Изобретение относится к многоразовым аэрокосмическим системам (далее «космолет»).
Известны подобные системы, см., например, «Битва за звезды», Первушин Антон, М., 2004, стр.203, или пат. № RU 2087389, состоящие, как правило, из двух ступеней - атмосферной (первой) и космической (второй). Их условно можно разделить на вертикально взлетающие и горизонтально взлетающие. И те и другие имеют свои преимущества и недостатки. Горизонтально взлетающие системы имеют те преимущества, что не требуют специального оборудования для старта, взлетают и приземляются на обычные аэродромы, не требуют мощных турбореактивных, двухконтурных или прямоточных воздушнореактивных двигателей (далее ТРД, ДТРД и ПВРД). Все известные горизонтально взлетающие системы были построены по параллельной схеме, которая имеет существенный недостаток - примерно вдвое повышенное аэродинамическое сопротивление на атмосферном участке полета из-за наличия в потоке двух параллельных фюзеляжей и интерференции между ними на сверхзвуковых скоростях.
Вертикально взлетающие системы имеют другие преимущества: быстрое прохождение плотных слоев атмосферы с минимальным расходом топлива, малое время выхода на орбиту (это важно для военных аппаратов), отсутствие необходимости в аэродроме и, следовательно, возможность старта с высокой горы, или из акватории океана, или с острова вблизи экватора (этим надо непременно воспользоваться), меньшая площадь крыльев (для горизонтального взлета они не используются). А также возможность самостоятельной доставки к месту старта с вертикальной посадкой «хвостом вниз» на специальное устройство (см. ниже).
Однако применение горизонтально или вертикально взлетающего космолета продольной схемы с крыльями довольно затруднительно. Это объясняется тем, что в процессе полета топливо расходуется только из первой ступени космолета, и поэтому при применении последовательной схемы космолета, когда вторая ступень находится впереди и в миделе второй ступени, центровка нарушилась бы настолько, что аэродинамическое управление космолетом на атмосферном участке полета стало бы невозможным. Или, при другом расположении крыльев, стало бы невозможным управление первой и второй ступенью порознь на спускаемом участке траектории.
Задача и технический результат изобретения - использование преимуществ аэрокосмической системы вертикального взлета продольной компоновки и устранение ее недостатков, то есть возможность управления всей системой на взлете, и управление порознь обеими ступенями при их посадке на землю. Конечный результат - больший процент выводимой на орбиту массы от стартовой массы всей системы.
С изобретением мной ДТРД, который будет иметь тяговое отношение на форсаже около 1:40 (заявка №2011102733), и его гиперзвукового варианта (номер заявки пока не известен), а также системы управления самолетом разнотягой без аэродинамических рулей (заявка №2011104836) стало возможным и целесообразным создание такой системы. Осталось решить только один вопрос - обеспечение продольной остойчивости полета в атмосфере при значительном изменении центровки. Рассмотрим возможные варианты космолета.
ВАРИАНТ 1. Данный космолет содержит первую и вторую ступень, имеющие крылья, и имеет воздушнореактивные (ТРД, ДТРД, ПВРД) двигатели на первой ступени, причем первая и вторая ступени соединены последовательно, то есть фюзеляж второй ступени находится в миделе первой ступени. Как указывалось выше, это позволит минимизировать аэродинамическое сопротивление, позволит придать второй ступени гиперзвуковую скорость и позволит вывести ее на большую высоту прежде, чем произойдет разделение ступеней.
А для обеспечения регулирования положения аэродинамического фокуса в соответствии с меняющейся центровкой можно применить обычные элевоны, только увеличенного размера. Космолет имеет на крыльях первой и/или второй ступеней элевоны, составляющие 30-60% от хорды крыла в данном сечении (обычно они не превышают 20%). То есть в максимальном случае - вплотную к лонжерону крыла. Следует принять меры, чтобы оставшаяся часть крыла имела достаточную прочность и жесткость.
Работает этот вариант так: при облегчении первой ступени вследствие выработки топлива элевоны на ней поднимаются вверх, уменьшая подъемную силу, и/или элевоны на второй ступени опускаются вниз, увеличивая подъемную силу.
ВАРИАНТ 2. Отклонение элевонов ухудшает аэродинамическое качество крыла, поэтому для уменьшения подъемной силы крыла первой ступени можно менять его установочный угол. Для этого космолет имеет центроплан, вращающийся относительно поперечной оси космолета. То есть для уменьшения установочного угла центроплан поворачивается вниз (его передняя часть - все направления даны относительно условно сборочного горизонтального положения космолета кабиной вверх).
Для повышения жесткости конструкции крыло может иметь второй лонжерон или траверсу на главном лонжероне (единственном при однолонжеронной схеме крыла), которая закреплена на вспомогательном центроплане, имеющем возможность перемещаться по дуге в прорези фюзеляжа. Разумеется, фюзеляж в этом месте должен быть соответствующим образом усилен.
Работает этот вариант так: по мере смещения центра масс центроплан поворачивается и установочный угол уменьшается.
ВАРИАНТ 3. Можно также уменьшить подъемную силу крыла первой ступени другим способом - космолет на первой ступени имеет крыло, внешние части консолей или целиком консоли которого отклоняются вверх относительно оси, параллельной продольной оси. То есть если отклоняются части консолей, то крыло становится таким, как у палубной авиации в сложенном состоянии - концы консолей подняты вертикально. А если отклоняется вся консоль крыла, то значительно увеличивается угол поперечного V, что при углах около 30-45 градусов резко снижает подъемную силу.
