Настоящее изобретение относится к сигнализационному устройству и соответствующему способу управления для автоматических механизмов, особенно для приведения в движение закрывающихся элементов, таких как ворота, раздвижные перегородки, двери и т.п. Далее приводится ссылка на первый из них.
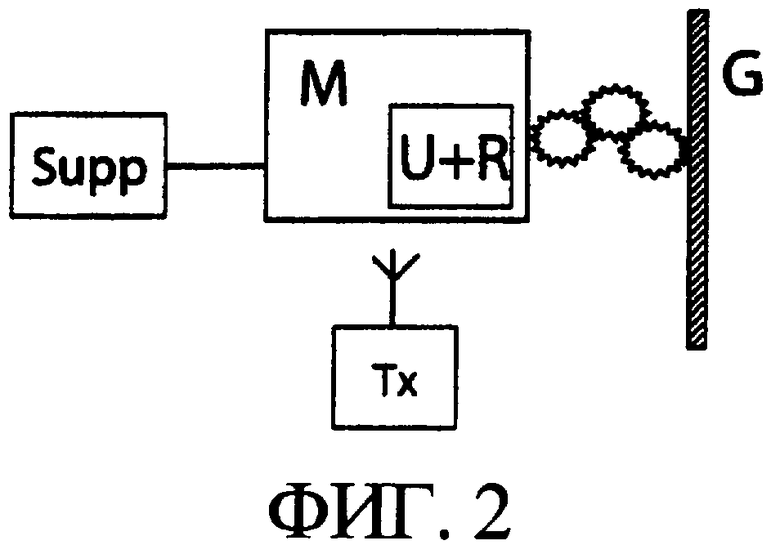
Автоматические установки для ворот, в общем, состоят (фиг. 1 и 2) из редукторного электромотора M для приведения в движение ворот G, управляющего блока U для регулировки редукторного мотора M и централизованного управления всей установкой, приводного командного устройства C (цифровая клавиатура и/или пульт дистанционного управления и/или клавишный селекторный переключатель) и последовательности защитных устройств S (фотоэлементы, чувствительные края, световые сигнализаторы). Конкретные компоненты в любом случае могут отсутствовать или присутствовать в количестве более одного. Например, в автоматических установках для тентов защитные устройства S отсутствуют, а управляющий блок U интегрирован в редукторный двигатель M с радиоприемным устройством R (фиг. 2). Цилиндрические моторы, используемые в них, имеют меньший размер (в самых компактных версиях внутренний диаметр может составлять только 24 миллиметра), и по этой причине наиболее широко распространенной системой (дистанционного) управления является радиоприемное устройство R, на которое осуществляется передача с пульта дистанционного управления Tx. Фактически, в редукторном моторе M нет пространства для кабельных соединений.
Обычно, в двух описанных вариантах блок U питается от сети коммунального электроснабжения Supp.
Управляющий блок U, вследствие множества имеющихся переменных, не изготавливается в одной универсальной версии для всех установок одного семейства. Он должен иметь на входе и/или выходе ряд соединений (кабельных или беспроводных) для конкретной установки, чтобы надлежащим образом подключать все функциональные блоки. Следовательно, по меньшей мере, один управляющий блок U должен соответствовать каждому типу установки, с вытекающим увеличением номенклатуры продуктов и усложнением складского управления.
В установках по фиг. 1 вдоль активированных защитных устройств S, управляющих закрывающими элементами G, размещены устройства (световые и/или акустические устройства) L, которые сигнализируют о режиме перемещения (остановлен или в движении) закрывающего элемента G. Эти устройства L соединяются только с управляющими блоками U, оснащенными надлежащим (и зачастую выделенным) соединительным или интерфейсным средством, которое по своей сути является сложным, и практически невозможно добавить их в системы по фиг. 2 вследствие недостатка пространства внутри редукторного мотора M, который не допускает каких-либо дополнительных соединений.
Технической задачей настоящего изобретения является создание для способа установки светового и/или акустического сигнализационного устройства (DDS) описанной выше установки, так чтобы оно поддерживало соединение с любым управляющим блоком U независимо от предварительной компоновки в нем соединительного средства, зарезервированного для сигнализационного устройства.
