Изобретение относится к области радиотехники, в частности к способам и технике нелинейной радиолокации, и может использоваться для поиска, обнаружения и распознавания объектов с нелинейными электрическими свойствами (нелинейных объектов).
Известен способ нелинейной радиолокации, основанный на том, что обнаружение нелинейного объекта (НО) осуществляется с использованием импульсного нелинейного локатора, облучающего НО импульсным зондирующим сигналом (ЗС) с несущей частотой f0 и принимающего сигнал отклика на частоте второй 2f0 или третьей 3f0 гармоники ЗС [1, с.8-9]. При этом импульсный нелинейный локатор содержит в своем составе последовательно соединенные задающий импульсный генератор, формирователь высокочастотного ЗС, приемо-передающую антенну, а также приемник, подключенный к приемо-передающей антенне и настроенный на вторую или третью гармонику ЗС. Принцип действия нелинейного локатора основан на преобразовании НО энергии ЗС в энергию высших гармоник. Недостатком является невозможность распознавания типа НО, например, для селекции откликов от случайных преобразователей частоты (ржавчина на металлических поверхностях, плетеная металлическая сетка и т.д.).
Известен также способ нелинейной радиолокации, реализованный, например, в [2], основанный на использовании специфического эффекта преобразования спектра ЗС НО, включающий прием эхо-сигналов от НО на второй и третьей гармониках ЗС, обработку и индикацию их уровней для распознавания НО оператором. Это обусловлено тем, что обычно радиолокационные цели, содержащие НО с полупроводниковыми компонентами, имеют на второй гармонике уровень сигналов отклика на 20-30 дБ более высокий, чем на третьей гармонике. Для НО контактного типа, как правило, выполняется обратное соотношение. Однако данный признак распознавания является неустойчивым, поскольку величины принимаемых на гармониках сигналов зависят, помимо свойств НО, от форм диаграмм обратного рассеяния НО и элементов фона, которые на различных гармониках могут отличаться между собой. Кроме того, наличие в зондируемой области пространства случайных преобразователей частоты (неустойчивых оксидных контактов и других объектов) обусловливает ложные срабатывания нелинейного радиолокатора. Недостатком является низкая вероятность распознавания типа НО вследствие большого числа ложных срабатываний нелинейных РЛС (НРЛС).
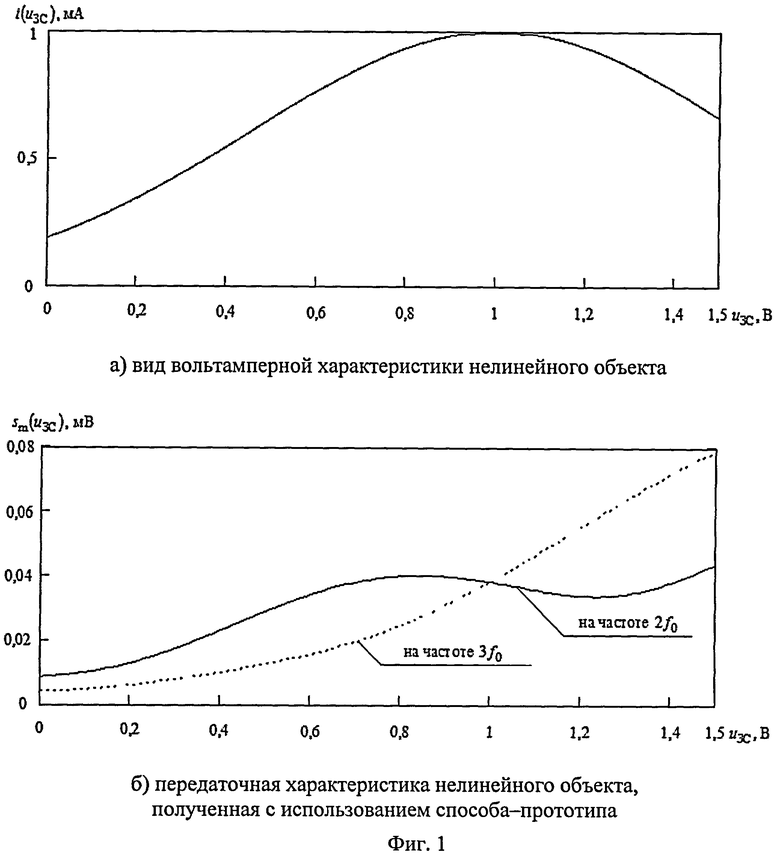
Наиболее близким по технической сущности и достигаемому результату к заявляемому способу нелинейной радиолокации (прототипом к предполагаемому изобретению) является способ, основанный на излучении ЗС в направлении на НО, приеме и регистрации сигнала отклика по двум каналам на частотах второй и третьей гармоник ЗС и распознавании типа НО по соотношению амплитуд выходных сигналов каналов, в котором амплитуда ЗС промодулирована по пилообразному закону, а уточнение типа НО производится по виду зависимости амплитуды сигнала отклика от амплитуды ЗС, регистрируемой на выходе одного из каналов приемника [3]. Однако способ-прототип не позволяет однозначно идентифицировать НО ввиду существенной разницы вида зависимостей амплитуды сигнала отклика от амплитуды ЗС, полученных на частотах 2f0 и 3f0 при сложных ВАХ (фиг.1).
