Изобретение относится к электротехнике и может быть исЛтользовано в автоматизированном тяговом электроприводе пневмоколесных, преимущественно землеройно-транспортных Мсшган.
Известен многодвигательный электропривод, содержащий асинхронные электродвигатели, соединенные с источником питания - синхронным генератором, с тяговым выпрямителем, преобразователи частоты с индивидуальными задатчиками частоты, блок автома- тйческого управления частотой и на- . пряжением, датчики тока и напряжения, генератор частоты, регуляторы выравнивания нагрузок, выполненные на сумматорах и блоках выравнивания нагрузок Cl3Недостатком этого многодвигательного асинхронного электродвигателя является его низкая надежность, обусловленная применением индивидуальных преобразователей частоты для каждого асинхронного электродвигателя.
Наиболее близким по технической сущности к изобретению является многодвигательный электропривод, содержащий группы асинхронных электродвигателей, обмотки статоров которых подключены к автономному источнику переменного тока, два блока регулирова.ния частоты вращения, два импульсных регулятора тока, силовой вход каждого из которых через датчик тока и выпрямитель подключен к роторам соответствующей группы асинхронных электродвигателей, дв.а
10 блока выявления ведущего электродвигателя, входы которых подключены к выходам датчиков тока, а выхоли соединены с первыми входами соответствующих блоков регулирования
15 частоты вращения, вторые входы котоЕЯ 1Х соединены с задатчиком частоты вращения, а выходы соединены с управляющими входами соответствующих импульсных регуляторов тока, блок
20 управления,, выход которого связан с третьими входами блоков регулирования частоты вргццения {2.
Недостатком известного устройства является низкая точность установ25ки заданной частоты вращения и поддержания ее на необходимом уровне. Это обусловлено тем, что в случае применения известного многодвигательного асинхронного электропризавода для ягового электропривода
пневмоколесных машин требуемый диапазон регулирования частоты вращения асинхронных электродвигате- , лей с фазным ротором, образующих бортовые группы многодвигательного асинхронного электропривода пневмоколесной машины, может быть обеспечен регулированием частоты питающего ста торы электродвигателей напряжения и регулированием частоты вращения отдельных групп электродвигателей импульсным методом по цепи выпрямленного тока ротора. При изменении же частоты питающего напряжения необходимо изменять и его уровень так, чтобы поддерживался в заданных пределах поток электродвигателей; Это приводит к ухудшению точности процесса стабилизации частоты вращения электродвигателей групп, поскольку сигнал на выходе датчика напряжения, пропорциональный среднему значению выпрямленного напряжения ротора наиболее нагруженного (ведущего) электродвигателя, становится зависимым не только от величины скольжения (частоты вращения), но и от величины напряжения, подводимого к статорам асинхронных электродвигателей с фазным ротором, и, следовательно, при постоянной уставке задатчика частоты вращения действительное значение частоты вращения наиболее нагруженного электродвигателя группы изменяется при изменении напряжения,подводимого к статорам асинхронных электродвигателей.
Таким образом, известный электропривод имеет ограниченные возможности применения в тяговых механизмах. I
Целью изобретения является повышение точности установки и поддержание заданной частоты вращения электропривода.
Указанная цель достигается тем, что в многодвигательный электропривод введены два функциональных блока, датчик поворота механизма и два датчика напряжения обмотки роторов ,электродвигателей, выходы датчиков напряжения подключены к первым входам соответствующих функциональных блоков, другие два входы которых подключены к двум выходам автономно источника переменного тока, а выходы соединены с четвертыми входами соответствующих регуляторов частоты вращения, пятые входы которых соединены с третьим выходом автономного источника переменного тока, одни входы блока управления соединены с выходами датчиков тока, другой вход блока управления соединен с датчиком поворота, четвертый выход автономного источника переменного тока соединен с вторыми управляющими входами импульсных регуляторов тока
силовые выходы которых соединены с силовым входом автономного источника переменного тока.
