Притязание на приоритет согласно §119 раздела 35 Свода законов США.
Настоящая заявка на патент притязает на приоритет предварительной заявки №60/711987, озаглавленной "СПОСОБ И УСТРОЙСТВО ДЛЯ НАДЕЖНОЙ ПЕРЕДАЧИ СЛУЖЕБНЫХ СИГНАЛОВ В БЕСПРОВОДНОЙ СВЯЗИ", зарегистрированной 26 августа 2005 года, назначенной на заявителя этого документа и явно включенной в настоящий документ по ссылке.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие имеет отношение к связи вообще, и в частности к методикам для надежной передачи служебных сигналов в беспроводной связи.
Предшествующий уровень техники
В системе связи передатчик может принимать кадры данных для передачи приемнику. Передатчик может обрабатывать (например, кодировать, чередовать и модулировать) каждый кадр данных для формирования символов данных и может мультиплексировать служебные сигналы с символами данных. Служебные сигналы могут указывать скорость передачи данных и/или другую информацию для кадра данных. Затем передатчик обрабатывает мультиплексированные символы данных и служебные сигналы для формирования модулированного сигнала и передает этот сигнал через канал связи.
Приемник принимает переданный сигнал и обрабатывает принятый сигнал для получения оценок символов данных, которые являются оценками символов данных, отправленных передатчиком. Приемник также может восстановить служебные сигналы для каждого кадра данных и затем обработать (например, демодулировать, подвергнуть обратному чередованию и декодировать) оценки символов данных в соответствии с восстановленными служебными сигналами для получения декодированного кадра, который является оценкой кадра данных, отправленного передатчиком.
Приемнику может быть необходимо правильно восстановить служебные сигналы, чтобы должным образом обработать оценки символов данных и получить правильно декодированный кадр. Поэтому в области техники имеется потребность в методиках для достижения надежной передачи служебных сигналов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним вариантом воплощения изобретения устройство содержит по меньшей мере один процессор для приема кадра, содержащего кодированные данные и служебные сигналы, для определения качества принятого сигнала принятого кадра, для определения, являются ли служебные сигналы надежными, на основе качества принятого сигнала, и если служебные сигналы считаются надежными, для восстановления служебных сигналов и декодирования кодированных данных в соответствии с восстановленными служебными сигналами и память, соединенную по меньшей мере с одним процессором.
Другой вариант воплощения включает в себя способ, содержащий этапы, на которых принимают кадр, содержащий кодированные данные и служебные сигналы; определяют качество принятого сигнала принятого кадра; определяют, являются ли служебные сигналы надежными, на основе качества принятого сигнала; и если служебные сигналы считаются надежными, восстанавливают служебные сигналы и декодируют кодированные данные в соответствии с восстановленными служебными сигналами.
Другой вариант воплощения включает в себя устройство, содержащее средство для приема кадра, содержащего кодированные данные и служебные сигналы; средство для определения качества принятого сигнала принятого кадра; средство для определения, являются ли служебные сигналы надежными, на основе качества принятого сигнала; средство для восстановления служебных сигналов, если они считаются надежными; и средство для декодирования кодированных данных в соответствии с восстановленными служебными сигналами, если служебные сигналы считаются надежными.
Другой вариант воплощения включает в себя читаемые с помощью процессора носители для хранения команд, предписывающих принимать кадр, содержащий кодированные данные и служебные сигналы; определять качество принятого сигнала принятого кадра; определять, являются ли служебные сигналы надежными, на основе качества принятого сигнала; и если служебные сигналы считаются надежными, восстанавливать служебные сигналы и декодировать кодированные данные в соответствии с восстановленными служебными сигналами.
Другой вариант воплощения включает в себя способ, содержащий этапы, на которых определяют, применима ли улучшенная надежность для служебных сигналов для кадра данных; отправляют служебные сигналы без улучшенной надежности, если она считается не применимой; и отправляют служебные сигналы с улучшенной надежностью, если она считается применимой.
Другой вариант воплощения включает в себя устройство, содержащее средство для определения, применима ли улучшенная надежность для служебных сигналов для кадра данных; средство для отправки служебных сигналов без улучшенной надежности, если она считается не применимой; и средство для отправки служебных сигналов с улучшенной надежностью, если она считается применимой.
Ниже более подробно описаны различные аспекты и варианты воплощения изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает систему связи с многостанционным доступом.
Фиг.2 показывает структуру кадра с тремя уровнями в технологии UTRA TDD LCR.
Фиг.3 показывает формат пакета в технологии UTRA TDD LCR.
Фиг.4 показывает обработку кадра данных посредством передатчика в технологии UTRA TDD LCR.
Фиг.5A, 5B и 5C показывают передачу кодового слова индикатора комбинации транспортных форматов (TFCI) без повторения, с 2-кратным повторением и с 4-кратным повторением соответственно.
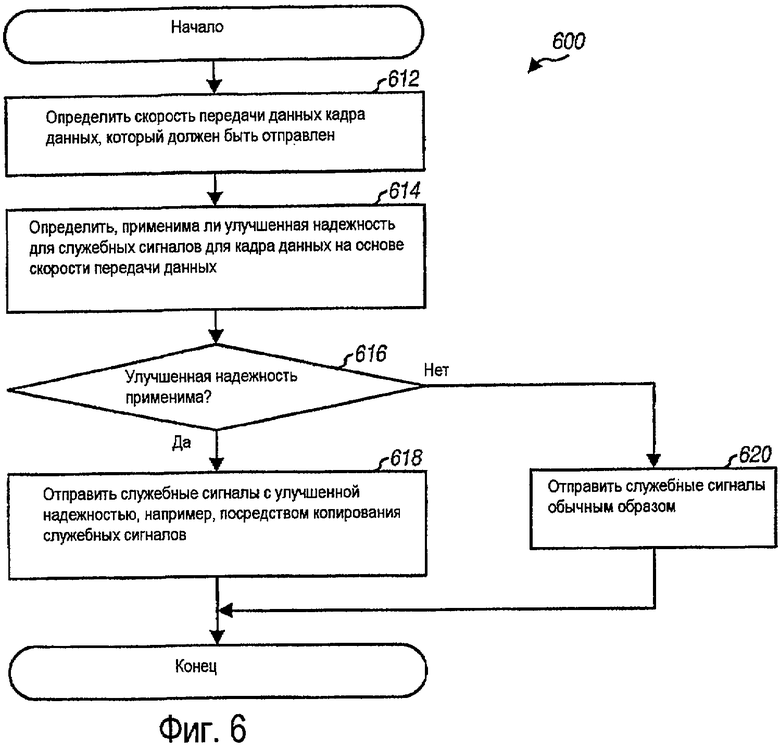
Фиг.6 показывает процесс для отправки служебных сигналов посредством передатчика.
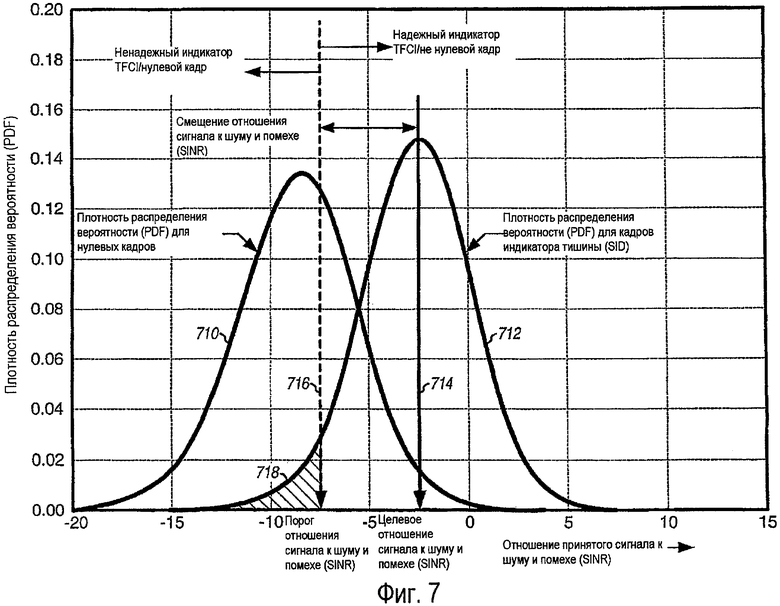
Фиг.7 показывает взаимосвязь между целевым отношением сигнала к шуму и помехе (SINR), смещением отношения сигнала к шуму и помехе (SINR) и порогом отношения сигнала к шуму и помехе (SINR).
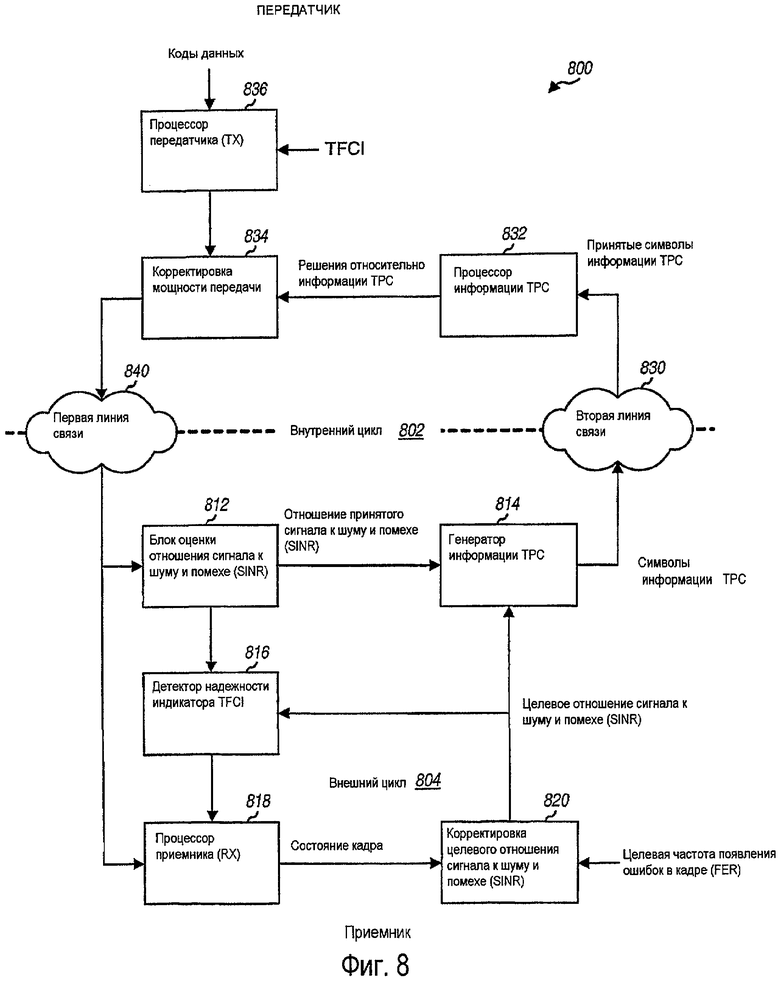
Фиг.8 показывает механизм управления мощностью.
