Изобретение относится к области навигации воздушных судов (ВС) и может быть использовано для надежной навигации их на протяжении всего движения и, что особенно актуально, - на завершающей стадии движения при посадке ВС в аэропорту, а также других движущихся объектов (например, морских судов в плавании и при причаливании их в морском порту и т.п.) при любой климатической и спутниковой погоде.
Известен способ, описанный в полезной модели «Устройство для формирования поправок в системе радионавигации» (патент №39701, МПК 7 G01C 21/24 за 2004 г., бюл. №22 от 10.08.2004 г.), включающий прием радиосигналов навигационных спутников (НС) через последовательно соединенные антенный модуль, распределитель радиосигналов и группу приемников, при этом на каждом приемнике осуществляют усиление радиосигналов НС, селекцию полезной их составляющей из смеси с помехами и шумами и преобразование очищенного радиосигнала с высокой частоты на промежуточную с помощью радиочастотного модуля, после чего осуществляют аналого-цифровое преобразование с помощью аналого-цифрового преобразователя (АЦП), а затем осуществляют анализ на вычислителе выходных данных группы приемников совместно с данными метеодатчиков температуры, давления и влажности воздуха и выработку сигналов качества навигационной информации и поправок к ней для ее потребителей.
Известно также устройство, осуществляющее упомянутый выше способ, описанное в той же, указанной выше, полезной модели, содержащее последовательно соединенные антенный модуль, распределитель радиосигналов, группу спутниковых приемников с радиочастотным трактом и цифровой обработкой, вычислитель и группу выходов вычислителя для выдачи информации потребителям.
Недостатками известных способа и устройства, предназначенных для решения относительно узкой задачи - выработки навигационных поправок для ВС на основе простейшей не корреляционной обработки сигналов от относительно небольшого числа НС (в отсутствии на тот момент сигналов от НС спутниковых систем GALILEO и частично ГЛОНАСС), является относительная ненадежность вырабатываемых поправок для ВС при движении их на трассе и невозможность обеспечения безопасной навигации ВС, особенно в зоне аэропорта при посадке ВС в условиях отсутствия приема спутниковых сигналов и в условиях отсутствия видимости.
Известен наиболее близкий по технической сущности к заявляемому изобретению способ по изобретению «Способ определения недопустимой аномалии принимаемых сигналов навигационных спутников…» (Патент №2393504 от 23.10.2008 г., МПК 7 G01C 19/07, Бюл. №18 от 27.06.2010 г.), включающий прием радиосигналов НС последовательно через антенный модуль, распределитель радиосигналов и группу приемников, при этом на каждом приемнике осуществляют усиление радиосигналов НС, селекцию полезной их составляющей из смеси с помехами и шумами и преобразование очищенного радиосигнала с высокой частоты на промежуточную с помощью радиочастотного модуля, после чего осуществляют аналого-цифровое преобразование с помощью АЦП, а затем осуществляют анализ на вычислителе выходных данных группы приемников совместно с данными метеодатчиков температуры, давления и влажности воздуха и выработку сигналов качества навигационной информации и поправок к ней для ее потребителей, причем прием и анализ радиосигналов НС осуществляют с помощью высокоточной наземной стационарной контрольной станции (СКС) с заранее точно определенными параметрами ее дислокации, содержащей в своем составе в качестве группы приемников такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая, обладая резервированием приемников, воспринимает радиосигналы НС от навигационных спутниковых систем ГЛОНАСС, GALILEO и GPS и осуществляет их цифровую статистическую обработку с помощью программируемых корреляторов, при этом перед началом работы СКС осуществляют инженерные вводы в память ее вычислителя о точной географической дислокации СКС и режимов ее работы, а в регистр управления модуля управления каждого приемника - режимов его работы и его коррелятора, а затем в процессе работы СКС осуществляют одновременный прием радиосигналов всех НС, находящихся в зоне радиовидимости, причем корреляционную обработку сигналов НС по каждой из навигационных спутниковых систем осуществляют на группе своих m-канальных приемников по каждому из НС раздельно в своем соответствующем канале на своем корреляторе, имеющем заранее перед началом работы запрограммированные данные структуры дальномерного кода и временной задержки его начального фронта, временного размера строба корреляционного накопления, частоты и начальной фазы гармонического сигнала и частоты тактов синхрогенератора, в результате корреляционной обработки в реальном масштабе времени в выходном накопителе каждого коррелятора фиксируют с привязкой к системе единого времени с заданной вероятностью правильного обнаружения для каждого НС в зоне его радиовидимости каждой спутниковой навигационной системы величину задержки прохождения дальномерного кода от каждого НС до СКС, затем на вычислителе сопоставляют выходные данные, полученные от БСП, таким образом, что для одного и того же текущего фиксированного момента времени получают расчетные данные географических координат СКС, полученные на основе принятых от различных спутниковых навигационных систем, при их совпадении между собой и с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих навигационных спутниковых систем.
Известно также наиболее близкое по технической сущности к заявляемому устройству «Устройство определения недопустимой аномалии принимаемых сигналов НС», описанное в указанном выше изобретении по патенту №2393504, содержащее последовательно соединенные антенный модуль, распределитель радиосигналов, группу спутниковых приемников, вычислитель и группу выходов вычислителя для выдачи информации потребителям, а также модуль метеодатчиков, группа выходов которого соединена с соответствующей группой входов вычислителя, что представляет собой высокоточную наземную стационарную контрольную станцию (СКС), антенный модуль которой содержит несколько широкополосных антенн со своими малошумящими высокочастотными усилителями, обеспечивающих равномерный прием радиосигнала заданного диапазона со всего небосвода, а группа спутниковых приемников представляет такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая содержит в себе приемники, воспринимающие одновременно радиосигналы от навигационных спутниковых систем ГЛОНАСС, GPS и GALILEO, при этом БСП для каждой из этих систем содержит группу приемников с резервированием их, а каждый приемник является m-канальным с закреплением каждого канала за одним из НС, причем каждый отдельный канал содержит радиочастотный модуль, АЦП модуль управления приемником в составе генераторов гармонических сигналов, дальномерного кода синхротактов, строба накопления и сигналов задержки, программируемый коррелятор в составе восьми умножителей, трехразрядного сдвигового регистра и шести независимых накопителей, группу информационных выходов и группу входов инженерных вводов, вход и выход радиочастотного модуля соединены с соответствующими выходом распределителя радиосигналов и с первым входом AЦП, выход которого соединен с первыми входами первого и второго умножителей, вторые входы которых соединены соответственно с выходами sin и cos генератора гармонических сигналов, выход первого умножителя соединен с первыми входами третьего, четвертого и пятого умножителей, а выход второго умножителя соединен с первыми входами шестого, седьмого и восьмого умножителей, вторые входы третьего и шестого умножителя соединены с выходом первого разряда сдвигового регистра (CP), выход второго разряда которого соединен со вторыми входами четвертого и седьмого умножителя, а выход третьего разряда CP соединен со вторыми входами пятого и восьмого умножителя, выходы третьего, четвертого, пятого, шестого, седьмого и восьмого умножителей соединены с соответствующими информационными входами накопителей, первый и второй управляющие входы которых соединены соответственно с выходами синхрогенератора и генератора строба накопления, выход генератора дальномерного кода соединен с информационным входом CP, вход сдвигов которого соединен со входом тактов АЦП и с выходом синхрогенератора, выход генератора сигнала задержки соединен со входом управления синхрогенератора, группа входов инженерных вводов, являющаяся группой входов управления данного канала приемника, является группой входов устройства, группы информационных выходов накопителей каждого канала каждого приемника через единую локальную вычислительную сеть соединены с группой информационных входов вычислителя, осуществляющего в квазиреальном масштабе времени вторичную обработку данных накопителей таким образом, что для одного и того же момента времени получают расчетные данные географических координат СКС, полученные в результате анализа данных нескольких НС, а также нескольких спутниковых навигационных систем, при этом при совпадении расчетных географических координат с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих спутниковых навигационных систем.
Недостатками способа и устройства известного изобретения является невозможность обеспечить надежную спутниковую навигацию ВС при отсутствии приема спутниковых навигационных сигналов сразу от всех глобальных спутниковых навигационных систем GPS, ГЛОНАСС и ГАЛИЛЕО, например, в условиях преднамеренных или случайных радиопомех, забивающих спутниковые сигналы, или в условиях катастрофических отказов спутников (возможны также их управляемые отключения, смена частот и режимов работы соответствующими военными ведомствами и даже уничтожение в целях военного противодействия) или отказов наземных, орбитальных, или бортовых систем глобальных навигационных спутниковых систем. Кроме того, даже абсолютно исправные и кондиционные глобальные навигационные спутниковые системы при их суперточности совершенно беспомощны при необходимости экстренно обнаруживать и визуализировать случайные препятствия на пути движения ВС, например, на посадочной полосе при посадке ВС в условиях плохой видимости (случайные машины, люди и т.п.), а также - неподвижные местные предметы географического и цивилизационного характера при критической потере высоты ВС.
Техническим результатом и целью заявляемого изобретения является устранение недостатков прототипа, т.е. обеспечение безопасной навигации ВС на всем пути его движения в условиях отсутствия приема спутниковых навигационных радиосигналов и обеспечение обнаружения и визуализации препятствий на пути ВС при плохой видимости при его посадке путем применения дополнительных средств навигации с другой физической природой, не подверженной вредному воздействию радиопомех - оптико-электронной системы (ОЭС) навигации, а также применения наземных псевдоспутников, образующих совместно с системами GPS, ГЛОНАСС и ГАЛИЛЕО комплексированное универсальное всепогодное средство навигации ВС.
Указанные технический результат и цель достигаются тем, что комплектованный универсальный всепогодный способ определения местоположения и посадки ВС, включающий прием радиосигналов навигационных спутников (НС) последовательно через антенный модуль, распределитель радиосигналов и группу приемников, при этом на каждом приемнике осуществляют усиление радиосигналов НС, селекцию полезной их составляющей из смеси с помехами и шумами и преобразование очищенного радиосигнала с высокой частоты на промежуточную с помощью радиочастотного модуля, после чего осуществляют аналого-цифровое преобразование с помощью АЦП, а затем осуществляют анализ на вычислителе выходных данных группы приемников совместно с данными метеодатчиков температуры, давления и влажности воздуха и выработку сигналов качества навигационной информации и поправок к ней для ее потребителей, причем прием и анализ радиосигналов НС осуществляют с помощью высокоточной наземной стационарной контрольной станции (СКС) с заранее точно определенными параметрами ее дислокации, содержащей в своем составе в качестве группы приемников такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая, обладая резервированием приемников, воспринимает радиосигналы НС от навигационных спутниковых систем ГЛОНАСС, GPS и GALILEO и осуществляет их цифровую статистическую обработку с помощью программируемых корреляторов, при этом перед началом работы СКС осуществляют инженерные вводы в память ее вычислителя о точной географической дислокации СКС и режимов ее работы, а в регистр управления модуля управления каждого приемника - режимов его работы и его коррелятора, а затем в процессе работы СКС осуществляют одновременный прием радиосигналов всех НС, находящихся в зоне радиовидимости, причем корреляционную обработку сигналов НС по каждой из навигационных спутниковых систем осуществляют на группе своих m-канальных приемников по каждому из НС раздельно в своем соответствующем канале на своем корреляторе, имеющем заранее перед началом работы запрограммированные данные структуры дальномерного кода и временной задержки его начального фронта, временного размера строба корреляционного накопления, частоты и начальной фазы гармонического сигнала и частоты тактов синхрогенератора, в результате корреляционной обработки в реальном масштабе времени в выходном накопителе каждого коррелятора фиксируют с привязкой к системе единого времени с заданной вероятностью правильного обнаружения для каждого НС в зоне его радиовидимости каждой спутниковой навигационной системы величину задержки прохождения дальномерного кода от каждого НС до СКС, затем на вычислителе сопоставляют выходные данные, полученные от БСП, таким образом, что для одного и того же текущего фиксированного момента времени получают расчетные данные географических координат СКС, полученные на основе принятых от различных спутниковых навигационных систем, при их совпадении между собой и с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационной систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих систем, a также тем, что при выявлении средствами СКС недопустимой аномалии радиосигналов НС СКС рекомендует воздушному судну (ВС) перейти для успешной навигации от использования радиосигналов НС к использованию радиосигналов псевдоспутников (ПС), представляющих собой наземную стационарную систему ПС, сконцентрированных в районе аэропортов и под коридорами движения ВС и имеющих отличающиеся индивидуальные параметры радиосигналов, которые воспринимаются бортовым оборудованием ВС, антенна которого расположена снизу ВС с ориентацией на землю, и далее обрабатываются аналогично радиосигналам НС, с помощью бортового ретранслятора радиосигналы ПС возвращают на землю, где их принимают с помощью соответствующих приемников СКС для контроля правильности работы ПС, затем от СКС через систему передачи данных направляют на борт данного ВС информацию о качестве работы системы ПС, в условиях плохой видимости при подлете ВС к аэропорту примерно за 10 км до начала посадочной полосы СКС рекомендует данному ВС перейти на оптико-электронную систему (ОЭС), представляющую собой совокупность наземных и бортовых ультрафиолетовых (УФ) излучателей и приемников со средствами обработки и визуализации местоположения ВС относительно посадочной полосы для пилота на борту и диспетчера на земле, с помощью УФ-приемника ВС наблюдают за УФ-излучателями на аэродроме и определяют угловые направления ВС и расстояния от ВС до УФ-излучателей, аналогично с помощью УФ-приемников аэродрома наблюдают за УФ-излучателями на ВС для своевременного обнаружения ВС и определения его положения в пространстве диспетчером на земле, осуществляют обмен данными, полученными ОЭС синхронно на земле и на борту и формируют интегрированную информацию с точностью порядка 1,0 м по дальности ВС до посадочной полосы.
Указанный технический результат и цель достигаются тем, что устройство комплексированного универсального всепогодного определения местоположения и посадки воздушного судна, содержащее последовательно соединенные антенный модуль, распределитель радиосигналов, группу спутниковых приемников, вычислитель и группу выходов вычислителя для выдачи информации потребителям, а также модуль метеодатчиков, группа выходов которого соединена с соответствующей группой входов вычислителя, что представляет собой высокоточную наземную стационарную контрольную станцию (СКС), антенный модуль которой содержит несколько широкополосных антенн со своими малошумящими высокочастотными усилителями, обеспечивающих равномерный прием радиосигнала заданного диапазона со всего небосвода, а группа спутниковых приемников представляет такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая содержит в себе приемники, воспринимающие одновременно радиосигналы от навигационных спутниковых систем ГЛОНАСС, GPS и GALILEO, при этом БСП для каждой из этих систем содержит группу приемников с резервированием их, а каждый приемник является m-канальным с закреплением каждого канала за одним из НС, причем каждый отдельный канал содержит радиочастотный модуль, АЦП, модуль управления приемником в составе генераторов гармонических сигналов, дальномерного кода, синхротактов, строба накопления и сигналов задержки, программируемый коррелятор в составе восьми умножителей, трехразрядного сдвигового регистра и шести независимых накопителей, группу информационных выходов и группу входов инженерных вводов, вход и выход радиочастотного модуля соединены с соответствующими выходом распределителя радиосигналов и с первым входом АЦП, выход которого соединен с первыми входами первого и второго умножителей, вторые входы которых соединены соответственно с выходами sin и cos генератора гармонических сигналов, выход первого умножителя соединен с первыми входами третьего, четвертого и пятого умножителей, а выход второго умножителя соединен с первыми входами шестого, седьмого и восьмого умножителей, вторые входы третьего и шестого умножителя соединены с выходом первого разряда сдвигового регистра (CP), выход второго разряда которого соединен со вторыми входами четвертого и седьмого умножителя, а выход третьего разряда CP соединен со вторыми входами пятого и восьмого умножителя, выходы третьего, четвертого, пятого, шестого, седьмого и восьмого умножителей соединены с соответствующими информационными входами накопителей, первый и второй управляющие входы которых соединены соответственно с выходами синхрогенератора и генератора строба накопления, выход генератора дальномерного кода соединен с информационным входом CP, вход сдвигов которого соединен со входом тактов АЦП и с выходом синхрогенератора, выход генератора сигнала задержки соединен со входом управления синхрогенератора, группа входов инженерных вводов, являющаяся группой входов управления данного канала приемника, является группой входов устройства, группы информационных выходов накопителей каждого канала каждого приемника через единую локальную вычислительную сеть соединены с группой информационных входов вычислителя, осуществляющего в квазиреальном масштабе времени вторичную обработку данных накопителей таким образом, что для одного и того же момента времени получают расчетные данные географических координат СКС, полученные в результате анализа данных нескольких НС, а также нескольких спутниковых навигационных систем, при этом при совпадении расчетных географических координат с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих систем, тем, что устройство дополнительно содержит в составе своей наземной части систему псевдоспутников (ПС) со своими передатчиками и антенно-фидерными устройствами (АФУ), наземное оборудование оптико-электронной системы (ОЭС) со своими ультрафиолетовыми (УФ) излучателями и приемниками и средствами обработки и визуализации сигналов, дополнительные приемники радиосигналов ПС в составе БСП СКС для приема сигналов от ПС, систему передачи данных (СПД) на борт ВС со своим передатчиком и АФУ, а в составе бортовой части - бортовое оборудование ОЭС со своими УФ-излучателями и УФ-приемниками и средствами обработки и визуализации сигналов, дополнительные приемники радиосигналов ПС на борту и бортовой ретранслятор радиосигналов ПС на землю, при этом группа выходов вычислителя соединена с соответствующей группой входов СПД, АФУ которой через эфир связано с АФУ бортового оборудования, с которым также через эфир связаны соответствующие АФУ СПС, через эфир выходы бортовых излучателей ОЭС связаны со входами наземных приемников ОЭС и наоборот.
На чертеже представлена блок-схема заявленного устройства.
Устройство содержит последовательно соединенные антенный модуль 1 с широкополосными антеннами 1.1.1, … 1.1.x и малошумящими высокочастотными усилителями 1.2.1, … 1.2.x, распределитель 2 радиосигналов с согласующими резисторами 2.1, 2.2, 2.3, … 2.у, блок (группу) 3 спутниковых приемников, состоящий из n спутниковых приемников 3.1, … 3.n, каждый из которых состоит из m каналов 3.1.1, … 3.1.m, вычислитель 4 и систему 5 передачи данных со своими передатчиком 5.I и АФУ 5.2, а также модуль 6 метеодатчиков.
В свою очередь первый канал первого приемника содержит модуль 7 управления с регистром 7.1 управления генератором 7.2 гармонических сигналов, генератором 7.3 дальномерного кода, синхрогенератором 7.4, генератором 7.5 строба накопления, генератором 7.6 сигнала задержки и часами 7.7 системы единого времени, программируемый коррелятор 8 с восемью умножителями 8.1, … 8.8, сдвиговым регистром 8.9 и независимыми накопителями 8.10, … 8.15, радиочастотный модуль 9, АЦП 10 и группу 11 входов инженерных вводов. Для других каналов и приемников аналогично.
Устройство также содержит локальную вычислительную сеть (ЛВС) 12, наземное оборудование оптико-электронной системы (ОЭС) 13 с группой ультрафиолетовых излучателей (УФи) 13.1, … 13.L, ультрафиолетовым приемником (УФп) 13.L+1 и системой обработки и визуализации (СОВ) 13.L+2, наземную систему 14 псевдоспутников 14.1, … 14.Z со своими передатчиками 14.1.1, … 14.Z.1 и АФУ 14.1.2, … 14.Z.2 и бортовое оборудование 15 с первым 15.1, вторым 15.2 и третьим 15.3 АФУ, ретранслятором 15.4, бортовыми УФп 15.5 и УФи 15.6 и бортовой СОВ 15.7.
Группа выходов метеодатчиков 6 соединена с соответстивующей группой входов вычислителя 4, вход и выход радиочастотного модуля 9 соединены с соответствующими выходом распределителя радиосигналов 2 и с первым входом АЦП 10, выход которого соединен с первыми входами первого 8.1 и второго 8.2 умножителей, вторые входы которых соединены соответственно с выходами sin и cos генератора 7.2 гармонических сигналов, выход первого умножителя 8.1 соединен с первыми входами третьего 8.3, четвертого 8.4 и пятого 8.5 умножителей, а выход второго умножителя 8.2 соединен с первыми входами шестого 8.6, седьмого 8.7 и восьмого 8.8 умножителей, вторые входы третьего 8.3 и шестого 8.6 умножителя соединены с выходом первого разряда сдвигового регистра (CP) 8.9, выход второго разряда которого соединен со вторыми входами четвертого 8.4 и седьмого 8.7 умножителя, а выход третьего разряда CP 8.9 соединен со вторыми входами пятого 8.5 и восьмого 8.8 умножителей, выходы третьего 8.3, четвертого 8.4, пятого 8.5, шестого 8.6, седьмого 8.7 и восьмого 8.8 умножителей соединены с соответствующими информационными входами независимых накопителей 8.10, … 8.15, первый, второй и тетий управляющие входы которых соединены соответственно с выходами синхрогенератора 7.4, генератора 7.5 строба накопления и часов 7.7 системы единого времени, выход генератора 7.3 дальномерного кода соединен с информационным входом CP 8.9, вход сдвигов которого соединен со входом 10 тактов АЦП и с выходом синхрогенератора 7.4, выход генератора 7.6 сигнала задержки соединен со входом управления синхрогенератора 7.4, группа 11 входов инженерных вводов, являющаяся группой входов управления данного первого канала 3.1.1 первого приемника 3.1, является группой входов устройства, группы информационных выходов независимых накопителей 8.10, … 8.15 первого и каждого другого канала каждого приемника через единую локальную вычислительную сеть соединены с группой информационных входов вычислителя 4, группа входов инженерных вводов которого связана с группой 11 входов устройства, а группа выходов которого связана с соответствующей группой входов СПД 5, АФУ 5.2 которой является радиочастотным выходом устройства, который через эфир связан с АФУ 15.3 бортового оборудования, с которым также через эфир связаны соответствующие АФУ 14.1.2, … 14.Z.2 СПС 14. Выход бортового излучателя УФи 15.6 ОЭС связан через эфир со входом наземного приемника УФп 13.2. Выходы наземных излучателей УФи 13.1, … 13.L связаны через эфир со входом бортового приемника УФп 15.5. Наземная система обработки и визуализации 13.L+2 связана с наземными УФи 13.1, … 13.L и УФп 13.L+1, а бортовая СОВ 15.7 связана с бортовыми УФп 15.5, УФи 15.6, первым АФУ 15.1 через ретранслятор 15.4, вторым АФУ 15.2 и третьим АФУ 15.3.
Система 16 навигационных спутников (НС) 16.1, … 16.К не входит в состав устройства и показана для пояснения.
Способ осуществляется следующим образом.
Перед началом работы СКС, установленной в заданной точке дислокации, через группу 11 входов (фиг.1) осуществляют инженерные вводы в память вычислителя 4 о точной географической дислокации данной СКС. Одновременно в регистр 7.1 управления модуля 7 управления каждого канала 3.1.1, … каждого приемника 3.1, … осуществляют инженерные вводы режима их работы. В простейшем случае в разъемы группы 11 входов вставляют соответствующие режимные карты, а в более сложном случае, допускающем перестройку режимов работы, вместо режимных карт подключают ЭВМ.
Равномерно рассредоточенные в пространстве над землей и вращающиеся вокруг нее на своих орбитах на большой высоте (например, для ГЛОНАСС 20000 км над земным шаром) навигационные спутники (НС) систем ГЛОНАСС (18 НС), GPS (24 НС) и GALILEO (30 НС) постоянно и синхронно для всех НС данной системы излучают на землю, покрывая всю ее поверхность, соответствующие каждой системе навигационные радиосигналы, представляющие собой для каждого НС повторяющиеся во времени сложные радиопосылки, получаемые в результате цифровой модуляции исходного гармонического колебания (несущей частоты, составляющей сотни мегагерц) кодовой последовательностью так называемого дальномерного кода. Кроме дальномерного кода - важнейшей составляющей передаваемой НС информации - в радиопосылках также содержится информация о параметрах движения НС, их номерах и местоположении, значения системы единого времени и др.
Ниже в рамках рассматриваемого технического решения центральное место занимает именно дальномерный код, который, будучи принятым приемником от нескольких НС с привязкой к системе единого времени (СЕВ), позволяет вычислить географические координаты места нахождения этого приемника, а в условиях заранее известного ответа (место дислокации СКС известно) оказывается возможным путем простейшего сравнения с помощью вычислителя 4 не только определить правильность решения задачи в целом, но и в условиях избыточности приемников, НС и самих систем НС, определить недопустимые аномалии радиосигналов, а также локализовать неисправности и сбои каждой из этих частей.
Прием радиосигналов НС осуществляется через последовательно соединенные антенный модуль 1 (фиг.1), распределитель 2 радиосигналов и БСП 3. Вначале на каждом приемнике 3.1, …3.n параллельно (ниже, например, рассматривается для приемника 3.1, предназначенного для первого НС системы ГЛОНАСС, для других - аналогично) осуществляется с помощью радиочастотного модуля 9 усиление радиосигналов НС, частотная селекция радиосигналов первого НС из смеси с шумами и помехами и преобразование радиосигналов с высокой частоты на промежуточную. Далее посылки радиосигналов на промежуточной частоте с помощью АЦП 10 последовательно преобразуются из аналоговой формы в цифровую, удобную для последующей статистической обработки нескольких смежных посылок радиосигналов с помощью программируемых корреляторов 8 и затем вычислителя 4.
С выхода АЦП 10, выполняющего функцию амплитудного квантования радиосигнала, получаемые на каждом такте квантования (чем выше частота тактов, тем точнее обработка) отсчеты, относящиеся к одной из текущих посылок дальномерного кода радиосигнала НС, с помощью коррелятора 8 сопоставляются с искусственно формируемым генератором 7.3 (опережающим, несмещенным и запаздывающим) заранее известным дальномерным кодом, записываемым в сдвиговый регистр (CP) 8.9. Сопоставление происходит побитно параллельно в умножителях 8.3, … 8.8 для опережающего, несмещенного и запаздывающего дальномерного кода, снимаемого с соответствующих выходов CP 8.9 с учетом фазы когерентного и некогерентного радиосигнала, вырабатываемого генератором 7.2 гармонических сигналов, подаваемых в умножители 8.3, … 8.8 через умножители 8.1 и 8.2. Обнаруживаемые совпадения отсчетов реального сигнала с искусственно формируемыми ожидаемыми сигналами с выходов умножителей фиксируются с заданной вероятностью раздельно в накопители 8.10, … 8.15 в строго определенные моменты в реальном масштабе времени в соответствии с часами 7.7 системы единого времени (СЕВ), фиксируя величину задержки прохождения дальномерного кода от данного НС до СКС и запоминая полную статистическую картину качества радиосигналов конкретного НС на интервале наблюдения (многих посылок радиосигналов), формируемым генератором 7.5 строба накопления (аналогично для других каналов 3.1.2, … 3.1.m других приемников 3.2, … 3.n, обслуживающих другие НС и другие системы), завершая первичную обработку. С помощью вычислителя 4 с применением соответствующего программного обеспечения осуществляется в квазиреальном масштабе времени вторичная обработка данных накопителей 8.10, … 8.15 таким образом, что для одного и того же момента времени получают расчетные данные географических координат СКС, полученные в результате анализа данных нескольких НС, а также нескольких спутниковых навигационных ситем. При совпадении расчетных географических координат с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих систем.
В условиях недопустимой аномалии радиосигналов НС 16.1, …16.К всех трех действующих сегодня навигационных систем 16 (радиопомехи, отказы и т.п.) бортовое оборудование 15 переходит по возможности на прием радиосигналов от системы 14 ПС с помощью АФУ 15.3, расположенного снизу ВС. Уместно подчеркнуть, что навигация ВС с помощью неподвижных ПС 14.1, … 14.Z существенно надежнее и точнее, чем с помощью подвижных НС 16.1, … 16.К, т.к у неподвижных наземных ПС очень точные выверенные константы дислокации. Однако сегодня навигация ВС с помощью только ПС (без использования НС) невозможна, т.к. ПС в настоящее время установлены локально под наиболее важными участками наиболее важных воздушных коридоров и, главным образом, при подлете к аэропортам.
Способ приема и обработки радиосигналов ПС 14.1, … 14.Z ничем не отличается от описанного выше в случае использования радиосигналов НС 16.1, … 16.К. При этом радиосигналы ПС отличаются своими радиопараметрами (частотами, фазами и т.п.). Поэтому в составе БСП 3 устанавливают соответствующие приемники в составе 3.1, … 3.n. Для контроля за работой системы 14 ПС и работающей с ней соответствующей части бортового оборудования 15 принимаемые данным ВС радиосигналы ПС 14.1, … 14.Z ретранслируют с помощью ретранслятора 15.4 и первого АФУ 15.1 через эфир на входы СКС 1.1.1, … 1.1.х, которая обрабатывает эти радиосигналы (аналогично как и радиосигналы от НС) и выдает соответствующие поправки с учетом точно известных данных каждого ПС (географических координат и др.) через СПД 5 и его элементы 5.1 и 5.2 в эфир и далее через третье АФУ 15.3 на борт ВС.
В условиях отсутствия видимости перед посадкой ВС, а также для обнаружения случайных препятствий на полосе посадки примерно за 10 км до начала посадочной полосы СКС рекомендует (также диспетчер аэропорта) пилоту данного ВС перейти на оптико-электронную систему (ОЭС), представляющую собой совокупность наземных 13.1, … 13.L и бортового 15.6 ультрафиолетовых (УФ) излучателей и наземного 13.L+1 и бортового 15.5 УФ-приемников со средствами обработки и визуализации местоположения ВС относительно посадочной полосы для пилота на борту - 15.7 и диспетчера на земле - 13.L+2, с помощью УФ-приемника 15.5 ВС наблюдают за УФ-излучателями 13.1, … 13.L на аэродроме и определяют угловые направления движения ВС и расстояния от ВС до УФ-излучателей 13.1, … 13.L, аналогично с помощью УФ-приемника 13.L+1 аэродрома наблюдают за УФ-излучателем 15.6 ВС для своевременного обнаружения ВС и определения его положения в пространстве диспетчером на земле, осуществляют обмен данными, полученными ОЭС, синхронно на земле и на борту и формируют интегрированную информацию с точностью порядка 1,0 м по дальности ВС до посадочной полосы.
Пилот ВС может и самостоятельно перейти на ОЭС. При этом на борту ВС на экране средств обработки и визуализации 15.7 пилот видит отметки всех УФ-излучателей 13.1, … 13.L, расположенных перед началом посадочной полосы и по ее краям (минимальное значение L равно 3), позволяющие пилоту вслепую выдерживать глиссаду с точностью до 1 м. Кроме того, ОЭС за счет вторичного отражения позволяет пилоту наблюдать на экране средств 15.7 обработки и визуализации силуэты самой посадочной полосы и случайных крупных препятствий на ней (другого ВС, машин и т.п.), своевременное выявление которых может предотвратить катастрофу.
Устройство работает следующим образом.
Устройство представляет собой комплекс из наземной СКС, состоящей из элементов 1, … 6 и 12, наземной ОЭС 13, наземной системы 14 ПС и бортового оборудования 15. При этом пусть, например, блок 3 спутниковых приемников 3.1, … 3.n содержит по одному основному и одному резервному приемнику для каждой из трех существующих навигационных систем и системы 14 ПС. Тогда n=8.
Различные спутниковые системы имеют существенные базовые отличия (например, в системе ГЛОНАСС каждый спутник излучает радиосигналы на собственной несущей частоте, а в системе GPS - на одной и той же, но с различными фазовыми сдвигами, все системы имеют разное число спутников и т.п.), что при построении высококачественных приемников привело к их отличающейся специализации.
С помощью широкополосного антенного модуля 1 (см. чертеж) принимают вместе с помехами и шумами радиосигналы от всех трех систем. Причем для наилучшего охвата небосвода антенный модуль 1 состоит из нескольких отдельных антенн 1.1.1, … 1.1.x со своими малошумящими высокочастотными усилителями и полосовыми фильтрами 1.2.1, … 1.2.x. Суммарный радиосигнал с выходов модуля 1 поступает на распределитель 2, предназначенный для согласованного распределения между всеми работающими параллельно приемниками 3.1, … 3.n с помощью резисторов 2.1, 2.2, 2.3, … 2.у, обеспечивающих минимальные волновые отражения радиосигнала.
Для простоты рассмотрим работу устройства при 24-канальных приемниках (m=24) для всех трех систем на примере первого канала 3.1.1 первого приемника 3.1. При этом каждый из каналов может иметь одинаковые или свои отличающиеся от других каналов режимы работы, устанавливаемые перед началом работы устройства через вход 11 инженерных вводов, активизирующих в модуле 7 управления регистр 7.1 управления (путем записи в него соответствующей инструкции), который определяет с помощью генератора 7.2 гармонических сигналов их частоту и фазу на соответствующих выходах sin и cos с помощью генератора 7.3 дальномерного кода (обычно он известен и неизменен, но в особых условиях может быть изменен), с помощью синхрогенератора 7.4 частоту тактов обработки, с помощью генератора 7.5 строба накопления величину интервала выборки данных, с помощью генератора 7.6 задержки величину задержки тактов синхрогенератора и с помощью часов 7.7 СЕВ синхронизацию этих часов с системой единого времени (СЕВ), а также запись в вычислитель 4 географических координат места дислокации СКС.
В радиочастотном модуле 9 осуществляется усиление радиосигналов и их селекция на фоне шумов и помех для первого НС системы ГЛОНАСС, а также преобразование радиосигналов с высокой частоты на промежуточную, после чего радиосигнал подают на вход АЦП 10, на выходе которого получают последовательность двоичных отсчетов, соответствующих исходному дальномерному коду, которые далее поступают на вход коррелятора 8.
Обработка радиосигналов с помощью коррелятора 8 и вычислителя 4 представлена выше при описании способа. Необходимо лишь добавить, что результаты расчетов в вычислителе 4 уточняются по данным модуля 6 метеодатчиков. Через группу выходов 5 вычислителя потребителям информации (главным образом самолетам) с помощью средств связи и передачи данных (здесь не приводятся, т.к. выходят за рамки рассматриваемого технического решения) передается, например, следующая информация:
- все системы функционируют нормально,
- ГЛОНАСС (или №№ НС…) использовать нельзя
- GPS (или №№ НС…) использовать нельзя.
- GALILEO (или №№ НС…) использовать нельзя,
- примите поправки.
При невозможности навигации ВС по всем трем спутниковым навигационным системам бортовое оборудование 15 ВС, как уже указывалось выше, переходит на прием радиосигналов от системы 14 ПС, псевдоспутники 14.1, … 14.Z которые представляют собой наземный аналог системы НС 16.1, … 16.К со своими передатчиками 14.1.1, … 14.Z.1 и своими АФУ 14.1.2, … 14.Z.2, ориентированными и излучающими радиосигналы вверх, которые принимает ориентированное вниз АФУ 15.3 бортового оборудования 15 ВС. Принимаемые на борту ВС от системы 14 ПС радиосигналы поступают на бортовую систему обработки и визуализации 15.7 (она содержит типовой навигационный приемник для ПС) местонахождения ВС.
При невозможности навигации ВС по всем спутниковым системам, в т.ч. - ПС, при приближении к аэропорту и при отсутствии видимости используют ОЭС, наземные УФ-излучатели 13.1, … 13.L которой обозначают начало и стороны посадочной полосы, а также могут быть расположены под важными воздушными коридорами для движения ВС, что позволяет пилоту ВС осуществлять навигацию ВС при отсутствии спутниковых радиосигналов и при плохой видимости как на трассе, так и при посадке.
Одновременно диспетчерская наземная служба аэропорта (возможно и на трассе), принимая на УФ-приемнике 13.L+1 сигналы от бортового УФ-излучателя 15.6 своевременно обнаруживает и определяет местоположение ВС.
Синхронизированная информация ОЭС пилота и диспетчера взаимно уточняется и дополняется.
В составе ОЭС вместо УФ-излучателя (приемника) используют также инфракрасные излучатели (приемники).
Изобретение относится к области измерительной техники и может быть использовано для определения местоположения и посадки воздушного судна. Технический результат - расширение функциональных возможностей. Для достижения данного результата осуществляют прием радиосигналов навигационных спутников (НС) последовательно через антенный модуль, распределитель радиосигналов и группу приемников. При этом на каждом приемнике осуществляют усиление радиосигналов НС, селекцию полезной составляющей из смеси с помехами и шумами, преобразование очищенного радиосигнала с высокой частоты на промежуточную с помощью радиочастотного модуля. После этого осуществляют функциональные преобразования радиосигналов, обеспечивая поддержку основных режимов формирования параметров и характеристик интегрированной навигационной обстановки при посадке воздушного судна. 2 н. и 2 з.п. ф-лы, 1 ил.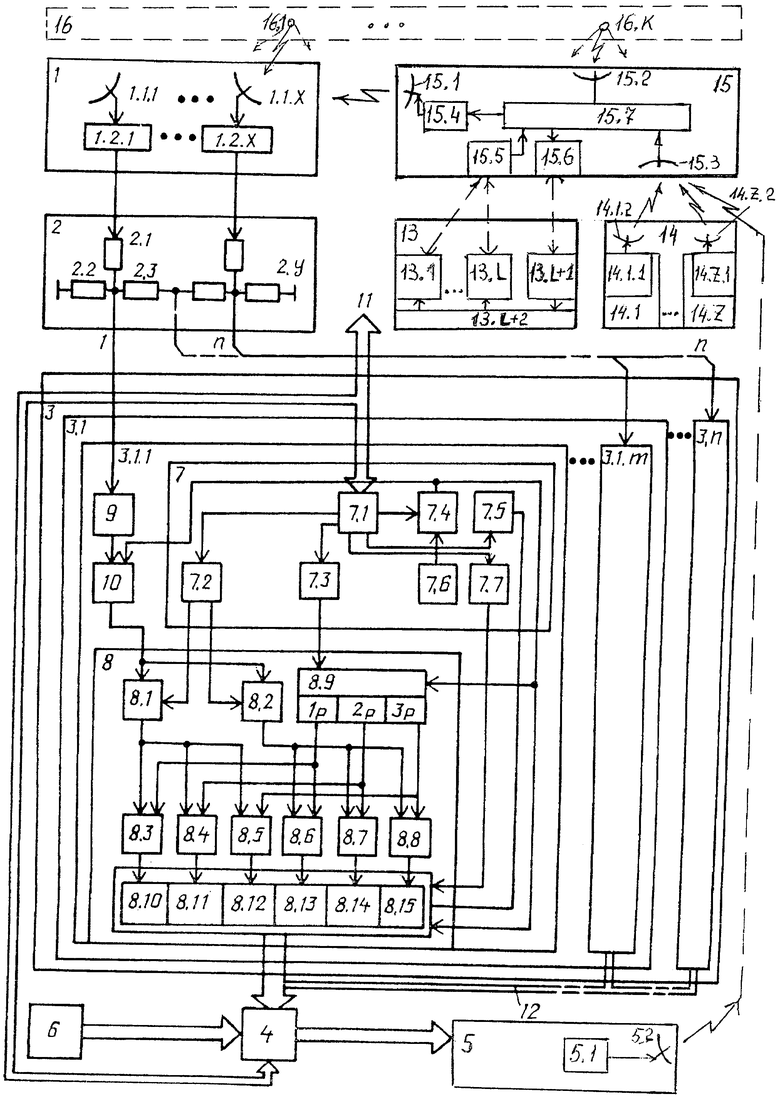
1. Комплексированный универсальный всепогодный способ определения местоположения и посадки воздушного судна, включающий прием радиосигналов навигационных спутников (НС) последовательно через антенный модуль, распределитель радиосигналов и группу приемников, при этом на каждом приемнике осуществляют усиление радиосигналов НС, селекцию полезной их составляющей из смеси с помехами и шумами и преобразование очищенного радиосигнала с высокой частоты на промежуточную с помощью радиочастотного модуля, после чего осуществляют аналого-цифровое преобразование с помощью АЦП, а затем осуществляют анализ на вычислителе выходных данных группы приемников совместно с данными метеодатчиков температуры, давления и влажности воздуха и выработку сигналов качества навигационной информации и поправок к ней для ее потребителей, причем прием и анализ радиосигналов НС осуществляют с помощью высокоточной наземной стационарной контрольной станции (СКС) с заранее точно определенными параметрами ее дислокации, содержащей в своем составе в качестве группы приемников такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая, обладая резервированием приемников, воспринимает радиосигналы НС от навигационных спутниковых систем ГЛОНАСС, GPS и GALILEO и осуществляет их цифровую статистическую обработку с помощью программируемых корреляторов, при этом перед началом работы СКС осуществляют инженерные вводы в память ее вычислителя о точной географической дислокации СКС и режимах ее работы, а в регистр управления модуля управления каждого приемника - режимов его работы и его коррелятора, а затем в процессе работы СКС осуществляют одновременный прием радиосигналов всех НС, находящихся в зоне радиовидимости, причем корреляционную обработку сигналов НС по каждой из навигационных спутниковых систем осуществляют на группе своих m-канальных приемников по каждому из НС раздельно в своем соответствующем канале на своем корреляторе, имеющем заранее перед началом работы запрограммированные данные структуры дальномерного кода и временной задержки его начального фронта, временного размера строба корреляционного накопления, частоты и начальной фазы гармонического сигнала и частоты тактов синхрогенератора, в результате корреляционной обработки в реальном масштабе времени в выходном накопителе каждого коррелятора фиксируют с привязкой к системе единого времени с заданной вероятностью правильного обнаружения для каждого НС в зоне его радиовидимости каждой спутниковой навигационной системы величину задержки прохождения дальномерного кода от каждого НС до СКС, затем на вычислителе сопоставляют выходные данные, полученные от БСП, таким образом, что для одного и того же текущего фиксированного момента времени получают расчетные данные географических координат СКС, полученные на основе принятых от различных спутниковых навигационных систем, при их совпадении между собой и с контрольными данными дислокации самой СКС вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих систем, отличающийся тем, что при выявлении средствами СКС недопустимой аномалии радиосигналов НС СКС рекомендует воздушному судну (ВС) перейти для успешной навигации от использования радиосигналов НС к использованию радиосигналов псевдоспутников (ПС), представляющих собой наземную стационарную систему ПС, сконцентрированных в районе аэропортов и под коридорами движения ВС и имеющих отличающиеся индивидуальные параметры радиосигналов, которые воспринимаются бортовым оборудованием ВС, антенна которого расположена снизу ВС с ориентацией на землю, и далее обрабатываются аналогично радиосигналам НС, с помощью бортового ретранслятора радиосигналы ПС возвращают на землю, где их принимают с помощью соответствующих приемников СКС для контроля правильности работы ПС, затем от СКС через систему передачи данных направляют на борт данного ВС информацию о качестве работы системы ПС, в условиях плохой видимости при подлете ВС к аэропорту примерно за 10 км до начала посадочной полосы СКС рекомендует данному ВС перейти на оптико-электронную систему (ОЭС), представляющую собой совокупность наземных и бортовых ультрафиолетовых (УФ) излучателей и приемников со средствами обработки и визуализации местоположения ВС относительно посадочной полосы для пилота на борту и диспетчера на земле, с помощью УФ-приемника ВС наблюдают за УФ-излучателями на аэродроме и определяют угловые направления ВС и расстояния от ВС до УФ-излучателей, аналогично с помощью УФ-приемников аэродрома наблюдают за УФ-излучателями на ВС для своевременного обнаружения ВС и определения его положения в пространстве диспетчером на земле, осуществляют обмен данными, полученными ОЭС синхронно на земле и на борту и формируют интегрированную информацию с точностью порядка 1,0 м по дальности ВС до посадочной полосы.
2. Способ по п.1, отличающийся тем, что системы СКС, ПС и ОЭС используют раздельно или в любом сочетании.
3. Устройство комплексированного универсального всепогодного определения местоположения и посадки воздушного судна, содержащее последовательно соединенные антенный модуль, распределитель радиосигналов, группу спутниковых приемников, вычислитель и группу выходов вычислителя для выдачи информации потребителям, а также модуль метеодатчиков, группа выходов которого соединена с соответствующей группой входов вычислителя, что представляет собой высокоточную наземную стационарную контрольную станцию (СКС), антенный модуль которой содержит несколько широкополосных антенн со своими малошумящими высокочастотными усилителями, обеспечивающих равномерный прием радиосигнала заданного диапазона со всего небосвода, а группа спутниковых приемников представляет такую их совокупность n, конструктивно объединенную в блок спутниковых приемников (БСП), которая содержит в себе приемники, воспринимающие одновременно радиосигналы от навигационных спутниковых систем ГЛОНАСС, GPS и GALILEO, при этом БСП для каждой из этих систем содержит группу приемников с резервированием их, а каждый приемник является m-канальным с закреплением каждого канала за одним из НС, причем каждый отдельный канал содержит радиочастотный модуль, АЦП, модуль управления приемником в составе генераторов гармонических сигналов, дальномерного кода, синхротактов, строба накопления и сигналов задержки, программируемый коррелятор в составе восьми умножителей, трехразрядного сдвигового регистра и шести независимых накопителей, группу информационных выходов и группу входов инженерных вводов, вход и выход радиочастотного модуля соединены с соответствующими выходом распределителя радиосигналов и с первым входом АЦП, выход которого соединен с первыми входами первого и второго умножителей, вторые входы которых соединены соответственно с выходами «sin» и «cos» генератора гармонических сигналов, выход первого умножителя соединен с первыми входами третьего, четвертого и пятого умножителей, а выход второго умножителя соединен с первыми входами шестого, седьмого и восьмого умножителей, вторые входы третьего и шестого умножителей соединены с выходом первого разряда сдвигового регистра (CP), выход второго разряда которого соединен со вторыми входами четвертого и седьмого умножителей, а выход третьего разряда CP соединен со вторыми входами пятого и восьмого умножителей, выходы третьего, четвертого, пятого, шестого, седьмого и восьмого умножителей соединены с соответствующими информационными входами накопителей, первый и второй управляющие входы которых соединены соответственно с выходами синхрогенератора и генератора строба накопления, выход генератора дальномерного кода соединен с информационным входом CP, вход сдвигов которого соединен со входом тактов АЦП и с выходом синхрогенератора, выход генератора сигнала задержки соединен со входом управления синхрогенератора, группа входов инженерных вводов, являющаяся группой входов управления данного канала приемника, является группой входов устройства, группы информационных выходов накопителей каждого канала каждого приемника через единую локальную вычислительную сеть соединены с группой информационных входов вычислителя, осуществляющего в квазиреальном масштабе времени вторичную обработку данных накопителей таким образом, что для одного и того же момента времени получают расчетные данные географических координат СКС, полученные в результате анализа данных нескольких НС, а также нескольких спутниковых навигационных систем, при этом при совпадении расчетных географических координат с контрольными данными дислокация самой UKC вырабатывают решение об исправности конкретных НС всех трех навигационных систем, а при несовпадении констатируют недопустимую аномалию радиосигналов соответствующих НС соответствующих систем, отличающееся тем, что устройство дополнительно содержит в составе своей наземной части систему псевдоспутников (ПС) со своими передатчиками и антенно-фидерными устройствами (АФУ), наземное оборудование оптико-электронной системы (ОЭС) со своими ультрафиолетовыми (УФ) излучателями и приемниками и средствами обработки и визуализации сигналов, дополнительные приемники радиосигналов ПС в составе БСП СКС для приема сигналов от ПС, систему передачи данных (СПД) на борт ВС со своим передатчиком и АФУ, а в составе бортовой части - бортовое оборудование ОЭС со своими УФ-излучателями и УФ-приемниками и средствами обработки и визуализации сигналов, дополнительные приемники радиосигналов ПС на борту и бортовой ретранслятор радиосигналов ПС на землю, при этом группа выходов вычислителя соединена с соответствующей группой входов СПД, АФУ которой через эфир связано с АФУ бортового оборудования, с которым также через эфир связаны соответствующие АФУ СПС, через эфир выходы бортовых излучателей ОЭС связаны со входами наземных приемников ОЭС, и наоборот.
4. Устройство по п.3, отличающееся тем, что в качестве системы ОЭС используют совокупность наземных и бортовых инфракрасных излучателей и приемников.
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕДОПУСТИМОЙ АНОМАЛИИ ПРИНИМАЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2393504C1 |
| Высотная ветроэлектрическая станция | 1933 |
|
SU39701A1 |
| Комбинированные плоскогубцы для электромонтажных работ | 1930 |
|
SU26643A1 |
| US 20070085734 А1, 19.04.2007 | |||
| US 5525999 А, 11.06.1996 | |||
| US 5621646 А, 15.04.1997. | |||