ВАРИАНТ 4. Однако более целесообразно не уменьшать подъемную силу крыла первой ступени, а сдвинуть крыло вперед вслед за меняющимся центром масс. Для этого крыло первой и/или второй ступени закреплено на центроплане, закрепленном с возможностью продольного перемещения в фюзеляже. Достаточно, если крыло будет подвижным только в первой ступени.
Осуществить это не так сложно, как кажется. Для этого крыло закреплено на центроплане, представляющем собой каретку, скользяще или на колесах (например, с ребордами) закрепленную в фюзеляже в направляющих (рельсового или швеллерообразного типа). Крепление каретки не должно допускать ее перекоса относительно продольной оси фюзеляжа. Такая каретка несущественно увеличит массу космолета, но является прочным и надежным креплением крыла.
Этот вариант позволит несколько перераспределить площади крыльев при сохранении их общей площади, то есть позволит уменьшить площадь крыла второй ступени, масса которого входит в конечную выводимую массу. Это позволит выводить на орбиту бо'льшую полезную нагрузку, хотя и несколько увеличит посадочную скорость второй ступени (но это решаемая проблема - достаточно удлинить аэродром).
Работает этот вариант так: по мере смещения центра масс космолета вперед, крыло первой или обеих ступеней гидроцилиндрами сдвигается вперед. Перед расцеплением гидрожидкость из цилиндров быстро стравливается, и крылья под действием набегающего потока воздуха быстро становятся на место. Это необходимо, чтобы обе ступени порознь имели продольную устойчивость.
Чтобы безошибочно синхронизировать постановку крыла в заднее положение и отделение второй ступени, космолет может иметь блокировку, которая не допускает отделения ступени при нахождении крыла не в заднем положении и автоматически разделяет ступени при возврате крыла в заднее положение. Если на крыльях будут иметься двигатели, то для быстрого смещения крыла назад следует резко отключить эти двигатели.
Можно также применить на первой ступени крыло изменяемой стреловидности. Но так как центр масс при выработке топлива смещается вперед, то стреловидность должна быть обратной, что значительно усложняет задачу (консоли должны иметь повышенную прочность и жесткость).
ВАРИАНТ 5. Но может быть удастся вообще обойтись без какого-либо изменения аэродинамики. Смещение центра масс вперед приводит к появлению пикирующего момента по тангажу, и если компенсировать этот момент хотя бы частично, в пределах регулировочных возможностей ПГО и элевонов, то можно обойтись без вышеизложенных вариантов 1-4. Для этого космолет имеет на первой ступени прямоточные воздушнореактивные двигатели (ПВРД), которые установлены ниже (относительно условно сборочного положения космолета) центра масс. Они создают по тангажу кабрирующий момент, который полностью или частично будет компенсировать пикирующий момент от смещения центра масс.
Причем, эта компенсация будет иметь свойство некоторого саморегулирования: по мере полета и расхода топлива будет все больше смещаться центр масс, но одновременно будет увеличиваться скорость, с ростом которой, как известно, увеличивается тяга прямоточного двигателя. Жаль только, что при этом с ростом высоты будет уменьшаться плотность воздуха, с уменьшением которой тяга прямоточного двигателя падает.
ВАРИАНТ 6. На всех существующих аэрокосмических системах использовались треугольные крылья большого удлинения с элевонами. Но управление с помощью элевонов недостаточно эффективно в режиме посадки (например, на «Буране» имеется дополнительный балансировочный щиток) и отрицательно сказывается на подъемной силе крыла. То есть желательно применить отдельные рули высоты, например, ПГО (переднее горизонтальное оперение), желательно цельноповоротное. При этом ПГО первой ступени оказывается при полностью заправленной и при полностью пустой первой ступени по разные стороны от центра масс. Можно было бы просто зафиксировать это ПГО в оптимальном положении, но при этом ухудшится управление по тангажу. Поэтому в данном варианте космолета на первой и второй ступенях имеется переднее горизонтальное оперение, причем оперение первой ступени работает как «утка», когда центр масс находится позади него, как заднее, когда центр масс становится впереди него, и занимает положение с оптимальным углом атаки, когда центр масс совпадает с ним.
Следует отметить, что подобная аэродинамическая система работоспособна только при применении управления «Регрессивная флюгерная утка» по пат. № RU 2410286, желательно, в электродистанционном варианте.
ВАРИАНТ 7. В этом варианте космолета также на первой и второй ступенях имеется переднее горизонтальное оперение. Это оперение обеспечивает обеим ступеням хорошую маневренность по тангажу и большую подъемную силу в режиме посадки. Однако управление всей системой, которая в аэродинамическом смысле является неравновеликим тандемом, вполне эффективно и без ПГО первой и второй ступеней, которые в этом режиме являются балластом. Управление тандемом, как известно, достаточно эффективно осуществляется перераспределением подъемной силы между передним и задним крыльями с помощью элевонов, которые теперь правильнее назвать закрылками или флаперонами. Чтобы можно было полезно использовать ПГО обеих ступеней и в этом режиме, все четыре горизонтальных аэродинамических поверхности (относительно условного сборочного положения космолета, то есть два крыла и два ПГО) имеют положительный угол атаки и создают подъемную силу. Это позволит достичь большего потолка и позволит второй ступени вывести больший груз в околоземное пространство.
ВАРИАНТ 8. Для посадки крылатых ступеней аэрокосмических систем обычно используется колесное или лыжное шасси. Однако наличие шасси увеличивает вес и стоимость и уменьшает надежность и прочность любого летательного аппарата. Вертикально взлетающему космолету шасси на первой ступени не нужно, а для посадки, в частности промежуточной, первая и/или вторая ступень данного космолета имеет в передней части фюзеляжа убирающийся или неубирающийся крюк для вертикальной посадки ступени или всего космолета методом «хвостом вниз» на цепь или трос. Ввиду малого размера крюка его лучше сделать неубирающимся, придав ему форму пилона.