Техническим результатом изобретения является увеличение вероятности правильного распознавания типа НО.
Технический результат достигается тем, что в известном способе-прототипе дополнительно выбирают на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от нелинейного объекта, N равных по величине и равноотстоящих друг от друга интервалов времени, осуществляют на каждом из них преобразование Фурье принимаемого сигнала, регистрируют зависимость амплитудно-частотного спектра  сигнала отклика от амплитуды ЗС и по ее виду уточняют тип нелинейности.
сигнала отклика от амплитуды ЗС и по ее виду уточняют тип нелинейности.
Сущность заявляемого способа состоит в следующем. Известно [3], что в способе-прототипе для определения типа НО использована зависимость амплитуды выходного сигнала НО от амплитуды входного сигнала (передаточная характеристика), т.е. фактически зависимость интенсивности сигнала отклика на гармониках ЗС от амплитуды зондирующего сигнала. В силу равенства Парсеваля [4, с.62] определение типа НО осуществимо также и в частотной области:

где s(t), E и  - соответственно принимаемый сигнал отклика от НО, его энергия и амплитудно-частотный спектр:
- соответственно принимаемый сигнал отклика от НО, его энергия и амплитудно-частотный спектр:

Для вычисления амплитудно-частотного спектра (2) на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от НО, выбирается N равных по величине и равноотстоящих друг от друга временных интервалов. С этой целью формируется N импульсов с периодом следования Т, каждый из которых имеет длительность τ0, а связь указанной последовательности импульсов с длительностью принимаемого радиоимпульса сигнала отклика от НО τи задается соотношением τи=NT. Возможность спектрального анализа принимаемого сигнала (осуществления преобразования Фурье) в течение временных интервалов от (i-1)T до τ0+(i-1)T, где  , определяемых соответственно фронтом и спадом i-го импульса, может быть обеспечена путем использования, например, транзисторного ключа [5, с.68-81], включение которого производится фронтом импульса, а выключение - спадом.
, определяемых соответственно фронтом и спадом i-го импульса, может быть обеспечена путем использования, например, транзисторного ключа [5, с.68-81], включение которого производится фронтом импульса, а выключение - спадом.
На каждом из временных интервалов осуществляется преобразование Фурье принимаемого сигнала отклика от НО с целью получения его амплитудно-частотного спектра:

а также выделяется спектральная составляющая  . Далее полученные N значений амплитудно-частотного спектра
. Далее полученные N значений амплитудно-частотного спектра  ,
,  отображаются визуально.
отображаются визуально.
