Изобретение относится к области сельского хозяйства и может быть использовано в системах управления агропромышленными комплексами, использующими технологию точного земледелия.
Известна система информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащая "n" автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины и подключенные к нему датчики текущего состояния сельскохозяйственной машины, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, "k" блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и по крайней мере одно автоматизированное рабочее место непосредственного управления и контроля, включающее в себя персональную ЭВМ с заложенными в нее сведениями о технологии обработки участков сельскохозяйственных угодий и данными о текущем состоянии посевов (см. патент Германии №4442171 С2, А01В 79/00, 25.01.1996). Данная система предназначена для обслуживания одного фермерского хозяйства. Сведения о текущем состоянии сельскохозяйственных угодий заносятся в ЭВМ непосредственно фермером. Система предназначена для одиночного фермерского хозяйства и предполагается, что фермер единолично управляет техникой и сам принимает все решения.
Известна также система информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащая "n" автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины и подключенные к нему датчики текущего состояния сельскохозяйственной машины, устройство для внешнего ввода данных, блок визуального отображения данных, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, "k" блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики текущего состояния контролируемого участка сельскохозяйственных угодий. Предполагается, что имеется также внешняя ЭВМ, но задачи и функции ее не определены (см. патент США №6199000, НКИ 701/50, 06.03.2001). Данная система также предназначена для обслуживания индивидуального фермерского хозяйства.
Известна, помимо вышеуказанных, система информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащая "n" автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины и подключенные к нему датчики текущего состояния сельскохозяйственной машины, устройство для внешнего ввода данных, блок визуального отображения данных, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, к блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики текущего состояния контролируемого участка сельскохозяйственных угодий, и головное автоматизированное рабочее место управления предприятием, включающее в себя приемопередающее устройство, персональную ЭВМ с заложенной в нее библиотекой математических моделей, описывающих весь парк сельскохозяйственных машин и все участки сельскохозяйственных угодий, устройство для внешнего ввода данных, блок визуального отображения данных, внешнее запоминающее устройство, включающее блок хранения метеорологической информации местных метеостанций и метеоспутников, блок хранения информации от средств внешнего контроля сельскохозяйственных машин и участков сельскохозяйственных угодий и подсистему принятия решения коллегией главных специалистов, при этом автоматизированные рабочие места сельскохозяйственных машин и блоки автоматизированного контроля отдельных участков сельскохозяйственных угодий дистанционно связаны с автоматизированным рабочим местом управления предприятием (см. патент РФ №2251240, A01B 79/00, A01D 91/00, 05.10.2005). Данная система обеспечивает более полное информационное обслуживание сельскохозяйственного предприятия. Однако в данной системе не учитывается текущее состояние сельскохозяйственных угодий, что затрудняет управление предприятием.
Наиболее близкой к заявленному изобретению по совокупности существенных признаков является система информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащая "n" автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, "k" блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики текущего состояния контролируемого участка сельскохозяйственных угодий, и головное автоматизированное рабочее место управления предприятием, включающее в себя приемопередающее устройство, ЭВМ с заложенной в нее библиотекой математических моделей, описывающих весь парк сельскохозяйственных машин и все участки сельскохозяйственных угодий, устройство для внешнего ввода данных, блок визуального отображения данных, внешнее запоминающее устройство, включающее блок хранения метеорологической информации местных метеостанций и метеоспутников, блок хранения информации от средств внешнего контроля сельскохозяйственных машин и участков сельскохозяйственных угодий и подсистему принятия решения коллегией главных специалистов, при этом автоматизированные рабочие места сельскохозяйственных машин и блоки автоматизированного контроля отдельных участков сельскохозяйственных угодий дистанционно связаны с автоматизированным рабочим местом управления предприятием, оснащенным подсистемой коррекции математических моделей отдельных участков сельскохозяйственных угодий, связанной с блоком хранения информации от средств внешнего наблюдения, библиотекой математических моделей и приемопередающим устройством.
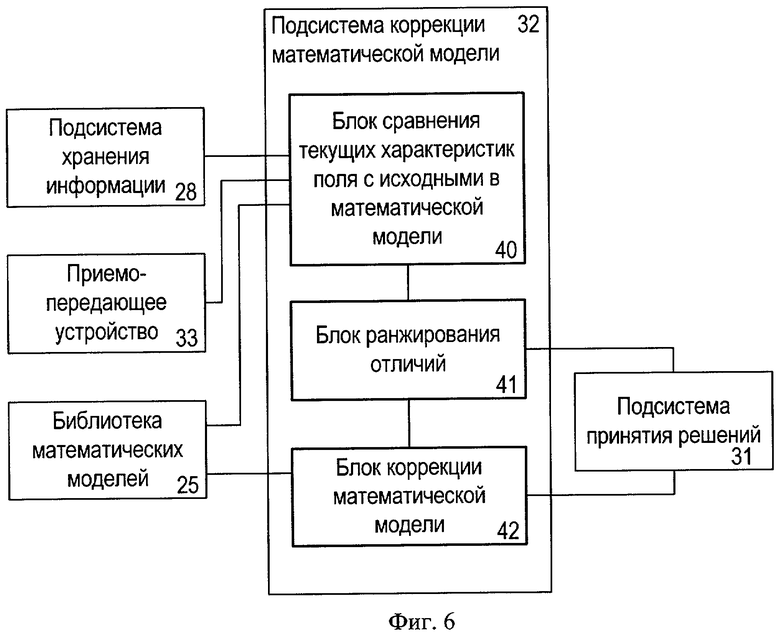
При этом подсистема коррекции математических моделей отдельных участков сельскохозяйственных угодий включает в себя последовательно соединенные блок сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными характеристиками математической модели, блок ранжирования отличий и блок коррекции математической модели, при этом блок хранения информации от средств внешнего контроля, приемопередающее устройство и библиотека математических моделей соединены с блоком сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными данными математической модели, а выход блока коррекции математической модели соединен с библиотекой математических моделей.
Кроме того, блок ранжирования отличий дополнительно соединен с блоком коррекции математической модели через подсистему принятия решения коллегией главных специалистов (см. патент РФ №2295218 C1).
Оснащение головного автоматизированного рабочего места подсистемой коррекции математических моделей отдельных участков сельскохозяйственных угодий, связанной с блоком хранения информации от средств внешнего наблюдения, библиотекой математических моделей и приемопередающим устройством, дает возможность оперативно изменить математическую модель участка сельскохозяйственных угодий с учетом текущего состояния участка, используя информацию, поступившую от внешних средств наблюдения и датчиков текущего состояния участка, и учесть текущее состояние участка при принятии решения о его дальнейшем технологическом использовании. Полнота сведений, необходимых для изменения математической модели и принятия решения о дальнейшем использовании участка, обеспечивается наличием в системе информационного обеспечения блоков хранения информации от внешних средств наблюдения и возможностью дистанционного получения информации от датчиков автоматизированных рабочих мест на сельскохозяйственных машинах и датчиков в блоках автоматизированного контроля участков сельскохозяйственных угодий.
