Изобретение относится к судну в соответствии с преамбулой п.1 формулы изобретения. Такое судно известно из публикации Keuning, J.A.; Toxopeus, S.; Pinkster, J.; Влияние формы носа на мореходность быстроходного однокорпусного судна; Труды конференции FAST 2001, сентябрь, 2001; стр.197-206; ISBN 0 903055 70 8, издательство Королевского Института инженеров судостроения. В этой публикации судно согласно изобретению описано как конструкция с клиновидным носом. Известная конструкция вертикального носа конструкции с клиновидным носом, который присущ быстроходным судам, бывает с острым носом, что означает, что борта более или менее сходятся к острому носу, который разрезает поверхность воды. Недостаток этой известной конструкции состоит в том, что из-за малых угловых амплитуд рыскания она приводит к вихрям, возникающим около носа, и это имеет отрицательное влияние на устойчивость курса судна.
Чтобы преодолеть этот недостаток, судно соответствует п.1 формулы изобретения. Посредством придания носу этого судна, сконструированного для высоких скоростей, значительного радиуса, поток вдоль носа более устойчив, что улучшает устойчивость курса при малых угловых амплитудах рыскания.
В соответствии с одним вариантом осуществления изобретения судно соответствует п.2 формулы изобретения. Таким образом избегают чрезмерного сопротивления точки торможения потока и образования брызг.
В соответствии с вариантом осуществления изобретения судно соответствует п.3 формулы изобретения. Таким образом легко получить минимальное расширение поперечного сечения носа так, чтобы смещенный объем при волнении увеличивался только более или менее линейно с осадкой, что приводит к лучшему режиму работы корабля при волнении.
В соответствии с вариантом осуществления изобретения судно соответствует п.4 формулы изобретения. Таким образом стабилизаторы дают улучшенную устойчивость курса судна, независимую от любых управляющих систем. Местоположение стабилизаторов впереди движущих средств и руля(ей) предотвращает выход из воды стабилизаторов в ситуациях, в которых из-за волн, набегающих на корму корабля, рули теряют сцепление с водой в результате такого выхода из воды, таким образом улучшая устойчивость курса при неблагоприятных условиях.
В соответствии с вариантом осуществления изобретения судно соответствует п.5 формулы изобретения. Посредством того, что стабилизаторы находятся под небольшим углом, они находятся под нагрузкой и становятся немедленно активными при малых угловых амплитудах рыскания, что улучшает их положительное влияние.
В соответствии с вариантом осуществления изобретения судно соответствует п.6 формулы изобретения. Таким образом судно может быть приведено в положение дифферента, зависящего от скорости, независимо от нагрузки или распределения массы на судне, таким образом уменьшая лобовое сопротивление и улучшая эффективность тяги.
В соответствии с вариантом осуществления изобретения судно соответствует п.7 формулы изобретения. Посредством использования направления потока из сопел для управления судном и для создания регулируемой восходящей или нисходящей силы возможна компактная конструкция.
В соответствии с вариантом осуществления изобретения судно соответствует п.8 формулы изобретения. Объединение стационарных стабилизаторов с горизонтальным стабилизатором для создания восходящей или нисходящей силы делает возможным компактную конструкцию, посредством чего из-за глубины размещения горизонтального стабилизатора предотвращен его выход из воды.
Изобретение будет объяснено более подробно ниже со ссылкой на несколько примеров вариантов осуществления посредством чертежей.
Фиг.1 изображает вид в перспективе судна согласно первому варианту осуществления изобретения, в котором движущие средства содержат гребные винты.