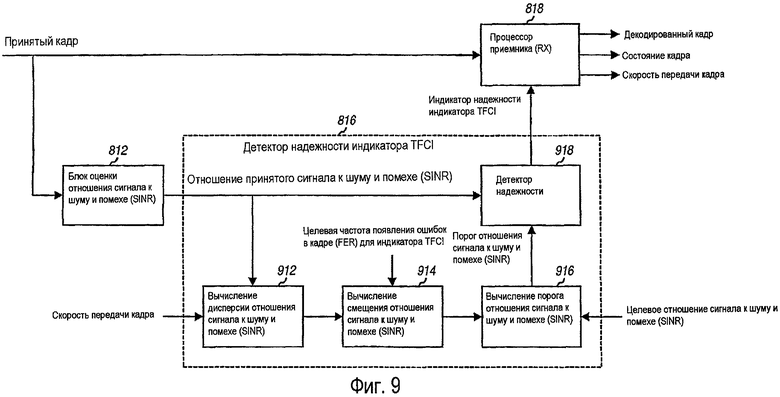
Фиг.9 показывает датчик надежности индикатора комбинации транспортных форматов (TFCI).
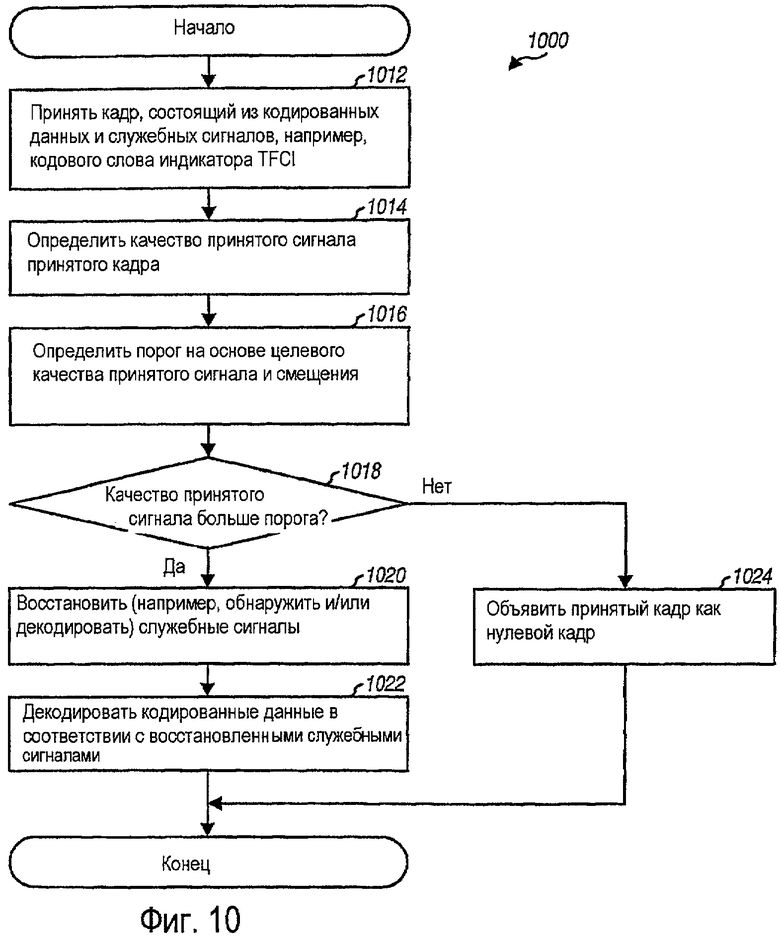
Фиг.10 показывает процесс для обработки данных посредством приемника.
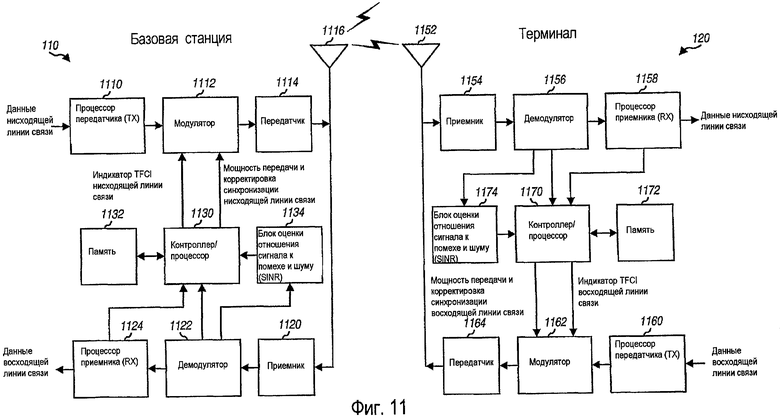
Фиг.11 показывает блок-схему базовой станции и терминала.
ПОДРОБНОЕ ОПИСАНИЕ
Слово "иллюстративный" используется здесь для обозначения "служащий примером, экземпляром или иллюстрацией". Любой вариант воплощения, описанный здесь как "иллюстративный", не должен обязательно рассматриваться как предпочтительный или выгодный по сравнению с другими вариантами воплощения.
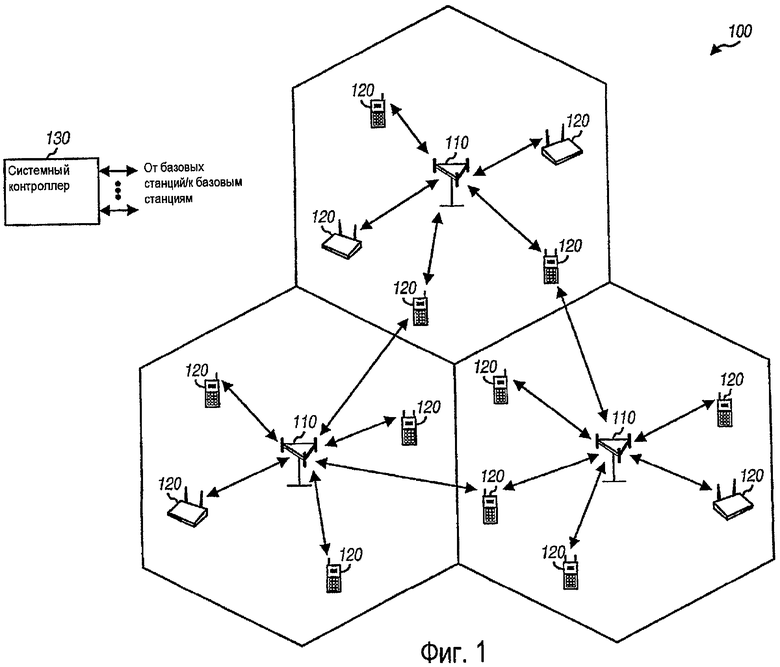
Фиг.1 показывает систему 100 связи с многостанционным доступом с несколькими базовыми станциями 110 и несколькими терминалами 120. Базовая станция в общем случае является стационарной станцией, которая взаимодействует с терминалами и может также быть названа узлом B, точкой доступа или какими-либо другими терминами. Каждая базовая станция 110 обеспечивает покрытие связи для конкретной географической области. Системный контроллер 130 соединен с базовыми станциями 110 и обеспечивает координацию и управление для этих базовых станций.
Терминал может являться стационарным или мобильным и также может быть назван пользовательским оборудованием, мобильной станцией или какими-либо другими терминами. Терминал может не взаимодействовать с базовыми станциями или взаимодействовать с одной или несколькими базовыми станциями в любой заданный момент. Терминал может являться сотовым телефоном, карманным компьютером (PDA), абонентской установкой, беспроводным модемом, беспроводным устройством и т.д. В последующем описании термины "терминал" и "пользователь" используются взаимозаменяемо.
Описанные здесь методики могут использоваться для различных систем беспроводной связи, таких как системы многостанционного доступа с кодовым разделением каналов (CDMA), системы многостанционного доступа с временным разделением каналов (TDMA), системы многостанционного доступа с частотным разделением каналов (FDMA) и системы многостанционного доступа с ортогональным частотным разделением каналов (OFDMA). Система CDMA может реализовать беспроводную технологию, такую как cdma2000, дуплексная связь с временным разделением универсального наземного беспроводного доступа (UTRA TDD) или дуплексная связь с частотным разделением универсального наземного беспроводного доступа (UTRA FDD). Технология cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. Технология UTRA TDD включает в себя варианты с 1,28, 3,84 и 7,68 Mcps (миллионов элементарных сигналов в секунду). Технология UTRA TDD с 3,84 и 7,68 Mcps также называется CDMA с временным разделением (TD-CDMA) или высокой скоростью передачи элементарных сигналов (HCR). Технология UTRA TDD с 1,28 Mcps также называется синхронным доступом CDMA с временным разделением каналов (TD-SCDMA) или низкой скоростью передачи элементарных сигналов (LCR). Технология UTRA FDD также называется широкополосным доступом CDMA (W-CDMA). Система TDMA может реализовать беспроводную технологию, такую как глобальная система для мобильной связи (GSM). Технологии UTRA TDD, UTRA FDD и GSM описываются в документах организации, называемой "Проектом партнерства для создания сетей третьего поколения" (3GPP). Технология cdma2000 описывается в документах организации, называемой "Проектом-2 партнерства для создания сетей третьего поколения" (3GPP2). Эти различные технологии и стандарты беспроводной связи известны в области техники. Для ясности методики описываются далее для технологии UTRA TDD LCR.