Предложенная структура подсистемы коррекции математических моделей отдельных участков сельскохозяйственных угодий, включающая в себя последовательно соединенные блок сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными характеристиками математической модели, блок ранжирования отличий и блок коррекции математической модели, при этом блок хранения информации от средств внешнего контроля, приемопередающее устройство и библиотека математических моделей соединены с блоком сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными данными математической модели, а выход блока коррекции математической модели соединен с библиотекой математических моделей, дает возможность учесть при коррекции математической модели степень изменения текущих характеристик участка, а дополнительное соединение блока ранжирования отличий с блоком коррекции математической модели через подсистему принятия решения коллегией главных специалистов обеспечивает оперативное принятие решения об использовании участка сельскохозяйственных угодий при существенном изменении характеристик участка, например при вымораживании посевов зимой, когда требуется принятие кардинального решения.
Данная система дает возможность оперативно учесть изменения состояния участков сельскохозяйственных угодий и планировать технологический процесс на участке при дальнейшей работе с учетом изменения состояния участка.
Основным недостатком данной системы является неупорядоченность процесса управления сбором информации воздушных и космических средств внешнего контроля - космических аппаратов (КА) дистанционного зондирования Земли (ДЗЗ), а также пилотируемых летательных аппаратов (ПЛА) и беспилотных летательных аппаратов (БЛА). При запросе данных из блока хранения информации от средств внешнего контроля, поступающих от системы коррекции математической модели и/или подсистемы принятия решений, может обнаружиться, что соответствующих по полноте, содержанию, времени регистрации и другим параметрам данных в указанном блоке хранения нет. Эта ситуация наиболее вероятна при поиске данных ДЗЗ, т.к. возможности их получения зависят от условий прохождения над контролируемыми полями нужного (по составу съемочной аппаратуры) КА ДЗЗ, наличию облачности в районе съемок, условиям освещенности и др.
Поэтому в данную систему необходимо ввести ряд новых блоков и связей, устраняющих указанные недостатки, в частности, создать возможность гарантированного получения данных ДЗЗ и воздушного контроля, либо, по крайней мере, данных воздушного контроля.
Задачей, на решение которой направлено предлагаемое изобретение, является создание системы оперативного информационного обслуживания сельскохозяйственного предприятия, использующего технологии точного земледелия, обеспечивающей принятие управленческих решений на основе полной, своевременно зарегистрированной информации от средств внешнего контроля.
Для решения поставленной задачи в системе информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащей "n" автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, к блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики текущего состояния контролируемого участка сельскохозяйственных угодий, и головное автоматизированное рабочее место управления предприятием, включающее в себя приемопередающее устройство, ЭВМ с заложенной в нее библиотекой математических моделей, описывающих весь парк сельскохозяйственных машин и все участки сельскохозяйственных угодий, устройство для внешнего ввода данных, блок визуального отображения данных, внешнее запоминающее устройство, включающее блок хранения метеорологической информации местных метеостанций и метеоспутников, блок хранения информации от средств внешнего контроля сельскохозяйственных машин и участков сельскохозяйственных угодий и подсистему принятия решения коллегией главных специалистов, при этом автоматизированные рабочие места сельскохозяйственных машин и блоки автоматизированного контроля отдельных участков сельскохозяйственных угодий дистанционно связаны с автоматизированным рабочим местом управления предприятием, а головное автоматизированное рабочее место управления предприятием оснащено подсистемой коррекции математических моделей отдельных участков сельскохозяйственных угодий, связанной с блоком хранения информации от средств внешнего наблюдения, библиотекой математических моделей и приемопередающим устройством, согласно изобретению, головное рабочее место управления предприятием дополнительно оснащено подсистемой управления сбором информации от внешних средств контроля, связанной с подсистемой принятия решений, системой коррекции математической модели и блоком хранения информации от средств внешнего контроля.
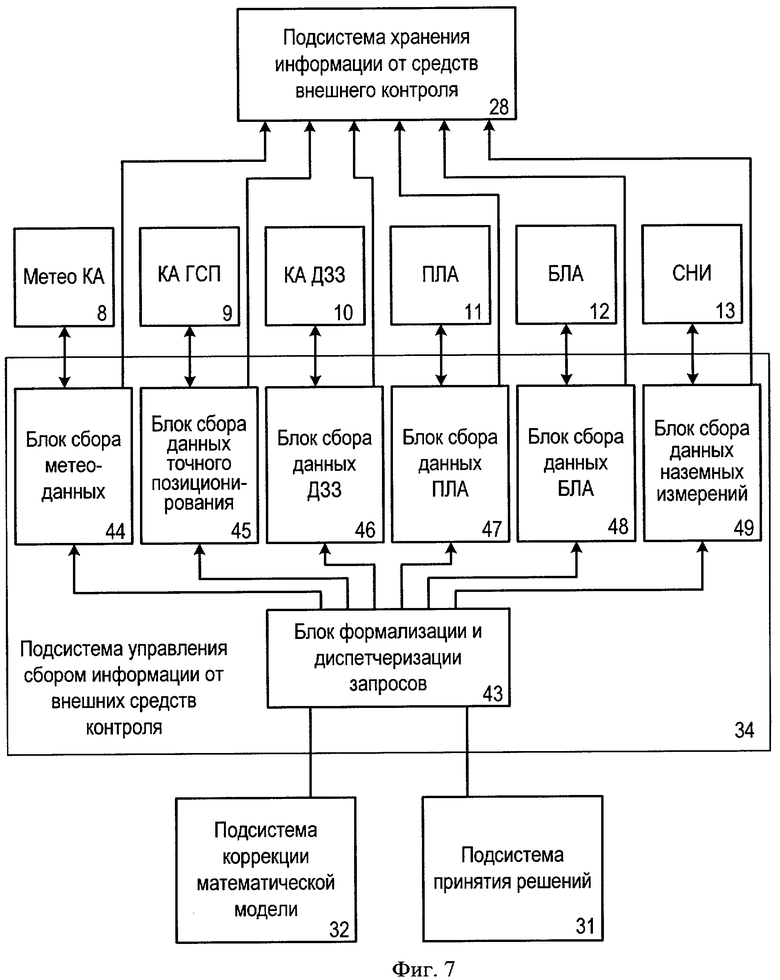
При этом подсистема управления сбором информации от внешних средств контроля включает в себя блок формализации и диспетчеризации запросов, обеспечивающий преобразование запросов на получение информации от внешних средств контроля в формализованной, установленной операторами этих средств форме, а также их выдачу для получения информации от различных источников - метеорологических КА, КА глобальной системы позиционирования (ГСП), КА ДЗЗ, ПЛА, БЛА и средств наземных измерений (СНИ). Связь с каждым внешним источником информации осуществляется через соответствующий блок сбора данных, осуществляющий выдачу запроса, прием информации от внешнего источника, а также, после первичного контроля, передачу данных в подсистему хранения информации от средств внешнего контроля.
