Изобретение относится к технике связи, а конкретнее - к способам передачи и приема радиосигналов наземных радиомаяков и может быть использовано для определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в информационно-управляющих радиотехнических системах различного назначения, в том числе в радиотехнических комплексах систем навигации и посадки летательных аппаратов (ЛА). Способ может быть применен при испытаниях на полигонах ЛА в качестве метода, обеспечивающего выбор оптимальных измерительных систем и их рационального размещения на испытательной трассе, формировании автоматизированного комплекса обработки принятых радиосигналов и разработке алгоритмического и программного обеспечения оценки характеристик испытываемых объектов.
Возрастающая интенсивность воздушного движения и ужесточение норм безопасности полетов повышают требования к точности и надежности управления полетом ЛА на всех фазах полета, позволяющие ЛА находиться в заданных коридорах и эшелонах, а экипажу точно выполнять требуемые процедуры и маневры. Для решения этих задач в первую очередь необходимо однозначное и точное измерение пространственных координат объекта. Знание пространственных координат позволит выполнить движение ЛА по заданной траектории с требуемой точностью.
Заявляемый способ разработан с целью удовлетворения, в частности, возрастающим требованиям к устойчивой к помехам безопасной всепогодной высокоточной радионавигационной системы. Реализация способа позволит, кроме того, упростить системы навигации и посадки, увеличить их технико-экономическую эффективность с учетом всех компонентов, влияющих на стоимость и технические показатели.
Известны способы передачи и приема радиосигналов, используемые, в том числе, в системах измерения координат объектов и основанные на применении угломерных, дальномерных, разностно- и суммарно-дальномерных и комбинированных методов определения местоположения объекта с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигнала [Патенты РФ №№2018855, 2115137, 2258242, 2309420; Основы испытаний летательных аппаратов / Е.И.Кринецкий и др. Под ред. Е.И.Кринецкого. - М.: Машиностроение, 1979, с.64-89; Радиотехнические системы / Ю.М.Казаринов и др. Под ред. Ю.М.Казаринова. - М.: ИЦ «Академия», 2008, гл.10]. Известные способы имеют те или иные недостатки, например необходимость механического перемещения антенной системы, недостаточную разрешающую способность по дальности, необходимость априорной информации о местоположении объекта, невозможность однозначного определения координат объекта, большие размеры измерительной базы, ненадежность и др.
По критерию минимальной достаточности за прототип принят способ передачи и приема радиосигналов наземных радиомаяков, фазовые центры передающих антенн которых находятся в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0,x,y), касательной к поверхности земли в точке 0, и осью 0z, направленной от земли, при котором передают импульсные радиосигналы и на приемнике объекта измеряют разности времен приходов принятых радиосигналов [Радиотехнические системы / Ю.М.Казаринов и др. Под ред. Ю.М.Казаринова. - М.: ИЦ «Академия», 2008, гл.10, с 437-443, 449-454].
Преимуществом заявляемого способа передачи и приема радиосигналов наземных радиомаяков по сравнению с известными и прототипом является возможность повышения технико-экономической эффективности радиотехнических комплексов определения пространственных координат и других характеристик объекта, функционально связанных с его координатами. Это достигается тем, что на объекте регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема радиосигналов, передаваемых с трех радиомаячных пунктов с верхней и нижней передающими антеннами в каждом. При этом фазовые центры верхних и нижних антенн расположены определенным образом. Пространственные координаты определяют по простым выражениям, зависящим от средних значений многократно измеренных разностей между временами приемов соответствующих радиосигналов. Способ существенно облегчает исключение систематической погрешности. Он позволяет уменьшить влияние на точность определения координат случайных погрешностей путем повторения измерений указанных разностей N раз, т.к. среднеквадратическая ошибка среднего значения в  раз меньше среднеквадратической ошибки отдельного измерения. Кроме того, более высокая точность достигается не только за счет уменьшения влияния указанных ошибок, но и за счет возможности выбора из трех предлагаемых вариантов определения пространственных координат объекта наилучшего по точности. Также способ исключает неоднозначность их определения. Способ позволяет варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи.
