Изобретение относится к ракетам классов “воздух-воздух” и “земля-воздух” /далее В-В и З-В/.
Известны аналогичные ракеты /см. например “История авиационного вооружения” Минск стр.444/. Они имеют крестообразное крыло и 4 аэродинамических руля, а также могут иметь дополнительно 4 газовых руля или интерцептора, 4 стабилизатора и 4 дестабилизатора. Ракеты других классов, например “воздух-поверхность” и баллистические, известны и с плоским крылом, и без крыльев. Но они не способны совершать энергичные маневры в двух плоскостях, что необходимо для перехвата воздушных целей.
В предлагаемой ракете реализуется 6 идей повышения ее эффективности.
Сущность №1 изобретения состоит в том, что ракета имеет плоское крыло /только две консоли/ и только два независимых аэродинамических руля, лежащих в той же плоскости. Возможны и желательны также два газовых руля /но не интерцептора/, лежащих в той же плоскости. Управление по крену осуществляется “ножницами” рулей высоты. Управлять по крену элеронами не имеет смысла, т.к. размах рулей на ракетах примерно равен размаху крыла или даже превышает его. И применение элеронов или интерцепторов только усложнит конструкцию и увеличит вес ракеты /потребуется 2 дополнительных привода и электропитание для них/.
Аэродинамическая стабилизация ракеты по тангажу /к ракете с плоским крылом применима самолетная терминология/ производится соответствующим местоположением крыла по длине ракеты. Для стабилизации ракеты по рысканью имеется 2 небольших киля, лежащих в перпендикулярной крыльям плоскости, или 4 киля, расположенных парами Х-образно или крестообразно.
Т.е. ракета имеет “самолетный” вид с одним существенным отличием: ее конструкция и управление симметричны относительно плоскости крыла без разделения на “верх” и “низ”. См. фиг.3, 4, 6. То есть ракета способна совершать маневры с одинаковой перегрузкой по тангажу как “вверх”, так и “вниз”.
Возможен, особенно для ракет В-В, вариант, когда ракета может не иметь килей. Для этого ракета должна иметь 2 дополнительных газовых руля уменьшенной мощности /примерно в 10 раз/ в плоскости, перпендикулярной крылу. Эти рули будут выполнять стабилизацию по рысканью и участвовать в создании крена на активном участке траектории. На пассивном участке траектории ракета не будет нуждаться в стабилизаторах, т.к. после выгорания топлива центр тяжести ракеты сдвинется ближе к передней части, и легкая задняя часть ракеты на большой скорости способна оказывать достаточное стабилизирующее действие. Следует также сознательно размещать более тяжелые части ракеты /боевая чать, электропитание/ ближе к носу.
Преимущества ракет с плоским крылом:
1. Меньше площадь крыльев и рулей /почти вдвое/, следовательно, меньше аэродинамическое сопротивление и больше скорость и дальность.
2. Меньше вес крыла и рулей /почти вдвое/ и меньше вес электроприводов рулей и газовых рулей, меньше вес источника электропитания, что позволяет ракете достигать большего ускорения, большей скорости, большей дальности и большей маневренности. Или же при равном весе иметь двигатель большего импульса или боевую часть большей массы.
Совокупность пунктов 1 и 2, т.е. меньшее сопротивление и более мощный двигатель, способна дать увеличение дальности примерно в 1,5 раза при прочих равных условиях.
3. Ракета оказывает меньшее влияние на скорость самолета-носителя на наружной подвеске. Или занимает меньше места во внутренних отсеках самолета, особенно если кили будут складывающимися или отсутствовать. Или же ракета требует меньшего транспортно-пускового контейнера для размещения на зенитной установке, что позволит увеличить количество ракет на такой установке. Контейнер может иметь форму, близкую к ромбической, особенно для варианта со складывающимися килями.
4. Ракета имеет меньшую радиолокационную заметность, что особенно важно при наружном размещении ракет на самолете.
5. Для бескилевого варианта ракет класса В-В /или со складывающимися килями/ становится возможным без ухудшения обтекаемости размещать ракеты в полуутопленном положении, во впадинах фюзеляжа самолета. Такое решение обеспечивает повышение скорости и уменьшение радиолокационной заметности самолета, и в то же время значительно проще и легче, чем размещение ракет в отсеках, и не сказывается на прочности фюзеляжа.
6. Можно реализовать преимущество в весе и аэродинамическом сопротивлении и другим образом - увеличить площадь плоского крыла по сравнению с полуплощадью крестообразного крыла, и получить улучшение маневренности. При этом экономия в весе все равно останется за счет меньшего количества рулей, газовых рулей, рулевых приводов и источника электропитания.
