Заявление приоритета в соответствии с 35 U.S.C. §119
Настоящая заявка на патент притязает на приоритет в соответствии с Предварительной заявкой № 60/896,480, поданной 22 марта 2007 г., под названием QUADRATURE IMBALANCE MITIGATION USING UNBIASED TRAINING SIGNALS, статус - находится на экспертизе; Регистрационный номер патентного поверенного № 071040P1.
Заявление приоритета в соответствии с 35 USC §120
Настоящая заявка на патент представляет собой частичное продолжение заявки на патент № US, регистрационный № 11/684,566, поданной 9 марта 2007 г., под названием QUADRATURE MODULATION ROTATING TRAINING SEQUENCE, статус - находится на экспертизе; передана ее правопреемнику и, тем самым, полностью приведена здесь в качестве ссылочного материала.
Настоящая заявка на патент представляет собой частичное продолжение заявки на патент № и US № 11/755,719, поданной 30 мая 2007 г., под названием QUADRATURE IMBALANCE MITIGATION USING UNBIASED TRAINING SIGNALS, регистрационный номер патентного поверенного № 060395B1, статус - находится на экспертизе, передана ее правопреемнику и, тем самым, явно приведена здесь в качестве ссылочного материала.
Настоящая заявка на патент относится к заявке на патент США под названием CHANNEL ESTIMATION USING FREQUENCY SMOOTHING, имеющей регистрационный номер патентного поверенного № 060395B3, подана одновременно с этой заявкой и передана ее правопреемнику, которая, тем самым, приведена здесь полностью в качестве ссылочного материала.
Уровень техники
Область техники, к которой относится изобретение
Это изобретение, в общем, относится к оценке канала связи и, более конкретно, к системам и способам для улучшения использования несмещенных обучающих последовательностей квадратурной модуляции, при обучении оценок канала приемника, путем удаления ошибок квадратурного дисбаланса.
Описание предшествующего уровня техники
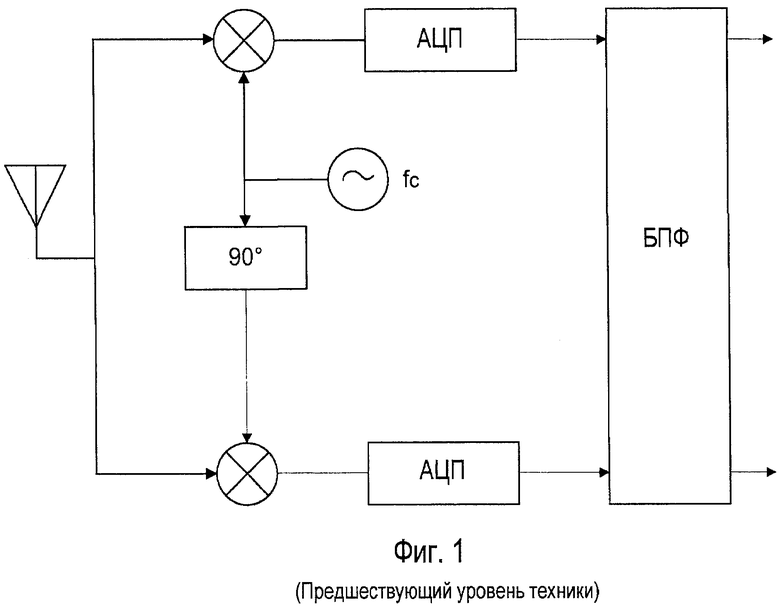
Фиг.1 является упрощенной блок-схемой традиционного входного каскада приемника (предшествующий уровень техники). Традиционный приемник беспроводной связи включает в себя антенну, которая преобразует излучаемый сигнал в проводимый сигнал. После некоторой исходной фильтрации проводимый сигнал усиливают. При достаточном уровне мощности несущую частоту сигнала можно преобразовать путем смешения сигнала (преобразования с понижением частоты) с сигналом гетеродина. Поскольку принятый сигнал квадратурно-модулирован, сигнал демодулируют через раздельные тракты I и Q до объединения. После преобразования частоты аналоговый сигнал может быть преобразован в цифровой сигнал, используя аналогово-цифровой преобразователь (ADC, АЦП), для обработки в основной полосе пропускания. Обработка может включать в себя быстрое преобразование Фурье (FFT, БПФ).
Существует множество ошибок, которые могут быть введены в приемник, которые оказывают отрицательное влияние на оценки канала и восстановление полезного сигнала. Ошибки могут быть введены из смесителей, фильтров и пассивных компонентов, таких как конденсаторы. Ошибки усугубляются, если они приводят к дисбалансу между трактами Q и I. В попытке оценить канал и, таким образом, исключить некоторые из этих ошибок в системах связи может использоваться формат сообщения, который включает в себя обучающую последовательность, которая может быть повторяющимся или заранее определенным символом данных. Используя систему мультиплексирования с ортогональным частотным разделением (OFDM, МОЧР), например, одну и ту же точку сигнального созвездия, IQ можно повторно передавать для каждой поднесущей.
В попытке экономии энергии в портативных устройствах, работающих от батареи, в некоторых системах OFDM используется только один символ модуляции для обучения. Например, возбуждают единственное направление в сигнальном созвездии (например, тракт I), в то время как другое направление (например, тракт Q) - нет. Такой же тип однонаправленного обучения также можно использовать с пилотными тонами. Примечание: скремблирование одиночного канала модуляции (например, канала I) со значениями символа ±1 не поворачивает точку сигнального созвездия и не обеспечивает возбуждения для квадратурного канала.
В присутствии квадратурного дисбаланса трактов, который превалирует в системах с большой полосой пропускания, описанная выше энергосберегающая обучающая последовательность приводит к смещенной оценке канала. Смещенная оценка канала может хорошо выравниваться с сигнальным созвездием IQ в одном направлении (то есть тракта I), но приводит к квадратурному дисбалансу в ортогональном направлении. Предпочтительно, чтобы любой дисбаланс был в равной степени распределен между двумя каналами.
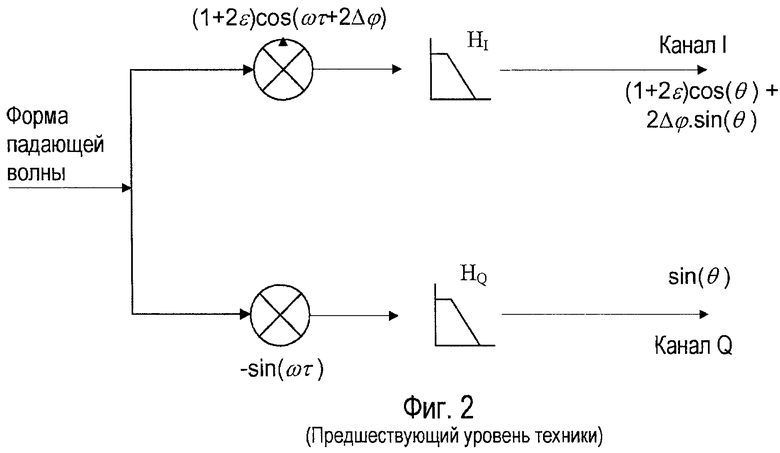
Фиг.2 является упрощенной схемой, иллюстрирующей квадратурный дисбаланс на стороне приемника (предшествующий уровень техники). Хотя это и не показано, дисбаланс на стороне передатчика является аналогичным. Предположим, что тракт Q является опорным. Форма падающей волны представляет собой cos(ωt+θ), где θ - фаза канала. На тракте Q осуществляется преобразование с понижением частоты с использованием - sin(ωt). На тракте I осуществляется преобразование с понижением частоты с использованием (1+2ε)cos(ωt+2∆φ). Величины 2∆φ и 2ε представляют аппаратные дисбалансы соответственно ошибку фазы и ошибку амплитуды. Низкочастотные фильтры H1 и HQ являются разными для каждого тракта. Фильтры вводят дополнительные амплитудное и фазовое искажения. Однако эти дополнительные искажения сосредоточены внутри 2∆φ и 2∆ε. Примечание: эти два фильтра являются реальными и влияют как на +ω, так и на -ω идентичным образом.
Предположим, что ошибки малы:
(1+2ε)cos(ωt+2∆φ))≈(1+2ε)cos(ωt)-2∆φ·sin(ωt)
Первый компонент с правой стороны, cos(ωt), представляет идеальный тракт I, в незначительной степени масштабированный. Второй компонент - 2∆φ·sin(ωt) - представляет собой небольшую утечку из тракта Q. После преобразования с понижением частоты формы подающей волны:
в тракте I: (1+2ε)cos(θ)+2ε·sin(θ)
в тракте Q: sin(θ).
Ошибки приводят к неправильной интерпретации положений символов в сигнальном созвездии квадратурной модуляции, что, в свою очередь, приводит к неправильно демодулируемым данным.
Сущность изобретения
Приемники беспроводной связи подвержены ошибкам, вызванным недостатком устойчивости аппаратных компонентов, связанных со смесителями, усилителями и фильтрами. В квадратурных демодуляторах эти ошибки также могут привести к дисбалансу между трактами I и Q, что приводит к ошибочно обработанным данным.
Для калибровки каналов приемника можно использовать обучающий сигнал. Однако обучающий сигнал, который не возбуждает тракты как I, так и Q, не позволяет решить проблему дисбаланса между двумя трактами. Несмещенную обучающую последовательность можно использовать для возбуждения обоих трактов I и Q, в результате чего получают лучшую оценку канала. Обычно оценки канала выводят из заранее определенной информации, связанной с положительными (+f) поднесущими. Еще лучшие оценки канала могут быть получены, если используют отрицательные поднесущие (-f) для вывода оценки какого-либо остаточного квадратурного дисбаланса.
В соответствии с этим предложен способ для удаления ошибок квадратурного дисбаланса в принимаемых данных. В способе принимают несмещенную обучающую последовательность в приемнике с квадратурной демодуляцией. Несмещенная обучающая последовательность имеет однородную накопленную энергию, равномерно распределенную в комплексной плоскости, и включает в себя заранее определенные опорные сигналы (p) на частоте +f и заранее определенные зеркальные сигналы (pm) на частоте -f. Несмещенную обучающую последовательность обрабатывают, генерируя последовательность обработанных символов (y) на частоте +f, представляющей информацию в комплексной плоскости в несмещенной обучающей последовательности. Каждый обработанный символ (y) умножают на зеркальный сигнал (pm) и получают несмещенную оценку Bm квадратурного дисбаланса на частоте (-f).
Например, несмещенная обучающая последовательность может быть принята по первой поднесущей и по оценке квадратурного дисбаланса, полученного для первой поднесущей. Затем в способе принимают квадратурно-модулированные данные связи по первой поднесущей в периодах символов, следующих после приема несмещенной обучающей последовательности. Обработанный символ (yc) генерируют для каждого символа данных связи, и каждый обработанный символ (yc) умножают на оценку квадратурного дисбаланса для вывода символа, скорректированного по дисбалансу.
В способе также умножают обработанный символ (y) на сопряженную величину опорного сигнала (p*) для получения несмещенной оценки (hu) канала на частоте +f. Используя квадратурный дисбаланс и оценки канала, могут быть выведены символы, скорректированные по дисбалансу.
Дополнительные детали описанного выше способа и системы для удаления ошибок квадратурного дисбаланса в принимаемых данных представлены ниже.
Краткое описание чертежей
Фиг.1 является упрощенной блок-схемой традиционного входного каскада приемника (предшествующий уровень техники).
Фиг.2 является упрощенной схемой, иллюстрирующей квадратурный дисбаланс на стороне приемника (предшествующий уровень техники).
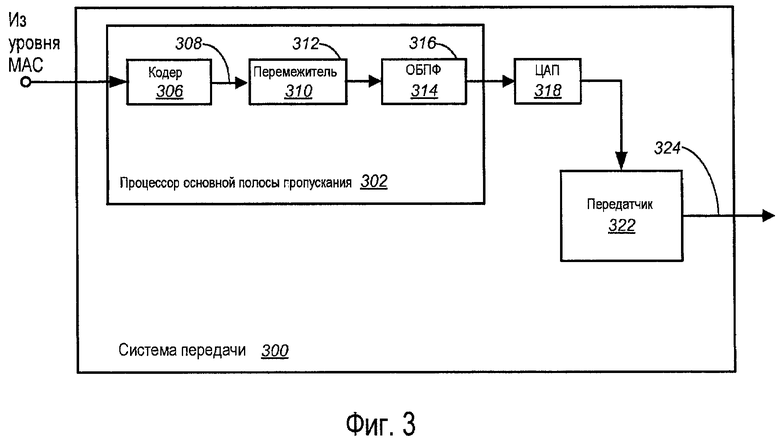
Фиг.3 является упрощенной блок-схемой, изображающей примерную систему передачи данных.
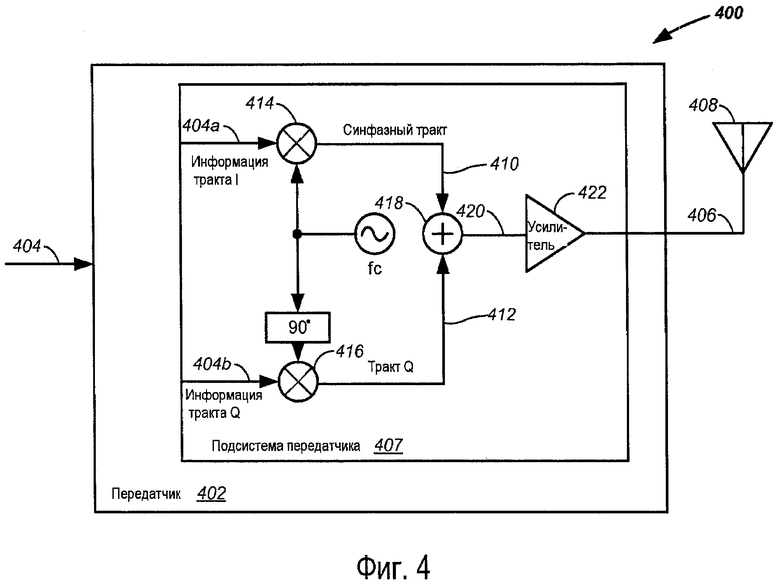
Фиг.4 является упрощенной блок-схемой системы или устройства для передачи несмещенной обучающей последовательности для передачи данных.
Фиг.5A является схемой, изображающей несмещенную обучающую последовательность, представленную как во временной, так и частотной областях.
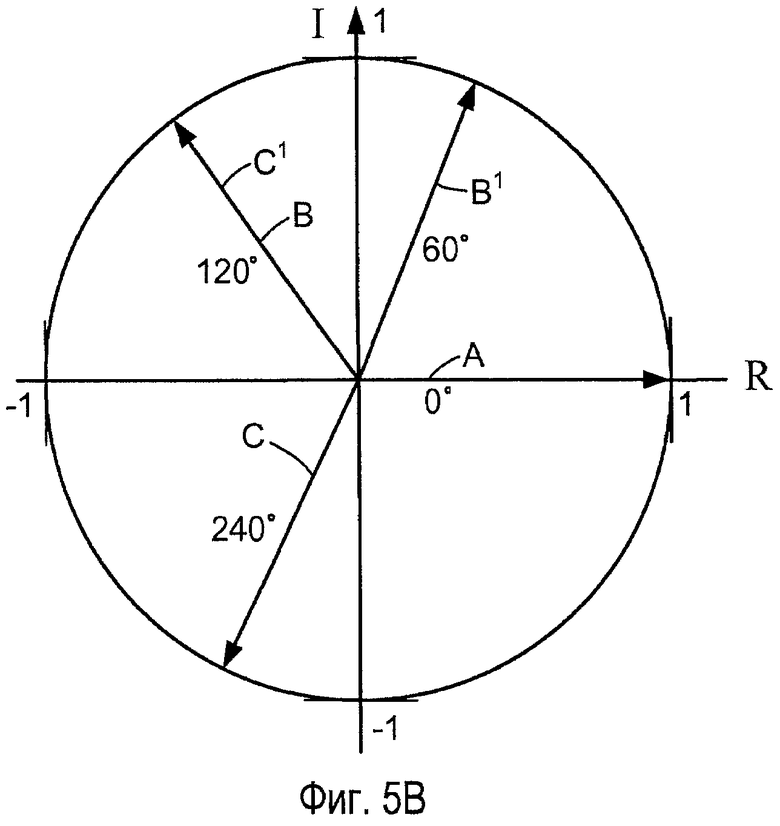
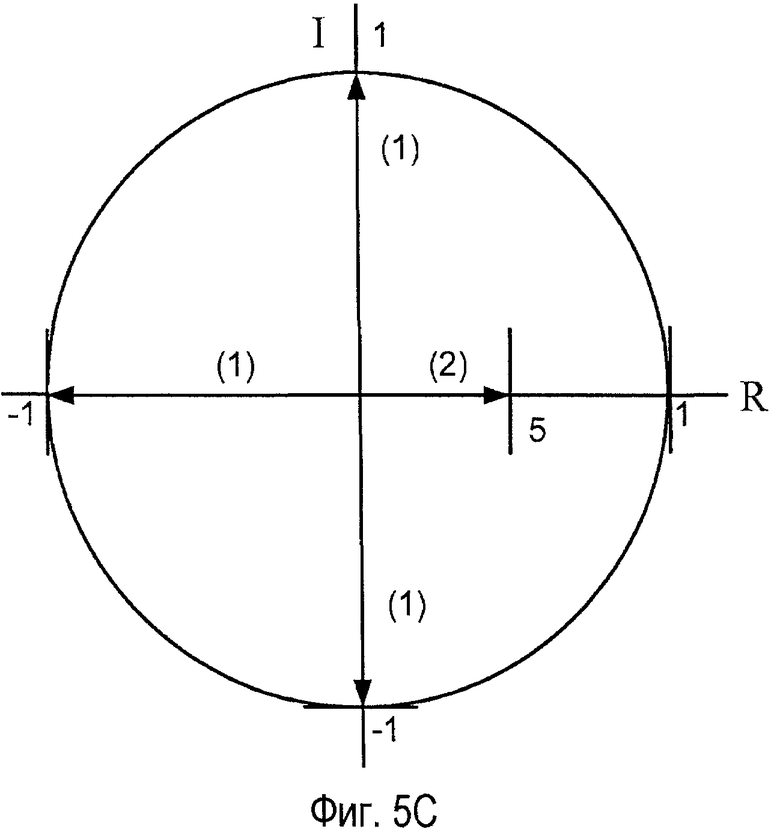
Фиг.5B и 5C являются схемами, изображающими однородное накопление мощности, равномерно распределенной в комплексной плоскости.
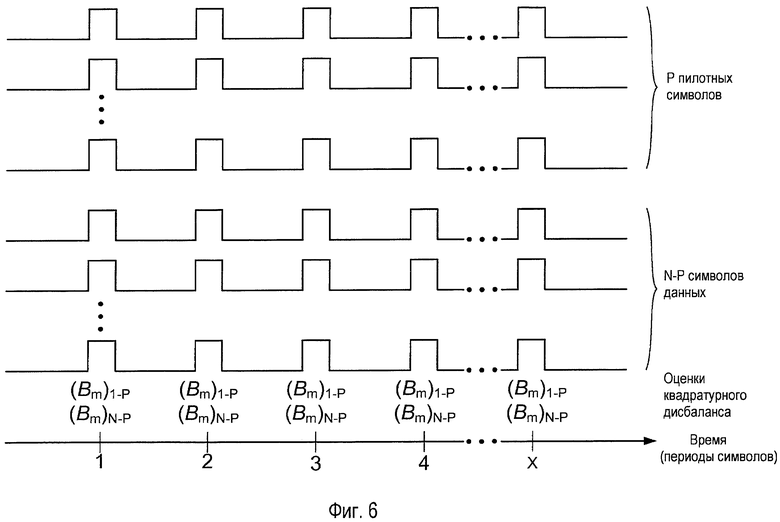
Фиг.6 является схемой, изображающей несмещенную обучающую последовательность, используемую как последовательность пилотных тонов во временной области.
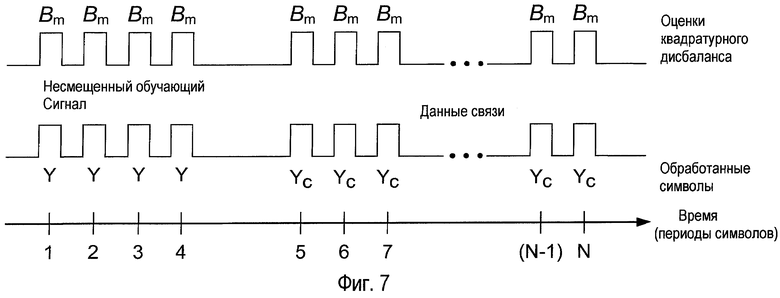
Фиг.7 является схемой, изображающей несмещенную обучающую последовательность, используемую как преамбула, предшествующая заранее не определенным данным связи.
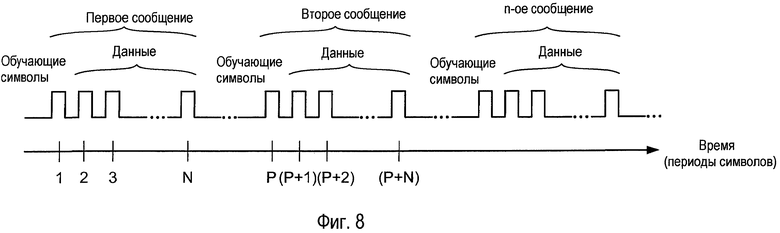
Фиг.8 является схемой, изображающей несмещенную обучающую последовательность, используемую путем усреднения символов для множества сообщений.
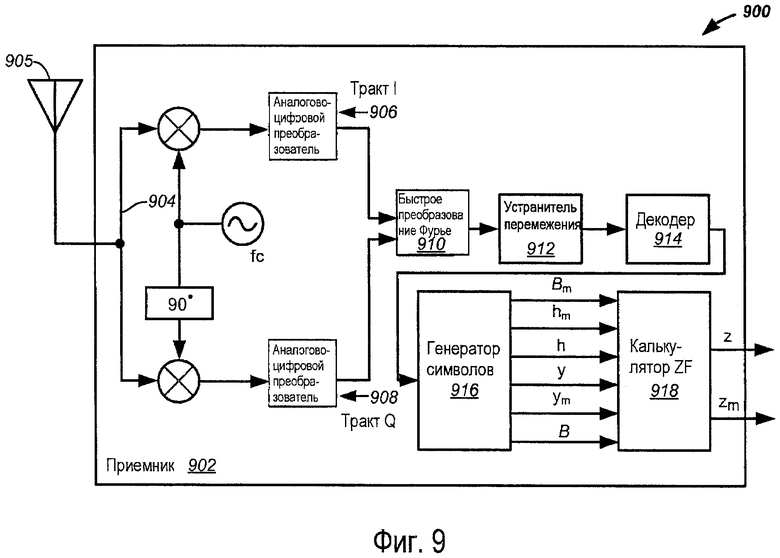
Фиг.9 является блок-схемой системы для удаления ошибок квадратурного дисбаланса в принимаемых данных.
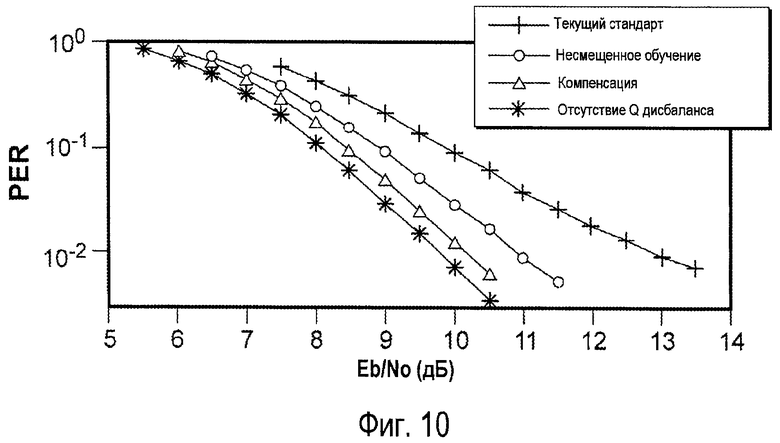
Фиг.10 изображает рабочие характеристики, обеспечиваемые в результате применения описанных выше алгоритмов к стандарту WiMedia UWB.
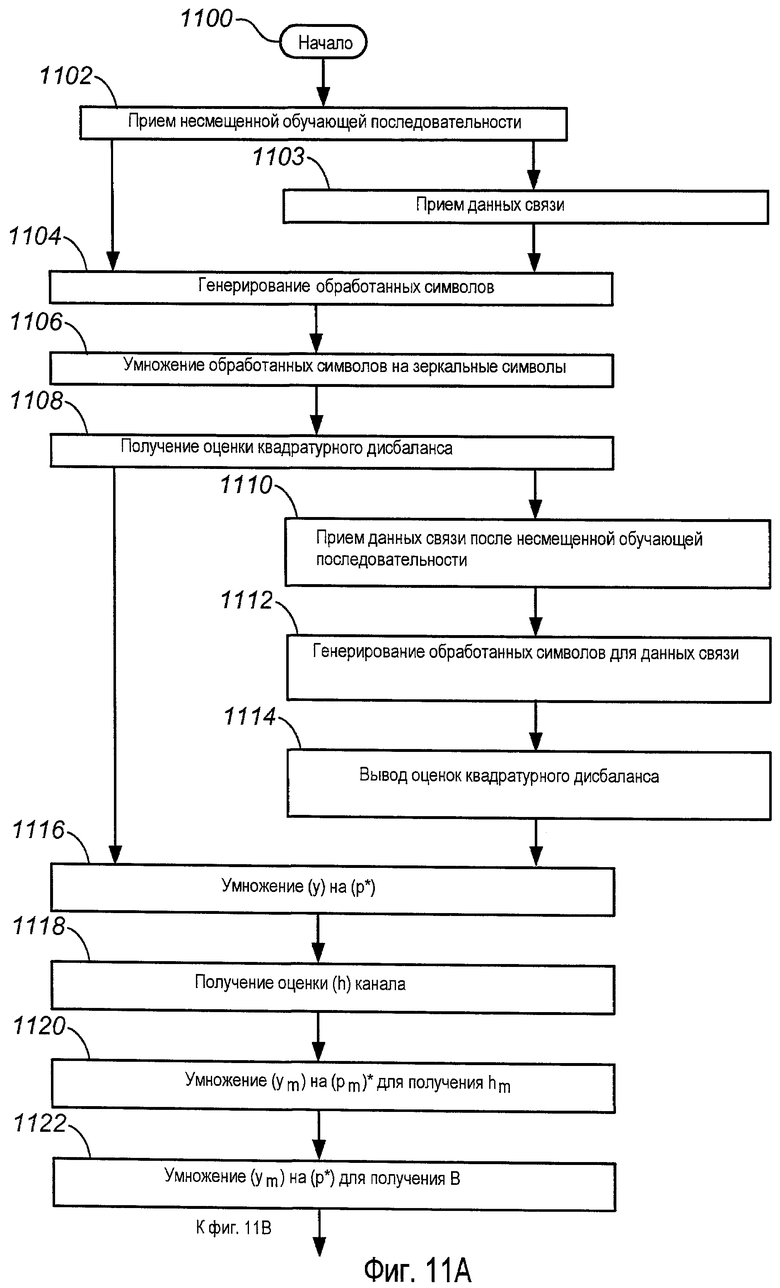
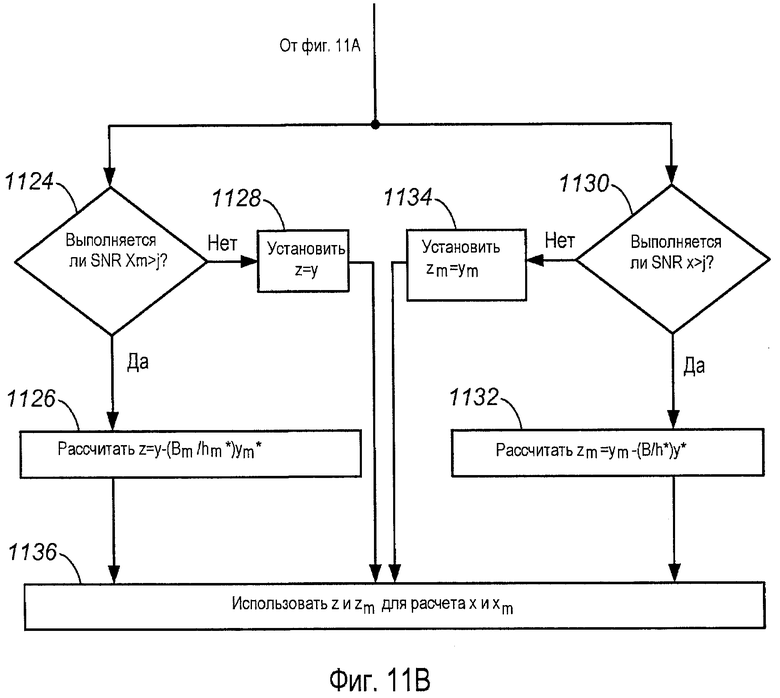
Фиг.11A и 11B являются блок-схемами последовательности операций, иллюстрирующими способ для удаления ошибок квадратурного дисбаланса в принимаемых данных.
