Изобретение относится к цепной передаче согласно ограничительной части пункта 1 формулы изобретения. Цепная передача данного типа известна из WO 97/31846.
Цепные передачи широко используются в машиностроении для передачи вращения без проскальзывания, например, при управлении распределительным валом двигателя внутреннего сгорания.
Существует множество конструкций цепных передач. Цепная передача обычно имеет конструкцию с бесконечной цепью, которая вращается вокруг, по меньшей мере, двух звездочек, в то время как, если это целесообразно, может быть установлено устройство натяжения цепи, чтобы натягивать цепь вокруг звездочек.
Звенья цепи могут быть образованы множеством способов, но обычно содержат ряд накладок звеньев, которые соединены по порядку с помощью поворотных осей. Часто каждое звено содержит, по меньшей мере, две накладки, которые соединены в параллель, и каждая имеет отверстия, которые расположены на расстоянии друг от друга в продольном направлении цепи и соединены с помощью поворотных осей, которые расположены перпендикулярно по отношению к продольному направлению цепи. Накладки звеньев в этом случае расположены с определенным расстоянием между ними, с тем, чтобы полость привода, в которую может быть принят зуб звездочки, была образована между накладками звеньев и поворотными осями. В этом случае цепь часто содержит последовательное соединение внутренних звеньев и наружных звеньев, причем в каждом случае накладки наружных звеньев перекрывают накладки внутренних звеньев на поворотных осях. В случае втулочной цепи накладки внутреннего звена соединены друг с другом посредством двух втулок, а накладки наружного звена соединены друг с другом посредством осей, которые монтируют с возможностью вращения во втулках внутренних звеньев. В так называемой роликовой цепи износ между боковой поверхностью зуба звездочки и втулкой уменьшают установкой ролика около втулки.
Как и зубчатую передачу, цепную передачу можно использовать для получения определенного номинального постоянного передаточного отношения. Это отношение между частотой вращения ведомой звездочки и частотой вращения ведущей звездочки. Преимущество цепной передачи над зубчатой передачей в том, что у нее сравнительно низкая себестоимость.
Однако одним из недостатков цепной передачи является то, что мгновенное передаточное отношение не является постоянным. Это вызвано тем фактом, что цепь составлена из звеньев, которые расположены вокруг звездочки, как хорды, и при этом цепь тянет звездочку с колеблющимся радиусом. Это явление, известное специалисту в данной области техники, как эффект многоугольника, не только приводит к износу и вибрациям, но также вызывает достаточно высокий уровень шума. Эффект многоугольника особенно разрушителен в звездочках со сравнительно малым числом зубьев, например менее 20 зубьев.
Чтобы нейтрализовать эффект многоугольника, в WO 97/31846 предложено направлять цепь с помощью направляющей поверхности, которая расположена вблизи звездочки, путем взаимодействия с частями цепи на протяжении участка зацепления. С помощью направляющей поверхности, которая установлена в фиксированном положении, цепь направляют по звездочке перед зацеплением, во время и после него. В этом случае цепь направляется таким образом, что оси поворота осей цепи описывают заданную, криволинейную и достаточно плавную кривую относительно внешнего мира таким образом, что скорость поворота оси на определенном расстоянии от звездочки всегда имеет постоянную величину, когда звездочка вращается с постоянной скоростью. В таком случае передаточное отношение является полностью постоянным. На этой криволинейной траектории радиус кривизны криволинейной траектории на протяжении участка зацепления почти непрерывно убывает от почти бесконечного на прямолинейном участке криволинейной траектории до радиуса начальной окружности звездочки. В частности, криволинейная траектория приближается к начальной окружности зубьев звездочки снаружи через криволинейный участок траектории.
Недостатком известного цепного привода является то, что, когда он проходит по криволинейной траектории, звенья цепи осуществляют непрерывно дополнительно поворот друг относительно друга, в результате чего сила контакта между цепью и направляющей поверхностью непрерывно возрастает. Соответственно, в процессе работы возрастает контактное напряжение Герца в мгновенной точке контакта на направляющей поверхности. Если нужно передавать большие механические мощности, и если частоты вращения высоки, контактное напряжение Герца может стать недопустимо высоким. При более высоких мощностях и частотах вращения износ в результате может оказаться таким сильным, что срок службы цепи и направляющей поверхности является неприемлемо коротким. Кроме того, происходят потери на механическое трение, и вырабатывается дополнительный шум, что также неблагоприятно.
Задачей изобретения является создание цепной передачи описанного во введении типа, в которой устранены вышеупомянутые недостатки, в то время как упомянутые достоинства сохранены. С этой целью цепная передача по изобретению сконструирована в соответствии с пунктом 1 формулы изобретения. Результатом этого является то, что оси поворота следуют по траектории, которая является желаемой, с целью освободиться от эффекта многоугольника, в то время как относительное смещение опорных средств цепи и вращающейся опоры, которые при этом взаимодействуют, мало или отсутствует, с тем, чтобы устранить износ и шум.
Согласно усовершенствованию, цепная передача сконструирована согласно пункту 2. Это облегчает изготовление устойчивой опоры для звеньев.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 3. Таким образом, траектория цепи определена с большей точностью, причем эффект многоугольника в таком случае устранен в наибольшей степени.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 4. Это облегчает получение возможности направления цепи таким образом, что эффект многоугольника устраняется.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 5. Результатом этого является то, что звенья имеют непрерывную опору, когда они приближаются к звездочке, и не допускается столкновение звеньев со звездочкой, так что износ и избыточное шумовое загрязнение ограничены.
Следует отметить, что опорные средства, упомянутые выше, наиболее эффективны вблизи звездочки со сравнительно малым числом зубьев (например, 16 зубьев или меньше), так как это тот случай, когда вибрации, возникающие из-за эффекта многоугольника, являются наибольшими. Это означает, что в цепной передаче с малой звездочкой и большой звездочкой (например, привод распределительного вала двигателя внутреннего сгорания) стационарными направляющими вблизи большой звездочки можно пренебречь. В таком случае механическая инерция цепи и натяжение цепи образуют средства, которые обеспечивают, чтобы поворотные оси следовали по прямолинейному участку криволинейной траектории.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 6. Это облегчает позиционирование в направлении вращения цепи по отношению к звездочке, причем в то же время устраняет необходимость использования зубьев звездочки, помещенных между звеньями, и позволяет диаметрам поверхностей скольжения опор в осевых стержнях цепи быть больше. Это уменьшает износ цепи.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 7. Результатом этого является то, что приводные средства могут функционировать независимо от опорных средств, так что их можно оптимизировать независимо друг от друга.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 8. Это еще более упрощает конструкцию цепи и звездочки, делая возможным снабдить стороны или центральную часть цилиндрической стенки звездочки выступами или канавками. Конструирование сторон как отдельного компонента дает возможность снабдить выступами или канавками либо стороны, либо центральную часть, что позволяет сэкономить на производственных расходах.
Согласно дальнейшему усовершенствованию, цепная передача сконструирована согласно пункту 9. Результатом этого является цепь, которая проще в изготовлении.
Изобретение также включает в себя цепь согласно пункту 10. Цепь данного типа подходит для цепных передач, описанных выше, а также для использования в качестве цепи, которую нужно направлять вокруг звездочки, в то время как к звездочке приложена только сила, но нет момента. В этой передаче также устранены вибрации и подобные им явления, так как эффект многоугольника не возникает.
Согласно усовершенствованию цепи, последняя сконструирована согласно пункту 11. Это делает возможным использовать цепь с двух сторон, что может быть выгодно, если используется направляющий аппарат для отвода цепи в структуре. Также цепь можно переворачивать после того, как опорные поверхности становятся изношенными, с тем, чтобы на звездочки опирались опорные поверхности другой стороны.
