Изобретение относится к цепи согласно преамбуле пункта 1 формулы изобретения. Такая цепь для цепной передачи известна из WO 03093700. Недостаток известной передачи состоит в том, что исключение прямой направляющей, которая поддерживает криволинейные поверхности звеньев цепи до установки опоры в виде цилиндрической опорной поверхности, например в целях экономии расходов, может вызвать износ на углах криволинейных поверхностей. Этот износ вызван соударением края криволинейной поверхности на конце звена цепи о цилиндрическую опору, где соударение может вызвать очень высокий уровень напряжения в материале.
Для снижения износа криволинейной поверхности плоского соединительного звена создана цепная передача согласно отличительной части п.1 формулы изобретения. В месте соударения между плоским соединительным звеном и цилиндрической опорной поверхностью криволинейная поверхность и цилиндрическая опорная поверхность параллельны. Вследствие конструкции область, где цилиндрическая криволинейная поверхность сначала соударяется с цилиндрической опорной поверхностью, ограничена областью, которая образует угол от нуля до пятнадцати градусов с линией, перпендикулярной оси шарнира плоского соединительного звена, когда оно приближается к цилиндрической опорной поверхности. Касательная к криволинейной поверхности в месте соударения параллельна касательной к цилиндрической опорной поверхности, и по этой причине местоположение первого соударения с криволинейной поверхностью определяется касательной к криволинейной поверхности. В момент соударения направление оси шарнира более или менее параллельно оси звена, а поверхность области соударения с плоским соединительным звеном образует угол от нуля до пятнадцати градусов с осью звена. При наличии плоского соединительного звена в соответствии с п.1 радиус кривизны области соударения криволинейной поверхности значительно повышен и в результате это не приводит к ослаблению реакции опоры, которую криволинейная поверхность оказывает на плоское соединительное звено, в результате чего можно избежать усиления движения связок цепи. Повышение радиуса кривой приводит к сильному снижению контактного напряжения Герца, вследствие чего можно избежать избыточного напряжения и деформации плоского соединительного звена.
В соответствии с вариантом выполнения цепь соответствует пункту 2. При придании радиусу кривой размер примерно от четверти до половины ширины плоского соединительного звена, в месте соударения радиусу тем самым придается значительно больший размер, чем радиусу внутренней галтели, в результате чего контактное напряжение значительно снижается.
В соответствии с вариантом выполнения цепь соответствует пункту 3. Это приводит к дальнейшему повышению радиуса в местоположении соударения и к дальнейшему снижению контактного напряжения Герца.
В соответствии с вариантом выполнения цепь соответствует пункту 4. Таким образом, криволинейная поверхность поддерживает плоское звено цепи непосредственно на ее конце, вследствие чего из-за выпуклой формы криволинейной поверхности плоское соединительное звено не ударяется своим углом о цилиндрическую опорную поверхность.
В соответствии с вариантом выполнения цепь соответствует пункту 5. Таким образом, в штамповочных инструментах, используемых для изготовления плоских соединительных звеньев, можно избежать образования плоских углов, вследствие чего срок службы инструмента повышается.
В соответствии с вариантом выполнения цепь соответствует пункту 6. Таким образом, изготавливают асимметричные плоские соединительные звенья, что усиливает опору плоских соединительных звеньев в области, где звенья цепи движутся по направлению к цепному колесу, таким образом, считается, что усиление движения связок возникает в области, где звенья цепи движутся по направлению от цепного колеса.
В соответствии с вариантом выполнения цепь соответствует пункту 7. Это обеспечивает то, что оси шарнира при приближении к цепному колесу направлены прямо.
В соответствии с вариантом выполнения цепь соответствует пункту 8. Таким образом, звенья цепи можно поддерживать более стабильным способом. Далее изобретение разъяснено описанием нескольких вариантов выполнения изобретения с использованием чертежей. На чертежах:
Фиг.1 иллюстрирует сечение цепного колеса с цепью.
Фиг.2 иллюстрирует вид сбоку цепного колеса и цепи согласно Фиг.1.
Фиг.3 иллюстрирует частичный вид сверху цепного колеса и цепи согласно Фиг.1 и 2.
Фиг.4 иллюстрирует внешний контур варианта выполнения звена цепи.
Фиг.5 иллюстрирует схематический вид сбоку цепного колеса с цепью, имеющей звенья цепи согласно Фиг.4.
Фиг.6 иллюстрирует внешний контур первого варианта выполнения звена цепи согласно изобретению.
Фиг.7 иллюстрирует схематический вид сбоку цепного колеса с цепью, имеющей звенья цепи согласно Фиг.6.
Фиг.8 иллюстрирует внешний контур второго варианта выполнения звена цепи согласно изобретению.
Фиг.9 иллюстрирует схематический вид сбоку цепного колеса с цепью, имеющей звенья цепи согласно Фиг.8.
Фиг.10 иллюстрирует внешний контур третьего варианта выполнения звена цепи согласно изобретению.
Фиг.11 иллюстрирует схематический вид сбоку цепного колеса с цепью, имеющей звенья цепи согласно Фиг.10.
Фиг.12 иллюстрирует вид сбоку четвертого варианта выполнения звена цепи согласно изобретению.
Фиг.13 иллюстрирует схематический вид сбоку цепного колеса с цепью, имеющей звенья цепи согласно Фиг.12.
