Уровень техники
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования оптических томографических изображений, в частности к устройству формирования оптических томографических изображений, используемому в офтальмологической диагностике и лечении, и т.п.
Описание предшествующего уровня техники
В настоящее время применяются офтальмологические устройства, которые используют оптические устройства.
Например, различные устройства, такие как устройство фотографирования переднего сегмента головы, камера для глазного дна и сканирующий лазерный офтальмоскоп (SLO), используются в качестве оптических устройств для наблюдения глаза.
Из таких оптических устройств устройство формирования оптических томографических изображений на основе оптической когерентной томографии (в дальнейшем называемое OCT), которое использует многоволновую интерференцию света, допускает получение томографического изображения высокого разрешения образца.
OCT становятся обязательными офтальмологическими устройствами для специалистов по амбулаторному лечению сетчатки глаза.
Согласно устройству формирования оптических томографических изображений, описанному выше, когда образец облучается с помощью измерительного луча, который является низкокогерентным светом, обратнорассеянный свет из образца может измеряться с высокой чувствительностью посредством использования системы на основе интерференции.
Помимо этого посредством сканирования измерительного луча для образца устройство формирования оптических томографических изображений может получать томографическое изображение высокого разрешения.
Следовательно, поскольку устройство формирования оптических томографических изображений также допускает формирование томографических изображений высокого разрешения сетчатки глаза в глазном дне, которое должно проверяться, устройства формирования оптических томографических изображений широко используются в офтальмологической диагностике и лечении сетчатки глаза.
В последние годы, в офтальмологических устройствах формирования оптических томографических изображений проводится переход от традиционной оптической когерентной томографии временной области к оптической когерентной томографии области Фурье, которая предоставляет формирование изображений на более высоких скоростях.
Хотя информация получается согласно конкретной глубине в глазу для проверки при оптической когерентной томографии временной области, поскольку оптическая когерентная томография области Фурье совместно получает информацию в направлении глубины, может выполняться высокоскоростное формирование изображений.
Высокоскоростное формирование изображений предоставляет предупреждение размытия изображения и потери изображения вследствие окулярного перемещения посредством непроизвольного движения глаза.
С другой стороны, известное оптическое устройство предложено в выложенной заявке на патент (Япония) номер 2002-174769, чтобы удовлетворить обеим потребностям в более высоком разрешении и в уменьшении времени формирования изображений.
В частности, предложено оптическое устройство для наблюдения внутренней части биообъекта, которое использует как OCT, так и OCM (оптическая когерентная микроскопия) в зависимости от ситуации.
Устройство выполнено с возможностью использовать OCT при верификации больших структур в биообъекте и переключаться на OCM при дополнительном наблюдении исследуемой зоны в биообъекте при более высоком разрешении.
При этом, поскольку OCT и OCM значительно отличаются друг от друга по глубине резкости (DOF), устройство выполнено с использованием оптической системы с преобразованием диаметра луча так, что могут задаваться диаметры луча, надлежащим образом соответствующие OCT, имеющему небольшую числовую апертуру, и OCM, имеющему большую числовую апертуру.
Соответственно наблюдения могут выполняться при высоком отношении «сигнал-шум».
Помимо этого выложенная заявка на патент (Япония) номер 2007-101250 предлагает устройство формирования оптических томографических изображений, выполненное таким образом, что высокое разрешение достигается посредством OCT вследствие оптической когерентной томографии области Фурье.
Устройство выполнено так, чтобы компенсировать небольшую глубину резкости (DOF), модуль регулирования оптической длины пути используется, чтобы перемещать положение фокусировки измеряемого объекта в направлении глубины, чтобы получать множество изображений, и множество изображений комбинируется, чтобы обнаруживать томографические изображения высокого разрешения измеряемого объекта в горизонтальном направлении и направлении оптической оси.
Сущность изобретения
Тем не менее, устройства в известных примерах, описанных выше, имеют следующие проблемы.
В выложенной заявке на патент (Япония) номер 2002-174769, поскольку формирование изображений выполняется с высоким разрешением, формирование OCT-изображений не выполняется, когда диаметр луча увеличивается.
Следовательно, не рассматриваются сложности в формировании OCT-изображений, возникающие, когда диаметр луча для измерительного луча увеличивается при выполнении формирования изображений высокого разрешения с использованием оптической системы с преобразованием диаметра луча.
Помимо этого выложенная заявка на патент (Япония) номер 2007-101250 не раскрывает способы достижения более высокой скорости в ходе формирования изображений и, следовательно, отнимает время на то, чтобы обнаруживать множество изображений и комбинировать изображения.
С другой стороны, при офтальмологической диагностике и т.п. с помощью устройства формирования оптических томографических изображений имеется значительная необходимость в уменьшении времени формирования изображений, чтобы снижать нагрузку на проверяемые объекты. Как описано выше, устройства в традиционных примерах не рассматривают способы уменьшения времени формирования изображений при выполнении формирования томографических изображений высокого разрешения посредством OCT.
Настоящее изобретение осуществлено с учетом проблем, описанных выше, и его цель заключается в том, чтобы предоставлять устройство формирования оптических томографических изображений, включающее в себя режим низкого разрешения для приблизительного формирования изображений и режим высокого разрешения для получения детальных изображений, и, в частности, устройство формирования оптических томографических изображений, которое предоставляет возможность выполнения формирования томографических изображений в ходе режима высокого разрешения на более высоких скоростях.
Согласно одному аспекту настоящего изобретения предусмотрено устройство формирования оптических томографических изображений, которое расщепляет свет из источника света на измерительный луч и опорный луч, направляет измерительный луч на объект и опорный луч на зеркало опорного луча, обнаруживает луч, комбинирующий отраженный луч измерительного луча, отражаемого или рассеянного посредством объекта, и опорный луч, отражаемый посредством зеркала опорного луча, и выполняет формирование томографических изображений объекта. Устройство формирования оптических томографических изображений содержит: модуль регулирования диаметра луча, который регулирует диаметр луча для измерительного луча, который должен направляться на объект; модуль обнаружения, который включает в себя спектроскопический модуль, модуль формирования изображений и матрицу элементов оптоэлектрического преобразования и который обнаруживает комбинированный луч; и модуль изменения, который считывает сигнал из матрицы элементов оптоэлектрического преобразования на основе диаметра луча, регулируемого посредством модуля регулирования диаметра луча, и изменяет отношение числа пикселов, используемых для формирования изображений, к ширине спектра длин волн источника света.
Согласно другому аспекту настоящего изобретения предусмотрено устройство формирования изображений, которое захватывает томографическое изображение на основе оптической интерференции с использованием комбинированного луча, который комбинирует отраженный луч от объекта, облучаемого посредством измерительного луча, и опорный луч, соответствующий измерительному лучу. Устройство формирования изображений содержит: модуль изменения диаметра луча, который изменяет диаметр луча для измерительного луча; и модуль обнаружения, который обнаруживает комбинированный луч при разрешении, соответствующем диаметру луча.
Согласно еще одному другому аспекту настоящего изобретения предусмотрено устройство формирования изображений, которое захватывает томографическое изображение на основе оптической интерференции с использованием комбинированного луча, который комбинирует отраженный луч от объекта, облучаемого посредством измерительного луча, и опорный луч, соответствующий измерительному лучу. Устройство формирования изображений содержит: модуль изменения диаметра луча, который изменяет диаметр луча для измерительного луча; спектроскопический модуль, который отделяет комбинированный луч; модуль изменения диапазона, который изменяет диапазон, в котором должен облучаться разделенный луч, согласно диаметру луча; модуль обнаружения, который обнаруживает свет из модуля изменения диапазона; и модуль обнаружения, который обнаруживает томографическое изображение на основе оптической интерференции объекта на основе выходного сигнала диапазона из модуля обнаружения.
Согласно еще одному другому аспекту настоящего изобретения предусмотрен способ формирования изображений, который захватывает томографическое изображение на основе оптической интерференции с использованием комбинированного луча, который комбинирует отраженный луч от объекта, облучаемого посредством измерительного луча, и опорный луч, соответствующий измерительному лучу. Способ формирования изображений содержит: изменение диаметра луча для измерительного луча; и обнаружение комбинированного луча при разрешении, соответствующем диаметру луча.
Согласно настоящему изобретению может быть реализовано устройство формирования оптических томографических изображений, включающее в себя режим низкого разрешения для приблизительного формирования изображений и режим высокого разрешения для получения детальных изображений, и, в частности, устройство формирования оптических томографических изображений, которое предоставляет возможность выполнения формирования томографических изображений в ходе режима высокого разрешения на более высоких скоростях.
Следовательно, может быть предусмотрено устройство формирования оптических томографических изображений, которое предоставляет формирование томографических изображений сетчатки глаза с уменьшенной нагрузкой на объект в ходе офтальмологической диагностики и т.п.
Дополнительные признаки настоящего изобретения должны стать очевидными из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Фиг.1A и 1B являются схемами, описывающими конфигурацию оптических систем устройств формирования оптических томографических изображений согласно первому и второму вариантам осуществления настоящего изобретения, при этом Фиг.1A является схемой, описывающей конфигурацию первого варианта осуществления, а Фиг.1B является схемой, описывающей конфигурацию второго варианта осуществления.
Фиг.2A, 2B, 2C, 2D, 2E, 2F, 2G и 2H являются схемами, описывающими первый вариант осуществления настоящего изобретения. Фиг.2A-2D являются схемами, описывающими взаимосвязи между положениями затвора и диапазонами глубины резкости (DOF), а Фиг.2E-2H являются схемами, описывающими модуль преобразования диаметра луча.
Фиг.3A, 3B, 3C и 3D являются схемами, описывающими операции линейных датчиков согласно первому и второму вариантам осуществления настоящего изобретения. Фиг.3A и 3B являются схемами, описывающими операции линейного датчика согласно первому варианту осуществления, а Фиг.3C и 3D являются схемами, описывающими операции линейного датчика согласно второму варианту осуществления.
Фиг.4A, 4B, 4C, 4D и 4E являются схемами, описывающими третий вариант осуществления настоящего изобретения. Фиг.4A является схемой, описывающей конфигурацию оптической системы устройства формирования оптических томографических изображений, а Фиг.4B-4E являются схемами, описывающими взаимосвязи между положениями затвора и диапазонами глубины резкости (DOF) в ходе зональной фокусировки.
Фиг.5A, 5B, 5C и 5D являются схемами, описывающими спектроскопы устройств формирования оптических томографических изображений согласно четвертому и пятому вариантам осуществления настоящего изобретения. Фиг.5A и 5B являются схемами, описывающими спектроскоп согласно четвертому варианту осуществления, а Фиг.5C и 5D являются схемами, описывающими спектроскоп согласно пятому варианту осуществления.