Изобретение будет более подробно объяснено на основе ряда типичных воплощений, которые показаны на чертежах, в которых:
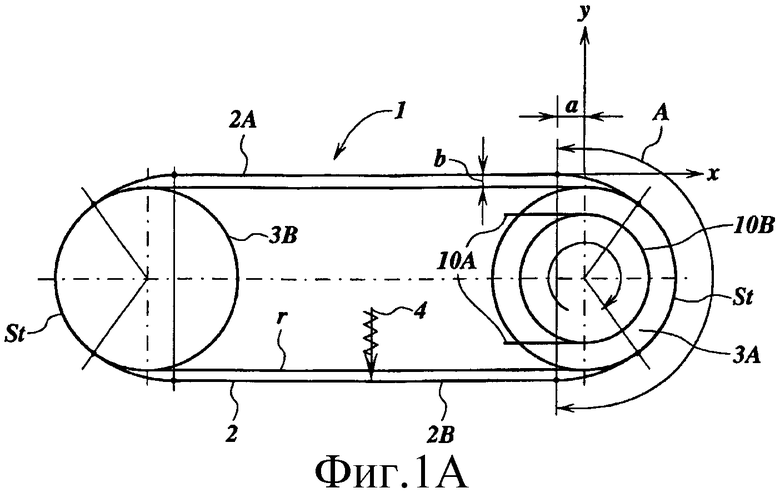
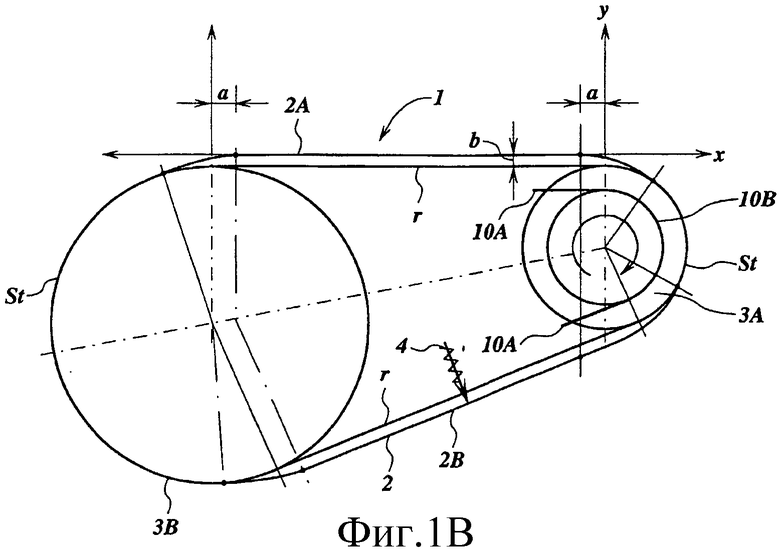
на Фиг.1А и 1В схематично изображены криволинейные траектории цепной передачи с передаточным отношением, которое соответственно равно 1 и не равно 1;
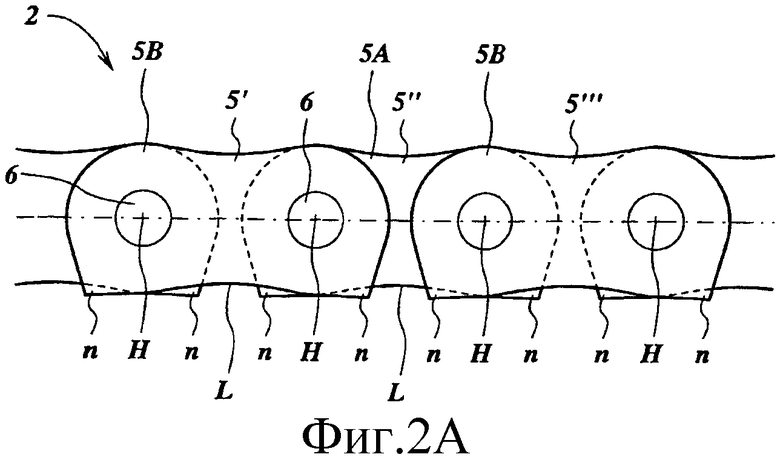
на Фиг.2А и 2В соответственно показаны схематичный вид сбоку и вид сверху первого типичного воплощения цепи;
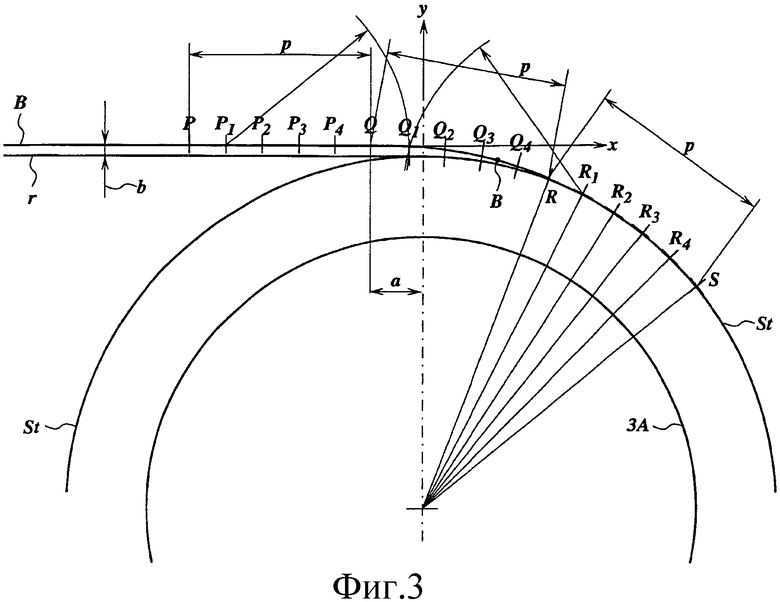
на Фиг.3 схематично изображена криволинейная траектория звена, которая изменяется от прямолинейного движения до вращательного движения;
на Фиг.4А-Е схематично изображено в виде последовательных шагов взаимодействие звеньев цепи со стационарными и вращающимися опорными средствами;
на Фиг.5 показано второе воплощение звеньев цепи;
на каждой из Фиг.6-11 показаны дальнейшие воплощения цепных передач, в которых цепь взаимодействует со звездочкой, снабженной зубьями; и
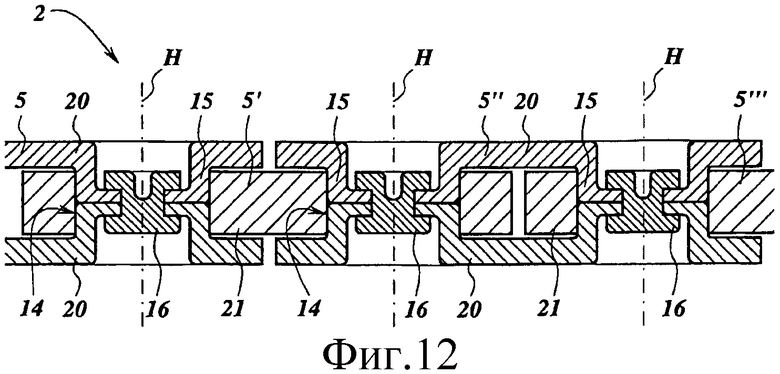
на Фиг.12 показано простое воплощение цепи.
Следует отметить, что чертежи являются исключительно схематичными иллюстрациями предпочтительных воплощений изобретения, которые даются исключительно в качестве не ограничивающих примеров. Одинаковые или аналогичные элементы обозначены на чертежах одинаковыми ссылочными позициями.
Обращаясь, во-первых, к Фиг.1А: этот чертеж иллюстрирует цепную передачу 1 с бесконечной цепью 2, которая вращается вокруг двух звездочек 3А и 3В. Звездочки 3А и 3В смонтированы с возможностью вращения и снабжены расположенными по их окружностям зубьями, которые во время эксплуатации поочередно взаимодействуют по участку зацепления со звеньями 5 цепи 2. Участок зацепления вокруг звездочки 3А полностью обозначен буквой А на Фиг.1. В этом случае звездочка 3А является ведущей звездочкой, в то время как звездочка 3В является ведомой звездочкой. Передаточное отношение между звездочками 3А и 3В не зависит от углового положения звездочек 3. В этом типичном воплощении было выбрано передаточное отношение 1, но, обращаясь к Фиг.1В, ясно, что также можно выбрать отношение, отличное от 1. Верхняя часть 2А цепи находится под действием растягивающего усилия, в то время как номинально ненагруженную нижнюю часть 2В натягивают с помощью устройства 4 для натяжения цепи.
Обращаясь теперь к Фиг.2А, 2В, цепь 2 составлена из ряда чередующихся звеньев 5, 5′, 5′′, каждое из которых с возможностью вращения соединено с другим с помощью осей 6. Звенья 5 цепи 2 в данном типичном воплощении в каждом случае содержат две накладки 7, продолжающиеся в продольном направлении цепи. Каждая накладка 7 звеньев снабжена двумя поворотными отверстиями 8, которые расположены на расстоянии друг от друга в продольном направлении накладки 7, имеют центровую ось Н, и в каждом размещены последовательно расположенные оси 6 цепи 2. Расстояние между центровыми осями Н поворотных отверстий 8 и двумя осями 6 звена 5, которые образуют шарнир для чередующихся звеньев 5, чтобы они перемещались в отношении друг друга, равно шагу р цепи 2. Каждая накладка 7 звена снабжена, вблизи одной из длинных сторон L, двумя опорными поверхностями n, каждая из которых расположена вблизи одного края накладки 7 звена. Цепь 2 составлена из внутренних звеньев 5А, накладки 7 которых соединены с центровой осью Н с помощью полой втулки 9, и наружных звеньев 5В, накладки 7 которых перекрывают накладки 7 внутренних звеньев 5А и соединены посредством осей 6 поворота. Следует отметить, что в данном контексте звено 5 в каждом случае образовано, по меньшей мере, одной накладкой 7, и во втулочной цепи, показанной в этом примере, каждое из внутренних звеньев 5А содержит две накладки 7 и две втулки 9, в то время как каждое из наружных звеньев 5В содержит две накладки 7 и две оси 6.
Цепная передача 1 также содержит направляющую 10А или 10В, которая установлена вблизи звездочки 3А и/или 3В (сравните с Фиг.1) для направления звеньев 5 цепи 2 через взаимодействие с опорными поверхностями n накладок 7 звеньев вблизи и вдоль, по меньшей мере, части участка зацепления А.
Обращаясь к Фиг.3, чертеж иллюстрирует криволинейную траекторию В, по которой следует центровая ось Н, в частности, под влиянием направляющих 10А и 10В. Чтобы нейтрализовать эффект многоугольника, криволинейная траектория В в зоне между звездочками 3А и 3В имеет прямолинейный участок, на котором показаны точки Р, Р1-Р4 и Q, дуговой участок St, на котором показаны точки R, R1-R4 и S, и между ними центральный участок с изгибом, который является касательным как к прямолинейному участку, так и к дуговому участку и на котором показаны точки Q, Q1-Q4 и R. Дуговой участок St соответствует окружности, которую описывают две центровые оси Н звена 5, когда звено 5 полностью опирается на звездочку 3А. На Фиг.3 показана система координат х-у. Ось х выбрана таким образом, что она совпадает с прямолинейным участком криволинейной траектории В. Следует отметить, что ось х лежит на расстоянии b за пределами прямолинейной части контура, который описан двумя начальными окружностями зубьев двух взаимодействующих звездочек 3А и 3В и двумя соединительными линиями r, которые являются касательными к этим двум начальным окружностям. Ось у, которая перпендикулярна к оси х, выбрана таким образом, что она проходит через центр начальной окружности St зубьев звездочки 3А. Выбор положения точки Q определяет форму центрального участка криволинейной траектории В. Точка Q лежит на оси х и находится на расстоянии а от оси у и на расстоянии b от соединительной линии r. Если а и b выбраны подходящим образом, результатом является кривая, которая является касательной с непрерывно меняющимся радиусом кривизны как к прямолинейной части криволинейной траектории В, так и к дуговой части криволинейной траектории В. Если уместно, b может быть выбрано равным 0 или отрицательным.