Другой задачей настоящего изобретения является создание DDS для осуществления способа, т.е. такого, которое поддерживает соединение с любым управляющим блоком U независимо от предварительной компоновки в нем соединительного средства, зарезервированного для DDS.
Поставленная задача решена путем создания способа управления DDS, вставленного в автоматический механизм ворот, раздвижных перегородок, дверей и т.п. и имеющего световое и/или акустическое оповестительное устройство, характеризующегося тем, что
подают мощность через DDS, по меньшей мере, в один редукторный мотор (или эквивалентную механическую группу, имеющую мотор);
определяют в DDS мощность, потребляемую, по меньшей мере, одним редукторным мотором;
активируют оповестительное устройство, когда заранее определенный порог потребленной мощности превышен.
Чтобы осуществить способ, используют DDS, имеющее световое и/или акустическое оповестительное устройство, характеризующееся тем, что оно содержит
средство подачи мощности, по меньшей мере, в один редукторный мотор (или эквивалентную механическую группу, имеющую мотор);
средство определения мощности, потребленной посредством, по меньшей мере, одного редукторного мотора из средства подачи мощности;
средство управления для активации оповестительного устройства, когда заранее определенный порог потребления мощности превышен, причем превышение обнаружено посредством средства обнаружения.
Согласно изобретению, следующие соображения применимы и к способу, и к DDS, и для краткости ссылка приводится только на последнее.
DDS согласно изобретению может быть использовано с любым управляющим блоком U, редукторным двигателем M или командным устройством C, поскольку оно не требует специальных соединений, а только стандартных или стандартизированных соединений или разъемов. Достаточно разместить его последовательно между источником электроэнергии Supp (например, коммунальной сетью, аккумулятором, трансформатором, панелью солнечных батарей и т.д.) и, по меньшей мере, одним редукторным мотором M (или эквивалентным механическим приводным устройством). Ниже DDS могут быть подключены другие компоненты автоматического механизма, такие как блок U или другие периферийные устройства S и/или C. Если DDS подключено к коммунальной сети, оно может выгодно содержать собственную схему подачи мощности, которая устанавливает сетевое напряжение с надлежащим значением для электрических/электронных компонентов. Либо DDS может питаться электроэнергией автономно, например, от аккумуляторов или солнечных батарей. Естественно, изменение питающего напряжения может требовать изменения/замены/добавления электрических компонентов в любом известном случае.
Более того, конструкция DDS обеспечивает то, что оно просто в использовании и применимо к уже существующим автоматическим механизмам, в которых не предполагается специального соединения для DDS.
Помимо этого, управляющие блоки U могут изготовляться без предоставления DDS-соединения, тем самым обеспечивая снижение стоимости. Это преимущество является очень важным, в частности, для устройств с небольшим доступным пространством, как в системах на фиг. 2, в которых редукторные моторы M вставляются в трубку контейнера, и в которых создание специального выхода для DDS становится практически невозможным вследствие небольшого размера.
Преимущественно, DDS могут быть изготовлены таким образом, чтобы быть чувствительными к потребляемой мощности посредством измерения потребляемого тока, вместо интегрирования устройства измерения мощности (например, схемы ваттметра).
Чтобы определять потребляемую мощность/ток, DDS может быть снабжено средством измерения тока, потребляемого устройствами, размещенными ниже DDS, т.е. редукторного мотора M и/или управляющего блока U. Фактически, когда редукторный мотор не работает, потребляемый ток имеет небольшое значение, но когда редукторный мотор актирован, потребляемый ток возрастает, и оповестительное устройство сигнализирует об этом состоянии. Минимальный порог очень полезен в любом случае, обеспечивая подачу энергии в радиоприемное устройство R, которое всегда должно работать для приема команд от передающего устройства Tx.
Независимо от того, измеряется ли потребляемая мощность или ток, возможные управляющие пороги управления могут быть введены в DDS (пороги мощности и/или пороги тока), с которыми сравнивается потребляемая мощность. Оповестительное устройство в DDS активируется только при превышении определенного порога (т.е. DDS активирует оповестительное устройство, если сигнал потребляемой мощности или тока превышает один из заранее заданных порогов, в противном случае оно деактивирует его).
В случае DDS со световым оповестительным устройством (DDS+L) активированная фаза оповестительного устройства может соответствовать миганию.
Преимущественно, DDS предоставляет возможность использования микропроцессора (или аналогового средства обработки), посредством которого можно задавать персонализированные и/или программированные варианты применения DDS. Например, для DDS+L функция "освещения, включающегося по требованию" может быть активирована (или не активирована), т.е. активация светового оповестительного устройства (например, лампы) с постоянным освещением, так что оно выступает в качестве осветительного прибора в процессе движения мотора, и/или удержание его активированным с устанавливаемой задержкой даже после прерывания перемещения ворот, когда обнаружено, что потребленная мощность или ток упал ниже порога. Либо частота миганий может варьироваться, чтобы выдавать сообщения о необходимости обслуживания или сигнальные/предупредительные сообщения.
DDS может быть подключено к средству формирования переменного напряжения, и из показаний напряжения можно получить параметр, в отношении которого может быть задано управление оповестительным устройством и/или самим DDS, либо пороговое значение мощности или тока.
Преимущественно, посредством микропроцессора DDS можно подсчитывать число маневров (т.е. активаций), приводимых в действие посредством автоматического механизма (например, число открываний) для реализации системы оповещений о диагностике и техническом обслуживании (более быстрое или медленное изменение частоты миганий). Помимо этого можно контролировать/отслеживать потребление мощности ниже DDS в любой момент времени, чтобы оценивать случаи анормального функционирования и, следовательно, выдавать аварийное оповещение с помощью оповестительного устройства. Следовательно, DDS согласно изобретению может предоставлять эффективную систему аварийной защиты.
Разумеется, DDS одновременно может быть оснащено несколькими световыми оповестительными устройствами, а также одним или более акустическим оповестительным устройством или аналогичным устройством, чтобы тем самым выдавать различные типы сигналов.
