По настоящей заявке испрашивается приоритет в соответствии с предварительный заявкой на патент США №60/955622, под названием "METHODS AND APPARATUSES FOR FEEDBACK MECHANISM AND RATE ADAPTATION FOR TIME DIVISION DUPLEX (TDD) MIMO SYSTEMS", поданной 13 августа 2007 г., переуступленной правопреемнику настоящей заявки и включенной в настоящее описание в качестве ссылки.
Предшествующий уровень техники
I. Область техники, к которой относится изобретение
Настоящее раскрытие в общем относится к связи и более конкретно к технологиям передачи и приема данных в системе беспроводной связи.
II. Описание предшествующего уровня техники
В системе беспроводной связи в передатчике может использоваться множество (T) передающих антенн для передачи данных в приемник, оборудованный множеством (R) приемных антенн. Множество передающих и приемных антенн для канала с множеством входов и множеством выходов (MIMO) можно использовать для повышения пропускной способности и/или улучшения надежности. Например, передатчик может передавать вплоть до T потоков символов одновременно из T передающих антенн для улучшения пропускной способности. В качестве альтернативы, передатчик может передавать одиночный поток символов через все T передающих антенн для улучшения приема приемником.
Для обеспечения хороших рабочих показателей приемник может выполнять оценку характеристики канала MIMO и определять матрицу предварительного кодирования, используемую для MIMO-передачи. Приемник также может определять индикатор качества канала (CQI) или схему модуляции и кодирования (MCS) для каждого потока символов, передаваемых при MIMO-передаче. Приемник может передавать информацию обратной связи в передатчик. Эта информация обратной связи может включать в себя матрицу предварительного кодирования, а также CQI или MCS для каждого потока символов. Информация обратной связи полезна для передатчика, но представляет собой служебные сигналы. Желательно уменьшить объем информации обратной связи, передаваемой для MIMO-передачи.
Сущность изобретения
Ниже описаны технологии передачи информации при передаче MIMO-передаче с меньшими объемами служебной информации, передаваемой как обратная связь в системе беспроводной связи. В одном аспекте служебная информация обратной связи может быть уменьшена, когда как передатчик, так и приемник определяют матрицу предварительного кодирования, предназначенную для использования для MIMO-передачи. Это может быть достигнуто при использовании обратимости канала, благодаря дуплексной связи с временным разделением каналов в системе.
В одной конструкции передатчик может передавать первый опорный сигнал или пилот-сигнал в приемник. Приемник может выбрать матрицу предварительного кодирования на основе первого опорного сигнала и в соответствии с критерием выбора. В одной конструкции приемник может получать матрицу канала MIMO на основе первого опорного сигнала и может получать матрицу формирования луча на основе (например, путем выполнения сингулярного разложения) матрицы канала MIMO. Приемник может затем выбрать матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча и в соответствии с критерием выбора, например, на основе ближайшего расстояния между матрицей формирования луча и матрицей предварительного кодирования. Приемник может выполнять оценку шумов и взаимных помех в приемнике. Приемник может определять количество передаваемых потоков (S) символов и информацию CQI или MCS для S потоков символов на основе матрицы предварительного кодирования, оценки шумов и взаимных помех и, возможно, другой информации. Приемник может передавать в передатчик информацию CQI или MCS и второй опорный сигнал или пилот-сигнал.
Передатчик может выбирать матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с тем же критерием выбора, используемым приемником. Передатчик может затем отправлять MIMO-передачу в приемник на основе информации CQI или MCS, получаемой из приемника и матрицы предварительного кодирования, выбранной передатчиком. Передатчик может кодировать и модулировать S потоков символов в соответствии с информацией CQI или MCS и может выполнять предварительное кодирование этих потоков символов на основе матрицы предварительного кодирования.
Технологии, описанные здесь, можно использовать для MIMO-передачи по нисходящей линии связи, а также по восходящей линии связи. Различные аспекты и свойства раскрытия более подробно описаны ниже.
Краткое описание чертежей
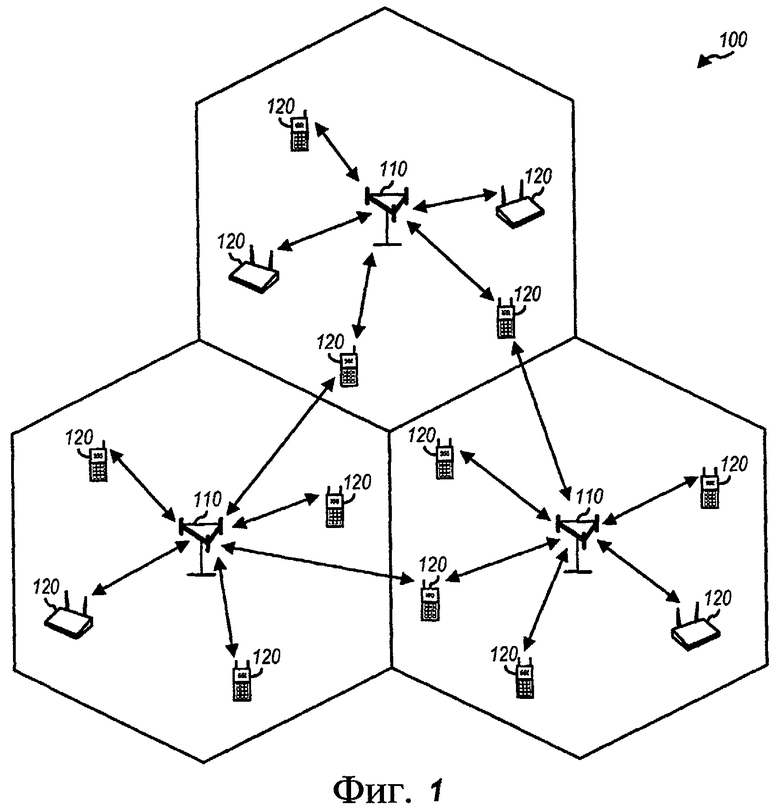
На фиг.1 показана система беспроводной связи.
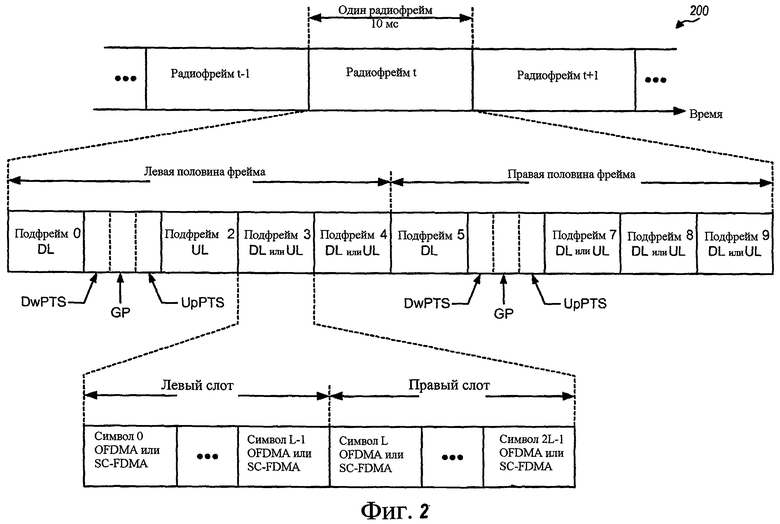
На фиг.2 показан пример структуры фрейма.
На фиг.3 показаны передатчик и приемник для MIMO-передачи.
На фиг.4 показана обработка для передачи MIMO-передачи.
На фиг.5 показано устройство для передачи MIMO-передачи.
На фиг.6 показана обработка для приема MIMO-передачи.
На фиг.7 показано устройство для приема MIMO-передачи.
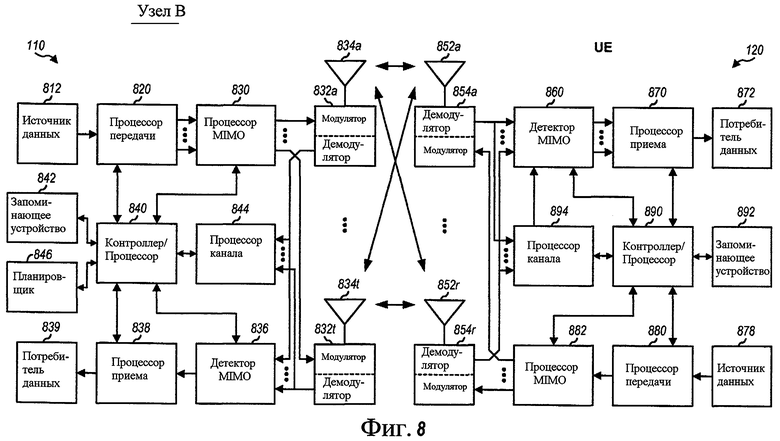
На фиг.8 показана блок-схема узла В (Node B) и UE.
Подробное описание изобретения
Технологии, описанные здесь, можно использовать для различных систем беспроводной передачи данных, таких как системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы ортогонального FDMA (OFDMA), системы FDMA с одиночной несущей (SC-FDMA) и другие системы. Термины "система" и "сеть" часто используются взаимозаменяемо. Система CDMA может воплощать такую радиотехнологию, как универсальный наземный радиодоступ (UTRA), cdma2000 и т.д. UTRA включает в себя широкополосный CDMA (WCDMA) и другие варианты CDMA. cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. Система TDMA может воплощать такую радиотехнологию, как Глобальная система мобильной связи (GSM). Система OFDMA может воплощать такую радиотехнологию, как усовершенствованная UTRA (E-UTRA), ультрамобильная широкополосная сеть (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA и E-UTRA представляют собой часть универсальной системы мобильной связи (UMTS). Долговременное развитие (LTE) 3GPP представляет собой будущий выпуск UMTS, в которой используется E-UTRA, в которой используется OFDMA по нисходящей линии связи и SC-FDMA по восходящей линии связи. UTRA, E-UTRA, UMTS, LTE и GSM описаны в документах организации под названием "Проект Партнерства 3-го поколения" (3GPP). cdma2000 и UMB описаны в документах организации под названием "Проект 2 Партнерства 3-го поколения" (3GPP2). Для ясности некоторые аспекты технологий описаны ниже для передачи данных в LTE, и терминология LTE используется в большей части приведенного ниже описания.
На фиг.1 показана система 100 беспроводной связи, которая может представлять собой систему LTE. Система 100 может включать в себя множество узлов B 110 и других сетевых объектов.
Узел В может представлять собой стационарную станцию, которая связывается с пользовательскими устройствами (UE), и также может называться усовершенствованным узлом В (eNB), базовой станцией, точкой доступа и т.д. Каждый узел В 110 обеспечивает зону обслуживания в определенной географической области. Общая зона обслуживания узла В может быть разделена на множество (например, три) меньших областей. Каждая меньшая область может обслуживаться соответствующей подсистемой узла В. В 3GPP термин "сота" также относится к наименьшей зоне обслуживания узла В и/или в подсистеме узла В, обслуживающей эту зону обслуживания.
