ПЕРЕКРЕСТНАЯ ССЫЛКА НА ПРЕДШЕСТВУЮЩИЕ ЗАЯВКИ НА ИЗОБРЕТЕНИЕ
Эта заявка на изобретение претендует на преимущество находящейся в процессе одновременного рассмотрения предварительной заявки на патент США №60/825093, поданной 8 сентября 2006, которая включена сюда в полном объеме путем ссылки.
УВЕДОМЛЕНИЕ О НАУЧНО-ИССЛЕДОВАТЕЛЬСКИХ И ОПЫТНО-КОНСТРУКТОРСКИХ РАБОТАХ, ФИНАНСИРУЕМЫХ ФЕДЕРАЛЬНЫМ ПРАВИТЕЛЬСТВОМ США
Это изобретение было сделано при поддержке федерального правительства США по контракту DE-FG02-05ER84159, заключенному с Министерством энергетики США. Правительство имеет определенные права в этом изобретении.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к надежному, дешевому, бесконтактному, неинвазивному, высокоточному датчику с высокой разрешающей способностью, который одновременно осуществляет текущий контроль провисания проводов высоковольтных линий электропередачи, температуры, максимальной токонесущей способности (или "допустимой токовой нагрузки провода в амперах") и тока фазы. Учитывая эти данные, система может производить оценку располагаемой пропускной способности ("ATC", далее - "РПС") и производить динамическую оценку цепи. Система из этого изобретения функционирует очень хорошо даже с минимальным количеством установленных датчиков, и система может быть сконфигурирована либо в полностью портативном виде, либо как установленная для длительного использования. В предложенных в настоящем изобретении компьютеризированной системе и способе используют магнитное поле, создаваемое воздушными линиями передачи и распределения электроэнергии, для определения свойств воздушных фазных проводов и тока в них. Система целесообразно использует тот факт, что магнитное поле от фазных проводов является более устойчивым, чем электрическое поле проводов. Электрическое поле, или "e-поле", легко искажается под влиянием погоды и из-за влияния земли, потому использование магнитного поля обеспечивает более устойчивую систему, которая может использоваться при разнообразных внешних условиях.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Рост потребностей в электроэнергии стал значительно более быстрым, чем способность систем передачи электроэнергии обеспечивать ее подачу, и надежно обеспечивать ее подачу. В результате, воздушная система передачи и распределения электроэнергии работает в таком режиме, для которого она не была спроектирована; узкие места и перегрузка, нарушения энергоснабжения, повреждения оборудования и неисправности системы становятся широко распространенными и происходят с постоянно увеличивающейся частотой.
Контроль важных линий электропередачи, работающих с перегрузкой, в реальном времени улучшил бы надежность, снизил бы перегрузку, увеличил бы располагаемую пропускную способность ("РПС") и позволил бы безопасно передавать больше электроэнергии через существующие цепи, чем возможно в настоящее время. В результате, существующая система обслуживала бы большее потребление; могли бы быть увеличены доходы от эксплуатации, и некоторые стимулируемые потреблением затраты на новое строительство и модернизацию могли бы быть сокращены. В то же самое время может быть повышена безотказность работы системы, ее надежность и пропускная способность передачи электроэнергии.
Существующие системы текущего контроля и динамической оценки цепи по нагреву ("DTCR") в реальном времени ("RT") имеют весьма большую общую установочную стоимость. Большая стоимость и другие проблемы, связанные с этой продукцией, препятствовали проникновению на рынок, одобрению, использованию и развитию этих технологий. Датчик из этого изобретения будет намного менее дорогостоящим, чем существующий датчик и существующие технологии DTCR, он будет способен обеспечивать легкую и быструю установку и калибровку и даст возможность реализации широко распространенной, дешевой системы DTCR.
Усовершенствования, необходимые для освобождения узких мест и для уменьшения перегрузки в линиях электропередачи при одновременном сохранении надежности, были тщательно изучены, подробно описаны и неоднократно рекомендованы. В лучшем случае этот объем работ стоимостью 50-100 миллиардов долларов США рассчитан на десятилетия. Несмотря на то что необходимые усовершенствования по большей части являются понятными и уже были детализированы и запланированы для исполнения, начало их реализации является очень медленным. Несмотря на то что реализация части этих усовершенствований (в том числе, заметное новое строительство) началась в конце 1990-х годов и осуществляется в настоящее время, скорость реализации усовершенствований все еще очень значительно отстает от роста потребностей.
Перегрузки стоят потребителям электроэнергии, приблизительно, четыре миллиарда долларов в год. Затраты, связанные с перегрузкой, могли бы быть значительно уменьшены, если была бы обеспечена возможность передачи большего количества электроэнергии по воздушным линиям электропередачи, работающим с перегрузкой, при одновременном сохранении надежности. Увеличенная пропускная способность улучшила бы надежность сети за счет предоставления регионам возможности совместного использования резервов пропускной способности. Текущий контроль параметров сети, работающей с перегрузкой, в реальном времени - является точкой сосредоточения усилий, направленных на обеспечение более высокой эффективности и надежности сети путем усовершенствованных измерений и визуализации сети. Эти параметры включают в себя, в том числе, провисание, температуру, ток, допустимую токовую нагрузку провода в амперах и РПС ("располагаемая пропускная способность"). Когда эти параметры могут быть определены точно и в реальном времени, то может быть выявлена латентная или "скрытая" пропускная способность; в таком случае она может быть проконтролирована, определена количественно, зарегистрирована и смоделирована. В конечном счете, и что является еще более важным, такая пропускная способность может быть увеличена посредством динамической оценки цепи по нагреву и эксплуатации с ее учетом. Системы динамической оценки цепи по нагреву в реальном времени ("RT-DTCR") максимально улучшают эксплуатационные характеристики линий электропередачи (РПС, допустимую токовую нагрузку провода в амперах, КПД) при одновременном сохранении надежности.
Несмотря на то что со временем появились некоторые серийно выпускаемые датчики и системы DTCR для линий электропередачи высокого напряжения ("HVTL", далее - "ЛЭП ВН"), несколько факторов препятствуют их одобрению, проникновению на рынок, использованию и росту использования. Некоторые технологии неотступно преследовали технические проблемы (например, отказ системы, влияние датчиков на надежность, плохая точность, частые потери калибровки, сложный/длительный/инвазивный монтаж или калибровка). Более важным фактором являлась очень высокая общая установочная стоимость. Датчик/система DTCR для воздушной линии электропередачи (OHTL, далее - ВЛЭП) с существенно более низкими затратами представлял бы собой значительное усовершенствование по сравнению с существующими коммерческими технологиями.
Попыткам разработки устройств, предназначенных для измерения пропускной способности, коэффициента использования и коэффициента готовности проводов, препятствует сложность конструкции или монтажа. Например, фирма "Genscape, Inc." имеет множество поданных патентных заявок на их способ текущего контроля потокораспределения мощности и тока в фазных проводах. В некоторых публикациях фирмы "Genscape, Inc." (например, в патенте США №6714000; в патенте США №6771058; в патенте США №6956364; и в заявке на патент США №20050162148) для получения динамических характеристик электроэнергии необходимы измерения магнитного поля и измерения электрического поля. Двойные измерения, предложенные фирмой "Genscape", влекут за собой весьма сложную обработку данных для оценки потокораспределения мощности (в мегаваттах (МВт)) в линиях электропередачи высокого напряжения.
В заявке на патент США №20070052493, поданной фирмой "Genscape", измерения магнитного потока используют для определения того, какое местоположение под воздушным проводом является оптимальным для обнаружения изменений магнитного поля. В публикации '493 не приведено подробное описание того, каким образом данные, собранные в этом способе, могли бы быть использованы для определения дополнительных полезных параметров, таких как, например, размер фазного провода, угол фазы, значения высоты кабеля, температура и допустимая токовая нагрузка провода в амперах.
В заявке на патент США №20050286190, автором которой является Рострон (Rostron), раскрыта система текущего контроля электроэнергии с использованием датчиков электромагнитного поля, расположенных на расстоянии от фазных проводов. Ростроном (Rostron) не раскрыты математические основы и алгоритмы для неизвестных системных переменных. В лучшем случае Ростроном (Rostron) раскрыта идея, заключающаяся в том, что данные измерений электромагнитного поля с неподвижного наземного фундамента или платформы, расположенного над уровнем земли, могут быть использованы при прогнозировании токов фазы. Ростроном (Rostron) предложены немного большие подробности.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Описанное здесь изобретение включает в себя устройство, компьютеризированный способ и реализованную посредством компьютера систему для измерения магнитного поля, созданного фазными проводами, и для использования этих измерений для определения амплитуды, фазы и тока в фазном проводе, а также положение этого провода в пространстве (провисания). В этом способе для обеспечения точности не требуются ни измерения температуры провода, ни измерения электрического поля. Эти значения, в дополнение к известным стандартам для материалов в системе распределения электроэнергии, позволяют вычислять амплитуду и фазу тока, в дополнение к вычислению провисания линии, с использованием измерений посредством расположенного на расстоянии датчика. После вычисления линейного тока и провисания может быть определена температура провода и его пропускная способность, а также допустимая токовая нагрузка провода в амперах.
Задачи этого изобретения достигнуты за счет использования датчика для измерения пространственной фазы и амплитуды магнитного поля, создаваемого фазными проводами в системе воздушной линии передачи. В датчике целесообразно используют, по меньшей мере, две параллельные катушки из провода, имеющие токи противоположной полярности, сгенерированные магнитным полем. Катушки, также именуемые здесь обмотками, взаимно компенсируют электрическое поле и подавляют связанные с ним помехи для лучшей точности.
Датчики используют попарно для измерения составляющих x и y магнитного поля от воздушной линии передачи и распределения электроэнергии. Эти составляющие магнитного поля наводят соответствующие напряжения разомкнутой цепи на каждом датчике, которые служат в качестве входных данных, подаваемых в более крупную компьютеризированную систему для вычисления других интересующих параметров в модели.
В раскрытой и заявленной здесь системе также реализован компьютеризированный способ измерения физической высоты трех или более фазных проводов в системе передачи и распределения электроэнергии. В частности, входящие в состав системы модули сбора информации и анализа данных рационально приводят в соответствие сопоставимые данные измерений с известными рабочими параметрами для определения, как минимум, высоты фазного провода, а также величины и фазы тока в этом проводе. Другие параметры, такие как, например, провисание, допустимая токовая нагрузка провода в амперах, пропускная способность и частота тока, равно как и температура провода, также могут быть определены из системы, раскрытой и заявленной ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг.1 схематично изображена электронная схема из этого изобретения, смонтированная для эксплуатации в полевых условиях, которая имеет датчики магнитного поля под фазными проводами воздушной линии.
На Фиг.2 показано представленное в трех частях изображение датчиков, расположенных под горизонтально ориентированной трехфазной воздушной линией электропередачи, и соответствующий выходной сигнал, генерируемый системой.
На Фиг.3A и Фиг.3Б показано представленное в трех частях изображение датчиков, расположенных под вертикально ориентированной трехфазной воздушной линией электропередачи, и соответствующий выходной сигнал, генерируемый системой.
На Фиг.4 изображен датчик магнитного поля с компенсацией электрического поля, имеющий две катушки противоположной полярности.
На Фиг.5 схематично изображена разводка проводов катушки датчиков, показанных на Фиг.4.
На Фиг.6 показана пара датчиков магнитного поля с компенсацией электрического поля для их размещения под воздушной линией электропередачи, согласно этому изобретению.
На Фиг.7 показана пара датчиков из Фиг.6 с защитным кожухом для установок на долгосрочный период.
На Фиг.8 изображен график вертикальной составляющей поля для картины магнитного поля, сгенерированного воздушной линией электропередачи, которое было бы измерено на уровне земли/земной поверхности.
На Фиг.9 изображен график среднего тока, вычисленного системой датчиков, в сравнении с известными значениями.
На чертеже Фиг.10 изображен график высоты, вычисленной системой датчиков, в сравнении с известным измеренным значением.
На чертеже Фиг.11 изображена схема компьютерной логики, используемой в одном из вариантов осуществления сборщика данных для вычисления параметров системы воздушной передачи электроэнергии по измеренным напряжениям датчика.
ПОДРОБНОЕ ОПИСАНИЕ
Высоковольтные воздушные фазные провода представляют собой очень длинные, мягкие подвески, электромеханические характеристики и характер поведения которых уже были глубоко изучены, являясь очень хорошо понятными1. Квази-прямолинейные фазные провода генерируют изменяющиеся во времени магнитные поля, которые при частоте 60 Гц могут считаться квазистатическими. Напряженность поля в любом месте может быть измерена очень точно и, если она измерена одновременно во множестве различных мест в пространстве, то использована для точного определения расстояния до проводов. В свою очередь это расстояние может быть использовано для определения провисания проводов; зная его, могут быть точно установлены следующие параметры: средняя температура провода, угол фазы тока и величина тока.