Этот вариант имеет особо важное значение. И важность его не только в том, что экономится масса шасси и механизмов его выпуска, облегчается фюзеляж, повышается его прочность и жесткость. А самое главное в том, что космолет с таким крюком и соответствующей системой управления может в экономичном режиме самостоятельно долететь от места изготовления до места старта и совершить там посадку, причем ему не потребуется аэродром и вообще любые подъездные пути. Место старта может располагаться на высокой неприступной горе, на острове в океане вблизи экватора, а еще лучше - на высокой горе вблизи экватора (идеальное место с высотой 6272 м имеется в Эквадоре). На месте старта должны быть лишь две прочных мачты с висящей между ними цепью (см. патент № RU 2335437) или с двумя цепями (для крюков первой и второй ступеней) и три бака: с авиационным керосином, с ракетным горючим (им может быть тот же керосин) и с ракетным окислителем. Если горючее и окислитель криогенные, то они могут быть заранее доставлены туда вертолетами, потребуется лишь небольшая установка по их охлаждению. Следует отметить, что лететь космолет должен с полностью заправленными баками, чтобы иметь правильную центровку. Прилетев, космолет повисает на цепи, дозаправляется, причем, возможно, даже не выключая двигатели, и стартует в космос. Если выводимая нагрузка небольшая, можно стартовать с места изготовления.
Для посадки всего космолета потребуется две цепи, расположенные по высоте на таком же расстоянии, как и крюки на космолете. Причем цепи желательно подпружинить, чтобы в нужной пропорции распределить нагрузку на первую и вторую ступень (на первую, конечно, больше). Подпружинить можно в прямом смысле, расположив между цепью и мачтой две мощных пружины растяжения, а можно применить намотку на барабаны, к которым приложен крутящий момент, например, от пневмодвигателя. Цепи или тросы для первой и второй ступени могут быть разной толщины.
Работает седьмой вариант так: первая ступень в горизонтальном полете подлетает к посадочному устройству с поперечно висящим цепью или тросом, делает кабрирование и, удерживая ступень хвостом вниз с помощью тяги двигателей, подводит крюк к цепи или тросу и повисает на нем. Вторая ступень садится на колесное или на лыжное шасси.
Возможен и взлет космолета с тележки, что также позволяет отказаться от шасси на первой ступени. Но при достаточной тяговооруженности целесообразен вертикальный взлет.
ВАРИАНТ 9. Все существующие или проектировавшиеся аэрокосмические аппараты имели люк для полезной нагрузки в верхней части фюзеляжа. Это объясняется тем, что там он не подвержен перегреву при посадке. Но на нижней поверхности аппарата все равно имеются три люка для колесного шасси. И общее количество люков можно уменьшить. Для этого космоплан имеет грузовой люк на нижней поверхности фюзеляжа второй ступени (относительно условно сборочного положения, то есть положения второй ступени при посадке), который одновременно служит для выпуска-уборки шасси. Но это не единственное преимущество такого решения - если створки люка сделать раскрывающимися на угол около 180 градусов (150-210), то раскрывшиеся створки служат дополнительными аэродинамическими поверхностями, уменьшающими посадочную скорость.
ВАРИАНТ 10. Однако вариант 9 - это не единственная возможность использовать грузовой люк по принципу «два в одном». Данный вариант космолета имеет грузовой люк на верхней части фюзеляжа второй ступени, причем люк имеет четыре продольные створки (по две соосных слева и справа), передние две из которых открываются на угол до +-80 градусов к горизонтали (оптимально - горизонтально) и служат дополнительными несущими аэродинамическими поверхностями, а задние две открываются на угол до +-80 градусов к вертикали (оптимально - вертикально), имеют на задней части створок отклоняемые поверхности и служат килями и/или задними рулями высоты (при отклонении на угол около 45 градусов в разные стороны две створки становятся похожи на V-образное хвостовое оперение, а их поворотные поверхности становятся «рулями»). Это позволит отказаться от киля на второй ступени и позволит уменьшить массу и аэродинамическое сопротивление космолета.
Но это решение даже не «два в одном», а «три в одном», так как отсутствие киля на второй ступени позволяет отказаться от киля на всем космолете, то есть на первой ступени. Если бы киль был только на второй ступени, космолет не имел бы устойчивости по направлению, и полет был бы невозможен. Кстати, эксперименты с летающими малоразмерными самолетами (авиамоделями) показали, что летательный аппарат типа самолета может устойчиво летать вообще без киля. Управление по направлению при этом производится креном аппарата, особенно, если это автоматическое управление по гироскопам.
Как хорошо знают авиаконструкторы, любой выигрыш тянет за собой целую цепь последствий: отсутствие киля на второй ступени уже потянуло за собой отсутствие киля на первой ступени, что в сумме уменьшает аэродинамическое сопротивление и массу космолета на режиме взлета, то есть к моменту разделения на ступени космолет наберет бо'льшие высоту и скорость и выведет на орбиту бо'льшую полезную нагрузку. Выигрыш превысит массу «сэкономленного» киля в 4-5 раз.
Более того, управляя углом открытия передних створок, можно осуществлять смещение аэродинамического фокуса второй ступени в посадочном режиме в зависимости от центровки, то есть в зависимости от того, возвращается ступень пустая или со спутником внутри. Это еще один технический результат данного способа.
При небольшом теплозащитном покрытии передних створок, например пирографитом, модифицированным нейтронным облучением, можно совместно с ПГО и элевонами использовать их на «горячем» участке посадки для управления по тангажу (балансировочный щиток, имевшийся на «Буране», становится не нужен). А при отклонении их порознь - и для управления по крену.