раз меньше среднеквадратической ошибки отдельного измерения. Кроме того, более высокая точность достигается не только за счет уменьшения влияния указанных ошибок, но и за счет возможности выбора из трех предлагаемых вариантов определения пространственных координат объекта наилучшего по точности. Также способ исключает неоднозначность их определения. Способ позволяет варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи.
Для достижения указанного технического результата в способе передачи и приема радиосигналов наземных радиомаяков, фазовые центры передающих антенн которых находятся в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0,x,y), касательной к поверхности земли в точке 0, и осью 0z, направленной от земли, при котором передают импульсные радиосигналы и на приемнике объекта измеряют разности времен приходов принятых радиосигналов, в соответствии с настоящим изобретением с трех радиомаячных пунктов, упорядоченных заданным образом, с двумя передающими антеннами, верхней и нижней в каждом, с фазовыми центрами верхних антенн, расположенными на одинаковой заданной высоте z=h1, и фазовыми центрами нижних антенн, расположенными на одинаковой заданной высоте z=h2, с координатами на плоскости (0,x,y), одинаковыми для соответствующих верхних и нижних антенн, равными x1=с, y1=b; x2=a, y2=0; x3=-a, y3=0, с нумерацией индексов для верхних антенн, соответствующей нумерации радиомаячных пунктов 1, 2 и 3, и нумерацией индексов для нижних антенн, на три большей значений индексов, соответствующих нумерации верхних антенн, и равных 4, 5, 6, соответственно, передают синхронизировано, упорядочено и поочередно по одному радиосигналу с каждой антенны каждого радиомаячного пункта в виде группы из шести последовательных импульсов длительностью Δt1 каждый, с задержкой между импульсами Δt2, удовлетворяющей условию, что произведение скорости распространения радиосигнала на Δt2 превышает максимальное из значений 
 и
и  причем передачу указанной группы импульсов повторяют с задержкой между группами Δt3>Δt2, на объекте, в том числе подвижном, последовательно принимают передаваемые в группе радиосигналы, синхронизировано регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема на объекте всех указанных радиосигналов, с учетом знака и исключения времен задержки или времен опережения i-тых радиосигналов относительно j-того радиосигнала, обусловленных указанными задержками последовательно передаваемых импульсов, измеряют разности Δti,j между временами приемов; i-тых радиосигналов и j-того радиосигнала, индекс которого может принимать одно из значений 1, 2, 3, а индексы i, образующие наборы из пяти значений, принимают для каждого заданного индекса j значения 1, 2, 3, 4, 5, 6 за исключением значения индекса i, равного индексу j, указанные измерения для заданного индекса j повторяют последовательно еще N - 1 раз, в процессе измерений при каждом повторении измерений для каждого i производят суммирование соответствующих измеренных разностей времен Δti,j с ранее суммированными и после N-го измерения определяют средние значения
причем передачу указанной группы импульсов повторяют с задержкой между группами Δt3>Δt2, на объекте, в том числе подвижном, последовательно принимают передаваемые в группе радиосигналы, синхронизировано регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема на объекте всех указанных радиосигналов, с учетом знака и исключения времен задержки или времен опережения i-тых радиосигналов относительно j-того радиосигнала, обусловленных указанными задержками последовательно передаваемых импульсов, измеряют разности Δti,j между временами приемов; i-тых радиосигналов и j-того радиосигнала, индекс которого может принимать одно из значений 1, 2, 3, а индексы i, образующие наборы из пяти значений, принимают для каждого заданного индекса j значения 1, 2, 3, 4, 5, 6 за исключением значения индекса i, равного индексу j, указанные измерения для заданного индекса j повторяют последовательно еще N - 1 раз, в процессе измерений при каждом повторении измерений для каждого i производят суммирование соответствующих измеренных разностей времен Δti,j с ранее суммированными и после N-го измерения определяют средние значения  как результаты деления соответствующих накопленных сумм на заданное число N, причем N задают из условия, что V[Δt1+5NΔt2+(N-1)Δt3]<Δs, где V - скорость перемещения объекта, Δs - заданный характерный масштаб, определяющий, в том числе, разрешающую способность определения пространственных координат объекта, и для заданного индекса j определяют преимущественно пространственные координаты объекта (x0j,y0j,z0j) в соответствии с выражениями
