Изобретение относится к радиотехнике, точнее к нелинейной радиолокации (НРЛС), и может быть использовано для управления движением грузоподъемных транспортных механизмов (ГПТМ) от места принятия груза до места назначения и обратно, например, домобашенных строительных кранов, портовых грузопогрузочных и грузоприемных кранов, автопогрузчиков, козловых кранов и т.д.
Далее, способ может быть использован для оптимального управления (движения по рельсам) башенных кранов с грузом: скорость, ускорение, место остановки для подъема груза на заданную высоту/этаж: для контроля подъема грузов на высоту строительным краном при ветровых нагрузках, т.е. возможного раскачивания и даже вращения груза вместе с подъемной платформой.
В общем случае навигация - это нахождение оптимального маршрута, определение местонахождения, направления и значения скорости и других параметров движения объекта. В нашем случае это движение крана по заданному маршруту с заданной скоростью, остановка в нужном месте и доставка груза в заданную точку и возвращение в исходный пункт.
Интересно применение данной системы для погрузки и разгрузки грузов на морских и речных судах портовыми кранами: автоматическое управление движением крана во времени с грузом: начало приема груза, начало движения, остановка в нужном месте с высокой точностью возле нужного трюма (спуск в него или прием груза), обратное движение и т.д. Это сулит большие экономические выгоды, т.к. простой судна в порту (время выгрузки и загрузки) оценивается в несколько тысяч долларов в час.
Также предлагаемое техническое решение может быть использовано для оптимального управления с/х машинами: тракторами для вспашки, различными уборочными машинами: комбайнами, маципурами, сенокосилками и пр., когда, перефразируя пословицу, «каждый день год кормит».
Общей проблемой эксплуатации ГПТМ, в частности строительных кранов является:
- ограничены действия в условиях плохой видимости (туман, дождь, снег, темное время суток);
- неудовлетворительные эксплуатационно-экономические показатели;
- пресловутый человеческий фактор (самочувствие и настроение машиниста-оператора, его опыт) вообще ограниченность человеческих возможностей в определении расстояния, реакции на изменении ситуации и пр.
Далее, проблемой погрузо-разгрузочных работ является производительность труда, а именно опыт и навыки машиниста-оператора, которые в большинстве случаев находятся на усредненном уровне.
Пример. Современная стройка: все операции по монтажу здания должны производиться строго по графику, вплоть до минут. Машинист подъемно-строительного крана резко взял груз стрелой крана и быстро взял с места, а груз на длинном тросе, и он начинает качаться взад/вперед и даже может вращаться, приходится остановиться и ждать успокоения груза, а это время и простой других рабочих, следовательно, убытки и задержка сроков строительства.
Второй пример. Разгрузка-погрузка в порту морского транспорта. Морской портовый кран должен подъехать на причале к трюму, принять груз, отъехать с ним к ожидаемой машине, разгрузиться, снова подъехать к трюму и т.д. Требуется непрерывная четкая работа, т.к. время разгрузки и/или погрузки в порту стоит очень дорого. Значит, все опять зависит от опыта-навыка машиниста. Напрашивается автоматизация этих процессов.
В настоящее время известны попытки автоматизации подобных работ, но они находятся в зачаточном состоянии, например, роботизированные автопогрузчики в складских помещениях, но они не нашли широкого применения в силу очень сложных технических решений, а, значит, очень дороги и не оправдывают себя.
Из истории строительства известен пример очень ускоренного строительства с применением механизации и частичной автоматизации. Это решение начала 60-х годов президента де Голля о выходе из НАТО, тогда штаб-квартиру которой перенесли из Парижа в Брюссель, для чего была построена новая штаб-квартира всего за пол года не под крышу, а под ключ со всеми коммуникациями, оборудованием, узлами связи. Это был гигантский объем работ, очень сложный и очень быстрый. График строительства был расписан буквально по минутам на целые сутки и выполнялся неукоснительно.