Для улучшения обтекаемости передние кромки передних створок желательно заострить по дуге изнутри (как носок крыла), а задние кромки - по прямой линии, с которой будет сопрягаться заострение передней кромки задней створки снаружи. Задняя кромка задних створок должна быть заострена по дуге изнутри.
Отклонение задней части задних створок не вызывает никаких технических трудностей, если створки плоские. Но если они дугообразные в поперечном сечении, то возможны следующие варианты.
Вариант 10-а. Задняя часть задних створок состоит из нескольких продольных поверхностей, которые поочередно (как рыбья чешуя) или в шахматном порядке заходят одна на другую и отклоняются синхронно.
Работает устройство так: при отклонении внутрь или наружу дуги створок несколько продольных поверхностей сближаются или отдаляются, и перехлест обшивки при этом не позволяет появляться зазорам.
Вариант 10-б. Задняя часть задних створок отклоняется влево и вправо относительно разных осей вращения, которые образуют три или более плоских шарнира, расположенные на штоках своих гидроцилиндров или электоталрепов (резьбовая штанга переменной длины с электроприводом), причем как минимум два гидроцилиндра или электроталрепа с одной стороны закреплены на створке жестко, и шарниры на их штоках образуют ось вращения, перемещающуюся продольно, а один или более гидроцилиндров или электоталрепов с другой стороны створки закреплены шарнирно, и шарнир/шарниры на их штоках образуют ось вращения, перемещающуюся продольно и поперечно.
Работает устройство так: при отклонении таких «рулей» наружу дуги работают только внутренние гидроцилиндры или электроталрепы, а наружные находятся в полностью втянутом положении. При отклонении «рулей» внутрь дуги - наоборот.
Вариант 10-в. Возможен другой принцип действия таких «рулей»: задняя часть задних створок состоит из нескольких продольных поверхностей, которые имеют возможность поворачиваться относительно осей, проходящих или параллельных хорде дуги створки, причем боковые поверхности всех упомянутых поверхностей перпендикулярны хорде дуги створки.
Работает устройство так: так как отдельные продольные поверхности задних частей задних створок перемещаются параллельно, и их боковые поверхности параллельны, то их поворотам ничто не мешает.
Вариант 10-г. Однако вполне достаточной эффективности таких килей можно добиться, отклоняя только один из них. То есть задняя часть левой задней створки отклоняется только влево, а задняя часть правой задней створки отклоняется только вправо, причем относительно оси вращения, выходящей за пределы обшивки створки (то есть на выносных пилонах) или не выходящей за ее пределы (как дверца у автомобиля). Для экспертизы - в обоих сочетаниях альтернативных признаков с другими обеспечивается один и тот же технический результат - возможность открытия задней части задней створки в одну сторону.
Работает устройство так: при необходимости поворота аппарата вправо отклоняется наружу (то есть наружу дуги створок) только правая створка, и наоборот. Так как отклонению наружу дуги в этом случае ничто не мешает, то поворот возможен.
ВАРИАНТ 11. Если по каким-то причинам варианты 8 или 9 окажутся неприемлемыми (они взаимоисключающие), то следует хотя бы сделать киль/кили второй ступени убирающимися. Как сказано выше, это позволит отказаться от киля на первой ступени и сэкономить на массе и аэродинамическом сопротивлении всего космолета.
Управление космопланом в режиме взлета и первой ступенью в режиме посадки должно осуществляться с помощью изобретения «Управление разнотягой», заявка №2011104836, которое создано специально для отказа от киля, стабилизаторов и рулей высоты, а также для управления в режиме висения «хвостом вниз».
ВАРИАНТ 12. Вторая ступень космолета должна иметь сравнительно большой запас ракетного топлива, поэтому, чтобы ее центровка с полными баками, с пустыми баками, с полезной нагрузкой и без нее (при спуске) была в заданных пределах, вторая ступень имеет два отсека для топлива, расположенные по обе стороны от грузового отсека.
ВАРИАНТ 13. Для уменьшения массы баков для ракетного топлива, а значит для уменьшения конечной выводимой массы, вторая ступень после разделения с первой может сначала разгоняться твердотопливным ракетным двигателем (ускорителем), расположенным между первой и второй ступенью. То есть космолет имеет между первой и второй ступенями ракетный ускоритель и становится практически трехступенчатым, что, как известно, повышает % выводимой массы.
С помощью твердотопливного двигателя можно регулировать конечный импульс космолета в зависимости от полезной нагрузки. То есть - применять его для вывода особо тяжелой нагрузки. Хотя стоимость такого ускорителя будет невелика, и он может являться одноразовой составной частью основного комплекса космолета. Отделяться от второй ступени он будет уже в безвоздушном пространстве и, скорее всего, будет сгорать в атмосфере при спуске.
При этом особенно будет полезен вариант 4 - продольно сдвигающееся крыло, так как наличие твердотопливного двигателя может нарушить центровку космолета. А может и не нарушить, если заранее позаботиться о том, чтобы центр масс двухступенчатого космолета находился в районе стыка ступеней. Но центровку отдельно второй ступени он обязательно нарушит, поэтому надо предусмотреть на нем крыло и кили такой площади, чтобы полет второй ступени с твердотопливным ускорителем был бы продольно и поперечно устойчив.
В этом случае следует модифицировать вариант 7, а именно все пять горизонтальных (относительно условно сборочного положения космолета, или, что то же самое, относительно положения второй ступени при горизонтальной посадке на землю) аэродинамических поверхности имеют положительный угол атаки и создают подъемную силу.
Применение ускорителя имеет второй положительный эффект: так как после окончания его работы вторая ступень с математической точки зрения, когда масса Земли принимается точечной, выходит на орбиту, то дальнейший разгон можно осуществлять сравнительно медленно. Главное - успеть набрать скорость 7,9 км/с до входа в атмосферу. Допустим, осталось набрать 2 км/с за 15 минут, то есть с ускорением 2,2 м/с*с. Это означает, что двигатель второй ступени может быть довольно маленьким и легким, что уменьшает выводимую массу конструкции и увеличивает полезную нагрузку.
ВАРИАНТ 14. Двигатель второй ступени и двигатель ускорителя, если он есть, будут включаться на большой высоте и работать практически в вакууме, и поэтому могут иметь выходной диаметр сопла, равный диаметру фюзеляжа (если он круглый). И нос второй ступени, а также носовая часть ускорителя могут входить во впереди расположенное сопло без больших зазоров. Жесткость соединения при этом может обеспечиваться соединительными Х-образно расположенными (в поперечном сечении фюзеляжа) наружными сбрасываемыми лонжеронами.
Носовая часть ускорителя при этом может быть специально выполнена такой, чтобы повторять с зазором форму сопла двигателя второй ступени. Или наоборот - при достаточной прочности сопла - без зазоров, но с эластичной пористой прокладкой, приклеенной к соплу (при включении двигателя она сгорает). Из чего следует, что на второй ступени должен быть только один основной двигатель, расположенный по продольной оси фюзеляжа, и ракетный ускоритель тоже должен иметь такое сопло.
Тем не менее, между первой и второй ступенью, а также между ними и ракетным ускорителем могут потребоваться одноразовые сбрасываемые обтекатели. Причем, если обтекатели будут достаточно прочными, они могут выполнять и функцию соединительных лонжеронов.
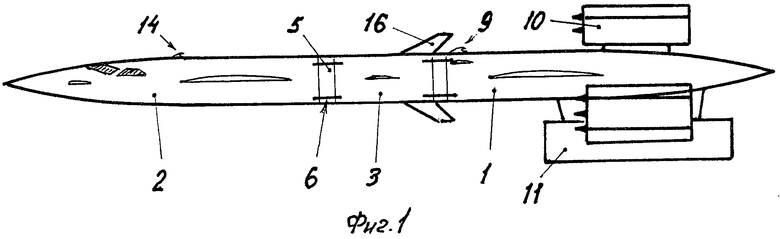
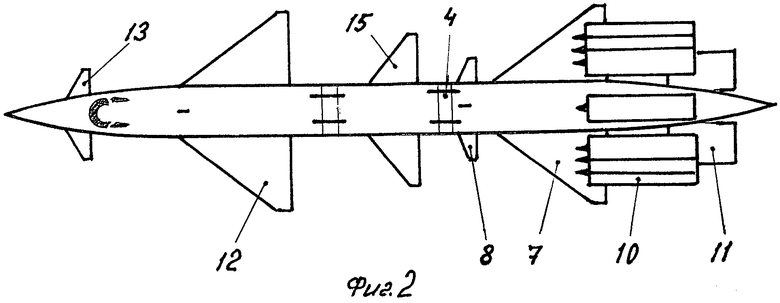
На прилагаемых фиг.1, 2, 3 показан трехступенчатый космолет в самой полной комплектации (на фиг.1 - в условно сборочном горизонтальном положении), состоящий из первой ступени 1, второй ступени 2 и ракетного ускорителя 3 между ними. Между ступенями и ускорителем имеются сбрасываемые обтекатели 4,5 и наружные лонжероны 6.
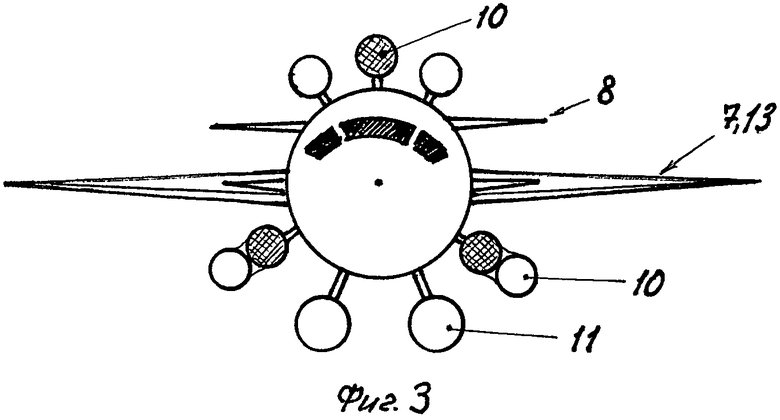
Первая ступень имеет крыло продольно изменяемого положения 7, ПГО 8, посадочный крюк-пилон 9, семь двухконтурных турбореактивных двигателей 10 и два прямоточных двигателя 11. Все двигатели расположены на пилонах за пределами пограничного слоя, при этом их пилоны и мотогондолы выполняют роль стабилизаторов, а если на пилонах сзади сделать отклоняемые поверхности, то и роль рулей. Вторая ступень имеет треугольное неподвижное крыло 12, ПГО 13, посадочный крюк для промежуточной посадки 14, а также расположенный внутри ступени жидкостный или твердотопливный ракетный двигатель (не показан) и шасси (показано на фиг.4). При этом нос первой ступени входит в реактивное сопло ракетного двигателя ускорителя, а нос ускорителя входит в сопло второй ступени.
Ракетный ускоритель 3 имеет крылья 15 и кили 16.
