Область техники
Настоящее изобретение относится к электрическому приводу для бесщеточного двигателя с постоянными магнитами и к способу управления приводом.
В качестве неограничительного примера в данном описании описан привод, содержащий трехфазный бесщеточный двигатель, с постоянными магнитами, который генерирует синусоидальную противоэлектродвижущую силу (c.e.m.f., противо-эдс), для привода электрических вентиляторов с аксиальными, радиальными и других типов крыльчатками.
Предшествующий уровень техники
Учитывая, что область применения таких электрических вентиляторов представляет собой систему управления климатом и системы охлаждения, которые устанавливают в транспортных средствах с электродвигателем, следует понимать, что основные цели разработки электрических вентиляторов с этим назначением представляют собой: снижение акустического шума, ограничение потребления энергии и понижение стоимости.
Эти требования привели к использованию бесщеточных двигателей с синусоидальной c.e.m.f. (бесщеточные двигатели переменного тока), приводимых в действие посредством инвертора, выполненного с возможностью генерирования токов синусоидальной формы, которые делают ненужным использование двигателей с трапецеидальной формой колебаний c.e.m.f. с шестиступенчатой PWM (ШИМ, широтная импульсная модуляция) (более известных как бесщеточные двигатели постоянного тока).
Синусоидальная форма колебаний c.e.m.f. и тока соответствующей фазы сводят к минимуму активные пульсации крутящего момента (практически равны нулю), что, таким образом, уменьшает механические вибрации и акустические шумы.
Также известно, что возможно свести к минимуму потребление тока для генерирования определенной величины крутящего момента привода, обеспечивая, таким образом, максимальную эффективность электромеханического преобразования, благодаря оптимальному приведению в действие бесщеточных двигателей переменного тока, которые обычно приводятся в действие управляемыми током инверторами напряжения.
Для получения такого типа привода бесконтактные коммутаторы должны изменять состояние таким образом, чтобы полярная ось магнитного поля ротора оставалась под углом 90 электрических градусов по отношению к полярной оси магнитного поля, генерируемого током, проходящим в обмотках статора, независимо от прикладываемого крутящего момента и скорости вращения.
Для получения информации об угловом положении ротора обычно используют относительно дорогостоящие устройства, включающие в себя абсолютные датчики положения или датчики на эффекте Холла, которые выполнены интегрально со статором и установлены под соответствующим углом для детектирования синусоидальной формы колебаний магнитного поля возбуждения вдоль внешней кромки ротора.
Выходные сигналы, генерируемые датчиками, затем соответствующим образом декодируют для управления бесконтактными коммутаторами таким образом, чтобы поддерживать угловой сдвиг в 90 электрических градусов между магнитными полями статора и ротора.
Такой тип привода требует использования упомянутых выше датчиков положения с относительно высокой стоимостью.
С целью уменьшения стоимости приводов были разработаны технологии управления, в которых не используются датчики такого типа.
Такие технологии управления основаны на учете того, что, если привод является оптимальным, c.e.m.f. и фазный ток находятся в фазе, и наоборот, в каждой точке в рабочей области (крутящий момент, скорость вращения, постоянное напряжение питания).
Следовательно, такие стратегии управления и приводы, которые стали известны как "бессенсорные", основаны на считывании электрических показателей (например, напряжения на выводах двигателя или тока, протекающего в обмотках двигателя), для детектирования точек, где c.e.m.f. и ток пересекают ноль (прохождение через ноль), в них вычисляют относительную фазу между c.e.m.f. и током, и реализуют соответствующие способы управления бесконтактными коммутаторами инвертора, которые обеспечивают поддержание этих двух параметров в фазе.
Один из недостатков этих способов состоит в том, что для детектирования пересечения нуля c.e.m.f, то есть для считывания знака c.e.m.f., ток, протекающий через обмотку, должен оставаться равным нулю достаточно длительное время, для обеспечения возможности считывания, что входит в противоречие с требуемой синусоидальной формой тока.
Чтобы отклонения от идеальной формы имели незначительный эффект, продолжительность интервала времени, в течение которого ток остается равным нулю, должна быть уменьшена до минимума, и для устранения искажений, индуцированных управляемым прерыванием фазного тока, которое, однако, является коротким, и рисков несчитывания требуемого сигнала вводят сложные алгоритмы для вычисления углового положения ротора в режиме реального времени: на практике, эти алгоритмы представляют собой интегральную часть ориентированного на поле управления (FOC (ОПУ), на жаргоне специалистов) и требуют использования сложных и дорогостоящих контроллеров с высокой производительностью обработки (известных как контроллеры DSP (ЦСП, цифровой сигнальный процессор на жаргоне специалистов).
Краткое изложение существа изобретения
В этом контексте основное назначение настоящего изобретения состоит в создании электрического привода, который не содержал бы упомянутых выше недостатков.
Задача настоящего изобретения состоит в создании малошумного, имеющего низкое потребление энергии привода.
Другая задача изобретения состоит в создании электрического привода на основе простой и недорогостоящей архитектуры управления.