Автономный источник переменного тока содержит синхронный генератор, тяговый выпрямитель, два блока упраления, датчик напряжения и датчик тока, генератор частоты и инвертор напряжения, силовой вход которого через датчик тока и тяговый выпрямитель соединен с выходом синхронного генератора, управляющий вход которого соединен с одним выходом первого блока управления, второй выход которого соединен с первым выходом автономного источника переменного тока и с входом генератора частоты, один вход первого блока управления соединен с йыходом датчика тока, а другой вход соединен с выходом датчика напряжения тягового выпрямителя и с вторым выходом автономного источника переменного тока, вход датчика напряжения соединен с тяговым выпрямителем, выходы генератора частоты соединены с третьим и четвертым выходами автономного источника переменного тока, управляющий вход инвертора напряжения чере второй блок управления связан с одним из выходов генератора частоты
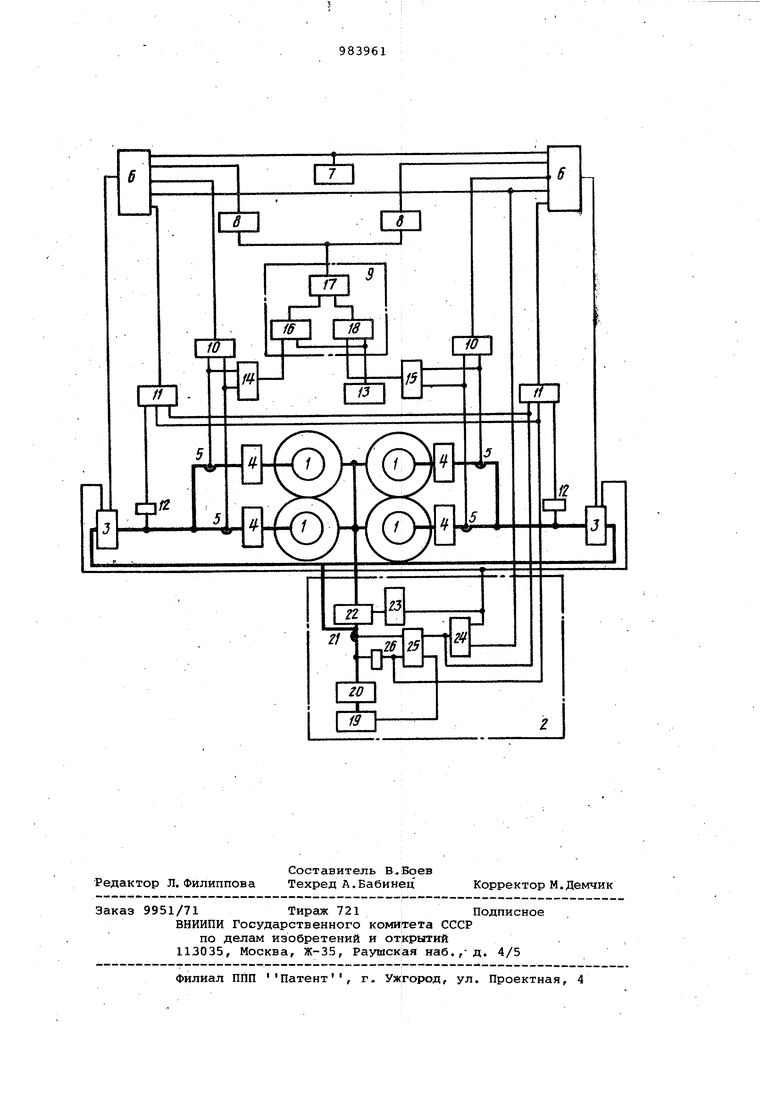
На чертеже приведена структурная схема многодвигательного электропривода.