Не следует опасаться, что ракета с плоским крылом будет иметь худшую маневренность. Так как размеры ракеты в среднем на порядок /в 10 раз/ меньше размеров самолета, а момент аэродинамической инерции в среднем на два порядка /в 100 раз/ меньше, чем у самолета, то ракета всегда способна выполнить более резкий маневр, чем самолет.
Система наведения ракет с плоским крылом будет отличаться от крестообразных. Она должна обеспечивать одновременный маневр по тангажу и маневр по крену в сторону цели по кратчайшему углу поворота до тех пор, пока отклонение цели от продольной оси ракеты не станет чисто тангажным. После чего, отработав по тангажу, совместить ось головки наведения с целью.
Простейшая такая система состоит из четырехсекторного датчика ракурсности, сумматора его сигналов /сигналы соседних секторов должны быть разного знака/, и усилителей отдельно для левого и правого руля. Причем с сумматора один из сигналов подается на усилитель одного из рулей непосредственно, а второй такой же сигнал подается на усилитель другого руля через инвертор, меняющий знак сигнала на обратный. Это обеспечивает управление по крену.
Такая система работоспособна, даже если датчик выдает сигнал только о наличии отклонения от цели в одном из 4 секторов. Хотя при этом будет происходить “дрожание” рулей и плоскость крыльев не будет корелироваться с плоскостью горизонта.
Для более совершенного наведения желательно, чтобы датчик ракурсности выдавал сигнал не только о наличии цели в одном из секторов, но и о радиальном отклонении цели в секторе.
Такой датчик для работы в инфракрасном режиме состоит из образующих 4 сектора /противоположные сектора располагаются на одном уровне, а соседние - на разных, чтобы не было граничных зон нечувствительности/ двух слоев оптически прозрачного вещества, имеющего с обратной /по отношению к направлению излучения/ стороны прозрачный электропроводный слой, за которым расположен светочувствительный слой, за которым в свою очередь расположен резистивный слой /с большим электрическим сопротивлением, например угольное напыление/. Причем вблизи радиальных краев каждого сектора в зоне 5-15° резистивный слой имеет пониженное сопротивление /примерно в 1,5 раза/. Это сделано для того, чтобы условия растекания тока из любой точки дуги определенного радиуса были примерно равными, то есть сигнал об этом радиусе был сравнительно линейным. Токосъем с резистивного слоя осуществляется дугообразными шинами по дугообразному краю сектора.
Чем дальше от центра датчика будет метка сигнала цели, тем ближе будет электропроводящий участок светочувствительного слоя к токосъемной шине, и следовательно, тем больше будет ток датчика. Т.е. датчик выдает сигнал не только о ракурсности цели в одном из 4 секторов, но и о величине отклонения от цели /датчик ракурса и отклонения, далее ДРО/. см. фиг.11, 12.
Такой датчик обладает еще одним полезным свойством - чем ближе цель, тем больше пятно засветки от нее на светочувствительном слое, тем больше ток датчика, и тем резче реакция системы наведения.
Для еще более совершенной работы в системе наведения желательно наличие гироскопического датчика горизонтали /далее ГИРОС/, это позволит на прямых участках траектории располагать крыло параллельно горизонту. А также это позволит при небольших отклонениях цели по горизонтали создавать умеренный крен для плавной коррекции траектории.
Описанная система обеспечивает простейшую реакцию на цель - полет по кривой погони, и не предусматривает помехозащищенности.
Для повышения помехозащищенности датчик должен иметь в каждом секторе несколько /хотя бы 2/ дугообразных зон и общую центральную зону. Причем система наведения должна с помощью электронных ключей /двухтранзисторных схем/ блокировать сигналы других зон, если цель находится в одной из них. См. фиг.13.
Более совершенное и помехозащищенное наведение возможно с помощью процессора с памятью маневров.
Сущность №2 изобретения. На начальном участке полета /особенно ракет З-В/ управление ракетой целесообразно осуществлять с помощью газовых рулей. После сгорания топлива или раньше /если необходим энергичный маневр/ потребуется управление с помощью аэродинамических рулей или совместное. Если аэродинамические рули складывающиеся, то управление ими должно блокироваться до их раскрытия. В любом случае после сгорания топлива газовые рули становятся не нужны. Предлагаемая ракета имеет общий привод газового и аэродинамического рулей, который соединен с рулями управляемым в полете креплением /креплениями/ с возможностью поочередной и/или/ совместной работы рулей. Выигрыш - меньше масса, больше быстродействие.