Периодичность получения, структура, форматы, и объем данных от различных источников отличаются из-за разной физической сущности средств внешнего контроля, поэтому в подсистеме неприменим универсальный блок сбора данных. Блоки сбора данных для каждого источника выполняют сходные задачи, но имеют различия в структуре и в алгоритмах обработки получаемой информации.
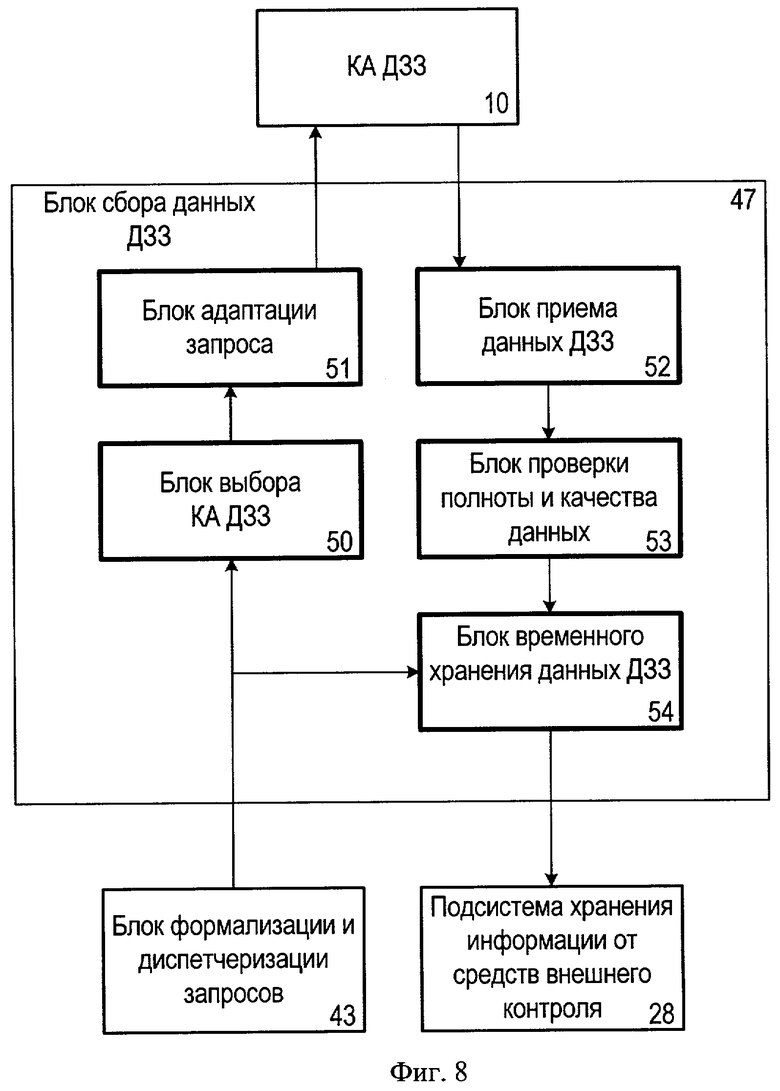
Так, например, в блоке сбора данных ДЗЗ, в соответствии с поставленной задачей контроля, осуществляется выбор класса КА ДЗЗ, выполняющих съемки земной поверхности с характеристиками, оптимальными для решения поставленной задачи, затем формализованный запрос адаптируется под конкретный КА ДЗЗ и осуществляется съемка заданного района или подбор удовлетворяющей запросу информации в архиве съемок выбранного КА ДЗЗ. Поступающая с КА ДЗЗ информация подвергается входному контролю на соответствие данных запросу и в случае положительного результата сохраняется в блоке временного хранения данных, а затем по запросу или по мере заполнения памяти блока передается в подсистему хранения информации от средств внешнего контроля.
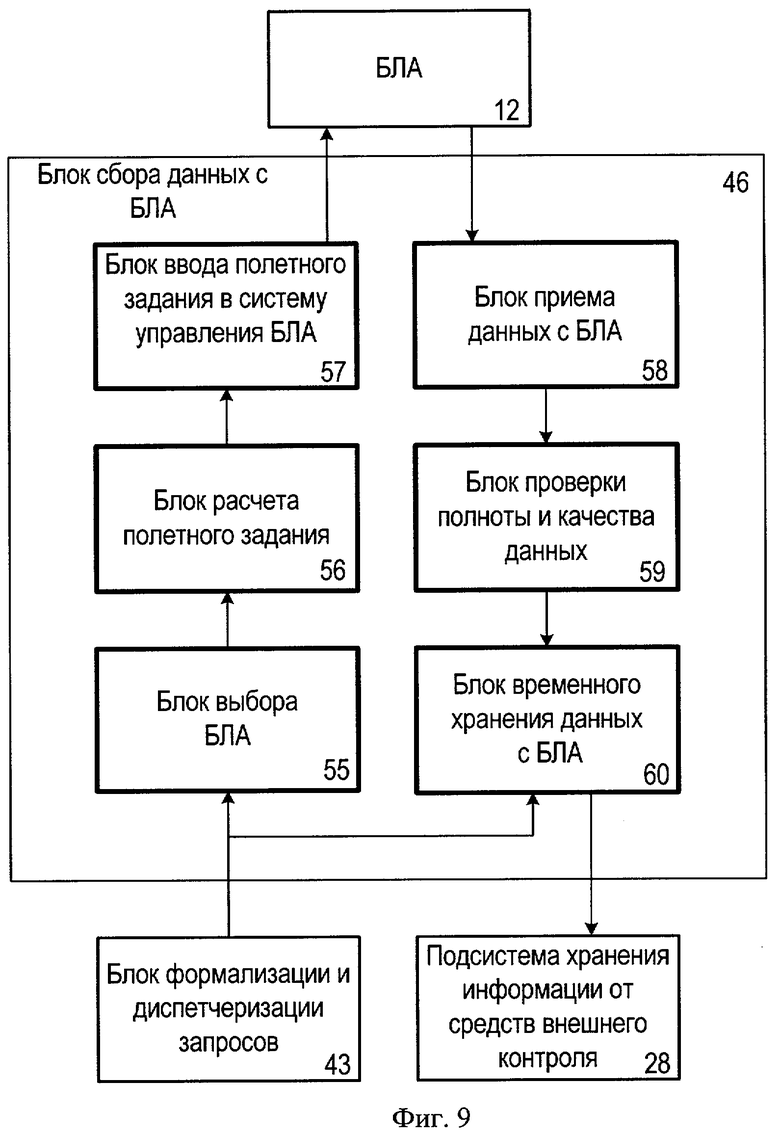
Алгоритм работы блока сбора данных с БЛА следующий. По результатам анализа поставленной задачи с блока формализации и диспетчеризации запросов выдаются требования к БЛА и к устанавливаемому на нем целевому оборудованию, выполняется подбор БЛА, удовлетворяющий требованиям. Для выбранного БЛА формируется полетное задание для системы управления БЛА в виде файла установленного формата, обеспечивающего программирование системы автопилотирования БЛА. Из массива точек стартов БЛА выбирается точка, оптимальная для решения данной задачи. С этой точки выполняется полет БЛА в автоматическом режиме по заданной программе и съемка заданного района. Данные, полученные во время полета, поступают на блок приема данных, полнота и качество проверяются на соответствие запросу и сохраняются в блоке временного хранения данных, а затем передаются в подсистему хранения информации от средств внешнего контроля.