Форма центрального участка криволинейной траектории В определяет наличие или отсутствие эффекта многоугольника. Для расчета криволинейной траектории В таким образом, чтобы не возникал эффект многоугольника, началом отсчета является положение точки Q. Точка R лежит на начальной окружности St на расстоянии шага р от точки Q, а точка S лежит на начальной окружности St на расстоянии шага р от точки R. Промежуток между P и Q аналогичен величине шага р. Прямая линия Р-Q разделена точками P1-P4 на равные части, в показанном примере - на 5 частей, а дуга R-S разделена на такое же количество равных частей точками R1-R4. Точки Q1-Q4, которые лежат на центральном участке криволинейной траектории В, находятся на расстоянии шага р от соответствующих точек Р1-Р4 и R1-R4 и теперь могут быть построены. Вся криволинейная траектория В может быть построена подобным образом.
Следует отметить, что криволинейная траектория В, проиллюстрированная на Фиг.3, частично образована стационарной направляющей 10А, установленной вблизи звездочки 3А для направления звеньев 5 цепи 2 к входной части участка зацепления А и по ней. Основываясь на Фиг.1, должно быть ясно, что с помощью стационарной направляющей 10А, установленной вблизи звездочки 3А, звенья 5 также можно направить по выходной части участка зацепления А и дальше от участка зацепления. Оставшаяся часть криволинейной траектории В образована звеньями 5, опирающимися на направляющую 10В, которая вращается вместе со звездочкой 3А, как показано ниже.
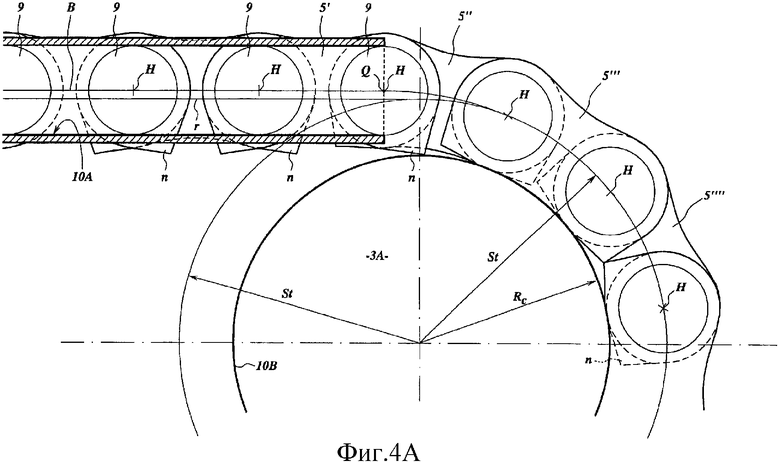
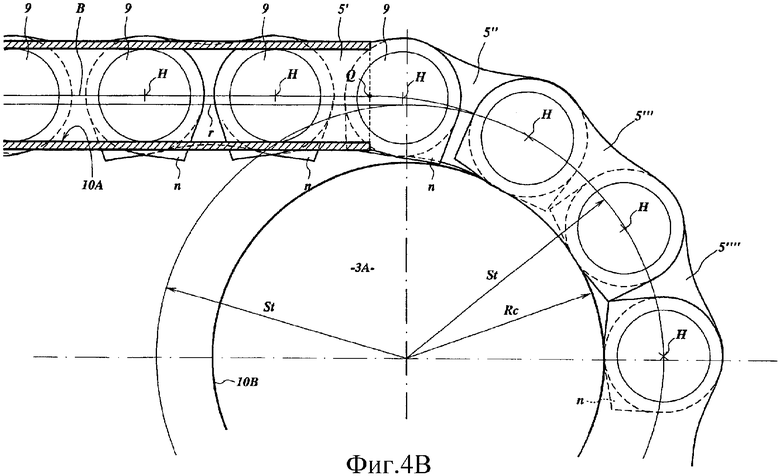
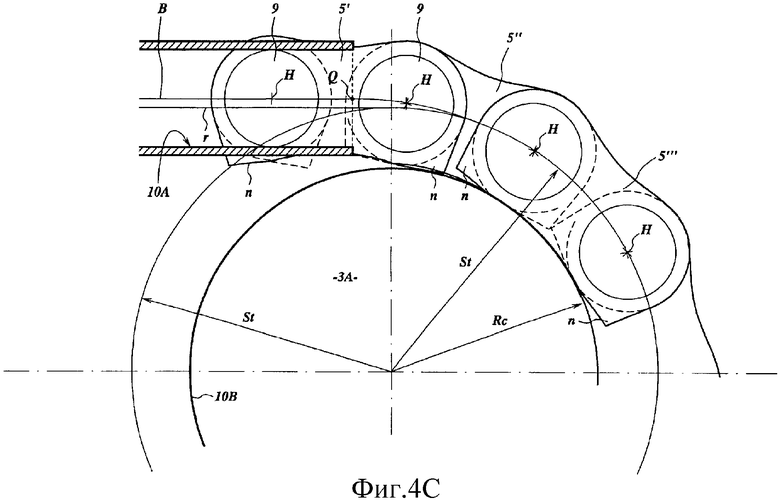
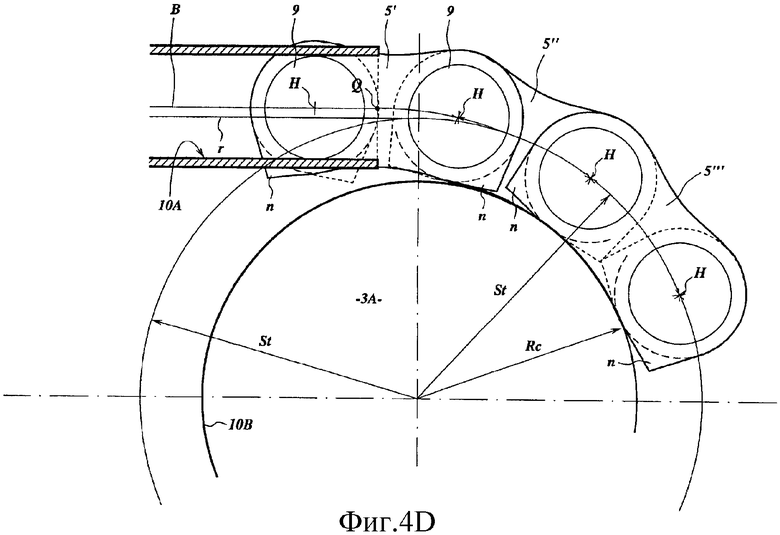
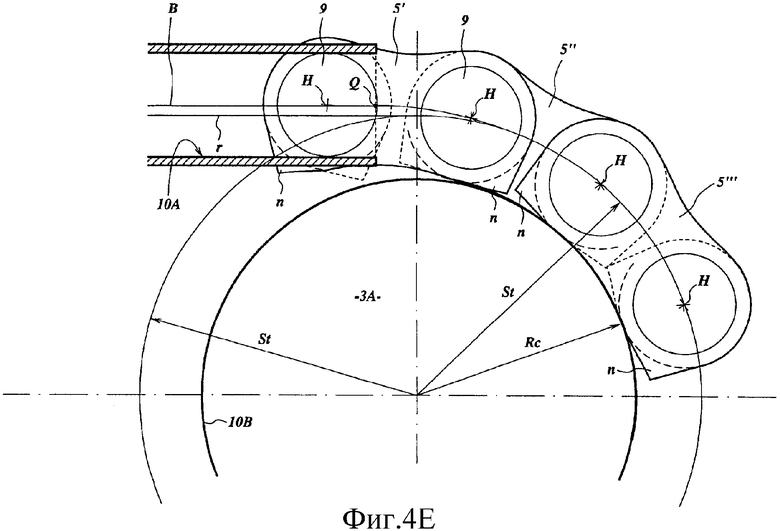
Обращаясь теперь к Фиг.4А-4Е, на данных чертежах представлена подробная иллюстрация направляющей согласно изобретению, показывающая, как звенья 5 направляют, по меньшей мере, к части участка зацепления А и по ней таким образом, что центровые оси Н следуют по криволинейной траектории В. На последующих чертежах схематично изображено положение, в котором звено 5 перемещается слева направо и непрерывно все в большей степени входит в зацепление со звездочкой 3А. Зубья звездочки 3А не показаны из соображений ясности. Направляющая 10 содержит неподвижную первую часть 10А и вращающуюся вторую часть 10В. Между неподвижной первой частью 10А и вращающейся второй частью 10В есть переход. Каждое из звеньев 5 содержит, по меньшей мере, две направляющие поверхности, которые, чтобы «построить мост» через этот переход, на короткое время одновременно опираются на различные направляющие 10А и 10В. Первая направляющая поверхность каждого из звеньев в этом типичном воплощении образована передней втулкой 9, в то время как вторая направляющая поверхность образована передней опорной поверхностью n на нижней части звена 5, которая удлинена по краям нижней части. Первая стационарная часть 10А направляющей 10 сконструирована как прямолинейная направляющая и взаимодействует с втулкой 9. Вторая часть 10В направляющей в данном типичном воплощении сконструирована как вращающаяся цилиндрическая направляющая поверхность, которая установлена вблизи зубьев звездочки 3А и имеет радиус Rс, который меньше, чем радиус дуги St окружности. Вторая часть направляющей 10В взаимодействует с опорной поверхностью n. На чертежах, аналогично Фиг.3, показана траектория, которую проходят центровые оси Н осей, когда их направляют к части участка А зацепления и по ней.
