Изобретение относится к машиностроению и касается конструкции технологического оборудования для измерения смещения оси магнитного поля кольцевого магнита относительно геометрической оси его посадочной поверхности и, в частности, может быть использовано для контроля магнитов верхней магнитной опоры высокоскоростного ротора.
Известен стенд для центровки магнитов по магнитному полю [1], в котором аналогично магнитной подвеске ротора газовой центрифуги воспроизводится взаимное расположение магнита и взаимодействующей с ним ферромагнитной втулки, расположенной соосно в верхней части трубы-ротора, имитирующего ротор газовой центрифуги. Ротор-имитатор имеет значительную массу и опорный узел в нижней части, при этом обеспечивается требуемый магнитный зазор между магнитом и ферромагнитной втулкой. Стенд оборудован системой, измеряющей отклонение геометрической оси ферромагнитной втулки от геометрической оси посадочной поверхности магнита, относительно оси магнитного поля которого и центрируется ферромагнитная втулка. Следовательно, таким образом измеряется смещение оси магнитного поля магнита относительно геометрической оси его посадочной поверхности. То есть смещение оси магнитного поля магнита измеряется по смещению геометрической оси ферромагнитной втулки.
Недостатком конструкции известного стенда-аналога [1] является наличие массивного ротора-имитатора с выступающим вниз опорным стержнем. В результате этого центр тяжести ротора-имитатора располагается значительно выше точки опоры и создает опрокидывающий момент, снижающий точность совпадения геометрической оси ферромагнитной втулки с осью магнитного поля магнита. В результате возникает погрешность в измерении смещения оси магнитного поля относительно геометрической оси посадочной поверхности магнитов.
Некоторое повышение точности совпадения геометрической оси ферромагнитной втулки с осью магнитного поля магнита имеет принятый за прототип стенд [2]. В этой конструкции центр тяжести ротора-имитатора, благодаря иному его выполнению в части опорного узла, практически совпадает с точкой опоры и находится несколько ниже ее. Однако сохраняется массивность ротора-имитатора и соответствующая инерционность в процессе его отклонения от вертикального положения, что снижает точность совпадения геометрической оси ферромагнитной втулки с осью магнитного поля магнита.
Таким образом, оптимизация геометрических форм и весовых соотношений деталей ротора-имитатора не обеспечивает необходимой точности контроля кольцевых магнитов по магнитному полю.
Кроме того, наличие массивного и дорогого в изготовлении ротора-имитатора усложняет конструкцию и увеличивает габариты и стоимость устройства.
Техническая задача, которая решается настоящим изобретением, состоит в создании устройства простой конструкции и одновременно обеспечивающего повышение точности контроля магнитов по магнитному полю. То есть решается задача полностью исключить недостаток конструкции стенда-прототипа, связанный с массивностью и инерционностью ротора-имитатора.
Технический результат от использования предлагаемой конструкции заключается в повышении точности совпадения геометрической оси ферромагнитной втулки с осью магнитного поля магнита в процессе его контроля. В результате повышается точность измерения смещения оси магнитного поля относительно геометрической оси посадочной поверхности контролируемых магнитов.
Указанный технический результат достигается тем, что в устройстве для контроля кольцевых магнитов по магнитному полю, содержащем немагнитный корпус с немагнитной крышкой, имеющей вертикальный цилиндрический выступ для установки контролируемого магнита с возможностью его вращения вокруг своей оси, оппозитно которому внутри корпуса расположена ферромагнитная втулка, и измерительную систему, фиксирующую отклонение геометрической оси ферромагнитной втулки от геометрической оси посадочной поверхности магнита при нахождении ферромагнитной втулки под воздействием магнитного поля на заданном осевом расстоянии от опорной поверхности магнита, ферромагнитная втулка в отличие от прототипа соединена с основанием корпуса гибкой связью, длина которой обеспечивает упомянутое заданное осевое расстояние. Гибкая связь может быть образована тремя равномерно расположенными по окружности гибкими нерастяжимыми нитями.
Предлагаемая конструкция устройства для контроля кольцевых магнитов по магнитному полю схематично показана на чертежах.
