Область техники
Изобретения относятся к области ракетно-комической техники, а точнее к сегменту космических ракетоносителей многократного применения, и направлены на совершенствование аэродинамических компоновок и способов возвращения на космодром многоразовых ракетно-авиационных модулей (МРАМ), образующих первую ступень ракетоносителя.
Уровень техники
Одним из направлений развития частично многоразовой транспортной космической системы (МТКС) Space Shuttle была проработка вариантов создания многоразовых первых ступеней ракетоносителя в дополнение к имеющемуся крылатому космическому кораблю, который завершает полет посадкой на аэродром. Часть результатов этой проработки отражена в патенте US 4834324, опубликованном 30 мая 1989 года. Возвращаемый ракетный ускоритель (ВРУ) состоит из корпуса, включающего баки для окислителя и горючего, носовой отсек с удлиненным конусообразным обтекателем, ракетную установку из нескольких жидкостных ракетных двигателей (ЖРД) в хвостовой части (трех основных кислородно-водородных и от двух до четырех вспомогательных двигателей на углеводородном топливе), и средств обеспечения самолетной посадки. В состав этих средств входят: установленное на нижней поверхности корпуса прямое цельноповоротное крыло с механизмами для его поворота на 90° и фиксации в крайних положениях, вертикальное и горизонтальное оперение, каждое из которых состоит из двух выдвижных поверхностей, расположенных соответственно на консолях крыла и в носовом отсеке, а также колесного шасси. Посадочное устройство состоит из двух основных убираемых в ниши корпуса колесных опор и передней убираемой в носовой отсек колесной опоры. В стартовой конфигурации, когда крыло расположено вдоль корпуса и все самолетные элементы убраны, этот многоразовый ускоритель по критерию компактности практически не отличается от обычных одноразовых ускорителей, что обеспечивает возможность формирования многоблочных компоновок ракет-носителей.
В патенте US 4834324 применительно к вышеописанному ВРУ основным вариантом его использования заявлена возможность применения в качестве одноступенчатого ракетоносителя, способного произвести вертикальный старт, выход на орбиту, спуск в атмосфере и самолетную посадку (Single-Stage-to-Orbit - SSTO), а вторым - в качестве многоразового модуля первой ступени. В формуле изобретения непосредственно способы возвращения этого летательного аппарата к месту старта не изложены, но по опубликованным сведениям (в том числе и в упомянутых далее патентах) для заданной конфигурации возможны несколько вариантов завершения полета. В варианте SSTO сход с орбиты и значительная часть траектории спуска выполняются со сложенными аэродинамическими поверхностями, а их выдвижение в рабочее положение производится после завершения участка интенсивного аэродинамического нагрева. Затем осуществляется планирование и заход на посадку этого аппарата аналогично тому, как это реализовано на кораблях «Space Shuttle». В варианте использования в качестве первой ступени ракетоносителя выдвижение крыла и органов аэродинамического управления в рабочее положение может производиться на высотах, близких к динамическому потолку траектории полета этого объекта, где скоростной напор снижается до минимальной величины. При выполнении операции разделения со второй ступенью ракетоносителя на скорости до М≈3.3 возвращение на космодром может быть осуществлено в режиме планирования без повторного включения ракетной установки. Если же разделение ступеней осуществляется на большей скорости (в диапазоне чисел Маха от М=3.3 до примерно М=8), то выполняется маневр ВРУ с набором высоты и разворотом его вектора скорости в сторону космодрома. При этом включение вспомогательных ракетных двигателей ВРУ (углеводородных или кислородно-углеводородных) на заданном интервале времени обеспечивает повышение уровня механической энергии до величины, достаточной для достижения аэродрома космодрома в режиме планирования.
Однако предложенным в патенте US 4834324 вариантам компоновки ВРУ свойственен и ряд недостатков, на которые указывали авторы последующих изобретений, а самым уязвимым техническим решением этого патента является аэродинамическая компоновка вертикального и горизонтального оперения. В конфигурации возвратного полета плечо вертикального оперения для создания момента в путевом канале незначительно и к тому же на больших углах атаки его эффективность будет понижаться за счет аэродинамического затенения. Применение переднего горизонтального оперения на гиперзвуковых скоростях полета и больших углах атаки пока остается проблематичным. Поэтому при такой конфигурации органов аэродинамического управления вызывает сомнение возможность успешного решения задачи обеспечения требуемой балансировки и управления полетом летательного аппарата в заданном для него диапазоне скоростей.
Если в компоновке ВРУ не используются вспомогательные ракетные двигатели, то тогда операция разделения должна осуществляться до М=3.3 и, следовательно, значительная часть ракетного топлива для участка выведения должна размещаться во второй ступени, что ведет к ее «переразмереванию», а, в конечном счете, к понижению эффективности ракетоносителя в целом. Установка же на ВРУ вспомогательных углеводородных двигателей и размещение необходимого для них топлива влечет за собой увеличение веса первой ступени и также снижает долю полезной нагрузки в стартовой конфигурации ракетной системы.
Относительно варианта использования описанного ракетного модуля в качестве SSTO необходимо отметить следующее. Во-первых, поворот прямого крыла на больших скоростных напорах в несимметричной аэродинамической конфигурации (а именно такая операция неизбежна для этого модуля при спуске в атмосфере) пока никому успешно осуществить не удалось. Во-вторых, в США в конце 90-х годов XX века была предпринята попытка разработки реального SSTO (проект «Venture Star»), но в результате было определено, что создание эффективного летательного аппарата по этой концепции на существующем тогда технологическом уровне невозможно.
В развитии проекта «Энергия-Буран» также определялись возможности спасения отработавших первых ступеней ракетоносителя способом самолетной посадки на аэродромы 1 класса. В патенте RU 2053936 от 10.02.1996 сформирован облик многоразового возвращаемого крылатого ракетного блока, который предложено конструктивно исполнить в виде двух объединенных силовыми связями моноблоков: ракетного блока и раскладного планера. Крылья планера имеют оси поворота, размещенные в поперечной плоскости по отношению к его продольной оси вблизи центра масс пустого летательного аппарата. В патенте предложено, чтобы на участках траектории выведения и входа в плотные слои атмосферы консоли крыла были сложены передними кромками в ниши вдоль корпуса с образованием стреловидного крыла малого удлинения, а в раскрытом положении, после прохода диапазона сверхзвуковых скоростей, эти консоли в развернутом положении образовали бы крыло большого удлинения. В таком варианте компоновки крылатого ракетного блока проблематичным является переход от конфигурации крыла малого удлинения на крыло большого удлинения, так как в конструкции блока не предусмотрены средства обеспечения приемлемой центровки на переходном участке полета. Попутно следует отметить, что у самолетов эта проблема обычно решается за счет перекачки топлива между разнесенными вдоль их продольной оси группами баков. Сравнительно малое плечо хвостового оперения в компоновке ускорителя по патенту RU 2053936 определяет сложности получения достаточно эффективной его конструкции - необходимость увеличить площадь влечет за собой, как правило, увеличение веса, то есть конструкция оказывается перетяжеленной.
Известен также многоразовый ускоритель первой ступени ракеты-носителя (см. патент RU 2148536 от 10.05.2000), состоящий из корпуса, образованного баками горючего и окислителя, носовым, межбаковым и хвостовым отсеком с ракетной установкой, и средств обеспечения моторного возвратного полета и посадки на аэродром космодрома. Прототипом для этого изобретения был патент US 4834324, но в отличие от прототипа в нем дополнение ракетного корпуса самолетными элементами произведено с лучшим соблюдением сложившихся в авиации канонов. Расположение в носовом отсеке воздушно-реактивных двигателей (ВРД) способствует сдвигу центра тяжести ближе к середине корпуса (по сравнению с компоновкой патента US 4834324, где вспомогательные ракетные двигатели расположены в том же отсеке, что и маршевые ЖРД) и позволяет обеспечить балансировку без дополнительного продольного смещения развернутого в рабочее положение крыла. Стационарная установка на многоразовом ускорителе хвостового оперения классического типа потенциально должна обеспечивать приемлемые характеристики по балансировке и управляемости объекта во всем рабочем диапазоне высот и скоростей полета. Но тогда ускоритель может крепиться ко второй ступени только со стороны нижней части своего корпуса, а это навязывает выбор компоновки крыла по схеме «высокоплан», которая, как правило, при сопоставимых условиях уступает по величине минимальной посадочной скорости схеме «низкоплан». Предложенный в патенте RU 2148536 вариант стационарного размещения ВРД в носовом отсеке сопряжен, по крайней мере, еще с двумя недостатками:
- повышенным лобовым сопротивлением корпуса на сверхзвуковых режимах полета из-за того, что носовая часть имеет форму, близкую к полусферической;
- пониженной величиной эффективной тяги ВРД (из-за существенного искривления входных и выходных газовых каналов двигателей).
Эти обстоятельства приводят к повышению потребных объемов как ракетного топлива на участке выведения, так и авиационного топлива для участка возвратного полета, что, в конечном счете, ведет к понижению доли веса выводимого в космос полезного груза.