Фиг.1, 2 и 3 иллюстрируют цепь 3, входящую в зацепление с цепным колесом 9. Цепное колесо 9 может вращаться вокруг оси 10 цепного колеса и снабжено зубьями 7 цепного колеса. Цепное колесо 9 по обеим сторонам зубьев 7 имеет опорную поверхность 8, которая поддерживает цепь 3. Цепь 3 снабжена внутренними плоскими соединительными звеньями 2. Между двумя внутренними плоскими соединительными звеньями 2 имеются две втулки 1 цепи, и вместе с внутренними 2 плоскими соединительными звеньями втулки 1 цепи образуют внутренние звенья. Такой тип цепи называется втулочной цепью. Два внутренних звена соединены внешними плоскими соединительными звеньями 4, в которых использованы валики 5 цепи, таким образом внутреннее звено и внешние плоские соединительные звенья 4 могут вращаться вокруг оси 6 валика. Расстояние между двумя осями 6 валиков представляет собой шаг зубцов р. Цепное колесо 9 имеет множество зубьев 7 цепного колеса, которые входят в зацепление с втулками 1 цепи, вследствие чего оси 6 валиков при расположении вокруг цепного колеса 9 располагаются на начальной окружности 20 с радиусом Rpc. Внутренние плоские соединительные звенья 2 и внешние плоские соединительные звенья 4 поддерживаются на опорной 8 поверхности, которая имеет радиус Rss.
В ситуации, когда цепное колесо 9 является частью цепной передачи, оси 6 вращения валиков движутся по траекториям осей 11 валика. Вокруг цепного колеса 9 эти траектории 11 осей валиков движутся вдоль начальной 20 окружности, а между двумя цепными колесами оси 6 валиков движутся вдоль линии L, которая параллельна касательной линии, соединяющей начальные окружности цепных колес в цепной передаче.
Для специалистов в данной области техники должно быть ясно, что цепь 3, которая в показанном варианте выполнения образована в виде одной линии втулок 1 цепи, также может быть составлена в виде двух или трех линий втулок 1 цепи. Такие цепи известны как дуплексные цепи и триплексные цепи, таким образом, цепные 9 колеса проектируют в соответствии с этим. Для поддержания звеньев цепи вдоль прямой линии, без перекашивания в цепи 3 и для ограничения напряжения в валиках 5 цепи в этих типах цепи, плоские звенья 2 и 4 цепи поддерживаются на опорной 8 поверхности по обеим сторонам втулки 1 цепи.
Фиг.4 иллюстрирует внешнюю периферийную окружность плоского соединительного звена 12. Плоское соединительное звено 12 можно использовать в качестве внутреннего плоского соединительного звена 2 или в качестве внешнего соединительного звена 4, и оно в продольном направлении имеет ось 13 звена цепи, которая пересекает ось 6 втулки. На конце своей продольной стороны 14 плоское соединительное звено 12 имеет криволинейную поверхность 15. Вблизи конца плоского соединительного звена 12 криволинейная поверхность 15 более или менее параллельна оси 13 звена цепи, вследствие чего ось 6 втулки направлена по более или менее прямолинейной траектории, когда криволинейная поверхность 15 плоского соединительного звена 12 поддерживается на опорной поверхности 8 цепного колеса 9 (см. далее). Плоское соединительное звено 12 заканчивается в концевой стороне 16, а угол между криволинейной поверхностью 15 и концевой стороной 16 скруглен за счет галтели с радиусом галтели Rf и с центром 23 радиуса галтели. В показанном варианте выполнения все четыре угла плоского соединительного звена 12 имеют криволинейную поверхность 15. Однако если цепь 3 используется в цепной передаче с двумя цепными колесами, то можно обеспечить только одну продольную сторону 14 на обоих концах с криволинейными поверхностями 15, и если цепь 3 движется только в одном направлении, будет достаточно только одной криволинейной поверхности 15.
Плоское соединительное звено 12 согласно раскрытому варианту выполнения имеет радиус галтели Rf, который является следствием способа получения плоского соединительного звена 12. В ситуации, когда плоское соединительное звено 12 выштамповано с помощью вырубного штампа, радиус галтели Rf определяет износ, который возникает в данной детали. Для практических целей радиус галтели Rf может составлять приблизительно 0,5-1,5 мм. Фиг.4 иллюстрирует плоское соединительное звено 12 с шагом 8 мм, с радиусом галтели Rf 0,5 мм.
Фиг.5 более подробно иллюстрирует, как цепь 3 со звеньями 12 цепи контактирует с цепным колесом 9. Фиг.5 иллюстрирует ситуацию, когда звено А цепи с внешним 4 плоским соединительным звеном, показанным на Фиг. с левой стороны, перемещается в направлении V к цепному колесу 9. Со стороны, обращенной от цепного колеса 9, т.е. с нерабочей стороны, звено А цепи соединено со звеном цепи, которое не связано с цепным колесом 9, а с другой стороны, - с его ведущей стороны, звено А цепи соединено со звеном В цепи внутренним плоским соединительным звеном 2. Криволинейная 15 поверхность звена В цепи поддерживается опорной поверхностью 8, вследствие чего ось 6 валика его ведущей стороны находится в позиции Р3 приблизительно на начальной окружности 20.
