Настоящее изобретение относится к двигателю, имеющему нагнетатель.
Традиционно используется широко известный двигатель, имеющий турбонагнетатель. Турбонагнетатель является нагнетателем, турбина которого вращается энергией выхлопа, а нагнетание выполняется всасываемым воздухом посредством компрессора. Когда компрессор находится в состоянии помпажа, турбонагнетатель использоваться не может. Состояние помпажа может обнаруживаться турбодатчиком, датчиком давления нагнетания, λ-датчиком или т.п. Например, что касается двигателя, раскрытого в публикации выложенной заявки на патент Японии №2003-240788, то состояние помпажа обнаруживается датчиком расхода воздуха.
Однако датчик расхода воздуха или λ-датчика является невыгодным, так как он является дорогостоящим. Датчик расхода воздуха или Х-датчик также невыгоден, так как трудно достоверно избежать состояния помпажа в горной местности, в которой давление воздуха отличается от давления воздуха в равнинной местности. Двигатель, раскрытый в публикации выложенной заявки на патент Японии №2003-240788, является преимущественным, так как сигналы, реагирующие на изменение давления, наблюдаются постоянно, тем самым увеличивая вычислительную нагрузку на блок управления двигателем (БУД).
Задачей настоящего изобретения является создание двигателя, обеспечивающего возможность постоянного определения частоты вращения нагнетателя с пониженной вычислительной нагрузкой.
Двигатель согласно первому объекту настоящего изобретения содержит: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель; средство определения частоты вращения двигателя; средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала; операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и средство управления, которое оценивает состояние помпажа нагнетателя, при этом средство управления устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета поделенных импульсных сигналов, выдает поделенный импульсный сигнал, отсчитанный на заданное количество от временной привязки начала отсчета, в качестве первого выходного сигнала и оценивает, что, если разность между первыми выходными сигналами каждого цилиндра является не меньшей, чем заданное значение, нагнетатель находится в состоянии помпажа.
Двигатель согласно второму объекту настоящего изобретения содержит: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель; средство определения частоты вращения двигателя; средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала/операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и средство управления, которое регулирует количество впрыска топлива, при этом средство управления устанавливает импульсный сигнал, поделенный на заданный коэффициент деления, в качестве первого поделенного импульсного сигнала, устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета поделенных импульсных сигналов, выдает поделенный импульсный сигнал, отсчитанный от временной привязки начала отсчета поделенных импульсных сигналов на заданное количество, в качестве первого выходного сигнала, выдает второй поделенный импульсный сигнал, поделенный на больший коэффициент деления, чем первый поделенный импульсный сигнал, в качестве второго выходного сигнала, оценивает цилиндр, у которого разность между первым выходным сигналом и вторым выходным сигналом, цилиндром несоответствия количества впрыска топлива, и регулирует количество впрыска топлива у цилиндра несоответствия количества впрыска топлива, с тем чтобы сделать разность не большей, чем заданное значение.
Двигатель согласно третьему объекту настоящего изобретения содержит: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель; средство определения частоты вращения двигателя/средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала; операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и средство управления, которое оценивает, является или нет двигатель нештатным, и регулирует количество впрыска топлива, с тем чтобы уменьшить частоту вращения двигателя, когда двигатель оценивается нештатным, при этом когда двигатель оценен нештатным, средство управления устанавливает импульсный сигнал, поделенный на заданный коэффициент деления, в качестве первого поделенного импульсного сигнала, устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета поделенных импульсных сигналов, выдает поделенный импульсный сигнал, отсчитанный от временной привязки начала отсчета на заданное количество, в качестве первого выходного сигнала, выдает второй поделенный импульсный сигнал, поделенный на больший коэффициент деления, чем первый поделенный импульсный сигнал, в качестве второго выходного сигнала, и регулирует количество впрыска топлива, с тем чтобы установить второй выходной сигнал в согласовании с минимальным выходным сигналом из первых выходных сигналов в одном цикле.
Двигатель согласно настоящему изобретению позволяет постоянно определять количество оборотов нагнетателя с пониженной вычислительной нагрузкой.