Многодвигательный электропривод содержит две группы асинхронных электродвигателей 1, обмотки статоров которых подключены к автономному источнику 2 переменного тока, дв импульсных регулятора 3 тока, си-, ловой вход каждого из которых через выпрямитель 4 и датчик 5 тока подключен к обмоткам роторов соответствующей группы асинхронных электродвигателей, два блока б регулирования частоты вращения, первые входы которых соединены с задатчиком 7 частоты вращения, два усилителя 8, соединяющие выход блока 9 управления с вторыми входами блоков б регулирования частоты вращения, два блока 10 выявления ведущего электродвигателя, входы которых подключены выходам датчиков 5 тока соответствукяцей группы асинхронных электродвигателей 1, а выходы соединены с третьими входами соответствующих блоков б регулирования частоты вращения, четвертые входы которых соединены с функциональными блоками 11 одни входы которых соединены с выходами датчиков 12 напряжения обмоток роторов электродвигателей 1, а другие входы подключены к двум выходам автономного источника 2 перменного тока, датчик 13 поворота механизма, подключенный к одному
входу блока 9 управления, другие входы которого подключены к выходам датчиков 5.тока, выходы блоков 6 регулирования частоты вращения подключены к одним управляющим входам шлпульсных регуляторов 3 тока, третий выход автономного источника 2 переменного тока соединен с пятыми входами блоков б регулирования частоты вращения, а его четвертый выход соединен с другими управляющими входами импульсных регуляторов 3 тока , силовые, выходы которых соединены с силовым входом автономного источника 2 переменного тока.
Блок 9 управления содержит три сумматора 14-16 и два элемента 17 и 18 сравнения, причем входы элемента 17 сравнения соединены с выходами сумматоров 16 и 18, входыкоторых соединены с сумматорами 14 и 15 и с датчиком 13 поворота механизма.
Автономный источник 2 переменного ока содержит последовательно соединенные синхронный генератор 19 тяговый выпрямитель 20, датчик 21 тока и инвертор 22 напряжения, управляющий вход которого через блок 23 управления соединен с четвертым выходом автономного источника 2 переменного тока и .с одним выходом генератора 24 частоты, другой выход и вход генератора 24 частоты соединен соответственно с вторым и третьим выходами автономного источника 2 переменного тока, блок 25 управления, один вход которого соединен с выходом датчика 21 тока, другой вход соединен с выходом датчика 26 напряжения тягового выпрямителя 20 и с первым выходом автономного источник 2 переменного тока, один выход блока 25 управления соединен со входом генератора 24 частоты, а другой выход соединен с управляющим входом синхронного генератора 19.
Регулирование частоты вращения каждой группы асинхронных электро-, двигателей 1 с фазньам ротором изменением режима работы групповых импульсных регуляторов 3 осуществляется вниз от синхронной частота их вращения, определяемой уровнем и частотой трехфазного питающего напряжения на силовом йыходе автономного источника 2 переменного тока, осуществляющего частотное регулирование асинхронных электродвигателей 1 с фазным ротором.
Для обеспечения требуемого диапазона общего частотного регулиров&ния частоты вращения асинхронных электродвигателей 1 с фазным ротором в многодвигательном асинхронном электроприводе, применяемом для тяги пневмоколесных машин, необходиМО, чтобы уровень питающего статоры асинхронных электродвигателей 1 трехфазного напряжения был обратно пропорционален их суммарному току нагрузки, а частота напряжения должна быть функционально (например, квадратично) связана с уровнем этого напряжения, чем обеспечивается.постоянство мощности многодвигательного асинхронного электропривода и требуемое
0 изменение потока асинхронных электродвигателей 1 с фазным ротором в процессе их частотного регулирования.
Устройство работает следуницим образом.
5
На одном выходе генератора 24 частоты формируется напряжение в виде прямоугольных импульсов фиксированной длительности, а на другом выходе - напряжение в виде пилообразных
0 импульсов постоянной амплитуды, причем частота этих напряжений опред:эляется уровнем сигнала, поступающего на вход генератора 24 частоты с первого ВБКода блока 25 управления.
