Изобретение относится к ракетно-космической технике и может быть использовано при создании всеазимутальных систем морского старта для выведения без отчуждения поверхностей Земли под поля падения отработавших ракетных блоков. Составной воздушно-космический комплекс (СВКК) с возвращаемыми первой и второй ступенями (ВПС и ВВС), последняя из них с дельтовидным несущим корпусом состыкована в А-образном корпусе ВПС, имеющем в гондолах корневых частей первого стреловидного крыла турбореактивные двигатели с лобовыми воздухозаборниками и отбором мощности на привод четырех несущих винтов (НВ), смонтированных при равном удалении в плане осей их вращения от центра масс на концах их поворотных профилированных штанг, отклоняющихся от бортов корпуса ВПС на угол 88° в вертикальной плоскости, размещенной в плоскости консолей его заднего Х-образного крыла при виде сзади и на узлах поворота, установленных спереди центра масс, используемых по толкающей схеме для посадки на месте старта в режиме его полета как турбрвинтовентиляторного самолета вертикально садящегося на хвост. Изобретение направлено на создание унифицированных многоразовых СВКК легкого, среднего и тяжелого класса для тандемной, двух- и трех-пакетной схем, позволяющих улучшить балансировку и летные характеристики при возвратном полете отработавших ВПС и ВВС, способных раздельно возвращаться на значительные расстояния к месту морского старта и осуществлять после состыковки ВВС с ВПС вертикальную их совместную посадку на более чем одну площадку, смонтированную с плавучим космодромом или вынесенную отдельно от него.
В настоящее время известно достаточно большое количество технических решений, обеспечивающих применение многоразовых ракетных блоков (МРБ). Среди них можно выделить ряд основных средств возвращения и вертикальной их посадки.
1. Возвращаемые МРБ, реализующие маневр приведения и посадку на площадку с использованием несущих аэродинамических поверхностей и авторотирующих одного или двух соосных НВ. Данные технические решения по данному вопросу защищены российскими патентами, например, RU B64G 1/62 и . Обобщенным признаком данного направления является наличие НВ со складываемыми или убираемыми лопастями как без, так и с аэродинамическими поверхностями, реализующими аэродинамическое качество, величина которого в основном и определяет приведение и вертикальную посадку ракетного блока на то или иное предельное расстояние от трассы полета или посадочной площадки. Существенным недостатком данного способа с авторотирующими НВ (см. патент RU является также значительная величина вертикальной составляющей скорости ракетного блока в момент касания посадочной площадки, что предопределяет наличие в каждой лопасти авторотирующего НВ твердотопливного двигателя, оснащенного сменным цилиндрическим корпусом и реактивным соплом, но и наличием (см. патент силовой установки (СУ) с двумя соосными НВ, обеспечивающими, по необходимости, и выполнение вертикального взлета и посадки.
2. Возвращаемые МРБ, реализующие перелет с маневром приведения в положении жидкостных ракетных двигателей (ЖРД) «вперёд по полёту» для аэродинамического торможения и вертикальной посадки на плавающую платформу с помощью одного с регулируемой тягой центрального ЖРД, создающего обнуление вертикальной скорости снижения, как у МРБ Falcon 9, который с ракетно-динамическим способом его вертикального возвращения на место старта израсходует 30 тонн топлива, а при удалении платформы для вертикальной посадки в 546 км от места старта для возвращения МРБ его ЖРД создает тормозной импульс 840 м/с и израсходует 13,2 тонн.
Известен, в частности МРБ первой ступени ракеты-носителя (РН), содержащий ракетный блок и планер, выполненные в виде отдельных моноблоков, объединенных узлами силовой связи. Ракетный блок снабжен маршевыми двигателями и двигателями реактивной системы управления. Носовая часть ракетного блока закрыта обтекателем. Планер имеет фюзеляж, две складывающиеся консоли крыла, складывающееся хвостовое оперение, выдвижной аэродинамический щиток и посадочное устройство. Консоли крыла снабжены осями поворота, размещенными в поперечной плоскости, проходящей в районе центра масс конструкции ускорителя. В сложенном положении консоли крыла уложены вперед вдоль фюзеляжа и размещены кромками в его пазах, образуя треугольное крыло малого удлинения с возможностью образования крыла большого удлинения в раскрытом положении. Хвостовое оперение в раскрытом положении имеет V-образную форму и может быть снабжено двумя воздушно-реактивными двигателями (ВРД) для возвратного полета ускорителя до аэродрома вблизи места старта РН (см. патент RU 2053936, B64G 1/14). Установка ВРД на консолях хвостового оперения усложняет конструкцию хвостового оперения и требует тепловой защиты самих двигателей, что приводит к увеличению массы ускорителя. Наличие балансировочного щитка и поворотных консолей крыла существенно усложняет балансировку ускорителя во всем диапазоне скоростей полета. Малое расстояние от аэродинамического фокуса оперения до центра масс ускорителя приводит к резкому увеличению площади оперения и его массы. Выполнение ракетного блока и планера в виде отдельных моноблоков; увеличивает массу ускорителя в целом. Кроме того, раскладка консолей в атмосфере существенно изменяет аэродинамику ускорителя и приводит к необходимости решения проблемы как повышения стабильности управления, так и обеспечения улучшения самой стабилизации при переходных маневрах.
Известен также многоразовый ускоритель РН (см. патент RU 2148536, B64G 1/14), содержащий корпус, включающий баки для окислителя и горючего, носовой отсек с обтекателем, межбаковый и хвостовой отсеки, ракетную двигательную установку, цельно-поворотное крыло с устройствами для его поворота и фиксации в положении вдоль ускорителя на этапе выведения и в повернутом на 90° положении на этапе возвратного полета, горизонтальное и вертикальное оперение, трехопорное посадочное устройство, органы аэродинамического управления и узлы стыковки со второй ступенью РН. Ускоритель снабжен двумя турбореактивными двигателями (ТРД) с воздухозаборниками, установленными в носовом отсеке, и топливную систему с основными топливными баками в крыле, расходными и балансировочными баками в носовом отсеке. Этот ускоритель входит в состав РН и снабжен цельно-поворотным крылом. При этом положение оси разворота крыла в исходном положении смещено от положения этой оси в развернутом положении. Для смещения крыла с одновременным разворотом и последующей его фиксацией необходимо использование сложного механизма, имеющего значительные габариты и массу, что ведет к увеличению габаритов и массы ускорителя и уменьшению массы полезного груза. При входе ускорителя в плотные слои атмосферы после его отделения от РН прямое крыло этого ускорителя будет подвергаться более интенсивному нагреву в сравнении со стреловидным крылом, что потребует использования для сохранения его работоспособности дополнительной теплозащиты, что ведет к увеличению массы ускорителя.
Крыло установлено на корпусе по схеме «высокоплан», поэтому в процессе торможения в атмосфере крыло не экранирует корпус, вследствие чего для сохранения приемлемой температуры корпуса понадобится дополнительное количество теплозащиты, что также ведет к увеличению массы ускорителя. Кроме того, схема крыла «высокоплан», которая, как правило, при сопоставимых условиях уступает по величине минимальной посадочной скорости схеме «низкоплан». Предложенный в патенте RU 2148536 как и в патенте US 6454216 В1 вариант стационарного размещения ТРД в носовом отсеке сопряжен еще с двумя недостатками:
- повышенным лобовым сопротивлением корпуса на сверхзвуковых режимах полета из-за того, что носовая часть имеет форму, близкую к части сферической;
- пониженной величиной эффективной тяги ТРД (из-за существенного искривления входных и выходных газовых каналов двигателей).
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является ракета-носитель (патент RU 2482030, B64G 1/14, от 10.05.2013) с многоразовым ускорителем и системой стабилизации, включающий в себя вторую ступень и ускоритель первой ступени (УПС), которые содержат ракетные блоки с ракетными двигателями (РД) и двигателями управления, которые соединены между собой в виде крылатой ракеты с низко-расположенным крылом, смонтированным на корпусе УПС, имеет на крыле кили и ТРД силовой установки (СУ), но и посадочное устройство с многократно используемыми элементами, при этом установленный на ракетном блоке носовой отсек снабжен пилотской кабиной и оснащен управляемыми поворотными заглушками, количество которых равно количеству точек соединения носового отсека со второй ступенью, в местах соединения со второй ступенью в носовом отсеке выполнены карманы, два ТРД закреплены на верхней поверхности консолей крыла переменной стреловидности и снабжены управляемыми защитными экранами, стабилизатор выполнен в виде двух вертикальных килей, установленных на консолях крыла, в ракетном блоке многоразового ускорителя вокруг его продольной оси и симметрично относительно его поперечной оси, параллельной крыльям, установлено четное число дросселируемых ракетных двигателей.