Полностью интересных и экономически оправданных решений авторами в доступных источниках неизвестны.
Технической задачей изобретения является повышение уровня автоматизации различных погрузочно-разгрузочных работ, монотонных технологических операций типа вспашка, жатва и др.
Технический результат достигается за счет использования нелинейных РЛС в предлагаемой области применения, позволяющих на примере строительного крана определять:
- непрерывные координаты нахождения строительного крана на его ж/д пути и остановки в нужном месте;
- задание и определение непрерывных координат гака стрелы крана;
- задание и определение непрерывных координат тележки стрелы крана от его мачты;
- определение и задание высоты гака стрелы крана с грузом относительно уровня земли;
- учет скорости ветра при работах крана;
- уменьшение временных затрат, а следовательно и экономических затрат;
- повышение производительности труда.
Для решения поставленной задачи предлагается способ трехмерной навигации в автоматизированной помощи управлением грузо-подъмно-транспортными механизмами - ГПТМ на основе применения радиолокации, характеризующийся тем, что на пути следования ГПТМ используются маркеры на основе нелинейных рассеивателей - HP электромагнитных волн, а для распознавания маркеров применены нелинейные РЛС - НРЛС, расположенные на механизме с диаграммой направленности, ориентированной последовательно по мере перемещения на каждый маркер; причем НРЛС передает на маркеры зондирующие сигналы одной высокой частоты f0, а от маркеров принимаются отраженные и переформатированные сигналы на частота 2 f0 и 3 f0, по которым НРЛС после фазовой импульсной или частотной обработки с зондирующим сигналом f0 определяет направление на маркер, расстояние до него и вычисляет мгновенную скорость механизма, эти данные непрерывно передаются на центральный процессор управления механизма, который по СПО управляет движением механизма по пути следования и подъемом/спуском груза в назначенных пунктах маршрута, также учитывая скорость ветра для регулирования всех видов движения: уменьшая их скорость при сильном ветре до остановки при очень больших значениях.
На фиг. 1 изображена структурная электрическая схема устройства по данному способу, на которой показано;
1 - пульт управления краном (ПУ) с жидкокристаллическим дисплеем (ЖКИ) с клавиатурой типа на смартфоне;
2 - модем (приемник-преобразователь команд с пульта управления);
3 - центральный процессор (ЦП) схемы;
4 - специализированное программное обеспечение (СПО);
5 - первая нелинейная РЛС (НРЛС);
6 - маркеры М (нелинейные рассеиватели - HP) на пути следования крана;
7 - анемометр (определитель скорости ветра;)
8 - исполнительные механизмы;
9 - кран с тележкой;
10 - блок приемо-передающих антенн НРЛС 5;
РК - радиоканал;
f0 - зондирующий сигнал от НРЛС;
2f0 и 3f0 - принятые сигналы от HP (вторая гармоника от f0 и третья от f0).
11 - вторая НРЛС;
12-третья НРЛС.