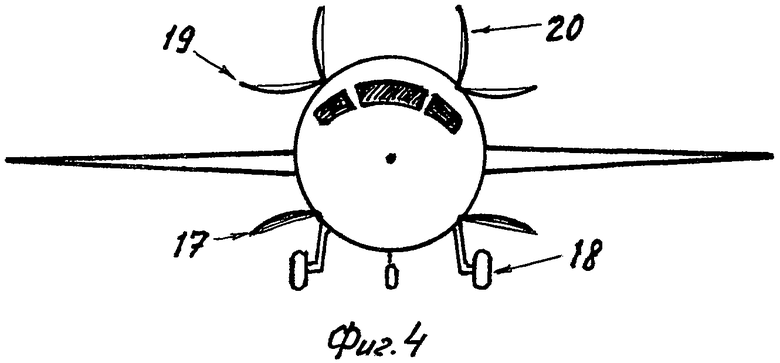
На фиг.4 показана вторая ступень вид спереди. Одновременно показаны девятый и десятый варианты, то есть створки нижнего грузового люка 17, служащие для выпуска шасси 18 и для создания подъемной силы, и створки верхнего грузового люка - передние створки 19, служащие для создания дополнительной подъемной силы и управления по крену и тангажу, и задние створки 20, служащие килями и рулями направления.
Работает система так: с помощью семи ДТРД 10 первой ступени 1 космолет взлетает со специального приспособления. Крыло 7 при этом находится в заднем положении (все направления даны относительно направления полета). Все пять аэродинамических поверхностей 7, 8, 12, 13, 15 имеют положительный угол атаки и создают в наклонной части траектории подъемную силу. Управляется система по тангажу путем перераспределения подъемной силы, в основном, на ПГО второй ступени 13 и на крыле 7 первой ступени (они максимально разнесены по длине системы), а также системой управления разнотягой двигателей. По крену управляется элевонами, «ножницами» ПГО или интерцепторами. По мере расходования топлива из первой ступени и увеличения высоты и скорости полета крыло 7 переводится во все более переднее положение, достигая максимально переднего положения на расчетной высоте и скорости. Достигнув потолка, крыло 7 быстро переводится в заднее положение, наружные соединительные лонжероны 6 отстреливаются, и первая ступень отделяется.
Первая ступень будет иметь достаточно тупую переднюю оконечность (острая ей не нужна), и поэтому быстро тормозится до дозвуковой скорости. Четыре двигателя из шести глушатся, а на трех двигателях, работающих на малых оборотах (на фиг.3 они заштрихованы), первая ступень следует к посадочному устройству. Или планирует с выключенными двигателями. В районе посадки первая ступень совершает кабрирование, удерживая ступень хвостом вниз с помощью тяги трех или всех турбореактивных двигателей, подводит крюк к цепи или тросу и повисает на нем.
После отделения первой ступени начинает работать ускоритель 3. Обтекатель 4 некоторое время остается на нем, но после увода первой ступени в сторону, сбрасывается. Окончив работу, наружные лонжероны отстреливаются и ускоритель отделяется.
Вторая ступень 2 включает ракетный двигатель и выходит в безвоздушное пространство. Сброс обтекателя 5 производится примерно так же, как и обтекателя 4, но чуть раньше (сброс его вместе с ускорителем опасен из-за потери ускорителем устойчивого полета и возможности соударения его с соплом двигателя второй ступени).
Выполнив программу, вторая ступень тормозится в атмосфере и совершает посадку на аэродром. Вторая ступень может совершить поперечный маневр с использованием атмосферы, чтобы учесть встречный, попутный или боковой ветер в районе аэродрома.
АЛГОРИТМ РАБОТЫ КОСМОЛЕТА. Если бы не было атмосферы, то выход любого аппарата на орбиту Земли целесообразно было осуществлять только разгоном по горизонтали (например, по проложенной по экватору железной дороге). Поэтому при преодолении плотных слоев атмосферы вступают в противоречие две тенденции - разгоняться только по горизонтали и как можно скорее выйти из плотных слоев атмосферы, затратив на это как можно меньше топлива. С учетом этого алгоритм работы космолета отличается от алгоритма и траектории ракеты и может выглядеть так:
1. Вертикальный старт с форсажем турбореактивных двигателей.
2. Разгон под углом 5-20 (оптимально около 10) градусов к вертикали до скорости, на которой становятся эффективными крылья (примерно 100 м/с).
3. Плавный поворот на траекторию под углом 30-60 (оптимально 45) градусов к вертикали и подъем до высоты, на которой тяговооруженность уменьшится до 1-1,3 (из-за уменьшения плотности воздуха).
4. На скорости эффективной работы прямоточных двигателей - включение их (ориентировочно 2М).
5. По мере уменьшения тяги постепенный переход на траекторию под углом 70-89 (оптимально 80) градусов к вертикали и набор высоты до 80-99% (оптимально 90%) потолка, соответствующего этому режиму.
6. Включение режима форсажа путем впрыска в форсажную камеру ДТРД и камеру сгорания ПВРД окислителя и соответствующего дополнительного количества топлива.
Этот способ форсажа путем подачи дополнительного к кислороду воздуха окислителя известен, однако он не имеет краткого названия. Предлагаю называть его «экстрафорсаж» от греческого «экстра», то есть «дополнительно». Не следует считать, что это всего лишь параллельная работа воздушнореактивного и ракетного двигателей. Как известно из закона сохранения импульса, для создания наибольшей тяги при той же затрате энергии выгодно отбрасывать как можно большее количество рабочего тела с как можно меньшей скоростью. В экстрафорсаже дополнительное тепло идет не только на нагрев самого топлива и окислителя, как в ракетном двигателе, но и на нагрев поступающего в двигатель воздуха, то есть на нагрев всего имеющегося рабочего тела.
Может показаться, что наличие окислителя резко увеличит массу первой ступени. Это не так: включаться этот режим будет на высоте 25-30 км и за 1-2 минуты будет поднимать космолет до 40 км, а так как плотность воздуха в этом интервале очень мала (1-2% от исходной), то и расход топлива и окислителя будет небольшим.
7. Набор высоты до 90-100% (оптимально 98%) потолка, соответствующего этому режиму. Все 100% потолка набирать не следует потому, что последние проценты набираются очень медленно, и это потребует значительного количества топлива, то есть увеличит стартовую массу или уменьшит выводимую нагрузку. Предположительно, на режиме экстрафорсажа космолет может достичь высоты 40 км и скорости 7-8 М (плотность воздуха на этой высоте примерно 1% от исходной, температура около -20 градусов C).
8. Отделение второй ступени вместе с ракетным ускорителем, если он есть. Переход на траекторию 70-89 (оптимально 80) градусов к вертикали.
9. По мере выхода из атмосферы переход на горизонтальную траекторию.
10. Отделение ракетного ускорителя, если он есть, и включение двигателя второй ступени.
11. Посадка первой ступени и, по окончании программы полета, второй ступени.
Все параметры, указанные интервалом, рассчитываются методом последовательных приближений конкретно к каждой выводимой нагрузке и корректируются по результатам предыдущих полетов.
Рекомендуемые топлива: для первой ступени - жидкий метан и криогенный 26% раствор озона в жидком кислороде, для второй ступени - криогенный 50% раствор ацетилена в этилене и тот же 26% раствор озона в кислороде, для ракетного ускорителя - динитрамид аммония, боргидрид бериллия, бериллий (на выходе из газов будет только водород, скорость звука в котором примерно в 4 раза больше, чем в обычных выхлопных газах РДТТ, что позволит облегчить сопло и повысить удельный импульс). Реакция в ракетном ускорителе выглядит так:
2Ве(ВН4)2+NH4N(NO2)2+2Ве=4ВеО+4BN+10Н2
Соотношение компонентов: боргидрида бериллия - 35,26% +-10%, динитрамида аммония - 56,52% +-10%, бериллия - 8,22% +-5%.
Если траектория взлета проходит над населенными местами, то можно заменить бериллий и его токсичные соединения на литий или алюминий и их соединения.
4LiBH4+NH4N(NO2)2+4Li=4Li2O+4BN+10Н2
Или:
4Al(ВН4)3+3NH4N(NO2)2+4Al=4Al2O3+12BN+30Н2
Возможна и реакция с полным или частичным окислением получившегося водорода.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКАЯ РАКЕТА /ВАРИАНТЫ/ И СПОСОБ ЕЕ ПОСАДКИ | 2014 |
|
RU2568630C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |
| МАЛОЗАМЕТНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2705416C2 |
| ШАССИ ДЛЯ ТРАНСПОРТНЫХ САМОЛЕТОВ /ВАРИАНТЫ/ | 2012 |
|
RU2592123C2 |
| ПЕРЕДНЯЯ СТОЙКА ШАССИ /ВАРИАНТЫ/ | 2012 |
|
RU2513347C1 |
| ДВУХСТУПЕНЧАТАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА /ВАРИАНТЫ/ | 2012 |
|
RU2529121C2 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |
| ВЕЛОСИПЕДНОЕ ШАССИ | 2012 |
|
RU2494011C1 |
| Штурмовик /варианты/ | 2016 |
|
RU2623638C1 |
Изобретение относится к ракетно-космической технике, а именно к космолётам. Космолёт содержит две ступени с крыльями, воздушно-реактивные двигатели (ВРД), центроплан, переднее горизонтальное оперение, крюк для вертикальной посадки, грузовой люк, блокировку отделения ступени, убирающиеся кили, ракетный ускоритель, сбрасываемые лонжероны и обтекатели. Ракетный ускоритель содержит в качестве компонентов топлива боргидрид бериллия, динитрамид аммония, бериллий. Космолёт запускают вертикально, разгоняют до скорости эффективности крыльев, поворачивают и поднимают на высоту уменьшения тяговооруженности, разгоняют до скорости эффективности прямоточных ВРД, включают режим форсажа, отделяют вторую ступень с ракетным ускорителем, переходят на горизонтальную траекторию, включают двигатели второй ступени, производят посадку первой и второй ступеней. Изобретение позволяет увеличить массу полезной нагрузки. 15 н. и 10 з.п. ф-лы, 4 ил.
1. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушнореактивные двигатели на первой ступени, отличающийся тем, что имеет на крыльях первой и/или второй ступеней элевоны, составляющие 30-60% от хорды крыла в данном сечении.
2. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушнореактивные двигатели на первой ступени, отличающийся тем, что первая ступень космолета имеет центроплан, вращающийся относительно поперечной оси космолета.
3. Космолет по п.2, отличающийся тем, что крыло имеет второй лонжерон или траверсу на главном лонжероне, которая закреплена на вспомогательном центроплане, имеющем возможность перемещаться по дуге в прорези фюзеляжа.
4. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушнореактивные двигатели на первой ступени, отличающийся тем, что на первой ступени имеет крыло, внешние части консолей или целиком консоли закреплены с возможностью отклонения вверх относительно оси, параллельной продольной оси.
5. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушнореактивные двигатели на первой ступени, отличающийся тем, что крыло первой и/или второй ступени закреплено на центроплане, закрепленном с возможностью продольного перемещения в фюзеляже.
6. Космолет по п.5, отличающийся тем, что центроплан представляет собой тележку, скользяще или на колесах закрепленную в фюзеляже в направляющих.
7. Космолет по п.5, отличающийся тем, что имеет блокировку, которая не допускает отделения ступени при нахождении крыла не в заднем положении и автоматически разделяет ступени при возврате крыла в заднее положение.
8. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что на первой ступени имеются прямоточные воздушно-реактивные двигатели, которые установлены ниже центра масс.
9. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что на первой и второй ступенях имеется переднее горизонтальное оперение, причем оперение первой ступени работает как «утка», когда центр масс находится позади него, как заднее, когда центр масс становится впереди него, и занимает положение с оптимальным углом атаки, когда центр масс совпадает с ним.
10. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что на первой и второй ступенях имеется переднее горизонтальное оперение, причем все крылья и ПГО имеют положительный угол атаки и создают подъемную силу.
11. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что первая и/или вторая ступень данного космолета имеет в передней части фюзеляжа убирающийся или неубирающийся крюк для вертикальной посадки ступени или всего космолета методом «хвостом вниз» на цепь или трос.
12. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что имеет грузовой люк на нижней поверхности фюзеляжа второй ступени, который одновременно служит для выпуска-уборки шасси.
13. Космолет по п.12, отличающийся тем, что имеет створки люка, раскрывающиеся на угол 150-210 градусов, причем раскрывшиеся створки служат дополнительными аэродинамическими поверхностями.
14. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что имеет грузовой люк на верхней части фюзеляжа второй ступени, причем люк имеет четыре продольные створки - по две слева и справа, передние две из которых открываются на угол до +-80 градусов к горизонтали и служат дополнительными несущими аэродинамическими поверхностями, а задние две открываются на угол до +-80 градусов к вертикали, имеют на задней части створок отклоняемые поверхности и служат килями и/или задними рулями высоты.
15. Космолет по п.14, отличающийся тем, что задняя часть задних створок состоит из нескольких продольных поверхностей, которые поочередно или в шахматном порядке заходят одна на другую и отклоняются синхронно.
16. Космолет по п.14, отличающийся тем, что задняя часть задних створок отклоняется влево и вправо относительно разных осей вращения, которые образуют три или более плоских шарнира, расположенные на штоках своих гидроцилиндров или электроталрепов, причем как минимум два гидроцилиндра или талрепа с одной стороны закреплены на створке жестко, и шарниры на их штоках образуют ось вращения, перемещающуюся продольно, а один или более гидроцилиндров или электроталрепов с другой стороны створки закреплены шарнирно, и шарнир/шарниры на их штоках образуют ось вращения, перемещающуюся продольно и поперечно.
17. Космолет по п.14 отличающийся тем, что задняя часть задних створок состоит из нескольких продольных поверхностей, которые имеют возможность поворачиваться относительно осей, проходящих или параллельных хорде дуги створки, причем боковые поверхности всех упомянутых поверхностей перпендикулярны хорде дуги створки.
18. Космолет по п.14, отличающийся тем, что задняя часть левой задней створки отклоняется только влево, а задняя часть правой задней створки отклоняется только вправо, причем относительно оси вращения, выходящей за пределы обшивки створки на выносных пилонах или не выходящей за ее пределы.
19. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что киль/кили второй ступени убирающиеся.
20. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что вторая ступень имеет два отсека для топлива, расположенные по обе стороны от грузового отсека.
21. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что имеет ракетный ускоритель, расположенный между первой и второй ступенью.
22. Космолет по п.21, отличающийся тем, что на ракетном ускорителе имеются крыло и кили такой площади, чтобы полет второй ступени с твердотопливным ускорителем был продольно и поперечно устойчив.
23. Космолет по п.21, отличающийся тем, что ракетный ускоритель имеет топливо со следующим соотношением компонентов: боргидрида бериллия - 35,26% +-10%, динитрамида аммония - 56,52% +-10%, бериллия - 8,22% +-5%.
24. Космолет, содержащий первую и вторую ступени с крыльями и имеющий воздушно-реактивные двигатели на первой ступени, отличающийся тем, что между первой и второй ступенью, а также между ними и ракетным ускорителем имеются Х-образно в поперечном сечении расположенные наружные сбрасываемые лонжероны и/или одноразовые сбрасываемые обтекатели.
25. Алгоритм работы космолета, отличающийся тем, что состоит из следующих этапов:
1) вертикальный старт с форсажем турбореактивных двигателей;
2) разгон под углом 5-20 градусов к вертикали до скорости, на которой становятся эффективными крылья;
3) плавный поворот на траекторию под углом 30-60 градусов к вертикали и подъем до высоты, на которой тяговооруженность уменьшится до 1-1,3;
4) на скорости эффективной работы прямоточных двигателей - включение их;
5) по мере уменьшения тяги постепенный переход на траекторию под углом 70-89 градусов к вертикали и набор высоты до 80-99% потолка, соответствующего этому режиму;
6) включение режима форсажа путем впрыска в форсажную камеру ДТРД и камеру сгорания ПВРД окислителя и соответствующего дополнительного количества топлива;
7) набор высоты до 90-100% потолка, соответствующего этому режиму;
8) отделение второй ступени вместе с ракетным ускорителем, если он есть, переход на траекторию 70-89 градусов к вертикали;
9) по мере выхода из атмосферы переход на горизонтальную траекторию;
10) отделение ракетного ускорителя, если он есть, и включение двигателя второй ступени;
11) посадка первой ступени и, по окончании программы полета, второй ступени.
| КОСМОЛЕТ МЕСТОНА И СИСТЕМА АВАРИЙНОГО СПАСЕНИЯ ЭКИПАЖА | 1992 |
|
RU2015080C1 |
| RU 96101439 A, 10.04.1998 | |||
| WO 2004092013 A2, 28.10.2004 | |||
| US 6290184 B1, 18.09.2001. | |||