На Фиг.4А показано, как передняя втулка 9 звена 5′, центровая ось Н которого находится в положении Q криволинейной траектории В, опирается на стационарную направляющую 10А, а также как передняя опорная поверхность n опирается на вращающуюся направляющую 10В. Когда звено 5′ перемещается дальше вправо, стационарная направляющая 10А уже не поддерживает его спереди. Однако, так как звено 5′ продолжает опираться опорной поверхностью n на вращающуюся направляющую 10В, передняя центровая ось Н звена 5′ продолжает следовать по криволинейной траектории В. На Фиг.4В-4Е показано, как во время дальнейшего смещения звена 5′ передняя опорная поверхность n звена 5′ продолжает опираться на вращающуюся направляющую 10В. В этом случае передняя центровая ось Н перемещается еще дальше к центру звездочки 3А, пока звено 5′ не будет опираться на нее в полном контакте, и обе центровые оси Н звена 5′ не будут перемещаться по дуге St окружности. В таком случае звено 5′ вращается только вокруг центра звездочки 3А. Ясно, что форма опорной поверхности n является решающим фактором в определении траектории центровых осей Н, и, наоборот, что форма опорной поверхности n определяется криволинейной траекторией В и радиусом Rc цилиндрической вращающейся направляющей 10В. Размеры опорной поверхности n определяются максимальной допустимой длиной звена 5. Максимальная длина звена 5 зависит от минимального числа зубьев звездочки 3А, с которой цепь 2 должна быть в состоянии взаимодействовать. Если число зубьев меньше, угол, на который звенья 5 должны быть в состоянии поворачиваться в отношении друг друга вокруг осей Н поворота, больше, так что звенья должны быть короче, чтобы предотвратить столкновение чередующихся звеньев 5 друг с другом.
Теоретически криволинейная траектория В зависит от радиуса дуги St окружности и поэтому также зависит от числа зубьев на звездочке. Это означает, что форма опорной поверхности n также зависит от числа зубьев на звездочке, и что эффект многоугольника можно полностью устранить, только если цепь применяется для звездочек с таким же числом зубьев. На практике было обнаружено, что эффект многоугольника особенно проявляется со звездочками с меньшим числом зубьев, и что для звездочек с бульшим числом зубьев форма опорной поверхности n почти не отличается. В результате конструирования опорных поверхностей n цепи 2 для наименьших возможных звездочек можно гарантировать, что со звездочками больших размеров эффект многоугольника возникать не будет. Если желательно, прямолинейную направляющую 10А можно даже исключить.
Следует отметить, что существуют условия, в которых требуется, чтобы в цепях 2 шаг р внутреннего звена 5А отличался от шага р наружного звена 5В. Специалисту в данной области техники ясно, что в таком случае чередующиеся центровые оси Н шарниров должны проходить по двум различным криволинейным траекториям В. Это достигается конструированием в этих случаях опорных поверхностей n внутренних звеньев 5А и наружных звеньев 5В по-разному. На практике в большинстве случаев было обнаружено, что для ограниченного различия в шаге р внутреннего звена 5А и наружного звена 5В различием в опорных поверхностях n можно пренебречь.
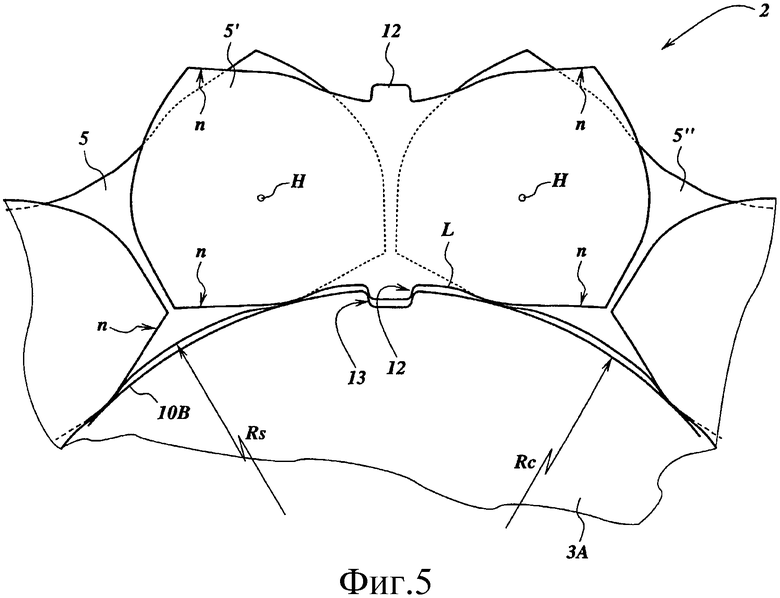
На Фиг.5 показана цепь 2, которая опирается на вращающуюся направляющую 10В и имеет звенья 5, 5′ и 5′′. Звенья 5 могут опираться на вращающуюся направляющую 10В с помощью опорных поверхностей n, в то время как между опорными поверхностями n длинная сторона L звена 5 имеет радиус Rs, который меньше радиуса Rc опорного цилиндра, так что звено 5 в этом месте не опирается на вращающуюся направляющую 10В, и гарантировано, что края звена 5 опираются на вращающуюся направляющую 10В посредством опорных поверхностей n. В центре длинной стороны L звено 5 снабжено выступом 12, который может входить в зацепление с канавкой 13 во вращающейся направляющей 10В. Это соединение выступ-канавка передает усилие между цепью 2 и звездочкой 3А. Для правильной работы необходимо, чтобы канавка присутствовала только в области размещения выступа 12 накладки внутреннего звена 5А или накладки наружного звена 5В, с тем, чтобы опорные поверхности n предыдущего и последующего звеньев 5, находящиеся вблизи выступа 12, могли опираться на вращающуюся направляющую 10В и не проваливались в канавку 13. Предпочтительно, чтобы звездочка 3А была составлена из дисков с толщиной, которая соответствует толщине накладок внутреннего звена 5А и/или наружного звена 5В, которые обрабатывают отдельно. Ясно, что выступы также могут быть расположены на вращающейся направляющей 10В, в то время как звено 5 при этом может иметь канавку, которая взаимодействует с выступом. В таком случае необходимо обеспечить, чтобы опорная поверхность n всегда оставалась на расстоянии от выступов. На Фиг.5 также показано, что звенья 5 являются симметричными, так что звездочка может проходить по обеим сторонам цепи 2. Это означает, что имеются четыре направляющие поверхности n. Этот вариант можно использовать для передач с множеством валов, вокруг которых нужно направлять цепь 2. Это также дает возможность переворачивать цепь 2 с целью получить дополнительный срок службы, когда она износилась.