Изобретение обеспечивает гарантированное обновление данных о текущих характеристиках участков сельскохозяйственных угодий в соответствии с циклограммой работы блока коррекции математической модели, а также дает возможность проводить внеплановые оперативные сеансы сбора информации от средств внешнего контроля по командам подсистемы принятия решений.
Предлагаемое изобретение поясняется чертежами, где на фиг.1 показана общая структурная схема системы информационного обслуживания агропромышленного комплекса (дистанционные связи между автоматизированными рабочими местами показаны условно без привязки к конкретным задачам); на фиг.2 - структура блока автоматизированного контроля отдельных участков сельскохозяйственных угодий; на фиг.3 - структурная схема автоматизированного рабочего места (АРМ) на сельскохозяйственной машине; на фиг.4 - структурная схема головного автоматизированного рабочего места (АРМ); на фиг.5 - структурная схема подсистемы принятия решения; на фиг.6 - структурная схема подсистемы коррекции математической модели, на фиг.7 - структурная схема подсистемы управления сбором информации от внешних средств контроля; на фиг.8 - структурная схема блока сбора данных ДЗЗ; на фиг.9 - структурная схема блока сбора данных с БЛА.
По структуре система информационного обслуживания агропромышленного комплекса соответствует разветвленной структуре предприятия. Агропромышленный комплекс включает в себя "k" отдельных участков 1 сельскохозяйственных угодий (поля, луга, пастбища т.д.), для обработки которых используются "n" сельскохозяйственных машин 2 (трактора с прицепными орудиями, сенокосилки, комбайны и другая техника), а также "m" неподвижных производственных объектов 3 (склады, элеватор, механические мастерские, весовая и т.д.). В управлении агропромышленным комплексом участвуют "g" главных специалистов (главный агроном, главный инженер, главный энергетик и т.д.), включая руководителя предприятия, которые могут работать как со стационарных центров 4 управления (офис главного специалиста), так и с мобильных центров управления 5, расположенных либо в автомобилях, либо в иных средствах перемещения, и центральном офисе 6 (головной центр управления). Агропромышленный комплекс имеет собственную телекоммуникационную локальную сеть с расположенной в центральном офисе головной станцией с приемопередающими устройствами 7. В целях управления предприятием используются внешние информационные средства, включая космические средства - метеорологические КА 8, КА ГСП ГЛОНАСС/GPS 9, КА ДЗЗ 10, средства воздушной разведки и аэросъемки - ПЛА 11 и БЛА 12, а также средства наземных измерений 13 (местные метеостанции, оборудование для агрохимического обследования почв и др.).
В предложенной системе информационного обслуживания сельскохозяйственного предприятия каждая ячейка агропромышленного комплекса представлена отдельным звеном (АРМ или блоком автоматизированного контроля).
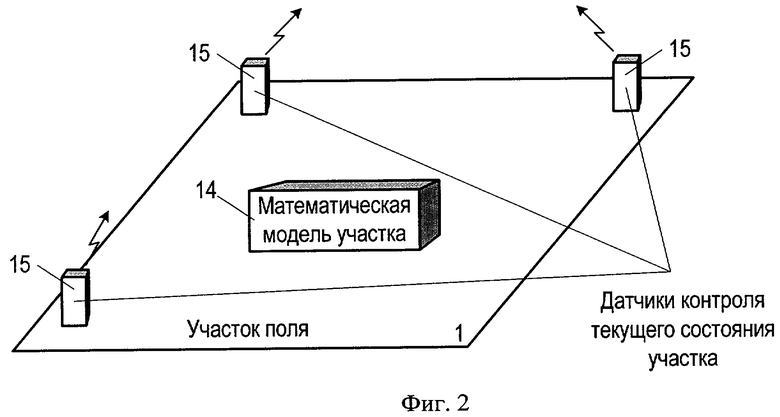
Каждый участок 1 сельскохозяйственных угодий (см. фиг.2) представлен блоком автоматизированного контроля, включающим в себя математическую модель 14 контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики 15 текущего состояния контролируемого участка сельскохозяйственных угодий. Математическая модель 14 записывается на машиночитаемом носителе, например, оптическом диске, и включает в себя сведения о расположении, границах и рельефе участка, сведения о высеянных на участках культурах, агротехнике их возделывания и текущем состоянии посевов. Датчики 14 собирают текущую информацию об участке (влажность, температура, осадки и т.п.) и передают их на антенну 7.
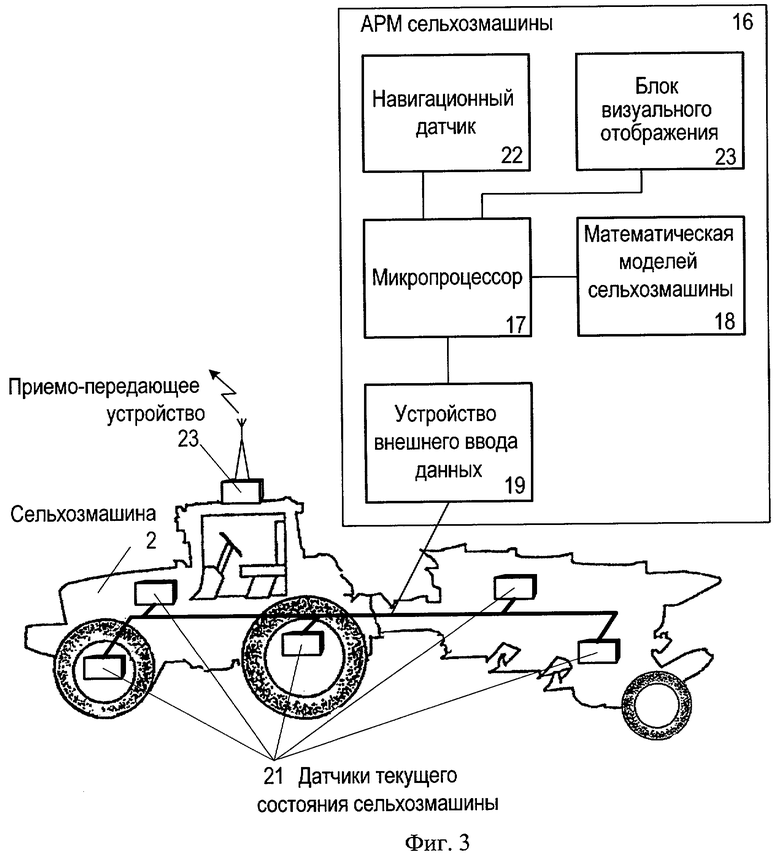
Каждая сельскохозяйственная машина 2 оснащена собственным АРМ 16 (см. фиг.3), включающим в себя микропроцессор 17, с заложенной в него математической моделью 18 сельскохозяйственной машины, устройство для внешнего ввода данных 19, блок визуального отображения данных 20 и подключенные к микропроцессору датчики 21 текущего состояния сельскохозяйственной машины 2 и прицепного орудия. В состав АРМ 16 входит также средство связи 22 с навигационной спутниковой системой точного позиционирования (навигационный датчик) и приемопередающее устройство 23, входящее в состав телекоммуникационной локальной сети. АРМ неподвижных производственных объектов и АРМ сельскохозяйственных машин дистанционно связаны с АРМ главных специалистов 4 и 5, которые, в свою очередь, связаны с головным АРМ 6 управления предприятием. При необходимости головное АРМ 6 может также получать информацию непосредственно с датчиков 15 контроля текущего состояния участков 1 сельскохозяйственных угодий и любую информацию с АРМ неподвижных производственных объектов и АРМ 16 сельскохозяйственных машин.