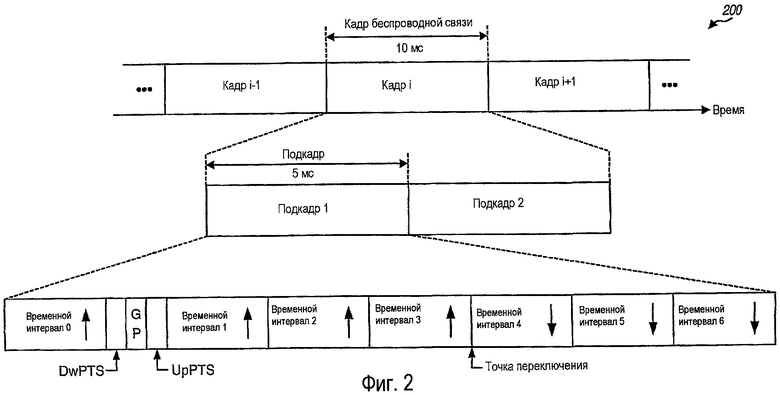
Фиг.2 показывает структуру 200 кадра с тремя уровнями в технологии UTRA TDD LCR. Линия времени передачи делится на кадры, каждый кадр идентифицирован посредством системного номера кадра (SFN). Каждый кадр имеет продолжительность 10 миллисекунд (мс) и делится на два подкадра 1 и 2. Каждый подкадр имеет продолжительность 5 мс и делится на семь временных интервалов от 0 до 6, временной интервал контрольного сигнала нисходящей линии связи (DwPTS), временной интервал контрольного сигнала восходящей линии связи (UpPTS) и защитный период (GP). Временной интервал 0 используется для нисходящей линии связи, временной интервал 1 используется для восходящей линии связи, и временные интервалы 2-6 могут использоваться для нисходящей линии связи и/или восходящей линии связи, как определено посредством точки переключения.
Каждый временной интервал может быть назначен одному или нескольким пользователям. Передача для пользователя во временном интервале называется пакетом. Пакет может нести информационные данные, управляющие данные, индикатор комбинации транспортных форматов (TFCI), информацию управления мощностью передачи (TPC), сдвиг синхронизации (SS) или их комбинацию. Индикатор комбинации транспортных форматов (TFCI) указывает скорость передачи данных кадра данных. Эта скорость передачи данных связана с различными параметрами, такими как, например, размер кадра, скорость передачи кода, схема модуляции и т.д. Информация управления мощностью передачи (TPC) используется для регулировки мощности передачи. Сдвиг синхронизации (SS) используется для регулировки синхронизации, чтобы пакеты от разных терминалов прибывали в базовую станцию выровненными по времени. В технологии UTRA TDD определены различные форматы пакета.
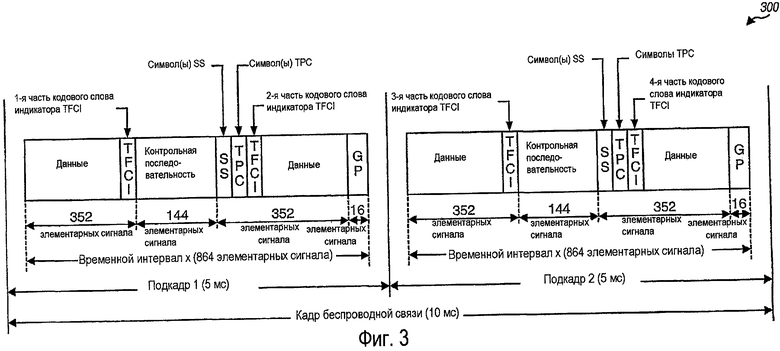
Фиг.3 показывает формат 300 пакета для случая, в котором пакет несет информацию индикатора комбинации транспортных форматов (TFCI), управления мощностью передачи (TPC) и сдвига синхронизации (SS). Формат 300 пакета может использоваться для нисходящей линии связи и восходящей линии связи. Формат 300 пакета охватывает два пакета, которые будут отправлены в двух временных интервалах, одном временном интервале в подкадре 1 и другом временном интервале в подкадре 2. Каждый пакет включает в себя первое поле данных, поле контрольной последовательности, второе поле данных и защитный период (GP). Четыре поля каждого пакета имеют длины (в элементарных сигналах), показанные на фиг.3.
Четыре поля данных двух пакетов несут символы данных для кадра данных. Кодовое слово индикатора комбинации транспортных форматов (TFCI) делится на четыре части, которые вставляются в четыре поля данных в местоположениях, показанных на фиг.3. Символ(ы) сдвига синхронизации (SS) и символ(ы) информации управления мощностью передачи (TPC) также могут быть вставлены во второе поле данных каждого пакета в местоположениях, показанных на фиг.3.
В технологии UTRA TDD символы данных и символы индикатора комбинации транспортных форматов (TFCI) во временном интервале подвергаются спектральному расширению с помощью одного и того же кода Уолша. Этот код Уолша имеет коэффициент расширения SF, который может быть равен 1, 2, 4, 8 или 16. Коэффициент расширения определяет количество раз, которое данный символ копируется и отправляется во временном интервале. Коэффициент расширения, таким образом, является одним фактором, который определяет надежность символа. Поскольку количество элементарных сигналов во временном интервале фиксировано, коэффициент расширения определяет количество символов, которые можно отправить во временном интервале. В частности, временной интервал может нести 704/SF символов в двух полях данных временного интервала.
В технологии UTRA TDD терминалу может быть назначен выделенный информационный канал (DTCH) и выделенный канал управления (DCCH) и для нисходящей линии связи, и восходящей линии связи. Канал DTCH несет информационные данные, например, для голоса, пакетных данных и т.д. Один кадр данных может быть отправлен по каналу DTCH в каждом интервале времени передачи (TTI), который может составлять 20 мс или некоторую другую продолжительность. Кадр данных также может называться пакетом, кодовым словом данных, блоком данных и т.д. Канал DCCH несет служебные сигналы. Один управляющий кадр может быть отправлен по каналу DCCH в каждом интервале, составляющем 40 мс.
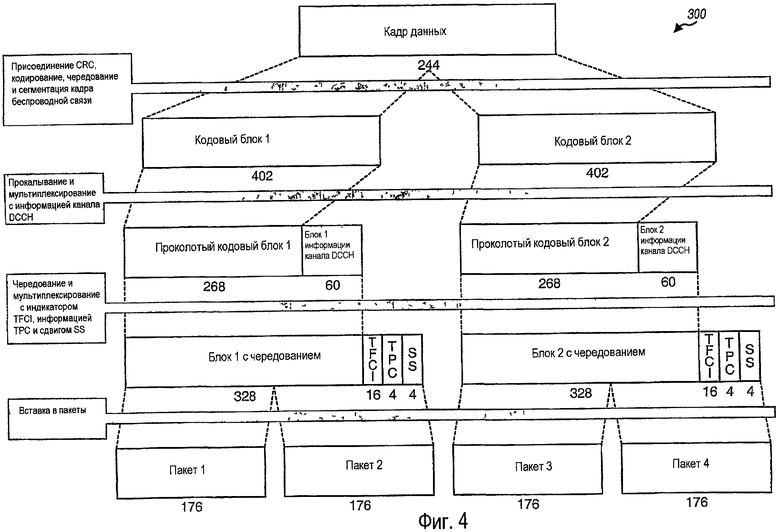
Фиг.4 показывает обработку кадра данных посредством передатчика в технологии UTRA TDD LCR. Передатчик выполняет присоединение циклического избыточного кода (CRC), сверточное кодирование, чередование и сегментацию кадров беспроводной связи кадра данных для формирования двух кодовых блоков. Код CRC используется приемником для обнаружения ошибок. Затем передатчик выполняет прокалывание и сопоставление скорости передачи для каждого кодового блока для получения проколотого кодового блока, имеющего желаемое количество кодовых битов. Передатчик мультиплексирует каждый проколотый кодовый блок с блоком канала DCCH, чередует каждый набор кодового блока и блока канала DCCH для формирования чередованного блока и присоединяет индикатор комбинации транспортных форматов (TFCI), информацию управления мощностью передачи (TPC) и сдвиг синхронизации (SS) к каждому чередованному блоку. Затем передатчик выполняет сегментацию интервала и формирует четыре пакета для кадра данных.
Передатчик может принимать информационные данные на различных скоростях передачи данных для передачи приемнику. В качестве примера, передатчик может иметь речевой вызов и может принимать голосовые кадры, сформированные посредством адаптивного многоскоростного (AMR) речевого кодека на скоростях передачи данных в пределах от 12,2 до 4,75 килобит в секунду (кбит/с). Передатчик также может принимать кадры индикатора тишины (SID) во время периодов тишины (например, пауз) и нулевые кадры. Передатчик может обрабатывать каждый кадр данных с подходящей кодовой скоростью для формирования надлежащего количества кодовых битов для передачи в четырех временных интервалах. Передатчик может использовать различные кодовые скорости для кадров данных с различными скоростями передачи данных.
На фиг.4 количество битов в каждом блоке зависит от скорости передачи данных кадра данных, осуществляется ли отправка информации канала DCCH и осуществляется ли отправка индикатора комбинации транспортных форматов (TFCI), информации управления мощностью передачи (TPC) и сдвига синхронизации (SS). Фиг.4 показывает количество битов в каждом блоке для случая, в котором скорость передачи данных составляет 12,2 кбит/с, и осуществляется отправка информации DCCH, индикатора комбинации транспортных форматов (TFCI), информации управления мощностью передачи (TPC) и/или сдвига синхронизации (SS) с помощью кадра данных. Если отправка информации DCCH, индикатора комбинации транспортных форматов (TFCI), информации управления мощностью передачи (TPC) и/или сдвига синхронизации (SS) не осуществляется, то количество битов в каждом проколотом кодовом блоке увеличивается на соответствующее количество битов, поскольку количество битов в каждом пакете фиксировано. Кодовая скорость определяется посредством количества битов в кадре данных и количества битов в двух проколотых кодовых блоках.
Каждая кодовая скорость ассоциируется с конкретным минимальным качеством принятого сигнала, требуемым для достижения целевого уровня эффективности. Качество принятого сигнала может быть количественно определено с помощью отношения сигнала к шуму и помехе (SINR), отношения сигнала к шуму (SNR), отношения энергии на символ к полному шуму (Es/Nt) или какой-либо другой меры. Для ясности ниже в большей части описания для качества принятого сигнала используется отношение сигнала к шуму и помехе (SINR). Целевой уровень эффективности может быть количественно определен с помощью конкретной частоты появления ошибок в кадре (FER), например, равной 1%. Для кадров данных, закодированных с различными кодовыми скоростями, могут использоваться различные уровни мощности передачи. Например, когда осуществляется отправка информации канала DCCH, кадр индикатора тишины (SID) может быть передан с мощностью на 4,5 децибел (дБ) меньше, чем кадр с данными со скоростью передачи 12 кбит/с, и нулевой кадр может быть передан с мощностью на 6,4 дБ меньше, чем кадр с данными со скоростью передачи 12 кбит/с, для той же самой целевой частоты появления ошибок в кадре (FER). Кадры с данными со скоростью передачи 12 кбит/с, кадры индикатора тишины (SID) и нулевые кадры без информации канала DCCH могут быть переданы с более низкой мощностью, чем кадры с данными со скоростью передачи 12 кбит/с, кадры индикатора тишины (SID) и нулевые кадры с информацией канала DCCH.