UE 120 могут быть распределены по системе, и каждое UE может быть стационарным или мобильным. UE также может называться мобильной станцией, терминалом, терминалом доступа, модулем абонента, станцией и т.д. UE может представлять собой сотовый телефон, карманный персональный компьютер (PDA, КПК), беспроводной модем, беспроводное устройство связи, портативное устройство, переносной компьютер, беспроводной телефон и т.д. UE может связываться с узлом В через нисходящую линию связи и восходящую линию связи. Нисходящая (или прямая) линия связи относится к линии связи от узла В к UE, и восходящая (или обратная) линия связи относится к линии связи от UE к узлу В.
В системе может использоваться дуплексная связь с временным разделением каналов (TDD). Для TDD нисходящая линия связи и восходящая линии связи могут совместно использовать один и тот же частотный канал, и характеристика канала нисходящей линии связи может быть скоррелирована с характеристикой канала восходящей линии связи.
На фиг.2 показан пример структуры 200 фрейма, который можно использовать для TDD в LTE. Ось времени передачи может быть разделена на модули радиофреймов. Каждый радиофрейм может иметь заданную длительность (например, 10 миллисекунд (мс)) и может быть разделен на 10 подфреймов с индексами от 0 до 9. LTE поддерживает множество конфигураций нисходящей-восходящей линий связи. Подфреймы 0 и 5 могут использоваться для нисходящей (DL) линии связи, и подфрейм 2 может использоваться для восходящей линии (UL) связи для всех конфигураций нисходящей-восходящей линии связи. Подфреймы 3, 4, 7, 8 и 9 каждый может использоваться для нисходящей или восходящей линий связи, в зависимости от конфигурации нисходящей-восходящей линий связи. Подфрейм 1 может включать в себя три специальных поля, состоящих из временного слота пилот-сигнала нисходящей линии связи (DwPTS), используемой для каналов управления нисходящей линии связи, а также для передачи данных, защитного периода (GP), в течение которого отсутствует передача, и временного слота пилот-сигнала восходящей линии связи (UpPTS), используемой либо для канала случайного доступа (RACH), либо для опорных сигналов зондирования (SRS). Подфрейм 6 может включать в себя только DwPTS, или все три специальных поля, или подфрейм нисходящей линии связи, в зависимости от конфигурации нисходящей-восходящей линии связи. DwPTS, GP и UpPTS могут иметь различную длительность для разных конфигураций подфрейма.
Каждый подфрейм, который не используется для специальных полей, может быть разделен на два слота. Каждый слот может включать в себя L периодов символа, например L=6 периодов символа для расширенного циклического префикса или L=7 периодов символа для нормального циклического префикса. Структура 200 фрейма описана в публикации 3GPP TS 36.211 под названием "Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation", которая общедоступна.
В LTE используется мультиплексирование с ортогональным частотным разделением каналов (OFDM) по нисходящей линии связи и мультиплексирование с частотным разделением каналов на одиночной несущей (SC-FDM) по восходящей линии связи. В OFDM и SC-FDM полосы пропускания системы разделяются на множество (K) ортогональных поднесущих, которые также, в общем, называются тонами, элементами сигнала и т.д. Каждая поднесущая может быть модулирована данными. В общем, символы модуляции передаются в частотной области, используя OFDM, и во временной области, используя SC-FDM. Промежуток между соседними поднесущими может быть фиксированным, и общее количество поднесущих (K) может зависеть от ширины полосы пропускания системы. Например, K может быть равным 128, 256, 512, 1024 или 2048 для ширины полосы пропускания системы 1,25, 2,5, 5, 10 или 20 МГц соответственно.
Общее количество K поднесущих может быть сгруппировано в блоки ресурса. Каждый блок ресурса может включать в себя N поднесущих (например, N=12 поднесущих) в одном слоте. Доступные блоки ресурса могут быть назначены устройствам UE для передачи данных и информации управления. Общее количество K поднесущих также может быть разделено на подполосы. Каждая подполоса может включать в себя 72 поднесущих в 6 блоках ресурса, охватывающих 1,08 МГц.
Узел B может периодически передавать опорный сигнал нисходящей линии связи, который может представлять собой опорный сигнал, специфичный для конкретной соты, для всех UE в пределах соты узла В, или опорный сигнал, специфичный для UE, для конкретного UE. UE может быть сконфигурировано так, чтобы оно периодически передавало опорный сигнал зондирования в узел В. Опорный сигнал представляет собой сигнал, который заранее известен как в передатчике, так и в приемнике. Опорный сигнал также может называться пилот-сигналом, преамбулой, зондированием, тренировкой и т.д. Узел В может передавать опорный сигнал нисходящей линии связи по всей или части полосы пропускания системы. UE может использовать опорный сигнал нисходящей линии связи для оценки канала с целью оценки характеристики канала нисходящей линии связи и качества нисходящей линии связи для узла В. UE может передавать опорный сигнал зондирования в подполосе в подфрейме. UE может циклически последовательно использовать все подполосы и передавать опорный сигнал зондирования в разных подполосах в различных подфреймах. Узел В может использовать опорный сигнал зондирования для оценки канала с целью оценки характеристики канала восходящей линии связи и качества восходящей линии связи для UE. Опорный сигнал нисходящей линии связи и опорный сигнал зондирования могут быть сгенерированы и могут быть переданы, как описано в упомянутом выше 3GPP TS 36.211. Другие опорные сигналы и пилот-сигналы также могут быть переданы по нисходящей и восходящей линиям связи для поддержки оценки канала.
Передатчик может отправлять MIMO-передачу в приемник. Приемник может выполнять оценку характеристики канала MIMO и определять матрицу предварительного кодирования для использования при MIMO-передаче. Приемник может также выполнять выбор ранга и определять ранг или количество потоков (S) символов для отправки в рамках передачи данных MIMO, где 1<S<min{T, R}, T представляет собой количество антенн в передатчике и R представляет собой количество антенн в приемнике. Приемник также может выполнять выбор скорости передачи данных и определять CQI или MCS для каждого потока символов. CQI и MCS могут предоставлять эквивалентную информацию, и их можно использовать для выбора схемы кодирования или кодовой скорости, а также схемы модуляции для потока символов, чтобы достичь требуемой надежности, например целевой частоты ошибок по пакетам (PER). Приемник может передавать информацию обратной связи, содержащую матрицу предварительного кодирования и значение CQI/MCS для каждого потока символов. Ранг может быть предоставлен неявно по размерности матрицы предварительного кодирования или может представлять собой количество значений CQI/MCS, переданных приемником. Передатчик может обрабатывать (например, кодировать и модулировать) каждый поток символов в соответствии со значением CQI/MCS для этого потока символов. Передатчик может дополнительно выполнять предварительное кодирование для всех S потоков символов на основе матрицы предварительного кодирования и может затем отправлять MIMO-передачу, содержащую S предварительно кодированных потоков символов, в приемник. Служебные данные обратной связи могут быть объемными, чтобы в них могли быть переданы как матрица предварительного кодирования, так и значение CQI/MCS для каждого потока символов.
В одном аспекте служебные данные обратной связи для MIMO-передачи в системе TDD могут быть уменьшены, когда как передатчик, так и приемник определяют матрицу предварительного кодирования для использования для MIMO-передачи. Это может быть достигнуто путем использования обратимости канала MIMO в системе TDD, как описано ниже. Приемник может определять значение CQI/MCS для каждого потока символов на основе выбранной матрицы предварительного кодирования и шумов и взаимных помех, оценка которых была получена приемником. Приемник может передавать информацию обратной связи, содержащую только значение CQI/MCS для каждого потока символов. Служебные данные обратной связи могут быть уменьшены путем неотправки матрицы предварительного кодирования.
На фиг.3 показана конструкция обработки для MIMO-передачи из передатчика 310 в приемник 320 с уменьшенным объемом служебных данных обратной связи. Для MIMO-передачи по нисходящей линии связи передатчик 310 может представлять собой узел В, и приемник 320 может представлять собой UE. Для MIMO-передачи по восходящей линии связи передатчик 310 может представлять собой UE, и приемник 320 может представлять собой узел В. MIMO-передача может быть отправлена по множеству поднесущих, и обработка в передатчике 310 и приемнике 320 может повторяться для каждой поднесущей. Для простоты большая часть приведенного ниже описания относится к одной поднесущей.
Передатчик 310 может передавать первый опорный сигнал через все T антенн в передатчике (этап 1). Первый опорный сигнал может представлять собой опорный сигнал нисходящей линии связи, если передатчик 310 представляет собой узел В, или опорный сигнал зондирования, если передатчик 310 представляет собой UE. Приемник 320 может принимать первый опорный сигнал через все R антенн в приемнике. Приемник 320 может выполнять оценку характеристики канала MIMO из передатчика 310 в приемник 320 на основе первого опорного сигнала (этап 2). Приемник 320 может получать матрицу H R×T канала MIMO, которая может быть выражена следующим образом:
 Ур. (1)
Ур. (1)
где запись hi,j для i=1,… R и j=1,… T представляет собой комплексный коэффициент усиления между антенной j и передатчиком 310 и антенной i в приемнике 320.
Передатчик 310 может передавать данные по множеству поднесущих в одном или больше блоках ресурса. Приемник 320 может получать матрицу канала MIMO для каждой поднесущей, представляющей интерес, например для каждой поднесущей, используемой для передачи данных. Приемник 320 также может выполнять оценку шумов и взаимных помех в приемнике (например, для каждого блока ресурса, который может использоваться для передачи данных) на основе первого опорного сигнала и/или других принятых символов (этап 3).
Приемник 320 может выбирать матрицу W предварительного кодирования на основе матрицы H канала MIMO и в соответствии с критерием выбора (этап 4). В одной конструкции приемник 320 может диагонализировать матрицу канала MIMO, используя сингулярное разложение следующим образом:
 Ур. (2)
Ур. (2)
где U представляет собой единичную матрицу R×R левых собственных векторов H,
V представляет собой единичную матрицу T×T правых собственных векторов H,
∑ представляет собой диагональную матрицу R×T сингулярных значений H и
"H" обозначает эрмитово или сопряженное транспонирование.
Все столбцы единичной матрицы ортогональны друг другу, и каждый столбец имеет единичный порядок. Диагональная матрица имеет возможные ненулевые значения, размещенные вдоль диагонали, и нулевые значения в других местах. Матрица V также может быть названа матрицей формирования луча. Приемник 320 также может получать матрицу V формирования луча, выполняя разложение по собственным значениям ковариационной матрицы H. Разложение по собственным значениям может быть выражено как H H, H=V Λ V H, где Λ=∑H ∑ и Λ - диагональная матрица собственных значений H.
Передатчик 310 может выполнять предварительное кодирование с матрицей V формирования луча для передачи данных по собственным модам H. Собственные моды можно рассматривать как ортогональные пространственные каналы. Сингулярные значения в ∑ обозначены коэффициентами усиления канала собственных мод H. Количество собственных мод (M) может быть задано как М≤min{T, R}. Передатчик 310 может передавать вплоть до М потоков символов по вплоть до М собственным модам, используя вплоть до М столбцов матрицы V формирования луча. Хорошие рабочие показатели могут быть достигнуты при передаче данных по собственным модам H.
Набор матриц предварительного кодирования может поддерживаться и может называться кодовой книгой. В одной конструкции может быть выбрана матрица предварительного кодирования в кодовой книге, которая расположена ближе всего к матрице V формирования луча. Метрика расстояния может быть рассчитана для каждой матрицы предварительного кодирования в кодовой книге следующим образом:
 Ур. (3)
Ур. (3)
где Vi,j представляет собой (i,j)-й элемент матрицы V формирования луча, то есть элемент в i-й строке и j-м столбце матрицы V,
Wl,i,j представляет собой (i,j)-й элемент l-й матрицы предварительного кодирования в кодовой книге и
Dl представляет собой метрику расстояния для l-й матрицы предварительного кодирования.
Конструкция в уравнении (3) предполагает, что приемник 320 получил одну матрицу канала MIMO. Если приемник 320 получает множество матриц канала MIMO для множества поднесущих, тогда метрика расстояния может быть задана как
где Vi,j(k) представляет собой (i,j)-й элемент матрицы формирования луча для поднесущей k.
Показатель расстояния в уравнении (3) может обозначать расстояние между матрицей V формирования луча и матрицей предварительного кодирования в кодовой книге. Показатель расстояния может быть рассчитан для каждой матрицы предварительного кодирования в кодовой книге. Матрица предварительного кодирования с наименьшим показателем расстояния среди всех матриц предварительного кодирования может быть выбрана в кодовой книге. Выбранная матрица W предварительного кодирования может представлять собой ближайшую аппроксимацию для матрицы V формирования луча.
В конструкции, описанной выше, приемник 320 может выбирать матрицу предварительного кодирования на основе критерия выбора выбранной матрицы предварительного кодирования, которая расположена ближе всего к матрице формирования луча среди всех матриц предварительного кодирования в кодовой книге. В другой конструкции приемник 320 может выбрать матрицу предварительного кодирования на основе матрицы канала MIMO, в соответствии с технологией псевдоформирования собственного луча, описанной в совместно переуступленной заявке на патент США №11/317413, под названием "PSEUDO EIGEN-BEAMFORMING WITH DYNAMIC BEAM SELECTION", поданной 22 декабря 2005 г. Приемник 320 также может выбирать матрицу предварительного кодирования на основе некоторого другого критерия выбора.
Приемник 320 может выбирать матрицу предварительного кодирования исключительно на основе матрицы H канала MIMO, как описано выше. Приемник 320 также может выбирать матрицу предварительного кодирования на основе другой информации, такой как ковариационная матрица шумов.
Приемник 320 может определять количество потоков символов для передачи и значение CQI/MCS для каждого потока символов на основе выбранной матрицы W предварительного кодирования, матрицы H канала MIMO, оценки шумов и взаимных помех и доступной мощности передачи (этап 5). Каждый поток символов может быть передан на одном уровне. Каждый уровень может соответствовать собственной моде H, если выбранная матрица W предварительного кодирования похожа на матрицу V формирования луча. Приемник 320 может устанавливать гипотезу, что передатчик 310 будет передавать данные, используя выбранную матрицу W предварительного кодирования. Принятые символы в приемнике 320 могут быть затем выражены как:
 Ур. (4)
Ур. (4)
где d представляет собой вектор T×1 символов данных,
G представляет собой диагональную матрицу T×T коэффициента усиления символов данных,
H eff = HWG представляет собой эффективный канал MIMO R×T, наблюдаемый символами данных,
r представляет собой вектор R×1 принятых символов и
n представляет собой вектор R×1 шумов и взаимных помех.
Шумы и взаимные помехи могут иметь ковариационную матрицу R nn=E{nn H}, где E{} обозначает математическое ожидание. Можно предположить, что шумы и взаимные помехи представляют собой аддитивный гауссов белый шум (AWGN) с нулевым средним вектором и ковариационной матрицей R nn=σ2 n I, где σ2 n представляет собой дисперсию шумов и взаимных помех. Приемник 320 может оценивать шумы и взаимные помехи на основе первого опорного сигнала и/или других принятых символов. Приемник 320 может усреднять результаты измерения шумов и взаимных помех в течение соответствующего периода времени для получения дисперсии шумов или ковариационной матрицы шумов.
Приемник 320 может выполнять детектирование MIMO на основе минимальной среднеквадратической ошибки (MMSE), обращения в нуль незначащих коэффициентов матрицы, MMSE с последовательным сокращением взаимных помех или на основе некоторой другой технологии детектирования MIMO. Для MMSE приемник 320 может выводить матрицу М детектирования T×R следующим образом:
 Ур. (5)
Ур. (5)
где
 и
и
Q=[diagZ]-1 представляет собой диагональную матрицу значений масштабирования для получения нормализованных оценок символов.
Приемник 320 может выполнять детектирование MIMO следующим образом:
 Ур. (6)
Ур. (6)
где  представляет собой вектор T×1 оценок символа и представляет собой оценку вектора d данных, передаваемых передатчиком 310. Если данные передаются по множеству поднесущих, тогда приемник 320 может получать матрицу М(k) детектирования для каждой поднесущей k на основе матрицы H(k) канала MIMO для этой поднесущей и выбранной матрицы W предварительного кодирования. Приемник 320 затем может выполнить детектирование MIMO для каждой поднесущей k на основе матрицы М (k) детектирования для этой поднесущей.
представляет собой вектор T×1 оценок символа и представляет собой оценку вектора d данных, передаваемых передатчиком 310. Если данные передаются по множеству поднесущих, тогда приемник 320 может получать матрицу М(k) детектирования для каждой поднесущей k на основе матрицы H(k) канала MIMO для этой поднесущей и выбранной матрицы W предварительного кодирования. Приемник 320 затем может выполнить детектирование MIMO для каждой поднесущей k на основе матрицы М (k) детектирования для этой поднесущей.
Приемник 320 может определить отношение сигнала к шумам и помехам (SINR) для каждого уровня следующим образом:
 для s=1,…, S, Ур. (7)
для s=1,…, S, Ур. (7)
где zs представляет собой s-й диагональный элемент матрицы Z и SINRs представляет собой SINR уровня s.
SINR каждого уровня может зависеть от технологии детектирования MIMO, используемой приемником 320. Различные технологии детектирования MIMO могут быть ассоциированы с другими уравнениями для расчета SINR. Если данные передаются по множеству поднесущих, тогда приемник 320 может определять SINR каждого уровня s для каждой поднесущей k на основе матрицы Z(k) для этой поднесущей.
Приемник 320 может выполнять выбор ранга для выбора одного или больше уровней, используемых для передачи данных. Приемник 320 может выполнять оценку каждой возможной комбинации уровней, которые можно использовать для передачи данных. Для заданной комбинации уровней или гипотезы приемник 320 может выделять доступную мощность Pavail передачи для S уровней в этой комбинации на основе равномерного выделения мощности, так, чтобы Ps=Pavail/S могла быть выделена для каждого уровня. Выделение мощности также может быть основано на технологии "разбавления" (water-fillinq) или некоторой другой технологии. Доступная мощность передачи может зависеть от разности между мощностью передачи для нисходящей линии связи и мощностью передачи для восходящей линии связи. Эта разность мощностей может быть известна или может быть установлена как в передатчике 310, так и в приемнике 320. Доступная мощность передачи может быть задана по разности между мощностью передачи для данных (которая может быть отражена в матрице G усиления) и мощностью передачи для первого опорного сигнала (которая может быть отражена в матрице H канала MIMO). В любом случае, приемник 320 может определить матрицу G усиления на основе мощности передачи, выделенной для S уровней. Матрица G усиления может включать в себя ненулевое усиление для каждого выбранного уровня и нулевое усиление для каждого невыбранного уровня. Приемник 320 может затем определять эффективную матрицу H eff канала MIMO на основе матрицы H канала MIMO для матрицы W предварительного кодирования и матрицы G усиления. Приемник 320 может определять SINR для S уровней на основе эффективной матрицы H eff канала MIMO и ковариационной матрицы R nn шумов, как описано выше. Приемник 320 может рассчитать метрические данные, такие как общая пропускная способность, на основе значений SINR для S уровней для текущей гипотезы.
Приемник 320 может повторять комбинацию, описанную выше, для каждой возможной комбинации уровней и может получать общую пропускную способность для каждой комбинации. Приемник 320 может выбрать комбинацию уровней с наибольшей общей пропускной способностью. Приемник 320 может преобразовать SINR каждого уровня в выбранной комбинации в значение CQI на основе заранее заданного отображения. В качестве альтернативы, приемник 320 может выбрать значение MCS для каждого уровня на основе SINR этого уровня, используя заранее заданное отображение. Приемник 320 может получить S значений CQI или S значений MCS для S уровней в выбранной комбинации. Эти S значений CQI/MCS могут отображать как выбранную матрицу W предварительного кодирования, так и оценку шумов и взаимных помех в приемнике 320. Приемник 320 может передавать информацию CQI/MCS, содержащую S значений CQI/MCS для S уровней, в передатчик 310 (этап 6).
Приемник 320 также может передавать второй опорный сигнал через R антенн в приемнике (этап 7). Второй опорный сигнал может представлять собой опорный сигнал зондирования, если приемник 320 представляет собой UE, или опорный сигнал нисходящей линии связи, если приемник 320 представляет собой узел В.
Передатчик 310 может принимать второй опорный сигнал через T антенн в передатчике. Передатчик 310 может выполнять оценку характеристики канала MIMO из приемника 320 в передатчик 310 на основе второго опорного сигнала (этап 8). Для системы TDD канал MIMO из приемника 320 в передатчик 310 можно предположить как обратимый с каналом MIMO из передатчика 310 в приемник 320. Матрица канала MIMO, получаемая передатчиком 310, может быть задана как H T, где "T" обозначает транспонирование.