В процессе своего движения в направлении V ось 6 ведущего валика звена В цепи более или менее следует в соответствии с движением начальной окружности 20 вдоль кривой 19. Эта кривая 19 начинается в точке Р2 касания, которая находится приблизительно в месте, где касательная L линия соприкасается с начальными окружностями двух цепных колес, соединенных концами цепи 3 с начальной 20 окружностью. Из-за натяжения цепи 3 задняя поворотная 6 ось В цепи, которая также является ведущей 6 поворотной осью звена А цепи, следует вдоль кривой 17 от касательной L линии в направлении опорной 8 поверхности. Кривая 17 параллельна кривой 19 из-за одинакового вертикального положения ведущего валика 6 и заднего валика 6 звена В цепи, и это заставляет звено А цепи двигаться по направлению к опорной 8 поверхности до соприкосновения криволинейной поверхности 15 плоского соединительного звена 4 с опорной поверхности в точке S соударения. Общая поворотная ось 6 звеньев цепи А и В попадает затем в позицию Р1. Когда затем звенья А и В перемещаются в направлении V, общая ось 6 движется вдоль кривой 18 по направлению к линии L, касательной к начальной окружности. Кривая 18 более или менее параллельна начальной окружности 20. Сила криволинейной поверхности 15 плоских соединительных звеньев, опирающихся об опорную поверхность 8, ограничивает хордальное движение, перпендикулярное линии L цепи 3 между двумя цепными колесами, и в этом случае максимальное хордальное движение вблизи цепного колеса 9 обозначено как хордальное перемещение а. Должно быть ясно, что форма криволинейной поверхности 15 влияет на траектории 18 и 19 осей 6 валиков, вследствие чего они будут слегка отличаться от траектории начальной окружности 20 с поддержанием постоянной скорости движения осей 6 валиков вдоль линии L и при движении вокруг цепного колеса 9. Это раскрыто в WO 03093700.
Точка соударения S на опорной 8 поверхности находится на радиусе 21 относительно оси 10 цепного колеса, а точка Р2 касания находится на радиусе 22 относительно оси 10 цепного колеса. Радиус 21 и радиус 22 образуют угол α1. На звене цепи, из точки S соударения опущен перпендикуляр 25 на поверхность звена цепи. Перпендикуляр 25 образует угол α2 с линией 24, перпендикулярной оси 13 звена цепи. Поскольку соударение имеет место на поверхности галтели, центр 23 радиуса галтели находится на перпендикуляре 25. Из-за ситуации, при которой в момент соударения ось 13 звена цепи более или менее перпендикулярна радиусу 22, угол α1 и угол α2 более или менее равны. Если количество звеньев цепи, которое можно устанавливать вокруг цепного колеса 9, составляет z, то угол γ подъема равен 360 градусов, деленных на z. Ясно, что угол α1 составляет менее половины угла γ подъема, и в большинстве случаев угол α1 составляет менее семи-двенадцати градусов.
Является предпочтительным, чтобы радиус Rf галтели был как можно более мелким, для достижения как можно более крупной криволинейной поверхности 15 по направлению к концевой стороне 16 плоского 12 соединительного звена, для уменьшения хордального перемещения а. Однако меньший радиус Rf галтели повышает контактное напряжение Герца в точке соударения S, вследствие чего при максимальных скоростях цепи 3 или при повышенных осевых силах цепи может возникнуть пластическая деформация или износ плоских соединительных звеньев. Такие деформации или износ приводят к повышенному шуму, вибрации и сниженному сроку службы цепной передачи и должны быть исключены. Для снижения риска пластической деформации радиус в точке S соударения повышен. Контактное напряжение Герца пропорционально обратной величине корня квадратного из радиуса. Поэтому деформация и износ значительно понижаются при ограниченном повышении радиуса в месте контакта. Было обнаружено, что к углу, который включает в себя угол α1, должен быть приложен повышенный радиус, но он не должен быть намного больше, чтобы криволинейная 15 поверхность была уменьшена не намного и чтобы хордальный ход был сильно повышен.