Далее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - схематичный чертеж двигателя согласно варианту осуществления настоящего изобретения;
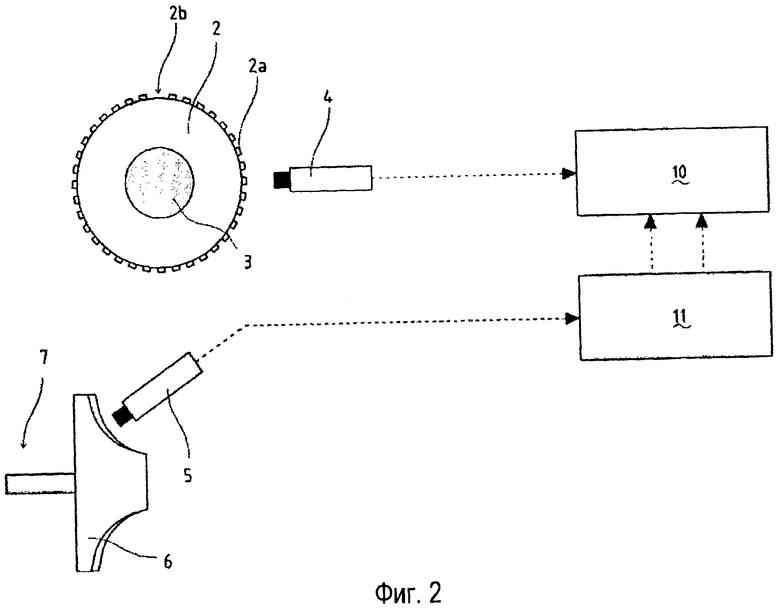
фиг.2 - схематичный чертеж датчика угла поворота коленчатого вала и турбодатчика;
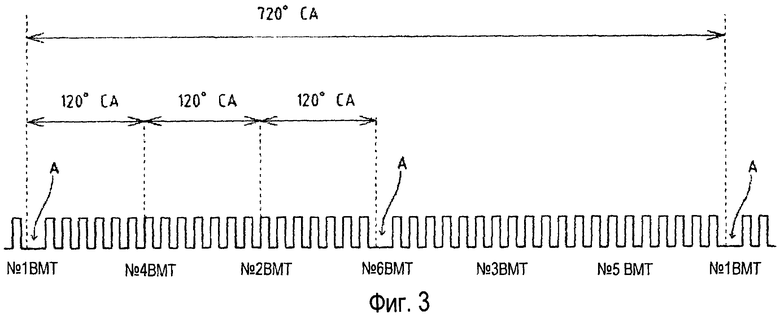
фиг.3 - график импульсного выходного сигнала во временном ряду вращения двигателя;
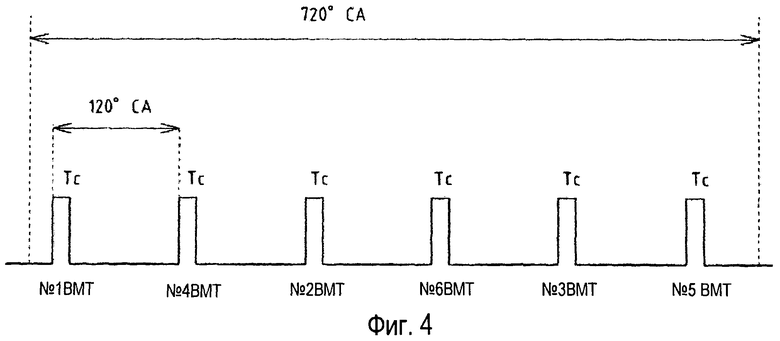
фиг.4 - график временной привязки приведения в действие;
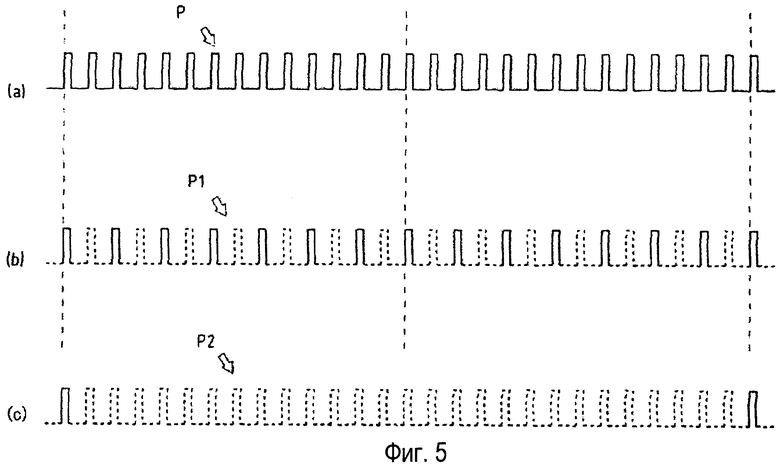
фиг.5 - график поделенного импульсного сигнала вращения нагнетателя;
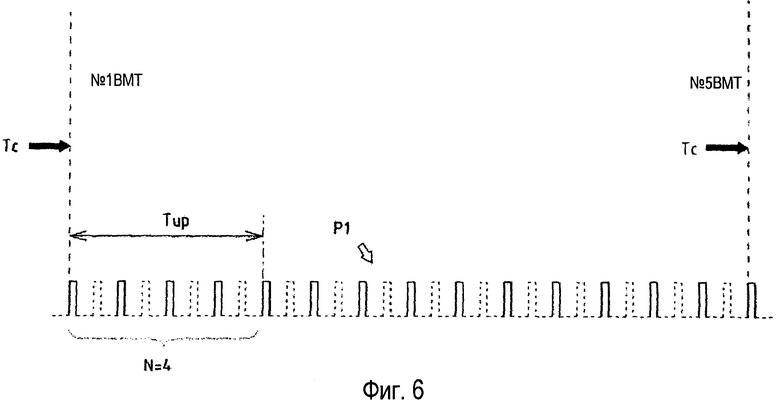
фиг.6 - график первых выходных сигналов;
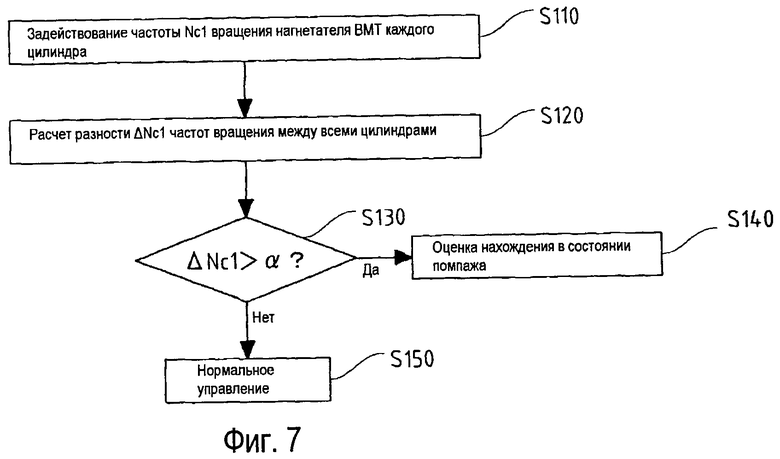
фиг.7 - блок-схема последовательности операций способа управления оценкой помпажа, который является вариантом 1 осуществления изобретения;
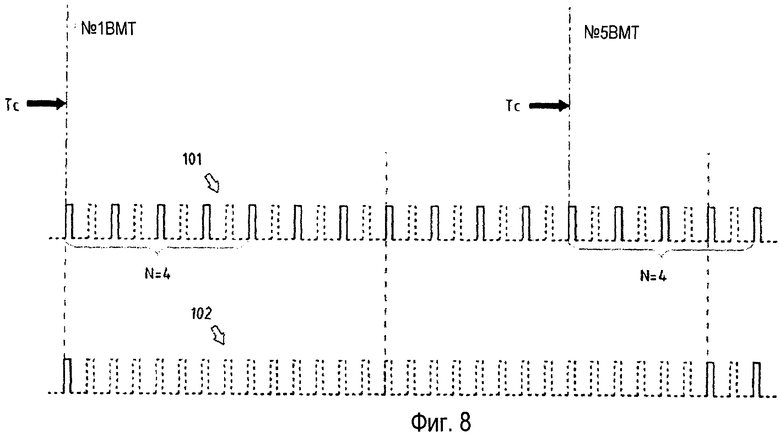
фиг.8 - график первых выходных сигналов и вторых выходных сигналов;
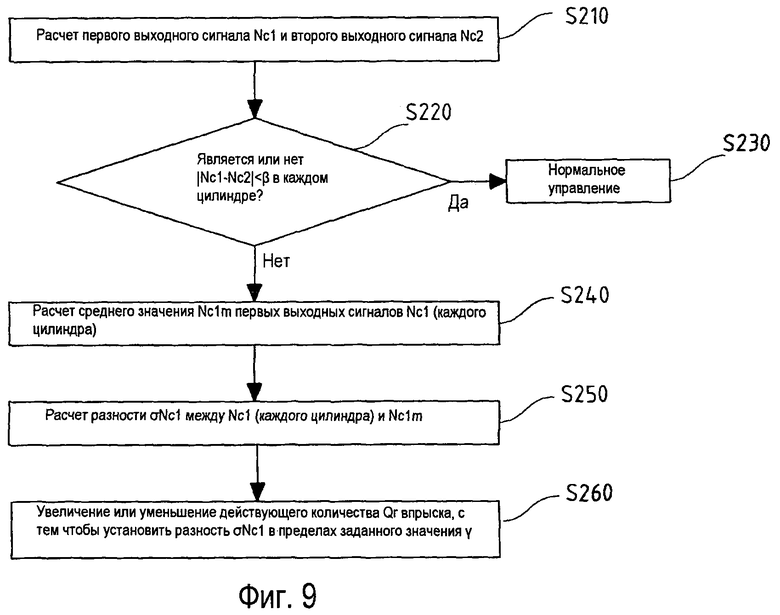
фиг.9 - блок-схема последовательности операций способа первого управления компенсацией количества впрыска топлива, который является вариантом 2 осуществления изобретения;
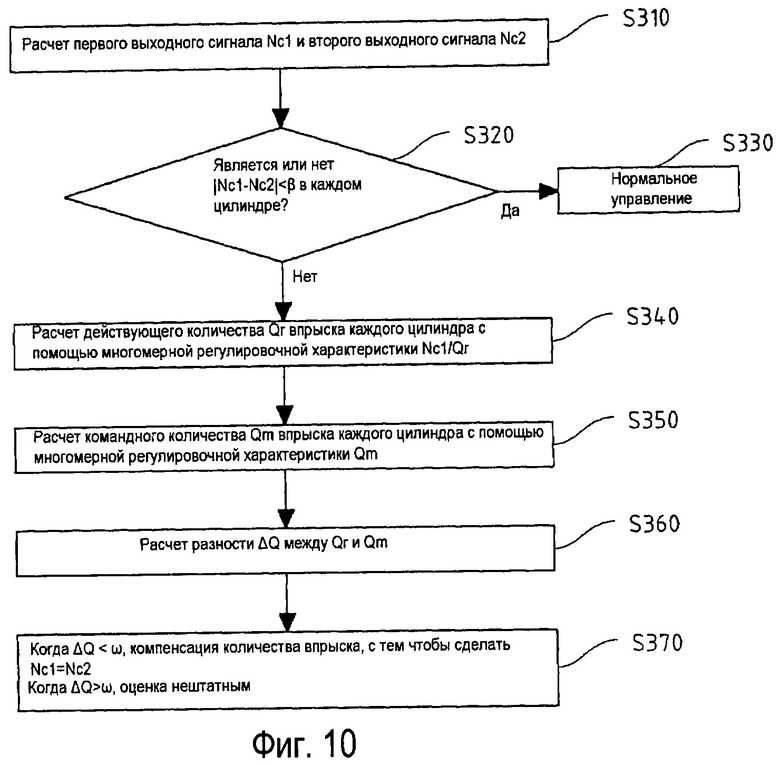
фиг.10 - блок-схема последовательности операций способа второго управления компенсацией количества впрыска топлива, который является вариантом 3 осуществления изобретения;
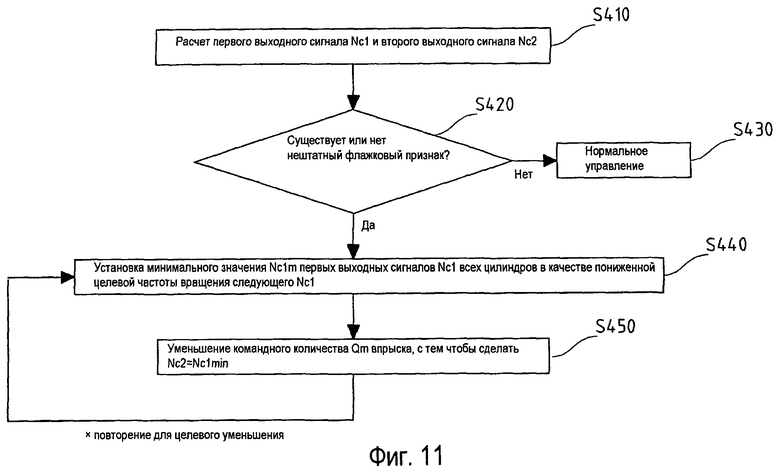
фиг.11 - блок-схема последовательности операций способа управления дефорсированием, который является вариантом 4 осуществления изобретения; и
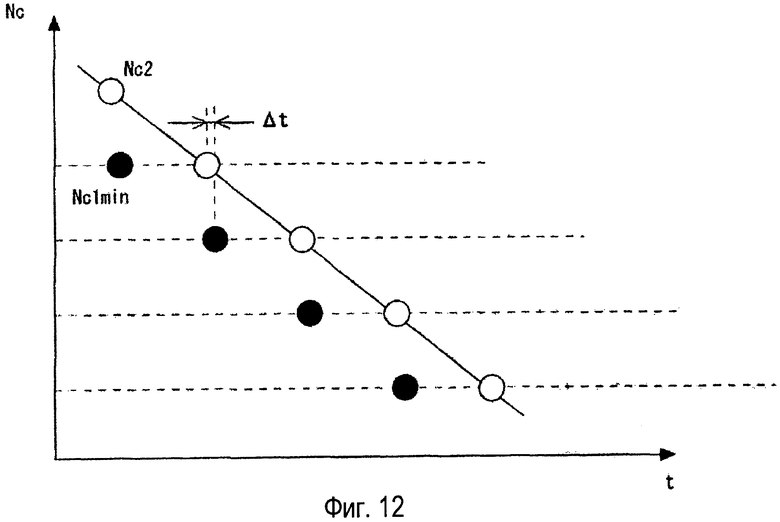
фиг.12 - график перехода управления дефорсированием.
Далее будет приведено описание двигателя 1, который является вариантом осуществления настоящего изобретения, со ссылкой на фиг.1. Двигатель 1 имеет базовую деталь 8 двигателя, датчик 4 угла поворота коленчатого вала в качестве средства определения частоты вращения двигателя, усилитель 11 в качестве операционного средства, турбодатчик 5 в качестве средства определения частоты вращения нагнетателя и блок 10 управления двигателем (БУД) в качестве средства управления.
Базовая деталь 8 двигателя является 6-цилиндровым дизельным двигателем, имеющим турбонагнетатель 7 в качестве нагнетателя. Базовая деталь 8 двигателя имеет блок 20 цилиндров и головку 21 блока цилиндров. В головке 21 блока цилиндров впускной коллектор присоединен к впускному тракту через компрессор 6 и воздухоочиститель 22 турбонагнетателя 7, а выпускной коллектор присоединен к выпускному тракту через турбину и глушитель 23 турбонагнетателя 7.
Коленчатый вал 3 с возможностью поворота поддерживается в блоке 20 цилиндров. Пульсатор 2 закреплен на коленчатом валу 3, и датчик 4 угла поворота коленчатого вала скомпонован противоположно пульсатору 2.
Пояснение будет дано по конструкции датчика 4 угла поворота коленчатого вала и турбодатчика 5 со ссылкой на фиг.2.
Датчик 4 угла поворота коленчатого вала скомпонован противоположно пульсатору 2. Пульсатор 2 является угловым диском, прикрепленным к коленчатому валу 3, и вращается как целая часть с коленчатым валом 3. Импульсы 2а сформированы на периметре пульсатора 2 с регулярными интервалами, так что пульсатор 2 сконструирован подобным шестерне. Импульсы 2а формируются при 60PLS/оборот. Пропуск 2b импульсов сформирован в пульсаторе 2. В этом варианте осуществления количество импульсов не ограничено.
Согласно этой конструкции датчик 4 угла поворота коленчатого вала определяет неравномерность пульсатора 2. Выходной сигнал рассматривается в качестве импульсного сигнала, и угол поворота коленчатого вала 3 определяется подсчетом количества импульсов 2а от пропуска 2b в качестве точки отсчета. Положение поршня каждого цилиндра (верхняя мертвая точка (ВМТ), нижняя мертвая точка (НМТ) и т.п.) может определяться по углу поворота коленчатого вала 3. Датчик с электромагнитным считывателем или датчик Холла используется в качестве датчика 4 угла поворота коленчатого вала. Однако в этом варианте осуществления тип датчика не ограничен, и датчик расстояния, оптический датчик, электростатический датчик или т.п. могут использоваться в качестве альтернативы.
Турбодатчик 5 скомпонован на стороне компрессора 6 в турбонагнетателе 7. Турбодатчик 5 обнаруживает указатель, предусмотренный на лопастях компрессора 6. Количество лопастей компрессора 6 составляет четырнадцать. Однако в этом варианте осуществления количество лопастей может быть неограниченным. Средство, обнаруживающее указатель, предусмотренный на лопастях, не ограничено и, в качестве альтернативы, может быть магнитным датчиком, электростатическим датчиком или тому подобным.
БУД 10 является контроллером, искусственно выполняющим электрическое управление для приведения в действие двигателя 1. Датчик 4 угла поворота коленчатого вала и турбодатчик 5 через усилитель 11 присоединены к БУД 10.
Пояснение будет дано по импульсному выходному сигналу, определенному датчиком 4 угла поворота коленчатого вала, со ссылкой на фиг.3. Фиг.3 показывает изменение временного ряда импульсного выходного сигнала у вращения двигателя. Что касается двигателя 8, все цилиндры (с №1 по №6) выполняют работу, с тем чтобы вращать коленчатый вал 3, то есть пульсатор 2 дважды. Очередностью впрыска является №1, №4, №2, №6, №3 и затем №5.
Согласно этой конструкции неравномерность пульсатора 2 определяется датчиком 4 угла поворота коленчатого вала, а затем передается в БУД 10 в качестве импульсного выходного сигнала. В импульсном выходном сигнале пропуск 2b пульсатора 2 формирует одну точку, в которой импульсный сигнал не выдается за один цикл (А на фиг.3).
Пояснение будет дано по временной привязке начала отсчета поделенных импульсных сигналов со ссылкой на фиг.4. В пульсаторе 2, посредством расчета временной привязки с интервалами в 120° от А, может рассчитываться предписанное положение, общее для каждого из цилиндров. Посредством компенсации предписанного положения расчетом могут рассчитываться ВМТ и НМТ и тому подобное. «Временная привязка начала отсчета поделенного импульсного сигнала» определена в качестве положения верхней мертвой точки произвольного цилиндра (№N) независимо от нумерации цилиндров. Положение верхней мертвой точки каждого из цилиндров при вращении коленчатого вала 3 указывается ссылкой как временная привязка начала отсчета поделенного импульсного сигнала Tc и используется для измерения частоты вращения нагнетателя у турбонагнетателя 7. Временная привязка начала отсчета поделенного импульсного сигнала Tc не должна ограничиваться верхней мертвой точкой.
Пояснение будет дано по коэффициенту деления со ссылкой на фиг.5. «Деление с коэффициентом N деления» означает изменение частоты на 1/N. В этом случае частотой импульсов является 14, с тем чтобы выдавать 14 импульсов за 1/6 оборота компрессора. Деление частоты импульсов с коэффициентом 7 деления означает изменение частоты в 1/7 раза, поэтому частота заменяется на 2. Коэффициент деления устанавливается, с тем чтобы быть оптимизированной по частотной реакции БУД 10 и разрешению в случае преобразования в бит.Коэффициент деления, в качестве альтернативы, может быть простым числом, таким как 19 или 7.
Фиг.5(а) показывает импульсный выходной сигнал Р турбодатчика 5. 14 импульсов выдаются за 1/6 оборота компрессора. А именно импульсный выходной сигнал Р является импульсным сигналом, поделенным с коэффициентом 1 деления, и может рассматриваться в качестве непосредственно измеренного импульсного выходного сигнала.
Фиг.5(b) показывает первые импульсные выходные сигналы Р1, которые являются импульсным выходным сигналом Р, поделенным с коэффициентом 2 деления. 7 импульсов выдаются за 1/6 оборота компрессора.
Фиг.5(с) показывает вторые импульсные выходные сигналы Р2, которые являются импульсным выходным сигналом Р, поделенным с коэффициентом 28 деления. 1 импульс выдается за 2/6 оборота компрессора.
Соответственно, импульсный выходной сигнал нагнетателя передается в качестве поделенного импульсного сигнала в БУД 10, так что непрерывная нагрузка не прикладывается к БУД 10.
Пояснение будет дано по первым выходным сигналам, выдаваемым посредством БУД 10, со ссылкой на фиг.6. Время для отсчитывания предписанного количества N раз первого импульсного выходного сигнала Р1 (поделенного импульсного сигнала, поделенного с коэффициентом 2 деления) от положения верхней мертвой токи каждого из цилиндров в качестве временной привязки начала отсчета поделенного импульсного сигнала Tc (жирная черная стрелка на фиг.6, подобно более поздним чертежам) (время Тuр измерения счетчика) задействуется, с тем чтобы управлять частотой вращения нагнетателя. В этом случае предписанное количество N может устанавливаться произвольно. В этом варианте осуществления предписанным количеством N является 4. А именно первый выходной сигнал является частотой вращения нагнетателя двигателя 1 непосредственно после верхней мертвой точки, задействованной в некоторый момент. В дальнейшем первый выходной сигнал определен в качестве частоты Nc1 вращения нагнетателя.
Соответственно, первый выходной сигнал Nc1 является периодически задействованной временной привязкой начала отсчета поделенного импульсного сигнала Tc на основании произвольного коэффициента деления и угла поворота коленчатого вала, в соответствии с чем может быть получена частота Nc вращения нагнетателя каждого из цилиндров. А именно без прикладывания операционной нагрузки к БУД 10 может измеряться частота вращения нагнетателя цикла сгорания для каждого цикла и каждого цилиндра, и, в свою очередь, может определяться состояние сгорания двигателя 1, в том числе состояние турбонагнетателя 7.
Пояснение будет дано по вторым выходным сигналам, выдаваемым посредством БУД 10 (см. фиг.5(с)). БУД 10 задействует второй импульсный выходной сигнал Р2 в качестве количества импульсов за 1/6 оборота компрессора и рассматривает его в качестве частоты вращения нагнетателя. А именно второй выходной сигнал является частотой вращения нагнетателя, задействованной в среднем. В дальнейшем второй выходной сигнал определен в качестве частоты Nc2 вращения нагнетателя.
Соответственно, второй выходной сигнал Nc2 делится и задействуется с произвольным коэффициентом деления (28 в этом варианте осуществления), посредством чего может быть получено среднее значение частоты вращения нагнетателя. А именно без прикладывания операционной нагрузки к БУД 10 может измеряться средняя частота вращения нагнетателя, которая не находится под влиянием микроскопических факторов, таких как изменение цикла сгорания и переключение между цилиндрами, и, в свою очередь, может определяться состояние сгорания двигателя 1, в том числе состояние турбонагнетателя 7.
Вариант 1 осуществления изобретения
Пояснение будет приведено по управлению оценкой помпажа, которое является вариантом 1 осуществления, со ссылкой на фиг.7. БУД 10 сравнивает первые выходные сигналы Nc1 всех цилиндров с каждым другим, с тем чтобы оценивать, находится или нет турбонагнетатель в состоянии помпажа.
БУД 10 задействует первый выходной сигнал Nc1 каждого из цилиндров (S110). Затем БУД 10 задействует разность ΔNc1 частот вращения между всеми цилиндрами (S120). Затем БУД 10 оценивает, является или нет разность ΔNc1 частот вращения большей, чем предписанное значение (S130). Когда разность ΔNc1 частот вращения между всеми цилиндрами является не меньшей, чем предписанное значение α, БУД 10 оценивает, что турбонагнетатель 7 находится в состоянии помпажа (S140). С другой стороны, каждая разность ΔNc1 частот вращения является не большей, чем предписанное значение α, БУД 10 выполняет нормальное управление (S150).
Соответственно, первые выходные сигналы Nc1 в качестве периодической частоты вращения нагнетателя всех цилиндров сравниваются друг с другом в качестве значения обратной связи, в соответствии с этим даже состояние легкого помпажа, которое является трудным для оценки датчиком давления нагнетателя или тому подобным, может безошибочно определяться, не прикладывая операционной нагрузки к БУД 10. А именно без использования дорогостоящего датчика давления нагнетателя, датчика расхода воздуха или т.п. состояние помпажа может безошибочно и быстро определяться только турбодатчиком 5.
Пояснение будет дано по сравнению первого выходного сигнала Nc1 со вторым выходным сигналом Nc2 со ссылкой на фиг.8. Первый выходной сигнал Nc1 является частотой вращения нагнетателя, задействованной от временной привязки начала отсчета поделенного импульсного сигнала Тс в положении верхней мертвой точки каждого из цилиндров двигателя 1 до момента времени, в который первый импульсный выходной сигнал Р1, поделенный с коэффициентом 2 деления был измерен четыре раза. С другой стороны, второй выходной сигнал Nc2 является частотой вращения нагнетателя, с которой задействуется второй импульсный выходной сигнал Р2, поделенный с коэффициентом 28 деления.
Соответственно, хотя выходных сигналов в качестве частоты вращения нагнетателя два (первый выходной сигнал Nc1 и второй выходной сигнал Nc2), используется один турбодатчик, тем самым уменьшая количество деталей двигателя 1. Два выходных сигнала могут сравниваться друг с другом, не учитывая погрешность одиночного датчика. Даже если одна из систем вывода является аномальной, частота вращения нагнетателя может определяться достоверно.
Коэффициент деления первого выходного сигнала Nc1 устанавливается небольшим (в этом варианте осуществления коэффициентом деления является 2), с тем чтобы получать функцию, определяющую частоту вращения нагнетателя периодически в некоторый момент, а коэффициент деления второго выходного сигнала Nc2 установлен большим (в этом варианте осуществления коэффициентом деления является 28), с тем чтобы получать функцию, определяющую среднюю частоту вращения нагнетателя, в соответствии с чем состояние нагнетателя может определяться без прикладывания операционной нагрузки к БУД 10.
Вариант 2 осуществления изобретения
Пояснение будет приведено по первому управлению компенсацией количества впрыска топлива, которое является вариантом 2 осуществления, со ссылкой на фиг.9. БУД 10 определяет разброс количества впрыска топлива среди всех цилиндров и компенсирует разброс с помощью первого выходного сигнала Nc1 и второго выходного сигнала Nc2.
БУД 10 рассчитывает первый выходной сигнал Nc1 и второй выходной сигнал Nc2 (3210). Затем БУД 10 проверяет, является или нет первый выходной сигнал Nc1 большим, чем разность между вторым выходным сигналом Nc2 и заданным значением β, и меньшим, чем второй выходной сигнал Nc2 (S220). Когда условие этапа S220 удовлетворено, БУД 10 выполняет нормальное управление (S230).
С другой стороны, когда условие этапа S220 не удовлетворено, БУД 10 рассчитывает среднее значение Nc1m первых выходных сигналов Nc1 всех цилиндров (S240). Затем БУД 10 рассчитывает σNc1, которое является разностью между первым выходным сигналом Nc1 каждого из цилиндров и средним значением Nc1m (S250). БУД 10 увеличивает или уменьшает действующее количество Qr впрыска каждого из цилиндров, с тем чтобы заставлять σNc1, которое является разностью между первыми выходными сигналами Nc1 всех цилиндров, сходиться к заданному значению γ (S260).
Согласно конструкции на этапе S220 может оцениваться мгновенная частота вращения нагнетателя в момент времени впрыска топлива каждого из цилиндров по отношению к средней частоте вращения нагнетателя. На этапе S240 первый выходной сигнал Nc1, который является мгновенной частотой вращения нагнетателя каждого из цилиндров, сводится в одну точку, с тем чтобы подавлять разброс количества впрыска топлива каждого из цилиндров.
Соответственно, два выходных сигнала частоты вращения нагнетателя (первый выходной сигнал Nc1 и второй выходной сигнал Nc2) сравниваются друг с другом в качестве значения обратной связи, в соответствии с чем разброс количества впрыска топлива каждого из цилиндров может уменьшаться без прикладывания операционной нагрузки к БУД 10.
Вариант 3 осуществления изобретения
Пояснение будет приведено по второму управлению компенсацией количества впрыска топлива, которое является вариантом 3 осуществления изобретения, со ссылкой на фиг.10. БУД 10 обнаруживает нештатность двигателя с помощью первого выходного сигнала Nc1 и второго выходного сигнала Nc2 и определяет разобщенность количества впрыска топлива каждого из цилиндров на основании многомерной регулировочной характеристики впрыска двигателя, а затем оценивает, должна ли выполняться компенсация или нештатная обработка.
БУД 10 рассчитывает первый выходной сигнал Nc1 и второй выходной сигнал Nc2 (S310). Затем БУД 10 проверяет, является или нет первый выходной сигнал Nc1 большим, чем разность между вторым выходным сигналом Nc2 и заданным значением Р, и меньшим, чем второй выходной сигнал Nc2 (S320). Когда условие этапа S320 удовлетворено, БУД 10 выполняет нормальное управление (S330). Вышеприведенные этапы подобны этапам первого управления компенсацией количеством впрыска топлива.
С другой стороны, когда условие этапа S320 не удовлетворено, БУД 10 рассчитывает действующее количество Qr впрыска каждого из цилиндров с помощью многомерной регулировочной характеристики Nc1/Qr, которая показывает корреляцию между первым выходным сигналом Nc1 и действующим количеством Qr впрыска (S340). Затем БУД 10 рассчитывает командное количество Qm впрыска с помощью многомерной регулировочной характеристики командного количества впрыска, которая рассчитывает командное количество Qm впрыска по частоте вращения двигателя и открыванию дроссельной заслонки (S350). Затем БУД 10 рассчитывает разность ΔQ количеств впрыска между действующим количеством Qr впрыска и командным количеством Qm впрыска (S360). Когда разность ΔQ количеств впрыска является меньшей, чем заданное значение ω, количество впрыска компенсируется, с тем чтобы установить первый выходной сигнал Nc1 в согласовании со вторым выходным сигналом Nc2 (S370). С другой стороны, когда разность ΔQ количества впрыска является большей, чем заданное значение, двигатель оценивается нештатным и устанавливается нештатный флажковый признак (S370).
Согласно конструкции на этапе S320 может оцениваться мгновенная частота вращения нагнетателя в момент времени впрыска топлива каждого из цилиндров по отношению к средней частоте вращения нагнетателя. На этапе S360 может проверяться величина разрыва от командного количества Qm впрыска.
Соответственно, два выходных сигнала частоты вращения нагнетателя (первый выходной сигнал Nc1 и второй выходной сигнал Nc2) сравниваются друг с другом в качестве значения обратной связи, в соответствии с чем является ли количество впрыска топлива компенсируемым, или двигатель является нештатным, может оцениваться без прикладывания операционной нагрузки к БУД 10.
Вариант 4 осуществления изобретения
Пояснение будет приведено по управлению дефорсированием, которое является вариантом 4 осуществления, со ссылкой на фиг.11. Когда возникает нештатная ситуация в двигателе 1, БУД 10 уменьшает частоту вращения двигателя 1 с помощью первого выходного сигнала Nc1 и второго выходного сигнала Nc2 по шагам во время дефорсирования.
БУД 10 рассчитывает первый выходной сигнал Nc1 и второй выходной сигнал Nc2 (410). Затем БУД 10 проверяет, существует или нет какой-нибудь нештатный флажковый признак (например, этап S370 во втором управлении компенсацией количества впрыска топлива) (S420). Когда никакого нештатного флажкового признака не существует, выполняется нормальное приведение в действие (S430).
С другой стороны, когда какой-нибудь нештатный флажковый признак существует, минимальное значение Nc1min первых выходных сигналов Nc1 всех цилиндров устанавливается в качестве пониженной целевой частоты вращения (S440). Затем БУД 10 уменьшает командное количество Qm впрыска, с тем чтобы установить второй выходной сигнал Nc2 в согласовании с минимальным значением Nc1min (S450). БУД повторяет этапы S440 и S450, с тем чтобы продвигаться к целевому снижению управления дефорсированием.
Пояснение будет дано по действию управления дефорсированием со ссылкой на фиг.12. Фиг.12 представляет собой график, ось абсцисс которого указывает время t, а ось ординат указывает частоту Nc вращения компрессора 6. Посредством управления дефорсированием пониженная целевая частота Nc1min вращения устанавливается по шагам, и второй выходной сигнал Nc2 уменьшается до пониженной целевой частоты Nc1min вращения, в соответствии с чем двигатель 1 продвигается к приведению в действие с понижением. В зависимости от Δt (установленной временной привязки пониженной целевой частоты Nc1min вращения) на графике или установленного значения пониженной целевой частоты Nc1min вращения может свободно регулироваться замедление. Управление разгоном двигателя 1 также может выполняться подобным средством.
Соответственно, только два выходных сигнала частоты вращения нагнетателя (первый выходной сигнал Nc1 и второй выходной сигнал Nc2) сравниваются друг с другом в качестве средства обратной связи, в соответствии с чем управление дефорсированием может безусловно выполняться без прикладывания операционной нагрузки к БУД 10.