Общий канал MIMO из передатчика 310 в приемник 320 может состоять из цепей передачи для T антенн в передатчике 310, канала MIMO и цепей приема для R антенн в приемнике 320. Общий канал MIMO из приемника 320 в передатчик 310 может состоять из цепей передачи для R антенн в приемнике 320, канала MIMO и цепей приема для T антенн в передатчике 310. Характеристики цепей передачи и приема в передатчике 310 могут не соответствовать характеристикам цепей передачи и приема в приемнике 320. Может быть выполнена калибровка для определения матрицы калибровки, которая может применяться (например, в передатчике 310) для учета различий между характеристиками цепей передачи и приема в передатчике 310 и в приемнике 320. Калибровка может быть выполнена, как описано в совместно переуступленной заявке на патент США №10/693169, под названием "CHANNEL CALIBRATION FOR A TIME DIVISION DUPLEXED COMMUNICATION SYSTEM," поданной 23 октября 2003 г. При использовании матрицы калибровки общий канал MIMO из передатчика 310 в приемник 320 можно рассматривать как взаимно обратный с общим каналом MIMO из приемника 320 в передатчик 310. Для простоты в следующем описании предполагается, что цепи передачи и приема имеют плоские характеристики и что матрица калибровки представляет собой единичную матрицу. Передатчик 310 может использовать транспонированную матрицу H T канала MIMO, полученную передатчиком 310, как оценку матрицы H канала MIMO, полученную приемником 320.
Передатчик 310 может выбрать матрицу W предварительного кодирования на основе матрицы H канала MIMO, полученной передатчиком 310, и в соответствии с тем же критерием выбора, используемым приемником 320 (этап 9). Для конструкции, описанной выше, передатчик 310 может выполнять сингулярное разложение матрицы H канала MIMO для получения матрицы V формирования луча, как показано в уравнении (2). Передатчик 310 затем может выбрать матрицу W предварительного кодирования на основе критерия выбора выбранной матрицы W предварительного кодирования, которая расположена ближе всего к матрице V формирования луча из всех матриц предварительного кодирования в кодовой книге, как описано выше. Передатчик 310 и приемник 320 могут быть выполнены с возможностью выбора одной и той же матрицы W предварительного кодирования благодаря тому, что (i) матрица канала MIMO, полученная передатчиком 310, аналогична матрице канала MIMO, полученной приемником 320, благодаря обратимости канала, и (ii) один и тот же критерий выбора используется как передатчиком 310, так и приемником 320.
Принятые символы для MIMO-передач по нисходящей и восходящей линиям связи могут быть выражены как:
 Ур. (8a)
Ур. (8a)
 Ур. (8b)
Ур. (8b)
где H DL и H UL представляют собой матрицы канала MIMO для нисходящей и восходящей линий связи соответственно,
x DL и x UL представляют собой векторы переданных символов для нисходящей и восходящей линий связи,
r DL и r UL представляют собой векторы принятых символов для нисходящей и восходящей линий связи и
n DL и n UL представляют собой векторы шумов и взаимных помех для нисходящей и восходящей линий связи.
Для системы TDD матрица канала MIMO, полученная передатчиком 310, может быть обратной матрицей для матрицы канала MIMO, полученной приемником 320. Такая обратимость может привести к H T DL=H UL в наборе (8) уравнений. Однако шумы и взаимные помехи, наблюдаемые приемником 320, могут не соответствовать шумам и взаимным помехам, наблюдаемым передатчиком 310. В результате этого n DL может отличаться от n UL в наборе (8) уравнений. В одной конструкции различие в шумах и взаимных помехах можно учесть путем определения с помощью приемника 320 значения CQI/MCS для каждого уровня на основе шумов и взаимных помех, наблюдаемых приемником 320. Кроме того, приемник 320 может определять значение CQI/MCS для каждого уровня на основе технологии детектирования MIMO, используемой приемником 320, которая может быть неизвестна для передатчика 310. Для этой конструкции передатчик 310 может использовать значение CQI/MCS, предоставляемое приемником 320 для каждого уровня. В другой конструкции приемник 320 может передавать в передатчик 310 информацию, обозначающую шумы и взаимные помехи, наблюдаемые приемником 320. Эта информация может содержать дисперсию σ2 n шумов, ковариационную матрицу R nn шумов или некоторую другую информацию. Передатчик 310 может затем определять значение CQI/MCS для каждого уровня на основе информации, принятой из приемника 320. В еще одной конструкции приемник 320 может передавать в передатчик 310 информацию, обозначающую различия между шумами и взаимными помехами, наблюдаемыми приемником 320, и шумами и помехами, наблюдаемыми передатчиком 310. Эта информация может содержать CQI, MCS, дисперсию шумов или некоторую другую информацию, которую может использовать передатчик 310 для сравнения с соответствующими CQI, MCS, дисперсией шумов и т.д., получаемыми передатчиком 310. Передатчик 310 может затем определять значение CQI/MCS для каждого уровня на основе шумов и взаимных помех, наблюдаемых передатчиком 310, и информации, принятой из приемника 320. Для ясности, в следующем описании предполагается конструкция, в которой приемник 320 передает информацию CQI/MCS в передатчик 310.
Передатчик 310 может передавать S потоков символов по S уровням и может обрабатывать (например, кодировать и модулировать) каждый поток символов на основе значения CQI/MCS для этого потока символов (этап 10). В одной конструкции передатчик 310 может обрабатывать S потоков символов, основанных непосредственно на значениях CQI/MCS, полученных из приемника 320. В другой конструкции передатчик 310 может регулировать значения CQI/MCS, например, для учета любого различия между мощностью передачи, предполагаемой в приемнике 320, при определении значений CQI/MCS, и мощностью передачи, фактически используемой передатчиком 310. Передатчик 310 может затем обрабатывать S потоков символов на основе полученных значений CQI/MCS.
Передатчик 310 может масштабировать S потоков символов на основе мощности передачи, используемой для этих потоков символов. Передатчик 310 также может выполнять предварительное кодирование для S потоков символов на основе матрицы W предварительного кодирования, выбранной передатчиком 310 (также этап 10). Масштабирование символа и предварительное кодирование могут быть выражены следующим образом:
 Ур. (9)
Ур. (9)
где x представляет собой вектор T×1 переданных символов. Передатчик 310 может затем передавать MIMO-передачу, содержащую S потоков символов, в приемник 320 (также этап 10).
Описанные здесь технологии можно использовать для MIMO-передачи по нисходящей линии связи, а также по восходящей линии связи. В одной конструкции MIMO-передачи по нисходящей линии связи узел В может передавать опорный сигнал нисходящей линии связи или общий пилот-сигнал через T антенн в узле В (этап 1). UE может выполнять оценку характеристики канала нисходящей линии связи данных MIMO на основе опорного сигнала нисходящей линии связи или общего пилот-сигнала и может получать матрицу H DL канала MIMO нисходящей линии связи (этап 2). UE может также выполнять оценку шумов и взаимных помех, наблюдаемых UE (этап 3). UE может выбрать матрицу W предварительного кодирования на основе матрицы нисходящей линии связи MIMO и в соответствии с критерием выбора, например, ближайшего расстояния к матрице V DL формирования луча, полученной из матрицы нисходящей линии связи MIMO (этап 4). UE может определять S значений CQI для S потоков символов на основе выбранной матрицы W предварительного кодирования и оценки шумов и взаимных помех и с учетом разности мощности передачи для нисходящей и восходящей линий связи (этап 5). UE может выбрать S значений CQI для узла В (этап 6).
UE также может передавать опорный сигнал зондирования или пилот-сигнал через R антенн в UE (этап 7). Узел В может выполнять оценку характеристики восходящей линии связи MIMO на основе опорного сигнала зондирования или пилот-сигнала и может получать матрицу H UL канала MIMO восходящей линии связи (этап 8). Узел В может получать матрицу H DL канала MIMO нисходящей линии связи из матрицы H UL канала MIMO восходящей линии связи, предполагая взаимную обратимость каналов. Узел В может затем выбрать матрицу W предварительного кодирования на основе матрицы канала MIMO нисходящей линии связи и в соответствии с тем же критерием выбора, который используется для UE (этап 9). Узел В может определять S значений MCS для S потоков символов на основе S значений CQI, принятых из UE. Узел В может затем обрабатывать S потоков символов на основе S значений MCS и может выполнить предварительное кодирование для S потоков символов на основе выбранной матрицы W предварительного кодирования (этап 10). Узел В может затем отправлять MIMO-передачу, содержащую S потоков символов, в UE.
В одной конструкции MIMO-передачи по восходящей линии связи UE может передавать опорный сигнал зондирования или пилот-сигнал через R антенн в UE (этап 1). Узел В может выполнять оценку характеристики канала MIMO восходящей линии связи на основе опорного сигнала зондирования или пилот-сигнала и может получать матрицу H UL канала MIMO восходящей линии связи (этап 2). Узел В может также выполнять оценку шумов и взаимных помех, наблюдаемых узлом В (этап 3). Узел В может выбирать матрицу W предварительного кодирования на основе матрицы канала MIMO восходящей линии связи и в соответствии с критерием выбора, например ближайшим расстоянием к матрице V UL формирования луча, полученной из матрицы канала MIMO восходящей линии связи (этап 4). Узел В может определять S значений MCS для S потоков символов на основе выбранной матрицы W предварительного кодирования и оценки шумов и взаимных помех и с учетом разности мощности передачи для нисходящей и восходящей линий связи (этап 5). Узел В может передавать S значений MCS в UE (этап 6).
Узел В может также передавать опорный сигнал нисходящей линии связи или общий пилот-сигнал через T антенн в узле В (этап 7). UE может выполнять оценку характеристики канала MIMO нисходящей линии связи на основе опорного сигнала нисходящей линии связи или общего пилот-сигнала и может получать матрицу H DL канала MIMO нисходящей линии связи (этап 8). UE может получать матрицу H UL канала MIMO восходящей линии связи из матрицы H DL канала MIMO нисходящей линии связи, предполагая обратимость каналов. UE может затем выбрать матрицу W предварительного кодирования на основе матрицы канала MIMO восходящей линии связи и в соответствии с тем же критерием выбора, используемым для узла В (этап 9). UE может обрабатывать S потоков символов на основе S значений MCS, принятых из узла В, и может выполнять предварительное кодирование для S потоков символов на основе выбранной матрицы W предварительного кодирования (этап 10). UE может затем передать MIMO-передачу, содержащую S потоков символов, в узел В.
Технологии, описанные здесь, могут обеспечивать определенные преимущества. В этих технологиях используется взаимная обратимость каналов для уменьшения обратной связи, сводя ее только к значениям CQI/MCS. Узел В и UE оба могут выбрать матрицу предварительного кодирования на основе их оценок характеристик канала MIMO и используя одинаковые критерии выбора. Следовательно, можно исключить как неопределенность при выборе матрицы предварительного кодирования, так и передачу для обратной связи матрицы предварительного кодирования. Значения CQI/MCS могут быть определены на основе выбранной матрицы предварительного кодирования, а также как оценка шумов и взаимных помех в приемнике. Значения CQI/MCS, таким образом, можно учитывать для любых различий между шумами и взаимными помехами в узле В и в UE. Любые различия между мощностью передачи по нисходящей линии связи и мощностью передачи по восходящей линии связи можно учитывать для определения значений CQI/MCS в приемнике, или их можно корректировать в передатчике. Опорный сигнал нисходящей линии связи из узла В и опорный сигнал зондирования из UE можно использовать для поддержки MIMO-передачи как по нисходящей, так и по восходящей линии связи.