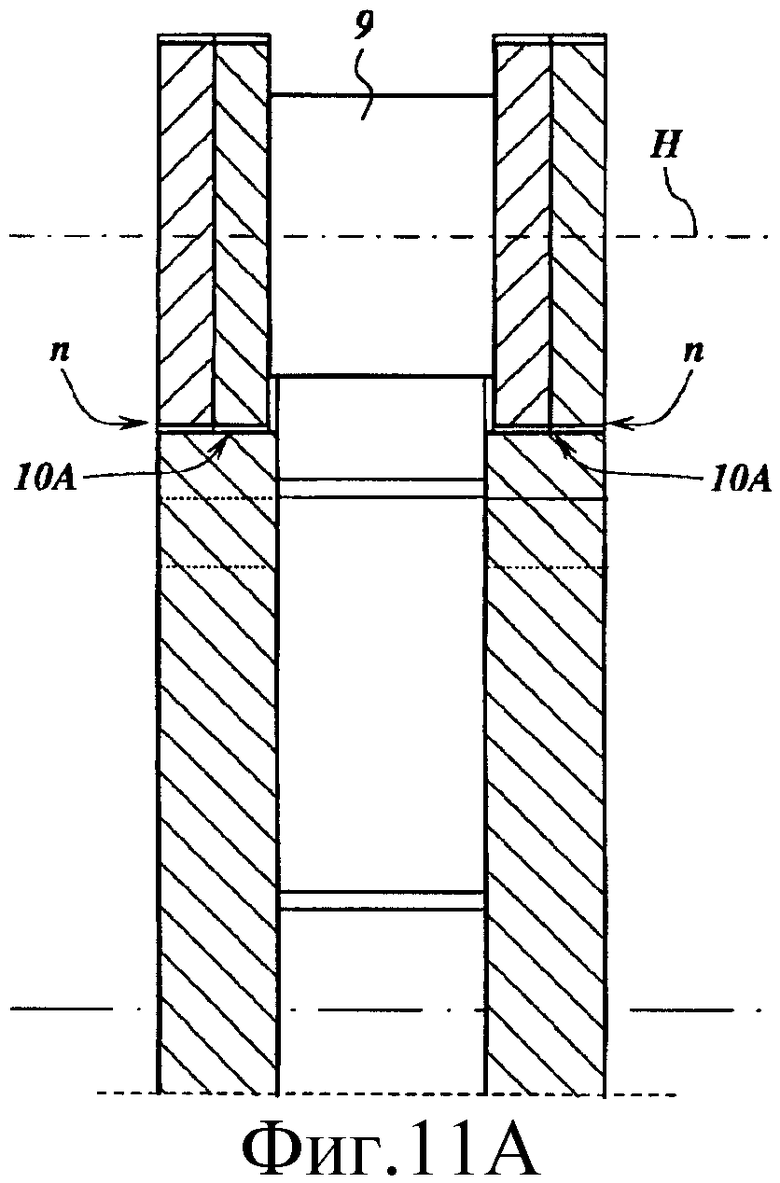
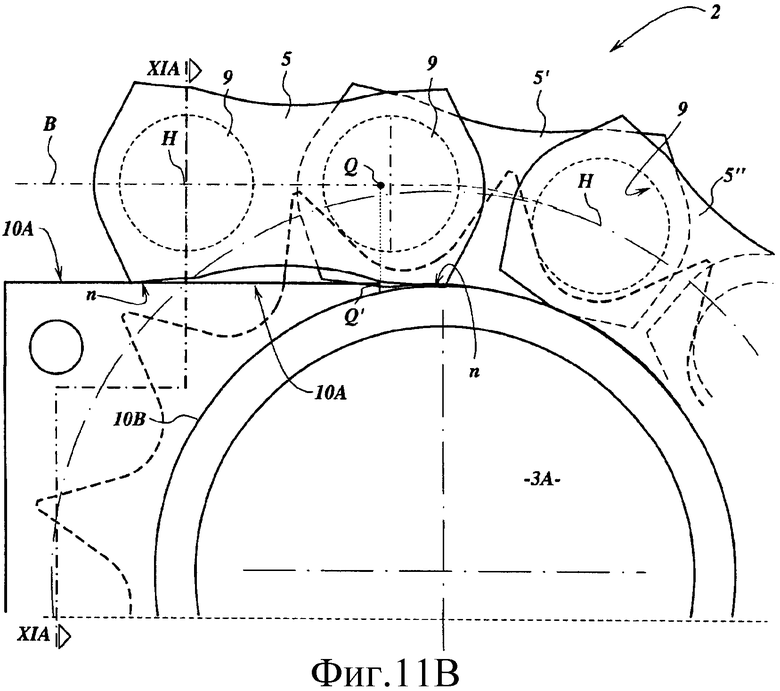
Существуют многочисленные способы, которыми может быть сконструирована неподвижно установленная первая стационарная часть 10А направляющей. На Фиг.6-11 схематично изображено несколько примеров. В показанных примерах стационарная часть 10А направляющей является прямолинейным участком, причем расстояние b всегда очень короткое, в результате чего криволинейная траектория В более или менее совпадает с соединительной линией r, которая является касательной к дуге St окружности. Также существует множество других возможных вариантов.
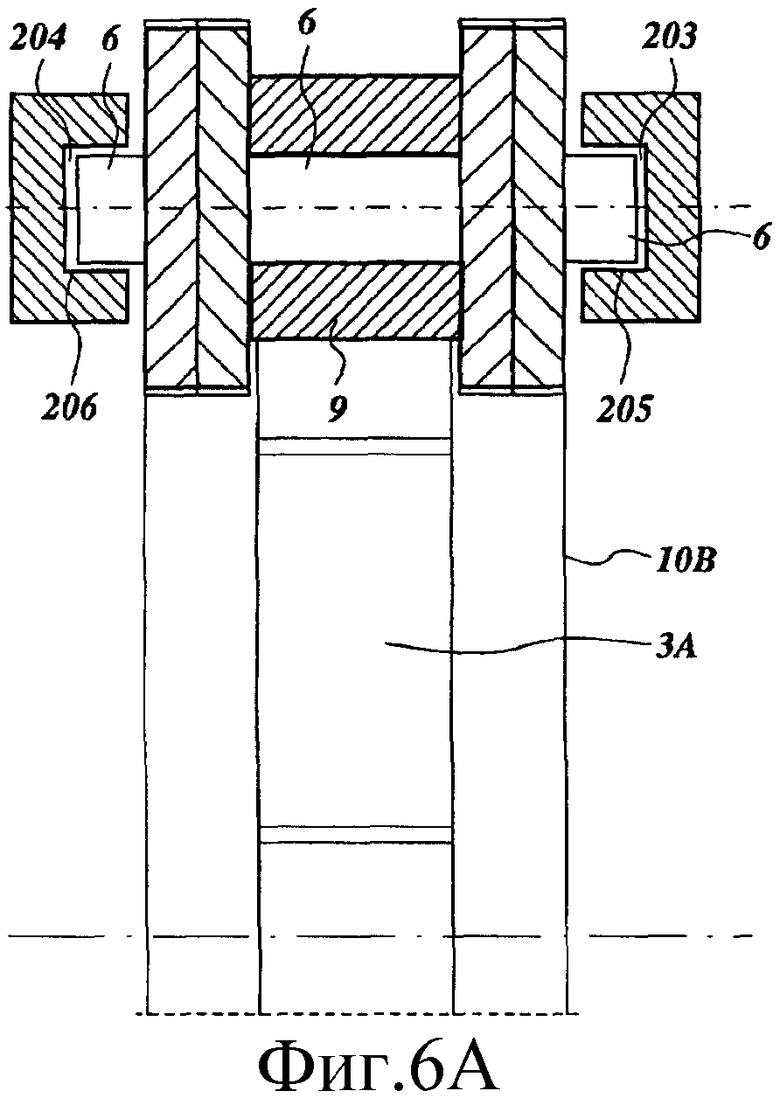
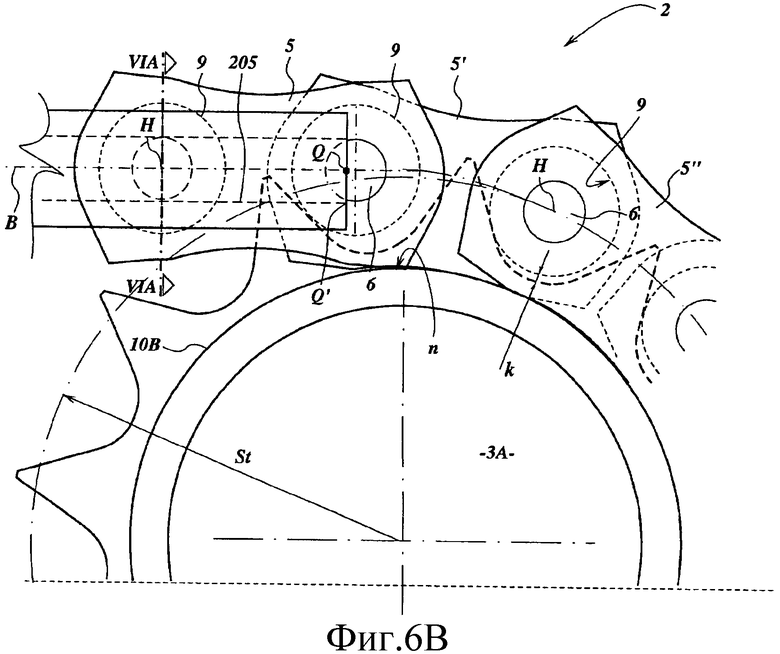
Обращаясь теперь к Фиг.6А и 6В, на данных чертежах изображены соответственно схематичное сечение VIA-VIA по Фиг.6В и схематичный вид сбоку альтернативного воплощения неподвижно установленной первой, стационарной части 10А направляющей цепной передачи 1, причем оси 6 цепи имеют удлиненную конструкцию таким образом, что накладки звеньев цепи 2 перекрыты. С одной или обеих сторон цепи цепь 2 направляют с помощью выемки 203 и/или 204 в корпусе, образующем неподвижно установленную первую часть направляющей. На чертеже выемка 203/204 с двух сторон окружает ось 6 посредством контуров 205 и 206. В зависимости от конструкции цепной передачи 1 контур 205 или 206 можно исключить. Выемка 203/204 продолжается до точки Q таким образом, что, когда ось 6 покидает выемку 203/204, опорная поверхность n опирается на вращающуюся направляющую 10В. Как уже было заявлено, траектория центровых осей Н осей поворота цепи 2 определяется только стационарной направляющей 10А и вращающейся направляющей 10В. Зубчатый венец звездочки 3А не содействует данной направляющей. Это отчетливо показано на Фиг.6В, на которой во время взаимодействия между цепью 2 и звездочкой 3А втулка 9 опирается не на впадину зубчатого венца, а скорее на опорную поверхность n, опирающуюся на вращающуюся направляющую 10В. Чтобы передать усилие, втулка 9 опирается на боковую поверхность зуба, и между втулкой 9 и впадиной зубчатого венца имеется промежуток k.