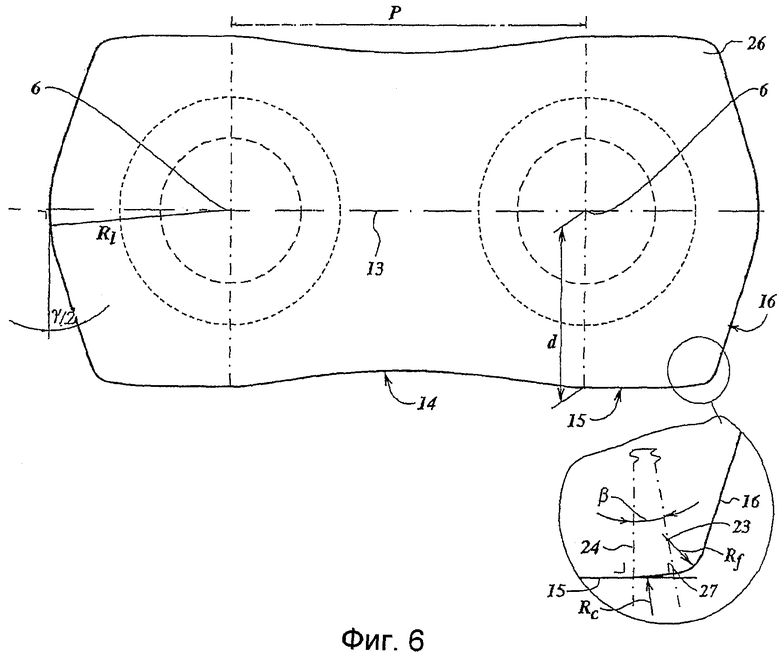
Фиг.6 иллюстрирует вариант выполнения изобретения, в котором внешняя периферия плоского соединительного звена 26 имеет дополнительную кривую по сравнению с плоским соединительным звеном 12. По направлению к концевой стороне 16 криволинейная поверхность 15, более или менее параллельная оси 13 звена цепи, образует кривую 27 с радиусом Rc кривой, и на конце кривой 27 криволинейная поверхность заканчивается в виде галтели с радиусом Rf галтели, направленным к концевой стороне 16 плоского соединительного звена 26. Кривая 27 является касательной к криволинейной поверхности 15 и образует увеличенный угол с осью 13 звена цепи и имеет угол наклона β. Максимальное значение угла наклона β составляет приблизительно половину от угла γ подъема и имеет, как правило, более семи градусов. В направлении, перпендикулярном оси 13 звена цепи, расстояние от оси 6 валика до криволинейной поверхности 15 равно расстоянию d. Является предпочтительным, чтобы радиус Rc кривой был больше или равен половине расстояния d, таким образом, он значительно больше радиуса Rf галтели. При выполнении этого контактное напряжение Герца становится приемлемым. В данном варианте выполнения кривая 27 показана как часть окружности с радиусом Rc. Также возможно, чтобы кривая имела другую форму до тех пор, пока она имеет радиус кривизны, по меньшей мере, равный радиусу кривизны Rc.
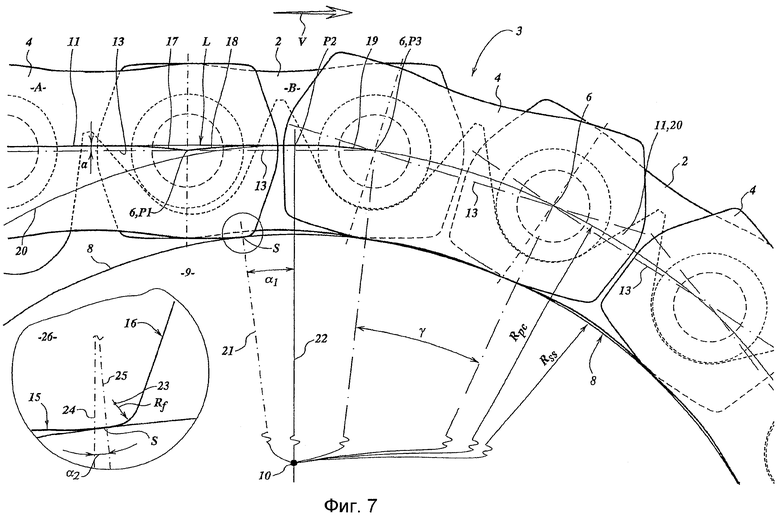
Фиг.7, аналогично Фиг.5, иллюстрирует момент соударения звена А цепи с опорной поверхностью 8, таким образом, цепь 3 имеет плоские соединительные звенья 26, как показано на Фиг.6. Перпендикуляр 25 к поверхности в точке S соударения образует угол α2 с перпендикуляром к оси 13 звена цепи. Поскольку угол меньше угла β, поверхность в точке S соударения имеет радиус Rc, а центр радиуса 23 галтели находится на перпендикуляре 25 к концевой стороне 16 звена. Радиус Rc в точке S соударения является достаточным для предотвращения возникновения контактного напряжения Герца в точке S соударения. Из-за ограниченного угла β хордальный ход а усиливается очень слабо.