В 2000 году в США была объявлена программа Space Launch Initiative (SLI, см., например, http://www.slinews.com, http://www.starbooster.com), одной из основных целей которой ставилось создание многоразовых ракетных ускорителей. Возможные варианты решения этой задачи отражены в патентах US 6450452 от 17.09.2002, US 6612522 от 02.09.2003 и US 6616092 от 09.09.2003. У большинства предложенных в этих патентах компоновочных решений характерной чертой является применение трапециевидных крыльев со стреловидностью по передней кромке порядка 45° (правда, в описании патента US 6612522 на самом деле приведены два варианта компоновок: один с трапециевидным крылом, а второй с прямым крылом умеренного удлинения). Поскольку параметры крыла этих ВРУ выбираются в значительной мере из условий обеспечения приемлемых посадочных характеристик (как правило, на посадочных скоростях порядка 250÷300 км/час), то такие крылья в компоновке ракетоносителя на этапе выведения на сверхзвуковых и гиперзвуковых скоростях полета ухудшают его аэродинамические характеристики. Повышенное аэродинамическое сопротивление ракетоносителя с крылатыми ВРУ таких компоновок на указанных режимах (по сравнению с бескрылыми одноразовыми ускорителями и вариантами компоновок из патентов US 4834324 и RU 2148536) приводит к увеличению доли ракетного топлива за счет уменьшения доли веса полезной нагрузки. То есть эффективность ракетоносителей с ВРУ рассматриваемых в этом абзаце компоновок, по-видимому, окажется ниже эффективности ракетоносителей, на которых для участка выведения будут предприняты меры по уменьшению негативного влияния крыла, например, за счет частичной его уборки путем поворота вдоль корпуса.
На улучшение аэродинамических характеристик многоразового ускорителя ракеты-носителя, как на этапе выведения, так и на этапе возвратного полета к аэродрому космодрома, ориентированы технические решения в патенте RU 2321526 от 10.04.2008. Отличительными особенностями компоновки по этому патенту являются складные консоли крыла, которые в стартовой конфигурации повернуты и прижаты к нижней поверхности центроплана. Очевидно, что такое решение позволяет на этапе выведения заметно уменьшить омываемую поверхность летательного аппарата и за счет этого понизить его аэродинамическое сопротивление. На повышение аэродинамического качества ориентированы также решения патента по применению заостренных передних кромок крыла и носового обтекателя (радиус затупления для них определен величиной 3÷5 мм). Оси вращения консолей сориентированы под определенными углами по отношению к продольной оси ускорителя, что при несимметричном их отклонении формирует одновременное управляющее воздействие по всем трем каналам. Этот отличительный признак проблематично однозначно отнести либо к достоинствам, либо к недостаткам предложенной конструкции. Применение же заостренных передних кромок позволяет снизить лобовое сопротивление на сверхзвуковых режимах полета, однако существенным ограничителем практического использования таких кромок, как известно, остается их термостойкость на длительных гиперзвуковых режимах полета. Кроме проблемы получения приемлемых характеристик по термостойкости элементов конструкции ускорителя для предложенного варианта компоновки сложно также на сравнительно небольшом размахе при малом удлинении крыла достичь требуемых величин несущих свойств на посадочном режиме, чтобы уложиться в рациональные допуски по посадочной скорости.
Общим же недостатком компоновок во всех вышерассмотренных патентах является обширная донная область за отсеком маршевой ракетной установки, «вклад» в лобовое сопротивление которой на дозвуковых режимах возвратного полета ускорителя может достигать 40% от аэродинамического сопротивления всего летательного аппарата. Определяемое этим фактором понижение аэродинамического качества сужает область достижимости аэродрома посадки, а также повышает уровень сложности выполнения самого посадочного режима. Кроме компоновки ускорителя по патенту US 4834324 из всех остальных вариантов компоновок ускорителей проблематично сформировать многоблочную пакетную конфигурацию ракетоносителя с числом блоков более трех, так как существенно выступающие за обводы корпуса ускорителя элементы несущих поверхностей (консоли крыла и/или оперение) препятствуют этому.
Учитывая все вышеизложенные обстоятельства, по совокупности наиболее близких отличительных признаков в качестве прототипа для объединенных в настоящей заявке на изобретение технических решений выбраны компоновочные решения патента US 4834324.
В заключение же настоящего раздела следует отметить, что результаты анализа современных патентов показали сохраняющуюся актуальность задачи повышения относительной доли веса выводимой в космос полезной нагрузки с помощью многоразовых ракетных систем. По сравнению с сопоставимыми одноразовыми системами у прототипа и аналогов эта доля понижена как раз из-за добавления в их конструкцию элементов, обеспечивающих многократность применения. Эти элементы в большинстве вариантов ранее предложенных технических решений вместе с неизбежным добавлением веса также ухудшают еще и аэродинамические характеристики ракетоносителя в целом, что ведет к повышению потребного объема ракетного топлива в ущерб весу полезной нагрузке. Таким образом, для совершенствования ракетно-космической техники нужны решения, сводящие к минимуму вышеуказанные негативные эффекты.
Раскрытие изобретения
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в улучшении аэродинамических характеристик МРАМ. Сформированная в настоящей заявке на изобретение совокупность технических решений, относящаяся к устройству, направлена на решение поставленной задачи за счет:
- Улучшения аэродинамических характеристик компоновки частично многоразового ракетоносителя пакетной схемы в целом - снижения его аэродинамического сопротивления и повышения несущих свойств;
- Улучшения аэродинамических характеристик МРАМ как в стартовой конфигурации, так и в конфигурации возвратного полета путем уменьшения аэродинамического сопротивления и повышения аэродинамического качества на его эксплуатационных режимах полета;
- Обеспечения условий формирования набора конфигураций ракет-носителей на базе унифицированных многоразовых модулей первой ступени с кратно различающейся суммарной мощностью маршевой силовой установки (то есть, первая ступень может состоять от одного до не менее чем из шести унифицированных ускорителей), что позволяет увеличить абсолютный вес выводимого на орбиту полезного груза в одном запуске.
В части способа возвращения МРАМ на космодром технический результат состоит в том, что для наиболее совершенного варианта его осуществления требуются минимальные весовые затраты в стартовой конфигурации ракетоносителя и за счет этого увеличивается доля выводимой в космос полезной нагрузки и повышается транспортная эффективность ракетной системы.
Для достижения указанного технического результата в предлагаемом многоразовом ракетно-авиационном модуле объединены ракетные и авиационные агрегаты. Корпус включает отсек маршевой ракетной установки, баки ракетного топлива, межбаковый отсек и концевой сужающийся отсек с размещенными в нем реактивными рулями и имеющий геометрическую форму, исключающую возникновение перед ним мощного отсоединенного скачка уплотнения. Крыло сделано поворотным с механизмами его перемещения и фиксации в положении вдоль оси корпуса на этапе выведения и в повернутом на 90° положении на этапе возвратного полета. Крыло имеет повышенную термостойкость наиболее интенсивно нагреваемых участков поверхности, а внутри его размещены баки авиационного топлива достаточного объема для выполнения перелета на заданное расстояние. Модуль оснащен органами аэродинамического управления движением по трем каналам, убираемым шасси трехопорного или велосипедного типа, причем опора, расположенная вблизи маршевой ракетной установки, выполнена усиленной и на корпусе имеются узлы сопряжения со второй ступенью ракеты-носителя. В отличие от прототипа и известных аналогов, на конце корпуса МРАМ около маршевой ракетной установки располагают подвижные термостойкие створки с механизмом для их перемещения. В открытом фиксированном положении на этапе выведения створки не мешают штатному функционированию маршевой ракетной установки, а в закрытом положении на этапе возвратного полета образуют головной обтекатель, закрывающий выступающие элементы маршевой ракетной установки (ракетные сопла). Аэродинамические рулевые поверхности хвостового оперения соединяют с механизмом их выдвижения, обеспечивающим перемещение этих поверхностей из убранного положения в концевом сужающемся отсеке на этапе выведения в заданное рабочее положение на этапе возвратного полета.
В компоновке МРАМ возможен вариант интеграции механизма перемещения термостойких створок обтекателя с силовой конструкцией маршевой ракетной установки. Такое решение может обеспечить улучшение компактности и снижение веса механизма.
Сужающийся отсек предпочтительно выполнить в форме переходного тела от цилиндра к клину, причем острая или незначительно затупленная термостойкая кромка клина параллельна строительной горизонтали модуля. Предложенная форма конца корпуса МРАМ при рациональном выборе углов сужения клина приемлема как в качестве носового обтекателя для диапазона сверхзвуковых скоростей, так и в качестве хвостового обтекателя для дозвуковых скоростей. Причем клинообразный отсек может иметь достаточный объем для размещения в нем убираемых на участке выведения поверхностей хвостового оперения и авиационных двигателей.