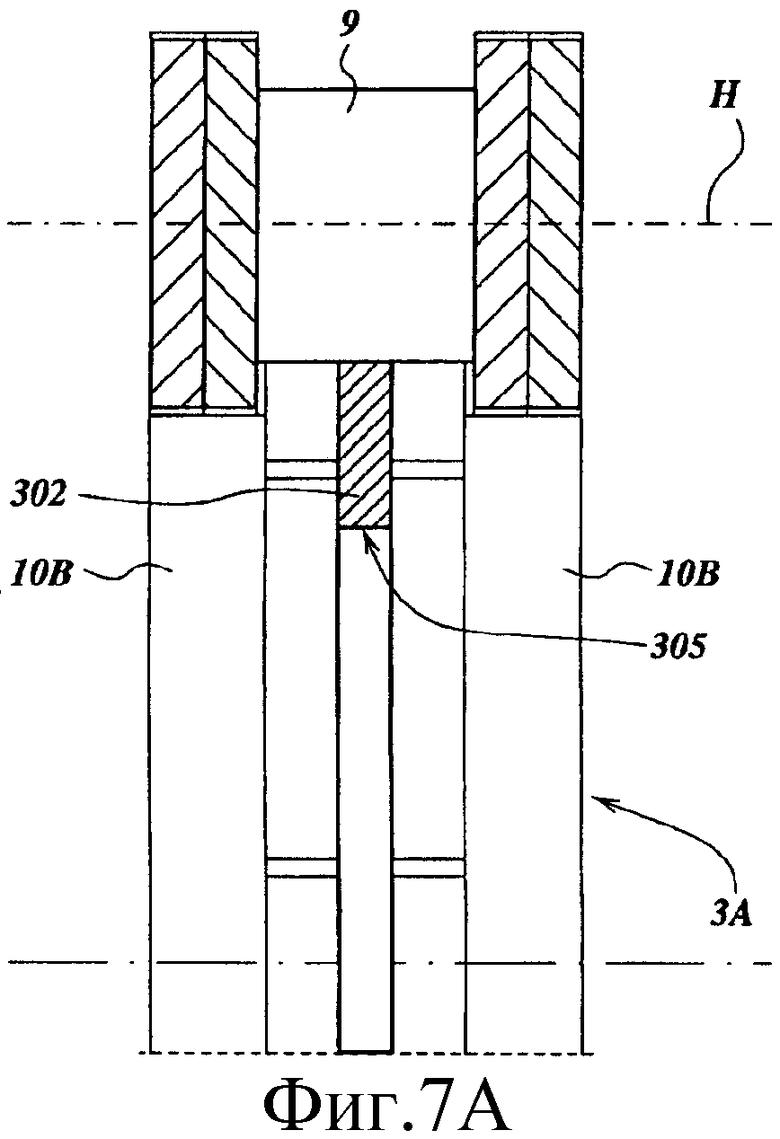
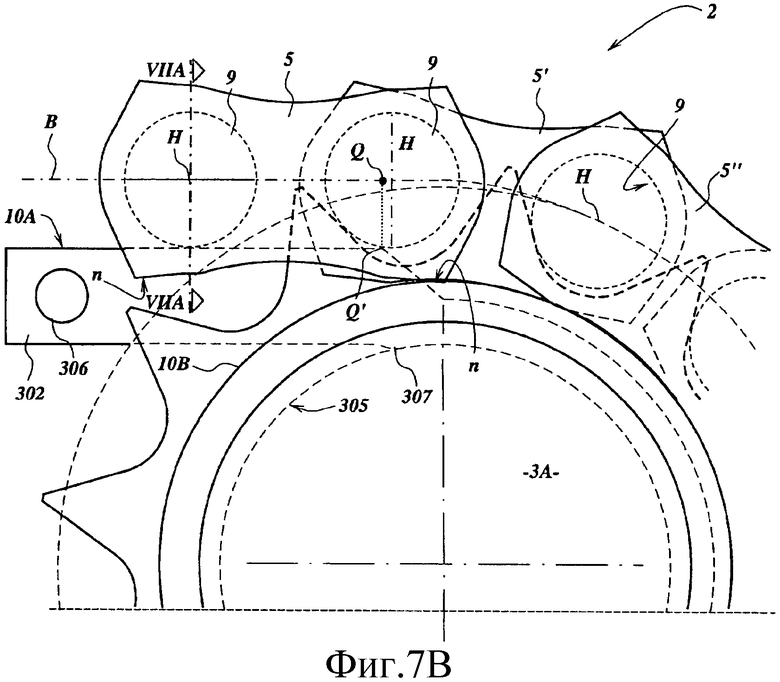
На Фиг.7А и 7В соответственно показаны сечение VIIA-VIIA по Фиг.7В и вид сбоку типичного воплощения, в котором втулка 9 втулочной цепи 2, имеющая звенья 5, 5′ и 5′′, опирается на стационарную направляющую 10А. В звездочке 3А имеется круговая канавка 305, в каковой канавке расположена первая часть направляющей, сконструированная как прямолинейная направляющая 302. Втулка 9 цепи 2 в этом случае опирается на прямолинейную направляющую 302. Для успешной и правильной сборки прямолинейная направляющая имеет конструкцию U-образной формы, так что она опирается, с точки зрения ее положения, на круговую канавку 305. Прямолинейная направляющая 302 может быть смонтирована в неподвижном положении посредством болта 306. Если желательно, прямолинейная направляющая 302 может быть упруго прикреплена к канавке 305 звездочки 3А посредством выступа 307, не допускающего отсоединения прямолинейной направляющей 302. В таком случае нет необходимости в болте 306. Очевидно, что в данном решении необходимо обеспечить, чтобы между прямолинейной направляющей 302 и звездочкой 3А было достаточно смазки.
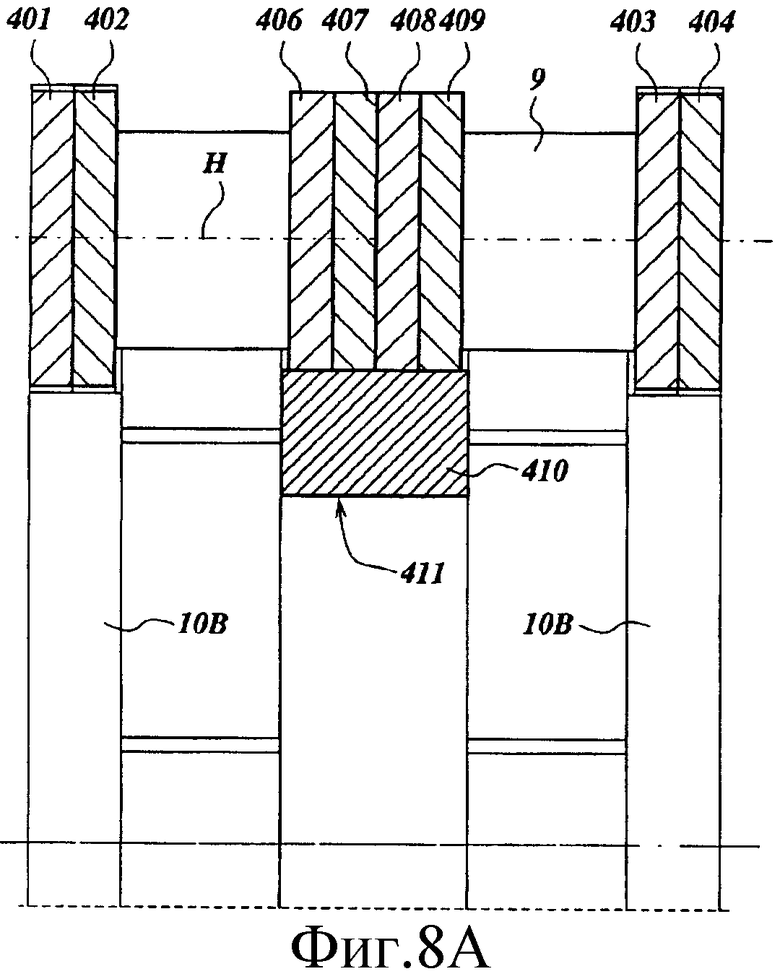
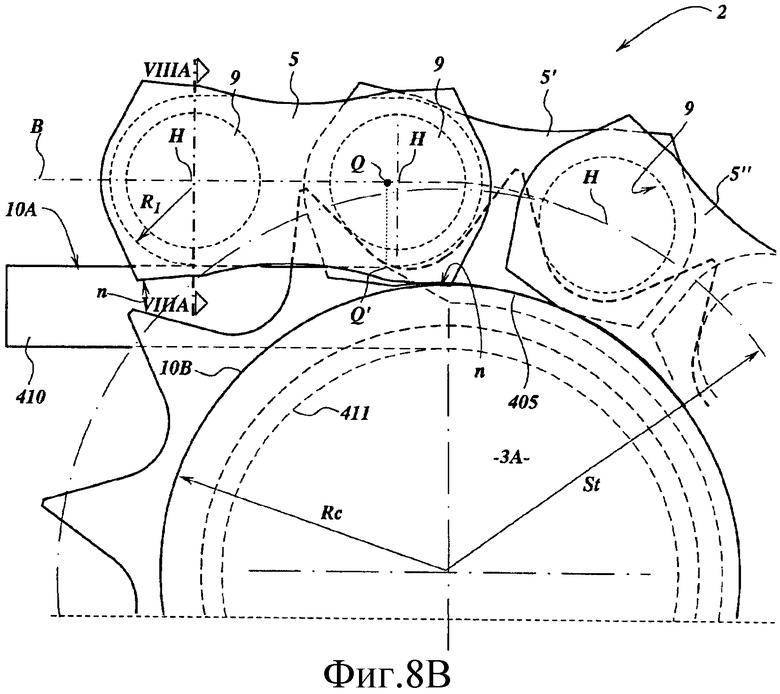
На Фиг.8А и 8В соответственно показаны сечение VIIIA-VIIIA по Фиг.8В и вид сбоку примера воплощения, в котором цепь 2 сконструирована как двухрядная цепь. Это позволяет значительно повысить прочность цепи. Наружные накладки звеньев 5, которые обозначены ссылочными позициями 401, 402, 403 и 404, на длинных сторонах вблизи углов снабжены направляющими поверхностями n, так что звенья 5 могут опираться на вращающуюся направляющую 10В. Внутренние накладки звеньев 5, которые обозначены ссылочными позициями 406, 407, 408 и 409, конструируют предпочтительно без направляющих поверхностей n, и они имеют контурную окружность с радиусом R1, который соответствует разности между радиусом начальной окружности St и радиусом Rc опорного цилиндра. Контурные окружности этих звеньев направляют с помощью прямолинейной направляющей 410, которая, в качестве примера, имеет конструкцию U-образной формы и точно расположена у круговой канавки 411, выполненной в звездочке. Прямолинейная направляющая находится в действии до точки Q′.