5
Уровень сигнала на одном выходе блока 25 управления формируется в функции выпрямленного тока тягового выпрямителя 20 (измеряемого датчиком 2 тока) и напряжение на его выходе
0 (измеряемое датчиком 26 напряжения) изменяется таким образом, чтобы частота напряжений на выходах генератора 24 частоты изменялась обратно пропорционально квадрату выпрямленно5го тока на выходе тягового выпрямите-, ля 20, а сигнал на другом выходе блока 25 управления изменяется при этом так, чтобы электрическая мощность на выходе тягового выпрямите0ля 20 была постоянной и, таким , была постоянной активная мощность на выходе синхронного генератора 19, причем 5фовень напряжения на выходе синхронного генератора 19, и
5 следовательно, тягового выпрямите - . ля 20, определяется уровнем сигна- ла на управляющем входе синхронного генератора 19, соединенном с выходом блока 25 управления. .,
0
Таким образом, изменение уровня напряжения на одном выходе блока 25 управления осуществляется обратно пропорционально выпрямленному току
на выходе тягового выпрямителя 20, и, следовательно, это изменение пропорционально корню квадратному от уровня нгшряжения на другом выходе блока 25 управления, чем достйгается требуемое функциональное соответствие между уровнем напряжения на выходе синхронного генератора 19 и частотой трехфазного напряжения на силовом выходе инвертора 22
напряжения. На силовом выходе инвертора 22 н пряжения и, следовательно, на.сое динекном с ним выходе автономного источника 2 переменного тока, формируется переменное трехфазное напряжение. . Характерной особенностью работы электродвигателей одной группы пневмоколесной машины является неравномерность загрузки отдельных элект родвигателей, причем из-за наличия буксования относительная бортовая скорость движения машины определяется частотой вращения наиболее нагруженного электродвигателя, а час,тоты вращения менее нагруженных электродвигателей не должны быть меньше частоты вращения наиболее нагруженного электродвигателя. Поскольку наиболее нагруженным электродвигателем может бы.ть любой то его выявление, необходимое для реализации требуемой перегрузочной способности группы электродвигателе обеспечивается блоком 10 выявления ведущего электродвигателя, на входы которого поступают сигналы с выходо датчиков-5 тока, а на выходе формируется сигнал обратной связи по току, пропорциональный выпрямленному току (нагрузке) наиболее нагруженного электродвигателя 1, т.е. на выход блока 10 проходит максимальный из поступивших на его вход сигнало Назначение функционального блока 11 состоит в вычислении сигнала обратной связи по частоте вращения, пропорционального установившейся частоте вращения наиболее нагруженного асинхронного электродвигате ля 1 данной группы. Для этого на входы функци&нального блока II с управляющих выходов автономного ис точника 2 переменного тока поступа toT сигналы, пропорциональные соответственно частоте f и уровню U напряжения на выходе автономного и точника 2 переменного тока и посту пает сигнал и., пропорциональный приведенному к статору выпрямленном I напряжению роторов асинхронных эле родвигателей 1. Функциональный блок 11 осуществ ляет вычитание сигналов, поступающ на его входы, деление результата в читания на сигнал, поступающий на его другой вход, и умножение результата деления на сигнал, поступающий на первый вход функционального блока 11. Таким образом, на выходе функци онального блока 11 формируется сиг нал обратной связи по частоте вращения Ш, определяемый соотношением €(-s), где S - скольжение ротора наиболее нагруженного асинхронного электродвигателя 1. Блок б регулирования частоты вращения осуществляет суммирование сигналов, поступающих на его три входа, первое сравнение результата суммирования с сигналом, поступающим на его пятый вход, формирование сигнала, скорость изменения которого пропорциональна результату сравнения, второе сравнение сформированного сигнала с сигналом, поступающим на четвертый вход блока б регулирования частоты вращения и формирование на его выходе в момент равенства этих сигналов последовательности прямоугольных импульсов фиксированной длительности, частота повторения которых равна частоте повторения пилообразных импульсов на его входе. Импульсы с выхода блока 6 регулирования частоты вращения поступают на управляющий вход импульсного регулятора 3 тока, выключая его. На другой управляющий вход импульсного регулятора 3 тока поступают включающие его импульсы фиксированной длительности с управляющего выхода автономного источника 2 переменного тока. Интервал времени между приходом включаклцего импульса и приходом выключающего импульса соответствует интервалу времени включенного состояния импульсного регулятора 3 тока, определяющему частоту вращения наиболее нагруженного (ведущего) асинхронного электродвигателя 1. При изменении режима работы, например увеличении (уменьшении) нагрузки электродвигателя 1, приводящему к уменьшению (увеличению) частоты вращения ведущего электродвигателя 1, неизменной уставке задатчика 7 частоты вращения и постоянном, например, нулевом, уровне сигнала на выходе блока 9 управления, уменьшается (увеличивается) уровень сигнала обратной связи по частоте вращения на выходе функционального блока 11 и увеличивается (уменьшается) уровень сигнала обратной связи по току на выходе блока 10 выявления ведущего электродвигателя. Изменяющиесй по уровню сигналы с выходов блока 10 функционального блока 11, неизменный по уровню сигнал с выхода общего задатчика 7 частоты вращения, нулевой сигнал с выхода усилителя 8 (поскольку равен нулю сигнал на его входе, т.е. на выходе блока 9 управления) и пилообразный сигнал с управлягадего выхода автономного источника 2 переменного тока поступают на соответствующие входы
блока б регулирования частоты вращения .
Поскольку обратная связь по частоте вращения эффективней обратной связи по току, то изменение сигнала на выходе блока б регулирования частоты вращения определяется, в основном, действием сигнала обратной связи по частоте вращения и, соответственно -возрастает (уменьшается) интервал включенного состояния импульсного регулятора 3 тока, что приводит к возрастанию (уменьшению) частоты вращения асинхронных электродвигателей 1 и происходит это до тех пор, пока действительная частота вращения наиболее нагруженного (ведущего) электродвигателя1 не станет равной заданному -значению, I определяемому уставкой общего задатчика 7 частоты вращения, причем за счет использования сигнала обратной связи по току ведущего электродвигателя 1 обеспечивается высокая точность процесса регулирования (стабилизации) частоты вращения наиболее нагруженного электродвигателя 1. Частоты вращения остальных электродвигателей 1 данной группы определяются их индивидуальной нагрузкой и равны или выше частоты вращения ведущего электродвигателя
При изменении уставки общего задатчика 7 частоты вращения процесс регулирования частоты вращения асинхронных электродвигателей 1 протекает аналогично.
Для поворота мсШ1ины без перегрузки электродвигателей 1 .одной группы (борта), а также обеспечения устойчивого прямолинейного движения машины при различной нагрузке групп электродвигателей 1 используется блок 9 управления. Допустим чтосигнал на выходе датчика 13 поворота механизма равен нулю, что соответ-cTjsyeT движению пневмоколесной машины по прямой, а нагрузка электродвигателей 1 одной группы не равна нагрузке электродвигателей 1 другой группы.
В этом случае уровни сигналов на выходах .сумматора 16 и элемента 18 сравнения равны сигналам, поступающим соответственно на входы блока 9 управления с выходов сумматоров 14 и 15. Сигналы на выходе сумматоров 19 и 15 пропорциональны сумме выпрямленных токов (нагрузке) электродвигателей 1 соответствующей группы Одинаковы (положительны) знаки сигналов на выходах сумматора 16 и элемента 18 сравнения, поскольку сумматор 16 не изменяет положительного знака сигнала, поступающего на первый вход блока 9 управления, а положительный сигнал на его втором входе поступает на первый (положительный) вход элемента 18 сравнения и, следовательно, также не изменяет знака. Положительные сигналы с выходов су 1матора 16 и элемента 18 сравнения поступают соответственно на первый (положительный) и второй (отрицательный) входы элемента 17 сравнения, на выходе которого формирует0ся сигнал, уровень и знак которого определяются в этом случае разностью сигналов на входе сумматора 14 и сумматора 15, т.е. разностью суммарных нагрузок бортовых групп электро5двигателей.
Если сигнал на выходе сумматора 14 больше по уровню сигнала на выходе сумматора 15, то сигнал на выходе элемента 17 сравнения положителен ...
Если сигнал на выходе сумматора
0 14 меньше по уровню сигнала на выходе сумматора 15, то сигнал на вы1ходе элемента 17 сравнения отрицателен.