Часть поверхности сужающегося отсека корпуса выполнена в виде подвижных щитков, конструкция и механизм перемещения которых обеспечивают их функционирование в качестве балансировочных поверхностей и/или воздушного тормоза. Названные органы аэродинамического управления подтвердили свою эффективность и необходимость на первом поколении крылатых возвращаемых космических аппаратов.
Существенное улучшение аэродинамических характеристик МРАМ получается за счет того, что поворотное крыло выполняют складным, состоящим из центроплана и раскладываемых консолей, которые на этапе выведения компактно прижаты к центроплану, а на этапе возвратного полета перемещаются в рабочие положения. Поворотные консоли становятся еще одним органом аэродинамического управления, расширяющим арсенал средств решения задач механики полета во всем диапазоне скоростей полета модуля, в частности: при выборе угла атаки на режиме самобалансировки и управления по каналу крена на гиперзвуковых скоростях, обеспечении оптимальных характеристик устойчивости и управляемости на дозвуковых скоростях.
Установка в сужающемся отсеке, который на возвратном режиме полета является хвостовым, контейнера с тормозным посадочным парашютом предпочтительна по условиям ввода в действие этого парашюта. Максимальное раскрытие створок воздушного тормоза и выпуск парашюта после приземления позволяют существенно сократить дистанцию пробега.
Размещение в районе шарниров поворота консолей крыла основных реактивных рулей управления ориентацией МРАМ в канале крена позволяет повысить эффективность средств струйного управления в этом канале, так как плечо приложения управляющего момента становится существенно больше, чем у рулей, расположенных на корпусе.
Прочность узлов сопряжения МРАМ со второй ступенью обеспечивают достаточной для безопасной передачи на вторую ступень сосредоточенных нагрузки от двух радиально соединенных модулей. Реализация такого технического решения обеспечивает возможность формирования ракетоносителя пакетной схемы с повышенными несущими свойствами - два соответствующим образом параллельно соединенных модуля могут рассматриваться как крыло малого удлинения, и повышенной мощностью маршевой ракетной установки.
Вблизи центра тяжести МРАМ в корпусе или центроплане крыла располагают узлы сопряжения с одним или несколькими воздушно-реактивными двигателями с суммарной мощностью, достаточной для выполнения взлета с взлетно-посадочной полосы заданного класса. Такое техническое решение позволяет быстро преобразовывать МРАМ из планера в самолет и наоборот. При запуске ракетоносителя нужно иметь на борту спасаемых модулей минимально необходимый набор авиационных средств, требуемых для безопасного возвращения на поверхность Земли. Если имеется возможность выполнения планерной посадки, то тогда двигатели не являются обязательными. Но после посадки модуля на промежуточном аэродроме и выполнения соответствующего технического обслуживания, включающего оснащение его авиационной силовой установкой, может быть выполнен самолетный перелет модуля на аэродром космодрома.
В сужающемся отсеке может быть установлен механизм выдвижения из закрытых на этапе выведения ниш одного или нескольких воздушно-реактивных двигателей в рабочее положение на заданной скорости возвратного полета. Если траектории полета модулей первой ступени ракетоносителя будут проходить над поверхностью, например над акваторией океана, где нет возможности произвести планерную посадку, то тогда их нужно оснащать средствами, обеспечивающими достижение ближайшего подходящего аэродрома. Установка авиационных двигателей для обеспечения возвратного полета модуля на противоположном конце его корпуса от маршевых ракетных двигателей предпочтительна по многим компоновочным критериям. Но если не упрятать эти ВРД внутрь корпуса модуля в стартовой конфигурации, то они будут существенно ухудшать аэродинамику ракетоносителя на этапе выведения. Применение выдвижных ВРД обеспечивает условия формирования типичной самолетной компоновки хвостовой части с двигателями на пилонах.
Для получения названного технического результата в предлагаемом способе возвращения на космодром МРАМ, имеющего одну из заявляемых компоновок, в известную последовательность операций включены дополнительные операции. Условно возвращение начинается с момента отделение модуля от второй ступени ракетоносителя на участке выведения при скорости М≈6÷8 и выключения его маршевой ракетной установки. После подъема модуля на высоту, близкую к динамическому потолку, и уменьшении скоростного напора ниже заданной величины выполняют поворот крыла в плоскости строительной горизонтали из фиксированного стартового положения вдоль корпуса в фиксированное рабочее положение перпендикулярно корпусу. Далее, до режима входа в плотные слои атмосферы, совершают с помощью реактивных рулей разворот модуля на заданный угол тангажа и производят выдерживание заданной угловой ориентации модуля в пространстве. Затем по мере снижения модуля изменяют ориентацию по выбранному закону с использованием, в зависимости от скорости полета, реактивных и/или аэродинамических органов управления, формируя, с учетом заданных ограничений на параметры движения, траектории планирования, приводящие на выбранный достижимый аэродром посадки. В отличие от прототипа, дополнительно на участке полета после выключения маршевой ракетной установки, но до возвращения модуля в плотные слои атмосферы, производят перемещение термостойких створок из открытого положения в закрытое, образуя головной обтекатель, выдвигают рулевые поверхности хвостового оперения из сужающегося отсека в рабочее положение, а также разворачивают модуль в канале тангажа на заданный угол в диапазоне 120°÷150°. Для этого маневра более точно подходит определение как «переворот модуля в положение отсеком маршевой ракетной установки вперед». Если крыло выполнено складным, то консоли крыла раскрывают на заданный угол, обеспечивающий режим самобалансировки модуля на выбранном угле атаки, а затем по заданной программе в зависимости от параметров полета консоли поворачивают в выбранную маршрутную конфигурацию. После посадки модуля на промежуточном аэродроме там производят либо установку на нем авиационной силовой установки, заправку топливом и типичный самолетный перелет модуля на аэродром космодрома, либо уборку выдвинутых аэродинамических поверхностей и шасси в исходное состояние с последующей транспортировкой модуля в компактной конфигурации наземным (речным) транспортом на космодром.
МРАМ может быть оснащен авиационной силовой установкой для осуществления немедленного возвратного полета на аэродром космодрома после завершения участка выведения. Тогда в новую совокупность операций способа добавляется операция выдвижения этой силовой установки в рабочее положение на заданной дозвуковой скорости и ее запуск, а операции, соответствующие посадке на промежуточном аэродроме, исключаются.
Ключевым новым решением в обеспечении получения перечисленных результатов является решение по изменению на верхнем участке траектории полета многоразового модуля общей ориентации его продольной оси относительно вектора скорости на противоположное. Другими словами, если на этапе выведения отсек с маршевой ракетной установкой всегда располагается в хвостовой части ракетоносителя, то на этапе возвращения многоразового модуля этот отсек должен оказаться головным. Такое техническое решение открывает возможность взаимного согласования противоречивых требований к аэродинамическим свойствам концов корпуса многоразового модуля на этапах выведения и возвращения. Если противоположному от отсека маршевой ракетной установки концу корпуса модуля придать соответствующую форму (например, клинообразную, пикообразную или конусообразную - общая характеристика - «сужающаяся»), то это позволит устранить условия возникновения головной ударной волны на этапе выведения и исключит донную область на этапе возвращения. А ставшему на этапе возвращения передовым отсеку маршевой ракетной установки необходимо придать плавные обводы, закрыв сопла двигателя (разумеется, через определенный промежуток времени после его выключения) термоустойчивыми (жаропрочными) створками, образующими характерную форму головного обтекателя.
Отличительными признаками компоновки предложенного модуля являются:
a). Термостойкие (жаропрочные) защитные створки маршевой ракетной установки в «стартовой» конфигурации смещены и компактно прижаты к корпусу МРАМ так, что не мешают нормальному функционированию ракетных двигателей, а в «авиационной» конфигурации закрывают сопла (сопло), образуя головной обтекатель заданной формы, оптимизированный для типовых режимов полета МРАМ.
b). Прямое поворотное крыло, состоящее из центроплана с термоустойчивой верхней поверхностью и двух раскладываемых консолей, имеет следующие характерные конфигурации:
- «стартовую» - крыло зафиксировано вдоль корпуса МРАМ верхней поверхностью центроплана в сторону корпуса, консоли сложены и прижаты к центроплану, стойки шасси убраны в ниши центроплана и закрыты створками;
- «гиперзвуковую» - центроплан крыла повернут и зафиксирован перпендикулярно корпусу МРАМ передней кромкой ближе к маршевой ракетной установке, консоли раскрыты на угол, который «в среднем» соответствует режиму самобалансировки МРАМ на заданном угле атаки, сопла реактивной системы управления креном, расположенные в районе шарнирного сопряжения консолей крыла с центропланом, открыты;
- «маршрутную» - эта конфигурация получается из «гиперзвуковой» за счет увеличения угла раскладки консолей до заданной величины, выбранной для полета МРАМ на крейсерском угле атаки;
- «посадочную» - получающуюся из «маршрутной» конфигурации при выпуске посадочной механизации задней кромки крыла и стоек шасси.
c). Выдвижные рулевые аэродинамические поверхности в «стартовой» конфигурации либо полностью убраны в сужающийся отсек, либо компактно прижаты к нему.
d). Отсек на противоположном от маршевой ракетной установки конце корпуса МРАМ имеет острую (или незначительно затупленную) термостойкую переднюю кромку. Углы сужения образующих этого отсека (в пределах примерно 15°) и его форма в целом определены так, чтобы на режиме выведения исключить условия существования мощного отсоединенного скачка уплотнения перед ним, а на режиме планирования с дозвуковой скоростью за ним не было бы существенных отрывных зон.
e). Если на МРАМ используется один или несколько выдвижных ВРД, то в «стартовой» конфигурации они убраны внутрь сужающегося отсека, а в «авиационной» конфигурации выдвинуты во внешний поток. Если же МРАМ спроектирован под использование съемных двигателей, то в «стартовой» конфигурации они отсутствуют, но потом их могут установить в районе центра тяжести модуля при наземном обслуживании на промежуточном аэродроме.
Нетрудно заметить, что в варианте компоновки ракетоносителя МТКС с предлагаемым МРАМ существенные отличия от компоновки одноразового ракетоносителя пакетной схемы имеются, главным образом, только в следующих трех позициях:
- У каждого ракетного модуля первой ступени вдоль корпуса появилась надстройка в виде сложенного крыла;
- Носовые части корпусов боковых модулей первой ступени могут иметь обводы, отличные от осесимметричной формы;
- В хвостовой части около маршевой ракетной установки появились «надстройки» в виде открытых защитных створок.
В заявляемом изобретении совокупность отличительных признаков сформирована таким образом, чтобы дополненную компактно сложенным крылом конфигурацию ракетного ускорителя нового облика можно было с минимальными издержками преобразовать в обычную самолетную конфигурацию.
Отличительными признаками предложенного способа возвращения модуля на космодром являются:
f) Операция закрытия выступающих элементов маршевой ракетной силовой установки термостойкими створками, образующими в закрытом положении головной обтекатель.
g) Операция выдвижения аэродинамических поверхностей хвостового оперения в рабочее положение до входа в плотные слои атмосферы.
h) Переворот модуля так, чтобы отсек с маршевой ракетной установкой оказался на этапе возвратного полета носовым.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
на фиг.1 - изометрическая проекция МРАМ в «стартовой» конфигурации со стороны сужающегося отсека;
на фиг.2 та же стартовая конфигурация МРАМ показана со стороны отсека маршевой ракетной установки;
на фиг.3 показан модуль в положении входа в плотные слои атмосферы с крылом, имеющим «гиперзвуковую» конфигурацию;
на фиг.4 представлен вариант компоновки МРАМ, ориентированный на полет с умеренными сверхзвуковыми и дозвуковыми скоростями (крыло в «маршрутной» конфигурации);
на фиг.5 приведена компоновка МРАМ с выдвинутыми ВРД для выполнения немедленного возвратного полета на аэродром космодрома;
на фиг.6 компоновка с фиг.4 дополнена съемными ВРД, навешиваемыми в районе центра тяжести на корпус МРАМ для обеспечения маршрутного перелета с промежуточного аэродрома на аэродром космодрома;
на фиг.7 изображен вариант компоновки ракетоносителя пакетной схемы, приближающейся к типу «несущий корпус»;
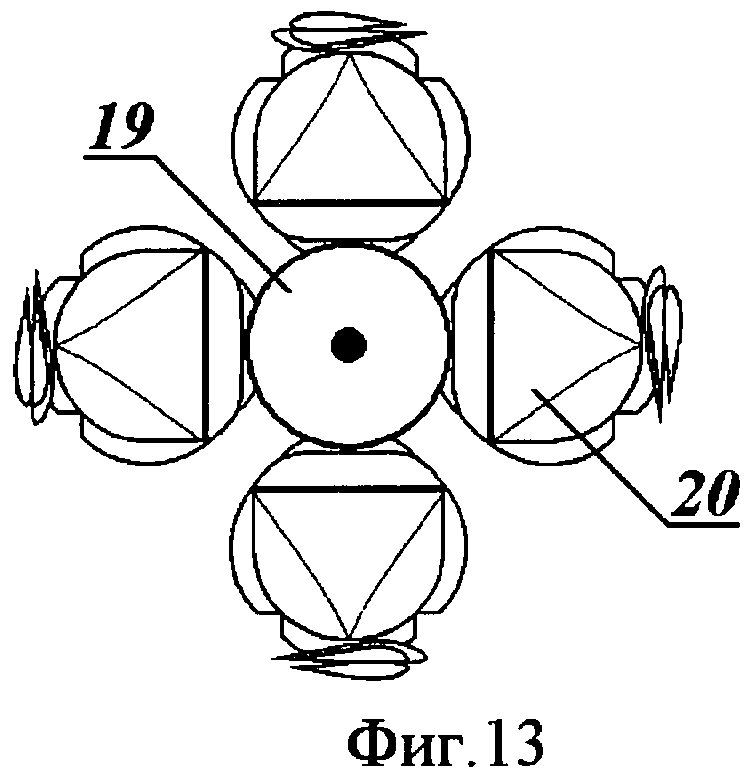
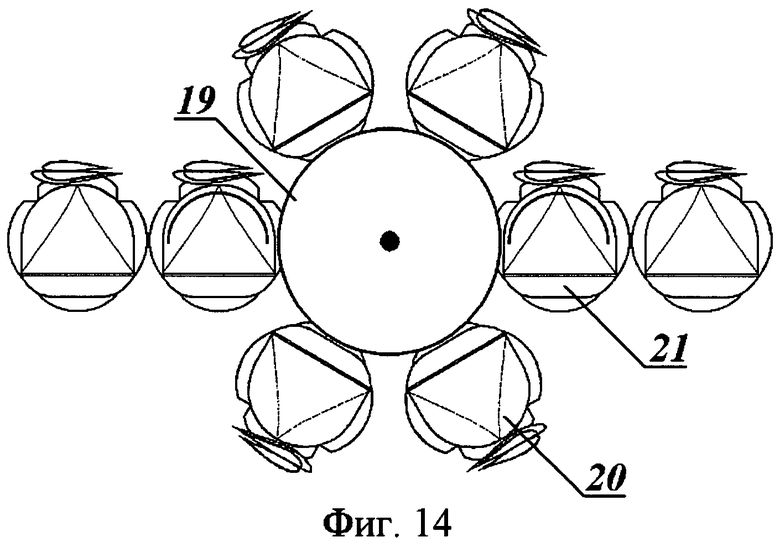
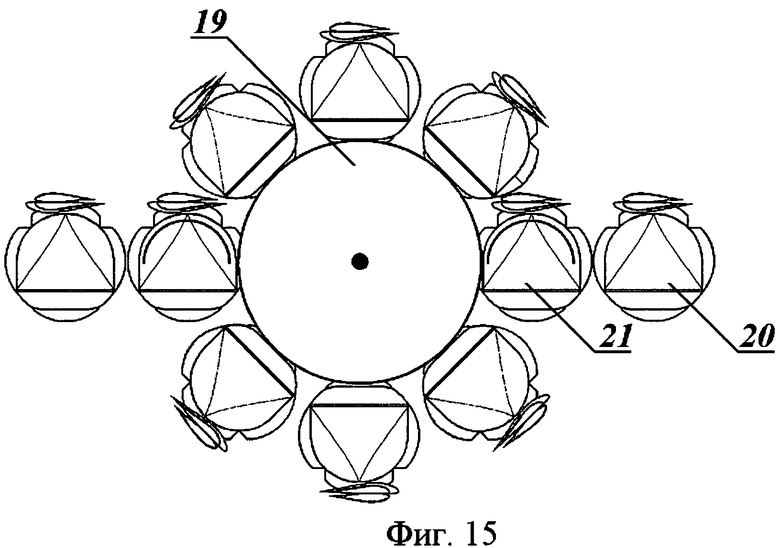
на фиг.8-16 показаны возможные схемы формирования на базе унифицированных МРАМ ряда ракетоносителей с различной суммарной мощностью ракетной установки и с повышенными несущими свойствами пакетных корпусов.
На фигурах 1-16 применены следующие обозначения:
1 - корпус МРАМ;
2 - сопло маршевой ракетной установки;
3 - подвижная защитная створка обтекателя маршевой ракетной установки;
4 - подвижный центральный упор-фиксатор защитных створок;
5 - верхний щиток воздушного тормоза;
6 - защитная створка ниши ВРД;
7 - подвижная рулевая поверхность хвостового оперения;
8 - центроплан крыла;
9 - раскладываемая консоль крыла;
10 - флаперон;
11 - сопло реактивной системы основного канала управления по крену;
12 - сопло реактивной системы управления по курсу;
13 - верхние сопла реактивной системы управления по тангажу/крену;
14 - выдвижной воздушно-реактивный двигатель;
15 - съемный воздушно-реактивный двигатель;
16 - защитная створка ниши хвостового оперения - нижний щиток воздушного тормоза;
17 - сужающийся отсек;
18 - корпус второй ступени ракетоносителя;
19 - условное обозначение второй ступени;
20 - условное обозначение МРАМ с указанием ориентации кромки сужающегося отсека;
21 - условное обозначение МРАМ с усиленными узлами сопряжения со второй ступенью;
22 - контейнер посадочного тормозного парашюта;
23 - нижние сопла реактивной системы управления по тангажу/крену;
24 - закрылок.
Осуществление изобретений.
Предлагаемый многоразовый ракетно-авиационный модуль МРАМ содержит (см. фиг.1, 2) корпус 1, включающий отсек маршевой ракетной установки, баки ракетного топлива, межбаковый отсек и концевой сужающийся отсек 17, имеющий геометрическую форму, исключающую возникновение перед ним мощного отсоединенного скачка уплотнения. На клинообразном конце 17 корпуса 1 расположены сопла реактивной системы управления - 12 для канала курса, пары 13 и 23 для каналов тангажа и крена. Поворотное крыло 8 с механизмами его перемещения и фиксации в положении вдоль оси корпуса на этапе выведения и в повернутом на 90° положении на этапе возвратного полета имеет повышенную термостойкость наиболее интенсивно нагреваемых участков поверхности и внутренние баки авиационного топлива достаточного объема для выполнения перелета на заданное расстояние. Сопла основных реактивных рулей системы управления по крену 11 размещены в районе шарниров поворота консолей 9 крыла. Органы аэродинамического управления движением модуля по трем каналам содержат подвижные рулевые поверхности хвостового оперения 7 и флапероны 10. Шасси выполнено трехопорным или велосипедным, убираемым, с усиленной опорой около отсека маршевой ракетной установки. Установлены узлы сопряжения корпуса МРАМ со второй ступенью ракеты-носителя (не показаны). Около маршевой ракетной установки располагают подвижные термостойкие створки 3 с механизмом для их перемещения. Они выполнены с возможностью в открытом фиксированном положении на этапе выведения не мешать штатному функционированию маршевой ракетной установки (см. фиг.1, 2), а в закрытом положении на этапе возвратного полета с возможностью образования вокруг выступающих элементов маршевой ракетной установки обтекателя (см. фиг.3, 4, 5). Управляемые аэродинамические поверхности хвостового оперения 7 соединяют с механизмом их выдвижения, обеспечивающим перемещение этих поверхностей из убранного в сужающийся отсек 17 положения на этапе выведения в заданное рабочее положение на этапе возвратного полета (см. фиг.3, 4, 5).
Механизм перемещения термостойких створок может быть соединен с силовой конструкцией маршевой ракетной установки.
Сужающийся отсек 17 выполнен в форме переходного тела от цилиндра к клину, причем острая (или незначительно затупленная) термостойкая кромка клина параллельна строительной горизонтали модуля.
На отсеке 17 корпуса установлены подвижные верхний и нижний щитки 5, 16, конструкция и механизм перемещения которых обеспечивают их функционирование в качестве балансировочных поверхностей и/или воздушного тормоза (см. фиг.3).
Поворотное крыло выполняют составным, состоящим из центроплана 8 и раскладываемых консолей 9, которые на этапе выведения компактно прижаты к центроплану 8 (см. фиг.1, 2), а на этапе возвратного полета перемещаются в положения, определяемые выбранным законом управления движением (см. фиг.3, 4, 5).
В сужающемся отсеке 17 устанавливают контейнер 22 с тормозным посадочным парашютом.
В районе шарниров поворота консолей 9 крыла размещают основные реактивные рули 11 управления ориентацией модуля в канале крена (см. фиг.3).
Узлы сопряжения (не показаны) МРАМ со второй ступенью ракетоносителя выполнены усиленными и обеспечивают безопасную передачу нагрузки на вторую ступень от двух радиально соединенных модулей первой ступени.
Вблизи центра тяжести МРАМ в корпусе 1 или центроплане крыла 8 располагают узлы сопряжения с одним или несколькими воздушно-реактивными двигателями 15 (см. фиг.6) с суммарной мощностью, достаточной для выполнения взлета с взлетно-посадочной полосы заданного класса.
В сужающемся отсеке устанавливают механизм выдвижения одного или нескольких воздушно-реактивных двигателей 14 из ниш, закрытых на этапе выведения створками 6, в рабочее положение на заданной скорости возвратного полета (см. фиг.5).
На фиг.1 и фиг.2 защитные створки 3 показаны в открытом положении, они сдвинуты от ракетных сопел 2 так, что не препятствуют истечению продуктов горения из ЖРД и повороту сопел в кардановом подвесе при управлении вектором тяги. Центроплан крыла 8 зафиксирован вдоль корпуса 1, консоли крыла 9 зафиксированы в сложенном положении на центроплане. Аэродинамические поверхности хвостового оперения (не показаны) упрятаны в сужающемся отсеке 17 под нижней створкой 16 воздушного тормоза. Эта створка прикрывает также контейнер 22 с тормозным парашютом. На клинообразном конце корпуса расположены сопла струйной системы управления - 12 для канала курса, пары 13 и 23 для каналов тангажа и крена.
На фиг.3 изображен МРАМ в конфигурации входа в плотные слои атмосферы на гиперзвуковой скорости с углом атаки порядка 40° и углом крена 180°. Створки 3 показаны в закрытом положении. В центре они замкнуты на выдвинутый из свободного пространства между соплами упор-фиксатор 4. Центроплан крыла 8 повернут в рабочее положение перпендикулярно корпусу 1, консоли 9 повернуты примерно на 135° относительно исходного положения в «стартовой» конфигурации. Поверхности хвостового оперения 7 выдвинуты в рабочее положение, щитки воздушного тормоза 5 и 16, которые на данном режиме выполняют функцию балансировочных щитков, отклонены на заданные законом управления углы. Следует отметить, что применительно к предложенной компоновке МРАМ задача обеспечения балансировки на заданном угле атаки может решаться за счет комплексного использования следующих управляемых поверхностей: хвостового оперения 7, балансировочного щитка 5 и раскладываемых консолей 9.
На фиг.4 показан МРАМ в конфигурации, характерной для режима полета на дозвуковой и умеренной сверхзвуковой скорости, когда участок траектории с интенсивным аэродинамическим нагревом пройден. По мере уменьшения скорости полета и восстановления эффективности флаперона 10 в качестве управляющего органа в канале крена, консоли 9 крыла поворачивают в положение, при котором обеспечиваются наилучшие характеристики по несущим свойствам, устойчивости и управляемости МРАМ. Для варианта компоновки МРАМ без использования выдвижных ВРД такая конфигурация сохраняется до посадочного режима, на котором закрылок 24 отклоняют на соответствующий угол и выпускают шасси.
Изображенная на фиг.5 конфигурация МРАМ соответствует варианту компоновки с выдвижными ВРД 14. До момента выдвижения эти двигатели убраны в сужающийся отсек 17 и закрыты подвижными створками 6. После запуска двигателей 14 в заданных условиях для МРАМ обеспечивается возможность осуществления возвратного моторного полета на аэродром космодрома.
На фиг.6 показан МРАМ в конфигурации с навешенными на пилонах съемными ВРД 15, которые предназначены для выполнения перелета с промежуточного аэродрома, где этот летательный аппарат совершил планерную посадку, на аэродром космодрома. Следует отметить, что потребная мощность двигателей 15 в общем случае больше потребной мощности двигателей 14.
На фиг.7 изображен один из возможных вариантов компоновки ракетоносителя пакетной схемы, характеризующийся максимальным использованием эффекта «несущего корпуса». Два унифицированных модуля в стартовой конфигурации (см. фиг.1) соединены со второй ступенью 18 в ее диаметральной плоскости так, что клинообразные части сужающихся отсеков 17 образуют подобие передней кромки крыла малого удлинения. По сравнению с существующими одноразовыми космическими ракетами такая компоновка ракетоносителя открывает возможность более рационального использования его несущих свойств на атмосферном участке траектории выведения для увеличения массы выводимой в космос полезной нагрузки.
На фиг.8-15 представлены различные возможные варианты компоновок ракетоносителей пакетной схемы на базе унифицированных модулей первой ступени 20 и 21. Повышение прочности узлов сопряжения на модуле 21 открывает дополнительные возможности по формированию многоблочных ракетоносителей с улучшенными несущими свойствами.
Предложенный в настоящей заявке на изобретение вариант применения защитных створок 3 вокруг сопел 2 (отличительный признак а) является одним из ключевых элементов эффективного преобразования ракетного ускорителя в самолет. В ракетной технике известны (и применяются) режимы полета «соплом вперед», в частности, при осуществлении способа ракетодинамической посадки. Применительно к МТКС соответствующие способы и устройства описаны, например, в патентах RU 2309089 от 27.10.2007, RU 2318704 от 10.03.2008. Но при использовании такого способа, очевидно, что закрывать сопло обтекателем совершенно недопустимо. Включение же в совокупность отличительных признаков предлагаемой компоновки МРАМ подвижных конструктивных элементов специальной формы - защитных створок ракетной установки, образующих в закрытом состоянии обтекатель, - позволяет получить удовлетворительное решение по аэротермодинамическим характеристикам носовой части летательного аппарата на режимах гиперзвукового планирования и дозвукового полета к аэродрому. На этапе выведения прилегающие к корпусу 1 основания открытых створок 3, скорее всего, окажутся в низкоскоростном пограничном слое корпуса, а выступающие сферические сегменты создадут меньшее сопротивление внешнему потоку, чем типичный для хвостовых частей ракет цилиндрический уступ. Хотя доля вклада типичной хвостовой части ракетного блока в общее его сопротивление, как правило, существенно меньше доли вклада его носовой части, тем не менее, получающееся улучшение способствует достижению желаемого технического результата.
По-видимому, наиболее простым вариантом обеспечения требуемых перемещений защитных створок - сегментов обтекателя маршевой ракетной установки является применение четырехшарнирного механизма. Если у ракетной силовой установки МРАМ имеется несколько сопел, то в центре между ними целесообразно расположить подвижный фиксатор 4, на который будут замыкаться створки 3 в закрытом положении. Учитывая место расположения и физические условия функционирования (мощные тепловые потоки, сильные вибрации), может оказаться целесообразной интеграция механизма перемещения створок с силовой конструкцией маршевой ракетной установки.
Основа отличительного признака b настоящей заявки - применение прямого поворотного крыла - совпадает с одним из ключевых отличительных признаков прототипа. Но чтобы расширить арсенал настраиваемых параметров компоновки, улучшающих ее характеристики именно на типовых режимах полета МРАМ, предложено использовать крыло с раскладываемыми консолями (см. позицию 9 на фиг.1, фиг.3 и фиг.4) с определенными отличиями от известных аналогов. Найденное комплексное решение позволяет получить следующие достоинства и преимущества:
- повысить компактность крыла в сложенном состоянии;
- обрести средство коррекции (в определенных пределах) угла атаки на режиме самобалансировки МРАМ на участке его планирования с гиперзвуковой скоростью;
- получить удобные места в районе шарниров консолей крыла для размещения реактивных рулей управления 11 в канале крена (2) в «гиперзвуковой» конфигурации (см. фиг.3);
- получить эффективное средство аэродинамического управления креном (за счет разницы в углах раскладки консолей 9) при больших углах атаки и высокой сверхзвуковой скорости полета, когда фрапероны 10 малоэффективны;
- уменьшить относительную долю поверхности крыла, подверженную интенсивному аэродинамическому нагреву (только центроплан 8) и поэтому нуждающуюся в специальных защитных мерах;
- повысить несущие свойства крыла в «маршрутной» (см. фиг.4) и «посадочной» конфигурациях (за счет увеличения размаха крыла и его относительного удлинения);
- обрести средство коррекции характеристик устойчивости и управляемости в боковом канале за счет рационального выбора угла раскладки консолей 9.
Понятно, что наиболее крупной «платой» за получение совокупности перечисленных преимуществ является необходимость установки силовых приводов достаточной мощности для обеспечения раскладки консолей крыла в полете.
Раскладываемые консоли крыльев нашли широкое применение в палубной авиации (для повышения компактности базирующихся на авианосцах самолетов), а также планировались к применению и применялись на некоторых крылатых космических аппаратах, в частности на аппаратах серии «Бор-4» («Космос-1374», «Космос-1445», «Космос-1517», «Космос-1614»). Основное отличие предложенного в заявке варианта применения консолей от известных аналогов состоит в существенном увеличении суммарного угла их поворота (примерно на 180°) при раскладке из исходного положения в «стартовой» конфигурации до конечного положения в «маршрутной» и «посадочной» конфигурациях.
Важной отличительной особенностью компоновки МРАМ является то, что в ней крыло расположено по схеме «низкоплан» (см. фиг.4). Для этой схемы, как известно, характерно ощутимое проявление влияния экранного эффекта земли на взлетно-посадочных режимах, приводящее, в частности, к понижению посадочной скорости.
Из существующих схем шасси для применения на МРАМ наиболее предпочтительными являются либо типичная для многих современных самолетов трехопорная схема с передней опорой, либо велосипедная схема. Вследствие особенностей распределения масс вдоль продольной оси корпуса, передняя опора (расположенная вблизи тяжелой ракетной установки) должна иметь соответствующее относительное усиление. Поскольку в вышеуказанных предпочтительных схемах передние колеса не могут быть задействованы изолировано в основной системе торможения, то для получения требуемых величин дистанции пробега (особенно в случае выбора велосипедной схемы шасси) целесообразно применение комплексного режима с использованием после момента приземления тормозного парашюта. Контейнер 22 с этим парашютом можно разместить под одним из щитков воздушного тормоза (см. фиг.1). Далее, при размещении стоек шасси в крыле (основных в варианте трехопорной схемы или подкрыльных в варианте велосипедной схемы) получаются (по сравнению с прототипом) следующие преимущества:
- можно существенно увеличить колею шасси и за счет этого улучшить характеристики МРАМ на взлетно-посадочных режимах;
- понижается аэродинамическое сопротивление корпуса МРАМ за счет исключения надстроек в виде конформных гондол для шасси.
Таким образом, в сформированном варианте компоновки крыла предложено использовать большее число отработанных в авиации технических решений, улучшающих характеристики МРАМ, чем у прототипа и известных аналогов.
Установка органов продольного и путевого управления 7, а также щитков воздушного тормоза 5, 16, на противоположном от маршевой ракетной установки конце корпуса МРАМ позволяет получить существенно большее плечо приложения управляющего воздействия относительно центра тяжести, чем у прототипа и большинства аналогов. Тогда при обеспечении требуемой эффективности управления можно существенно уменьшить площадь и размеры аэродинамических рулей. Улучшенная компактность рулевых поверхностей позволяет упрятать их внутрь корпуса МРАМ на тех участках полета, где нет необходимости их применения (отличительный признак с), в частности на участке выведения. Совмещение функции защитной створки 16 хвостового оперения с функцией щитка воздушного тормоза позволяет получить определенную экономию в весе конструкции. На гиперзвуковом участке траектории спуска щиток 5 воздушного тормоза может выполнять также функцию балансировочного щитка. Контейнер с тормозным парашютом 22 предпочтительнее расположить под створкой 16.
Складываемые снаружи корпуса рули применяются на значительном числе современных авиационных и морских ракет, но на МРАМ предпочтительнее рули убрать в корпус 1. Это, во-первых, позволяет понизить аэродинамическое сопротивление, а, во-вторых, устраняет условия существенного нагрева тонких кромок оперения на гиперзвуковом режиме полета на участке выведения. Дополнительно к улучшению аэротермодинамических характеристик значимость отличительного признака с в компоновке конструкции МРАМ определяется еще и тем, что:
- обеспечивается возможность формирования многоблочных пакетных ракетоносителей (с числом боковых модулей существенно больше двух, см. фиг.10÷15);
- снижается вес рулевых поверхностей;
- понижается потребная мощность силовых приводов рулевых поверхностей.
Из нескольких возможных типов хвостового оперения наиболее предпочтительным (по критерию компактности) для применения на МРАМ является, по-видимому, V-образный тип с обычными или решетчатыми рулями, хотя нельзя исключать и других вариантов.
Как уже ранее отмечалось, основное свойство, которое должна обрести компоновка (геометрическая форма) МРАМ с внедрением отличительного признака d, - это уменьшение лобового аэродинамического сопротивления, как на этапе выведения, так и на этапе возвращения. По результатам аэродинамических исследований определено, что лобовое сопротивление тела вращения большого удлинения с полусферической носовой частью превышает сопротивление у такого же тела с оживальной носовой частью на М=0.95 примерно в три раза, а на М=4 - примерно в пять раз. Из ряда характерных форм с малым аэродинамическим сопротивлением на сверхзвуковых скоростях - конусообразной, пикообразной и клинообразной - именно за счет применения последней из них на МРАМ можно получить некоторые преимущества (по сравнению с традиционными слегка затупленными конусообразной или оживальной формами), в частности:
- наибольший прирост несущих свойств корпуса (при определенной его ориентации относительно вектора скорости);
- наиболее подходящую конфигурацию доступного пространства для уборки внутрь отсека аэродинамических органов управления 7 (см. также признак с);
- удобство компоновки двухдвигательной выдвижной силовой установки (если она применяется для выполнения незамедлительного возвратного полета МРАМ на аэродром космодрома).
В отличие от широко используемых затупленных осесимметричных носовых частей современных космических ракет, для клинообразной передней кромки более существенное значение приобретает опасность ее перегрева на гиперзвуковой скорости при увеличении длительности участка полета ракетоносителя в плотных слоях атмосферы. Поэтому конструкция такой кромки должна обладать повышенной термостойкостью, которая может быть обеспечена за счет изготовления ее из жаропрочного материала и/или за счет активного охлаждения (например, путем прокачки через полую кромку части окислителя из верхнего бака). Попутно следует отметить, что и характеристики головной части центрального блока целесообразно в части аэротермодинамических характеристик сбалансировать с характеристиками сужающегося отсека. То есть, по коэффициенту лобового сопротивления и термостойкости головной обтекатель над второй ступенью не должен быть заметно хуже, чем у МРАМ. Если же для ракетоносителя с МРАМ выбран традиционный закон управления траекторией выведения, то на таком классе траекторий нагрев головных частей менее значителен и допустимо ничего существенно нового не вносить в конструкцию их теплозащиты.
На этапе авиационных режимов полета МРАМ клинообразный сужающийся отсек 17 оказывается кормовым и при сложенных щитках воздушного тормоза по конфигурации очень близким к внешним обводам типичных хвостовых частей рамповых самолетов (типа Ан-28, Ан-22 и др.). Как известно, на таких формах удается обеспечить на крейсерских дозвуковых режимах приемлемые характеристики безотрывного обтекания и, следовательно, приемлемые характеристики по аэродинамическому сопротивлению.
Если значительная часть траектории выведения ракетоносителя располагается над сушей и вдоль этой трассы имеются подходящие аэродромы с достаточно длинными и широкими ВПП, то целесообразно на МРАМ в «стартовой» конфигурации не ставить ВРД, а посадку производить по способу, реализованному на воздушно-космических аппаратах первого поколения («Space Shuttle» и «Буран»). За счет высвободившегося ресурса по весу можно увеличить вес выводимой в космос полезной нагрузки.
Одним из возможных вариантов возврата МРАМ на космодром может быть его самостоятельный перелет «по-самолетному» с аэродрома посадки на аэродром космодрома в автоматическом или дистанционном режиме управления. Для обеспечения этого варианта перелета целесообразно пару ВРД соответствующей мощности (см. фиг.6, позиция 15) закрепить на пилонах в районе центра тяжести МРАМ (на корпусе или на центроплане), но так, чтобы не нарушить исходную балансировку. Для размещения авиационного топлива наиболее предпочтительным вариантом является использование свободных объемов в центроплане крыла.
Если же запуск ракетоносителя будет осуществляться в таких условиях, что вдоль трассы его выведения не будет подходящих аэродромов для посадки МРАМ (например, на морской акватории), то тогда целесообразным вариантом спасения первой ступени становится их немедленный возвратный полет на аэродром космодрома с использованием имеющихся на борту выдвижных ВРД 14. То есть, по последовательности основных операций должна реализовываться схема полета аналога по патенту RU 2148536. Но в соответствии с отличительным признаком е настоящей заявки на изобретение, ВРД в «стартовой» конфигурации МРАМ предложено полностью упрятать в сужающийся отсек. По сравнению с аналогами такое решение может обеспечить следующие преимущества:
- Меньшее аэродинамическое сопротивление корпуса модуля в «стартовой» конфигурации на участке выведения.
- Предотвращение вакуумирования ВРД в верхних слоях атмосферы (если обеспечена герметичность закрытия ниши двигателя).
- Улучшение аэродинамических условий функционирования ВРД 14 в «авиационной» конфигурации, обеспечивающей минимальные потери эффективной тяги.
Первое из перечисленных преимуществ получается за счет исключения донных областей, имеющихся на прототипе вблизи выступающих сопел. Второе преимущество связано с тем, что пока не известны прецеденты (по крайней мере, автору) успешных запусков обычных авиационных ВРД после их пребывания в вакууме. Поэтому может оказаться более эффективным обеспечить герметичность ниши ВРД на этапе выведения, чем производить требуемую доработку конструкции авиационного двигателя. Третье преимущество определяется тем, что после выдвижения ВРД он оказывается в компоновке типичной самолетной дозвуковой хвостовой части, которая широко применяется на многих современных реактивных деловых и региональных самолетах. В этой компоновке (типа «изолированный двигатель на пилоне») обеспечиваются практически оптимальные внешние условия для эффективного функционирования ВРД. Неизбежной «платой» за получение перечисленных достоинств является некоторое усложнение конструкции за счет механизма выдвижения ВРД в полете. Однако, учитывая современный достаточно высокий уровень совершенства исполнительных механизмов, можно утверждать, что интегрально выигрыш от внедрения соответствующего механизма окажется выше, чем издержки.
Способ возвращения МРАМ на космодром осуществляют следующим образом.
При старте ракетоносителя включают маршевую ракетную установку МРАМ, который в стартовой конфигурации (см. фиг.1) в составе первой ступени ракетоносителя (см. фиг.7) функционирует в соответствии с программой выведения.
На участке выведения при заданной скорости (число М≈6÷8) отделяют МРАМ от второй ступени (поз.18 на фиг.7) и выключают его маршевую ракетную установку, после чего он продолжает полет по баллистической траектории.
При уменьшении скоростного напора ниже заданного значения производят перемещение защитных створок маршевой ракетной установки 3 из открытого состояния (см. фиг.1) в закрытое состояние (в конфигурацию обтекателя, см. фиг.3). Открытие щитков воздушного тормоза (поз.5, 16 на фиг.1 и фиг.2) на противоположном от маршевой ракетной установки конце корпуса может облегчить переворот МРАМ относительно его поперечной оси на угол в диапазоне 120°÷150°.
Осуществляют переворота МРАМ с помощью реактивной системы управления (поз.23 на фиг.1 и поз.13 на фиг.2) в положение «отсеком маршевой ракетной установки вперед».
Выполняют при минимальном скоростном напоре поворот крыла 8 из «стартовой» конфигурации вдоль корпуса (см. фиг.1) в рабочее положение перпендикулярно корпусу и раскладывают консоли 9 на угол, соответствующий «гиперзвуковой» конфигурации крыла (см. фиг.3) и программе изменения угла атаки на режиме самобалансировки.
Выдвигают поверхности хвостового оперения 7 в рабочее положение, поворачивают щитки воздушного тормоза 5 и 16 в положение, соответствующее режиму самобалансировки на заданном угле атаки (см. фиг.3).
Стабилизируют угловую ориентацию МРАМ на траектории снижения с помощью реактивной системы управления (поз.12, 13, 23 на фиг.1-3) до момента достижения требуемой эффективности органов аэродинамического управления.
Осуществляют аэродинамическое управление траекторией полета МРАМ в зону выбранного аэродрома посадки, в частности выполняют маневр наведения на гиперзвуковой и большой сверхзвуковой скорости с помощью изменения углов раскладки консолей 9.
Производят перебалансировку МРАМ на умеренный угол атаки, соответствующий обычному авиационному режиму полета, раскладывают консоли крыла в «маршрутную» конфигурацию (см. фиг.4) и затем осуществляют типичное авиационное управление заданными режимами полета.
Завершают маневр наведения на выбранный аэродром. Если на МРАМ установлены выдвижные ВРД 14 (см. фиг.5), то осуществляют соответствующую процедуру их выдвижения и запуска на заданной дозвуковой скорости (см. фиг.16).
Выполняют маневр захода на посадку, выпуск взлетно-посадочной механизации крыла (закрылка 24, см. фиг.4, фиг.5) и выпуск шасси.
Производят посадку МРАМ на ВПП, при этом осуществляют полное раскрытие воздушного тормоза (поз.5 и 16) и выпуск тормозного парашюта.
Если на МРАМ в «стартовой» конфигурации не предусмотрена установка ВРД, но после посадки требуется осуществить перелет на аэродром космодрома (именно перелет, а не доставку наземным или речным транспортом), то тогда производят навеску авиационной силовой установки на соответствующие узлы (см. фиг.6, поз.15) в районе центра тяжести летательного аппарата. Далее процедуру перелета с одного аэродрома на другой выполняют в соответствии с отработанными в авиации нормами и правилами. Если с аэродрома промежуточной посадки и с космодрома имеется доступ на подходящую наземную (речную) транспортную магистраль, то тогда МРАМ преобразуют в компактную конфигурацию (убирают шасси, складывают крыло и щитки воздушного тормоза, убирают хвостовое оперение) и в сложенном состоянии перевозят его на космодром.
Все перечисленные операции, за исключением переворота по тангажу и закрытия сопел маршевой ракетной установки обтекателем, уже либо применяются в ракетной и авиационной технике, либо содержаться в описаниях запатентованных прототипа и аналогов. Осуществимость же переворота на большой высоте (вблизи условной границы атмосферы) и закрытие сопел маршевой ракетной установки обтекателем подходящей конструкции на современном уровне развития техники не должно вызывать сомнений.
Таким образом, заявленное изобретение потенциально может быть реализовано на базе имеющихся передовых достижений ракетной и авиационной техники.
Изобретения относятся к области ракетно-космической техники и касаются аэродинамических компоновок и способов возвращения на космодром многоразовых ракетно-авиационных модулей (МРАМ). Эти модули являются ракетными ускорителями, образуя первую ступень ракеты-носителя (РН) при стыковке своими корпусами (1) со второй ступенью (18) РН. Корпус (1) МРАМ имеет типичную тандемную компоновку баков и маршевых жидкостных ракетных двигателей (ЖРД). Прямое крыло со сложенными консолями в стартовой конфигурации располагается вдоль корпуса (1). После отделения МРАМ от второй ступени (18) это крыло поворачивается в рабочее положение перпендикулярно продольной оси корпуса. Из сужающегося отсека (17), противоположного отсеку ЖРД, выдвигается в рабочее положение хвостовое оперение. Выступающие сопла маршевого ЖРД закрываются обтекателем из подвижных защитных створок (3). Этим завершается преобразование МРАМ в планер. Его полет к аэродрому посадки (отсеком ЖРД вперед) осуществляется с использованием выдвижных (14) (или съемных) воздушно-реактивных двигателей. Техническим результатом изобретений является повышение доли массы полезной нагрузки в стартовой массе РН и снижение затрат ресурсов на возвращение МРАМ на космодром. 2 н. и 11 з.п. ф-лы, 16 ил.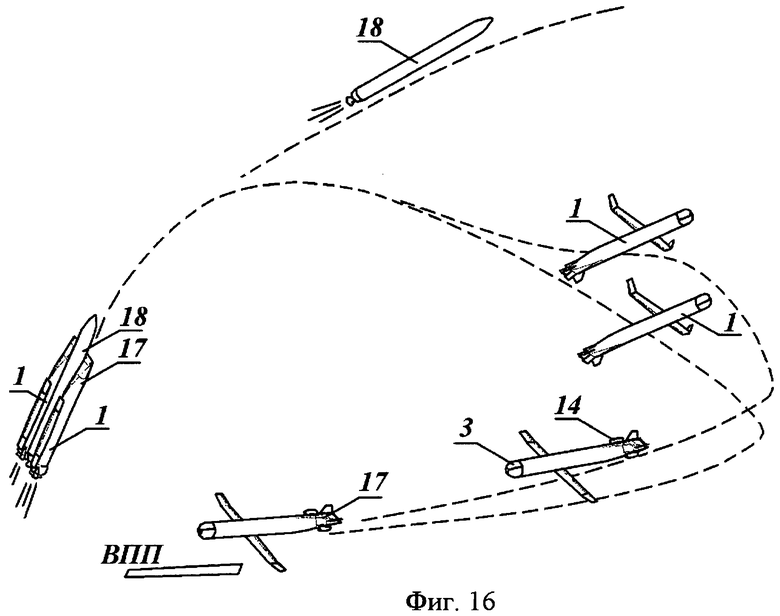
1. Многоразовый ракетно-авиационный модуль, содержащий корпус, включающий отсек маршевой ракетной установки, баки ракетного топлива, межбаковый отсек и концевой сужающийся отсек с размещенными в нем реактивными рулями, который имеет геометрическую форму, исключающую возникновение перед ним мощного отсоединенного скачка уплотнения, поворотное крыло с механизмами его перемещения и фиксации в положении вдоль оси корпуса на этапе выведения и в повернутом на 90° положении на этапе возвратного полета, имеющее повышенную термостойкость наиболее интенсивно нагреваемых участков поверхности, и внутренние баки авиационного топлива достаточного объема для выполнения перелета на заданное расстояние, органы аэродинамического управления движением модуля по трем каналам, трехопорное или велосипедное убираемое шасси, узлы сопряжения корпуса со второй ступенью ракеты-носителя, отличающийся тем, что на конце корпуса модуля около маршевой ракетной установки расположены подвижные термостойкие створки с механизмом их перемещения, выполненные с возможностью в открытом фиксированном положении на этапе выведения не мешать штатному функционированию маршевой ракетной установки, а в закрытом положении на этапе возвратного полета - с возможностью образования вокруг выступающих элементов маршевой ракетной установки головного обтекателя, причем управляемые аэродинамические поверхности хвостового оперения соединены с механизмом их выдвижения, обеспечивающим перемещение этих поверхностей из убранного в сужающийся отсек положения на этапе выведения в заданное рабочее положение на этапе возвратного полета.
2. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что механизм перемещения термостойких створок соединен с силовой конструкцией маршевой ракетной установки.
3. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что сужающийся отсек выполнен в форме переходного тела от цилиндра к клину, причем острая или незначительно затупленная термостойкая кромка клина параллельна строительной горизонтали модуля.
4. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что часть сегментов поверхности сужающегося отсека корпуса выполнена в виде подвижных щитков, конструкция и механизм перемещения которых обеспечивают их функционирование в качестве балансировочных поверхностей и/или воздушного тормоза.
5. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что поворотное крыло выполнено составным, состоящим из центроплана и раскладываемых консолей, которые на этапе выведения компактно прижаты к центроплану, а на этапе возвратного полета перемещены в рабочие положения.
6. Многоразовый ракетно-авиационный модуль по п.5, отличающийся тем, что в районе шарниров поворота консолей крыла размещают основные реактивные рули управления ориентацией модуля в канале крена.
7. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что в сужающемся отсеке устанавливают контейнер с тормозным посадочным парашютом.
8. Многоразовый ракетно-авиационный модуль по п.1, отличающийся тем, что узлы его сопряжения со второй ступенью ракеты-носителя выполнены с достаточной прочностью для безопасной передачи суммарной нагрузки от двух радиально соединенных модулей на вторую ступень.
9. Многоразовый ракетно-авиационный модуль по любому из пп.1-8, отличающийся тем, что вблизи его центра тяжести в корпусе или центроплане крыла расположены узлы сопряжения с одним или несколькими воздушно-реактивными двигателями с суммарной мощностью, достаточной для выполнения взлета с взлетно-посадочной полосы заданного класса.
10. Многоразовый ракетно-авиационный модуль по любому из пп.1-8, отличающийся тем, что в сужающемся отсеке установлен механизм выдвижения одного или нескольких воздушно-реактивных двигателей из закрытых на этапе выведения ниш в рабочее положение на заданной скорости возвратного полета на космодром.
11. Способ возвращения на космодром многоразового ракетно-авиационного модуля, имеющего компоновку по любому из пп.1-9, включающий отделение этого модуля от второй ступени ракеты-носителя на участке выведения при скорости, соответствующей числу М≈6÷8, выключение его маршевой ракетной установки, после подъема модуля на высоту, близкую к динамическому потолку, и уменьшения скоростного напора ниже заданной величины выполнение поворота крыла в плоскости строительной горизонтали из фиксированного стартового положения вдоль корпуса в фиксированное рабочее положение перпендикулярно корпусу, далее до момента входа в плотные слои атмосферы осуществление разворота модуля с помощью реактивных рулей и выдерживание его заданной угловой ориентации при входе в атмосферу, затем изменение ориентации модуля по выбранному закону с использованием в зависимости от скорости полета реактивных и/или аэродинамических органов управления, обеспечивающих формирование с учетом заданных ограничений на параметры движения по траектории планирования, приводящей на выбранный достижимый аэродром посадки, отличающийся тем, что на участке полета после выключения маршевой ракетной установки, но до возвращения модуля в плотные слои атмосферы производят перемещение термостойких створок из открытого положения в закрытое в виде головного обтекателя маршевой ракетной установки, выполняют с помощью реактивных рулей переворот модуля по тангажу на заданный угол в диапазоне 120÷150°, выдвигают рулевые поверхности хвостового оперения из сужающегося отсека в рабочее положение, а после посадки модуля на промежуточный аэродром осуществляют перемещение выдвинутых аэродинамических поверхностей и шасси в стартовую конфигурацию и затем модуль в компактной конфигурации наземным или речным транспортом перевозят на космодром.
12. Способ по п.11 возвращения на космодром многоразового ракетно-авиационного модуля, имеющего компоновку по п.9, отличающийся тем, что после посадки на промежуточном аэродроме модуль оснащают авиационной силовой установкой, заправляют авиационным топливом и производят типовой самолетный перелет модуля в режиме автоматического и/или дистанционного управления с промежуточного аэродрома на аэродром космодрома.
13. Способ по п.11 возвращения на космодром многоразового ракетно-авиационного модуля, имеющего компоновку по п.10, отличающийся тем, что возвращение производят на аэродром космодрома, причем траекторию планирования модуля в атмосфере сразу наводят на указанный аэродром по заданной программе, затем в заданных условиях на дозвуковой скорости производят выдвижение авиационной силовой установки и ее запуск, после чего осуществляют типичный самолетный полет модуля к аэродрому космодрома и посадку на него.
| US 4834324 А, 30.05.1989 | |||
| US 4265416 А, 05.05.1981 | |||
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ РАКЕТЫ-НОСИТЕЛЯ | 2006 |
|
RU2321526C1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
| РАКЕТНЫЙ БЛОК МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2053168C1 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |

