Область техники, к которой относится изобретение
[1] Настоящее изобретение относится, в целом, к насосным узлам, в частности, к насосам с мокрым ротором и способу управления электрическим приводным мотором для привода такого насоса. Такие насосы в диапазоне мощности от 5 Вт до 3 кВт типично используются в циркуляционных насосах систем отопления домов.
Уровень техники
[2] Насос и, в частности, якорь статора электрического приводного мотора таких насосов обычно предназначаются для обеспечения некоторого напора H0 при нулевом расходе с максимальной эффективностью. Обычно, максимальная эффективность достигается посредством конструкции, которая предоставляет возможность обеспечения требуемого напора H0 при нулевом расходе в режиме без ослабления поля с максимальным коэффициентом модуляции, близким к 1.
[3] EP 2 133 911 описывает насос с управляемой скоростью, который использует ослабление поля, чтобы оптимизировать потребление электрической мощности при низких расходах.
Сущность изобретения
[4] В отличие от таких известных насосов варианты осуществления настоящего изобретения обеспечивают насосный узел с дополнительно оптимизированной конструкцией, которая является более эффективной для некоторых случаев нагрузки.
[5] В соответствии с первым аспектом настоящего изобретения насосный узел предоставляется содержащим насосный блок, выполненный с возможностью обеспечения требуемого напора H0 при нулевом расходе, бесщеточный приводной AC-мотор с регулируемой скоростью и постоянным магнитом для приведения в действие насосного блока, и блок управления для управления приводным мотором, при этом блок управления содержит преобразователь частоты, выполненный с возможностью приема входного напряжения Uin. Приводной мотор выполнен с возможностью работы в режиме ослабления поля и режиме без ослабления поля, при этом приводной мотор меньше стандартного размера для приведения в действие насосного блока при расчетном входном напряжении U0, чтобы обеспечивать более низкий напор H, чем требуемый напор H0, при нулевом расходе в режиме без ослабления поля, и для приведения в действие насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме ослабления поля. «Меньше стандартного размера» будет означать в данном документе, что выбранный расчетный параметр приводного мотора, в частности, якоря статора, такой как число витков обмотки статора и/или поперечное сечение провода обмотки статора, будет приводить в результате к напору H при нулевом расходе в режиме без ослабления поля, при этом напор H ниже H0. Это означает, что напор H0 является достижимым только с помощью приводного мотора меньше стандартного размера в режиме ослабления поля. Однако, поскольку работа в режиме ослабления поля, в целом, является менее эффективной, он не является предпочтительным режимом работы насоса, раскрытого в данном документе. Мотор меньше стандартного размера может работать более эффективно при более высоком выходном напряжении и более низком фазном токе, чем типовая конструкция во время частичной нагрузки мотора.
[6] Когда преобразователь частоты принимает фиксированное входное напряжение, расчетное входное напряжение U0 может быть выбрано как наименьшее возможное входное DC-напряжение Uin для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
[7] Насос, раскрытый в данном документе, предпочтительно работает в течение большей части времени использования в режиме без ослабления поля и необязательно с коэффициентом Модуляции M, который ниже максимального коэффициента модуляции Mmax ≈ 1. Коэффициент модуляции M должен быть определен в данном документе как соотношение между эффективным выходным AC-напряжением U out, т.е., выходным фазным напряжением относительно нейтрального потенциала, частотного преобразователя и максимальным эффективным выходным AC-напряжением Uout,max, которое ограничивается входным DC-напряжением Uin преобразователя частоты, т.е.,  . Другими словами, преобразователь частоты, главным образом, работает с частичной нагрузкой вместо полной нагрузки. При полной нагрузке эффективность мотора насоса, раскрытого в данном документе, ниже, чем для обычной конструкции мотора, но выше при частичной нагрузке, как будет объяснено более подробно ниже. Таким образом, обычная конструкция мотора оптимизируется для работы с полной нагрузкой, тогда как насос, раскрытый в данном документе, оптимизируется для работы с частичной нагрузкой, в то же время все еще предоставляя возможность добиваться требуемого H 0 при нулевом расходе в режиме ослабления поля при необходимости. В данном документе полная нагрузка означает, что преобразователь частоты питается максимальной входной мощностью, тогда как частичная нагрузка означает, что преобразователь частоты питается менее чем максимальной входной мощностью.
. Другими словами, преобразователь частоты, главным образом, работает с частичной нагрузкой вместо полной нагрузки. При полной нагрузке эффективность мотора насоса, раскрытого в данном документе, ниже, чем для обычной конструкции мотора, но выше при частичной нагрузке, как будет объяснено более подробно ниже. Таким образом, обычная конструкция мотора оптимизируется для работы с полной нагрузкой, тогда как насос, раскрытый в данном документе, оптимизируется для работы с частичной нагрузкой, в то же время все еще предоставляя возможность добиваться требуемого H 0 при нулевом расходе в режиме ослабления поля при необходимости. В данном документе полная нагрузка означает, что преобразователь частоты питается максимальной входной мощностью, тогда как частичная нагрузка означает, что преобразователь частоты питается менее чем максимальной входной мощностью.
[8] Необязательно, преобразователь частоты может быть сконфигурирован, чтобы предоставлять модулированное по ширине импульса выходное AC-напряжение U out с коэффициентом модуляции M приводному мотору. Коэффициент модуляции M может быть ниже максимального коэффициента модуляции Mmax ≈ 1 при работе с частичной нагрузкой. Необязательно, выходное AC-напряжение Uout может быть ограничено входным напряжением Uin при максимальном коэффициенте модуляции Mmax ≈ 1, например,  .
.
[9] Необязательно, блок управления может дополнительно содержать преобразователь напряжения для обеспечения входного напряжения Uin преобразователю частоты, при этом входное напряжение Uin является регулируемым в диапазоне напряжения между минимальным входным напряжением Uin,min и максимальным входным напряжением Uin,max. Таким образом, потери переключения в преобразователе частоты могут быть уменьшены, когда он работает при коэффициенте модуляции M, более близком к максимальному коэффициенту модуляции Mmax ≈ 1 при работе с частичной нагрузкой, поскольку Uout,max может быть уменьшено с помощью входного напряжения Uin. Таким образом, для различных случаев нагрузки входное напряжение Uin может быть настроено, чтобы поддерживать наивысший возможный коэффициент модуляции M для уменьшения потерь переключения в преобразователе частоты, насколько возможно.
[10] Необязательно, приводной мотор может содержать статор по меньшей мере с на 10% большим числом витков провода, имеющего по меньшей мере на 10% меньшее поперечное сечение по сравнению с эталонным приводным мотором, имеющим размер для приведения в действие насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля. Эталонный приводной мотор может быть определен как приводной мотор, имеющий число витков обмотки статора и сечение провода обмотки статора, которые будут приводить в результате к требуемому напору H0 при нулевом расходе в режиме без ослабления поля, предпочтительно при коэффициенте модуляции M, равном или близком к максимальному коэффициенту модуляции Mmax ≈ 1 при работе с полной нагрузкой. Любые другие параметры могут быть идентичными между эталонным приводным мотором и приводным мотором меньше стандартного размера, раскрытым в данном документе.