Указанное техническое назначение и указанные задачи, по существу, достигаются с помощью электрического привода с характеристиками, описанными в пункте 1 формулы изобретения и в одном или более из зависимых пунктов. Изобретение также относится к способу управления приводом.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает принципиальную схему привода с электрическим бесщеточным двигателем в соответствии с изобретением;
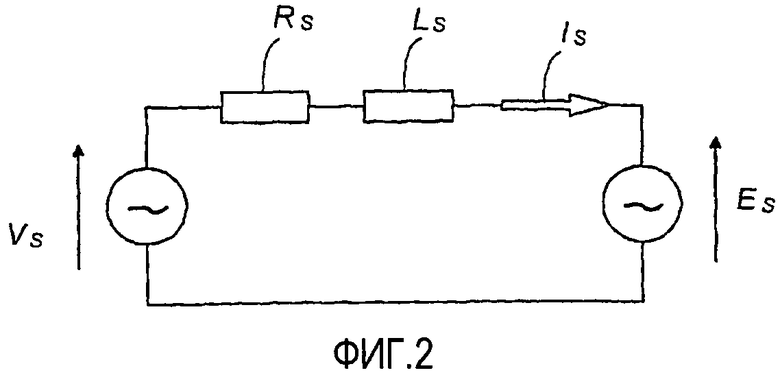
фиг. 2 - схему замещения фазы бесщеточного двигателя переменного тока;
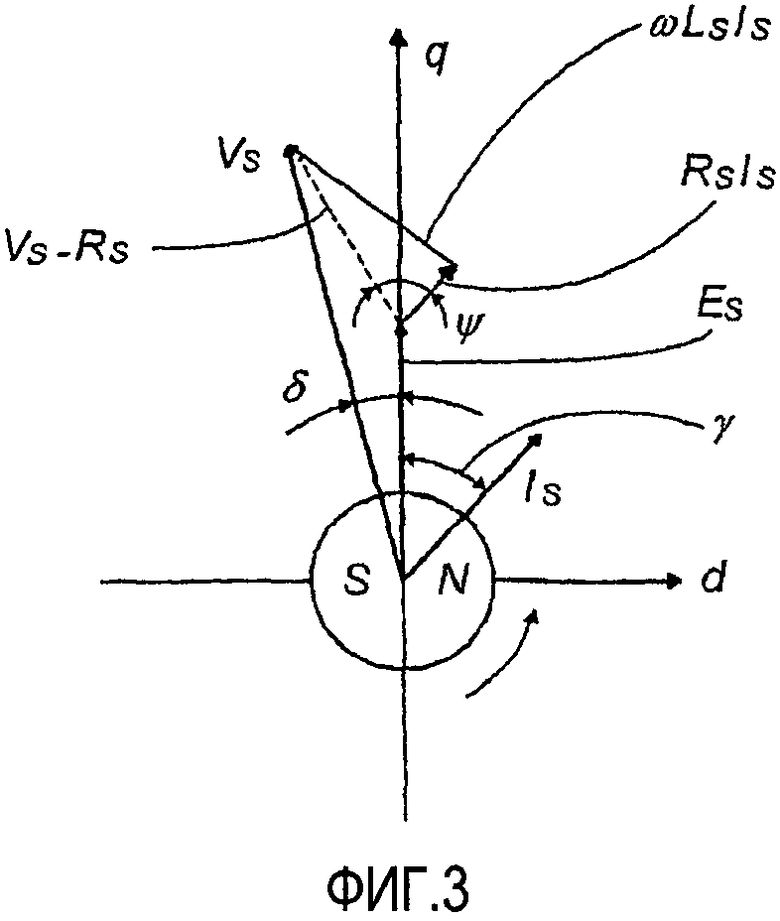
фиг. 3 - векторную диаграмму для схемы, показанной на фиг. 2;
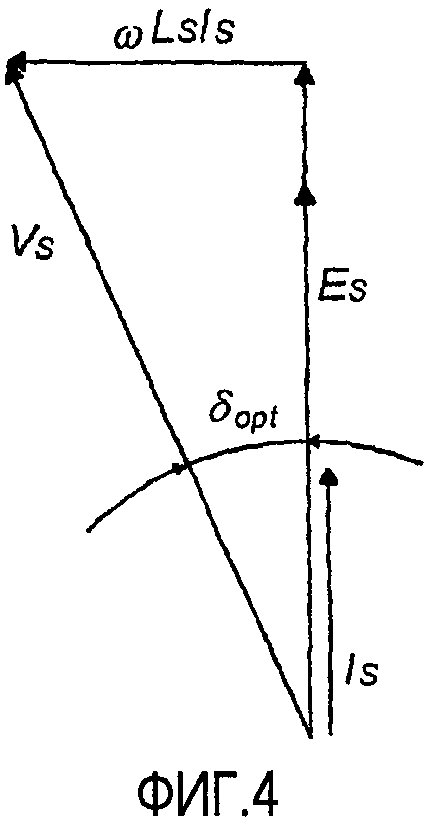
фиг. 4 - векторную диаграмму, представляющую оптимальную работу схемы по фиг. 2;
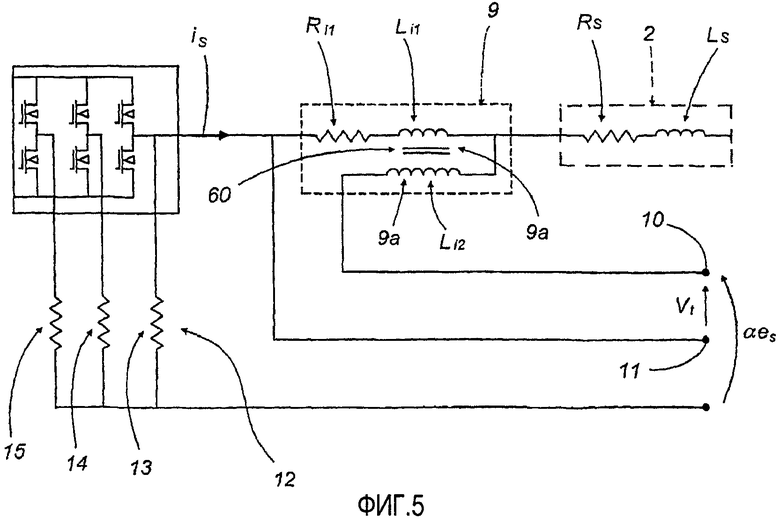
фиг. 5 - схему, представляющую пример участка привода в соответствии с изобретением;
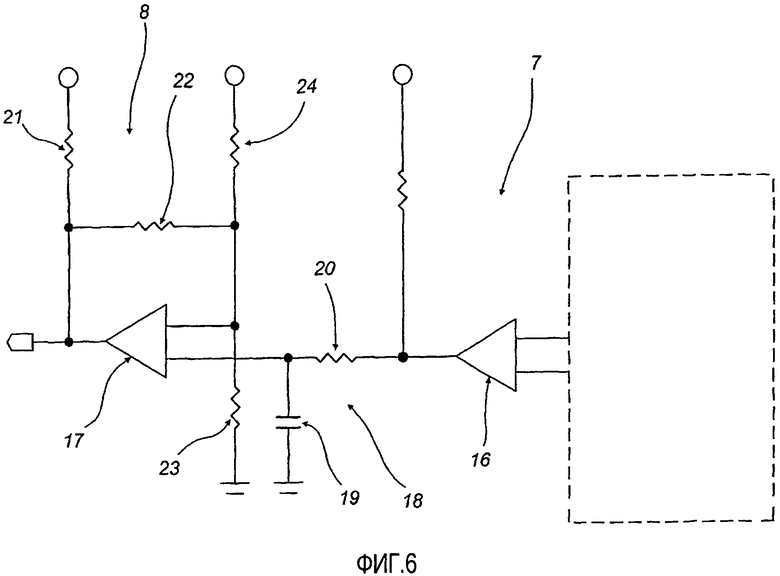
фиг. 6 - принципиальную схему первой детали привода, показанного на фиг. 1;
фиг. 7 - принципиальную схему второй детали привода, показанного на фиг. 1;
фиг. 8 - диаграмму управления приводом по фиг. 1, пока не будут достигнуты оптимальные рабочие условия;
фиг. 9 - схему, представляющую напряжения, приложенные к бесщеточному двигателю;
фиг. 10 - схему по фиг. 9 в конкретных рабочих условиях.
