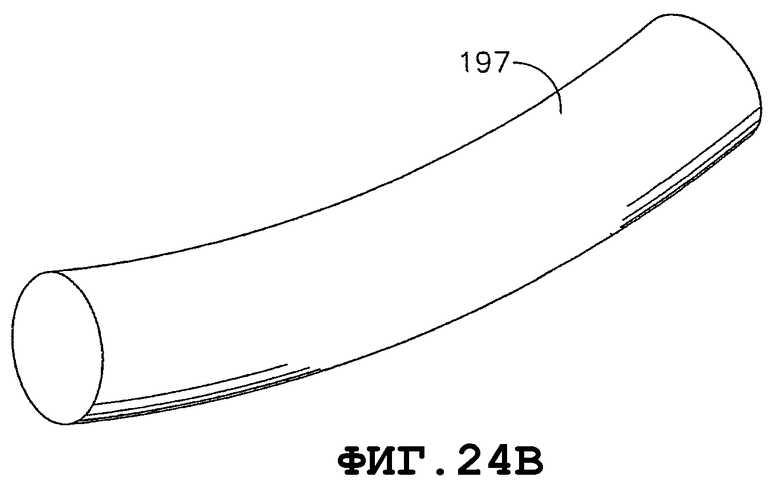
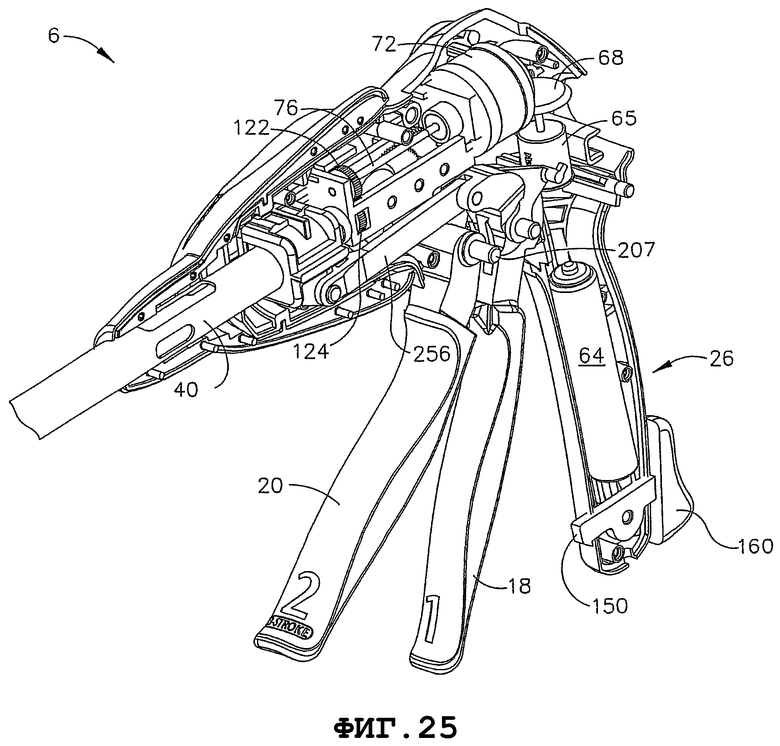
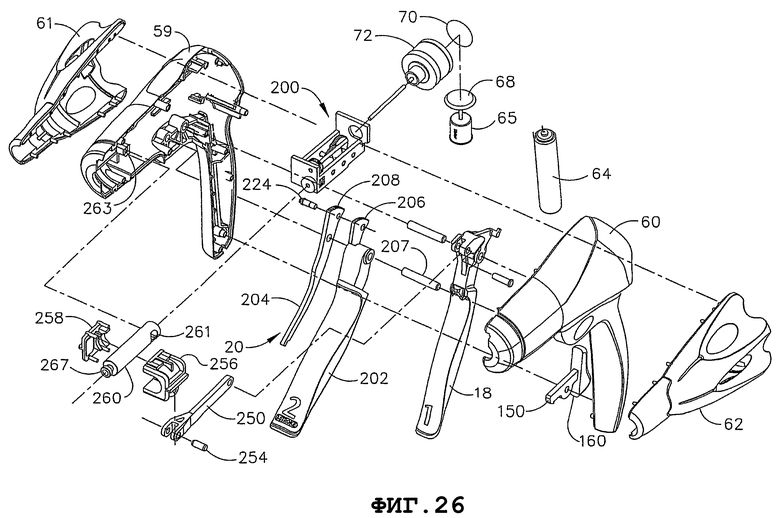
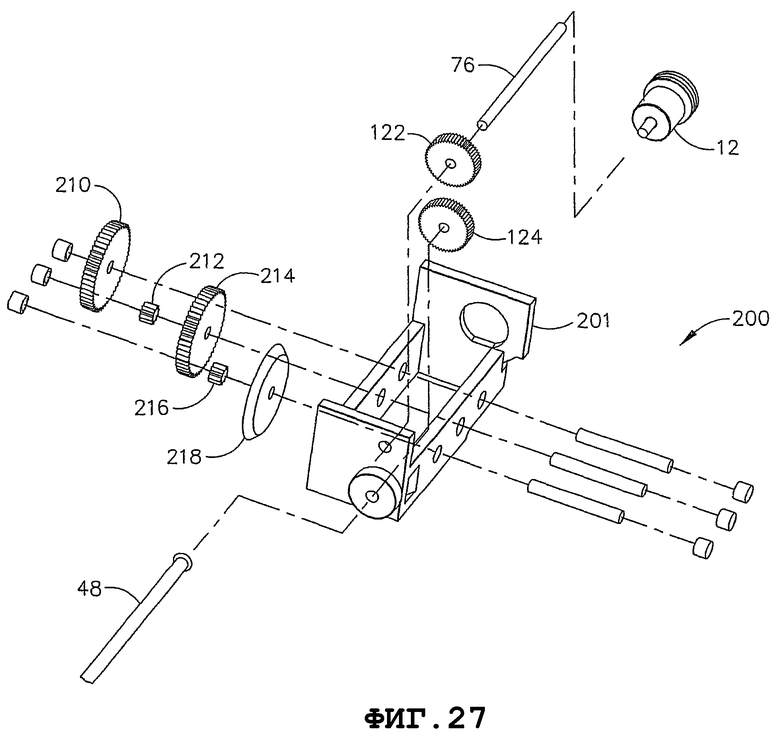
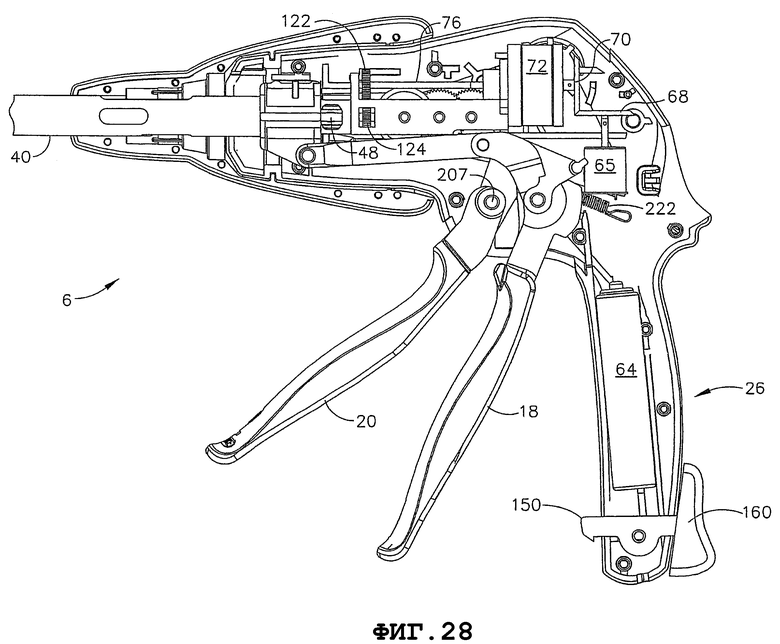
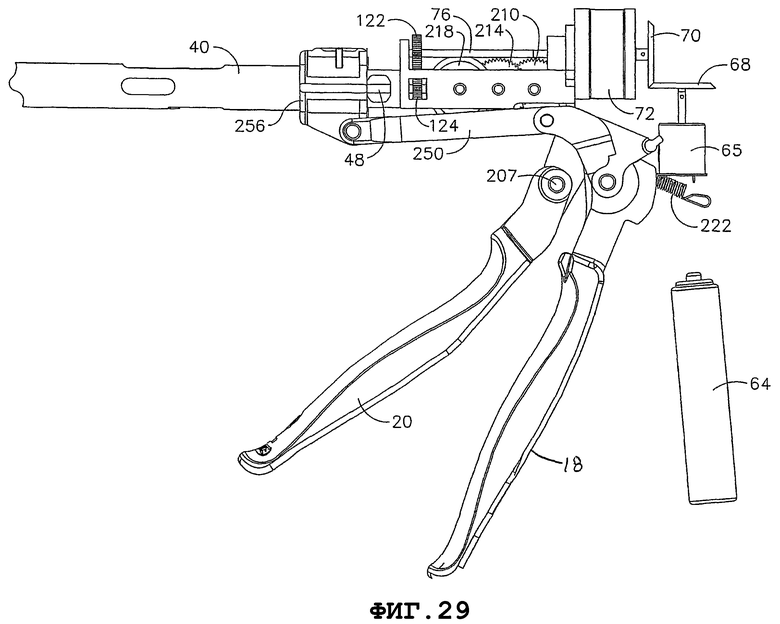
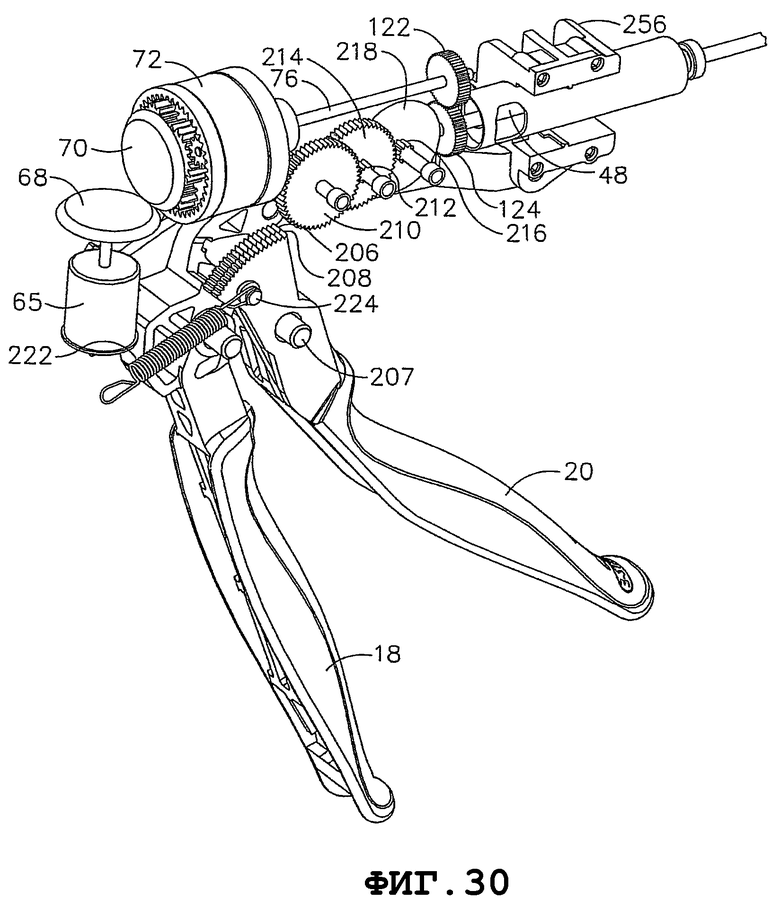
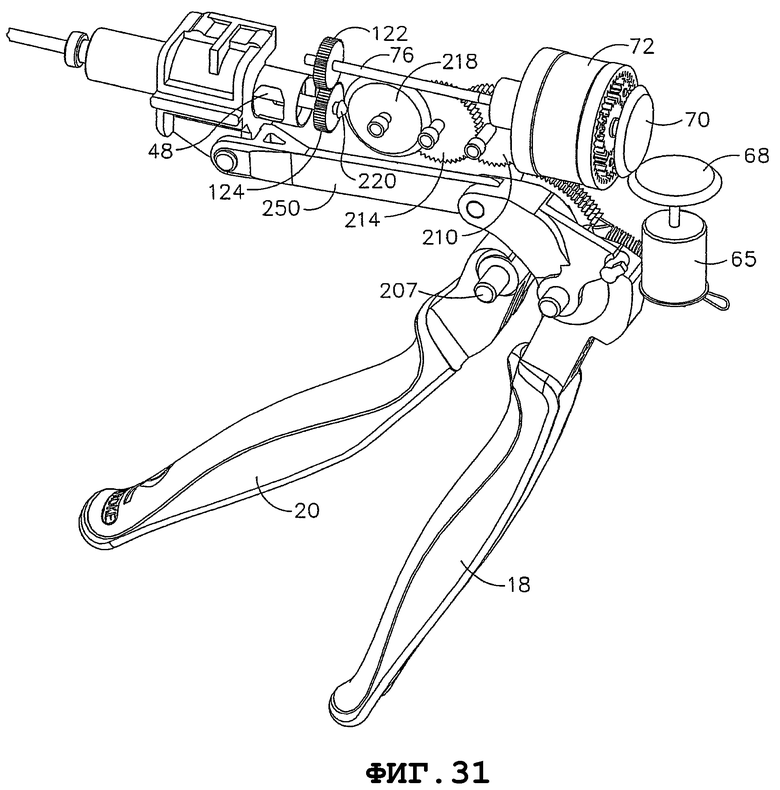
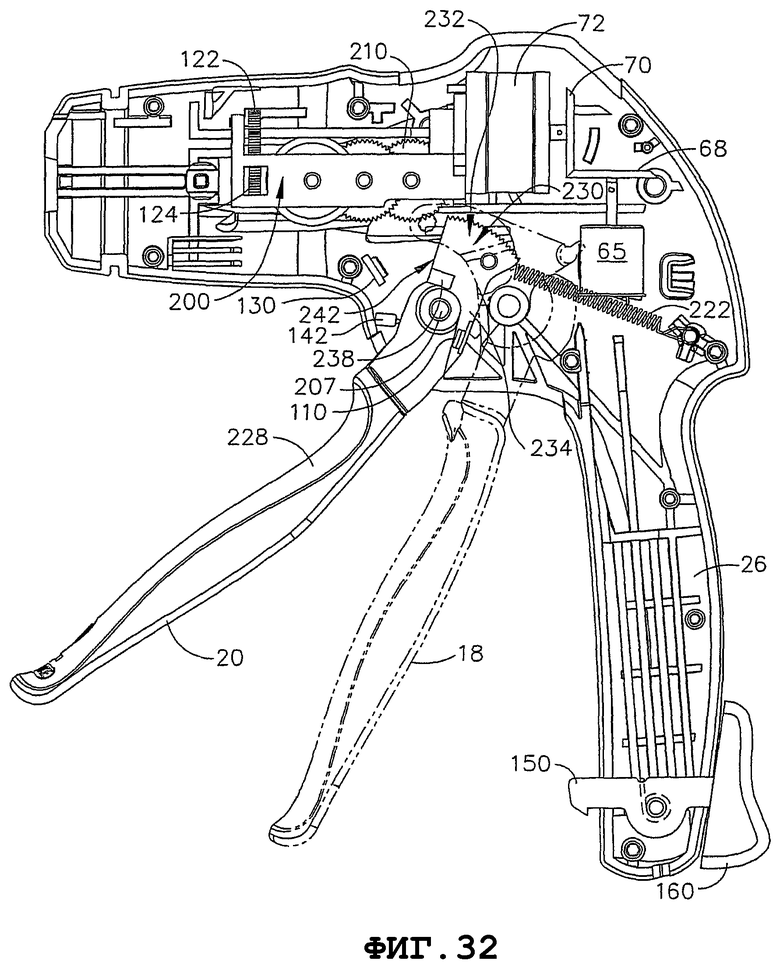
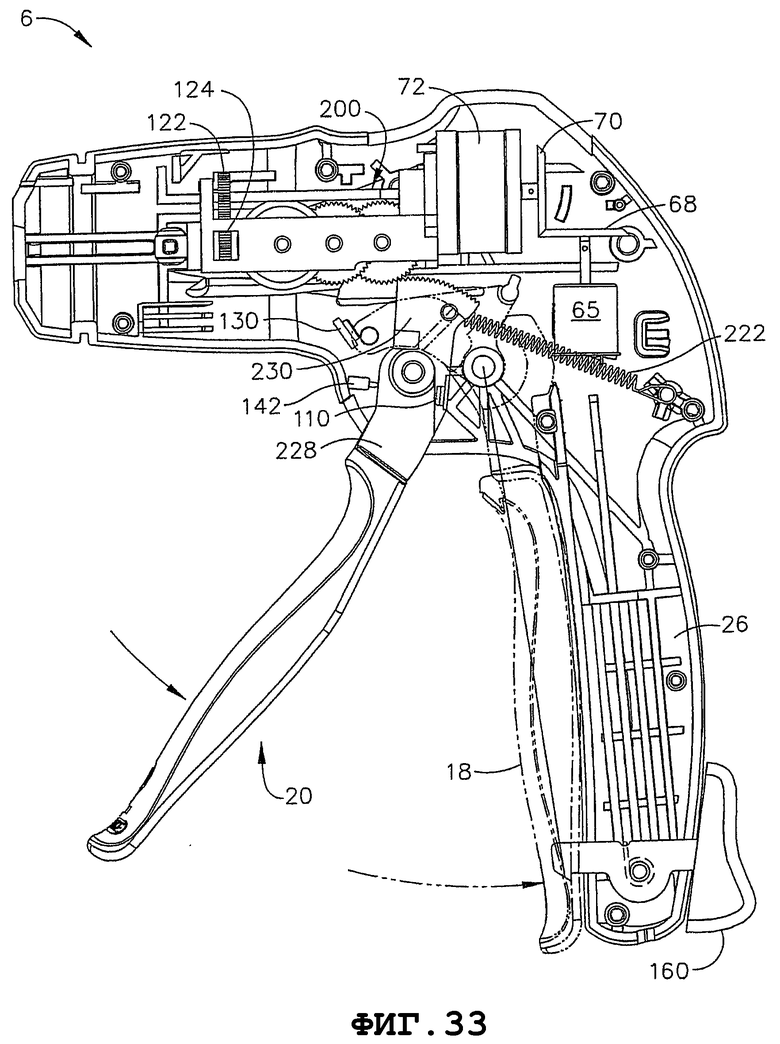
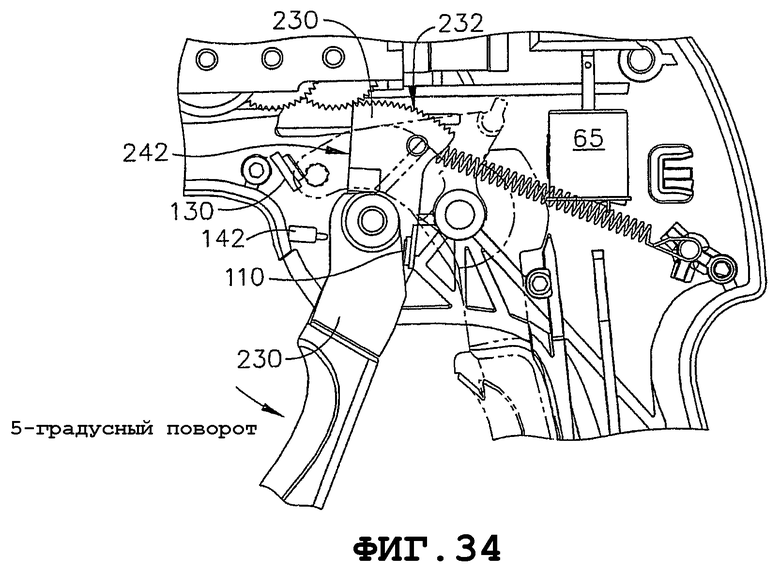
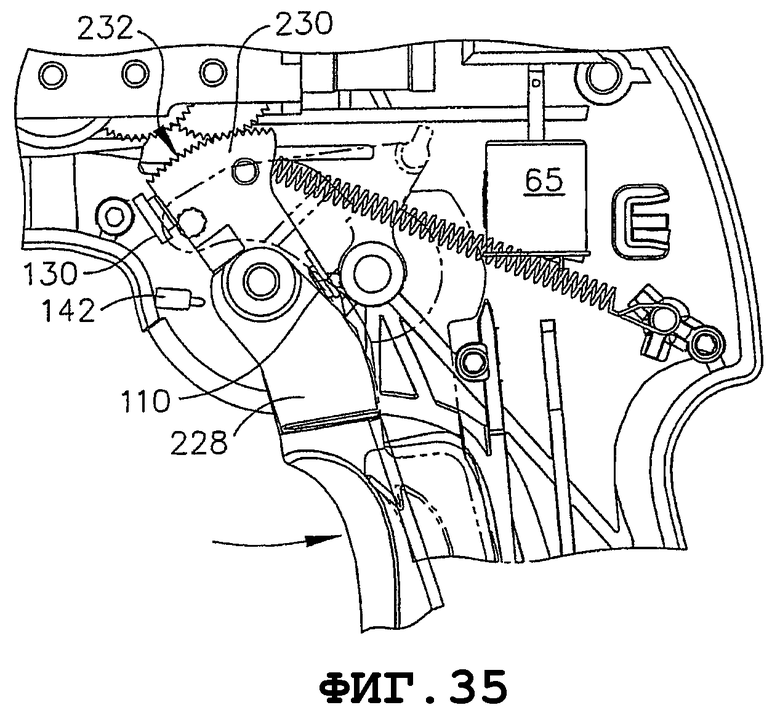
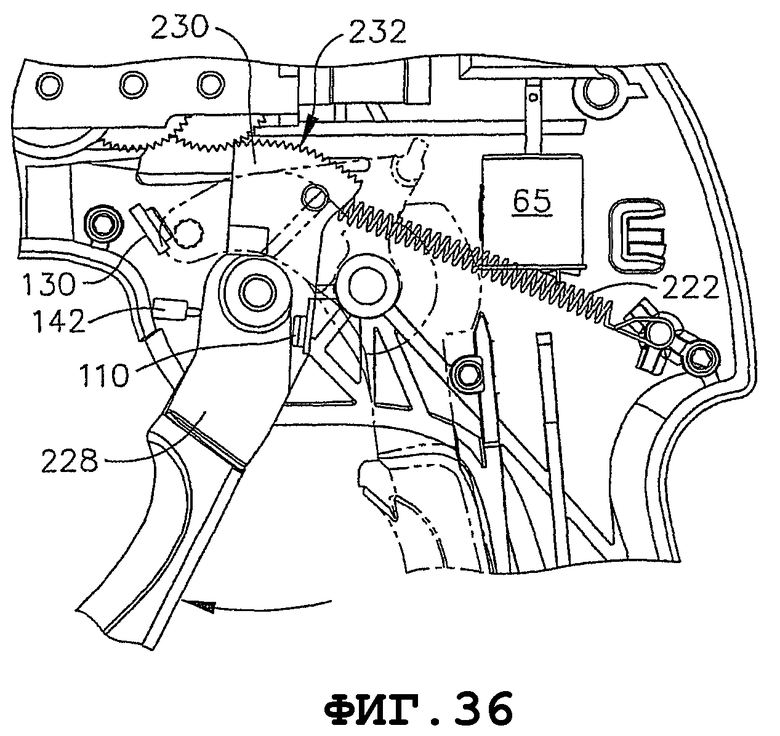
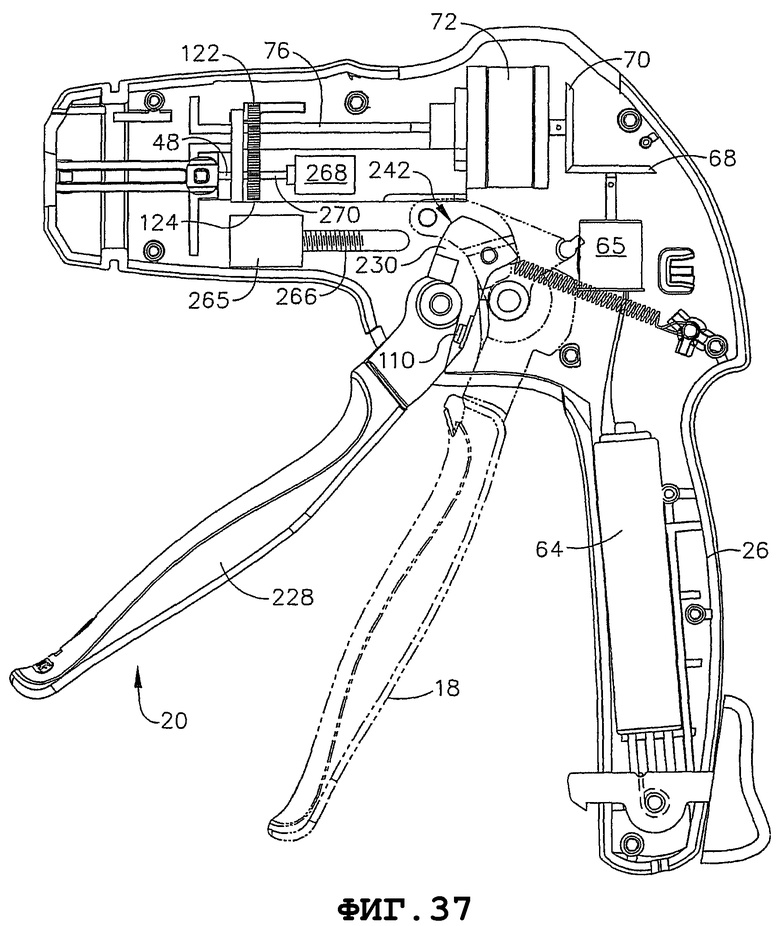
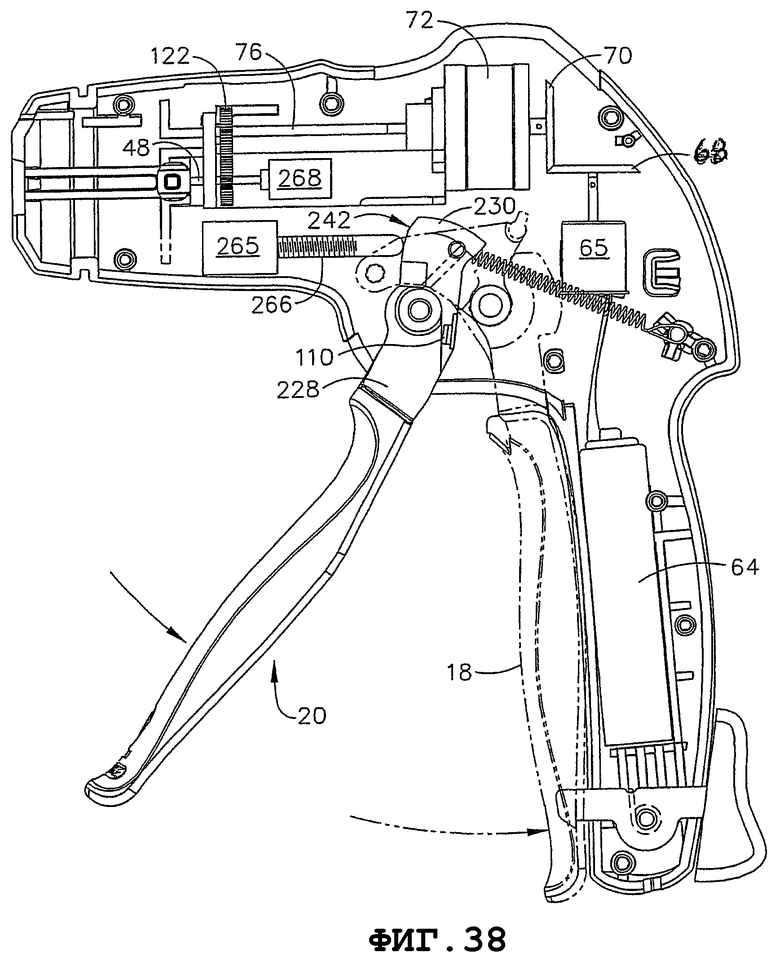
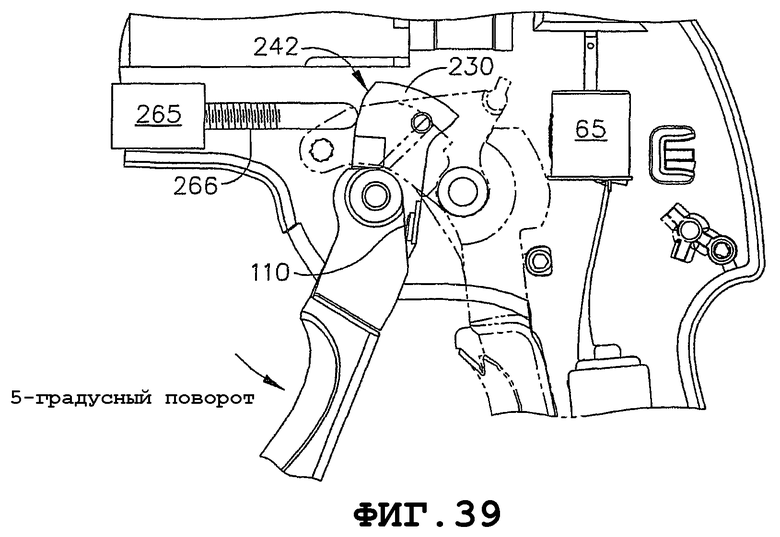
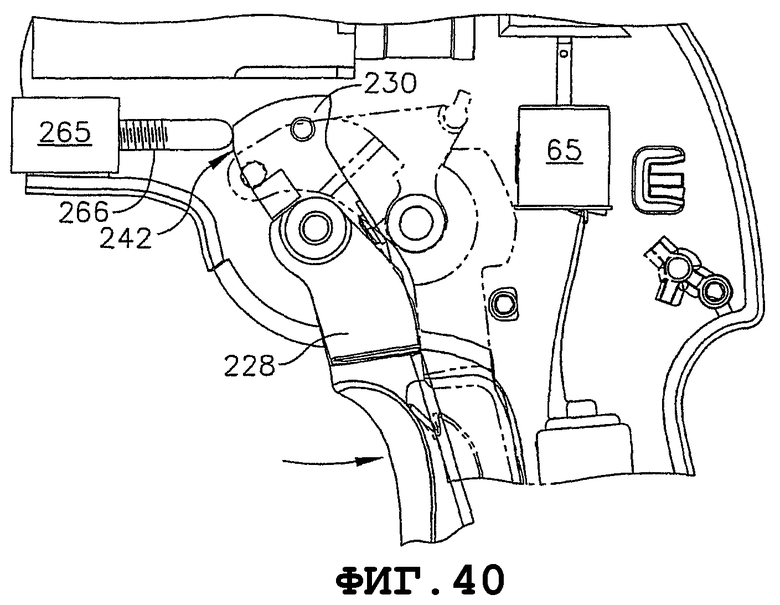
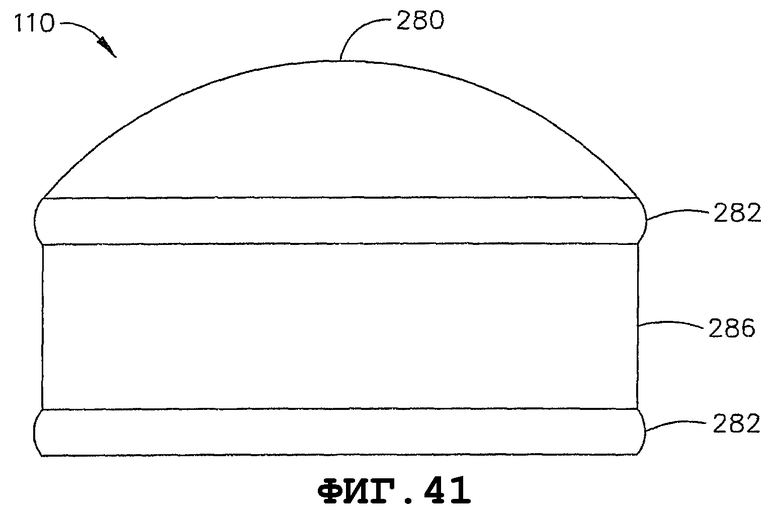