Индекс или значение индикатора комбинации транспортных форматов (TFCI) могут быть отправлены в каждом закодированном составном транспортном канале (CCTrCH) для указания формата, используемого для этого канала CCTrCH. Канал CCTrCH представляет собой мультиплексирование данных для всех назначенных транспортных каналов в одном интервале времени передачи (TTI), который может составлять 20 мс для голоса. Передача индикатора комбинации транспортных форматов (TFCI) конфигурируется посредством более высоких уровней. Каждый распределенный временной интервал также включает в себя служебные сигналы более высокого уровня для указания того, несет ли этот временной интервал индикатор комбинации транспортных форматов (TFCI). Индикатор комбинации транспортных форматов (TFCI) присутствует в первом временном интервале кадра беспроводной связи для каждого канала CCTrCH.
Индекс индикатора комбинации транспортных форматов (TFCI) может включать в себя от 1 до 10 информационных битов (или битов индикатора комбинации транспортных форматов (TFCI)), которые кодируются для формирования кодового слова индикатора комбинации транспортных форматов (TFCI). Индекс индикатора комбинации транспортных форматов (TFCI) кодируется различным образом в зависимости от количества битов индикатора комбинации транспортных форматов (TFCI) и выбранной схемы модуляции. Таблица 1 резюмирует кодирование индекса индикатора комбинации транспортных форматов (TFCI) для квадратурной фазовой манипуляции (QPSK) и 8-кратной фазовой манипуляции (8-PSK) для различного количества битов индикатора комбинации транспортных форматов (TFCI). Кодирование индикатора комбинации транспортных форматов (TFCI) описывается в нормативном документе 3GPP TS 25.222, озаглавленном "Мультиплексирование и кодирование канала (технология TDD)", выпуск 7, март 2006 года, который является общедоступным. Кодовое слово индикатора комбинации транспортных форматов (TFCI) можно отправить с помощью 2, 4, 8 или 16 символов индикатора комбинации транспортных форматов (TFCI). Символы индикатора комбинации транспортных форматов (TFCI) расширяются с помощью того же самого кода Уолша, как и символы данных.
повторение
повторение
В технологии UTRA TDD все символы временного интервала передаются на одном и том же уровне мощности. Схемы кодирования для индикатора комбинации транспортных форматов (TFCI) не являются такими же сильными, как сверточный код, используемый для части данных. Следовательно, когда мощность передачи устанавливается на более низкий уровень для кадра данных с более низкой скоростью передачи, более низкая мощность передачи может быть недостаточной для надежного декодирования кодового слова индикатора комбинации транспортных форматов (TFCI). Более низкий уровень мощности передачи может привести к меньшей надежности для индикатора комбинации транспортных форматов (TFCI). Было выполнено компьютерное моделирование для определения частоты появления ошибок в кадре (FER) индикатора комбинации транспортных форматов (TFCI) для случая без информации канала DCCH, которая имеет более низкие уровни мощности для кадров индикатора тишины (SID) и нулевых кадров. Для кода с четырехкратным повторением (который используется для 1 или 2 битов индикатора комбинации транспортных форматов (TFCI) при квадратурной фазовой манипуляции (QPSK)) в канале с аддитивным белым гауссовским шумом (AWGN) частота появления ошибок в кадре (FER) составляет приблизительно 0,5% для кадров с данными со скоростью 12 кбит/с, приблизительно 12% для кадров идентификатора тишины (SID) и приблизительно 27% для нулевых кадров. Частоты появления ошибок в кадре (FER) даже выше для биортогонального кода (16, 5) и кода Рида-Мюллера (32, 20). Высокие частоты появления ошибок в кадре (FER) индикатора комбинации транспортных форматов (TFCI) для кадров индикатора тишины (SID) и нулевых кадров будут неблагоприятно воздействовать на эффективность передачи данных.
Надежность индикатора комбинации транспортных форматов (TFCI) может быть улучшена по-разному. Ниже описываются несколько вариантов воплощения улучшения надежности индикатора комбинации транспортных форматов (TFCI).
Фиг.5A показывает передачу кодового слова индикатора комбинации транспортных форматов (TFCI) без повторения. Кадр данных может быть отправлен в четырех временных интервалах четырех подкадров в интервале времени передачи (TTI). Кодовое слово индикатора комбинации транспортных форматов (TFCI) делится на четыре части, которые вставляются в первые два временных интервала. Последние два временных интервала не включают в себя информацию индикатора комбинации транспортных форматов (TFCI).
Фиг.5B показывает передачу кодового слова индикатора комбинации транспортных форматов (TFCI) с двукратным повторением. В варианте воплощения кодовое слово индикатора комбинации транспортных форматов (TFCI) повторяется дважды, первая копия кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется в первых двух временных интервалах, и вторая копия кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется в последних двух временных интервалах. В другом варианте воплощения (не показан на фиг.5B) половина кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется в первых двух временных интервалах, и другая половина кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется в последних двух временных интервалах. Отправка кодового слова индикатора комбинации транспортных форматов (TFCI) по четырем временным интервалам может обеспечить большее разнесение во времени.
В еще одном варианте воплощения первая и вторая копии кодового слова индикатора комбинации транспортных форматов (TFCI) отправляются в первых двух временных интервалах. Первая копия кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется с использованием первого кода Уолша, и вторая копия кодового слова индикатора комбинации транспортных форматов (TFCI) отправляется с использованием второго кода Уолша. Этот вариант воплощения позволяет приемнику быстрее декодировать кодовое слово индикатора комбинации транспортных форматов (TFCI).
Фиг.5C показывает передачу кодового слова индикатора комбинации транспортных форматов (TFCI) с четырехкратным повторением. В варианте воплощения кодовое слово индикатора комбинации транспортных форматов (TFCI) повторяется четыре раза, первая и вторая копии кодового слова индикатора комбинации транспортных форматов (TFCI) отправляются в первых двух временных интервалах с использованием двух кодов Уолша, и третья и четвертая копии кодового слова индикатора комбинации транспортных форматов (TFCI) отправляются в последних двух временных интервалах с использованием двух кодов Уолша.
В еще одном варианте воплощения кодовое слово индикатора комбинации транспортных форматов (TFCI) отправляется с достаточной мощностью передачи для надежного приема. В зависимости от скорости передачи данных в заданном временном интервале мощность передачи, используемая для символов индикатора комбинации транспортных форматов (TFCI), может быть равной или выше мощности передачи, используемой для символов данных.
Можно показать, что каждое удвоение коэффициента повторения индикатора комбинации транспортных форматов (TFCI) приводит к улучшению приблизительно на 3 дБ для индикатора комбинации транспортных форматов (TFCI). Например, отношение сигнала к шуму и помехе (SINR), составляющее приблизительно 1,3 дБ, может требоваться для достижения частоты появления ошибок в кадре (FER), равной 1%, для индикатора комбинации транспортных форматов (TFCI) с биортогональным кодом в канале с аддитивным белым гауссовским шумом (AWGN). Требуемое отношение сигнала к шуму и помехе (SINR) может быть уменьшено приблизительно до -1,7 дБ посредством двукратной отправки кодового слова индикатора комбинации транспортных форматов (TFCI) и приблизительно до -4,7 дБ при четырехкратной отправке кодового слова индикатора комбинации транспортных форматов (TFCI).
В варианте воплощения кодовое слово индикатора комбинации транспортных форматов (TFCI) передается с улучшенной надежностью только при необходимости. Смещения мощности могут быть определены для всех поддерживаемых скоростей передачи данных. Улучшенная надежность (например, двукратное или четырехкратное повторение) может использоваться для индикатора комбинации транспортных форматов (TFCI) для некоторых скоростей передачи данных на основе их смещений мощности. Например, улучшенная надежность может быть применена только к нулевым кадрам, имеющим наибольшее смещение мощности и наименьший уровень мощности передачи. Улучшенная надежность также может быть применена к кадрам индикатора тишины (SID) и/или кадрам с другими скоростями передачи данных. В другом варианте воплощения улучшенная надежность применяется к индикатору комбинации транспортных форматов (TFCI) для всех поддерживаемых скоростей передачи данных.
Фиг.6 показывает вариант воплощения процесса 600 для отправки служебных сигналов, например, индикатора комбинации транспортных форматов (TFCI). Кадр данных принимают для передачи и определяют скорость передачи данных кадра данных (этап 612). Затем определяют, применима ли улучшенная надежность для служебных сигналов (например, кодового слова индикатора комбинации транспортных форматов (TFCI)) для кадра данных (этап 614). Например, улучшенная надежность может быть применима, если скорость передачи данных кадра данных ниже некоторой скорости. Если улучшенная надежность применима, как определяют на этапе 616, то сообщение отправляют с улучшенной надежностью (этап 618). Это может повлечь за собой копирование служебных сигналов и отправку нескольких копий служебных сигналов. Если улучшенная надежность не применима, то сообщение отправляют обычным образом (этап 620).
Приемник получает все отправленные копии кодового слова индикатора комбинации транспортных форматов (TFCI) для кадра данных. Приемник может объединить все копии индикаторов комбинации транспортных форматов (TFCI) для получения объединенного индикатора комбинации транспортных форматов (TFCI) для кадра данных. В одном варианте воплощения приемник выполняет простое усреднение и суммирует копии индикаторов комбинации транспортных форматов (TFCI) посимвольно. В другом варианте воплощения приемник выполняет объединение с максимальным отношением (MRC), взвешивает символы для каждой копии индикатора комбинации транспортных форматов (TFCI) на основе отношения принятого сигнала к шуму и помехе (SINR) этой копии индикатора комбинации транспортных форматов (TFCI) и суммирует взвешенные символы для всех копий индикаторов комбинации транспортных форматов (TFCI) посимвольно. Объединение с максимальным отношением (MRC) дает больший вес копиям индикаторов комбинации транспортных форматов (TFCI) с более высокими отношениями принятого сигнала к шуму и помехе (SINR), что может улучшить качество объединенного индикатора комбинации транспортных форматов (TFCI).