Подробное описание предпочтительных вариантов воплощения изобретения
Данное изобретение основано на принципе получения информации, непрерывной по времени, из которой выводят значения напряжения питания для оптимизации управления двигателем, привод которого осуществляется от электрического привода 1 (фиг. 1).
Привод 1 содержит электродвигатель 2, например предназначенный для приведения в движение вентилятора (не показан).
Как будет более понятно из следующего описания, назначение привода 1 состоит в получении информации, относящейся к положению ротора двигателя 2, путем детектирования пересечения нуля противоэлектродвижущей силой (также в сокращенной форме называется c.e.m.f.) простым и экономическим образом.
В качестве примера, без ограничения объема изобретения, данное описание относится к бесщеточному двигателю 2 с постоянным магнитом, с изотропным, двухполюсным ротором и трехфазной статорной обмоткой.
Обмотка статора содержит три обмотки идентичной формы и количеством витков, с пространственным сдвигом фазы на 120° и соединенные по схеме звезда, центр которой не доступен.
На фиг. 2 показана модель схемы двигателя 2.
Каждая из трех обмоток характеризуется фазным сопротивлением RS и синхронной индуктивностью LS.
Напряжение VS прикладывают к двигателю 2, в то время как вектор ES представляет индуцированную c.e.m.f. в каждой из трех обмоток статора.
C.e.m.f. имеет синусоидальную форму колебаний и возникает при вращении ротора, состоящего из постоянного магнита; IS представляет собой фазный ток, также синусоидальный, который протекает через каждую из трех обмоток.
На фиг. 3 показана векторная диаграмма электрических величин VS, IS, ES, упомянутых выше.
Продольная ось d ориентирована в направлении потока Φr ротора, и поперечная ось q расположена под углом 90° относительно продольной оси d.
В соответствии с законом индукции (e=dΦ/dt) индуцированная c.e.m.f. ES в обмотке статора всегда направлена вдоль поперечной оси q, то есть расположена со сдвигом фазы 90° относительно потока Φr ротора.
Напряжение VS, подаваемое приводом 1 в обмотки статора для заданных условий работы, представлено, как упомянуто выше, вектором VS.
Вектор IS тока статора составляет угол Ψ с разностью векторов VS-ES. Угол Ψ зависит от характеристических параметров двигателя и от частоты питания в соответствии с соотношением:
Ψ=arctan (ωLS/RS).
Электромагнитная энергия, получаемая в двигателе, задается как 3ESIScos(γ), где γ представляет собой угол между ES и IS.
Мощность, поглощаемая двигателем 2, по существу, составляет сумму получаемой электромагнитной мощности и мощности потерь из-за эффекта Джоуля в резисторах трех фаз.
Следовательно, при некотором получаемом электромагнитном поле, поглощаемая мощность будет наименьшей, когда угол γ равен нулю, то есть когда c.e.m.f. ES и ток IS находятся в фазе, как показано на фиг. 4.
Как показано на фиг. 1, привод 1 содержит трехфазный мост 3 или инвертор для подачи питания в двигатель 2.
Предпочтительно, привод 1 содержит низкоиндуктивный шунт 3а, подключенный к трем выводам инвертора 3, по которому протекают токи, проходящие в инверторе, как более подробно описано ниже.
Привод 1 также содержит каскад 4 постоянного тока, предназначенный для питания моста 3, и также содержит выравнивающий конденсатор 5 (Cbus) и фильтрующую катушку 5a индуктивности (Lbus).
В качестве примера, трехфазный мост 3 генерирует, используя синус-дельта PWM модуляцию, по существу, известного типа, трех напряжений, сдвинутых по фазе на 120° друг от друга с переменной частотой "freg".
Предпочтительно, амплитуда основных напряжений питания может быть запрограммирована как линейная функция от частоты f, так и независимо от последней.
Следует отметить, что, как хорошо известно, бесщеточный двигатель 2 с постоянным магнитом развивает крутящий момент только при его синхронной скорости, и поэтому он будет вращаться точно со скоростью, прямо пропорциональной частоте f приложенных напряжений, в соответствии с известным соотношением RPM=120xfreq/p, где p представляет собой количество полюсов ротора с постоянным магнитом.
Привод 1 содержит схему 6, предназначенную для детектирования противоэлектродвижущей силы и, более конкретно, пересечения нуля c.e.m.f. ES, ниже также называемую схемой 6 детектирования пересечения нуля c.e.m.f.