Подробное описание изобретения
Различные варианты осуществления будут описаны ниже со ссылкой на чертежи. В следующем описании, с целью пояснения, различные конкретные детали представлены для обеспечения полного понимания одного или более аспектов. Может быть очевидно, что такой вариант (варианты) осуществления может быть выполнен на практике без этих конкретных деталей. В других случаях хорошо известные структуры и устройства представлены в форме блок-схемы для того, чтобы облегчить описание этих вариантов осуществления.
Используемые в данной заявке термины "процессор", "устройство обработки", "компонент", "модуль", "система" и т.п., предназначены для обозначения относящейся к компьютеру сущности, а именно либо аппаратных средств, встроенных программ, комбинации аппаратных и программных средств, программных средств или исполняемых программных средств. Например, компонентом может быть, но не ограничиваться этим, процесс, работающий в процессоре, генерирование, процессор, объект, исполняемый элемент, поток выполнения, программа и/или компьютер. В качестве иллюстрации, как приложение, работающее в вычислительном устройстве, так и вычислительное устройство, могут представлять собой компонент. Один или более компонентов могут находиться внутри процесса и/или потока выполнения, и компонент может быть локализован в одном компьютере и/или распределен между двумя или более компьютерами. Кроме того, эти компоненты могут выполняться с различных считываемых компьютером носителей, имеющих сохраненные на них различные структуры данных. Компоненты могут устанавливать связь посредством локальных и/или удаленных процессов, таких как в соответствии с сигналом, имеющим один или более пакетов данных (например, данных от одного компонента, взаимодействующего с другим компонентом, в локальной системе, распределенной системе и/или через сеть, такую как Интернет, с другими системами посредством сигнала).
Различные варианты осуществления будут описаны в виде систем, которые могут включать в себя множество компонентов, модулей и т.п. Следует понимать и принимать во внимание, что различные системы могут включать в себя дополнительные компоненты, модули и т.д., и/или могут не включать в себя все эти компоненты, модули и т.д., описанные в связи с фигурами. Комбинация этих подходов также может использоваться.
Различные иллюстративные логические блоки, модули и схемы, которые были описаны, могут быть воплощены или выполнены с использованием процессора общего назначения, цифрового сигнального процессора (DSP, ЦСП), специализированных интегральных микросхем (ASIC, СИМС), программируемой пользователем вентильной матрицы (FPGA, ППВМ) или другого программируемого логического устройства, дискретных ключей или транзисторной логики, дискретных аппаратных компонентов или любой их комбинации, разработанной для выполнения описанных здесь функций. Процессор общего назначения может представлять собой микропроцессор, но в качестве альтернативы, процессор может представлять собой любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть воплощен как комбинация вычислительных устройств, например, комбинация DSP и микропроцессора, множества микропроцессоров, одного или более микропроцессоров совместно с ядром DSP, или любой другой такой конфигурации.
Способы или алгоритмы, описанные в связи с раскрытыми здесь вариантами осуществления, могут быть воплощены непосредственно в виде аппаратных средств, в виде программного модуля, выполняемого процессором, или в комбинации этих двух подходов. Программный модуль может находиться в памяти RAM (ОЗУ, оперативное запоминающее устройство), флэш-памяти, в памяти ROM (ПЗУ, постоянное запоминающее устройство), в памяти EPROM (СППЗУ, стираемое программируемое постоянное запоминающее устройство), в памяти EEPROM (ЭСППЗУ, электрически стираемое программируемое постоянное запоминающее устройство), в регистрах, на жестком диске, на съемном диске, на CD-ROM (компакт-диск, предназначенный только для чтения) или в любой другой форме носителя данных, известного в данной области техники. Носитель данных может быть соединен с процессором таким образом, чтобы процессор мог считывать информацию с него и записывать информацию на носитель данных. В качестве альтернативы, носитель данных может быть выполнен интегрально с процессором. Процессор и носитель данных могут находиться в ASIC. ASIC может находиться в узле или в другом месте. В качестве альтернативы, процессор и носитель данных могут находиться как дискретные компоненты в узле или в другом месте в сети доступа.
Фиг.3 является упрощенной блок-схемой, изображающей примерную систему 300 передачи данных. Процессор 302 основной полосы пропускания имеет вход по линии 304 для приема цифровой информации из уровня управления доступом к среде (MAC, УДС) передачи данных. В одном аспекте процессор 302 основной полосы пропускания включает в себя кодер 306, имеющий вход по линии 304 для приема цифровой информации (MAC) и выход по линии 308 для вывода кодированной цифровой информации в частотной области. Перемежитель 310 можно использовать для перемежения кодированной цифровой информации, выдачи информации после перемещения в частотной области по линии 312. Перемежитель 310 представляет собой устройство, которое преобразует одиночный входной сигнал с высокой скоростью, во множество параллельных потоков с низкой скоростью, где каждый из потоков с более низкой скоростью связан с определенной поднесущей. Обратное быстрое преобразование Фурье (IFFT, ОБПФ) 314 принимает информацию в частотной области, выполняет операцию IFFT для входной информации и выдает цифровой сигнал во временной области по линии 316. Цифроаналоговый преобразователь 318 преобразует цифровой сигнал по линии 316 в аналоговый сигнал в основной полосе пропускания по линии 320. Как более подробно описано ниже, передатчик 322 модулирует сигнал в основной полосе пропускания и выдает сигнал в виде модулированных несущих, как выходной сигнал, по линии 324. Примечание: альтернативные схемные конфигурации, позволяющие выполнять те же функции, как описано выше, будут известны для специалистов в данной области техники. Хотя это и не явно представлено, система приемника могла бы быть составлена из аналогичного набора компонентов для обратной обработки информации, принятой из передатчика.
Фиг.4 является упрощенной блок-схемой системы или устройства для передачи несмещенной обучающей последовательности для передачи данных. Система 400 содержит передатчик или средство 402 передачи, имеющее вход по линии 404 для приема цифровой информации. Например, информация может быть выдана из уровня MAC. Передатчик 402 имеет выход по линии 406 для выдачи несмещенной обучающей последовательности с квадратурной модуляцией, представляющей однородную накопленную мощность, равномерно распределенную в комплексной плоскости.
Передатчик 402 может включать в себя подсистему 407 передатчика, такую как подсистема радиочастотного (RF, РЧ) передатчика, в которой используется антенна 408, для установления связи через воздух или вакуумную среду. Однако следует понимать, что изобретение применимо к любой среде передачи данных (например, беспроводной, проводной, оптической), которая позволяет переносить квадратурно-модулированную информацию. Подсистема 407 передатчика включает в себя тракт 410 синфазной (I) модуляции или средство для генерирования обучающей информации модуляции I во временной области, имеющей накопленную мощность. Подсистема 407 передатчика также включает в себя тракт 412 квадратурной (Q) модуляции или средство для генерирования обучающей информации модуляции Q во временной области, имеющей накопленную мощность, равную мощности тракта I модуляции. Информацию тракта I по линии 404a преобразуют с повышением частоты в смесителе 414 с использованием несущей fc, в то время как информацию тракта Q по линии 404b преобразуют с повышением частоты в смесителе 416 с использованием версии со сдвигом фазы несущей (fc+90°). Тракт 410 I и тракт 412 Q суммируют в сумматоре 418 и выдают по линии 420. В некоторых аспектах сигнал усиливают в усилителе 422 и выдают к антенне 408 по линии 406, из которой излучают несмещенные обучающие последовательности. Тракты I и Q, в качестве альтернативы, могут называться каналами I и Q. Несмещенная обучающая последовательность также может называться поворотным обучающим сигналом, квадратурно-сбалансированной обучающей последовательностью, сбалансированной обучающей последовательностью, сбалансированной обучающей последовательностью или несмещенным обучающим сигналом.
Например, несмещенная обучающая последовательность может быть первоначально послана через тракт 410 I модуляции с обучающей информацией, впоследствии посылаемой через тракт 412 Q модуляции. Таким образом, обучающий сигнал может включать в себя такую информацию как символ или повторяющуюся последовательность символов, посылаемых через тракт I модуляции, после чего передачу символа или повторяющиеся последовательности символов посылают только через тракт Q модуляции. В качестве альтернативы, обучающая информация может быть послана первоначально через тракт Q модуляции и впоследствии через тракт I модуляции. В случае, когда одиночные символы посылают поочередно через тракты I и Q, передатчик посылает поворотный обучающий сигнал. Например, первый символ всегда может быть (1,0), второй символ всегда может быть (0,1), третий символ (-1,0) и четвертый символ (0,-1).
Однако нет необходимости просто чередовать передачу символов через тракты I и Q модуляции для получения поворота символа, как описано выше. Например, передатчик может посылать обучающую информацию одновременно через оба тракта I и Q модуляции и комбинировать модулированные сигналы I и Q.
Описанный выше тип поворота несмещенной обучающей последовательности, при котором первоначально посылают обучающий сигнал через (только) тракт I модуляции, может быть выполнен путем возбуждения тракта I модуляции, но без возбуждения тракта Q модуляции. Затем передатчик посылает обучающий сигнал через тракт Q модуляции путем возбуждения тракта Q модуляции после посылки обучающей информации через тракт I модуляции. Обучающие символы можно также поворачивать путем выдачи символов, каждый с компонентами как I, так и Q, как обычно связано с квадратурной модуляцией.
Как правило, передатчик 402 также посылает квадратурно-модулированные (заранее не определенные) данные связи. Несмещенную обучающую последовательность используют приемником (не показан) для формирования несмещенных оценок канала, что позволяет более точно восстанавливать заранее не определенные данные связи. В одном аспекте квадратурно-модулированные данные связи посылают после посылки несмещенной обучающей последовательности. В другом аспекте несмещенную обучающую последовательность посылают одновременно с данными связи в форме пилотных сигналов. Система не ограничивается какой-либо конкретной временной взаимосвязью между обучающим сигналом и квадратурно-модулированными данными связи.
Для того чтобы быть несмещенными, значения символа, связанные с любой конкретной поднесущей, могут периодически изменяться. Самое простое средство равномерного распределения информации в комплексной плоскости, когда существует нечетное количество символов на сообщение, состоит в повороте значения символа на 90 градусов в каждый период. Как используется здесь, сообщение представляет собой группировку символов в заранее определенном формате. Сообщение имеет длительность несколько периодов символов. Один или более символов могут быть переданы в каждый период символа. Некоторые сообщения включают в себя преамбулу, которая предшествует основной части сообщения. Например, сообщение может быть сформировано как длинный пакет, содержащий много символов OFDM. Каждый символ OFDM содержит много поднесущих. В некоторых аспектах преамбула сообщения включает в себя несмещенную обучающую последовательность. В других аспектах несмещенная обучающая последовательность представляет собой последовательность из пилотных сигналов, которые передают одновременно с заранее не определенными данными связи.
Если нечетное количество символов используют в обучающей последовательности сообщения, методология, которая поворачивает фазу символа на 90 градусов каждый период, не всегда полезна. Для последовательности из 3 символов можно использовать поворот на 60 градусов или 120 градусов для равномерного распределения значений символа в комплексной плоскости. Для 5 символов можно использовать поворот на 180/5 градусов или 360/5 градусов. Если количество символов в обучающей последовательности представляет собой простое число, можно использовать решения, представляющие собой комбинацию. Например, если в сумме сообщение содержит 7 символов, тогда можно использовать поворот на 90 градусов для первых 4 символов и поворот на 120 (или 60) градусов для следующих трех символов. В другом аспекте несмещенная обучающая последовательность может быть усреднена по более чем одному сообщению. Например, если сообщение включает в себя 3 обучающих символа, тогда комбинация из 2 сообщений включает в себя 6 символов. В контексте обучающего сигнала из 6 символов можно использовать поворот на 90 градусов между символами.
Поскольку мощность представляет собой меру, зависящую от квадрата комплексного значения символа, мощность, связанную с вектором символа под углом θ, представленную в комплексном пространстве, также можно рассматривать как мощность при (θ+180). Следовательно, накопленная мощность под углом 60 градусов представляет собой тоже, что и мощность под углом 240 градусов. Другими словами, мощность, связанная с символом под углом θ, может быть суммирована с мощностью под углом (θ+180). В результате суммирования мощности под углами θ и (θ+180) комплексное пространство, если его рассматривать в перспективе мощности, простирается только на 180 градусов. По этой причине равномерное накопление мощности равномерно распределено в комплексном пространстве, когда несмещенная обучающая последовательность состоит только из 2 ортогональных символов или 3 символов, разделенных 60 градусами.
Фиг.5A является схемой, изображающей несмещенную обучающую последовательность, представленную как во временной области, так и в частотной области. В одном аспекте передатчик генерирует пару сигналов, включающую в себя опорный сигнал (p) с комплексным значением на частоте +f и зеркальный сигнал (pm) с комплексным значением на частоте -f, с нулевым произведением (p·pm). Например, в момент времени i=1 произведение (p1·p1m)=0. Как отмечено выше, p и pm представляют собой комплексные значения с компонентами амплитуды и фазы. В другом аспекте передатчик генерирует i экземпляров опорного сигнала (p) и зеркального сигнала (pm) и сводит к нулю сумму произведений (Pi·Pim). Другими словами, сумма (Pi·Pim)=0 для i=1-N. Следует отметить, что символ "точки" между Pi·Pim представляют обычную операцию умножения между скалярными числами.
Аналогично, когда передатчик генерирует i экземпляров опорного сигнала и зеркального сигнала, значения p и pm пары сигналов могут, но не обязательно, изменяться для каждого экземпляра. Например, передатчик может сводить к нулю сумму произведений (pi·pim) путем генерирования информации в виде комплексного значения, которое остается постоянным для каждого экземпляра, для представления p. Для представления pm передатчик может генерировать информацию как комплексное значение, которое поворачивается на 180 градусов в каждом экземпляре. Однако существует почти бесконечное количество других способов, с помощью которых произведение (pi·pim) может быть сделано равным нулю.
В другом аспекте передатчик генерирует i экземпляров опорного сигнала (p) и зеркального сигнала (pm), и произведение (pi·pim) для каждого экземпляра. Передатчик соединяет попарно экземпляры и делает равными нулю сумму произведений от каждого сдвоенного экземпляра.
Например, одно или более сообщений могут содержать временную последовательность из N пилотных тонов для данной поднесущей f, с N пилотными тонами для зеркальной поднесущей -f. Как отмечено выше, при описании фиг.5A, для формирования несмещенной обучающей последовательности, используя этот пилотный тон, общее решение состоит в том, что сумма (pi·pim)=0 для i=1-N. Для одного конкретного решения пилотные тоны соединяют попарно для i=1 и 2. Таким образом, p1·p1m+p2·p2m=0. Аналогично, пилотные тоны для i=3 и 4 могут быть соединены попарно следующим образом: p3·p3m+p4·p4m=0. Такое попарное соединение может продолжаться до i=N. Если каждая пара имеет сумму, равную нулю, тогда общая сумма также будет равна нулю, то есть сумма pi·pim=0. Попарное соединение упрощает проблему обнуления. Вместо поиска N пилотных сигналов, которые удовлетворяют сумме pi·pim=0, достаточно, чтобы можно было обнулить 2 пары пилотных сигналов.
Как описано выше, простые примеры формирования несмещенной обучающей последовательности включают в себя либо поворот символов на 90 градусов во временной области, или в частотной области, поддержания опорного символа на +f, но замену знака зеркального сигнала на -f. В обоих этих примерах используют 2 пары тонов, и они удовлетворяют уравнению p1·p1m+p2·p2m=0.
В качестве альтернативы, несмещенная обучающая последовательность может включать в себя:
Время 1: p1 для +f и p1m для -f;
Время 2: p2 для +f и p2m для -f;
Время 3: p3 для +f и P3m для -f; и
Время 4: p4 для +f и p4m для -f.
Несмещенная обучающая последовательность может быть получена путем усреднения. Принцип несмещенной обучающей последовательности диктует, что пилотный сигнал должен удовлетворять следующему уравнению:
p1·p1m+p2·p2m+p3·p3m+p4·p4m=0.
В качестве варианта, несмещенная обучающая последовательность может быть организована следующим образом:
p1·p1m+p2·p2m=0 и p3·p3m+p4·p4m=0.
Фиг.5B и 5C являются схемами, изображающими однородное накопление мощности, равномерно распределенной в комплексной плоскости. Комплексную плоскость можно использовать для представления информации действительной оси (R) и мнимой оси (I). Круг представляет границу однородной мощности или энергии с нормализованным значением 1. На фиг.5B несмещенная обучающая последовательность сформирована из 3 символов: первый символ (A) при 0 градусах; второй символ (B) при 120 градусах; и третий символ (C) при 240 градусах. Такое же распределение мощности получают, когда первый символ (A) остается в позиции 0 градусов, второй символ (B') находится под 60 градусов и третий символ (C') при 120 градусов. Мощность, связанная с каждым символом, равна 1.
На фиг.5C несмещенную обучающую последовательность формируют из 5 символов: 2 символа при 0 градусов, каждый с мощностью 0,5, таким образом, что накопленная мощность составляет 1; символ при 90 градусов с мощностью 1; символ при 180 градусов с мощностью 1; и символ при 270 градусов с мощностью 1.
Используемый здесь упомянутый выше термин "однородное накопление мощности" может точно соответствовать накоплению в каждом направлении комплексной плоскости, поскольку во многих обстоятельствах возможно передавать и принимать несмещенную обучающую последовательность с нулевой ошибкой. Таким образом, обучающая последовательность будет смещена на 100%. Другими словами, сумма pi·pim=0, как описано выше. При анализе наихудшего случая усредняют L пилотных символов, причем каждый имеет однородную накопленную мощность, следующим образом:
|sum pi·pim|=sum |pi|2=L.
Если L составляет 100%, и если |sum pi·pim|=L/4, тогда (однородная накопленная мощность) ошибка составляет 25%. Несмещенная обучающая последовательность с ошибкой 25% все еще представляет отличный результат. Если используют L/2 (ошибка 50%), получают хороший результат, поскольку интерференция IQ по оценке канала все еще уменьшается на 6 дБ.
Фиг.6 является схемой, изображающей несмещенную обучающую последовательность, выполненной как последовательность пилотных тонов во временной области. Передатчик может генерировать несмещенную обучающую последовательность, выдавая P пилотных символов за период символа во множестве периодов символа. Каждый импульс на чертеже представляет символ. Передатчик генерирует (N-P) квадратурно модулированных символов данных связи на период символа и одновременно выдает N символов на период символа во множестве периодов символов. Во многих системах передачи данных, таких, которые соответствуют стандартам IEEE 802.11 и UWB, пилотные тоны используют с обучающей целью канала.
Фиг.7 является схемой, изображающей несмещенную обучающую последовательность, выполненной как преамбула, предшествующая не определенным заранее данным связи. Передатчик генерирует квадратурные модулированные данные связи и выдает несмещенную обучающую последовательность в первом множестве периодов символов (например, во время 1-4), после чего следуют квадратурно-модулированные данные связи во втором множестве периодов символов (например, во время от 5 до N). И снова импульсы на чертеже представляют символы.
Например, в системе ультраширокополосной радиосвязи (UWB, УШП) используют 6 символов, передаваемых перед передачей данных связи или сигнала маяка. Поэтому 3 последовательных символа могут быть сгенерированы в тракте I модуляции, после которых следуют 3 последующих в тракте Q модуляции. Используя такую обработку, Q канал требуется активировать на короткий период для 3 символов, перед возвращением в режим ожидания. Однако существует много других комбинаций символов, которые можно использовать для генерирования несмещенной обучающей последовательности.
Или на фиг.5B или 5C можно видеть, что передатчик генерирует временную последовательность символов в комплексной плоскости с равной накопленной мощностью в множестве направлений (в комплексной плоскости). Используемый здесь термин "направление" относится к суммированию векторов под каждым углом θ и (θ+180). Например, мощность, связанную с символом под 0 градусов, накапливают с мощностью символа под 180 градусов, и 0 и 180 градусов представляют собой одно и то же направление. Вследствие такой взаимосвязи временная последовательность символов в несмещенной обучающей последовательности имеет совокупную мощность, связанную с информацией действительной оси во временной области, и равную совокупную мощность, связанную с информацией мнимой оси во временной области, как выдаваемых во множестве периодов символов посредством передатчика. В другом аспекте несмещенная обучающая последовательность, представляющая однородную накопленную мощность, равномерно распределенную в комплексной плоскости, может быть выражена как временная последовательность i комплексных символов (a) во временной области, следующим образом:
сумма ai(k)·ai(k)=0;
где k представляет собой количество выборок на период символов. Следует отметить, что "точка" между символами ai и ai предназначена для представления обычной операции умножения между скалярными числами.
Следовательно, символ ai типично представляет собой поднесущую с формой периодической волны, а не имеет какое-либо одно конкретное значение для а. Таким образом, ai изменяется с течением времени, и может быть представлено как ai(t). Однако если получены t выборок, символ может быть представлен как ai(kT), или ai(k), если предполагать, что T нормализовано до 1. Для систем во временной области суммирование по k исчезает. При использовании только одной выборки на символ, символ и выборка становятся одинаковыми, и уравнение может быть записано следующим образом:
сумма ai·ai=0.
Для иллюстрации с использованием простой 2-символьной ортогональной несмещенной обучающей последовательности, если первый символ (i=1) имеет угол 0 градусов, равная величина мощности должна существовать под углом 180 градусов, для удовлетворения уравнению. Аналогично, если второй символ находится под 90 градусов, равная величина мощности должна существовать под углом 270 градусов. Другие более сложные примеры могут потребовать суммирования символов по индексам i для получения обнуленного конечного результата.
Если рассмотреть альтернативно, формула сумма ai·ai=0 относится к тому факту, что если проекция будет выполнена в любом направлении в комплексной плоскости, и будет рассчитана мощность, эта мощность всегда остается одинаковой, независимо от угла. Мощность в направлении φ составляет:

Эта мощность остается постоянной для всех φ, если и только если сумма ai·ai=0.
Можно показать, что формула в частотной области (сумма pi·pim=0) эквивалентна сумме ai·ai=0. Сигнал во временной области, соответствующий pi и pim, представляет собой:

поскольку pi модулирует +f и pim модулирует -f.
В пределах одного символа i интеграл по времени ai·ai представляет собой:

поскольку exp(j4πft) поворачивается несколько раз и исчезает при интегрировании в один символ.
Тогда ai·ai, накопленное в одном символе равно pi·pim, если просуммировать все символы:

Фиг.8 является схемой, изображающей несмещенную обучающую последовательность, выполненную путем усреднения символов по множеству сообщений. Символ (или более чем один символ, не показан) генерируют в первый период символа в первом сообщении. Символ генерируют во второй период символа во втором сообщении, следующем после первого сообщения. В более общем случае символы обучающей информации генерируют во множестве (n) сообщений. Передатчик генерирует несмещенную обучающую последовательность, формируя равную мощность во множестве направлений в комплексной плоскости, как накопленную по множеству сообщений. Хотя показана обучающая последовательность типа преамбулы, аналогично фиг.7, тот же тип анализа применяют к несмещенной обучающей последовательности пилотного символа.
Фиг.9 является упрощенной блок-схемой системы для удаления ошибок квадратурного дисбаланса в принимаемых данных. Система или устройство 900 содержат приемник с квадратурной демодуляцией или средство 902 приема, имеющее вход по линии 904 для приема несмещенной обучающей последовательности. Как и в отношении передатчика на фиг.4, приемник 902 может представлять собой RF устройство, соединенное с антенной 905, для приема излучаемой информации. Однако приемник, в качестве альтернативы, может принимать несмещенную обучающую последовательность через проводную или оптическую среду передачи данных (не показана).
Приемник 902 имеет тракт 906 синфазной (I) демодуляции для приема обучающей информации I демодуляции во временной области, имеющей накопленную энергию. Тракт 908 квадратурной (Q) демодуляции принимает обучающую информацию Q демодуляции во временной области. Что касается несмещенной обучающей последовательности, тракт Q имеет накопленную мощность, равную мощности тракта I модуляции. Как обычно, приемник 902 включает в себя аналогово-цифровые преобразователи (ADC) 909, быстрый преобразователь 910 Фурье (FFT), обращенный перемежитель 912 и декодер 914.
Приемник 902 с квадратурной демодуляцией принимает несмещенную обучающую последовательность заранее определенных опорных сигналов (p) на частоте (+f) и заранее определенных зеркальных сигналов (pm) на частоте (-f), с однородно накопленной энергией, равномерно распределенной в комплексной плоскости. Приемник 902 генерирует последовательность обработанных символов (y) на частоте (+f), представляющих информацию комплексной плоскости в несмещенной обучающей последовательности, умножает каждый обработанный символ (y) на зеркальный сигнал (pm) и выдает оценку (Bm) квадратурного дисбаланса на частоте (-f). Для простоты показано, что генерирование обработанных символов и умножение на зеркальные символы выполняют в генераторе 916 символов.
Как отмечено выше при описании передатчика, несмещенная обучающая последовательность представляет собой временную последовательность из символов комплексной плоскости с равной накопленной энергией во множестве направлений. С альтернативной точки зрения, приемник принимает несмещенную обучающую последовательность как пару сигналов, включающую в себя опорный сигнал (p) с комплексным значением на частоте +f и зеркальный сигнал (pm) с комплексным значением на частоте -f, где произведение (p·pm) равно нулю. Например, приемник принимает несмещенную обучающую последовательность как i экземпляров опорного сигнала (p) и зеркального сигнала (pm), где сумма произведений (pi·pim) равна нулю.
В некоторых аспектах приемник 902 принимает несмещенную обучающую последовательность с множеством одновременно принятых заранее определенных опорных сигналов (pn) и множеством одновременно принятых заранее определенных зеркальных сигналов (pnm). Например, n пилотных символов могут быть приняты в каждый период символа. Приемник 902 генерирует множество обработанных символов (yn) из соответствующего множества опорных сигналов, умножает каждый обработанный символ на его соответствующий зеркальный сигнал и получает множество оценок (Bnm) канала из соответствующего множества произведений (yn) (pnm).
Более подробно (см. фиг.6) приемник принимает несмещенную обучающую последовательность как P пилотных символов на период символа, во множестве периодов символа, и получает P несмещенных оценок пилотного канала. Одновременно приемник принимает (N - P) квадратурно-модулированных символов данных связи в каждый период символа и генерируют обработанный символ (yc) для данных связи в каждый период символа (обозначен как YN-P). Оценки каналов экстраполируют для каждого обработанного символа (yc) и выводят оценки B m квадратурного дисбаланса (обозначены как (Bm)N-P) для каждого обработанного символа (yc) из оценок квадратурного дисбаланса пилотного канала (обозначенных как (Bm)1-P).
В другом аспекте приемник принимает несмещенную обучающую последовательность с временной последовательностью из n заранее определенных опорных сигналов (pn) и n заранее определенных зеркальных сигналов (pnm), см. фиг.5A. Приемник генерирует временную последовательность из n обработанных символов (yn) из временной последовательности опорных сигналов и умножает каждый обработанный символ во временной последовательности на его соответствующий зеркальный сигнал. Временную последовательность из n оценок (Bnm) квадратурного дисбаланса получают и усредняют n оценок квадратурного дисбаланса.
Более подробно, как показано на фиг.7, приемник может принимать несмещенную обучающую последовательность по первой поднесущей и приемник выводит оценку (Bm) квадратурного дисбаланса для первой поднесущей. Приемник принимает квадратурно-модулированные данные связи по первой поднесущей в периоды символов, следующие после приема несмещенной обучающей последовательности, генерируя обработанный символ (yc) для каждого символа данных связи. Оценку (Bm) квадратурного дисбаланса выводят из каждого обработанного символа.
Возвращаясь к фиг.9, приемник (то есть генератор 916 символов) умножает обработанный символ (y) на сопряженную величину опорного сигнала (p*), получает несмещенную оценку (hu) канала на частоте +f. Затем обрабатывают несмещенную обучающую последовательность для генерирования последовательности из обработанных символов (ym) на частоте -f. Приемник умножает символ (ym) на (pm*), для получения оценки hm канала, на частоте -f и умножает символ ym на p*, для получения оценки B квадратурного дисбаланса на частоте +f.
Приемник рассчитывает символ (z)=y-Bm/hm*)ym*, скорректированный по дисбалансу, если отношение (SNR, ОСШ) сигнал-шум для (xm) больше, чем j, и в противном случае устанавливает (z) равным (y). Для простоты показан калькулятор 918 обращения в нуль незначащих коэффициентов (ZF, ОН), выдающий символы, скорректированные по дисбалансу, в ответ на прием обработанных символов, оценок каналов и оценок квадратурного дисбаланса. Приемник (то есть ZF калькулятор 918) рассчитывает (zm)=ym-(B/h*)y*, если SNR (x) больше, чем j, и в противном случае, устанавливает (zm), равным (ym). Приемник использует (z) и (zm) при расчете (x) и (xm) соответственно, что находится за пределами объема данного описания. В одном аспекте, как поясняется более подробно ниже, приемник рассчитывает (zm) и (z), используя оценки (B) и (Bm) квадратурного дисбаланса соответственно, если SNR, больше чем 1 (j=1).
Хотя это не показано конкретно, приемник по фиг.9 также может быть выполнен как устройство обработки для удаления ошибок квадратурного дисбаланса в принимаемых данных. Такое устройство обработки содержит модуль приема квадратурной демодуляции, имеющий вход для приема несмещенной обучающей последовательности с заранее определенными опорными сигналами (p) на частоте (+f) и с заранее определенными зеркальными сигналами (pm) на частоте (-f), с однородно накопленной энергией, равномерно распределенной в комплексной плоскости. Модуль приема генерирует последовательность из обрабатываемых символов (y) на частоте (+f), представляющей информацию в комплексной плоскости, в несмещенной обучающей последовательности, умножает каждый обработанный символ (y) на зеркальный сигнал (pm) и выдает оценку (Bm) квадратурного дисбаланса на частоте (-f).
Обучающие последовательности, либо сформированные в преамбуле, или как пилотные сигналы, аналогичны в том, что содержание информации передаваемых данных типично заранее определено или представляет собой "известные" данные, что позволяет приемнику калибровать и выполнять измерения канала. При приеме данных связи (заранее не определенных), существуют 3 неизвестных: сами данные, канал и шумы. Приемник при этом не может выполнять калибровку шумов, поскольку шумы меняются случайным образом. Измерения канала обычно связаны с задержкой и многолучевым распространением. Для относительно коротких периодов времени можно измерять ошибки, получающиеся в результате многолучевого распространения, если используются заранее определенные данные, такие как обучающие или пилотные сигналы. После того как канал станет известным, такие измерения можно использовать для удаления ошибок в принимаемых данных связи (заранее не определенных). Поэтому некоторые системы выдают обучающий сигнал для измерения канала перед тем, как начнется декодирование данных.
Однако канал может изменяться, например, в связи с тем, что либо передатчик, либо приемник перемещается в пространстве, или из-за дрейфа тактовой частоты. Следовательно, многие системы продолжают посылать дополнительные "известные" данные вместе с "неизвестными" данными для отслеживания медленных изменений в канале.
Хотя это специально не показано, передатчик по фиг.3 и приемник по фиг.10 могут быть скомбинированы с формированием приемопередатчика. Фактически передатчик и приемник в таком приемопередатчике могут совместно использовать такие элементы, как антенна, процессор в основной полосе пропускания и схема уровня MAC. Приведенные выше пояснения предназначены для описания приемопередатчика, который как передает несмещенные обучающие последовательности, так и рассчитывает несмещенные оценки канала на основе приема несмещенных обучающих последовательностей из других приемопередатчиков в сети, состоящей из устройств.
Функциональное описание
Современные системы связи с высокой скоростью передачи данных передают сигналы по двум отдельным каналам, синфазному и квадратурному каналам (I и Q). Эти два канала формируют 2D сигнальное созвездие в комплексной плоскости. QPSK и QAM являются примерами сигнальных созвездий. Каналы I и Q могут быть сформированы с использованием радиочастотного оборудования, которое может не быть идеально сбалансированным, из-за вариаций в RF компонентах, в результате чего возникает IQ дисбаланс. В получающих все большее распространение системах прямого преобразования, проблема дисбаланса становится еще большей. IQ дисбаланс искажает сигнальное созвездие, в результате чего возникают взаимные помехи между каналами Q и I: происходит интерференция сигнала с самим собой. Повышение мощности передачи не помогает, поскольку самогенерируемая интерференция увеличиваются с мощностью сигнала. Отношение сигнал-шум (SINR) достигает верхней границы, которая устанавливает предел для наибольшей скорости передачи данных, достижимой для заданного RF оборудования. Для повышения скорости передачи данных используют дорогостоящее решение, состоящее в использовании более высококачественного, более дорогостоящего оборудования. Возможно, менее дорогостоящее решение состоит в том, что выполняют цифровую оценку дисбаланса IQ и компенсируют ее. Концепция алгоритмов цифровой оценки и компенсации была ранее внедрена в данной области техники. Однако эти решения проявляют тенденцию повышения затрат, поскольку они не основаны на специальном типе обучающей последовательности. Такие решения часто учитывают только дисбаланс на одной стороне, обычно на стороне приемника.
Ниже приведены примеры, которые фокусируются на мультиплексировании с ортогональным частотным разделением (OFDM) на основе систем, работающих во временной области, которые изучают дисбаланс при передаче из конца в конец, от передатчика к приемнику. Кроме того, в OFDM дисбаланс моделируют как функцию частоты, учитывая вариации частотного отклика фильтров.
Представлены два вида улучшений: одно с нулевыми затратами, которое устраняет интерференцию оценки канала, используя несмещенную обучающую последовательность. При этом достигается существенный выигрыш, из-за того, что ошибка оценки канала часто оказывает большее отрицательное воздействие на рабочие характеристики, чем ошибка в самих данных. Второе, требующее относительно малые затраты, компенсирует искажение данных, если требуется еще больший выигрыш.
Модель IQ дисбаланса представлена ниже. Здесь представлен анализ для того, чтобы показать, как обычная оценка канала, с использованием несмещенной обучающей последовательности может уменьшить часть IQ дисбаланса. Затем представлено прямое расширение для расчета параметров IQ дисбаланса при условии использования эффективных алгоритмов. Используя оцененные параметры, представлен простой алгоритм компенсации для уменьшения искажений данных. Также представлены результаты моделирования для UWB WiMedia, а также предложения по изменению стандарта.
Модель IQ дисбаланса
IQ дисбаланс возникает, когда не поддерживается баланс мощности (амплитуды) или ортогональность (фаза) между синфазным (I) и квадратурным (Q) каналами. Поэтому IQ дисбаланс характеризуется дисбалансом 2ε амплитуды и дисбалансом 2∆φ фазы.
Сигналы во временной области
Комплексный символ x передают и принимают через каналы I и Q. В идеальном канале без шумов символ x принимают без изменений. Но в присутствии IQ дисбаланса, вероятно, принимают зашумленную или искаженную версию.
где
представляют собой комплексные величины, моделирующие дисбаланс, α≈1 и β≈0. Нелинейную модель (1) линеаризуют через векторную форму
B представляет собой матрицу дисбаланса. Второй ряд является ненужным, поскольку он представляет собой дублирующую версию первого ряда. Но он обеспечивает одинаковый размер и тип для входа и выхода, поэтому можно выполнить конкатенацию блоков дисбаланса в приемнике и передатчике, как описано ниже. Матрица дисбаланса в передатчике определена по Bt и в приемнике определена по Br.
Канал c одним отводом
Рассматривают канал с одним отводом, пригодный для OFDM. Канал h с одним отводом в соответствующей матричной форме представляет собой следующее:
При дисбалансе в передатчике и приемнике, и в аддитивном белом Гауссовом шуме n (AWGN) векторная форма N= принятого сигнала выражается как конкатенация линейных блоков
принятого сигнала выражается как конкатенация линейных блоков
Общий результат состоит в том, что IQ дисбаланс и канал комбинируют для формирования глобального канала h' с учетом нежелательных искажений или интерференции, характеризуемых глобальным параметром β' дисбаланса. Глобальный параметр β' дисбаланса изменяется, когда изменяется канал, и может потребоваться регулярно выполнять его оценку.
Затем рассматривают условие, в котором символ x, вместо охвата всей комплексной плоскости, ограничивают до заданной оси (1D). Например, ось может быть связана с модуляцией BPSK (двоичная фазовая манипуляция), действительной осью, мнимой осью или любой осью между ними. В этом случае может быть записано x*=kx, где k представляет собой комплексную константу (поворот) и
Если x ограничивается уникальной осью, IQ дисбаланса исчезает, становясь интегральной частью общего отклика канала.
Сигналы в частотной области
В то время как предыдущая модель применима к сигналам во временной области, ниже рассмотрим модификацию, в которой сигнал x, представляющий интерес, будет задан в частотной области, на частоте f. Во временной области этот сигнал переносят посредством комплексного тона, xeJ2πft. После замены членов в уравнении (1), получают следующее:

При OFDM интерференция, образующаяся из-за IQ дисбаланса, не проявляется на той же частоте f, а скорее на зеркальной частоте -f, и наоборот. То, что передают на частоте -f, формирует интерференцию на частоте +f. Если сигнал xm представляет собой сигнал, передаваемый на частоте -f, где индекс m обозначает величину на зеркальной частоте -f, тогда на частоте -f получают следующее:

Здесь использовали обобщение уравнений во временной области. Параметры α и β IQ дисбаланса представляют здесь функцию частоты. Это моделирует дисбаланс, из-за различий фильтров низкой частоты (в основной полосе пропускания) или полосовых фильтров (IF, ПЧ, промежуточной частоты) в системе. Тракты I и Q не могут иметь точно одинаковые фильтры, и, следовательно, дисбаланс меняется с частотой. В системах во временной области присутствует такого рода дисбаланс, но ее компенсация связана с очень большими затратами. Требуются эквалайзеры и расширение модели так, чтобы она работала с различными конволюциями по различным каналам. Таким образом, во временной области используют общий или усредненный дисбаланс. Системы в частотной области способны использовать преимущества структуры плоского эквалайзера и моделируют дисбаланс для каждой частоты.
Если выход уравнений (7) и (8) скомбинировать для каждой поднесущей, соблюдается следующее:
Если исключить поднесущие (автоматически обрабатываются FFT), функция линейной модели сигналов на +f и -f может быть записана как
В модели в частотной области второй ряд больше не является ненужным. Эта модель работает в одном интервале с парой зеркальных частот. Канал h с одним отводом на частоте f и hm на частоте -f моделируют с помощью матрицы
шум n AWGN на частоте f и nm на частоте -f формируют вектор N= шумов. Модель из конца в конец представляет собой
шумов. Модель из конца в конец представляет собой
где h', hm' представляют собой отводы глобального канала, и β', βm' представляют собой глобальные параметры дисбаланса. Параметры дисбаланса меняются при изменении каналов, и может потребоваться регулярная их оценка.
Поскольку IQ дисбаланс генерирует интерференцию исключительно из зеркальной частоты, можно отметить два интересных случая. Если на зеркальной частоте не передают сигнал или в канале происходит затухание, интерференция не образуется. С другой стороны, если сигнал или канал является сильным, интерференция может быть сильной. Следовательно, при OFDM эффект IQ дисбаланса является более проблематичным.
Обычная оценка канала
Перед проверкой алгоритмов компенсации, показано, как половина проблемы может быть решена без каких-либо затрат, просто путем использования несмещенной обучающей последовательности. Несмещенная обучающая последовательность полностью устраняет интерференцию из оценки канала, заметно улучшая рабочую характеристику. Фактически, ошибка в оценке канала часто приводит к более сильным отрицательным последствиям, чем ошибка в данных, поскольку оценка канала проявляет тенденцию формирования смещения в сигнальном созвездии.
Модель (12) имитируют с помощью пилотных тонов. На частоте +f передают пилотный сигнал p, и на частоте -f пилотный сигнал pm. Предполагая, без потери общности, что пилотные сигналы имеют единичную норму (канал переносит эффективную мощность), обычную оценку канала на частоте f получают путем устранения поворота с помощью p*
В результате усреднения нескольких наблюдений канала автоматически уменьшают шумы (для ясности представления, устранение поворота шумов здесь не представлено). Что касается члена β'mpm*p*, во множестве систем OFDM (например, WiMedia UWB) используют обучающую последовательность, которая представляет собой просто повторяющийся символ. Поэтому этот член не исчезает при усреднении. Применение скремблирования +1 или -1 ко всему символу OFDM не помогает, поскольку ничто не меняется при одновременной инверсии знака как p*, так и pm*. Вместо этого выполняют следующее: после накопления ряда наблюдений обнуляют сумму произведений
Часто обучающая последовательность состоит из четного количества символов, и этого достаточно для обеспечения того, что сумма каждой пары будет равна нулю

Примеры несмещенных обучающих последовательностей
Примеры простых последовательностей, которые удовлетворяют этому условию, представлены в Таблице 1. Эти типы обучающих последовательностей обозначены как несмещенные обучающие последовательности, поскольку, с одной стороны, формируют несмещенные оценки канала, и, с другой стороны, обучающие сигналы равномерно охватывают измерения I и Q в комплексной плоскости во временной области. Например, несмещенная обучающая последовательность не концентрируется только вдоль действительной оси.
В качестве доказательства: рассмотрим комплексное скалярное число с единичной нормой  , посередине между pi и pim. Во временной области пилотные сигналы суммируют до 2aicos(2πft+θ). Во временной области и в заданном символе OFDM 2 зеркальных пилотных сигнала охватывают протяженность в единственном направлении, определенном комплексной константой ai. Если передают L символов, суммарная (или средняя или накопленная) мощность в направлении φ представляет собой
, посередине между pi и pim. Во временной области пилотные сигналы суммируют до 2aicos(2πft+θ). Во временной области и в заданном символе OFDM 2 зеркальных пилотных сигнала охватывают протяженность в единственном направлении, определенном комплексной константой ai. Если передают L символов, суммарная (или средняя или накопленная) мощность в направлении φ представляет собой  . Эта мощность является постоянной в любом направлении φ, если и только если
. Эта мощность является постоянной в любом направлении φ, если и только если  . При этом достигается равномерный охват в комплексной плоскости.
. При этом достигается равномерный охват в комплексной плоскости.
Оценка IQ дисбаланса
После оценки глобального канала h' рассмотрим оценку параметра βm' глобального дисбаланса. Тщательный анализ уравнения (12) показывает, что этот параметр может быть получен с помощью способа, очень похожего на способ обычной оценки канала. Таким образом, βm' можно рассматривать как "канал", по которому передают пилотный сигнал pm*. Следовательно, путем устранения поворота на pm, может быть получена оценка дисбаланса. Условие для несмещенной оценки дисбаланса идентично уравнению (14).
В общем, используя несмещенные обучающие последовательности и две обычные оценки канала, получают хорошие оценки для канала из конца в конец и параметра дисбаланса (Таблица 2).
Алгоритм оценки
Сглаживание по соседним поднесущим
В дополнение к усреднению по соседним символам OFDM оценку канала можно сглаживать по соседним поднесущим в пределах одного символа. В OFDM циклический префикс разрабатывают коротким, и предполагается, что канал изменяется медленно от тона к тону. Аналогично, фильтры в RF цепи должны иметь короткий временной отклик, и их частотный отклик также изменяется медленно, то есть IQ дисбаланс изменяется медленно по поднесущим. Те же самые технологии сглаживания канала можно использовать для сглаживания и улучшения оценки параметра дисбаланса. При использовании несмещенных обучающих последовательностей не возникает взаимодействие между оценкой канала и оценкой дисбаланса. Каждая оценка может быть сглажена независимо.
Если уникальный символ OFDM используют для оценки, становится невозможным найти несмещенную обучающую последовательность, которая удовлетворяет уравнению (14). В этом случае близкая к несмещенной обучающая последовательность может быть получена путем применения суммирования из уравнения (14) по группам из 2 или более соседних поднесущих. Затем сглаживание автоматически компенсирует всю или часть интерференции из зеркальных частот. Одно решение состоит в повороте пилотного сигнала на 90 градусов на соседней поднесущей (движение в зеркальном направлении по положительным и отрицательным частотам).
Оценка
Использование несмещенных обучающих последовательностей и упомянутой выше обычной оценки канала приводит к получению эстиматора по наименьшим квадратам (LS, НК). Из всех эстиматоров LS наибольшую значимость представляет минимальная среднеквадратичная ошибка (MMSE, МСКО).
Эстиматор наименьших квадратов
L передач Xi, L членов Ni шумов и L наблюдений Yi могут быть соответствующим образом конкатенированы матрицей размером 2 на L
Затем уравнение (12) становится следующим

Неизвестное представляет собой H'. Эстиматор LS представляет собой

Когда условие (14) удовлетворяется, легко проверить, что XXH представляет собой диагональ (поперечные члены исчезают). Она пропорциональна единичной матрице, поскольку пилотные сигналы нормализуют до единичной нормы. Затем

представляет точно четыре обычных оценки канала с устранением поворота соответственно на pi*, pim, pim* и pi, как описано в предыдущем разделе. Две оценки получают для частоты f, и две оценки получают для зеркальной частоты -f.
Оптимальный эстиматор
Несмещенные обучающие последовательности и обычные оценки канала представляют собой эстиматор LS. Но любой эстиматор  также представляет собой эстиматор LS. Ниже показано, что использование несмещенных обучающих последовательностей позволяет получить отличный эстиматор. Модель (17) можно рассматривать как неизвестную информацию H', переданную за 2 последовательные передачи более чем по 2 векторам (ряды
также представляет собой эстиматор LS. Ниже показано, что использование несмещенных обучающих последовательностей позволяет получить отличный эстиматор. Модель (17) можно рассматривать как неизвестную информацию H', переданную за 2 последовательные передачи более чем по 2 векторам (ряды  ) в L-мерном пространстве. Мы обозначили как
j,
) в L-мерном пространстве. Мы обозначили как
j,  j и
j и  j соответственно ряд j из , и , где j
j соответственно ряд j из , и , где j {1,2}. Модели (12) и (17) могут быть записаны следующим образом
{1,2}. Модели (12) и (17) могут быть записаны следующим образом
Здесь использовали 2 передачи, в каждой из которых применяли 2 вектора
1,
2 и в которых каждый вектор переносит комплексную информацию амплитуды, оценка которой должна быть получена. Эстиматор LS состоит из проецирования на каждый вектор, параллельно другому вектору, для того, чтобы исключить интерференцию. Очень хороший результат получают, когда 2 вектора являются ортогональными, то есть когда скалярное произведение (14) равно нулю. Несмещенные обучающие последовательности, по определению, представляют собой обучающие последовательности, которые подтверждают это условие. Другие последовательности используют неортогональные векторы, и им не достает рабочих функций угла между векторами
1,
2. Многие системы OFDM в настоящее время используют очень плохие типы обучающих последовательностей, где
1,
2 являются коллинеарными, и при этом невозможно правильно оценить 4 записи в H'. Такие обучающие последовательности проявляют тенденцию оценки более шумных версий каналов h' и h'm.
Для расчета среднеквадратических ошибок (MSE, СКО), ошибка оценки представляет собой  . Это представляет собой матрицу размером 2×2, то есть содержащую 4 значения ошибки. Каждое значение может быть изолировано путем умножения левой и правой стороны на комбинацию векторов
. Это представляет собой матрицу размером 2×2, то есть содержащую 4 значения ошибки. Каждое значение может быть изолировано путем умножения левой и правой стороны на комбинацию векторов  и
и  . Если предположить, что
. Если предположить, что  представляет собой единичную матрицу, или, в более общем случае, диагональную матрицу с элементами σ2 и σm 2, можно показать, что MSE
представляет собой единичную матрицу, или, в более общем случае, диагональную матрицу с элементами σ2 и σm 2, можно показать, что MSE  и
и  соответственно представляют собой первый и второй диагональные элементы
соответственно представляют собой первый и второй диагональные элементы  . И для
. И для  , и
, и  MSE соответственно представляет собой первый и второй диагональные элементы
MSE соответственно представляет собой первый и второй диагональные элементы  .
.
Суммарное значение MSE представляет собой  . Теперь задача состоит в том, чтобы найти , который сводит к минимуму
. Теперь задача состоит в том, чтобы найти , который сводит к минимуму  , которое подвергают ограничению, состоящему в том, что общая мощность пилотного сигнала остается постоянной, то есть
, которое подвергают ограничению, состоящему в том, что общая мощность пилотного сигнала остается постоянной, то есть  . Используя собственное разложение, задача может быть записана, как состоящая в том, чтобы свести к минимуму ∑1/λj при условии, что ∑λj является константой. Задачу решают с помощью множителей Лагранжа, и она типично имеет оптимальное решение, когда все собственные значения равны друг другу. Это означает, что
. Используя собственное разложение, задача может быть записана, как состоящая в том, чтобы свести к минимуму ∑1/λj при условии, что ∑λj является константой. Задачу решают с помощью множителей Лагранжа, и она типично имеет оптимальное решение, когда все собственные значения равны друг другу. Это означает, что  пропорционально единичной матрице.
пропорционально единичной матрице.
Общее значение MSE было минимизировано, и полученное в результате значение MSE на элемент составляет либо σ2/L или σm 2/L. Но это MSE на элемент, вероятно, является наилучшим из всех, которые могут быть получены, даже если используют единичную передачу вектора. MSE вряд ли будет улучшена для 2 передач вектора, и поэтому MSE на элемент было минимизировано. Несмещенные обучающие последовательности плюс обычный эстиматор канала представляют MMSE всех эстиматоров LS.
Компенсация IQ дисбаланса
Если добавки от несмещенной оценки канала недостаточно, параметры IQ дисбаланса можно оценивать (как описано выше) и можно применять для компенсации искажений данных. Оценку H' получают в модели (12), Y=H'X+N. Теперь фокус установлен на неизвестных данных X. Модель используется та же, что и в любом канале с 2 отводами, с взаимной корреляцией. Здесь можно приспособить любой алгоритм выравнивания канала. Простой алгоритм выравнивания представлен пригодным для повсеместно используемой QAM с перемежением битов и затуханием в каналах.
Единственная проблема при использовании подхода (ZF, ОН) обращения в нуль H'-1Y=X+H'-1N состоит в том, что он увеличивает шум, когда зеркальный канал слабый, до тех пор, пока не будут учтены сложные окрашенные шумы. В настоящем решении используют ZF, но только когда зеркальный канал не является слабым. В уравнении (12), при замене xm его значением, получают следующее

где  представляет собой улучшение шумов. Примечание: предполагается, что член дисбаланса второго порядка β'*βm'<<h'hm'*. Когда такая аппроксимация недействительна, рассматривают скорректированный канал
представляет собой улучшение шумов. Примечание: предполагается, что член дисбаланса второго порядка β'*βm'<<h'hm'*. Когда такая аппроксимация недействительна, рассматривают скорректированный канал  , что приводит к получению точной оценки канала и параметров дисбаланса.
, что приводит к получению точной оценки канала и параметров дисбаланса.
В основном, технология ZF состоит в расчете

Путем вычитания величины зеркальной частоты (Bm'/hm')ym из принятого сигнала y получают простую модель канала без IQ дисбаланса. Остальная часть цепочки декодирования остается без изменений.
Такое решение хорошо работает, если только улучшение шумов будет слабее, чем исходная интерференция из-за IQ дисбаланса, то есть |n'|2<|βm'xm*|2. Если нет, тогда используют оригинальный сигнал y, вместо z, скорректированный по дисбалансу. При этом нет необходимости оценивать n', для того чтобы принять решение. Тогда можно выбрать надежное улучшение на основе среднего значения. Таким образом, учитывая ожидаемые значения

Когда соотношение сигнал/шум SNRm зеркальной частоты больше 1, используют член z, скорректированный по дисбалансу. В противном случае сохраняют исходный сигнал y. Из-за неточности оценки канала и дисбаланса более безопасно использовать большее значение SNR, например, SNRm>2 хорошо работает для WiMedia UWB. Следует отметить, что SNRm обычно может быть получено из глобального SNR, через формулу SNRm=|hm'|2SNR.
В Таблице 3 кратко представлен алгоритм ZF с исключением улучшения шумов.
Алгоритм компенсации
Результаты моделирования
Фиг.10 изображает рабочие характеристики, достигаемые при применении описанных выше алгоритмов для стандарта WiMedia UWB. Набольшую скорость передачи данных, 480 Мбит/с, моделировали в модели CM2 канала в соответствии со стандартом IEEE 802.15.3 (пикосота внутри помещения на расстоянии приблизительно 4 метра). Установку тени и переключение полосы отключили. IQ дисбаланс оставался постоянным и равным 2ε=10% (0,8 дБ) по амплитуде и 2Δφ=10 градусов по фазе. Одна и та же величина дисбаланса присутствовала в передатчике и приемнике. На чертеже показана частота ошибок при передаче пакетов (PER, ЧОП) как функция Eb/No. Рабочие характеристики быстро ухудшались без какой-либо формы компенсации. В Таблице 4 представлены потери для различных алгоритмов относительно идеального случая.
WiMedia UWB: потери из-за IQ дисбаланса при PER 10-2
IQ дисбаланс из конца в конец и канал комбинируют, формируя глобальную матрицу размером 2 на 2 канала. При использовании несмещенной обучающей последовательности достигается значительный прирост без затрат. Несмещенные обучающие последовательности автоматически компенсируют самогенерирующуюся интерференцию из конца в конец из оценки канала. Кроме того, такие обучающие последовательности являются идеальными для оценки параметров IQ дисбаланса, и простой алгоритм задан для компенсации искажений данных: обращение в нуль не значащих коэффициентов с исключением улучшения шумов.
WiMedia UWB, в частности, использует преимущества, получаемые, благодаря следующим улучшениям: обычная смещенная обучающая последовательность, которая состоит из 6 символов, передаваемая исключительно по каналу I, может быть разделена на 2 половины для формирования несмещенной последовательности. Первые 3 символа посылают по каналу I, и последние 3 символа посылают по каналу Q. Путем однородного охвата комплексной плоскости, несмещенную обучающую последовательность формируют со значительным приростом для высоких скоростей передачи данных. Для обеспечения обратной совместимости эта схема может быть зарезервирована для режимов с высокой скоростью передачи данных и сигнализирована посредством маяков, или можно вслепую детектировать тип обучающей последовательности.
В OFDMA (например, WiMAX) поднесущие f и -f могут быть назначены для разных пользователей. Значительная интерференция может возникать, если управление мощностью переводит одного пользователя на высокий уровень мощности. Поэтому хорошая идея состоит в том, чтобы расположить пилотные сигналы различных пользователей по зеркальным поднесущим. Эти пилотные сигналы должны удовлетворять критерию несмещенной обучающей последовательности. Каждый пользователь автоматически получает преимущество без каких-либо дополнительных усилий. Пилотные сигналы могут переключаться в разные местоположения при поддержании зеркальных положений.
Формулы во временной области могут быть расширены до множественного доступа с кодовым разделением каналов (CDMA, МДКР) с гребенчатым эквалайзером, комбинирующим несколько каналов с одним отводом. Несмещенные обучающие последовательности автоматически улучшают оценку канала на отвод. Простая несмещенная обучающая последовательность для CDMA состоит из постоянного поворота комплексных символов на 90 градусов.
Фиг.11A и 11B являются блок-схемами последовательности операций, иллюстрирующие способ для удаления ошибок квадратурного дисбаланса в принимаемых данных. Хотя способ представлен для ясности как последовательность пронумерованных этапов, нумерация не обязательно диктует порядок этих этапов. Следует понимать, что некоторые из этих этапов могут быть пропущены, выполнены параллельно или выполнены без требования поддержания строгого порядка последовательности. Используемые здесь термины "генерирование", "вывод" и "умножение" относятся к обработке, которая может быть выполнена с помощью машиночитаемых программных инструкций, аппаратных средств или комбинации программных средств и аппаратных средств. Способ начинается на этапе 1100.
На этапе 1102 принимают несмещенную обучающую последовательность в приемнике с квадратурной демодуляцией. Несмещенная обучающая последовательность имеет однородную накопленную энергию, равномерно распределенную в комплексной плоскости, и включает в себя заранее определенные опорные сигналы (p) на частоте +f и заранее определенные зеркальные сигналы (pm) на частоте -f. Как подробно пояснялось выше, несмещенная обучающая последовательность представляет собой временную последовательность символов в комплексной плоскости с равной накопленной энергией во множестве направлений. В качестве альтернативы, на этапе 1102 принимают пару сигналов, включающую в себя опорный сигнал (p) с комплексным значением на частоте +f и зеркальный сигнал (pm) с комплексным значением на частоте -f, где произведение (p·pm) равно нулю. Например, могут быть приняты i экземпляров опорного сигнала (p) и зеркального сигнала (pm), где сумма произведений (pi·pim) равна нулю.
На этапе 1104 обрабатывают несмещенную обучающую последовательность, генерируя последовательность обработанных символов (y) на частоте +f, представляющей информацию в комплексной плоскости, в несмещенной обучающей последовательности. На этапе 1106 умножают каждый обработанный символ (y) на зеркальный сигнал (pm). На этапе 1108 получают несмещенную оценку B m квадратурного дисбаланса на частоте -f.
В одном аспекте на этапе 1102 принимают несмещенную обучающую последовательность с множеством одновременно принятых заранее определенных опорных сигналов и множеством одновременно принятых заранее определенных зеркальных сигналов (pnm). Аналогично, на этапе 1104 генерируют множество сигналов (yn) из соответствующего множества опорных сигналов (pn). На этапе 1106 умножают каждый принятый символ (yn) на его соответствующий зеркальный сигнал (pnm), и на этапе 1108 получают множество несмещенных оценок (Bnm) квадратурного дисбаланса из соответствующего множества произведений (yn) (pnm).
Например, на этапе 1102 могут быть приняты P пилотных символов за период символа, во множестве периодов символа, и на этапе 1108 получают P оценок квадратурного дисбаланса пилотного канала на период символа. В этом аспекте на этапе 1103 одновременно принимают (N-P) квадратурно-модулированных символов данных связи в каждый период символа (также см. фиг.6). Затем генерирование обработанных символов на этапе 1104 включает в себя генерирование обработанного символа (yc) для данных связи в каждый период символов. Аналогично, вывод оценок квадратурного дисбаланса на этапе 1108 включает в себя вывод оценок (Bm) квадратурного дисбаланса для каждого обработанного символа (yc) из оценок квадратурного дисбаланса пилотного канала.
В другом аспекте на этапе 1102 принимают временную последовательность из n заранее определенных зеркальных сигналов (pnm) и n заранее определенных опорных сигналов (pn). Генерирование последовательности обработанных символов (y) на этапе 1104 включает в себя генерирование временной последовательности из n обработанных символов (yn). Затем получение несмещенной оценки (Bnm) квадратурного дисбаланса на этапе 1108 включает в себя получение последовательности из n оценок квадратурного дисбаланса и усреднение n оценок квадратурного дисбаланса.
Например (см. фиг.7), на этапе 1102 может быть принята несмещенная обучающая последовательность по первой поднесущей, и на этапе 1108 получают оценку квадратурного дисбаланса для первой поднесущей. Затем, на этапе 1110, принимают квадратурно-модулированные данные связи по первой поднесущей в периоды символов, следующие после приема несмещенной обучающей последовательности. На этапе 1112 генерируют обработанный символ (yc) для каждого символа данных связи и на этапе 1114 выводят оценки (Bm) квадратурного дисбаланса для каждого обработанного символа (yc).
В другом аспекте способ включает в себя следующие дополнительные этапы. На этапе 1116 умножают обработанный символ (y) на сопряженную величину опорного сигнала (p*). На этапе 1118 получают несмещенную оценку (h) канала на частоте +f. Обработка несмещенной обучающей последовательности на этапе 1104 включает в себя генерирование последовательности обработанных символов (ym) на частоте -f. Затем, на этапе 1120, умножают символ (ym) на (pm*) для получения оценки hm канала, на частоте (-f), и на этапе 1122 умножают символ ym на p* для получения оценки B квадратурного дисбаланса на частоте +f.
Если отношение сигнал-шум (SNR) для (xm) будет больше, чем j (этап 1124), то на этапе 1126 рассчитывают символ (z)=y-(-Bm/hm*)ym*, скорректированный по дисбалансу. В противном случае, на этапе 1128 устанавливают (z) равным (y). Если SNR (x) больше, чем j (этап 1130), тогда на этапе 1132 рассчитывают (zm)=ym-B/h*) y*. В противном случае, на этапе 1134 устанавливают (zm) равным (ym). На этапе 1136 используют (z) и (zm) при расчете (x) и (xm) соответственно. В одном аспекте j=1.
Описанную выше блок-схему последовательности операций также можно интерпретировать как выражение машиночитаемого носителя, имеющего сохраненные на нем инструкции для удаления ошибок квадратурного дисбаланса в принимаемых данных. Эти инструкции могли бы соответствовать этапам 1100-1136, как пояснялось выше.
Были представлены системы, способы, устройства и процессоры, которые обеспечивают возможность удаления ошибок квадратурного дисбаланса в принимаемых данных. Примеры конкретных протоколов и форматов передачи данных были представлены для иллюстрации изобретения. Однако изобретение не ограничивается только этими примерами. Другие изменения и варианты осуществления изобретения будут понятны для специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УМЕНЬШЕНИЕ КВАДРАТУРНОГО ДИСБАЛАНСА С ИСПОЛЬЗОВАНИЕМ НЕСМЕЩЕННЫХ ОБУЧАЮЩИХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2008 |
|
RU2458474C2 |
| ОЦЕНКА КАНАЛА С ИСПОЛЬЗОВАНИЕМ ЧАСТОТНОГО СГЛАЖИВАНИЯ | 2008 |
|
RU2428805C2 |
| ПОВОРОТНАЯ ОБУЧАЮЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ КВАДРАТУРНОЙ МОДУЛЯЦИИ | 2008 |
|
RU2451413C2 |
| ОЦЕНКА МУЛЬТИПЛЕКСИРОВАННЫХ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2007 |
|
RU2418372C2 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ OFDM-СИГНАЛОВ С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 2010 |
|
RU2423002C1 |
| ОЦЕНИВАНИЕ ШУМА ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2406238C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ПРИЕМА OFDM СИГНАЛОВ В КАНАЛАХ С ПАМЯТЬЮ | 2015 |
|
RU2618211C2 |
| УПРАВЛЕНИЕ ПОЛОСОЙ ЧАСТОТ МЕЖДУ НЕСУЩИМИ ДЛЯ УМЕНЬШЕНИЯ ДИСБАЛАНСА IQ | 2011 |
|
RU2515282C1 |
| Способ оценки параметров канала в OFDM-системах | 2019 |
|
RU2713378C1 |
| СИСТЕМА И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ С РАСПРЕДЕЛЕННЫМИ ВХОДАМИ И РАСПРЕДЕЛЕННЫМИ ВЫХОДАМИ | 2011 |
|
RU2578206C2 |
Изобретение относится к беспроводной связи, а более конкретно к оценке канала связи. Достигаемый технический результат - удаление ошибок квадратурного дисбаланса в принимаемых данных. Изобретение заключается в том, что принимают несмещенную обучающую последовательность в приемнике с квадратурной демодуляцией. Несмещенная обучающая последовательность имеет однородную накопленную энергию, равномерно распределенную в комплексной плоскости, и включает в себя заранее определенные опорные сигналы (р) на частоте +f и заранее определенные зеркальные сигналы (рm) на частоте -f. Несмещенную обучающую последовательность обрабатывают, генерируя последовательность обработанных символов (у) на частоте +f, представляющую информацию в комплексной плоскости в несмещенной обучающей последовательности. Каждый обработанный символ (у) умножают на зеркальный сигнал (рm), и несмещенную оценку Вm квадратурного дисбаланса получают на частоте (-f). Используя оценки квадратурного дисбаланса, оценки канала и обработанные символы, можно генерировать символ, скорректированный по дисбалансу. 5 н. и 33 з.п. ф-лы, 4 табл., 14 ил.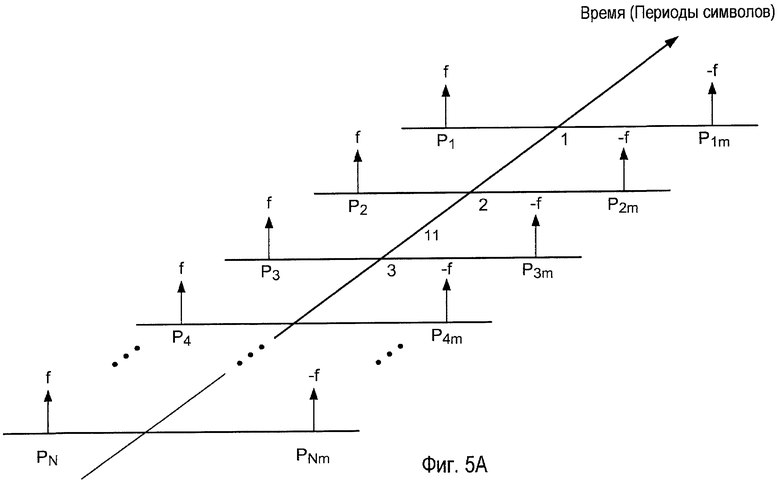
1. Способ удаления ошибок квадратурного дисбаланса в принимаемых данных, причем способ содержит этапы, на которых:
принимают несмещенную обучающую последовательность в приемнике с квадратурной демодуляцией, причем несмещенная обучающая последовательность имеет однородную накопленную энергию, равномерно распределенную в комплексной плоскости, и включает в себя заранее определенные опорные сигналы (р) на частоте +f и заранее определенные зеркальные сигналы (рm) на частоте -f;
обрабатывают несмещенную обучающую последовательность, генерируя последовательность обработанных символов (у) на частоте +f, представляющую информацию в комплексной плоскости в несмещенной обучающей последовательности;
умножают каждый обработанный символ (у) на зеркальный сигнал (рm);
получают несмещенную оценку Вm квадратурного дисбаланса на частоте -f, и
выводят скорректированные по дисбалансу символы, используя оценки квадратурного дисбаланса.
2. Способ по п.1, в котором прием несмещенной обучающей последовательности включает в себя прием несмещенной обучающей последовательности с множеством одновременно принятых заранее определенных опорных сигналов и множеством одновременно принятых заранее определенных зеркальных сигналов (pnm);
в котором генерирование обработанного символа (у) включает в себя генерирование множества сигналов (уn) из соответствующего множества опорных сигналов (рn);
в котором умножение обработанного символа (у) на зеркальный сигнал (рm) включает в себя умножение каждого принятого символа (уn) на его соответствующий зеркальный сигнал (pnm); и
в котором получение несмещенной оценки Вm квадратурного дисбаланса включает в себя получение множества несмещенных оценок (Вnm) квадратурного дисбаланса из соответствующего множества произведений (yn)(рnm).
3. Способ по п.1, в котором прием несмещенной обучающей последовательности включает в себя прием временной последовательности символов в комплексной плоскости с одинаковой накопленной энергией во множестве направлений.
4. Способ по п.1, в котором прием несмещенной обучающей последовательности включает в себя прием временной последовательности из n заранее определенных зеркальных сигналов (pnm) и n заранее определенных опорных сигналов (рn);
в котором генерирование последовательности из обработанных символов (у) включает в себя генерирование временной последовательности из n обработанных символов (уn); и
в котором получение несмещенной оценки (Вnm) квадратурного дисбаланса включает в себя этапы, на которых:
получают последовательность из n оценок квадратурного дисбаланса; и усредняют n оценок квадратурного дисбаланса.
5. Способ по п.1, в котором прием несмещенной обучающей последовательности включает в себя прием Р пилотных символов на период символа во множестве периодов символа;
в котором получение несмещенной оценки квадратурного дисбаланса включает в себя получение Р оценок квадратурного дисбаланса пилотного канала на период символа;
причем способ дополнительно содержит этап, на котором:
одновременно принимают (N-P) квадратурно-модулированных символов данных связи в каждый период символа;
в котором генерирование последовательности из обработанных символов включает в себя генерирование обработанного символа (ус) для данных связи в каждый период символа; и,
в котором вывод оценок квадратурного дисбаланса включает в себя вывод оценок (Вm) квадратурного дисбаланса для каждого обработанного символа (ус) из оценок квадратурного дисбаланса пилотного канала.
6. Способ по п.1, в котором прием несмещенной обучающей последовательности включает в себя прием несмещенной обучающей последовательности по первой поднесущей;
в котором получение несмещенной оценки (Вm) квадратурного дисбаланса включает в себя получение оценки квадратурного дисбаланса для первой поднесущей;
причем способ дополнительно содержит этапы, на которых:
принимают квадратурно-модулированные данные связи по первой поднесущей в периоды символа, следующие после приема несмещенной обучающей последовательности;
генерируют обработанный символ (ус) для каждого символа данных связи; и
выводят оценки (Вm) квадратурного дисбаланса для каждого обработанного символа (ус).
7. Способ по п.1, дополнительно содержащий этапы, на которых:
умножают обработанный символ (у) на сопряженную величину опорного сигнала (р*); и
получают несмещенную оценку (h) канала на частоте +f.
8. Способ по п.7, в котором генерирование обработанных символов включает в себя обработку несмещенной обучающей последовательности, генерирующей последовательность обработанных символов (уm) на частоте -f;
причем способ дополнительно содержит этапы, на которых:
умножают символы (уm) на (рm*) для получения оценки hm канала на частоте -f; и
умножают символ уm на р* для получения оценки В квадратурного дисбаланса на частоте +f.
9. Способ по п.8, дополнительно содержащий этапы, на которых:
если отношение (SNR) сигнал-шум для (хm) больше, чем j, тогда рассчитывают символ (z)=y-(Bm/hm*)ym*, скорректированный по дисбалансу;
в противном случае, устанавливают (z), равным (у);
если SNR (х) больше, чем j, тогда рассчитывают (zm)=ym-(В/h*) у*;
в противном случае, устанавливают (zm), равным (уm); и используют (z) и (zm) при расчете (х) и (xm), соответственно.
10. Способ по п.9, в котором расчет (zm) и (z) включает в себя использование оценок (В) и (Вm) квадратурного дисбаланса, соответственно, если SNR больше, чем 1 (j=1).
11. Способ по п.13, в котором прием несмещенной обучающей последовательности включает в себя прием пары сигналов, включающей в себя опорный сигнал (р) с комплексным значением на частоте +f и зеркальный сигнал (рm) с комплексным значением на частоте -f, где произведение (р×рm) равно нулю.
12. Способ по п.11, в котором прием несмещенной обучающей последовательности включает в себя прием i экземпляров опорного сигнала (р) и зеркального сигнала (рm), где сумма произведений (рi×рim) равна нулю.
13. Система для удаления ошибок квадратурного дисбаланса в принимаемых данных, причем система содержит:
приемник с квадратурной демодуляцией, имеющий вход для приема несмещенной обучающей последовательности заранее определенных опорных сигналов (р) на частоте (+f) и заранее определенных зеркальных сигналов (pm) на частоте (-f) с однородной накопленной энергией, равномерно распределенной в комплексной плоскости, причем приемник генерирует последовательность обработанных символов (у) на частоте (+f), представляющий информацию в комплексной плоскости, в несмещенной обучающей последовательности, умножает каждые обработанные символы (у) на зеркальный сигнал (рm), выдает оценку (Вm) квадратурного дисбаланса на частоте (-f), и выводит скорректированные по дисбалансу символы, используя оценки квадратурного дисбаланса.
14. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность с множеством одновременно принятых заранее определенных опорных сигналов (рn) и множеством одновременно принятых заранее определенных зеркальных сигналов (pnm), генерирует множество обработанных символов (уn) из соответствующего множества опорных сигналов, умножает каждый обработанный символ на его соответствующий зеркальный сигнал и получает множество оценок (Вnm) канала из соответствующего множества произведений (уn)(рnm).
15. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность как временную последовательность символов в комплексной плоскости с одинаково накопленной энергией в множестве направлений.
16. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность с временной последовательностью из n заранее определенных опорных сигналов (рn) и n заранее определенных зеркальных сигналов (pnm), причем приемник генерирует временную последовательность из n обработанных символов (уn) из временной последовательности опорных сигналов, умножает каждый обработанный символ во временной последовательности на его соответствующий зеркальный сигнал, получает временную последовательность из n оценок (Вnm) квадратурного дисбаланса и усредняет n оценок квадратурного дисбаланса.
17. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность как Р пилотных символов на период символов во множестве периодов символа и получает несмещенных оценок Р пилотного канала, причем приемник одновременно принимает (N-P) квадратурно-модулированных символов данных связи в каждый период символа, генерирует обработанный символ (ус) для данных связи в каждый период символа, экстраполирует оценки каналов для каждого обработанного символа (ус) и выводит оценки (Вm) квадратурного дисбаланса для каждого обработанного символа (ус) из оценок квадратурного дисбаланса пилотного канала.
18. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность по первой поднесущей и выводит оценку (Вm) квадратурного дисбаланса для первой поднесущей, причем приемник принимает квадратурно-модулированные данные связи по первой поднесущей в периоды символа, следующие после приема несмещенной обучающей последовательности, генерирует обработанный символ (ус) для каждого символа данных связи и выводит оценки (Вm) квадратурного дисбаланса для каждого обработанного символа (ус).
19. Система по п.13, в которой приемник умножает обработанный символ (у) на сопряженную величину опорного сигнала (р*) и получает несмещенную оценку (hu) канала на частоте +f.
20. Система по п.19, в которой приемник обрабатывает несмещенную обучающую последовательность, генерируя последовательность обработанных символов (уm) на частоте -f, причем приемник умножает символ (ym) на (рm*) для получения оценки hm канала на частоте -f и умножает символ уm на р* для получения оценки В квадратурного дисбаланса на частоте +f.
21. Система по п.20, в которой приемник рассчитывает символ (z)=y-(Вm/hm*)ym*, скорректированный по дисбалансу, если отношение (SNR) сигнал-шум (xm) больше, чем j, и в противном случае устанавливает (z) равным (у), причем приемник рассчитывает (zm)=ym-(B/h*)y*, если SNR (х) больше, чем j, и в противном случае устанавливает (zm) равным (уm), причем приемник использует (z) и (zm) при расчете (х) и (хm), соответственно.
22. Система по п.21, в которой приемник рассчитывает (zm) и (z), включая использование оценок (В) и (Вm) квадратурного дисбаланса, соответственно, если SNR больше, чем 1 (j=1).
23. Система по п.13, в которой приемник принимает несмещенную обучающую последовательность как пару сигналов, включающую в себя опорный сигнал (р) с комплексным значением на частоте +f и зеркальный сигнал (рm) с комплексным значением на частоте -f, где произведение (p×pm) равно нулю.
24. Система по п.23, в которой приемник принимает несмещенную обучающую последовательность как i экземпляров опорного сигнала (р) и зеркального сигнала (рm), где сумма произведений (pi×pim) равна нулю.
25. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, которые при исполнении их процессором побуждают процессор выполнять этапы способа удаления ошибок квадратурного дисбаланса в принимаемых данных, причем инструкции содержат этапы, на которых:
принимают несмещенную обучающую последовательность в приемнике с квадратурной демодуляцией, причем несмещенная обучающая последовательность имеет однородную накопленную энергию, равномерно распределенную в комплексной плоскости, и включает в себя заранее определенные опорные сигналы (р) на частоте +f и заранее определенные зеркальные сигналы (рm) на частоте -f;
обрабатывают несмещенную обучающую последовательность, генерируя последовательность из обработанных символов (у) на частоте +f, представляющую информацию в комплексной плоскости в несмещенной обучающей последовательности;
умножают каждый обработанный символ (у) на зеркальный сигнал (рm);
получают несмещенную оценку Вm квадратурного дисбаланса на частоте -f, и
выводят скорректированные по дисбалансу символы, используя оценки квадратурного дисбаланса.
26. Устройство для удаления ошибок квадратурного дисбаланса в принимаемых данных, причем устройство содержит:
средство приема квадратурной демодуляции, имеющее вход для приема несмещенной обучающей последовательности заранее определенных опорных сигналов (р) на частоте (+f) и заранее определенных зеркальных сигналов (рm) на частоте (-f) с однородной накопленной энергией, равномерно распределенной в комплексной плоскости, причем средство приема генерирует последовательность обработанных символов (у) на частоте (+f), представляющую информацию в комплексной плоскости в несмещенной обучающей последовательности, умножает каждый обработанный символ (у) на зеркальный сигнал (рm), выдает оценку (Вm) квадратурного дисбаланса на частоте (-f), и выводит скорректированные по дисбалансу символы, используя оценки квадратурного дисбаланса.
27. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность с множеством одновременно принимаемых заранее определенных опорных сигналов (рn) и множеством одновременно принимаемых заранее определенных зеркальных сигналов (pnm), генерирует множество обработанных символов (yn) из соответствующего множества опорных сигналов, умножает каждый обработанный символ на его соответствующий зеркальный сигнал и получает множество оценок (Вnm) канала из соответствующего множества произведений (yn)(рnm).
28. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность как временную последовательность символов в комплексной плоскости с равной накопленной энергией во множестве направлений.
29. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность с временной последовательностью из n заранее определенных опорных сигналов (рn) и из n заранее определенных зеркальных сигналов (pnm), причем средство приема генерирует временную последовательность из n обработанных символов (уn) из временной последовательности опорных сигналов, умножает каждый обработанный символ во временной последовательности на его соответствующий зеркальный сигнал, получает временную последовательность из n оценок (Вnm) квадратурного дисбаланса и усредняет n оценок квадратурного дисбаланса.
30. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность как Р пилотных символов на период символа, во множестве периодов символов, и получает Р несмещенных оценок пилотного канала, причем средство приема одновременно принимает (N-P) квадратурно-модулированных символов данных связи в каждый период символа, генерирует обработанный символ (ус) для данных связи в каждый период символа, экстраполирует оценки каналов для каждого обработанного символа (уc) и выводит оценки (Вm) квадратурного дисбаланса для каждого обработанного символа (ус) из оценок квадратурного дисбаланса пилотного канала.
31. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность по первой поднесущей и выводит оценку (Вm) квадратурного дисбаланса для первой поднесущей, причем средство приема принимает квадратурно-модулированные данные связи по первой поднесущей в периоды символа, следующие после приема несмещенной обучающей последовательности, генерирует обработанный символ (ус) для каждого символа данных связи и выводит оценки (Вm) квадратурного дисбаланса для каждого обработанного символа (ус).
32. Устройство по п.26, в котором средство приема умножает обработанный символ (у) на сопряженную величину опорного сигнала (р*) и получает несмещенную оценку (hu) канала на частоте +f.
33. Устройство по п.32, в котором средство приема обрабатывает несмещенную обучающую последовательность, генерируя последовательность из обработанных символов (уm) на частоте -f, причем средство приема умножает символ (уm) на (рm*) для получения оценки hm канала на частоте -f и умножает символ уm на р* для получения оценки В квадратурного дисбаланса на частоте +f.
34. Устройство по п.33, в котором средство приема рассчитывает символ z=y-(Bm/hm*)ym* скорректированный по дисбалансу, если отношение (SNR) сигнал-шум (xm) больше, чем j, и в противном случае устанавливает (z) равным (у), причем средство приема рассчитывает (zm)=ym-(B/h*)y*, если SNR (х) больше, чем j, и в противном случае устанавливает (zm) равным (ym), причем средство приема использует (z) и (zm) при расчете (х) и (xm), соответственно.
35. Устройство по п.34, в котором средство приема рассчитывает (zm) и (z), включая использование оценок (В) и (Вm) квадратурного дисбаланса, соответственно, если SNR больше, чем 1 (j=1).
36. Устройство по п.26, в котором средство приема принимает несмещенную обучающую последовательность как пару сигналов, включающую в себя опорный сигнал (р) с комплексным значением на частоте +f и зеркальный сигнал (рm) с комплексным значением на частоте -f, где произведение (p×pm) равно нулю.
37. Устройство по п.36, в котором средство приема принимает несмещенную обучающую последовательность как i экземпляров опорного сигнала (р) и зеркального сигнала (рm), где сумма произведений (pi×pim) равна нулю.
38. Устройство обработки для удаления ошибок квадратурного дисбаланса в принимаемых данных, причем устройство обработки содержит:
модуль приема с квадратурной демодуляцией, имеющий вход для приема несмещенной обучающей последовательности из заранее определенных опорных сигналов (р) на частоте (+f) и заранее определенных зеркальных сигналов (рm) на частоте (-f) с однородной накопленной энергией, равномерно распределенной в комплексной плоскости, причем модуль приема генерирует последовательность обработанных символов (у) на частоте (+f), представляющую информацию в комплексной плоскости в несмещенной обучающей последовательности, умножает каждые обработанные символы (у) на зеркальный сигнал (рm), выдает оценку (Вm) квадратурного дисбаланса на частоте (-f) и выводит скорректированные по дисбалансу символы, используя оценки квадратурного дисбаланса.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| УСТРОЙСТВО И СПОСОБ РАЗНЕСЕНИЯ ПЕРЕДАЧИ С ИСПОЛЬЗОВАНИЕМ БОЛЕЕ ДВУХ АНТЕНН | 2001 |
|
RU2233032C2 |