как результаты деления соответствующих накопленных сумм на заданное число N, причем N задают из условия, что V[Δt1+5NΔt2+(N-1)Δt3]<Δs, где V - скорость перемещения объекта, Δs - заданный характерный масштаб, определяющий, в том числе, разрешающую способность определения пространственных координат объекта, и для заданного индекса j определяют преимущественно пространственные координаты объекта (x0j,y0j,z0j) в соответствии с выражениями



 где a>0, b≠0, h1-h2>0;
где a>0, b≠0, h1-h2>0;
l1=d6,1, m1=d5,1, n1=d3,1, p1=d2,1, l2=d6,2, m2=d4,2, n2=d3,2, p2=d1,2;
l3=d5,3, m3=d4,3, n3=d2,3, p3=d1,3;  и индекс i может принимать значения 1, 2, …, 6; vs - скорость распространения радиосигнала, а при необходимости определяют и другие характеристики объекта, функционально связанные с его координатами, и полученную информацию передают потребителю.
и индекс i может принимать значения 1, 2, …, 6; vs - скорость распространения радиосигнала, а при необходимости определяют и другие характеристики объекта, функционально связанные с его координатами, и полученную информацию передают потребителю.
Также после измерения для каждого индекса j=1, 2, 3 определяют параметр  где
где 


 Aj=lj-mj-nj+pj;
Aj=lj-mj-nj+pj; 
Cj=lj+mj-nj-pj, определяют индекс j, для которого Kj минимальное, и для найденного таким образом значения индекса j определяют пространственные координаты (x0j,y0j,z0j) по указанным формулам.
Кроме того, радиосигналы передают антеннами, фазовые центры которых расположены так, что значение с=0.
Также радиосигналы передают антеннами, фазовые центры которых расположены так, что значение 
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о способах того же назначения с указанной совокупностью отличительных признаков, что позволяет считать заявляемый способ новым и имеющим изобретательский уровень. Ниже изобретение описано более детально.
Сущность способа заключается в следующем.
Импульсные радиосигналы наземных радиомаяков передают с антенн, фазовые центры которых находятся в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0,x,y), касательной к поверхности земли в точке 0, и осью 0z, направленной от земли. На приемнике объекта измеряют разности времен приходов принятых радиосигналов.
Технический результат, заключающийся в повышении технико-экономической эффективности радионавигационных систем определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, достигается за счет того, что с трех радиомаячных пунктов, упорядоченных заданным образом, передают синхронизировано, упорядочено и поочередно по одному радиосигналу с каждой антенны каждого радиомаячного пункта в виде группы из шести последовательных импульсов длительностью Δt1 каждый. При этом передачу осуществляют с верхней и нижней антенн каждого радиомаячного пункта. Фазовые центры верхних антенн расположены на одинаковой заданной высоте z=h1 и фазовые центры нижних антенн расположены на одинаковой заданной высоте z=h2 с координатами на плоскости (0,x,y), одинаковыми для соответствующих верхних и нижних антенн, равными x1=с, y1=b; x2=a, y2=0; x3=-a, y3=0, с нумерацией индексов для верхних антенн, соответствующей нумерации радиомаячных пунктов 1, 2 и 3, и нумерацией индексов для нижних антенн, на три большей значений индексов, соответствующих нумерации верхних антенн, и равных 4, 5, 6, соответственно. Между импульсами должна быть задержка Δt2, удовлетворяющая условию, что произведение скорости распространения радиосигнала на Δt2 превышает максимальное из значений 
 и
и  - это предотвращает их наложение. Передачу групп импульсов повторяют с задержкой между группами Δt3>Δt2, обеспечивающей определенный порядок регистрации приема радиосигналов.
- это предотвращает их наложение. Передачу групп импульсов повторяют с задержкой между группами Δt3>Δt2, обеспечивающей определенный порядок регистрации приема радиосигналов.