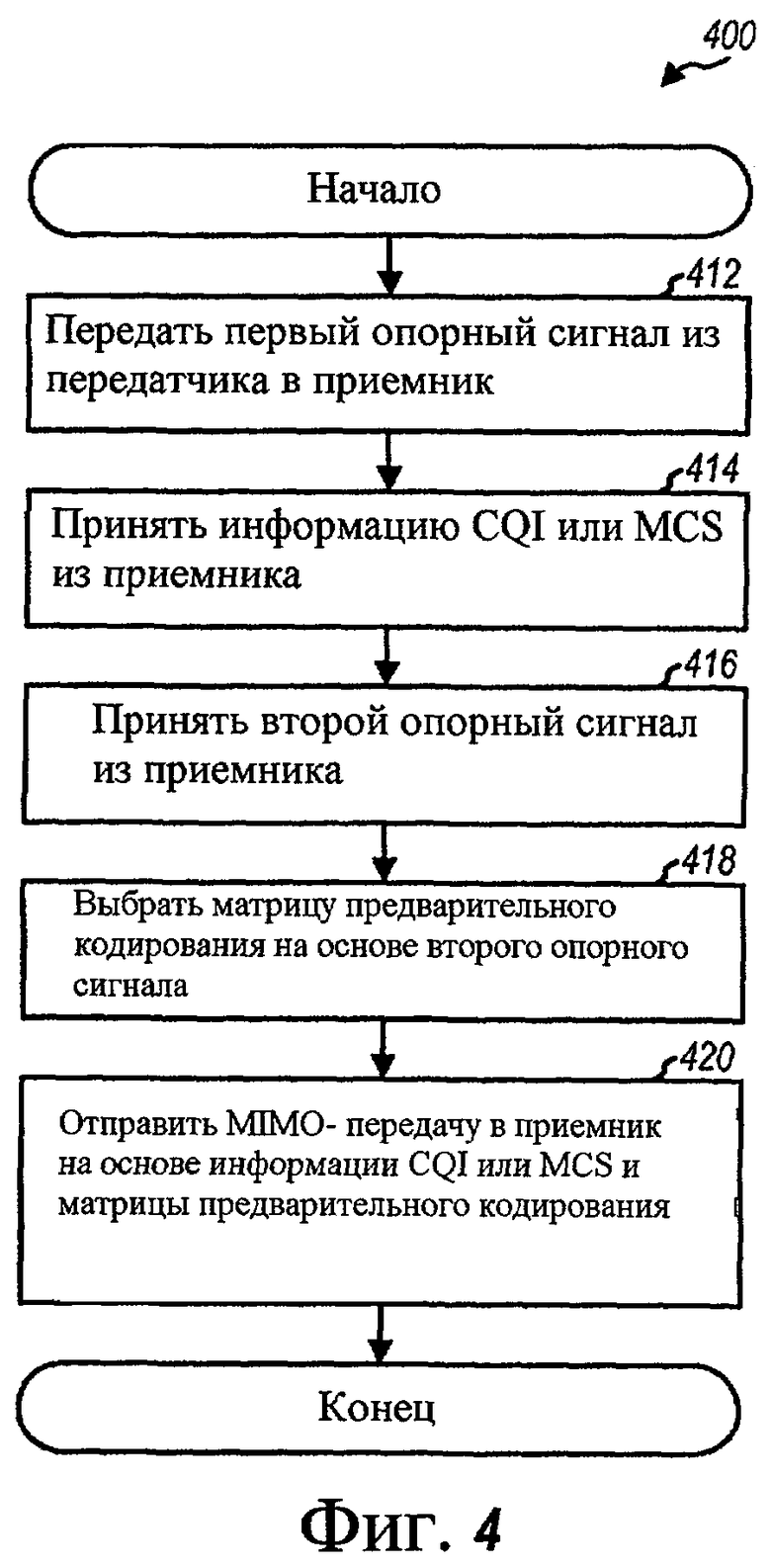
На фиг.4 показана обработка 400 для отправки MIMO-передачи в системе беспроводной связи. Обработка 400 может быть выполнена передатчиком, который может представлять собой узел В для MIMO-передачи по нисходящей линии связи или UE для MIMO-передачи по восходящей линии связи. Передатчик может передавать первый опорный сигнал в приемник (этап 412). Передатчик может принимать CQI или информацию MCS из приемника (этап 414) и также может принимать второй опорный сигнал из приемника (этап 416). Передатчик может выбирать матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора (этап 418). Приемник также может выбирать матрицу предварительного кодирования на основе первого опорного сигнала в соответствии с тем же критерием выбора, который использовался передатчиком. Приемник может определять информацию CQI или MCS на основе матрицы предварительного кодирования и оценок шумов и взаимных помех в приемнике.
В одном варианте этапа 418 передатчик может получать матрицу канала MIMO на основе второго опорного сигнала. Передатчик может получать матрицу формирования луча на основе матрицы канала MIMO, например, используя сингулярное разложение или разложение по собственным значениям. Передатчик может затем выбирать матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча и в соответствии с критерием выбора, который может представлять собой ближайшее расстояние между матрицей формирования луча и матрицей предварительного кодирования. Матрица предварительного кодирования может быть определена передатчиком и, таким образом, не будет передана приемником, что может уменьшить объем служебных данных обратной связи.
Передатчик может отправлять MIMO-передачу в приемник на основе информации CQI или MCS и матрицы предварительного кодирования (этап 420). В одной конструкции передатчик может получать S значений CQI или S значений MCS для S потоков символов из информации CQI или MCS, где S может быть равно единице или больше. Передатчик может регулировать S значений CQI или MCS, например, для учета различий мощности передачи, используемой приемником, для определения информации CQI или MCS и мощности передачи, используемой передатчиком для MIMO-передачи. Передатчик может кодировать и модулировать S потоков символов в соответствии с S значениями CQI или MCS. Передатчик также может выполнять предварительное кодирование для S потоков символов на основе S столбцов матрицы предварительного кодирования. В общем, матрица предварительного кодирования может иметь один или больше столбцов, используемых для предварительного кодирования. Матрица предварительного кодирования может называться вектором предварительного кодирования, если для предварительного кодирования используется только один столбец.
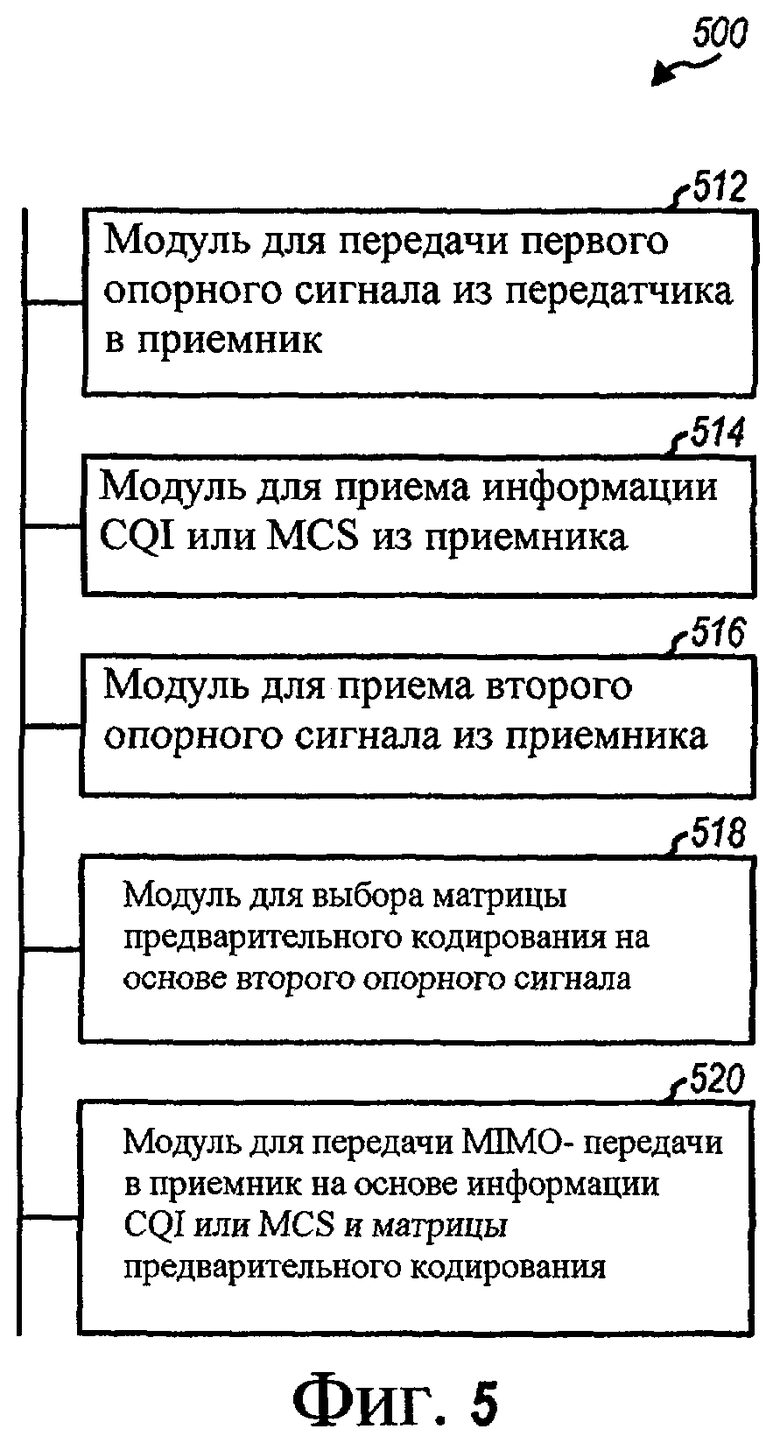
На фиг.5 показана конструкция устройства 500 для отправки передачи данных MIMO в системе беспроводной связи. Устройство 500 включает в себя модуль 512, предназначенный для передачи первого опорного сигнала из передатчика в приемник, модуль 514 для приема информации CQI или MCS из приемника, модуль 516 для приема второго опорного сигнала из приемника, модуль 518 для выбора матрицы предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора, также используемым приемником, для выбора матрицы предварительного кодирования и модуль 520 для передачи MIMO-передачи в приемник на основе информации CQI или MCS и матрицы предварительного кодирования.
