Предлагаемые способ и устройство относятся к контрольно-измерительной технике, предназначенной для контроля герметичности газонефтесодержащего оборудования и, более конкретно, к технике дистанционного определения места утечки жидкости или газа магистрального трубопровода, находящегося в траншее под грунтом.
Известны способы определения места утечки жидкости или газа из трубопроводов (а.с. СССР №380.909, 411.268, 642.575, 934.269, 1.216.551, 1.705.709, 1.733.837, 1.777.014, 1.777.597, 1.812.386; патенты РФ №2.047.831, 2.135.887, 2.138.037, 2.231.037; патенты США №4.289.019, 4.570.477, 5.038.614; патент Великобритании №1.349.129; патент Франции №2.498.325; патенты Японии №59-38.537, 60-24.900, 63-22.531; Трубопроводный транспорт жидкости и газа. - М., 1993 и другие. Кармазинов Ф.В., Заренков Д.В., Дикарев В.Н., Койнаш Б.В. Вода, нефть, газ и трубы в нашей жизни. - СПб., 2005 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте» (патент РФ №2.231.037, G01M 3/22, 2002), который и выбран в качестве прототипа.
Известный способ заключается в обзоре трубопровода трассоискателем путем облета на вертолете, одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов локатора, тепловизионного и телевизионного датчиков, при этом в качестве трассоискателя используют четыре локатора различных длин волн, приемопередающие антенны четырех локаторов размещают на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры, а о месте утечки жидкости или газа из трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком. Причем о глубине залегания трубопровода судят по цвету его изображения на экране индикатора.
Однако известный способ не обеспечивает высокой точности определения места утечки жидкости или газа из трубопровода, находящегося в грунте.
Технической задачей изобретения является повышение точности определения места утечки жидкости или газа путем формирования узкой диаграммы направленности приемных антенн за счет синтезирования их апертуры.
Поставленная задача решается тем, что способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, заключающийся в соответствии с ближайшим аналогом в обзоре трубопровода трассоискателем путем облета на вертолете, одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов локатора, тепловизионного и телевизионного датчиков, при этом в качестве трассоискателя используют дополнительные три локатора разных длин волн, приемопередающие антенны четырех локаторов размещают на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры, а о месте утечки жидкости или газа из трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком, а о глубине залегания трубопровода судят по цвету его изображения на экране индикатора, отличается от ближайшего аналога тем, что вращение лопастей несущего винта используют для формирования синтезированной апертуры дуговой формы для чего выходное напряжение блока приема пропускают через n-отводную линию задержки, расположенную на окружности, суммируют их и выходное напряжение блока приема, суммарное напряжение обрабатывают по алгоритму синтезирования апертуры дуговой формы и регистрируют его.
Поставленная задача решается тем, что устройство определения места утечки жидкости или газа из трубопровода, находящегося в грунте, содержащее в соответствии с ближайшим аналогом синхронизатор, четырехцветный индикатор, вход управления которого соединен с выходом синхронизатора, переключатель сектора обзора, генератор строб-импульса, тепловизионный датчик, вход которого соединен с выходом синхронизатора, телевизионный датчик, вход которого соединен с выходом синхронизатора, блок приема и четыре канала передачи и приема сигналов, каждый из которых состоит из последовательно подключенных к выходу синхронизатора передатчика, антенного переключателя, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередающей антенной, приемник, второй вход которого соединен с выходом генератора строб-импульса, и блок обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу четырехцветного индикатора, при этом выходы антенного переключателя, тепловизионного и телевизионного датчиков подключены к соответствующим входам блока приема, приемопередающие антенны размещены на концах лопастей несущего винта, отличается от ближайшего аналога тем, что оно снабжено n-отводной линией задержки, сумматором, процессором с программным обеспечением и монитором, причем к выходу блока приема последовательно подключены n-отводная линия задержки, сумматор, первый вход которого соединен с выходом блока приема, процессор с программным обеспечением, вход управления которого соединен с выходом синхронизатора, и монитор, n-отводная линия задержки и сумматор расположены по окружности.