Магнитное поле  вокруг фазного провода имеет величину
вокруг фазного провода имеет величину  , где
, где  - расстояние до провода, а
- расстояние до провода, а  - фазный ток. В трехфазных линиях электропередачи фазные токи
- фазный ток. В трехфазных линиях электропередачи фазные токи  ,
,  и
и  , являющиеся сдвинутыми по фазе на 120 градусов, значительно изменяются в течение суток. В реалистичных системах будут возникать дисбалансы, на устранение которых направлена работа, обеспечивающая поддержку этого изобретения. Несмотря на то что рассмотренные ниже физические основы преимущественно относятся к сбалансированной системе, настоящее изобретение охватывает множество несбалансированных параметров, которые могут иметься в любой заданной ситуации.
, являющиеся сдвинутыми по фазе на 120 градусов, значительно изменяются в течение суток. В реалистичных системах будут возникать дисбалансы, на устранение которых направлена работа, обеспечивающая поддержку этого изобретения. Несмотря на то что рассмотренные ниже физические основы преимущественно относятся к сбалансированной системе, настоящее изобретение охватывает множество несбалансированных параметров, которые могут иметься в любой заданной ситуации.
 ,
,  и
и  непрерывно изменяются по напряженности и направлениям с основной частотой (равной, например, 60 Гц в США и 50 Гц в Европе). Для определения суммарного поля
непрерывно изменяются по напряженности и направлениям с основной частотой (равной, например, 60 Гц в США и 50 Гц в Европе). Для определения суммарного поля  в любом метоположении нужно вычислить векторную сумму трех вносящих вклад полей путем разложения их на горизонтальную (x) и вертикальную (y) составляющие и путем суммирования их по отдельности. Эта сумма записывается следующим образом:
в любом метоположении нужно вычислить векторную сумму трех вносящих вклад полей путем разложения их на горизонтальную (x) и вертикальную (y) составляющие и путем суммирования их по отдельности. Эта сумма записывается следующим образом:  и
и  . Следует отметить, что только составляющие x и y магнитного поля являются важными для изложенных здесь целей, поскольку третья составляющая z настолько мала, что не является статистически значимой для описанной здесь системы.
. Следует отметить, что только составляющие x и y магнитного поля являются важными для изложенных здесь целей, поскольку третья составляющая z настолько мала, что не является статистически значимой для описанной здесь системы.
Для схемы с горизонтальной конфигурацией фазного провода, например для схемы из Фиг.2, значения  и
и  в точке непосредственно под низшей точкой центрального фазного провода 200, описываются следующим уравнением:
в точке непосредственно под низшей точкой центрального фазного провода 200, описываются следующим уравнением:
 (Уравнение 1.1),
(Уравнение 1.1),
где d - фиксированное расстояние между фазными проводами 200, 210 и 220, а h - высота проводов над контрольной точкой,
 (Уравнение 1.2 и 1.3)
(Уравнение 1.2 и 1.3)
Поскольку  являются синусоидами, то система должна суммировать три синусоидальные скалярные величины, имеющие сдвиг по фазе на 120 градусов. Рассмотрим три скалярные величины
являются синусоидами, то система должна суммировать три синусоидальные скалярные величины, имеющие сдвиг по фазе на 120 градусов. Рассмотрим три скалярные величины 
 которые изменяются синусоидально и являются сдвинутыми по фазе на 120 градусов. В векторном представлении на комплексной плоскости
которые изменяются синусоидально и являются сдвинутыми по фазе на 120 градусов. В векторном представлении на комплексной плоскости  могут быть выражены следующим образом:
могут быть выражены следующим образом:
 ,
,
 ,
,
 ,
,
где  равно
равно  ,
,  равно
равно  , и т.д. Значение объединенных величин описывается следующим уравнением
, и т.д. Значение объединенных величин описывается следующим уравнением
Отбрасывая нижний индекс "p", получают следующий результат:
 (Уравнение 2).
(Уравнение 2).
Для местоположения проверки непосредственно под низшей точкой центральной фазы система объединяет составляющие поля от трех фаз воздушной линии. Вставляя составляющую x из уравнений 1.1, 1.2 и 1.3 в уравнение 2, находят величину горизонтальной составляющей  поля, равную
поля, равную
 (Уравнение 3x)
(Уравнение 3x)
Аналогичным образом, для вертикальной составляющей  поля мы имеем
поля мы имеем
 (Уравнение 3y).
(Уравнение 3y).
Отношение составляющих равно
 (Уравнение 4).
(Уравнение 4).
Важно отметить, что когда нагрузка на проводе является сбалансированной, то уравнение 4 является независимым как от напряжения цепи, так и от тока в фазных проводах. Для линии электропередачи переменного тока с горизонтальной геометрией фазных проводов уравнение 4 показывает, что путем одновременного измерения амплитуды  и
и  по переменному току непосредственно под центральным фазным проводом, может быть определено расстояние от фазных проводов до регистрирующих катушек с использованием следующей формулы:
по переменному току непосредственно под центральным фазным проводом, может быть определено расстояние от фазных проводов до регистрирующих катушек с использованием следующей формулы:
 (Уравнение 5),
(Уравнение 5),
где  - фиксированное расстояние между фазными проводами. Зная
- фиксированное расстояние между фазными проводами. Зная  , затем из уравнения 3y можно вычислить фазный ток
, затем из уравнения 3y можно вычислить фазный ток  по следующей формуле:
по следующей формуле:
 и
и  могут быть определены путем измерения напряжений переменного тока, возникшие в катушках большой площади, расположенных в магнитном поле, по меньшей мере, одного фазного провода. Катушки могут быть использованы для измерения величины и фазы магнитных полей в трех измерениях (то есть, по координате "x", или в направлении "влево/вправо", по координате "y", или в направлении "вверх/вниз", и по координате "z", или в направлении "вперед/назад"). В этом варианте осуществления изобретения трехмерная картина полей может быть описана векторами, начала которых зафиксированы в точках в пространстве, а их вершины вращаются, например, с частотой 60 Гц, очерчивая эллипсы при своем вращении. Как будет более подробно объяснено ниже, в одном предпочтительном варианте осуществления системы из этого изобретения используют только те катушки, оси которых ориентированы в горизонтальном и в вертикальном направлениях.
могут быть определены путем измерения напряжений переменного тока, возникшие в катушках большой площади, расположенных в магнитном поле, по меньшей мере, одного фазного провода. Катушки могут быть использованы для измерения величины и фазы магнитных полей в трех измерениях (то есть, по координате "x", или в направлении "влево/вправо", по координате "y", или в направлении "вверх/вниз", и по координате "z", или в направлении "вперед/назад"). В этом варианте осуществления изобретения трехмерная картина полей может быть описана векторами, начала которых зафиксированы в точках в пространстве, а их вершины вращаются, например, с частотой 60 Гц, очерчивая эллипсы при своем вращении. Как будет более подробно объяснено ниже, в одном предпочтительном варианте осуществления системы из этого изобретения используют только те катушки, оси которых ориентированы в горизонтальном и в вертикальном направлениях.
Зная  , действующее значение напряжения
, действующее значение напряжения  для катушки,
для катушки,  обмоток которой охватывают площадь
обмоток которой охватывают площадь  , равно
, равно  . Частота
. Частота  равна 60 Гц,
равна 60 Гц,  генри на метр (Гн/м), а
генри на метр (Гн/м), а  представляет собой действующее значение амплитуды составляющей магнитного поля в направлении оси катушки. Для измерения
представляет собой действующее значение амплитуды составляющей магнитного поля в направлении оси катушки. Для измерения  используют катушку 12, например катушку, показанную на Фиг.6, ось которой ориентирована по горизонтали; для измерения
используют катушку 12, например катушку, показанную на Фиг.6, ось которой ориентирована по горизонтали; для измерения  требуется катушка 10, ось которой ориентирована по вертикали. Могут использоваться две идентичные катушки (см. Фиг.6) с ортогональными осями ("T-образная" конфигурация) для непрерывного текущего контроля
требуется катушка 10, ось которой ориентирована по вертикали. Могут использоваться две идентичные катушки (см. Фиг.6) с ортогональными осями ("T-образная" конфигурация) для непрерывного текущего контроля  , предоставляя непрерывную информацию о
, предоставляя непрерывную информацию о  и о действующем значении тока
и о действующем значении тока  .
.
Несмотря на то что уравнение 5 применимо только лишь к горизонтальной конфигурации фазных проводов, также может быть осуществлен текущий контроль фазных проводов с вертикальными конфигурациями их расположения (см. Фиг.3) с использованием надлежащим образом сконфигурированных катушек (10, 12, 14, 16, 18, 20). В этом случае составляющая  непосредственно под фазами будет равна нулю (из-за симметрии), поэтому не может быть использован подход, основанный на
непосредственно под фазами будет равна нулю (из-за симметрии), поэтому не может быть использован подход, основанный на  . Однако составляющая
. Однако составляющая  может быть измерена одновременно на двух высотах
может быть измерена одновременно на двух высотах  и
и  непосредственно под проводами 310, 320 и очень близко к уровню земли; отношение
непосредственно под проводами 310, 320 и очень близко к уровню земли; отношение  может быть, затем, использовано для определения
может быть, затем, использовано для определения  , и, зная этот параметр, для определения
, и, зная этот параметр, для определения  . Схема и функциональная блок-схема системы для эксплуатационных испытаний в полевых условиях показана на Фиг.1.
. Схема и функциональная блок-схема системы для эксплуатационных испытаний в полевых условиях показана на Фиг.1.
Как показано на Фиг.1 и Фиг.2, один из вариантов осуществления этого изобретения включает в себя две катушки 14, 16 большой площади (650-1000 м2), расположенные непосредственно под низшей точкой центрального фазного провода 200 горизонтально сконфигурированной линии электропередачи. Катушки 14, 16 установлены в виде "T-образной" конфигурации и расположены на уровне земли или немного выше его. Катушки и система датчиков занимают объем, приблизительно, 1 м3, установлены на тонкой бетонной подушке и размещены внутри высоконадежного, высокопрочного (неметаллического, с низким µ) корпуса, защищающего от атмосферных влияний. Кроме того, расчеты показывают, что при минимальных дополнительных расходах система датчиков может быть расположена немного ниже поверхности земли, при этом панель солнечной батареи и антенна расположены на ближайшей опоре линии электропередачи.
Были проведены всесторонние исследования и тщательное моделирование2,3,4 термомеханической зависимости между провисанием фазного провода и средней температурой провода. Несколько коммерческих пакетов программ, например "Sag 10", "LineAmps", пакет программ динамической оценки цепи по нагреву ("DTCR") Научно-исследовательского института электроэнергетики (США) (EPRI) и "IntelliCat" фирмы "Valley Group", основаны на априорных моделях. При наличии информации о механических характеристиках, технической информации и информации о размерах, относящейся к конкретному контролируемому пролету и проводу (например, о натяжении линии, о типе и свойствах провода, о длине пролета), может быть определена средняя температура проводов в пролете по результатам точных измерений провисания проводов в реальном времени. Объединение  с точными сведениями о провисании проводов и о температуре и учет допустимой статической токовой нагрузки провода (последняя зависит от температуры) позволяет вычислить допустимую токовую нагрузку провода в амперах. Разность между фактической допустимой токовой нагрузкой провода в амперах в реальном времени и фактическим
с точными сведениями о провисании проводов и о температуре и учет допустимой статической токовой нагрузки провода (последняя зависит от температуры) позволяет вычислить допустимую токовую нагрузку провода в амперах. Разность между фактической допустимой токовой нагрузкой провода в амперах в реальном времени и фактическим  провода в реальном времени является мерой запаса по пропускной способности или дополнительной пропускной способности, доступной для операторов, если контролируемые пролеты не имеют ограничений по воздушному промежутку (по провисанию) и/или по тепловым параметрам. Это является основой для динамической оценки цепи по нагреву ("DTCR") и ее эксплуатации.
провода в реальном времени является мерой запаса по пропускной способности или дополнительной пропускной способности, доступной для операторов, если контролируемые пролеты не имеют ограничений по воздушному промежутку (по провисанию) и/или по тепловым параметрам. Это является основой для динамической оценки цепи по нагреву ("DTCR") и ее эксплуатации.