Недостатком этого технического решения является, в частности, низкое аэродинамическое качество планера возвращаемой, т.е. первой ступени из-за размещения гондол ТРД на консолях крыла, которые имеют значительную высоту. Это приводит к неоправданному ухудшению характеристик РН при старте. Кроме того, имеются также следующие недостатки: плохие аэродинамические качества ракеты на старте из-за громоздкости планера самолета-комплекта и наличия громоздких консолей крыла, неуправляемость возвращаемой ступени на больших высотах. При возвращении самолета-комплекта его ТРД для создания реактивной тяги и управляющего момента запускают на относительно небольшой высоте, например, 20…23 км. Полет до этой высоты полностью неуправляемый. Применение громоздких, имеющих большой вес крыльев переменной стреловидности не оправдано из-за того, что единственной задачей создания возвращаемой ступени является ее посадка, а не совершение сложных маневров на дозвуковых и сверхзвуковых скоростях. Следует признать целесообразным для улучшения стартовых характеристик РН, необходимо добиться конструкции «чистого крыла» в планере самолета-комплекта.
Учитывая вышеизложенные обстоятельства, по совокупности наиболее близких отличительных признаков в качестве прототипа для настоящей заявки на изобретение выбраны технические решения многоразового ускорителя в патенте RU 2482030, B64G 1/14, компоновка и конструкция которого обеспечивают его применение в качестве ускорителя первой ступени как в тандемной, так и в пакетной схемах РН.
Предлагаемым изобретением решается задача в указанном выше известном многоразовом возвращаемом ускорителе в увеличении доли массы полезного груза в стартовой массе РН, уменьшении высоты РН на стартовом столе, но и способности возвращаться на значительные расстояния к месту морского старта, и осуществлять вертикальную посадку на площадку малых размеров, особенно, плавучего космодрома.
Сущность изобретения заключается в том, что многоэлементный составной воздушно-космический комплекс (СВКК) содержит в укороченной или удлиненной схеме тандем (УкСТ или УдСТ) возвращаемые с боле чем одним кислородно-метановым РД (КМРД) первую и вторую ступени (ВПС и ВВС), последняя из них представляет собой разгонный или беспилотный либо пилотируемый орбитальный самолет (РОС или БОС либо ПОС) с использованием на старте в межкорпусном пространстве ВПС или сверху ВПС с системой спасания, либо в их комбинации соответственно, выполненный по схеме "бесхвостка" с несущим корпусом дельтовидной формы в плане и тепловым экранированием по округлым бокам и на нижней его стороне, но и поверхностей и кромок высокорасположенного крыла (ВРК), имеющего поперечное V с углом ϕ=+25° и складывающиеся стреловидные консоли вверх на угол 45° и 90° и их размещением от горизонтали соответственно под углом 70° и 115°, а по обе стороны от оси симметрии или киля в кормовых гондолах сверху РОС или ПОС, БОС смонтированы два ТРД форсажных (ТРДФ), используемых в атмосфере с лобовыми их воздухозаборниками (ЛВЗ) при безфорсажном/форсажном режиме самолетного полета с обеспечением соответствующей тяговооруженности не менее 0,48/0,81 от возвращаемой массы ПОС, БОС как одними ТРДФ или центральным МРД из их трех либо в их комбинации при горизонтальном/вертикальном положении его корпуса, при этом с межкорпусным Λ-образным пространством ВПС выполнена по аэродинамической схеме «тандем» с задним Х-образным крылом (ХОК) при виде сзади, имеющим разнесенные консоли, смонтированные на каждом корпусе, отклонены наружу под углом 45°-60° от плоскости симметрии и снабжена в гондолах корневых частей переднего стреловидного крыла (ПСК), более чем, одним упомянутым ТРД, которые установлены и в двух подкрыльных, и двух над-крыльных гондолах (ПКГ и НКГ), смонтированных вдоль каждого корпуса ВПС с их ЛВЗ, сконфигурированными для дозвуковой и сверхзвуковой работы, но и отбором мощности на привод воздушных несущих винтов (НВ), используемых в атмосфере совместно с ТРД для возвращаемого горизонтального крейсерского полета, но и при выполнении технологии вертикального взлета-посадки (ВВП) в четырехвинтовой несущей схеме (ЧВНС), равноудаленных в плане от центра масс, смонтированных на концах поворотных профилированных штанг (ППШ), отклоняющихся вперед и назад по полету от бортов корпуса ВПС на угол 84°-88° в вертикальной плоскости, размещенной в плоскости консолей ХОК и на их узлах поворота, установленных спереди центра масс, используемых по толкающей схеме для автоматической вертикальной посадки на месте старта при вращающихся в одном направлении диагонально расположенных НВ, после раскладывания их четырех ППШ, выполненных как со свободным их вращением при прохождении их лопастей соответственно перед корпусом ВПС и консолями его ПСК, так и в виде одно- либо двухлопастных НВ (ОНВ либо ДНВ) соответственно с профилированными противовесами либо с равно- или разновеликими лопастями, меньшие из последних, образующие сбалансированные полуторалопастные НВ (ПНВ), имеют радиус, определяемый из соотношения: Rмен=(1/2…1/3)×Rбол, м (где: R,бол - радиус большей лопасти), но и с жестким креплением их лопастей, без автомата их перекоса, возможностью изменения общего их шага, автоматической установки их лопастей в положение их авторотации, но и выполнены таким образом, что после их отключения от трансмиссии лопасти их ПНВ фиксируются вдоль соответствующих ППШ, которые в сложенном их положении устанавливаются вдоль бортов каждого корпуса ВПС и укладываются в соответствующие ниши внешних обтекателей корпусов (ВОК) с автоматически открывающимися продольными створками, но и размещаются меньшими лопастями ПНВ наружу от конца ППШ при виде сбоку, причем в четырехдвигательной комбинированной СУ (ЧКСУ) каждое круглое сопло ее ТРД снабжено системой управления вектора тяги (УВТ), создающей синхронную маршевую, но и синфазно или дифференциально раздельно отклоняемую на угол 20° от горизонтали/вертикали реактивную тягу, направленную только соответственно вверх и вниз/вперед и назад от средней линии ПСК для выполнения при горизонтальном/вертикальном положении корпуса ВПС его полета в конфигурации реактивного самолета/турбовинтовентиляторного самолета ВВП, но и изменения балансировки соответственно по тангажу или крену/тангажу или рысканью, при этом внешние борта носовой части каждого Λ-образного корпуса ВПС в местах сбоку реактивных сопел каждого ТРД снабжены термостойкими щитками или имеют термостойкое покрытие, причем сред-нерасположенное ПСК, содержащее вдоль всего его размаха флаппероны и внутренние закрылки, имеет площадь, составляющую 41-42% от общей площади двух крыльев, обеспечивающих при возвращении одного ВПС в атмосфере как самолета удельную на них нагрузку 360 кг/м2 и их малом удлинении (λ) λ=1,84 и λ=1,65 соответственно у ПСК и ХОК, при этом консоли ХОК, имея переменную стреловидность, содержат на их концах обтекатели с амортизационными стойками четырехопорного избирающегося шасси и небольшими самоустанавливающимися колесами для выполнения в полетной конфигурации турбовинтовентиляторного самолета вертикальной посадки на хвост, причем нижняя часть каждого обтекателя шасси, вынесенного с законцовками консолей ХОК назад по полету от сопел реактивных двигателей ВПС, снабжена в продолжение его наружного диаметра полусферическими левой и правой створками, которые смыкаясь в вертикальной плоскости, размещенной параллельно плоскости симметрии, закрывают небольшое колесо, при этом выдвижная заслонка каждого ЛВЗ, смонтированная на корпусе и ВВС, и ВПС перед входом ЛВЗ, способна отклоняться в обоих направлениях вверх/вниз для соответствующего полного закрывания/открывания воздушного входа от аэродинамического потока, причем силовая связь выводимого ПОС/БОС, например, с ВПС и состыкованным ее РОС в СВКК с УдСТ обеспечивается через переходный отсек, на котором с помощью сбрасываемых пилонов смонтированы четыре твердотопливных ускорителя системы спасания, увеличивающих мощность СВКК в штатном полете и создающих экстренное отделение и управляемый увод ПОС/БОС при аварии.
