По настоящей заявке испрашивается приоритет по предварительной заявке на патент США №60/956106, озаглавленной «BEAMFORMING FOR TDD IN LTE», поданной 15 августа 2007 г., которая принадлежит этому же правопреемнику, что и данная заявка, и включена здесь по ссылке.
I. Область техники, к которой относится изобретение
Настоящее изобретение относится, в основном, к связи и, более конкретно, к методам передачи данных в системе беспроводной связи.
II. Уровень техники
В системе беспроводной связи передатчик может использовать многочисленные (Т) передающие антенны для передачи данных на приемник, оснащенный многочисленными (R) приемными антеннами. Многочисленные передающие и приемные антенны образуют канал с многими входами и многими выходами (MIMO-канал), который может использоваться для увеличения пропускной способности и/или повышения надежности. Например, передатчик может передавать до Т потоков символов одновременно с Т передающих антенн для увеличения пропускной способности. Альтернативно, передатчик может передавать один поток символов со всех Т передающих антенн для улучшения приема приемником. В любом случае, желательно передавать данные так, чтобы достичь хороших рабочих характеристик.
Сущность изобретения
В данном документе описываются методы для посылки MIMO-передачи в системах беспроводной связи. Методы могут использоваться для систем дуплекса с частотным разделением (FDD) и дуплекса с временным разделением (TDD).
В одном методе передатчик может посылать первый опорный сигнал по первой линии связи. Передатчиком может быть узел В для передачи данных по нисходящей линии связи или пользовательское оборудование (UE) для передачи данных по восходящей линии связи. Передатчик может принимать информацию об индикаторе качества канала (CQI), определенную приемником, основываясь на первом опорном сигнале. Передатчик также может принимать второй опорный сигнал по второй линии связи от приемника. Передатчик может получать по меньшей мере одну матрицу MIMO-канала для первой линии связи, основываясь на втором опорном сигнале, принятом по второй линии связи. Передатчик может определять по меньшей мере одну матрицу предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала. Передатчик затем может посылать передачу данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI.
В другом методе передатчик может выполнять разложение по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов. Передатчик затем может определять по меньшей мере одной матрицу предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов. В другой разработке передатчик может формировать по меньшей мере одну матрицу псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала. Передатчик может выполнять QR-разложение по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов. Передатчик затем может определять по меньшей мере одну матрицу предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов.
Для передачи данных по нисходящей линии связи первый опорный сигнал может представлять собой характерный для соты опорный сигнал, посылаемый узлом В по нисходящей линии связи, и второй опорный сигнал может представлять собой зондирующий опорный сигнал, посылаемый посредством UE по восходящей линии связи. Для передачи данных по восходящей линии связи первый опорный сигнал может представлять собой зондирующий опорный сигнал, посылаемый посредством UE по восходящей линии связи, и второй опорный сигнал может представлять собой характерный для соты опорный сигнал, посылаемый узлом В по нисходящей линии связи. Опорный сигнал представляет собой сигнал, который известен априори как передатчику, так и приемнику. Опорный сигнал также может упоминаться как пилот-сигнал, преамбула, зондирование и т.д.
Различные аспекты и признаки изобретения описываются более подробно ниже.
Краткое описание чертежей
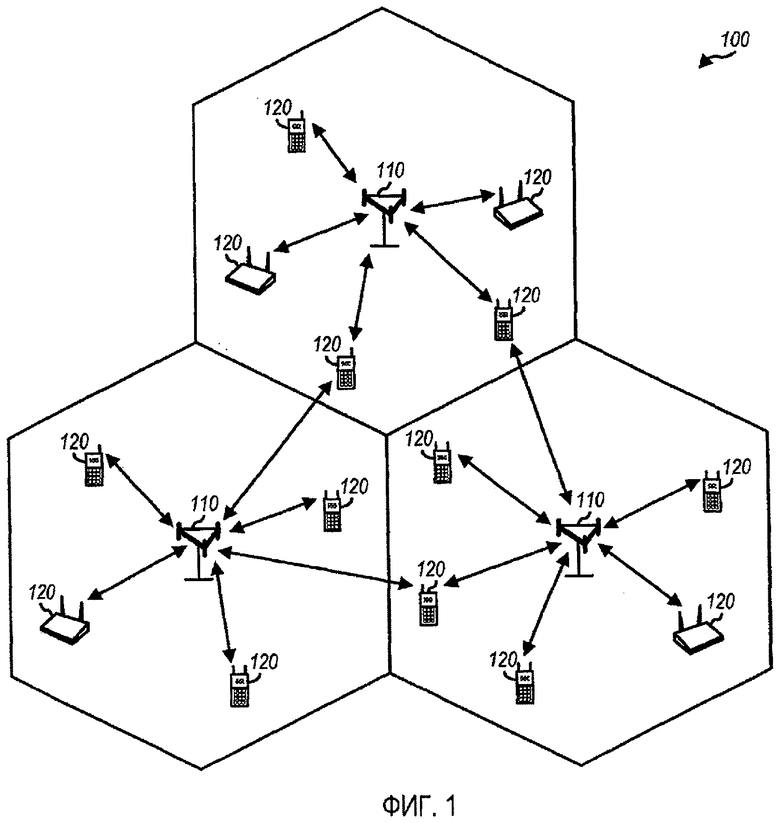
Фиг.1 изображает систему беспроводной связи.
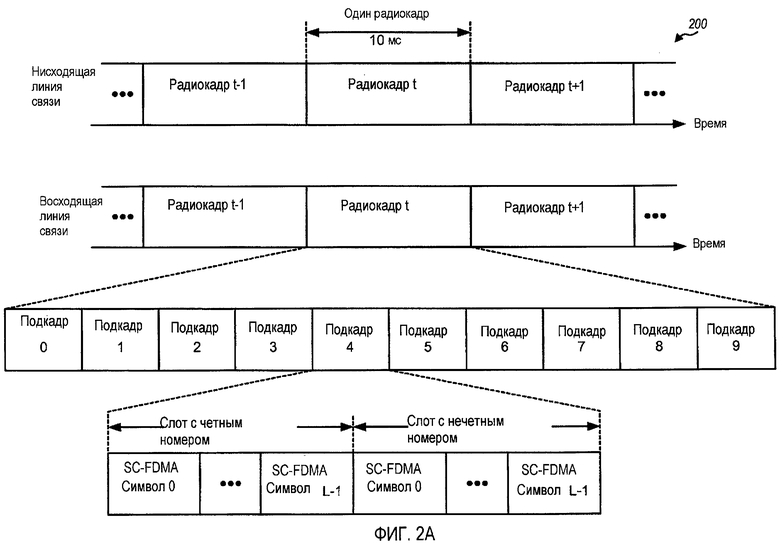
Фиг.2А изображает примерную структуру кадра для FDD.
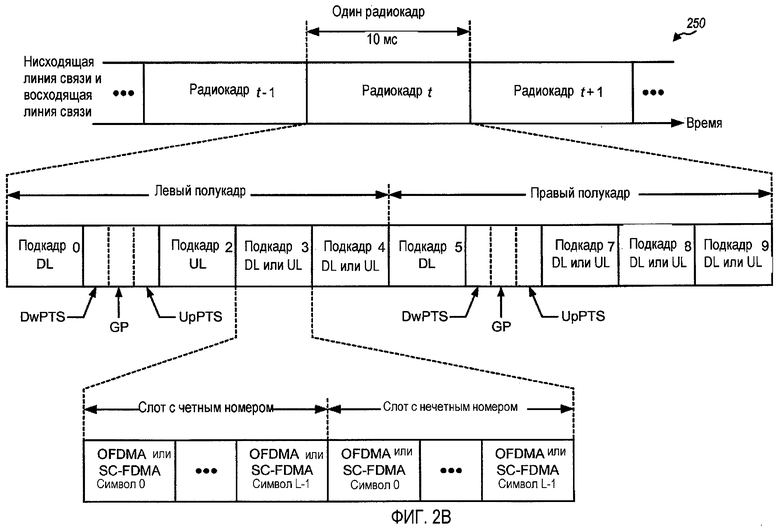
Фиг.2В изображает примерную структуру кадра для TDD.
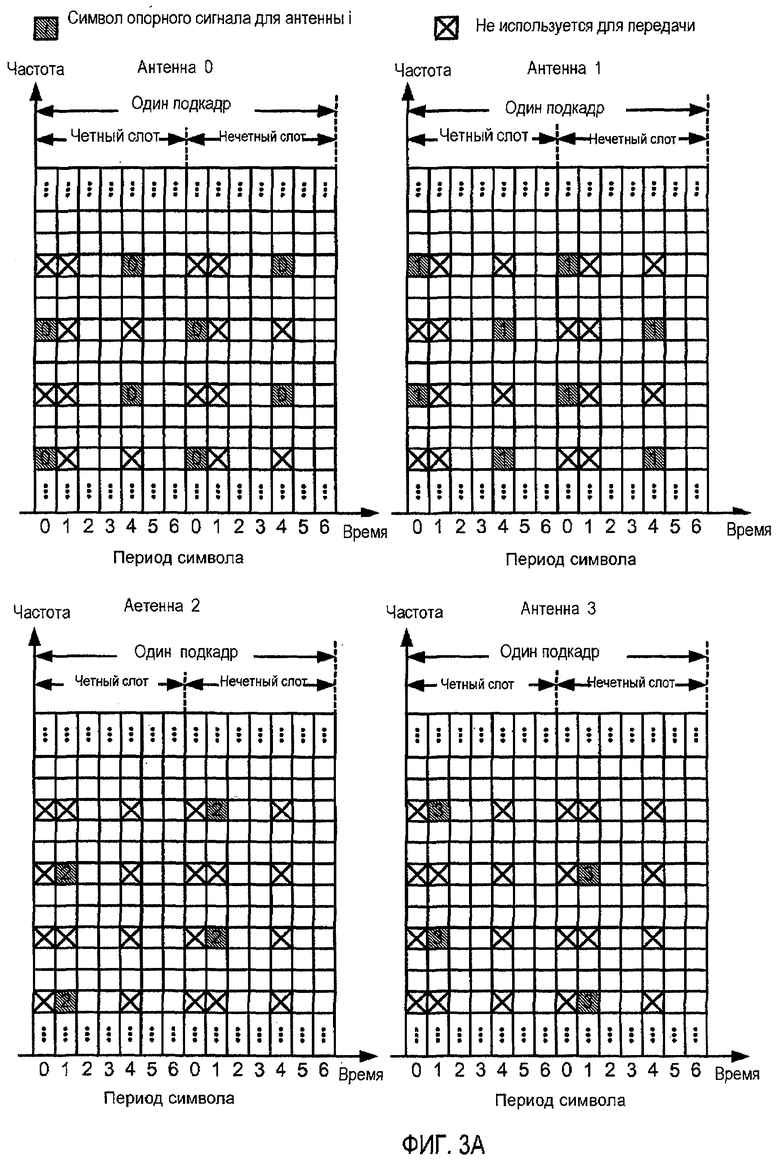
Фиг.3А изображает характерный для соты опорный сигнал, посылаемый узлом В.
Фиг.3В изображает зондирующий опорный сигнал, посылаемый посредством UE.
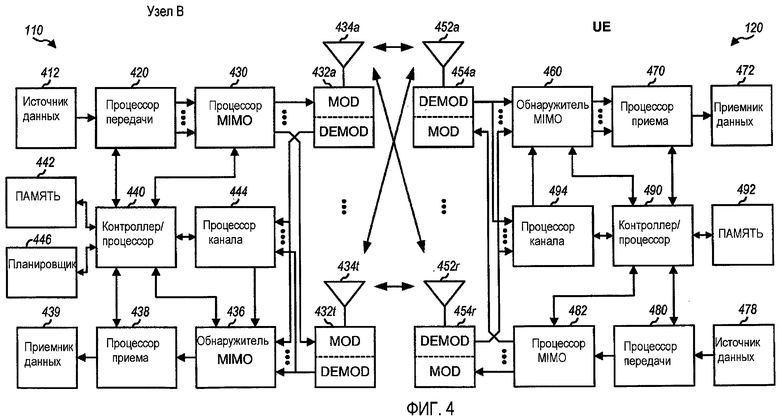
Фиг.4 изображает блок-схему узла В и UE.
Фиг.5 изображает процесс посылки MIMO-передачи.
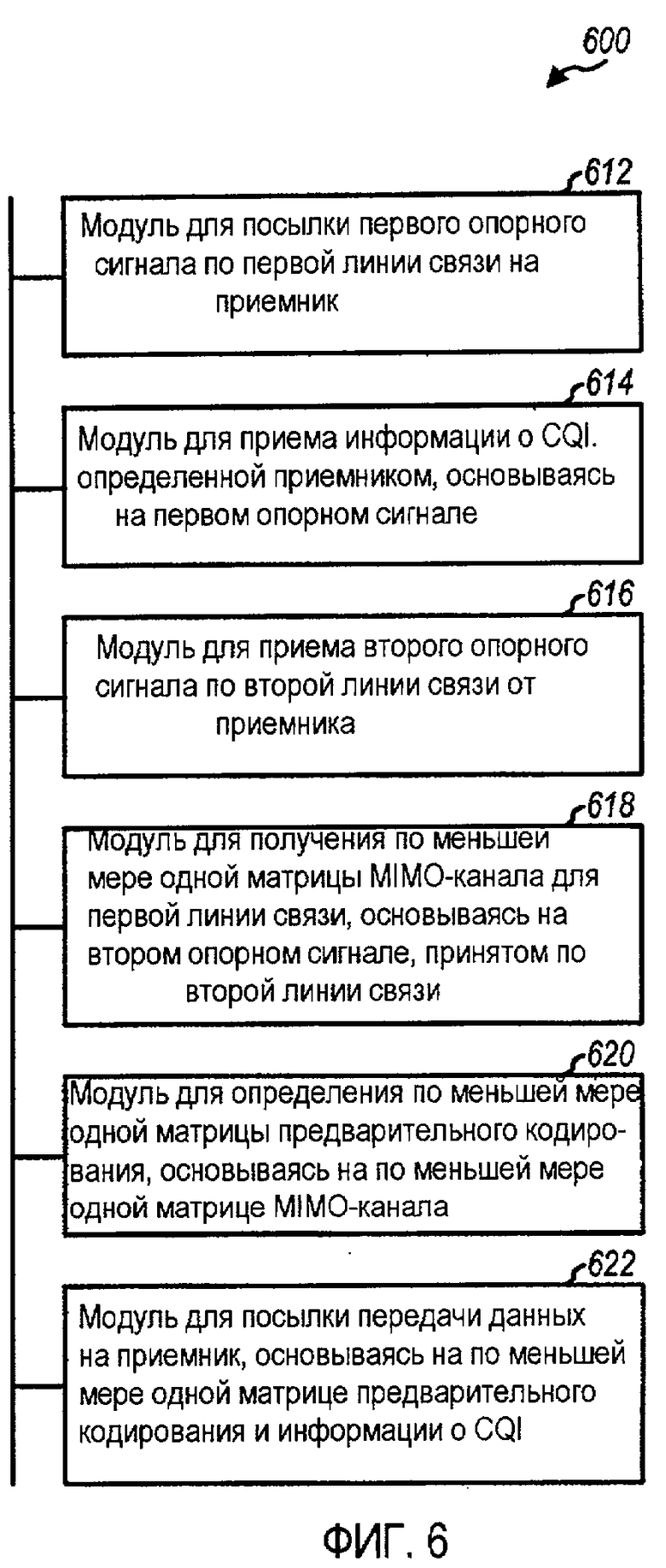
Фиг.6 изображает устройство для посылки MIMO-передачи.
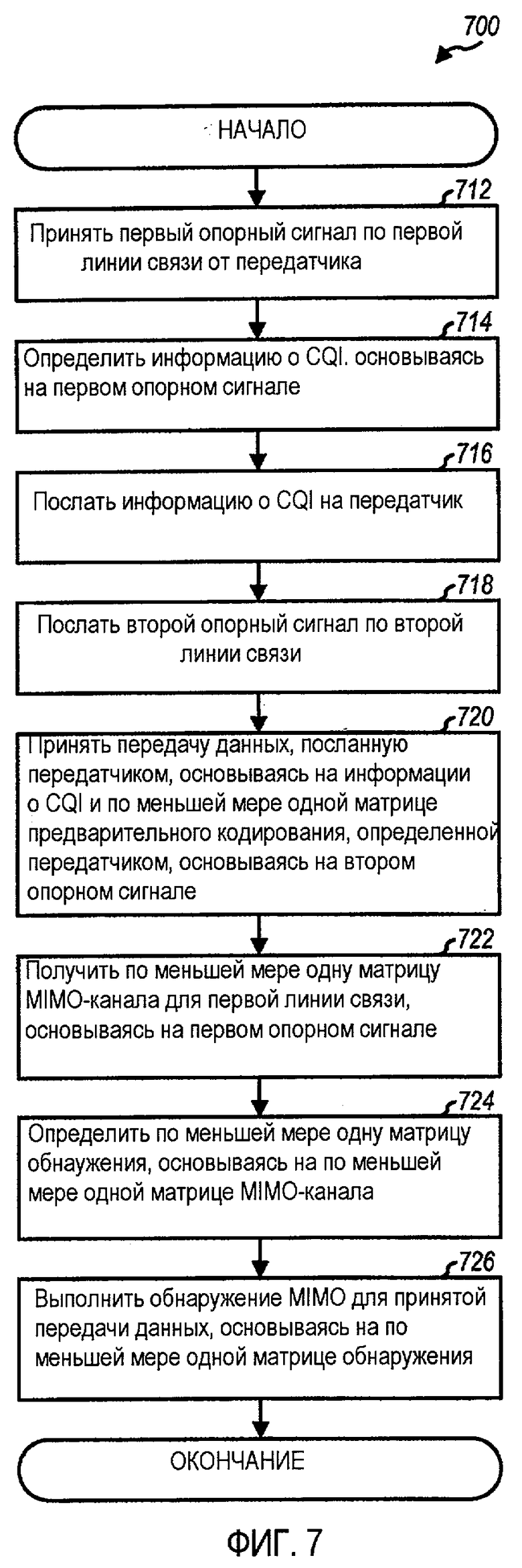
Фиг.7 изображает процесс приема MIMO-передачи.
Фиг.8 изображает устройство для приема MIMO-передачи.
Подробное описание
Методы, описанные в данном документе, могут использоваться для различных систем беспроводной связи, таких как системы многостанционного доступа с кодовым разделением каналов (CDMA), системы многостанционного доступа с временным разделением каналов (TDMA), системы многостанционного доступа с частотным разделением каналов (FDMA), системы многостанционного доступа с ортогональным частотным разделением каналов (OFDMA), системы FDMA на одной несущей (SC-FDMA) и другие системы. Термины «система» и «сеть» часто используются попеременно. Система CDMA может реализовать радиотехнологию, такую как универсальный наземный радиодоступ (UTRA), cdma2000 и т.п. UTRA включает в себя широкополосный CDMA (WCDMA) и другие варианты CDMA. cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. Система TDMA может реализовать радиотехнологию, такую как глобальная система мобильной связи (GSM). Система OFDMA может реализовать радиотехнологию, такую как эволюционированный UTRA (E-UTRA), ультрамобильная широкополосная сеть (UMB), IEEE 802.11 (Wi-Fi (беспроводная точность)), IEEE 802.16 (WiMAX (общемировая совместимость широкополосного беспроводного доступа)), IEEE 802.20, Flash-OFDM® (быстрый доступ с малым временем ожидания и бесшовным переходом между базовыми станциями на основе мультиплексирования с ортогональным разделением частот) и т.д. UTRA и E-UTRA являются частью универсальной системы мобильной связи (UMTS). Долгосрочная эволюция (LTE) Проекта партнерства по созданию системы третьего поколения (3GPP) представляет собой предстоящую версию UMTS, которая использует E-UTRA, который применяет OFDMA на нисходящей линии связи, и SC-FDMA - на восходящей линии связи. UTRA, E-UTRA, UMTS, LTE и GSM описаны в документах организации, названной «Проект партнерства по созданию системы 3-го поколения» (3GPP). cdma2000 и UMB описаны в документах организации, названной «Проект 2 партнерства по созданию системы 3-го поколения» (3GPP2). Для ясности, некоторые аспекты методов описываются ниже для передачи данных в LTE, и терминология LTE используется в большей части описания ниже.
