Изобретение относится к области производства подводных работ с использованием буксируемых подводных аппаратов (БПА) преимущественно оснащенных гидроакустической измерительной аппаратурой, и предназначено для обеспечения пространственной ориентации буксируемого подводного аппарата относительно судна буксировщика и исследуемого подводного объекта, а более конкретно для установки и транспортировки многолучевого параметрического профилографа, работающего на принципах нелинейной параметрической акустики для обследования трубопроводов и других заиленных объектов природного и техногенного происхождения.
Известно устройство, представляющее собой буксируемый подводный аппарат [1], выполненный в виде полого цилиндрического тела со съемной головкой и хвостовыми частями и оснащенный носовой и кормовой телекамерами, гидролокатором бокового обзора с дальностью действия 100 м и параметрическим профилографом с цветным индикатором и вычислительно-управляющим модулем. Размеры БПА составляют: длина 1300 мм, диаметр 210 мм. Ввод сигнальных жил кабель-троса выполнен в головной части, кабельные вводы для приемных и излучающих антенн выполнены рядом с антеннами, все они герметичны и рассчитаны на погружение до глубины 100 м. На боковых частях буксируемого тела выполнены установочные площадки для четырех преобразователей накачки, на специальных бандажах крепятся четыре приемные антенны. Размещение четырех антенн позволяет производить зондирование в горизонтальной и вертикальной плоскостях, а также дает возможность с помощью наклоненной под углом 20 градусов антенны получать панорамное изображение рельефа дна.
Уменьшение рысканий и дифферента решается с помощью хвостового стабилизатора, выполненного в виде широкополосного обода, соединенного с хвостовой частью цилиндрического корпуса пластинчатыми спицами.
Стабилизация по крену (вращательное движение вокруг продольной оси) достигается за счет смещения центра тяжести буксируемого тела.
Необходимое заглубление буксируемого тела при минимальной вытравке кабель-троса осуществляется путем использования заглубительной решетки, что позволяет осуществлять отведение всей буксируемой системы в сторону от судна-носителя.
Ввиду того, что на БПА используют излучатели с узкими характеристиками направленности, то нейтрализация крена и рысканий БПА является определяющим фактором при выполнении установленных требований, при решении таких задач, как обнаружение и контроль заиленного трубопровода, измерение толщины ила над ним, определение структуры донных слоев, оценка характеристик морского донного грунта, а также при проведении различных поисковых работ на подводных морских сооружениях, включая съемку рельефа дна.
БПА, как правило, используются для океанографических исследований в районах с особо сложными физико-географическими условиями (прикромочные районы Арктики, во фронтальных зонах и вокруг айсбергов). Указанные районы отличаются тем, что в них образуются температурно-соленостные неоднородности и вихри различных масштабов, оказывающие значительное влияние на распределение скорости в месте проведения исследований.
При этом измерения должны производиться непрерывно и при этом при выявлении неоднородностей расстояние между разрезами не должно превышать половины минимального диаметра неоднородностей, а частота измерения на разрезах не должна быть меньше 1/8-1/10 диаметра неоднородности (см., например: А.Т.Швецов. Использование автономных самоходных буксируемых измерительных комплексов для исследования неоднородностей океанографических полей. // Записки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с.48).
БПА как техническое средство для проведения гидрологических работ представляет собой динамическую систему, имеющую шесть степеней свободы: три степени свободы по линейным перемещениям, характеризующим траекторию движения БПА по курсу, скорости и глубине погружения, три степени свободы по угловым перемещениям БПА по дифференту, рысканию и крену.
В существующих способах проведения гидрологических работ (съемка рельефа дна, поиск затонувших объектов, мониторинг трубопроводов и т.д.) точность определения параметров посредством установленных на БПА гидроакустических средств, в основном, оценивается по точности определения места судна-носителя и БПА.
Однако, при детальной съемке, точность привязки исследуемых подводных элементов к координатам в значительной степени определяется положением на дне пятна, освещаемого гидроакустическим средством, положение этого пятна в свою очередь зависит от ориентации и глубины погружения БПА (см., например: В.Н.Завгородний. О влиянии погрешностей ориентации и глубины погружения буксируемого подводного аппарата на точность съемки рельефа дна. // 3аписки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с.33).
Качество гидроакустических зондирований подводных объектов в первую очередь зависит от точности стабилизации положения аппарата по глубине, рысканию, дифференту и крену.
Требования к точности стабилизации аппарата при его буксировке, как правило, определяются шириной характеристики направленности гидроакустического средства в горизонтальной и вертикальной плоскостях.
При этом глубина погружения регулируется длиной кабель-троса, а стабилизация ориентации по дифференту и рысканию определяется обводами корпуса БПА, местом крепление кабель-троса к корпусу аппарата, фиксированным положением рулей. Кроме того, траектория движения БПА по глубине и ориентация по рысканию и дифференту зависят от скорости буксировки, подводных течений и воздействия волнения моря на судно-буксировщик.