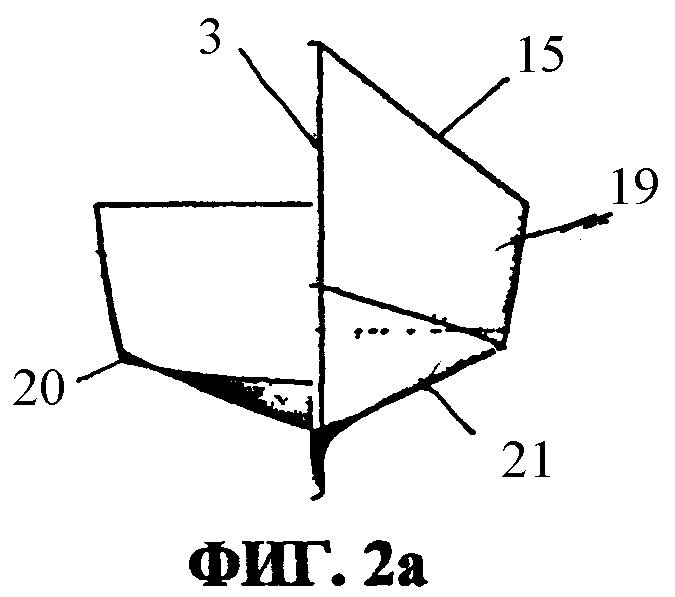
Фиг.2 изображает чертеж корпуса судна согласно изобретению, в котором Фиг.2a изображает различные поперечные сечения, Фиг.2b изображает вид сбоку и Фиг.2c изображает вид снизу.
Фиг.3 изображает схематично корму судна в соответствии с Фиг.1, вид сзади и вид сбоку.
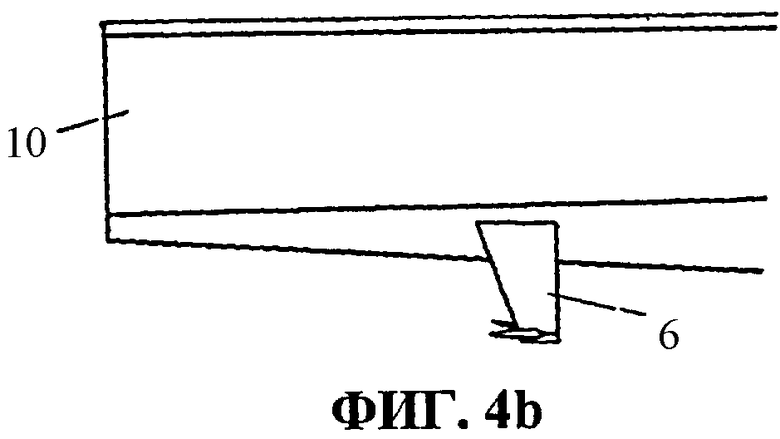
Фиг.4 изображает схематично корму судна в соответствии с дополнительным вариантом осуществления изобретения, вид сзади и вид сбоку.
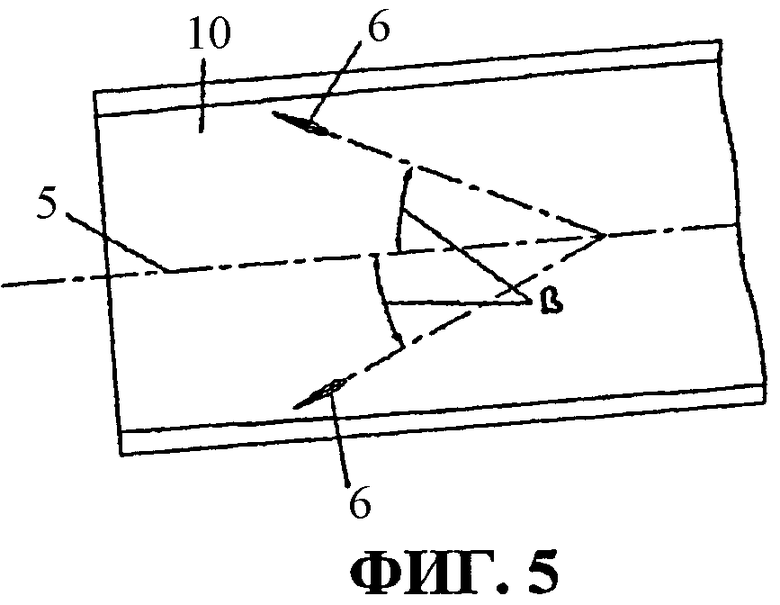
Фиг.5 изображает схематично вид снизу кормы судна, предыдущих вариантов осуществления и особо угол схождения вертикальных стабилизаторов.