Преимущества устройства согласно изобретению в любом случае должны стать более очевидными из последующего описания предпочтительного варианта осуществления со ссылкой на прилагаемые чертежи, из которых:
фиг. 1 иллюстрирует известную автоматическую установку;
фиг. 2 иллюстрирует известную автоматическую установку;
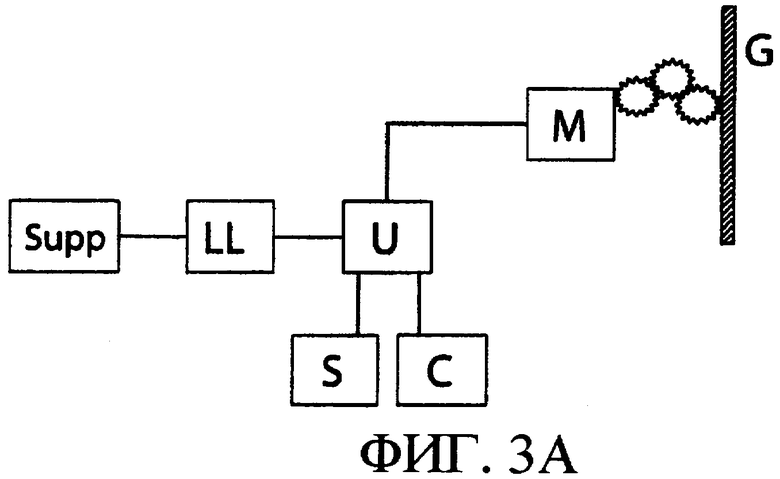
фиг. 3A иллюстрирует автоматическую установку с DDS, согласно изобретению;
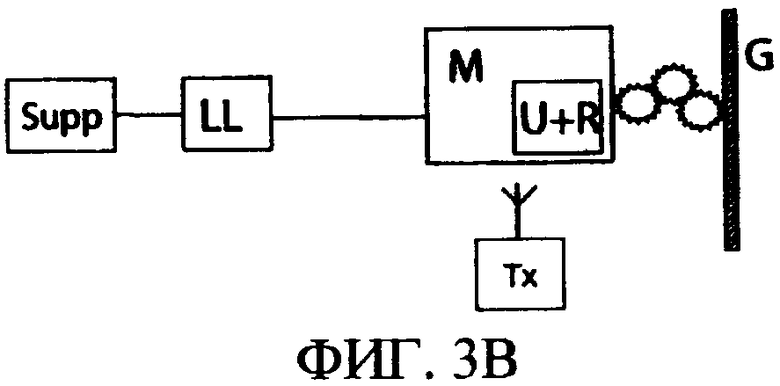
фиг. 3B иллюстрирует автоматическую установку с DDS, согласно изобретению;
фиг. 4 иллюстрирует принципиальную схему DDS, согласно изобретению;
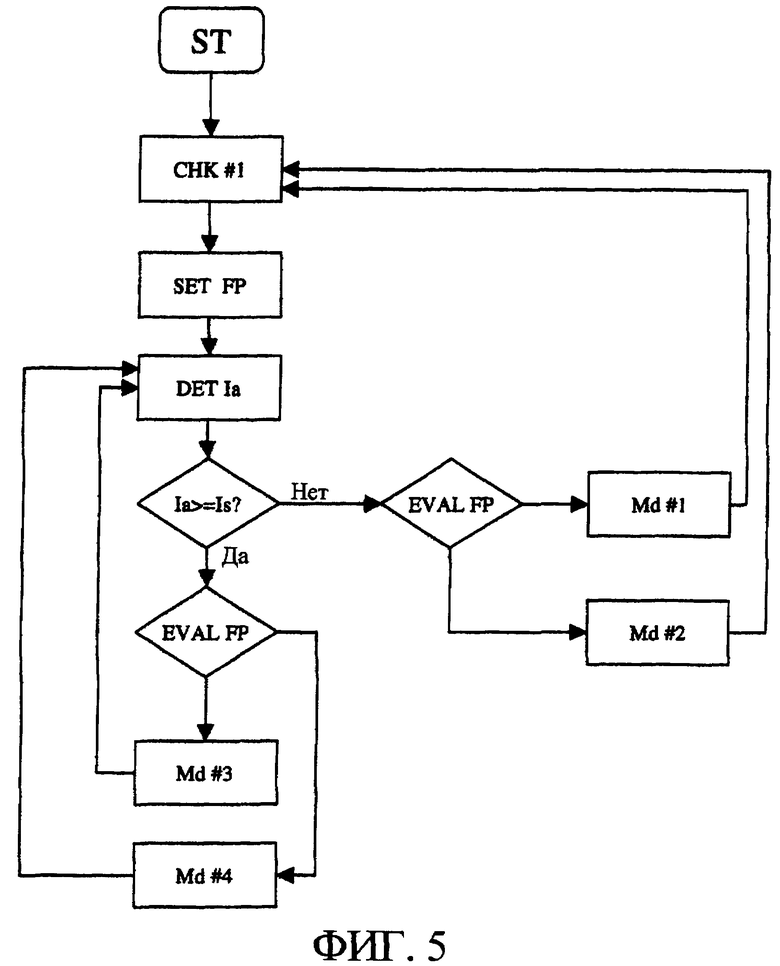
фиг. 5 иллюстрирует функциональную блок-схему для DDS, согласно изобретению.
На фиг. 3A, 3B компоненты автоматической установки с DDS проиллюстрированы согласно изобретению, с помощью LL (мигающий сигнал). Другие компоненты соответствуют компонентам, уже описанным на фиг. 1 и 2.
DDS LL размещается между линией подачи мощности, от которой оно получает свою мощность, и управляющего блока U, который подает мощность на редукторный мотор M (или аналогичное устройство). Таким образом, электропитание редукторного мотора M осуществляется посредством DDS LL, как и для остальных компонентов автоматического механизма.
С учетом типа соединения DDS LL относительно всей установки, оно не требует специальных разъемов, а только стандартных или стандартизированных соединений либо разъемов, самое большее, пары разъемов.
DDS LL может питаться от сети Supp либо от внутренних или внешних источников (аккумуляторов, панелей солнечных батарей, источников питания и т.д.).
На фиг. 4 показана принципиальная схема DDS LL согласно изобретению. Акустическое сигнализационное устройство содержит двухполюсный входной интерфейс T-IN, где один разъем t1 подключен к кабелю фазы коммунальной сети, а разъем t2 подключен к нейтральному кабелю, и соответствующий выходной интерфейс T-OUT.
Интерфейс T-OUT подключен (или приспособлен для того, чтобы быть подключенным) к компонентам ниже DDS LL. Например, интерфейсы T-IN и T-OUT могут содержать просто выходной щиток и т.п., и соединения с компонентами могут осуществляться с помощью проволочных выводов.
Следующие элементы подключены параллельно между фазой и нейтралью: световое оповестительное устройство (такое как лампа) L с последовательным электронным выключателем Sw (например, Triac) и стабилизированной схемой подачи мощности (либо эквивалентным средством) CPS для подачи электропитания (см. опорный уровень +В) к компонентам DDS LL.
Схема CPS может содержать однополупериодный выпрямитель, выпрямляющий стабилитрон и емкостное полное сопротивление сброса.
Между фазой и нейтралью предусмотрена схема RR (или эквивалентное средство) для обнаружения тока, потребляемого в интерфейсе T-OUT, содержащем, например, параллель из балластного резистора и двух ограничительных встречно-параллельных диодов.
К плюсовому напряжению подключено обрабатывающее и управляющее средство EM (здесь микроконтроллер или микропроцессор), которое:
- считывает выходное напряжение из курсора потенциометра PT (питаемого от плюсового напряжения) посредством линии A/D1 (к которой подключен аналогово-цифровой преобразователь);
- принимает сигнал от схемы RR посредством линии A/D2 (к которой подключен аналогово-цифровой преобразователь);
- управляет переключателем Sw лампы L;
- активирует звуковой сигнализатор BZ.
DDS LL функционирует следующим образом (фиг. 5).
Начальный этап = блок STart
При начальной подаче напряжения в интерфейс T-IN выключатель Sw размыкается, и лампа L отключается (деактивируется). Схема CPS формирует плюсовое напряжение и подает мощность в обрабатывающее средство EM.
Этап начального управления = блок CHecK 1
Обрабатывающее средство EM считывает показания линии A/D1 и регистрирует напряжение, присутствующее в ней. Согласно этому значению, например, посредством сравнения с заранее заданными значениями, они задают на следующем этапе задания (блок SET FunctionParameter) режим FP функционирования лампы L и/или DDS LL. Этот режим FP позволяет лампе L функционировать путем освещения, включающегося по требованию, или мигающим светом.
Этап обнаружения тока = DETect Ia
Посредством схемы RR и линии A/D2 (т.е. показаний напряжения на разъемах схемы RR) средство EM определяет потребляемый ток Ia в разъеме T-OUT того, что подключено ниже разъема, т.е. автоматического механизма (фиг. 3A, 3B).
Затем (см. этап принятия решений "Ia>=Is?") средство EM сравнивает ток Ia с пороговым значением Is тока.
Если ток Ia превышает Is, средство EM оценивает режим FP функционирования (блок EVALuate FP). Согласно FP блок-схема программы в средстве EM может достигать двух различных функциональных блоков (Md 3 или Md 4), где, например, Md 3 определяет мигание лампы L (или активацию общего оповестительного устройства с фиксированной или заранее установленной частотой), а Md 4 определяет ее постоянное горение (или непрерывную активацию общего оповестительного устройства). Затем система возвращается к этапу определения тока (DETect Ia).
Если ток Ia меньше Is, средство EM оценивает режим FP функционирования (блок EVALuate FP). Согласно FP блок-схема программы в средстве EM может достигать двух различных функциональных блоков (Md 1 или Md 2), где, например, Md 1 задает отключение лампы L (или оповестительного устройства) через первый интервал времени (например, очень небольшой для практически мгновенного отключения), а Md 2 задает отключение лампы L (или оповестительного устройства) через второй интервал времени (например, гораздо больше первого, так что лампа остается включенной в течение определенного времени после того, как редукторный мотор M деактивирован и тем самым отключается с задержкой относительно подпорогового обнаружения потребляемой мощности).
После этого система возвращается к этапу начального управления CHK 1.
Пиковый ток, обнаруженный в 1a, обусловлен потреблением редукторного мотора M, и, следовательно, лампа L сигнализирует о его работе. Конкретные профили тока тем не менее могут указывать другие рабочие или неисправные режимы (например, перегрузку), и средство EM может, как следствие, вмешаться, сигнализируя посредством лампы L или выполняя действия с помощью других интерфейсов связи (не показаны). Очевидно, что лампа L может быть заменена или взаимодействовать с другими типами оповестительных устройств, как описано выше.

Изобретение относится к сигнализационному устройству и способу управления для автоматических механизмов, особенно для приведения в движение закрывающихся механизмов. Технический результат - расширение арсенала используемых средств. Способ регулирования сигнализационного устройства, вставленного в автоматический механизм ворот (G), раздвижных перегородок, дверей и т.п. и имеющего, по меньшей мере, одно оповестительное устройство (L, BZ), характеризуется тем, что он подает мощность от сигнализационного устройства (LL), по меньшей мере, в одну механическую группу (М), имеющую мотор, обнаруживает в сигнализационном устройстве (LL) мощность, потребленную от, по меньшей мере, одной механической группы (М), имеющей мотор, и активирует, по меньшей мере, одно оповестительное устройство (L, BZ), когда превышен заданный порог потребленной мощности. 3 н. и 19 з.п. ф-лы, 6 ил.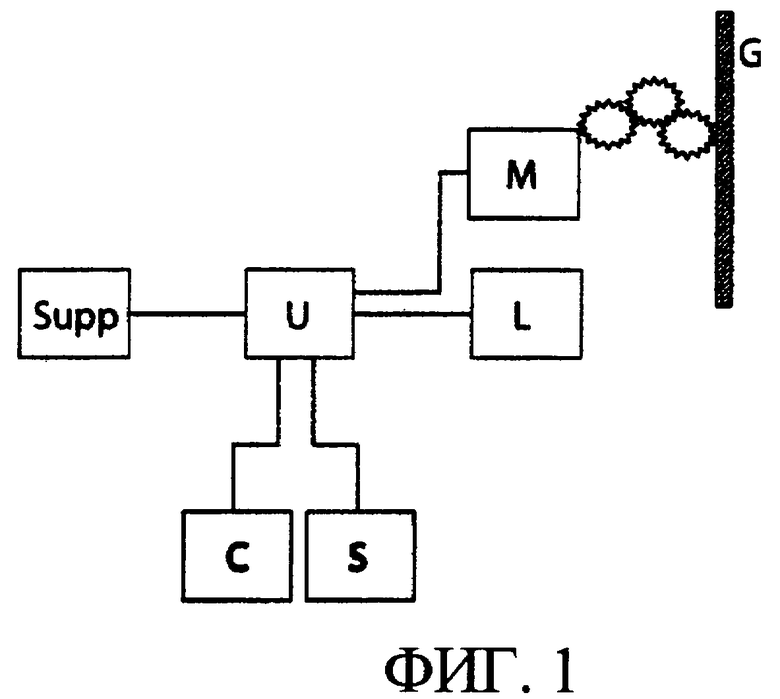
1. Способ управления сигнализационным устройством, вставленным в автоматический механизм ворот (G), раздвижных перегородок, дверей и т.п. и имеющим, по меньшей мере, одно оповестительное устройство (L, BZ), отличающийся тем, что
подают мощность от сигнализационного устройства (LL), по меньшей мере, в одну механическую группу (М), имеющую мотор;
обнаруживают в сигнализационном устройстве (LL) мощность, потребленную от, по меньшей мере, одной механической группы (М), имеющей мотор;
активируют, по меньшей мере, одно оповестительное устройство (L, BZ), когда превышен заранее заданный порог потребленной мощности.
2. Способ по п.1, отличающийся тем, что обнаруженную потребленную мощность сравнивают с несколькими заранее заданными порогами мощности.
3. Способ по п.2, отличающийся тем, что, если потребленная мощность превышает один из заранее заданных порогов мощности, активируют, по меньшей мере, одно оповестительное устройство (L, BZ).
4. Способ по п.1, отличающийся тем, что согласно функциональным параметрам, установленным вначале, по меньшей мере, одно оповестительное устройство (L, BZ) активируют с заранее определенной частотой.
5. Способ по п.1, отличающийся тем, что согласно функциональным параметрам, установленным вначале, по меньшей мере, одно оповестительное устройство (L, BZ) активируют непрерывно.
6. Способ по п.2, отличающийся тем, что, если потребленная мощность меньше заданного порога мощности, по меньшей мере, одно оповестительное устройство (L, BZ) деактивируют.
7. Способ по п.6, отличающийся тем, что согласно функциональным параметрам, установленным вначале, по меньшей мере, одно оповестительное устройство (L, BZ) деактивируют через заранее установленный интервал времени относительно подпорогового обнаружения потребленной мощности.
8. Способ по п.1, отличающийся тем, что потребленную мощность определяют посредством измерения тока, потребленного (Iа) посредством, по меньшей мере, одной механической группы (М), имеющей мотор.
9. Способ по п.1, отличающийся тем, что сигнализационное устройство (LL) также подает мощность в управляющий блок (U) и/или, по меньшей мере, одно командное устройство (С) автоматического механизма и/или, по меньшей мере, одно защитное устройство (S).
10. Сигнализационное устройство (LL) для автоматических механизмов ворот (G), раздвижных перегородок, дверей и т.п., имеющее оповестительное устройство (L, BZ), отличающееся тем, что содержит:
средство подачи мощности (T-OUT) для подачи мощности, по меньшей мере, в одну механическую группу (М), имеющую мотор;
средство (RR) обнаружения мощности, потребленной посредством, по меньшей мере, одной механической группы (М), имеющей мотор, из средства подачи мощности (T-OUT);
управляющее средство (ЕМ) для активации оповестительного устройства (L, BZ), когда заданный порог потребления мощности, обнаруженный посредством средства (RR) обнаружения, превышен.
11. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ) выполнено с возможностью сравнивать потребленную мощность с несколькими заданными порогами мощности и деактивировать, по меньшей мере, одно оповестительное устройство (L), если потребленная мощность ниже заданного порога мощности.
12. Сигнализационное устройство (LL) по п.10, отличающееся тем, что средство определения потребленной мощности содержит средство (RR) определения потребленного тока для определения потребления мощности, по меньшей мере, одной механической группой (М), имеющей мотор.
13. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ) выполнено с возможностью активировать, по меньшей мере, одно оповестительное устройство (L, BZ) с заранее установленной частотой.
14. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ) выполнено с возможностью непрерывно активировать, по меньшей мере, одно оповестительное устройство (L, BZ).
15. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ), если потребленная мощность или ток меньше заданного порога мощности или тока, выполнено с возможностью деактивировать, по меньшей мере, одно оповестительное устройство (L, BZ) после заранее установленной задержки.
16. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ) содержит микроконтроллер (ЕМ), подключенный к средству (РТ) формирования переменного напряжения, при этом микроконтроллер выполнен с возможностью считывать напряжение, чтобы получать пороговое значение мощности или тока.
17. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство содержит микроконтроллер (ЕМ), подключенный к средству (РТ) формирования переменного напряжения, при этом микроконтроллер выполнен с возможностью считывать напряжение, чтобы получать параметр, в отношении которого установлено управление, по меньшей мере, одного оповестительного устройства (L, BZ).
18. Сигнализационное устройство (LL) по п.10, отличающееся тем, что содержит средство подачи мощности для подачи мощности также в управляющий блок (U), и/или, по меньшей мере, одно командное устройство (С) автоматического механизма и/или, по меньшей мере, одно защитное устройство (S).
19. Сигнализационное устройство (LL) по п.10, отличающееся тем, что содержит лампу (L).
20. Сигнализационное устройство (LL) по п.10, отличающееся тем, что содержит механизм (T-IN) подачи мощности из внешнего источника (Supp), подключенного к стабилизованному средству (CPS) подачи мощности, выполненного с возможностью подавать мощность в компоненты (ЕМ) сигнализационного устройства (LL).
21. Сигнализационное устройство (LL) по п.10, отличающееся тем, что управляющее средство (ЕМ) выполнено с возможностью подсчитывать число активации, по меньшей мере, одной механической группы (М), имеющей мотор.
22. Автоматическая установка, содержащая устройство (LL) по пп.10-21.
| DE 19831119 A1, 20.01.2000 | |||
| US 4796011A, 03.01.1989 | |||
| US 5247232 A, 21.09.1993 | |||
| US 6078263 A, 20.06.2000 | |||
| US 6201318 B1, 13.03.2001 | |||
| Узловязатель для швейных машин | 1933 |
|
SU38413A1 |
| СИЛОВОЙ ПРИВОД ДВЕРИ И ПОДВЕСКА ДВЕРИ С ЗАПОРНЫМИ УСТРОЙСТВАМИ, ПРИВОДИМЫМИ В ДЕЙСТВИЕ ОТ ДВИГАТЕЛЯ | 1993 |
|
RU2114976C1 |