Описанные выше варианты воплощения улучшают надежность индикатора комбинации транспортных форматов (TFCI), когда данные отправляются с переменным уровнем мощности передачи, например, вследствие изменений активности речи во время голосового вызова. Компьютерное моделирование указывает, что четырехкратное копирование кодового слова индикатора комбинации транспортных форматов (TFCI) может уменьшить частоту появления ошибок в кадре (FER) индикатора комбинации транспортных форматов (TFCI) приблизительно до 1% или лучше для большинства моделей канала для кадров индикатора тишины (SID) и кадров с более высокими скоростями. Однако даже четырехкратное копирование кодового слова индикатора комбинации транспортных форматов (TFCI) не может достичь желаемой надежности для кодового слова индикатора комбинации транспортных форматов (TFCI) при отправке в нулевом кадре, который передается на очень низком уровне мощности. Для нулевых кадров, а также других кадров эффективность индикатора комбинации транспортных форматов (TFCI) может быть улучшена с использованием методики, описанной ниже.
В варианте воплощения надежность индикатора комбинации транспортных форматов (TFCI) определяется на основе отношения принятого сигнала к шуму и помехе (SINR) кадра данных. Кадр данных может быть отправлен в нескольких временных интервалах. Отношение принятого сигнала к шуму и помехе (SINR) может быть определено для каждого временного интервала, например, на основе контрольной последовательности и/или части данных во временном интервале. Отношения принятого сигнала к шуму и помехе (SINR) для всех временных интервалов могут быть объединены для получения отношения принятого сигнала к шуму и помехе (SINR) для кадра данных. В варианте воплощения отношения принятого сигнала к шуму и помехе (SINR) для всех временных интервалов усредняются для получения отношения принятого сигнала к шуму и помехе (SINR) для кадра данных. В другом варианте воплощения отношение принятого сигнала к шуму и помехе (SINR) для кадра данных устанавливается на 3 дБ (или 6 дБ) выше, чем самое низкое отношение принятого сигнала к шуму и помехе (SINR) среди всех временных интервалов для двукратного (или четырехкратного) повторения индикатора комбинации транспортных форматов информации (TFCI).
Принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) может считаться надежным, если вероятность ошибочного декодирования кодового слова индикатора комбинации транспортных форматов (TFCI) меньше целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI). Принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) может быть декодировано обычным образом, если определено, что оно является надежным. Если принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) определено как ненадежное, могут быть выполнены другие действия, такие как слепое декодирование. При слепом декодировании приемник может декодировать принятый кадр на основе различных гипотез о скорости передачи данных, пока кадр не будет правильно декодирован.
В варианте воплощения надежность принятого кодового слова индикатора комбинации транспортных форматов (TFCI) определяется посредством сравнения отношения принятого сигнала к шуму и помехе (SINR) кадра данных с порогом отношения сигнала к шуму и помехе (SINR) следующим образом:

 Уравнение (1)
Уравнение (1)
В уравнении (1) принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) считается надежным, если отношение принятого сигнала к шуму и помехе (SINR) превышает порог отношения сигнала к шуму и помехе (SINR), и считается ненадежным в ином случае. Порог отношения сигнала к шуму и помехе (SINR) может быть выбран таким образом, что если принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) считают надежным, вероятность ошибочного декодирования кодового слова индикатора комбинации транспортных форматов (TFCI) является меньше целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI). Порог отношения сигнала к шуму и помехе (SINR) может быть определен несколькими способами.
В варианте воплощения порог отношения сигнала к шуму и помехе (SINR) определяется на основе целевого отношения сигнала к шуму и помехе (SINR) и смещения отношения сигнала к шуму и помехе (SINR). Целевое отношение сигнала к шуму и помехе (SINR) может быть откорректировано посредством цикла регулирования мощности для достижения желаемого уровня эффективности, например, частоты появления ошибок в кадре (FER), равной 1%, для кадров данных. Передатчик может корректировать мощность передачи кадров данных таким образом, чтобы отношение принятого сигнала к шуму и помехе (SINR) было около целевого отношения сигнала к шуму и помехе (SINR), как описано ниже. Смещение отношения сигнала к шуму и помехе (SINR) может быть определено на основе принятых кадров.
Фиг.7 показывает взаимосвязь между порогом отношения сигнала к шуму и помехе (SINR), целевым отношением сигнала к шуму и помехе (SINR) и смещением отношения сигнала к шуму и помехе (SINR). График 710 показывает зависимость плотности распределения вероятности (PDF) от отношения принятого сигнала к шуму и помехе (SINR) для нулевых кадров. График 712 показывает зависимость плотности распределения вероятности (PDF) от отношения принятого сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID). Хотя это не показано на фиг.7, зависимость плотности распределения вероятности (PDF) от отношения принятого сигнала к шуму и помехе (SINR) для кадров данных с более высокой скоростью расположена справа от графика 712.
Вертикальная линия 714 указывает целевое отношение сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID). Передатчик может корректировать мощность передачи кадров индикатора тишины (SID) таким образом, чтобы отношения принятого сигнала к шуму и помехе (SINR) половины кадров индикатора тишины (SID) были ниже целевого отношения сигнала к шуму и помехе (SINR), и отношения принятого сигнала к шуму и помехе (SINR) оставшихся кадров индикатора тишины (SID) были выше целевого отношения сигнала к шуму и помехе (SINR). Для различных скоростей передачи данных могут использоваться различные целевые отношения сигнала к шуму и помехе (SINR). Эти целевые отношения сигнала к шуму и помехе (SINR) могут разделяться посредством эффективностей кодирования, достигаемых для различных скоростей передачи данных.
В варианте воплощения, показанном на фиг.7, вертикальная линия 716 указывает порог отношения сигнала к шуму и помехе (SINR) и располагается между центром плотности распределения вероятности (PDF) для кадров индикатора тишины (SID) и центром плотности распределения вероятности (PDF) для нулевых кадров. Принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) может считаться надежным, если отношение принятого сигнала к шуму и помехе (SINR) превышает порог отношения сигнала к шуму и помехе (SINR). Это надежное кодовое слово индикатора комбинации транспортных форматов (TFCI) может принадлежать кадру индикатора тишины (SID), кадру данных с более высокой скоростью или даже нулевому кадру. Принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) может считаться ненадежным, если отношение принятого сигнала к шуму и помехе (SINR) ниже порога отношения сигнала к шуму и помехе (SINR). Это ненадежное кодовое слово индикатора комбинации транспортных форматов (TFCI) считается принадлежащим нулевому кадру. В этом варианте воплощения определение того, является ли заданное принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) надежным, эквивалентно определению того, является ли заданный принятый кадр нулевым кадром.
Порог отношения сигнала к шуму и помехе (SINR) может быть определен для достижения целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI). Эта целевая частота появления ошибок в кадре (FER) определяется посредством (1) частоты появления ошибок в кадре (FER) для принятых кодовых слов индикатора комбинации транспортных форматов (TFCI), считающихся надежными, которая также называется условной частотой появления ошибок в кадре (FER), и (2) вероятности принятия кадров индикатора тишины (SID) за нулевые кадры, которая является процентным отношением кадров индикатора тишины (SID) с отношениями принятого сигнала к шуму и помехе (SINR) ниже порога отношения сигнала к шуму и помехе (SINR) и считающихся нулевыми кадрами. Вероятность принятия кадров индикатора тишины (SID) за нулевые кадры обозначается областью 718 с диагональной штриховкой под графиком 712 и слева от линии 716. Чтобы гарантировать, что долгосрочная частота появления ошибок в кадре (FER) может достичь целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI), порог отношения сигнала к шуму и помехе (SINR) может быть определен таким образом, чтобы и условная частота появления ошибок в кадре (FER), и вероятность принятия кадров индикатора тишины (SID) за нулевые кадры были ниже целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI).
В варианте воплощения, показанном на фиг.7, смещение отношения сигнала к шуму и помехе (SINR) представляет собой разность между целевым отношением сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID) и порогом отношения сигнала к шуму и помехе (SINR). Смещение отношения сигнала к шуму и помехе (SINR) может быть определено несколькими способами.
В первом варианте воплощения, который называется фиксированным смещением отношения сигнала к шуму и помехе (SINR), смещение отношения сигнала к шуму и помехе (SINR) определяется на основе дисперсии отношений принятого сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID). Если плотность распределения вероятности (PDF) для кадров индикатора тишины (SID) является известным распределением (например, гауссовым распределением), то точка, в которой интегральная функция распределения (CDF) равна целевой вероятности принятия кадров индикатора тишины (SID) за нулевые кадры, может быть определена на основе дисперсии отношения сигнала к шуму и помехе (SINR). Смещение отношения сигнала к шуму и помехе (SINR) может быть определено следующим образом:
Смещение SINR=K×σSID, Уравнение (2)
Уравнение (2)
где σ2 SID - дисперсия отношения сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID), и
K - масштабный коэффициент, определенный посредством целевой вероятности принятия кадров индикатора тишины (SID) за нулевые кадры.
Если вероятность кадров индикатора тишины (SID) составляет 7%, и целевая вероятность принятия кадров индикатора тишины (SID) за нулевые кадры составляет 1%, то коэффициент К может быть установлен равным -1,4 для гауссова распределения отношений принятого сигнала к шуму и помехе (SINR).
В варианте воплощения дисперсия σ2 SID отношения сигнала к шуму и помехе (SINR) индикатора тишины (SID) определяется на основе отношения принятого сигнала к шуму и помехе (SINR) кадров индикатора тишины (SID). Кадры индикатора тишины (SID) могут быть идентифицированы после декодирования принятых кодовых слов индикатора комбинации транспортных форматов (TFCI). Отношения принятого сигнала к шуму и помехе (SINR) этих кадров индикатора тишины (SID) могут использоваться для получения дисперсии отношения сигнала к шуму и помехе (SINR). В другом варианте воплощения дисперсия отношения сигнала к шуму и помехе (SINR) индикатора тишины (SID) определяется на основе отношений принятого сигнала к шуму и помехе (SINR) нулевых кадров. С помощью компьютерного моделирования замечено, что дисперсия отношения сигнала к шуму и помехе (SINR) нулевых кадров аналогична дисперсии отношения сигнала к шуму и помехе (SINR) кадров индикатора тишины (SID). Нулевые кадры могут отправляться гораздо чаще кадров индикатора тишины (SID), например голосовой вызов может отправлять приблизительно 60% нулевых кадров и приблизительно 7% кадров индикатора тишины (SID). Таким образом больше измерений отношения сигнала к шуму и помехе (SINR) для нулевых кадров может быть доступно и использовано для получения более точной оценки дисперсии отношения сигнала к шуму и помехе (SINR). Двусторонняя оценка дисперсии отношения сигнала к шуму и помехе (SINR) может быть получена на основе отношений принятого сигнала к шуму и помехе (SINR) всех безошибочных нулевых кадров. В качестве альтернативы может быть получена односторонняя оценка (слева) дисперсии отношения сигнала к шуму и помехе (SINR) на основе отношений принятого сигнала к шуму и помехе (SINR), которые меньше среднего отношения сигнала к шуму и помехе (SINR) для нулевых кадров. Односторонняя оценка избегает использования отношений принятого сигнала к шуму и помехе (SINR) с правой стороны плотности распределения вероятности (PDF) для нулевых кадров, которые могут быть испорчены ошибками. В еще одном варианте воплощения дисперсии отношения сигнала к шуму и помехе (SINR) определяются для различных скоростей передачи данных и усредняются для получения дисперсии отношения сигнала к шуму и помехе (SINR) для кадров индикатора тишины (SID). В общем случае дисперсия отношения сигнала к шуму и помехе (SINR) индикатора тишины (SID) может быть определена на основе кадров индикатора тишины (SID) и/или других кадров.