Со ссылкой на Фиг.1, предварительная конструкция системы датчиков обеспечивает очень низкие требования по электропитанию при длительной работе. Подсистемы и составляющие обеспечивают работу с низкой продолжительностью рабочего цикла посредством работы в режиме ожидания, в режиме покоя и в режиме "включено-выключено". Сами преобразователи не нуждаются в электроэнергии, и для большинства вариантов осуществления изобретения ни для какой-либо составляющей системы или ни для какой-либо ее подсистемы не требуется активный (основанный на термоэлектрическом преобразователе) нагрев или охлаждение. Электропитание системы обеспечивает панель 60 кремниевой (Si) солнечной батареи напряжением 30 В, имеющей высокий коэффициент полезного действия (КПД), в комбинации с батареей 65 перезаряжаемых никель-металлгидридных (Ni:MH) (или литий-ионных (Li-ion)) аккумуляторов; они являются источником электроэнергии для импульсного источника 55 питания. Двумя составляющими системами, имеющими наибольшее энергопотребление, являются одноплатный компьютер 35 и передатчик 50 беспроводной связи, потребляющие соответственно 2,64 Вт и, приблизительно, 4 Вт. Максимальное потребление мощности при длительной работе составляет менее 7 Вт. Комбинация панели 60 солнечной батареи и аккумуляторной батареи 65 с высоким КПД, непрерывно подзаряжаемой малым током, обеспечивает электропитание системы в любых условиях. В темноте полностью заряженная аккумуляторная батарея 65 может обеспечивать электропитание системы в течение более 60 часов; время подзарядки при полном солнечном освещении не превышает 7 часов. Принимая во внимание постоянные времени термомеханических характеристик фазных проводов воздушной линии, активная передача сообщений с интервалами 7,5 или 10 минут должна являться вполне достаточной для поддержки всех действий конечного пользователя, связанных с текущим контролем и/или динамической оценкой цепи по нагреву (DTCR). При передаче сообщений каждые 7,5 минут фактический цикл продолжительности потребления энергии составляет приблизительно 6,7%.
В технических дискуссиях по технологии DTCR всегда рассматривают параметры, подлежащие текущему контролю, и типы датчиков, но всегда строят предположения относительно их количества, местоположения и расстоянии между ними. Хорошо известно, что местоположение, трасса, направление, высотная отметка и топография линии, и ее полоса отчуждения, оказывают очень существенное влияние на температуру и, следовательно, на провисание проводов и на просвет верхних пролетов воздушных высоковольтных проводов. Если, например, линия электропередачи имеет протяженность или прямолинейные полосы отчуждения длиной 5, 10, 20 миль или, возможно, большую протяженность на равнинной местности, и, при этом, имеет одно направление по азимуту, то, вероятно, что одиночный датчик, расположенный на определенном пролете (или на критическом пролете), может обеспечить желательную информацию о провисании проводов, ограничивающем допустимую токовую нагрузку провода в амперах, в реальном времени и о температуре. Однако длинные, прямолинейные полосы отчуждения линии электропередачи, проходящие по территориям с одним и тем же типом почвы и типом растительности и на постоянной высоте, не отображают значительную часть протяженности полос отчуждения и линий электропередачи в США.
Обычно имеют место многочисленные изменения направления, топографии и высотных отметок вдоль конкретной линии; такие изменения влияют на падающее солнечное излучение, на скорость ветра, на направление ветра, на температуру и влажность окружающей среды. Изменения топографии, растительности на поверхности и геологии поверхности/местности оказывают существенное влияние на температуру проводов и, следовательно, на его провисание; такие изменения могут часто наблюдаться от одного пролета к другому. Эти факторы, взятые вместе, приводят к тому, что температура и провисание проводов являются очень динамичными и непредсказуемыми. В то время как метеорологические условия, типы погоды и условия окружающей среды могут быть очень сходны в пределах расстояний в 5, 10 или 20 миль, во многих случаях, даже предполагая то, что параметры полосы отчуждения являются статическими на протяжении отрезков времени от минут до часов, наблюдаются существенно различные значения температуры окружающей среды, влажности, скорости/направления ветра в точках, отстоящих одна от другой на такие расстояния.
Очевидно, что исходными местоположениями датчиков или местами их расположения, заданными по умолчанию, являются определенные пролеты5. Однако определенный пролет представляет собой предполагаемый единообразный расчетный пролет, который приближенно отображает характер термомеханического поведения пролета между его жестко закрепленными концами. Он предназначен для проектирования и сооружения линии (вычисляют значения провисания и просветов для определения места установки опор и для подвешивания проводов), но без учета эксплуатации по сезонам и годам. Кроме того, хотя определенный пролет и является логической отправной точкой, его термомеханическое состояние и характер поведения вообще могут не быть характерными для линии в целом.
В качестве реакции на старение инфраструктуры, на значительное увеличение средней нагрузки и на обостряющуюся проблему перегрузок многие энергетические компании, независимые операторы, занимающиеся эксплуатацией, ("ISOs"), и региональные компании, занимающиеся передачей электроэнергии, ("RTOs") теперь, имеют высокоточные данные обследования их линий электропередач и полос отчуждения. Во многих недавних обследованиях основное внимание было сосредоточено на известных линиях, работающих с большой нагрузкой, и на линиях, работающих с перегрузкой, и было выявлено существование так называемых "критических пролетов", то есть пролетов, которые нередко имеют ограничения по провисанию проводов/просвету. Такие критические пролеты являются очевидными претендентами на размещение датчиков. При наличии таких данных обследований обычно имеется возможность определить один наиболее критический пролет, но часто имеются дополнительные пролеты, которые статистически также являются критическими. В результате, конкретная линия, работающая с перегрузкой (или с большой нагрузкой), может содержать дюжину или более критических пролетов, которые указаны или которые могли бы быть указаны как предназначенные для размещения датчика.
Суть дела состоит в том, что в настоящее время отсутствует какое-либо четкое правило или единодушное мнение относительно количества датчиков и расстояния между ними. Каждая из энергетических компаний, региональных компаний, занимающихся передачей электроэнергии, (RTO), и независимых операторов, занимающихся эксплуатацией, (ISO), является отличной от других, каждая линия, работающая с перегрузкой, является уникальной, и "критический пролет", когда речь идет об использовании этого термина для обозначения размещения датчика, по ряду причин (некоторые из которых являются статистическими) различные организации определяют по-разному. Поистине бесспорным фактом является то, что количество датчиков, их местоположение и расстояние между ними определяют в зависимости от конкретного случая, а именно в зависимости от конкретной региональной компании, занимающейся передачей электроэнергии, (RTO), от конкретной линии, работающей с перегрузкой. Если предыстория приобретения интеллектуальных электронных устройств ("IEDs") для применения в системе передачи и распределения ("T&D") электроэнергии является некоторым ориентиром, то поистине бесспорным фактом также является то, что предусмотренное количество датчиков будет обратно пропорциональным общей установочной стоимости6.
Поскольку в линии электропередачи протекает больший электрический ток, то резистивные потери в проводах вызывают увеличение температуры линии, сопровождающееся соответствующим удлинением линейных проводов вследствие теплового расширения. Так как провода поддерживаются в неподвижных точках (например, в опорах), то при увеличении тока происходит изменение высоты провода, и это изменение высоты провода вызывает небольшое изменение поля B, измеренного на уровне земли.
Для того чтобы проиллюстрировать характер поведения вертикальной и горизонтальной составляющих поля B на поверхности земли под линией электропередачи, были выполнены расчеты с использованием простой трехпроводной модели для трехфазной линии электропередачи. Эта модель основана на приближенном решении для полей, в котором используют теорию комплексных изображений для учета эффектов потерь из-за влияния близости земли под линией электропередачи. Однако выясняется, что для точек наблюдения поля, расположенных близко к линии электропередачи, эффекты из-за влияния близости земли являются пренебрежимо малыми.
Геометрия линии и ток
В этом исследовании используют две конфигурации, которые являются типичными для линий электропередачи категории 500 кВ, показанные на чертежах Фиг.2 и Фиг.3. Как показано на Фиг.2, одна линия электропередачи имеет схему расположения фазных проводов 200, 210, 220 по горизонтали, и могут иметься два защитных провода, которые смонтированы симметрично над фазными проводами (не показаны). На Фиг.3 изображена линия электропередачи, в которой провода расположены один над другим по вертикали, с одним верхним защитным проводом и тремя фазными проводами 300, 310, 320.
В этом анализе не учитывают верхние защитные провода и любой ток, который может течь в них. В схеме расположения проводов по горизонтали, показанной на Фиг.2, типичная высота  линии электропередачи равна 17,4 м, а расстояния
линии электропередачи равна 17,4 м, а расстояния  между фазными проводами равны 10,67 м. Для конфигурации, показанной Фиг.3, в которой провода расположены по вертикали, полагают, что высота
между фазными проводами равны 10,67 м. Для конфигурации, показанной Фиг.3, в которой провода расположены по вертикали, полагают, что высота  провода фазы А равна 17,4 м, а расстояния
провода фазы А равна 17,4 м, а расстояния  между фазными проводами равны 9,14 м.
между фазными проводами равны 9,14 м.
Напряжения на линиях, показанных на Фиг.2, сдвинуты по фазе на 120° друг относительно друга. Полагая, что начальная фаза 0° находится в проводах фазы B, линейные напряжения могут быть выражены в векторном представлении на комплексной плоскости следующим образом:
Следует отметить, что эти напряжения являются уравновешенными, то есть их сумма равна нулю: 
Токи, текущие в линиях электропередач, зависят от электрических нагрузок, характерных для линии. Энергетические компании пытаются сбалансировать эти нагрузки таким образом, чтобы линейные токи также являлись сбалансированными. Однако это не всегда возможно и иногда имеет место протекание суммарного тока, или тока нулевой последовательности,  , равного
, равного
Кроме того, поскольку электрические нагрузки на линию могут быть реактивными, то нет ни гарантии того, что токи имеют ту же самую фазу, что и напряжение, ни гарантии того, что фазы являются сдвинутыми одна относительно другой в точности на 120°. Можно ожидать, что с течением времени и амплитуды, и относительные фазы векторов тока будут изменяться в зависимости от состояния электрической нагрузки на линию.
Если предположить, что фазы токов являются одинаковыми с фазами напряжений, то ток нулевой последовательности может быть записан в следующем виде:
 .
.
Оценка магнитной индукции
Для вычисления поля B, созданного воздушной линией электропередачи, отправным пунктом является использование закона Био-Савара7 (Biot-Savart), который предоставляет сведения о магнитном поле  вблизи длинного провода, являющегося носителем квазистатического тока
вблизи длинного провода, являющегося носителем квазистатического тока  . Для теоретически бесконечного провода поле
. Для теоретически бесконечного провода поле  на расстоянии
на расстоянии  от провода, созданное током, ориентировано в направлении
от провода, созданное током, ориентировано в направлении  и описывается следующим уравнением:
и описывается следующим уравнением:

Соответствующая магнитная индукция (поле B) вокруг провода описывается следующим уравнением:
 ,
,
где 
Таким образом, магнитная индукция (поле B) равна
Согласно закону Ленца напряжение разомкнутой цепи, наведенное в катушке из n обмоток провода, площадь которой равна A, связано с временной производной магнитной индукции (поля B), наведенной в катушке, следующим уравнением:
 (в вольтах). (6)
(в вольтах). (6)
Для временной гармоники магнитной индукции (поля B) с частотой  максимальная амплитуда напряжения разомкнутой цепи, наведенного на катушке, описывается следующим уравнением:
максимальная амплитуда напряжения разомкнутой цепи, наведенного на катушке, описывается следующим уравнением:
 (в вольтах). (7)
(в вольтах). (7)
Простая зависимость между магнитной индукцией (полем B) и напряжением разомкнутой цепи, возникающим в контуре, в уравнении (7) означает, что такой контур может быть использован в качестве датчика для измерения поля магнитной индукции (поля B), созданного воздушной линией электропередачи. Соответственно, линия электропередачи может быть смоделирована в виде трех проводов воздушной линии, расположенных в точках  над проводящей поверхностью земли. Для каждого провода в линии электропередачи магнитная индукция (поле B) в месте
над проводящей поверхностью земли. Для каждого провода в линии электропередачи магнитная индукция (поле B) в месте  наблюдения может быть выражена через прямой вклад в форме уравнения (4) плюс вклад, возникающий вследствие наличия потерь из-за влияния близости земли. Выражения для магнитной индукции (поля B) от одиночного проводника над землей уже были выведены Уэйтом (Wait)8 и позже были использованы Олсеном (Olsen)9 для трехфазной линии электропередачи, подобной той, которая показана на Фиг.2.
наблюдения может быть выражена через прямой вклад в форме уравнения (4) плюс вклад, возникающий вследствие наличия потерь из-за влияния близости земли. Выражения для магнитной индукции (поля B) от одиночного проводника над землей уже были выведены Уэйтом (Wait)8 и позже были использованы Олсеном (Olsen)9 для трехфазной линии электропередачи, подобной той, которая показана на Фиг.2.
Из публикации Олсена (Olsen) известно, что составляющие магнитной индукции (поля B) в декартовой системе координат в точке  описываются суммой трех членов, вызванных токами в каждом проводе, следующим образом:
описываются суммой трех членов, вызванных токами в каждом проводе, следующим образом:


В приведенных выше выражениях первый член в скобках отображает прямой вклад магнитной индукции (поля B) от провода, а второй член является результатом влияния близости земли. Этот второй член выглядит как изображение провода воздушной линии электропередачи в земле на комплексном расстоянии  , где
, где  - высота рассматриваемого провода, а α - зависящее от частоты комплексное расстояние, описываемое следующим уравнением:
- высота рассматриваемого провода, а α - зависящее от частоты комплексное расстояние, описываемое следующим уравнением:

Члены r1 и r2 представляют собой расстояния, соответственно, от провода и от изображения до точки наблюдения и описываются следующими уравнениями:


Влияние близости земли на магнитную индукцию (поле B)
Для того чтобы проиллюстрировать характер поведения магнитной индукции (поля B), созданной воздушной линией электропередачи, и оценить влияние проводящей поверхности земли, полезно рассмотреть линию электропередачи с одним проводом (например, линию электропередачи, подобную той, которая показана на Фиг.2, в которой ток течет только по фазе B 200). Для линии электропередачи высотой 10,3 м на Фиг.8 представлен график нормированной вертикальной составляющей  магнитной индукции (поля B) на частоте 60 Гц для различной проводимости земли, полученный с использованием строгого анализа Уэйта (Wait) и приближенного анализа изображений, описанного Олсеном (Olsen). Ось абсцисс этого графика отображает расстояние по горизонтали от линии электропередачи до точки наблюдения, и заметно, что вблизи линии электропередачи комплексное изображение и точные модели хорошо согласуются, и что влияние близости земли не является очень существенным.
магнитной индукции (поля B) на частоте 60 Гц для различной проводимости земли, полученный с использованием строгого анализа Уэйта (Wait) и приближенного анализа изображений, описанного Олсеном (Olsen). Ось абсцисс этого графика отображает расстояние по горизонтали от линии электропередачи до точки наблюдения, и заметно, что вблизи линии электропередачи комплексное изображение и точные модели хорошо согласуются, и что влияние близости земли не является очень существенным.
Реальная почва имеет удельную электропроводность  , между 0,1 и 0,0001 сименса на метр (См/м). Из Фиг.9 видно, что для этого интервала удельной электропроводности отклик магнитной индукции (поля B) для точек наблюдения, расположенных на расстоянии менее 200 метров от линии электропередачи, почти равен отклику магнитной индукции (поля B) одиночного фазного провода. Таким образом, вблизи от линии влияние близости земли является пренебрежимо малым, и второй член в скобках в уравнении (8) может быть опущен. Магнитную индукцию (поле B) вычисляют только по вкладам от токов фазных проводов.
, между 0,1 и 0,0001 сименса на метр (См/м). Из Фиг.9 видно, что для этого интервала удельной электропроводности отклик магнитной индукции (поля B) для точек наблюдения, расположенных на расстоянии менее 200 метров от линии электропередачи, почти равен отклику магнитной индукции (поля B) одиночного фазного провода. Таким образом, вблизи от линии влияние близости земли является пренебрежимо малым, и второй член в скобках в уравнении (8) может быть опущен. Магнитную индукцию (поле B) вычисляют только по вкладам от токов фазных проводов.
Анализ Фиг.2 и Фиг.3
Полезно составить график магнитной индукции (поля B) под трехпроводной линией, показанной на Фиг.2. Фиг.2 содержит график магнитного поля для трехпроводной линии с трехфазным током, имеющим разности фаз 120° и амплитуду 400 ампер (А). Вертикальная  составляющая магнитной индукции (поля B) достигает максимума под центральной фазой (200), а горизонтальная
составляющая магнитной индукции (поля B) достигает максимума под центральной фазой (200), а горизонтальная  составляющая является максимальной в точке, приблизительно соответствующей
составляющая является максимальной в точке, приблизительно соответствующей  ± 14 метров, которая является близкой к местам расположения (210 и 220) внешних фазных проводов по горизонтали.
± 14 метров, которая является близкой к местам расположения (210 и 220) внешних фазных проводов по горизонтали.
На Фиг.2 видно, что максимальная амплитуда магнитной индукции (поля B) является, приблизительно, в 3 меньшей, чем в случае трехпроводной линии с теми же самыми величинами токов и идентичными фазами.
Интересно рассмотреть характер поведения магнитной индукции (поля B) на поверхности земли под альтернативным вариантом линии электропередачи, показанной на Фиг.3, в которой провода расположены один над другим по вертикали. На Фиг.3 показаны вертикальная и горизонтальная составляющие магнитной индукции (поля B) под этой линией, и следует отметить, что характер поведения этих составляющих является обратным характеру их поведения для линии с горизонтальной схемой расположения проводов. Иными словами, для линии, в которой провода 300, 310, 320 расположены один над другим по вертикали, горизонтальная  составляющая магнитной индукции (поля B) является максимальной под линией электропередачи, а вертикальные
составляющая магнитной индукции (поля B) является максимальной под линией электропередачи, а вертикальные  поля являются максимальными при
поля являются максимальными при  = ± 14 метров.
= ± 14 метров.
Влияние тока нулевой последовательности
Для оценки важности наличия тока нулевой последовательности, текущего в линии электропередачи, показанной на Фиг.2, была использована вычислительная модель с фазными токами A и C, равными 1300 A, которые находятся вблизи максимума. Ток фазы B 200 равен 1300 +  , где допускается изменение тока
, где допускается изменение тока  нулевой последовательности от 0 до 100 A. Каждый из этих токов имеет сдвиг по фазе, равный 120° относительно других токов.
нулевой последовательности от 0 до 100 A. Каждый из этих токов имеет сдвиг по фазе, равный 120° относительно других токов.
Максимальные значения магнитной индукции (полей B) являются сравнительно нечувствительными к наличию тока нулевой последовательности. За счет размещения датчиков магнитной индукции в этих местах, соответствующих максимальному полю, система предоставляет полезные данные для оценки провисания проводов линии. В этом отношении первоначальное размещение датчиков не должно быть произвольным, а вместо этого для повышения точности система аппроксимирует наиболее чувствительные места расположения для размещения датчиков.
Оценки провисания линии
При помощи вычислительной модели для магнитной индукции (поля B) возможно исследовать и производить оценку различных стратегий для оценки провисания линии электропередачи вследствие нагрева линии. Некоторые из этих стратегий требуют дальнейшего изучения, но первым этапом в разработке способа оценки провисания линии является исследование того, как изменяются измеренные магнитные индукции (поля B) на поверхности земли при изменении высоты линии.
К тому же, в системе из этого изобретения значение высоты линии вычисляют c довольно высокой точностью, как показано на Фиг.10, для решения проблем, связанных с провисанием линии.
Компьютеризированный способ анализа воздушных линий передачи и распределения электроэнергии
На фоне вышеизложенных обсуждений следует отметить, что использование компьютеризированных систем для реализации вычислений для определения величины тока, фазы тока и высоты фазного провода для любой конкретной воздушной системы передачи и распределения электроэнергии не выходит за пределы объема патентных притязаний этого изобретения. Эти параметры могут быть затем использованы для моделирования других факторов, таких как, например, температура линии, провисание, просвет, допустимая токовая нагрузка провода в амперах и пропускная способность линии электропередачи. Как показано на Фиг.1-3, в компьютеризированной системе из этого изобретения используют пары ортогонально ориентированных датчиков 10, 12, 14, 16, 18 и 20 магнитного поля с взаимной компенсацией электрического поля, расположенных под фазными проводами 200, 210, 220, 300, 310, 320 воздушной линии электропередачи. Каждый датчик в паре регистрирует одну из двух соответствующих составляющих x или y магнитного поля, создаваемого фазными проводами воздушной линии. Датчики расположены на расстоянии от фазных проводов и, следовательно, не создают помех для системы передачи электроэнергии. Составляющие магнитного поля, создаваемого линиями, наводят соответствующие напряжения разомкнутой цепи на каждом датчике, которые служат в качестве входных сигналов, подаваемых в более крупную компьютеризированную систему для вычисления других интересующих параметров в модели.
Каждый датчик (например, датчик 10) в системе представляет собой устройство, способное измерять пространственную фазу и величину магнитного поля, создаваемого фазным проводом. Датчик 10 имеет, по меньшей мере, одну пару параллельных проводящих обмоток 21-23, 22-24 противоположной полярности, относительно общей земли. Обмотки противоположной полярности, по существу, взаимно компенсируют сигнал электрического поля в обмотках и генерируют напряжение разомкнутой цепи между незаземленными концами каждой обмотки. Результатом является то, что два полезных сигнала магнитного поля, поступающие из катушек, представляют собой положительное и отрицательное зеркальные отражения друг друга. Сигнал электрического поля является одинаковым на обоих выводах катушек. Путем использования в электронных схемах устройства с дифференциальным входом сигнал электрического поля подавляют как помеховый сигнал, а дифференциальный сигнал магнитного поля режима сохраняют.
В одном из вариантов осуществления изобретения обмотки 21-23, 22-24 охватывают площадь, по меньшей мере, 150 квадратных метров. Обмотки намотаны вокруг, по существу, цилиндрической катушки таким образом, что каждая обмотка по отдельности намотана вокруг соответствующих поперечных утолщений катушки, расположенных рядом друг с другом. В предпочтительном варианте осуществления изобретения обмотки выполнены из одинакового материала, одинаковым образом соединены, и имеют одинаковый радиус обмоток. Катушка содержит сердечник, который может быть выполнен из феррита, из сплава никеля и железа или из метгласса.
Напряжение, наведенное на каждом датчике, связано с его положением относительно фазных проводов воздушной линии, с количеством контуров или обмоток в катушках датчика и со скоростью изменения магнитного поля, источником которого являются фазные провода. Нужно иметь в виду, что катушки являются чувствительными к производной сигнала магнитного поля по времени. Следствием этого является то, что эти катушки имеют вдвое большую чувствительность ко второй гармонике основной частоты (например, в данном случае основная частота равна 60 Гц). Катушки имеют втрое большую чувствительность к третьей гармонике, и т.д. В одном из вариантов осуществления изобретения датчик расположен достаточно близко к фазному проводу воздушной линии электропередачи, вследствие чего напряжение разомкнутой цепи между обмотками составляет, по меньшей мере, 100 мВ переменного тока. В более предпочтительном варианте осуществления изобретения значения напряжения разомкнутой цепи находятся в интервале от, приблизительно, 100 мВ до, приблизительно, 400 мВ переменного тока.
Желательно чтобы система работала в пределах такого частотного диапазона, который предотвращает работу катушек или обмоток в каждом датчике 10 на резонансной частоте. Поэтому катушки сконфигурированы таким образом, что имеют резонансную частоту с центром на частоте 4 кГц или на более высокой частоте. Когда основная частота, представляющая интерес, равна, приблизительно, 60 Гц, то система согласно этому изобретению работает на частоте значительно более низкой, чем резонансная частота катушек, для обеспечения более управляемого и более устойчивого отклика. Катушки в датчиках из этого изобретения конструированы таким образом, чтобы емкость между обмотками была чрезвычайно низкой (приблизительно, 0,5 нанофарады (нФ)), и эта низкая емкость выводит резонансную частоту из желательного диапазона частот в области 4 кГц или выше.
Следует отметить, что выходной сигнал датчика 10 зависит от нагрузки на катушках в этом датчике 10, определяемой электронными схемами на входе. Если нагрузка является "высокоимпедансной", то из катушки почти не выходит электрический ток, и измеренным выходным сигналом является напряжение. Если же нагрузка является "низкоимпедансной", то в этом случае из катушки выходит значительный электрический ток. Следовательно, существует возможность использования низкоимпедансной системы, основанной на измерении наведенного тока из датчиков для вычисления желательных значений для воздушной системы передачи и распределения.
Как указано выше, датчики работают попарно и расположены ортогонально, не пересекаясь друг с другом, для того чтобы регистрировать только составляющие x и y магнитных полей переменного тока, созданных фазным проводом. Вертикально расположенный датчик (например, датчик 12) имеет горизонтальную ось и обеспечивает измеряемое напряжение, наведенное составляющей x магнитного поля. Горизонтально расположенный датчик (например, датчик 10) имеет вертикальную ось и обеспечивает измеряемое напряжение, наведенное составляющей y магнитного поля. Как показано на Фиг.1, в наиболее предпочтительном варианте осуществления изобретения используют три пары ортогонально ориентированных датчиков 10, 12, 14, 16, 18, 20, расположенных на поверхности земли под тремя фазными проводами воздушной линии.
На Фиг.4 и Фиг.5 показаны дальнейшие подробности используемого датчика согласно этому изобретению. Датчик 10 имеет две обмотки 10a, 10b, расположенные рядом друг с другом по толщине датчика в поперечном сечении. Первая обмотка 10a начинается в конце 22, ближайшем к сердечнику датчика, и намотана вокруг окружности сердечника на желательное количество оборотов, таким образом, она заканчивается свободным концом 23 на внешней окружности датчика. Вторая обмотка начинается в конце 24, ближайшем к сердечнику датчика, и намотана вокруг окружности сердечника на желательное количество оборотов, заканчиваясь свободным концом 21 на внешней окружности датчика 10. Как показано на Фиг.5, первый (расположенный возле сердечника) конец 22 второй обмотки 10b и свободный конец 21 первой обмотки 10a соединены с общей землей. В этом случае возможно измерение дифференциального напряжения между обмотками, снимаемого со свободного конца 23 второй обмотки 10b и первого (расположенного возле сердечника) конца 24 первой обмотки 10a.
Одна полезная особенность проведения измерений дифференциального напряжения таким способом состоит в том, что обмотки 10a и 10b противоположной полярности взаимно компенсируют электрические поля, сгенерированные в обмотках. Электрическое поле ненужно для системы из этого изобретения и только искажает желательные результаты измерений напряжения. За счет взаимной компенсации электрических полей, сгенерированных в обмотках 10a и 10b, система из настоящего изобретения обеспечивает более точные измерения напряжения, связанные только лишь с магнитным полем, создаваемым фазными проводами воздушной линии.
Продолжая описание чертежа Фиг.1, напряжения разомкнутой цепи, полученные из датчиков, представляют собой дифференциальные входные сигналы, подаваемые в соответствующий фильтр нижних частот для каждого датчика. Эта фильтрация удаляет высшие гармоники и предоставляет в следующую операцию способа только те данные, которые представляют интерес. В соответствии со стандартными конструктивными соображениями фильтр нижних частот может представлять собой резистивно-емкостный (RC) фильтр и, в частности, может представлять собой фильтр нижних частот с частотой среза, равной, приблизительно, 98 Гц.
Затем выполняют снятие аналоговых измерений напряжения аналого-цифровым преобразователем (АЦП) 25, для преобразования обрабатываемых данных в цифровую форму. В одном из вариантов осуществления изобретения аналого-цифровой преобразователь имеет восемь каналов и выполняет снятие сигналов напряжения с частотой 8000 выборок в секунду, создавая 16-разрядное число, отображающее каждое напряжение, измеренное в реальном времени на парах обмоток в каждом датчике. Путем включения генератора колебаний в состав конструкции аппаратуры настоящее изобретение улучшает рабочие характеристики АЦП 25 и обеспечивает удобное средство вычисления частоты сигналов напряжения.
Само собой разумеется, что напряжения наводятся в обмотках каждого датчика в ответ на магнитное поле от фазных проводов в воздушной системе передачи и распределения. Согласно этому изобретению числа, отображающие напряжения в цифровом формате, подают в компьютерное устройство 35 обработки данных для анализа. Представленные в цифровом виде сигналы напряжения обеспечивают основу для способности системы определять величину тока в каждом фазном проводе воздушной линии, фазы и частоты этих токов, высоту, провисание и просвет для каждого фазного провода, пропускную способность и допустимую токовую нагрузку каждого провода в амперах и температуру линий.
Для обеспечения средств калибровки, данных о датчиках и общей проверки системы на Фиг.1 показан лазерный дальномер, предназначенный для выполняемого вручную измерения высоты проводов от датчика и для определения географических положений датчиков. Однако настоящее изобретение охватывает возможность использования предварительно заполненной базы данных для учета этой информации. Все данные измерений в полевых условиях могут быть переданы по обычной или беспроводной сети (например, по сети Интернет) в другие компьютеры и в другие центры обработки данных, расположенные на удалении от места сбора данных. Наконец, на Фиг.1 также показан резервный аккумулятор и панель солнечной батареи, которые обеспечивают возможность установки в полевых условиях без подключения к отдельному источнику питания.
Кроме того, система содержит модуль обработки данных, реализованный в виде программного обеспечения, который предназначен для обработки цифровых данных, отображающих выходные сигналы напряжения из датчиков в реальном времени. Модуль обработки данных разделен на два исполняемых модуля. Первый исполняемый модуль выполняет сбор информации в реальном времени. Второй исполняемый модуль выполняет анализ либо в реальном времени, либо автономно.
Модуль сбора информации, входящий в состав системы обработки данных, содержит цифровой полосовой фильтр, предназначенный для отделения основной частоты потока данных, отображающего каждый сигнал напряжения в реальном времени. Модуль сбора информации может быть дополнительно разделен на модуль определения фазы, предназначенный для распознавания фазы каждого сигнала напряжения, и модуль определения амплитуды, предназначенный для распознавания амплитуды каждого сигнала напряжения. Более подробное описание каждого из этих модулей приведено ниже.
В одном из вариантов осуществления настоящего изобретения модуль определения фазы вычисляет скалярное произведение вектора (то есть, одномерного массива) выборок данных и вектора, содержащего синусоиду частотой 60 Гц, для получения значения Q. Кроме того, этот модуль вычисляет скалярное произведение выборок данных и вектора, содержащего косинусоиду частотой 60 Гц, для получения значения I. Наконец, значение arctan(Q/I) дает фазу данных. "I" означает "синфазный", а "Q" означает "квадратурный". Эта процедура также известна как "скалярное произведение" двух векторов. Фазы могут быть отрегулированы путем сдвигов фазы в катушках, но это не является обязательным условием.
Настоящее изобретение также может содержать модуль определения амплитуды, который включает в себя средство вычисления действующего значения напряжения в вольтах для каждого канала, находящееся в аналого-цифровом преобразователе 25. Амплитуды масштабируют на измеренные значения чувствительности катушки для того, чтобы теперь данные были представлены в единицах вольт на квадратный метр. Следовательно, если на катушке X наблюдалось напряжение 1 вольт, и если ее площадь составляла 1000 квадратных метров, то новое значение было бы равно 0,001. Этот этап позволяет облегчить сравнение с результатами моделирования. Затем выполняют сглаживание (низкочастотную фильтрацию) данных по амплитуде и фазе фильтром с конечной импульсной характеристикой.
Более подробный пример модуля обработки данных содержит аналого-цифровые преобразователи (АЦП), собирающие считываемые данные напряжения с частотой считывания 8000 показаний в секунду в течение 4 секунд. Эти 32000 чисел из каждого АЦП отсылают в компьютерное устройство 35 обработки данных после задержки в 1 секунду, таким образом, компьютер получает 256000 чисел каждые 5 секунд. В предпочтительном варианте осуществления изобретения каждый из шести датчиков в системе посылает данные в один из 8 каналов в аналого-цифровом преобразователе. Седьмой канал используют для синхронизации, и восьмой канал является резервным.
Сигналы из аналого-цифровых преобразователей содержат желательные синусоидальные/косинусоидальные составляющие частотой 60 Гц, но они также содержат высшие гармоники, которые должны быть отфильтрованы для того, чтобы программное обеспечение работало надлежащим образом. Для этого программное обеспечение отфильтровывает любые сигналы частотой выше 72 Гц и ниже 48 Гц. Это делают путем "свертки" этих 32000 чисел с "ядром фильтра", которое представляет собой перечень из 2001 числа. Свертка представляет собой способ, при котором берут два перечня чисел (два массива) и формируют из них перечень средневзвешенных значений. Поскольку ядро фильтра построено так, как предписано известными стандартами, то средневзвешенное значение сохраняет сигналы в интервале частот между 48 Гц и 72 Гц. Очищенный перечень чисел является более коротким, чем исходный перечень, поэтому теперь сигнал имеет длину, равную всего лишь 29999 выборкам, которая является более чем достаточной для изложенных здесь целей.
Хотя для получения фазы можно было бы выполнить проверку того, когда напряжения АЦП проходят через ноль, более точным способом реализации этого является следующий:
1. Обработка предварительно отфильтрованных сигналов АЦП методом "окна". То есть если сигнал АЦП имеет длину, равную 29999 числам, то составляют другой перечень чисел, также имеющий длину, равную 29999 числам, которые начинаются с нуля, постепенно возрастают, а затем постепенно обратно спадают до нуля. Затем каждое число из АЦП умножают на соответствующее число из перечня. Это приводит к тому, что вначале сигнал АЦП становится равным нулю, затем постепенно возрастает таким образом, что становится похожим на синусоиду, а затем постепенно уменьшается и спадает до нуля при последнем 29999-м числе. В одном из вариантов осуществления изобретения функцией окна является окно Блэкмена (Blackman). Окно Блэкмена предотвращает внезапные и резкие изменения в данных (то есть, мгновенное возрастание от нуля до более высокого значения), которые вызывают погрешности в последующих частях системы.
2. Создание идеальной синусоиды частотой 60 Гц в запоминающем устройстве компьютера. Она является "эталонной синусоидой" и, подобно значениям из АЦП, она имеет длину, равную 29999 числам.
3. Создание идеальной косинусоиды частотой 60 Гц, имеющей длину, равную 29999 числам, которая сдвинута вперед на 90 градусов относительно синусоиды.
4. Умножение каждого числа эталонной синусоиды на соответствующее число из АЦП и суммирование всех этих произведений. Эту составляющую именуют составляющей "I" или "синфазной" составляющей.
5. Аналогичным образом выполняют умножение каждого числа эталонной косинусоиды на соответствующее число из АЦП и суммирование всех этих произведений. Эту составляющую именуют составляющей "Q" или "квадратурной" составляющей.
6. В этот момент можно вычислить арктангенс величины I, деленной на Q. Это дает фазу сигнала в радианах. Однако поскольку величина Q может быть равна нулю, и деление на ноль вызывает проблемы в программном обеспечении, то лучшим способом является использование специализированной легкодоступной программы, именуемой "atan2". Эта программа берет I и Q и вычисляет угол без каких-либо проблем деления на нуль. Угол на выходе получают в радианах, но он может быть преобразован в градусы.
Для вычисления амплитуды сигнала начинают с выходных данных обработки методом "окна" этапа 1 из процедуры нахождения фазы. При помощи перечня из 29999 чисел вычисляют среднеквадратичное действующее значение перечня (то есть, возводят каждое число в квадрат, суммируют все квадраты, делят на 29999 и берут квадратный корень). Затем результат умножают на поправочный коэффициент для учета того факта, что окном Блэкмена была удалена некоторая часть сигнала в начале и в конце. Это значение является искомой амплитудой сигнала из АЦП. Единицей измерения является действующее значение напряжения в вольтах.
Другая подробность заключается в следующем: для того чтобы сэкономить ресурсы процессора, можно сделать различные оптимизации сборщика. Одна оптимизация состоит в том, что вместо приведения в соответствие трех отдельных токов, передаваемых по проводам, программное обеспечение фактически приводит в соответствие отношение токов на внешних фазных проводах 210, 220, 310, 320. В этом случае для обеспечения согласованности часть "Q", соответствующая амплитудам сигнала из катушки, основана на отношении амплитуд сигнала из катушки. Результатом является сокращение количества известных и неизвестных величин на единицу.
Аналогичным образом, вместо приведения в соответствие трех фаз токов, передаваемых по проводам, система приводит в соответствие разность фаз токов на внешних фазных проводах 210 и 220 по сравнению с током на среднем проводе 200. Это сокращает количество известных и неизвестных величин на единицу. Следовательно, программное обеспечение фактически работает с пятью неизвестными величинами и с шестью 6 известными величинами.
В целом настоящее изобретение предоставляет компьютеризированный способ дистанционного измерения физической высоты, по меньшей мере, трех фазных проводов в системе передачи и распределения электроэнергии в дополнение к величине и фазе токов в фазном проводе. Способ содержит следующие этапы: размещают пару ортогонально ориентированных датчиков магнитного поля с взаимной компенсацией электрического поля под каждым проводом таким образом, что магнитное поле фазного провода генерирует напряжение разомкнутой цепи между соответствующими концами катушек в датчиках. Затем способ обеспечивает измерение напряжений разомкнутой цепи на каждом датчике и системное программное обеспечение, работающее в компьютерном устройстве обработки данных, которое предназначено для определения параметров высоты, амплитуды и фазы в системе.
В программном обеспечении из этого изобретения используют технологию сборщика для вычисления интересующих параметров, исходя из значений напряжения, наведенного на датчиках. Сборка содержит две части: моделирование магнитного поля и программу итерационных вычислений, которая пытается сделать так, чтобы собранные значения совпадали с данными измерений. Одним из примеров программы сборки показан на Фиг.11. Моделирование поля имеет следующие входные данные, все из которых изначально являются предполагаемыми значениями:
• Высоты проводов. Предполагают, что все они являются одинаковыми.
• Три отдельных тока, передаваемых по проводам, представленные как действующее значение тока в амперах.
• Фазы трех отдельных токов в проводах, выраженные в градусах.
Кроме того, при моделировании необходимо знать положения четырех катушек в направлениях влево-вправо и вверх-вниз, и их ориентации. Для сбора этих данных может быть использован лазерный дальномер.
По этим данным процедура моделирования прогнозирует, какими должны быть выходные сигналы катушек: амплитуды (в вольтах на квадратный метр) и фазы (в градусах) четырех катушек. В одном из вариантов осуществления изобретения программа аппроксимации выполняет следующие этапы:
1. Она предоставляет в программу моделирования предполагаемые значения 7 неизвестных значений, перечисленных выше.
2. Она сравнивает фазы четырех катушек и амплитуды четырех катушек (8 известных значений), спрогнозированные путем моделирования, с измеренными значениями для вычисления величины погрешности.
3. Сборщик изменяет 7 неизвестных величин и предпринимает еще одну попытку подбора значений. Если погрешность уменьшается, то он сохраняет лучшее значение.
4. Эту процедуру продолжают в течение некоторого приемлемого количества итераций.
Наилучшие соответствия образуют набор решений, включающий в себя высоту проводов, токи и фазы. Легко заметить, что система вычисляет 7 неизвестных величин по 8 измеренным данным. Следовательно, теоретически задача является переопределенной.
В более предпочтительном варианте осуществления изобретения операции, выполняемые сборщиком, содержат следующие этапы: присваивают начальные оценочные значения параметрам системы, причем эти параметры включают в себя высоту каждого фазного провода, значения токов в фазных проводах и фазы этих токов, и определяют реальные значения высоты фазных проводов, токов в фазных проводах и фаз токов путем приведения в действие итерационного цикла в компьютерной программе. Итерационный цикл содержит следующие этапы:
(i) вычисляют ожидаемое значение соответствующих комплексных напряжений разомкнутой цепи на датчиках, которое должно являться следствием использования присвоенных начальных оценочных значений высоты, тока и фазы для каждого фазного провода;
(ii) вычисляют погрешность между измеренными напряжениями разомкнутой цепи на каждом датчике и ожидаемыми напряжениями разомкнутой цепи на каждом датчике;
(iii) по меньшей мере, одному из параметров, которыми являются высоты, токи и фазы фазных проводов, присваивают новое оценочное значение;
(iv) итерационным способом выполняют вычислительные операции (i), (ii) и (iii) посредством компьютерного устройства обработки данных таким образом, чтобы минимизировать погрешность между ожидаемыми комплексными напряжениями разомкнутой цепи и измеренными комплексными напряжениями разомкнутой цепи на каждом датчике; и
(v) определяют набор реальных значений высоты каждого фазного провода, величины тока в каждом фазном проводе и фазы тока в каждом фазном проводе из тех значений, определенных итерационным способом, при которых была минимизирована погрешность для всех параметров системы.
Этап присвоения начальных значений содержит присвоение начальных значений высоты, тока и фазы для каждого из трех фазных проводов, а этап вычисления спрогнозированного напряжения на каждой соответствующей катушке содержит вычисление магнитного поля, зарегистрированного каждой катушкой, от каждого из трех фазных проводов. Этап присвоения нового начального оценочного значения высоты, тока и фазы в фазном проводе содержит оценку того, уменьшается ли или возрастает ли величина погрешности при увеличении или уменьшении оценочного значения на известную величину, именуемую значением возмущения для этого параметра.
В другом варианте осуществления настоящее изобретение характеризуется как компьютеризированный способ удаленного измерения физических параметров, связанных с системой передачи и распределения электроэнергии, причем эти параметры включают в себя физическую высоту, по меньшей мере, трех фазных проводов в системе передачи и распределения электроэнергии, и величину и фазу тока в каждом фазном проводе. Способ, согласно этому изобретению, содержит следующие этапы: размещают, по меньшей мере, три пары ортогонально ориентированных датчиков магнитного поля с взаимной компенсацией электрического поля таким образом, что магнитное поле каждого фазного провода генерирует напряжение разомкнутой цепи между соответствующими концами катушек в датчиках, измеряют напряжения разомкнутой цепи на каждом датчике, и посредством компьютерного устройства обработки данных приводят в действие команды программного обеспечения, управляющего компьютером, для определения значений параметров системы в реальном времени.
Программное обеспечение может включать в себя команды, реализующие следующие этапы:
(i) присвоение начальных оценочных значений неизвестных параметров системы для каждого из трех фазных проводов, причем эти параметры системы включают в себя соответствующую высоту каждого фазного провода, величину тока в соответствующем фазном проводе и фазу соответствующего тока;
(ii) вычисление ожидаемого значения соответствующих комплексных напряжений разомкнутой цепи на каждом датчике, получаемого в результате использования присвоенных начальных оценочных значений параметров системы;
(iii) вычисление погрешности E0 между измеренными напряжениями разомкнутой цепи на каждом датчике и спрогнозированными напряжениями разомкнутой цепи на каждом датчике, и
(iv) вычисление реальных значений параметров системы путем приведения в действие итерационного цикла вычислений для каждого датчика.
В предпочтительном варианте осуществления программного обеспечения итерационный цикл вычислений содержит следующие этапы:
(i) выбирают параметр системы для регулирования;
(ii) выполняют приращение выбранного параметра системы на величину возмущения;
(iii) вычисляют спрогнозированное значение соответствующих комплексных напряжений разомкнутой цепи на датчике, которое должно являться следствием использования увеличенного параметра системы в сочетании с присвоенными начальными оценочными значениями для остальных параметров;
(iv) вычисляют погрешность E+ между измеренными напряжениями разомкнутой цепи на датчике и спрогнозированными напряжениями разомкнутой цепи на датчике;
(v) выполняют отрицательное приращение выбранного параметра системы на величину возмущения;
(vi) вычисляют спрогнозированное значение соответствующих комплексных напряжений разомкнутой цепи на датчике, которое должно являться следствием использования уменьшенного параметра системы в сочетании с присвоенными начальными оценочными значениями для остальных параметров;
(vii) вычисляют погрешность E- между измеренным напряжением разомкнутой цепи на датчике и спрогнозированным напряжением разомкнутой цепи на датчике;
(viii) запоминают значение выбранного параметра, минимизирующее величину погрешности;
(ix) выбирают следующий параметр системы для регулирования, обеспечивая циклически повторяющийся выбор параметров системы;
(x) итерационным способом выполняют вычислительные операции (ii)-(ix) для определения того, какой именно набор значений параметров системы минимизирует значения погрешности между спрогнозированными комплексными напряжениями разомкнутой цепи на датчиках и измеренными комплексными напряжениями разомкнутой цепи на датчиках. В компьютеризированном способе итерационный цикл вычислений выполняют одновременно для каждого датчика.
Как отмечено в описанных выше вариантах осуществления изобретения, способ содержит операцию цифрового снятия напряжений разомкнутой цепи на каждом датчике (например, с частотой 8000 выборок в секунду) и операцию определения частоты тока в каждом фазном проводе путем сравнения реальных параметров системы с генератором колебаний. В описанном здесь способе и в описанной здесь системе при вычислении ожидаемых напряжений разомкнутой цепи вычисляют магнитную индукцию, при этом каждый датчик работает для конкретного набора параметров системы. Что касается этапа (viii) из описанного выше итерационного цикла вычислений, а именно этапа вычисления значения выбранного параметра, минимизирующего величину погрешности, то в предпочтительном варианте способа выполняют вычитание отношения, полученного из дифференциальных уравнений, из выбранного значения параметра системы. В частности, отношение, полученное из дифференциальных уравнений, определяют путем вычисления первой производной функции погрешности системы, деленной на вторую производную функции погрешности системы. Это полезное вычисление было, прежде всего, реализовано вследствие того факта, что функция погрешности, используемая в этом способе, представляет собой квадратное уравнение.
Более подробное описание этапов, выполняемых сборщиком, является полезным для понимания изобретения. Когда сборщик вызывают впервые, то должно быть предоставлено некоторое исходное предположение относительно "ответа". Этим предположением может являться следующее: высота проводов равна 18 метрам, токи во всех проводах равны 100 амперам, а фазы равны +120, 0, -120. Фазы также могут быть изменены на противоположные -120, 0 и +120. Следующим этапом является вычисление величины, именуемой "погрешностью", или "E" для краткости. Если предположение является совершенно правильным, то погрешность является настолько малой, насколько это возможно, и близкой к нулю. Формально это именуют "минимизацией погрешности". Для изложенных здесь целей термин "минимизация" используют в смысле принудительного уменьшения величины погрешности, чтобы она была как можно более близкой к нулю. Невозможно чтобы когда-либо погрешность была точно равной нулю, поскольку, как объяснено ниже, погрешность равна сумме квадратов отдельных погрешностей, а функция возведения в квадрат делает все части погрешности положительными, и эти части всегда будут иметь, по меньшей мере, некоторую погрешность из-за источников шумов, таких как, например, АЦП, и внешних помех. В любом случае чем в большей степени предполагаемое значение параметра является неправильным, тем большей является величина E.
На данном этапе вычисление представляет собой обычный логический цикл. По мере итерационного зацикливания программы она проходит через перечень регулируемых параметров. Ими являются значения высоты фазных проводов (предполагают, что все они являются одинаковыми), токов в проводах и фаз. Для каждого из этих параметров имеется перечень величин Di возмущения, которые представляют собой небольшие изменения высоты (на 1 см), небольшие изменения тока (изменение на 1%) и небольшие изменения фазы (на 0,01 градуса). Если величина возмущения равна нулю, то тогда этот сигнал не отрегулирован для этого параметра, и цикл является пустым. Это удобно, поскольку фаза среднего провода всегда равна нулю, и поэтому отсутствует необходимость в ее регулировке.
Сначала обращаются к уже вычисленной погрешности E0. Компьютерная программа регулирует текущий оцененный параметр и уменьшает его на величину возмущения, соответствующую этому параметру. Затем компьютерная программа вычисляет погрешность для этого отрегулированного значения параметра и именует это значение как E-. Компьютерная программа также идет в противоположном направлении, увеличивая параметр на величину возмущения и вычисляя погрешность E+. Используя E0, E- и E+, компьютерная программа вычисляет новое, лучшее значение этого параметра. Формула для получения нового значения Xi имеет следующий вид:
• Новое Xi=Xi-(E'/E"), где E' - первая производная, а E" вторая производная E(Xi),
• E'=((E+)-(E-))/(2Di) снова, где Di - величина возмущения,
• E"=((E+)+(E-)-(2E0))/(Di2).
Система теперь имеет новое Xi, но в случае фаз новое значение Xi может находиться за пределами "допустимого" интервала от -180 до +180 градусов. В этом случае компьютерная программа либо добавляет, либо вычитает 360 градусов, чтобы "вернуть" это значение обратно в указанный интервал. Новое значение Xi используют для вычисления новой погрешности E0, и цикл продолжается до тех пор, пока погрешность не будет находиться в пределах заданного допустимого отклонения.
Если при анализе данных используют вышеописанную операцию оптимизации ресурсов с использованием отношений токов и разностей фаз, то следующим этапом является преобразование отношений токов в проводах в действительные значения токов. Для этого система берет напряжение из одной из катушек (например, из катушки, регистрирующей Bx) и делит его на ту величину, которая была получена в результате работы сборщика для этого тока. Это отношение является большой величиной, которую умножают на токи в проводах для получения реальных значений тока в кабелях.
С еще одной точки зрения сигнал погрешности, по существу, представляет собой результат сравнения комплексных напряжений из катушек с комплексными напряжениями из программы, именуемой "прогнозирование формы колебаний", которая "прогнозирует" то, что было бы зарегистрировано посредством катушек, на основании предполагаемых значений параметров, именуемых в целом как Xi. Если спрогнозированные напряжения на катушках точно совпадают с измеренными напряжениями, то погрешность равна нулю. Величина E (где обозначение D используют в качестве обозначение "дельты") равна:
• E=(Dv12+Dv22+..+Dv62)Wv+(Dp12+Dp22+..+Dp62)Wp,
• где Dvi=(Vmi/VmBY)-(Vpi/VpBY) (этот член представляет собой погрешность от напряжения катушки),
• а Dpi=(Pmi-PmBY)-(Ppi-PpBY) (этот член представляет собой погрешность от фазы катушки).
Нижние индексы "i" обозначают номер катушки, который может принимать значения от 0 до 5 (потому имеется 6 катушек).
Индексы "m" обозначают "измеренное", а индексы "p" обозначают "спрогнозированное".
Параметры "W" представляют собой "весовые коэффициенты", которые используют для регулировки чувствительности к напряжениям или к фазам (например, Wv=1,0 и Wp=10-5).
Другими словами, первая часть погрешности представляет собой сумму квадратов разностей отношений измеренных напряжений на катушках к спрогнозированным. Это отношение для катушки i равно напряжению, полученному из катушки i, деленному на напряжение от катушки, измеряющей составляющую By, которой является катушка, расположенная под центральным проводом, чувствительная к вертикальной составляющей магнитного поля. Вторая часть погрешности представляет собой сумму квадратов разностей между измеренными относительными фазами и спрогнозированными относительными фазами. Термин "относительный" означает фазу от катушки, измеряющей составляющую By, что означает вычитание фазы составляющей By из фазы катушки i. Эти две части суммируют, и эта сумма представляет погрешность, используемую сборщиком.
