Изобретение относится к системам электродвижения переменного тока автономных объектов на базе двигателя внутреннего сгорания (ДВС) (дизельного, бензинового или газового) и генератора переменного тока (синхронного или асинхронного) и предназначено для питания тягового электродвигателя переменного тока (синхронного или асинхронного), работающего с переменной частотой вращения, а также для обеспечения потребителей бортовой сети автономного объекта электроэнергией со стабилизированными параметрами частоты и амплитуды переменного напряжения, или стабилизированным постоянным напряжением, и может быть использовано в автомобилестроении, локомотивостроении, судостроении.
Известна система электродвижения автономного объекта, содержащая синхронный генератор с несколькими m-фазными обмотками статора, приводимый во вращение первичным двигателем (ДВС), и асинхронные двигатели, подключенные к генератору (авторское свидетельство СССР №691320, кл. B60L 11/08, 1976). Недостатком электропередачи является ступенчатое регулирование частоты вращения двигателей и низкий КПД (высокое потребление топлива) вследствие того, что первичный двигатель (ДВС) при разных нагрузках работает с постоянной частотой вращения.
Наиболее близкой по техническому решению является система электродвижения автономного объекта (Патент РФ №2093378. МПК B60L 11/08, 1995), содержащая генератор переменного тока, ротор которого, несущий обмотку возбуждения, кинематически связан с первичным двигателем (ДВС), трехфазный электродвигатель переменного тока, статорные обмотки которого подключены через преобразователь частоты к статорным обмоткам генератора переменного тока. Данное устройство позволяет плавно регулировать частоту вращения электродвигателя. Недостатком устройства является низкий КПД (высокое потребление топлива) вследствие того, что ДВС при разных нагрузках работает с постоянной частотой вращения.
Решаемая задача - создание системы электродвижения автономного объекта на базе ДВС переменной частоты вращения.
Техническим результатом предлагаемого изобретения является снижение потребления топлива ДВС системы электродвижения автономного объекта путем выбора оптимальной частоты вращения вала ДВС, соответствующей мощности его нагрузки, при условии обеспечения требуемой частоты вращения тягового электродвигателя переменного тока, а также обеспечение потребителей бортовой сети автономного объекта электроэнергией со стабилизированными параметрами частоты и амплитуды переменного напряжения или стабилизированным постоянным напряжением.
Этот технический результат достигается тем, что в системе электродвижения автономного объекта, содержащей последовательно соединенные ДВС, генератор переменного тока, преобразователь частоты, питающий тяговый электродвигатель переменного тока, применяется ДВС с переменной частотой вращения; к выходу генератора переменного тока подключен преобразователь частоты для питания потребителей бортовой сети автономного объекта, поддерживающий на выходных выводах на заданном уровне частоту и амплитуду переменного напряжения, либо значение постоянного напряжения; к ДВС подключен блок формирования оптимальной частоты вращения вала ДВС, к входу которого подключен блок вычисления мощности нагрузки, соединенный с выходами датчиков тока и напряжения на выходе преобразователей частоты; к преобразователям частоты подключены блоки стабилизации амплитуды напряжения, соединенные с выходами датчиков напряжения на выходе преобразователей частоты; блок стабилизации амплитуды напряжения преобразователя частоты, питающего тяговый электродвигатель переменного тока, соединен с выходом задатчика частоты вращения тягового электродвигателя переменного тока, входящего в состав блока стабилизации частоты вращения тягового электродвигателя переменного тока, в состав которого также входят регулятор частоты вращения тягового электродвигателя переменного тока и сумматор сигналов, на вход которого поступает сигнал с датчика частоты вращения тягового электродвигателя переменного тока; выход блока стабилизации частоты вращения тягового электродвигателя переменного тока подключен к преобразователю частоты, питающему тяговый электродвигатель переменного тока; к входу преобразователя частоты, питающему потребители бортовой сети автономного объекта, подключен задатчик частоты выходного напряжения.
Преобразователь частоты, питающий тяговый электродвигатель переменного тока, и преобразователь частоты, питающий потребители бортовой сети автономного объекта, могут содержать трансформаторы.