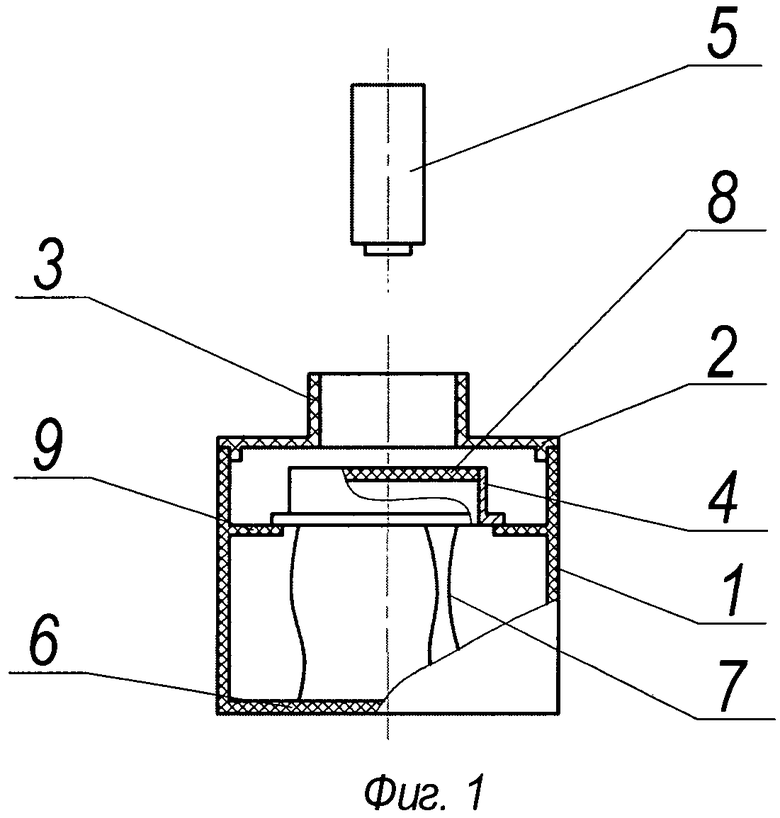
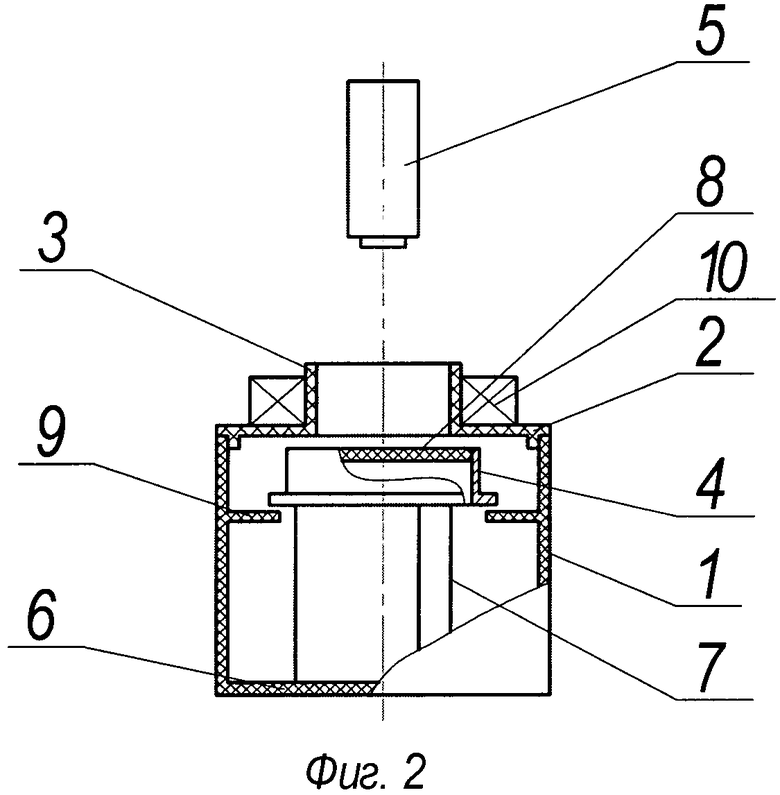
На фиг.1 показано положение элементов конструкции до установки контролируемого магнита (нерабочее положение), а на фиг.2 - с установленным магнитом, когда измеряется смещение оси магнитного поля контролируемого магнита относительно геометрической оси его посадочной поверхности.
Предлагаемое устройство для контроля кольцевых магнитов по магнитному полю содержит немагнитный корпус 1 с немагнитной крышкой 2, имеющей вертикальный цилиндрический выступ 3 для установки контролируемого магнита с возможностью его вращения вокруг своей оси. Внутри корпуса 1 расположена ферромагнитная втулка 4. В качестве измерительной системы 5 может быть система любого типа, фиксирующая отклонение геометрической оси ферромагнитной втулки 4 от геометрической оси посадочной поверхности магнита при нахождении ферромагнитной втулки под воздействием магнитного поля на заданном осевом расстоянии от опорной поверхности магнита. Ферромагнитная втулка 4, в отличие от прототипа, соединена с основанием 6 корпуса 1 гибкой связью 7. В частности, гибкая связь 7 может быть образована тремя равномерно расположенными по окружности гибкими нерастяжимыми нитями. Длина нитей выбирается из условия обеспечения заданного расстояния по вертикали от верхнего торца ферромагнитной втулки 4 до опорной поверхности крышки 2, на которую устанавливается магнит. В простейшем примере конкретного выполнения конструкции предлагаемого устройства имеется экран 8, на котором нанесена шкала Х с делениями. Экран со шкалой Х установлен в центральном отверстии ферромагнитной втулки 4, при этом нулевое деление шкалы Х совпадает с геометрической осью ферромагнитной втулки. До установки магнита ферромагнитная втулка 4 в нерабочем положении устройства (фиг.1) лежит на своей опоре 9 в корпусе 1. При этом нити гибкой связи 7 находятся в ненатянутом состоянии. На немагнитной крышке 2 относительно оси вертикального цилиндрического выступа для установки контролируемого магнита нанесена угловая шкала с делениями на 360°.
Устройство работает следующим образом (фиг.2).
На цилиндрический выступ 3 крышки 2 устанавливают контролируемый магнит 10. Под воздействием магнитного поля эталонного магнита ферромагнитная втулка 4 поднимается со своей опоры 9, происходит натяжение гибкой связи 7, длина которой обеспечивает заданное расстояние по вертикали от верхнего торца ферромагнитной втулки 4 до опорной поверхности контролируемого магнита. При этом ферромагнитная втулка 4 центрируется относительно оси магнитного поля контролируемого магнита. Затем контролируемый магнит 10 вручную вращают и добиваются максимального отклонения ферромагнитной втулки 4 вдоль положительного направления шкалы Х на экране 8. По делениям шкалы фиксируют величину этого отклонения как X1. На поверхности контролируемого магнита 10 наносят (например, краской) метку напротив деления 0° угловой шкалы на немагнитной крышке 2. Затем контролируемый магнит 10 поворачивают так, чтобы метка оказалась напротив деления 180° угловой шкалы на крышке 2. Фиксируют новую величину отклонения ферромагнитной втулки 4 вдоль отрицательного направления шкалы Х на экране 8 как Х2. Искомое смещение оси магнитного поля магнита относительно геометрической оси его посадочной поверхности в диаметральном выражении находят как сумму абсолютных величин полученных значений по формуле Δ=|Х1|+|Х2|.
Таким образом, в предлагаемой конструкции устройства, в отличие от прототипа, отсутствуют наиболее массивные детали, имеющие большую инерционность и снижающие точность совпадения геометрической оси ферромагнитной втулки с осью магнитного поля магнита в процессе отклонения ферромагнитной втулки от вертикального положения. При этом повышается точность измерения смещения оси магнитного поля относительно геометрической оси посадочной поверхности магнита. Предлагаемое более точное устройство для контроля кольцевых магнитов по магнитному полю обеспечит отбраковку некачественных магнитов для собираемых газовых центрифуг.
Кроме того, отсутствие массивного и дорогого в изготовлении ротора-имитатора упрощает конструкцию, уменьшает массу, габариты и стоимость устройства.
Источники информации
1. Стенд для центровки магнитов по магнитному полю. Инструкция по эксплуатации - К96-00-000 ИЭ. Горьковский автомобильный завод, производство нестандартного оборудования, 1983 г.
2. Стенд для центровки магнитов верхней. опоры высокооборотного вертикального ротора. Описание полезной модели. Свидетельство РФ №8755 U1, F16C 32/04, опубл. 16.12.1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2003 |
|
RU2242287C2 |
| СПОСОБ СБОРКИ ГАЗОВОЙ ЦЕНТРИФУГИ | 1998 |
|
RU2154535C2 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2004 |
|
RU2272676C1 |
| ГАЗОВАЯ ЦЕНТРИФУГА | 1999 |
|
RU2161538C1 |
| ВЕРХНЯЯ МАГНИТНАЯ ОПОРА РОТОРА ГАЗОВОЙ ЦЕНТРИФУГИ | 2007 |
|
RU2355478C2 |
| ВЕРХНЯЯ МАГНИТНАЯ ОПОРА РОТОРА ГАЗОВОЙ ЦЕНТРИФУГИ | 2010 |
|
RU2434685C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2004 |
|
RU2265757C1 |
| МАГНИТНАЯ ОПОРА РОТОРА ГАЗОВОЙ ЦЕНТРИФУГИ | 1992 |
|
RU2054334C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2003 |
|
RU2242288C1 |
| МАГНИТНАЯ ПОДВЕСКА (ВАРИАНТЫ) | 2001 |
|
RU2220490C2 |
Изобретение относится к машиностроению и касается конструкции технологического оборудования для измерения смещения оси магнитного поля кольцевого магнита относительно геометрической оси его посадочной поверхности и, в частности, может быть использовано для контроля магнитов верхней магнитной опоры высокоскоростного ротора. Устройство для контроля кольцевых магнитов по магнитному полю содержит немагнитный корпус с немагнитной крышкой, имеющей вертикальный цилиндрический выступ для установки контролируемого магнита с возможностью его вращения вокруг своей оси. Оппозитно магниту внутри корпуса расположена ферромагнитная втулка. Устройство для контроля содержит измерительную систему, фиксирующую отклонение геометрической оси ферромагнитной втулки от геометрической оси посадочной поверхности магнита при нахождении ферромагнитной втулки под воздействием магнитного поля на заданном осевом расстоянии от опорной поверхности магнита. Ферромагнитная втулка соединена с основанием корпуса гибкой связью, длина которой обеспечивает заданное осевое расстояние. Техническим результатом является повышение точности измерения смещения оси магнитного поля кольцевого магнита относительно геометрической оси его посадочной поверхности. 1 з.п. ф-лы, 2 ил.
1. Устройство для контроля кольцевых магнитов по магнитному полю, содержащее немагнитный корпус с немагнитной крышкой, имеющей вертикальный цилиндрический выступ для установки контролируемого магнита с возможностью его вращения вокруг своей оси, оппозитно которому внутри корпуса расположена ферромагнитная втулка, и измерительную систему, фиксирующую отклонение геометрической оси ферромагнитной втулки от геометрической оси посадочной поверхности магнита при нахождении ферромагнитной втулки под воздействием магнитного поля на заданном осевом расстоянии от опорной поверхности магнита, отличающееся тем, что ферромагнитная втулка соединена с основанием корпуса гибкой связью, длина которой обеспечивает упомянутое заданное осевое расстояние.
2. Устройство по п.1, отличающееся тем, что гибкая связь образована тремя равномерно расположенными по окружности нерастяжимыми нитями.
| Асимметричный катодный генератор типа пуш-пуль | 1928 |
|
SU8755A1 |
| Способ контроля положения объекта в замкнутой цилиндрической оболочке | 1986 |
|
SU1322081A1 |
| Препаративная ультрацентрифуга | 1968 |
|
SU500812A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |