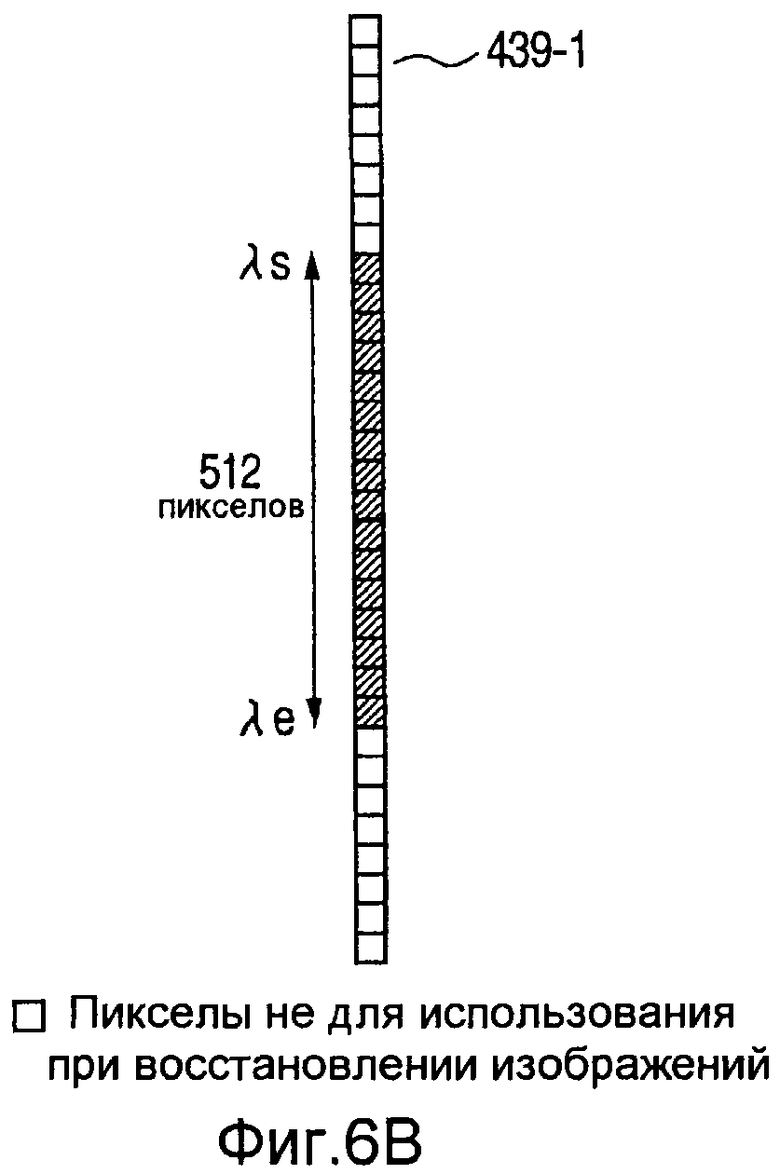
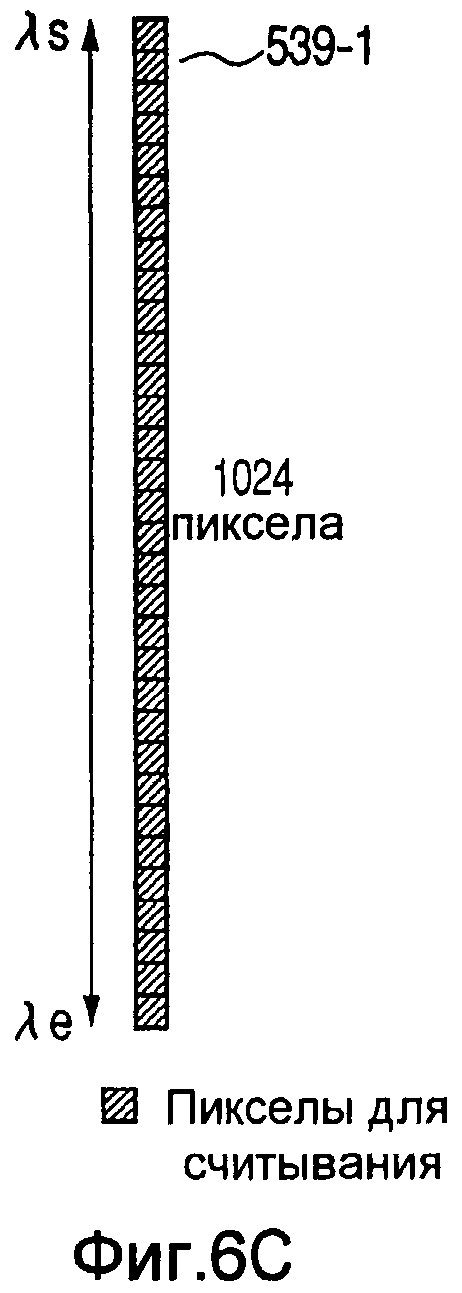
Фиг.6A, 6B, 6C, 6D и 6E являются схемами, описывающими операции линейных датчиков согласно четвертому и пятому вариантам осуществления настоящего изобретения. Фиг.6A и 6B являются схемами, описывающими операции линейного датчика согласно четвертому варианту осуществления, а Фиг.6C и 6D являются схемами, описывающими операции линейного датчика согласно пятому варианту осуществления.
Подробное описание вариантов осуществления
Предпочтительные варианты осуществления настоящего изобретения далее подробно описаны в соответствии с прилагаемыми чертежами.
Ниже описаны примерные варианты осуществления настоящего изобретения.
Варианты осуществления
Первый вариант осуществления
В первом варианте осуществления устройство формирования оптических томографических изображений, к которому применяется настоящее изобретение, описано со ссылкой на Фиг.1A.
Фиг.1A иллюстрирует устройство 100 формирования оптических томографических изображений, источник 101 света, разделитель 103 луча, опорный луч 105, измерительный луч 106, комбинированный луч 142 и глаз 107 для проверки, который является объектом.
Также проиллюстрированы отраженный луч 108, одномодовое волокно 110, линзы 111, 120 и 135 и зеркало 114.
Фиг.1A также иллюстрирует стекло 115 для компенсации дисперсии, каскад 117 с электроприводом, X-Y-сканер 119 и персональный компьютер 125.
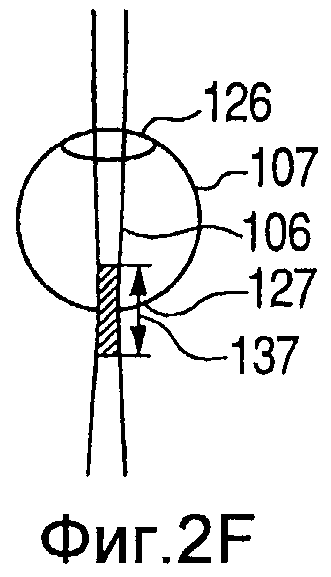
Также проиллюстрированы роговица 126, сетчатка 127 глаза, регулируемый расширитель 136 луча, который является модулем изменения диаметра луча, спектроскоп 150, который является модулем обнаружения, линейная камера 139, модуль 140 захвата изображений и пропускающая решетка 141, которая является спектроскопическим модулем.
Устройство формирования оптических томографических изображений согласно настоящему варианту осуществления составляет OCT-устройство оптической когерентной томографии области Фурье (OCT области Фурье).
Во-первых, описана общая конфигурация полной оптической системы устройства формирования оптических томографических изображений согласно настоящему варианту осуществления со ссылкой на Фиг.1A.
Как проиллюстрировано на Фиг.1A, в целом, устройство 100 формирования оптических томографических изображений согласно настоящему варианту осуществления составляет систему интерференции Майкельсона.
На схеме свет, выходящий из источника 101 света, расщепляется на опорный луч 105 и измерительный луч 106 посредством расщепителя 103 луча. Измерительный луч 106 проходит через регулируемый расширитель 136 луча и возвращается как отраженный луч 108, который отражается или рассеивается посредством глаза 107 для проверки, который является объектом наблюдения.
После того, как опорный луч 105 и отраженный луч 108 комбинированы посредством расщепителя 103 луча, опорный луч 105 и отраженный луч 108 направляются в спектроскоп 150, который составляет модуль обнаружения для обнаружения комбинированного луча.
Спектроскоп 150 включает в себя пропускающую решетку 141, которая составляет спектроскопический модуль, линзу 135-2, которая составляет модуль формирования изображений, и линейную камеру 139.
Комбинированный луч разделяется на каждую длину волны посредством пропускающей решетки 141 в спектроскопе 150 и входит в линейную камеру 139.
Линейная камера 139 преобразует силу света в напряжение для каждого положения (длины волны) с использованием линейного датчика, который является матрицей элементов оптоэлектрического преобразования в линейной камере 139. Томографическое изображение глаза 107 для проверки формируется с использованием сигналов. Способ формирования томографического изображения описан ниже.
Далее описана внешняя граница источника 101 света.
Источник 101 света является SLD (суперлюминесцентным диодом), который является типичным источником низкокогерентного света. Источник 101 света имеет длину волны в 840 нм и ширину спектра в 50 нм.
Ширина спектра влияет на разрешение в направлении оптической оси томографического изображения, которое должно получаться, и является, следовательно, важным параметром.
Помимо этого ближний инфракрасный свет является подходящим в качестве длины волны при рассмотрении того факта, что обследоваться должен глаз. Кроме того, поскольку длина волны влияет на разрешение в горизонтальном направлении томографического изображения, которое должно получаться, длина волны предпочтительно является короткой в максимально возможной степени. В этом случае длина волны задается равной 840 нм. В зависимости от объекта могут выбираться другие длины волны.
Свет, выводимый из источника 101 света, проходит через одномодовое волокно 110 и направляется в линзу 111 и выводится как направленный свет.
Далее описаны взаимосвязи соответствия между режимами и соответствующими диаметрами луча.
Регулируемый расширитель 136 луча составляет модуль регулирования диаметра луча и отвечает за варьирование диаметра луча для измерительного луча 106.
Регулируемый расширитель 136 луча может варьировать диаметр луча на 1-4 мм. Модуль регулирования диаметра луча не ограничен регулируемым расширителем луча, и диаметр луча также может варьироваться посредством выбора апертур с различными диаметрами и вставки апертур в оптический путь измерительного луча.
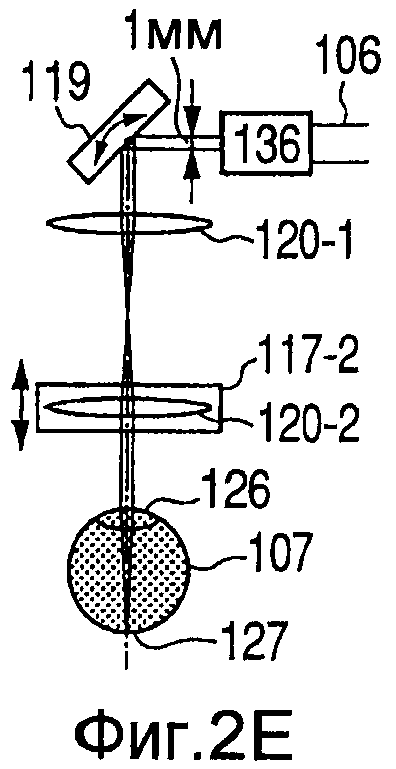
Регулируемый расширитель луча состоит из комбинации собирательной линзы и рассеивающей линзы (не показана), посредством чего диаметр луча увеличивается (Фиг. 2G) или уменьшается (Фиг. 2E) посредством варьирования разнесения между линзами.