[11] Необязательно, мотор меньше стандартного размера, в частности, статор меньше номинального размера (иногда называемый обмоткой) может требовать по меньшей мере на 10% более высокое выходное напряжение Uout от преобразователя частоты, когда работает в режиме без ослабления поля по сравнению с эталонным приводным мотором, имеющим размер для приведения в действие насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля. Эталонный приводной мотор может быть определен здесь как имеющий конструкцию статора или якоря, которая приводит в действие насосный блок с расчетным входным напряжением U0, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля.
[12] Необязательно, преобразователь частоты выполнен с возможностью приема входного напряжения Uin ниже 60 В. Таким образом, электронные компоненты для электроники мотора могут быть более экономически эффективными.
[13] Необязательно, преобразователь напряжения может быть сконфигурирован, чтобы предоставлять входное напряжение Uin в диапазоне напряжения между минимальным входным напряжением Uin,min и эталонным напряжением Uref в режиме ослабления поля, и при этом преобразователь напряжения выполнен с возможностью обеспечения входного напряжения Uin в диапазоне напряжения между эталонным напряжением Uref и максимальным входным напряжением Uin,max в режиме без ослабления поля, при этом Uin,min < Uref < Uin,max. Эталонное напряжение Uref может быть определено в данном документе как входное напряжение Uin в режиме без ослабления поля, для которого коэффициент модуляции M является максимальным, т.е.,  . Таким образом, для уменьшения входного напряжения Uin ниже эталонного напряжения Uref мотор может быть задействован в режиме ослабления поля. Когда выборочно задействуется в режиме ослабления поля или режиме без ослабления поля, объединенная система из преобразователя частоты, мотора и преобразователя напряжения может иметь минимальную потерю мощности при более низком входном напряжении U in, чем при эталонном напряжении Uref. При частичной нагрузке, для того, чтобы предоставлять такое предпочтительное входное напряжение Uin, приводящее в результате к минимальной потере мощности, может быть полезным задействовать мотор меньше стандартного размера в режиме ослабления поля.
. Таким образом, для уменьшения входного напряжения Uin ниже эталонного напряжения Uref мотор может быть задействован в режиме ослабления поля. Когда выборочно задействуется в режиме ослабления поля или режиме без ослабления поля, объединенная система из преобразователя частоты, мотора и преобразователя напряжения может иметь минимальную потерю мощности при более низком входном напряжении U in, чем при эталонном напряжении Uref. При частичной нагрузке, для того, чтобы предоставлять такое предпочтительное входное напряжение Uin, приводящее в результате к минимальной потере мощности, может быть полезным задействовать мотор меньше стандартного размера в режиме ослабления поля.
[14] Необязательно, преобразователь частоты может быть сконфигурирован, чтобы работать с максимальным коэффициентом модуляции Mmax ≈ 1, когда входное напряжение U in приблизительно равно эталонному напряжению Uref. Это предпочтительно для случаев полной нагрузки в режиме без ослабления поля.
[15] Необязательно, в случае регулируемого входного напряжения, номинальное входное напряжение U 0 может быть максимальным входным напряжением Uin,max для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
[16] Необязательно, блок управления может быть сконфигурирован, чтобы определять фактическое потребление мощности по меньшей мере одного из приводного мотора и преобразователя частоты во время работы насосного блока, и при этом блок управления конфигурируется, чтобы настраивать входное напряжение Uin таким образом, что определенное фактическое потребление мощности минимизируется. Необязательно, насосный блок содержит циркуляционный насос с мокрым ротором для системы отопления или охлаждения.
[17] В соответствии со вторым аспектом настоящего изобретения предоставляется способ для управления бесщеточным приводным AC-мотором с регулируемой скоростью и постоянным магнитом через преобразователь частоты для приведения в действие насосного блока для обеспечения требуемого напора H0 при нулевом расходе, способ содержит:
-приведение в действие насосного блока при номинальном входном напряжении U0, чтобы обеспечивать более низкий напор H, чем требуемый напор H0, при нулевом расходе в режиме без ослабления поля,
-приведение в действие насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме ослабления поля.
[18] Необязательно, номинальное входное напряжение U0 может быть наименьшим возможным входным напряжением Uin для обеспечения напора H с нулевым расходом в режиме без ослабления поля. Необязательно, приведение в действие насосного блока при номинальном входном напряжении (U0), чтобы обеспечивать более низкий напор H, чем требуемый напор H0 при нулевом расходе в режиме без ослабления поля, может содержать приведение в действие насосного блока по меньшей мере с на 10% более высоким выходным напряжением Uout от преобразователя частоты к приводному мотору по сравнению с приведением в действие насосного блока с помощью эталонного приводного мотора, имеющего размер для приведения в действие насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля.
[19] Необязательно, способ может дополнительно содержать этап обеспечения модулированного по ширине импульса выходного AC-напряжения Uout с коэффициентом модуляции M приводному мотору.
[20] Необязательно, способ может дополнительно содержать обеспечение входного напряжения Uin преобразователю частоты, при этом входное напряжение Uin является регулируемым в диапазоне напряжения между минимальным входным напряжением Uin,max и максимальным входным напряжением Uin,max.
[21] Необязательно, в случае регулируемого входного напряжения Uin, номинальное входное напряжение U0 может быть максимальным входным напряжением Uin,max для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
[22] Необязательно, этап обеспечения входного напряжения Uin может содержать обеспечение входного напряжения Uin ниже 60 В.
[23] Необязательно, обеспечение входного напряжения Uin может содержать обеспечение входного напряжения Uin в диапазоне напряжения между минимальным входным напряжением Uin,min и эталонным напряжением Uref в режиме ослабления поля, и при этом обеспечение входного напряжения Uin включает в себя обеспечение входного напряжения Uin в диапазоне напряжения между эталонным напряжением Uref и максимальным входным напряжением Uin,max в режиме без ослабления поля, при этом Uin,min < Uref < Uin,max.
[24] Необязательно, способ может содержать работу преобразователя частоты с максимальным коэффициентом модуляции Mmax ≈ 1, когда входное напряжение U in приблизительно равно эталонному напряжению Uref.
[25] Необязательно, способ может дополнительно содержать определение фактического потребления мощности по меньшей мере одного из приводного мотора и преобразователя частоты во время работы блока насоса, при этом блок управления конфигурируется, чтобы настраивать входное напряжение U in таким образом, что определенное фактическое потребление мощности минимизируется.