При одинаковом (положительном
5 или отрицательном) знаке сигнала на выходе элемента 17 сравнения необходимо обеспечить такое управление частотой вращения электродвигателей
0 1 каждой группы, при котором частота вращения электродвигателей 1 наиболее нагруженной группы умейьшается, а наименее нагруженной увеличивается. Для этого в каждой группе установлены усилители 8, характеристики
5 которых выбраны таким образом, что при поступлении на их входы положительного сигнала с выхода элемента 17 сравнения на выходе усилителя 8 одной группы (нагрузка электродвигателей
0 которой превосходит нагрузку электродвигателей другой бортовой группы) знак сигнала становится отрицательным, а на выходе усилителя 8 другой группы(нагрузка электродвигателей ко5торой меньше) остается положительным. При поступлении же на входы усилителей 8 отрицательного сигнала с выхода элемента 17 сравнения выхода первого блока 9 управления) на вы0ходе усилителя 8 одной группы (нагрузка электродвигателей которой в рассматриваемом ранее случае была больше нагрузки электродвигателей другой группы) знак сигнала остает5 I ся отрицательным, а на выходе уси1лителя 8 другой группы становится положительньаи, т.е.. характеристики усилителей 8 каждой группы зеркально симметричны. Уровни же сигналов на
0 выходах усилителей 8 каждой группы равны и пропорциональны уровню сигнала на выходе элемента 17 сравнения.
Поступление положительного сигнала на вход блока б регулирования
5
частоты вращения с выхода усилителя 8 приводит к увеличению интервала включенного состояния импульсного регулятора 3 тока и, следова±ельно, к увеличению частоты вращения электродвигателей 1 данной группы«
Поступление же отрицательного сигнала на вход блока 6 с выхода усилителя 8 приводит к уменьшению частоты вращения электродвигателей 1 данной группы.
Таким образом, неравенство нагрузок электродвигателей 1 двух групп приводит к увеличению частоты вращения электродвигателей 1 наименее нагруженной группы и уменьшение частоты вращения электродвигателей 1 более нагруженной группы. Поскольку увеличение частоты вращения электродвигателей 1 приводит к увеличению момента, развиваемого электродвигателями 1, то указанное взаимное изменение частот вращения электродвигателей 1 происходит до тех nopf пока нагрузка электродвигателей 1 одной группы не станет равной нагрузке электродвигателей 1 .другой группы, т.е. станет равным нулю сигнал на выходе элемента 17 сравнения (на выходе блока 9 управления). Следовательно, в процессе функционирования многодвигательного асинхронного электропривод обеспечивается равенство тяговых моментов (нагрузок) электродвигателей двух .групп, необходимое для обеспечения устойчивости и управляемости пневмоколесной машины,
В процессе функционирования многдвигательного асинхронного электропривода, применяемого для тягового электропривода пневмоколесных машин с шарнирно сочлененной рамой, возникает необходимость в обеспечении разбаланса частот вращения электродвигателей групп, например при повороте машины, причем частоты вращени электродвигателей одной группы могу быть одинаковыми. Это обеспечивается датчиком 13 поворота механизма, сигнал с выхода которого, пропорцио J|ьный требуемому разбалансу частот вращения, поступает на вход блока 9 управлений. Если нагрузки электродвигателей обеих групп равны, то на выходе датчика 13 поворота формируется положительный сигнал. Это приводит к увеличению сигнала на выходе сумматора 16 и уменьшению сигнала на выходе элемента 18 сравнения, т.е. к формированию сигнала положительного знака на выходе элемента 17 сравнения (выходе блока 9 управления), что приводит к увеличению частоты вращения электродвигателей 1 ОДНОЙ и уменьшению частоты вращения электродвигателей 1 другой группы (к положительному разбалансу частот вращения), т.е. повороту машины. Изменение частот вращения электродвигателей различных групп происходит до тех пор, пока сигнал на выходе элемента 17 сравнения не станет равным нулю, а установившийся разбаланс частот вращения электродвигателей 1 двух групп не достигнет заданного значения, определег|ного уровнем сигнала на выходе датчика 13 поворота ,
При формировании на выходе датчика 13 поворота механизма сигнала отрицательного знака, сигнал на выходе элемента 18 сравнения увеличивается, а на выходе сумматора 16 уменьшается и на выходе элемента 17
0 сравнения формируется отрицательный сигнал, приводящий к возникновению отрицательного разбаланса частот вращения электродвигателей 1 двух групп, аг.е. повороту машины в противоположную, относительно рассматриваемого ранее случая, сторону.