В устройстве диаметр луча в ходе режима низкого разрешения задается равным 1 мм, а диаметр луча в ходе режима высокого разрешения задается равным 4 мм.
Режим низкого разрешения - это состояние, проиллюстрированное на Фиг.2E, когда диаметр светового пятна на сетчатке 127 глаза является большим.
Режим предназначен для того, чтобы выполнять приблизительное формирование изображений сетчатки глаза в самом широком возможном диапазоне.
Режим высокого разрешения - это состояние, проиллюстрированное на Фиг.2G, когда диаметр светового пятна на сетчатке 127 глаза является небольшим. Режим должен использоваться при детальном просмотре интересующей части сетчатки глаза.
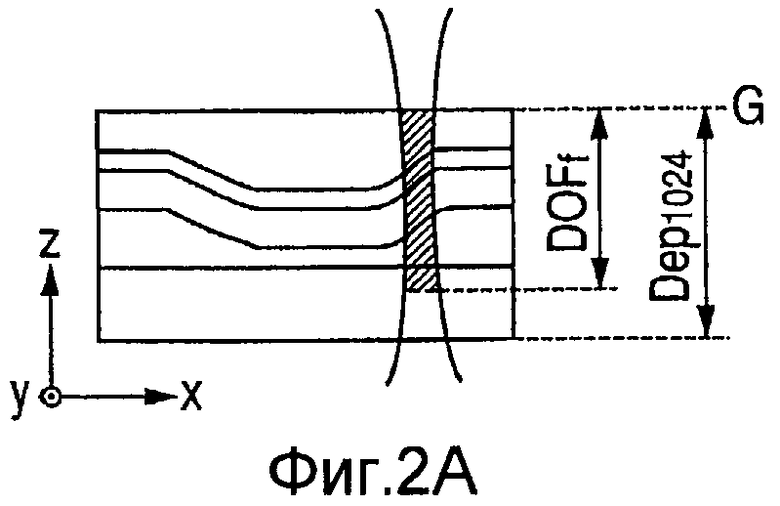
С другой стороны, в отношении глубины резкости (DOF) 137, проиллюстрированной на Фиг.2A-2H, глубина резкости (DOF) (должна обозначаться как DOF1), когда диаметр луча задается равным 1 мм (Фиг.2E) в ходе режима низкого разрешения, может вычисляться с использованием выражения (2) как приблизительно ±1 мм (диапазон глубины резкости (DOF) в 2 мм).
Помимо этого глубина резкости (DOF) (должна обозначаться как DOFh), когда диаметр луча задается равным 4 мм (Фиг.2G), может вычисляться как приблизительно ±0,05 мм (диапазон глубины резкости (DOF) в 0,1 мм).
Кроме того, с использованием выражения (1), разрешения Rxy по горизонтали могут соответственно вычисляться как приблизительно 20 мкм, когда диаметр луча задается равным 1 мм (Фиг.2E), и как приблизительно 5 мкм, когда диаметр луча задается равным 4 мм (Фиг.2G). Следовательно, томографическое изображение высокой четкости с высоким разрешением по горизонтали может получаться в режиме высокого разрешения.
Rxy=k1•λ/NA…, выражение (1)
где k1 - это константа приблизительно в 0,5.
С другой стороны, глубина резкости (DOF) системы формирования изображения может быть выражена посредством следующего:
DOF=±k2•(λ/NA2) …, выражение (2)
где k2 - это константа приблизительно в 0,6.
В вышеуказанных выражениях DOF обозначает глубину резкости (DOF), Rxy - разрешение по горизонтали, NA - числовую апертуру в глазу, который формирует изображение направленного измерительного луча, а A - центральную длину волны измерительного луча.
NA определяется посредством диаметра луча и фокусного расстояния глаза, и если фокусное расстояние глаза задается равным 22,5 мм, то NA~d/(2•f), где d обозначает диаметр луча, а f обозначает фокусное расстояние глаза во время измерения.
В вышеприведенных вычислениях использованы NAd=1mm=0,022, когда диаметр луча задается равным 1 мм, и NAd=4mm=0,088, когда диаметр луча задается равным 4 мм.
Далее описан оптический путь опорного луча 105.
Опорный луч 105, разделенный посредством разделителя 103 луча, падает на зеркало 114-2, чтобы изменять направление, концентрируется посредством линзы 135-1 на зеркале 114-1 опорного луча и затем отражается и перенаправляется в расщепитель 103 луча.
Затем опорный луч 105 проходит через расщепитель 103 луча и направляется в спектроскоп 150.
Стекло 115 для компенсации дисперсии компенсирует относительно опорного луча 105 дисперсию, которая возникает, когда измерительный луч 106 проходит в и из глаза 107 для проверки, или, другими словами, дисперсию оптической системы, используемой для формирования изображения на глазном яблоке, которое является измеряемым объектом.
Помимо этого каскад 117-1 с электроприводом составляет модуль управления для управления положением зеркала опорного луча. Соответственно оптическая длина пути опорного луча 105 от начала до конца формирования изображений может регулироваться и управляться.
Кроме того, каскад 117-1 с электроприводом может управляться посредством персонального компьютера 125.
Далее описан оптический путь измерительного луча 106.
Измерительный луч 106, разделенный посредством расщепителя 103 луча, падает на зеркало X-Y-сканера 119.
Хотя X-Y-сканер 119 описан как одно зеркало для простоты, фактически два зеркала, а именно X-сканирующее зеркало и Y-сканирующее зеркало размещаются в непосредственной близости друг к другу, чтобы выполнять растровое сканирование сетчатки 127 глаза в направлении, перпендикулярном оптической оси. Помимо этого центр измерительного луча 106 выполнен с возможностью быть совместимым с центром вращения зеркала X-Y-сканера 119.
Линзы 120-1 и 120-2 являются оптической системой, которая составляет модуль концентрирования, который концентрирует луч в объекте для сканирования сетчатки 127 глаза, которая является объектом.
Как проиллюстрировано на Фиг.1A, X-Y-сканер 119 и оптическая система отвечают за сканирование сетчатки 127 глаза с помощью измерительного луча 106 при задании точки поворота около роговицы 126.
В этом случае фокусные расстояния линз 120-1 и 120-2 соответственно заданы равными 50 мм.
Кроме того, каскад 117-2 с электроприводом составляет модуль управления для управления положением модуля концентрирования и допускает регулирование и управление положением вспомогательной линзы 120-2.
Посредством регулирования положения линзы 120-2 измерительный луч 106 может концентрироваться в требуемом слое сетчатки 127 глаза 107 для проверки, который является объектом, от начала до конца формирования изображений, и наблюдение может выполняться.
Случай, когда глаз 107 для проверки содержит ошибку преломления, также может приспосабливаться.
После входа в глаз 107 для проверки измерительный луч 106 становится отраженным лучом 108 вследствие отражения или рассеивания от сетчатки 127 глаза. Отраженный луч 108 отражается посредством расщепителя 103 луча и направляется в линейную камеру 139.
Каскад 117-2 с электроприводом также может управляться посредством персонального компьютера 125.
Далее описана конфигурация системы измерения OCT-устройства согласно настоящему варианту осуществления.
Отраженный луч 108, который является светом, отражаемым или рассеянным из сетчатки 127 глаза, отражается посредством расщепителя 103 луча.
Опорный луч 105 и отраженный луч 108 регулируются так, чтобы комбинироваться в расщепителе 103 луча.
Комбинированный луч 142 разделяется на каждую длину волны посредством пропускающей решетки 141, концентрируется посредством линзы 135-2, и сила света преобразуется в напряжение посредством линейной камеры 139 для каждого положения (длины волны).
В частности, интерференционные полосы области спектра на оси длины волны должны наблюдаться относительно линейной камеры 139.
OCT-устройство выполнено и регулируется таким образом, что 50-нанометровый разделенный луч, с помощью которого линза 135-2 формирует изображение в линейном датчике, который является матрицей элементов оптоэлектрического преобразования, приблизительно соответствует числу пикселов линейного датчика, чтобы считываться посредством линейной камеры.
Линейный датчик выполнен с возможностью временно последовательно считывать сигналы, полученные посредством элементов оптоэлектрического преобразования, совмещенных в одной строке.
Тем не менее в настоящем варианте осуществления линейный датчик содержит два регистра, при этом нечетные пикселы соединяются с одним регистром, а четные пикселы соединяются с другим регистром.
С другой стороны, 50-нанометровый разделенный луч формирует изображение с шириной, соответствующей 1024 пикселам датчика в линейной камере 139.
Фиг.1B схематично иллюстрирует линейный датчик 139-1. Разделенные лучи в рамках от λs (815 нм) до λe (865 нм) формируют изображение в линейном датчике 139-1.
Группа полученных сигналов напряжения преобразуется в цифровые значения посредством модуля 140 захвата изображений и подвергается обработке данных посредством персонального компьютера 125, чтобы формировать томографическое изображение.
В этом случае линейная камера 139 имеет 1024 пиксела, как описано выше, и может получать силу света комбинированного луча 142 для каждой длины волны.
Далее описывается способ получения томографического изображения с использованием настоящего устройства.
Способ получения томографического изображения (поверхности, параллельной оптической оси) сетчатки 127 глаза описан с использованием Фиг.1A и 2A-2D.
После прохождения через роговицу 126 и входа в сетчатку 127 глаза измерительный луч 106 становится отраженным лучом 108 вследствие отражения и рассеивания в различных положениях и достигает линейной камеры 139.
Поскольку ширина спектра источника 101 света имеет широкую ширину спектра и небольшую длину пространственной когерентности, когда оптическая длина пути для пути опорного света и оптическая длина пути для пути измерительного света приблизительно равны, интерференционные полосы могут обнаруживаться посредством линейного датчика 139-1 (см. Фиг.3A и 3B).
Как описано выше, интерференционные полосы, обнаруженные посредством линейного датчика 139-1, соответствуют области спектра на оси длины волны.
Затем, с учетом характеристик линейного датчика 139-1 и пропускающей решетки 141, интерференционные полосы, которые являются информацией по оси длины волны, преобразуются в интерференционные полосы на оси оптической частоты.
Кроме того, информация в направлении глубины может получаться посредством выполнения обратного преобразования Фурье для преобразованных интерференционных полос на оси оптической частоты.
Кроме того, интерференционная полоса может получаться для каждого положения оси X посредством обнаружения интерференционных полос при возбуждении оси X X-Y-сканера 119.
Другими словами, может получаться информация в направлении глубины каждого положения оси X.
Одномерные данные положения в направлении по оси Х относительно направления глубины (направления по оси Z в координате XYZ) упоминаются как сканирование A-типа.
