Предлагаемые способ и устройство относятся к контрольно-измерительной технике, предназначенной для контроля герметичности газонефтесодержащего оборудования и, более конкретно, к технике дистанционного определения места утечки жидкости или газа из магистрального трубопровода, находящегося в траншее под грунтом.
Известны способы утечки жидкости или газа из трубопроводов [авт. свид. СССР №934269, 1216551, 1283556, 1610347, 1657988, 1672105, 1679232, 1705709, 1733837, 1777017, 1778579, 1812386; патенты RU №2047783, 2135887, 2138037, 2231037; патенты США №4289019, 4570477, 5038614; патент Великобритании №1349129; патент Франции №2498325; патенты Японии №5938537, 6024900, 6322531; Трубопроводный транспорт жидкости и газа. М., 1993].
Из известных способов наиболее близким к предлагаемому является «Способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте» [патент RU №2231037], который и выбран в качестве прототипа.
Данный способ обеспечивает дистанционное определение места утечки жидкости или газа из заглубленного магистрального трубопровода. Сущность способа заключается в следующем: трассу трубопровода облетают на маловысотном летательном аппарате, например вертолете. При этом производят обзор трассы трубопровода радиолокаторами с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м для определения места его залегания. Одновременно сканируют трубопровод съюстированными тепловизионным и телевизионным датчиками. Осуществляют совместную цифровую обработку сигналов датчиков и радиолокаторов.
Однако возможности бортовой аппаратуры вертолета, а следовательно, и известного способа, используются не в полной мере.
Технической задачей изобретения является расширение функциональных возможностей способа путем определения высоты полета вертолета и местоположения источника радиоизлучений.
Поставленная задача решается тем, что способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, заключающийся, в соответствии с ближайшим аналогом, в обзоре трубопровода трассоискателем, в качестве которого используют четыре радиолокатора разных длин волн, путем облета на маловысотном летательном аппарате, одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов радиолокаторов, тепловизионного и телевизионного датчиков, при этом приемопередающие антенны четырех радиолокаторов размещают на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры, а о месте утечки жидкости или газа их трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком, о глубине залегания трубопровода судят по цвету его изображения на экране индикатора, отличается от ближайшего аналога тем, что формируют высокочастотное колебание, манипулируют его по фазе псевдослучайной последовательностью, усиливают сформированный сложный сигнал с фазой манипуляцией по мощности, излучают его в направлении поверхности Земли, принимают отраженный от поверхности Земли сигнал, пропускают его через блок регулируемой задержки, перемножают с зондирующим сложным сигналом с фазовой манипуляцией, выделяют низкокачественное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τз между зондирующим и отраженным сигналами и по ее значению определяют высоту полета вертолета, принимают сложные сигналы с фазовой манипуляцией на три антенны, одна из которых относится к измерительному каналу и располагается над втулкой винта вертолета, а две другие относятся к двум пеленгационным каналам и располагаются на концах двух лопастей несущего винта, сложный сигнал с фазовой манипуляцией каждого пеленгационного канала перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармонические напряжения на частоте вращения несущего винта вертолета, измеряют угловые координаты источника радиоизлучений и регистрируют их, сложный сигнал с фазовой манипуляцией измерительного канала перемножают с опорным напряжением, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и регистрируют его, низкочастотное напряжение одновременно перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармоническое напряжение и используют его в качестве опорного напряжения.
Поставленная задача решается тем, что устройство для определения места утечки жидкости или газа из трубопровода, находящегося в грунте, содержащее, в соответствии с ближайшим аналогом, синхронизатор, переключатель сектора обзора, генератор строб-импульсов, четырехцветный индикатор, тепловизионный датчик, телевизионный датчик, блок приема, цифровой обработки и регистрации и четыре радиолокатора, каждый из которых состоит из последовательно включенных передатчика, второй вход которого соединен с выходом синхронизатора, антенного переключателя, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередаточной антенной, приемника, второй вход которого соединен с выходом генератора строб-импульсов, и блока обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к индикатору, управляющий вход которого соединен с выходом синхронизатора, к выходу синхронизатора последовательно подключены тепловизионный датчик и блок приема, цифровой обработки и регистрации, второй вход которого через телевизионный датчик соединен с выходом синхронизатора, а третий, четвертый, пятый, шестой и седьмой входы соединены с выходами синхронизатора и антенных переключателей радиолокаторов соответственно, при этом приемопередающие антенны размещены на концах лопастей несущего винта вертолета соответственно, отличается от ближайшего аналога тем, что оно снабжено пятой приемопередаточной антенной, пятым антенным переключателем, пятым приемником, задающим генератором, генератором псевдослучайной последовательности, фазовым манипулятором, усилителем мощности, пятью перемножителями, двумя фильтрами нижней частоты, экстремальным регулятором, блоком регулируемой задержки, индикатором высоты, тремя узкополосными фильтрами, двумя фазометрами и опорным генератором, причем к выходу синхронизатора последовательно подключены задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом генератора псевдослучайной последовательности, усилитель мощности, пятый антенный переключатель, вход-выход которого связан с пятой приемопередаточной антенной, размещенной над втулкой несущего винта вертолета, пятый приемник, второй вход которого соединен с выходом генератора строб-импульсов, блок регулируемой задержки, первый перемножитель, второй вход которого соединен с выходом усилителя мощности, первый фильтр нижних частот и экстремальный регулятор, выход которого соединен с вторым входом блока регулируемой задержки, к второму выходу которого подключен индикатор высоты, к выходу пятого приемника последовательно подключены второй перемножитель, второй вход которого соединен с выходом третьего приемника, первый узкополосный фильтр и первый фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к восьмому входу блока приема, цифровой обработки и регистрации, к выходу пятого приемника последовательно подключены третий перемножитель, второй вход которого соединен с выходом четвертого приемника, второй узкополосный фильтр и второй фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к девятому входу блока приема, цифровой обработки и регистрации, к выходу пятого приемника последовательно подключены четвертый перемножитель, второй вход которого соединен с выходом второго фильтра нижних частот, третий узкополосный фильтр, пятый перемножитель, второй вход которого соединен с выходом пятого приемника, и второй фильтр нижних частот, выход которого подключен к десятому входу блока приема, цифровой обработки и регистрации, пятая приемопередающая антенна размещена над втулкой несущего винта вертолета, опорный генератор, первая, вторая, третья и четвертая приемопередающие антенны кинематически связаны с двигателем.