На объекте, в том числе подвижном, последовательно принимают передаваемые в группе радиосигналы. В базу данных подвижного объекта введены сведения о координатах антенн радиомаячных пунктов, например, обслуживающих соответствующие аэродромы. На объекте синхронизировано регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времени приема всех указанных радиосигналов, с учетом знака и исключения времен задержки или времен опережения; i-тых радиосигналов относительно j-того радиосигнала, обусловленных указанными задержками последовательно передаваемых импульсов. Затем измеряют разности Δti,j между временами приемов; i-тых радиосигналов и j-того радиосигнала. Индекс j-того радиосигнала может принимать одно из значений 1, 2, 3, а индексы i, образующие наборы из пяти значений, принимают для каждого заданного индекса у значения 1, 2, 3, 4, 5, 6 за исключением значения индекса i, равного индексу j.
Для заданного индекса j указанные измерения повторяют последовательно еще N-1 раз. В процессе измерений при каждом повторении измерений для каждого i производят суммирование соответствующих измеренных разностей времен Δti,j с ранее суммированными. После N-го измерения определяют средние значения как результаты деления соответствующих накопленных сумм на заданное число N. При этом N задают из условия, что V[Δt1+5NΔt2+(N-1)Δt3]<Δs, где V - скорость перемещения объекта, Δs - заданный характерный масштаб, определяющий, в том числе, разрешающую способность определения пространственных координат объекта. Многократное повторение измерений (N раз) позволяет уменьшить влияние на точность определения координат случайных погрешностей измерений Δti,j, т.к. среднеквадратическая ошибка среднего значения в раз меньше среднеквадратической ошибки отдельного измерения. Систематические ошибки могут быть исключены путем калибровки.
Далее для заданного индекса j определяют преимущественно пространственные координаты объекта (x0j,y0j,z0j) в соответствии с выражениями



 где a>0, b≠0, h1-h2;
где a>0, b≠0, h1-h2;
l1=d6,1, m1=d5,1, n1=d3,1, p1=d2,1, l2=d6,2, m2=d4,2, n2=d3,2, p2=d1,2;
l3=d5,3, m3=d4,3, n3=d2,3, p3=d1,3; и индекс i может принимать значения 1, 2, …, 6; vs - скорость распространения радиосигнала. При необходимости определяют и другие характеристики объекта, функционально связанные с его координатами, и полученную информацию передают потребителю. Полученная информация, в том числе, может быть отображена с использованием цифровых карт местности и геоинформационных технологий.
Также после измерения для каждого индекса у=1,2,3 определяют параметр  где
где 


 Aj=lj-mj-nj+pj;
Aj=lj-mj-nj+pj;  Cj=lj+mj-nj-pj и определяют индекс j, для которого Kj минимальное. Для найденного таким образом значения индекса j определяют пространственные координаты (x0j,y0j,z0j) по указанным формулам. В этом случае дополнительно достигается более высокая точность за счет возможности выбора из трех предлагаемых вариантов определения пространственных координат объекта наилучшего по точности. Способ позволяет варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи. Можно получать, в том числе, центрально-симметричные зоны с погрешностью в зоне, не превышающей погрешности определения координат на границе зоны.
Cj=lj+mj-nj-pj и определяют индекс j, для которого Kj минимальное. Для найденного таким образом значения индекса j определяют пространственные координаты (x0j,y0j,z0j) по указанным формулам. В этом случае дополнительно достигается более высокая точность за счет возможности выбора из трех предлагаемых вариантов определения пространственных координат объекта наилучшего по точности. Способ позволяет варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи. Можно получать, в том числе, центрально-симметричные зоны с погрешностью в зоне, не превышающей погрешности определения координат на границе зоны.