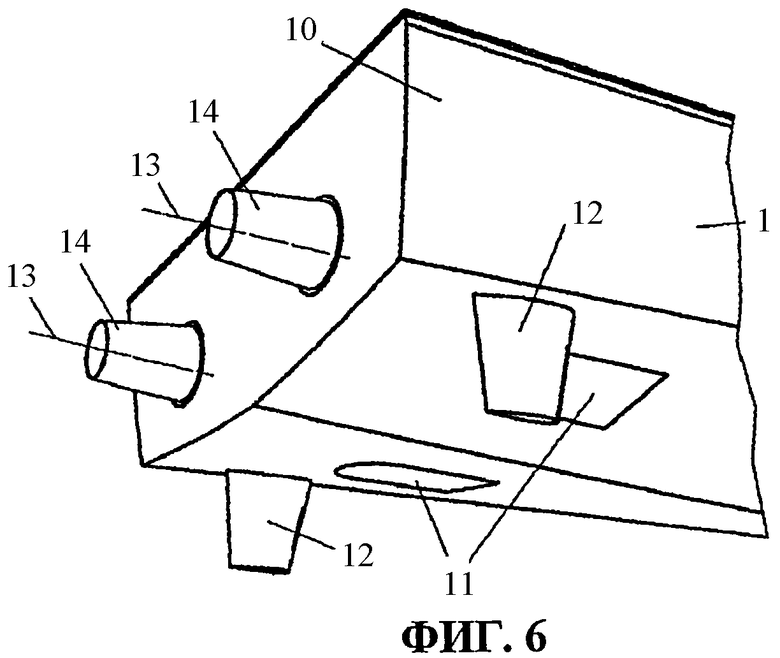
Фиг.6 изображает вид в перспективе кормы судна согласно дополнительному варианту осуществления изобретения, в котором движущие средства содержат водометы.
Фиг.1 изображает судно 1, которое разработано в соответствии с чертежом корпуса согласно Фиг.2. Судно 1 разработано для высоких скоростей и имеет единый длинный и узкий корпус с бортами 19, в котором длина корпуса по меньшей мере в пять раз больше ширины и для более длинных судов больше ширины в целых семь-восемь раз. В более коротких судах ширина относительно больше, поскольку корпус должен содержать движущие средства, и большая ширина обеспечивает то, что он останется достаточной стабильным. Судно 1 имеет один или более гребных винтов 8 и один или более рулей 9. Для маневрирования около носа 3 имеется носовое подруливающее устройство 4. Расположение пульта управления известное, например, в рулевой рубке 2.
Как может быть видно на Фиг.2, корпус судна 1 имеет особую конструкцию, точнее конструкция такова, что уменьшение сил Фруда-Крылова, в особенности в носовой части корабля, достигнуто посредством минимизации изменения в моментальном погруженном объеме корпуса, в то время как оно осуществляет большие относительные перемещения относительно уровня воды из-за волн или перемещения судов. Это приводит к конструкции c применением вертикальных бортов 19 насколько это допустимо. Дополнительная осадка конструкции должна уменьшить изменение ширины ватерлинии в секциях, в частности в носовой части судна, в то время как оно совершает упомянутые большие относительные перемещения. Это подразумевает, что имеет место минимальное расширение бортов в носовой секции и нос 3 имеет более или менее вертикальную линию или продлен менее чем на 5 градусов вперед или назад. Посредством осуществления этого изменение присоединенной массы секций минимизировано, и с помощью этого также минимизированы изменения гидродинамической подъемной силы в носовой части корабля. Посредством увеличения надводного борта и приведения линии палубы 15 выше к носу 3 в носовой части судна обеспечен достаточный запас плавучести.