Применение ДВС переменной частоты вращения, подключение к выходу генератора переменного тока преобразователя частоты, поддерживающего на выходных выводах на заданном уровне частоту и амплитуду переменного напряжения либо значение постоянного напряжения; подключение к ДВС блока формирования оптимальной частоты вращения вала ДВС, к входу которого подключен блок вычисления мощности нагрузки, соединенный с выходами датчиков тока и напряжения на выходе преобразователей частоты; подключение к преобразователям частоты блоков стабилизации амплитуды напряжения, соединенных с выходами датчиков напряжения на выходе преобразователей частоты; соединение блока стабилизации амплитуды напряжения преобразователя частоты, питающего тяговый электродвигатель переменного тока, с выходом задатчика частоты вращения тягового электродвигателя переменного тока, входящего в состав блока стабилизации частоты вращения тягового электродвигателя переменного тока, выход которого подключен к преобразователю частоты, питающему тяговый электродвигатель переменного тока, а вход подключен к датчику частоты вращения тягового электродвигателя переменного тока; подключение блока задатчика частоты напряжения к входу преобразователя частоты, питающему потребители бортовой сети автономного объекта, выгодно отличает предлагаемое устройство от известного, так как обеспечивает экономию топлива при условии обеспечения требуемой частоты вращения тягового электродвигателя переменного тока и обеспечения потребителей бортовой сети автономного объекта электроэнергией со стабилизированными параметрами частоты и амплитуды переменного напряжения, или стабилизированным постоянным напряжением.
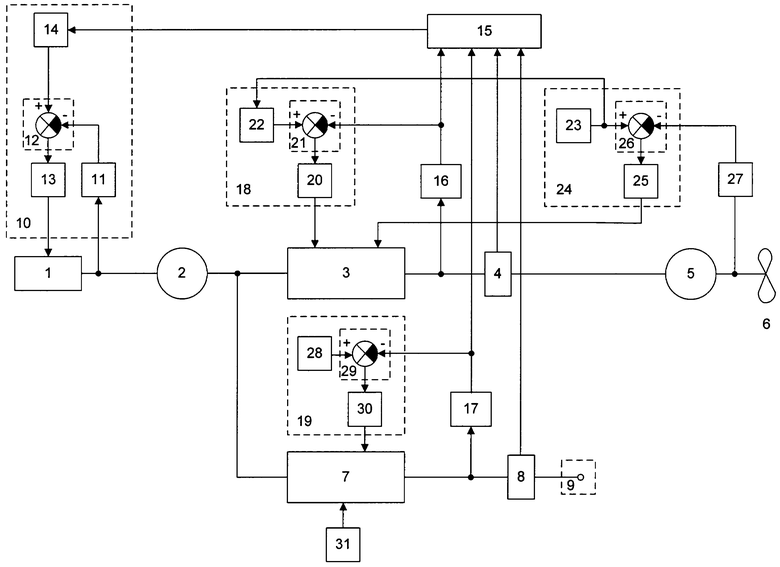
Сущность изобретения поясняется чертежом, где показана функциональная схема устройства.
Система электродвижения автономного объекта содержит последовательно соединенные ДВС 1 переменной частоты вращения, генератор 2 переменного тока, преобразователь частоты 3, датчик тока 4, тяговый электродвигатель 5 переменного тока, гребной винт (колесо или колесную пару) 6; к выходу генератора 2 переменного тока также последовательно подключены преобразователь частоты 7, датчик тока 8, выходные выводы 9. К входу ДВС 1 подключен блок 10 формирования оптимальной частоты вращения вала ДВС 1, содержащий датчик 11 частоты вращения вала ДВС 1, сумматор сигналов 12, регулятор 13 частоты вращения вала ДВС 1, блок 14 задания экономичной частоты вращения вала ДВС 1, к входу которого подключен блок 15 вычисления мощности нагрузки, соединенный с выходами датчиков тока 4, 8 и датчиков напряжения 16, 17 на выходе преобразователей частоты 3, 7. К входам преобразователей частоты 3, 7 подключены блоки 18, 19 стабилизации амплитуды напряжения. Блок 18 стабилизации амплитуды напряжения, состоящий из регулятора напряжения 20, сумматора сигналов 21 и задатчика 22 амплитуды напряжения, соединен с выходом датчика напряжения 16 и выходом задатчика 23 частоты вращения электродвигателя 5, входящего в состав блока 24 стабилизации частоты вращения электродвигателя 5, в состав которого также входят регулятор частоты вращения 25 электродвигателя 5 и сумматор сигналов 26. На вход блока 24 стабилизации частоты вращения поступает сигнал с датчика частоты вращения 27 гребного (тягового) электродвигателя переменного тока 5. Выход регулятора частоты вращения 25 подключен к входу преобразователя частоты 3. Блок 19 стабилизации амплитуды напряжения состоит из задатчика 28 амплитуды напряжения, сумматора сигналов 29 и регулятора напряжения 30. Вход блока 19 стабилизации напряжения подключен к выходу датчика напряжения 17. Выход задатчика 31 частоты выходного напряжения соединен с преобразователем частоты 7.
Устройство работает следующим образом.
Блок 10 формирования оптимальной частоты вращения вала ДВС 1 получает сигнал с блока вычисления мощности нагрузки 15, который соединен с выходами датчиков тока 4, 8 и датчиков напряжения 16, 17 на выходе преобразователей частоты 3, 7. В зависимости от значения мощности нагрузки блок 14 задания экономичной частоты вращения вала ДВС 1, в программу работы которого заложены оптимальные зависимости частоты вращения вала ДВС 1 от мощности нагрузки, соответствующие минимальному расходу топлива, задает оптимальную частоту вращения вала ДВС 1. С помощью сумматора сигналов 12 вычисляется разность сигнала задания оптимальной частоты вращения вала ДВС 1 от блока 14 и сигнала датчика 11 частоты вращения вала ДВС 1. Сигнал от сумматора 12 поступает на вход регулятора 13 частоты вращения вала ДВС 1, который поддерживает частоту вращения вала ДВС 1 на уровне, заданном блоком 14. Таким образом, при изменении мощности нагрузки на выходных выводах 9 и при изменении частоты вращения гребного винта, колеса или колесной пары 6, а следовательно, и мощности, потребляемой электродвигателем 5, частота вращения вала ДВС 1 будет поддерживаться оптимальной с точки зрения минимального потребления топлива.
Поскольку частота вращения вала ДВС 1 будет изменяться в зависимости от частоты вращения гребного винта, колеса или колесной пары 6 и мощности нагрузки на выходных выводах 9, то амплитуда и частота напряжения генератора переменного тока 2 будут также изменяться.
Для вращения гребного винта, колеса или колесной пары 6 с требуемой частотой вращения необходимо поддерживать на определенном уровне частоту и амплитуду выходного синусоидального напряжения преобразователя частоты 3, питающего электродвигатель 5.
Стабилизация амплитуды и частоты переменного напряжения на входе электродвигателя 5 в зависимости от заданной частоты его вращения осуществляется следующим образом.
Преобразователь частоты 3, питающий электродвигатель 5, преобразует выходное напряжение генератора 2 переменной амплитуды и частоты в переменное напряжение заданной амплитуды и частоты. На вход преобразователя частоты 3, питающего электродвигатель 5, поступает сигнал от блока 18 стабилизации напряжения, в состав которого входит сумматор сигналов 21, с помощью которого вычисляется разность сигналов от задатчика 22 амплитуды напряжения и датчика напряжения 16, установленного на выходе преобразователя частоты 3. Сигнал от сумматора 21 поступает на вход регулятора напряжения 20, который поддерживает на выходе преобразователя частоты 3 амплитуду переменного напряжения на уровне, задаваемом задатчиком 22 амплитуды напряжения, который вычисляет задание на амплитуду выходного напряжения преобразователя частоты 3 в зависимости от сигнала, поступающего на его вход с задатчика 23 частоты вращения электродвигателя 5.
На вход преобразователя частоты 3 поступает сигнал от блока 24 стабилизации частоты вращения электродвигателя 5, в состав которого входит сумматор сигналов 26, вычисляющий разность сигналов от задатчика 23 частоты вращения электродвигателя 5 и датчика частоты вращения 27 электродвигателя 5. Сигнал от сумматора 26 поступает на вход регулятора 25 частоты вращения, который поддерживает на выходе преобразователя частоты 3 частоту переменного напряжения на уровне, задаваемом задатчиком 23 частоты вращения электродвигателя 5.
Стабилизация амплитуды и частоты напряжения на выходных выводах 9, к которым подключаются потребители бортовой сети автономного объекта, на заданном уровне осуществляется следующим образом.
Преобразователь частоты 7 преобразует выходное напряжение генератора 2 переменного тока в переменное напряжение с заданными параметрами амплитуды и частоты либо в постоянное напряжение заданного уровня. На вход преобразователя частоты 7 поступает сигнал от блока 19 стабилизации амплитуды напряжения, в состав которого входит сумматор сигналов 29, с помощью которого вычисляется разность сигналов от задатчика 28 амплитуды напряжения и датчика напряжения 17 на выходе преобразователя частоты 7. Сигнал от сумматора 29 поступает на вход регулятора напряжения 30, который поддерживает на выходных выводах 9 амплитуду переменного напряжения или значение постоянного напряжения на уровне, задаваемом задатчиком 28 амплитуды напряжения.
Частота выходного напряжения на выходных выводах 9 при изменении частоты вращения вала ДВС 1 поддерживается неизменной с помощью преобразователя частоты 7 на уровне, задаваемом блоком 31 задатчика частоты выходного напряжения. В частном случае частота напряжения на выходных выводах 9 может быть равна нулю. При этом на выходных выводах 9 формируется постоянное напряжение, значение которого стабилизируется на уровне, определяемом задатчиком 28 амплитуды напряжения.