В зависимости от типа привода /пневматический, электрический/ и кинематики /продольная, вращательная/ возможно много вариантов управляемого соединения и разъединения /см. А.Крайнев “Механика машин”, или И.И.Артоболевский “Механизмы в современной технике”/, поэтому графические материалы не приводятся.
Исполнительным механизмом управляемых креплений может быть пироцилиндр или пирозаряды.
Сущность №3 изобретения. Хвостовые стабилизаторы, по крайней мере такого размера, как у существующих ракет, нужны ей лишь в период разгона. Особенно это актуально для зенитных ракет, т.к. у них начальная скорость равна нулю. По мере набора скорости их площадь может быть уменьшена вплоть до нуля. Последнее обстоятельство объясняется тем, что двигатель у большинства ракет расположен сзади, и по мере выгорания топлива центр тяжести ракеты настолько сдвигается вперед /особенно если двигатель специально для этого спроектирован/, что пустая задняя часть ракеты может выполнять роль стабилизатора. См. фиг.2, где: ЦТ1 и ЦТ2 - центры тяжести ракеты до и после выгорания стартового заряда, а ЦБС1 и ЦБС2 - центры бокового сопротивления ракеты в этой плоскости до и после сброса стабилизаторов.
Предлагаемая ракета имеет основные или дополнительные стабилизаторы, сбрасываемые после выгорания части топлива или всего топлива. См. фиг.1-7. Для этого стабилизаторы закреплены на ракете управляемым в полете креплением, например пироштифтами /цилиндр с пирозарядом, в который входит штифт/. См. фиг.8.
Стабилизаторы могут быть закреплены на ракете индивидуально, например в Т-образном пазу /фиг.8. поз.12/ или на общей цилиндрической обойме /фиг.7 поз.7/. Последний вариант особенно пригоден для решетчатых стабилизаторов /фиг.7/.
На ракете с плоским крылом сбрасываемые стабилизаторы должны иметь бóльшую эффективность в направлении, перпендикулярном плоскости крыльев, т.е. крыловидные стабилизаторы должны быть расположены Х-образно ближе к плоскости крыла, а решетчатые должны иметь большую длину в плоскости крыла.
Для размещения ракет З-В с плоским крылом, в ромбических контейнерах стабилизаторы должны быть складывающимися. Для этого удобнее применить вариант с обоймой и четырьмя Х-образными стабилизаторами.
Преимущества ракет со сбрасываемыми стабилизаторами:
1. Меньше аэродинамическое сопротивление на марше, т.е. больше скорость и дальность.
2. Меньший вес и меньший момент инерции на марше, т.е. лучше маневренность.
3. Отсутствует на марше излишнее смещение центра аэродинамических сил в хвост, т.е. лучше поворотливость /маневренность/. Не нужны дестабилизаторы, меньше мощность привода рулей.
4. Если стабилизаторы сбрасываются после выгорания части топлива, например при двухрежимном двигателе, то импульс двигателя используется полезнее, т.е. больше скорость и дальность.
5. Меньше радиолокационная заметность на марше.
В совокупности первые четыре перечисленных преимущества дадут прирост дальности на 10-15% при прочих равных условиях.
Сущность №4 изобретения. Чтобы ракета со сбрасываемыми стабилизаторами имела минимальные кили или не имела их вовсе, необходимо как можно больше сместить центр тяжести в нос ракеты. Кроме обычных конструктивно-компоновочных мер предлагается особое устройство двигателя. Обычно сечение твердотопливного двигателя постоянно по его длине /см. там же, стр.406/.
У предлагаемого двухрежимного двигателя стартовая часть топлива размещена ближе к соплу и имеет широкий звездообразный канал с развитым ребрением. То есть легкая. А маршевая часть топлива расположена дальше от сопла и имеет узкий цилиндрический канал. То есть тяжелая. А еще лучше, если стартовая часть топлива будет иметь узкий канал, но выполнена из более быстрогорящего топлива. После общего зажигания вскоре выгорает часть маршевого топлива и все стартовое. Двигатель становится легче и его центр тяжести еще более сдвигается вперед. Если учесть, что двигатель составляет примерно 50% длины ракет класса В-В и примерно 75% ракет класса З-В, то дополнительные стабилизаторы можно сбросить сразу после выгорания стартового топлива.