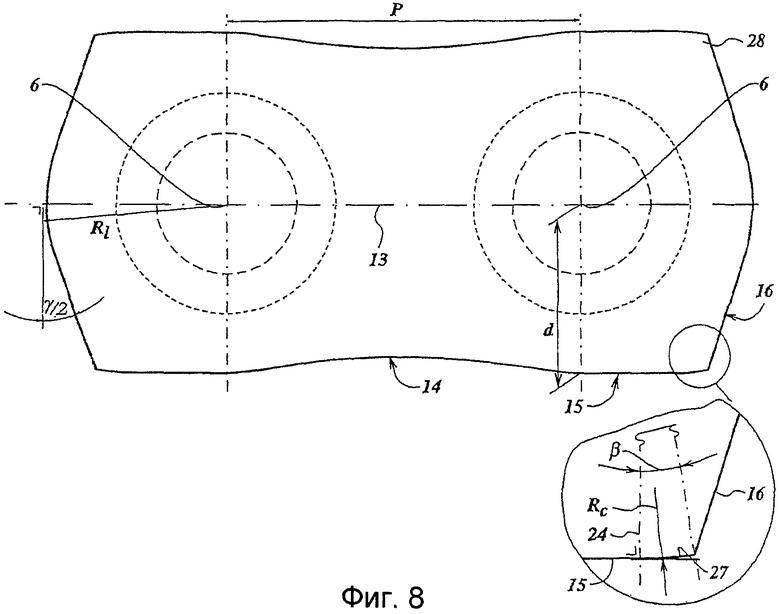
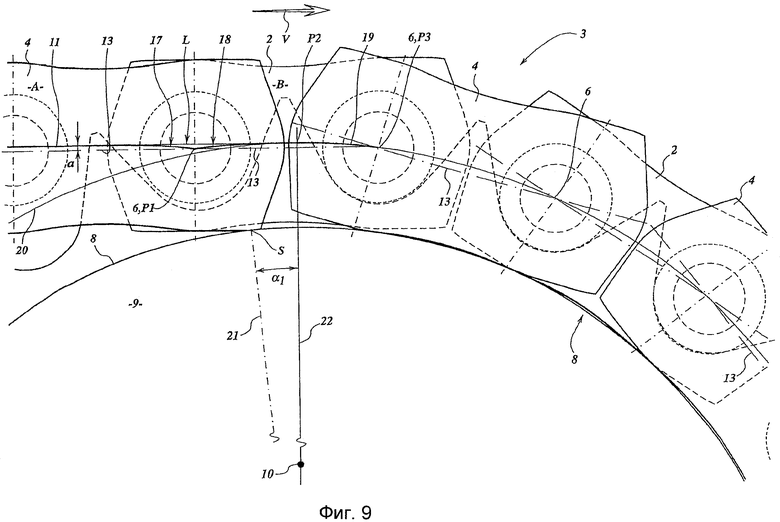
Фиг.8 иллюстрирует вариант выполнения изобретения, в котором внешняя периферия плоского соединительного звена 28 имеет дополнительную кривую по сравнению с плоским соединительным звеном 12, аналогично варианту выполнения согласно Фиг.6, и в котором отсутствует галтель, соединяющая кривую 27 с концевой стороной 16 звена. Исключение галтели возможно, когда плоские соединительные звенья 28 изготовлены в соответствии с адаптированными процессами, известными специалистам в данной области техники, например, при последовательном перфорировании продольной и концевой стороны плоского соединительного звена 28. Такой процесс может слегка повышать производственные расходы, но, тем не менее, имеет преимущество, состоящее в том, что хордальный ход а дополнительно снижается. Фиг.9 иллюстрирует момент соударения звена А цепи с опорной поверхностью 8, таким образом, цепь 3 имеет плоское соединительное звено 28, как показано на Фиг.8. Вследствие исключения галтели хордальный ход а по сравнению с хордальным ходом, показанным на Фиг.7, дополнительно снижается при аналогичном радиусе Rc в точке S соударения.
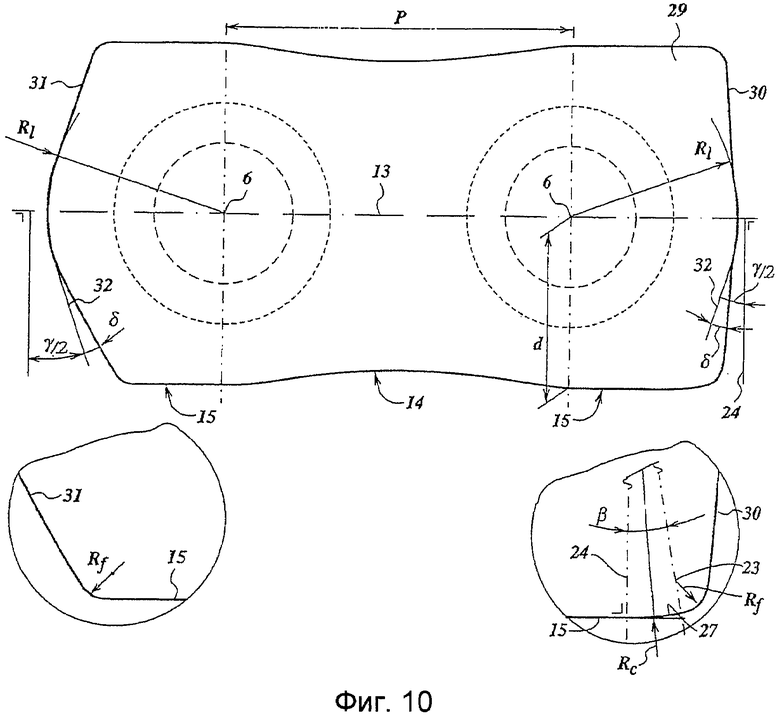
Фиг.10 иллюстрирует вариант выполнения изобретения, в котором внешняя периферия плоского соединительного звена 29 содержит дополнительную кривую с радиусом, меньшим или равным Rc, оканчивающимся в галтели, например, в плоском соединительном звене 26. Для уменьшения хордального хода плоское соединительное звено 29 имеет криволинейную поверхность 15 повышенной длины на ведущей стороне 30 плоского соединительного звена 29 и криволинейную поверхность 15 уменьшенной длины на задней стороне 31. Это означает, что плоское соединительное звено 29 является асимметричным. Как следствие асимметричности плоского 29 соединительного звена, хордальный ход а снижен только в одном направлении движения V, а в противоположном направлении движения хордальный ход а цепи имеет место, то есть он слегка повышен, но по существу он меньше, чем у цепной передачи без криволинейной поверхности 15. В ситуации, когда цепные колеса вращаются только в одном направлении, это более сильное хордальное движение происходит в части цепной передачи, где звенья цепи движутся по направлению от цепного колеса и где соударение не происходит. В этом местоположении натяжение цепи низкое, вследствие чего более сильное хордальное движение не приводит к значительному повышению шума и к неприемлемому износу и вибрациям.