В данном способе применяется простой импульсный метод. Благодаря достаточно широкому спектру импульсных радиосигналов существенно снижается влияние интерференционных эффектов и замирания сигналов. Развитие используемой для реализации способа технологической базы, в том числе связанной с развитием широкополосной и сверхширокополосной связи, развитием средств формирования коротких и сверхкоротких импульсов, синхронизации, измерения абсолютного времени с высокой точностью, которая уже сейчас достигает наносекунд и выше (контролируют временное положение с точностью лучше 10 пикосекунд [Р.Нестеров. wsyachina.narod.ru, обращение 09.06.2009; В.Дмитриев. Технология передачи информации с использованием сверхширокополосных сигналов. Компоненты и технологии, №9, 2003], предполагает, что данный способ имеет хорошие перспективы по дальнейшему увеличению точности определения пространственных координат объекта. Способ обладает достаточным быстродействием определения координат и параметров подвижного объекта при сохранении заданной точности. Он легко реализуется в вычислительных процессорах вследствие использования простых выражений для определения пространственных координат. Следует отметить относительную простоту схемотехнических решений построения соответствующей передающей и приемной аппаратуры при реализации способа [В.Дмитриев, цит. выше].
Проиллюстрируем возможности заявляемого способа на примерах математического моделирования определения пространственных координат с заданными среднеквадратическими ошибками σ определения их среднеарифметических значений, соответствующими требованиям, предъявляемым к средствам навигации и посадки ЛА [см., например. Радиотехнические системы / Ю.М.Казаринов и др., цит. выше, с.424].
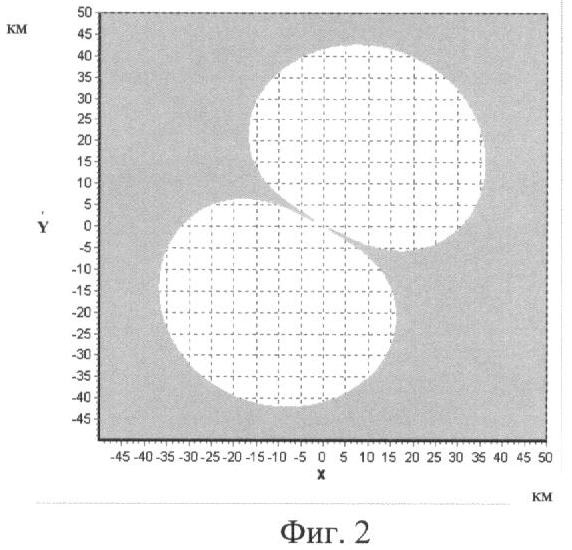
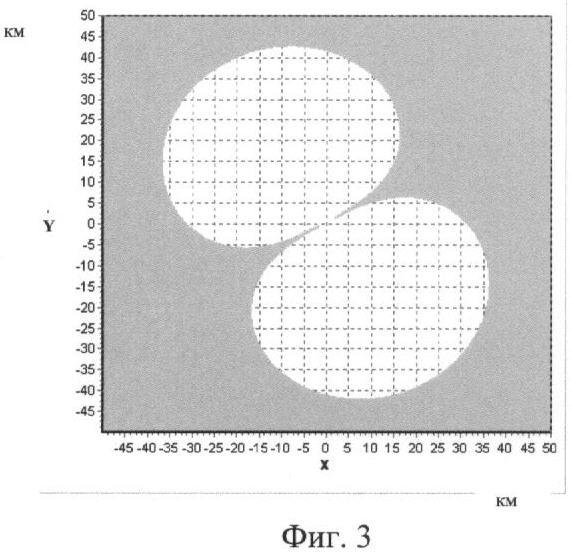
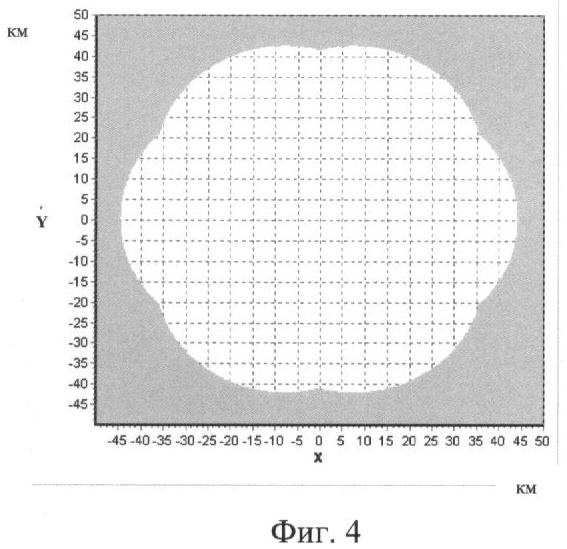
Зададим для всех примеров одинаковые среднеквадратические ошибки отдельных измерений dij, равные 3 мм, высоты фазовых центров верхних антенн h1=4 м, высоты фазовых центров нижних антенн h2=1 м и базы a=50 метров,  На фигурах затемнены зоны, в которых среднеквадратические ошибки σ определения среднеарифметических значений координат превышают заданные указанные ошибки на границах зон. На фиг.1-4 z=1 км, σ=200 метров, N=40000. Эти значения соответствуют условиям полета в зоне аэродрома. На фиг.1 представлены результаты моделирования для j=1, на фиг.2 - для j=2, на фиг.3 - для j=3. Результаты моделирования для случая, когда в каждой точке пространства определяют индекс j, для которого Kj минимальное, и определение координат производят для параметров, соответствующих этому j, представлены на фиг.4. Такой подход позволяет получить осесимметричную зону действия и существенно увеличить ее объем.
На фигурах затемнены зоны, в которых среднеквадратические ошибки σ определения среднеарифметических значений координат превышают заданные указанные ошибки на границах зон. На фиг.1-4 z=1 км, σ=200 метров, N=40000. Эти значения соответствуют условиям полета в зоне аэродрома. На фиг.1 представлены результаты моделирования для j=1, на фиг.2 - для j=2, на фиг.3 - для j=3. Результаты моделирования для случая, когда в каждой точке пространства определяют индекс j, для которого Kj минимальное, и определение координат производят для параметров, соответствующих этому j, представлены на фиг.4. Такой подход позволяет получить осесимметричную зону действия и существенно увеличить ее объем.
На фиг.5 представлены результаты моделирования для z=0,03 км, σ=1 м, N=4000. Эти значения соответствуют условиям захода ЛА на посадку [Радиотехнические системы, цит. выше, с.424].
Приведенные примеры иллюстрируют работоспособность способа применительно к навигации и посадке ЛА.
Перечислим основные достоинства способа:
- используются три радиомаячных пункта с верхней и нижней антеннами на каждом, передающие одинаковые импульсные радиосигналы, при этом фазовые центры верхних антенн расположены на одной высоте h1, а фазовые центры нижних антенн расположены также на одной высоте h2,
- обеспечивает однозначное определение пространственных координат объекта с заданной точностью,
- не требует большой базы,
- определение координат производится по простым выражениям с высоким быстродействием,
- легко реализуется в вычислительных процессорах,
- в системах радионавигации существенно упрощает радиооборудование,
- позволяет получить осесимметричную зону действия реализующих его систем определения пространственных координат с заданной точностью и существенно увеличивает ее объем.
Результативность и эффективность использования заявляемого способа передачи и приема радиосигналов наземных радиомаяков состоит в том, что он может быть применен на практике для развития и совершенствования радиотехнических комплексов определения координат объектов, а также в других приложениях. Способ позволяет определять их однозначно простыми по сравнению с известными методами.
Таким образом, отличительные признаки заявляемого способа обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию «новизны».