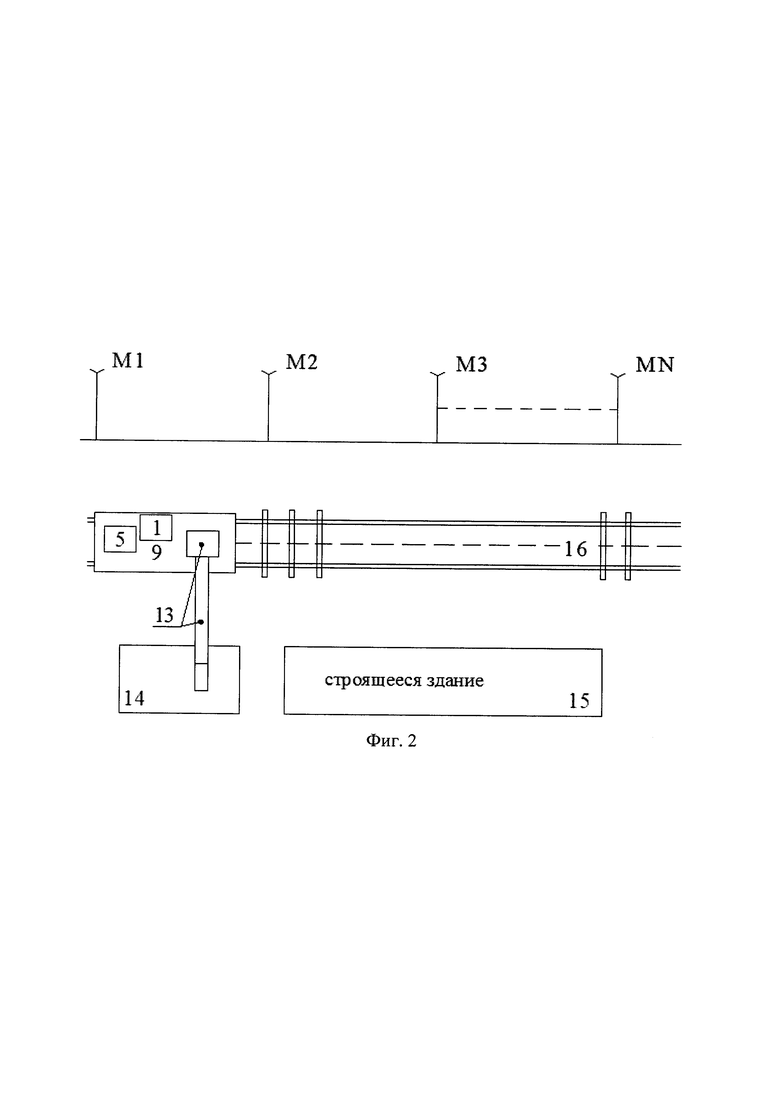
На фиг. 2 изображена структурная схема расположения составных частей способа, на которой показано:
13 - мачта и стрела крана (расположены поперек ж/д пути);
14 - грузовая площадка;
15 - строящееся здание;
16 - ж/д колея;
M1 - MN - маркеры (HP), расположенные вдоль грузовых площадок строящегося здания.
Схема на фиг. 1 имеет следующие соединения: пульт управления 1 радиоканалом РК через модем 2 соединен двунаправленной шиной А с управляющим входом ЦП 3, первая НРЛС 5 зондирующим сигналом частоты f0 последовательно соединена с нелинейными рассеивателями маркеров 6, выходы которых второй 2 f0 и третьей гармоникой 3 f0 этой частоты также последовательно соединены с блоком приемо-передающих антенн 10, выход которого двунаправленной шиной Б соединен с сигнальным входом ЦП 3, в памяти которого введено СПО 4; выходы ЦП 3 соединены с силовыми механизмами 8 крана 9; вторая НРЛС 11 двунаправленной шиной В соединена с ЦП 3, а двунаправленной шиной Г - с нелинейными рассеивателями 12; выход анемометра 7 соединен с сигнальным входом ЦП 3.
Выбор нелинейных РЛС в данной заявке обусловлен следующим.
Традиционная активная радиолокация использует линейное отражение (рассеяние) электромагнитных колебаний от различных объектов. При этом приемник РЛС воспринимает отраженные колебания той же частоты (с учетом поправки на доплеровский сдвиг), что и излученное колебание. Извлекаемая из принятого сигнала информация обычно закодирована либо во временном запаздывании, либо в величине фазового набега, либо в запаздывании закона модуляции (например, по частоте) принятого сигнала относительно зондирующего, либо в разности временных сдвигов или фазовых набегов сигналов, принятых несколькими приемными трактами, либо в различии их амплитуд. Обработка сигналов в активных РЛС позволяет обнаруживать различные объекты (радиолокационные цели), измерять их координаты, распознавать цели, осуществлять их поиск, автоматическое сопровождение и решать другие задачи.
Во многих случаях радиолокационные цели находятся на фоне других предметов естественного или искусственного происхождения (например, на фоне подстилающей поверхности земли). При этом на вход приемного устройства РЛС поступает сигнал не только от цели (полезный сигнал), но и от всех предметов, попадающих в диаграмму направленности антенной системы РЛС и диффузно рассеивающих электромагнитные волны. Эти колебания образуют внешнюю помеху, которая затрудняет обнаружение и наблюдение полезного сигнала от цели. Маскирующее действие внешних помех является одной из основных проблем современной активной линейной радиолокации.
Альтернативой традиционной радиолокации служит нелинейная радиолокация, которая представляет собой зондирование электромагнитными волнами сред с нелинейными включениями - нелинейными рассеивателями (HP) - это, как правило, рукотворный объект, способный преобразовать спектр падающих на него радиоволн в волны более высоких частот, кратных зондирующей. Это приводит к появлению новых свойств: повышение уровня сигнал/шум, повышенной избирательности, вообще помехозащищенность.
Схема на фиг. 2 имеет следующие составные узлы и их расположение относительно друг друга;
На ж/д колее 16 расположен строительный кран 9, сам кран содержит мачту и стрелу 13; с одной стороны ж/д пути 16 расположено строящееся здание 15, а с другой - маркеры 6 - M1 - MN, рядом с ж/д колее 16 расположена грузовая площадка 14 для принятия груза строительным краном 9; блок приемопередающих антенн 10 НРЛС 5 расположен на противовесе тележки 21 крана таким образом, что его диаграмма направленности ориентирована на маркеры M1 - MN последовательно по мере движения крана 9 по ж/д колее 16.
На фиг. 3, 4 изображена упрощенная схема крана 9,, на которых изображено:
17 - тележка крана;
18 - тележка стрелы крана;
19 - груз на тросе стрелы крана;
20 - трос стрелы крана;
21 - противовес;
М - расстояние от стрелы крана до уровня земли = const;
H1 - расстояние от стрелы крана до груза = var;
DH1 - поправка к H1 на высоту груза;
S1 - измеренное расстояние от НРЛС 2 до тележки крана = var;
S2 - измеренное расстояние от НРЛС 2 до груза 19 на тросе 20 = var.
Схема имеет следующие соединения.
Кран 9 расположен на тележке 17 с противовесом 21, на котором расположена первая НРЛС 5; на тележке стрелы крана расположен первый HP 12, а на гаке (не показан) троса 20 (по существу на верху груза 19) расположен второй HP 12, в месте стыка мачты крана и стрелы расположена вторая НРЛС 11.
Стрела крана 13 при движении по ж/д колее находится в походном положении строго вдоль ж/д колеи, а при остановке у нужного маркера поворачивается строго перпендикулярно в сторону строящегося здания.
Перед началом работы оператором грузовой площадки 14 с ПУ1 заносятся следующие операции: начало движения, остановка крана у нужного маркера, нужная высота подъема груза также заносится высота груза от гака до дна груза, координаты груза по высоте и координаты разгрузочной площадки. После снятия груза оператором-приемщиком груза с ПУ1 подается команда на обратный путь
(пульт управления ездит вместе с краном: например, в специальном чехле на мачте 12).
Работа способа по фиг. 2 происходит следующим образом. Операции приема грузов с площадки 14 и их разгрузка на крыше строящегося здания 15 происходят вручную, а доставка грузов происходит в автоматическом режиме. Для этого около ж/д пути 16 через определенные интервалы между ними, начиная с грузовой площадки, ставятся маркеры M1 - MN. Число маркеров напрямую зависит от длины здания и расположения разгрузочных площадок. В центральный процессор 3 в специальное программное обеспечение (СПО) заносится последовательность действий крана: подъем груза на заданную высоту начало движения, скорость движения, остановка у определенного маркера, угол поворота стрелы с грузом, опускание груза в заданное место. После разгрузки происходит подъем люльки (гака) крана 9, возвращение на первоначальное место и опять все сначала.
Примеры
1. Башенный кран.
- Маркировка пути (M1 - MN).
- В СПО ПУ1 заносится последовательность действий крана.
- Остановка крана в нужном месте у маркера 1 грузовой площадки 14.
- Принятие груза.
- Следование по маршруту с заданной скоростью.
- Остановка у нужного маркера.
- Подъем груза на верх здания, разгрузка.
- Обратный маршрут до грузовой платформы.
2. Портовый кран (погрузка в трюмы и/или на палубу).
- Принятие груза в нужном месте.
- Следование по маршруту.
- Остановка в нужном месте (например, в 1й, 2й или N трюм, или место у палубы).
- Погрузка.
- Обратный маршрут.
3. Портовый кран (разгрузка).
- Следование к месту.
- Остановка в нужном месте (1, 2, 3 трюмы, место около палубы).
- Подъем груза.
- Следование к месту разгрузки.
- Разгрузка.
- Обратный маршрут.
В обоих примерах выдерживаются заданные параметры движения: ускорение, скорость движения, величина тормозного пути, скорость подъема/спуска грузов, угловая скорость поворота стрелы крана и пр.
Следует заметить, что это не полная автоматизация, а, по большому счету, автоматизированная система помощи управления технологическими процессами при использовании грузо-подъемно-транспортными механизмами. Это позволяет:
- значительно повысить качество движения и доставки грузов на место назначения вне зависимости от погонных условий (дождь, снег, туман, ночь);
- минимизировать время доставки (экономия времени);
- следовательно, снизить себестоимость строительных и погрузочно-разгрузочных работ.
Работа по определению нужного маркера по фиг. 1 происходит следующим образом.
Нелинейный радиолокатор (НРЛС) представляет собой радиотехническую систему, решающую задачу обнаружения заданного маркера.
НРЛС состоит из передающего устройства, осуществляющего одно- или многочастотное зондирование пространства, настроенного на одну из гармоник зондирующего сигнала или на одну из комбинационных частот, и схемы обработки принятых сигналов.
Таким образом, НРЛС при движении крана последовательно определяет точное местонахождение каждого маркера, а по сигналу ЦП по СПО выдает команды на торможение у нужного маркера и подъем груза на заданную верхнюю грузовую площадку строящегося здания.
В качестве HP каждого маркера применен р-n переход, например, на основе диода Шоттки, включенный между точками возбуждения простейшего излучателя и помещенный в радиопрозрачный экран на мачте высотой порядка одного метра.
На фиг. 5 изображен ход лучей для измерения ординат крана при приближении к остановочному маркеру, на которой показано: HP - нелинейный рассеиватель; НРЛС - нелинейная радиолокационная станция;
1 - расстояние между HP и серединой ж/д пути прохождения крана на высоте HP - НРЛС = const;
1' - измеренное расстояние между HP и РЛС в текущий момент времени, равное var;
(а - б) - вычисленное расстояние от крана до начала остановочного маркера.
Работа системы при измерении ординат крана до остановочного маркера происходит следующим образом. С частотой запросного зондирующего сигнала с НРЛС происходит измерение дальности до HP. При каждом запросе и ответном отраженном сигнале вычисляется в ЦП расстояние от крана до начала остановочного маркера по теореме Пифагора, равное 
На фиг. 6 изображен ход лучей для измерения мгновенной скорости крана, на которой показано:
HP - нелинейный рассеиватель;
НРЛС - нелинейная радиолокационная станция;
А - Г - условные положения НРЛС по времени приближения к остановочному маркеру;
R - расстояние между HP и серединой ж/д пути прохождения крана на высоте HP - НРЛС = const;
R1 - R3 - измеренные расстояния между НРЛС и HP в каждый момент времени, равные var;
ΔS1 - ΔSN, вычисленные расстояния прохождения крана за промежутки времени Δt1 - ΔtN.
Измерение мгновенной скорости происходит следующим образом. С частотой запросного зондирующего сигнала с НРЛС происходит измерение дальности до HP и засекается время между двумя запросами, тогда эта мгновенная скорость измеряется по формуле:  в нашем случае
в нашем случае  причем ΔS вычисляется как на фиг.3 путем вычитания расстояния от крана до остановочного маркера между двумя соседними запросами, т.е. ΔS1=S1-S2 и т.д. Измерение скорости нужно для управления движением крана с целью точной остановки и нужного маркера по сигналам на исполнительные механизмы с ЦП.
причем ΔS вычисляется как на фиг.3 путем вычитания расстояния от крана до остановочного маркера между двумя соседними запросами, т.е. ΔS1=S1-S2 и т.д. Измерение скорости нужно для управления движением крана с целью точной остановки и нужного маркера по сигналам на исполнительные механизмы с ЦП.
Т.к. время между запросами составляет несколько миллисекунд, то скорость можно усреднить за несколько запросов.
Определение высоты груза (координаты по высоте) на стреле крана происходит следующим образом. Вторая НРЛС 11 вычисляет расстояние до первого НР1, равное S1, также измеряет расстояние до второго НР2равное S2. Т.к. известна высота от земли до стрелы, то по прямоугольному треугольнику Н2 - S1 - S2 в ЦП3 вычисляется катет Н2 по выражению:

И затем вычисляется высота от земли до гака, равная H1=Н-Н2 и только потом вычисляется полная высота от низа груза до земли, равная H1-ΔН. Т.к. высота груза может быть разной, то для его плавного опускания ее нужно обязательно учитывать.
В заключение следует заметить, что эту задачу: отыскание меток - маркеров и по ним определить скорость и ординату крана можно и обыкновенной РЛС не нелинейной, но это технически очень сложно, т.к. такие локаторы не отличают сигнал маркера от других целей на пути следования крана и вообще от любых отражающих предметов, а их около остановочных маркеров может быть много, как на всякой стройке, следовательно, будет много ложных целей, а, какая из них истинная, не выделяется. Только применение НРЛС однозначно решает эту задачу, причем не менее успешно, причем мощность передатчика НРЛС лежит в пределах микроватт, что соизмеримо с мощностью сотового телефона.
Нелинейные рассеиватели (метки) в условиях с множеством переотражений из-за наличия большого количества металлических предметов могут быть выполнены в виде активных радиометок с использованием сверхширокополосных радиосигналов, устойчивых к сложным условиям распространения.
Активные радиометки обладают собственным источником питания и, как следствие, увеличенной дальностью работы, и реализовать дополнительную обработку, например, шифрование.
В качестве активных радиометок могут быть и другие варианты, например, параметрические радиометки.
Несмотря на ограниченное время службы активной радиометки, оно обычно составляет годы, что более чем остаточно в большинстве случаев применения.
В настоящее время разработаны и применяются микробатарейки со сроком службы в несколько лет с большим количеством ампер/часов. При раскодировании кодовой модуляции: порядковый номер маркера заносится на ЖКИ в ПУ по РК, из которого видно, около какого остановочного маркера находится кран, несмотря, например, на плохую видимость: ночь, туман, снежные заряды и пр.
В предлагаемом способе описано применение трех НРЛС и их расположение. В действительности от условий решающих задач по доставке груза их число может быть увеличено и расположение всех НРЛС может быть другим.
Таким образом, в предлагаемом техническом решении выполняется трехмерная навигация по длине пути, высоте подъема груза и по определению координат разгрузочной площадки - ширина.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ЛОКОМОТИВА | 2018 |
|
RU2684965C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЦИФРОВОЙ Ж/Д КАРТЫ И ПРИМЕНЕНИЕ ЕЁ ДЛЯ МОНИТОРИНГА ДВИЖЕНИЯ ЛОКОМОТИВА | 2020 |
|
RU2769100C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА ПО ИНФРАСТРУКТУРЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2747818C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ И МАЛОРАЗМЕРНЫХ БПЛА | 2021 |
|
RU2795472C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСТВОРА ВАЛКОВ МАШИН НЕПРЕРЫВНОГО ЛИТЬЯ ЗАГОТОВОК | 2016 |
|
RU2641936C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2021 |
|
RU2778364C1 |
| РАДИОЛОКАЦИОННО-ТОМОГРАФИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРОВЫХ ПОТОКОВ | 2023 |
|
RU2805031C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ВВЕДЕННОГО ИМПЛАНТАТА | 2019 |
|
RU2726595C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА НА ОСНОВЕ ЭФФЕКТА ДОПЛЕРА | 2015 |
|
RU2602730C1 |





Предложен способ трехмерной навигации в автоматизированной помощи управлением грузо-подъемно-транспортными механизмами - ГПТМ на основе применения радиолокации. На пути следования ГПТМ используют маркеры на основе нелинейных рассеивателей - HP электромагнитных волн, а для распознавания маркеров применяют нелинейные РЛС - НРЛС, расположенные на механизме с диаграммой направленности, ориентированной последовательно по мере перемещения на каждый маркер. Причем НРЛС передает на маркеры зондирующие сигналы одной высокой частоты f0, а от маркеров принимаются отраженные и переформатированные сигналы на частоте 2 f0 и 3 f0, по которым НРЛС после фазовой импульсной или частотной обработки с зондирующим сигналом f0 определяет направление на маркер, расстояние до него и вычисляет мгновенную скорость механизма. Эти данные непрерывно передаются на центральный процессор управления механизма, который с помощью программного обеспечения управляет движением механизма по пути следования и подъемом/спуском груза в назначенных пунктах маршрута, учитывая скорость ветра для регулирования всех видов движения, уменьшая скорость при сильном ветре до остановки. Достигается повышение уровня автоматизации погрузочно-разгрузочных работ. 2 з.п. ф-лы, 6 ил.
1. Способ трехмерной навигации в автоматизированной помощи управлением грузо-подъемно-транспортными механизмами - ГПТМ на основе применения радиолокации, характеризующийся тем, что на пути следования ГПТМ используются маркеры на основе нелинейных рассеивателей - HP электромагнитных волн, а для распознавания маркеров применены нелинейные РЛС - НРЛС, расположенные на механизме с диаграммой направленности, ориентированной последовательно по мере перемещения на каждый маркер; причем НРЛС передает на маркеры зондирующие сигналы одной высокой частоты f0, а от маркеров принимаются отраженные и переформатированные сигналы на частоте 2 f0 и 3 f0, по которым НРЛС после фазовой импульсной или частотной обработки с зондирующим сигналом f0 определяет направление на маркер, расстояние до него и вычисляет мгновенную скорость механизма, эти данные непрерывно передаются на центральный процессор управления механизма, который по СПО управляет движением механизма по пути следования и подъемом/спуском груза в назначенных пунктах маршрута, также учитывая скорость ветра для регулирования всех видов движения: уменьшая их скорость при сильном ветре до остановки при очень больших значениях.
2. Способ по п. 1, характеризующийся тем, что маркеры расположены на ключевых точках маршрута: начало, конец и в определенных местах по пути следования ГПТМ, а также на самом ГПТМ.
3. Способ по п. 1, характеризующийся тем, что первая НРЛС расположена на балласте тележки крана и ориентирована на маркеры на пути следования ГПТМ, вторая НРЛС расположена в стыке мачты со стрелой крана и ориентирована на маркер НР1, расположенный на гаке троса и на маркер НР2, расположенный внизу тележки мачты крана и ориентирована на маркер, расположенный на геометрическом центре разгрузочной площадки.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| DE 102011002772 A1, 19.07.2012 | |||
| CN 1429726 A, 16.07.2003. | |||