Кроме указанных двух преимуществ двигатель имеет и третье - выгодное распределение тяги по длине полета. А именно: после набора сравнительно небольшой скорости 1,5-2 М тяга резко падает, и ракета летит некоторое время почти с постоянной скоростью. В отличие от обычных двухрежимных двигателей по мере приближения к цели тяга и скорость постепенно возрастают, что позволит ракете догнать цель и при необходимости совершить энергичный маневр. Начальной скорости 1,5-2 М вполне достаточно для стрельбы по низколетящим целям - на малой высоте скорость самолета обычно не превышает 1,35 М.
Особенно выгодна стрельба такими ракетами с земли или с самолета по целям со значительным превышением. По мере набора высоты ракета экономично - на умеренной скорости - преодолевает плотные слои атмосферы, а выйдя в разреженные слои атмосферы, резко ускоряется. Это позволит оптимальнее использовать импульс двигателя и достичь бóльших скоростей на большой высоте.
Стрельба ракетами с таким двигателем на одном уровне и с пренижением практически эквивалентна стрельбе с обычным двигателем.
Если есть возможность варьировать в достаточных пределах скорость горения твердого ракетного топлива, то аналогичную характеристику двигателя можно получить, разместив заряд более быстро горящего топлива ближе к соплу.
Ракета с таким двигателем незначительно уступает ракете с обычным двухрежимным двигателем только на малой дальности полета. Но это несущественно, т.к. экипаж самолета или зенитной установки всегда старается поразить цель на максимальном удалении.
Сущность №5 изобретения. Крыло, по крайней мере значительного размера, необходимо ракете лишь на заключительной стадии полета - для энергичного маневра по маневрирующей цели. На марше ракета со скоростью полета более 2 М может лететь без крыльев /за счет аэродинамических сил, возникающих на корпусе, и тяги двигателя/. Например, если ракета способна маневрировать с перегрузкой 30 g, то значит для горизонтального полета /перегрузка 1 g/ ей достаточна. 1/30 часть ее крыла /для ракеты с крестообразным крылом 1/60 часть/. Такую подъемную силу создает сам корпус ракеты.
Эта сущность изобретения имеет два варианта.
Вариант А. Ракета имеет крыло изменяемой стреловидности, в частности тандемное и обратной стреловидности.
Для лучшей маневренности желательно, чтобы центр подъемной силы крыла сдвигался вперед, и полет становился на грани устойчивости. Это позволит ракете острее реагировать на управляющее воздействие. Для этого желательно, чтобы уменьшение стреловидности происходило движением крыла вперед, против потока. Хотя такое движение требует большей мощности силового привода. В качестве такового удобно использовать пироцилиндр /пироцилиндры/.
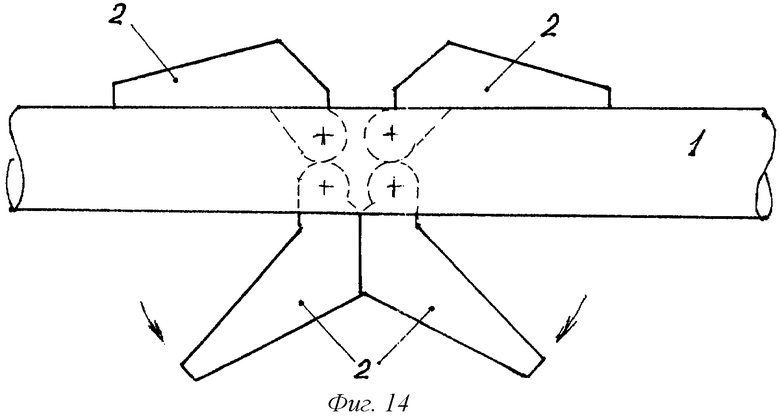
В тандемной схеме возможно сочетание, когда одно крыло раскрывается против потока, а второе - по потоку. См. фиг.14, где с одной стороны показаны крылья в сложенном положении, а с другой - в раскрытом.
Раскрытие должно блокироваться на 1-1,5 сек после пуска, хотя при стрельбе с самолета назад возможно раскрытие сразу после пуска. В дальнейшем раскрытие может производиться по сигналу отклонения рулей - например, при их отклонении на 70% от возможного. Или, если система управления или самонаведения определяет дальность до цели, то по дальности до нее. Например за 1500 м при встречных курсах, за 1000 м - при боковых, и за 500 м - при попутных. Возможен алгоритм срабатывания по комбинации этих параметров. В тандемной схеме возможно поочередное раскрытие крыльев по мере необходимого увеличения маневренности или подъемной силы. Также возможно поэтапное срабатывание одного крыла - сначала на стреловидность 30°, затем при необходимости - на 85°.