Посредством последовательной компоновки сканирований A-типа всех X положений, которые должны подвергаться формированию изображений во временных рядах, в которых X-сканер вращается, получаются двумерное распределение сил света отраженного луча 108 на плоскости XZ и томографические изображения, показанные на Фиг.2A-2D. Результирующие данные упоминаются как сканирование B-типа.
Диаметры светового пятна в измеряемом объекте отличаются между режимом низкого разрешения и режимом высокого разрешения, описанными выше. В частности, в режиме высокого разрешения соответствующие положения оси X должны получаться с точными интервалами, чтобы использовать преимущество разрешения по горизонтали режима высокого разрешения для сканирований B-типа. По сути, сканирование B-типа комбинируется после получения сканирований A-типа с промежутками в приблизительно 5 мкм, что является разрешением для режима высокого разрешения.
Помимо этого в режиме низкого разрешения сканирования A-типа должны получаться с промежутками в приблизительно 20 мкм, что является разрешением для режима низкого разрешения.
Как описано выше, томографическое изображение является матричной компоновкой полученных сил света сканирования B-типа и отображается, например, посредством экстраполирования сил света по шкале полутонов. На дисплее подсвечены только границы полученного томографического изображения.
Далее описаны взаимосвязи между расстоянием измерения от затвора, числом пикселов и глубиной резкости (DOF).
Теперь, на Фиг.2A-2D, положение оптической длины пути, которое является идентичным зеркалу 114-1 опорного луча на стороне измеряющего луча, обозначается как положение G затвора, а оптическое расстояние от G, на котором формирование изображений может выполняться посредством настоящего устройства, обозначается как оптическое расстояние Dep формирования изображений.
Интерференционные полосы становятся более резкими по мере того, как оптическое расстояние части, которая должна подвергаться формированию изображений, становится больше.
С учетом предела, до которого могут обнаруживаться более резкие интерференционные полосы, оптическое расстояние Dep формирования изображений определяется посредством ширины разделенной длины волны и числа пикселов, соответствующих ширине длины волны, которые должны приниматься посредством линейного датчика 139-1.
Dep=N/(4•ΔK)…, выражение (3)
где Dep обозначает оптическое расстояние формирования изображений, ΔK обозначает выражение для волнового числа ширины длины волны источника света, используемого для измерения, и N обозначает число пикселов в области, в которой изображение формируется посредством ширины спектра длины волны, включенной в комбинированный луч.
Если λs обозначает длину волны с кратчайшей шириной спектра длин волн, а λe - длину волны с самой длинной шириной спектра длин волн, то ΔK может вычисляться с использованием выражения (4). Посредством подстановки λs=815 нм, λe=865 нм настоящего варианта осуществления, в таком случае ΔK=7,1×10-5 (1/нм).
ΔK=|1/λS-1/λe| …, выражение (4)
Посредством подстановки значения ΔK в выражение (3), в таком случае Dep1024=3,6 мм для 1024 считанных пикселов и Dep512=1,8 мм для 512 считанных пикселов.
Между тем, для OCT-устройства для оптической когерентной томографии области Фурье взаимосвязь между положением G затвора на Фиг.2A-2D и измеряемым объектом типично заключает в себе отделение положения G затвора от поверхности измеряемого объекта. Это обусловлено тем, что существует фундаментальная проблема в том, что, когда положение G затвора перемещено в измеряемом объекте, зеркальное изображение, полученное посредством преобразования Фурье, перекрывает действительное изображение.
Помимо этого, когда положение фокусировки измеряемого объекта регулируется, чтобы размещать максимально возможный объем измеряемого объекта в рамках диапазона глубины резкости (DOF), формирование изображений самого широкого диапазона может предпочтительно выполняться относительно направления глубины измеряемого объекта.
Далее описана взаимосвязь между положением затвора, диапазоном глубины резкости (DOF) и оптическим расстоянием формирования изображений для каждого режима.
Во-первых, описан режим низкого разрешения со ссылкой на Фиг.2A и 2B. Как описано выше, диаметр луча задается равным 1 мм, а диапазон глубины резкости (DOF) задается равным 2 мм.
Как проиллюстрировано на Фиг.1A, зеркало 114-1 опорного луча перемещается посредством каскада 117-1 с электроприводом относительно измеряемого объекта.
Допустим, что из положения G затвора, отрегулированного так, как описано выше, линза 120-2 перемещается в направлении по оси Z посредством каскада 117-2 с электроприводом, чтобы входить в диапазон глубины резкости (DOF), чтобы регулировать положение фокусировки.
Если имеется 1024 считанных пиксела, то оптическое расстояние Dep1024 формирования изображений=3,6 мм>глубина DOF1 резкости=2 мм, что означает то, что формирование изображений может выполняться для информации по измеряемому объекту на глубине резкости (DOF) в этом режиме. Помимо этого, как проиллюстрировано на Фиг.2B, когда имеется неоднородность на измеряемом объекте, и положение G затвора должно отделяться от поверхности измеряемого объекта, исследуемая часть должна регулироваться так, чтобы быть включенной в глубину резкости (DOF).
Соответственно формирование изображений может выполняться без влияния посредством зеркального изображения в рамках условия «оптическое расстояние Dep1024 формирования изображений=3,5 мм≥(глубина резкости (DOF)+расстояние от положения затвора до поверхности измеряемого объекта)».
Далее описан режим высокого разрешения со ссылкой на Фиг.2C и 2D.
Диаметр луча задается равным 4 мм, а глубина резкости (DOF) задается равной 0,1 мм. Допустим, что положение G затвора приблизительно совмещено с поверхностью измеряемого объекта, и положение фокусировки регулируется, чтобы предоставлять диапазон 0,1 мм от поверхности измеряемого объекта в глубину.
Когда структура измеряемого объекта, который должен получаться при высоком разрешении, присутствует только около глубины резкости (DOF), или, другими словами, когда информация глубоко в направлении по оси Z не должна получаться, то нет необходимости считывать все пикселы линейного датчика.
В таком случае линейный датчик считывается посредством прореживания каждого второго пиксела, как проиллюстрировано на Фиг.3B. Соответственно время считывания может уменьшаться.
Другими словами, время обнаружения одного сканирования A-типа уменьшается.
Когда линейный датчик прореживается и считывается, и число пикселов прореживается до 512 считанных пикселов, то оптическое расстояние Dep512 формирования изображений=1,8 мм>глубина резкости (DOF)=0,1 мм, что означает то, что формирование изображений может выполняться для информации по измеряемому объекту на глубине резкости (DOF) в этом режиме.
Помимо этого, таким же образом, как в режиме низкого разрешения, описанном ранее, например, то, когда имеется неоднородность на измеряемом объекте, и положение G затвора должно отделяться от поверхности измеряемого объекта, формирование изображений может выполняться без влияния посредством зеркального изображения в рамках условия «оптическое расстояние Dep512 формирования изображений=1,8 мм>(глубина резкости (DOF)+расстояние от положения затвора до поверхности измеряемого объекта)».
Конфигурации линейного датчика 139-1, когда прореживание должно выполняться, включают в себя конфигурацию, в которой, как описано выше, подготавливаются два регистра, и совмещенные пикселы поочередно соединены, посредством чего считывание выполняется только из одного регистра (например, регистра, с которым соединяются нечетные пикселы) в ходе прореживания.
Поскольку режим высокого разрешения допускает сокращение числа пикселов, которые должны считываться для сканирования A-типа, время формирования изображений измеряемого объекта при получении и комбинировании большого числа сканирований A-типа в режиме высокого разрешения при сканировании A-типа может уменьшаться по сравнению со считыванием всех 1024 пикселов.
Чтобы обнаруживать сканирования A-типа с еще большими скоростями, считывание может выполняться посредством прореживания двух последовательных или трех последовательных пикселов, которые должны считываться.
При этом число пикселов может быть числом, удовлетворяющим оптическому расстоянию Dep формирования изображений, определенному из взаимосвязи между глубиной резкости (DOF), определенной посредством диаметра луча, и глубиной исследуемого места.
Например, в примере, описанном выше, поскольку глубина составляет 0,1 мм для диаметра луча в 4 мм, когда формирование изображений должно выполняться до глубины 0,1 мм от положения затвора, прореживание трех последовательных пикселов приводит к 256 пикселам, которые должны считываться, для оптического расстояния Dep формирования изображений.
Поскольку оптическое расстояние формирования изображений Dep256 для 256 пикселов может вычисляться как 0,9 мм из выражения (3), измерения могут в достаточной мере выполняться только для 256 пикселов в зависимости от положения затвора и от того, как должен регулироваться диапазон глубины резкости (DOF).
Как показано, поскольку устройство формирования оптических томографических изображений согласно настоящему варианту осуществления содержит режим низкого разрешения и режим высокого разрешения, и диапазон фокусировки уменьшается в режиме высокого разрешения, диапазон направления глубины, который должен подвергаться формированию изображений, может быть сужен в зависимости от объекта, и число пикселов, которые должны считываться, может сокращаться.
Поскольку время, требуемое для обнаружения сканирования A-типа, может уменьшаться, более высокие скорости могут быть реализованы по сравнению со считыванием всех пикселов.
Помимо этого устройство формирования оптических томографических изображений согласно настоящему варианту осуществления является эффективным для создания сканирования B-типа, поскольку число пикселов, составляющих одно сканирование A-типа, которое формирует основу сканирования B-типа, уменьшается, и скорость обработки может увеличиваться.
Настоящий вариант осуществления не имеет намерение ограничивать диаметр луча, и, например, режим низкого разрешения может легко модифицироваться так, что диаметр луча задается равным 2 мм, и режим высокого разрешения может легко модифицироваться так, что диаметр луча задается равным 6 мм.
Второй вариант осуществления
Далее описано устройство формирования оптических томографических изображений для оптической когерентной томографии области Фурье согласно второму варианту осуществления со ссылкой на Фиг.1B.
В отличие от первого варианта осуществления настоящий вариант осуществления включает в себя множество модулей обнаружения, причем каждый из модулей обнаружения имеет спектроскоп с различной конфигурацией.
В иных отношениях конфигурация устройства является аналогичной первому варианту осуществления. Соответственно описания перекрывающихся частей опускаются.
Во-первых, описана общая конфигурация полной оптической системы устройства формирования оптических томографических изображений согласно настоящему варианту осуществления.
Фиг.1B иллюстрирует устройство 200 формирования оптических томографических изображений, источник 201 света, расщепители 203 и 252 луча, опорный луч 205, измерительный луч 206, комбинированный луч (свет интерференции) 243, глаз 207 для проверки, отраженный луч 208 и одномодовое волокно 210.
Также проиллюстрированы линзы 211, 220, 235 и 236, зеркало 214, стекло 215 для компенсации дисперсии, каскад 217 с электроприводом, X-Y-сканер 219 и персональный компьютер 225.
Фиг.1B также иллюстрирует роговицу 226, сетчатку 227 глаза, регулируемый расширитель 236 луча, который является модулем изменения диаметра луча, спектроскопы 250 и 251, линейные камеры 238 и 239, модуль 240 захвата изображений и пропускающие решетки 241 и 242.
OCT-устройство 200 согласно настоящему варианту осуществления является идентичным OCT-устройству в первом варианте осуществления до тех пор, пока свет 243 интерференции не комбинируется.
Свет 243 интерференции расщепляется посредством расщепителя 252 луча, посредством чего часть разделенного света направляется в спектроскоп 250, а другая часть направляется в спектроскоп 251. Общие операции каждого спектроскопа являются аналогичными первому варианту осуществления.
Используется источник света, аналогичный первому варианту осуществления. SLD имеет длину волны в 840 нм и ширину спектра в 50 нм.
Помимо этого регулируемый расширитель 236 луча отвечает за варьирование диаметра луча для измерительного луча 206.
Регулируемый расширитель 236 луча может варьировать диаметр луча на 1-4 мм.
Аналогично в настоящем варианте осуществления диаметр луча задается равным 1 мм в режиме низкого разрешения и 4 мм в режиме высокого разрешения.
Следовательно, значения соответствующих глубин резкости (DOF) и разрешений являются идентичными значениям в первом варианте осуществления.
Кроме того, оптические пути измерительного луча и опорного луча являются идентичными оптическим путям в первом варианте осуществления.
Далее описана конфигурация системы измерения в OCT-устройстве согласно настоящему варианту осуществления.
Комбинированный луч 243 расщепляется посредством расщепителя 252 луча и соответственно направляется в спектроскопы 250 и 251.
В этом случае спектроскоп 250 является спектроскопом для режима низкого разрешения, а спектроскоп 251 является спектроскопом для режима высокого разрешения.
Лучи, падающие на соответствующие спектроскопы 250 и 251, разделяются на каждую длину волны посредством пропускающих решеток 241 и 242, концентрируются посредством линз 235-2 и 236-2, и сила света преобразуется в напряжение посредством линейных камер 238 и 239 для каждого положения (длины волны).
При этом линейная камера 238 управляется в режиме низкого разрешения, а линейная камера 239 управляется в режиме высокого разрешения.
В частности, интерференционные полосы области спектра на оси длины волны должны наблюдаться относительно линейных камер 238 и 239.
OCT-устройство выполнено и регулируется таким образом, что 50-нанометровый разделенный луч, с помощью которого линзы 235-2 и 236-2 формируют изображение в линейных датчиках линейных камер 238 и 239, приблизительно соответствует числу пикселов линейных датчиков, которые должны считываться посредством линейных камер.
В отличие от первого варианта осуществления каждый линейный датчик содержит только один регистр.
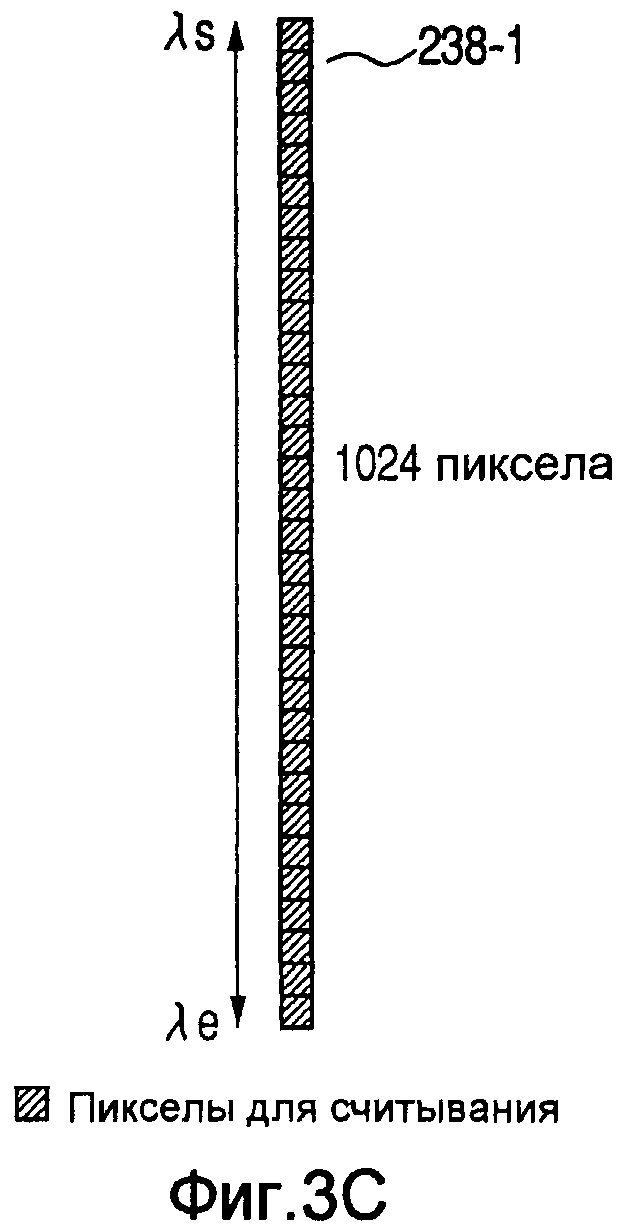
В частности, в спектроскопе 250 ширина спектра 50-нанометрового разделенного луча формирует изображение с шириной, соответствующей 1024 пикселам датчика в линейной камере 238.
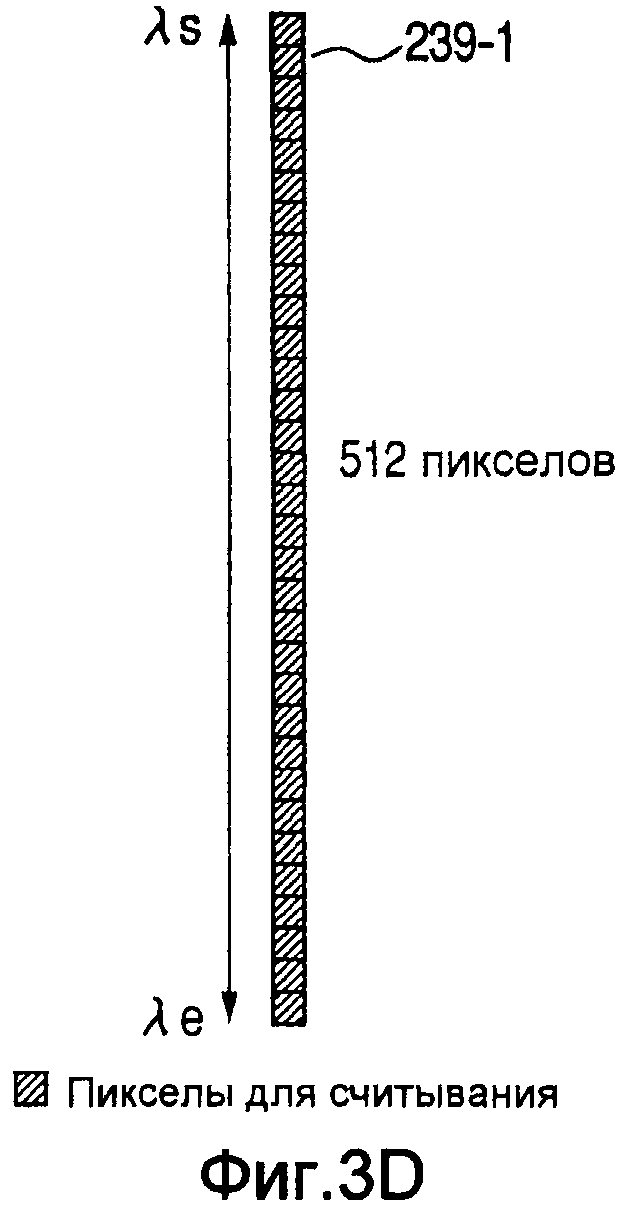
Фиг.3C схематично иллюстрирует линейный датчик 238-1. Разделенные лучи в рамках от λs (815 нм) до λe (865 нм) формируют изображение в линейном датчике 238-1. Помимо этого в спектроскопе 251 ширина спектра 50-нанометрового разделенного луча формирует изображение с шириной, соответствующей 512 пикселам датчика в линейной камере 239.
Фиг.3D схематично иллюстрирует линейный датчик 239-1. Разделенные лучи в рамках от λs (815 нм) до λe (865 нм) формируют изображение в линейном датчике 239-1. Каждый спектроскоп может варьировать отношение между шириной спектра и числом пикселов линейного датчика посредством варьирования любого из фокусного расстояния линзы, шага пропускающей решетки и ширины одного пиксела самого линейного датчика или варьирования комбинации вышеозначенного.
Модуль 240 захвата изображений преобразует группу сигналов напряжения, полученных из линейной камеры 238 в режиме низкого разрешения и из линейной камеры 239 в режиме высокого разрешения, в цифровые значения и выполняет обработку данных в персональном компьютере 225, чтобы формировать томографическое изображение.
В этом случае линейная камера 239 может получать силу света комбинированного луча 243 для каждой длины волны.
Поскольку способ получения томографического изображения является идентичным способу в первом варианте осуществления, его описание опускается. Оптическое расстояние формирования изображений для каждого режима является идентичным оптическому расстоянию в первом варианте осуществления.
Что касается взаимосвязи между расстоянием затвора и глубиной резкости (DOF), операции в режиме низкого разрешения являются идентичными операциям в первом варианте осуществления, и их описание опускается.
Далее описан режим высокого разрешения согласно настоящему варианту осуществления.
Основное взаимное расположение между положением затвора и диапазоном глубины резкости (DOF) является идентичным основному взаимному расположению в первом варианте осуществления.
Диаметр луча задается равным 4 мм, а глубина резкости (DOF) задается равной 0,1 мм. Допустим, что положение G затвора приблизительно совмещено с поверхностью измеряемого объекта, и положение фокусировки регулируется, чтобы предоставлять диапазон 0,1 мм от поверхности измеряемого объекта в глубину.
Поскольку линейный датчик 239-1 спектроскопа 251, выбираемый в режиме высокого разрешения, имеет 512 пикселов, оптическое расстояние Dep512 формирования изображений=1,8 мм>глубина резкости (DOF)=0,1 мм, что означает то, что формирование изображений может выполняться для информации по измеряемому объекту на глубине резкости (DOF) в этом режиме.
Помимо этого, таким же образом, как в режиме низкого разрешения, описанном ранее, например, то, когда имеется неоднородность на измеряемом объекте, и положение G затвора должно отделяться от поверхности измеряемого объекта, формирование изображений может выполняться без влияния посредством зеркального изображения в рамках условия «оптическое расстояние Dep512 формирования изображений=1,8 мм>(глубина резкости (DOF)+расстояние от положения затвора до поверхности измеряемого объекта)».
Поскольку режим высокого разрешения допускает сокращение числа пикселов, которые должны считываться для сканирования A-типа, время формирования изображений измеряемого объекта при получении и комбинировании большого числа сканирований A-типа в режиме высокого разрешения при сканировании A-типа может уменьшаться по сравнению со считыванием всех пикселов.