Учитывая зависимость амплитуды сигнала отклика smi, на i-м временном интервале от амплитуды ЗС uЗCi [3], полагая неизменными амплитуды ЗС uЗCi=const и сигнала отклика от НО smi=const в течение временных интервалов от (i-1)T-τз до τ0+(i-1)T-τз и от (i-1)T до τ0+(i-1)T соответственно ввиду малости τ0 (τ0<<τи), где  - время задержки принимаемого сигнала отклика относительно ЗС, обусловленное удаленностью НО от НРЛС на расстояние Rн; с - скорость света, а также принимая во внимание выражения (2)-(3), можно сделать вывод о том, что последовательность составляющих амплитудно-частотного спектра , обеспечивает отображение передаточной характеристики зондируемого объекта, тем самым предоставляя оператору НРЛС дополнительную информацию для распознавания типа нелинейности зондируемого объекта с нелинейными электрическими свойствами.
- время задержки принимаемого сигнала отклика относительно ЗС, обусловленное удаленностью НО от НРЛС на расстояние Rн; с - скорость света, а также принимая во внимание выражения (2)-(3), можно сделать вывод о том, что последовательность составляющих амплитудно-частотного спектра , обеспечивает отображение передаточной характеристики зондируемого объекта, тем самым предоставляя оператору НРЛС дополнительную информацию для распознавания типа нелинейности зондируемого объекта с нелинейными электрическими свойствами.
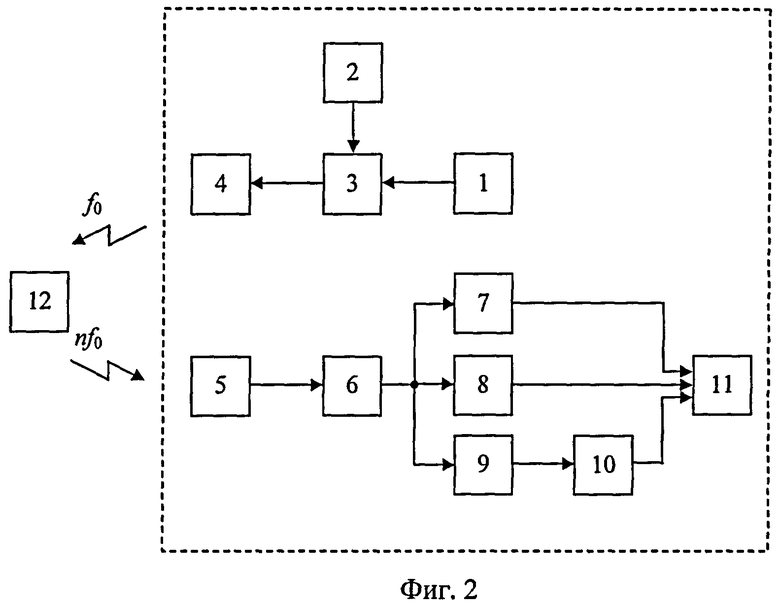
Предлагаемый способ поясняется фигурой, на которой изображены: известный двухканальный нелинейный локатор, например [2] или нелинейный локатор HP-900 [6, с.59], состоящий из генератора зондирующего сигнала 1, генератора пилообразного напряжения 2, модулятора 3, передающей антенны 4, приемной антенны 5, широкополосного усилителя 6, каналов приема и обработки сигналов отклика на второй и третьей гармониках зондирующего сигнала 7 и 8 соответственно, вычислителя преобразования Фурье при значении циклической частоты ω=0 9, запоминающего устройства 10, устройства индикации 11, соединенных как показано на фиг.2, а также объект с нелинейными электрическими свойствами 12.
Генератор зондирующего сигнала 1 вырабатывает электромагнитные колебания несущей частоты f0. Генератор пилообразного напряжения 2 вырабатывает модулирующий сигнал в виде последовательности пилообразных импульсов длительностью τи, следующих с периодом Т, передние фронты которых представляют собой линейно возрастающее от 0 до некоторого Um напряжение, а задние фронты - экспоненциально уменьшающееся от Um до 0 напряжение. В модуляторе 3 сформированные на несущей частоте f0 электромагнитные колебания подвергаются амплитудной модуляции по пилообразному закону. Передающая антенна 4 необходима для излучения поступившего на ее вход зондирующего сигнала с несущей частотой f0 в заданную область пространства. Приемная антенна 5 служит для приема эхо-сигналов, рассеянных объектом с нелинейными электрическими свойствами 14 на частотах второй и третьей гармоник ЗС. Широкополосный усилитель 6 предназначен для усиления поступивших с выхода приемной антенны 5 эхо-сигналов от НО до уровня, необходимого для работы каналов приема и обработки сигналов отклика на второй и третьей гармониках зондирующего сигнала 7 и 8, в которых обеспечивается выделение сигналов отклика на частотах 2f0 и 3f0 соответственно, а также определение их уровней. Вычислителем преобразования Фурье при значении циклической частоты ω=0 9 на каждом i-м временном интервале определяется амплитудно-частотный спектр принимаемого сигнала отклика от НО . Запоминающее устройство 10, изготовленное, например, на базе полупроводниковых запоминающих устройств [5, с.295-305], требуется для накопления информации обо всех N значениях амплитудно-частотного спектра (3). Устройство индикации 11 снабжает оператора НРЛС информацией для принятия решения о типе НО, отображая визуально, например на жидкокристаллическом дисплее, как соотношение уровней сигналов отклика от НО на частотах 2f0 и 3f0, так и дополнительную информацию в виде передаточной характеристики зондируемого НО.
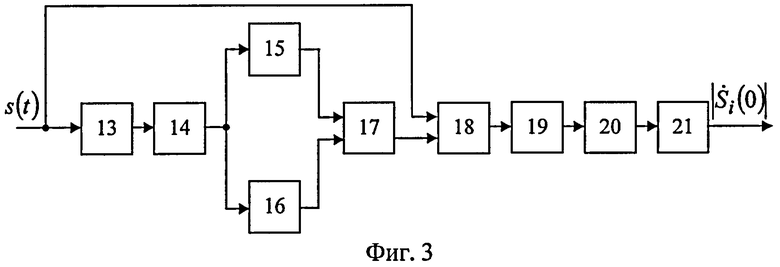
Вычислитель преобразования Фурье при значении циклической частоты ω=0 9 может быть выполнен, например, в виде устройства, структурная схема которого приведена на фиг.3.
Вычислитель преобразования Фурье при значении циклической частоты ω=0 включает диодный детектор 13, аналоговый компаратор 14, генератор прямоугольных импульсов длительности τ0 с периодом Т 15, таймер 16, первый и второй ключи 17 и 18, фильтр низких частот 19, аналого-цифровой преобразователь 20 и персональную ЭВМ 21, соединенные как показано на фиг.3.
Диодный детектор 13 предназначен для выделения уровня поступающего на его вход радиоимпульса сигнала отклика от НО s(t). Аналоговый компаратор 14 сравнивает указанный сигнал уровня с опорным (пороговым) сигналом и в момент равенства сигналов напряжение на его выходе резко изменяется, запуская генератор прямоугольных импульсов длительности τ0 с периодом Т 15 и таймер 16, которые формируют соответственно последовательность прямоугольных импульсов с заданными параметрами и прямоугольный импульс длительностью τи. Первый ключ 17 обеспечивает подключение на свой выход сигнала, поступающего на его первый вход с выхода генератора прямоугольных импульсов длительности τ0 с периодом Т 15, в течение временного интервала τи, т.е. пока импульс с выхода таймера 16 присутствует на втором входе первого ключа 17. Второй ключ 18 необходим для подключения на свой выход сигнала s(t), подаваемого на его первый вход, по импульсным сигналам с выхода первого ключа 17. Фильтр низких частот 19 служит для выделения низкочастотной составляющей спектра поступающих на его вход сигналов. Аналого-цифровой преобразователь 20 предназначен для преобразования сигнала, полученного с выхода фильтра низких частот 19, в цифровой вид. Сформированная таким образом информация в цифровом виде поступает в персональную ЭВМ 21, которая вычисляет в соответствии с (3) амплитудно-частотный спектр принимаемого сигнала отклика от НО .
Вычислитель преобразования Фурье при значении циклической частоты ω=0 работает следующим образом. Радиоимпульс сигнала отклика от НО s(t) поступает на диодный детектор 13, где выделяется его уровень и сигнал, соответствующий указанному уровню, подается на вход аналогового компаратора 14, на выходе которого происходит резкое изменение напряжения в момент равенства уровней поступающего и опорного (порогового) сигналов. Данное изменение напряжения обеспечивает включение генератора прямоугольных импульсов длительности τ0 c периодом Т 15 и таймера 16, которые в совокупности с первым и вторым ключами 17 и 18 обеспечивают требуемые временные рамки для проведения спектрального анализа сигнала s(t), т.е. фактически выделяют моменты времени от (i-1)T до τ0+(i-1)T. Фильтр низких частот 19 формирует на своем выходе низкочастотную составляющую поступающих на его вход сигналов, которая преобразуется в цифровой вид с помощью аналого-цифрового преобразователя 20. Полученные в цифровом виде сигналы поступают в ЭВМ, где непосредственно и производится расчет в соответствии с (3) амплитудно-частотного спектра принимаемого сигнала отклика от НО с помощью программных средств (математических пакетов MATHCAD [7] или MATHLAB [8]).
Способ нелинейной радиолокации поясняется следующим образом. С помощью генератора зондирующего сигнала 1, генератора пилообразного напряжения 2 и модулятора 3 формируется ЗС, представляющий собой последовательность радиоимпульсов несущей частоты f0, имеющих длительность Гц и период следования T. Полученный таким образом сигнал излучается передающей антенной 4 в заданную область пространства. Объект с нелинейными электрическими свойствами 12 преобразует энергию падающего на него электромагнитного поля ЗС в энергию высших гармоник, формируя тем самым эхо-сигнал, содержащий колебания на частотах 2f0 и 3f0. Прием эхо-сигнала осуществляют приемной антенной 5. Сигнал с выхода приемной антенны 5 подают на вход широкополосного усилителя 6, обеспечивающего усиление сигнала отклика от НО до уровня, необходимого для работы каналов приема и обработки сигналов отклика на второй и третьей гармониках зондирующего сигнала 7 и 8, которые вырабатывают на своих выходах уровни соответствующих гармонических составляющих ЗС. Полученные для сигналов на частотах 2f0 и 3f0 уровни подаются соответственно на первый и второй входы устройства индикации 11. Кроме того, сигнал с выхода широкополосного усилителя 6 поступает на вход вычислителя преобразования Фурье при значении циклической частоты ω=0 9, где реализуется N математических операций (3). Сформированные отсчеты записываются в запоминающее устройство 10, с выхода которого подаются на третий вход устройства индикации 11 для визуального отображения передаточной характеристики зондируемого НО. На основе анализа полученной таким образом информации оператор НРЛС делает заключение о типе обнаруженного НО.
Таким образом, предложенный способ нелинейной радиолокации, имеющий новые операции в виде дополнительного выбора на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от нелинейного объекта, N равных по величине и равноотстоящих друг от друга интервалов времени, осуществления на каждом из них преобразования Фурье принимаемого сигнала, регистрации зависимости амплитудно-частотного спектра сигнала отклика от амплитуды ЗС и уточнения по ее виду типа нелинейности, позволяет получить дополнительную информацию для распознавания типа зондируемого объекта с нелинейными электрическими свойствами.
Эффективность предложенного способа оценим в условиях априорно достоверного наличия НО в зондируемой области пространства (вероятность Papr=1) при вероятности правильного обнаружения НО D=0,98 по сравнению с использованием способа-прототипа. При этом в способе-прототипе также рассмотрим два случая - подключение индикатора амплитудной зависимости сигнала отклика от амплитуды ЗС [3] к каналу приема и обработки сигнала отклика на второй гармонике ЗС или к соответствующему каналу на третьей гармонике ЗС. Очевидно, при правильном обнаружении НО вероятность правильного распознавания типа его нелинейности составит Рпр2=0,5. В предлагаемом способе устройство индикации отображает передаточную характеристику НО, полученную вне каналов приема и обработки сигналов отклика на второй и третьей гармониках ЗС, поэтому Рпр1=1. Далее, учитывая, что перечисленные выше события (наличие НО в зондируемой области пространства, определение величины вероятности правильного обнаружения D и строго определенное местоположение в структуре НРЛС индикатора амплитудной зависимости сигнала отклика от амплитуды ЗС (устройства индикации)) не связаны причинно (гипотеза физической независимости), полагаем их независимыми и вероятность правильного распознавания типа нелинейности определим как:

Расчеты согласно (4) показывают, что предлагаемый способ обеспечивает вероятность правильного распознавания Pp1=1·0,98·1=0,98, а способ-прототип - Рр2=1·0,98·0,5=0,49.
Отсюда следует, что реализация предложенного способа нелинейной радиолокации обеспечивает повышение вероятности распознавания типа нелинейного объекта (в рассматриваемом случае в 2 раза).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ нелинейной радиолокации, основанный на излучении ЗС, амплитуда которого промодулирована по пилообразному закону, в направлении на НО, приеме и регистрации сигнала отклика по двум каналам на частотах второй и третьей гармоник ЗС и распознавании типа НО по соотношению амплитуд выходных сигналов каналов, в котором дополнительно выбирают на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от нелинейного объекта, N равных по величине и равноотстоящих друг от друга интервалов времени, осуществляют на каждом из них преобразование Фурье принимаемого сигнала, регистрируют зависимость амплитудно-частотного спектра сигнала отклика от амплитуды ЗС и по ее виду уточняют тип нелинейности.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявляемый способ нелинейной радиолокации способствует увеличению вероятности правильного распознавания типа НО.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы типовые узлы и устройства, применяемые в НРЛС, например в нелинейных локаторах «Люкс» [2] или HP-900 [6, с.59], известные импульсные и цифровые устройства (аналоговый компаратор [5, с.100-105], таймер [5, с.307-309], генератор прямоугольных импульсов [5, с.163-195], транзисторные ключи [5, с.68-81], аналого-цифровой преобразователь [5, с.290-295]), типовые радиотехнические устройства (диодный детектор [9, с.297], фильтр низких частот [9, с.338-346]), а также оборудование и материалы СВЧ диапазона широко распространенной технологии [10-12].
Источники информации
1. Вернигоров Н.С. Нелинейный локатор - принцип действия и основные особенности // Безопасность от А до Я, 1997, №3. - с.8-10.
2. Нелинейный локатор «Люкс». Техническое описание и инструкция по эксплуатации. - М.: Новоком, 2005.
3. Пат. RU 2205419 С2, 7 G01S 13/00, 7/292, G08B 13/24. Способ обнаружения нелинейного объекта с распознаванием типа нелинейности / Панычев С.Н., Хакимов Н.Т. №2001110922/09. Заявлено 20.04.2001. Опубл. 27.05.2003 // Бюл. №15.
4. Сергиенко А.Б. Цифровая обработка сигналов: Учебник для вузов. 2-е изд. - СПб.: Питер, 2006. - 751 с.
5. Браммер Ю.А. Импульсные и цифровые устройства: Учеб. для студентов электрорадиоприборостроительных сред. спец. учеб. заведений. / Ю.А.Браммер, И.Н.Пащук. - 6-е изд., перераб. и доп. - М.: Высшая школа, 2002. - 351 с.
6. Мусабеков П.М., Панычев С.Н. Нелинейная радиолокация: методы, техника и области применения // Зарубежная радиоэлектроника, 2000, №5. - с.54-61.
7. Дьяконов В.П. MATHCAD 8/2000: специальный справочник. - СПб.: Питер, 2001. - 592 с.
8. Дьяконов В.П. MATHLAB 6: учебный курс. - СПб.: Питер, 2002.
9. Баскаков С.И. Радиотехнические цепи и сигналы: Учеб. для вузов по спец. «Радиотехника» / С.И.Баскаков. - 4-е изд., перераб. и доп. - М.: Высшая школа, 2003. - 462 с.
10. Теория и техника генерирования, излучения и приема радиолокационных сигналов: Учебник для слушателей академии / Под ред. Ю.Н.Седышева. - Харьков: Издание ВИРТА, 1986.
11. Дулин В.Н. Электронные и квантовые приборы СВЧ: Учебное пособие для студентов высших технических учебных заведений. Издание 2-е, переработанное. - М.: Энергия, 1972.
12. Кочержевский Г.Н. Антенно-фидерные устройства. - М.: Связь, 1972. - 472 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2501035C1 |
| НЕЛИНЕЙНЫЙ РАДИОЛОКАТОР ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2510517C2 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2008 |
|
RU2382380C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2759117C1 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С НЕЛИНЕЙНЫМИ ЭЛЕКТРИЧЕСКИМИ СВОЙСТВАМИ | 2011 |
|
RU2507534C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СКРЫТЫХ НЕЛИНЕЙНЫХ РАДИОЭЛЕКТРОННЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2516436C2 |
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С НЕЛИНЕЙНЫМИ ЭЛЕКТРИЧЕСКИМИ СВОЙСТВАМИ | 2007 |
|
RU2339968C1 |
Изобретение может использоваться для поиска, обнаружения и распознавания объектов с нелинейными электрическими свойствами (нелинейных объектов). Достигаемый технический результат - повышение вероятности правильного распознавания типа зондируемого нелинейного объекта за счет получения дополнительной информации о его передаточной характеристике. Указанный результат достигается тем, что в известном способе нелинейной радиолокации, заключающемся в излучении зондирующего сигнала, амплитуда которого промодулирована по пилообразному закону, в направлении на нелинейный объект, приеме и регистрации сигнала отклика по двум каналам на частотах второй и третьей гармоник зондирующего сигнала и распознавании типа нелинейного объекта по соотношению амплитуд выходных сигналов каналов, дополнительно выбирают на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от нелинейного объекта, N равных по величине и равноотстоящих друг от друга интервалов времени, осуществляют на каждом из них преобразование Фурье принимаемого сигнала, регистрируют зависимость амплитудно-частотного спектра сигнала отклика от амплитуды зондирующего сигнала и по ее виду уточняют тип нелинейности. Сущность заявляемого способа состоит в регистрации зависимости амплитудно-частотного спектра сигнала отклика, принимаемого от нелинейного объекта, от амплитуды зондирующего сигнала при значении циклической частоты ω=0 и его отображении совместно с уровнями сигналов отклика на частотах второй и третьей гармоник зондирующего сигнала для распознавания типа нелинейности зондируемого объекта. 3 ил.
Способ нелинейной радиолокации, основанный на излучении зондирующего сигнала (ЗС), амплитуда которого промодулирована по пилообразному закону, в направлении на нелинейный объект, приеме и регистрации сигнала отклика по двум каналам на частотах второй и третьей гармоник зондирующего сигнала и распознавании типа нелинейного объекта по соотношению амплитуд выходных сигналов каналов, отличающийся тем, что дополнительно выбирают на отрезке времени, в течение которого принимается радиоимпульс сигнала отклика от нелинейного объекта, N равных по величине и равноотстоящих друг от друга интервалов времени, осуществляют на каждом из них преобразование Фурье принимаемого сигнала, регистрируют зависимость амплитудно-частотного спектра сигнала отклика от амплитуды ЗС и по ее виду уточняют тип нелинейности.
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНОГО ОБЪЕКТА С РАСПОЗНАВАНИЕМ ТИПА НЕЛИНЕЙНОСТИ | 2001 |
|
RU2205419C2 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2003 |
|
RU2253878C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| US 6049301 A, 11.04.2000 | |||
| US 6088086 A, 11.07.2000 | |||
| JP 2009036514 A, 19.02.2009 | |||
| Поворотное устройство для передачи грузов с одного транспортера на другой | 1949 |
|
SU79081A1 |