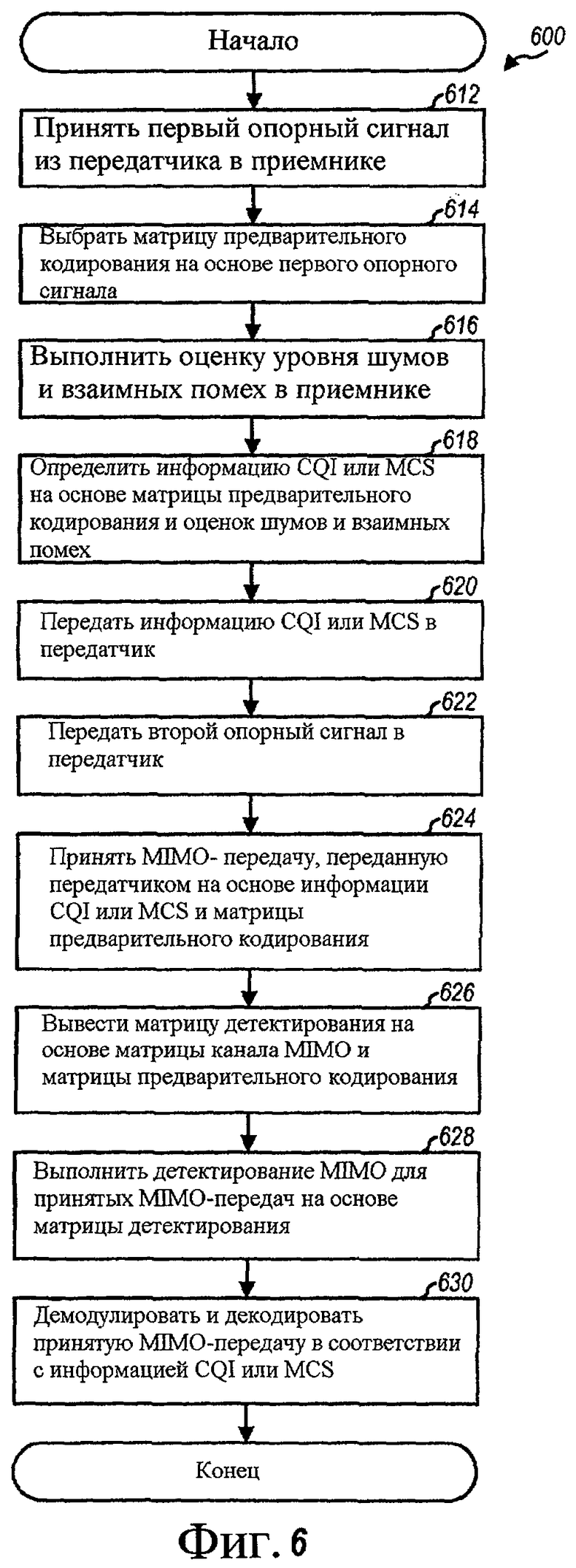
На фиг.6 показана конструкция обработки 600 для приема MIMO-передачи в системе беспроводной связи. Обработка 600 может быть выполнена приемником, который может представлять собой UE для MIMO-передачи по нисходящей линии связи или узел В для MIMO-передачи по восходящей линии связи. Приемник может принимать первый опорный сигнал из передатчика (этап 612). Приемник может выбирать матрицу предварительного кодирования на основе первого опорного сигнала и в соответствии с критерием выбора, также используемым в передатчике для выбора матрицы предварительного кодирования (этап 614). В одном варианте этапа 614 приемник может получать матрицу канала MIMO на основе первого опорного сигнала. Приемник может получать матрицу формирования луча на основе матрицы канала MIMO, например, используя сингулярное разложение или разложение по собственным значениям. Приемник может затем выбирать матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча и в соответствии с критерием выбора, который может представлять собой ближайшее расстояние между матрицей формирования луча и матрицей предварительного кодирования.
Приемник может выполнять оценку шумов и взаимных помех в приемнике (этап 616). Приемник может определять количество потоков символов для передачи и информацию CQI или MCS для потоков символов на основе матрицы предварительного кодирования, оценки шумов и взаимных помех и, возможно, другой информации, такой как разность между мощностью передачи по нисходящей линии связи и мощностью передачи по восходящей линии связи (этап 618). Приемник может передавать информацию CQI или MCS в передатчик (этап 620) и также может передавать второй опорный сигнал в передатчик (этап 622). Приемник может принимать MIMO-передачу, переданную передатчиком, на основе информации CQI или MCS и матрицы предварительного кодирования (этап 624). Матрица предварительного кодирования может быть выбрана передатчиком на основе второго опорного сигнала и в соответствии с тем же критерием выбора, используемым для приемника.
Приемник может получить матрицу детектирования на основе матрицы канала MIMO и матрицы предварительного кодирования (этап 626). Приемник может выполнить детектирование MIMO для принятой MIMO-передачи на основе матрицы детектирования (этап 628). Приемник может дополнительно демодулировать и декодировать S потоков символов в принятой MIMO-передаче в соответствии с S значениями CQI или S значениями MCS из информации CQI или MCS (этап 630).
На фиг.4 и 6 MIMO-передача может быть передана по нисходящей линии связи. В этом случае передатчик может составлять часть узла В, приемник может составлять часть UE, первый опорный сигнал может содержать опорный сигнал нисходящей линии связи, и второй опорный сигнал может содержать опорный сигнал зондирования. MIMO-передача может также быть передана по восходящей линии связи. В этом случае передатчик может составлять часть UE, приемник может составлять часть узла В, первый опорный сигнал может содержать опорный сигнал зондирования, и второй опорный сигнал может содержать опорный сигнал нисходящей линии связи.
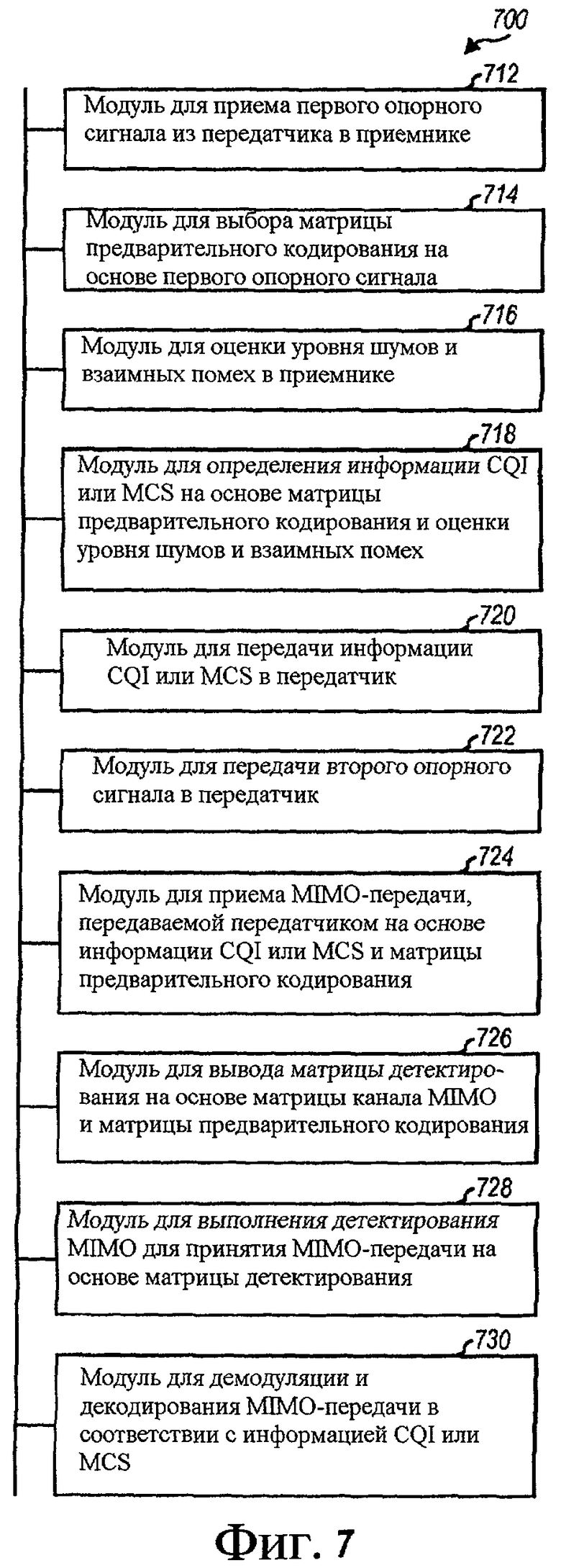
На фиг.7 показана конструкция устройства 700 для приема MIMO-передачи в системе беспроводной связи. Устройство 700 включает в себя модуль 712, предназначенный для приема первого опорного сигнала из передатчика в приемнике, модуль 714 для выбора матрицы предварительного кодирования на основе первого опорного сигнала и в соответствии с критерием выбора, также используемым передатчиком для выбора матрицы предварительного кодирования, модуль 716 для оценки шумов и взаимных помех в приемнике, модуль 718 для определения информации CQI или MCS на основе матрицы предварительного кодирования, оценки шумов и уровня взаимных помех и, возможно, другой информации, модуль 720 для передачи информации CQI или MCS в передатчик, модуль 722 для передачи второго опорного сигнала в передатчик, модуль 724 для приема MIMO-передачи, передаваемой передатчиком на основе информации CQI или MCS и матрицы предварительного кодирования, модуль 726 для получения матрицы детектирования на основе матрицы канала MIMO и матрицы предварительного кодирования, модуль 728 для выполнения детектирования MIMO для принимаемой MIMO-передач на основе матрицы детектирования и модуль 730 для демодуляции и декодирования принятой MIMO-передачи в соответствии с информацией CQI или MCS.
Модули, показанные на фиг.5 и 7, могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д. или любую их комбинацию.
На фиг.8 показана блок-схема конструкции узла В 110 и UE 120, которые могут представлять собой один из узлов B и одно из UE на фиг.1. Узел В 110 оборудован множеством (NT) антенн 834a-834t. UE 120 оборудовано множеством (NR) антенн 852a-852r.
В узле В 110 процессор 820 передачи может принимать данные для одного или больше UE из источника 812 данных, обрабатывать (например, кодировать и модулировать) данные для каждого UE на основе одной или больше схем модуляции и кодирования для этого UE и предоставлять символы данных для всех UE. Процессор 820 передачи может также генерировать символы управления для информации управления или сигналов. Процессор 820 передачи может дополнительно генерировать опорные символы для одного или больше опорных сигналов, например опорного сигнала нисходящей линии связи. Процессор 830 MIMO может выполнять предварительное кодирование по символам данных для каждого UE на основе матрицы предварительного кодирования, выбранной для этого UE, как описано выше. Процессор 830 MIMO также может мультиплексировать предварительно кодированные символы данных, символы управления и опорные символы и может подавать NT выходных потоков символов на NT модуляторов (MOD) 832a-832t. Каждый модулятор 832 может обрабатывать свой выходной поток символов (например, для OFDM) для получения одного входного потока отсчетов. Каждый модулятор 832 может выполнять дополнительную обработку (например, преобразовывать в аналоговую форму, фильтровать, усиливать и преобразовывать с повышением частоты) своего выходного потока отсчетов и генерировать сигнал нисходящей линии связи. NT сигналов нисходящей линии связи из модуляторов 832a-832t могут быть переданы через антенны 834a-834t соответственно.
В UE 120 NR антенн 852a-852r могут принимать NT сигналов нисходящей линии связи из узла В 110, и каждая антенна 852 может предоставлять принимаемый сигнал в соответствующий демодулятор (DEMOD) 854. Каждый демодулятор 854 может выполнять предварительную обработку (например, фильтровать, усиливать, преобразовывать с понижением частоты и преобразовывать в цифровую форму) свой принимаемый сигнал для получения отсчетов и может дополнительно обрабатывать отсчеты (например, для OFDM) для получения принятых символов. Каждый демодулятор 854 может предоставлять принятые символы данных в детектор 860 MIMO и предоставлять принятые опорные символы в процессор 894 канала. Процессор 894 канала может выполнять оценку нисходящего канала MIMO из узла В 110 в UE 120 на основе принятых опорных символов и предоставлять оценку канала MIMO в детектор 860 MIMO. Детектор 860 MIMO может выполнять детектирование MIMO по принятым символам данных на основе оценки канала MIMO и предоставлять оценки символов, которые представляют собой оценки переданных символов. Процессор 870 приема может обрабатывать (например, демодулировать и декодировать) оценки символов на основе одной или больше схем модуляции и кодирования для UE 120, предоставлять декодированные данные потребителю 872 данных и предоставлять декодированную информацию управления в контроллер/процессор 890.
UE 120 может выполнять оценку качества нисходящей линии связи и генерировать информацию обратной связи, которая может содержать информацию CQI или MCS. Информация обратной связи, данные из источника 878 данных и один или больше опорных сигналов (например, опорный сигнал зондирования) могут быть обработаны (например, кодированы и модулированы) процессором 880 передачи, предварительно закодированы процессором 882 MIMO и дополнительно обработаны модуляторами 854a-854r для генерирования NR сигналов восходящей линии связи, которые могут быть переданы через антенны 852a-852r. В узле В 110 NR сигналов восходящей линии связи из UE 120 могут быть приняты NT антеннами 834a-834t и обработаны с помощью демодуляторов 832a-832t. Процессор 844 канала может выполнять оценку канала MIMO восходящей линии связи из UE 120 в узел В 110 и предоставлять оценку канала MIMO в детектор 836 MIMO. Детектор 836 MIMO может выполнять детектирование MIMO на основе оценки канала MIMO и предоставлять оценки символов. Процессор 838 приема может обрабатывать оценки символов, предоставлять декодированные данные потребителю 839 данных и подавать декодированную информацию обратной связи в контроллер/процессор 840. Контроллер/процессор 840 может управлять передачей данных в UE 120 на основе информации обратной связи.
Контроллеры/процессоры 840 и 890 могут направлять работу в узле В 110 и UE 120 соответственно. Запоминающие устройства 842 и 892 могут сохранять данные и программные коды для узла В 110 и UE 120 соответственно. Планировщик 846 может выбирать UE 120 и/или другие UE для передачи данных по нисходящей и/или восходящей линиям связи на основе информации обратной связи, принятой от устройств UE.
Процессоры 820, 830, 840 и/или 844 могут выполнять всю или часть обработки 400 по фиг.4 для отправки MIMO-передач по нисходящей линии связи. Процессоры 860, 870, 890 и/или 894 могут выполнять всю или часть обработки 600 на фиг.6 для приема MIMO-передач по нисходящей линии связи. Процессоры 880, 882, 890 и/или 894 могут выполнять всю или часть обработки 400 по фиг.4 для отправки MIMO-передач по восходящей линии связи. Процессоры 836, 838, 840 и/или 844 могут выполнять всю или часть обработки 600 по фиг.6 для приема MIMO-передач по восходящей линии связи.
Для специалистов в данной области техники будет понятно, что информация и сигналы могут быть представлены с использованием любых из различных и отличающихся технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, на которые могла быть сделана ссылка в приведенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Для специалистов в данной области техники также будет понятно, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с представленным здесь раскрытием, могут быть воплощены как электронные аппаратные средства, компьютерное программное обеспечение или комбинация обоих подходов. Для ясной иллюстрации такой взаимозаменяемости аппаратных средств и программных средств различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше, в общем, с учетом их функциональности. Будет ли такая функциональность воплощена как аппаратное средство или программное средство, зависит от конкретного варианта применения и конструктивных ограничений, наложенных на систему в целом. Специалисты в данной области техники могут воплотить описанные функции различными способами для каждого конкретного варианта применения, но такие решения по воплощению не должны быть интерпретированы как отход от объема настоящего раскрытия.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытием, приведенным здесь, могут быть воплощены или выполнены с использованием процессора общего назначения, цифрового сигнального процессора (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретных логических вентилей или транзисторных логических схем, дискретных аппаратных компонентов или любой их комбинации, разработанных для выполнения функций, описанных здесь. Процессор общего назначения может представлять собой микропроцессор, но, в качестве альтернативы, процессор может представлять собой любой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть воплощен как комбинация вычислительных устройств, например комбинация DSP и микропроцессора, множества микропроцессоров, одного или больше микропроцессоров совместно с ядром DSP или любая другая такая конфигурация.
Этапы способа или алгоритма, описанные со ссылкой на приведенное здесь раскрытие, могут быть воплощены непосредственно в виде аппаратных средств, в виде программного модуля, исполняемого процессором, или как комбинация этих двух подходов. Программный модуль может располагаться в запоминающем устройстве ОЗУ, запоминающем устройстве типа флеш, запоминающем устройстве ПЗУ, запоминающем устройстве EPROM, в запоминающем устройстве EEPROM, в регистрах, на жестком диске, на съемном диске, на CD-ROM или в любой другой форме носителя информации, известной в данной области техники. Примерный носитель информации соединяют с процессором таким образом, что процессор может считывать информацию с носителя информации и записать информацию на него. В альтернативном подходе носитель информации может быть выполнен интегрально с процессором. Процессор и носитель информации могут находиться в ASIC. ASIC может быть установлена в терминале пользователя. В качестве альтернативы, процессор и носитель информации могут находиться как дискретные компоненты в терминале пользователя.
В одном или больше примерных вариантах конструкций описанные функции могут быть воплощены в виде аппаратных средств, программных средств, встроенного программного обеспечения или с использованием любой их комбинации. Если они будут воплощены в виде программных средств, эти функции могут быть сохранены на или могут быть переданы как одна или больше инструкций или кодов на считываемом компьютером носителе информации. Считываемые компьютером носители информации включают в себя как компьютерные носители информации, так и среды передачи данных, включая любые среды, которые обеспечивают передачу компьютерной программы из одного места в другое. Носители информации могут представлять собой любые доступные носители, к которым может обращаться компьютер общего назначения или специальный компьютер. В качестве примера, а не для ограничения, такие считываемые компьютером носители информации могут содержать ОЗУ, ПЗУ, EEPROM, CD-ROM или другой носитель на оптическом диске, накопитель на магнитном диске или любые другие устройства магнитных накопителей или любой другой носитель, который можно использовать для переноса или сохранения требуемого средства программного кода в форме инструкций или структур данных и к которому может обращаться компьютер общего назначения или компьютер специального назначения либо процессор общего назначения или процессор специального назначения. Кроме того, любое соединение соответствующим образом называется считываемым компьютером носителем информации. Например, если программное обеспечение передается с Web-сайта, сервера или другого удаленного источника, используя коаксиальный кабель, оптоволоконный кабель, витую пару, линию цифрового абонента (DSL) или канал передачи с применением беспроводных технологий, такой как инфракрасная передача, радиопередача и микроволновая передача, тогда коаксиальный кабель, оптоволоконный кабель, витая пара, DSL (абонентская цифровая линия) или беспроводные технологии, такие как инфракрасная передача, радиопередача или микроволновая передача, включены в определение носителя. Термин "диск", используемый здесь, включает в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и диск типа blu-ray, где диски обычно воспроизводят данные с использованием магнитных свойств, а также диски воспроизводят данные оптическим образом с использованием лазеров. Комбинации описанных выше технологий также должны быть включены в пределы объема считываемых компьютером носителей информации.
Предыдущее описание изобретения предоставлено для обеспечения возможности для любого человека, являющегося специалистом в данной области техники, выполнить или использовать это изобретение. Различные модификации изобретения будут понятны для специалиста в данной области техники, и обобщенные принципы, определенные здесь, могут применяться для других вариантов, без выхода за пределы сущности или объема раскрытия. Таким образом, раскрытие не предназначено для ограничений примерами и конструкциями, описанными здесь, но должно соответствовать самому широкому объему, соответствующему раскрытым здесь принципам и новым свойствам.
Настоящее изобретение относится к технологиям MIMO-передачи и приема данных в системе беспроводной связи. Технический результат изобретения заключается в уменьшении объема служебной информации. В одной конструкции передатчик передает первый опорный сигнал в приемник. Приемник выбирает матрицу предварительного кодирования на основе первого опорного сигнала и в соответствии с критериями выбора. Приемник оценивает шумы и взаимные помехи в приемнике и определяет индикатор качества канала (CQI) или информацию схемы модуляции и кодирования (MCS) на основе матрицы предварительного кодирования и оценки шумов и уровня взаимных помех. Приемник передает информацию CQI или MCS и второй опорный сигнал в передатчик. Передатчик выбирает матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с тем же критерием выбора, используемым приемником. Передатчик затем отправляет MIMO-передачу в приемник на основе информации CQI или MCS, получаемой из приемника и матрицы предварительного кодирования, выбранной передатчиком. 6 н. и 22 з.п. ф-лы, 8 ил.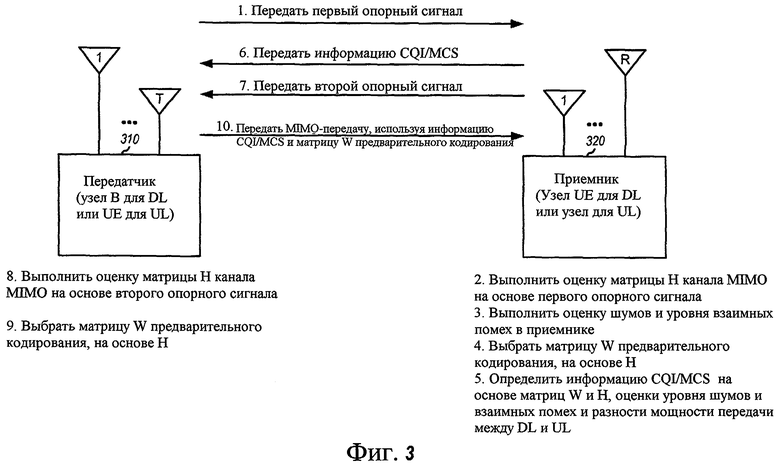
1. Способ передачи данных в системе беспроводной связи, содержащий этапы, на которых
передают первый опорный сигнал из передатчика в приемник;
принимают информацию индикатора качества канала (CQI) или схемы модуляции и кодирования (MCS) из приемника;
принимают второй опорный сигнал из приемника;
выбирают матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования; и
отправляют передачу с множеством входов и множеством выходов (MIMO) в приемник на основе информации CQI или MCS и матрицы предварительного кодирования.
2. Способ по п.1, в котором матрицу предварительного кодирования выбирают с помощью приемника на основе первого опорного сигнала, при этом информацию CQI или MCS определяют с помощью приемника на основе матрицы предварительного кодирования и оценки шумов и взаимных помех в приемнике.
3. Способ по п.1, в котором при выборе матрицы предварительного кодирования
получают матрицу канала MIMO на основе второго опорного сигнала,
получают матрицу формирования луча на основе матрицы канала MIMO и выбирают матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча.
4. Способ по п.3, в котором при получении матрицы формирования луча выполняют сингулярное разложение или разложение по собственным значениям матрицы канала MIMO для получения матрицы формирования луча.
5. Способ по п.3, в котором при выборе матрицы предварительного кодирования из кодовой книги выбирают матрицу предварительного кодирования из кодовой книги на основе матрицы формирования луча и согласно критерию выбора, соответствующему ближайшему расстоянию между матрицей формирования луча и матрицей предварительного кодирования.
6. Способ по п.1, в котором при отправке MIMO-передач
получают S значений CQI или S значений MCS для S потоков символов из информации CQI или MCS, где S больше или равно единице, и
кодируют и модулируют S потоков символов в соответствии с S значениями CQI или S значениями MCS.
7. Способ по п.1, в котором при отправке MIMO-передач выполняют предварительное кодирование для S потоков символов на основе матрицы предварительного кодирования, где S больше или равно единице.
8. Способ по п.1, в котором MIMO-передачу отправляют по нисходящей линии связи, при этом передатчик составляет часть узла В, а приемник составляет часть пользовательского устройства (UE), причем первый опорный сигнал содержит опорный сигнал нисходящей линии связи, а второй опорный сигнал содержит опорный сигнал зондирования.
9. Способ по п.1, в котором MIMO-передачу отправляют по восходящей линии связи, при этом передатчик составляет часть пользовательского устройства (UE), а приемник составляет часть узла В, причем первый опорный сигнал содержит опорный сигнал зондирования, а второй опорный сигнал содержит опорный сигнал нисходящей линии связи.
10. Устройство для беспроводной связи, содержащее:
по меньшей мере один процессор, выполненный с возможностью: передавать первый опорный сигнал из передатчика в приемник,
принимать информацию индикатора качества канала (CQI) или схемы модуляции и кодирования (MCS) из приемника,
принимать второй опорный сигнал из приемника,
выбирать матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования, и
отправлять передачу с множеством входов и множеством выходов (MIMO) в приемник на основе информации CQI или MCS и матрицы предварительного кодирования.
11. Устройство по п.10, в котором упомянутый по меньшей мере один процессор выполнен с возможностью получать матрицу канала MIMO на основе второго опорного сигнала, получать матрицу формирования луча на основе матрицы канала MIMO и выбирать матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча.
12. Устройство по п.10, в котором упомянутый по меньшей мере один процессор выполнен с возможностью получать S значений CQI или S значений MCS для S потоков символов из информации CQI или MCS, где S больше или равно единице, кодировать и модулировать S потоков символов в соответствии с S значениями CQI или S значениями MCS и выполнять предварительное кодирование для S потоков символов на основе матрицы предварительного кодирования.
13. Устройство для беспроводной связи, содержащее:
средство для передачи первого опорного сигнала из передатчика в приемник;
средство для приема информации индикатора качества канала (CQI) или схемы модуляции и кодирования (MCS) из приемника;
средство для приема второго опорного сигнала из приемника;
средство для выбора матрицы предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования; и
средство для передачи передаваемых данных с множеством входов и множеством выходов (MIMO) в приемник на основе информации CQI или MCS и матрицы предварительного кодирования.
14. Устройство по п.13, в котором средство для выбора матрицы предварительного кодирования содержит
средство для получения матрицы канала MIMO на основе второго опорного сигнала,
средство для получения матрицы формирования луча на основе матрицы канала MIMO и
средство для выбора матрицы предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча.
15. Устройство по п.13, в котором средство для передачи MIMO-передач содержит
средство для получения S значений CQI или S значений MCS для S потоков символов из информации CQI или MCS, где S больше или равно единице,
средство для кодирования и модуляции S потоков символов в соответствии с S значениями CQI или S значениями MCS и
средство для выполнения предварительного кодирования для S потоков символов на основе матрицы предварительного кодирования.
16. Считываемый компьютером носитель информации, содержащий код для предписания по меньшей мере одному компьютеру:
передать первый опорный сигнал из передатчика в приемник,
принять информацию индикатора канала качества (CQI) или схемы модуляции и кодирования (MCS) из приемника,
принять второй опорный сигнал из приемника,
выбрать матрицу предварительного кодирования на основе второго опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования, и
отправить передачу с множеством входов и множеством выходов (MIMO) в приемник на основе информации CQI или MCS и матрицы предварительного кодирования.
17. Способ приема данных в системе беспроводной связи, содержащий этапы, на которых
принимают первый опорный сигнал из передатчика в приемнике;
выбирают матрицу предварительного кодирования на основе первого опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования;
определяют информацию индикатора качества канала (CQI) или схемы модуляции и кодирования (MCS) на основе матрицы предварительного кодирования;
передают информацию CQI или MCS в передатчик;
передают второй опорный сигнал в передатчик; и
принимают передачу с множеством входов и множеством выходов (MIMO), переданную передатчиком на основе информации CQI или MCS и матрицы предварительного кодирования, причем матрицу предварительного кодирования выбирают с помощью передатчика на основе второго опорного сигнала.
18. Способ по п.17, в котором при выборе матрицы предварительного кодирования
получают матрицу канала MIMO на основе первого опорного сигнала,
получают матрицу формирования луча на основе матрицы канала MIMO и выбирают матрицу предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча.
19. Способ по п.18, в котором при выборе матрицы предварительного кодирования из кодовой книги
выбирают матрицу предварительного кодирования из кодовой книги на основе матрицы формирования луча и согласно критерию выбора, соответствующему ближайшему расстоянию между матрицей формирования луча и матрицей предварительного кодирования.
20. Способ по п.17, в котором при определении информации CQI или MCS выполняют оценку шумов и взаимных помех в приемнике и
определяют количество потоков символов для передачи и информации CQI или MCS для потоков символов на основе матрицы предварительного кодирования и оценки шумов и взаимных помех.
21. Способ по п.20, в котором при определении информации CQI или MCS дополнительно
определяют количество потоков символов для передачи и информацию CQI или MCS для потоков символов дополнительно на основе разности между мощностью передачи для нисходящей линии связи и мощностью передачи для восходящей линии связи.
22. Способ по п.17, дополнительно содержащий этапы, на которых
получают матрицу канала MIMO на основе первого опорного сигнала;
получают матрицу детектирования на основе матрицы канала MIMO и матрицы предварительного кодирования; и
выполняют детектирование MIMO для принятой MIMO-передачи на основе матрицы детектирования.
23. Способ по п.17, дополнительно содержащий этапы, на которых
демодулируют и декодируют S потоков символов, переданных в принятой MIMO-передаче, в соответствии с S значениями CQI или S значениями MCS из информации CQI или MCS, где S больше или равно единице.
24. Способ по п.17, в котором MIMO-передачу принимают по нисходящей линии связи, причем передатчик составляет часть узла В, а приемник составляет часть оборудования пользователя (UE), при этом первый опорный сигнал содержит опорный сигнал нисходящей линии связи, а второй опорный сигнал содержит опорный сигнал зондирования.
25. Способ по п.17, в котором MIMO-передачу принимают по восходящей линии связи, при этом передатчик представляет собой часть пользовательского устройства (UE), а приемник составляет часть узла В, причем первый опорный сигнал содержит опорный сигнал зондирования, а второй опорный сигнал содержит опорный сигнал нисходящей линии связи.
26. Устройство для беспроводной связи, содержащее:
средство для приема первого опорного сигнала из передатчика в приемнике;
средство для выбора матрицы предварительного кодирования на основе первого опорного сигнала и в соответствии с критерием выбора, также используемым приемником для выбора матрицы предварительного кодирования;
средство для определения информации индикатора качества канала (CQI) или схемы модуляции и кодирования (MCS) на основе матрицы предварительного кодирования;
средство для передачи информации CQI или MCS в передатчик;
средство для передачи второго опорного сигнала в передатчик; и
средство для приема передачи с множеством входов и множеством выходов (MIMO), переданной передатчиком на основе информации CQI или MCS и матрицы предварительного кодирования, причем матрица предварительного кодирования выбирается передатчиком на основе второго опорного сигнала.
27. Устройство по п.26, в котором средство для выбора матрицы предварительного кодирования содержит
средство для получения матрицы канала MIMO на основе первого опорного сигнала,
средство для получения матрицы формирования луча на основе матрицы канала MIMO и
средство для выбора матрицы предварительного кодирования из кодовой книги матриц предварительного кодирования на основе матрицы формирования луча.
28. Устройство по п.26, в котором средство для определения информации CQI или MCS содержит
средство для оценки шумов и взаимных помех в приемнике и
средство для определения количества потоков символов для передачи и информации CQI или MCS для потоков символов на основе матрицы предварительного кодирования и оценки шумов и взаимных помех.
| US 2005128953 A1, 16.06.2005 | |||
| WO 03001761 A1, 03.01.2003 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ РЕСУРСОВ В КОММУНИКАЦИОННОЙ СИСТЕМЕ С МНОЖЕСТВЕННЫМИ ВХОДАМИ И МНОЖЕСТВЕННЫМИ ВЫХОДАМИ | 2002 |
|
RU2294599C2 |
| WO 2006007148 A1, 19.01.2006 | |||
| US 2007174038 A1, 26.07.2007. | |||