Во втором варианте воплощения, который называется адаптивным смещением отношения сигнала к шуму и помехе (SINR), смещение отношения сигнала к шуму и помехе (SINR) определяется на основе измеренной вероятности принятия кадров индикатора тишины (SID) за нулевые кадры. В этом варианте воплощения ненадежные кадры первоначально идентифицируются как принятые кадры, считающиеся нулевыми кадрами, поскольку их отношения принятого сигнала к шуму и помехе (SINR) ниже порога отношения сигнала к шуму и помехе (SINR). Ненадежные кадры декодируются для определения, являются ли они действительно нулевыми кадрами. Вероятность PSN принятия кадров индикатора тишины (SID) за нулевые кадры может быть выявлена посредством подсчета количества K ненадежных кадров, не декодированных как нулевые кадры в пределах окна из L ненадежных кадров, или PSN=K/L, где L может быть равно 200 или некоторому другому значению. Смещение отношения сигнала к шуму и помехе (SINR) может быть увеличено на шаг OSUP, если PSN превышает высокое значение PH, например PH=0,02 и OSUP=0,5 дБ. Высокое значение PSN может быть вследствие слишком большого количества кадров индикатора тишины (SID), объявленных как нулевые кадры из-за низкого смещения отношения сигнала к шуму и помехе (SINR). Увеличение смещения отношения сигнала к шуму и помехе (SINR) на OSUP тогда уменьшит такие ошибочные события. Наоборот, смещение отношения сигнала к шуму и помехе (SINR) может быть уменьшено на шаг OSDN, если PSN падает ниже низкого значения PL, например PL=0,005 и OSDN=0,5 дБ. Низкое значение PSN может быть вследствие малого количества кадров индикатора тишины (SID), объявленных как нулевые кадры из-за большого смещения отношения сигнала к шуму и помехе (SINR). Уменьшение смещения отношения сигнала к шуму и помехе (SINR) на OSDN тогда заставит объявить больше кадров индикатора тишины (SID) как нулевые кадры. Для PL, PH, OSUP и OSDN также могут использоваться другие значения. После каждой корректировки смещения отношения сигнала к шуму и помехе (SINR) может быть применен период ожидания (например, 250 ненадежных кадров), во время которого смещение отношения сигнала к шуму и помехе (SINR) не изменяется. Это период ожидания может предотвратить переключение смещения отношения сигнала к шуму и помехе (SINR).
Смещение отношения сигнала к шуму и помехе (SINR) может быть ограничено в пределах предопределенного диапазона для предотвращения корректировки с завышением или занижением. Предопределенный диапазон может быть определен посредством компьютерного моделирования, эмпирических измерений и т.д. и может зависеть от модели канала. Предопределенный диапазон может составлять от -4 до -8 дБ или представлять собой какой-либо другой диапазон.
Второй вариант воплощения может быть использован для различных моделей канала и может адаптироваться к различным условиям канала. Второй вариант воплощения не требует оценки дисперсии отношения сигнала к шуму и помехе (SINR) и может быть использован, если дисперсия отношения сигнала к шуму и помехе (SINR) не доступна или является слишком шумной. Второй вариант воплощения может быть использован для корректировки смещения отношения сигнала к шуму и помехе (SINR), как описано выше, или корректировки порога отношения сигнала к шуму и помехе (SINR) непосредственно.
Для обоих вариантов воплощения порог отношения сигнала к шуму и помехе (SINR) может быть установлен следующим образом:
Порог SINR=Целевое SINR-Смещение SINR.
 Уравнение (3)
Уравнение (3)
Целевое отношение сигнала к шуму и помехе (SINR) корректируется посредством цикла регулировки мощности для достижения целевой частоты появления ошибок в кадре (FER) для кадров данных. Так как мощность передачи корректируется на основе целевого отношения сигнала к шуму и помехе (SINR), распределение отношений принятого сигнала к шуму и помехе (SINR) также меняется в зависимости от целевого отношения сигнала к шуму и помехе (SINR). Так как порог отношения сигнала к шуму и помехе (SINR) корректируется вместе с целевым отношением сигнала к шуму и помехе (SINR), частота появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI) будет сопровождать целевую частоту появления ошибок в кадре (FER) для кадров данных.
Компьютерное моделирование было выполнено для первого варианта воплощения, в котором смещение отношения сигнала к шуму и помехе (SINR) определяется на основе дисперсии отношения сигнала к шуму и помехе (SINR). Компьютерное моделирование указывает, что частота появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI) может быть существенно уменьшена для различных моделей канала, например, приблизительно от 20% до менее чем 1% для некоторых моделей канала.
Фиг.8 показывает механизм 800 регулировки мощности, который корректирует мощность передачи данных с передатчика на приемник. Механизм 800 регулировки мощности включает в себя внутренний цикл 802 и внешний цикл 804.
Внутренний цикл 802 пытается поддерживать отношение принятого сигнала к шуму и помехе (SINR) для передачи данных насколько возможно близко к целевому отношению сигнала к шуму и помехе (SINR). В каждом распределенном временном интервале блок 812 оценки отношения сигнала к шуму и помехе (SINR) оценивает отношение принятого сигнала к шуму и помехе (SINR) передачи данных и выдает отношение принятого сигнала к шуму и помехе (SINR) генератору 814 информации управления мощностью передачи (TPC). Генератор 814 информации управления мощностью передачи (TPC) также принимает целевое отношение сигнала к шуму и помехе (SINR) от блока 820 корректировки, сравнивает отношение принятого сигнала к шуму и помехе (SINR) с целевым отношением сигнала к шуму и помехе (SINR) и формирует символ информации управления мощностью передачи (TPC) на основе результата сравнения. Символ информации управления мощностью передачи (TPC) отправляют через линию 830 связи на передатчик. Передатчик обрабатывает передачу обратной связи от приемника и получает принятый символ информации управления мощностью передачи (TPC) в каждом распределенном временном интервале. Датчик 832 информации управления мощностью передачи (TPC) обнаруживает каждый принятый символ информации управления мощностью передачи (TPC) и выдает решение относительно информации управления мощностью передачи (TPC), которое указывает, были ли обнаружены команда увеличения (Up) или команда понижения (Down). Затем блок 834 передатчика корректирует мощность передачи данных на основе решения относительно информации управления мощностью передачи (TPC).
Вследствие потерь на пути распространения и затухания в линии 840 связи, которые обычно изменяются в течение времени и особенно для мобильного передатчика и/или приемника, отношение принятого сигнала к шуму и помехе (SINR) в приемнике постоянно колеблется. Внутренний цикл 802 пытается поддерживать отношение принятого сигнала к шуму и помехе (SINR) около целевого отношения сигнала к шуму и помехе (SINR) в присутствии изменений в линии 840 связи.
Внешний цикл 804 непрерывно корректирует целевое отношение сигнала к шуму и помехе (SINR) таким образом, чтобы достигалась целевая частота появления ошибок в кадре (FER) для передачи данных. Процессор 836 передатчика (TX) принимает и обрабатывает кадры данных для передачи через линию 840 связи. Процессор 836 передатчика (TX) также отправляет кодовое слово индикатора комбинации транспортных форматов (TFCI) с каждым кадром данных. Датчик 816 надежности индикатора комбинации транспортных форматов (TFCI) определяет надежность кодового слова индикатора комбинации транспортных форматов (TFCI) для каждого принятого кадра, как описано ниже. Процессор 818 приемника (RX) обрабатывает передачу данных и декодирует принятые кадры. Кроме того, процессор 818 приемника (RX) проверяет каждый декодированный кадр, определяет, был ли кадр декодирован правильно (хороший кадр) или ошибочно (стертый кадр), и выдает состояние каждого декодированного кадра. Блок 820 корректировки принимает состояние кадра и целевую частоту появления ошибок в кадре (FER) и определяет целевое отношение сигнала к шуму и помехе (SINR). Блок 820 корректировки может уменьшить целевое отношение сигнала к шуму и помехе (SINR) на шаг ΔDN для каждого правильно декодированного кадра (или хорошего кадра) и увеличить целевое отношение сигнала к шуму и помехе (SINR) на шаг ΔUP для каждого ошибочно декодированного кадра (или стертого кадра). Шаги ΔUP и ΔDN могут быть выбраны на основе целевой частоты появления ошибок в кадре (FER) и желаемой скорости сходимости для внешнего цикла.