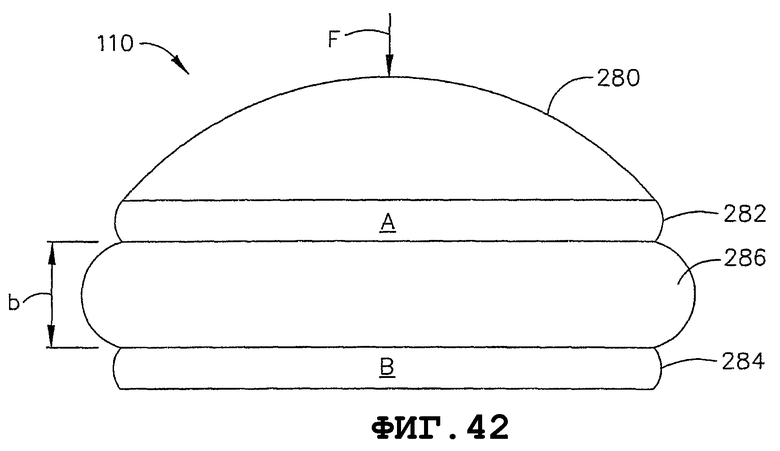
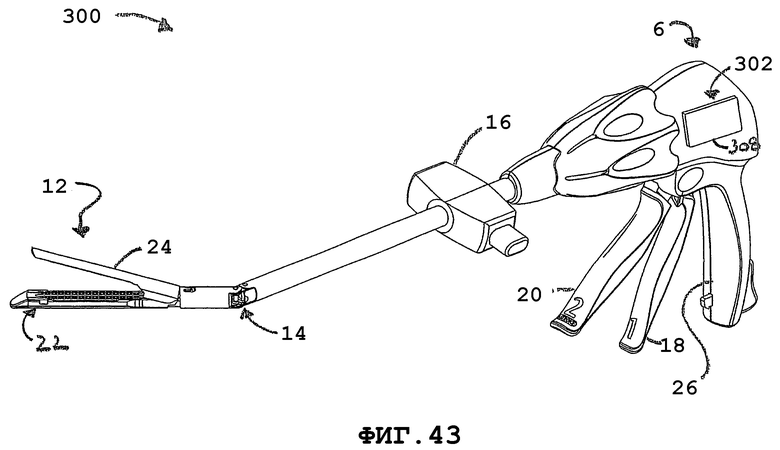
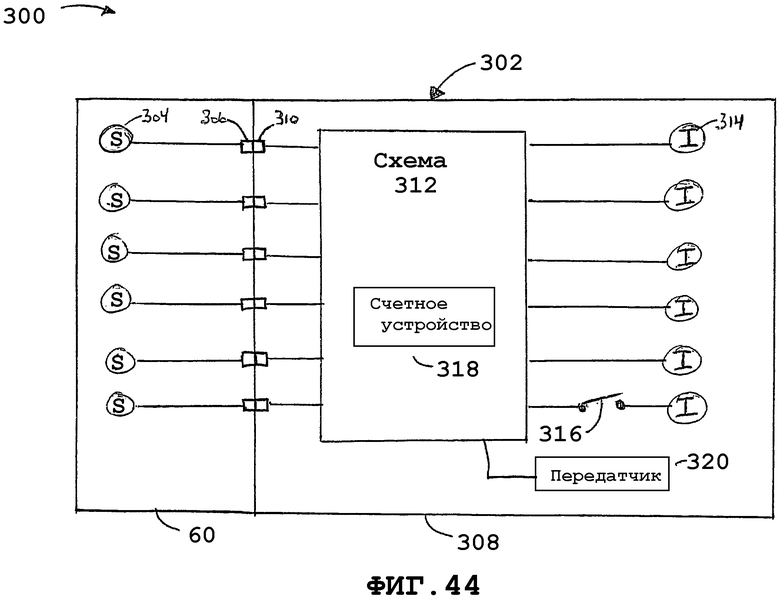
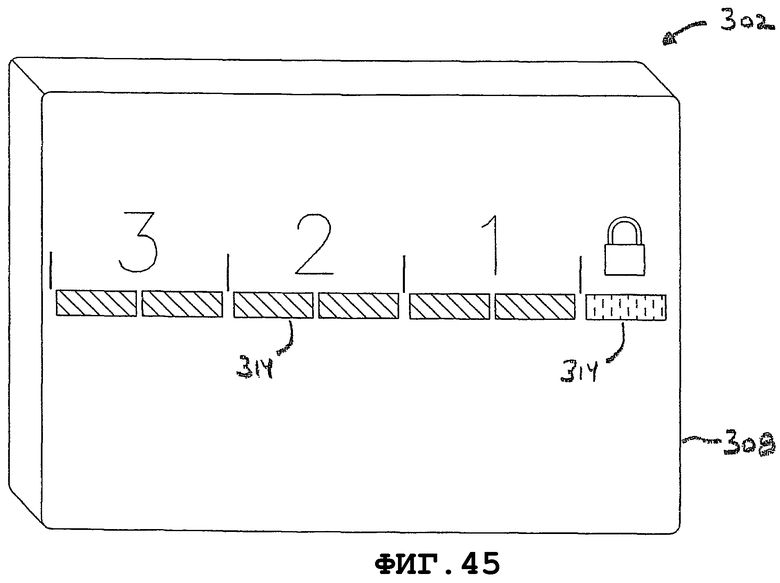
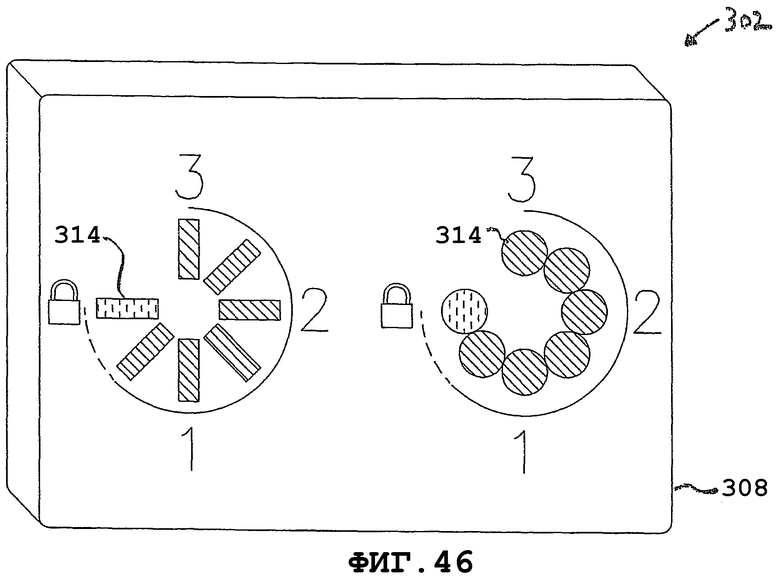
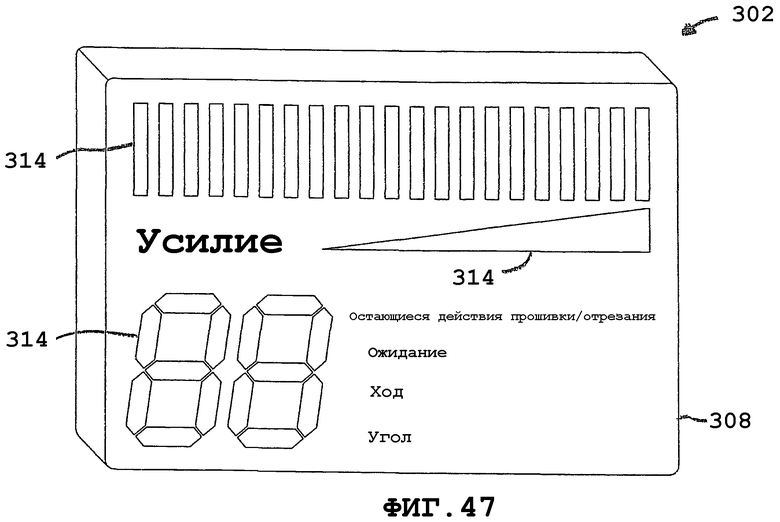
Группа изобретений относится к медицинской технике, а именно к хирургическим аппаратам и модулю состояния для применения с ними. Модуль состояния содержит корпус, множество контактов, схему, электрически связанную с, по меньшей мере, одним из контактов, множество индикаторов. При этом, по меньшей мере, один из индикаторов электрически связан со схемой. Каждый отдельный контакт множества контактов конструктивно выполнен с возможностью электрической связи с датчиком хирургического аппарата, когда