С точки зрения топливной экономичности при изменении мощности нагрузки частоту вращения вала ДВС 1 следует менять в широких пределах, при этом минимальная частота вращения вала может в несколько раз отличаться от номинальной частоты [Алешков О.А. Повышение топливной экономичности первичного дизеля в составе многофункционального энерготехнологического комплекса оптимизацией скоростного режима: Автореф. дис. … канд. техн. наук. Барнаул, 2009]. Следовательно, и амплитуда выходного синусоидального напряжения генератора 2 переменного тока будет меняться в широком диапазоне, и ее минимальное значение будет в несколько раз меньше номинального значения.
Поэтому для стабилизации амплитуды выходного синусоидального напряжения преобразователей частоты 3, 7 на уровне номинального значения напряжения статора генератора 2 переменного тока в состав преобразователей частоты 3, 7 могут быть включены трансформаторы.
По данным научно-технической и патентной литературы авторам неизвестна заявляемая совокупность признаков, направленная на достижение поставленной задачи, и это решение не вытекает с очевидностью из известного уровня техники, что позволяет сделать вывод о соответствии решения уровню изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система электродвижения автономного объекта | 2017 |
|
RU2666074C1 |
| СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2724214C1 |
| АВТОНОМНАЯ ЭЛЕКТРОСТАНЦИЯ ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2412513C1 |
| Автономная электростанция переменного тока | 2017 |
|
RU2666903C1 |
| СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ АВТОНОМНЫХ ШАХТНЫХ ГОРНО-ТРАНСПОРТНЫХ СРЕДСТВ | 2023 |
|
RU2808304C1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2503580C1 |
| Автономная электростанция переменного тока | 2017 |
|
RU2666782C1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА С АСИНХРОННЫМ СТАРТЕРОМ-ГЕНЕРАТОРОМ | 1997 |
|
RU2173020C2 |
Изобретение относится к электроприводу переменного тока автономных объектов. Система содержит последовательно соединенные ДВС переменной частоты вращения, генератор переменного тока, преобразователь частоты, тяговый электродвигатель переменного тока. К выходу генератора переменного тока подключен преобразователь частоты. К ДВС подключен блок формирования оптимальной частоты вращения вала ДВС. К входу блока формирования оптимальной частоты вала ДВС подключен блок вычисления мощности нагрузки. К преобразователям частоты подключены блоки стабилизации амплитуды напряжения. Блок стабилизации амплитуды напряжения преобразователя частоты соединен с выходом задатчика частоты вращения тягового электродвигателя. Вход блока стабилизации частоты вращения тягового электродвигателя соединен с выходом датчика частоты вращения тягового электродвигателя. К входу преобразователя частоты подключен задатчик частоты выходного напряжения. Технический результат заключается в снижении потребления топлива ДВС, стабилизации параметров амплитуды и частоты переменного напряжения или стабилизированного постоянного напряжения. 2 з.п. ф-лы, 1 ил.
1. Система электродвижения автономного объекта, содержащая последовательно соединенные ДВС, генератор переменного тока, преобразователь частоты, тяговый электродвигатель переменного тока, отличающаяся тем, что в ней использован ДВС переменной частоты вращения, к выходу генератора переменного тока дополнительно подключен преобразователь частоты для питания потребителей бортовой сети автономного объекта, к ДВС подключен блок формирования оптимальной частоты вращения вала ДВС, к входу которого подключен блок вычисления мощности нагрузки, соединенный с выходами датчиков тока и напряжения на выходе преобразователей частоты, к преобразователям частоты подключены блоки стабилизации амплитуды напряжения, соединенные с выходами датчиков выходного напряжения преобразователей частоты, блок стабилизации амплитуды напряжения преобразователя частоты, питающего тяговый электродвигатель, соединен с выходом задатчика частоты вращения тягового электродвигателя, входящего в состав блока стабилизации частоты вращения тягового электродвигателя, выход которого подключен к преобразователю частоты, питающему тяговый электродвигатель, вход блока стабилизации частоты вращения тягового электродвигателя соединен с выходом датчика частоты вращения тягового электродвигателя, к входу преобразователя частоты, питающему потребителей бортовой сети автономного объекта, подключен задатчик частоты выходного напряжения.
2. Система электродвижения автономного объекта по п.1, отличающаяся тем, что преобразователь частоты, питающий тяговый электродвигатель переменного тока, содержит трансформатор.
3. Система электродвижения автономного объекта по п.1, отличающаяся тем, что преобразователь частоты, питающий потребителей бортовой сети автономного объекта, содержит трансформатор.
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2001 |
|
RU2179119C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА АВТОНОМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2346850C2 |
| EP 1892168 A1, 27.02.2008. | |||