Прогнозирование напряжений на катушках является работой "прогнозирования формы колебаний". В качестве входных данных прогнозирование формы колебаний берет места расположения проводов и катушек в пространстве. (Местоположение провода может изменяться по мере его подъема или опускания.) В ней также используют ориентации катушек и ориентации проводов. В ней также используют предположения о том, какие токи протекают по проводам, и предположения о фазах. Способ, используемый при программировании прогнозирования формы колебаний, представляет собой обычное применение электромагнитной теории (уравнений Максвелла), краткое описание которого частично приведено ниже.
Магнитная индукция (поле B) в любом месте наблюдений представляет собой сумму полей, созданных каждым фазным проводом.

 ,
,
где
 (Гн/м). В этих уравнениях
(Гн/м). В этих уравнениях  и
и  представляют собой координаты
представляют собой координаты  и
и  фазных проводов.
фазных проводов.
Уравнения 1a и 1b получены из магнитостатических соображений. Однако можно продемонстрировать, что для достаточно низких частот (в килогерцовом диапазоне) или для достаточно медленно изменяющихся переходных сигналов (подобных токам в линии электропередачи частотой 60 Гц) статические представления все еще являются справедливыми. Таким образом, для токов фазных проводов, изменяющихся во времени, как и в случае "Ошибка! Опорный источник не найден" (Error! Reference source not found), отклик магнитной индукции (поля B) в точке  имеет следующий вид:
имеет следующий вид:

 .
.
Датчики магнитного поля имеют отклики, которые в спектральной области являются пропорциональными частоте:

где  - эквивалентная площадь датчика. Во временной области эта зависимость выражается через производные следующим образом:
- эквивалентная площадь датчика. Во временной области эта зависимость выражается через производные следующим образом:
В результате, измеренные напряжения датчика во временной области могут быть выражены через токи в проводах следующим образом:

 .
.
Эти отношения и другие подобные методики запрограммированы в программу прогнозирования формы колебаний для использования в предпочтительном варианте осуществления настоящего изобретения.
Изобретение было испытано путем испытаний в реальных полевых условиях с неизменно превосходными результатами. На Фиг.9 и Фиг.10 показаны вычисленные параметры системы в сравнении с известными значениями для реальных фазных проводов при их работе для реальной воздушной системы передачи и распределения электроэнергии. Вычисленные значения, полученные в результате использования раскрытой и заявленной здесь технологии, соответствуют известным значениям с весьма приемлемой степенью точности.
В описании и на чертежах были раскрыты типичные варианты осуществления настоящего изобретения. Настоящее изобретение не ограничено этими вариантами его осуществления, которые приведены в качестве примеров. Конкретные термины были использованы только лишь в общем и в описательном значении, а не для ограничения. Объем патентных притязаний настоящего изобретения сформулирован в приведенной ниже формуле изобретения.
ПЕРЕЧЕНЬ ПУБЛИКАЦИЙ
1 Mamishev, A., Nevels, R., Russell, D., "Effects of Conductor Sag or Spatial Distribution of Power Line Magnetic Fields," IEEE Trans. on Power Delivery, V.11, No. 3, 7/96.
2 Bush, R., Black, W., et al, "Experimental Verification of a RT Program for the Determination of Temperature and Sag of OH Lines," IEEE Trans. Power App. & Systems, V. PAS102, No. 7., 7/83.
3 Seppa, T. 0., "Temperature-Sag Model for Operational Real Time Ratings," IEEE Trans. on Pwr. Delivery, V.10, No. 3,7/1995.
4 Chen, S., Black, W., "High Temp. Sag Model for OH Conductors," IEEE Trans. Pwr. Del., V.18, No. 1, 1/03.
5 Personal Communication, Whisonant, L., Duke Power, November 2004.
6 Personal Communication, Roach, A., Reliant Energy, April 1999.
7 Plonsey, R. and R.E.Collin, Principles and Applications of Electromagnetic Fields, McGraw-Hill, New York, 1961.
8 J.R. Wait and K.P.Spies, "On the Image Representation of the Quasi-Static Fields of a Line Current Source above the Ground", Canadian Journal of Physics, Vol.47, 1969, pp.2731-2733.
9 Robert G. Olsen, "Electromagnetic Fields from Power Lines," Washington State University, Pullman, WA 99164-2752, 1993, IEEE Power Conference Proceedings.
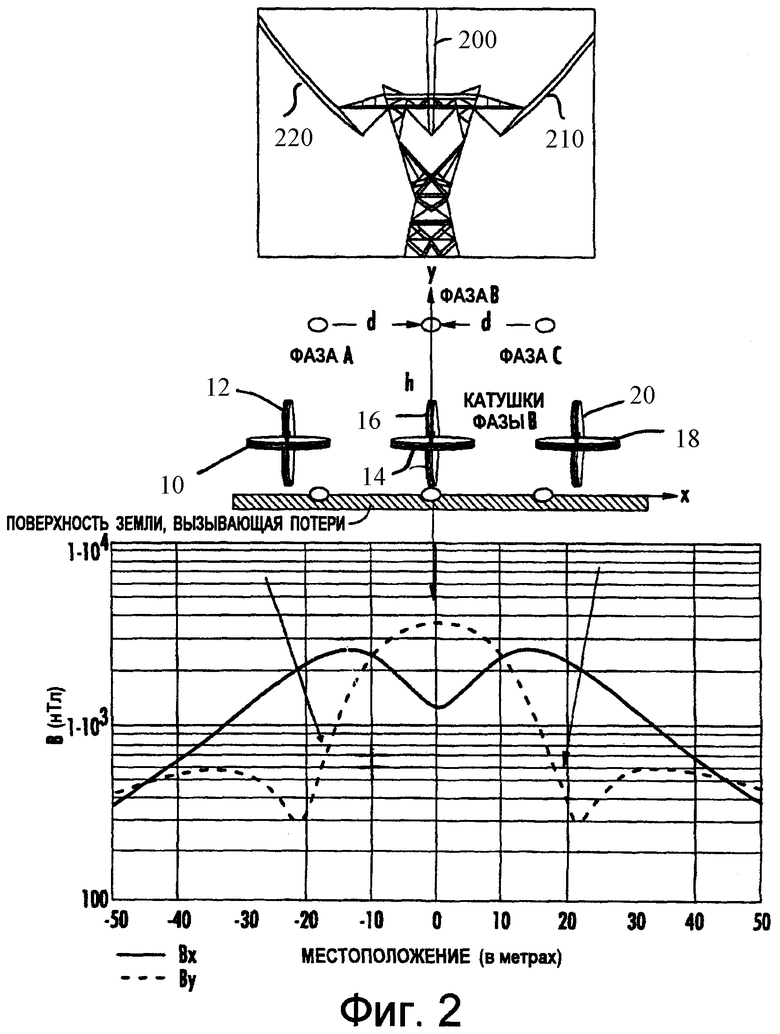
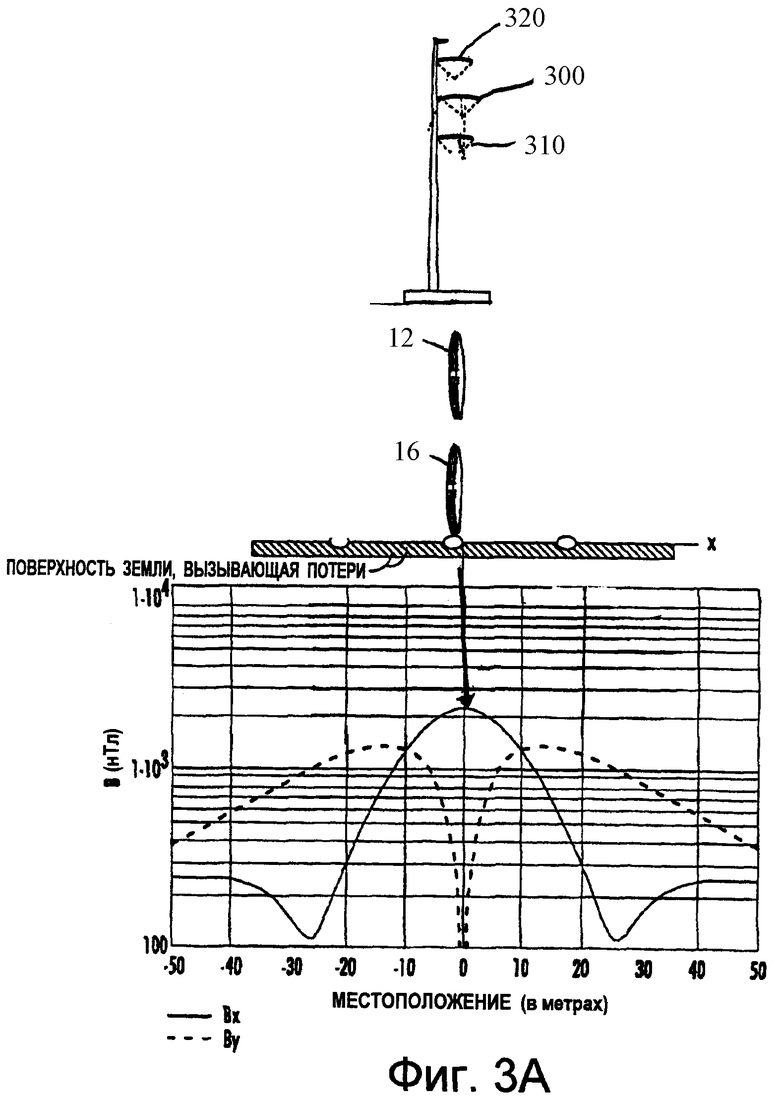
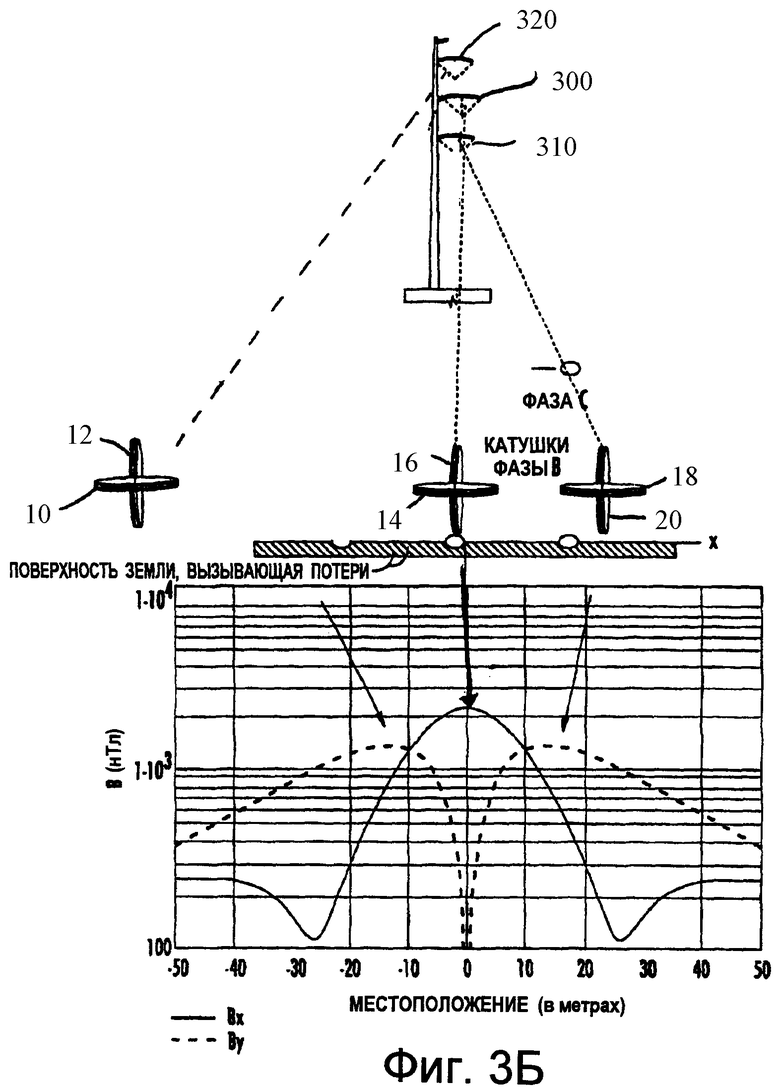

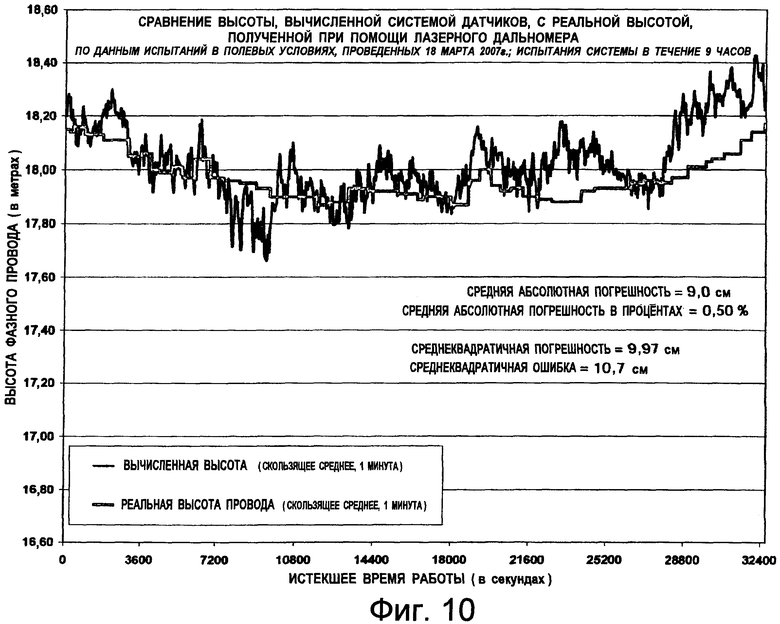
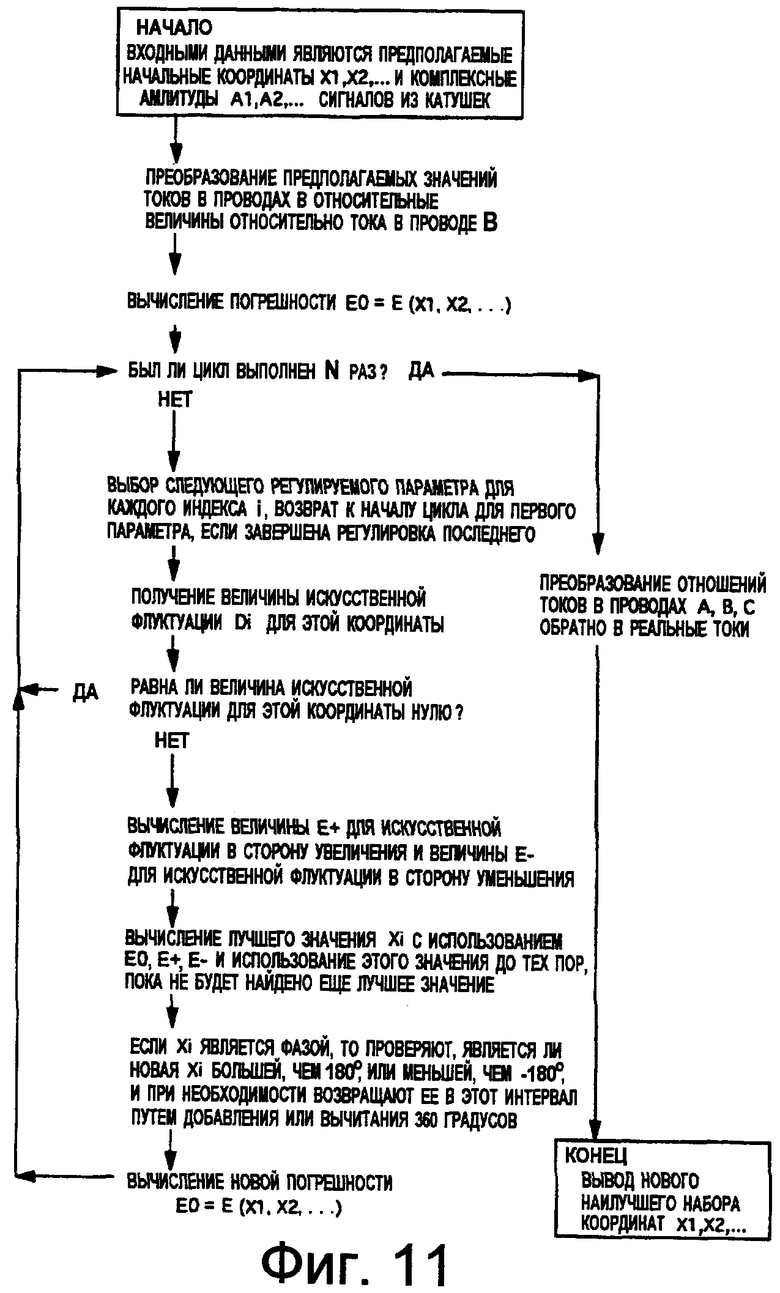
Изобретение относится к измерению магнитного поля, созданного фазными проводами в многофазных линиях электропередачи. Магнитные поля регистрируют катушками, расположенными достаточно близко к линиям для измерения напряжения, наведенного полем в катушках, без контакта с линиями. Составляющие х и y магнитных полей используют для вычисления провисания провода, а затем данные о провисании вместе с данными о напряженности поля могут быть использованы для вычисления токовой нагрузки на линию и фазы тока. Вычисления провисания из этого изобретения являются независимыми от измерений напряжения на линии и тока на линии. Технический результат заключается в повышении точности. 2 н. и 23 з.п. ф-лы, 11 ил.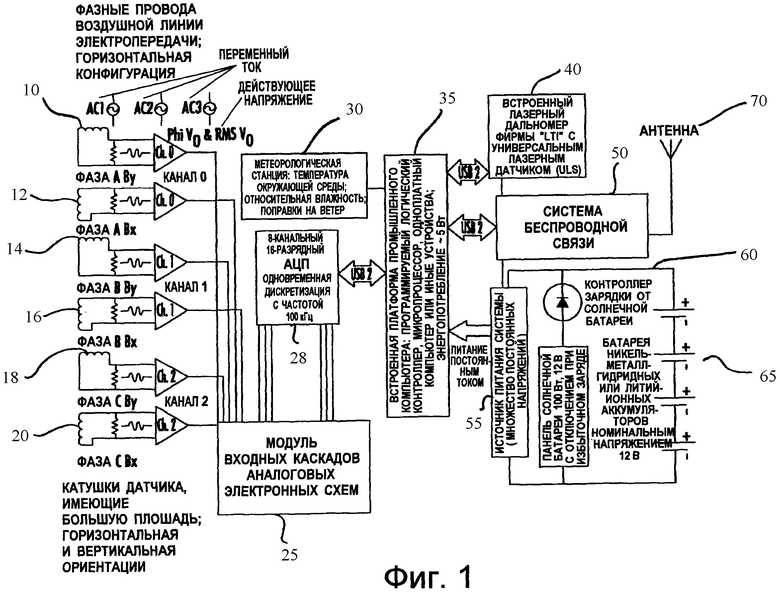