корпус подсоединен к хирургическому аппарату. Корпус модуля состояния выполнен с возможностью разъемного соединения с хирургическим аппаратом. Модуль состояния выполнен с возможностью разъемного размещения в рукоятке хирургического аппарата. Хирургический аппарат содержит множество датчиков и модуль состояния, описанный выше. Использование группы изобретений позволит повысить эффективность и снизить риск повреждения хирургического аппарата за счет визуальной и/или звуковой индикации состояния аппарата. 2 н. и 18 з.п. ф-лы, 47 ил.
1. Модуль состояния для применения с хирургическим аппаратом, содержащим множество датчиков, при этом модуль состояния содержит корпус, конструктивно выполненный с возможностью разъемного соединения с хирургическим аппаратом;
множество контактов, при этом каждый отдельный контакт конструктивно выполнен с возможностью электрической связи с датчиком, когда корпус подсоединен к хирургическому аппарату;
схему, электрически связанную с, по меньшей мере, одним из контактов; и множество индикаторов, при этом, по меньшей мере, один из индикаторов электрически связан со схемой,
при этом модуль состояния выполнен с возможностью разъемного размещения в рукоятке хирургического аппарата.
2. Модуль состояния по п.1, в котором схема содержит управляющую схему.
3. Модуль состояния по п.2, в котором схема содержит счетное устройство.
4. Модуль состояния по п.1, в котором множество индикаторов содержит визуальный индикатор, электрически связанный со схемой.