Как показывает выполненный анализ погрешностей съемки дна с использованием гидроакустических средств, установленных на БПА, наибольший вклад в радиальную погрешность вносят погрешности съемки рельефа из-за рыскания, крена и дифферента БПА. Немаловажным фактором является и производительность съемки рельефа дна. Производительность съемки рельефа дна зависит от скорости буксируемого БПА и ширины обследуемой полосы рельефа дна. При увеличении полосы съемки рельефа дна точность съемки ухудшается, что требует повышения кратности зондирования рельефа дна посылками импульсов и, следовательно, ведет к уменьшению скорости буксировки. Скорость буксировки БПА также оказывает противоречивое влияние на качество съемки. При увеличении скорости точность улучшается из-за лучшей стабилизации ориентации и глубины БПА, а кратность зондирования рельефа дна гидроакустическим средством для повышения точности уменьшается, т.е. имеет место задача оптимизации выбора скорости буксировки и ширины полосы, обследуемой гидроакустическим средством.
В известных устройствах стабилизации [2, 3] устойчивость движения и ориентации, применительно к надводным судам, достигается за счет использования следящих систем положения рулей как регуляторов с обратной связью для удержания заданного положения судна. Однако известные системы стабилизации [2, 3] имеют сложную конструкцию и существенные массогабаритные характеристики, что практически исключает их применение на БПА, имеющих небольшие массогабаритные характеристики.
Также известно, что все буксируемые средства подвержены рысканию (см., например: Аносов А.В., Дидык А.Д. Управление судном и его техническая эксплуатация. М.: Транспорт, 1976, 504 с. Знамеровский Б.П. Теоретические основы управления судном. Л.: ЛВИМУ, 1974, с.124), и полностью исключить влияния рыскания при их буксировке при использовании известных конструкций буксируемых подводных аппаратов практически невозможно.
Кроме того, известные конструкции подводных аппаратов не позволяют выполнять буксировку при скорости движения более 3 уз. из-за наличия в их конструкции заглубительной решетки.
Задачей заявляемого технического решения является повышение точности ориентации буксируемого подводного аппарата за счет уменьшения влияния рыскания, дифферента и сноса буксируемого аппарата под действием подводных течений.
Поставленная задача решается за счет того, что в буксируемом подводном аппарате [1], выполненном в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, снабженным заглубляющим устройством и оснащенным параметрическим профилографом с цветным индикатором и вычислительно-управляющим модулем, соединенным с судном-буксировщиком кабель-тросом, в котором стабилизатор состоит из четырех плоскостей, образующих x-образную конструкцию, заглубляющее устройство установлено в средней части цилиндрического корпуса на верхней его поверхности и выполнено в виде горизонтального заглубляющего крыла, которое сочленено с вертикальными симметричными крыльями, выполненными в виде элерона, на верхней плоскости горизонтального заглубляющего крыла установлено приспособление для крепления кабель-троса, выполненное в виде силовой гребенки, кабель-трос снабжен гидродинамическим заглубителем, выполненным из профильных пластин, изогнутых по дуге круга и установленных между боковинами, цилиндрический корпус опирается на раму, выполненную из труб в виде салазок, которые соединены с цилиндрическим корпусом в его носовой части посредством двух наклонных плоских листов, а в кормовой части посредством двух нижних элементов стабилизатора буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из микромеханических гироскопов и акселерометров, векторного магнитометра многоканального аналого-цифрового преобразователя и цифрового сигнального процессора, информационно соединенного с бортовой аппаратурой управления судна-буксировщика вычислительно-управляющего модуля.
Совокупность новых отличительных признаков, заключающихся в том, что стабилизатор состоит из четырех плоскостей, образующих x-образную конструкцию, заглубляющее устройство установлено в средней части цилиндрического корпуса на верхней его поверхности и выполнено в виде горизонтального заглубляющего крыла, которое сочленено с вертикальными симметричными крыльями, выполненными в виде элерона, на верхней плоскости горизонтального заглубляющего крыла установлено приспособление для крепления кабель-троса, выполненное в виде силовой гребенки, кабель-трос снабжен гидродинамическим заглубителем, выполненным из профильных пластин, изогнутых по дуге круга и установленных между боковинами, цилиндрический корпус опирается на раму, выполненную из труб в виде салазок, которые соединены с цилиндрическим корпусом в его носовой части посредством двух наклонных плоских листов, а в кормовой части - посредством двух нижних элементов стабилизатора, буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из микромеханических гироскопов и акселерометров, векторного магнитометра, многоканального аналого-цифрового преобразователя и цифрового сигнального процессора, информационно соединенного с бортовой аппаратурой управления судна-буксировщика и вычислительно-управляющего модуля, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «изобретательский уровень».