Как показано, устройство формирования оптических томографических изображений согласно настоящему варианту осуществления содержит режим низкого разрешения и режим высокого разрешения, и спектроскоп, предоставленный посредством линейного датчика, имеющего меньшее число пикселов, которые должны считываться, может выбираться в режиме высокого разрешения.
Когда спектроскоп выбирается, поскольку время, требуемое, чтобы обнаруживать сканирование A-типа, может уменьшаться вследствие уменьшения времени считывания датчика, более высокие скорости могут достигаться.
Настоящий вариант осуществления не имеет намерение ограничивать диаметр луча, и способом, идентичным первому варианту осуществления, например, режим низкого разрешения может модифицироваться так, что диаметр луча задается равным 2 мм, и режим высокого разрешения может модифицироваться так, что диаметр луча задается равным 6 мм.
Третий вариант осуществления
Далее описано устройство формирования оптических томографических изображений для оптической когерентной томографии области Фурье согласно третьему варианту осуществления со ссылкой на Фиг.4A-4E.
По сравнению с первым вариантом осуществления настоящий вариант осуществления приспосабливает способ зональной фокусировки, в котором в режиме высокого разрешения положения фокусировки изменяются постепенно, и множество изображений сканирования B-типа, полученных в соответствующих положениях, комбинируется.
Соответственно может быть реализована конфигурация, в которой томографическое изображение, обнаруженное в течение небольшой глубины резкости (DOF) в режиме высокого разрешения, может получаться в более глубоком положении.
В иных отношениях конфигурация устройства является аналогичной первому варианту осуществления. По сути, описания перекрывающихся частей опускаются.
Во-первых, описана общая конфигурация полной оптической системы устройства формирования оптических томографических изображений согласно настоящему варианту осуществления.
Фиг.4A иллюстрирует устройство 300 формирования оптических томографических изображений, источник 301 света, расщепитель 303 луча, опорный луч 305, измерительный луч 306, комбинированный луч 342, глаз 307 для проверки, отраженный луч 308 и одномодовое волокно 310.
Также проиллюстрированы линзы 311, 320 и 335, зеркало 314, стекло 315 для компенсации дисперсии, каскад 317 с электроприводом, X-Y-сканер 319 и персональный компьютер 325.
Фиг.4A также иллюстрирует роговицу 326, сетчатку глаза 327, регулируемый расширитель 336 луча, который является модулем изменения диаметра луча, спектроскоп 350, линейную камеру 339, модуль 340 захвата изображений и пропускающие решетки 341.
Операции устройства 300 формирования оптических томографических изображений согласно настоящему варианту осуществления в режиме низкого разрешения являются идентичными операциям в первом варианте осуществления.
В ходе операции формирования изображений в режиме высокого разрешения линза 320-2 перемещается посредством точных шаговых величин посредством каскада 317-2 с электроприводом, который является модулем управления для управления положениями линзы 320-2, которая составляет модуль концентрирования.
Вместе с шаговым перемещением линзы 320-2 зеркало 314-1 опорного луча также перемещается с точными шагами посредством каскада 317-1 с электроприводом, который является модулем управления для управления положением зеркала опорного луча. Величины перемещения линзы 320-2 и зеркала 314-1 опорного луча описаны ниже.
Используется источник света, аналогичный первому варианту осуществления. SLD имеет длину волны в 840 нм и ширину спектра в 50 нм.
Помимо этого регулируемый расширитель 336 луча отвечает за варьирование диаметра луча для измерительного луча 306. Регулируемый расширитель 236 луча может варьировать диаметр луча на 1-4 мм.
В настоящем варианте осуществления диаметр луча задается равным 1 мм в режиме низкого разрешения и 2 мм в режиме высокого разрешения.
Следовательно, значения глубины резкости (DOF) и разрешения в режиме низкого разрешения являются идентичными значениям в первом варианте осуществления. Глубина резкости (DOF) в режиме высокого разрешения, NAd=2mm, может вычисляться из NA=d/(2•f) как 0,044 и как приблизительно ±0,3 мм (диапазон глубины резкости (DOF) в 0,6 мм) с помощью выражения (2). Помимо этого разрешение Rxyd=2mm может вычисляться как приблизительно 10 мкм.
Кроме того, оптические пути измерительного луча и опорного луча являются идентичными оптическим путям в первом варианте осуществления.
Конфигурация системы измерения является идентичной конфигурации в первом варианте осуществления. Прореживание и считывание пикселов в линейном датчике 339-1 линейной камеры 339 в режиме высокого разрешения выполняются аналогично.
Следовательно, конфигурация регистра в линейном датчике также является идентичной конфигурации в первом варианте осуществления.
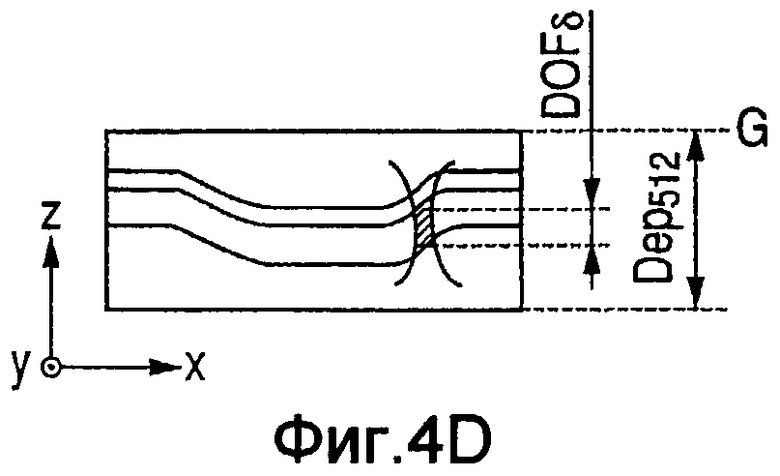
Взаимосвязь между операцией зональной фокусировки в режиме высокого разрешения и оптическим расстоянием Dep512 формирования изображений далее описывается со ссылкой на Фиг.4B-4D.
В режиме высокого разрешения зональная фокусировка работает в четырех каскадах, чтобы загружать изображения сканирования B-типа, после чего следует формирование изображений, которое заключает в себе комбинирование изображений.
Фиг.4B-4D иллюстрируют положение G затвора и диапазон DOFh глубины резкости (DOF) каждого каскада зональной фокусировки.
Фиг.4B иллюстрирует состояние для первого состояния зональной фокусировки, в котором линза 320-2 должна регулироваться так, что DOFh размещается около поверхности сетчатки глаза, которая является измеряемым объектом.
Между тем, зеркало 314-1 должно перемещаться и регулироваться так, что положение G затвора расположено выше DOFh.
Обычное изображение сканирования B-типа обнаруживается в этом положении и сохраняется в запоминающем устройстве (не показано) в персональном компьютере 325.
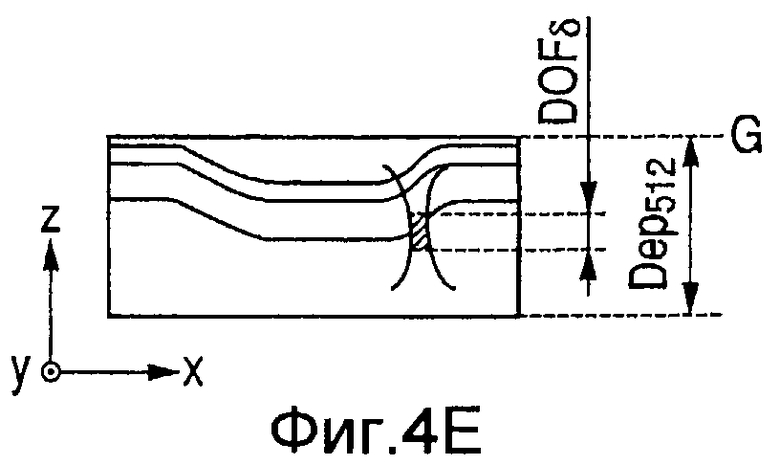
В следующем состоянии зональной фокусировки, как проиллюстрировано на Фиг.4C, диапазон DOFh глубины резкости (DOF) и положение G затвора перемещаются одновременно.
При этом диапазон DOFh глубины резкости (DOF) перемещается на 0,5 мм, что на 0,1 мм меньше длины в 0,6 мм DOFh, в направлении по оси Z посредством перемещения линзы 320-2, вызываемого посредством каскада 317-2 с электроприводом.
Положение затвора перемещается соответственно посредством перемещения зеркала 314-1 опорного луча на 0,5 мм посредством каскада 317-1 с электроприводом. Сканирование B-типа обнаруживается в этом состоянии.
Расстояние перемещения задается меньше диапазона глубины резкости (DOF), чтобы повышать точность при комбинировании обнаруженных изображений посредством использования изображений высокой четкости на глубине резкости (DOF)
как изображений в перекрывающейся части.
В следующем состоянии зональной фокусировки, аналогично, диапазон DOFh глубины резкости (DOF) и положение G затвора соответственно перемещаются на 0,5 мм, чтобы обнаруживать сканирование B-типа.
Из этих четырех изображений сканирования B-типа полный диапазон глубины резкости (DOF) вследствие четырехступенчатого перемещения составляет 2 мм.
Эти четыре изображения сканирования B-типа комбинируются согласно расстоянию перемещения зональной фокусировки на персональном компьютере 325, чтобы получать изображение с широким диапазоном в направлении по оси Z при высоком разрешении по горизонтали.
Перемещение положения G затвора вместе с регулированием диапазона глубины резкости (DOF) является существенным, поскольку длина в направлении по оси Z в 2 мм изображения, которое должно получаться посредством зональной фокусировки, превышает оптическое расстояние Dep512 формирования изображений=1,8 мм для считывания 512 пикселов.
Помимо этого типично в OCT области Фурье, чем дальше от положения затвора, тем ниже полученная интенсивность сигнала.
Когда расстояние от положения G затвора до диапазона глубины резкости (DOF) является идентичным при обнаружении сканирования B-типа в каждом каскаде зональной фокусировки, преимущество получается с точки зрения интенсивности сигнала, а не с точки зрения условия для фиксации положений затвора.
В этом случае посредством сокращения числа пикселов до 512 в режиме высокого разрешения, в дополнение к более высокой скорости считывания по сравнению со считыванием 1024 пикселов, способом, идентичным первому варианту осуществления, более высокая скорость обработки также может достигаться.
Другими словами, достигается более высокая скорость обработки, поскольку изображения сканирования B-типа, соответствующие одному каскаду зональной фокусировки при комбинировании сканирований B-типа, полученных через зональную фокусировку, являются меньшими.
Как описано выше, устройство формирования оптических томографических изображений согласно настоящему варианту осуществления содержит режим низкого разрешения и режим высокого разрешения и использует способ зональной фокусировки в режиме высокого разрешения.
Следовательно, пикселы для считывания в ходе зональной фокусировки могут уменьшаться, что обеспечивает уменьшение времени, требуемого для того, чтобы обнаруживать сканирование A-типа, что, в свою очередь, предоставляет возможность уменьшения времени, требуемого для того, чтобы обнаруживать сканирование B-типа.
Кроме того, достигается более высокая скорость обработки, поскольку изображения сканирования B-типа, соответствующие одному каскаду зональной фокусировки при комбинировании сканирований B-типа, полученных через зональную фокусировку, являются меньшими. Кроме того, настоящий вариант осуществления не имеет намерение ограничивать диаметр луча, и способом, идентичным первому варианту осуществления, например, режим низкого разрешения может модифицироваться так, что диаметр луча задается равным 2 мм, и режим высокого разрешения может модифицироваться так, что диаметр луча задается равным 4 мм.
Четвертый вариант осуществления
Далее описано устройство формирования оптических томографических изображений для оптической когерентной томографии области Фурье согласно четвертому варианту осуществления со ссылкой на Фиг. 5A и 5B.
Настоящий вариант осуществления отличается от третьего варианта осуществления в том, как спектроскоп сконфигурирован и выполнен, так что ширина длины волны в расчете на пиксел матрицы элементов оптоэлектрического преобразования варьируется посредством линзы с переменным фокусным расстоянием, чтобы формировать изображение в матрице элементов оптоэлектрического преобразования.
Томографическое изображение реализовано так, чтобы формироваться из данных пикселов в диапазоне формируемого изображения.
В иных отношениях конфигурация устройства является аналогичной третьему варианту осуществления. Соответственно описания перекрывающихся частей опускаются.
Фиг.5A-5D иллюстрируют спектроскоп 450, пропускающую решетку 441 и линзы 435-2 и 435-3. Эти две линзы комбинируются, чтобы формировать линзу с переменным фокусным расстоянием.
Фиг.5A-5D также иллюстрируют линейную камеру 439.
Операции устройства формирования оптических томографических изображений в режиме низкого разрешения и в режиме высокого разрешения являются идентичными за исключением части спектроскопа.
Другими словами, регулирование диапазона глубины резкости (DOF), регулирование положения затвора, процедура зональной фокусировки для обнаружения сканирования B-типа посредством варьирования положения диапазона глубины резкости (DOF) в каскадах и т.п. в режиме высокого разрешения являются одинаковыми.
Используется источник света, аналогичный первому варианту осуществления. SLD имеет длину волны в 840 нм и ширину спектра в 50 нм.
С помощью переменного расширителя диаметр луча задается равным 1 мм в режиме низкого разрешения и 2 мм в режиме высокого разрешения.
Следовательно, значения глубины резкости (DOF) и разрешения каждого режима являются идентичными значениям в третьем варианте осуществления. Кроме того, оптические пути измерительного луча и опорного луча являются идентичными оптическим путям в первом варианте осуществления.
Операции спектроскопа далее описываются со ссылкой на Фиг.5A, 5B, 6A и 6B.
Во-первых, описано состояние спектроскопа в режиме низкого разрешения.
Таким же образом, как в вариантах осуществления с первого по третий, комбинированный луч направляется в спектроскоп 450.
В режиме низкого разрешения, как проиллюстрировано на Фиг. 5A, линзы 435-2 и 435-3 регулируются как линза с переменным фокусным расстоянием для длиннофокусного состояния.
Комбинированный луч, разделяемый на каждую длину волны посредством пропускающей решетки 441, концентрируется посредством линз 435-2 и 435-3.
Соответствующие линзы 435-2 и 435-3 регулируются как линза с переменным фокусным расстоянием так, что изображение формируется в линейном датчике 439-1 в линейной камере 439, и разделенный луч ширины спектра на 50 нм соответствует числу пикселов в линейном датчике.
В частности, как проиллюстрировано на Фиг.6A, 50-нанометровый разделенный луч формирует изображение с шириной, соответствующей 1024 пикселам датчика в линейной камере 439.
Фиг.6A схематично иллюстрирует линейный датчик 439-1. Разделенные лучи в рамках от λs (815 нм) до λe (865 нм) формируют изображение в линейном датчике 439-1. Это состояние спектроскопа является аналогичным третьему варианту осуществления.
Далее описано состояние спектроскопа в режиме высокого разрешения.
В режиме высокого разрешения, как проиллюстрировано на Фиг. 5B, линзы 435-2 и 435-3 регулируются как линза с переменным фокусным расстоянием для короткофокусного состояния.
Соответственно свет, разделенный на каждую длину волны посредством пропускающей решетки 441, или, другими словами, свет с шириной спектра в 50 нм формирует изображение по ширине, соответствующей 512 пикселам, как проиллюстрировано на Фиг.6B.
В то время, когда данные, соответствующие 1024 пикселам, считываются в ходе считывания, данные, соответствующие 512 пикселам, используются при выполнении обработки, такой как FFT для структурирования изображения сканирования B-типа в каждом положении глубины резкости (DOF), и при комбинировании соответствующих сканирований B-типа. Другими словами, используются только данные пикселов, соответствующих изображению, формируемому посредством комбинированного луча в матрице элементов оптоэлектрического преобразования.
Соответственно время, требуемое для структурирования изображения в режиме высокого разрешения, может уменьшаться. Вместе с тем, поскольку возникает меньше потерь количества света комбинированного луча по сравнению с прореживанием и считыванием линейного датчика в третьем варианте осуществления, контрастность полученного изображения увеличивается.
Кроме того, матрица элементов оптоэлектрического преобразования может подвергаться разделению на области и размещаться так, что данные пикселов, по меньшей мере, в одной разделенной области могут считываться независимо от других разделенных областей.
В частности, например, посредством предоставления заранее в линейном датчике 439-1 регистра так, что считывание из 512 пикселов в центральной части может выполняться независимо, только 512 пикселов центральной части линейного датчика 439-1 могут быть выполнены с возможностью считываться в режиме высокого разрешения.
При этом в дополнение к ускорению формирования изображений нет необходимости считывать данные, соответствующие 1024 пикселам. Следовательно, время считывания линейного датчика может уменьшаться, и может достигаться дополнительное уменьшение времени формирования изображений.
Как описано выше, в настоящем варианте осуществления отсутствие потерь количества света в ходе формирования изображений в режиме высокого разрешения с использованием зональной фокусировки приводит к более высокой контрастности изображения и меньшему времени формирования изображений.
Настоящий вариант осуществления не имеет намерение ограничивать диапазон формирования изображений посредством линзы с переменным фокусным расстоянием 1024 или 512 пикселами, и, например, 256 пикселов и т.п. могут свободно выбираться.
Помимо этого, хотя возможно, что положение формирования изображения смещается вследствие операции изменения масштаба линзы относительно линейного датчика, в таком случае может быть предусмотрен механизм для автоматического или ручного регулирования взаимного расположения между линейным датчиком и линзой в зависимости от режима.
Пятый вариант осуществления
Далее описано устройство формирования оптических томографических изображений для оптической когерентной томографии области Фурье согласно пятому варианту осуществления со ссылкой на Фиг.5C и 5D.
Настоящий вариант осуществления отличается от четвертого варианта осуществления конфигурацией спектроскопа.
В иных отношениях конфигурация устройства является аналогичной четвертому варианту осуществления. Соответственно описания перекрывающихся частей опускаются.
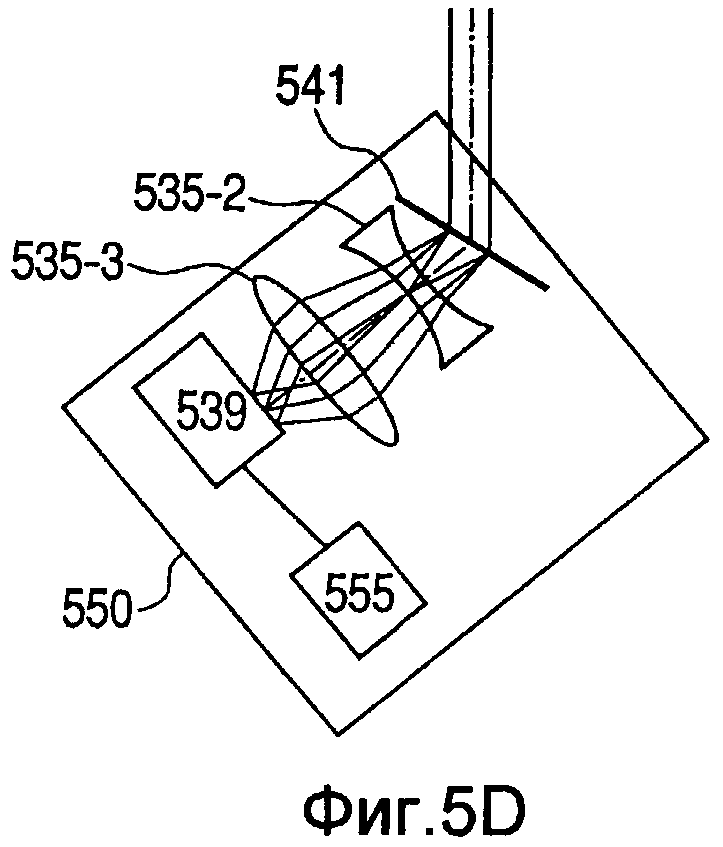
Фиг.5C и 5D иллюстрируют спектроскоп 550, пропускающую решетку 541 и линзы 535-2 и 535-3. Эти две линзы комбинируются, чтобы формировать линзу с переменным фокусным расстоянием.
Фиг.5C и 5D также иллюстрируют линейную камеру 539 и линейный исполнительный механизм 555 перемещения камеры, который перемещает положения линейной камеры 539 и линзы 535-2 и 535-3 относительно друг друга.
Операции устройства формирования оптических томографических изображений согласно настоящему варианту осуществления в режиме низкого разрешения и в режиме высокого разрешения являются идентичными операциям в третьем и четвертом вариантах осуществления за исключением части спектроскопа.
Другими словами, регулирование диапазона глубины резкости (DOF), регулирование положения затвора и процедура для обнаружения сканирования B-типа посредством варьирования положения диапазона глубины резкости (DOF) в каскадах в режиме высокого разрешения являются одинаковыми.
Используется источник света, аналогичный первому варианту осуществления. SLD имеет длину волны в 840 нм и ширину спектра в 50 нм.
С помощью переменного расширителя диаметр луча задается равным 1 мм в режиме низкого разрешения и 2 мм в режиме высокого разрешения. Следовательно, значения глубины резкости (DOF) и значение диаметра светового пятна каждого режима являются идентичными значениям в третьем и четвертом вариантах осуществления.
Кроме того, оптические пути измерительного луча и опорного луча являются идентичными оптическим путям в первом варианте осуществления.
Операции спектроскопа далее описываются со ссылкой на Фиг.5C, 5D, 6C, 6D и 6E.
Во-первых, описано состояние спектроскопа в режиме низкого разрешения.
Таким же образом, как в вариантах осуществления с первого по третий, комбинированный луч направляется в спектроскоп 550.
В режиме низкого разрешения, как проиллюстрировано на Фиг.5C, линзы 535-2 и 535-3 регулируются как линза с переменным фокусным расстоянием для длиннофокусного состояния.
Помимо этого положения регулируются посредством линейного исполнительного механизма 555 перемещения камеры так, что центр линейного датчика в линейной камере 539 и оптическая ось линзы с переменным фокусным расстоянием, состоящего из линз 535-2 и 535-3, являются приблизительно совместимыми друг с другом.
Свет, разделяемый на каждую длину волны посредством пропускающей решетки 541, концентрируется посредством линз 535-2 и 535-3.
Соответствующие линзы 535-2 и 535-3 регулируются как линза с переменным фокусным расстоянием так, что свет с шириной спектра в 50 нм, который формирует изображение в линейном датчике 539-1 линейной камеры 539, соответствует числу пикселов в линейном датчике.
В частности, как проиллюстрировано на Фиг.6C, изображение формируется согласно ширине 1024 пикселов линейного датчика в линейной камере 539.
Фиг.6C схематично иллюстрирует линейный датчик 539-1. Разделенные лучи в рамках от λs (815 нм) до λe (865 нм) формируют изображение в линейном датчике 539-1. Это состояние спектроскопа является аналогичным четвертому варианту осуществления.
Далее описано состояние спектроскопа в режиме высокого разрешения.
В режиме высокого разрешения, как проиллюстрировано на Фиг.5D, линзы 535-2 и 535-3 регулируются как линза с переменным фокусным расстоянием для короткофокусного состояния.
Помимо этого положения регулируются посредством линейного исполнительного механизма 555 перемещения камеры так, что оптическая ось линзы с переменным фокусным расстоянием, состоящего из линз 535-2 и 535-3, является приблизительно совместимой с нижней стороной линейного датчика в линейной камере 539, как проиллюстрировано на Фиг.5D.
В частности, как проиллюстрировано на Фиг.6D, оптическая ось линзы с переменным фокусным расстоянием приблизительно совместима с центром 683 пикселов на нижней стороне линейного датчика 539-1, как проиллюстрировано на схеме.
Соответственно свет, разделенный на каждую длину волны посредством пропускающей решетки 541, или, другими словами, свет в диапазоне на 50 нм формирует изображение по ширине, соответствующей 683 пикселам, как проиллюстрировано на Фиг.6D. В этом случае в линейном датчике 539-1 заранее предоставляется регистр, чтобы давать возможность выполнения считывания независимо для этих 683 пикселов, и в этом состоянии для 341 пиксела за пределами диапазона формирования изображений.
Следовательно, только обязательные 683 пиксела линейного датчика 539-1 считываются в состоянии, проиллюстрированном на Фиг.6D, в режиме высокого разрешения.
Соответственно, поскольку время считывания линейного датчика может уменьшаться, формирование изображений может выполняться за еще меньший период времени.
Кроме того, в режиме высокого разрешения положения линз 535-2 и 535-3 и линейной камеры могут регулироваться согласно состоянию формирования изображений, проиллюстрированному на Фиг.6E.
При этом, хотя оптическое расстояние формирования изображений должно соответствовать 341 пикселу (1,2 мм из выражения (3)), такое оптическое расстояние формирования изображений может задаваться при выполнении более точной зональной фокусировки, чтобы дополнительно уменьшать время считывания линейного датчика.
Как описано выше, в настоящем варианте осуществления отсутствие потерь количества света в ходе формирования изображений в режиме высокого разрешения с использованием зональной фокусировки приводит к более высокой контрастности изображения и меньшему времени формирования изображений. Вместе с тем посредством подвергания линейного датчика разделению на асимметричные области и перемещения положения формирования изображений линзы с переменным фокусным расстоянием, оптическое расстояние формирования изображений может различным образом варьироваться, и степень свободы выбора скоростей формирования изображений в режиме высокого разрешения может увеличиваться.
Другие варианты осуществления
Аспекты настоящего изобретения также могут быть реализованы посредством компьютера системы или устройства (либо устройств, такие как CPU или MPU), который считывает и выполняет программу, записанную на запоминающем устройстве, чтобы выполнять функции вышеописанного варианта(ов) осуществления, и посредством способа, этапы которого выполняются посредством компьютера системы или устройства, например посредством считывания и выполнения программы, записанной на запоминающем устройстве, чтобы выполнять функции вышеописанного варианта(ов) осуществления. С этой целью программа предоставляется в компьютер, например, через сеть или с носителя записи различных типов, выступающего в качестве запоминающего устройства (например, машиночитаемого носителя).
Хотя настоящее изобретение описано со ссылкой на примерные варианты осуществления, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации так, чтобы охватывать все такие модификации и эквивалентные структуры и функции.

















Изобретение относится к устройствам формирования оптических томографических изображений и может быть использовано, в частности, в офтальмологической диагностике. Устройство включает модуль регулирования диаметра луча, выполненный с возможностью регулировать диаметр луча для измерительного луча, который должен направляться на объект; модуль обнаружения, включающий в себя спектроскопический модуль, модуль формирования изображений и матрицу элементов оптоэлектрического преобразования и выполненный с возможностью обнаруживать комбинированный луч; и модуль изменения, выполненный с возможностью считывать сигнал из матрицы элементов оптоэлектрического преобразования на основе диаметра луча, регулируемого посредством модуля регулирования диаметра луча, и изменять отношение числа пикселов, используемых для формирования изображений, к ширине спектра длин волн источника света. Технический результат - обеспечение режима низкого разрешения для приблизительного формирования изображений и режима высокого разрешения для получения детальных изображений, возможность формирования изображений в ходе режима высокого разрешения на высоких скоростях. 3 н. и 6 з.п. ф-лы, 28 ил.
1. Устройство формирования оптических томографических изображений, которое захватывает томографическое изображение объекта на основании комбинированного луча, комбинирующего отраженный луч от объекта, облучаемого измерительным лучом и опорным лучом, соответствующим измерительному лучу, при этом устройство формирования оптических томографических изображений содержит:
модуль варьирования диаметра луча, выполненный с возможностью варьировать диаметр луча для измерительного луча; и
спектроскопический модуль, выполненный с возможностью рассеивать комбинированный луч,
отличающееся
модулем изменения расстояния, выполненным с возможностью изменять расстояние, с которого должен излучаться рассеянный луч, на основе диаметра луча, варьируемого модулем варьирования диаметра луча; и
модулем обнаружения, выполненным с возможностью обнаруживать свет из модуля изменения расстояния.
2. Устройство формирования оптических томографических изображений по п.1, дополнительно содержащее:
первый модуль управления, выполненный с возможностью управлять положением опорного зеркала; и
второй модуль управления, выполненный с возможностью управлять положением модуля концентрирования, выполненного с возможностью побуждать измерительный луч концентрироваться на объекте,
при этом устройство формирования оптических томографических изображений использует первый и второй модули управления, чтобы управлять соответствующими положениями опорного зеркала и модуля концентрирования от начала до конца формирования изображений, чтобы выполнять формирование томографических изображений объекта.
3. Устройство формирования оптических томографических изображений по п.1, дополнительно содержащее модуль, выполненный с возможностью прореживать пикселы, которые должны считываться из матрицы элементов оптоэлектрического преобразования, причем модуль обнаружения включает в себя упомянутую матрицу элементов оптоэлектрического преобразования,
при этом устройство формирования оптических томографических изображений может выполнять формирование изображений при высоком разрешении с использованием большого диаметра луча, варьируемого модулем варьирования диаметра луча, при сокращении числа пикселов для считывания.
4. Устройство формирования оптических томографических изображений по п.1, содержащее множество модулей обнаружения,
при этом множество модулей обнаружения выполнены отлично друг от друга относительно отношения числа пикселов матрицы элементов оптоэлектрического преобразования к ширине спектра длин волн источника света, причем модули обнаружения включают в себя упомянутую матрицу элементов оптоэлектрического преобразования, и
при этом устройство формирования оптических томографических изображений может выбирать один любой из множества модулей обнаружения на основе диаметра луча, варьируемого модулем варьирования диаметра луча.
5. Устройство формирования оптических томографических изображений по п.1,
в котором модуль обнаружения включает в себя модуль формирования изображений, который состоит из линзы с переменным фокусным расстоянием, и
при этом устройство формирования оптических томографических изображений использует линзу с переменным фокусным расстоянием, чтобы изменять ширину длины волны в расчете на пиксел матрицы элементов оптоэлектрического преобразования на основе диаметра луча, варьируемого модулем варьирования диаметра луча, и побуждает изображение формироваться в матрице элементов оптоэлектрического преобразования и формирует томографическое изображение на основе данных пикселов в диапазоне формирования изображений.
6. Устройство формирования оптических томографических изображений по п.1,
в котором модуль обнаружения включает в себя модуль формирования изображений, который состоит из линзы с переменным фокусным расстоянием, и матрицу элементов оптоэлектрического преобразования, которая разделена на области, и
при этом устройство формирования оптических томографических изображений использует линзу с переменным фокусным расстоянием, чтобы изменять ширину длины волны в расчете на пиксел матрицы элементов оптоэлектрического преобразования на основе диаметра луча, варьируемого модулем варьирования диаметра луча, и побуждает изображение формироваться по меньшей мере в одной из разделенных областей, и
в котором данные пикселов в диапазоне формирования изображений могут считываться независимо от других разделенных областей.
7. Устройство формирования изображений по п.1, дополнительно содержащее модуль изменения положения, выполненный с возможностью изменять положение опорного зеркала на основе разности оптической длины пути между измерительным лучом и опорным лучом,
в котором модуль обнаружения выполнен с возможностью обнаруживать комбинированный луч при разрешении, соответствующем диаметру луча и положению.
8. Способ формирования изображений для устройства формирования оптических томографических изображений, которое захватывает томографическое изображение объекта на основе комбинированного луча, который комбинирует отраженный луч от объекта, облучаемого измерительным лучом и опорным лучом, соответствующим измерительному лучу,
причем диаметр луча для измерительного луча варьируется модулем варьирования диаметра луча упомянутого устройства, и
при этом комбинированный луч рассеивается спектроскопическим модулем,
при этом способ формирования изображения отличается этапами, на которых:
изменяют посредством модуля изменения расстояния расстояние, с которого должен излучаться рассеянный луч, на основе диаметра луча, варьируемого модулем варьирования диаметра луча; и
обнаруживают свет из модуля изменения расстояния.
9. Машиночитаемый носитель данных, на котором сохранена программа, которая побуждает компьютер осуществлять способ формирования изображений по п.8.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| EP 1870028 A1, 26.12.2007 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И УСТРОЙСТВО ДОСТАВКИ НИЗКОКОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2002 |
|
RU2242710C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ВНУТРЕННЕЙ СТРУКТУРЫ ОБЪЕКТОВ | 2000 |
|
RU2184347C2 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |