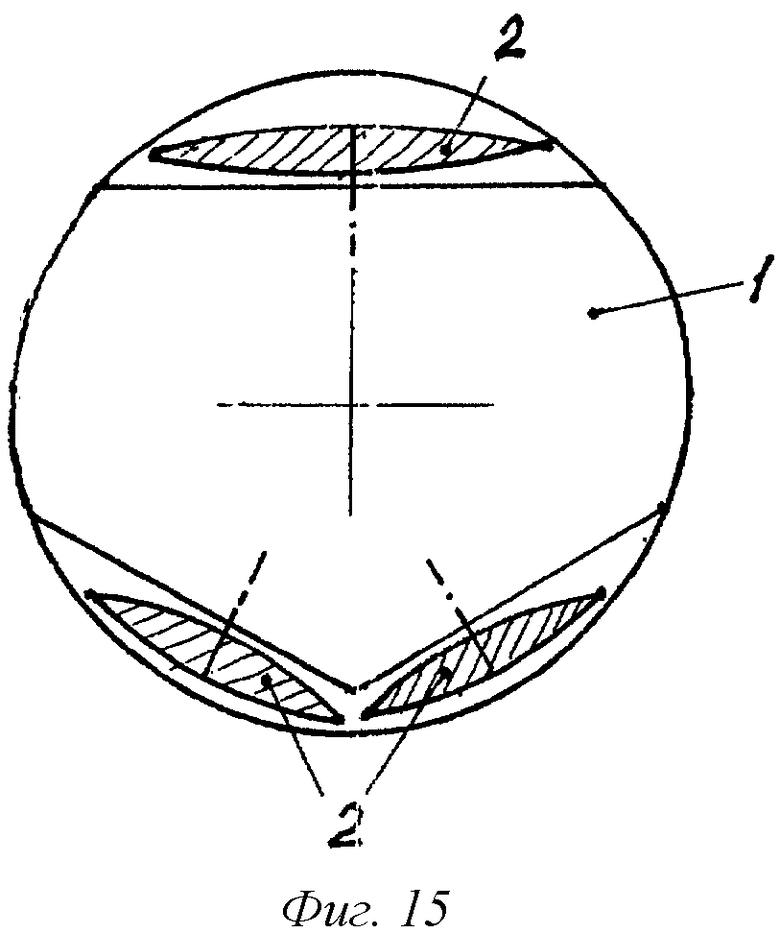
Вариант Б. Крыло в сложенном положении полностью убрано в мидель корпуса ракеты /как у крылатых ракет/. Можно осуществить это по несимметричной схеме “низкоплан - высокоплан”. Крылья расположены продольно в выемках /лысках/ на корпусе ракеты и раскрываются поворотом вокруг вертикальной или наклонной оси. См. фиг.15, 16. Если ось вращения расположена приблизительно в центре крыла по длине, то ракета превращается в биплан. Такая схема оптимальна с точки зрения прочности. На скоростях 3-4 М бипланные крылья не будут взаимовлиять друг на друга.
Так как в раскрытом положении крыло повернуто поперек потока и имеет максимальное удлинение и максимальную подъемную силу, то изначальная площадь крыла может быть значительно /в 2-3 раза/ уменьшена, что уменьшит вес и аэродинамическое сопротивление и увеличит скорость и дальность полета.
Не следует опасаться, что упрочнение крыла и фюзеляжа ракеты и наличие механизма раскрытия вызовут заметное увеличение веса ракеты. Современные композитные материалы, например по моему изобретению пат. 2308378 на основе высокомодульных высокопрочных и легких волокон /“Вектран”, “Спектра”/, позволят создать крыло и корпус ракеты без заметного увеличения веса и пироцилиндр из того же материала.
Сущность №6 изобретения. Полет ракеты до цели по баллистической траектории выгоднее, чем полет по прямой с использованием подъемной силы крыла или фюзеляжа. Он обеспечивает меньшее аэродинамическое сопротивление и при прочих равных условиях позволяет достичь большей дальности. Особенно с учетом того, что при этом полет будет происходить в более разреженных слоях атмосферы. Ракета при этом летит практически как снаряд, особенно это относится к ракетам с двухрежимным двигателем или к двухступенчатым.
Полет по баллистической траектории существующих противосамолетных ракет незначительно увеличит их боевую дальность. Но особенность этой идеи в том, что она предназначена для бескрылых /с убранными крыльями/ ракет. В таком сочетании она обеспечивает существенное увеличение скорости и дальности.
