Изобретение относится к областям глобальных навигационных спутниковых систем, радиотехники, вычислительной техники, связи и может быть использовано для повышения безопасности полетов воздушных судов (ВС).
Известен способ одновременного использования геометрической и барометрической высоты группы находящихся вблизи друг от друга и оцениваемого ВС с целью мониторинга его средств вертикального эшелонирования, описанный в статье [Б.В. Лебедев «Мониторинг средств вертикального эшелонирования на основе использования автоматического зависимого наблюдения вещательного типа», журнал «Авиакосмическое приборостроение», №1, 2003 г, стр.56-60], использующий сопоставление барометрической высоты, получаемой на данном ВС с помощью бортового барометрического высотомера, и геометрической высоты, получаемой с помощью навигационного приемника (НП) нескольких находящихся в рассматриваемом пространстве ВС путем осереднения их значений.
В известном способе не решалась задача оценки выходных сигналов бортовых НП, представляющих собой сегодня важную навигационную аппаратуру потребителей (НАП).
Наиболее близким по технической сущности к заявляемому способу является способ по изобретению «Способ периодического контроля (мониторинга) средств измерения барометрической высоты самолетов при их эксплуатации [патент РФ №2221221 по МПК G01C 23/00 от 25.04.2002 г.], характеризующийся использованием на борту оцениваемого в полете воздушного судна (ВС), как и на ВС, находящихся в полете вблизи оцениваемого, спутникового навигационного приемника, представляющего собой навигационную аппаратуру потребителей (НАП), вычисляющую геометрическую высоту, штатного барометрического высотомера и штатного оборудования автоматического зависимого наблюдения (АЗН), на оцениваемом ВС получают информацию о барометрической и геометрической высоте от n окружающих ВС по каналу АЗН в ограниченном диапазоне высот.
Прототип, так же как и аналог, посвященный контролю средств измерения барометрической высоты конкретного ВС, не осуществляет контроля выходных сигналов бортовой НАП этого ВС, и в целом при периодических проверках с учетом данных окружающих ВС не позволяет повысить целостность выходных сигналов НАП конкретного ВС.
Уместно подчеркнуть важность качественной работы бортовой НАП, вычисляющей не только геометрическую высоту конкретного ВС (дополнительно к барометрической), но и вообще все координаты этого ВС - его положение в пространстве.
Техническим результатом и целью заявляемого изобретения является расширение функциональных возможностей прототипа за счет обеспечения возможности контроля работоспособности бортовых НАП и повышения целостности их выходных сигналов путем одновременного использования возможностей на конкретном ВС бортовых НАП, барометрического высотомера и средств автоматического зависимого наблюдения (АЗН) за счет совместного анализа данных геометрической и барометрической высот, получаемых на конкретном ВС, и подобных данных, получаемых по каналу АЗН, от n ВС, окружающих конкретный ВС.
Указанные технический результат и цель достигаются тем, что способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников, характеризующийся использованием на борту оцениваемого в полете воздушного судна (ВС), как и на ВС, находящихся в полете вблизи оцениваемого, спутникового навигационного приемника, представляющего собой навигационную аппаратуру потребителей (НАП), вычисляющую геометрическую высоту, штатного барометрического высотомера и штатного оборудования автоматического зависимого наблюдения (АЗН), на оцениваемом ВС получают информацию о барометрической и геометрической высоте от n окружающих ВС по каналу АЗН в ограниченном диапазоне высот, на оцениваемом ВС вычисляют разницу между барометрической и геометрической высотами для каждого из n окружающих ВС и осредняют полученные значения, получают для оцениваемого ВС разницу между его барометрической и геометрической высотами, а далее сопоставляют осредненную разницу высоте разницей высот данного ВС, если при этом сопоставлении разница указанных значений превышает допуск, то формируют сигнал о неисправности оцениваемой НАП, при этом при расширении используемого диапазона высот, в котором могут находиться участвующие ВС, в разности между геометрической и барометрической высотами вводят поправки на давление и температуру воздуха в соответствии с дифференциальным уравнением статики атмосферы.
На фиг.1 представлен эскиз взаимодействия оборудования, используемого в способе.
Изображены данное ВС 1 (оцениваемое ВС, в котором проверяют его НАП), группа 2 ВС, окружающих оцениваемое ВС, группа 3 навигационных спутников (НС), наземная станция 4, НАП 5, приемник 6 и передатчик 7 АЗН, барометрический высотомер 8, лучи 9 распространения радиопосылок НС, лучи 10 распространения информации АЗН от передатчиков к приемникам.
Способ характеризуется использованием на борту оцениваемого в полете воздушного судна (ВС) 1, как и на ВС 2, находящихся в полете вблизи оцениваемого, спутникового навигационного приемника, представляющего собой навигационную аппаратуру потребителей (НАП) 5, вычисляющую геометрическую высоту, штатного барометрического высотомера 8 и штатного оборудования автоматического зависимого наблюдения (АЗН) 6 и 7, на оцениваемом ВС 1 получают информацию о барометрической и геометрической высоте от n окружающих ВС 2 по каналу АЗН 10 в ограниченном диапазоне высот, на оцениваемом ВС 1 вычисляют разницу между барометрической и геометрической высотами для каждого из n окружающих ВС 2 и осредняют полученные значения, получают для оцениваемого ВС 1 разницу между его барометрической и геометрической высотами, а далее сопоставляют осредненную разницу высоте разницей высот данного ВС 1, если при этом сопоставлении разница указанных значений превышает допуск, то формируют сигнал о неисправности оцениваемой НАП 5, при этом при расширении используемого диапазона высот, в котором могут находиться участвующие ВС 2, в разности между геометрической и барометрической высотами вводят поправки на давление и температуру воздуха в соответствии с дифференциальным уравнением статики атмосферы.
Способ осуществляется следующим образом.
Пусть в некотором воздушном пространстве летят по своим трассам данное ВС 1 и группа 2 ближайщих или окружающих его ВС (фиг.1) и пусть все эти ВС принимают на свои спутниковые НАП 5 периодические радиопосылки 9 от ближайших к ним радиовидимых НС глобальной спутниковой навигационной системы 3 (ГЛОНАСС или GPS или GALILEO, или от нескольких систем в любом сочетании в зависимости от типа применяемого НАП 5). Также радиопосылки 9 от радиовидимых НС системы 3 принимает на свою НАП 5 ближайшая к рассматриваемой области воздушного пространства наземная станция, например локальная контрольно-корректирующая станция (ЛККС) 4, дислоцирующаяся, как правило, вблизи аэропортов (в РФ, на сегодня общее число ЛККС более 50).
Следует отметить, что НАП 5 выбирает радиовидимые НС 3 автоматически (перебором по устойчивости радиопосылок 9), причем для определения географических координат наземной ЛККС 4 достаточно принять радиопосылки 9 от трех любых НС 3, а для определения географических координат местоположения ВС 1 в пространстве (также любого ВС из группы 2) - четырех любых НС системы 3.
Пусть кроме того на всех ВС 1 и 2 и ЛККС 4 установлены НАП 5 (на ЛККС 4 всех трех навигационных систем с дублированием), приемники 6 и передатчики 7 АЗН, а на всех ВС 1 и 2 - еще и барометрические высотомеры 8 (фиг.1)
При этом каждое ВС 1 и 2 при исправности оборудования группы 3 НС и НАП 5 в каждый момент времени полета знает свое местоположение в пространстве с высокой точностью (десятки метров) и, как следствие, из этого высоту над землей - геометрическую высоту. Кроме того, каждое ВС 1 и 2 определяет с помощью своих барометрических высотомеров 8 барометрическую высоту, которая в идеале может совпадать с геометрической высотой. Через свой передатчик 7 АЗН каждое ВС 1 и 2 периодически передает всем другим ВС и ЛККС 4 данные своего местоположения и высоты, а через свой приемник 6 АЗН принимает данные от всех других ВС об их местоположении и их высоте. Через передатчик 7 ЛККС 4 передает, а все ВС 1 и 2 с помощью своих приемников 6 АЗН принимают высокоточные поправки к параметрам их движения и полетные рекомендации на основе полученных в ЛККС 4 данных о «спутниковой погоде» (в связи с обнаруженными аномалиями НС в навигационных системах 3 и даже целых навигационных систем - соответствующие запреты на использование).
Тогда собственно сущность способа состоит в следующем.
Данное ВС 1 передает с помощью передатчика 7 АЗН всем окружающим его ВС 2 свои географические координаты и барометрическую и геометрическую высоты и принимает значения с помощью приемника 6 АЗН от всех окружающих ВС 2 их географические координаты и значения барометрической и геометрической высоты, далее для данного ВС 1 в нем вычисляют разницу между барометрической и геометрической высотами для себя и для каждого из n окружающих ВС 2 и осредняют полученные для всех окружающих ВС 2 разницы между барометрической и геометрической высотой, после чего сопоставляют осредненную разницу высоте разницей высот данного ВС 1, если при этом сопоставлении разница указанных значений превышает допуск, формируют сигнал неисправности оцениваемого НАП 5 данного ВС 1 и по высоте и по географическим координатам в целом. При этом неисправный НАП 5 оцениваемого ВС 1 был обнаружен без наземной ЛККС 4, что сегодня является актуальным, т.к. число используемых в настоящее время ЛККС 4 с установленными средствами 6 и 7 АЗН крайне недостаточно.
При относительно близких значениях высоты между собой у ВС 1 и 2 (для чего при больших n делают благоприятную выборку из ВС 2) влиянием температуры и барометрического давления окружающего воздуха пренебрегают, но при расширении используемого диапазона высот (например, при малом n) в разности между геометрической и барометрической высот вводят поправки на давление и температуру воздуха в соответствии с дифференциальным уравнением атмосферы.
В случае наличия наземной ЛККС 4 со средствами 6 и 7 АЗН в зоне приема сигналов АЗН от оцениваемого ВС 1 и окружающих его ВС 2 получают данные от этих ВС в наземном оборудовании АЗН и контролируют целостность НАП на всех наблюдаемых ВС (п.2 формулы изобретения), причем с более высоким качеством и с учетом «спутниковой погоды», отслеживаемой в высокоточной ЛККС 4.
Для любого другого ВС из группы 2 имеется полная аналогия сказанному выше для ВС 1.
Изобретение относится к измерительной технике и может найти применение в системах контроля целостности выходных сигналов бортовых спутниковых навигационных приемников. Технический результат - расширение функциональных возможностей. Для этого на борту оцениваемого в полете воздушного судна (ВС) и на ВС, находящихся в полете вблизи оцениваемого спутникового навигационного приемника, получают информацию о барометрической и геометрической высоте от n окружающих ВС по каналу штатного оборудования автоматического зависимого наблюдения (АЗН). На оцениваемом ВС вычисляют разницу между барометрической и геометрической высотами для каждого из n окружающих ВС и осредняют полученные значения, получают для оцениваемого ВС разницу между его барометрической и геометрической высотами, сопоставляют осредненную разницу высоте разницей высот данного ВС. Вводят поправки на давление и температуру воздуха в соответствии с дифференциальным уравнением статики атмосферы. При получении данных АЗН от наблюдаемых ВС в наземном оборудовании АЗН контролируют целостность навигационной аппаратуры потребителей (НАП) на всех наблюдаемых ВС. 1 з.п. ф-лы, 1 ил.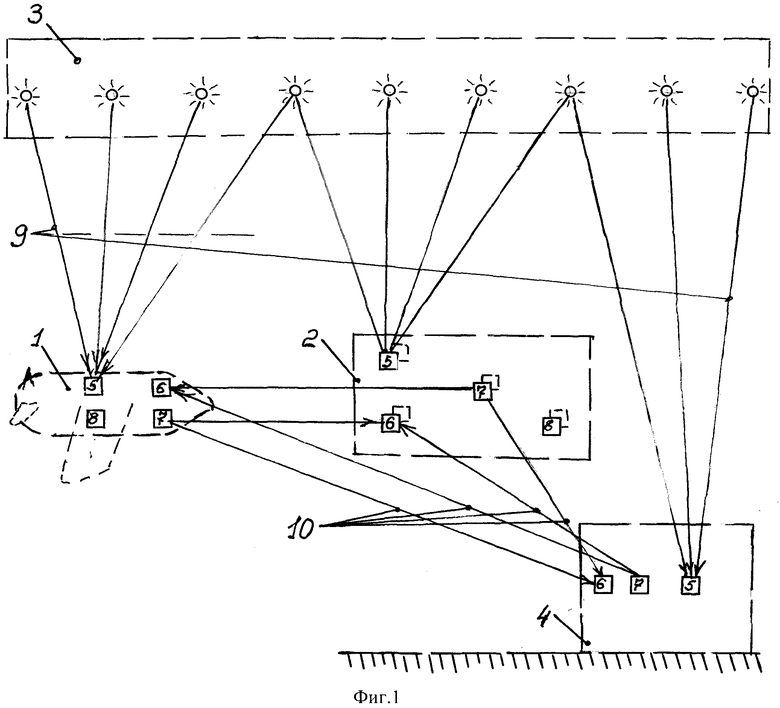
1. Способ повышения целостности выходных сигналов бортовых спутниковых навигационных приемников, характеризующийся использованием на борту оцениваемого в полете воздушного судна (ВС), как и на ВС, находящихся в полете вблизи оцениваемого, спутникового навигационного приемника, представляющего собой навигационную аппаратуру потребителей (НАП), вычисляющую геометрическую высоту, штатного барометрического высотомера и штатного оборудования автоматического зависимого наблюдения (АЗН), на оцениваемом ВС получают информацию о барометрической и геометрической высоте от n окружающих ВС по каналу АЗН в ограниченном диапазоне высот, отличающийся тем, что на оцениваемом ВС вычисляют разницу между барометрической и геометрической высотами для каждого из n окружающих ВС и осредняют полученные значения, получают для оцениваемого ВС разницу между его барометрической и геометрической высотами, а далее сопоставляют осредненную разницу высоте разницей высот данного ВС, если при этом сопоставлении разница указанных значений превышает допуск, то формируют сигнал о неисправности оцениваемой НАП, при этом при расширении используемого диапазона высот, в котором могут находиться участвующие ВС, в разности между геометрической и барометрической высотами вводят поправки на давление и температуру воздуха в соответствии с дифференциальным уравнением статики атмосферы.
2. Способ по п.1, отличающийся тем, что при получении данных АЗН от наблюдаемых ВС в наземном оборудовании АЗН контролируют целостность НАП на всех наблюдаемых ВС.
| СПОСОБ ПЕРИОДИЧЕСКОГО КОНТРОЛЯ (МОНИТОРИНГА) СРЕДСТВ ИЗМЕРЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ САМОЛЕТОВ ПРИ ИХ ЭКСПЛУАТАЦИИ | 2002 |
|
RU2221221C1 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2385470C1 |
| СОЛОВЬЕВ Ю.А | |||
| Системы спутниковой навигации | |||
| - М.: КТЦ-"Эко-Трендз", 2000, с.368 | |||