Краткое описание чертежей
[26] Варианты осуществления настоящего изобретения будут сейчас описаны посредством примера со ссылкой на следующие чертежи, на которых:
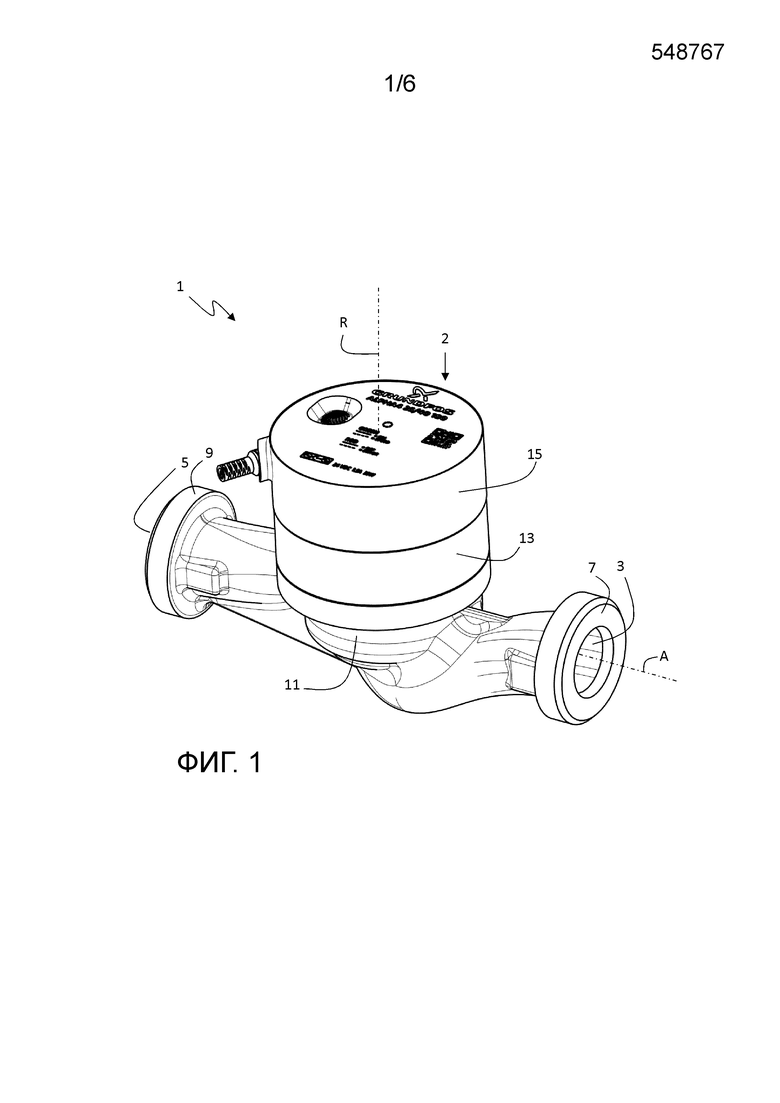
Фиг. 1 показывает вид в перспективе на примере насосного узла, раскрытого в данном документе;
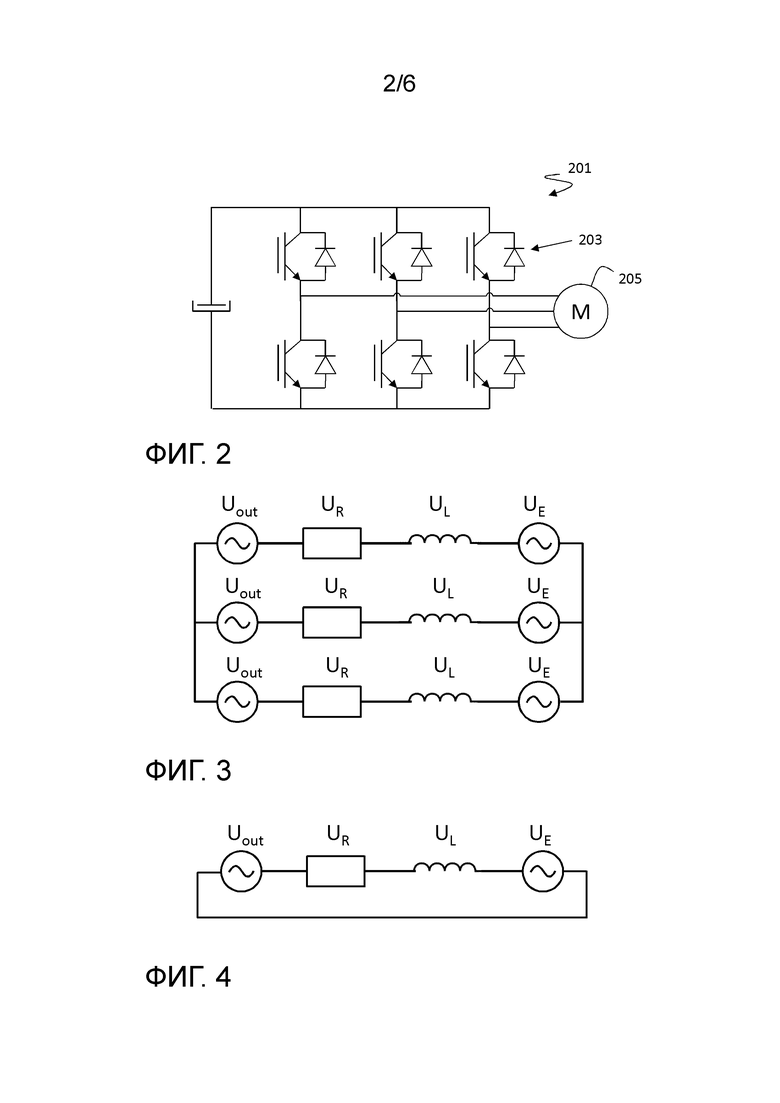
Фиг. 2 показывает принципиальную схему цепи питания блока управления согласно примеру насосного узла, раскрытого в данном документе;
Фиг. 3 показывает трехфазную эквивалентную цепь блока управления согласно примеру насосного узла, раскрытого в данном документе;
Фиг. 4 показывает однофазную эквивалентную цепь блока управления согласно примеру насосного узла, раскрытого в данном документе;
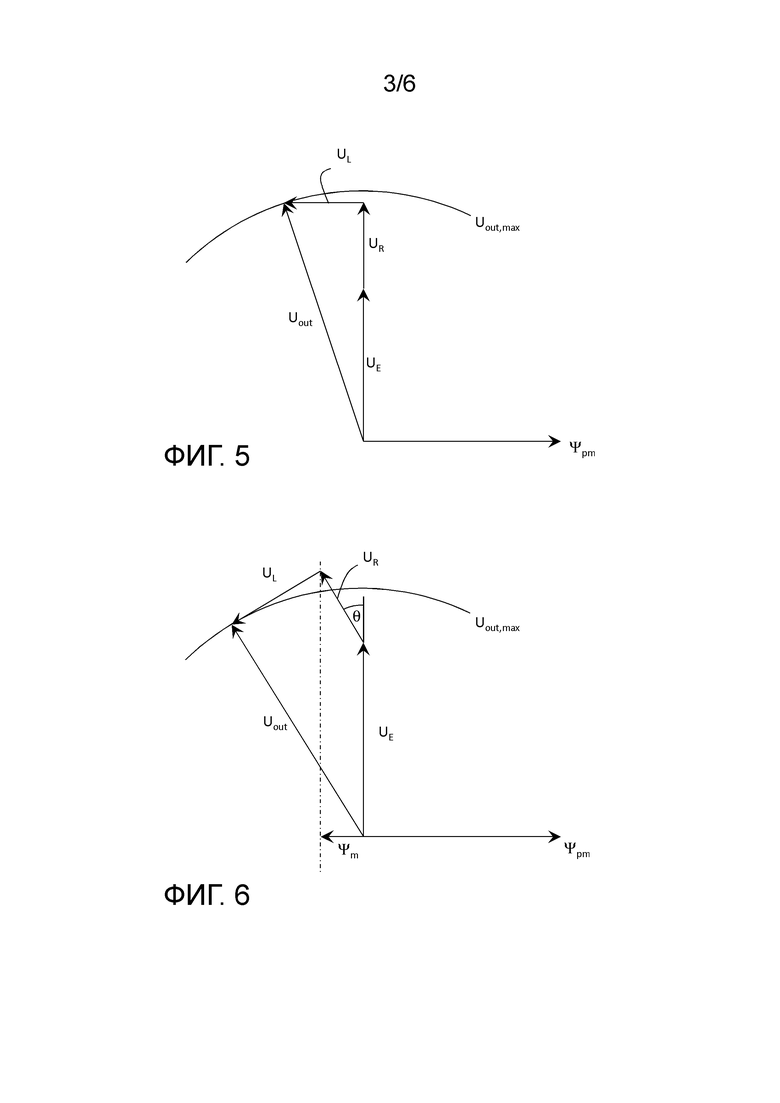
Фиг. 5 показывает векторную диаграмму для работы блока управления согласно примеру насосного узла, раскрытого в данном документе, в режиме без ослабления поля;
Фиг. 6 показывает векторную диаграмму для работы блока управления согласно примеру насосного узла, раскрытого в данном документе, в режиме ослабления поля;
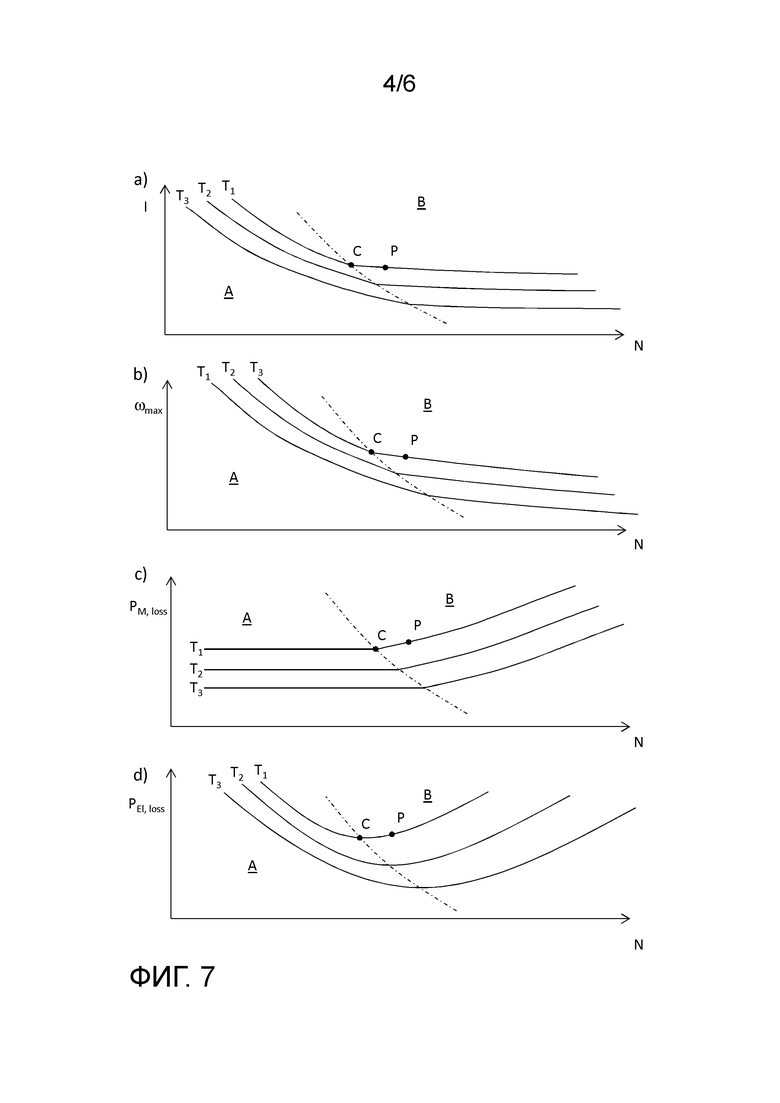
Фиг. 7 показывает номинальный фазный ток, номинальную скорость мотора, номинальную потерю мощности мотора и номинальную потерю мощности электроники для трех различных фиксированных номинальных крутящих моментов относительно числа витков обмотки статора;
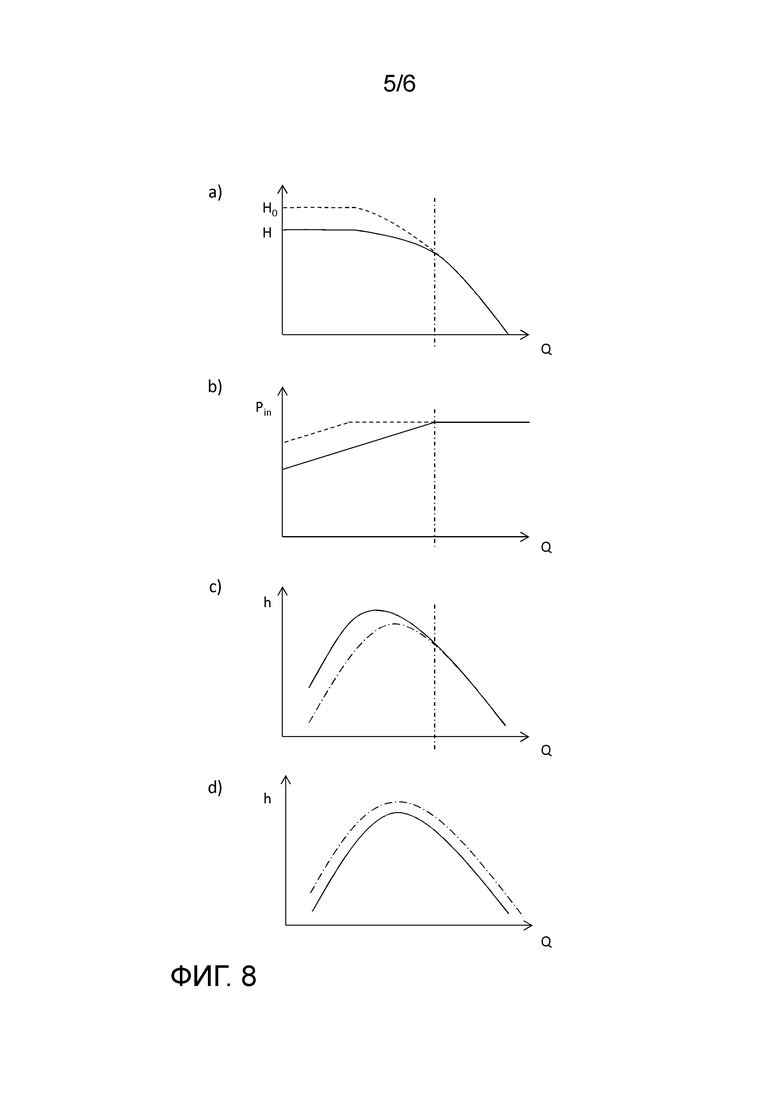
Фиг. 8 показывает HQ-диаграмму, PQ-диаграмму и две eQ-диаграммы для работы с полной и частичной нагрузкой, соответственно, преобразователя частоты согласно примеру насосного узла, раскрытого в данном документе; и
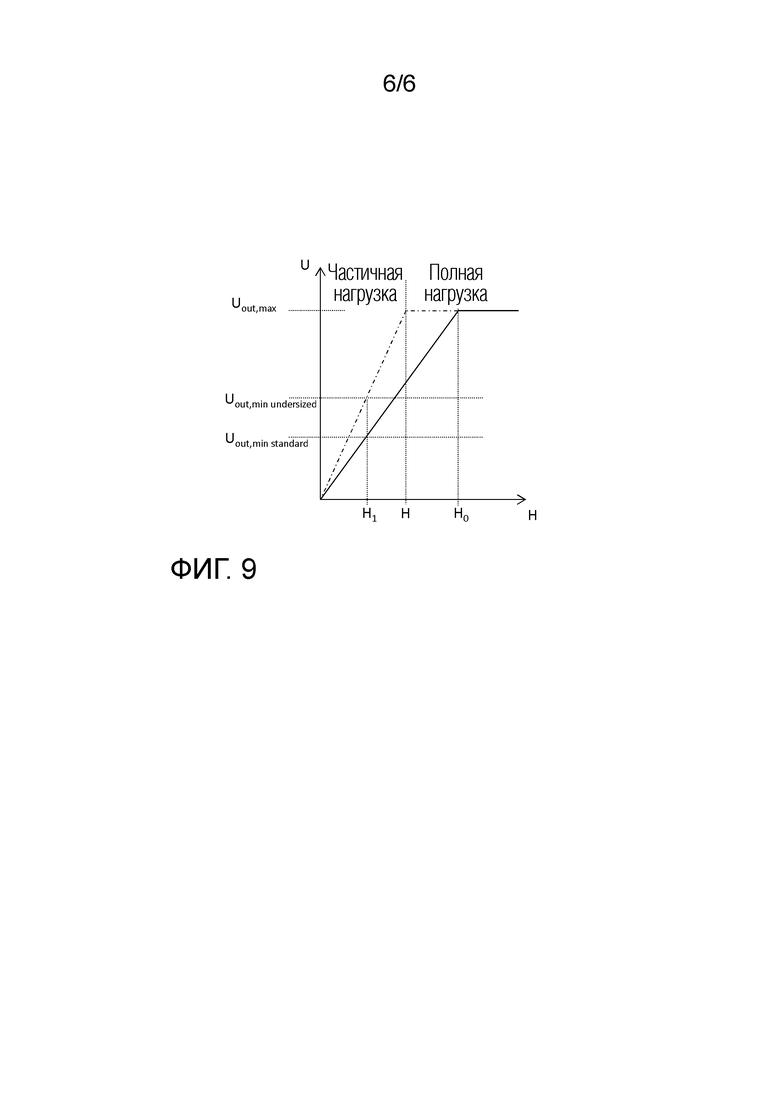
Фиг. 9 показывает UH-диаграмму согласно примеру насосного узла, раскрытого в данном документе, по сравнению со стандартной конструкцией мотора.
Подробное описание изобретения
[27] Фиг. 1 показывает насосный узел 1 с центробежным насосным блоком 2, входным отверстием 3 и выходным отверстием 5, при этом входное отверстие 3 и выходное отверстие 5 соосно размещаются на оси A трубы на противоположных сторонах насосного блока 2. Входное отверстие 3 и выходное отверстие 5 содержит соединительные фланцы 7, 9 для присоединения к трубам (не показаны). Насосный блок 2 содержит ось R ротора, практически перпендикулярную оси A трубы. Корпус 11 насоса насосного блока 2 практически размещается между входным отверстием 3 и выходным отверстием 5. Корпус 11 насоса содержит крыльчатку (не показана) для вращения вокруг оси R ротора и перекачивания жидкости от входного отверстия 3 к выходному отверстию 5. Крыльчатка приводится в действие мотором (не показан), расположенным в корпусе 13 мотора, протягивающемся от корпуса 11 насоса вдоль оси R ротора к корпусу 15 электроники. Корпус 15 электроники содержит инверторную схему 201 (см. фиг. 2) для управления трехфазным синхронным приводным мотором 205 с постоянным магнитом.
[28] Принципиальная схема на фиг. 2 иллюстрирует основной принцип инверторной схемы 201 частотного преобразователя блока управления мотором, расположенного в корпусе 15 электроники, инверторная схема 201 содержит шесть переключателей 203 в форме биполярных транзисторов с изолированным затвором (IGBT) или полевых транзисторов со структурой металл-оксид-полупроводник (MOSFET). Микроконтроллер (не показан) управляет шестью переключателями 203, чтобы создавать требуемое модулированное по ширине импульса выходное AC-напряжение U out для каждой фазы трехфазного мотора 205. Три фазы сдвинуты по фазе на 120° относительно друг друга для привода мотора 205. Входное напряжение U in, которое может называться напряжением вставки постоянного тока, может быть обеспечено в качестве входного инвертору 201 посредством выпрямителя (не показан) или преобразователя напряжения (не показан). Входное напряжение Uin может быть регулируемым, чтобы поддерживать максимальный коэффициент модуляции M при работе с частичной нагрузкой преобразователя частоты.
[29] Трехфазная эквивалентная схема на фиг. 3 упрощает основные компоненты для управления мотором. Три фазы являются идентичными и лишь сдвинуты по фазе на 120° относительно друг друга. Для каждой фазы выходное напряжение Uout получается в результате резистивной составляющей UR, индуктивной составляющей UL и противоэлектродвижущей силы UE (обозначенной аббревиатурой противо-ЭДС или обратная ЭДС). Обратная ЭДС UE является индуцированным напряжением, вызванным на обмотках статора перемещением ротора с постоянным магнитом, и, таким образом, зависит от магнитного потока ψ и скорости ω мотора по формуле UE=ψ ⋅ ω. Как дополнительно упрощено на фиг. 4 как однофазная эквивалентная схема, основные компоненты могут лишь рассматриваться для одной фазы.
[30] Векторная диаграмма во вращающейся системе координат на фиг. 5 иллюстрирует соотношение фаз между основными компонентами в режиме без ослабления поля. Магнитный поток Ψpm постоянного магнита сдвинут по фазе на 90° относительно фазного тока I. Выходное напряжение Uout получается в результате резистивного падения напряжения UR=R ⋅ I, обратной ЭДС UE и индуктивного падения напряжения UL=ω ⋅ L ⋅ I, где эффективная индуктивность L включает в себя как собственную индуктивность, так и индуктивность фазовой связи. Резистивное падение напряжения UR и обратная ЭДС UE являются синфазными, а индуктивное падение напряжения UL на 90° сдвинуто по фазе относительно резистивного падения напряжения UR. В примере, показанном на фиг. 5, коэффициент модуляции M является максимальным, так что выходное напряжение Uout практически равно максимальному выходному напряжению Uout,max, иллюстрированном окружностью. Приводной мотор меньше стандартного размера насоса, раскрытого в данном документе, предназначается, чтобы работать с максимальным коэффициентом Mmax модуляции, максимальным выходным напряжением Uout,max и скоростью ω в режиме без ослабления поля, чтобы обеспечивать напор H при нулевом расходе, как показано на фиг. 5.
[31] Для того, чтобы добиваться более высокого требуемого H0 при нулевом расходе, скорость ω должна быть увеличена в режиме ослабления поля, как показано на фиг. 6. Переключатели 201 управляются таким образом, что фазный ток I сдвигается по фазе на угол θ, таким образом, магнитный поток Ψm=I ⋅ L ⋅ sinθ индуцируется обмотками статора, ослабляющими результирующий магнитный поток в моторе Ψ=Ψpm+Ψm. Уменьшенный магнитный поток в моторе Ψ приводит в результате к меньшему крутящему моменту и гидравлической выходной мощности насоса, но может обеспечивать (с меньшей эффективностью) требуемый H0 при нулевом расходе. Уменьшенная эффективность является причиной того, почему традиционная конструкция мотора для насосов будет предусматривать параметры мотора, такие как число витков обмотки статора и/или поперечное сечение провода для достижения требуемого H0 при нулевом расходе посредством режима без ослабления поля, как изображено на фиг. 5. Однако, приводной мотор меньше стандартного размера для насоса, раскрытого в данном документе, может не быть задействован преимущественно в такой работе с полной нагрузкой преобразователя частоты. Большую часть времени преобразователь частоты работает с частичной нагрузкой в режиме без ослабления поля, для которого якорь меньше стандартного размера является более эффективным.
[32] Таким образом, режим ослабления поля означает, что фазный ток частично уменьшает суммарный магнитный поток, поскольку он сдвинут по фазе относительно магнитного потока ротора более чем на 90°. В режиме без ослабления поля фазный ток имеет сдвиг фазы 90° или меньше относительно магнитного потока ротора, так что составляющая фазного тока не уменьшает суммарный магнитный поток. Для того, чтобы измерять такой фазовый сдвиг, могут быть использованы датчики позиции. В качестве альтернативы или в дополнение к использованию датчиков позиции, измеряющих угол θ сдвига фаз, выходное напряжение Uout может быть измерено, чтобы определять, работает ли мотор в режиме ослабления поля или режиме без ослабления поля. При наличии определенного магнитного потока Ψ, сопротивления R, индуктивности L, скорости ω мотора и фазного тока I выходное напряжение Uout,calc может быть вычислено как

при предположении режима без ослабления поля, т.е., сдвига фаз 90° между UL и UR. Если измеренное выходное напряжение Uout ниже вычисленного выходного напряжения Uout,calc, мотор работает в режиме ослабления поля. Иначе он работает в режиме без ослабления поля.
[33] Таким образом, приводной мотор насоса может быть испытан на предмет того, имеет ли он размер меньше стандартного или не задействует ли насос с указанным минимальным входным напряжением, чтобы обеспечивать напор H0 при нулевом расходе согласно спецификации насоса. Магнитный поток Ψ, сопротивление R, индуктивность L, скорость ω мотора и фазный ток I могут быть измерены, чтобы вычислять Uout,calc при предположении режима без ослабления поля, как обрисовано выше. Если измеренное выходное напряжение Uout ниже вычисленного выходного напряжения Uout,calc, мотор работает в режиме ослабления поля и, следовательно, имеет размер меньше стандартного. Иначе, он работает в режиме без ослабления поля и, таким образом, имеет обычный размер.
[34] Фиг. 7 показывает различные рабочие параметры для трех фиксированных крутящих моментов T1, T2 и T3, где T1 > T2 > T3, как функцию числа витков обмотки N статора в качестве проектного параметра. В случае a) фазный ток I уменьшается в области A без ослабления поля с числом витков N статора. Традиционная конструкция мотора будет нацелена на уменьшение фазного тока для данного крутящего момента T1 посредством максимального числа витков вплоть до границы между областью A без ослабления поля и областью B ослабления поля (см. точку C). В отличие от него, приводной мотор меньше стандартного размера, раскрытый в данном документе, имеет по меньшей мере на 10% больше витков, чем он, и имеет рабочую точку P в области B ослабления поля для достижения напора H0 при нулевом расходе. В случае b) максимальная скорость ωmax аналогично ограничивается числом витков N. Приводной мотор меньше стандартного размера с большим числом витков в точке P имеет уменьшенную максимальную скорость ωmax по сравнению с традиционным эталонным мотором в точке C. Потеря мощности в моторе, как показано в случае c), является постоянной в области A без ослабления поля и повышается с числом витков N в области B без ослабления поля. Таким образом, традиционная конструкция мотора не будет превышать число витков статора в область B ослабления поля, поскольку это приводит в результате к потере мощности в моторе. Приводной мотор меньше стандартного размера в точке P имеет, таким образом, более высокую потерю мощности мотора для работы с полной нагрузкой. Потеря мощности электроники показана в случае d) с минимумом на границе между областью A без ослабления поля и областью B ослабления поля (см. точку C). Отклонение, аналогичное приводному мотору меньше стандартного размера в точке P приводит в результате к большей потере мощности электроники.
[35] Фиг. 8 a) показывает в диаграмме напора, т.е., HQ-диаграмме, в качестве сплошной линии кривую характеристики насоса с приводным мотором меньше стандартного размера, работающим в режиме без ослабления поля, в котором только напор H является достижимым при нулевом расходе. Прерывистая кривая отображает кривую характеристики насоса меньше стандартного размера в режиме ослабления поля, в котором она достигает требуемого H0. Традиционная конструкция насоса будет выбирать проектные параметры, чтобы следовать прерывистой кривой в режиме без ослабления поля. Причина для этого становится ясна на фиг. 8 b), показывающей более высокое потребление Pin мощности для работы в режиме ослабления поля (прерывистая линия) по сравнению с режимом без ослабления поля при высокой нагрузке преобразователя частоты. Фиг. 8c) показывает эффективность h=Pin/Pout при полной нагрузке преобразователя частоты в сравнении между традиционной конструкцией мотора (сплошная линия) и конструкцией меньше стандартного размера (штрихпунктирная линия). При полной нагрузке традиционная конструкция мотора является более эффективной для более низких расходов и является практически такой же для более высоких расходов. Однако, как показано на фиг. 8d), при частичной нагрузке преобразователя частоты только в режиме без ослабления поля, эффективность h=P in/Pout является более низкой для традиционной конструкции мотора (сплошная линия) по сравнению с конструкцией меньше стандартного размера (штрихпунктирная линия) в широком диапазоне расходов. Таким образом, приводной мотор меньше стандартного размера имеет свое преимущество, в частности, когда преобразователь частоты работает при частичной нагрузке.
[36] Фиг. 9 показывает выходное напряжение Uout как функцию напора H для стандартной конструкции мотора (сплошная линия) и конструкции мотора меньше стандартного размера (штрихпунктирная линия). При частичной нагрузке преобразователя частоты для обеспечения напора в диапазоне между H1 и H0, где H1 < H0, управление стандартным мотором будет изменять выходное напряжение Uout, приспособленное к необходимой скорости мотора. Для того, чтобы поддерживать высокий коэффициент модуляции M, входное напряжение Uin для преобразователя частоты может регулироваться соответствующим образом. Стандартная конструкция мотора будет добиваться требуемого напора H0 при максимальном выходном напряжении Uout,max с максимальным коэффициентом Mmax модуляции.
[37] При частичной нагрузке для обеспечения напора в диапазоне между H1 и H, где H1 < H, приводной мотор меньше стандартного размера работает при более высоком выходном напряжении по сравнению со стандартной конструкцией мотора для обеспечения того же напора. Минимальное выходное напряжение Uout,min undersized для обеспечения напора H1 выше минимального выходного напряжения Uout,min standard для стандартного мотора. Следовательно, мотор меньше стандартного размера может работать более эффективно с более низким фазным током I, чтобы обеспечивать ту же мощность Pout при частичной нагрузке преобразователя частоты. Следовательно, когда максимальное выходное напряжение Uout,max достигается при напоре H, мотор меньше стандартного размера должен переходить в менее эффективный режим ослабления поля для обеспечения более высокого, чем H, напора.
[38] Когда, в вышеприведенном описании, упоминаются целые части или элементы, которые имеют известные, очевидные или предвидимые эквиваленты, тогда такие эквиваленты включаются в данный документ, как если бы изложенные индивидуально. Ссылка должна быть сделана на формулу изобретения для определения истинных рамок настоящего изобретения, которые должны истолковываться так, чтобы охватывать любые такие эквиваленты. Читателем будет также оценено, что целые части или отличительные признаки описания изобретения, которые описываются как необязательные, предпочтительные, преимущественные, традиционные или т.п., являются необязательными и не ограничивают рамки независимых пунктов формулы изобретения.
[39] Вышеупомянутые варианты осуществления должны пониматься как иллюстративные примеры изобретения. Должно быть понятно, что любой признак, описанный по отношению к какому-либо одному варианту осуществления, может быть использован один или в комбинации с другими описанными признаками, и может также быть использован в комбинации с одним или более признаками любого другого из вариантов осуществления, или любой комбинации каких-либо других из вариантов осуществления. В то время как по меньшей мере один примерный вариант осуществления был показан и описан, следует понимать, что другие модификации, замены и альтернативы являются очевидными обычному специалисту в области техники и могут быть изменены без отступления от рамок предмета изучения, описанного в данном документе, и эта заявка предназначается, чтобы охватывать любые адаптации или разновидности конкретных вариантов осуществления, обсужденных в данном документе.
[40] Кроме того, термин «содержащий» не исключает другие элементы или этапы, а «один» не исключает множественное число. Кроме того, характеристики или этапы, которые были описаны со ссылкой на один из вышеописанных примерных вариантов осуществления, могут также быть использованы в сочетании с другими характеристиками или этапами других примерных вариантов осуществления, описанных выше. Этапы способа могут быть применены в любом порядке или параллельно или могут составлять часть или более подробную версию другого этапа способа. Следует понимать, что необходимо осуществлять в рамках патента, основанных на этом документе, все такие модификации как обоснованно и правильно происходящие в рамках усовершенствования существующего уровня техники. Такие модификации, замены и альтернативы могут быть выполнены без выхода за рамки сущности и объема изобретения, которые должны быть определены из прилагаемой формулы изобретения и ее законных эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАСОСНЫЙ УЗЕЛ И СПОСОБ УПРАВЛЕНИЯ | 2018 |
|
RU2696723C1 |
| Устройство для измерения отклонения емкости от номинала | 2016 |
|
RU2645868C1 |
| МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ МНОГОУРОВНЕВОГО ПРЕОБРАЗОВАТЕЛЯ | 2012 |
|
RU2600316C2 |
| ЦЕНТРОБЕЖНЫЙ НАСОСНЫЙ АГРЕГАТ | 2009 |
|
RU2455750C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ СИГНАЛА, ИМЕЮЩЕЕ ОДНОПОЛЯРНОЕ ПИТАНИЕ | 2022 |
|
RU2837273C2 |
| МНОГОКАНАЛЬНЫЙ ИМПУЛЬСНЫЙ ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ | 2024 |
|
RU2838912C1 |
| АДАПТИВНАЯ СХЕМА ДЛЯ УПРАВЛЕНИЯ СХЕМОЙ ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2427953C2 |
| УСТРОЙСТВО ДЛЯ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ ИЗМЕРЕННОГО НАПРЯЖЕНИЯ | 2005 |
|
RU2324286C1 |
| ИМПУЛЬСНЫЙ ИСТОЧНИК НАПРЯЖЕНИЯ | 2014 |
|
RU2551118C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2013 |
|
RU2579751C1 |
Изобретение относится к насосным узлам. Технический результат – обеспечение насосного узла с дополнительно оптимизированной конструкцией, за счет уменьшения размера приводного мотора, которая является эффективной даже для работы не с полной, а с частичной нагрузкой. Для этого насосный узел (1) содержит насосный блок (2), выполненный с возможностью обеспечения требуемого напора H0 при нулевом расходе, бесщеточный приводной AC-мотор (205) с регулируемой скоростью и постоянным магнитом для привода насосного блока (2) и блок управления приводным мотором (205), содержащий преобразователь частоты, выполненный с возможностью приема входного напряжения (Uin), где приводной мотор (205) работает в режиме ослабления поля и режиме без ослабления поля, где приводной мотор (205) имеет размер меньше стандартного для привода насосного блока (2) при номинальном входном напряжении (U0) для более низкого напора H, чем требуемый напор H0 при нулевом расходе в режиме без ослабления поля, и для привода насосного блока (2) для требуемого напора H0 при нулевом расходе в режиме ослабления поля. 2 н. и 21 з.п. ф-лы, 9 ил.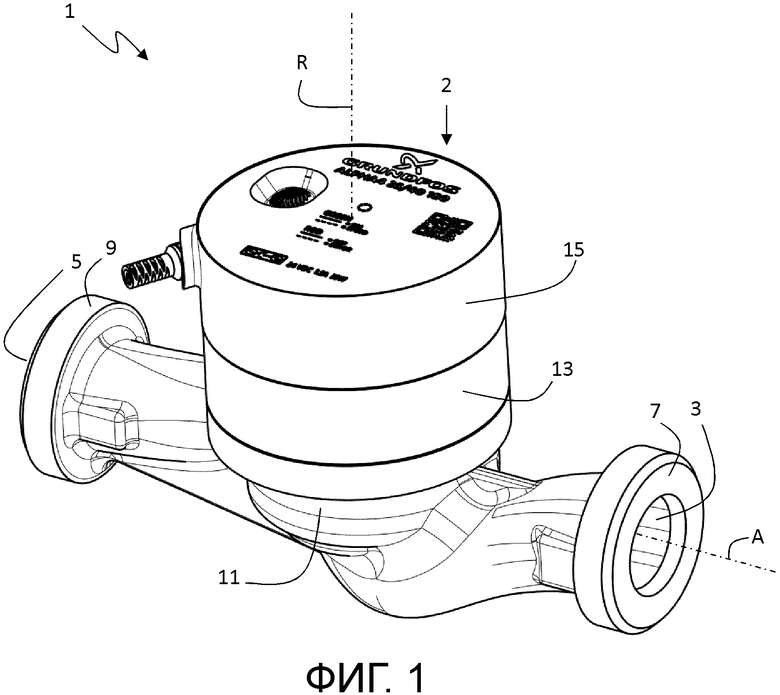
1. Насосный узел (1), содержащий
- насосный блок (2), выполненный с возможностью обеспечения требуемого напора H0 при нулевом расходе,
- бесщеточный приводной AC-мотор (205) с регулируемой скоростью и постоянным магнитом для привода насосного блока (2) и
- блок управления для управления приводным мотором (205),
при этом блок управления содержит преобразователь частоты, выполненный с возможностью приема входного напряжения (Uin),
причем приводной мотор (205) выполнен с возможностью работы в режиме ослабления поля и режиме без ослабления поля,
при этом приводной мотор (205) имеет размер меньше стандартного за счет таких выбранных расчетных параметров приводного мотора, как число витков обмотки статора и/или поперечное сечение провода обмотки, которые для привода насосного блока (2) с номинальным входным напряжением (U0), обеспечивают более низкий напор H, чем требуемый напор H0 при нулевом расходе в режиме без ослабления поля и для привода насосного блока (2) обеспечивают требуемый напор H0 при нулевом расходе в режиме ослабления поля.