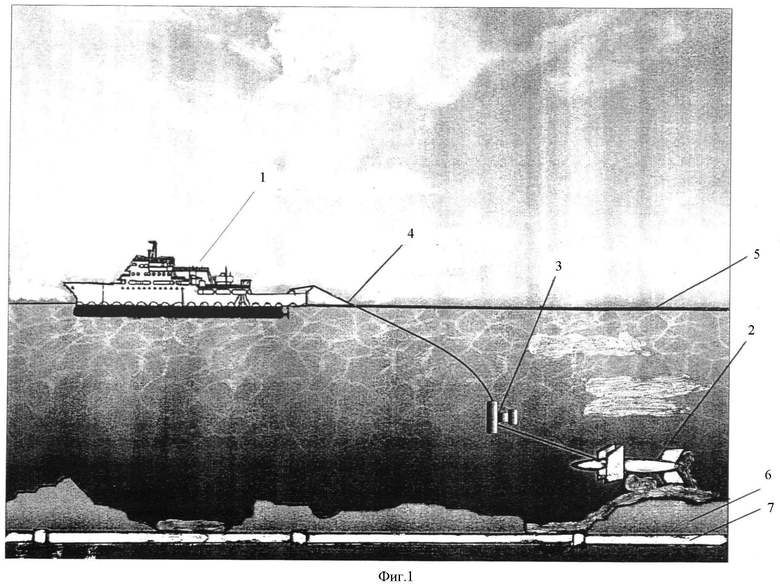
Сущность предлагаемого технического решения поясняется чертежами. Фиг.1 - схема буксировки подводного аппарата. На схеме показаны: судно буксировщик 1, снабженное устройствами постановки и буксировки подводного аппарата, буксируемый подводный аппарат 2, устройство заглубления 3, кабель-трос 4, морская поверхность 5, морское дно 6, трубопровод 7.
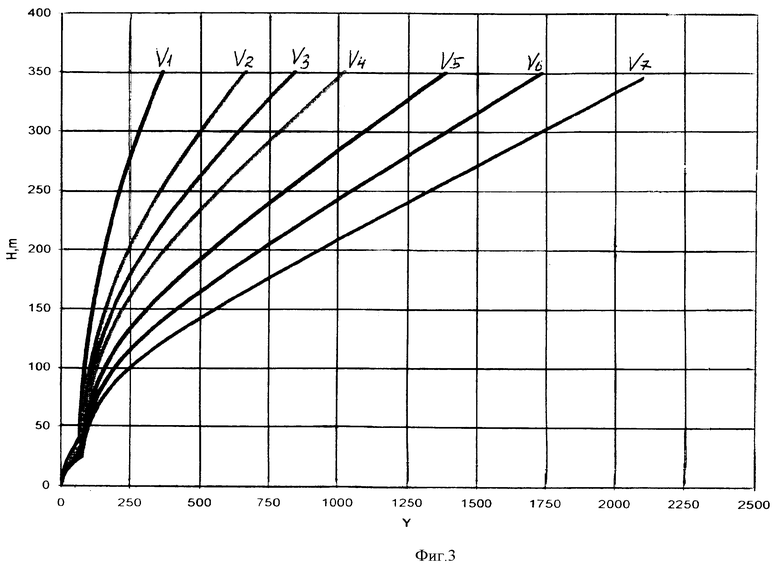
Фиг.2 - общий вид подводного аппарата. Подводный аппарат 2 включает прочный корпус 8, защитную раму 9, стабилизатор 10, горизонтальное заглубляющее крыло 11, поворотные вертикальные крылья 12, приспособление 13 для установки буксировочного узла и кабель-троса 4, обтекатель 14, обтекатель 15 антенны параметрического профилографа.
Фиг.3 - положение буксирной линии от судна буксировщика до рабочей глубины 350 м при различных скоростях буксировки, где Hm - рабочая глубина, Y - длина буксировочного троса, V - скорость буксировки (V1=3 yз.; V2=4 уз.; V3=4,5 уз.; V4=5 уз.; V5=6 уз.; V6=7 уз.; V7=8,2 уз.).
Судно буксировщик 1 содержит штатные судовые средства постановки буксируемого подводного аппарата, оснащенного гидроакустическими средствами зондирования подводной обстановки. К средствам постановки относятся лебедки, подъемные краны и т.д.
Внутри прочного корпуса 8 установлены приборы параметрического профилографа, система ориентации и навигации и вычислительно-управляющий модуль.
Управление буксируемым подводным аппаратом 2 осуществляется посредством бортовой аппаратуры, установленной в пульте управления на борту судна-буксировщика 1.
Защитная рама 9 представляет собой изготовленные из труб салазки, на которые опирается прочный корпус 8 буксируемого подводного аппарата. Рама обеспечивает устойчивое положение буксируемого подводного аппарата на палубе и защищает антенны профилографа, расположенные под прочным корпусом 8, от случайных ударов о грунт и палубу. Салазки соединены с прочным корпусом 5 в носовой части буксируемого подводного аппарата при помощи двух наклонных плоских листов и в кормовой части при помощи двух элементов стабилизатора. Защитная рама изготовлена из алюминиевого сплава АМГ-6.
Прочный корпус 8 обеспечивает защиту расположенной внутри него аппаратуры от воздействия морской воды. В конструкции используется цилиндрический прочный корпус из алюминиевого сплава АМГ-6, имеющий внутренний диаметр 200 мм и толщину стенки 8 мм. Длина цилиндрической части корпуса (1800 мм) обеспечивает необходимый объем для размещения электронной аппаратуры. Прочный корпус 8 закрывается обтекателями 14, выполненными в виде полусферических крышек. На переднем обтекателе может быть установлена антенна гидролокатора. В заднем обтекателе расположены кабельные герметические разъемы и герметический ввод буксировочного кабель-троса 4.
Стабилизатор 10 обеспечивает гидродинамическую устойчивость буксируемого аппарата направлению движения. Стабилизатор 10 имеет четыре плоскости, образующие x-образную конструкцию. Плоскости имеют профиль крыла и изготовлены из алюминиевого сплава АМГ-6. Вертикальные крылья 12 служат для управления положением буксируемого аппарата горизонтальной плоскости. Вертикальные крылья 12 прикреплены к горизонтальному заглубляющему крылу, имеют симметричный обтекаемый профиль. Расположение вертикальных крыльев выбрано таким образом, чтобы равнодействующая боковых сил при их повороте проходила через буксировочный узел. При этом условии аппарат перемещается лагом без изменения угла курса.
Вертикальные крылья 12 приводятся в действие автоматизированным электроприводом триммирования ЭПТ-324 (двухдвигательный механизм поступательного движения, выполненный единым узлом). Электропривод позволяет осуществлять управление исполнительным механизмом по двум независимым электрическим каналам. Электропривод устанавливается в горизонтальном заглубляющем крыле 11 в разгруженном корпусе, заполненном маслом. Горизонтальное заглубляющее крыло 11 используется для перемещения буксируемого аппарата на рабочую глубину. Имеет симметричный профиль. Площадь крыла составляет ~0,5 м2, что позволяет при скорости 8,2 узла получить заглубляющее усилие ~500 кГ.
На наружной поверхности горизонтального заглубляющего крыла 11 расположена силовая гребенка, позволяющая менять точку приложения усилия буксировки.
На концевых участках горизонтального заглубляющего крыла 11 установлены вертикальные крылья 12, выполненные в виде элерона, и представляют собой рули активной стабилизации буксируемого подводного аппарата 2 по крену.
Буксировочный кабель-трос 4 выполнен с учетом больших скоростей буксировки (до 8,2 уз.). При этом важнейшими характеристиками кабель-троса 4 являются его механические параметры, такие как диаметр, разрывное усилие и вес погонного метра. Натяжение кабель-троса на коренном конце при скорости буксирования 8,2 узла (4,1 м/сек) будет более 40 кН. Поэтому грузонесущая часть кабель-троса 4 имеет наружную броню из стальных оцинкованных проволок с разрывным усилием не менее 70 кН.
Так как по кабель-тросу 4 передается большой объем информации от параметрического профилографа и приборов навигации на судно-буксировщик и передача команд управления на буксируемый аппарат, то конструкция кабель-троса 4 имеет два оптических канала связи. Для заполнения сердечника и расширения функционального использования кабель-троса 4 в его конструкцию введены шесть сигнальных проводников.
В конкретном исполнении использован кабель-трос типа КГ(6×0,2+2×100 В)-70-90, отвечающего вышеизложенным требованиям.
Устройство заглубления 3 представляет собой гидродинамический заглубитель, который осуществляет перемещение буксируемого аппарата 2 по вертикали на рабочие глубины при заданных скоростях буксировки и длинах кабель-троса 4. Гидродинамический заглубитель 3 представляет собой конструкцию, в которой используются профили пластин, изогнутых по дуге круга и установленных между боковинами. Гидродинамический заглубитель 3 устанавливается на кабель-тросе 4 на расстоянии от 60 до 80 метров от буксируемого подводного аппарата 2.
Пульт управления буксируемым подводным аппаратом 2 установлен на палубе судна буксировщика 1. В пульте управления расположен силовой блок, обеспечивающий преобразование электроэнергии и питание механизмов и оборудования буксируемого аппарата 2, блок электроники, персональный компьютер и органы управления.
Силовой блок стойки управления представляет собой инвертор, преобразующий однофазное судовое напряжение ~220 В, 50 Гц в постоянное напряжение 600 В для передачи его по кабель-тросу 4 на буксируемый подводный аппарат 2. Силовой блок обеспечивает набор необходимых напряжений для питания органов управления судового палубного блока. Силовой блок снабжен индикаторами включения судового напряжения и напряжения питания аппаратуры буксируемого подводного аппарата 2.
Блок электроники имеет модуль системы передачи, приема и обработки информации (системы телеметрии), обеспечивающий обмен информацией с буксируемым подводным аппаратом 2 по оптоволоконному кабелю и ее обработку.
На панели блока электроники установлен индикатор длины кабель-троса 4 от кормы судна буксировщика 1 до буксируемого подводного аппарата 2. Сигнал к панели поступает с счетчика длины, установленного на буксирном блоке судового спуско-подъемного устройства.
В судовом палубном блоке расположен системный блок персонального компьютера, монитор и клавиатура на консоли.
На выносной консоли судового палубного блока установлены две рукоятки управления (манипуляторы). Один манипулятор предназначен для управления лаговым движением буксируемого подводного аппарата 2, второй - для дистанционного управления лебедкой.
На стандартной стойке судового палубного блока предусмотрена установка откидных панелей, предназначенных для крепления дублирующих персональных компьютеров и вывода вспомогательной информации.