5. Модуль состояния по п.4, в котором визуальный индикатор содержит светоизлучающий диод.
6. Модуль состояния по п.4, в котором визуальный индикатор содержит, по меньшей мере, что-то одно из следующего:
буквенно-цифровой дисплей;
точечный дисплей матричного типа и
жидкокристаллический дисплей.
7. Модуль состояния по п.1, в котором множество индикаторов содержит визуальный индикатор, электрически связанный со схемой; и звуковой индикатор, электрически связанный со схемой.
8. Модуль состояния по п.7, в котором звуковой индикатор содержит устройство вывода звукового сигнала.
9. Модуль состояния по п.7, дополнительно содержащий переключатель, электрически связанный со звуковым индикатором.
10. Модуль состояния по п.1, дополнительно содержащий передатчик, электрически связанный со схемой.
11. Хирургический аппарат, содержащий
множество датчиков и
модуль состояния, соединенный с возможностью разъема с хирургическим аппаратом, при этом модуль состояния содержит
множество контактов, при этом каждый отдельный контакт электрически связан с датчиком;
схему, электрически связанную с, по меньшей мере, одним из контактов; и множество индикаторов, при этом, по меньшей мере, один из индикаторов электрически связан со схемой,
при этом модуль состояния выполнен с возможностью разъемного размещения в рукоятке хирургического аппарата.
12. Хирургический аппарат по п.11, в котором множество датчиков содержит, по меньшей мере, какой-то один из следующих:
датчик угла шарнирного поворота;
датчик положения упора;
датчик кассеты;
датчик замыкающего рычага;
датчик смыкающего усилия;
датчик усилия прошивки/отрезания;
датчик положения ножа и датчик состояния блокировки.
13. Хирургический аппарат по п.11, в котором схема содержит управляющую схему.
14. Хирургический аппарат по п.11, в котором множество индикаторов содержит визуальный индикатор, электрически связанный со схемой.
15. Хирургический аппарат по п.14, в котором визуальный индикатор содержит светоизлучающий диод.
16. Хирургический аппарат по п.14, в котором визуальный индикатор содержит что-то одно из следующего:
буквенно-цифровой дисплей;
точечный дисплей матричного типа и жидкокристаллический дисплей.
17. Хирургический аппарат по п.11, в котором множество индикаторов содержит
визуальный индикатор, электрически связанный со схемой; и
звуковой индикатор, электрически связанный со схемой.
18. Хирургический аппарат по п.17, в котором звуковой индикатор представляет собой устройство вывода звукового сигнала.
19. Хирургический аппарат по п.17, дополнительно содержащий переключатель, электрически связанный со звуковым индикатором.
20. Хирургический аппарат по п.11, дополнительно содержащий передатчик, электрически связанный со схемой.
| US 2002165541 A1, 07.11.2002 | |||
| US 4213562 A, 22.07.1980 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Приспособление для вертикального раскрытия устья трала | 1975 |
|
SU552050A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