Кроме того, для обеспечения работы упомянутых ТРД на высоте полета и ВВС, и ВПС до и более 22-23 км в передней части каждого упомянутого их ЛВЗ с их упомянутой выдвижной заслонкой, представляющей собой центральное конусное тело, выполненное в виде подвижного носового обтекателя, способного втягиваться и выдвигаться в обоих направлениях назад и вперед для соответствующего требуемого открывания и до полного закрывания воздушного входа ЛВЗ от аэродинамического потока, при этом на режимах ВВП и зависания в упомянутой ЧКСУ левая и правая пара упомянутых ТРД имеют для отбора части 40…44% их мощности через муфты их сцепления передние выводы их валов, проложенных в носовой части корпуса ВПС и вращательно связанных с их угловыми в вертикальной плоскости редукторами, имеющими выходные валы, которые вращательно связывают каждую пару ТРД с левым и правым Т-образным в плане объединительным редуктором, которые смонтированы в носовой части упомянутого корпуса ВПС, имеют как связывающий их синхронизирующий вал, так и боковые выходные валы, каждый из которых передает распределенную мощность каждому угловому в плане редуктору, который интегрирован с узлом поворота упомянутой каждой ППШ и в свою очередь выходным его валом, проложенным в носке ППШ, передает крутящий момент угловому в вертикальной плоскости редуктору соответствующего ПНВ, конструкция лопастей которого предопределяет уменьшение длины валов трансмиссии, упомянутых боковых ВОК и их створок, причем на режимах ВВП и зависания упомянутого ВПС с его ЧВНС-Х4 управление по крену осуществляется посредством изменения шага двух левых и двух правых ПНВ, при этом на режимах ВВП и зависания ВПС при удельной нагрузке на мощность его упомянутой ЧКСУ, составляющей ρN=1,3-1,65 кг/л.с., упомянутые ТРД, обеспечивая подъемную реактивную тягу, составляющую 16-20% от общей подъемной тяги, выполнен с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ТРД, оснащенную последовательно соединенными блоком приведения давления в компрессоре их ТРД, блоком формирования заданного значения частоты вращения и углового положения лопаток их турбин и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ТРД и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ЧВНС-Х4, составляющей с учетом потерь от обдува самих ППШ ρВТ=1,25, включает режимы работы ТРД как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной их мощности на привод упомянутых ПНВ соответственно, например, в упомянутой ЧКСУ как от четырех работающих ТРД, так и от трех из работающих ТРД с автоматическим выравниванием и равным перераспределением оставшейся мощности между ПНВ при отказе соответствующего ТРД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ТРД, которые при удельной вертикальной тяговооруженности в ЧКСУ, составляющей ρВТ=1,25, обеспечат режим аварийной вертикальной посадки в течение 0,5 минут, причем для выполнения перелета от предприятия-изготовителя ВПС до места старта, например, плавучего космодрома он снабжен интегрированной системой управления, оснащенной связью с системой глобального позиционирования и системой командования и управления силовой установкой с электродистанционной системой управления (ЭДСУ), но и выполнен с возможностью дистанционного управления оператором как с командного пункта на земле или плавучего космодрома, так и при визуальном его контроле с борта рядом летящего самолета-топливозаправщика, а также оснащен в межбаковой части каждого корпуса ВПС основным топливным баком, но и выдвижной системой дозаправки авиатопливом в полете, смонтированной сверху на носовой части корпуса ВПС и слева от продольной его оси, при этом в СВКК с упомянутой УкСТ при размещении РОС, ПОС/БОС в межкорпусном Λ-образном пространстве ВПС на боковых сторонах их корпусов и ВПС имеются узлы стыковки/расстыковки соответственно на внешних и внутренних бортах сопрягающихся корпусов, а каждый СВКК с УкСТ на носовой и кормовой частях ВПС снизу или снизу и сверху упомянутого Л-образного корпуса имеет узлы стыковки двух или трех таких СВКК, позволяющие их использовать в соответствующих схемах после складывания нижних или в центральном СВКК всех консолей и ХОК их ВПС, и ВРК их БОС, которые отклоняются наружу и фиксируются перпендикулярно плоскости симметрии, причем в одном либо в состыкованных двух или трех СВКК с УкСТ упомянутые все их КМРД одного ВПС с БОС либо двух ВПС с РОС и БОС или трех ВПС с двумя РОС и БОС работают на топливе из своих баков, выводят БОС на орбиту высотой 55-56 км при скорости 2 км/с при одновременной перекачке топлива из разгонных ВПС и РОС в баки выводимого на орбиту БОС, при этом при горизонтальном расположении корпуса ВПС для выполнения взлета-посадки в режиме его полета как реактивного самолета два обтекателя шасси нижних сложенных на угол 20°-35° его консолей ХОК снабжены на их законцовках узлами поворота, отклоняющими в вертикальной плоскости вниз и обратно вверх на угол 90° наравне с тем, что корпус ВПС снабжен убирающимися основными стойками колесного шасси велосипедного типа.
Способ применения СВКК, заключающийся в том, что после выполнения миссии и возврата, например, БОС в режиме самолетного полета в атмосфере имеет возможность при его посадке использовать убирающееся колесное шасси или пристыковываться к ВПС при горизонтальном их совместном полете с использованием гибких креплений между ними с их системами автоматической стыковки/расстыковки для выполнения соответственно маневров приведения на посадочную полосу аэродрома с горизонтальной посадкой и использованием несущих аэродинамических поверхностей с тормозной парашютной системой БОС или в район стартового комплекса, например, системы морского старта после осуществления состыковки БОС с ВПС для их совместной вертикальной посадки на более чем одну площадку, смонтированную с плавучим космодромом или вынесенную отдельно от него, при этом по оси симметрии на конце носовой части Λ-образного корпуса ВПС смонтирована грузовая лебедка с автоматическим управлением и тросом, имеющим на его конце конусный ловитель с захватом, позволяющим на расстоянии кратно превышающим длину корпуса ВПС совершить безопасный подлет БОС к нему в полетной конфигурации самолета и выполнить после выравнивания скоростей их полета предварительное пристыковывание посредством гибкой системы крепления с ответной частью, размещенной на конце носовой выдвижной штанги БОС, причем после предварительного пристыковывания БОС к ВПС, который грузовой лебедкой подтягивает к основному узлу стыковки/расстыковки жесткой системы захвата и крепления с автоматическим соблюдением каждым автопилотом БОС и ВПС соосности двух узлов стыковки жесткой системы захвата и крепления, но и поступательного подлета равновеликого с требуемым при этом подтягиванием БОС вдоль оси ВПС грузовой лебедкой к основному узлу жесткой системы его крепления, который, взаимодействуя с ответной частью узла жесткой системы крепления БОС, пристыковываясь наравне с боковыми узлами стыковки ВПС и БОС, обеспечивают жесткую систему крепления с одновременным складыванием в БОС консолей ВРК и выполнение совместно-состыкованного горизонтального полета, при этом состыкованные ВПС с легким БОС конвертируются в турбовинтовентиляторный составной самолет ВВП с ЧВНС-Х4 для обеспечения автоматического набора высоты до 1000 м и осуществления переходного режима полета с последующим пикированием над посадочной площадкой, например, плавучего аэродрома и выполнения маневра «свечка» и когда Λ-образный корпус ВПС приводится в вертикальное положение и его упомянутые ПНВ и их криогенные и ТРД в ВПС, и ТРДФ в БОС или только центральный КМРД в БОС либо в их комбинации создают соответствующие подъемную силу и безфосажную и форсажную реактивную тяги, но и достижение заданной скорости подъема с выполнением режима зависания и последующей вертикальной посадки на хвост с заданной скоростью снижения, причем к упомянутому шасси на ХОК ВПС кормовые обтекатели корпусов и РОС, и ПОС/БОС имеют раскладываемые или выдвижные четыре опоры для совместной их посадки на хвост с обеспечением вертикального их положения.
Многоэлементный многоразовый СВКК с возвращаемыми ПОС/БОС и ВПС состыкован с РОС, выполненный в виде конвертируемого турбовинтовентиляторного самолета ВВП, способный обеспечивать стабильный и управляемый возвратный полет в широком диапазоне высот и скоростей и, особенно, дальности полета. Наличие на многоразовой ВПС двух несущих поверхностей (ПСК и ХОК), разнесенных вдоль его корпуса, обеспечивает необходимую устойчивость и управляемость при всех скоростях полета, и минимизацию вредного сопротивления на дозвуковых режимах полета. Принятая тандемная самолетная схема приемлема при безмоторном спуске в атмосфере на больших углах атаки (до 40°) и оптимальна на участке возвратного моторного и переходного полета, но и вертикальной посадке. Выполнение заднего ХОК с рулями высоты и направления, разнесенного на Λ-образном корпусе ВПС, обеспечивает необходимую балансировку по моментам, действующим на СВКК, сохраняя при этом запасы по отклонению на стабилизацию. Кроме этого, заднее ХОК допускает использование его органов аэродинамического управления для уменьшения угла отклонения маршевых КМРД на этапе его выведения, повышая тем самым их эффективность. Оснащение СВКК и его ВПС с ПСК и двумя парами криогенных ТРД (КТРД) обеспечивает ему моторный возвратный полет, что дает возможность выполнить отделение ВПС с РОС от, например, ПОС на больших высотах и скоростях полета, на большем удалении от места старта и увеличить тем самым массу выводимого на орбиту полезного груза. Расположение КМРД в кормовых частях на Λ-образном корпусе ВПС и КТРД в корневых частях ПСК и их НКГ и ПКГ не увеличивает лобового сопротивления СВКК, не требует дополнительной тепловой защиты двигателей при входе в плотные слои атмосферы. Многоразовый СВКК может быть снабжен реактивной системой управления на внеатмосферном участке возвратного полета и на начальном этапе атмосферного полета. Реактивная система управления обеспечивает возможность управления ВПС с РОС в СВКК и его стабилизации относительно центра масс на начальном этапе возвратного полета после отделения, например, от ПОС.
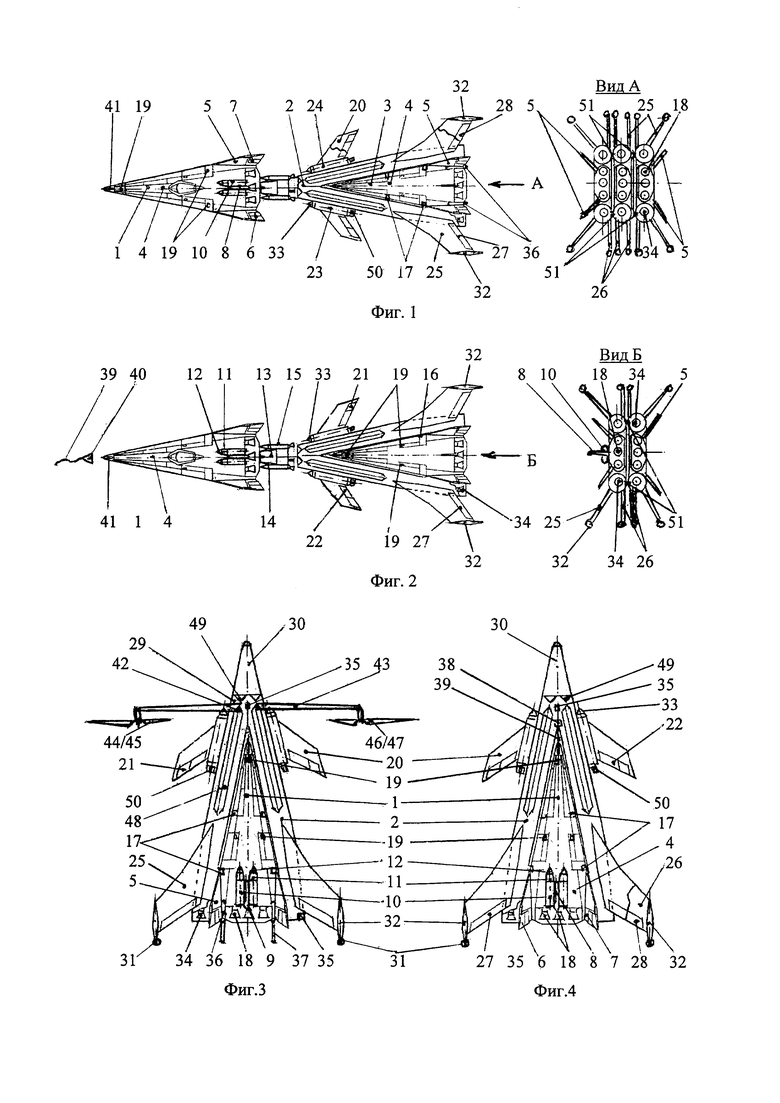
Предлагаемое изобретение многоэлементного СВКК, включающего ПОС/БОС с его ВРК и системой спасания, РОС с его ВРК, смонтированного в корпусе ВПС с его задним ХОК, и ПСК, четырьмя КТРД с УВТ их круглых сопел, приводящих два левых и два правых толкающих ПНВ, иллюстрируется общими видами на фиг. 1-4:
- на фиг. 1 - изображен на виде сверху тяжелый ПОС, состыкованный с центральным СВКК в трехпакетной схеме, крайние из них СВКК с ВПС и их РОС- ускорители, СВКК показаны со сложенными консолями ВРК и двумя/четырьмя консолями ХОК;
- на фиг. 2 - изображен на виде сверху среднего класса ПОС, состыкованный (условно показан трос 39 и ловитель 40 от ВПС) с СВКК в двухпакетной схеме со сложенными нижними их консолями ХОК, второй СВКК с ВПС и его РОС-ускорители;
- на фиг. 3 / фиг. 4 - изображен на виде спереди легкий/средний, тяжелый БОС, состыкованный после его возврата в атмосфере по УкСТ с ВПС в Λ-образном пространстве его корпуса при вертикальной совместной посадке на хвост ВПС и БОС с использованием соответственно тяги четырех КТРД с двумя парами ПНВ и двух КТРДФ с центральным КМРД/четырех КТРД с двумя КМРД и двух КТРДФ с двумя крайними КМРД при ракетно-динамическом способе его вертикальной посадки.
Многоэлементный СВКК включает возвращаемые ПОС/БОС 1 и ВПС 2 с его РОС 3 (см. фиг. 1-4). Идентичные ПОС/БОС 1 и РОС 3 выполнены по схеме "бесхвостка" с несущим корпусом 4 дельтовидной формы в плане и стреловидным ВРК, имеющим поперечное V с углом ϕ=+25° и консоли 5 с элеронами 6 и элевонами 7, которые складываются вверх на угол 45° и 90°. ПОС/БОС 1 содержат кабину экипажа и грузовой отсек пенального типа (на фиг. 1-4 не показано), а по обе стороны от киля 8 с рулем направления 9 в кормовых гондолах 10 сверху корпуса 4 смонтированы два КТРДФ, используемых в атмосфере с их ЛВЗ 11 и заслонками 12. Связь ПОС/БОС 1 с носовой частью ВПС 2 осуществляется через переходный отсек 13, на котором с помощью сбрасываемых пилонов 14 смонтированы четыре твердотопливных ускорителя 15, используемых на старте или при спасании. Связь и ПОС/БОС 1, и РОС 3 с Λ-образным пространством 16 корпуса 2 ВПС обеспечивается узлами 17 стыковки/расстыковки В кормовой части корпуса 4 ПОС/БОС 1 и РОС 3 имеется двигательный отсек с тремя КМРД 18 и реактивная система стабилизации и управления 19.
Планер ВПС 2 выполнен с Л-образным корпусом по схеме «тандем», имеет ПСК 20 с внешними их флапперонами 21 и внутренними закрылками 22, двумя НКГ 23 и двумя ГОСТ 24, заднее ХОК с переменной стреловидностью двумя верхними 25 и двумя нижними 26 консолями, имеющими соответственно рули направления 27 и высоты 28, а также носовой отсек 29 с его головным обтекателем 30, но и четырехстоечное шасси с колесами 31, установленное на стойках обтекателей 32, смонтированных на концах консолей 25-26 ХОК. Каждый обтекатель 32 на конце снизу снабжен полусферическими створками (на фиг. 1-4 не показано), закрывающими каждое небольшое колесо 31. Каждый ЛВЗ их НКГ 23 и ПКГ 24 имеет подвижное центральное конусное тело 33. В кормовой части ВПС 2 имеется более чем один его КМРД 34 и реактивная система стабилизации и управления 35. Кормовые обтекатели 36 ПОС/БОС 1 и РОС 3 имеют выдвижные четыре опоры 37 при совместной посадке на хвост с колесным шасси ВПС 2 в составе вертикально садящегося СВКК. На конце носовой части 29 вершйны Л-образного корпуса ВПС 2 смонтирована грузовая лебедка 38 с тросом 39 и конусным ловителем с захватом 40, взаимодействующим с выдвижной штангой 41 ПОС/БОС 1, которые пристыковываясь наравне с боковыми узлами 17 стыковки ВПС 2 и ПОС/БОС 1, обеспечивают жесткую систему крепления с одновременным складыванием в ПОС/БОС 1 консолей ВРК 5.
Комплекс средств возврата и посадки позволяет осуществить после отделения от второй ступени ПОС/БОС 1 и полет ВПС 2 с РОС 3, и вертикальную их посадку на посадочную площадку плавучего космодрома. Указанный комплекс включает:
- реактивную систему управления 35 (РСУ);
- механизированное ПСК 20 малого удлинения с внешними флапперонами 21;
- заднее ХОК со стреловидными консолями 25-26, имеющими на их законцовках обтекатели 32 с амортизирующими стойками шасси и небольшими колесами 31;
- стреловидные консоли 25 и 26 ХОК с рулями направления 27 и высоты 28;
- механизмы поворота 42 и фиксации ППШ 43 с их левыми передним 44/задним 45 ПНВ и правыми передним 46/задним 47 ПНВ, а также и укладки ППШ 43 в ниши ВОК 48 с автоматическими их створками (на фиг. 1-4 не показано);
- для укладки ППШ 43 и их ПНВ 44-47 снаружи корпуса 2 ВПС расположены в плоскости консолей 25-26 ХОК четыре ВОК 48, передние части которых закрываются козырьками 49, отклоняющимися от внешнего контура обтекателя 30;
- механизм перемещения центрального конусного тела 33 в ЛВЗ их НКГ 23 и ПКГ 24 в четырехдвигательной комбинированной СУ (ЧКСУ);
- посадочное устройство в составе четырехопорного шасси 31 на заднем ХОК 25-26 с дополнительными выдвижными опорами 37 на ПОС/БОС 1 и РОС 3;
- бортовую систему управления и комплекс рулевых следящих систем (на фиг. 1-4 не показано), обеспечивающих автоматическую вертикальную посадку на более чем одну площадку малых размеров, вынесенную отдельно от плавучего космодрома.
РСУ 35 предназначена для обеспечения управляемого полета крылатого СВКК с момента отделения от ВПС многоразового ПОС/БОС 1 на внеатмосферном участке полета до входа в плотные слои атмосферы и на начальном этапе атмосферного полета. РСУ 35 выполнена в модульном исполнении, что обеспечивает автономность сборки, межполетного обслуживания и заправки компонентами топлива.
ЧКСУ предназначена для создания тяги, необходимой для возвратного полета ВПС с РОС 3 или ПОС/БОС 1 в зону плавучего космодрома, выполнения посадочных маневров и осуществления вертикальной посадки. ЧКСУ включает в себя:
- в двух НКГ 23 и двух ПКГ 24 имеется четыре КТРД с отбором мощности от их валов на привод в ЧВНС-Х4 четырех толкающих ПНВ 44-47;
- управление вектором тяги круглых сопел 50 КТРД в НКГ 23 и ПКГ 24 ее ВПС;
- топливную систему с топливными баками, трубопроводами и агрегатами;
- элементы системы управления двигательной установкой.
Основные агрегаты его ЧКСУ расположены в носовом отсеке 29 и КТРД в НКГ 23 и ПКГ 24. В состав топливной системы ЧКСУ входят основные баки, расположенные в межбаковом отсеке корпусов 2 ВПС, а также расходный и балансировочный баки (на фиг.1-4 не показано), которые расположены в носовом отсеке 29. Балансировочный бак предназначен для изменения центровки ВПС с РОС 3 и/или ПОС/БОС 1 в составе СВКК и в зависимости от требований продольной его балансировки на различных скоростях полета. Воздух в двигатели поступает через автономные лобовые воздухозаборники в НКГ 23 и ПКГ 24. На пассивных участках траектории полета воздухозаборники закрыты в НКГ 23 и ПКГ 24 выдвижением центрального конусного тела 33, который затем втягивается перед запуском их КТРД.
Многоэлементный СВКК эксплуатируется следующим образом.
После стыковки в техническом комплексе ВПС 2 с РОС 3 и ПОС/БОС 1 тяжелого класса и присоединения в пакет трех СВКК их узлами стыковки 51 и соответствующего взлетного их веса доставляется на стартовое устройство, где производится его заправка и проводятся предстартовые проверки. Перед стартом и после выдвижения заслонок 12 в гондолах 10 и конусного тела 33 каждого ЛВЗ в НКГ 23 и ПКГ 24 закрывается их вход для защиты от воздействия набегающего потока воздуха внутреннего объема их криогенных и КТРДФ, и КТРД в зоне повышенных скоростных напоров. Затем в каждом СВКК запускаются КМРД 34 в ВПС 2 и КМРД 18 в РОС 3 и начинается их полет по заданной программе. После выработки топлива в их ВПС 2 и РОС 3 происходит выключение их КМРД 34 и 18. Одновременно обеспечивается безударное отделение второй ступени- ПОС/БОС 1 от центрального СВКК после того как два крайних СВКК в пакете отделятся от центрального. Затем ПОС/БОС 1 отделяется от его ВПС 2 с РОС 3 и продолжает дальнейший полет, который завершается выведением на орбиту полезного груза. Полет многоразовых элементов СВКК после отделения осуществляется в автоматическом режиме. Соотношением между объемом топливных баков ПОС/БОС 1 и объемом топливных баков ВПС 2 с РОС 3 в их СВКК в пределах от 0,6 до 1, т.к. введено ограничение по распределению масс в их составе, при выполнении которого в момент разделения их скорость не будет превышать 1600 м/с, а высота 56 км. После разделения трех СВКК они продолжают двигаться по баллистической траектории. При этом вследствие уменьшения скоростных напоров требуемая ориентация их ВПС 2 обеспечивается работой реактивной системы их стабилизации 35. На нисходящей части их траектории выставляется ВПС 2 на угол атаки, обеспечивающий оптимальный режим торможения с учетом ограничений по величине перегрузок. По мере нарастания скоростных напоров угол атаки изменяется, и в работу включаются аэродинамические органы управления 21, 27 и 28 их ВПС 2 с РОС 3. В то же время ограничение скорости и высоты полета каждого СВКК в момент разделения, позволяет обеспечить необходимый тепловой режим их ВПС 2 и носового отсека 29 за счет использования в наиболее теплонапряженных местах обшивки из стальных или титановых сплавов. Благодаря этому достигается экономия массы, исключается необходимость послеполетного обслуживания обшивки. Кроме того, в многоразовой ВПС 2 «экранируются» также и его КТРД в каждой и НКГ 23, и ПКГ 24, что позволяет обеспечить им приемлемый тепловой режим без дополнительной теплозащиты.
На высотах порядка 22-23 км производится отключение стабилизации РСУ 35 и в дальнейшем управление полетом каждым ВПС 2 осуществляется с помощью аэродинамических органов их управления 21, 27 и 28. При достижении высоты около 6 км и скорости 750…800 км/час после втягивания конусного тела 33 каждого лобового воздухозаборника НКГ 23 и ПКГ 24 и запускаются их КТРД, получающие авиатопливо из баков. К этому моменту расстояние от возвращаемых СВКК до плавучего космодрома будет составлять не более 300…330 км. Дальнейший их полет в направлении космодрома морского старта, включая вертикальную посадку на хвост, также осуществляется в автоматическом режиме, с возможностью перехода на ручное управление пилотом-оператором с командного пункта плавучего аэродрома.
После подлета каждого СВКК к плавучему космодрому при горизонтальном положении его корпуса раскладываются и фиксируются его ППШ 43 (см. фиг. 3) и два левых 44-45 и два правых 46-47 толкающих ПНВ подключаются к трансмиссии их муфтами сцепления и обеспечивают подъемную силу с реактивной тягой КТРД и центральным 18 КМРД в РОС 3. Затем ВПС 2 с БОС 1 конвертируются с реактивного самолета в турбовинтовентиляторный самолет ВВП с ЧВНС-Х4 и обеспечивается автоматический набор высоты до 1000 м для осуществления переходного режима полета и последующего пикирования над посадочной площадкой и выполнения маневра «свечка». После чего корпус ВПС 2 приводится в вертикальное положение и ПНВ 44-47 с реактивной тягой КТРД и центрального 18 КМРД в БОС 1 обеспечивают создание необходимой подъемной их тяги, но и достижение заданной скорости подъема для выполнения режима зависания с поворотом козырьков 49, которые создают аэродинамические силы торможения при последующей вертикальной посадке на хвост с заданной скоростью снижения. Управление движением СВКК на всех этапах полета осуществляется навигационным пилотажным комплексом, входящим в состав бортовой системы управления, которая обеспечивает прием и обработку информации от навигационных спутников и вырабатывает соответствующие сигналы управления. Полет заканчивается вертикальной посадкой на площадки стартово-посадочного комплекса плавучего космодрома и выключением КТРД и КМРД. После чего их ВПС 2 с БОС 1 доставляется в технический комплекс, где производится их послеполетное обслуживание, затем ВПС 2 с РОС 3 перемещается в зону сборки СВКК и для стыковки с ПОС/БОС 1, но и подготовки его к последующему применению и для выполнения следующей космической миссии.
Благодаря применению многоэлементного СВКК обеспечивается увеличение в стартовой массе БОС доли массы полезного груза на 26-35%, чем в сравнении с МРБ Falcon 9, но и достигается благодаря увеличению ракетного топлива в БОС при использовании ВПС с БОС легкого класса в УкСТ (см. фиг. 3) и совершении полета без угла атаки. Этому способствует также ограничение на распределение масс в СВКК с УкСТ, благодаря которому ограничивается скорость ВПС в момент разделения, за счет чего уменьшается расстояние до места посадки на плавучем космодроме, которое ВПС преодолевает в режиме самолетного полета, что ведет к снижению массы топлива для КТРД. Кроме того, благодаря экранированию Л-образным корпусом ВПС выводимого БОС без системы спасания снижаются тепловые нагрузки на него, за счет чего экономится масса, расходуемая на обеспечение требуемого теплового режима. Одновременно, за счет того, что дельтовидный корпус БОС размещен в Λ-образном корпусе ВПС, что также предопределяет уменьшение в 2,35 раза высоты СВКК с УкСТ на его старте/посадке в сравнении с тандемной схемой сопоставимого космоплана ОК-М и РН «Зенит» проекта НПО «Молния».
Все сказанное выше увеличивает экономический эффект от применения многоразовой ВПС, использующей для вертикальной посадки ПНВ с их диаметром D=8,5 м и четыре КТРД типа РД-33КФ с УВТ и тягой по 5400 кгс для возвращаемой массы 44,44 тонн ВПС и ее приведения на посадочную площадку плавучего космодрома, а не на плавающую платформу, расположенную на удалении 546 км от места старта, как у ускорителя Falcon 9, но и с применением КТРД и их соответствующим расходом авиатоплива до 6400 кг на перелет 546 км и вертикальную посадку, что почти в 9,4 раза экономичнее, чем у сопоставимого ускорителя Falcon 9 с его ЖРД при выполнении вертикальной посадки. Этому же способствует использование как для эксплуатации ВПС и технологии короткого взлета-посадки (КВП) при горизонтальном положении ее корпуса на аэродромных полосах, но и регулируемо-запираемых ЛВЗ при их работе вплоть до высоты 22-23 км и скорости порядка 2,5Мв КТРД с их тягой 21,6 тс, которая полностью компенсирует массы всех ППШ и их ПНВ с трансмиссией.
Агрегаты и элементы конструкции предлагаемого многоэлементного СВКК являются широко используемыми в ракетно-космической и авиационной технике. Поэтому заявляемое изобретение может быть осуществлено на ракетно-космических и авиационных заводах с использованием современных материалов и технологий. Если техническое решение с ЧКСУ на базе КТРД и их ПНВ применить в создании многоразового СВКК и объединить для использования в системе «Морской Старт», то получится перспективный результат и гораздо более безопасный и экономически предпочтительный, чем МРБ типа «Falcon 9», который с ракетно-динамическим способом его возвращения на место старта израсходует 30 тонн ракетного топлива, что в конечном итоге уменьшает максимально выводимый полезный груз РН на 30-40%, а использование в атмосфере ВПС в качестве вертикально-посадочного модуля возвращаемого БОС/ПОС, позволит увеличить на 30% массу возвратного груза с орбиты.
Поэтому целесообразно освоить более компактные, а значит, и куда более дешевые в эксплуатации унифицированные беспилотные орбитальные корабли семейства, например, БОС: БОС-Л, БОС-С и БОС-Т соответственно легкого, среднего и тяжелого класса. Поскольку, они должны будут выводиться в космос с помощью унифицированного многоэлементного СВКК в соответствующем количественном составе ВПС и РОС, то многоразовый БОС-Л, имея массу всего 15 т при размахе ВРК 9,3 м и длине корпуса 15 м, будет выводить в космос до 3,5 т полезного груза. Многоразовый БОС-С если будет вдвое тяжелее БОС-Л, то, имея массу 32 т при размахе ВРК 11,6 м и длине корпуса 18,8 м, будет выводить в космос до 10 т полезного груза. Многоразовый БОС-Т если будет вдвое тяжелее БОС-С, то, имея массу 64 т при размахе ВРК 14,5, м и длине корпуса 23,5 м, будет выводить в космос до 20 т полезного груза. Кроме того, по тандемной (укороченной) схеме с СВКК в составе с БОС-Л длина его ВПС при вертикальном старте составит 25 м, а с системой спасания при запуске БОС-Л, БОС-С и БОС-Т в тандемной (удлиненной) схеме с СВКК длина его увеличится для сопоставимых условий до 44 м, 56 м и 71 м соответственно.
Для чего, с учетом опыта НПО «Молния» в разработке орбитальных кораблей (ОК) типа ОК-М с взлетной его массой 15 т, а также того, что концепция СВКК является масштабируемой, то для отработки технологии его ВПС целесообразно создать демонстратор - беспилотный самолет ВВП (БСВВП). Палубный БСВВП-2,5 исполнения ЧВНС-Х4 с ПСК, задним ХОК и четырьмя ТРД типа РД-1700 с УВТ и тягой по 1700 кгс, приводящими 44% их мощности четыре ПНВ с их диаметром D=3,6 м или создающими реактивную тягу с подъемными или убранными ПНВ в ниши его ВОК, представляет собой БСВВП-авианосец ВВП с дальностью полета 1580/2980 км при выполнении технологии ВВП/КВП и взлетным весом 12,7 т, несущий в Λ-образном корпусе один возвращаемый «ведомый» БПЛА-ракетоносец с его весом 2,5 т и ПКР Х-35.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| АВИАЦИОННАЯ КОРАБЕЛЬНО-АРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2753894C1 |
| СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНО-ПОРАЖАЮЩАЯ | 2020 |
|
RU2753779C1 |
| УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2020 |
|
RU2743262C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2823932C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816404C1 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
Изобретение относится к ракетно-космической технике, в частности к конструкциям многоразовых разгонных систем. Предлагается составной воздушно-космический комплекс (СВКК) с возвращаемыми первой и второй ступенями (ВПС и ВВС), причем ВВС имеет дельтовидный несущий корпус и состыкована в Λ-образном корпусе ВПС. ВПС имеет в гондолах корневых частей первого стреловидного крыла турбореактивные двигатели с лобовыми воздухозаборниками и отбором мощности на привод четырех несущих винтов (НВ), смонтированных при равном удалении в плане осей их вращения от центра масс на концах их поворотных профилированных штанг. Штанги отклоняются от бортов корпуса ВПС на угол 88° в вертикальной плоскости консолей его заднего Х-образного крыла при виде сзади и на узлах поворота, установленных спереди центра масс. НВ используются по толкающей схеме для посадки на месте старта в режиме полета ВПС как турбовинтовентиляторного самолета, вертикально садящегося на хвост. Обеспечивается увеличение доли массы полезного груза в стартовой массе СВКК, уменьшение высоты СВКК на стартовом столе, возможность возврата на значительные расстояния к месту морского старта с вертикальной посадкой на площадку малых размеров. 2 з.п. ф-лы, 4 ил. 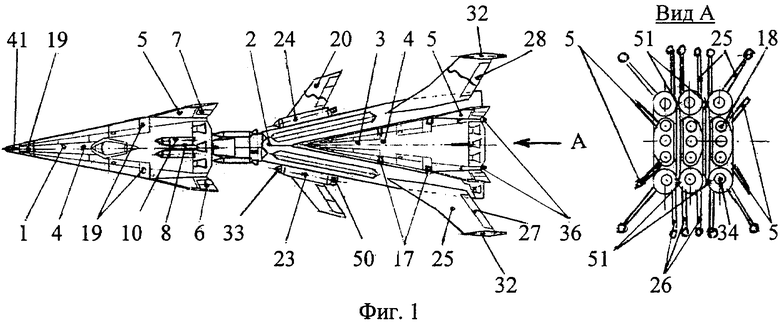
1. Составной воздушно-космический комплекс (СВКК), включающий в себя вторую ступень и ускоритель первой ступени (УПС) с ракетными двигателями (РД) и двигателями управления, которые соединены между собой в виде крылатой ракеты с низко расположенным крылом, смонтированным на корпусе УПС, имеющий на крыле кили и турбореактивные двигатели (ТРД) силовой установки (СУ), но и посадочное устройство, отличающийся тем, что он содержит в укороченной или удлиненной схеме тандем (УкСТ или УдСТ) возвращаемые с более чем одним кислородно-метановым РД (КМРД) первую и вторую ступени (ВПС и ВВС), последняя из них представляет собой разгонный или беспилотный либо пилотируемый орбитальный самолет (РОС или БОС либо ПОС) с использованием на старте в межкорпусном пространстве ВПС или сверху ВПС с системой спасания, либо в их комбинации соответственно, выполненный по схеме "бесхвостка" с несущим корпусом дельтовидной формы в плане и тепловым экранированием по округлым бокам и на нижней его стороне, но и поверхностей и кромок высокорасположенного крыла (ВРК), имеющего поперечное V с углом ϕ=+25° и складывающиеся стреловидные консоли вверх на угол 45° и 90° и их размещением от горизонтали соответственно под углами 70° и 115°, а по обе стороны от оси симметрии или киля в кормовых гондолах сверху РОС или ПОС, БОС смонтированы два ТРД форсажных (ТРДФ), используемых в атмосфере с лобовыми их воздухозаборниками (ЛВЗ) при безфорсажном/форсажном режиме самолетного полета с обеспечением соответствующей тяговооруженности не менее 0,48/0,81 от возвращаемой массы ПОС, БОС как одними ТРДФ или центральным КМРД из их трех либо в их комбинации при горизонтальном/вертикальном положении его корпуса, при этом с межкорпусным Λ-образным пространством ВПС выполнена по аэродинамической схеме «тандем» с задним Х-образным крылом (ХОК) при виде сзади, имеющим разнесенные консоли, смонтированные на каждом корпусе, отклонены наружу под углом 45°-60° от плоскости симметрии и снабжены в гондолах корневых частей переднего стреловидного крыла (ПСК) более чем одним упомянутым ТРД, которые установлены и в двух подкрыльных, и двух надкрыльных гондолах (ПКГ и НКГ), смонтированных вдоль каждого корпуса ВПС с их ЛВЗ, сконфигурированными для дозвуковой и сверхзвуковой работы, но и отбором мощности на привод воздушных несущих винтов (НВ), используемых в атмосфере совместно с ТРД для возвращаемого горизонтального крейсерского полета, но и при выполнении технологии вертикального взлета-посадки (ВВП) в четырехвинтовой несущей схеме (ЧВНС), равноудаленных в плане от центра масс, смонтированных на концах поворотных профилированных штанг (ППШ), отклоняющихся вперед и назад по полету от бортов корпуса ВПС на угол 84°-88° в вертикальной плоскости, размещенной в плоскости консолей ХОК и на их узлах поворота, установленных спереди центра масс, используемых по толкающей схеме для автоматической вертикальной посадки на месте старта при вращающихся в одном направлении диагонально расположенных НВ, после раскладывания их четырех ППШ, выполненных как со свободным их вращением при прохождении их лопастей соответственно перед корпусом ВПС и консолями его ПСК, так и в виде одно- либо двухлопастных НВ (ОНВ либо ДНВ) соответственно с профилированными противовесами либо с равно- или разновеликими лопастями, меньшие из последних, образующие сбалансированные полуторалопастные НВ (ПНВ), имеют радиус, определяемый из соотношения: Rмен=(1/2…1/3)×Rбол, м (где Rбол - радиус большей лопасти), но и с жестким креплением их лопастей, без автомата их перекоса, возможностью изменения общего их шага, автоматической установки их лопастей в положение их авторотации, но и выполнены таким образом, что после их отключения от трансмиссии лопасти их ПНВ фиксируются вдоль соответствующих ППШ, которые в сложенном их положении устанавливаются вдоль бортов каждого корпуса ВПС и укладываются в соответствующие ниши внешних обтекателей корпусов (ВОК) с автоматически открывающимися продольными створками, но и размещаются меньшими лопастями ПНВ наружу от конца ППШ при виде сбоку, причем в четырехдвигательной комбинированной СУ (ЧКСУ) каждое круглое сопло ее ТРД снабжено системой управления вектора тяги (УВТ), создающей синхронную маршевую, но и синфазно или дифференциально раздельно отклоняемую на угол 20° от горизонтали/вертикали реактивную тягу, направленную только соответственно вверх и вниз/вперед и назад от средней линии ПСК для выполнения при горизонтальном/вертикальном положении корпуса ВПС его полета в конфигурации реактивного самолета/турбовинтовентиляторного самолета ВВП, но и изменения балансировки соответственно по тангажу, или крену/тангажу, или рысканью, при этом внешние борта носовой части каждого Λ-образного корпуса ВПС в местах сбоку реактивных сопел каждого ТРД снабжены термостойкими щитками или имеют термостойкое покрытие, причем среднерасположенное ПСК, содержащее вдоль всего его размаха флаппероны и внутренние закрылки, имеет площадь, составляющую 41-42% от общей площади двух крыльев, обеспечивающих при возвращении одного ВПС в атмосфере как самолета удельную на них нагрузку 360 кг/м2 и их малом удлинении (λ) λ=1,84 и λ=1,65 соответственно у ПСК и ХОК, при этом консоли ХОК, имея переменную стреловидность, содержат на их концах обтекатели с амортизационными стойками четырехопорного неубирающегося шасси и небольшими самоустанавливающимися колесами для выполнения в полетной конфигурации турбовинтовентиляторного самолета вертикальной посадки на хвост, причем нижняя часть каждого обтекателя шасси, вынесенного с законцовками консолей ХОК назад по полету от сопел реактивных двигателей ВПС, снабжена в продолжение его наружного диаметра полусферическими левой и правой створками, которые, смыкаясь в вертикальной плоскости, размещенной параллельно плоскости симметрии, закрывают небольшое колесо, при этом выдвижная заслонка каждого ЛВЗ, смонтированная на корпусе и ВВС, и ВПС перед входом ЛВЗ, способна отклоняться в обоих направлениях вверх/вниз для соответствующего полного закрывания/открывания воздушного входа от аэродинамического потока, причем силовая связь выводимого ПОС/БОС, например, с ВПС и состыкованным ее РОС в СВКК с УдСТ обеспечивается через переходный отсек, на котором с помощью сбрасываемых пилонов смонтированы четыре твердотопливных ускорителя системы спасания, увеличивающих мощность СВКК в штатном полете и создающих экстренное отделение и управляемый увод ПОС/БОС при аварии.
2. СВКК по п. 1, отличающийся тем, что для обеспечения работы упомянутых ТРД на высоте полета и ВВС, и ВПС до и более 22-23 км в передней части каждого упомянутого их ЛВЗ с их упомянутой выдвижной заслонкой, представляющей собой центральное конусное тело, выполненное в виде подвижного носового обтекателя, способного втягиваться и выдвигаться в обоих направлениях назад и вперед для соответствующего требуемого открывания и до полного закрывания воздушного входа ЛВЗ от аэродинамического потока, при этом на режимах ВВП и зависания в упомянутой ЧКСУ левая и правая пары упомянутых ТРД имеют для отбора части 40…44% их мощности через муфты их сцепления передние выводы их валов, проложенных в носовой части корпуса ВПС и вращательно связанных с их угловыми в вертикальной плоскости редукторами, имеющими выходные валы, которые вращательно связывают каждую пару ТРД с левым и правым Т-образными в плане объединительными редукторами, которые смонтированы в носовой части упомянутого корпуса ВПС, имеют как связывающий их синхронизирующий вал, так и боковые выходные валы, каждый из которых передает распределенную мощность каждому угловому в плане редуктору, который интегрирован с узлом поворота упомянутой каждой ППШ и в свою очередь выходным его валом, проложенным в носке ППШ, передает крутящий момент угловому в вертикальной плоскости редуктору соответствующего ПНВ, конструкция лопастей которого предопределяет уменьшение длины валов трансмиссии, упомянутых боковых ВОК и их створок, причем на режимах ВВП и зависания упомянутого ВПС с его ЧВНС-Х4 управление по крену осуществляется посредством изменения шага двух левых и двух правых ПНВ, при этом на режимах ВВП и зависания ВПС при удельной нагрузке на мощность его упомянутой ЧКСУ, составляющей ρN=1,3-1,65 кг/л.с., упомянутые ТРД, обеспечивая подъемную реактивную тягу, составляющую 16-20% от общей подъемной тяги, выполнен с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ТРД, оснащенную последовательно соединенными блоком приведения давления в компрессоре их ТРД, блоком формирования заданного значения частоты вращения и углового положения лопаток их турбин и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ТРД и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ЧВНС-Х4, составляющей с учетом потерь от обдува самих ППШ ρВТ=1,25, включает режимы работы ТРД как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной их мощности на привод упомянутых ПНВ соответственно, например, в упомянутой ЧКСУ как от четырех работающих ТРД, так и от трех из работающих ТРД с автоматическим выравниванием и равным перераспределением оставшейся мощности между ПНВ при отказе соответствующего ТРД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ТРД, которые при удельной вертикальной тяговооруженности в ЧКСУ, составляющей ρВТ=1,25, обеспечат режим аварийной вертикальной посадки в течение 0,5 мин, причем для выполнения перелета от предприятия-изготовителя ВПС до места старта, например, плавучего космодрома он снабжен интегрированной системой управления, оснащенной связью с системой глобального позиционирования и системой командования и управления силовой установкой с электродистанционной системой управления (ЭД-СУ), но и выполнен с возможностью дистанционного управления оператором как с командного пункта на земле или плавучего космодрома, так и при визуальном его контроле с борта рядом летящего самолета-топливозаправщика, а также оснащен в межбаковой части каждого корпуса ВПС основным топливным баком, но и выдвижной системой дозаправки авиатопливом в полете, смонтированной сверху на носовой части корпуса ВПС и слева от продольной его оси, при этом в СВКК с упомянутой УкСТ при размещении РОС, ПОС/БОС в межкорпусном Λ-образном пространстве ВПС на боковых сторонах их корпусов и ВПС имеются узлы стыковки/расстыковки соответственно на внешних и внутренних бортах сопрягающихся корпусов, а каждый СВКК с УкСТ на носовой и кормовой частях ВПС снизу или снизу и сверху упомянутого Λ-образного корпуса имеет узлы стыковки двух или трех таких СВКК, позволяющие их использовать в соответствующих схемах после складывания нижних или в центральном СВКК всех консолей и ХОК их ВПС, и ВРК их БОС, которые отклоняются наружу и фиксируются перпендикулярно плоскости симметрии, причем в одном либо в состыкованных двух или трех СВКК с УкСТ упомянутые все их КМРД одного ВПС с БОС либо двух ВПС с РОС и БОС или трех ВПС с двумя РОС и БОС работают на топливе из своих баков, выводят БОС на орбиту высотой 55-56 км при скорости 2 км/с при одновременной перекачке топлива из разгонных ВПС и РОС в баки выводимого на орбиту БОС, при этом при горизонтальном расположении корпуса ВПС для выполнения взлета-посадки в режиме его полета как реактивного самолета два обтекателя шасси нижних сложенных на угол 20°-35° его консолей ХОК снабжены на их законцовках узлами поворота, отклоняющими в вертикальной плоскости вниз и обратно вверх на угол 90° наравне с тем, что корпус ВПС снабжен убирающимися основными стойками колесного шасси велосипедного типа.
3. СВКК по любому из пп. 1, 2, отличающийся тем, что после выполнения миссии и возврата, например, БОС в режиме самолетного полета в атмосфере имеет возможность при его посадке использовать убирающееся колесное шасси или пристыковываться к ВПС при горизонтальном их совместном полете с использованием гибких креплений между ними с их системами автоматической стыковки/расстыковки для выполнения соответственно маневров приведения на посадочную полосу аэродрома с горизонтальной посадкой и использованием несущих аэродинамических поверхностей с тормозной парашютной системой БОС или в район стартового комплекса, например, системы морского старта после осуществления состыковки БОС с ВПС для их совместной вертикальной посадки на более чем одну площадку, смонтированную с плавучим космодромом или вынесенную отдельно от него, при этом по оси симметрии на конце носовой части Л-образного корпуса ВПС смонтирована грузовая лебедка с автоматическим управлением и тросом, имеющим на его конце конусный ловитель с захватом, позволяющим на расстоянии, кратно превышающем длину корпуса ВПС, совершить безопасный подлет БОС к нему в полетной конфигурации самолета и выполнить после выравнивания скоростей их полета предварительное пристыковывание посредством гибкой системы крепления с ответной частью, размещенной на конце носовой выдвижной штанги БОС, причем после предварительного пристыковывания БОС к ВПС, который грузовой лебедкой подтягивает к основному узлу стыковки/расстыковки жесткой системы захвата и крепления с автоматическим соблюдением каждым автопилотом БОС и ВПС соосности двух узлов стыковки жесткой системы захвата и крепления, но и поступательного подлета равновеликого с требуемым при этом подтягиванием БОС вдоль оси ВПС грузовой лебедкой к основному узлу жесткой системы его крепления, который, взаимодействуя с ответной частью узла жесткой системы крепления БОС, пристыковываясь наравне с боковыми узлами стыковки ВПС и БОС, обеспечивает жесткую систему крепления с одновременным складыванием в БОС консолей ВРК и выполнение совместно-состыкованного горизонтального полета, при этом состыкованные ВПС с легким БОС конвертируются в турбовинтовентиляторный составной самолет ВВП с ЧВНС-Х4 для обеспечения автоматического набора высоты до 1000 м и осуществления переходного режима полета с последующим пикированием над посадочной площадкой, например, плавучего аэродрома и выполнения маневра «свечка» и когда А-образный корпус ВПС приводится в вертикальное положение и его упомянутые ПНВ и их криогенные и ТРД в ВПС, и ТРДФ в БОС или только центральный КМРД в БОС либо в их комбинации создают соответствующие подъемную силу и бесфорсажную и форсажную реактивную тяги, но и достижение заданной скорости подъема с выполнением режима зависания и последующей вертикальной посадки на хвост с заданной скоростью снижения, причем к упомянутому шасси на ХОК ВПС кормовые обтекатели корпусов и РОС, и ПОС/БОС имеют раскладываемые или выдвижные четыре опоры для совместной их посадки на хвост с обеспечением вертикального их положения.
| US 20190375505 A1, 12.12.2019 | |||
| РАЗГОННЫЙ САМОЛЕТ-НОСИТЕЛЬ (ВАРИАНТЫ) | 2019 |
|
RU2715816C1 |
| МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ | 2019 |
|
RU2712720C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РЕЗЬБОВОГО СОЕДИНЕНИЯ И СНИЖЕНИЯ НАГРУЗКИ НА ЕГО ВИТКИ У ОПОРНОГО ТОРЦА ГАЙКИ | 2016 |
|
RU2618644C1 |
| МНОГОРАЗОВЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-РАЗГОНЩИК | 2002 |
|
RU2211784C2 |