Результаты поиска известных решений, в том числе имеющих отношение к радиопеленгации, радионавигации, радиоуправлению и связи, с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2436232C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2432678C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2436260C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2436242C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2436261C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439797C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2432676C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439800C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2432675C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2439799C1 |
Изобретение относится к технике связи и может быть использовано для однозначного определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в информационно-управляющих радиотехнических системах различного назначения, в том числе, в радиотехнических комплексах систем навигации летательных аппаратов (ЛА). Технический результат - увеличение эффективности передачи радиосигналов и возможность варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи. Для этого на объекте регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема радиосигналов, передаваемых с трех радиомаячных пунктов с верхней и нижней передающими антеннами в каждом. При этом фазовые центры верхних и нижних антенн расположены определенным образом. Пространственные координаты определяют по выражениям, зависящим от средних значений многократно измеренных разностей между временами приемов соответствующих радиосигналов. Выбор по точности осуществляют из трех вариантов определения пространственных координат объекта, что позволяет получить осесимметричную зону действия реализующих его систем и существенно увеличивает ее объем. 3 з.п. ф-лы, 5 ил.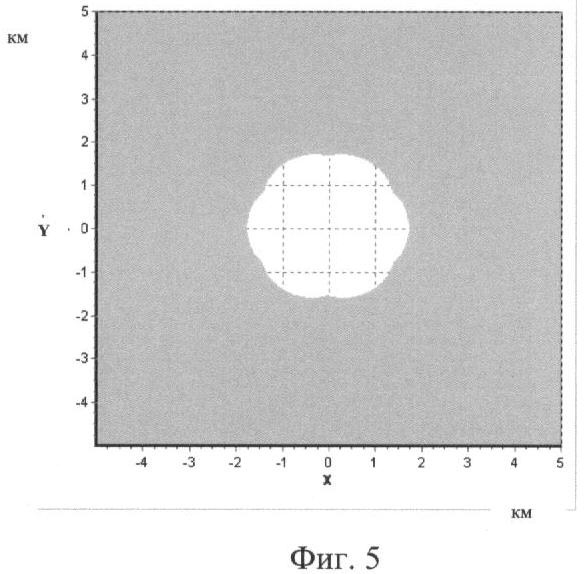
1. Способ передачи и приема радиосигналов наземных радиомаяков, фазовые центры передающих антенн которых находятся в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0,x,y), касательной к поверхности земли в точке 0, и осью 0z, направленной от земли, при котором передают импульсные радиосигналы и на приемнике объекта измеряют разности времен приходов принятых радиосигналов, отличающийся тем, что с трех радиомаячных пунктов, упорядоченных заданным образом, с двумя передающими антеннами, верхней и нижней в каждом, с фазовыми центрами верхних антенн, расположенными на одинаковой заданной высоте z=h1, и фазовыми центрами нижних антенн, расположенными на одинаковой заданной высоте z=h2, с координатами на плоскости (0,x,y), одинаковыми для соответствующих верхних и нижних антенн, равными x1=c, y1=b; x2=a, y2=0; x3=-а, y3=0; с нумерацией индексов для верхних антенн, соответствующей нумерации радиомаячных пунктов 1, 2 и 3, и нумерацией индексов для нижних антенн, на три большей значений индексов, соответствующих нумерации верхних антенн, и равных 4, 5, 6 соответственно, передают синхронизированно, упорядоченно и поочередно по одному радиосигналу с каждой антенны каждого радиомаячного пункта в виде группы из шести последовательных импульсов длительностью Δt1 каждый, с задержкой между импульсами Δt2, удовлетворяющей условию, что произведение скорости распространения радиосигнала на Δt2 превышает максимальное из значений 
 и
и  причем передачу указанной группы импульсов повторяют с задержкой между группами Δt3>Δt2 на объекте, в том числе подвижном, последовательно принимают передаваемые в группе радиосигналы, синхронизированно регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема на объекте всех указанных радиосигналов, с учетом знака и исключения времен задержки или времен опережения i-х радиосигналов относительно j-го радиосигнала, обусловленных указанными задержками последовательно передаваемых импульсов, измеряют разности Δti,j между временами приемов i-х радиосигналов и j-го радиосигнала, индекс которого может принимать одно из значений 1, 2, 3, а индексы i, образующие наборы из пяти значений, принимают для каждого заданного индекса j значения 1, 2, 3, 4, 5, 6, за исключением значения индекса i, равного индексу j, указанные измерения для заданного индекса j повторяют последовательно еще N-1 раз, в процессе измерений при каждом повторении измерений для каждого i производят суммирование соответствующих измеренных разностей времен Δti,j с ранее суммированными и после N-го измерения определяют средние значения
причем передачу указанной группы импульсов повторяют с задержкой между группами Δt3>Δt2 на объекте, в том числе подвижном, последовательно принимают передаваемые в группе радиосигналы, синхронизированно регистрируют преимущественно по временному положению переднего фронта приходящих импульсных радиосигналов моменты времен приема на объекте всех указанных радиосигналов, с учетом знака и исключения времен задержки или времен опережения i-х радиосигналов относительно j-го радиосигнала, обусловленных указанными задержками последовательно передаваемых импульсов, измеряют разности Δti,j между временами приемов i-х радиосигналов и j-го радиосигнала, индекс которого может принимать одно из значений 1, 2, 3, а индексы i, образующие наборы из пяти значений, принимают для каждого заданного индекса j значения 1, 2, 3, 4, 5, 6, за исключением значения индекса i, равного индексу j, указанные измерения для заданного индекса j повторяют последовательно еще N-1 раз, в процессе измерений при каждом повторении измерений для каждого i производят суммирование соответствующих измеренных разностей времен Δti,j с ранее суммированными и после N-го измерения определяют средние значения  как результаты деления соответствующих накопленных сумм на заданное число N, причем N задают из условия, что V[Δt1+5NΔt2+(N-1)Δt3]<Δs, где V - скорость перемещения объекта, Δs - заданный характерный масштаб, определяющий в том числе разрешающую способность определения пространственных координат объекта, и для заданного индекса j определяют преимущественно пространственные координаты объекта (x0j,y0j,z0j) в соответствии с выражениями
как результаты деления соответствующих накопленных сумм на заданное число N, причем N задают из условия, что V[Δt1+5NΔt2+(N-1)Δt3]<Δs, где V - скорость перемещения объекта, Δs - заданный характерный масштаб, определяющий в том числе разрешающую способность определения пространственных координат объекта, и для заданного индекса j определяют преимущественно пространственные координаты объекта (x0j,y0j,z0j) в соответствии с выражениями



 где a>0, b≠0, h1-h2>0;
где a>0, b≠0, h1-h2>0;
l1=d6,1, m1=d5,1, n1=d3,1, p1=d2,1, l2=d6,2, m2=d4,1, n2=d3,2, p2=d1,2;
l3=d5,3, m3=d4,3, n3=d2,3, p3=d1,3; и индекс i может принимать значения 1, 2, …, 6; vs - скорость распространения радиосигнала, а при необходимости определяют и другие характеристики объекта, функционально связанные с его координатами, и полученную информацию передают потребителю.
2. Способ по п.1, отличающийся тем, что после измерения  для каждого индекса j=1, 2, 3 определяют параметр
для каждого индекса j=1, 2, 3 определяют параметр
 ,
,
где
 ;
;  ;
;
 ;
;  ;
;
Aj=lj-mj-nj+pj;  ; Cj=lj+mj-nj-pj,
; Cj=lj+mj-nj-pj,
определяют индекс j, для которого Kj минимальное, и для найденного таким образом значения индекса j определяют пространственные координаты (x0j,y0j,z0j) по указанным формулам.
3. Способ по любому из пп.1 и 2, отличающийся тем, что радиосигналы передают антеннами, фазовые центры которых расположены так, что значение с=0.
4. Способ по п.3, отличающийся тем, что радиосигналы передают антеннами, фазовые центры которых расположены так, что значение 
| СКЛЯР БЕРНАРД | |||
| Цифровая связь | |||
| Теоретические основы и практическое применение | |||
| - М.: Изд | |||
| дом «ВИЛЬЯМС», 2004, с.32-36 | |||
| УСТРОЙСТВО СТАТИСТИЧЕСКОГО УПЛОТНЕНИЯ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1997 |
|
RU2110897C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА СВЯЗИ С ОРТОГОНАЛЬНЫМИ СИГНАЛАМИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2275745C1 |
| МНОГОРЕЖИМНОЕ УСТРОЙСТВО РАДИОСВЯЗИ И МНОГОРЕЖИМНЫЙ СОТОВЫЙ РАДИОТЕЛЕФОН | 1993 |
|
RU2128886C1 |
| US 4726020 A, 16.02.1988 | |||
| US 5119397 А, 02.06.1992. | |||