2. Насосный узел (1) по п. 1, в котором преобразователь частоты выполнен с возможностью обеспечения модулированного по ширине импульса выходного AC-напряжения (Uout) с коэффициентом модуляции M приводному мотору (205).
3. Насосный узел (1) по п. 2, в котором выходное AC-напряжение (Uout) ограничено входным напряжением (Uin) при максимальном коэффициенте модуляции Mmax ≈ 1.
4. Насосный узел (1) по любому из предшествующих пунктов, в котором номинальное входное напряжение (U0) является наименьшим возможным входным напряжением (Uin) для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
5. Насосный узел (1) по любому из предшествующих пунктов, в котором блок управления дополнительно содержит преобразователь напряжения для обеспечения входного напряжения (Uin) преобразователю частоты, при этом входное напряжение (Uin) является регулируемым в диапазоне напряжения между минимальным входным напряжением (Uin,min) и максимальным входным напряжением (Uin,max).
6. Насосный узел (1) по любому из предшествующих пунктов, в котором приводной мотор (205) содержит статор с по меньшей мере на 10% большим числом витков провода, имеющего по меньшей мере на 10% меньшее поперечное сечение по сравнению с эталонным приводным мотором, имеющим размер для привода насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля.
7. Насосный узел (1) по любому из предшествующих пунктов, в котором приводной мотор (205) может требовать по меньшей мере на 10% более высокое выходное напряжение Uout от преобразователя частоты, когда работает в режиме без ослабления поля, по сравнению с эталонным приводным мотором, имеющим размер для привода насосного блока, чтобы обеспечивать требуемый напор H0 при нулевом расходе в режиме без ослабления поля.
8. Насосный узел (1) по любому из предшествующих пунктов, в котором преобразователь частоты выполнен с возможностью приема входного напряжения (Uin) ниже 60 В.
9. Насосный узел по любому из пп. 5-8, в котором преобразователь напряжения выполнен с возможностью обеспечения входного напряжения (Uin) в диапазоне напряжения между минимальным входным напряжением (Uin,min) и эталонным напряжением (Uref) в режиме ослабления поля, и при этом преобразователь напряжения выполнен с возможностью обеспечения входного напряжения (Uin) в диапазоне напряжения между эталонным напряжением (Uref) и максимальным входным напряжением (Uin,max) в режиме без ослабления поля, при этом Uin,min < Uref < Uin,max.
10. Насосный узел по п. 9, в котором преобразователь частоты выполнен с возможностью работы с максимальным коэффициентом модуляции Mmax ≈ 1, когда входное напряжение (Uin) приблизительно равно эталонному напряжению (Uref).
11. Насосный узел по любому из пп. 5-10, в котором номинальное входное напряжение (U0) является максимальным входным напряжением (Uin,max ) для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
12. Насосный узел (1) по любому из пп. 5-11, в котором блок управления выполнен с возможностью определения фактического потребления мощности по меньшей мере одного из приводного мотора (205) и преобразователя частоты во время работы насосного блока (2), и при этом блок управления выполнен с возможностью настройки входного напряжения (Uin) таким образом, что определенное фактическое потребление мощности минимизируется.
13. Насосный узел (1) по любому из предшествующих пунктов, в котором насосный блок (2) содержит циркуляционный насос с мокрым ротором для системы отопления или охлаждения.
14. Способ управления бесщеточным приводным AC-мотором с регулируемой скоростью и постоянным магнитом через преобразователь частоты для привода насосного блока (2) для обеспечения требуемого напора H0 при нулевом расходе, при этом приводной мотор имеет размер меньше стандартного за счет таких выбранных расчетных параметров приводного мотора, как число витков обмотки статора и/или поперечное сечение привода обмотки, включающий этапы, на которых:
- приводят в действие насосный блок (2) при номинальном входном напряжении (U0), чтобы обеспечить более низкий напор H, чем требуемый напор H0 при нулевом расходе в режиме без ослабления поля,
- приводят в действие насосный блок (2), чтобы обеспечить требуемый напор H0 при нулевом расходе в режиме ослабления поля.
15. Способ по п. 14, включающий этап, на котором обеспечивают модулированное по ширине импульса выходное AC-напряжение (Uout) с коэффициентом (M) модуляции приводному мотору.
16. Способ по п. 14 или 15, в котором номинальное входное напряжение (U0) является наименьшим возможным входным напряжением (Uin) для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
17. Способ по любому из пп. 14-16, в котором приведение в действие насосного блока (2) при номинальном входном напряжении (U0), чтобы обеспечить более низкий напор H, чем требуемый напор H0 при нулевом расходе в режиме без ослабления поля, включает этап, на котором приводят в действие насосный блок (2) с по меньшей мере на 10% более высоким выходным напряжением (Uout) от преобразователя частоты к приводному мотору по сравнению с приведением в действие насосного блока с помощью эталонного приводного мотора, имеющего размер для приведения в действие насосного блока, чтобы обеспечить требуемый напор H0 при нулевом расходе в режиме без ослабления поля.
18. Способ по любому из пп. 14-17, включающий этап, на котором обеспечивают входное напряжение (Uin) преобразователю частоты, при этом входное напряжение (Uin) является регулируемым в диапазоне напряжения между минимальным входным напряжением (Uin,min) и максимальным входным напряжением (Uin,max).
19. Способ по п. 18, в котором номинальное входное напряжение (U0) является максимальным входным напряжением (Uin,max) для обеспечения напора H при нулевом расходе в режиме без ослабления поля.
20. Способ по п. 18 или 19, в котором обеспечение входного напряжения (Uin) включает этап, на котором обеспечивают входное DC-напряжение (Uin) ниже 60 В.
21. Способ по любому из пп. 18-20, в котором обеспечение входного напряжения (Uin) включает этап, на котором обеспечивают входное напряжение (Uin) в диапазоне напряжения между минимальным входным напряжением (Uin,min) и эталонным напряжением (Uref) в режиме ослабления поля, и при этом обеспечение входного напряжения (Uin) включает в себя этап, на котором обеспечивают входное напряжение (Uin) в диапазоне напряжения между эталонным напряжением (Uref) и максимальным входным напряжением (Uin,max) в режиме без ослабления поля, при этом Uin,min < Uref < Uin,max.
22. Способ по п. 21, включающий этап, на котором приводят в действие преобразователь частоты с максимальным коэффициентом модуляции Mmax ≈ 1, когда входное напряжение (Uin) приблизительно равно эталонному напряжению (Uref).
23. Способ по любому из пп. 14-22, дополнительно включающий этап, на котором определяют фактическое потребление мощности по меньшей мере одного из приводного мотора (205) и преобразователя частоты во время работы насосного блока (2), и при этом блок управления выполнен с возможностью настройки входного напряжения (Uin) таким образом, что определенное фактическое потребление мощности минимизируется.
| US 9140264 B2, 22.09.2015 | |||
| US 3972653 A1, 03.08.1976 | |||
| НАСОСНЫЙ БЛОК | 2012 |
|
RU2610970C2 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2002 |
|
RU2214349C1 |
| ШЕСТЕРЕННЫЙ НАСОС | 2010 |
|
RU2543106C2 |