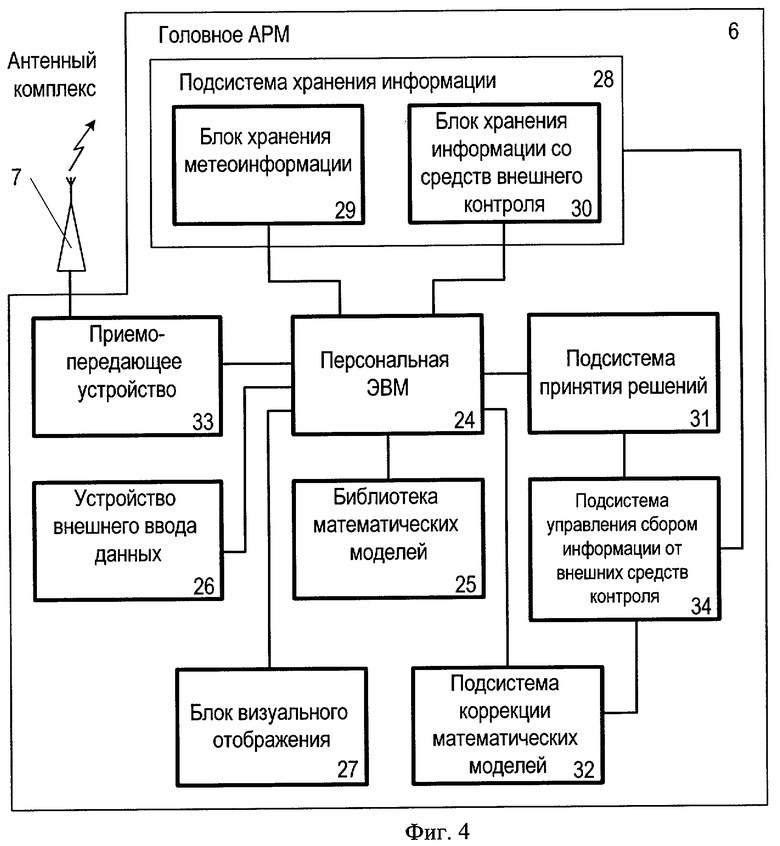
Головное АРМ 6 управления предприятием (см. фиг.4) включает в себя персональную ЭВМ 24 с заложенной в нее библиотекой 25 математических моделей, описывающих весь парк сельскохозяйственных машин 2, все неподвижные производственные объекты 3 предприятия и все участки 1 сельскохозяйственных угодий, устройство 26 для внешнего ввода данных, блок 27 визуального отображения данных, внешнее запоминающее устройство 28, включающее блок 29 хранения метеорологической информации местных метеостанций и метеоспутников и блок 30 хранения информации от средств внешнего контроля сельскохозяйственных машин, неподвижных производственных объектов и участков сельскохозяйственных угодий. Головное АРМ 6 оснащено также подсистемой 31 принятия решения коллегией главных специалистов методом голосования, подсистемой 32 коррекции математических моделей отдельных участков 1 сельскохозяйственных угодий и приемопередающим устройством 33 с антенной 7, входящими в состав телекоммуникационной локальной сети. Подсистема 31 и подсистема 32 управляют работой подсистемы 34 управления сбором информации от внешних средств контроля.
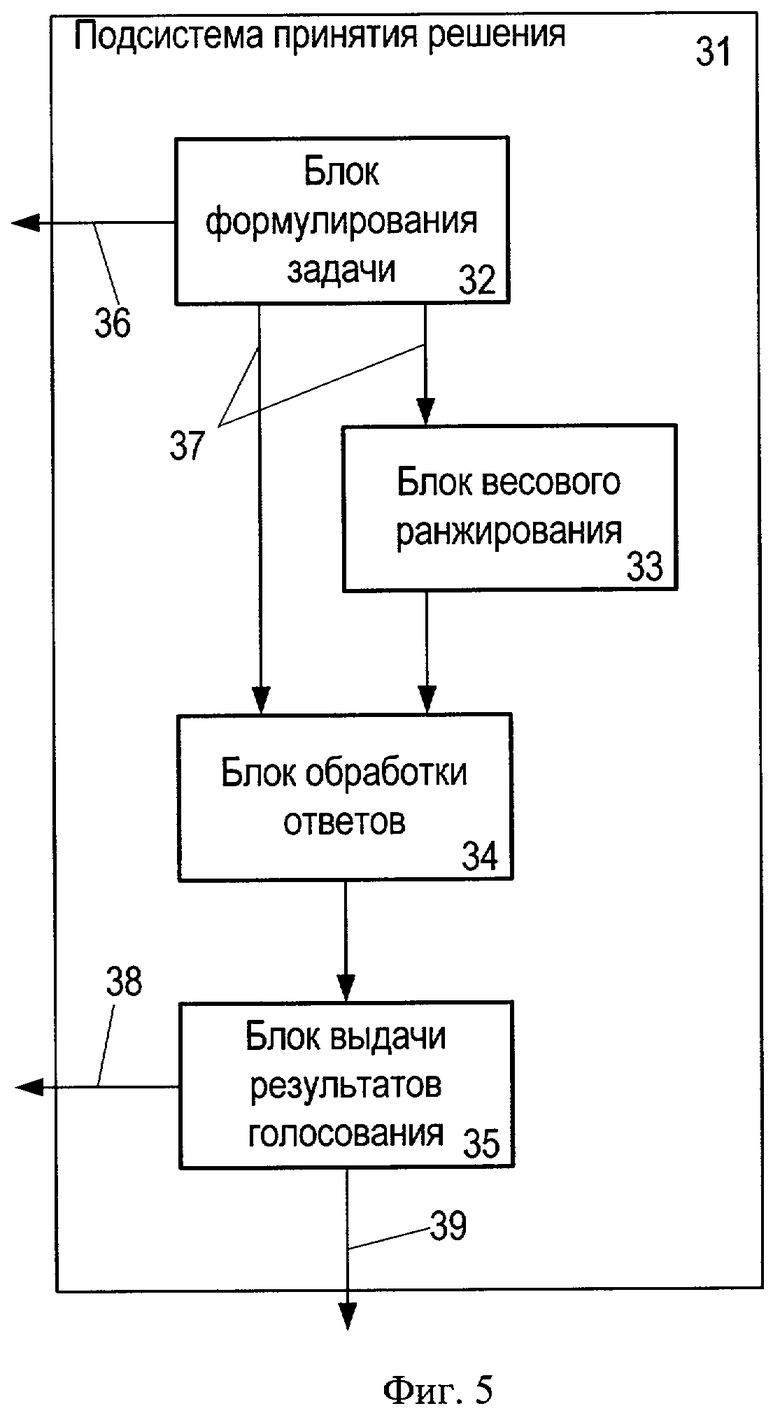
Подсистема 31 принятия решения коллегией главных специалистов методом голосования (см. фиг.5) включает в себя входной блок 32 формулирования задачи, блок 33 весового ранжирования ответов главных специалистов, блок 34 обработки ответов главных специалистов и блок 35 выдачи результатов голосования. Блок 32 формулирования задачи имеет информационные выходы 36 для передачи формулировки задачи на АРМ главных специалистов и информационные выходы 37, подключенные к входу блока 33 весового ранжирования и первому входу блока 34 обработки ответов главных специалистов. Выход блока 33 ранжирования соединен со вторым входом блока 34 обработки ответов главных специалистов, выход которого подключен к входу блока 35 выдачи результатов голосования. Блок 35 выдачи результатов голосования имеет информационные выходы 38 для передачи результатов голосования на АРМ главных специалистов и в подсистему 32 коррекции математических моделей отдельных участков сельскохозяйственных угодий и информационный выход 39 для передачи результатов голосования на блок 27 визуального отображения головного АРМ 6.