1. Компьютеризированная система для определения физического местоположения фазных проводов в дополнение к величине, фазе или частоте токов в фазных проводах, содержащая: устройство для измерения пространственной фазы и величины магнитного поля, создаваемого фазными проводами, причем упомянутое устройство содержит, по меньшей мере, одну пару ортогонально ориентированных датчиков магнитного поля, для размещения на расстоянии от фазного провода, причем упомянутые датчики содержат, по меньшей мере, пару коаксиальных проводящих обмоток, имеющих противоположную полярность, относительно общей центральной земли, а упомянутые обмотки противоположной полярности, по существу, взаимно компенсируют сигнал электрического поля в упомянутых обмотках и генерируют напряжение разомкнутой цепи между соответствующими концами каждой обмотки; многоканальный аналого-цифровой преобразователь для снятия наведенного напряжения разомкнутой цепи; модуль обработки данных, реализованный в компьютере, для обработки цифровых сигналов из аналого-цифрового преобразователя, причем упомянутые цифровые сигналы отображают выходные сигналы напряжения от упомянутых датчиков в реальном времени, а упомянутый модуль обработки данных содержит: по меньшей мере, один цифровой полосовой фильтр, предназначенный для отделения, по меньшей мере, основной частоты каждого сигнала напряжения; модуль определения фазы для распознавания фазы каждого упомянутого сигнала напряжения из каждого упомянутого датчика; модуль определения амплитуды для распознавания амплитуды каждого упомянутого сигнала напряжения из каждого из упомянутых датчиков.
2. Компьютеризированная система по п.1, в которой упомянутое напряжение разомкнутой цепи подают на дифференциальный вход фильтра нижних частот.
3. Компьютеризированная система по п.1, дополнительно содержащая фильтр нижних частот, соединенный с каждой из упомянутых, по меньшей мере, одной парой датчиков магнитного поля для фильтрации сигнала напряжения разомкнутой цепи, создаваемого каждым из упомянутых обмоток.
4. Компьютеризированная система по п.3, в которой упомянутым фильтром нижних частот является резистивно-емкостной (RC) фильтр нижних частот.
5. Компьютеризированная система по п.4, в которой упомянутый резистивно-емкостной (RC) фильтр нижних частот имеет частоту среза, равную 98 Гц.
6. Компьютеризированная система по п.1, дополнительно содержащая генератор колебаний, предназначенный для повышения точности аналого-цифрового преобразователя.
7. Компьютеризированная система по п.1, в которой упомянутое устройство расположено на расстоянии от фазных проводов, но в пределах измеряемого магнитного поля, создаваемого упомянутыми фазными проводами.
8. Компьютеризированная система по п.1, в которой упомянутый аналого-цифровой преобразователь снимает сигналы напряжения с частотой 8000 выборок в секунду в течение 4 секунд.
9. Компьютеризированная система по п.1, в которой выходным сигналом каждого упомянутого аналого-цифрового преобразователя является 16-разрядное число, отображающее напряжение.
10. Компьютеризированная система по п.1, в которой упомянутый модуль определения фазы и упомянутый модуль определения амплитуды используют окно Блэкмена.
11. Компьютеризированная система по п.1, в которой упомянутый модуль определения амплитуды обеспечивает вывод величины сигнала напряжения в вольтах действующего значения.
12. Компьютеризированная система по п.1, в которой упомянутое устройство для измерения магнитного поля содержит, по меньшей мере, три пары датчиков, обеспечивающих шесть сигналов напряжения.
13. Компьютеризированная система по п.1, в которой каждый датчик из пары расположен ортогонально к другому датчику из этой пары для регистрации только лишь составляющих Х и Y магнитных полей переменного тока, созданных фазным проводом.
14. Компьютеризированная система по п.1, в которой упомянутым аналого-цифровым преобразователем является восьмиканальный аналого-цифровой преобразователь, принимающий измерения напряжения из каждого датчика.
15. Компьютеризированная система по п.1, в которой упомянутая система запитывается с помощью солнечной батареи.
16. Устройство для измерения пространственной фазы и величины магнитного поля, создаваемого фазными проводами воздушной линии передачи и распределения, содержащее: по меньшей мере, один датчик магнитного поля для размещения на расстоянии от фазного провода, причем упомянутый датчик содержит, по меньшей мере, пару параллельных проводящих обмоток, имеющих противоположную полярность относительно общей земли, а упомянутые обмотки противоположной полярности, по существу, взаимно компенсируют сигнал электрического поля в упомянутых обмотках и генерируют напряжение разомкнутой цепи между незаземленными концами каждой обмотки.
17. Устройство по п.16, в котором упомянутые обмотки содержат охватываемую ими площадь, по меньшей мере, 150 квадратных метров.
18. Устройство по п.16, дополнительно содержащее, по существу, цилиндрическую катушку, в которой упомянутые обмотки по отдельности намотаны вокруг соответствующих поперечных утолщений упомянутой катушки, расположенных рядом друг с другом.
19. Устройство по п.18, в котором упомянутые обмотки выполнены из одинакового материала, имеют одинаковую длину и одинаковый радиус намотки.
20. Устройство по п.18, в котором упомянутая катушка содержит сердечник, выбранный из группы, состоящей из полого сердечника, сердечника, заполненного воздухом, ферритового сердечника, сердечника, выполненного из сплава никеля и железа, и сердечника из метгласса.
21. Устройство по п.16, содержащее, по меньшей мере, три пары упомянутых датчиков магнитного поля для размещения под воздушной линией электропередачи, при этом каждая пара датчиков размещена под одним фазным проводом трехфазной системы передачи.
22. Устройство по п.16, в котором упомянутый датчик расположен достаточно близко к упомянутому фазному проводу, вследствие чего упомянутое напряжение разомкнутой цепи между обмотками составляет, по меньшей мере, 100 милливольт переменного тока.
23. Устройство по п.22, в котором упомянутое напряжение разомкнутой цепи находится между приблизительно 100 милливольт и приблизительно 400 милливольт переменного тока.
24. Устройство по п.16, содержащее, по меньшей мере, одну пару упомянутых датчиков магнитного поля, причем упомянутая пара датчиков расположена ортогонально, не пересекаясь друг с другом, для регистрации только лишь составляющих Х и Y магнитных полей переменного тока, созданных фазным проводом.
25. Устройство по п.16, в котором упомянутое переменное напряжение разомкнутой цепи отображает составляющие Х и Y магнитных полей переменного тока, созданных, по меньшей мере, одной трехфазной схемой распределения, по меньшей мере, в трех отдельных местоположениях на земле.
| US 2005073295 07.04.2005 | |||
| US 2002047709 25.04.2002 | |||
| US 6545211 08.04.2003 | |||
| DE 10242158 18.03.2004. |