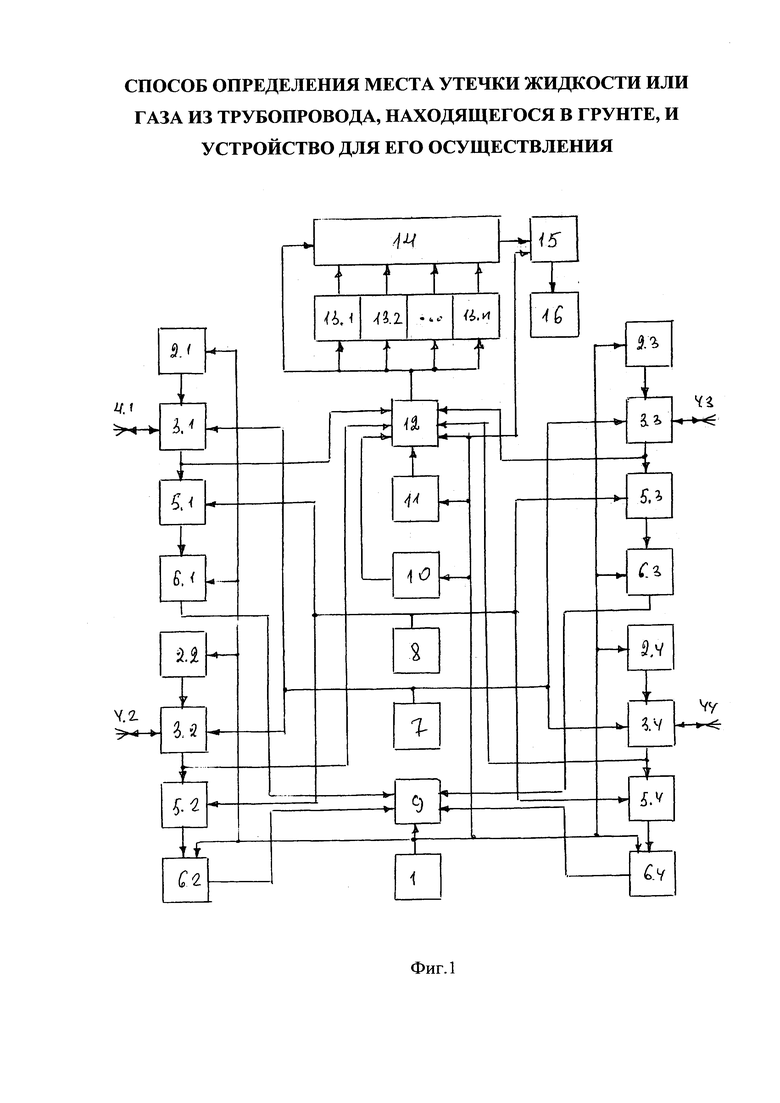
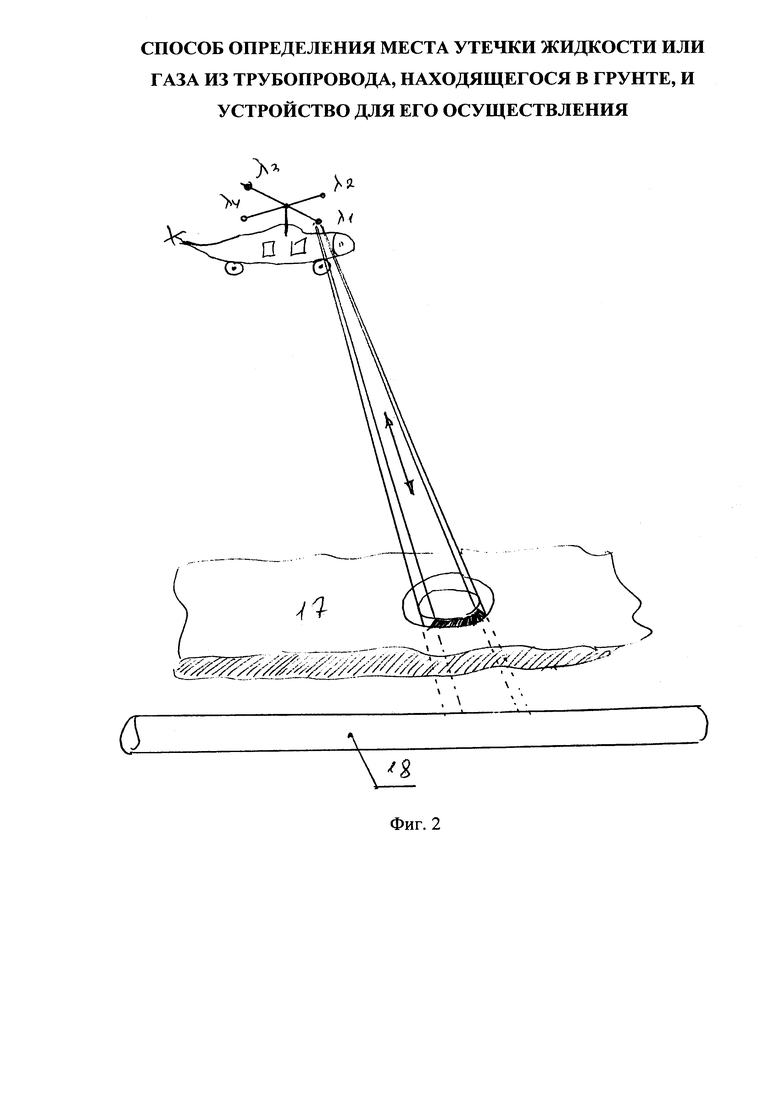
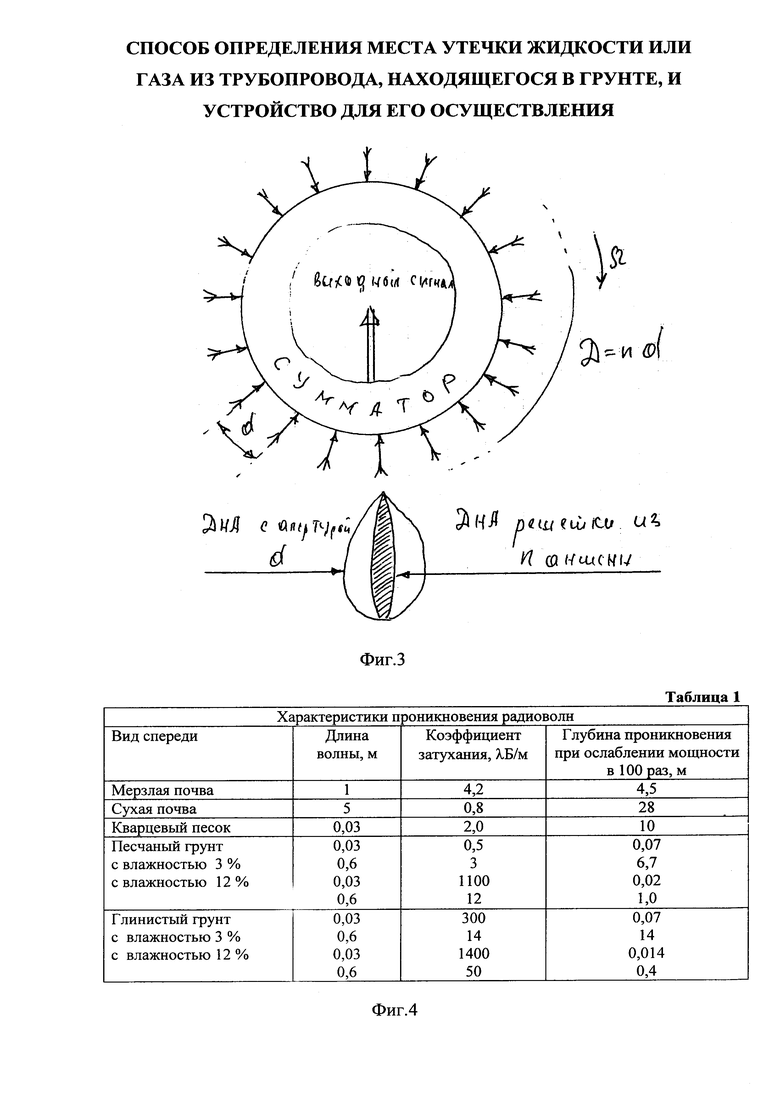
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг. 1. Расположение приемопередающих антенн локаторов на концах лопастей несущего винта вертолета показана на фиг. 2. Принцип формирования синтезированной апертуры дуговой формы приемных антенн показан на фиг. 3. Характеристики проникновения радиоволн различных длин изображены на фиг. 4. Значения угловой разрешающей способности при различных длинах волн представлены на фиг. 5.
Устройство содержит последовательно включенные синхронизатор 1 и четырехцветный индикатор 9, переключатель 7 сектора обзора, генератор 8 строб-импульса, вход управления которого соединен с выходом синхронизатора 1, тепловизионный датчик 10, телевизионный датчик 11, вход управления которого соединен с выходом синхронизатора 1, блок 12 приема и четыре канала передачи и приема сигналов, каждый из которых состоит из последовательно подключенных к выходу синхронизатора 1 передатчика 2.1 (2.2, 2.3, 2.4), антенного переключателя 3.1 (3.2, 3.3, 3.4), второй вход которого соединен с выходом переключателя 7 сектора обзора, приемник 5.1 (5.2, 5.3, 5.4), второй вход которого соединен с выходом генератора 8 строб-импульса, и блок 6.1 (6.2, 6.3, 6.4) обработки, второй вход которого соединен с выходом синхронизатора 1, а выход подключен к соответствующему входу четырехцветного индикатора 9. К выходу блока 12 приема, к соответствующим входам которого подключены выходы антенного переключателя 3.1 (3.2, 3.3, 3.4), тепловизионного 10 и телевизионного 11 датчиков, последовательно подключены n-отводная линия задержки 13.i (i=1, 2, …, n), сумматор 14, первый вход которого соединен с выходом блока 12 приема, процессор 15 с программным обеспечением и монитор 16.
Предлагаемый способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, осуществляется следующим образом.
На вертолете размещаются четыре радиолокатора, тепловизионное и телевизионное устройства и блок цифровой фильтрации сигналов тепловизионного, телевизионного и радиолокационных устройств.
При облете трубопровода на вертолете производятся:
- обзор трубопровода четырьмя радиолокаторами с λ1=5 м, λ2=1 м, λ3=0,6 м и λ4=0,003 м для определения места залегания трубопровода (трассы трубопровода);
- синхронизированное по времени наблюдение пространства над трассой трубопровода съюстированными тепловизионным и телевизионным устройствами;
- совместная цифровая фильтрация сигналов радиолокационных, тепловизионного и телевизионного устройств, которая позволяет определить профиль залегания трубопровода и выделить тепловые пятна на грунте по трассе трубопровода в месте утечки из трубопровода.
Основой предлагаемого способа являются принцип совместной логической обработки сигналов, съюстированных и синхронно работающих информационных тепловизионного, телевизионного и радиолокационного каналов и принцип синтезирования апертуры приемных антенн дуговой формы.
Радиолокационный канал обеспечивает точное определение места залегания трубопровода (трассы трубопровода).
Вырабатываемые в синхронизаторе 1 импульсы запускают четыре передатчика 2.1÷2.4 и управляют четырьмя блоками 6.1-6.4 обработки сигналов. Импульс синхронизатора 1 также управляет работой генератора 8 строб-импульса, цветного индикатора 9, тепловизионного датчика 10, телевизионного датчика 11 и блока 12 приема. Длительность и положение во времени строб-импульса определяют положение и протяженность наблюдаемого элемента земной поверхности по дальности. Этот импульс и подается на блоки 6.1-6.4 обработки.
Каждый передатчик работает на своей длине волны, которая определяет глубину проникновения электромагнитного излучения под подстилающую поверхность 17.
Зондирующие импульсы с передатчиков 2.1-2.4 через антенные переключатели 3.1-3.4 поступают на свои антенны 4.1-4.4, каждая из которых расположена на конце лопасти несущего винта вертолета (фиг. 2).
Каждая антенна, расположенная на конце вращающейся лопасти, подключается к своему передатчику и приемнику только в момент прохождения определенного заранее установленного сектора обзора. Это осуществляется с помощью переключателя 7 сектора обзора, который представляет собой электрический контакт, выполненный в виде четырех щеток, расположенных под соответствующими лопастями, перемещающихся в процессе вращения по неподвижному токопроводящему сегменту, который в свою очередь может устанавливаться в фиксированном положении вокруг оси винта. Каждые передатчик и приемник подключаются к антенне только в период прохождения соответствующей щетки по сегменту. Положение сегмента определяет положение сектора обзора в пространстве.
С антенн 4.1-4.4 сигналы излучаются в направлении подстилающей поверхности 17. Отраженные от трубопровода 18 сигналы принимаются антеннами 4.1-4.4 и через антенные переключатели 3.1-3.4 подаются на приемники 5.1-5.4, а затем на блоки 6.1-64 обработки, в которых обрабатываются сигналы, принятые с определенного участка дальности, положение и протяженность которого определяется стробирующим импульсом, подаваемым с генератора 8. С блоков 6.1-6.4 обработки сигналы поступают на индикатор 9 с цветным изображением, причем сигналы с каждого блока обработки соответствуют изображению в определенном цвете.
Применение четырех радиолокаторов с λ1=5 м, λ2=1 м, λ3=0,6 м, λ4=0,003 м с синтезированной апертурой позволяет обнаружить и определить координаты трубопровода 18, расположенного под подстилающей поверхностью земли 17, с высокой угловой разрешающей способностью. При этом одновременно по цвету изображения можно судить о глубине расположения трубопровода 18 под поверхностью земли 17.
Тепловизионный канал позволяет фиксировать прямой физический признак утечки газа из заглубленного газопровода в виде локального понижения температуры (отрицательного теплового контраста на поверхности покрытия газопровода в районе течи) вследствие проявления дроссельного эффекта при истечении газа из газопровода. При этом возможные поверхностные тепловые контрасты в районе течи по имеющимся экспериментальным и расчетным данным составляют до 8-10°С, что существенно превышает пороговые характеристики контрастной чувствительности тепловизионных приборов (0,5-1,0°С) и, следовательно, может быть выявлено измерениями. Однако эффективное выделение места течи по этому прямому физическому признаку затруднено вследствие наличия естественной неоднородности температурного поля.
В районе залегания трубопровода значения случайных температурных контрастов, вызванных рядом факторов: характером покрытия и структурой почвы, временем суток, года, метеоусловиями, - могут быть соизмеримы или даже превышать значения идентифицируемых локальных температурных контрастов в районе течи. Соответственно, для повышения надежности селекции места течи предлагается использовать информацию дополнительных каналов: радиолокационного и телевизионного, позволяющих выделить косвенные признаки, сочетание которых с измерением прямого признака (отрицательного теплового контраста) существенно снижает вероятность ошибочной идентификации (ложной тревоги).
Так, радиолокационный канал, выделяя геометрическое расположение металлического трубопровода 18 на местности по контрастам радиолокационных сигналов на четырех частотах, формирует тем самым косвенный логический признак возможного расположения места течи, а именно только в районе расположения трубопровода 18.
Телевизионный канал, выделяя поле контрастов, первопричиной которых является наличие внешнего источника подсветки (солнца), также позволяет формировать косвенные логические признаки наличия течи, т.е. внутреннего, не связанного с внешней подсветкой, источника отрицательного теплового контраста, за счет совместной оценки размеров фактуры знака контрастных образований телевизионного и тепловизионного кадров с учетом условий подсветки.
Таким образом, совместный логический анализ (фильтрация) сигналов многоканальной системы, измеряющей прямой признак (тепловой контраст) и косвенные признаки (контрасты отраженного излучения внешних источников подсветки видимого и радиодиапазонов), позволяет существенно повысить эффективность обнаружения течи по сравнению с одноканальным способом, например тепловизионного или спектрального анализа поглощения газовых продуктов на местности.
Анализ таблицы (фиг. 4) свидетельствует, что использование более коротковолнового радиоизлучения не обеспечивает локации трубопровода 18 при требуемых заглублениях (1.5-2 м). С другой стороны, локация более длинноволновым диапазоном (десятки метров и более), обеспечивая прохождение сигнала на требуемую глубину залегания трубопровода, имеет неудовлетворительные показатели по точности пеленгации сигналов (в пределах десятков градусов).
Для формирования синтезированной апертуры выходной сигнал блока 12 приема непосредственно и через n-отводную линию задержки 13-i (i=1, 2, …, n) поступает на сумматор 14. Диаграмма направленности антенной решетки (ДНА) формируется в результате когерентного сложения колебаний, принимаемых отдельными ее элементами. Так, если антенная система состоит из n рядом расположенных одинаковых антенн размером d и сигналы, принимаемые каждой антенной, когерентно суммируются, антенная решетка имеет такую же узкую диаграмму направленности, как и антенна размером D=nd (фиг. 3).
В синтезированной апертуре применяются четыре приемопередающие антенны 4.1-4.4, широкая диаграмма направленности которых направлена перпендикулярно траектории полета вертолета.
Задерживая выходной сигнал блока 12 приема на время
 ,
,
где Ω - скорость вращения винта вертолета,
последовательно принимая в каждой точке траектории сигналы и когерентно их суммируя, можно получить узкую диаграмму направленности искусственно сформированной антенной решетки. Размер решетки, т.е. размер синтезированной апертуры приемных антенн, равен длине ℓ участка траектории, на котором когерентно суммируются сигналы, принятые в разные моменты в разных последовательных точках траектории.
Максимально возможная (потенциальная) угловая разрешающая способность устройства по азимуту определяется шириной диаграммы направленности синтезированной антенны
 ,
,
где ℓ - размер участка траектории вращающихся антенн, на котором обрабатываются принимаемые сигналы и синтезируется апертура.
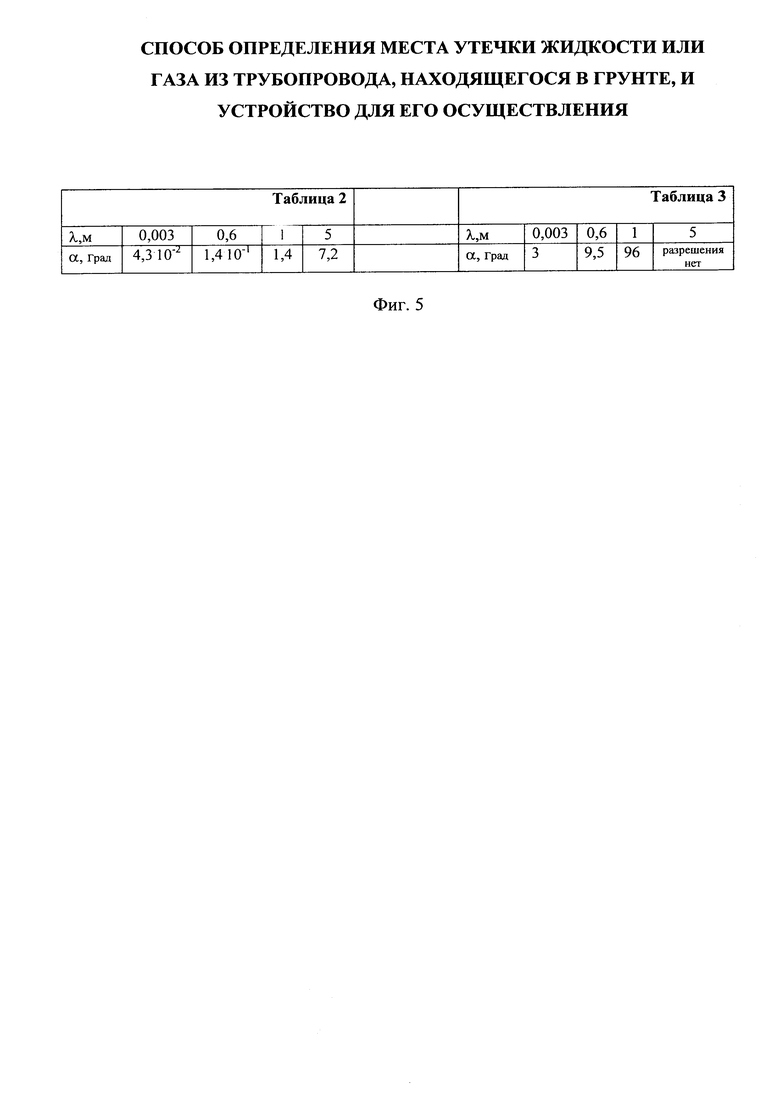
Анализ возможностей использования предлагаемого способа на существующих вертолетах типа МИ-6, МИ-8, МИ-24, МИ-26 с длиной лопасти 1-20 м, числом оборотов винта 200 об/мин позволяет получить следующие значения угловой разрешающей способности на разных глубинах, соответствующих длинам рабочих волн, значения которой при эффективной длине синтезированной апертуры 20 приведены в таблице 2 (фиг. 5).
Для сравнения в таблице 3 (фиг. 5) приведены значения угловой разрешающей способности при различных длинах волн, которые можно обеспечить без синтезирования при ширине лопасти d=600 м (α=λ/d).
Совместное рассмотрение таблиц 2 и 3 (фиг. 5) позволяет сделать вывод о том, что предлагаемый радиолокационный канал позволяет повысить угловую разрешающую способность при тех же длинах волн приблизительно в 100 раз.
Процессор 15 предназначен для обработки информационных параметров отраженных сигналов, их сопоставление с базой данных, введенных в программное обеспечение.
Видеомонитор 16 предназначен для визуального наблюдения за текущей информацией, поступающей из процессора 15.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами обеспечивают повышение точности определения места утечки жидкости или газа из трубопровода, находящегося в грунте. Это достигается путем формирования узкой диаграммы направленности приемных антенн за счет синтезирования их апертуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 2002 |
|
RU2231037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| Устройство позиционирования мобильных агрегатов при возделывании агрокультур | 2019 |
|
RU2710163C1 |
| Вертолетная радиолокационная станция | 1991 |
|
SU1810859A1 |
Группа изобретений относится к области дистанционного контроля герметичности газонефтесодержащего оборудования и может быть использована для определения места утечки жидкости или газа из магистрального трубопровода, находящегося в траншее под грунтом. Сущность: устройство, реализующее способ, содержит синхронизатор (1), четыре канала передачи сигналов, переключатель (7) сектора обзора, генератор (8) строб-импульса, четырехцветный индикатор (9), тепловизионный датчик (10), телевизионный датчик (11), блок (12) приема, n-отводную линию (13.1-13.n) задержки, сумматор (14), процессор (15) с программным обеспечением, монитор (16). Каждый из каналов передачи и приема сигналов состоит из передатчика (2.1-2.4), антенного переключателя (3.1-3.4), приемопередающей антенны (4.1-4.4), приемника (5.1-5.4), блока (6.1-6.4) обработки. Технический результат: повышение точности определения места утечки посредством формирования узкой диаграммы направленности приемных антенн за счет синтезирования их апертуры. 2 н.п. ф-лы, 5 ил.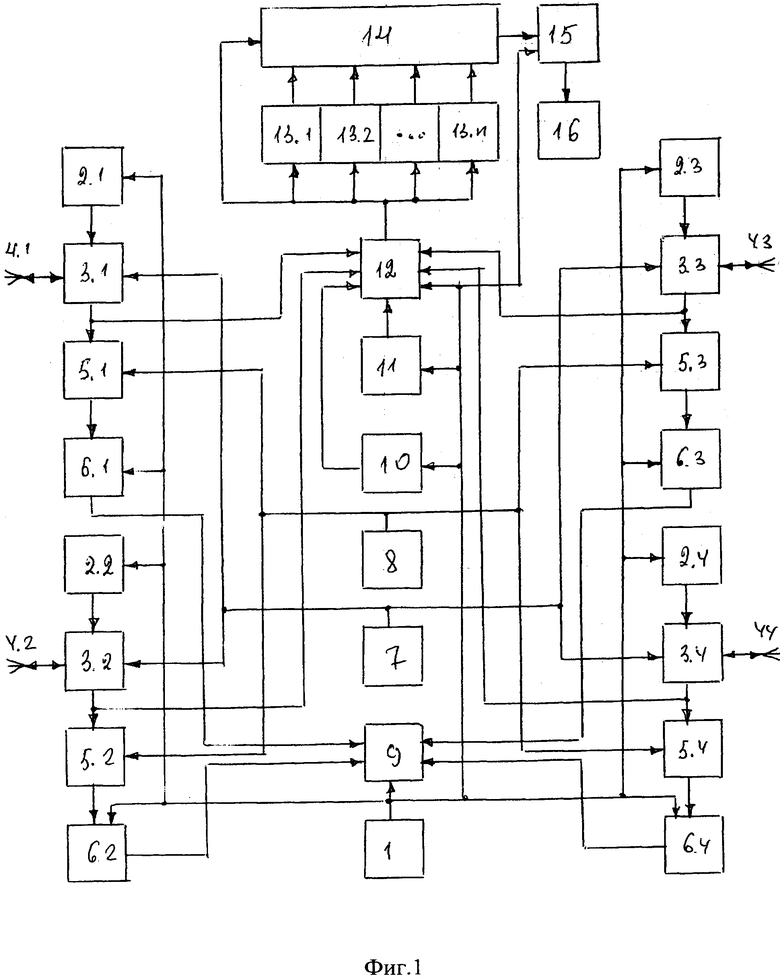
1. Способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, заключающийся в обзоре трубопровода трассоискателем путем облета на вертолете, одновременном сканировании трубопровода съюстированными тепловизионным и телевизионным датчиками и совместной цифровой фильтрации сигналов локатора, тепловизионного и телевизионного датчиков, при этом в качестве трассоискателя используют дополнительные три локатора разных длин волн, приемопередающие антенны четырех локаторов размещают на концах лопастей несущего винта вертолета, принятые ими сигналы обрабатывают по алгоритму синтезированной апертуры, а о месте утечки жидкости или газа из трубопровода судят по локальному понижению температуры, зарегистрированному тепловизионным датчиком, и информации, полученной радиолокаторами и телевизионным датчиком, а о глубине залегания трубопровода судят по цвету его изображения на экране индикатора, отличающийся тем, что вращение лопастей несущего винта вертолета используют для формирования синтезированной апертуры дуговой формы, для чего выходное напряжение блока приема пропускают через n-отводную линию задержки, расположенную на окружности, суммируют его и выходное напряжение блока приема, суммарное напряжение обрабатывают по алгоритму синтезирования апертуры дуговой формы и регистрируют его.
2. Устройство определения места утечки жидкости и газа, находящегося в грунте, содержащее синхронизатор, четырехцветный индикатор, вход управления которого соединен с выходом синхронизатора, переключатель сектора обзора, генератор строб-импульса, тепловизионный датчик, вход которого соединен с выходом синхронизатора, телевизионный датчик, вход которого соединен с выходом синхронизатора, блок приема и четыре канала передачи и приема сигналов, каждый из которых состоит из последовательно подключенных к выходу синхронизатора передатчика, антенного переключателя, второй вход которого соединен с выходом переключателя сектора обзора, а вход-выход связан с приемопередающей антенной, приемника, второй вход которого соединен с выходом генератора строб-импульса, и блок обработки, второй вход которого соединен с выходом синхронизатора, а выход подключен к соответствующему входу четырехцветного индикатора, при этом выходы антенного переключателя, тепловизионного и телевизионного датчиков подключены к соответствующим входам блока приема, приемопередающие антенны размещены на концах лопастей несущего винта, отличающееся тем, что оно снабжено n-отводной линией задержки, сумматором, процессором с программным обеспечением и монитором, причем к выходу блока приема последовательно подключены n-отводная линия задержки, сумматор, первый вход которого соединен с выходом блока приема, процессор с программным обеспечением, вход управления которого соединен с выходом синхронизатора, и монитор, n-отводная линия задержки и сумматор расположены по окружности.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 2002 |
|
RU2231037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
| RU 2007112857 A, 10.10.2008 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 1991 |
|
RU2040783C1 |