Подсистема 32 коррекции математических моделей отдельных участков сельскохозяйственных угодий (см. фиг.6) включает в себя последовательно соединенные блок 40 сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными характеристиками математической модели, блок 41 ранжирования отличий и блок 42 коррекции математической модели, при этом подсистема 28 хранения информации от средств внешнего контроля, приемопередающее устройство 33 и библиотека 25 математических моделей соединены с блоком 40 сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными данными математической модели, а выход блока 42 коррекции математической модели соединен с библиотекой 25 математических моделей. Дополнительно блок 41 ранжирования отличий соединен с блоком 42 коррекции математической модели через подсистему 31 принятия решения коллегией главных специалистов.
Подсистема управления сбором информации от внешних средств контроля 34 (см. фиг.7) включает в себя блок формализации и диспетчеризации запросов 43, соединенный с источниками данных - метеорологических КА 8, КА ГСП 9, КА ДЗЗ 10, ПЛА 11, БЛА 12 и СПИ 13 через соответствующие блоки сбора метеоданных 44, данных точного позиционирования 45, данных ДЗЗ 46, данных ПЛА 47, данных БЛА 48, данных СНИ 49. Блоки 44 - 49 соединены с подсистемой хранения информации от средств внешнего контроля 28. Блок формализации и диспетчеризации запросов 44 соединен с подсистемой коррекции математической модели 32 и подсистемой принятия решений 31.
Логика сбора данных, обеспечиваемого блоками 44 - 49, идентична. Отличия обусловлены особенностями получаемой от различных источников информации. На фиг.8 и фиг.9 приведены структурные схемы сбора данных с космических аппаратов и с авиационных летательных аппаратов соответственно.
Блок 46 сбора данных ДЗЗ (см. фиг.8) включает в себя последовательно соединенные блок 50 выбора КА ДЗЗ и блок 51 адаптации запроса, обеспечивающие формирование запроса на получение данных ДЗЗ (по информации, поступающей от блока 43 формализации и диспетчеризации запроса), а также блоки, обеспечивающие получение удовлетворяющих запросу данных: блок 52 приема данных ДЗЗ и блок 53 проверки полноты и качества данных. Удовлетворяющие запросу данные сохраняются в блоке 54 временного хранения данных, а затем по запросу или по мере заполнения памяти блока 54 передаются в подсистему 28 хранения информации от средств внешнего контроля.
Структура блока 48 сбора данных с БЛА представлена на фиг.9. По результатам анализа поставленной задачи с блока 43 формализации и диспетчеризации запросов выдаются требования к БЛА и к устанавливаемому на нем целевому оборудованию. В блоке 55 выбора БЛА выполняется подбор БЛА, удовлетворяющий требованиям. Для выбранного БЛА в блоке 56 расчета полетного задания формируется цифровое полетное задание для системы управления БЛА в виде файла установленного формата. Блок 57 ввода полетного задания в систему управления БЛА обеспечивает программирование системы автопилотирования БЛА. На основании запрограммированного полетного задания БЛА 12 выполняет полет по заданному маршруту и обеспечивает съемку заданного района. Данные, получаемые во время полета, поступают на блок 58 приема данных с БЛА, после этого, после проверки данных на соответствие запросу в блоке 59 проверки полноты и качества данных, сохраняются в блоке 60 временного хранения данных, а затем, по запросу или по мере заполнения памяти блока 60, передаются в подсистему 28 хранения информации от средств внешнего контроля.
Система информационного обслуживания агропромышленного комплекса выполняет несколько функций: сбор информации о текущем состоянии сельскохозяйственных угодий, сельскохозяйственных машин и производственных объектов; хранение собранной информации и математических моделей отдельных участков отдельных участков сельскохозяйственных угодий и других ячеек агропромышленного комплекса; передачу информации на автоматизированные рабочие места; информационное обслуживание АРМ сельскохозяйственных машин, АРМ неподвижных производственных объектов и АРМ главных специалистов и руководителя предприятия, в том числе при принятии ими коллегиальных решений.
При сборе информации о текущем состоянии сельскохозяйственных угодий, сельскохозяйственных машин и производственных объектов используется информация с датчиков 15 и 21, а также данные от средств внешнего контроля, включая данные с космических источников информации, данные аэросъемки и спектральных измерений с пилотируемых и беспилотных летательных аппаратов, результаты визуальных наблюдений и наземных измерений.
При этом процесс получения информации - управляемый: с заданной периодичностью из системы коррекции математических моделей 32 в подсистему 34 управления сбором информации от внешних средств контроля поступают запросы на обновление данных. Эти запросы формируются в блоке формализации и диспетчеризации запросов 43, где они преобразуются в стандартные формы автоматизированных запросов на данные метео-, точного позиционирования, космических ДЗЗ и пилотируемых ЛА, а затем диспетчеризуются в блоке 43 и через соответствующие блоки 44, 45, 46 и 47 поступают на КА и ЛА. Формализованный запрос на информацию с БЛА (цифровая фото-, видео- и тепловизионная съемка, спектральные и гиперспектральные измерения и т.д.) преобразуется в цифровое полетное задание для системы управления БЛА (2- или 3- мерное описание координат опорных точек маршрута полета БЛА, интервалы времени и режимы работы установленной на БЛА аппаратуры наблюдения, требования к порядку записи и/или непосредственной передачи информации внешнего контроля на пункт управления БЛА и др.). Затем в блоке 48 это полетное задание переносится по проводному либо беспроводному каналу связи в систему управления БЛА, далее по запрограммированному полетному заданию осуществляется полет БЛА.