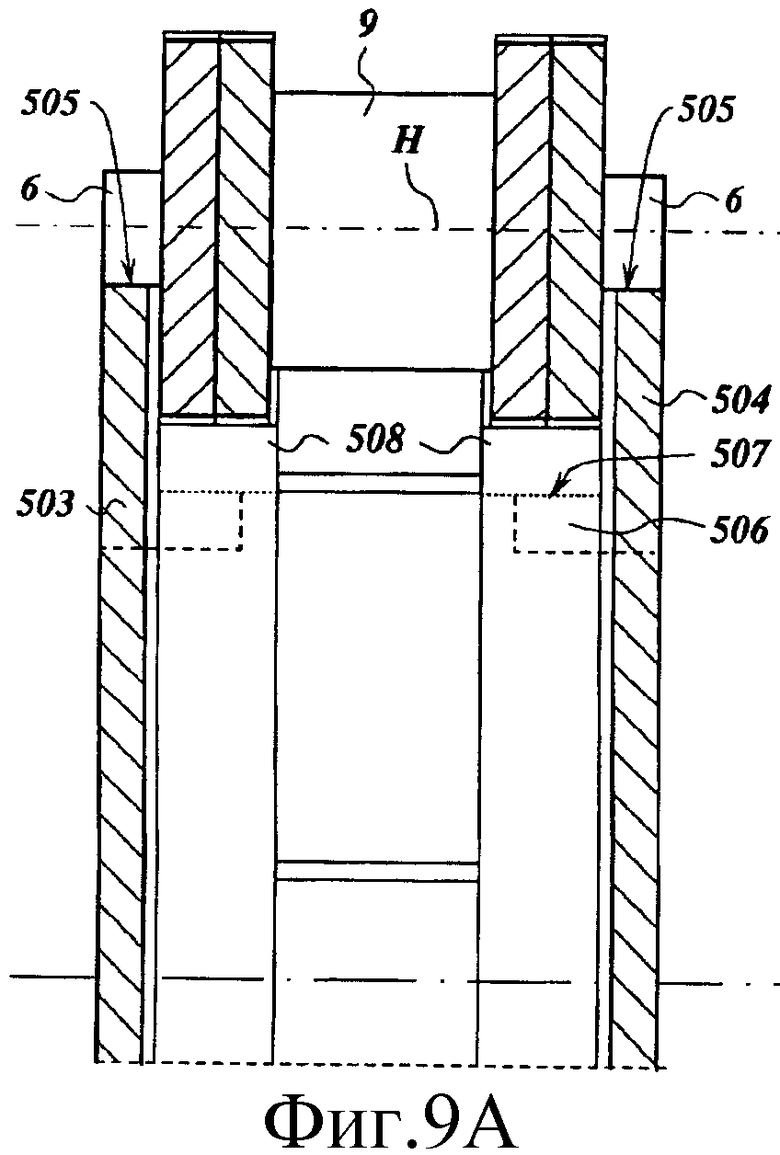
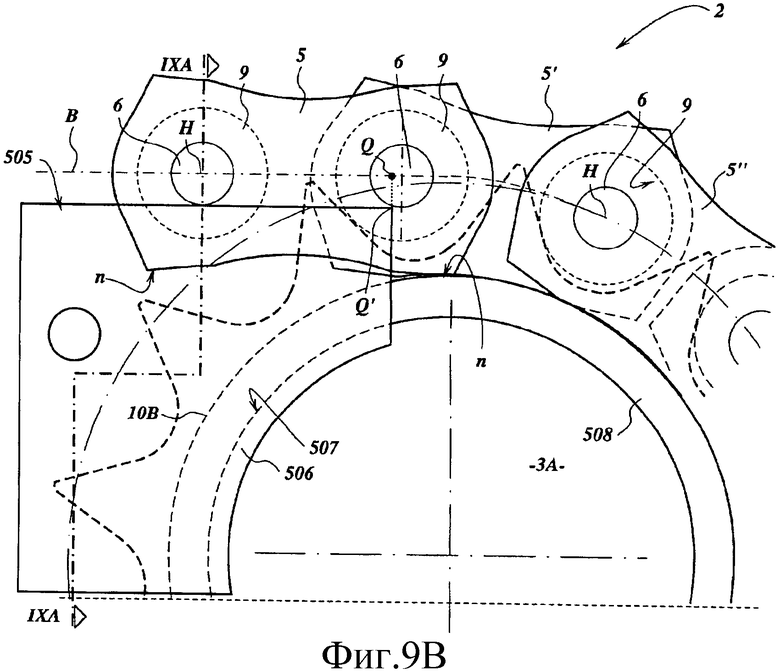
На Фиг.9А и 9В соответственно показаны поперечное сечение IXA-IXA по Фиг.9В и вид сбоку примера воплощения, в котором цепь 2 направляется посредством удлиненной оси 6, которая скользит по контуру 505 или неподвижно установленной первой части направляющей, которая сконструирована как прямолинейная направляющая 503 или 504. Прямолинейная направляющая заканчивается в точке Q′. Прямолинейная направляющая 503 или 504 сконструирована как плита, которая прикреплена к корпусу посредством болта. В данном случае для точного позиционирования плиты по отношению к звездочке была выбрана кольцевая опора 506, которую направляют внутренней стороной 507 кольца 508 цилиндрической вращающейся направляющей 10В.
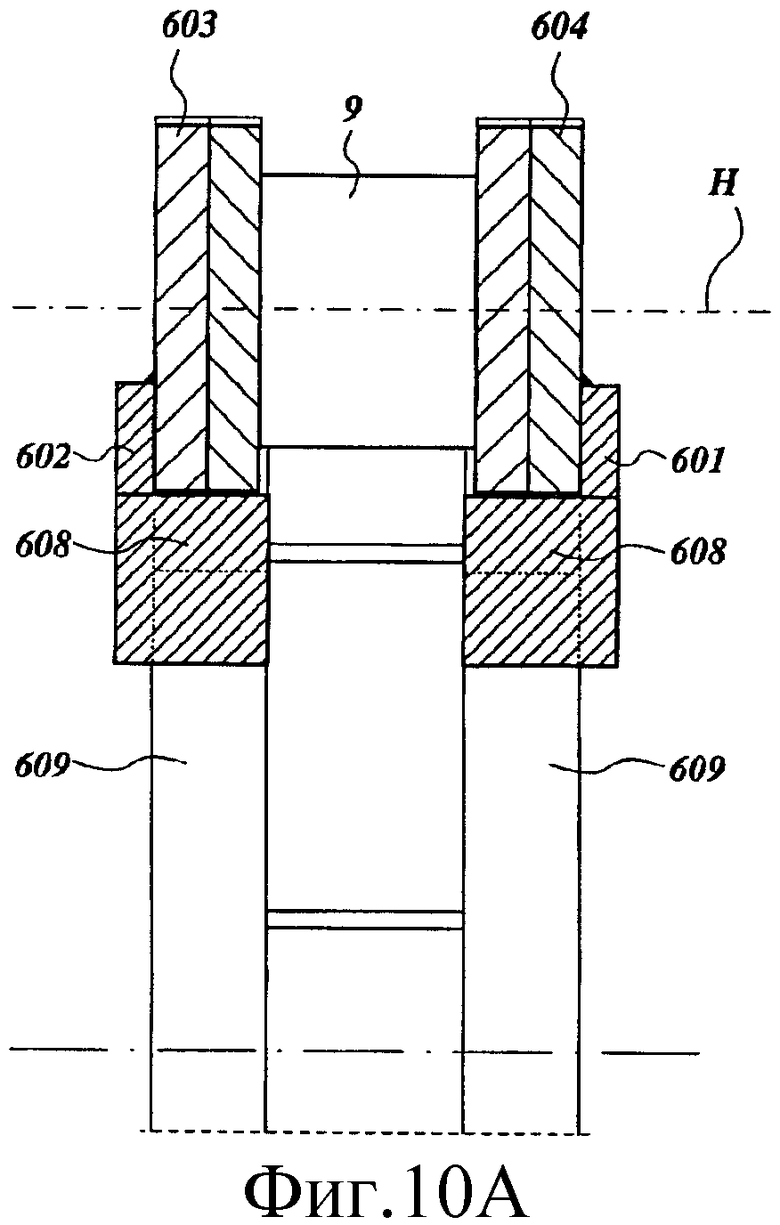
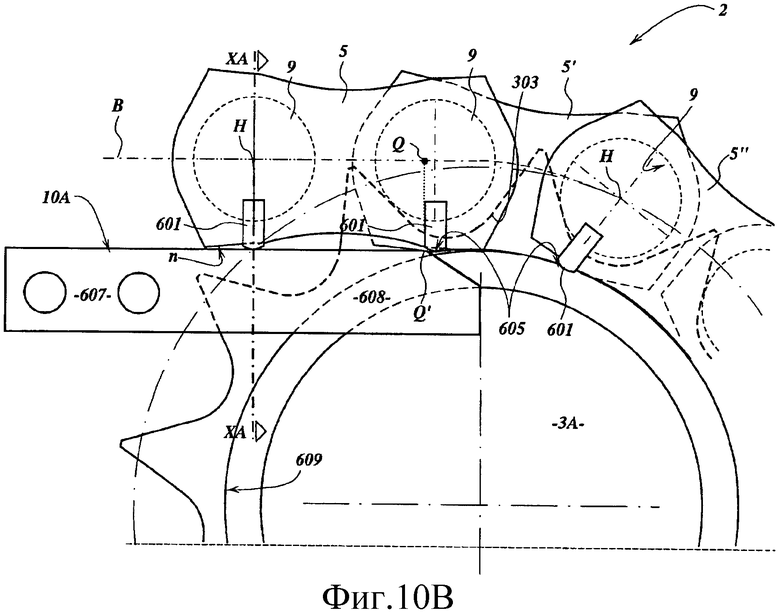
На Фиг.10А и 10В прямолинейная направляющая 10А реализована посредством планок 601 и 602, которые неподвижно прикреплены к наружным накладкам 603 и 604 звеньев. С нижней стороны планки снабжены дуговым закругленным участком 605 с центровой осью Н в его центре. Планки скользят по контуру прямолинейной направляющей 607, который образует стационарную направляющую 10А и находится в действии до точки Q′. Прямолинейная направляющая может быть закреплена посредством болтов. В данном примере прямолинейная направляющая снабжена канавкой 608, в которой вращается направляющая окружность 609.