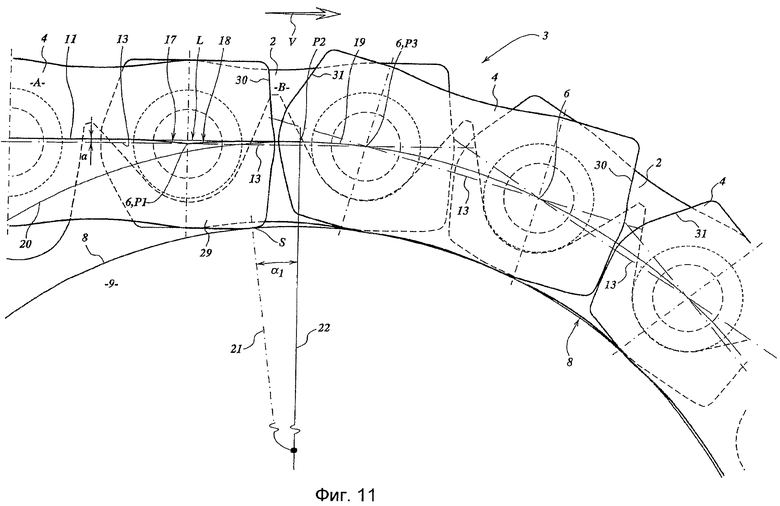
В описанных ранее плоских соединительных звеньях 12, 26, 28 и 29, см. Фиг.4, 6, 8 и 10, концевые стороны 16 вблизи оси 13 звена цепи имеют изгиб радиусом R1 и простираются по направлению к продольным сторонам 14 по касательной к этому радиусу R1, который образует угол с перпендикуляром 24, опущенным на ось 13 звена цепи, и этот угол равен половине угла γ подъема. Направление этой касательной на Фиг.10 обозначено линией 32. Радиус R1 имеет длину, чуть меньшую, чем половина шага р. Таким образом, существует зазор между плоскими соединительными звеньями вблизи оси 13 звена цепи, а плоские соединительные звенья 12, 26, 28, когда они расположены вокруг цепного колеса 9, не касаются друг друга. Для достижения того же самого результата с плоским соединительным звеном 29 ведущая сторона 30 образует угол с перпендикуляром 24, который представляет собой угол δ головки зуба, составляющий менее половины угла γ подъема, а задняя сторона 31 образует угол с перпендикуляром 24, который представляет собой угол δ головки зуба, составляющий более половины угла γ подъема. Вблизи криволинейной поверхности 15 ведущая сторона 30 заканчивается галтелью, радиусом Rf, и кривой 27, аналогично Фиг.6. Вблизи криволинейной поверхностью 15 задняя сторона 31 оканчивается галтелью, радиусом Rf, а в кривой 27 нет необходимости, поскольку цепь будет перемещаться только в направлении V. Фиг.11 иллюстрирует момент соударения звена А цепи с опорной поверхностью 8, на которой расположена цепь 3, имеющая плоские соединительные звенья 29, как показано на Фиг.10. Из-за асимметрии хордальный ход дополнительно снижен по сравнению с хордальным ходом, показанным на Фиг.7, на которой радиус Rc в точке S контакта аналогичный.
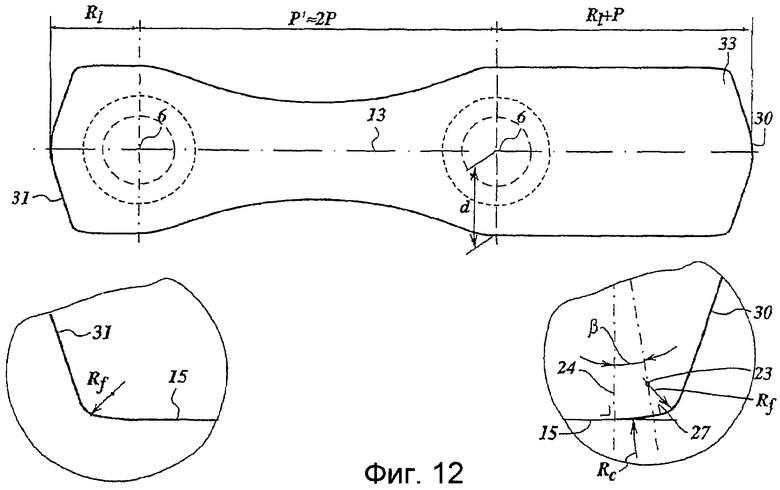
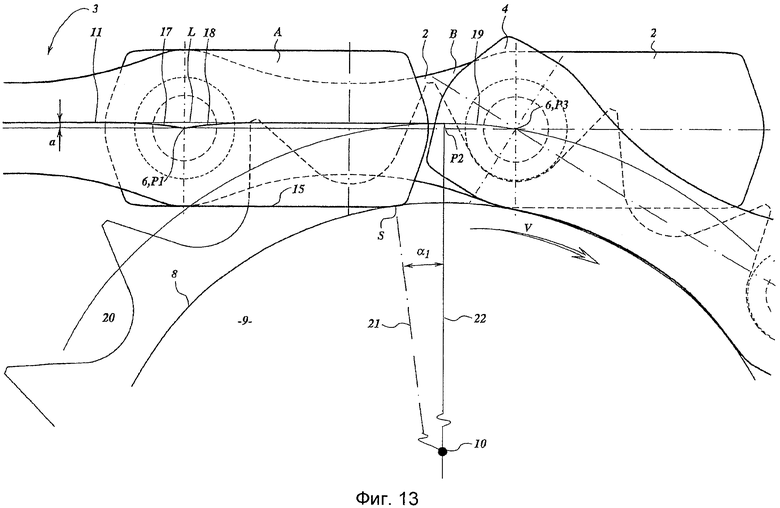
Фиг.12 иллюстрирует еще один вариант выполнения изобретения. Асимметричное плоское соединительное звено 33 более или менее сходно с плоским соединительным звеном 26, за исключением того, что оно имеет шаг р', который имеет длину, равную сумме длины шага р из ранее показанных вариантов выполнения и дополнительной длины, которая приблизительно равна шагу р плоского соединительного звена 26, и имеет ту же ширину, вследствие чего максимальные силы передачи в цепи более или менее равны при использовании половины от количества звеньев цепи и того же цепного колеса 9. Кроме того, опорная поверхность 8 и количество зубьев 7 цепного колеса 9 более или менее равно, вследствие чего используется только каждый второй зуб. Тот же эффект можно получать с использованием цепного колеса с уменьшенным количеством зубьев. Расстояние между ведущей стороной 30 и осью 6 ведущего валика также повышается с повышением шага р плоского соединительного звена 26. Расстояние между задней стороной 31 и осью 6 заднего валика не изменяется. В направлении ведущей стороны 30 криволинейная поверхность 15 заканчивается кривой 27 и галтелью с радиусом Rf, в направлении задней стороны 31 криволинейная поверхность 15 заканчивается галтелью Rf. Фиг.13 иллюстрирует цепь 3 с плоскими соединительными звеньями 33, имеющими форму, описанную на Фиг.12. Вследствие использования асимметричной формы плоских соединительных звеньев 33 хордальный ход а мал, что, таким образом, делает возможным снижение себестоимости благодаря сниженному количеству валиков 6 цепи и втулок 1 цепи без увеличения хордального хода, износа, шума и вибраций.
В обсуждаемых вариантах выполнения показаны цепные колеса 9 с зубьями 7. Должно быть понятно, что для ослабления хордального перемещения по цепным колесам используют только опорную поверхность 8. В ситуациях, когда колеса используются в качестве направляющих колес без зубьев, такое ослабление хордального движения получают с использованием опорной поверхности 8 и криволинейной поверхности 15 на звеньях цепи.
Вышеуказанные варианты выполнения разъясняют изобретение с использованием примера втулочной цепи. Проект плоских соединительных звеньев, которые взаимодействуют с цилиндрической подложкой на цепном колесе, можно использовать для других типов цепей, таких как роликовые цепи, цепи Флейера и цепи Голла, а также для цепей, работающих совместно с колесами цепной передачи без зубьев или имеющих одно внутреннее плоское соединительное звено и два внешних плоских соединительных звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕПНАЯ ПЕРЕДАЧА И ЦЕПЬ | 2003 |
|
RU2318145C2 |
| ЦЕПЬ ПРОТИВОСКОЛЬЖЕНИЯ С НАПРАВЛЯЮЩИМИ ЦЕПЯМИ, ОБЛАДАЮЩИМИ БОКОВОЙ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2599736C2 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ШАРНИРЫ КАЧЕНИЯ С ШАРЖИРОВАННЫМИ ПОВЕРХНОСТЯМИ | 2009 |
|
RU2472050C2 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ОТКРЫТЫЕ ШАРНИРЫ КАЧЕНИЯ С ЦИЛИНДРИЧЕСКОЙ ФОРМОЙ ЭЛЕМЕНТА ЗАЦЕПЛЕНИЯ | 2009 |
|
RU2472049C2 |
| ПЛАСТИНЧАТАЯ ЦЕПЬ | 2009 |
|
RU2490530C2 |
| ЗВЕНЬЕВАЯ ЦЕПЬ ДЛЯ ЦЕПНЫХ КОНВЕЙЕРОВ И ГОРИЗОНТАЛЬНЫЕ ЗВЕНЬЯ ЦЕПИ ДЛЯ НЕЕ | 2009 |
|
RU2448889C1 |
| ЗВЕНЬЕВАЯ ЦЕПЬ ДЛЯ ЦЕПНЫХ КОНВЕЙЕРОВ И ЕЕ ГОРИЗОНТАЛЬНЫЕ ЦЕПНЫЕ ЗВЕНЬЯ | 2010 |
|
RU2499755C2 |
| ПРОВОДЯЩИЙ СЛОЙ БОЛЬШОЙ ПОВЕРХНОСТИ ДЛЯ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ С ИСПОЛЬЗОВАНИЕМ ЕМКОСТНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2012 |
|
RU2609572C2 |
| ЗВЕНЬЕВАЯ ЦЕПЬ ДЛЯ ЦЕПНЫХ КОНВЕЙЕРОВ | 2006 |
|
RU2384507C2 |
| ЦЕПЬ И ЕЕ ЗВЕНО | 1994 |
|
RU2036347C1 |
Изобретение относится к цепным передачам. Цепь содержит звенья (2, 4), соединенные параллельными валиками цепи. Каждое звено цепи имеет по меньшей мере одно плоское соединительное звено. Валики цепи образуют поворотные оси (6) для плоских соединительных звеньев. Ось (13) звена цепи перпендикулярно пересекает две поворотные оси. Упомянутые плоские соединительные звенья имеют простирающуюся по меньшей мере к одной концевой стороне (16) плоского соединительного звена криволинейную поверхность (15), предназначенную для поддержания плоского соединительного звена на цилиндрических опорных поверхностях (8) зубчатого колеса (9). Криволинейная поверхность оканчивается в выпуклой криволинейной поверхности с углом наклона, возрастающим вблизи концевой стороны, с осью звена, проходящей через нее таким образом, что в результате угол наклона повышен по меньшей мере до половины угла начального конуса (γ) или по меньшей мере до семи градусов. Изобретение позволяет снизить износ цепи. 6 з.п. ф-лы, 13 ил.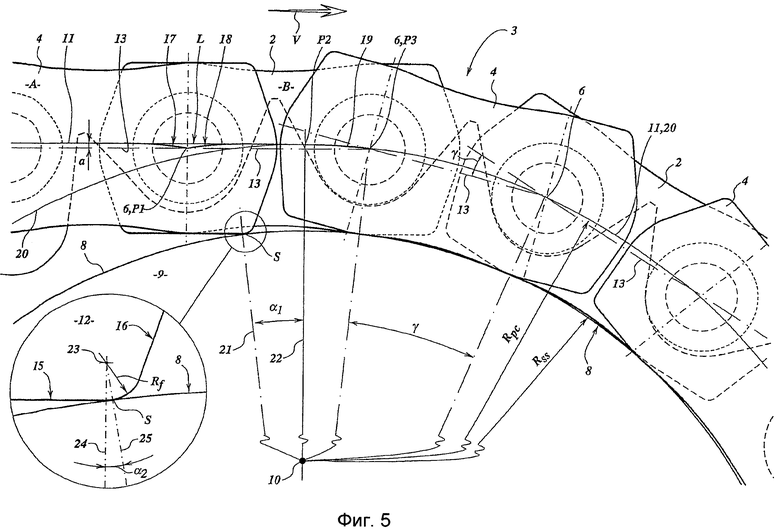
1. Цепь для цепной передачи со звеньями (А, В) цепи, соединенными параллельными валиками (5) цепи, причем каждое звено цепи имеет по меньшей мере одно плоское соединительное звено (2, 4, 12, 26, 28, 29, 33), а валики цепи образуют поворотные оси (6) для плоских звеньев цепи с величиной шага (р, р'), в результате чего ось (13) звена цепи перпендикулярно пересекает две поворотные оси, причем упомянутые плоские соединительные звенья имеют вблизи по меньшей мере одной концевой стороны (16) плоского соединительного звена на конце продольной стороны (14) криволинейную поверхность (15), которая пригодна для поддержания плоского соединительного звена на цилиндрической опорной поверхности (8) цепного колеса (9) с углом (γ) подъема, отличающаяся тем, что в направлении концевой стороны (16) всех плоских соединительных звеньев (2, 4, 12, 26, 28, 29, 33) криволинейная поверхность (15) имеет выпуклую криволинейную поверхность (27) с радиусом кривизны (Rc), большим или равным половине расстояния (d) от оси (13) звена цепи до криволинейной поверхности (15), и выпуклая криволинейная поверхность имеет в направлении концевой стороны (16) возрастающий угол (β) наклона с осью звена, причем угол наклона повышен по меньшей мере до половины угла (γ) подъема или по меньшей мере до семи градусов.
2. Цепь согласно п.1, в которой радиус кривизны (Rc) составляет по меньшей мере удвоенное расстояние (d) от оси (13) звена цепи до криволинейной поверхности (15).
3. Цепь согласно п.1, в которой выпуклая криволинейная поверхность (27) образует угол с концевой стороной (16) плоского соединительного звена (12; 26; 28; 29; 33).
4. Цепь согласно п.3, в которой угол является скругленным с радиусом (Rf) галтели, причем является предпочтительным, чтобы радиус галтели составлял по меньшей мере 0,5-1,5 мм.
5. Цепь согласно п.1, в которой криволинейные поверхности (15) вблизи различных поворотных осей (6) имеют различные длины.
6. Цепь согласно п.1, в которой криволинейная поверхность (15) на части ее длины параллельна оси (13) звена цепи.
7. Цепь согласно п.1, в которой каждое звено цепи имеет по меньшей мере два плоских соединительных звена (12; 26; 28; 29; 33), которые разделены втулкой (1) цепи вблизи каждой поворотной оси (6).
| Устройство для намотки и съема ленты с конвейера | 1984 |
|
SU1175812A1 |
| ЕР 0833078 A1, 01.04.1998 | |||
| Устройство для регулирования напряженияВ элЕКТРичЕСКиХ СЕТяХ | 1979 |
|
SU799074A1 |
| Цепной привод | 1982 |
|
SU1203281A1 |