Для баллистического полета ракета должна иметь блок вычисления точки встречи и блок вычисления баллистической траектории с учетом тяги двигателя.
Ракета классов В-В или З-В, реализующая все 6 идей данного изобретения, выглядит так: относительно небольшое плоское крыло, полностью складывающееся /фиг.16/, сбрасываемые стабилизаторы или наличие двух газовых микрорулей в вертикальной плоскости, переключаемый привод рулей, двигатель со смещенным центром тяжести и особым распределением тяги, блок управления, реализующий алгоритм блокирования нерабочих зон датчика цели, вычисление точки встречи и баллистической траектории. Управление двойное - газовые рули и рули аэродинамические, желательно полностью складывающиеся. Оптимальная аэродинамическая схема - флюгерная “утка”, которая обеспечивает пропорциональное или регрессивное управление при любом тангаже без срывов и “просадок” /моя отдельная заявка, на изобретение, но по “Правилам” я не могу на нее ссылаться, и упоминаю лишь для того, чтобы показать, что такое управление существует/. Особо следует подчеркнуть, что такое управление не оказывает дестабилизирующего аэродинамического действия.
Примерно за 0,3 сек до окончания работы двигателя алгоритм процессора должен обеспечивать выпуск аэродинамических рулей, за 0,1 сек - включение их привода, через 0,1 сек - отключение газовых рулей от привода. При выпуске аэродинамических рулей возможен одновременный выпуск наиболее стреловидных крыльев /если их 2, 3 или 4/, или выпуск одного крыла на частичную стреловидность. Это улучшит аэродинамическую стабилизацию. При необходимости - выпуск крыла или крыльев полностью.
Такая ракета будет обладать минимальным весом пассивной части /все кроме двигателя в %/ и иметь минимальное из возможных аэродинамическое сопротивление /при сложенных рулях - ни одной выступающей детали/ на всем участке траекторий кроме последних ≈1000 м. Применение всех 6 идей позволит ракете того же веса и при прочих равных условиях иметь боевую дальность в 2-2,5 раза больше.
Кроме того, отсутствие выступающих частей позволит придать ракете “стелс”-форму и сделать ее невидимой для радаров.
Кроме того, такая ракета будет в минимальной степени снижать скорость самолета-носителя и занимать минимальный объем в отсеках самолета или в транспортно-пусковом контейнере зенитной установки. Последнее позволит повысить количество ракет на одной установке.
На фиг.1-6 показана ракета с плоским крылом и сбрасываемым стабилизатором. На фиг.7 - вариант со сбрасываемым решетчатым стабилизатором 6. Здесь и далее: 1 - корпус, 2 - крыло, 3 - рули, 4 - стабилизаторы, 5 - кили, 7 - обойма.
На фиг.8 изображен двигатель со смещенным центром тяжести и показано крепление сбрасываемого стабилизатора. Здесь: 8 - пироцилиндр с пирозарядом 9 и штифтом 10. Штифт входит в паз 11 в стабилизаторе 4. Стабилизатор закреплен в Т-образном пазу 12.
Двигатель состоит из корпуса 13 с саморегулирующимся соплом 14 с подпружиненным центральным телом. В задней части двигателя размещен стартовый заряд 15 твердого топлива, а в передней части размещен маршевый заряд 16.
На фиг.9 изображены упрощенно графики тяги F и скорости М в зависимости от времени τ.
На фиг.10 изображен возможный вариант системы самонаведения ракеты с плоским крылом. Здесь: ДРО - датчик ракурсности и отклонения, ГИРОС - гироскопический датчик горизонтали, 17 - предварительные усилители, К - усилитель, Е - сумматор, ИН - инвертор знака сигнала, ЛР и ПР - усилители левого и правого аэродинамических рулей при схеме “утка” /для хвостового и газовых рулей - наоборот/.
На фиг.11, 12 изображен датчик для этой системы. Здесь: 18 - прозрачные пластины, покрытые с обратной /на чертеже - с нижней/ стороны прозрачным токопроводящим слоем, 19 - светочувствительные слои, 20 - резистивные слои, 21 - токосъемные дугообразные шины, 22 - провода.
На фиг.13 изображен помехозащищенный вариант датчика и дополнительная часть системы наведения из предварительных усилителей 17 и электронных ключей 26 /изображен один сектор/. Здесь: 23 - внешняя зона сектора, 24 - внутренняя, 25 - общая центральная.
На фиг.14 изображен фрагмент ракеты со сложенным и раскрытым /с другой стороны/ тандемным крылом.
На фиг.15, 16 изображены два варианта полностью убирающихся крыльев 2 и убирающихся рулей 3 /сверху в сложенном, снизу в раскрытом виде/.
Работает ракета на фиг.1-7 так: пуск осуществляется со стабилизаторами 4 или 6, которые после выгорания стартового топлива и смещения центра тяжести вперед из точки ЦТ1 в точку ЦТ2 сбрасываются /фиг.3, 4, 6/. При этом центр бокового сопротивления в плоскости тангажа смещается из точки ЦБС1 в точку ЦБС2 /боковое сопротивление флюгерных рулей близко к нулю/. Но и в первом, и во втором случае остается позади центра тяжести.
В полете ракета управляется по тангажу и крену раздельным отклонением рулей 3 и, возможно, двумя газовыми рулями /не показаны/. Крылья 2 создают подъемную силу и стабилизирующий момент по тангажу. По направлению стабилизация осуществляется небольшими килями 5.
По мере необходимости газовые рули могут отключаться, а аэродинамические - подключаться.
Стабилизаторы 4 крепятся к ракете в Т-образном пазу 12 и фиксируются штифтами 10. При подаче сигнала на пирозаряд 9 /например, от реле времени/ он срабатывает и выталкивает штифты в паз 11. Стабилизатор выскальзывает из паза под действием набегающего потока воздуха и ускорения от тяги двигателя.
Твердотопливный двигатель работает так: сначала выгорает стартовый заряд 15 и центр тяжести смещается вперед. Затем с постеленным увеличением тяги сгорает маршевый заряд 16.
Система наведения работает так: ракета стартует и благодаря датчику ГИРОС стремится принять горизонтальное положение. При отклонении цели ее сигнал появляется в одном из секторов /квадрантов/ датчика ДРО. Сигнал пропорционален расстоянию от центра датчика. Сигнал одновременно подается на усилитель одного из рулей и на сумматор Е. Усилитель ПР или ЛВ отклоняет один из рулей в нужную /+ или -/ сторону, и ракета одновременно изменяет тангаж и крен. Одновременно сигнал с сектора ДРО подается на сумматор Е, где сравнивается по величине и знаку с сигналом датчика ГИРОС, усиленным в К раз /например в 10/. Получившийся сигнал подается на один из усилителей ЛР непосредственно, а на другой усилитель ПР - через инвертор знака сигнала ИН. Воздействие этих сигналов приведет к тому, что "ножницы" рулей создадут крен в сторону цели, пропорциональный ее отклонению от центра датчика /например, при угловом отклонении цели 1° крен составит 10° и т.д./. При отклонении до края датчика крен должен составить 90°.
Суммарное действие всех трех сигналов приводит к тому, что при больших отклонениях отметка цели сначала загоняется в плоскость тангажа /вертикаль на рисунке ДРО/, а затем и в центр датчика ДРО. При этом результирующий сигнал четырех секторов ДРО равен нулю, и под действием датчика ГИРОС крыло принимает горизонтальное положение.
Датчик на фиг.11, 12 работает так: инфракрасный сигнал от цели попадает через объектив /не показан/ на какой-то участок светочувствительного слоя 19 одного из секторов. Чтобы не было “мертвых зон” на границах секторов, они попарно /I-III и II-IV/ расположены на разных уровнях. Электрический ток проходит по токопроводящему слою пластины 18, через пятно засветки в светочувствительном слое 19 и через резистивный слой 20 на токосъемную шину 21. Предварительными усилителями 17 ток преобразуется в примерно пропорциональный сигнал.
На фиг.13 показан помехозащищенный вариант такого же датчика. Он состоит из внешней 23 и внутренней 24 зон сектора и общей центральной зоны 25. При нахождении засветки цели в одной из зон сигналы других секторов и зон блокируются электронными ключами 26. Это исключает влияние других засветок от других целей, солнца и ракет-ловушек.
Крыло изменяемой стреловидности работает так: при необходимости два продольных тандемных крыла 2 поворачиваются навстречу друг другу и образуют одно крыло типа "бабочка" большего размаха и удлинения. Возможно поочередное срабатывание крыльев.
Убирающиеся крылья на фиг.15, 16 работают так: стартует ракета с убранными крыльями 2 и рулями 3. При необходимости энергичного маневра или после выгорания топлива выпускаются сначала рули 3 и маленькое крыло с наибольшей стреловидностью 60°. По мере необходимости - второе маленькое крыло со стреловидностью 30°, а затем - большое крыло с: малой стреловидностью. Предлагаемая ракета будет не только значительно эффективнее и удобнее существующих, но и значительно дешевле их /меньше органов и приводов управления, при тех же тактико-технических характеристиках примерно в 1,5 раза меньший вес/.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА И СПОСОБ ЕЁ РАБОТЫ | 2014 |
|
RU2590760C2 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| Противосамолётная ракета - 2 | 2017 |
|
RU2659436C1 |
| ПРОТИВОВЕРТОЛЕТНАЯ И ПРОТИВОСТЕЛСОВАЯ РАКЕТА | 2009 |
|
RU2443968C2 |
| КОСМИЧЕСКАЯ РАКЕТА /ВАРИАНТЫ/ И СПОСОБ ЕЕ ПОСАДКИ | 2014 |
|
RU2568630C1 |
| Самолёт дальнего радиолокационного обнаружения | 2016 |
|
RU2639374C1 |
| ПЕРЕНОСНОЙ ЗЕНИТНО-РАКЕТНЫЙ КОМПЛЕКС /ВАРИАНТЫ/ | 2012 |
|
RU2514324C1 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| Штурмовик - 2 (варианты) | 2017 |
|
RU2655588C1 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |













Группа изобретений относится к ракетам классов "воздух-воздух» и «земля-воздух». Противосамолетная ракета содержит двигатель, боевую часть и систему наведения, имеющую датчик ракурсности в виде четырех секторов светочувствительного материала. За каждым сектором имеется резистивный слой, имеющий вблизи радиальных краев каждого сектора в секторной зоне 5-15° пониженное сопротивление. Противосамолетная ракета, у которой хвостовые основные или дополнительные стабилизаторы порознь или на общей обойме закреплены управляемым в полете креплением с возможностью сброса, имеет крыло переменной стреловидности. Противосамолетная ракета имеет убирающееся крыло или крылья. Противосамолетная ракета для полета по баллистической траектории имеет блок вычисления точки встречи, блок вычисления времени пути и блок вычисления баллистической траектории с учетом тяги двигателя. Достигается повышение эффективности. 5 н. и 3 з.п. ф-лы, 16 ил.
1. Противосамолетная ракета, содержащая двигатель, боевую часть и систему наведения, имеющую датчик ракурсности в виде четырех секторов светочувствительного материала, отличающаяся тем, что за каждым сектором имеется резистивный слой, имеющий вблизи радиальных краев каждого сектора в секторной зоне 5-15° пониженное сопротивление.
2. Датчик по п.1, отличающийся тем, что каждый сектор состоит из нескольких дугообразных зон и имеет в центре круглую общую зону, причем сигнал с любой зоны блокирует сигналы других зон с помощью электронных ключей.
3. Противосамолетная ракета, состоящая из двигателя, боевой части и системы наведения, отличающаяся тем, что хвостовые основные или дополнительные стабилизаторы порознь или на общей обойме закреплены управляемым в полете креплением с возможностью сброса.
4. Ракета по п.3, отличающаяся тем, что управляемым креплением являются штифты, входящие в цилиндр с пирозарядом.
5. Противосамолетная ракета, состоящая из двигателя, боевой части и ситемы наведения, отличающаяся тем, что имеет крыло переменной стреловидности.
6. Противосамолетная ракета, состоящая из двигателя, боевой части и системы наведения, отличающаяся тем, что имеет убирающееся крыло или крылья.
7. Ракета по п.6, отличающаяся тем, что крыло /крылья/ убираются в лыски на корпусе ракеты.
8. Противосамолетная ракета, состоящая из двигателя, боевой части и системы наведения, отличающаяся тем, что для полета по баллистической траектории имеет блок вычисления точки встречи, блок вычисления времени пути и блок вычисления баллистической траектории с учетом тяги двигателя.
| ОСТОСЛАВСКИЙ И.В., СТРАЖЕВА И.В | |||
| ДИНАМИКА ПОЛЕТА | |||
| ТРАЕКТОРИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | |||
| - М.: МАШИНОСТРОЕНИЕ, 1969, с.94-95, рис.2.3 | |||
| ЛОКК А.С | |||
| УПРАВЛЕНИЕ СНАРЯДАМИ | |||
| - М.: ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ, 1958 с.74, 75, рис.2.19 | |||
| ПЕТРОВ В.П., СОЧИВКО А.А | |||
| УПРАВЛЕНИЕ РАКЕТАМИ | |||
| - М.: ВОЕННОЕ ИЗДАТЕЛЬСТВО МИНИСТЕРСТВА |