Фиг.9 показывает вариант воплощения датчика 816 надежности индикатора комбинации транспортных форматов (TFCI), показанного на фиг.8. Для ясности ниже описывается обработка для одного принятого кадра. В датчике 816 блок 912 вычисления дисперсии отношения сигнала к шуму и помехе (SINR) получает отношение принятого сигнала к шуму и помехе (SINR), а также скорость передачи данных принятого кадра. Блок 912 может сохранить отношение принятого сигнала к шуму и помехе (SINR), пока не будет определена скорость передачи данных принятого кадра. Тогда блок 912 может обновить дисперсию отношения сигнала к шуму и помехе (SINR) с помощью отношения принятого сигнала к шуму и помехе (SINR), если принятый кадр имеет рассматриваемую скорость передачи данных, например скорость нулевого кадра. Блок 914 вычисления смещения отношения сигнала к шуму и помехе (SINR) принимает дисперсию отношения сигнала к шуму и помехе (SINR) от блока 912 и, возможно, целевую частоту появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI). Блок 914 вычисляет смещение отношения сигнала к шуму и помехе (SINR), например, как показано в уравнении (2), где масштабный коэффициент K зависит от целевой частоты появления ошибок в кадре (FER) для индикатора комбинации транспортных форматов (TFCI). Блок 916 вычисления порога отношения сигнала к шуму и помехе (SINR) принимает целевое отношение сигнала к шуму и помехе (SINR) и смещение отношения сигнала к шуму и помехе (SINR) и вычисляет порог отношения сигнала к шуму и помехе (SINR), например, как показано в уравнении (3). Датчик 918 надежности получает отношение принятого сигнала к шуму и помехе (SINR) и порог отношения сигнала к шуму и помехе (SINR), сравнивает отношение принятого сигнала к шуму и помехе (SINR) с порогом отношения сигнала к шуму и помехе (SINR) и объявляет принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) либо как надежное, либо как ненадежное на основе результата сравнения, например, как показано в уравнении (1). Датчик 918 выдает индикатор надежности индикатора комбинации транспортных форматов (TFCI). Если принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) считается надежным, то процессор 818 приемника (RX) декодирует принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) и затем декодирует принятый кадр в соответствии с декодированным индикатором комбинации транспортных форматов (TFCI). Если принятое кодовое слово индикатора комбинации транспортных форматов (TFCI) считается ненадежным, то процессор 818 приемника (RX) может объявить принятый кадр как нулевой кадр или может выполнить слепое обнаружение и декодировать принятый кадр в соответствии с каждой возможной скоростью передачи данных, пока кадр не будет декодирован правильно или пока не будут испробованы все скорости передачи данных. Процессор 818 приемника (RX) выдает декодированный кадр, состояние кадра (которое может быть использовано для обновления целевого отношения сигнала к шуму и помехе (SINR)) и скорость передачи кадра (которая может быть использована для обновления дисперсии отношения сигнала к шуму и помехе (SINR)).
Фиг.10 показывает вариант воплощения процесса 1000 для обработки данных в приемнике. Принимают кадр, составленный из кодированных данных и служебных сигналов (например, кодового слова индикатора комбинации транспортных форматов (TFCI)) (этап 1012). Определяют качество принятого сигнала (например, отношение принятого сигнала к шуму и помехе (SINR)) принятого кадра (этап 1014). На основе целевого качества принятого сигнала и смещения определяют порог (этап 1016). Целевое качество принятого сигнала может быть скорректировано для достижения целевой частоты появления ошибок в кадре (FER) для принятых кадров. Смещение может быть определено на основе любого из вариантов воплощения, описанных выше. Определяют, является ли качество принятого сигнала больше порога (этап 1018). Если ответ положительный, то служебные сигналы (например, принятое кодовое слово индикатора комбинации транспортных форматов (TFCI)) восстанавливают, например, обнаруживают и/или декодируют (этап 1020). Затем кодированные данные в принятом кадре декодируют в соответствии с восстановленными служебными сигналами (этап 1022). В ином случае, если ответ отрицательный для этапа 1018, то принятый кадр объявляют как нулевой кадр (этап 1024).
Описанные здесь методики могут использоваться для нисходящей линии связи и восходящей линии связи. Базовая станция может выполнять процесс 600, показанный на фиг.6, для отправки служебных сигналов (например, индикатора комбинации транспортных форматов (TFCI)) по нисходящей линии связи и может выполнять процесс 1000, показанный на фиг.10, для приема служебных сигналов по восходящей линии связи. Терминал может выполнять процесс 600, показанный на фиг.6, для отправки служебных сигналов по восходящей линии связи и может выполнять процесс 1000, показанный на фиг.10, для приема служебных сигналов по нисходящей линии связи. Методики также могут быть использованы для различных типов служебных сигналов, таких как индикатор комбинации транспортных форматов (TFCI), индикатор качества канала (CQI), информация о скорости передачи, управляющие служебные сигналы уровня 1 (L1) и уровня 2 (L2) и т.д.
Фиг.11 показывает блок-схему базовой станции 110 и терминала 120, которые являются одной из базовых станций и одним из терминалов, показанных на фиг.1. В базовой станции 110 процессор 1110 передатчика (TX) принимает кадры данных (например, для канала DTCH) и управляющие кадры (например, для канала DCCH), обрабатывает (например, кодирует и подвергает чередованию) каждый кадр и выдает кодированные данные. Модулятор 1112 обрабатывает кодированные данные для формирования символов данных, обрабатывает служебные сигналы и информацию уровня 1 (например, индикатор комбинации транспортных форматов (TFCI), информацию управления мощностью передачи (TPC) и сдвиг синхронизации (SS)) для формирования символов служебных сигналов и выдает пакеты данных и символы служебных сигналов. Для технологии UTRA TDD обработка посредством модулятора 1112 может включать в себя расширение символов данных и служебных сигналов с помощью одного или более кодов Уолша и скремблирование расширенных символов с помощью кода скремблирования. Затем передатчик (TMTR) 1114 обрабатывает пакеты для формирования сигнала нисходящей линии связи, который передается от антенны 1116 на терминалы.
В терминале 120 антенна 1152 принимает сигнал нисходящей линии связи от базовой станции 110 и выдает принятый сигнал на приемник (RCVR) 1154. Приемник 1154 модифицирует и переводит принятый сигнал в цифровую форму и выдает отсчеты. Затем демодулятор 1156 обрабатывает (например, дескремблирует и сужает) отсчеты для получения принятых символов. Процессор 1158 приемника (RX) декодирует принятые символы для каждого кадра данных, отправленного в терминал 120, и выдает декодированные данные. Затем процессор 1158 приемника (RX) выдает состояние каждого декодированного кадра (например, хороший или стертый) контроллеру 1170.
Обработка для передачи по восходящей линии связи может быть аналогичной обработке для передачи по нисходящей линии связи. Обработка для нисходящей линии связи и для восходящей линии связи для технологии UTRA TDD описывается в документах 3GPP TS 25.221 и TS 25.222. Контроллеры 1130 и 1170 управляют операциями в базовой станции 110 и терминале 120 соответственно. Блоки памяти 1132 и 1172 сохраняют данные и программные коды для базовой станции 110 и терминала 120 соответственно.
Для передачи служебных сигналов контроллер 1130 и/или 1170 может выполнить процесс 600, показанный на фиг.6, и определить, следует ли отправить служебные сигналы с улучшенной надежностью. Для обнаружения служебных сигналов нисходящей линии связи блок 1174 оценки отношения сигнала к шуму и помехе (SINR) в терминале 120 может оценить отношение принятого сигнала к шуму и помехе (SINR) каждого принятого кадра. Контроллер 1170 в терминале 120 может осуществить процесс 1000, показанный на фиг.10, и/или другие процессы для обнаружения служебных сигналов (например, информации TFCI), принятых от базовой станции 110. Для обнаружения служебных сигналов восходящей линии связи блок 1134 оценки отношения сигнала к шуму и помехе (SINR) в базовой станции 110 может оценить отношение принятого сигнала к шуму и помехе (SINR) каждого принятого кадра. Контроллер 1130 в базовой станции 110 может осуществить процесс 1000, показанный на фиг.10, и/или другие процессы для обнаружения служебных сигналов (например, индикатора комбинации транспортных форматов информации (TFCI)), принятых от терминала 120.
Специалисты в области техники поймут, что информация и сигналы могут быть представлены с использованием любых из разнообразных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут упоминаться в изложенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Специалисты в области техники также поймут, что различные иллюстративные логические блоки, модули, схемы и шаги алгоритмов, описанные в связи с раскрытыми здесь вариантами воплощения, могут быть реализованы как электронные аппаратные средства, программное обеспечение или их комбинации. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и шаги были описаны выше в общем виде в терминах их функциональных возможностей. Реализованы ли такие функциональные возможности как аппаратные средства или программное обеспечение, зависит от конкретного применения и проектных ограничений, наложенных на всю систему. Квалифицированные специалисты могут реализовать описанные функциональные возможности различными способами для каждого конкретного применения, но такие решения реализации не должны интерпретироваться как вызывающие отход от объема данного изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми здесь вариантами воплощения, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы, программируемой вентильной матрицы (FPGA) или другого программируемого логического устройства, схемы на дискретных компонентах или транзисторной логической схемы, отдельных компонентов аппаратных средств или любой их комбинации, выполненной с возможностью выполнять описанные здесь функции. Процессором общего назначения может являться микропроцессор, но альтернативно процессором может являться любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как комбинация вычислительных устройств, например комбинация процессора цифровых сигналов (DSP) и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром процессора цифровых сигналов (DSP) или любая другая такая конфигурация.
Этапы способа или алгоритма, описанные в связи с раскрытыми здесь вариантами воплощения, могут быть воплощены непосредственно в аппаратных средствах, в программном модуле, исполняемом посредством процессора, или в их комбинации. Программный модуль может постоянно находиться в оперативном запоминающем устройстве (ОЗУ), флэш-памяти, постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ), электрически стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ), регистрах, жестком диске, съемном диске, компакт-диске, предназначенном только для чтения (CD-ROM), или любом другом носителе данных, известном в области техники. Иллюстративный носитель данных соединен с процессором так, что процессор может считывать информацию с носителя данных и записывать информацию на него. Альтернативно носитель данных может являться неотъемлемой частью процессора. Процессор и носитель данных могут постоянно находиться в специализированной интегральной схеме (ASIC). Специализированная интегральная схема может постоянно находиться в пользовательском терминале. Альтернативно процессор и носитель данных могут постоянно находиться в пользовательском терминале как отдельные компоненты.
Предшествующее описание раскрытых вариантов воплощения дано для того, чтобы дать возможность любому специалисту в области техники осуществить или использовать настоящее изобретение. Различные модификации этих вариантов воплощения могут быть очевидны специалистам в области техники, и определенные здесь общие принципы могут быть применены к другим вариантам воплощения без отступления от сущности или объема изобретения. Таким образом, настоящее изобретение не подразумевается ограниченным показанными здесь вариантами воплощения, а должно получить самый широкий объем, совместимый с раскрытыми здесь принципами и новыми признаками.



Изобретение относится к связи. Описываются методики для улучшения надежности передачи служебных сигналов. Передатчик определяет, применима ли улучшенная надежность для служебных сигналов для кадра данных. Передатчик отправляет служебные сигналы без улучшенной надежности, если она считается не применимой, и с улучшенной надежностью, если она считается применимой. Приемник принимает служебные сигналы и объявляет служебные сигналы как надежные или ненадежные на основе качества принятого сигнала принятого кадра и порога. Приемник восстанавливает служебные сигналы, если они считаются надежными, и декодирует принятый кадр в соответствии с восстановленными служебными сигналами. Приемник объявляет принятый кадр как нулевой кадр или выполняет некоторое другое действие, если служебный сигнал считается ненадежным. Техническим результатом является достижение надежной передачи служебных сигналов. 7 н. и 30 з.п. ф-лы, 1 табл., 13 ил.
