Настоящее изобретение относится к втягивающемуся покрывающему устройству, такому как навес или тент, имеющему блок управления для управления его вытягиванием и втягиванием. Изобретение также относится к системе управления таким устройством и способу управления таким устройством.
Навесы или тенты часто используются, например, для открытых ресторанов или в частных садах, чтобы покрывать открытые участки и обеспечивать укрытие для людей под ними, обеспечивая, таким образом, защиту от солнца, дождя и т.п. Из уровня техники известно множество покрывающих устройств. Например, некоторые тенты устраиваются на стене здания и имеют складные кронштейны, которые могут вытягиваться из здания, когда нужно развернуть тент. Другие покрывающие системы имеют покрывающее полотно, прикрепленное к подвижным тросам, которыми управляют для вытягивания или втягивания полотна.
Желательно, чтобы тенты и навесы могли легко вытягиваться и втягиваться, в то же время натянутый тент должен быть достаточно прочным, чтобы выдерживать ветровую нагрузку и т.д. Главной проблемой со всеми этими типами покрытий является обеспечение достаточного натяжения в покрытии, так чтобы тент не раскачивался чрезмерно или не хлопал на ветру. Ранее натяжение обычно обеспечивалось с помощью пружин, так чтобы, когда покрытие растягивалось больше, пружинами создавалось большее натяжение. Однако предел натяжения, которое может быть обеспечено пружинами, довольно низок и меняется с длиной растягиваемого покрытия. Также пружины теряют свою упругость со временем или если они растянуты слишком сильно. Этот предел натяжения являлся главным фактором в ограничении размеров (как по ширине, так и по длине) таких покрывающих систем. Однако для многих приложений желательны большие покрывающие системы, например, для обеспечения защиты от дождя и солнца над большими внутренними дворами, теннисными кортами или плавательными бассейнами и для создания комфортных условий при их использовании.
Более ранняя патентная заявка автора настоящего изобретения, GB2421522, описывает покрывающую систему нового типа, в которой передняя часть втягивающегося покрытия крепится к ряду продольных тросов через зажимные системы, которые съемным образом крепятся к тросам. Чтобы растянуть покрытие, зажимные системы освобождаются и тянутся вдоль тросов, таким образом растягивая покрытие по отношению к тросам. Когда покрытие растянуто до требуемого положения, зажимные системы прижимаются к тросам, таким образом, поддерживая покрытие в развернутом положении под натяжением. Дальнейшее натяжение может быть получено, например, путем оттягивания назад тыльной части покрытия в направлении втягивания. Таким образом, сила натяжения может быть легко приложена к покрытию и ограничивается только прочностью зажимной системы, тросов и самого покрытия в отличие от пружин в известных конструкциях. Такая система позволяет разворачивать большие покрытия при более высоких натяжениях.
Как описано в документе GB2421522, зажимные системы, а также накопительный валок, на котором хранится покрытие, могут быть моторизованы, чтобы сделать возможным автоматическое развертывание. Однако зажимные системы подвергаются воздействию внешних сил, таких как ветер и другие препятствия перемещению, такие как грязь на натяжных тросах. Силы, действующие на каждый зажимной блок, могут отличаться, таким образом, заставляя их двигаться с разными скоростями, несмотря на одинаковые приводные усилия, прикладываемые двигателями. Кроме того, зажимные системы могут проскальзывать вдоль тросов (если они, например, мокрые или засаленные) неодинаковым образом. Также двигатели могут создавать разные приводные силы, например, благодаря допускам на изготовление, или колебания в питании могут заставить один двигатель временно тянуть сильнее или остановиться. Порыв ветра на одной стороне может создать сопротивление на одном двигателе, и разница в упругости полотна покрытия от одной стороны к другой может создать разные силы, которые прикладываются к двигателям на разных сторонах покрытия. Это может создать неуравновешенные силы тяги, которые прикладываются к покрытию, которое, следовательно, может разворачиваться или втягиваться с перекосом. Это делает покрытие не только менее эффективным, но может разрушить его. Эти недостатки особенно проявляются для больших покрытий, в которых зажимные блоки должны проходить большие расстояния и поддерживать более тяжелый вес. Кроме того, в случае, когда для втягивания не используется двигатель, чтобы втягивать покрытие необходимо использовать, например, подпружинивающий механизм. Когда используется большое покрытие, требуется значительная втягивающая сила, которая может быть недоступной.
При втягивании покрытия с неуравновешенными силами на любой стороне покрытия возникает дополнительная проблема: при неравных силах покрытие может перекоситься, и когда оно втягивается на накопительный валик, оно не может наматываться прямо. Другими словами, когда покрытие наматывается на накопительный валик, оно может смещаться в поперечном направлении в одну или в другую сторону вдоль валика. В таких случаях, когда покрытие наматывается, оно смещается постепенно все дальше вдоль накопительного валика в осевом направлении. Также неравномерное натяжение может привести к складкам, образующимся в покрытии. Когда эти складки наматываются на покрытие, они становятся загибами и сгибами в полотне покрытия. При высоких натяжениях в таких тентах существует повышенная опасность разрыва полотна в таких слабых местах. Как только такие искажения появились в покрытии, они могут продолжать существовать неограниченно и усугубляться каждый раз, когда покрытие разворачивается и убирается.
Как только покрытие развернуто, даже когда зажимы зажаты на месте, внешние силы, такие как ветер, могут вызвать их перемещение, результатом чего будет потеря натяжения в покрытии. Когда покрытие поднимается значительно над землей, ветер проходит как над покрытием, так и под ним, и покрытие может легко "поймать" ветер и подвергнуться воздействию больших сил.
Согласно одному аспекту изобретения предложено втягивающееся покрывающее устройство, которое содержит покрытие, выполненное с возможностью вытягивания и втягивания, и в котором имеется первый двигатель, выполненный с возможностью вытягивания покрытия, второй двигатель, выполненный с возможностью втягивания покрытия, и блок управления, выполненный с возможностью управления первым и вторым двигателями.
Таким образом, согласно изобретению первый двигатель необходим только для обеспечения момента, достаточного для вытягивания покрытия, а второй двигатель необходим только для обеспечения момента, достаточного для его втягивания.
В другом аспекте первый двигатель крепится к покрытию.
Хотя двигатель, не приводящий в действие, может работать на холостом ходу, предпочтительно оба двигателя остаются в зацеплении во время вытягивания и втягивания. Таким образом ими можно управлять, чтобы предотвратить провисание покрытия во время вытягивания или втягивания. Наиболее предпочтительно, они координируются или синхронизируются, так чтобы поддерживать натяжение в покрытии в пределах заданных значений. Это может быть достигнуто управлением двигателями так, чтобы к покрытию прикладывалось заданное усилие натяжения. Под координацией или синхронизацией здесь понимается, что двигатели работают с поддержанием равномерного натяжения в покрытии. Если обнаруживается расхождение, скорость одного или более двигателей может регулироваться, чтобы компенсировать и вернуть натяжение обратно к норме.
Как отмечено выше, если не поддерживать правильное натяжение в покрытии, могут развиться сгибы и складки, которые являются проблемой при сматывании или разматывании покрытия с накопительного валика. Серьезность таких проблем зависит от размеров покрытия. Для маленьких тентов, известных из уровня техники, покрытия не так велики, чтобы складки в покрытии были серьезной проблемой. Однако для гораздо больших покрытиях, к которым относится это изобретение, имеется гораздо большее количество полотна покрытия, которое нужно наматывать, и должно прикладываться много большее натяжение к покрытию во время разворачивания и втягивания. Небольшие изменения в натяжении усиливаются, и эффекты являются намного более серьезными и, следовательно, в больших тентах важно не только обеспечить и поддерживать натяжение при развертывании и втягивании, но также обеспечить равномерность натяжения на обеих сторонах покрытия.