Настоящее изобретение может быть применено к двигателю, имеющему нагнетатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ С НАГНЕТАТЕЛЕМ (ВАРИАНТЫ) | 2007 |
|
RU2401388C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2595329C2 |
| ДВИГАТЕЛЬ | 2009 |
|
RU2451197C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2694108C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ НАДДУВОМ | 2016 |
|
RU2689656C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСПРЕДЕЛИТЕЛЬНЫМ ВАЛОМ ДВИГАТЕЛЯ В ТРАНСПОРТНОМ СРЕДСТВЕ (ВАРИАНТЫ) | 2015 |
|
RU2693279C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
Изобретение относится к области двигателестроения, в частности к двигателям с нагнетателем. Согласно изобретению предложен двигатель, обеспечивающий возможность постоянного определения количества оборотов нагнетателя с пониженной вычислительной нагрузкой, блок управления двигателем (БУД). Двигатель (1) снабжен базовой деталью (8) двигателя, составленной из множества цилиндров и нагнетателя (7), датчика (4) угла поворота коленчатого вала, турбодатчика (5), который определяет вращение нагнетателя (7) в качестве импульсных сигналов, усилитель (11), который делит импульсные сигналы на произвольный коэффициент деления и рассчитывает поделенные импульсные сигналы, и БУД (10), который оценивает состояние помпажа нагнетателя (7), при этом БУД (10) устанавливает заданное положение поршня каждого цилиндра по углу поворота коленчатого вала базовой детали (8) двигателя во временную привязку начала отсчета поделенных импульсных сигналов, выдает поделенные импульсные сигналы, отсчитанные от временной привязки начала отсчета до количества заданных оборотов в качестве первого выходного сигнала, и оценивает, что, если разность между первыми выходными сигналами в каждом цилиндре является большей, чем заданное значение, нагнетатель (7) находится в состоянии помпажа. Изобретение обеспечивает определение количества оборотов нагнетателя с пониженной вычислительной нагрузкой. 3 н.п. ф-лы, 12 ил.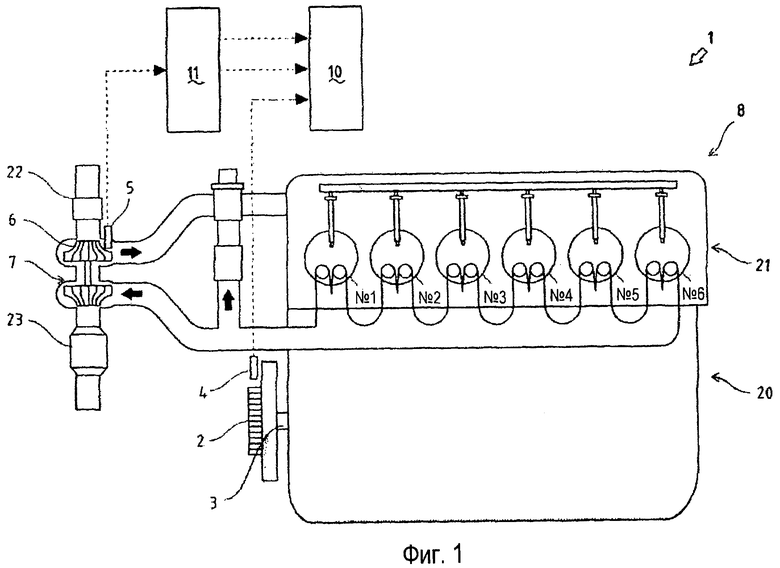
1. Двигатель, содержащий: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель;
средство определения частоты вращения двигателя;
средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала;
операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и средство управления, которое оценивает состояние помпажа нагнетателя;
при этом средство управления устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета поделенных импульсных сигналов, выдает поделенный импульсный сигнал, который задействуется на основании времени для счета поделенного импульсного сигнала заданное количество раз от временной привязки начала отсчета поделенного импульсного сигнала и заданного количества, в качестве первого выходного сигнала, и оценивает то, что, если разность между первыми выходными сигналами каждого цилиндра является не меньшей, чем заданное значение, нагнетатель находится в состоянии помпажа.
2. Двигатель, содержащий: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель;
средство определения частоты вращения двигателя;
средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала;
операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и
средство управления, которое регулирует количество впрыска топлива;
при этом средство управления устанавливает поделенный импульсный сигнал, поделенный на заданный коэффициент деления, в качестве первого поделенного импульсного сигнала, устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета первого поделенного импульсного сигнала, устанавливает поделенный импульсный сигнал, который задействуется на основании времени для отсчета поделенного импульсного сигнала заданное количество раз от временной привязки начала отсчета поделенного импульсного сигнала и заданного количества, в качестве первого выходного сигнала, выдает второй поделенный импульсный сигнал, поделенный на больший коэффициент деления, чем первый поделенный импульсный сигнал, в качестве второго выходного сигнала, оценивает цилиндр, у которого имеется разность между первым выходным сигналом и вторым выходным сигналом, как цилиндр несоответствия количества впрыска топлива, и регулирует количество впрыска топлива у цилиндра несоответствия количества впрыска топлива с тем, чтобы сделать разность не большей, чем заданное значение.
3. Двигатель, содержащий: базовую деталь двигателя, имеющую множество цилиндров и нагнетатель;
средство определения частоты вращения двигателя;
средство определения частоты вращения нагнетателя, которое определяет вращение нагнетателя в качестве импульсного сигнала;
операционное средство, которое делит импульсный сигнал на произвольный коэффициент деления и рассчитывает его в качестве поделенного импульсного сигнала; и
средство управления, которое оценивает, является или нет двигатель нештатным, и регулирует количество впрыска топлива с тем, чтобы уменьшить частоту вращения двигателя, когда двигатель оценивается нештатным;
при этом, когда двигатель оценивается нештатным, средство управления устанавливает поделенный импульсный сигнал, поделенный на заданный коэффициент деления, в качестве первого поделенного импульсного сигнала, устанавливает заданное положение поршня каждого из цилиндров по углу поворота коленчатого вала двигателя в качестве временной привязки начала отсчета первого поделенного импульсного сигнала, устанавливает поделенный импульсный сигнал, который задействуется на основании времени для отсчитывания поделенного импульсного сигнала заданное количество раз от временной привязки начала отсчета поделенного импульсного сигнала и заданного количества, в качестве первого выходного сигнала, выдает второй поделенный импульсный сигнал, поделенный на больший коэффициент деления, чем первый поделенный импульсный сигнал, в качестве второго выходного сигнала, и регулирует количество впрыска топлива с тем, чтобы установить второй выходной сигнал в согласовании с минимальным выходным сигналом из первых выходных сигналов в одном цикле.
| JP 63248920 А, 17.10.1988 | |||
| JP 2005220863 A, 18.08.2005 | |||
| DE 10202322 A1, 31.07.2003 | |||
| Способ регулирования двигателя внутреннего сгорания с турбонаддувом и система для его осуществления | 1980 |
|
SU931926A1 |