Фиг.1 изображает систему 100 беспроводной связи, которой может быть система LTE. Система 100 может включать в себя несколько узлов В 110 и другие сетевые объекты. Узел В может представлять собой стационарную станцию, которая выполняет связь с UE и также может упоминаться как эволюционированный узел В (eNB), базовая станция, точка доступа и т.п. Каждый узел В 110 обеспечивает покрытие связи для конкретной географической области. Чтобы улучшить пропускную способность системы, вся зона покрытия узла В может разбиваться на многочисленные (например, три) меньшие зоны. Каждая меньшая зона может обслуживаться соответствующей подсистемой узла В. В 3GPP термин «сота» может ссылаться на наименьшую зону покрытия узла В и/или подсистемы узла В, обслуживающие данную зону покрытия. В 3GPP2 термин «сектор» может ссылаться на наименьшие зоны покрытия базовой станции и/или подсистемы базовой станции, обслуживающие данную зону покрытия. Для ясности, ниже в описании используется понятие 3GPP соты.
UE 120 могут быть рассредоточены по системе, и каждое UE может быть стационарным или мобильным. UE также может упоминаться как мобильная станция, терминал, терминал доступа, абонентский блок, станция и т.д. UE может представлять собой сотовый телефон, персональный цифровой помощник (PDA), беспроводный модем, устройство беспроводной связи, карманное устройство, портативный компьютер, беспроводный телефон и т.д. UE может выполнять связь с узлом В по нисходящей и восходящей линиям связи. Нисходящая линия связи (или прямая линия связи) ссылается на линию связи от узла В на UE, и восходящая линия связи (или обратная линия связи) ссылается на линию связи от UE на узел В.
LTE использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) по нисходящей линии связи и мультиплексирование с частотным разделением каналов на одной несущей (SC-FDM) на восходящей линии связи. OFDM и SC-FDM разбивают полосу частот системы на многочисленные (K) ортогональные поднесущие, которые также обычно упоминаются как тоны, бины и т.д. Каждая поднесущая может модулироваться данными. Обычно модуляционные символы посылаются в частотной области при помощи OFDM и во временной области при помощи SC-FDM. Промежуток между соседними поднесущими может быть фиксированным, и общее количество поднесущих (K) может зависеть от полосы частот системы. Например, K может быть равно 128, 256, 512, 1024 или 2048 для полосы частот системы 1,25, 2,5, 5, 10 или 20 МГц, соответственно.
K результирующих поднесущих могут группироваться в блоки ресурсов. Каждый блок ресурсов может включать в себя N поднесущих (например, N=12 поднесущим) в одном слоте. Доступные блоки ресурсов могут назначаться UE для передачи данных трафика и управляющей информации. K результирующих поднесущих также могут разбиваться на подполосы. Каждая подполоса может включать в себя 72 поднесущие в 6 блоках ресурсов и может охватывать 1,08 МГц.
Система может использовать FDD или TDD. Для FDD нисходящей линии связи и восходящей линии связи могут распределяться отдельные частотные каналы, и характеристика канала для нисходящей линии связи может не сопоставляться с характеристикой канала для восходящей линии связи. Для TDD нисходящая линия связи и восходящая линия связи могут совместно использовать один и тот же частотный канал, и характеристика канала нисходящей линии связи может сопоставляться с характеристикой канала восходящей линии связи.
Фиг.2А изображает примерную структуру 200 кадра типа 1 структуры кадра (FS1), которая может использоваться для FDD в LTE. Временная шкала передачи для каждой линии связи может разбиваться на блоки радиокадров. Каждый радиокадр может иметь заданную длительность (например, 10 миллисекунд (мс)) и может разбиваться на 10 подкадров с индексами 0-9. Каждый подкадр может включать в себя два слота, и каждый слот может включать в себя L периодов символа, например, L=6 периодам символа для расширенного циклического префикса или L=7 периодам символа для нормального циклического префикса.
Для FDD 10 подкадров могут быть доступны для передачи по нисходящей линии связи, и 10 подкадров могут быть доступны для передачи по восходящей линии связи в каждом радиокадре. Передачи по нисходящей линии связи и восходящей линии связи разбиваются в частотной области.
Фиг.2В изображает примерную структуру 250 кадра типа 2 структуры кадра (FS2), которая может использоваться для TDD в LTE. Временная шкала передачи может разбиваться на блоки радиокадров. Каждый радиокадр может иметь длительность 10 мс и может разбиваться на 10 подкадров с индексами 0-9. LTE поддерживает многочисленные конфигурации нисходящей-восходящей линий связи. Подкадры 0 и 5 могут использоваться для нисходящей линии связи (DL), и подкадр 2 может использоваться для восходящей линии связи (UL) для всех конфигураций нисходящей-восходящей линий связи. Каждый из подкадров 3, 4, 7, 8 и 9 может использоваться или для нисходящей линии связи, или для восходящей линии связи в зависимости от конфигурации нисходящей-восходящей линий связи. Подкадр 1 может включать в себя три специальных поля, составленных из временного слота пилот-сигнала нисходящей линии связи (DwPTS) для сигналов передачи данных, управления и синхронизации, защитного интервала (GP) без передачи и временного слота пилот-сигнала восходящей линии связи (UpPTS) для зондирующих опорных сигналов и канала случайного доступа (RACH). Подкадр 6 может включать в себя только DwPTS, или все три специальных поля, или подкадр нисходящей линии связи в зависимости от конфигурации нисходящей-восходящей линий связи. DwPTS, GP и UpPTS могут иметь разные длительности для разных конфигураций подкадров. Каждый подкадр, который не используется для специальных полей, может разбиваться на два слота, и каждый слот может включать в себя L периодов символа.
Структуры 200 и 250 кадра изображаются в документе TS 36.2113GPP, озаглавленном «Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation», который находится в свободном доступе.
Система может поддерживать различные опорные сигналы для нисходящей линии связи и восходящей линии связи. Опорный сигнал может использоваться приемником для различных целей, таких как оценка канала, когерентная демодуляция, измерение качества канала, измерение уровня сигнала и т.д. В таблице 1 перечислены некоторые опорные сигналы, которые могут передаваться по нисходящей линии связи и восходящей линии связи, и она обеспечивает краткое описание каждого опорного сигнала. Характерный для соты опорный сигнал также может упоминаться как общий пилот-сигнал, широкополосный пилот-сигнал и т.д.
Опорные сигналы могут генерироваться различным образом. В одной разработке последовательность характерного для соты опорного сигнала может генерироваться на основе псевдослучайной последовательности следующим образом:

где c(n) представляет собой псевдослучайную последовательность, и
r csrs(n) представляет собой последовательность характерного для соты опорного сигнала.
Псевдослучайная последовательность c(n) может генерироваться при помощи регистра сдвига с линейной обратной связью (LFSR), который может инициализироваться значением, определенным на основе идентификатора соты (ID). В разработке, показанной в уравнении (1), последовательность r csrs(n) характерного для соты опорного сигнала состоит из комплекснозначных символов, причем каждый комплекснозначный символ задается двумя последовательными символами псевдослучайной последовательности. Последовательность r csrs(n) может использоваться для генерирования характерного для соты опорного сигнала.
Зондирующий опорный сигнал может генерироваться на основе последовательности нулевой автокорреляции с постоянной амплитудой (CAZAC), имеющей хорошие корреляционные свойства. В одной разработке последовательность CAZAC представляет собой последовательность Задова-Чу (Zardoff-Chu), которая может быть выражена как:

где q представляет собой корень, и L представляет собой длину последовательности Задова-Чу, и
x q(n) представляет собой последовательность Задова-Чу q-ого корня.
L может представлять собой наибольшее простое число меньшее, чем требуемая длина последовательности зондирующего опорного сигнала. Последовательность Задова-Чу может повторяться необходимое число раз для получения базовой последовательности r b(n) требуемой длины следующим образом:

В другой разработке базовая последовательность может определяться следующим образом:
где φ(n) представляет собой набор фаз, определенных для получения последовательности CAZAC.
Для обеих разработок выше последовательность r srs(n) зондирующего опорного сигнала может быть получена посредством циклического сдвига базовой последовательности r b(n) следующим образом:

где α представляет собой циклический сдвиг, присвоенный UE. Последовательность r srs(n) может использоваться для генерирования зондирующего опорного сигнала.
Узел В также может посылать характерный для UE опорный сигнал на UE. Генерирование характерного для соты опорного сигнала, зондирующего опорного сигнала и других опорных сигналов в LTE описывается в вышеупомянутом документе TS 36.211 3GPP.
Фиг.3А изображает примерную передачу характерного для соты опорного сигнала с четырех антенн 0-3 для одной соты. В LTE каждый слот включает в себя семь периодов 0-6 символа для нормального циклического префикса. Характерный для соты опорный сигнал может передаваться с антенн 0 и 1 в периодах 0 и 4 символа каждого слота и с антенн 2 и 3 в периоде 1 символа каждого слота.
Характерный для соты опорный сигнал может передаваться с данной антенны на поднесущих, которые разнесены на шесть поднесущих в каждом периоде символа, в котором передается опорный сигнал. Кроме того, другие сигналы не могут передаваться сотой на поднесущих, используемых для характерного для соты опорного сигнала, чтобы избежать помех для характерного для соты опорного сигнала. Как показано на фиг.3А, характерный для соты опорный сигнал может передаваться с антенны 0 по первому набору поднесущих в периоде 0 символа и по второму набору поднесущих в периоде 4 символа каждого слота. Поднесущие во втором наборе могут быть смещены от поднесущих в первом наборе на три поднесущие. Характерный для соты опорный сигнал может передаваться с антенны 1 по второму набору поднесущих в периоде 0 символа и по первому набору поднесущих в периоде 4 символа каждого слота. Характерный для соты опорный сигнал может передаваться с антенны 2 по первому набору поднесущих в периоде 1 символа каждого слота с четным номером и по второму набору поднесущих в периоде 1 символа каждого слота с нечетным номером. Характерный для соты опорный сигнал может передаваться с антенны 3 по второму набору поднесущих в периоде 1 символа каждого слота с четным номером и по первому набору поднесущих в периоде 1 символа каждого слота с нечетным номером.
Фиг.3В изображает примерную передачу зондирующего опорного сигнала по восходящей линии связи. Зондирующий опорный сигнал может передаваться через поднесущую в наборе поднесущих, которые могут охватывать одну подполосу частот, многочисленные подполосы частот или всю полосу частот системы. Зондирующий опорный сигнал может передаваться в последнем периоде символа подкадра. Зондирующий опорный сигнал может передаваться по разным подполосам частот в разных подкадрах, например, с циклическим повторением по подполосам частот и передачей зондирующего опорного сигнала по другой подполосе частот в каждом подкадре, в котором передается зондирующий опорный сигнал. Зондирующий опорный сигнал также может передаваться с разных антенн в UE в разных подкадрах, например, с циклическим повторением по антеннам и передачей зондирующего опорного сигнала с другой антенны в каждом подкадре, в котором передается зондирующий опорный сигнал.
Передача характерного для соты опорного сигнала и зондирующего опорного сигнала описывается в вышеупомянутом документе TS 36.211 3GPP.
Фиг.4 изображает блок-схему разработки узла В 110 и UE 120, которым может быть один из узлов В и одно из UE на фиг.1. Узел В 110 оснащен многочисленными (T) антеннами 434а-434t. UE 120 оснащено многочисленными (R) антеннами 452a-452r. Большая часть описания ниже предполагает, что каждая антенна может использоваться для передачи и приема данных.
На узле В 110 процессор 420 передачи может принимать данные трафика для одного или нескольких UE от источника 412 данных, обрабатывать (например, кодировать и модулировать) данные трафика для каждого UE, основываясь на одной или нескольких схемах модуляции и кодирования (MCS) для этого UE, и подавать символы данных на все UE. Процессор 420 передачи также может генерировать управляющие символы для управляющей информации/сигнализации. Процессор 420 передачи дополнительно может генерировать опорные символы для одного или нескольких опорных сигналов, например, характерного для соты опорного сигнала. Процессор 430 MIMO может выполнять предварительное кодирование для символов данных, управляющих символов и опорных сигналов, как описано ниже, и может подавать Т выходных потоков символов на Т модуляторов (MOD) 432a-432t. Каждый модулятор 432 может обрабатывать свой выходной поток символов (например, для OFDM) для получения выходного потока отсчетов. Каждый модулятор 432 дополнительно может приводить в определенное состояние (например, преобразовывать в аналоговую форму, фильтровать, усиливать и преобразовывать с повышением частоты) свой выходной поток отсчетов и генерировать сигнал нисходящей линии связи. Т сигналов нисходящей линии связи от модуляторов 432a-432t могут передаваться при помощи антенн 434a-434t, соответственно.
На UE 120 R антенн 452a-452r могут принимать Т сигналов нисходящей линии связи от узла В 110, и каждая антенна 452 может подавать принятый сигнал на связанный с ней демодулятор (DEMOD) 454. Каждый демодулятор 454 может приводить в определенное состояние (например, фильтровать, усиливать, преобразовывать с понижением частоты и оцифровывать) свой принятый сигнал для получения отсчетов и может дополнительно обрабатывать отсчеты (например, для OFDM) для получения принятых символов. Каждый демодулятор 454 может подавать принятые символы данных и принятые управляющие символы на обнаружитель 460 MIMO и может подавать принятые опорные символы на процессор 494 канала. Процессор 494 канала может оценивать MIMO-канал нисходящей линии связи от узла В 110 на UE 120, основываясь на принятых опорных символах, и может подавать оценку MIMO-канала нисходящей линии связи на обнаружитель 460 MIMO. Обнаружитель 460 MIMO может выполнять обнаружение MIMO по принятым символам данных и принятым управляющим символам, основываясь на оценке MIMO-канала нисходящей линии связи, и подавать оценки символов, которые представляют собой оценки переданных символов. Процессор 470 приема может обрабатывать (например, демодулировать и декодировать) оценки символов, подавать декодированные данные трафика на приемник 472 данных, и подавать декодированную управляющую информацию на контроллер/процессор 490.
UE 120 может оценивать качество канала нисходящей линии связи и генерировать информацию обратной связи, которая может содержать различные типы информации, описанные ниже. Информация обратной связи, данные трафика от источника 478 данных и один или несколько опорных сигналов (например, зондирующий опорный сигнал) могут обрабатываться (например, кодироваться и модулироваться) процессором 480 передачи, предварительно кодироваться процессором 482 MIMO и дополнительно обрабатываться модуляторами 454a-454r для генерирования R сигналов восходящей линии связи, которые могут передаваться при помощи антенн 452a-452r. На узле В 110 R сигналов восходящей линии связи от UE 120 могут приниматься антеннами 434a-434t и обрабатываться демодуляторами 432a-432t. Процессор 444 канала может оценивать MIMO-канал восходящей линии связи от UE 120 на узел В 110 и может подавать оценку MIMO-канала восходящей линии связи на обнаружитель 436 MIMO. Обнаружитель 436 MIMO может выполнять обнаружение MIMO, основываясь на оценке MIMO-канала восходящей линии связи и подавать оценки символов. Процессор 438 приема может обрабатывать оценки символов, подавать декодированные данные трафика на приемник 439 данных и подавать декодированную информацию обратной связи на контроллер/процессор 440. Контроллер/процессор 440 может управлять передачей данных на UE 120, основываясь на информации обратной связи.
Контроллеры/процессоры 440 и 490 могут руководить работой на узле В 110 и UE 120, соответственно. Память 442 и 492 может хранить данные и программные коды для узла В 110 и UE 120, соответственно. Планировщик 446 может выбирать UE 120 и/или другие UE для передачи данных по нисходящей линии связи и/или восходящей линии связи, основываясь на информации обратной связи, принятой от UE. Планировщик 446 также может распределять ресурсы запланированным UE.
MIMO-канал нисходящей линии связи, сформированный посредством Т антенн на узле В 110 и R антенн на UE 120, может характеризоваться матрицей H DL(k) MIMO-канала размера R×T для каждой поднесущей k. H DL(k) может быть выражена как:
где h i,j(k) для i=1, … R и j=1, … T представляет собой комплексный коэффициент усиления между антенной j узла В и антенной i UE для поднесущей k.
MIMO-канал восходящей линии связи, сформированный R антеннами на UE 120 и Т антеннами на узле В 110, может характеризоваться матрицей H UL(k) MIMO-канала размера T×R для каждой поднесущей k. H UL(k) может иметь форму, показанную в уравнении (6).
Для FDD матрица H DL(k) MIMO-канала нисходящей линии связи может не сопоставляться с матрицей H UL(k) MIMO-канала восходящей линии связи. Узел В может оценивать H UL(k), основываясь на зондирующем опорном сигнале, передаваемым UE. Узел В может посылать информацию об индикаторе матрицы предварительного кодирования (PMI), полученную из H UL(k), на UE для предварительного кодирования на восходящей линии связи. Аналогично, UE может оценивать H DL(k), основываясь на характерном для соты опорном сигнале, передаваемым узлом В. UE может посылать информацию о PMI, полученной из H DL(k), на узел В для предварительного кодирования на нисходящей линии связи.
Для TDD матрица H DL(k) MIMO-канала нисходящей линии связи может сопоставляться с матрицей H UL(k) MIMO-канала восходящей линии связи и предполагается, что они могут быть обратными величинами друг для друга, так что H UL(k)=H T DL(k), где «Т» обозначает транспонирование. В данном случае узел В может оценивать H UL(k), основываясь на зондирующем опорном сигнале, передаваемом UE. Узел В может оценивать H DL(k), основываясь на оцененной H UL(k), предполагая обратимость каналов. Узел В затем может использовать H DL(k) для получения информации о PMI для нисходящей линии связи. Аналогично, UE может оценивать H DL(k), основываясь на характерном для соты опорном сигнале, передаваемом узлом В. UE может оценивать H UL(k), основываясь на оцененной H DL(k), предполагая обратимость каналов. UE тогда может использовать H UL(k) для получения информации о PMI для восходящей линии связи.
Общий MIMO-канал нисходящей линии связи состоит из каналов передачи для Т антенн на узле В, MIMO-канала нисходящей линии связи и приемных каналов для R антенн на UE. Общий MIMO-канал восходящей линии связи состоит из передающих каналов для R антенн на UE, MIMO-канала восходящей линии связи и приемных каналов для Т антенн на узле В. Для FDD общий MIMO-канал нисходящей линии связи для каждой линии связи может оцениваться на основе опорного сигнала, принимаемого по этой линии связи. Для TDD общий MIMO-канал нисходящей линии связи может не быть обратимым для общего MIMO-канала восходящей линии связи, даже если H UL(k)=H T DL(k) из-за различий между характеристиками каналов передачи и приема на узле В и UE. Калибровка может выполняться для определения матрицы калибровки, которая может применяться (например, на узле В) для учета различий между характеристиками каналов передачи и приема на узле В и UE. Калибровка может выполняться так, как описано в заявке на патент США №10/693169, озаглавленной «CHANNEL CALIBRATION FOR A TIME DIVISION DUPLEXED COMMUNICATION SYSTEM», которая принадлежит этому же правопреемнику, что и данная заявка, и которая подана 23 октября 2003 г. Если применяется матрица калибровки, общий MIMO-канал нисходящей линии связи, как предполагается, может представлять собой обратную величину общего MIMO-канала восходящей линии связи. Для простоты, нижеследующее описание предполагает, что каналы передачи и приема имеют плоские характеристики, матрица калибровки представляет собой единичную матрицу I, матрица общего MIMO-канала нисходящей линии связи представляет собой H DL(k), матрица общего MIMO-канала восходящей линии связи представляет собой H UL(k), и H UL(k)=H T DL(k)для TDD.
Как для FDD, так и для TDD, узел В может передавать М потоков символов по М уровням на UE, где, в основном, 1≤М≤min{T, R}. Уровни можно рассматривать как пространственные каналы MIMO-канала. Аналогично, UE может передавать М потоков символов по М уровням на узел В. Количество потоков символов для посылки по восходящей линии связи может быть равным или может не быть равным количеству потоков символов для посылки по нисходящей линии связи. Для ясности, ниже описывается передача данных по нисходящей линии связи.
Хорошие рабочие характеристики могут достигаться посредством передачи данных по собственным модам MIMO-канала. Собственные моды можно рассматривать как ортогональные пространственные каналы. Чтобы передавать данные по собственным модам, узел В может получать матрицу предварительного кодирования, основываясь на формировании идеального собственного луча или на формировании псевдособственного луча, и затем может выполнять предварительное кодирование при помощи матрицы предварительного кодирования. Таблица 2 суммирует характеристики формирования идеального и псевдособственного луча.
Для формирования идеального собственного луча матрица H DL(k) MIMO-канала нисходящей линии связи может диагонализироваться посредством разложения по сингулярным числам следующим образом:

где U(k) представляет собой унитарную матрицу размера R×R левых собственных векторов H DL(k),
V(k) представляет собой унитарную матрицу размера T×T правых собственных векторов H DL(k),
∑(k) представляет собой диагональную матрицу размера R×T сингулярных чисел H DL(k), и
«H» обозначает эрмитово или сопряженное транспонирование.
Унитарная матрица имеет столбцы, которые являются ортогональными друг другу, и каждый столбец имеет единичную мощность. Диагональная матрица имеет возможные ненулевые значения по диагонали и нули в других местах. Сингулярные числа в ∑(k) указывают на коэффициенты усиления канала собственных мод H
DL(k), полученные посредством разложения по сингулярным числам. Матрица V(k) также может упоминаться как матрица собственного луча, матрица формирования луча и т.д. Матрица V(k) собственного луча также может быть получена посредством выполнения разложения по собственным значениям ковариационной матрицы H
DL(k). Разложение по собственным значениям может быть выражено как  , где Λ(k)=ΣH(k)Σ(k) и Λ(k) представляет собой диагональную матрицу собственных значений H
DL(k).
, где Λ(k)=ΣH(k)Σ(k) и Λ(k) представляет собой диагональную матрицу собственных значений H
DL(k).
Узел В может передавать данные по М собственным модам на UE, где 1≤М≤min{T, R}. Количество собственных мод (М) для использования для передачи данных также может упоминаться как ранг передачи данных.
Матрица W IBF(k) предварительного кодирования может быть сформирована на основе М столбцов V(k) для М собственных мод. В одной разработке W IBF(k) может быть сформирована следующим образом:

где v m(k) представляет собой столбец V(k) для m-ой выбранной собственной моды, для m=1, … М, и
W IBF(k) представляет собой матрицу предварительного кодирования размера T×M для формирования идеального собственного луча (IBF).
В другой разработке может поддерживаться кодовая книга матриц предварительного кодирования. W IBF(k) может быть сформирована на основе матрицы предварительного кодирования в кодовой книге, которая наиболее точно соответствует V(k), например, имеет минимальное расстояние до V(k).
Узел В может выполнять масштабирование символов и предварительное кодирование для формирования идеального собственного луча следующим образом:

где d(k) представляет собой вектор размера M×1 символов данных для посылки по поднесущей k,
G(k) представляет собой диагональную матрицу размера M×M коэффициентов усиления для символов данных, и
x(k) представляет собой вектор размера T×1 выводимых символов для поднесущей k.
UE может получать принимаемые символы от R антенн, которые могут выражаться как:

где H EDL(k)=H DL(k)W IBF(k)G(k) представляет собой матрицу эффективного MIMO-канала размера R×M для формирования идеального собственного луча,
r(k) представляет собой вектор размера R×1 принимаемых символов для поднесущей k, и
n(k) представляет собой вектор размера R×1 шума и помех для поднесущей k.
Шум и помехи могут иметь ковариационную матрицу R
nn(k)=E{n(k)n
H(k)}, где E{} обозначает ожидание. Предполагается, что шум и помехи представляют собой аддитивный белый гауссов шум (AWGN) с нулевым вектором средних значений и ковариационной матрицей  , где
, где  представляет собой дисперсию шума и помех.
представляет собой дисперсию шума и помех.
UE может выполнять обнаружение MIMO, основываясь на минимальной среднеквадратической ошибке (MMSE), коррекции с форсированием нуля, MMSE с последовательным подавлением помех или некотором другом методе обнаружения MIMO. Для MMSE UE может выводить матрицу M(k) обнаружения размера M×R для каждой поднесущей k следующим образом:

где  , и
, и
D(k)=[diagZ(k)]-1 представляет собой диагональную матрицу значений масштабирования для получения нормализованных оценок символов.
UE может выполнять обнаружение MIMO следующим образом:
где  представляет собой вектор размера M×1 оценок символов для поднесущей k.
представляет собой вектор размера M×1 оценок символов для поднесущей k.  представляет собой оценку d(k), посылаемых узлом В.
представляет собой оценку d(k), посылаемых узлом В.
Отношение сигнала к шуму и помехам (SINR) для каждой собственной моды может быть выражено следующим образом:

где z m(k) представляет собой m-ый диагональный элемент Z(k), и
SINRm(k) представляет собой SINR собственной моды m для поднесущей k.
Вообще, SINR может зависеть от метода обнаружения MIMO, используемого посредством UE. Разные методы обнаружения MIMO могут ассоциироваться с разными уравнениями для вычисления SINR.
Предсказание ранга может выполняться (например, посредством UE) для определения М собственных мод для использования для передачи данных. В одной разработке предсказания ранга общая пропускная способность может вычисляться для каждой возможной комбинации собственных мод, которые могут использоваться для передачи данных. Для данной комбинации или гипотезы собственных мод доступная мощность Pavail передачи может распределяться по М собственным модам в этой комбинации, основываясь на равномерном распределении мощности, так что Pm=Pavail/M, и Pm представляет собой мощность передачи, распределенную собственной моде m. Распределение мощности также может основываться на методе заполнения водой или некотором другом методе. Матрица G(k) коэффициентов усиления может вычисляться на основе мощности передачи, распределенной М собственным модам. Матрица G(k) коэффициентов усиления может включать в себя ненулевой коэффициент усиления для каждой выбранной собственной моды и нулевой коэффициент усиления для каждой невыбранной собственной моды. Матрица H EDL(k) эффективного MIMO-канала затем может определяться на основе матрицы H DL(k) MIMO-канала, матрицы W IBF(k) предварительного кодирования и матрицы G(k) коэффициентов усиления. SINR М собственных мод могут определяться на основе матрицы H EDL(k) эффективного MIMO-канала и ковариационной матрицы R nn(k) шума, как описано выше. Общая пропускная способность для текущей гипотезы тогда может определяться на основе SINR М собственных мод.
Описанное выше вычисление может повторяться для каждой возможной комбинации собственных мод для получения общей пропускной способности для этой комбинации. Для передачи данных может выбираться комбинация собственных мод с наибольшей общей пропускной способностью. Предсказание ранга описывается в заявке на патент США №11/449893, принадлежащей этому же правопреемнику, что и данная заявка, и озаглавленной «ROBUST RANK PREDICTION FOR A MIMO SYSTEM», поданной 9 июня 2006 г.
Для передачи по нисходящей линии связи UE может преобразовать SINR каждой из М собственных мод в значение CQI, основываясь на заданном отображении. UE может получить информацию о CQI для М собственных мод, которая может содержать (i) значение CQI для каждой собственной моды или (ii) базовый CQI для первой собственной моды и дельта CQI для разности между значениями CQI последующих собственных мод. UE может послать информацию о CQI узлу В. Узел В может выбрать схему модуляции и кодирования (MCS) для каждой собственной моды, основываясь на значении CQI для этой собственной моды.
Для формирования псевдособственного луча матрица псевдолуча может быть сформирована для каждой поднесущей k следующим образом:

где h DL,i(k) представляет собой вектор канала размера T×1 для антенны i UE,
b i(k) представляет собой случайный вектор размера T×1, и
B(k) представляет собой матрицу псевдолуча размера T×Т.
Как правило, B(k) может быть сформирована с нулевым или большим количеством векторов канала в H DL(k) для нулевого или большего количества антенн UE. Каждый вектор h DL,i(k) канала может соответствовать одной строке H DL(k). Остальные столбцы B(k) могут представлять собой случайные векторы, которые могут быть столбцами матрицы дискретного преобразования Фурье (DFT), матрицы Адамара или Уолша или некоторой другой матрицы.
QR-разложение матрицы B(k) псевдолуча может быть выполнено следующим образом:

где Q(k) представляет собой ортогональную матрицу размера T×Т, содержащую Т ортогональных векторов, и
R(k) представляет собой верхнюю треугольную матрицу с нулями ниже диагонали.
Q(k) может включать в себя вектор  для каждого вектора канала, используемого для B(k).
для каждого вектора канала, используемого для B(k).
Матрица W PBF(k) предварительного кодирования может быть сформирована на основе М столбцов Q(k) для М собственных мод. В одной разработке W PBF(k) может быть сформирована следующим образом:

где q m(k) представляет собой столбец Q(k) для m-ой выбранной собственной моды, для m=1, … М, и
W PBF(k) представляет собой матрицу предварительного кодирования размера T×М для формирования псевдособственного луча (PBF).
В другом методе может поддерживаться кодовая книга матриц предварительного кодирования. W PBF(k) может быть сформирована на основе матрицы предварительного кодирования в кодовой книге, которая наиболее точно соответствует Q(k).
Узел В может выполнять масштабирование символов и предварительное кодирование для формирования псевдособственного луча следующим образом:

где x PBF(k) представляет собой вектор размера T×1 выводимых символов для поднесущей i.
UE может получать принимаемые символы от R антенн, которые могут быть выражены как:
где H EDL(k)=H DL(k)W PBF(k)G(k) представляет собой матрицу эффективного MIMO-канала размера R×M для формирования псевдособственного луча.
UE может выполнять обнаружение MIMO, основываясь на MMSE. UE может выводить матрицу M(k) обнаружения для каждой поднесущей k, как показано в уравнении (11). UE затем может выполнять обнаружение MIMO по принятым символам, как показано в уравнении (12) для получения оценок символов.
Выбор ранга может выполняться (например, посредством UE) для выбора М собственных мод для использования для передачи данных по нисходящей линии связи. Предсказание ранга может выполняться так, как описано выше, хотя и с матрицей W PBF(k) предварительного кодирования, полученной на основе Q(k) вместо V(k). SINR каждой собственной моды может оцениваться так, как описано выше, хотя и с матрицей W PBF(k) предварительного кодирования вместо W IBF(k). UE может получать информацию о CQI для М собственных мод, основываясь на SINR собственных мод, и может посылать информацию о CQI на узел В. Узел В может выбирать схему модуляции и кодирования для каждой собственной моды, основываясь на значении CQI для этой собственной моды.
Таблица 3 суммирует опорные сигналы и информацию обратной связи, посылаемые узлом В и UE для MIMO-передачи по нисходящей линии связи для формирования идеального собственного луча и формирования псевдособственного луча в системах как FDD, так и в TDD. Узел В может передавать характерный для соты опорный сигнал по нисходящей линии связи. UE может оценивать MIMO-канал нисходящей линии связи, основываясь на характерном для соты опорном сигнале. UE может получать матрицу предварительного кодирования для формирования или идеального собственного, или псевдособственного луча, основываясь на оценке MIMO-канала нисходящей линии связи. UE также может выполнять предсказание ранга и определять количество уровней или потоков (М) символов для посылки и значение CQI каждого уровня, основываясь на матрице предварительного кодирования и другой информации. Для FDD UE может посылать информацию обратной связи, содержащую информацию о CQI и информацию о PMI. Ранг М может (i) явно предоставляться в информации обратной связи или (ii) неявно предусматриваться размерностью матрицы предварительного кодирования и/или количеством значений CQI, посылаемых UE. Для TDD UE может посылать эту же информацию обратной связи, что и для FDD. Альтернативно, UE может посылать зондирующий опорный сигнал, который может использоваться узлом В для определения матрицы предварительного кодирования.
MIMO-передача по восходящей линии связи с формированием идеального собственного луча и формированием псевдособственного луча в системах FDD и TDD может выполняться аналоговым образом в виде MIMO-передачи по нисходящей линии связи. UE может передавать зондирующий опорный сигнал, который может использоваться узлом В для оценки MIMO-канала восходящей линии связи. Для FDD узел В может посылать информацию обратной связи, содержащую информацию о CQI и PMI. Для TDD узел В может посылать информацию о CQI и или информацию о PMI, или характерный для соты опорный сигнал.
Фиг.5 изображает разработку процесса 500 посылки данных в системе беспроводной связи. Процесс 500 может выполняться передатчиком, которым может быть узел В для передачи данных по нисходящей линии связи, UE для передачи данных по восходящей линии связи или некоторый другой объект.
Передатчик может посылать первый опорный сигнал по первой линии связи на приемник (блок 512). Передатчик может принимать информацию о CQI, определенную приемником, основываясь на первом опорном сигнале (блок 514). Передатчик также может принимать второй опорный сигнал по второй линии связи от приемника (блок 516). Передатчик может получать по меньшей мере одну матрицу H(k) MIMO-канала для первой линии связи, основываясь на втором опорном сигнале, принимаемом по второй линии связи, предполагая обратимость каналов (блок 518). Передатчик может определять по меньшей мере одну матрицу предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала (блок 520). Передатчик затем может посылать передачу данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI (блок 522).
В одной разработке блока 520 передатчик может выполнять разложение по сингулярным числам по меньшей мере одной матрицы H(k) MIMO-канала для получения по меньшей мере одной матрицы V(k) собственных векторов, например, как показано в уравнении (7). Передатчик может определять по меньшей мере одну матрицу W IBF(k) предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов, например, как показано в уравнении (8). В другой разработке блока 520 передатчик может формировать по меньшей мере одну матрицу B(k) псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала, например, как показано в уравнении (14). Передатчик может выполнять QR-разложение по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы Q(k) ортогональных векторов, например, как показано в уравнении (15). Передатчик затем может определять по меньшей мере одну матрицу W PBF(k) предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов, например, как показано в уравнении (16).
В другой разработке блока 522 передатчик может выполнять кодирование и модуляцию для передачи данных, основываясь на информации о CQI. Передатчик может выполнять предварительное кодирование для передачи данных, основываясь на по меньшей мере одной матрице предварительного кодирования, например, как показано в уравнении (9) или (17).
Фиг.6 изображает разработку устройства 600 для посылки данных в системе беспроводной связи. Устройство 600 включает в себя модуль 612 для посылки первого опорного сигнала по первой линии связи на приемник, модуль 614 для приема информации о CQI, определенной приемником, основываясь на первом опорном сигнале, модуль 616 для приема второго опорного сигнала по второй линии связи от приемника, модуль 618 для получения по меньшей мере одной матрицы MIMO-канала для первой линии связи, основываясь на втором опорном сигнале, принимаемом по второй линии связи, модуль 620 для определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала, и модуль 622 для посылки передачи данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI.
Фиг.7 изображает разработку процесса 700 для приема данных в системе беспроводной связи. Процесс 700 может выполняться приемником, которым может быть UE для передачи данных по нисходящей линии связи, узел В для передачи данных по восходящей линии связи или некоторый другой объект.
Приемник может принимать первый опорный сигнал по первой линии связи от передатчика (блок 712). Приемник может определять информацию о CQI, основываясь на первом опорном сигнале (блок 714) и может посылать информацию о CQI на передатчик (блок 716). Приемник также может посылать второй опорный сигнал по второй линии связи (блок 718). Приемник может принимать передачу данных, посылаемую передатчиком, основываясь на информации о CQI и по меньшей мере одной матрице предварительного кодирования, которая может определяться передатчиком, основываясь на втором опорном сигнале (блок 720). Приемник может получать по меньшей мере одну матрицу H(k) MIMO-канала для первой линии связи, основываясь на первом опорном сигнале (блок 722). Приемник может определять по меньшей мере одну матрицу M(k) обнаружения, основываясь на по меньшей мере одной матрице MIMO-канала, например, как показано в уравнении (11) (блок 724). Приемник может выполнять обнаружение MIMO для принимаемой передачи данных, основываясь на по меньшей мере одной матрице обнаружения, например, как показано в уравнении (12) (блок 726).
В одной разработке приемник может выполнять разложение по сингулярным числам по меньшей мере одной матрицы H(k) MIMO-канала для получения по меньшей мере одной матрицы V(k) собственных векторов. Приемник может определять по меньшей мере одну матрицу W IBF(k) предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов. В другой разработке приемник может формировать по меньшей мере одну матрицу B(k) псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала. Приемник может выполнять QR-разложение по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы Q(k) ортогональных векторов. Приемник затем может определять по меньшей мере одну матрицу W PBF(k) предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов. Для обеих разработок приемник может определять по меньшей мере одну матрицу M(k) обнаружения, основываясь дополнительно на по меньшей мере одной матрице предварительного кодирования. Приемник также может определять информацию о CQI, основываясь на по меньшей мере одной матрице предварительного кодирования.
Фиг.5 и 7 могут использоваться для передачи данных по нисходящей линии связи или восходящей линии связи. Для передачи данных по нисходящей линии связи первым опорным сигналом может быть характерный для соты опорный сигнал, посылаемый по нисходящей линии связи, и вторым опорным сигналом может быть зондирующий опорный сигнал, посылаемый по восходящей линии связи. Информация о CQI может посылаться в по меньшей мере одном SC-FDMA-символе по восходящей линии связи. По меньшей мере один OFDMA-символ может посылаться по нисходящей линии связи для передачи данных. Для передачи данных по восходящей линии связи первым опорным сигналом может быть зондирующий опорный сигнал, посылаемый по восходящей линии связи, и вторым опорным сигналом может быть характерный для соты опорный сигнал, посылаемый по нисходящей линии связи. Информация о CQI может посылаться в по меньшей мере одном OFDMA-символе по нисходящей линии связи. По меньшей мере один SC-FDMA-символ может посылаться по восходящей линии связи для передачи данных. Информация о CQI также может упоминаться как информация о MCS, информация о транспортном формате, информация о формате пакета, информация о скорости передачи, информация обратной связи и т.д.
Для передачи данных по нисходящей линии связи или восходящей линии связи один из опорных сигналов (например, характерный для соты опорный сигнал) может генерироваться на основе псевдослучайной последовательности, например, как показано в уравнении (1). Другой опорный сигнал (например, зондирующий опорный сигнал) может генерироваться на основе последовательности CAZAC, например, как показано в уравнении (2) или (4). Опорные сигналы также могут генерироваться другим образом. Первый опорный сигнал может посылаться по поднесущим, разделенным посредством первого промежутка. Второй опорный сигнал может посылаться по поднесущим, разделенным посредством второго промежутка, отличающегося от первого промежутка, например, как показано на фиг.3А и 3В.
Фиг.8 изображает разработку устройства 800 для приема данных в системе беспроводной связи. Устройство 800 включает в себя модуль 812 для приема первого опорного сигнала по первой линии связи от передатчика, модуль 814 для определения информации о CQI, основываясь на первом опорном сигнале, модуль 816 для посылки информации о CQI на передатчик, модуль 818 для посылки второго опорного сигнала по второй линии связи, модуль 820 для приема передачи данных от передатчика, причем передача данных посылается на основе информации о CQI и по меньшей мере одной матрицы предварительного кодирования, определенной передатчиком, основываясь на втором опорном сигнале, модуль 822 для получения по меньшей мере одной матрицы MIMO-канала для первой линии связи, основываясь на первом опорном сигнале, модуль 824 для определения по меньшей мере одной матрицы обнаружения, основываясь на по меньшей мере одной матрице MIMO-канала, и модуль 826 для выполнения обнаружения MIMO для принятой передачи данных, основываясь на по меньшей мере одной матрице обнаружения.
Модули на фиг.6 и 8 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, память и т.п. или любую их комбинацию.
Методы формирования собственного луча, описанные в данном документе, могут обеспечивать некоторые преимущества. Во-первых, формирование собственного луча может обеспечивать более высокое SINR, которое может приводить к более высокой пиковой скорости передачи данных, лучшему покрытию и т.д. Во-вторых, эти методы могут уменьшать величину обратной связи, посылаемой приемником на передатчик.
Специалисту в данной области техники понятно, что информация и сигналы могут представляться с использованием любой из многочисленных различных технологий и методов. Например, данные, инструкции, команды, информация, сигналы, биты, символы и чипы, которые могут упоминаться в вышеупомянутом описании, могут представляться напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Специалист в данной области техники также примет во внимание, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытием в данном документе, могут быть реализованы в виде электронных аппаратных средств, компьютерных программных средств или их комбинаций. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратных и программных средств, различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше, в основном, на языке их функциональных возможностей. Реализуется ли такая функциональная возможность в виде аппаратных средств, или программных средств, зависит от конкретного применения и конструктивных ограничений, накладываемых на всю систему. Специалист в данной области техники может реализовать описанную функциональную возможность различными путями для каждого конкретного применения, но такие решения по реализации не должны интерпретироваться как выходящие из объема настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытием в данном документе, могут реализовываться или выполняться при помощи процессора общего назначения, процессора цифровой обработки сигналов (DSP), специализированной интегральной схемы (специализированной ИС), программируемой вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретной вентильной или транзисторной логики, дискретных аппаратных компонентов или любой их комбинации, предназначенной для выполнения функций, описанных в данном документе. Процессором общего назначения может быть микропроцессор, но, в альтернативе, процессором может быть любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован в виде комбинации вычислительных устройств, например, комбинации DSP и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров вместе с ядром DSP, или любой другой такой конфигурации.
Этапы способа или алгоритма, описанные в связи с раскрытием в данном документе, могут воплощаться непосредственно аппаратными средствами, программным модулем, исполняемым процессором, или их комбинацией. Программный модуль может постоянно находиться в памяти оперативного запоминающего устройства (RAM), флэш-памяти, памяти постоянного запоминающего устройства (ROM), памяти стираемого программируемого ROM (EPROM), памяти электрически стираемого программируемого ROM (EEPROM), регистрах, на жестком диске, съемном диске, компакт-диске или запоминающей среде любого другого вида, известной в технике. Примерная запоминающая среда соединена с процессором, так что процессор может считывать информацию с запоминающей среды и записывать информацию на нее. В альтернативе, запоминающая среда может быть выполнена за одно целое с процессором. Процессор и запоминающая среда могут постоянно находиться в специализированной ИС. Специализированная ИС может постоянно находиться в пользовательском терминале. В альтернативе, процессор и запоминающая среда могут постоянно находиться в качестве дискретных компонентов в пользовательском терминале.
В одной или нескольких примерных разработках, описанные функции могут быть реализованы аппаратными, программными, аппаратно-программными средствами или любой их комбинацией. Если они реализованы программными средствами, функции могут храниться или передаваться в виде одной или нескольких инструкций или кода на считываемой компьютером среде. Считываемая компьютером среда включает в себя как запоминающую среду компьютера, так и среду связи, включающую в себя любую среду, которая способствует пересылке компьютерной программы с одного места на другое. Запоминающая среда может представлять собой любую доступную среду, к которой может обращаться компьютер общего назначения или специального назначения. В качестве примера, и не ограничения, такая считываемая компьютером среда может содержать RAM, ROM, EEPROM, компакт-диск или другое запоминающее устройство на оптическом диске, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, или любую другую среду, которая может использоваться для переноса или хранения требуемого средства программного кода в виде инструкций или структур данных, и к которой может обращаться компьютер общего назначения или специального назначения, или процессор общего назначения или специального назначения. Также любое соединение правильно называется считываемой компьютером средой. Например, если программные средства передаются с веб-сайта, сервера или другого удаленного источника, используя коаксиальный кабель, волоконно-оптический кабель, витую пару, цифровую абонентскую линию (DSL) или беспроводные технологии, такие как инфракрасные, радиочастотные или микроволновые, тогда коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводные технологии, такие как инфракрасные, радиочастотные и микроволновые, включаются в определение среды. Диск (disk) и диск (disc), как используется в данном документе, включает в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой многофункциональный диск (DVD), дискету и диск Blu-ray (синелучевой диск), где диски (disk) обычно воспроизводят данные магнитным образом, тогда как диски (disc) воспроизводят данные оптическим образом при помощи лазеров. Комбинации вышеупомянутых также должны быть включены в объем считываемых компьютером сред.
Предыдущее описание изобретения представлено для того, чтобы предоставить возможность любому специалисту в данной области техники выполнить или использовать изобретение. Различные модификации изобретения легко очевидны для специалиста в данной области техники, и обобщенные принципы, определенные в данном документе, могут быть применены к другим вариантам без отступления от сущности или объема изобретения. Таким образом, изобретение, как предполагается, не ограничивается примерами и вариантами, описанными здесь, но должно соответствовать наибольшему объему, согласующемуся с принципами и новыми признаками, описанными в данном документе.


Изобретение относится к области радиотехники, а именно к методам передачи данных в системе беспроводной связи, и может быть использовано для систем дуплекса с частотным разделением (FDD) и дуплекса с временным разделением (TDD). Технический результат заключается в увеличении пропускной способности. Для этого передатчик посылает первый опорный сигнал по первой линии связи, например, характерный для соты опорный сигнал, по нисходящей линии связи, и принимает информацию об индикаторе качества канала (CQI), определенную приемником, основываясь на первом опорном сигнале. Передатчик также принимает второй опорный сигнал от приемника по второй линии связи, например, зондирующий опорный сигнал по восходящей линии связи, и получает по меньшей мере одну матрицу MIMO-канала для первой линии связи, основываясь на втором опорном сигнале; и определяет по меньшей мере одну матрицу предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала, например, в соответствии с формированием идеального собственного луча или формированием псевдособственного луча, затем посылает передачу данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI. 6 н. и 24 з.п. ф-лы, 10 ил., 3 табл.
1. Способ передачи данных в системе беспроводной связи, содержащий:
посылку первого опорного сигнала по первой линии связи на приемник;
прием информации об индикаторе качества канала (CQI), определенной приемником, основываясь на первом опорном сигнале;
прием второго опорного сигнала по второй линии связи от приемника;
получение по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала) для первой линии связи, основываясь на втором опорном сигнале, принятом по второй линии связи;
определение по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала; и
посылку передачи данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI.
2. Способ по п.1, в котором определение по меньшей мере одной матрицы предварительного кодирования содержит
выполнение разложения по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов, и
определение по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов.
3. Способ по п.1, в котором определение по меньшей мере одной матрицы предварительного кодирования содержит
формирование по меньшей мере одной матрицы псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала,
выполнение QR-разложения по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов, и
определение по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов.
4. Способ по п.1, в котором посылка передачи данных содержит
выполнение кодирования и модуляции для передачи данных, основываясь на информации о CQI, и
выполнение предварительного кодирования для передачи данных, основываясь на по меньшей мере одной матрице предварительного кодирования.
5. Способ по п.1, в котором посылка первого опорного сигнала по первой линии связи содержит посылку характерного для соты опорного сигнала по нисходящей линии связи, и в котором прием второго опорного сигнала по второй линии связи содержит прием зондирующего опорного сигнала по восходящей линии связи.
6. Способ по п.1, в котором посылка первого опорного сигнала по первой линии связи содержит посылку зондирующего опорного сигнала по восходящей линии связи, и в котором прием второго опорного сигнала по второй линии связи содержит прием характерного для соты опорного сигнала по нисходящей линии связи.
7. Способ по п.1, в котором один из первого и второго опорных сигналов генерируется на основе псевдослучайной последовательности, и в котором другой один из первого и второго опорных сигналов генерируется на основе последовательности нулевой автокорреляции с постоянной амплитудой (CAZAC).
8. Способ по п.1, в котором посылка первого опорного сигнала содержит посылку первого опорного сигнала по поднесущим, разделенным посредством первого промежутка, и в котором прием второго опорного сигнала содержит прием второго опорного сигнала по поднесущим, разделенным посредством второго промежутка, отличного от первого промежутка.
9. Способ по п.1, в котором прием информации о CQI содержит прием по меньшей мере одного символа многостанционного доступа с ортогональным частотным разделением каналов на одной несущей (SC-FDMA-символа), содержащего информацию о CQI, и в котором посылка передачи данных содержит посылку по меньшей мере одного символа многостанционного доступа с ортогональным частотным разделением каналов (OFDMA-символа) для передачи данных.
10. Способ по п.1, в котором прием информации о CQI содержит прием по меньшей мере одного символа многостанционного доступа с ортогональным разделением каналов (OFDMA-символа), содержащего информацию о CQI, и в котором посылка передачи данных содержит посылку по меньшей мере одного символа многостанционного доступа с ортогональным частотным разделением каналов на одной несущей (SC-FDMA-символа) для передачи данных.
11. Устройство для беспроводной связи, содержащее:
по меньшей мере один процессор, сконфигурированный с возможностью посылки первого опорного сигнала по первой линии связи на приемник, приема информации об индикаторе качества канала (CQI), определенной приемником, основываясь на первом опорном сигнале, приема второго опорного сигнала по второй линии связи от приемника, получения по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала) для первой линии связи, основываясь на втором опорном сигнале, принимаемом по второй линии связи, определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала, и посылки передачи данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI.
12. Устройство по п.11, в котором по меньшей мере один процессор сконфигурирован с возможностью выполнения разложения по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов и определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов.
13. Устройство по п.11, в котором по меньшей мере один процессор сконфигурирован с возможностью формирования по меньшей мере одной матрицы псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала, выполнения QR-разложения по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов и определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов.
14. Устройство по п.11, в котором один из первого и второго опорных сигналов содержит характерный для соты опорный сигнал, посылаемый узлом В, и в котором другой один из первого и второго опорного сигнала содержит зондирующий опорный сигнал, посылаемый пользовательским оборудованием (UE).
15. Устройство для беспроводной связи, содержащее:
средство для посылки первого опорного сигнала по первой линии связи на приемник;
средство для приема информации об индикаторе качества канала (CQI), определенной приемником, основываясь на первом опорном сигнале;
средство для приема второго опорного сигнала по второй линии связи от приемника;
средство для получения по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала) для первой линии связи, основываясь на втором опорном сигнале, принимаемом по второй линии связи;
средство для определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала; и
средство для посылки передачи данных на приемник, основываясь на по меньшей мере одной матрице предварительного кодирования и информации о CQI.
16. Устройство по п.15, в котором средство для определения по меньшей мере одной матрицы предварительного кодирования содержит
средство для выполнения разложения по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов, и
средство для определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов.
17. Устройство по п.15, в котором средство для определения по меньшей мере одной матрицы предварительного кодирования содержит
средство для формирования по меньшей мере одной матрицы псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала,
средство для выполнения QR-разложения по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов, и
средство для определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов.
18. Устройство по п.15, в котором один из первого и второго опорных сигналов содержит характерный для соты опорный сигнал, посылаемый узлом В, и в котором другой один из первого и второго опорного сигнала содержит зондирующий опорный сигнал, посылаемый пользовательским оборудованием (UE).
19. Считываемая компьютером среда, содержащая:
код, вызывающий посылку по меньшей мере одним компьютером первого опорного сигнала по первой линии связи на приемник,
код, вызывающий прием по меньшей мере одним компьютером информации об индикаторе качества канала (CQI), определенной приемником, основываясь на первом опорном сигнале,
код, вызывающий прием по меньшей мере одним компьютером второго опорного сигнала по второй линии связи от приемника,
код, вызывающий получение по меньшей мере одним компьютером по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала) для первой линии связи, основываясь на втором опорном сигнале, принимаемом по второй линии связи,
код, вызывающий определение по меньшей мере одним компьютером по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице MIMO-канала; и
код, вызывающий посылку передачи данных по меньшей мере одним компьютером на приемник, основываясь на по меньшей мере матрице предварительного кодирования и информации о CQI.
20. Способ приема данных в системе беспроводной связи, содержащий:
прием первого опорного сигнала по первой линии связи от передатчика;
определение информации об индикаторе качества канала (CQI), основываясь на первом опорном сигнале;
посылку информации о CQI на передатчик;
посылку второго опорного сигнала по второй линии связи; и
прием передачи данных, посылаемой передатчиком, основываясь на информации о CQI и по меньшей мере одной матрице предварительного кодирования, определенной передатчиком, основываясь на втором опорном сигнале.
21. Способ по п.20, также содержащий:
получение по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала), основываясь на первом опорном сигнале;
определение по меньшей мере одной матрицы обнаружения, основываясь на по меньшей мере одной матрицы MIMO-канала; и
выполнение обнаружения MIMO для принимаемой передачи данных, основываясь на по меньшей мере одной матрице обнаружения.
22. Способ по п.20, также содержащий:
получение по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала), основываясь на первом опорном сигнале;
выполнение разложения по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов, и
определение по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов, и в котором определение информации о CQI содержит определение информации о CQI, основываясь на по меньшей мере одной матрице предварительного кодирования.
23. Способ по п.20, также содержащий:
получение по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала), основываясь на первом опорном сигнале;
формирование по меньшей мере одной матрицы псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала,
выполнение QR-разложения по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов, и
определение по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов, и в котором определение информации о CQI содержит определение информации о CQI, основываясь на по меньшей мере одной матрице предварительного кодирования.
24. Способ по п.20, в котором один из первого и второго опорных сигналов содержит характерный для соты опорный сигнал, посылаемый узлом В, и в котором другой один из первого и второго опорного сигнала содержит зондирующий опорный сигнал, посылаемый пользовательским оборудованием (UE).
25. Способ по п.20, в котором один из первого и второго опорных сигналов генерируется на основе псевдослучайной последовательности, и в котором другой один из первого и второго опорных сигналов генерируется на основе последовательности нулевой автокорреляции с постоянной амплитудой (CAZAC).
26. Способ по п.20, в котором посылка информации о CQI содержит посылку по меньшей мере одного символа многостанционного доступа с ортогональным частотным разделением каналов на одной несущей (SC-FDMA-символа), содержащего информацию о CQI, и в котором прием передачи данных содержит прием по меньшей мере одного символа многостанционного доступа с ортогональным частотным разделением каналов (OFDMA-символа) для передачи данных.
27. Устройство для беспроводной связи, содержащее:
по меньшей мере один процессор, сконфигурированный с возможностью приема первого опорного сигнала по первой линии связи от передатчика, определения информации об индикаторе качества канала (CQI), основываясь на первом опорном сигнале, посылки информации о CQI на передатчик, посылки второго опорного сигнала по второй линии связи, и приема передачи данных, посылаемой передатчиком, основываясь на информации о CQI и по меньшей мере одной матрице предварительного кодирования, определенной передатчиком, основываясь на втором опорном сигнале.
28. Устройство по п.27, в котором по меньшей мере один процессор сконфигурирован с возможностью получения по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала), основываясь на первом опорном сигнале, выполнения разложения по сингулярным числам по меньшей мере одной матрицы MIMO-канала для получения по меньшей мере одной матрицы собственных векторов, определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице собственных векторов, и определения информации о CQI, основываясь на по меньшей мере одной матрице предварительного кодирования.
29. Устройство по п.27, в котором по меньшей мере один процессор сконфигурирован с возможностью получения по меньшей мере одной матрицы канала с многими входами и многими выходами (MIMO-канала), основываясь на первом опорном сигнале, формирования по меньшей мере одной матрицы псевдолуча, основываясь на по меньшей мере одной матрице MIMO-канала, выполнения QR-разложения по меньшей мере одной матрицы псевдолуча для получения по меньшей мере одной матрицы ортогональных векторов, определения по меньшей мере одной матрицы предварительного кодирования, основываясь на по меньшей мере одной матрице ортогональных векторов, и определения информации о CQI, основываясь на по меньшей мере одной матрице предварительного кодирования.
30. Устройство по п.27, в котором один из первого и второго опорных сигналов содержит характерный для соты опорный сигнал, посылаемый узлом В, и в котором другой один из первого и второго опорного сигнала содержит зондирующий опорный сигнал, посылаемый пользовательским оборудованием (UE).
| US 2007099578 A1, 03.05.2007 | |||
| WO 2006130865 A, 07.12.2006 | |||
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ДАННЫХ В СИСТЕМЕ СВЯЗИ С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO) С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИИ О СОСТОЯНИИ КАНАЛА | 2002 |
|
RU2292116C2 |
| RU 2005121540 A, 27.01.2006 | |||
| US 2007160156 A1, 12.07.2007. | |||