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1. Геометрическая схема расположения приемопередающих антенн на вертолете изображена на фиг.2. Временные диаграммы, поясняющие работу устройства, показаны на фиг.3.
Устройство (фиг.1) содержит синхронизатор 1, переключатель 7 сектора обзора, генератор 8 строб-импульсов, четырехцветный индикатор 9, тепловизионный датчик 10, телевизионный датчик 11, блок 12 приема, цифровой обработки и регистрации и четыре радиолокатора, каждый из которых состоит из последовательно включенных передатчика 2.i, второй вход которого соединен с выходом синхронизатора 1, антенного переключателя 3.i, второй вход которого соединен с выходом переключателя 7 сектора обзора, приемника 5.i, второй вход которого соединен с выходом генератора 8 строб-импульсов, и блока 6.i обработки, выход которого соединен с соответствующим входом индикатора 9, управляющий вход которого соединен с выходом синхронизатора 1 (i=1, 2, 3, 4). К выходу синхронизатора 1 последовательно подключены тепловизионный датчик 10 и блок 12 приема, цифровой обработки и регистрации, второй вход которого через телевизионный датчик 11 соединен с выходом синхронизатора 1, а третий, четвертый, пятый, шестой и седьмой входы соединены с выходами синхронизатора 1, первого 3.1, второго 3.2, третьего 3.3 и четвертого 3.4 антенных переключателей. К выходу синхронизатора 1 последовательно подключены задающий генератор 13, фазовый манипулятор 15, второй вход которого соединен с выходом генератора 14 псевдослучайной последовательности, усилитель 16 мощности, пятый антенный переключатель 3.5, второй вход которого соединен с выходом переключателя 7 сектора обзора, а вход-выход связан с пятой приемопередаточной антенной 4.5, пятый приемник 5.5, второй вход которого соединен с выходом генератора 8 строб-импульсов, блок 21 регулируемой задержки, первый перемножитель 18, второй вход которого соединен с выходом усилителя 16 мощности, первый фильтр 19 нижних частот и экстремальный регулятор 20, выход которого соединен с вторым входом блока 21 регулируемой задержки, к второму выходу которого подключен индикатор 22 высоты.
К выходу пятого приемника 5.5 последовательно подключены второй перемножитель 23, второй вход которого соединен с выходом третьего приемника 5.3, первый узкополосный фильтр 25 и первый фазометр 27, второй вход которого соединен с выходом опорного генератора 30, а выход подключен к восьмому входу блока 12 приема, цифровой обработки и регистрации. К выходу пятого приемника 5.5 последовательно подключены третий перемножитель 24, второй вход которого соединен с выходом четвертого приемника 5.4, второй узкополосный фильтр 26 и второй фазометр 28, второй вход которого соединен с выходом опорного генератора 30, а выход подключен к девятому входу блока 12 приема, цифровой обработки и регистрации. К выходу пятого приемника 5.5 последовательно подключены четвертый перемножитель 32, второй вход которого соединен с выходом второго фильтра 35 нижних частот, третий узкополосный фильтр 33, пятый перемножитель 34, второй вход которого соединен с выходом пятого приемника 5.5, и второй фильтр 35 нижних частот, выход которого подключен к десятому входу блока 12 приема, цифровой обработки и регистрации. Опорный генератор 30, первая 4.1, вторая 4.2, третья 4.3 и четвертая 4.4 приемопередающие антенны кинематически связаны с двигателем 29. Перемножитель 18, фильтр 19 нижних частот, экстремальный регулятор 20, блок 21 регулируемой задержки и индикатор 22 высоты образуют корректор 17. Перемножители 32 и 34, узкополосный фильтр 33 и фильтр 35 нижних частот образуют демодулятор 31 фазоманипулированного сигнала.
Предлагаемый способ осуществляется следующим образом.
На маловысотном аппарате, например вертолете, размещаются пять радиолокаторов, тепловизионное и телевизионное устройства и блок цифровой фильтрации сигналов тепловизионного, телевизионного и радиолокационных устройств.
При облете трубопровода на маловысотном летательном аппарате производятся:
- обзор трубопровода четырьмя радиолокаторами λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м для определения места залегания трубопровода (трассы трубопровода);
- точное определение высоты полета вертолета;
- синхронизированное по времени наблюдение пространства над трассой трубопровода съюстированными тепловизионным и телевизионным устройствами;
- совместная цифровая фильтрация сигналов радиолокационного, тепловизионного и телевизионного устройств, которая позволяет определить профиль залегания трубопровода и выделить тепловые пятна на грунте по трассе трубопровода в месте утечки из трубопровода;
- определение местоположения источника радиоизлучений (ИРИ).
Основой предлагаемого способа является принцип совместной логической обработки сигналов съюстированных и синхронно работающих информационных тепловизионного, телевизионного и радиолокационного каналов.
Радиолокационный канал обеспечивает точное определение места залегания трубопровода (трассы трубопровода) и высоту полета h вертолета.
Вырабатываемые в синхронизаторе 1 импульсы запускают четыре передатчика 2.1-2.4 и задающий генератор 13, управляют четырьмя блоками 6.1-6.4 обработки сигналов. Импульсы синхронизатора 1 также управляют работой генератора 8 строб-импульсов, цветного индикатора 9, тепловизионного датчика 10, телевизионного датчика 11 и блока 12 приема, цифровой обработки и регистрации. Длительность и продолжение во времени определяют положение и протяженность наблюдаемого элемента земной поверхности по дальности. Эти импульсы и подаются на блоки обработки.
Каждый передатчик работает на своей длине волны, которая определяет глубину проникновения электромагнитного излучения на подстилающую поверхность.
Зондирующие импульсы с передатчиков 2.1-2.4 через антенные переключатели 3.1-3.4 поступают на свои антенны 4.1-4.4, каждая из которых расположена на конце лопасти несущего винта вертолета (фиг.2).
Каждая антенна, расположенная на конце вращающейся лопасти, подключается к своему передатчику и приемнику только в момент прохождения определенного заранее установленного сектора обзора. Это осуществляется с помощью переключателя 7 сектора обзора, который представляет собой электрический контакт, выполненный в виде четырех щеток, расположенных под соответствующими лопастями, перемещающихся в процессе вращения по неподвижному токопроводящему сегменту, который в свою очередь может устанавливаться в фиксированном положении вокруг оси винта. Каждый передатчик и приемник подключается к антенне только в период прохождения соответствующей щетки по сегменту. Положение сегмента определяет положение сектора обзора в пространстве.
С антенн 4.1-4.4 сигналы излучаются в направлении подстилающей поверхности. Отраженные от трубопровода сигналы принимаются антеннами 4.1-4.4 и через антенные переключатели 3.1-3.4 подаются на приемники 5.1-5.4, а затем на блоки 6.1-6.4 обработки, в которых осуществляется обработка принятых сигналов по алгоритму синтезирования апертур. В этих же блоках усиливается эффект изменения дальности от антенны до трубопровода, вызванный перемещением антенн по окружности в процессе синтезирования. В блоках 6.1-6.4 обрабатываются сигналы, принятые только с определенного участка дальности, положение и протяженность которого определяется стробирующим импульсом, подаваемым с генератора 7. С блоков 6.1-6.4 обработки сигналы поступают на индикатор 9 с цветным изображением, причем сигналы с каждого блока обработки соответствуют изображению в определенном цвете.
Применение четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м с синтезированной апертурой позволяет обнаружить и определить координаты трубопровода, расположенного под подстилающей поверхностью Земли, с высокой угловой разрешающей способностью. При этом одновременно по цвету изображения можно судить о глубине расположения трубопровода под поверхностью Земли.
Тепловизионный канал позволяет фиксировать прямой физический признак утечки газа из заглубленного газопровода в виде локального понижения температуры (отрицательного теплового контраста на поверхности покрытия газопровода в районе течи) вследствие проявления дроссельного эффекта при истечении газа из газопровода. При этом возможные поверхностные тепловые контрасты в районе течи, по имеющимся экспериментальным и расчетным данным, составляют до 8-10°C, что существенно превышает пороговые характеристики контрастной чувствительности тепловизионных приборов (0,5-1,0°C) и, соответственно, могут быть выявлены измерения. Однако эффективное выделение места течи по этому прямому физическому признаку затруднено вследствие наличия естественной неоднородности температурного поля.
В районе залегания трубопровода значения случайных температурных контрастов, вызванных рядом факторов: характер покрытия и структура почвы, время суток, года, метеоусловия, могут быть соизмеримы или даже превышать значения идентифицируемых локальных температурных контрастов в районе течи. Соответственно, для повышения надежности селекции места течи предлагается использовать информацию дополнительных каналов: радиолокационного и телевизионного, позволяющих выделить косвенные признаки, сочетания которых с измерением прямого признака (отрицательного теплового контраста) существенно снижает вероятность ошибочной идентификации (ложной тревоги).
Так, радиолокационный канал, выделяя геометрическое расположение металлического трубопровода на местности по контрастам радиолокационных сигналов на четырех частотах, формирует тем самым косвенный логический признак возможного расположения места течи, а именно только в районе расположения трубопровода.
Телевизионный канал, выделяя поле контрастов, первопричиной которых является наличие внешнего источника, подсветки (Солнца), также позволяет формировать косвенные логические признаки течи, т.е. внутреннего, не связанного с внешней подсветкой, источника отрицательного теплового контраста, за счет совместной оценки размеров фактуры знака контрастных образований телевизионного и тепловизионного кадров с учетом условий подсветки (освещенность, метеоусловия и др.).
Таким образом, совместный логический анализ (фильтрация) сигналов многоканальной системы, измеряющей прямой признак (тепловой контраст) и косвенные признаки (контрасты отраженного излучения внешних источников подсветки видимого и радиодиапазонов) позволяет существенно повысить эффективность обнаружения течи по сравнению с одноканальным способом, например тепловизионного или спектрального анализа поглощения газовых продуктов на местности.
Использование четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м в предлагаемом способе вызвано необходимостью, с одной стороны, обеспечения возможности получения доступных для измерения отраженных сигналов от трубопровода, заглубленного в траншее на 1,5-2,0 м, с другой, локализации расположения трубопровода по результатам измерений с определенными ошибками (таблицы 1, 2), для большей достоверности и точности выделения косвенного признака.
Анализ возможности использования предлагаемого способа на существующих вертолетах типа МИ-6, МИ-8, МИ-24, МИ-26 с длиной лопасти 20 м, числом оборотов винта 200 об/мин, позволяет получить следующие значения угловой разрешающей способности на разных глубинах, соответствующих длинам рабочих волн, значения которой при эффективной длине синтезированной апертуры 20 м приведены в таблице 1.
Для сравнения в таблице 2 приведены значения угловой разрешающей способности при различных длинах волн, которые можно обеспечить без синтезирования при ширине лопасти d=600 мм (α=λ/d).
Совместное рассмотрение таблиц 1 и 2 позволяет сделать вывод о том, что предлагаемый радиолокационный канал позволяет повысить угловую разрешающую способность при тех же длинах волн приблизительно в 100 раз.
Оценка показала, что использование более коротковолнового радиоизлучения не обеспечивает локации трубопровода при требуемых заглублениях (1,5-2,0 м). С другой стороны, локация более длинноволновым диапазоном (десятки метров и более), обеспечивая прохождение сигнала на требуемую глубину залегания, имеет неудовлетворительные показатели по точности пеленгации сигналов (в пределах десятков градусов).
Также неудовлетворительным является для предлагаемого способ оперативного контроля течи посредством, например, облета вертолетом и использования известного метода локализации металлических трубопроводов по искажениям геомагнитного поля (магнитометрический метод). При допустимых из условий безопасности высоких высотах полета не менее 50-100 м, наличии значительной помеховой металлической массы в зоне измерения (корпус вертолета) выделение искажений геомагнитного поля, вызванных наличием массы трубопровода, аппаратурно затруднено. При этом точность пеленгации магнитометрическим методом не превосходит 20-30°, что существенно снижает ценность измеряемого косвенного признака.
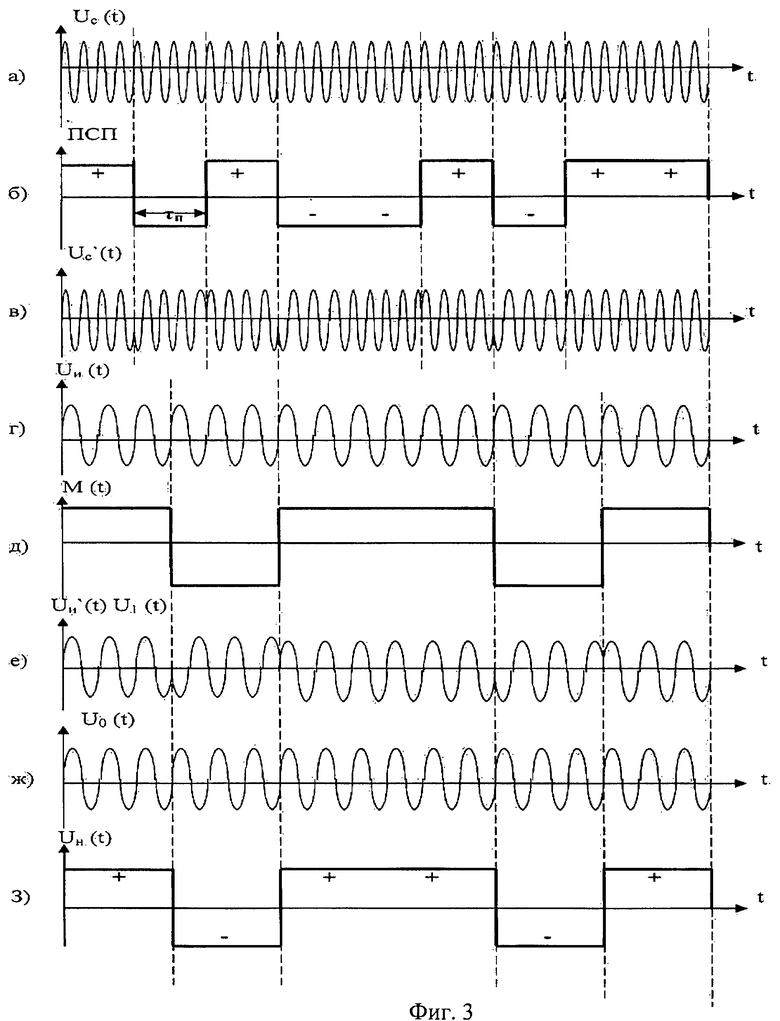
Для измерения высоты полета h вертолета импульсом синхронизатора 1 включается задающий генератор 13, который формирует высокочастотное колебание (фиг.3, а)
Uc(t)=Uccos(ωct+φс), 0≤t≤Tc,
где Uc, ωс, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на первый вход фазового манипулятора 15. На второй вход последнего подается псевдослучайная последовательность (ПСП) максимальной длительности с выхода генератора 14, который представляет собой регистр сдвига, охваченный логической обратной связью. Обратная связь осуществляется путем сложения по модулю двух выходных напряжений двух или более каскадов и подачи результирующего напряжения на вход первого каскада. Период повторения (длительность) такой кодовой последовательности
m=2n-1,
где n - число каскадов регистра сдвига.
На выходе фазового манипулятора 15 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.3, в)
Uc′(t)=Uccos[ωct+φк(t)+φc], 0≤t≤Tc,
где φк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с ПСП (фиг.3, б), причем φк1(t)=const при kτп<t<(k+1)τп и может изменятся скачком при t=kτп, т.е. на границах между элементарными посылками (k=1, 2, …, N);
τп, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Тс=Nτп).
Этот сигнал после усиления в усилителе мощности 16 через антенный переключатель 3.5 поступает в приемопередаточную антенну 4.5, излучается ею в направлении поверхности Земли в качестве зондирующего сигнала.
Отраженный от поверхности Земли ФМн-сигнал
Uот(t)=Uотcos[ωc(t-τз)+φк(t-τз)+φот], 0≤t≤Tc,
улавливается антенной 4.5 и через приемник 5.5 поступает на вход коррелятора 17, состоящего из перемножителя 18, фильтра 19 нижних частот, экстремального регулятора 20, блока 21 регулируемой задержки и индикатора 22 высоты. Отраженный ФМн-сигнал Uот(t) через блок 21 регулируемой задержки поступает на первый вход перемножителя 18, на второй вход которого подается зондирующий ФМн-сигнал Uc′(t) с выхода усилителя 16 мощности. Полученное на выходе перемножителя 18 напряжение пропускается через фильтр 19 нижних частот, на выходе которого формируется корреляционная функция R(τ). Экстремальный регулятор 20, предназначенный для поддержания максимального значения корреляционной функции R(τ), подключенный к выходу фильтра 19 нижних частот, воздействует на управляющий вход блока 21 регулируемой задержки и поддерживает вводимую им задержку τ равной τз (τ=τз), что соответствует максимальному значению корреляционной функции R(τ). Индикатор 22 высоты, завязанный со шкалой блока 21 регулируемой задержки, позволяет непосредственно считывать измеренное значение высоты полета вертолета
h=(сτз)/2,
где c - скорость распространение радиоволн;
τз - время запаздывания отраженного сигнала относительно зондирующего сигнала.
Описанная выше работа устройства соответствует режиму подповерхностного зондирования и определения высоты полета вертолета.
Бортовая аппаратура вертолета используется и для обнаружения и определения местоположения источников радиоизлучений (ИРИ). В качестве последних могут быть радиоизлучения источников экологического и стихийного бедствий, радиоизлучения потерпевших бедствие, радиоизлучения специальных машин, перевозящих в пределах населенных пунктов и отдельных регионов денежные средства, материальные ценности и опасные грузы (например, горючее, взрывчатые вещества и т.п.), радиоизлучения угнанных транспортных средств и другие.
Источник радиоизлучений формирует, например, сложный сигнал с фазовой манипуляцией путем манипуляции по фазе высокочастотного колебания (фиг.3, г)
Uн(t)=Uнcos(ωнt+φн), 0≤t≤Tн,
модулирующим кодом M(t) (фиг.3, д)
Uн'(t)=Uнcos[ωнt+φкн(t)+φн], 0≤t≤Tн,
где φкн(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t).
При этом модулирующий код M(t) является идентификационным номером источника радиоизлучения, т.е. содержит все необходимые сведения о нем.
Сформированный ФМн-сигнал Uн′(t) принимается антеннами 4.5, 4.3 и 4.4 вертолета:
U1(t)=U1cos[(ωн±Δω)t+φкн(t)+φн],
U2(t)=U2cos[(ωн±Δω)t+φкн(t)+φн+2π(R/λ)cos(Ω-α)],
U3(t)=U3cos[(ωн±Δω)t+φкн(t)+φн+2π(R/λ)cos(Ω-β)], 0≤t≤Tкн,
где ±Δω - нестабильность несущей частоты сигнала, обусловленная эффектом Доплера и другими дестабилизирующими факторами;
R - радиус окружности, на которой размещены антенны 4.3 и 4.4;
Ω=2πR - скорость вращения антенн 4.3 и 4.4 вокруг антенны 4.5 (скорость вращения винта вертолета);
α, β - азимут и угол места ИРН, которые через антенные переключатели 3.5, 3.3, 3.4 и приемники 5.5, 5.3, 5.4 поступают на два входа перемножителей 23 и 24. На выходе последних образуются напряжения:
U4(t)=U4cos[2π(R/λ)cos(Ω-α)],
U5(t)=U5cos[2n(R/λ)cos(Ω-β)], 0≤t≤Tн,
где U4=½U1U2; U5=½U1U3,
которые выделяются узкополосными фильтрами 25 и 26 и поступают на первые входы фазометров 27 и 28 соответственно, на вторые входы которых подается напряжение опорного генератора 30, кинематически связанного с двигателем вертолета
U8(t)=U8cosΩt.
Фазометры 27 и 28 обеспечивают измерение угловых координат α и β, которые поступают на соответствующие входы блока 12 и регистрируются им.
Измеренные высота полета h вертолета и угловые координаты α и β обеспечивают определение местоположения ИРИ.
Сложный ФМн-сигнал U1(t) (фиг.3, е) с выхода приемника 5.5 одновременно поступает на первые входы перемножителей 32 и 34. На второй вход перемножителя 34 поступает опорное напряжение
U0(t)=U0cos[(ωн±Δω)t+φн], 0≤t≤Tн,
с выхода узкополосного фильтра 33.
На выходе перемножителя 34 образуется напряжение
U6(t)=Uнcosφкн(t)+Uнcos[2(ωн±Δω)t+φкн(t)+2φн],
где Uн=½U1U0.
Фильтром 35 нижних частот выделяется низкочастотное напряжение (фиг.3, з)
Uн(t)=Uнcosφкн(t), 0≤t≤Tн,
пропорциональное модулирующему коду M(t).
Это напряжение поступает на соответствующий вход блок 12 приема, цифровой обработки и регистрации, где и фиксируется.
Перемножители 32 и 34, узкополосный фильтр 33 и фильтр 35 нижних частот образуют демодулятор ФМн-сигналов, который выделяет необходимое для синхронного детектирования опорное напряжение непосредственно из самого принимаемого ФМн-сигнала и свободы от явления «обратной работы», которое присуще всем известным демодуляторам ФМн-сигналов.
Предлагаемый способ обеспечивает повышение точности определения трассы залегания магистрального трубопровода. Это достигается использованием радиолокационного канала из четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м, приемопередающие антенны которых размещены на концах лопастей несущего винта вертолета.
Кроме того, радиолокационный канал с синтезированной апертурой и антеннами, расположенными на концах вращающихся лопастей несущего винта и работающих на разных частотах, позволяет с большей достоверностью и точностью выделять косвенный признак, необходимый для обнаружения местоположения утечки жидкости или газа из трубопровода, находящегося в грунте. Это достигается совместной логической обработкой сигналов съюстированных и синхронно работающих информационных тепловизионного, телевизионного и радиолокационного каналов.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами и другими техническими решениями аналогичного назначения позволяют не только определять утечки жидкости или газа из заглубленных магистральных трубопроводов, но и определять высоту полета вертолета, местоположение источников радиоизлучений и их идентификационный номер. Это достигается измерением высоты полета h вертолета, угловых координат α и β источников радиоизлучений и синхронным детектированием принимаемых ФМн-сигналов. Причем для синхронного детектирования принимаемых ФМн-сигналов используется универсальный демодулятор, свободный от явления «обратной работы», которое присуще всем известным демодуляторам ФМн-сигналов.
Кроме того, предлагаемые способ и устройство могут применяться для решения широкого круга задач, таких как медико-эвакуационные операции, спасательные работы при ликвидации аварий, поиск потерпевших бедствие, противопожарное патрулирование, контроль автострад с целью пеленгации угнанных транспортных средств, контроль за маршрутом следования специальных машин, перевозящих денежные средства, материальные ценности и опасные грузы, определение местоположения источников экологического и стихийного бедствий. Это возможно благодаря преимуществам вертолетов по сравнению с самолетами и другими летательными аппаратами взлетать и садиться на необорудованные и ограниченные по размерам площадки.
Тем самым функциональные возможности известного способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2628872C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2001 |
|
RU2207588C2 |
| Способ определения местоположения и размеров нефтяного пятна при аварийной утечке нефти | 2020 |
|
RU2735804C1 |

Изобретение относится к контрольно-измерительной технике и предназначено для дистанционного определения места утечки жидкости или газа из магистрального трубопровода, находящегося в траншее под грунтом. Техническим результатом изобретения является повышение эффективности определения места течи, что обеспечивается за счет того, что при определении места утечки жидкости или газа из трубопровода, находящегося в грунте, осуществляют обзор трубопровода трассоискателем, в качестве которого используют четыре радиолокатора разных длин волн, путем облета на маловысотном летательном аппарате, при одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов радиолокаторов, тепловизионного и телевизионного датчиков, при этом приемопередающие антенны четырех радиолокаторов размещают на концах лопастей несущего винта вертолета, а принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры. О месте утечки жидкости или газа из трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком, о глубине залегания трубопровода судят по цвету его изображения на экране индикатора, При этом согласно изобретению формируют высокочастотное колебание, манипулируют его по фазе псевдослучайной последовательностью, усиливают сформированный сложный сигнал с фазой манипуляцией по мощности, излучают его в направлении поверхности Земли, принимают отраженный от поверхности Земли сигнал, пропускают его через блок регулируемой задержки, перемножают с зондирующим сложным сигналом с фазовой манипуляцией, выделяют низкокачественное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τз между зондирующим и отраженным сигналами и по ее значению определяют высоту полета вертолета. Причем принимают сложные сигналы с фазовой манипуляцией на три антенны, одна из которых относится к измерительному каналу и располагается над втулкой винта вертолета, а две другие относятся к двум пеленгационным каналам и располагаются на концах двух лопастей несущего винта, сложный сигнал с фазовой манипуляцией каждого пеленгационного канала перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармонические напряжения на частоте вращения несущего винта вертолета, измеряют угловые координаты источника радиоизлучений и регистрируют их, сложный сигнал с фазовой манипуляцией измерительного канала перемножают с опорным напряжением, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и регистрируют его, низкочастотное напряжение одновременно перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармоническое напряжение и используют его в качестве опорного напряжения. 2 н.п. ф-лы, 3 ил., 2 табл.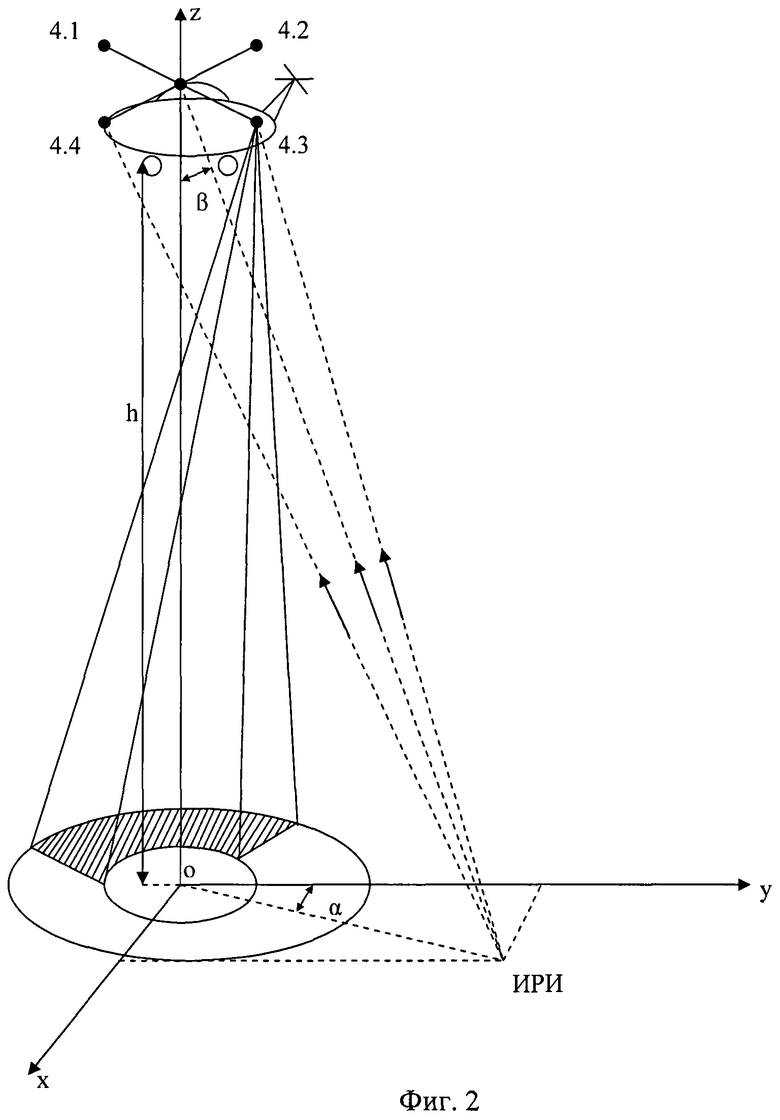
1. Способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, заключающийся в обзоре трубопровода трассоискателем, в качестве которого используют четыре радиолокатора разных длин волн, путем облета на маловысотном летательном аппарате, одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов радиолокаторов тепловизионного и телевизионного датчиков, при этом приемопередающие антенны четырех радиолокаторов размещают на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры, а о месте утечки жидкости или газа из трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком, о глубине залегания трубопровода судят по цвету его изображения на экране индикатора, отличающийся тем, что формируют высокочастотное колебание, манипулируют его по фазе псевдослучайной последовательностью, усиливают сформированный сложный сигнал с фазой манипуляцией по мощности, излучают его в направлении поверхности Земли, принимают отраженный от поверхности Земли сигнал, пропускают его через блок регулируемой задержки, перемножают с зондирующим сложным сигналом с фазовой манипуляцией, выделяют низкокачественное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τз между зондирующим и отраженным сигналами и по ее значению определяют высоту полета вертолета, принимают сложные сигналы с фазовой манипуляцией на три антенны, одна из которых относится к измерительному каналу и располагается над втулкой винта вертолета, а две другие относятся к двум пеленгационным каналам и располагаются на концах двух лопастей несущего винта, сложный сигнал с фазовой манипуляцией каждого пеленгационного канала перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармонические напряжения на частоте вращения несущего винта вертолета, измеряют угловые координаты источника радиоизлучений и регистрируют их, сложный сигнал с фазовой манипуляцией измерительного канала перемножают с опорным напряжением, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и регистрируют его, низкочастотное напряжение одновременно перемножают со сложным сигналом с фазовой манипуляцией измерительного канала, выделяют гармоническое напряжение и используют его в качестве опорного напряжения.
2. Устройство для определения места утечки жидкости или газа из трубопровода, находящегося в грунте, содержащее синхронизатор, переключатель сектора обзора, генератор строб-импульсов, черырехцветный индикатор, тепловизионный датчик, телевизионный датчик, блок приема, цифровой обработки и регистрации и четыре радиолокатора, каждый из которых состоит из последовательно включенных передатчика, второй вход которого соединен с выходом синхронизатора, антенного переключателя, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередаточной антенной, приемника, второй вход которого соединен с выходом генератора строб-импульсов, и блока обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к индикатору, управляющий вход которого соединен с выходом синхронизатора, к выходу синхронизатора последовательно подключены тепловизионный датчик и блок приема, цифровой обработки и регистрации, второй вход которого через телевизионный датчик соединен с выходом синхронизатора, а третий, четвертый, пятый, шестой и седьмой входы соединены с выходами синхронизатора и антенных переключателей радиолокаторов соответственно, при этом приемопередающие антенны размещены на концах лопастей несущего винта вертолета соответственно, отличающееся тем, что оно снабжено пятой приемопередаточной антенной, пятым антенным переключателем, пятым приемником, задающим генератором, генератором псевдослучайной последовательности, фазовым манипулятором, усилителем мощности, пятью перемножителями, двумя фильтрами нижних частот экстремальным регулятором, блоком регулируемой задержки, индикатором высоты, тремя узкополосными фильтрами, двумя фазометрами и опорным генератором, причем к выходу синхронизатора последовательно подключены задающий генератор фазовый манипулятор, второй вход которого соединен с выходом генератора псевдослучайной последовательности, усилитель мощности, пятый антенный переключатель, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с пятой приемопередаточной антенной, размещенной над втулкой несущего винта вертолета, пятый приемник, второй вход которого соединен с выходом генератора строб-импульсов, блок регулируемой задержки, первый перемножитель, второй вход которого соединен с выходом усилителя мощности, первый фильтр нижних частот и экстремальный регулятор, выход которого соединен с вторым входом блока регулируемой задержки, к второму выходу которого подключен индикатор высоты, к выходу пятого приемника последовательно подключены второй перемножитель, второй вход которого соединен с выходом третьего приемника, первый узкополосный фильтр и первый фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к восьмому входу блока приема, цифровой обработки и регистрации, к выходу пятого приемника последовательно подключены третий перемножитель, второй вход которого соединен с выходом четвертого приемника, второй узкополосный фильтр и второй фазометр, второй вход которого соединен с выходом опорного генератора, а выход подключен к девятому входу блока приема, цифровой обработки и регистрации, к выходу пятого приемника последовательно подключены четвертый перемножитель, второй вход которого соединен с выходом второго фильтра нижних частот, третий узкополосный фильтр, пятый перемножитель, второй вход которого соединен с выходом пятого приемника, и второй фильтр нижних частот, выход которого подключен к десятому входу блока приема, цифровой обработки и регистрации, пятая приемопередающая антенна размещена над втулкой несущего винта вертолета, опорный генератор, первая, вторая, третья и четвертая приемопередающие антенны кинематически связаны с двигателем.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 2002 |
|
RU2231037C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТА РАЗРЫВА ТРУБОПРОВОДА | 2002 |
|
RU2230978C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА (ВАРИАНТЫ) | 2008 |
|
RU2392537C1 |
| MX PA05014233 А, 03.12.2007 | |||
| Устройство для перемещения пульверизатора, применяемого в производстве триплекса | 1935 |
|
SU52053A1 |