1. Устройство для приема служебных сигналов в беспроводной связи, содержащее:
по меньшей мере один процессор для приема кадра, содержащего кодированные данные и служебные сигналы с улучшенной надежностью раздельно от надежности кодированных данных, для определения качества принятого сигнала принятого кадра, для определения, являются ли служебные сигналы надежными, на основе качества принятого сигнала, и если служебные сигналы считаются надежными, для восстановления служебных сигналов и декодирования кодированных данных в соответствии с восстановленными служебными сигналами; и
память, соединенную по меньшей мере с одним процессором.
2. Устройство по п.1, в котором по меньшей мере один процессор объявляет принятый кадр как нулевой кадр, если служебные сигналы считаются ненадежными.
3. Устройство по п.1, в котором по меньшей мере один процессор определяет порог на основе целевого качества принятого сигнала и смещения и определяет, являются ли служебные сигналы надежными, на основе качества принятого сигнала и порога.
4. Устройство по п.3, в котором по меньшей мере один процессор корректирует целевое качество принятого сигнала на основе статуса декодирования принятого кадра.
5. Устройство по п.3, в котором по меньшей мере один процессор оценивает дисперсию качества принятого сигнала и определяет смещение на основе дисперсии качества принятого сигнала.
6. Устройство по п.5, в котором по меньшей мере один процессор оценивает дисперсию качества принятого сигнала на основе нулевых кадров.
7. Устройство по п.5, в котором по меньшей мере один процессор определяет смещение дополнительно на основе целевой частоты появления ошибок для служебных сигналов.
8. Устройство по п.3, в котором по меньшей мере один процессор определяет частоту появления ошибок обнаружения, показывающую ошибки в объявлении служебных сигналов как надежных или ненадежных, на основе качества принятого сигнала и корректирует смещение на основе частоты появления ошибок обнаружения.
9. Устройство по п.8, в котором по меньшей мере один процессор увеличивает смещение, если частота появления ошибок обнаружения превышает первое значение, и уменьшает смещение, если частота появления ошибок обнаружения уменьшается ниже второго значения.
10. Устройство по п.8, в котором по меньшей мере один процессор поддерживает смещение для конкретного количества кадров после корректировки смещения.
11. Устройство по п.1, в котором по меньшей мере один процессор принимает пакеты для принятого кадра, определяет качество принятого сигнала каждого пакета и определяет качество принятого сигнала принятого кадра на основе качества принятого сигнала пакетов.
12. Устройство по п.1, в котором по меньшей мере один процессор принимает пакеты для принятого кадра, получает кодированные данные из первого набора полей в каждом из пакетов и получает служебные сигналы из второго набора полей в каждом из пакетов.
13. Устройство по п.1, в котором служебные сигналы содержат индикатор комбинации транспортных форматов (TFCI).
14. Способ приема служебных сигналов в беспроводной связи, содержащий этапы, на которых:
принимают на приемнике кадр, содержащий кодированные данные и служебные сигналы с улучшенной надежностью раздельно от надежности кодированных данных;
определяют качество принятого сигнала принятого кадра;
определяют, являются ли служебные сигналы надежными, на основе качества принятого сигнала; и
если служебные сигналы считаются надежными,
восстанавливают служебные сигналы, и
декодируют кодированные данные в соответствии с восстановленными служебными сигналами.
15. Способ по п.14, в котором определение, являются ли служебные сигналы надежным, содержит этапы, на которых
определяют порог на основе целевого качества принятого сигнала и смещения и
определяют, являются ли служебные сигналы надежными, на основе качества принятого сигнала и порога.
16. Способ по п.15, дополнительно содержащий этапы, на которых:
оценивают дисперсию качества принятого сигнала и определяют смещение на основе дисперсии качества принятого сигнала.
17. Способ по п.15, дополнительно содержащий этапы, на которых:
определяют частоту появления ошибок обнаружения, показывающую ошибки в объявлении служебных сигналов как надежных или ненадежных, на основе качества принятого сигнала; и
корректируют смещение на основе частоты появления ошибок обнаружения.
18. Устройство для приема служебных сигналов в беспроводной связи, содержащее:
средство для приема кадра, содержащего кодированные данные и служебные сигналы с улучшенной надежностью раздельно от надежности кодированных данных;
средство для определения качества принятого сигнала принятого кадра;
средство для определения, являются ли служебные сигналы надежными, на основе качества принятого сигнала;
средство для восстановления служебных сигналов, если они считаются надежными; и
средство для декодирования кодированных данных в соответствии с восстановленными служебными сигналами, если служебные сигналы считаются надежными.
19. Устройство по п.18, в котором средство для определения, являются ли служебные сигналы надежными, содержит
средство для определения порога на основе целевого качества принятого сигнала и смещения и
средство для определения, являются ли служебные сигналы надежными, на основе качества принятого сигнала и порога.
20. Устройство по п.19, дополнительно содержащее:
средство для оценки дисперсии качества принятого сигнала и средство для определения смещения на основе дисперсии качества принятого сигнала.
21. Устройство по п.19, дополнительно содержащее:
средство для определения частоты появления ошибок обнаружения, показывающей ошибку в объявлении служебных сигналов как надежных или ненадежных, на основе качества принятого сигнала; и
средство для корректировки смещения на основе частоты появления ошибок обнаружения.
22. Читаемый с помощью процессора носитель, содержащий закодированные на нем исполняемые процессором команды, которые предписывают процессору
принимать кадр, содержащий кодированные данные и служебные сигналы с улучшенной надежностью раздельно от надежности кодированных данных;
определять качество принятого сигнала принятого кадра;
определять, являются ли служебные сигналы надежными, на основе качества принятого сигнала; и
если служебные сигналы считаются надежными,
восстанавливать служебные сигналы, и
декодировать кодированные данные в соответствии с восстановленными служебными сигналами.
23. Читаемый с помощью процессора носитель по п.22 дополнительно для хранения команд для того, чтобы:
определять порог на основе целевого качества принятого сигнала и смещения, и
определять, являются ли служебные сигналы надежными, на основе качества принятого сигнала и порога.
24. Читаемый с помощью процессора носитель по п.23
дополнительно для хранения команд для того, чтобы
оценивать дисперсию качества принятого сигнала и определять смещение на основе дисперсии качества принятого сигнала.
25. Читаемый с помощью процессора носитель по п.23 дополнительно для хранения команд для того, чтобы:
определять частоту появления ошибок обнаружения, показывающую ошибки в объявлении служебных сигналов как надежных или ненадежных, на основе качества принятого сигнала; и
корректировать смещение на основе частоты появления ошибок обнаружения.
26. Устройство для передачи служебных сигналов в беспроводной связи, содержащее:
по меньшей мере один процессор для определения, применима ли улучшенная надежность для служебных сигналов для кадра данных, содержащего кодированные данные и служебные сигналы, для отправки служебных сигналов без улучшенной надежности, если она считается не применимой, и для отправки служебных сигналов с улучшенной надежностью раздельно от надежности кодированных данных, если она считается применимой; и
память, соединенную по меньшей мере с одним процессором.
27. Устройство по п.26, в котором по меньшей мере один процессор определяет скорость передачи данных кадра данных и определяет, применима ли улучшенная надежность для служебных сигналов, на основе скорости передачи данных.
28. Устройство по п.26, в котором по меньшей мере один процессор копирует служебные сигналы для получения нескольких копий служебных сигналов и отправляет несколько копий служебных сигналов для улучшения надежности.
29. Устройство по п.26, в котором по меньшей мере один процессор копирует служебные сигналы для получения двух копий служебных сигналов и отправляет две копии служебных сигналов в нескольких временных интервалах для кадра данных.
30. Устройство по п.26, в котором по меньшей мере один процессор копирует служебные сигналы для получения четырех копий служебных сигналов и отправляет четыре копии служебных сигналов в четырех временных интервалах с использованием двух кодов Уолша.
31. Устройство по п.26, в котором по меньшей мере один процессор вставляет данные для кадра данных в первый набор полей в каждом из нескольких пакетов, вставляет служебные сигналы во второй набор полей в каждом из нескольких пакетов и отправляет символы в каждом пакете на одинаковом уровне мощности передачи, причем первый набор полей мультиплексирован с временным разделением со вторым набором полей в каждом пакете.
32. Способ передачи служебных сигналов в беспроводной связи, содержащий этапы, на которых:
определяют, применима ли улучшенная надежность для служебных сигналов для кадра данных, содержащего кодированные данные и служебные сигналы;
отправляют с помощью передатчика служебные сигналы без улучшенной надежности, если она считается не применимой; и
отправляют с помощью передатчика служебные сигналы с улучшенной надежностью раздельно от надежности кодированных данных, если она считается применимой.
33. Способ по п.32, в котором определение, применима ли улучшенная надежность для служебных сигналов, содержит этапы, на которых
определяют скорость передачи данных кадра данных, и
определяют, применима ли улучшенная надежность для служебных сигналов, на основе скорости передачи данных.
34. Способ по п.32, в котором отправка служебных сигналов с улучшенной надежностью содержит этапы, на которых
копируют служебные сигналы для получения нескольких копий служебных сигналов и
отправляют несколько копий служебных сигналов для улучшения надежности.
35. Устройство для передачи служебных сигналов в беспроводной связи, содержащее:
средство для определения, применима ли улучшенная надежность для служебных сигналов для кадра данных, содержащего кодированные данные и служебные сигналы;
средство для отправки служебных сигналов без улучшенной надежности, если она считается не применимой; и
средство для отправки служебных сигналов с улучшенной надежностью раздельно от надежности кодированных данных, если она считается применимой.
36. Устройство по п.35, в котором средство для определения, применима ли улучшенная надежность для служебных сигналов, содержит
средство для определения скорости передачи данных кадра данных и
средство для определения, применима ли улучшенная надежность для служебных сигналов, на основе скорости передачи данных.
37. Устройство по п.35, в котором средство для отправки служебных сигналов с улучшенной надежностью содержит
средство для копирования служебных сигналов для получения нескольких копий служебных сигналов и
средство для отправки нескольких копий служебных сигналов для улучшения надежности.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫБОРА ВХОДЯЩЕГО КАНАЛА В СИСТЕМЕ СВЯЗИ | 1996 |
|
RU2134489C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| EP 1480365 A, 24.11.2004. | |||