Значение увеличенного сдвига в носовой части судна, изображенное на Фиг.2 как линия палубы 15, зависит от размера судна, скорости и имеющего места режима волнения. Наклоняющаяся вниз к носовой части корабля диаметральная линия 5 предотвращает носовые секции от выхода из воды и возвращения обратно в воду, в то время как судно выполняет большие относительные перемещения. Диаметральная линия 5 в своей самой нижней части около носа 3 находится около точки 16, которая обозначает максимальное углубление судна относительно ватерлинии 17. Значение отрицательного угла наклона в основании 21 зависит от размера судна, скорости и имеющего места режима волнения. Угол килеватости секций от носа до кормы строго вычислен, чтобы минимизировать выталкивающее усилие и все же поддержать достаточную гидродинамическую подъемную силу с минимальным сопротивлением.
Полученная в итоге форма корпуса такова, что корпус является длинным и узким, нет расширения в носовых секциях и борта 19 в носовых секциях являются почти вертикальными. Около носа 3 борта 19 образуют угол α, видимый в горизонтальной плоскости, который менее 40 градусов. Кривизна по направлению вперед и угол наклона нижней диаметральной линии вперед увеличены, и края ватерлиний 20 закруглены. Чтобы уменьшить смоченную поверхность, нос 3 закруглен с радиусом R по меньшей мере 0,1 м. Зависимый от ширины судна, радиус может быть по меньшей мере 1% от ширины. Дополнительное преимущество этого радиуса R состоит в том, что таким образом избегают вихря, возникающего вдоль бортов 19 судна. Это возникновение вихря могло бы произойти в этой конструкции при малых угловых амплитудах рыскания, когда нос слишком острый, как обычно происходит с быстроходными судами. Возникновения вихря надо избежать, поскольку он мог бы привести к неустойчивости курса. Чтобы предотвратить это, закругленный нос 3 создает слишком большое сопротивление точки торможения потока и/или образует слишком много брызг, радиус R составляет менее 4% от ширины.
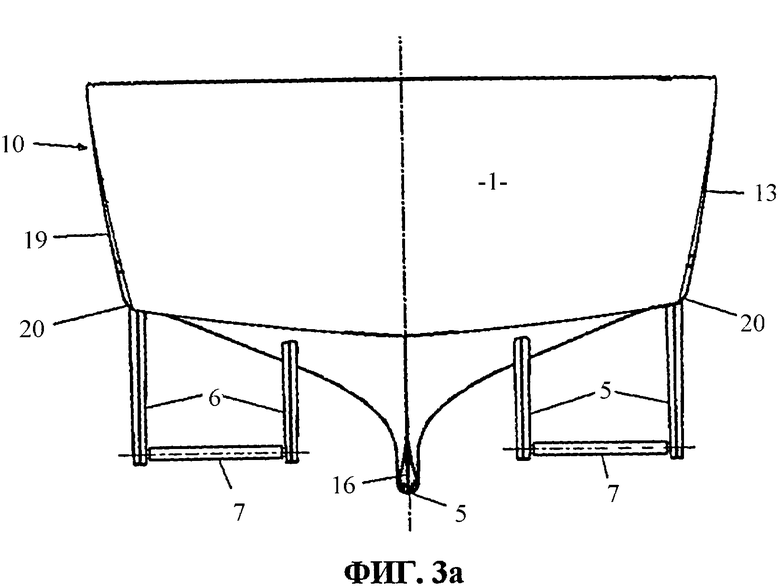
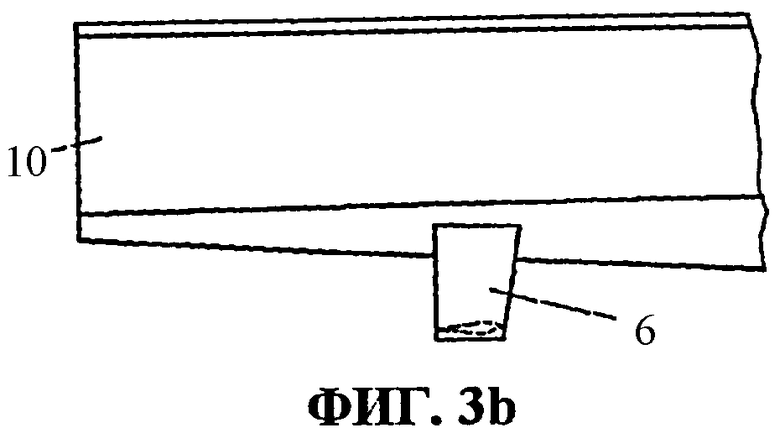
В условиях применения этой новой формы корпуса должны быть использованы дополнительные меры для того, чтобы поддержать адекватное рыскание или удержать стабильный курс и предотвратить нежелательные проблемы с управлением, в частности при попутных или кормовых волнах. Сам корпус производит нарушающие устойчивость отклоняющие от курса и качающие силы и моменты, которые могут привести к этой нестабильности. Введением неподвижных вертикальных стабилизаторов или скегов 6 в кормовой части корпуса эта нестабильность предотвращена. Стабилизаторы 6 предпочтительно имеют крыловидную форму сечения и имеют разумные соотношения параметров, чтобы создать адекватную подъемную силу, чтобы противодействовать влиянию