Схема 6 детектирования содержит первый каскад, показанный на фиг. 5, и второй каскад, представленный на фиг. 6. Второй каскад обрабатывает выходной сигнал, получаемый из первого каскада.
В представленном предпочтительном варианте воплощения, как станет понятно из дальнейшего описания, информацию о положении ротора получают путем детектирования пересечения нуля c.e.m.f., генерируемой только одной из трех фаз двигателя.
В альтернативных вариантах выполнения, например в более сложных вариантах применения, в которых требуются более высокие мгновенные скорости отклика, сигнал положения ротора детектируют для всех фаз путем повторения схемы, описанной выше, для каждой фазы.
Учитывая, для удобства описания, величины фаз двигателя 2, включенного по схеме звезда (также известно, что двигатель, включенный по схеме треугольника, функционально не отличим от его эквивалента, включенного по схеме звезда), величину c.e.m.f. можно задать с помощью уравнения:
Для получения значения es необходимо знать, как значение vS напряжения VS, приложенного к фазе двигателя 2, так и резистивно-индуктивное падение напряжения, из-за тока, протекающего в обмотках двигателя 2.
Как описано ниже, привод 1 в соответствии с изобретением выполнен с возможностью определения резистивно-индуктивного падения и напряжения, прикладываемого к фазе двигателя 2.
Для определения резистивно-индуктивного падения напряжения привод 1 содержит, как показано на фиг. 5, индуктивно-резистивный элемент 9, последовательно включенный с одной из трех фаз двигателя 2, как описано ниже.
Элемент 9 содержит первую индуктивную катушку Li1 и вторую индуктивную катушку Li2 с коэффициентом взаимной индуктивной связи, очень близким к 1.
Две индуктивных катушки Li1 и Li2 соединены так, что они формируют автотрансформатор 9a и, предпочтительно, намотаны вокруг магнитного сердечника 30 (фиг. 5).
В качестве примера, магнитный сердечник выполнен в форме двойного E и изготовлен либо из высокочастотного феррита, или из плоской стали для магнитных пластин.
Первая индуктивная катушка Li1 последовательно соединена с одной из фазовых обмоток двигателя 2 и составляет первичную обмотку автотрансформатора 9a.
Предпочтительно, индуктивная катушка Li1 имеет малое количество N1 витков большого диаметра, для сведения к минимуму потерь мощности из-за эффекта Джоуля.
Ri1 представляет сопротивление обмотки первой индуктивной катушки Li1.
Вторая индуктивная катушка Li2, которая составляет вторичную обмотку автотрансформатора, имеет количество N2 витков, которое намного больше, чем количество N1 витков индуктивной катушки Li1, и по ней не протекает ток IS, и поэтому обеспечивает напряжение Vt2, которое зависит от производной тока IS, протекающего по первичной обмотке.
Как показано на фиг. 5, если:
Vt = напряжение на выводах 10, 11, то есть на выводах индуктивно-резистивного элемента 9;
VR = падение напряжения на резисторе Ri1;
Vti = падение напряжения на первой индуктивной катушке Li1;
Vt2 = падение напряжения на второй индуктивной катушке Li2;
M = взаимная индуктивность между Li1 и Li2,
тогда:
Важно отметить, что выражение для Vt формально идентично выражению для резистивно-индуктивного падения напряжения в обмотках двигателя 2 из-за протекающего тока.
Поэтому можно написать следующее уравнение:

где  представляет собой коэффициент ослабления.
представляет собой коэффициент ослабления.
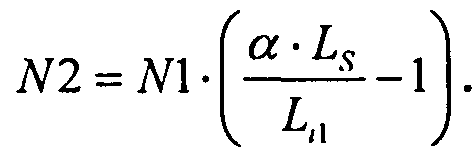
Следовательно, синхронная индуктивность LS двигателя 2, собственная индуктивность первичной обмотки Li1 и относительное количество витков N1 можно использовать для определения количества витков N2 вторичной обмотки Li2, которое удовлетворяет следующему уравнению:
Таким образом, благодаря резистивно-индуктивному элементу 9 с установленными выше параметрами, уменьшенное значение резистивно-индуктивного падения напряжения на фазе двигателя 2 может быть получено с использованием на практике измерительной схемы, соответствующей схеме замещения фазы двигателя 2.
Следует отметить, что коэффициент α ослабления обозначает влияние схемы 6 детектирования c.e.m.f. на общие потери привода 1, то есть чем меньше коэффициент, тем ниже потери.
Информацию о напряжении VS, прикладываемом к двигателю 2, получают, используя схему 12 для измерения приложенного напряжения.
Схема 12 измерений содержит три резистора 13, 14, 15, соединенных по схеме звезда, показанной, в частности, на фиг. 5.
В результате ослабления на коэффициент α, как вклада приложенного эквивалентного напряжения VS, измеряемого, как более подробно описано ниже, с помощью набора резисторов 13, 14, 15, соединенных по схеме звезда, так и вклада резистивно-индуктивного падения напряжения, из-за взаимно связанных индуктивностей Li1 и Li2, схема подает ослабленный сигнал c.e.m.f., с амплитудой, определенной следующим образом:

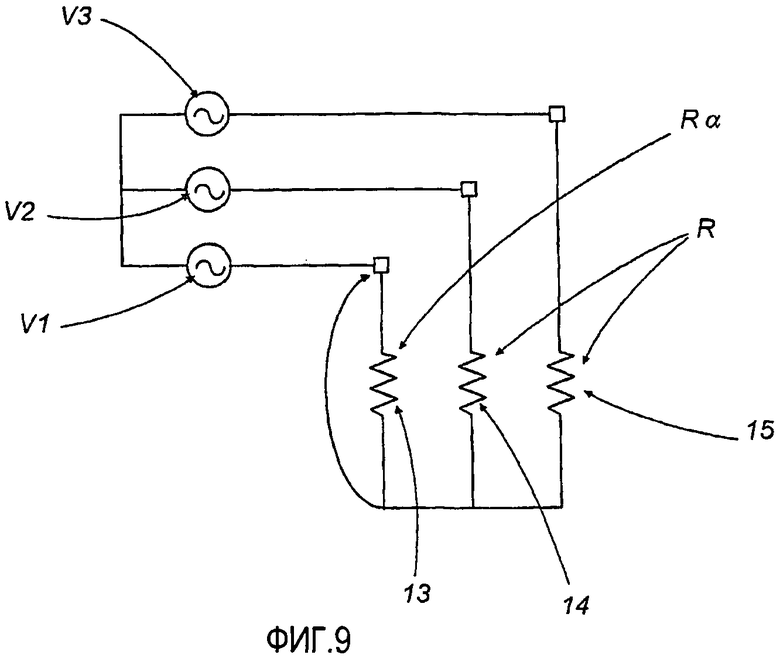
На основе коэффициента α ослабления, определенного выше, резисторы 13, 14, 15, соединенные по схеме звезда, используемые для измерения подаваемого напряжения VS, соответствующим образом не сбалансированы.
На фиг. 9 показаны реальные напряжения V1, V2, V3 первой гармоники, генерируемые инвертором 3, и прикладываемые к двигателю 2, каждое схематично представлено с соответствующим идеальным генератором напряжения.
Как показано, напряжение αV1 должно появляться на выводах резистора 13, также обозначенного как Rα.
Предпочтительно, значения резисторов 13, 14, 15 могут быть вычислены в заданный момент времени, с учетом симметричной трехфазной тройки напряжений, которая осуществляет питание двигателя 2.
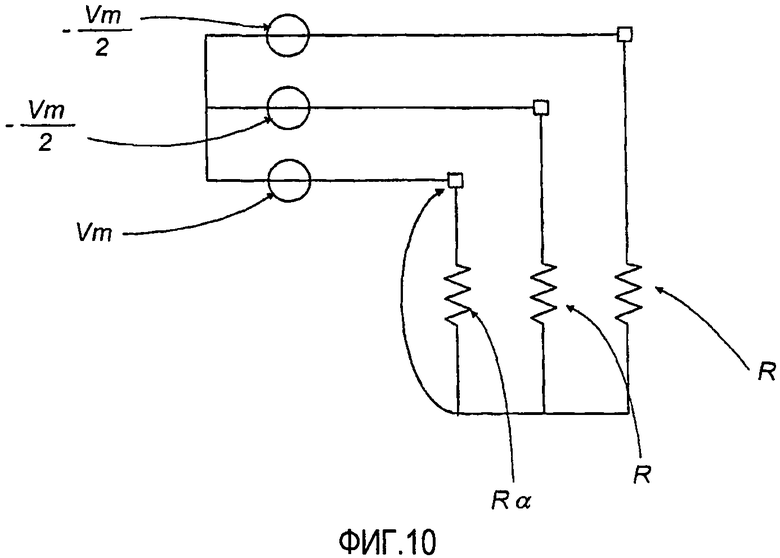
Например, в момент времени, где V1 достигает своего максимального значения Vm, значения V2 и V3 составляют Vm/2.
Схема, которая должна быть проанализирована, поэтому представляет собой схему, показанную на фиг. 10.
Применяя принцип эффекта наложения для вычисления падения напряжения на Rα в схеме, показанной на фиг. 10, получим:
из чего можно вывести соотношение между Rα и R для предварительно зафиксированного значения α:
где R представляет собой общее значение сопротивления для резисторов 14 и 15.
Прикладывая сигнал αeS к схеме формирования сигнала, показанной на фиг. 6, получают сигнал для пересечения нуля противоэлектродвижущей силы, который может быть обработан микроконтроллером 26.
Следует отметить, что получаемое поведение, по существу, является тем же, что и поведение, получаемое с помощью датчика Холла с цифровым выходом.
Как показано, в частности, на фиг. 6, такая схема содержит два каскада компараторов, соединенных каскадно: первый каскад 7, с соответствующим компаратором 16, не проявляет какой-либо гистерезис, и на его выходе можно детектировать ложное переключение.
При низкой скорости вращения, схема на фиг. 5 для детектирования пересечения нуля c.e.m.f. дает значения напряжения порядка нескольких сотен милливольт, и благодаря низкому коэффициенту α ослабления отношение сигнал-шум будет низким и создает упомянутое выше ложное переключение на выходе первого каскада 7 схемы по фиг. 6.
Второй каскад 8 содержит второй гистерезисный компаратор 17, имеющий входной RC фильтр 18 для ограничения колебаний сигнала, которые могут ошибочно привести к срабатыванию компаратора 17.
RC фильтр 18 содержит конденсатор 19 и резистор 20 и представляет, по существу, фильтр известного типа.
Второй каскад 8 также содержит резистивную схему для фиксации порога переключения и соответствующего гистерезиса.
В иллюстрируемом варианте выполнения резистивная схема содержит четыре резистора 21, 22, 23, 24, соответствующим образом соединенные друг с другом.
Таким образом, здесь отсутствует ложное переключение на выходе каскада гистерезисного компаратора, с очевидными преимуществами в отношении эффективности обработки микроконтроллера 26.
Для обеспечения максимальной эффективности двигателя 2 ток, протекающий в обмотках статора, должен находиться в фазе с соответствующей c.e.m.f.
Как показано на векторной схеме на фиг. 4, возможно получить приблизительное выражение оптимального угла δopt опережения для приложенного напряжения VS относительно c.e.m.f. ES.
Если резистивным падением напряжения в фазе можно пренебречь (чем выше кпд двигателя 2, тем в большей степени можно пренебречь падением), предполагая, значение KE, как постоянную c.e.m.f., измеренную при V/rpm (V/(обороты в минуту)), и p представляет собой количество полюсов, тогда:

Кроме того, если оптимальное значение угла δopt меньше, чем 20 электрических градусов, тангенс угла может быть аппроксимирован с самим углом и, следовательно:
где синхронная индуктивность LS предпочтительно выражена в Генри.
Другими словами, если резистивным падением RSIS напряжения можно пренебречь относительно ES и тангенс угла δopt опережения может быть аппроксимирован самим углом, тогда на практике угол δopt опережения линейно зависит только от фазного тока IS.
Поскольку привод 1 в соответствии с изобретением содержит чрезвычайно простой и экономичный микроконтроллер 26, например 8-битный микроконтроллер, упомянутая выше линейная взаимозависимость между δopt и потребляемым током IS может быть сохранена в нем, например, в форме таблицы, что делает возможным подавать в микроконтроллер 26 сигнал, пропорциональный току IS, и микроконтроллер 26 получает возможность управления мостом 3 в соответствии с соответствующим значением δopt.
С этой целью привод 1 содержит схему 25 для косвенного детектирования амплитуды фазного тока.
Более конкретно, схема 25 содержит детектор огибающей или каскад 27 детектора, который обрабатывает сигнал напряжения, присутствующий на выходах шунта 3a, прямо пропорциональный току, протекающему через сам шунт 3а.
Как известно из техники, максимальное значение пиков напряжения на шунте 3 пропорционально пику фазного тока двигателя 2.
Поскольку фазный ток является синусоидальным, данные от детектора 27 огибающей будут равны действующему значению IS фазного тока, умноженному на  .
.
Детектор 27 огибающей отслеживает эту информацию, и микроконтроллер 26 выполняет выборку при намного более низкой частоте, чем PWM несущей: достоверность информации гарантируется тем фактом, что скорость изменения выходного сигнала детектора 27 огибающей, которая прямо связана со скоростью изменения механической нагрузки, очень низка.
Следует отметить, что постоянную разряда детектора 27 соответствующим образом выбирают для правильного следования огибающей пиков тока через шунт 3a.
В принципе, микроконтроллер 26, путем выборки выходного сигнала каскада 27 детектора огибающей, через аналого-цифровой преобразователь, косвенно измеряет значение тока для фазного тока и, в результате, определяет соответствующий оптимальный угол, который должен быть приложен, для поддержания тока в фазе с c.e.m.f.
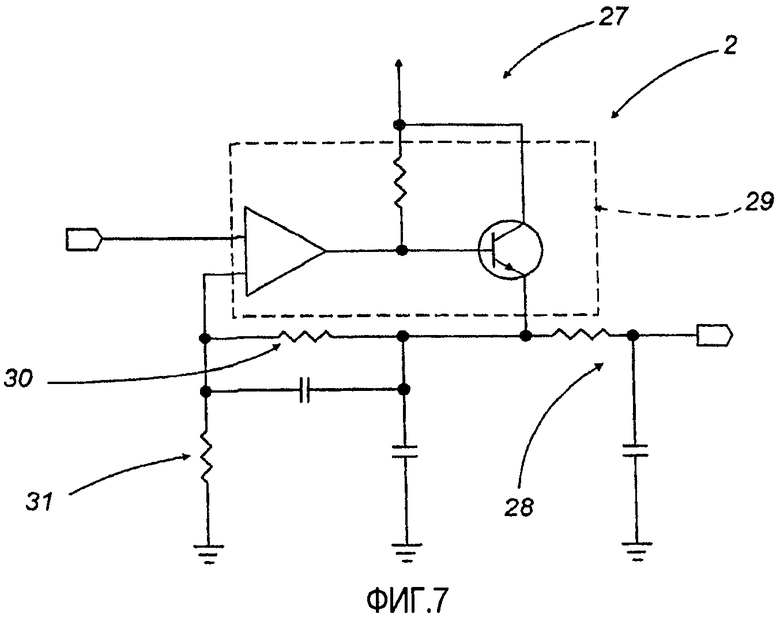
На фиг. 7 показана схема варианта выполнения детектора 27 огибающей тока шунта.
Детектор 27 содержит RC фильтр 28, предназначенный для фильтрации огибающей тока шунта.
Детектор 27 также содержит схему 29, для заряда конденсатора таким образом, чтобы, когда неинвертированный сигнал ниже, чем инвертированный сигнал, конденсатор мог бы разряжаться через резисторы 30 и 31.
Резисторы 30 и 31 соответствующим образом соединены для обеспечения следования устройством по пикам тока шунта.
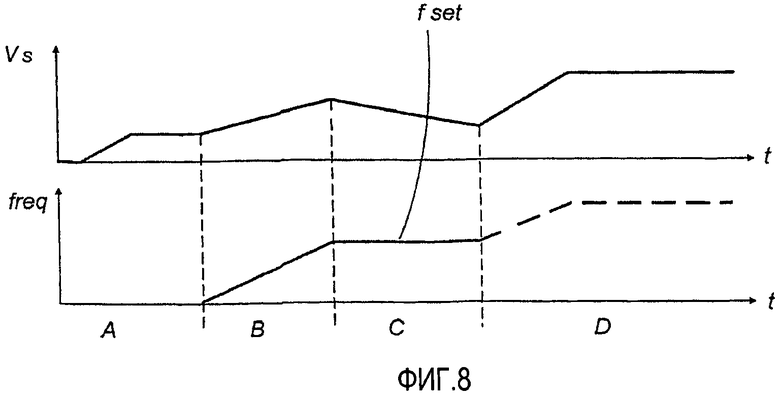
На фиг. 8 иллюстрируется процедура для управления бесщеточным двигателем 2, содержащая следующие этапы:
A) этап остановки или совмещения;
B) этап ускорения в соответствии с заданным наклоном V/f;
C) этап "получения" сигнала пересечения нуля c.e.m.f., где "получение" означает достижение оптимальных рабочих условий;
D) этап оптимизированного приведения в действие.
На этапах A и B инвертор 3 обеспечивает питание двигателя 2 исключительно в режиме с "разомкнутым контуром", то есть без использования какого-либо из двух доступных сигналов обратной связи, а именно пересечения нуля c.e.m.f. и огибающей тока шунта.
На этапе C используется только сигнал пересечения нуля c.e.m.f.
Наконец, на этапе D используются оба сигнала пересечения нуля c.e.m.f. и огибающей тока шунта, и инвертор 3 приводит в действие двигатель 2 в оптимальных условиях работы, то есть когда c.e.m.f. и фазный ток находятся в фазе друг с другом.
На этапе А три постоянных напряжения прикладывают к двигателю, соответствующим образом, определенные для обеспечения протекания тока таким образом, чтобы обеспечить вращение ротора до тех пор, пока он не переместится в известное положение, где поле статора и поле ротора совмещаются.
Этот этап обеспечивает то, что максимальный возможный крутящий момент, в условиях управления с "разомкнутым контуром", может быть образован на следующем этапе B.
На этапе B двигатель 2 запитан тремя синусоидальными напряжениями, со сдвигом фазы 120° друг от друга так, чтобы сформировать вращающее поле статора с повышающейся частотой, амплитуда которого пропорциональна самой частоте.
Во время этого этапа амплитуда среднего напряжения, прикладываемого к двигателю 2, изменяется пропорционально его частоте "freq", как показано на фиг. 8.
Частота "freq" начинается от нуля и увеличивается до тех пор, пока она не достигает значения "fset", показанного на фиг. 8, которое установлено в программных средствах микроконтроллера 26.
Значение "fset" больше, чем минимальная электрическая частота, при которой сигнал пересечения нуля c.e.m.f. может быть надежно детектирован таким образом, что на следующих этапах C и D можно измерять соотношение фаз между противоэлектродвижущей силой ES и приложенным напряжением VS.
Такое соотношение представляет собой угол δ между величинам ES и VS, показанными на фиг. 3 и 4.
Крутизна этого наклона ускорения представляет собой параметр привода и должна быть модифицирована в соответствии с инерцией двигателя 2 + системы нагрузки.
Бесщеточный двигатель 2, в котором действует вращающееся поле статора, генерируемое приводом, ускоряется до тех пор, пока оно точно не достигнет синхронной скорости, обозначенной как "fset".
На этапе B бесщеточным двигателем 2 управляют точно так же, как и асинхронным двигателем, но, в отличие от последнего, он достигает конца наклона скорости, поскольку во время самого наклона угол между полем ротора и полем статора никогда не превышает 90 градусов, представляя условие, необходимое и достаточное для генерирования крутящего момента привода для бесщеточного двигателя с постоянным магнитом, который, как известно, представляет собой "синхронный" двигатель.
Значение крутизны наклона V/f выбирают таким образом, чтобы гарантировать подачу в двигатель достаточного тока и, следовательно, крутящего момента для его ускорения за заданное время до скорости, соответствующей частоте "fset", например, как функции параметров окружающей среды, таких как напряжение питания инвертора 3 и окружающая температура.
Достижение частоты "fset" инициирует этап C, во время которого частота остается постоянной на значении "fset", и приложенное напряжение VS уменьшается с заданной скоростью.
Как отмечено выше, на этапе C сигнал пересечения нуля c.e.m.f. доступен, и фазу между VS и ES поэтому измеряют с помощью микроконтроллера 26.
Постепенное уменьшение VS уменьшает потребление тока IS до тех пор, пока он не достигнет минимального требуемого значения, для поддержания вращения двигателя: когда это состояние достигается, VS и ES находятся, по существу, в фазе, микроконтроллер 26 детектирует состояние в фазе между VS и ES, и рассматривает этап C законченным.
После этапа C следует этап D.
На этапе D устанавливают только амплитуду VS и не устанавливают частоту "freq".
Микроконтроллер 26 постоянно детектирует электрическую частоту, получая интервал времени между двумя последовательными фронтами сигнала, гомологическими или негомологическими, для выходного сигнала из схемы 6 детектирования пересечения нуля c.e.m.f., которому соответствует частота основного выходного напряжения инвертора 3.
Для получения оптимальной работы двигателя 2 также воплощают итеративную процедуру, содержащую этапы, описанные ниже.
Пиковое значение фазного тока измеряют с помощью микроконтроллера 26 с помощью детектора 27 огибающей тока шунта.
Микроконтроллер 26 детектирует пересечение нуля c.e.m.f. с помощью соответствующей схемы 6 детектирования.
Микроконтроллер 26 затем прикладывает опережение δopt между VS и ES, поскольку программное средство, установленное в микроконтроллере 26, содержит соотношение между углом опережения между VS и ES и пиковым значением фазного тока, соответствующим оптимальной работе.
В этот момент процедура снова начинается от измерения пикового значения фазного тока.
Упомянутая выше процедура оптимизации обеспечивает работу бесщеточного двигателя 2 с c.e.m.f., находящейся в фазе с соответствующим фазным током.
В такой ситуации, как отмечено выше, потребляемая мощность минимизируется; путем соответствующей установки интервала времени оптимизированной процедуры становится возможным сделать систему в достаточной степени реакционно-способной на внезапные изменения нагрузки, например, из-за временного засорения в трубопроводах подачи и/или всасывания потока воздушно-гидравлического контура и с последующим устранением самой причины засорения.
Описанный способ управления также позволяет обеспечить максимальный кпд привода двигателя, обеспечивая то, что ток в каждой обмотке статора будет находиться в фазе с соответствующей c.e.m.f.
Таким образом, двигатель генерирует максимально возможный крутящий момент. То есть бесщеточный двигатель приводится в действие эффективным образом, поскольку ток статора не имеет составляющих по оси d, а только по оси q.
Привод работает таким образом, что после того как начальный переход будет закончен, потребление энергии двигателем сводится к минимуму во всех условиях нагрузки и на всех скоростях вращения, как показано на векторной схеме, фазный ток находится в фазе с соответствующей c.e.m.f.
Изобретение относится к области электротехники и может быть использовано в электрическом приводе для бесщеточного двигателя с постоянными магнитами и способу его управления. Техническим результатом является создание малошумного, имеющего низкое потребление энергии привода. Электрический привод (1) содержит: бесщеточный двигатель (2) с постоянным магнитом, мост (3) источника питания двигателя (2), схему для управления мостом (3) источника питания в соответствии с положением ротора и фазными токами (IS); при этом привод (1) содержит схему (6) для детектирования пересечений нуля индуцированной в обмотках статора противоэлектродвижущей силой (ES), для определения положения ротора, и схему (25) для косвенного детектирования амплитуд фазных токов (IS). 4 з.п. ф-лы, 10 ил.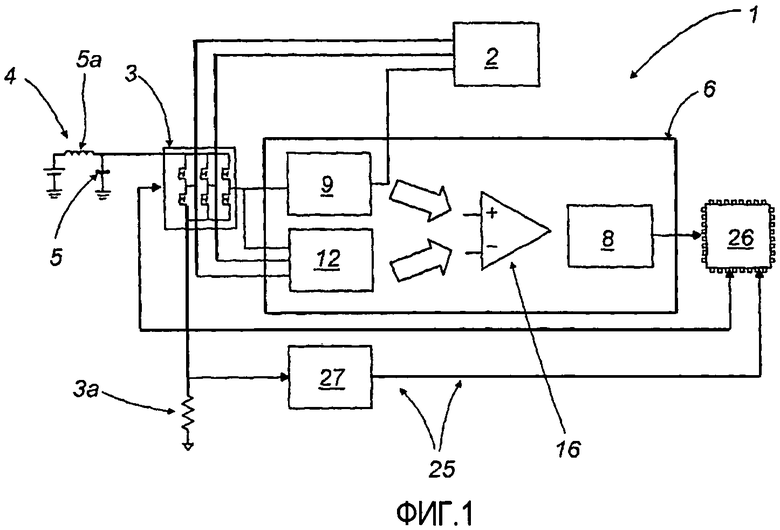
1. Электрический привод, содержащий
бесщеточный двигатель (2) и мост (3) источника питания двигателя (2), причем каждая фазная обмотка двигателя имеет резистивность (Rs) и одновременно индуктивность (Ls),
отличающийся тем, что содержит
первую схему (6) детектирования пересечения нуля противоэлектродвижущей силой (Es), индуцированной в обмотках статора, в результате вращения ротора,
вторую схему (27) детектирования для детектирования пиковых фазных токов в обмотках двигателя,
третью схему для управления мостом (3) источника питания,
при этом первая схема (6) содержит индуктивно-резистивный элемент (9), который является аналоговым представлением электрического импеданса фазовой обмотки и последовательно соединен с соответствующей фазовой обмоткой двигателя (2) и имеет уменьшенные значения в соответствии с коэффициентом (α) затухания резистивного и индуктивного импеданса фазовой обмотки двигателя (2), причем первая схема (6) содержит также цепь (12), состоящую из трех, соединенных звездой первого, второго и третьего резисторов (13, 14, 15), имеющих значение
Rα=Rα/(3-2α); R и R, где α - указанный коэффициент затухания, R представляет собой общее значение сопротивления для резисторов, указанная цепь предназначена для измерения напряжения, подаваемого на указанную фазовую обмотку, при этом выходной сигнал первой схемы (6) представляет собой сигнал затухания противоэлектродвижущей силы

при этом третья схема содержит контроллер (26), связанный с первой схемой (6), и обеспечивает пересечение нуля противоэлектродвижущей силой, и совместно с второй схемой (27) обеспечивает пиковый фазовый ток, протекающий по обмоткам двигателя, причем третья схема обеспечивает приложение угла опережения (δ) между напряжением, подаваемым двигателем (Vs), и индуцируемой противоэлектродвижущей силой (Es), указанный угол опережения (δ) представляет собой заданную линейную функцию пикового значения фазового тока (Is) согласно выражению
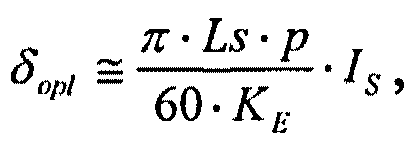
где Ls - синхронная индуктивность двигателя (2), измеренная в Генри; р - число полюсов двигателя; КЕ - постоянная противоэлектродвижущей силы, измеренная в V/rpm.
2. Привод по п.1, отличающийся тем, что индуктивно-резистивный элемент (9) содержит первую и вторую взаимосвязанные катушки (Li1, Li2) индуктивности, имеющие взаимную индуктивность «М», при этом указанный коэффициент (α) ослабления вычисляется как отношение сопротивления (Ri1) первой катушки (Li1) индуктивности к сопротивлению (Rs) фазы двигателя (2) и как отношение значения общей индуктивности «Lil+М» к синхронной индуктивности «Ls» двигателя, то есть:

3. Привод по п.2, отличающийся тем, что первая и вторая катушки (Li1, Li2) индуктивности взаимно соединены с образованием автотрансформатора (9а), причем первая и вторая катушки (Li1, Li2) индуктивности намотаны вокруг магнитного сердечника (30).
4. Привод по любому из пп.2 или 3, отличающийся тем, что вторая катушка (Li2) индуктивности имеет количество (N2) витков большее, чем количество (N1) витков первой катушки (Li1) индуктивности.
5. Привод по любому из пп.2 или 3, отличающийся тем, что количество (N2) витков второй катушки (Li2) индуктивности представляет собой произведение количества (N1) витков первой катушки (Li1) индуктивности на разность между отношением синхронной индуктивности (Ls) двигателя (2), умноженной на коэффициент (α) ослабления (затухания) к значению (L) индуктивности первой катушки (Li1) индуктивности и единицей, то есть:
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279757C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2000 |
|
RU2207700C2 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| US 7034478 B2, 25.04.2006 | |||
| US 5539354 A, 23.07.1996 | |||
| US 2006261767 A1, 23.11.2006 | |||
| JP 2006115678 A, 27.04.2006. | |||