Таким образом, частота вращения асинхронных электродвигателей 1 определяется уставкой общего за-
0 датчика .7 частоты вращения и практически не зависит от режима работы синхронного генератора 19, тягового выпрямителя 20 и инвертора 22 напряжения . Действительная же скорость
5 движения машины определяется частотой вращения наиболее нагруженных электродвигателей 1 группы, т.е. общего задатчика 7 частоты, которая может изменяться в процессе функционирования многодвигательного асинхронного электропривода в зависимости от конкретных технологических условий в диапазоне, определяемом наррузкой асинхронных электродвигателей 1 и значением интервала времени включенного состояния импульсов регуляторов 3.
За счет применения функционального блока в каждой группе представл ляется возможным осуществить частотное регулиров-ание синхронной частоты вращения асинхронных электродвигателей с фазным ротором с высркой точностью стабилизации, что позволяет
е существенно расширить диапазон регулирования частоты вращения электродв гателей и применять предлагаемый многодвигательный асинхронный электроцривод для тягового привода пневмоKOJ ecHHx машин с шарнирно сочлененной рамой.
Формула изобретения 1. Многодвигательный электропривод, содержащий две группы асинхронных электродвигателей, обмотки статоров которых подключены к автономному источнику переменного тока, два блока регулирования частоты вращения, два импульсных регулятора тока, силовой вход каждого из которых через датчик тока и выпрямитель подключен к обмоткам роторов соответствующей группы асинхронных электродвигателей, два блока выявления ведущего электродвигателя, входы которых подключены к выходам датчиков тока, а выходы соединены с первыми входами соответствующих блоков регулирования частоты вращен вторые входы которых соединены с эа датчиком частоты вращения, а вйходы - с первыми управляющими входа соответствующих импульсных регулято ров тока, блок управления,- выход которого связан, с третьими входами блоков регулирования частоты вращения, отлича-ющийся тем, что, с целью повышения точности установки и поддержания заданной частоты вращения электропривода, в него введены два функциональных блока, датчик поворота механизма и два датчика напряжения обмотки роторов электродвигателей, выходы датчиков напряжения подключены к первым входам соответствующих функциональных блоков, другие два входа которых подключены к двум выходам автономного источника переменного тока, а выходы соединены с четверты ми входами соответствукяцих регулято ров частоты вращения, пятые входы которых соединены с третьим выходом автономного источника переменного тока, одни входы блока управления соединены с выходами датчиков тока, другой вход блока управления соединен с датчиком поворота, четвертый выход автономного источника переменного тока соединен с вторыми управляющими входами импульсных регуляторов тока, силовые выходы ксторых соединены с силовым входом автономного источника переменного тока. 2. Электропривод по п.1, отличающийся тем, что автономный источник переменного тока содержит синхронный генератор, тяговый выпрямитель, два блока управления, датчик напряженияи датчик тока, генератор частоты и инвертор напряжения, силовой вход которого через датчик тока и тяговый выпрямитель соединен с выходом синхронного генератора, управляющий вход которого соединен с одним выходом первого блока управления, второй выход которого соединен с первым выходом автономного источника переменного тока и с входом генератора частоты, один вход первого блока управления соединен с выходом датчика тока, а другой вход - с выходом датчика напряжения и с вторым выходом автономного источника переменного тока, ВХОД датчика напряжения соединен с тяговым выпрямителем, выходы генератора частоты соединены с третьим и четвертым выходами автономного источника переменного«тока, управляниций вход инвертора напряжения через второй блок управления соединен с одним из выходов генератора частоты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 748767, кл. Н 02 Р 7/74, 1980. 2.Авторское свидетельство СССР 699642, кл. Н 02 Р 5/50, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Многодвигательный частотнорегулируемый электропривод | 1978 |
|
SU748767A1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| Асинхронный электропривод | 1989 |
|
SU1697252A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2067351C1 |