В состав системы ориентации и навигации входят датчики первичной информации, выполненные по технологиям микросистемной техники, а также аппаратные средства для сбора предварительной обработки информации и реализации программно-алгоритмического обеспечения для решения задач ориентации и навигации.
Датчики первичной информации включают микромеханические гироскопы, микромеханические акселерометры, микромагнитометр векторный.
Аппаратные средства включают многоканальный аналого-цифровой преобразователь и цифровой сигнальный процессор.
Основой системы ориентации и навигации является бесплатформенная микромеханическая курсовертикаль. Курсовертикаль и вычислитель образуют микромеханический инерциальный измерительный блок (МИИБ). Блок предназначен для измерения углов курса, крена и дифферента буксируемого подводного аппарата 2, составляющих векторов угловой скорости, линейного ускорения, компонент магнитного поля. В качестве чувствительных элементов используются микромеханические датчики угловой скорости линейного ускорения. Для измерения компонент магнитного поля используется магниторезистивный магнитометр. Магнитометр используется в качестве корректора МИИБ для компенсации погрешностей угловой ориентации, возникающих вследствие дрейфа микромеханических гироскопов. Аналоговые данные, поступающие с датчиков первичной информации, обрабатываются аналого-цифровым преобразователем высокой разрядности. Для реализации вычислительных алгоритмов в состав блока входит высокопроизводительный цифровой сигнальный процессор.
В качестве базовых чувствительных элементов в предлагаемом устройстве используется МИИБ, содержащий три датчика угловой скорости и три акселерометра, встроенный датчик температуры и собственный контроллер, обеспечивающий предварительную обработку сигналов гироскопов и акселерометров и выдачу ее в цифровом виде потребителям. Встроенный датчик температуры предназначен для коррекции температурных дрейфов датчиков угловой скорости и акселерометров. В качестве измерителя индукции магнитного поля используются магниторезистивные датчики. В качестве вычислителя применен цифровой сигнальный процессор Sharc ADSP21262LQFP. Параметры инерциального измерительного блока приведены в таблице.
град (при дрейфе ММГ 3.3 град/час и интервале времени между коррекциями от внешнего корректора 2 мин)
между коррекциями от внешнего корректора в режиме сканирования 2 мин)
Аппаратные средства системы управления, входящие в состав системы, обеспечивают независимое управление приводов канатов крена и курса, осуществляют измерение углов курса, крена к дифференту буксируемого подводного аппарата, измерение компонент векторов угловой скорости, линейного ускорения, магнитного поля, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Основным элементом вычислительно-управляющего модуля является микропроцессор на базе DSP-процессора, работающего под управлением встраиваемой операционной системы uCLinux.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании Faulhaber. Высокоточная цифровая система управление приводом обеспечивает высокое быстродействие, позволяет регулировать параметры приводам широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микромеханический инерциальный измерительный блок (МИИБ) определяет углы курса крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Вычислительно-управляющий модуль на основе DSP-процессора является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств системы. Процессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода. Такое построение системы позволяет решать в реальном времени сложные вычислительные задачи, большой объем оперативной памяти системы позволяет осуществлять реализацию ресурсоемких алгоритмов.
Различные компоненты системы управления и навигации подключены к вычислительно-управляющему модулю с помощью последовательных синхронных и асинхронных портов ввода-вывода. Контроллеры привода каналов управления подключены к модулю с помощью асинхронных портов ввода-вывода UART0 и UART1. С помощью данных интерфейсов контроллерам передаются команды, задающие режимы движения валов, а контроллеры в свою очередь обеспечивают модуль информацией об угловом положении валов, токах в двигателях скорости вращения.
Микромеханическая курсовертикаль в составе МИИБ подключена к вычислительному модулю с помощью синхронного последовательного порта SPORT. Вывод данных, а также управление оператором осуществляется с помощью блока, реализующего двунаправленный канал передачи данных, подключенного к вычислительно-управляющему модулю с помощью асинхронного интерфейса UART2. Все операции обмена между модулем и периферийными устройствами осуществляются с помощью использования механизмов DMA (прямого доступа к памяти), что позволяет, несмотря на интенсивность операций обмена данными, разгрузить ядро цифрового сигнального процессора.
Система управления и стабилизации буксируемого подводного аппарата по крену и курсу предназначена для задания ориентации в пространстве установленного на нем параметрического профилографа. Для управления ориентацией вокруг одной оси используется система привода, состоящая из двигателя постоянного тока с редуктором и магнитным энкодером и системы управления. Двигатель постоянного тока типа «Faulhaber» имеет конструкцию с полым ротором, что дает ряд преимуществ, таких как низкое энергопотребление, отсутствие потерь в сердечнике ротора, низкое напряжение трогания, малый момент инерции ротора, позволяющие быстрые разгон и торможение, низкие массогабаритные показатели. В составе привода использован редуктор типа «Faulhaber» в исполнении со стальными шестернями для обеспечения повышенной износоустойчивости. Магнитный энкодер IE-512 обеспечивает высокое разрешение в 512 линий на оборот, что позволяет осуществлять плавное и высокоточное управление приводом.
В цифровом контроллере MCDC3003 в качестве вычислителя используется цифровой сигнальный процессор, что позволяет осуществлять высокоточное и высокоскоростное управление (0.18° - ошибка по углу, частота работы следящего контура - 100 Гц). Цифровой контроллер привода принимает по интерфейсу UART поступающие от вычислительно-управляющего модуля команды. Режимы работы привода задаются соответствующими форматами команд, при этом используются режимы управления по угловому положению (задается и поддерживается по достижении целевое угловое положение) и управления по скорости (задается величина угловой скорости вращения вала). Для настройки параметров следящего контура контроллера пользователю предлагается ряд параметров, таких как максимальное угловое ускорение, максимальная угловая скорость, максимальный ток в двигателе пропорциональный и интегральный коэффициенты цепи обратной связи по угловой скорости, пропорциональный и дифференциальный коэффициенты цепи обратной связи по угловому положению вала. Все вышеперечисленные коэффициенты могут быть подобраны, исходя из заданного критерия оптимальности, и изменены в процессе работы для адаптации к изменившемуся режиму движения.
Для решения задач навигации буксируемого подводного аппарата 2 используются следующие варианты аппаратного обеспечения:
1. Определение координат относительно буксирующего судна 1 на основе информации о длине троса и угла, измеряемого на буксирующем судне 1 либо на буксируемом подводном аппарате с помощью курсовертикали.
2. Определение координат относительно буксирующего судна 1 на основе информации о длине троса и угловой азимутальной скорости, измеряемой с помощью датчика угловой скорости в составе курсовертикали.
3. Определение координат относительно буксирующего судна на основе информации от датчика скорости буксируемого подводного аппарата 2 и азимутального угла ориентации буксируемого подводного аппарата 2 от курсовертикали.
4. Определение координат с помощью инерциальной системы.
Аналоги параметрического профилографа приведены в кн.: Воронин В.А., Тарасов В.И., Тимошенко В.И. Гидроакустические параметрические системы. ООО «Ростиздат», Ростов-на-Дону, 2004, с.224-252.
Приемно-излучающая антенна закрыта обтекателем 15. выполненным из сферопластика ЭДС-400ТЕ. Основная задача обтекателя 15 антенны параметрического профилографа заключается в перекрытие зазора между прочным корпусом 8 буксируемого подводного аппарата 2 и антенной профилографа и может обеспечить плавный переход от плоскости антенны к обечайке корпуса.
Для проведения работ с буксируемым подводным аппаратом используются суда, имеющие возможность плавно регулировать ход в диапазоне от 2 до 10 узлов. Судно-буксировщик имеет подруливающие устройства, так как буксирная линия значительно ухудшает маневренность судна.
Судно-буксировщик оснащено спуско-подъемным устройством (СПУ), которое представляет собой «П»-образную раму, установленную на корме или кран-манипулятор, диаметрально плоскости судна установлена тяговая лебедка с усилиями, соответствующими характеру буксировки и с соответствующей емкостью барабана. Лебедка оборудуется кабелеукладчиком, скользящим токосъемником, счетчиком длины вытравленного кабель-троса 4.
СПУ оборудовано канифас-блоком с боковыми ограничивающими ролами. Боковые ролы препятствуют сходу кабель-троса 4 из ручья канифас-блока при развороте судна буксировщика 1 на новый галс или сильной боковой качке.
При производстве работ по буксировке, подводной буксируемый подводный аппарат располагают на палубе под рамой СПУ, находящейся в походном (заваленном на палубу положении). Кабель-трос закрепляется на буксируемом подводном аппарате и заводится канифас-блок. Тяговая лебедка выбирает слабину и приподнимает буксируемый подводный аппарат над палубой. Далее производится вынос «П» рамы СПУ за корму.
Судно-буксировщик 1 дает «самый малый» вперед и оператор лебедки начинает травить кабель-трос до достижения буксируемым подводным аппаратом 2 заданной глубины.
При значительном волнении при спуске и подъеме буксируемый подводный аппарат берется за оттяжки, препятствуя его раскачке с борта на борг.
При работе на больших скоростях для достижения требуемых глубин применяется гидродинамический заглубитель 3, который устанавливается на кабель-трос 4 в 60-70 метрах от буксируемого подводного аппарата 2.
Установка гидродинамического заглубителя 3 заключается в следующем:
- опустив буксируемый подводный аппарат на 50-70 метров, судовая лебедка останавливается, кабель-трос 4 фиксируется клиновым зажимом, после чего лебедка дает слабину палубной части кабель-троса 4;
- гидродинамический заглубитель 3 устанавливается на палубе, свободная часть кабель-троса 4 заводится в ложемент гидродинамического заглубителя 3 и фиксируется на нем наложенными захватами;
- СПУ поднимает гидродинамический заглубитель 3, лебедка выбирает слабину так, чтобы можно было освободить клиновый зажим;
- СПУ выносит гидродинамический заглубитель 3 за корму, при этом лебедка выпускает кабель-трос 4, давая возможность «П»-образной раме вынести гидродинамический заглубитель 3. Как только гидродинамический заглубитель 3 оказывается за бортом, оператор лебедки набивает трос, снимая нагрузку с крана. После этого, глаголь-гак освобождает подъемный трос, на котором опускается гидродинамический заглубитель 3. СПУ становится в исходное положение, и оператор лебедки начинает опускание всей системы до рабочей глубины.
Подъем гидродинамического заглубителя 3 и буксируемого подводного аппарата 2 происходит в обратной последовательности.
Если на судне нет кормовой «П»-образной рамы, то буксирование можно осуществлять с борта, вешая канифас-блок на «выстрел». В этом случае буксируемый подводный аппарат 2 выносят за борт и опускают в воду бортовым краном на спусковом тросе с глаголь-гаком. После спуска буксируемого подводного аппарата 2 в воду кабель-трос 4 заводится в буксировочный канифас-блок, посредством лебедки выбирает слабину, снимая нагрузку со спускового троса. Раскрывается глаголь-гак, освобождая буксируемый подводный аппарат 2 от спускового троса. Во всех случаях на судне должна быть кабельная лебедка с токосъемником, при этом весь такелаж должен иметь радиусы изгиба не менее 20 диаметров кабель-троса 4.
При проведении испытаний заявляемого технического решения (буксируемый подводный аппарат) были получены различные положения «чистого» кабель-троса 4, которые он занимает в водном потоке при движении судна-буксировщика 1 со скоростями от 0,5 до 4,1 м/сек. При штатной строительной длине кабель-троса 4, равной 1000 м, буксируемый подводный аппарат 2 достигает заданной рабочей глубины в 350 м только до скорости 3 уз. (1,5 м/сек).
Для расширения диапазона скоростей буксирования введен гидродинамический заглубитель 3, а буксируемый подводный аппарат снабжен горизонтальным заглубляющим крылом 11.
Выполнение прочного корпуса со сферическими крышками оптимально по своим гидродинамическим свойствам, удобно с точки зрения монтажа и обслуживания оборудования, экономично по затратам материала и технологии изготовления. Стабилизатор, горизонтальное крыло, вертикальные крылья и гидродинамический заглубитель обеспечивают устойчивость, управляемость буксируемого подводного аппарата. При этом достигаются следующие технические характеристики:
- диапазон рабочих глубин от 0 до 350 м,
- скорость буксировки при профилировании от 0,5 до 4,1 м/с (от 1 до 8,2 уз.).
- буксируемый подводный аппарат при движении обеспечивает стабилизацию по крену и дифференту, максимальные углы отклонения по крену и дифференту не превышают 5°±3°,
- буксирный кабель-трос выдерживает максимальное усилие 42 кН с разрывным усилием 70-90 кН,
- буксируемый подводный аппарат способен совершать поперечные перемещения при движении судна-буксировщика прямым курсом,
- масса полезной нагрузки буксируемого устройства не менее 30 кг,
- масса буксируемого устройства без аппаратуры профилографа не более 60 кг,
- электропитание от судовой сети однофазным переменным током напряжением 220 В±10% и частотой 50 Гц±10%,
- аппаратура буксируемого устройства обеспечивает возможность непрерывной работы в течение 72 часов.
Результаты испытаний предлагаемого буксируемого подводного аппарата 2 показали (фиг.3), что необходимая длина кабель-троса 4 для достижения рабочей глубины 350 м колеблется от 500 до 2200 м при изменении скорости от 3 до 8.2 уз.
При фиксированной длине кабель-троса 1000 м буксируемый подводный аппарат может достигать рабочей глубины 350 м до скоростей около 5 уз. (2,5 м/сек). При больших скоростях ПБУ начнет «всплывать». Так при скорости буксирования 8,2 уз. (4.1 м/сек), буксируемый подводный аппарат может опуститься до глубины около 200 м.
Предлагаемый буксируемый подводный аппарат предназначен для установки многолучевого параметрического профилографа, работающего на принципах нелинейной параметрической акустики для обследования трубопроводов и других заиленных объектов природного и техногенного происхождения. Получаемая информация в режиме реального времени обрабатывается и передается на борт судна-буксировщика 2.
Предлагаемый буксируемый подводный аппарат способен производить поперечные горизонтальные перемещения при движении судна-буксировщика прямым курсом, что увеличивает зону обследования и производительность буксируемой системы. В зависимости от заданного режима гидроакустической съемки он способен перемещаться на различных расстояниях от морского дна. Предлагаемый буксируемый подводный аппарат, в отличие от известных аналогичных устройств, имеет широкий диапазон скоростей буксировки (до 8,2 узлов).
Предлагаемое устройство должно найти широкое применение при решении задач развития техники гидроакустических систем обследования подводной обстановки позиционирования подводных объектов, мониторинга дна и состояния трубопроводов, а также проведения водолазных работ. В отличие от существующих систем, создаваемое устройство для зондирования морского дна способно совершать поперечные перемещения при движении судна буксировщика прямым курсом в широком диапазоне скоростей буксировки.
Промышленная реализация заявляемого технического решения сложности не представляет, что позволяет сделать вывод о соответствии заявляемого технического предложения условию патентоспособности «промышленная применимость».
Источники информации
1. В.А.Воронин, С.П.Тарасов, В.И.Тимощенко. Гидроакустические параметрические системы. Ростов-на-Дону. ООО Ростиздат. 2004, с.257.
2. Авторское свидетельство СССР №1308040.
3. Авторское свидетельство СССР №1360405.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ТЕРМОЗОНД ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВОДЫ | 2012 |
|
RU2513635C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Буксируемый подводный аппарат | 2022 |
|
RU2795071C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2014 |
|
RU2563316C1 |
Изобретение относится к области производства подводных работ с использованием буксируемых подводных аппаратов, преимущественно оснащенных гидроакустической измерительной аппаратурой. Буксируемый подводный аппарат выполнен в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, оснащен параметрическим профилографом с цветным индикатором и вычислительно-управляющим модулем и соединен с судном-буксировщиком кабель-тросом. Аппарат снабжен заглубляющим устройством, в котором стабилизатор состоит из четырех плоскостей, образующих х-образную конструкцию. Заглубляющее устройство установлено в средней части цилиндрического корпуса на верхней его поверхности и выполнено в виде горизонтального заглубляющего крыла, которое сочленено с вертикальными симметричными крыльями, выполненными в виде элерона. На верхней плоскости горизонтального заглубляющего крыла установлено приспособление для крепления кабель-троса, выполненное в виде силовой гребенки. Кабель-трос снабжен гидродинамическим заглубителем, выполненным из профильных пластин, изогнутых по дуге круга и установленных между боковинами. Цилиндрический корпус аппарата опирается на раму, выполненную из труб в виде салазок, которые соединены с носовой частью корпуса посредством двух наклонных плоских листов, а с кормовой частью - посредством двух нижних элементов стабилизатора. Аппарат снабжен системой ориентации и навигации. Обеспечивается повышение точности ориентации буксируемого аппарата. 1 табл., 3 ил.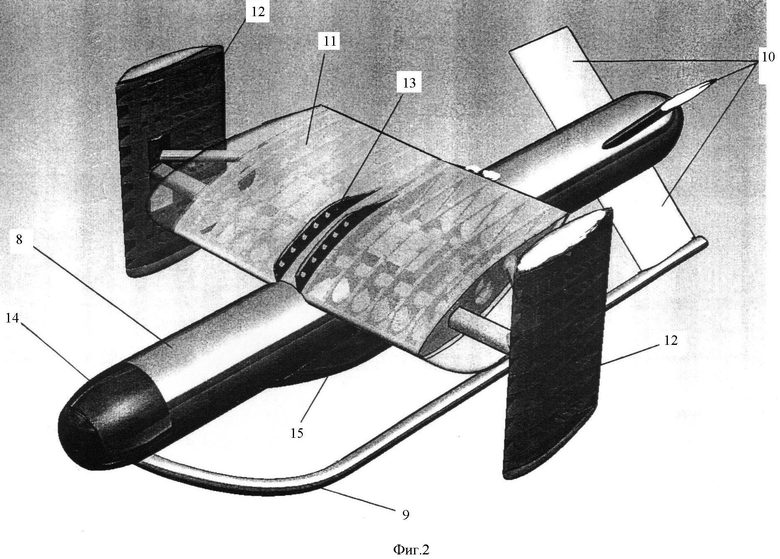
Буксируемый подводный аппарат, выполненный в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, снабженный заглубляющим устройством, оснащенный параметрическим профилографом с цветным индикатором и вычислительно-управляющим модулем, и соединенным с судном-буксировщиком кабель-тросом, отличающийся тем, что стабилизатор состоит из четырех плоскостей, образующих х-образную конструкцию, заглубляющее устройство установлено в средней части цилиндрического корпуса на верхней его поверхности и выполнено в виде горизонтального заглубляющего крыла, которое сочленено с вертикальными симметричными крыльями, выполненными в виде элерона, на верхней плоскости горизонтального заглубляющего крыла установлено приспособление для крепления кабель-троса, выполненное в виде силовой гребенки, кабель-трос снабжен гидродинамическим заглубителем, выполненным из профильных пластин, изогнутых по дуге круга и установленных между боковинами, цилиндрический корпус опирается на раму, выполненную из труб в виде салазок, которые соединены с цилиндрическим корпусом в его носовой части посредством двух наклонных плоских листов, а в кормовой части посредством двух нижних элементов стабилизатора, буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из микромеханических гироскопов и акселерометров, векторного магнитометра, многоканального аналого-цифрового преобразователя и цифрового сигнального процессора, информационно соединенного с бортовой аппаратурой управления судна - буксировщика и вычислительно-управляющего модуля.
| ВОРОНИН В.В | |||
| и др | |||
| Гидроакустические параметрические системы | |||
| - Ростов-на-Дону: ООО Ростиздат, 2004, с.257 | |||
| JP 58170299 U, 14.11.1983 | |||
| US 4019453 А, 26.04.1977 | |||
| US 4027616 А, 07.06.1977 | |||
| Устройство для автоматического регулирования глубины погружения буксируемого в воде объекта | 1978 |
|
SU938755A3 |