На Фиг.11 показан вид сбоку, иллюстрирующий, что неподвижно установленная первая часть стационарной направляющей 10А и установленная с возможностью вращения вторая часть 10В направляющей 10 непосредственно примыкают друг к другу, причем стационарная прямолинейная направляющая 10А заканчивается под точкой Q. Это воплощение обладает значительным преимуществом в том, что оно имеет компактную конструкцию в осевом направлении. Следует отметить, что неподвижно установленная первая часть 10А и установленная с возможностью вращения вторая часть 10В направляющей 10 могут также примыкать друг к другу под углом или даже могут быть расположены на определенном расстоянии друг от друга в направлении рабочего движения цепи и/или перпендикулярно по отношению к нему.
На Фиг.12 показано схематичное сечение цепи без осей согласно изобретению. Цепь 2 составлена из звеньев 5, 5′, 5′′ и т.д., поочередно содержащих наружные звенья 20 и внутренние звенья 21. Два отверстия 14 с центровыми осями Н расположены во внутренних звеньях 21. Наружные звенья 20 изготовлены из листового материала с толщиной, которая составляет примерно половину толщины внутренних звеньев 21. Бесстружечная деформация применялась для образования цилиндрических цапф 15 с центровыми осями Н, причем цапфы 15 точно входят в отверстия 14. Цапфы 15 установлены в отверстиях 14 с каждой стороны, и наружные звенья 20 прикреплены друг к другу в этом случае заклепками 16. Простая цепь 2 этого типа особенно подходит при применении звездочек без зубьев, например, когда вращение звездочек связано с цепью посредством выступов и канавок, как описано на Фиг.5.
В дополнение к применению цепи согласно изобретению, показанному выше в цепной передаче, как показано на Фиг.1, цепную передачу согласно изобретению также можно применять, когда цепь направляют вокруг звездочки с малым диаметром, в этом случае звездочку используют только для передачи силы, а не для передачи момента. Одним из применений является перемещение посредством гидроцилиндра вилки автопогрузчика с вильчатым захватом, в этом случае звездочка прикреплена к поршневому штоку. Цепь образует дугу в 180° вокруг звездочки, и один конец прикреплен к подъемной мачте, а другой конец - к вилке, которую нужно перемещать. Предпочтительно, чтобы цепь, которая снабжена опорными поверхностями согласно изобретению, вблизи звездочки скользила по стационарной направляющей посредством боковой стороны накладок звеньев. В этом устройстве во время перемещения поршневого штока вилка перемещается без ударов, даже если звездочка имеет малый диаметр по сравнению с шагом р, что желательно, принимая во внимание имеющееся в распоряжении пространство.
Следует отметить, что изобретение не ограничено описанными здесь предпочтительными примерами воплощения. Например, вращающаяся направляющая может иметь форму, отличную от круговой. Также возможно снабдить установленную с возможностью вращения вторую часть выступами, выемками или повторяющимися дугами. В воплощении этого типа накладки звеньев цепи могут, если желательно, иметь обычную восьмигранную или овальную периферию.
Варианты этого типа понятны специалисту в данной области техники и считаются попадающими под объем изобретения, как представлено в следующей далее формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕПЬ ДЛЯ ЦЕПНОЙ ПЕРЕДАЧИ | 2006 |
|
RU2439395C2 |
| Цепная передача | 1990 |
|
SU1728556A1 |
| ПРИВОДНОЙ И/ИЛИ ОГИБНОЙ ЭЛЕМЕНТ ДЛЯ ЦЕПИ ТРАНСПОРТЕРА ДЛЯ ПЕРЕВОЗКИ ЛЮДЕЙ И ЦЕПНАЯ СИСТЕМА | 2007 |
|
RU2437824C2 |
| ПРИВОД СТИРАЮЩЕГО ЦИЛИНДРА ДЛЯ МАШИНЫ МЕТАЛЛОГРАФИЧЕСКОЙ ПЕЧАТИ (ВАРИАНТЫ) | 1998 |
|
RU2211150C2 |
| ПРИЕМНЫЕ ЭЛЕКТРОДЫ ЕМКОСТНОЙ СИСТЕМЫ БЕСПРОВОДНОГО ПИТАНИЯ | 2012 |
|
RU2606389C2 |
| ЦЕПЬ И ЕЕ ЗВЕНО | 1994 |
|
RU2036347C1 |
| МАШИНА ДЛЯ БЕСШВЕЙНОГО СКРЕПЛЕНИЯ КНИЖНЫХ БЛОКОВ | 1993 |
|
RU2023595C1 |
| ЦЕПЬ ПРОТИВОСКОЛЬЖЕНИЯ С НАПРАВЛЯЮЩИМИ ЦЕПЯМИ, ОБЛАДАЮЩИМИ БОКОВОЙ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2599736C2 |
| ЦЕПНОЕ КОЛЕСО ДЛЯ ЦЕПНЫХ ПРИВОДОВ | 2008 |
|
RU2418215C1 |
| ЦЕПЬ ИЗ ЗВЕНЬЕВ ОБРАЗОВАННЫХ ИЗ МЕТАЛЛА СОРТОВОГО ИЛИ ФАСОННОГО ПРОФИЛЯ | 1929 |
|
SU17942A1 |
Изобретение относится к машиностроению, в частности к цепным передачам. Цепная передача содержит цепь (2), которая составлена из ряда последовательных звеньев (5), каждое из которых соединено с другим таким образом, что они могут поворачиваться вокруг оси (Н) поворота, и звездочку (3А), которая может вращаться вокруг оси вращения и имеет приводные средства, которые взаимодействуют со звеньями цепи во время эксплуатации. Цепная передача также содержит опорные средства (10А, 10В) для направления звеньев цепи таким образом, что ось поворота на определенном расстоянии от звездочки всегда имеет постоянную скорость, когда звездочка вращается с постоянной скоростью. Опорные средства содержат вращающуюся цилиндрическую опору (10В), которая вращается вместе со звездочкой (3А), для направления звеньев цепи взаимодействием с опорными поверхностями, выполненными на звеньях (5), таким образом, что, когда опорная поверхность опирается на вращающуюся цилиндрическую опору (10В), расстояние между осью вращения и осью поворота является переменным. Такое выполнение передачи и цепи позволяет освободиться от эффекта многоугольника, снизить износ и шум. 2 н. и 9 з.п. ф-лы, 24 ил.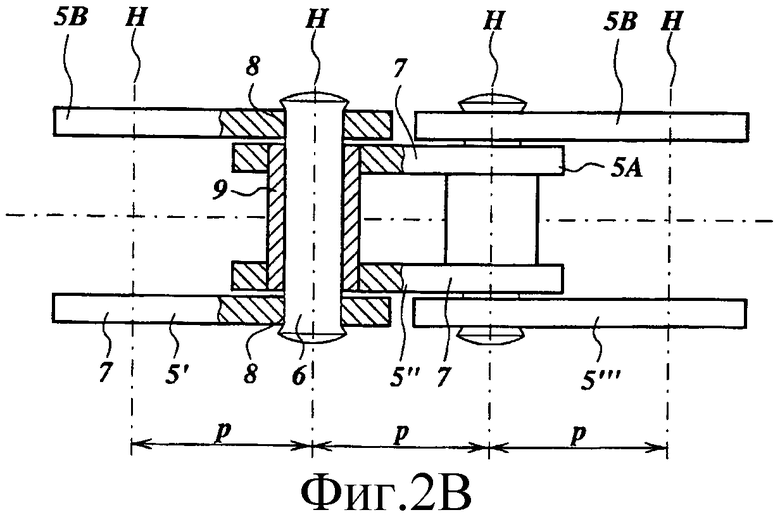
| Цепной привод | 1982 |
|
SU1203281A1 |
| Устройство для сварки с колебаниями сварочной горелки | 1981 |
|
SU1030122A2 |
| ЕР 0778428 A1, 11.06.1997 | |||
| Устройство для соединения листовой рассеры с рамой трактора | 1973 |
|
SU492404A1 |
| DE 19543287 A, 05.06.1997 | |||
| JP 61171942 A, 02.08.1986 | |||
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1184593A1 |