дестабилизации при рыскании и качке корпуса. Они разработаны, чтобы оптимизировать устойчивость при рыскании, в частности, за счет минимального увеличения сопротивления. Стабилизаторы 6 расположены на удалении от диаметральной линии 5 и предпочтительно около бортов 19 так, чтобы они были на удалении от зоны возмущений в воде, которая является результатом максимального отклонения 16 носа 3, который находится в воде намного глубже, чем корма судна 10. Предпочтительно они находятся перед рулями 9 и движущими средствами так, чтобы они удерживали сцепление с текущей водой, даже когда рули 9 выходят из воды из-за набегающих волн от кормы судна.
Момент стабилизации корпуса по дифференту является относительно маленьким, если сравнивать с подобным судном. При меньшей протяженности это также правомерно для стабилизирующей силы в вертикальных колебаниях. Вертикальные колебательные перемещения, но в особенности перемещения по дифференту, могут быть очень эффективно уменьшены применением одного или более активизированных горизонтальных стабилизаторов 7 на корме судна 10. Эти стабилизаторы 7 создают положительную или отрицательную подъемную силу и могут быть отрегулированы вручную, если использованы только для регулирования дифферента, или управляемы (на борту) датчиками и алгоритмами управления. В варианте осуществления Фиг.1 есть два горизонтальных стабилизатора 7, которые могут работать вместе и таким образом прикладывать усилия на корму судна 10, которые противодействуют вертикальным колебаниям и/или дифференту судна 1 и могут привести его в его оптимальный режим. В другом варианте осуществления эти два горизонтальных стабилизатора 7 могут быть управляемы таким способом, при котором они создают противоположно действующие восходящие и нисходящие силы и так создают крутящий момент в продольном направлении на судне 1, который противодействует вращению так, чтобы при надлежащем управлении стабильность могла быть улучшена.
Погруженные в воду горизонтальные стабилизаторы 7, смоченные с обеих сторон, рассчитаны на создание подъемной силы со стороны высокого давления и со стороны пониженного давления, обычной для подводных крыльев, и они предпочтительно размещены достаточно глубоко ниже уровня воды, чтобы предотвратить вентилирование или кавитации со стороны пониженного давления вдоль стабилизаторов 7. В частности, они могут быть использованы для активного управления углом дифферента в спокойной воде, зависящим от скорости судна 1, чтобы привести к оптимальной устойчивости судна, для активного управления дифферентным и вертикальным перемещением посредством автопилота и алгоритмом управления и также посредством применения дифференциального рулевого управления для левых и правых горизонтальных стабилизаторов можно управлять перемещениями при бортовой качке.
Фиг.3a изображает судно 1 на Фиг.1 сзади с вертикальными стабилизаторами 6, где с каждой стороны диаметральной линии 5 расположены два стабилизатора 6 и где между этими двумя стабилизаторами установлен один горизонтальный стабилизатор 7. Фиг.3b изображает тот же вид сбоку. Для облегчения восприятия гребные винты 8 и рули 9 не показаны. Как можно видеть на Фиг.1, гребные винты 8 и рули 9 расположены сзади стабилизаторов 6 и 7. Очевидно, что для приведения в движение судна 1 возможны различные конструкции, такие как три гребных винта 8, как показано на Фиг.1, два гребных винта, два гребных винта с одним водометом, один гребной винт с двумя водометами и также двумя или больше водометами, как показано на Фиг.6 (обсуждено позднее).
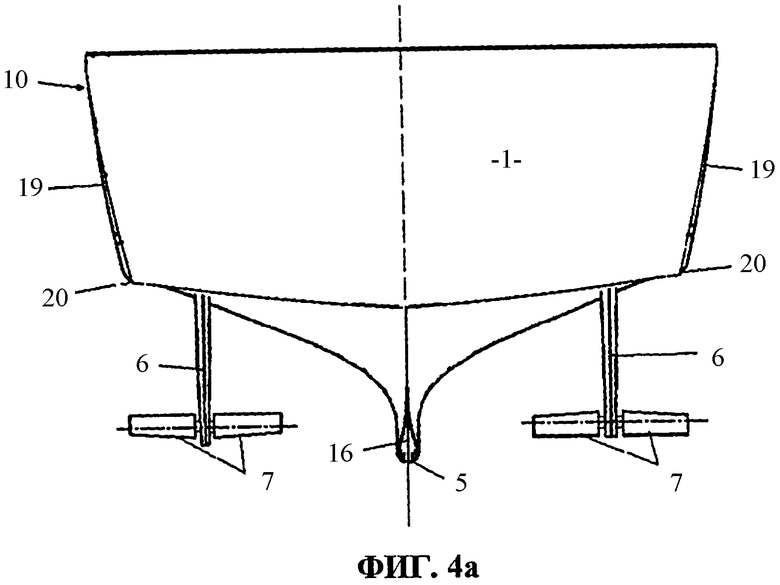
Фиг.4a и 4b изображают подобные виды дополнительного варианта осуществления вертикальных стабилизаторов 6 и горизонтальных стабилизаторов 7. В этом варианте осуществления горизонтальный стабилизатор 7 продолжается от обеих сторон вертикального стабилизатора 6. Вертикальный стабилизатор 6 расположен немного дальше от борта 19 так, чтобы горизонтальный стабилизатор 7 не выступал по ширине судна 1. Эти два горизонтальных стабилизатора 7, проходящие к двум сторонам вертикального стабилизатора 6, имеют общую ось и соединены с единым приводом так, чтобы они перемещались вместе. В варианте осуществления, изображенном на Фиг.4, горизонтальные стабилизаторы 7 на правом борту создают в перемещающемся вперед судне 1 силу, направленную вверх, и горизонтальные стабилизаторы 7 на левом борту создают силу, направленную вниз. Эти две силы образуют на судне 1 крутящий момент, направленный против часовой стрелки, который может быть использован для противодействия силам, которые возникают в результате, например, волнения.
Передняя кромка вертикальных стабилизаторов 6 изображена более-менее вертикальной, так как в этом случае поток воды вокруг лопасти является самым эффективным для создания стабилизирующей силы. Очевидно, что будут созданы такие же условия, если вертикальные стабилизаторы 6 будут, например, вертикальными в плоскости нижней стороны судна 1, тогда как передняя кромка стабилизатора будет более или менее перпендикулярна потоку воды относительно стабилизатора 6. Передняя кромка вертикальных стабилизаторов 6 может также быть немного изогнута назад так, чтобы материал, обернутый вокруг передней кромки, направлялся к концу стабилизатора и освобождался от стабилизатора. В изображенных вариантах осуществления вертикальные стабилизаторы 6 объединены с горизонтальными стабилизаторами 7. Очевидно, что для надлежащего функционирования вертикальных лопастей 6 этого не требуется. Фиг.5 показывает, что вертикальные стабилизаторы 6 образуют небольшой угол β с диаметральной линией 5 так, чтобы когда судно 1 перемещается по прямой линии вперед, имеют место устойчивые условия потока вокруг стабилизатора 6 по длине стабилизатора 6, видимой в направлении потока, и возможно немедленно получить корректирующую силу, если волны набегают на корму судна 10 и изменяют направление потока к стабилизатору 6 и условия потока вокруг стабилизатора 6. Значение угла β зависит от локальных условий потока и, следовательно, от формы нижней стороны судна 1. На практике значение угла β может быть между 1 и 3 градусами или приблизительно 1,5 градуса.
В изображенных вариантах осуществления лопасти горизонтальных стабилизаторов 7 имеют ось горизонтального вращения, таким образом обеспечивая условия, подобные аэрации вдоль стабилизатора 7. В зависимости от определенных условий, это не всегда является существенным. Например, чтобы уменьшить гидродинамическое сопротивление при нормальных условиях, предпочтительно можно было бы иметь горизонтальный стабилизатор 7, заметно перпендикулярный к длине, параллельной нижней стороне судна 1. В ситуациях, где нет необходимости противодействовать вращению судна 1, достаточно иметь горизонтальный стабилизатор 7 с единым приводом, который может находиться по полной ширине судна 1 и который используется только для того, чтобы обеспечить надлежащий дифферент судна 1. Для стабильности этот горизонтальный стабилизатор 7 может быть поддержан в центре.
Фиг.6 изображает корму судна 10 дополнительного варианта осуществления, для которого корпус разработан подобно изображенному на Фиг.1. Движущие средства судна 1 в этом варианте осуществления представляют собой водометы. Для устойчивости курса имеются вертикальные стабилизаторы 12, эти вертикальные стабилизаторы более или менее такие же, как и обсужденные ранее вертикальные стабилизаторы 6 без добавленных к ним горизонтальных стабилизаторов 7. На нижней стороне судна есть водоприемные устройства 11 для впуска воды, которая течет к водометам, и воды, вытекающей из сопел 14 в направлении диаметральной линии 13. Для регулировки диаметральные линии 13 могут быть перемещены известным способом в горизонтальной плоскости. Для создания восходящих и нисходящих сил на корме судна 10 диаметральные линии 13 могут быть перемещены подобным способом в вертикальной плоскости по горизонтальной оси. Контрольное устройство направления диаметральных линий 13 расположено так же, как и контрольное устройство горизонтальных стабилизаторов 7, и предпочтительно соединено с автопилотом для активного контроля, имеющего алгоритм контроля, и датчиками, применяемыми для определения положения и перемещения судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДВИЖЕНИЯ НАДВОДНОГО ОДНОКОРПУСНОГО ВОДОИЗМЕЩАЮЩЕГО БЫСТРОХОДНОГО СУДНА | 2013 |