В случае экстренной ситуации, по решению, принятому в подсистеме 31, запрос в блок 43 может поступить непосредственно из блока 29, независимо от периодичности работы блока 31. После регистрации соответствующих данных КА, ПЛА и БЛА они поступают в блоки 44 - 49, где проходят проверку полноты и качества, т.е. соответствия запросам, и сохраняются в блоках временного хранения данных, из которых передаются на постоянное хранение в подсистему хранения информации от средств внешнего контроля 28.
Вся информация хранится в блоках 29 и 30 внешнего запоминающего устройства 28. Частично информация также хранится в микропроцессорах 17 и персональных компьютерах АРМ главных специалистов. Это позволяет полностью отслеживать ситуационную динамику агропромышленного комплекса. Обмен информацией о текущем состоянии сельскохозяйственных угодий, сельскохозяйственных машин и производственных объектов осуществляется с помощью телекоммуникационной локальной сети. В данной заявке не рассматриваются проблемы защиты информации от несанкционированного доступа.
Система позволяет главным специалистам и руководству предприятия оперативно реагировать на изменение текущей обстановки на отдельных участках сельскохозяйственных угодий и учитывать происшедшие изменения в дальнейшей работе. Например, весной с датчиков 15 и геоинформационных спутников 10 на головное рабочее место 6 поступает информация о конкретном состоянии посевов на каждом из участков, дающая возможность оценить состояние посевов после зимовки запасы влаги на каждом поле. Полученные данные сравниваются в блоке 40 с исходными данными, записанными в математической модели соответствующего участка, например, сравнивается заложенный в математическую модель уровень повреждения посевов морозами с реальными данными, по фотографиям, переданным геоинформационным спутником 10. Результаты сравнения передаются в блок 41 ранжирования отличий и, если уровень повреждения укладывается в допустимые пределы, результаты сравнения передаются в блок 42 коррекции математической модели, и вносятся изменения в математическую модель участка, например в прогнозируемый уровень урожая на данном участке. В противном случае для принятия решения результаты сравнения передаются в подсистему 31 принятия решения, чтобы получить мнение главных специалистов. Главные специалисты могут принять решение - оставить все как есть, пересеять часть анализируемого участка или весь участок или вывести участок из сельскохозяйственного оборота на определенный период времени. Принятое решение передается в блок коррекции математической модели и соответствующие изменения вносятся в математическую модель участка сельскохозяйственных угодий. Скорректированная математическая модель используется для последующего уточнения графика работ на данном участке.
Введенная в систему согласно данному изобретению подсистема 34 позволяет гарантированно получать оперативную информацию о состоянии почв и посевов с КА, ПЛА и БЛА. В частности, при необходимости принятия оперативных решений о состоянии определенных участков полей в течение единиц часов либо даже минут может быть сформировано и заложено в систему управления полетное задание, выполнен полет БЛА, также занимающий в данном случае несколько минут, принято решение о дифференцированной обработке (например, средствами защиты растений и др.) с изменением вносимой дозы коррелированно с данными обследования, полученными аппаратурой наблюдения, установленной на БЛА. Здесь рассмотрен один случай, но понятно, что возможности системы информационного обслуживания не ограничиваются данным примером.
Информационное обслуживание АРМ 16 сельскохозяйственной машины 2 связано с проведением каких-либо работ на отдельном участке 1 сельскохозяйственных угодий. Из библиотеки 25 математических моделей получают скорректированную математическую модель участка сельскохозяйственных угодий и выполнят технологические операции в соответствии со скорректированной математической моделью.
Информационное обслуживание главных специалистов и руководителя предприятия заключается в основном в передаче им в режиме реального времени сведений о всех изменениях в ситуационной динамике агропромышленного комплекса с выводом информации на АРМ главных специалистов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2006 |
|
RU2295218C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2004 |
|
RU2251240C1 |
| Индивидуальный диспетчерский тренажер для тренинга оперативно-диспетчерского персонала магистральных нефтепроводов | 2015 |
|
RU2639932C2 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ ПОКАЗАТЕЛЕЙ, ОПРЕДЕЛЯЮЩИХ ТЕХНИЧЕСКОЕ СОСТОЯНИЕ ТРУБОПРОВОДНЫХ СИСТЕМ, И СИСТЕМА МОНИТОРИНГА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767263C1 |
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ СИЛАМИ И СРЕДСТВАМИ | 2014 |
|
RU2560196C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ И ОПЕРАТИВНОГО КОНТРОЛЯ (МОНИТОРИНГА) КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ И ТЕРРИТОРИЙ СОЮЗНОГО ГОСУДАРСТВА "РОССИЯ-БЕЛАРУСЬ" | 2006 |
|
RU2338233C2 |
| СПОСОБ ПОСТРОЕНИЯ ЕДИНОГО ИНФОРМАЦИОННОГО ПРОСТРАНСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2656841C2 |
| СИСТЕМА БЕЗОПАСНОГО МОНИТОРИНГА И ДИАГНОСТИКИ СИСТЕМ УПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКОЙ | 2016 |
|
RU2641384C1 |
Изобретение относится к области сельского хозяйства. Система содержит n автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, k блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка и оснащенные передатчиками датчики текущего состояния контролируемого участка, и головное автоматизированное рабочее место управления предприятием. Оно включает приемопередающее устройство, ЭВМ с заложенной в нее библиотекой математических моделей, описывающих весь парк сельскохозяйственных машин, и все участки сельскохозяйственных угодий, устройство для внешнего ввода данных, блок визуального отображения данных, внешнее запоминающее устройство, включающее блок хранения метеорологической информации местных метеостанций и метеоспутников, блок хранения информации от средств внешнего контроля сельскохозяйственных машин и участков, подсистему принятия решения коллегией главных специалистов и подсистему коррекции математических моделей отдельных участков, включающую в себя последовательно соединенные блок сравнения текущих характеристик отдельного участка с исходными характеристиками математической модели, блок ранжирования отличий и блок коррекции математической модели. При этом блок хранения информации от средств внешнего контроля, приемопередающее устройство и библиотека математических моделей соединены с блоком сравнения текущих характеристик отдельного участка угодий с исходными данными математической модели. Выход блока коррекции математической модели соединен с библиотекой математических моделей. Автоматизированные рабочие места сельскохозяйственных машин и блоки автоматизированного контроля отдельных участков угодий дистанционно связаны с автоматизированным рабочим местом управления предприятием. Подсистема коррекции математических моделей отдельных участков сельскохозяйственных угодий связана с блоком хранения информации от средств внешнего наблюдения, библиотекой математических моделей и приемопередающим устройством. Блок ранжирования отличий дополнительно соединен с блоком коррекции математической модели через подсистему принятия решения коллегией главных специалистов. При этом головное автоматизированное рабочее место управления предприятием оснащено подсистемой управления сбором информации от внешних средств контроля. Система обеспечивает принятие управленческих решений на основе своевременной и полной зарегистрированной информации от средств внешнего контроля. 2 з.п. ф-лы, 9 ил.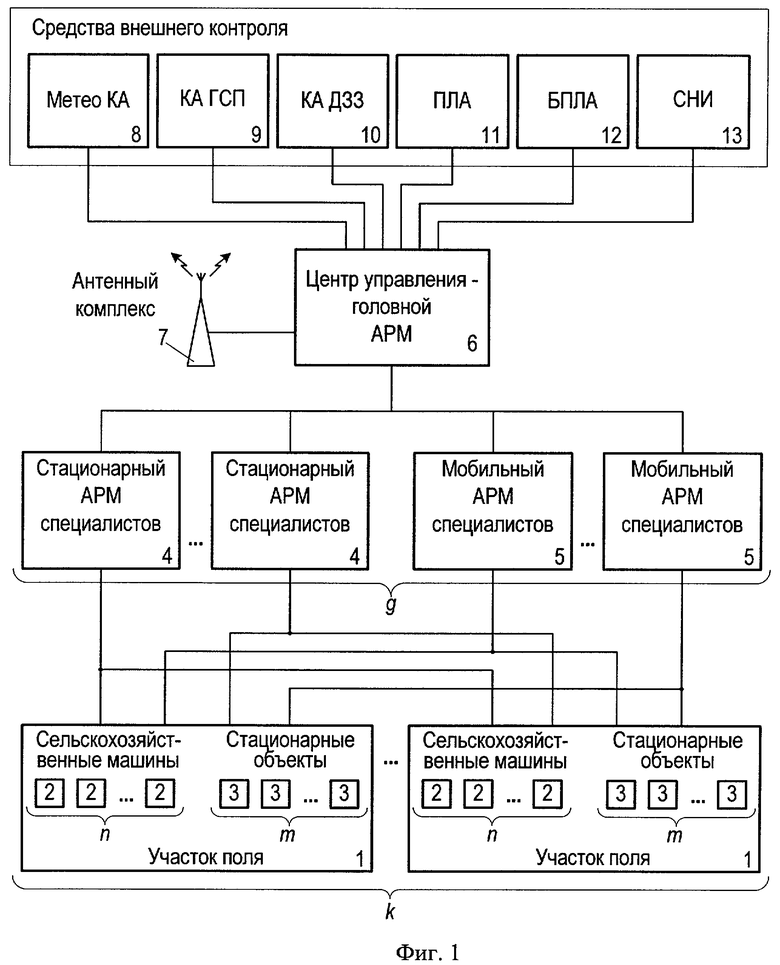
1. Система информационного обслуживания сельскохозяйственного предприятия, использующего технологию точного земледелия, содержащая n автоматизированных рабочих мест на сельскохозяйственных машинах, каждое из которых включает в себя микропроцессор с заложенной в него математической моделью сельскохозяйственной машины, средство связи с навигационной спутниковой системой точного позиционирования и приемопередающее устройство, k блоков автоматизированного контроля отдельных участков сельскохозяйственных угодий, каждый из которых включает в себя математическую модель контролируемого участка сельскохозяйственных угодий и оснащенные передатчиками датчики текущего состояния контролируемого участка сельскохозяйственных угодий, и головное автоматизированное рабочее место управления предприятием, включающее в себя приемопередающее устройство, ЭВМ с заложенной в нее библиотекой математических моделей, описывающих весь парк сельскохозяйственных машин и все участки сельскохозяйственных угодий, устройство для внешнего ввода данных, блок визуального отображения данных, внешнее запоминающее устройство, включающее блок хранения метеорологической информации местных метеостанций и метеоспутников, блок хранения информации от средств внешнего контроля сельскохозяйственных машин и участков сельскохозяйственных угодий, подсистему принятия решения коллегией главных специалистов и подсистему коррекции математических моделей отдельных участков сельскохозяйственных угодий, включающую в себя последовательно соединенные блок сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными характеристиками математической модели, блок ранжирования отличий и блок коррекции математической модели, при этом блок хранения информации от средств внешнего контроля, приемопередающее устройство и библиотека математических моделей соединены с блоком сравнения текущих характеристик отдельного участка сельскохозяйственных угодий с исходными данными математической модели, а выход блока коррекции математической модели соединен с библиотекой математических моделей, при этом автоматизированные рабочие места сельскохозяйственных машин и блоки автоматизированного контроля отдельных участков сельскохозяйственных угодий дистанционно связаны с автоматизированным рабочим местом управления предприятием, подсистема коррекции математических моделей отдельных участков сельскохозяйственных угодий связана с блоком хранения информации от средств внешнего наблюдения, библиотекой математических моделей и приемопередающим устройством, а блок ранжирования отличий дополнительно соединен с блоком коррекции математической модели через подсистему принятия решения коллегией главных специалистов, отличающаяся тем, что головное автоматизированное рабочее место управления предприятием оснащено подсистемой управления сбором информации от внешних средств контроля.
2. Система по п.1, отличающаяся тем, что подсистема управления сбором информации от внешних средств контроля включает в себя блок формализации и диспетчеризации запросов, соединенный с источниками данных - метеорологических космических аппаратов (КА), КА глобальной системы позиционирования (ГСП), КА дистанционного зондирования Земли (ДЗЗ), пилотируемых летательных аппаратов (ПЛА), беспилотных летательных аппаратов (БЛА), средств наземных измерений (СНИ) через соответственно блок сбора метеоданных, блок сбора данных точного позиционирования, блок сбора данных ДЗЗ, блок сбора данных ПЛА, блок сбора данных БЛА, блок сбора данных СНИ; указанные блоки сбора данных соединены с подсистемой хранения информации от средств внешнего контроля, при этом осуществляется информационный обмен блока формализации и диспетчеризации запросов с подсистемой коррекции математической модели и подсистемой принятия решений.
3. Система по п.2, отличающаяся тем, что в блок сбора данных с БЛА по результатам анализа поставленной задачи с блока формализации и диспетчеризации запросов выдаются требования к БЛА и к устанавливаемому на нем целевому оборудованию; в блоке выбора БЛА выполняется подбор БЛА, удовлетворяющий требованиям: для выбранного БЛА в блоке расчета полетного задания формируется цифровое полетное задание для системы управления БЛА в виде файла установленного формата; блок ввода полетного задания в систему управления БЛА обеспечивает программирование системы автопилотирования БЛА; на основании запрограммированного полетного задания БЛА выполняет полет по заданному маршруту и обеспечивает съемку заданного района; данные, получаемые во время полета, поступают на блок приема данных с БЛА, проверяются на соответствие запросу в блоке проверки полноты и качества данных, в случае положительного результата проверки сохраняются в блоке временного хранения данных, а затем по запросу или по мере заполнения памяти блока передаются в подсистему хранения информации от средств внешнего контроля.
| СИСТЕМА ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕДПРИЯТИЯ, ИСПОЛЬЗУЮЩЕГО ТЕХНОЛОГИЮ ТОЧНОГО ЗЕМЛЕДЕЛИЯ | 2004 |
|
RU2251240C1 |
| US 6199000 В1, 06.03.2001 | |||
| DE 4442171 А1, 13.06.1996. | |||