|
RU2562086C2 |
| ГЛИССЕР | 1995 |
|
RU2150401C1 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2008 |
|
RU2384456C2 |
| Кормовая оконечность стабилизированного для штормового плавания корабля | 2015 |
|
RU2607135C2 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |


Изобретение относится к судостроению и касается создания высокоскоростных судов с высокими мореходными качествами, позволяющими осуществлять их эксплуатацию в условиях сильного волнения. Судно для использования при высоких скоростях и сильных волнениях содержит единый длинный и узкий корпус с узкой шириной и более или менее вертикальным носом. Передняя половина корпуса имеет более или менее вертикальные борта, минимальное расширение носовых секций и увеличение к носу осадки по его диаметральной линии, объединенное с более или менее подобным увеличением надводного борта. Корма корпуса выполнена с плоским или ровным V-образным днищем и с одним или более гребным винтом и/или с водометами в качестве движущих средств. Нос имеет радиус кривизны, равный, по меньшей мере, 1% от ширины. Изобретение позволяет обеспечивать более устойчивый поток воды вдоль носа корпуса судна, что улучшает устойчивость курса движения судна при малых угловых амплитудах рыскания. 7 з.п. ф-лы, 6 ил.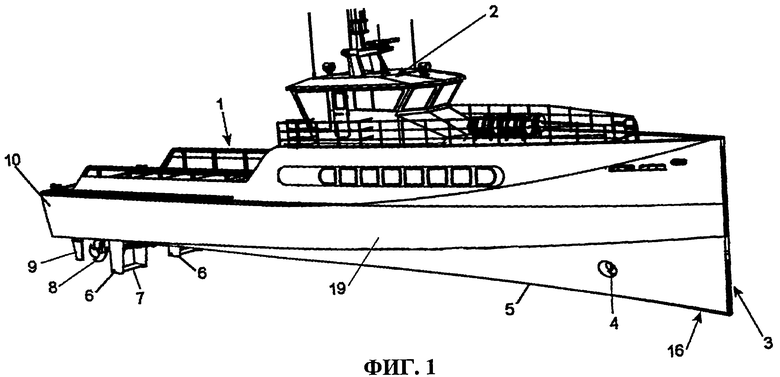
1. Судно для использования при высоких скоростях и сильных волнениях, имеющее единый длинный и узкий корпус с узкой шириной и более или менее вертикальным носом (3), в котором передняя половина корпуса имеет более или менее вертикальные борта (19), минимальное расширение носовых секций и увеличение к носу (3) осадки по его диаметральной линии (5), объединенное с более или менее подобным увеличением надводного борта, и в котором корма (10) корпуса имеет плоское или ровное V-образное днище с одним или более гребным винтом (8) и/или водометами (14) в качестве движущих средств, отличающееся тем, что нос (3) имеет радиус (R) кривизны, по меньшей мере, 1% от ширины.
2. Судно по п.1, в котором радиус (R) кривизны составляет, по меньшей мере, 4% от ширины.
3. Судно по п.1 или 2, в котором борта (19) около носа (3) образуют острый угол (α) меньше, чем 40°.
4. Судно по п.1 или 2, в котором у кормы (10) корпуса перед рулями и движущими средствами около каждого борта (19) установлен, по меньшей мере, один более или менее вертикальный постоянный стабилизатор (6; 12).
5. Судно по п.4, в котором постоянные стабилизаторы (6; 12) образуют с носом угол (β), составляющий 1-3° с диаметральной линией (5).
6. Судно по п.1 или 2, в котором корпус на корме (10) корпуса имеет средства (7; 14) создания регулируемой силы, для создания восходящей и/или нисходящей силы.
7. Судно по п.6, в котором средства создания регулируемой силы образованы соплами (14) водометов.
8. Судно по п.6, в котором у кормы (10) корпуса перед рулем и движущими средствами около каждого борта (19) установлен, по меньшей мере, один более или менее вертикальный постоянный стабилизатор (6; 12) и средства создания регулируемой силы содержат, по меньшей мере, один более или меньше горизонтальный стабилизатор (7), прикрепленный к постоянным стабилизаторам около их перпендикуляра максимальной глубины к диаметральной линии судна и этот горизонтальный стабилизатор(ы) способен вращаться вокруг продольной оси горизонтального стабилизатора(ов).
| НАДВОДНОЕ ОДНОКОРПУСНОЕ ВОДОИЗМЕЩАЮЩЕЕ БЫСТРОХОДНОЕ СУДНО | 1999 |
|
RU2155693C1 |
| КОРПУС СУДНА (ВАРИАНТЫ) | 1995 |
|
RU2129505C1 |
| Способ получения прямоугольных импульсов для исследования ферромагнитных материалов | 1959 |
|
SU134767A1 |