Покрывающее устройство предпочтительно является навесом или тентом, и в одной предпочтительной конструкции покрытие выполнено с возможностью развертывания вдоль упругих тросов. Такие конструкции не требуют жесткого продольного поддерживающего каркаса. Вес покрытия полностью поддерживается растяжками. Двигатель предпочтительно выполнен с возможностью перемещения одного или более концевых блоков вдоль одного или более таких тросов, причем каждый концевой блок содержит элемент сцепления для подвижного взаимодействия передней части покрытия с тросом. В особенно предпочтительном варианте каждый элемент сцепления содержит по меньшей мере один ролик, и более предпочтительно, два ролика, образующие роликовую систему. Роликовая система предпочтительно присоединена к тросу, причем трос оборачивается сначала вокруг одного ролика в направлении против часовой стрелки и затем вокруг второго ролика в направлении по часовой стрелке.
Может использоваться один двигатель, вал которого расположен с возможностью перемещения роликов на тросах. Этот двигатель может вращать ролики независимо с разными скоростями с помощью дифференциального зубчатого механизма.
Однако особенно предпочтительно использование группы первых двигателей, наиболее предпочтительно одного для каждого упругого троса. В целом двигатель, работающий с концевым блоком, расположен вместе с концевым блоком и перемещается вместе с ним.
В другом варианте выполнения изобретения покрытие развертывается с помощью работающих на растяжение тросов, присоединенных на одном конце к передним углам покрытия (к передней кромке), а на другом конце к опорам, например к опорным стойкам. Эти тросы расходятся в стороны, так что они оказываются дальше друг от друга в направлении развертывания покрытия. В этом варианте в районе опор находятся двигатели для вращения лебедок, которые наматывают работающие на растяжение тросы, вытягивая, таким образом, покрытие в направлении развертывания. Хотя может использоваться один двигатель для вращения двух лебедок с разными скоростями через дифференциальный зубчатый механизм, предпочтительно использование отдельных двигателей, по одному на каждый трос. Двигатели предпочтительно выполнены с возможностью работы с отличающимися друг от друга скоростями и/или моментами и с независимым управлением. В одном варианте выполнения один первый двигатель является ведущим, а другие первые двигатели являются по отношению к нему ведомыми. Таким образом, управляющий блок может непосредственно управлять вторым двигателем и одним первым двигателем и, кроме того, содержать локальный ведущий блок управления, связанный с первым (ведущим) двигателем, который управляет первыми (ведомыми) двигателями. Предпочтительно блок управления, кроме того, содержит локальный ведомый блок управления, связанный с каждым ведомым двигателем, для связи с локальным ведущим блоком управления и управления перемещением при получении команды извне. Блок управления можно рассматривать как систему управления, содержащую главный блок управления перемещением для управления вторым двигателем, и локальные ведущий/ведомый блоки управления.
В другом варианте выполнения может использоваться схема перемещения, отличная от схемы ведущий/ведомый, и все двигатели управляются непосредственно блоком управления (то есть на одном уровне подчиненности). Каждый двигатель соединен с возможностью связи с блоком управления для получения оттуда управляющих сигналов.
В наиболее типичном варианте выполнения изобретения предлагается вытягиваемый тент, расположенный на валике-накопителе (например, цилиндрическом валу), для вытягивания через работающие на растяжение тросы. Дальний конец тента предпочтительно имеет по меньшей мере пару двигателей, выполненных с возможностью вытягивания тента. Как описано выше, эти двигатели могут быть выполнены с возможностью вытягивания тента вдоль неподвижных тросов или могут быть выполнены с возможностью вытягивания тента посредством наматывания тросов. Накопительный валик может иметь дополнительный двигатель, выполненный с возможностью вращения накопительного валика и втягивания тента. Блок управления может управлять двигателем накопительного валика и по меньшей мере одним из двигателей тента (например, ведущим двигателем), так чтобы в тенте во время вытягивания и втягивания поддерживалось заданное натяжение. Другой двигатель (двигатели) (например, ведомый двигатель (двигатели)) тента может регулировать свое положение относительно двигателя, управляемого блоком управления. Однако предпочтительно каждый двигатель отдельно связан с главным блоком управления и управляется им.
Блок управления согласно изобретению также предпочтительно содержит интерфейс, обеспечивающий управление предложенным устройством обычным контроллером тента (выполненным с возможностью управления одним двигателем). Например, пользователь может ввести команду «открыть» или «закрыть», используя такой обычный контроллер, возможно, с использованием дистанционного управления.
Как описано выше, в одном из вариантов выполнения каждый двигатель тента (первый двигатель) перемещает концевой блок вдоль удлиненного элемента, предпочтительно удлиненного гибкого троса. Локальный ведущий блок управления может рассчитывать ошибку между требуемым положением и измеренным положением концевого блока, связанного с ним, и может использовать ее для управления перемещением ведущего двигателя. Например, локальный блок управления поддерживает перемещение концевого блока до тех пор, пока измеренное положение блока не достигнет требуемого. Перемещение и, таким образом, положение и/или скорость двигателей тента предпочтительно отслеживаются угловыми кодирующими преобразователями. Угловое кодирующее устройство может также быть связано с накопительным валиком для отслеживания его перемещения и, таким образом, величины части покрытия, которая была развернута или втянута. Блок управления обычно информирует локальный блок управления ведущего двигателя о требуемом положении, например, вытянутом положении или начальном положении.
В одном из вариантов выполнения локальный ведущий блок управления может управлять перемещением ведущего двигателя также в зависимости от скорости накопительного валика. Например, максимальная скорость ведущего двигателя во время развертывания может быть установлена равной скорости накопительного валика. Это предотвращает перемещение двигателей покрытия со скоростью, большей, чем скорость вытягивания покрытия. Скорость предпочтительно поддерживается (путем обеспечения соответствующего тока двигателей тента), так чтобы поддерживать требуемое натяжение в покрытии.
Как описано выше, другие двигатели тента могут регулировать свое положение относительно ведущего двигателя. Это значит, что перемещение двигателей синхронизировано (скоординировано) и, таким образом, тент вытягивается и втягивается уравновешенно. Это может быть осуществлено путем контроля каждым из концевых блоков своего положения (например, с использованием угловых кодирующих устройств) и путем оценивания этих положений ведущим локальным контроллером по сравнению с ожидаемыми положениями. Если ошибка положения превосходит определенное значение, скорость одного или более двигателей регулируется для компенсации ошибки. Ошибка положения может также отслеживаться и корректироваться, когда концевые блоки неподвижны (например, когда тент развернут), для обеспечения поддержания натяжения.
В другом варианте все концевые блоки могут связываться непосредственно с главным блоком управления. Каждый концевой блок, следовательно, соединен с возможностью связи с блоком управления, так что он может как посылать, так и принимать сигналы. Например, каждый концевой блок может быть выполнен с возможностью передачи информации о своем положении в блок управления, и каждый концевой блок может быть выполнен с возможностью приема команд от блока управления. Подобным же образом блок втягивания может быть выполнен с возможностью передачи в блок управления информации о степени развернутости покрытия и может быть выполнен с возможностью приема команд на выдвижение или втягивание покрытия. Блок управления отслеживает и обрабатывает всю информацию от блоков втягивания и концевых блоков и выдает команды каждому блоку для уравновешивания натяжения в покрытии.
Положение покрытия может отслеживаться с помощью угловых кодирующих устройств, как описано выше. Однако положение может контролироваться также другими средствами, такими как оптическое измерение расстояния (например, с помощью лазера). Наиболее предпочтительно, натяжение в покрытии измеряется тензометром (например, датчиком нагрузки). Предпочтительно тензометры расположены на каждой стороне покрытия для контроля натяжения, прикладываемого с обеих сторон. Тензометр (тензометры) может быть расположен в различных местах. Они могут быть расположены в точке крепления к покрытию. Если двигатели расположены на концевых блоках, которые перемещают покрытие вдоль упругих тросов, тензометр (тензометры) может быть встроен в концевые блоки. Если двигатели расположены смежно с концевыми опорами, тензометр может быть расположен между упругим тросом и покрытием. Однако предпочтительно тензометр не присоединен к упругому тросу или покрытию, а присоединен к концевым опорам. Когда натяжение в покрытии меняется, меняется и нагрузка, приложенная к концевым опорам. Измеряя величину нагрузки на концевых опорах, можно определить величину натяжения в покрытии. Расположение тензометра подобным образом имеет преимущество, состоящее в том, что тензометр не перемещается, когда покрытие выдвигается или втягивается. Следовательно, данные от тензометра не нужно передавать через провода в покрытии. Вместо этого данные могут быть переданы в блок управления либо по воздушным проводам, либо, более предпочтительно, по подземным проводам. Блок управления может управлять двигателями в соответствии с измеренным натяжением для поддержания требуемого натяжения покрытия при развертывании и втягивании. В некоторых вариантах тензометр может быть использован, кроме того, для определения скорости/положения развертывания экрана.
Предпочтительно по меньшей мере один из концевых блоков связан с концевым выключателем для определения столкновения концевого блока с чем-либо. Устройство может содержать двунаправленный «буфер» и микровыключатель. Сигнал от концевого выключателя, показывающий наличие препятствия, может быть использован для остановки двигателей покрытия и двигателя накопительного валика.
Двигатели предпочтительно используют зубчатую червячную передачу, благодаря чему двигатель может перемещать покрытие, но натяжение, приложенное к покрытию, не может вызвать вращение двигателей в обратном направлении. Таким образом, покрытие может только развертываться и убираться посредством управления каждым двигателем, таким образом, обеспечивая то, что может поддерживаться правильное натяжение.
Рассматриваемое в другом аспекте изобретение обеспечивает тент или навес, который содержит выдвижное покрытие, выполненное с возможностью вытягивания и втягивания, и в котором имеется по меньшей мере один двигатель, предназначенный для перемещения удаленного конца покрытия для вытягивания покрытия, и другой двигатель, предназначенный для втягивания покрытия. Один из приводных двигателей может управлять другим двигателем по схеме ведущий/ведомый.
Устройство управления согласно изобретению и его предпочтительные варианты выполнения могут быть модифицированы для существующих покрывающих систем, и, следовательно, изобретение также распространяется на системы управления для использования в покрывающей системе. Таким образом, рассматриваемое в другом аспекте изобретение обеспечивает систему управления для управления вытягиванием и втягиванием во втягиваемом покрывающем устройстве, причем система содержит входы для приема информации о положении и/или скорости и/или натяжении от концевого блока покрывающего устройства и от втягивающего блока, и выход для выдачи управляющих сигналов двигателю для перемещения концевого блока и для вращения двигателя в блоке втягивания; причем натяжение в покрытии поддерживается в заданном интервале во время вытягивания и/или втягивания.
Предпочтительно могут быть использованы дополнительные концевые блоки. Для перемещения каждого концевого блока может быть использован дополнительный двигатель. Как отмечено выше, хотя эти блоки могут непосредственно управляться единственным блоком управления, они могут в другом варианте быть ведомыми по отношению к первому приводному двигателю.
Таким образом, система управления согласно настоящему изобретению обеспечивает синхронное перемещение концевых блоков путем контроля информации о положении/скорости концевых блоков или натяжении в покрытии, и управления концевыми блоками соответственно. Информация о положении/скорости связана с натяжением в покрытии. Таким образом, требуемое натяжение может поддерживаться во время вытягивания/втягивания посредством слежения за положением/скоростью/натяжением и регулирования перемещения соответственно. Как описано выше, для получения информации о натяжении может использоваться тензометр.
В развернутом состоянии, если концевой блок перемещается так, что натяжение уменьшается, система управления подает соответствующий управляющий сигнал приводному двигателю того концевого блока, перемещение которого назад в правильное положение необходимо для восстановления натяжения.
Еще в одном аспекте изобретение обеспечивает способ работы втягивающегося покрывающего устройства, как описано выше. Такой способ может в широком смысле включать этапы работы первого двигателя для вытягивания покрытия и работы второго двигателя для втягивания покрытия, а также включать работу блока управления для управления первым и вторым двигателями.
В любом из вышеописанных покрывающих устройств еще один способ увеличения натяжения в покрытии во время развертывания состоит в введении разницы в высоте в концевых точках покрытия, то есть поперечной разницы в высоте между сторонами покрытия. Если концевые точки покрытия являются опорными стойками, это может быть достигнуто выполнением одной опорной стойки выше, чем другой. Если концевые точки прикреплены к стене, концевые точки могут быть закреплены на стене на разных высотах.
При такой поперечной разнице в высоте концевых точек, когда покрытие разворачивается, покрытие вынуждено отклоняться от горизонтали. В то же время, когда покрытие продолжает разворачиваться, к нему прикладывается все более возрастающее поперечное натяжение. Это уравновешивает возрастающую потребность в натяжении при разворачивании покрытия из-за увеличения веса полотна и увеличения чувствительности к внешним силам, например ветру.
Следующее преимущество этой разницы в высоте состоит в том, что когда покрытие отклоняется от горизонтали, в направлении нижней концевой точки создается естественный дренажный путь. Для больших тентов дренаж может быть серьезной проблемой, так как вода имеет тенденцию собираться на покрытии, вызывая его провисание, что, в свою очередь, ведет к накоплению большего количества воды. Если на покрытии накапливается слишком много воды, покрытие может быть повреждено. Более маленькие покрытия, которые не простираются на большое расстояние, не имеют такой проблемы с дренажем, так как они могут разворачиваться под достаточно крутым углом к горизонтали, чтобы дождь легко скатывался с поверхности покрытия. При меньших пролетах покрытия также легче обеспечить натяжение, требуемое, чтобы предотвратить провисание покрытия при этом угле. Однако при больших покрытиях, перекрывающих большую длину, угол покрытия не может быть сделан слишком крутым либо без повышения заднего конца покрытия, либо без опускания нижнего конца покрытия на значительные величины. Также натяжение, требуемое для поддержания большого покрытия достаточно натянутым при таком уменьшенном угле, является слишком большим. Следовательно, обеспечение пути дренажа посредством наклона поверхности покрытия на одну сторону обеспечивает намного лучшее решение для больших покрытий.
Понятно, что признаки, описанные выше в отношении к покрывающему устройству, могут быть равным образом применимы к системе управления или способу, и наоборот.
В этом описании ссылки на удлиненные тросы или на работающие на растяжение тросы могут относиться к кабелям или канатам достаточной прочности, предназначенным для поддержания покрытия и выдерживания необходимых сил натяжения.
Предпочтительные варианты настоящего изобретения описаны ниже только в качестве примера со ссылкой на сопроводительные чертежи, на которых:
Фиг.1 представляет собой вид покрывающего устройства и системы управления согласно первому варианту выполнения изобретения, причем покрытие находится в закрытом положении;
Фиг.2 представляет собой вид покрывающего устройства и системы управления согласно первому варианту выполнения изобретения, причем покрытие находится в открытом положении;
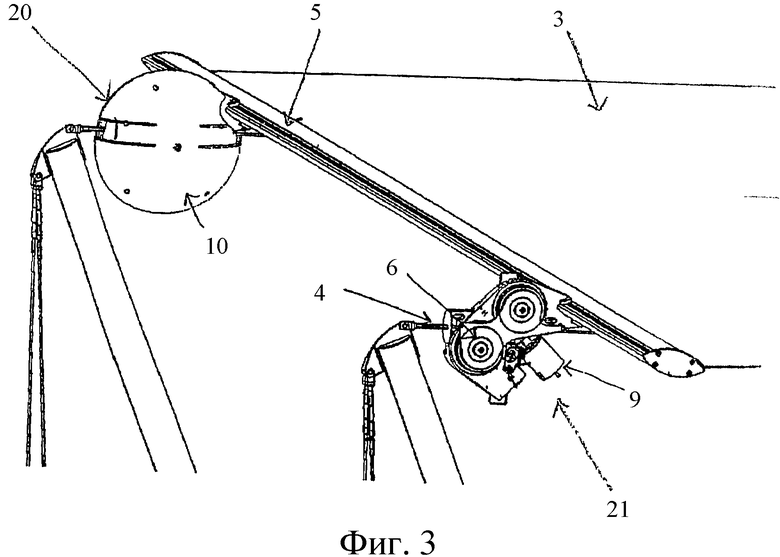
Фиг.3 представляет собой более подробный вид концевых блоков покрывающей системы;
Фиг.4 представляет собой вид ближней стороны ведомого концевого блока со снятым кожухом;
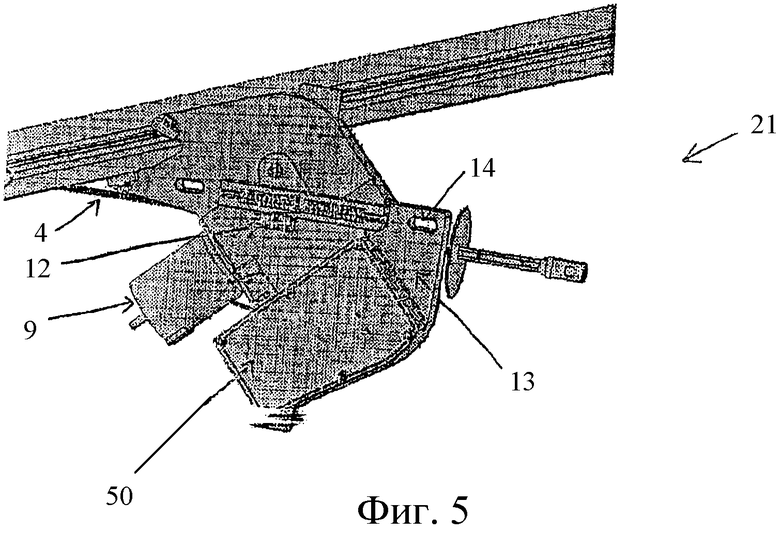
Фиг.5 представляет собой вид задней стороны ведомого концевого блока со снятым кожухом;
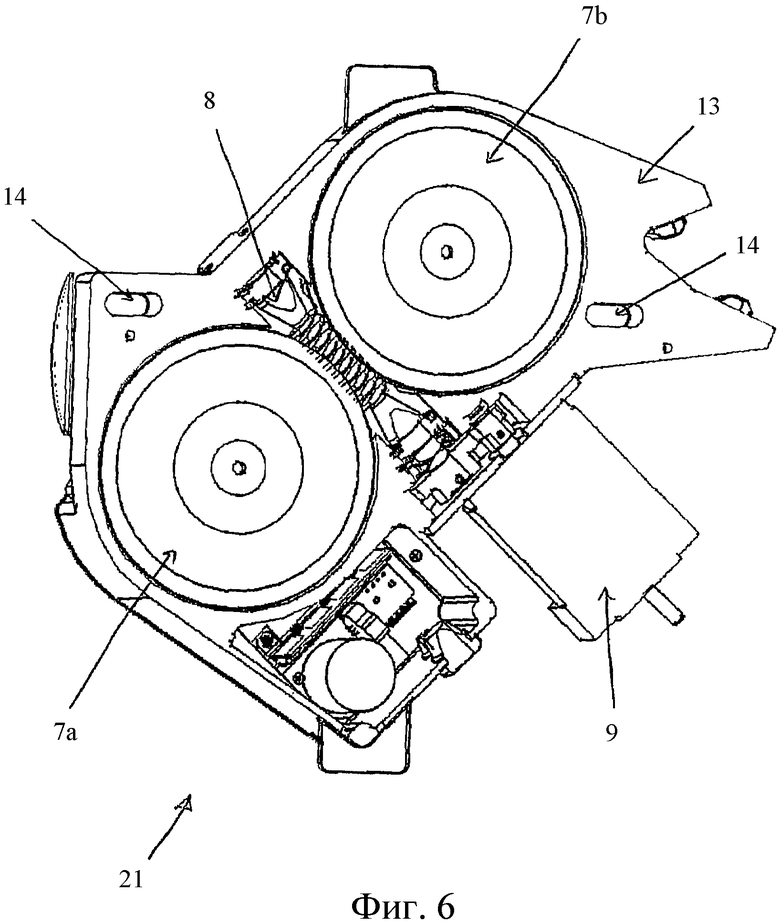
Фиг.6 представляет собой вид разреза ведомого концевого блока с ближней стороны;
Фиг.7 представляет собой вид с местным разрезом блока управления перемещением и двигателя накопительного валика покрывающего устройства;
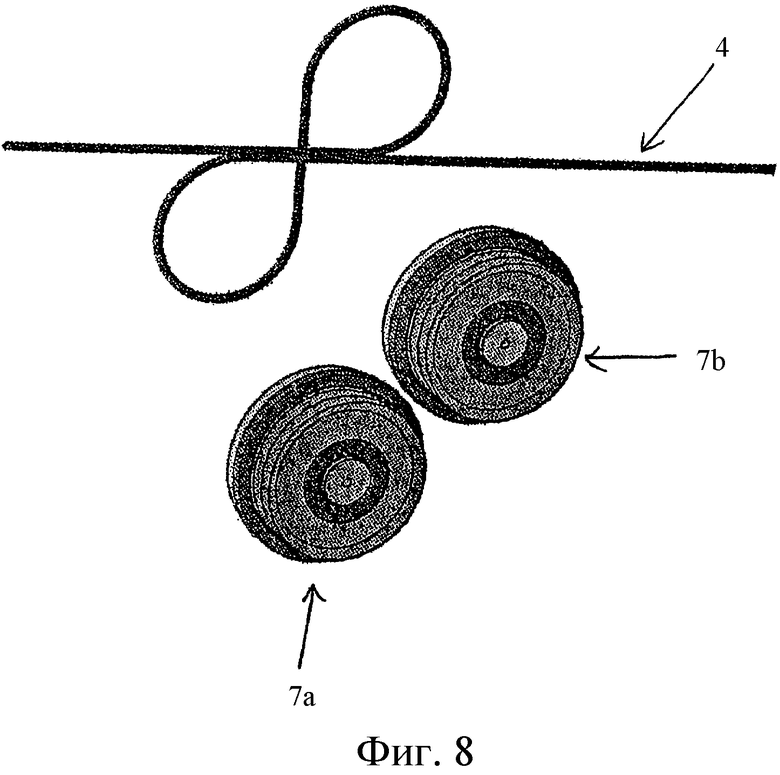
Фиг.8 представляет собой систему роликов и кабель концевых блоков в разобранном виде;
Фиг.9 представляет собой блок-схему системы управления согласно одному из вариантов выполнения изобретения;
Фиг.10 представляет собой блок-схему, иллюстрирующую реализацию разных режимов, выполняемых локальными контроллерами концевых блоков;
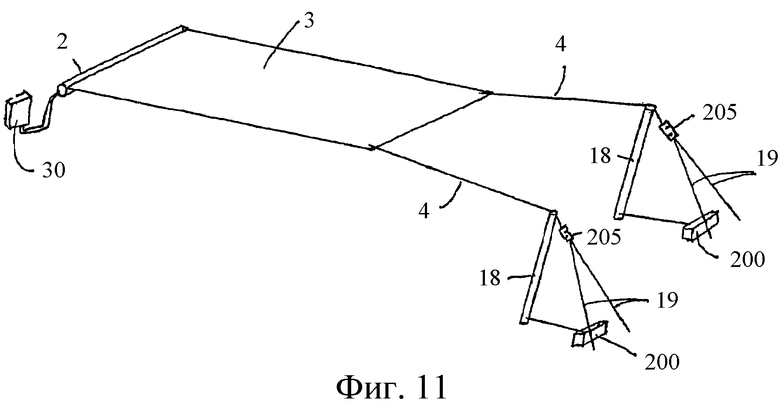
Фиг.11 представляет собой второй вариант выполнения изобретения;
Фиг.12 представляет собой третий вариант выполнения изобретения;
Фиг.13 представляет собой четвертый вариант выполнения изобретения.
На фиг.1 и 2 показано покрывающее устройство 1 в открытом и закрытом положениях соответственно. Покрывающее устройство 1 содержит накопительный валик 2 на заднем конце покрытия 3. Неиспользуемая часть покрытия намотана на накопительный валик 2, который обычно имеет форму цилиндрического вала и обычно помещен в корпус. Для поддержки покрытия и предотвращения излишнего провисания под воздействием собственного веса предусмотрены два сильно натянутые троса 4. Накопительный валик 2 и концы тросов прикреплены к стене. Другой конец каждого троса 4 прикреплен к опорной стойке 18, которая прикреплена к земле с помощью оттяжек 19. Стойка 18 обычно погружена в землю и немного наклонена от вертикали в направлении, по существу противоположном направлению приложения силы натяжения. Это позволяет стойке 18 выдерживать большую силу.
Как показано более подробно на фиг.3, на передней кромке покрытия 3 прикреплена поперечная балка. Поперечная балка 5 обеспечивает поддержку, так чтобы предотвратить поперечное провисание покрытия. Два концевых блока, ведущий концевой блок 20 и ведомый концевой блок 21 прикреплены к покрытию 3. Ведущий концевой блок 20 показан в кожухе 10, а ведомый концевой блок 21 показан без кожуха. Во время работы оба концевых блока находятся в кожухах. Большинство элементов ведущего концевого блока идентичны элементам ведомого концевого блока, и потому ниже для описания обоих блоков описан только ведомый концевой блок. Все различия будут описаны ниже.
Ближняя сторона ведомого концевого блока 21 показана более подробно на фиг.4. Задняя сторона показана на фиг.5. Как видно, ведомый концевой блок 21 прикреплен как к покрытию 3, так и к тросу 4 через систему роликов 6. Система роликов содержит два ролика 7а, 7b. Трос 4 обернут вокруг ролика 7а в направлении против часовой стрелки, как показано на фиг.8, и затем в направлении по часовой стрелке вокруг ролика 7b, после чего пропущен в своем первоначальном направлении. Ведомый концевой блок 21 также содержит двигатель 9 и червячную передачу 8, как можно видеть более подробно в разрезе на фиг.6. Роликовая система 6 и червячная передача 8 размещены внутри кожуха 13.
Два ролика выполнены с возможностью вращения в противоположных направлениях с помощью двигателя 9 и червячной передачи 8. Оба ролика содержат зубчатую часть (не показана), которая находится в зацеплении с червячной передачей 8. При вращении роликов 7а, 7b один из роликов (в зависимости от направления перемещения) наматывает трос 4 на себя, а другой ролик разматывает такое же количество троса (ролики имеют одинаковый размер и вращаются с одинаковой скоростью). Таким образом, ролики и, следовательно, поперечная балка 5 и покрытие 3 могут перемещаться в продольном направлении вдоль тросов 4.
Оба концевых блока содержат также по угловому кодирующему устройству 11, как видно на фиг.4. Оно содержит пружину с резиновым роликом, нагруженным на трос 4, который используется для измерения расстояния, пройденного вдоль троса, так что можно было определить положение и скорость соответствующего концевого блока.
Оба концевых блока также содержат, каждый, концевой выключатель 12, как показано на фиг.5. Концевой выключатель 12 прикреплен болтами к корпусу 13 и содержит двунаправленный буфер и микровыключатель. Кожух 10 прикреплен с возможностью скольжения к корпусу 13 с помощью пазов 14 в корпусе 13. Когда кожух 10 ударяется обо что-нибудь (например, конец троса), корпус 13 и все элементы, прикрепленные к нему, продолжают перемещаться до остановки на расстояние около 10 мм благодаря соединению с пазами. При этом активируется двунаправленный буфер концевого выключателя, который подает сигнал в соответствующий локальный контроллер 54, 64 концевого блока (описан более подробно ниже со ссылкой на фиг.9), обозначая наличие препятствия. Таким образом, концевой выключатель может обозначить максимальную точку при открытии покрытия или состояние начального положения (полностью свернутое покрытие). Для возвращения положения кожуха 10 и корпуса 13 в нормальное предусмотрена предварительно натянутая пружина (не показана).
На стене смежно с накопительным валиком 2 расположен блок 30 управления перемещением, как показано на фиг.7. Он выполняет общую функцию обеспечения необходимых электрических средств перемещения и управления раскрытием/закрытием покрытия 3 при получении команд на раскрытие/закрытие от стандартного контроллера 45 покрытия (показанного на фиг.9 как 'главный блок 45 управления'). В этом варианте выполнения в качестве контроллера 45 покрытия используется контроллер Simu Halcomaster 2200Рrо, содержащийся в блоке 30 управления. В других вариантах выполнения может использоваться контроллер любого другого типа из стандартных контроллеров для тентов, предназначенных для управления известными тентами с приводом, имеющими несинхронизированные двигатели, например, изготавливаемые фирмами «Simu» или «Somfy». Блок управления перемещением управляет разными двигателями при получении команд от контроллера 45 на раскрытие и закрытие тента, одновременно поддерживая необходимое натяжение тента.
Блок 30 управления непосредственно управляет стационарным двигателем 35 переменного тока, который вращает накопительный валик 2. Он также непосредственно связывается с ведущим концевым блоком 20 для управления двигателем 9 постоянного тока на одной стороне поперечной балки. Ведущий концевой блок 20, в свою очередь, связывается с ведомым концевым блоком 21 для управления другим двигателем 9 постоянного тока.
Как показано на фиг.9, блок 30 управления перемещением содержит источник 31 питания блока управления, имеющий сетевой интерфейс 32, питающий источник 33 питания напряжением 48 В постоянного тока. Источник 33 питает печатную плату 34 блока управления перемещением, которая является частью блока управления перемещением, а также ведущий концевой блок (как подробно описано ниже). Питание ведущего концевого блока 20 осуществляется с помощью кабеля 41, который проходит через покрытие от блока 30 управления перемещением к ведущему концевому блоку 20.
Печатная плата 34 содержит ряд элементов для обеспечения различных функций. Она питается от источника питания 31 блока управления перемещением и распределяет питание на стационарный двигатель 35 постоянного тока через сетевой интерфейс 43 двигателя постоянного тока. Она также содержит интерфейс 37 главного блока управления, к которому присоединен контроллер 45 тента.
С выхода контроллера 45 команды «развернуть», «остановить» или «свернуть» подаются в интерфейс 37. Интерфейс 37 преобразует эти команды в команды для активации стационарного двигателя 35 постоянного тока и ведущего/ведомого концевого блока 20, 21. Таким образом, один двигатель стандартного покрывающего устройства выполнен так, что обычный контроллер 45 покрывающего устройства, который предназначен управлять одним двигателем, способен работать с покрывающим устройством данного варианта.
Печатная плата 34 блока управления перемещением имеет локальный контроллер 39, который получает команды от внешнего контроллера 45 через интерфейс 37 и управляет работой стационарного двигателя 35 постоянного тока через реле. Этот двигатель присоединен к валику 2, так что он может вращать валик 2 для разворачивания или свертывания покрытия 3.
К общей оси валика и двигателя постоянного тока прикреплено угловое кодирующее устройство 40 для контроля вращения и определения степени раскрытия /втянутости покрытия. Результат подается назад в локальный контроллер 39 и используется в управлении работой двигателя, как более подробно описано ниже.
Печатная плата 34 также имеет выполненный по стандарту RS422 интерфейс 36, который осуществляет связь с ведущим концевым блоком 20 через кабель 42 передачи данных. Кабель 42 проходит через покрытие 3 от блока 30 управления к ведущему концевому блоку 20. Команды перемещения передаются в ведущий концевой блок 20 через это соединение вместе с информацией от углового кодирующего устройства 40 и информацией о заданном положении от контроллера 45.
Ведущий концевой блок 20 содержит ведущую печатную плату 60. Ведущая печатная плата 60 питается напряжением 48 В постоянного тока от источника 31 питания блока управления перемещением через кабель 41 в разъем питания 66, который затем питает с помощью локального блока управления питанием драйвер двигателя и локальный контроллер 64. Драйвер двигателя затем питает через двигательный разъем 61 двигатель 9М постоянного тока. Разъем питания 66 также присоединен к силовому кабелю, который питает ведомый концевой блок 21 через разъем питания 56.
Ведущая печатная плата РСВ 60 имеет ведущий локальный контроллер 64. который управляет и синхронизирует перемещение обоих концевых блоков. Ведущий локальный контроллер 64 получает команды перемещения от печатной платы РСВ 34 блока управления перемещением через разъем связи 65. а также информацию от углового кодирующего устройства ИМ о перемещении концевого блока вдоль троса. Он также снабжен входом от концевого выключателя блока через интерфейс 63 концевого выключателя.
Он управляет двигателем 9М (индексы S и М обозначают ведомый и ведущий соответственно) с помощью драйвера двигателя при получении этих сигналов. Он также передает соответствующие команды перемещения в ведомый концевой блок 21 через стандартный интерфейс RS232 канала связи по кабелю 57 передачи данных и соответствующим разъемам 62, 52.
Ведомый концевой блок 21 снабжен ведомым блоком РСВ 50 (силовым блоком управления), который снабжает энергией двигатель 9S через локальный блок управления энергией, пусковое устройство двигателя и двигательный соединитель 51 таким же способом, как ведущий блок 20.
Ведомый блок РСВ 50 также имеет ведомый локальный контроллер 54. Он получает команды перемещения от ведущего блока и управляет двигателем 9S в ответ на эти команды. Он также получает информацию от ведомого углового кодирующего устройства 11S относительно перемещения вдоль троса и от локального концевого выключателя через интерфейс 53 концевого выключателя.
Контроллер 64, 54 каждого концевого блока 20, 21 может работать в нескольких разных режимах. Реализация этих режимов показана в блок-схеме на фиг.10.
Как видно, существуют три основных контура, выполненные по схеме подчиненного регулирования. Внутренним контуром является контур 101 тока/момента, средним контуром является контур 102 скорости, а внешним контуром является контур 103 положения.
Одним из режимов работы является режим работы по положению, который является основным режимом. Локальный контроллер 64 управляет двигателем 9 для перемещения концевого блока в заданную точку на тросе 4 и поддержания неподвижного положения по достижении этой точки.
В этом режиме контур 103 положения сначала вычисляет ошибку по положению (в блоке 104), которая является разницей заданного положения ("задание положения") и положения, полученного от углового кодирующего устройства 11 ("обратная связь по положению"). Затем используется ПИ (пропорционально-интегральный) алгоритм 105 для подачи в контур скорости "задания скорости", необходимого для уменьшения ошибки по положению. Задание скорости ограничивается блоком ограничения 106 при превышении заданного максимального значения.
Контур 102 скорости затем вычисляет (в блоке 107) ошибку по скорости, которая является разницей задания скорости и скорости, полученной от углового кодирующего устройства. Как видно, сигнал обратной связи рассчитывается (в блоке 108) как первая производная сигнала обратной связи по положению. Затем используется еще один ПИ (пропорционально-интегральный) алгоритм 109 для подачи в контур 101 тока задания тока, необходимого для уменьшения ошибки по скорости. Блок ограничения 110 задания тока предотвращает превышение сигналом задания скорости заданного максимального значения.
Контур 101 тока рассчитывает (в блоке 111) ошибку по току, которая является разницей задания тока и фактического тока, полученного от датчика 114 тока, и использует еще один ПИ (пропорционально-интегральный) алгоритм 112 для управления с помощью блока 113 широтно-импульсной модуляции (ШИМ) и силового контроллера 115 электрической энергией, подаваемой на двигатель 9.
Понятно, что в режиме работы по положению задания по скорости и току обычно ограничены максимальным значением, то есть скорость и момент двигателя максимальны. Например, максимальная скорость может быть установлена равной скорости двигателя 35 постоянного тока накопительного валика.
Описанное выше относится к раскрытию тента. Требуемое положение тента известно (например, полностью открытое положение), и оно определяет задание по положению. В течение большей части периода перемещения между закрытым и открытым положением ошибка положения велика (потому что тент проходит длинный путь до требуемого полностью открытого положения), и поэтому значение задания по скорости постоянно, потому что оно равно максимальному заданию по скорости. Таким же образом, значение задания по моменту будет постоянным и равным максимуму задания по моменту, потому что скорость накопительного валика не может достичь максимума скорости концевого блока.
При приближении концевого блока к требуемому положению (в данном случае полностью открытому) ошибка по положению уменьшается, "максимальные пределы" по существу сбрасываются, и контур положения плавно переходит в линейный режим.
При сворачивании тента 3 используется вариант изложенного выше подхода. Так как скорость накопительного валика известна, требуемое место конечного положения рассчитывается динамически для обеспечения синхронизации с накопительным валиком 2. Задание по положению концевого блока затем поддерживается немного ниже этого значения для поддержания натяжения материала тента. Кроме того, координация концевых блоков поддерживает приложенное натяжение равномерно на каждой стороне покрытия, так чтобы обеспечить отсутствие складок в покрытии при сворачивании и чтобы покрытие сворачивалось прямо (без перекосов в ту или другую сторону).
В режиме работы по положению задание в контуре тока ограничивается таким образом, чтобы находиться в пределах, не вызывающих нежелательного момента двигателя 35 переменного тока, превышающего момент, необходимый для поддержания натяжения тента.
В этом режиме может быть добавлен этап управления с прямой связью, рассчитывающий и посылающий производную задания по скорости непосредственно в контур скорости.
Два других режима работы являются промежуточными режимами режима работы по положению. В режиме работы по скорости контур скорости получает задание непосредственно от контроллера (а не от контура положения). Этот режим может использоваться при поиске начального положения тента. В режиме работы по моменту/току контроллер подает задание непосредственно в контур тока для непосредственного управления моментом, развиваемым двигателем.
Система может также быть установлена в режим поддержания тента открытым. При этом ведущий концевой блок 20 блокируется в том положении, в котором он находится. Ведомый концевой блок 21 блокируется в соответствии с положением ведущего блока. В этом режиме печатная плата 60 блока управления перемещением отслеживает положение и рассчитывает ошибку по положению, которая является ошибкой между текущим положением и заданным положением. Если ошибка превышает заданное значение, печатная плата 60 передает сообщение печатной плате РСВ 34 блока управления перемещением. При этом инициируется новая команда 'открыть покрытие', так чтобы покрытие 3 вернулось назад к требуемому положению из положения ошибки.
При использовании для развертывания покрытия 3 покрывающей системы пользователь дает команду 'открыть' через, например, пульт дистанционного управления внешним контроллером 45. Печатная плата 34 блока управления перемещением получает команды через интерфейс 37. При получении команды локальный контроллер 39 активирует стационарный двигатель 35 переменного тока, который начинает вращать накопительный валик 2 для разматывания покрытия 3. Угловое кодирующее устройство контролирует перемещение накопительного валика.
Печатная плата 34 блока управления перемещением подает команду, содержащую заданное положение на тросе 4, а также данные о скорости накопительного валика в ведущий локальный контроллер 64 ведущей печатной платы 60 через стандартный последовательный интерфейс RS422 канала связи по кабелю 42.
Ведущий локальный контроллер 64 получает эти данные и ограничивает скорость привода системы роликов в соответствии с этим, так чтобы скорости накопительного валика и концевого блока оставались синхронизированными. Кроме того, концевые блоки выполнены с возможностью приложения требуемой для поддержания натяжения покрытия силы. Например, заданные положения и/или скорости концевых блоков рассчитываются для поддержания желаемой степени натяжения в тенте.
Ведущий локальный контроллер 64 активирует двигатель 9М постоянного тока с помощью драйвера двигателя и двигательного разъема 61. Двигатель вращает систему 6 роликов с помощью червячной передачи 8 и обеспечивает ее перемещение вдоль троса 4. Контроллер 64 находится в режиме работы по положению и, следовательно, обеспечивает перемещение ведущего концевого блока 20 к заданной точке, одновременно ограничивая его скорость и момент соответственно.
Угловое кодирующее устройство ИМ ведущего концевого блока контролирует пройденное ведущим концевым блоком расстояние и передает эту информацию в ведущий локальный контроллер. Ведущий контроллер посылает свое текущее положение и требуемую скорость в ведомый концевой блок по каналу связи через кабель 57 как сигнал задания положения. Эта информация принимается ведомым локальным контроллером 54, который находится в режиме работы по положению и управляет двигателем 9S для перемещения ведомого концевого блока на то же расстояние вдоль троса, что и ведущий концевой блок. Ведущий концевой блок продолжает посылать информацию о своем положении в ведомый блок, так что ведомый блок остается синхронизированным с ведущим блоком.
Угловое кодирующее устройство 11S ведомого концевого блока контролирует расстояние, пройденное ведомым блоком вдоль троса, и передает эту информацию в ведомый локальный контроллеру, который рассчитывает текущее положение и скорость. Эта информация передается в ведущую печатную плату 60 по каналу связи через кабель 57. Ведущий локальный контроллер 64 использует эту информацию для расчета взаимной ошибки по положению ведущего и ведомого концевых блоков. Желательно, чтобы ведущий и ведомый блоки оставались синхронизированными (то есть находились на одинаковом расстоянии вдоль троса), для того чтобы обе стороны покрытия были натянуты равномерно. Как описано выше, это важно для предотвращения складок в покрытии, образующихся при свертывании, и сохранения покрытия прямым при свертывании. Любые ошибки в синхронизации могут привести к образованию складок и сгибов или могут вызвать перекос полотна на накопительном валике. Это может повредить покрытие или привести к проблемам с развертыванием и втягиванием.
Если ведомый концевой блок не может сохранить синхронизированность, например, если на него действует больший вращающий момент, взаимная ошибка по положению возрастает. Когда она превысит ранее установленный максимум, ведущий локальный контроллер 64 уменьшит скорость ведущего концевого блока 20 по отношению к скорости ведомого блока, чтобы предотвратить еще большее возрастание взаимной ошибки по положению.
Если ведомый блок преодолеет момент сопротивления, он начнет сокращать расхождение с ведущим концевым блоком. Ведущий концевой блок, следовательно, переместит предел скорости.
По достижении положения конечной точки, заданной печатной платой 34 блока управления перемещением, ведущим и ведомым блоками 20, 21 ведущий блок прекращает перемещение. Ведомый блок остается блокированным в соответствии с положением ведущего блока. Ведущий контроллер 64 передает в печатную плату РСВ 34 блока управления перемещением информацию о достижении конечного положения. Это обеспечивает остановку стационарного двигателя 35 переменного тока локальным контроллером 39 печатной платы 34 блока управления перемещением для прекращения развертывание покрытия, а также изменение направления вращения двигателя 35 на обратное на короткое время для натяжения покрытия 3. Затем двигатель останавливается.
Ведущий и ведомый концевые блоки 20, 21 затем переходят в режим подержания тента открытым, как описано выше. Ведущий концевой блок 20 продолжает связываться с блоком 30 управления перемещением, пока система находится в включенном состоянии. Система может быть выключена в любой момент, но при этом ведущий концевой блок не сможет больше следить за ошибкой положения и, таким образом, обеспечить поддержание натяжения покрытия 3.
Если в какой-либо момент система управления неспособна синхронизировать скорости, то система остановится и перейдет в режим ошибки.
Для втягивания покрытия 3 пользователь подает команду «закрыть» с помощью внешнего контроллера 45. Печатная плата 34 блока управления перемещением получает команду через интерфейс 37. При получении команды локальный контроллер 39 активирует стационарный двигатель 35 переменного тока, который начинает вращать накопительный валик 2 для втягивания покрытия 3.
Печатная плата 34 блока управления перемещением посылает команду «закрыть», состоящую из начального положения в качестве заданного положения на тросе 4, в ведущий локальный контроллер 64 ведущей печатной платы 60 по последовательному интерфейсу RS422 канала связи. Ведущий локальный контроллер 64 также принимает информацию о скорости накопительного валика и определяет скорость привода системы роликов в соответствии с ней, так чтобы скорости накопительного валика и концевых блоков оставались синхронизированными, а покрытие оставалось под соответствующим натяжением при втягивании.
Ведущий локальный контроллер 64 находится в режиме работы по положению и через двигательный разъем 61 активирует двигатель 9М постоянного тока, который перемещает систему 6 роликов с помощью червячной передачи 8 и обеспечивает ее перемещение вдоль троса 4 к накопительному валику 2. Контроллер также ограничивает скорость ведущего концевого блока 20 в соответствии со скоростью накопительного валика 2, вращаемого стационарным двигателем 35 переменного тока.
Как и при развертывании покрытия 3, ведущий концевой блок управляет перемещением концевых блоков вдоль тросов. Угловые кодирующие устройства 11 контролируют расстояние, пройденное концевыми блоками, а ведущий локальный контроллер 64 поддерживает их синхронность, отслеживая и ограничивая взаимную ошибку по положению.
По достижении ведущим и ведомым концевыми блоками 20, 21 точки начального положения, определяемой печатной платой 34 блока управления перемещением, ведущий блок прекращает перемещение. Ведомый блок остается заблокированным в соответствии с положением ведущего блока. Ведущий контроллер 64 передает в печатную плату 36 блока управления перемещением информации о достижении начального положения. При этом локальный контроллер 39 печатной платы 34 блока управления перемещением останавливает двигатель 35 переменного тока для прекращения втягивания покрытия и меняет направление вращения двигателя 35 на короткое время для натяжения покрытия 3. Затем двигатель останавливается. Этап окончательного натяжения не требуется, так как конечным положением тента является закрытое положение.
Если концевые выключатели 12 активируются при ударении концевых блоков о что-либо, ведущий контроллер 64 останавливает перемещение концевых блоков. Он также посылает сигнал в печатную плату 34 управления перемещением главного блока для остановки двигателя переменного тока, вращающего накопительный валик. Это может случиться, например, если на тросах имеется препятствие или если начальное положение достигнуто раньше, чем ожидалось. Если возникает конфликт между положением, определяемым угловыми кодирующими устройствами, и положением, определяемым переключателем концевого выключателя, то приоритет отдается концевому выключателю.
Описанный выше вариант выполнения имеет систему перемещения типа ведущий/ведомый. Однако понятно, что одинаково применима другая система управления, в которой все двигатели в концевых блоках и в накопительном валике управляются непосредственно главным блоком управления. В такой системе нет деления двигателей на ведущий/ведомый. Вместо этого каждый двигатель посылает данные в главный блок управления и получает команды напрямую от него.
Другие варианты выполнения изобретения описаны ниже со ссылками на фиг.11, 12 и 13. Многие элементы этих вариантов выполнения такие же, как элементы первого варианта, описанного выше, и потому ниже не описаны.
На фиг.11 показан второй вариант выполнения изобретения. В этом варианте покрытие 3 не развертывается и не втягивается по неподвижным параллельным тросам, как в первом варианте выполнения, но вместо этого тросы 4 прикреплены на одном конце к углам передней кромки покрытия 3, а на другом конце прикреплены к лебедкам 200. В варианте выполнения, показанном на фиг.11, лебедки 200 расположены на уровне земли, а тросы 4 проложены через опорные стойки 18 от верха до низа, где они выходят из стоек 18 и присоединяются к лебедкам 200. Также возможны и другие конструкции. Стойки 18 слегка отклонены от вертикали и от полотна тента (в направлении, в котором приложены силы натяжения), так что они могут выдержать большее натяжение. Покрытие развертывается путем вращения лебедок 200, так что тросы 4 наматываются на лебедки 200, а покрытие 3 разматывается с накопительного валика 2, и покрытие сворачивается путем вращения лебедок, так что тросы 4 разматываются с лебедок 200, а покрытие 3 наматывается на накопительный валик 2. Натяжение в покрытии поддерживается путем управления двигателем, вращающим накопительный валик 2, и двигателями, вращающими лебедки 200, таким же образом, как описано выше для первого варианта выполнения.
Двигатели могут быть выполнены по схеме ведущий/ведомый, как описано выше. Однако в этом варианте выполнения все двигатели предпочтительно управляются индивидуально основным блоком 30 управления. Такое решение проще реализовать с этим типом покрытия, потому что все двигатели находятся в фиксированных положениях, так что силовой кабель и кабель данных для соединения блока управления и двигателей могут быть расположены либо в воздухе над землей, либо под землей, а не проходить через покрытие 3.
Тросы 4 этого варианта выполнения расходятся в направлении растягивания покрытия 3. Другими словами, опорные стойки 18 располагаются друг от друга на расстоянии, большем, чем ширина покрытия 3, так что когда тросы 4 натягивают покрытие 3, они создают как продольное, так и поперечное натяжение в покрытии 3. При этом нет необходимости использовать жесткую поперечную переднюю балку для поддержания поперечного натяжения в покрытии.
Положение и скорость покрытия 3 могут контролироваться с помощью угловых кодирующих устройств в накопительном валике и в лебедках точно так же, как в первом варианте выполнения. На фиг.11 показаны датчики 205 натяжения в виде S-образных датчиков нагрузки для контроля натяжения покрытия 3. На каждой стороне покрытия расположен датчик 205 натяжения, так что натяжение на обеих сторонах может измеряться одновременно. На фиг.11 датчик 205 натяжения расположен между опорными стойками 18 и оттяжками 19. Когда натяжение прикладывается к покрытию 3, натяжение также прикладывается к опорным стойками 18 и оттяжкам 19. Поэтому измерение натяжения, таким образом, позволяет косвенно измерить натяжение покрытия 3. Преимущество такого устройства состоит в том, что датчик 205 натяжения остается в неподвижном положении, и, следовательно, данные от него могут легко быть получены по неподвижным проводам.
Другой вариант выполнения изобретения показан на фиг.12. Этот третий вариант выполнения изобретения такой же, как второй вариант во всех отношениях, за исключением того, что датчики 205 натяжения располагаются между тросами 4 и углами покрытия 3. Эта конструкция менее предпочтительна, чем конструкция на фиг.11, так как датчик 205 натяжения не зафиксирован относительно блока управления, и потому передача данных от датчика к блоку управления не так проста. Однако такая конструкция обеспечивает более прямое измерение натяжения покрытия 3.
На фиг.13 показан четвертый вариант выполнения изобретения. Этот вариант подобен первому варианту изобретения в том, что покрытие 3 вытягивается по неподвижным тросам 4 с помощью перемещаемых двигателями роликовых блоков 210, прикрепленных к тросам 4. Однако в этой конструкции тросы 4 расходятся в направлении вытягивания покрытия 3 путем размещения опорных стоек 18 на переднем (вытягиваемом) конце тента на большем расстоянии друг от друга, чем точки крепления тросов 4 на заднем (втягиваемом) конце тента. Как во втором и третьем вариантах, это расширение тросов 4 создает поперечное натяжение, а также продольное натяжение покрытия 3. Покрытие 3 прикреплено к роликовым блокам 210 с помощью коротких соединительных проволок или стержней 215, так чтобы приспосабливаться к изменяющемуся углу (и, таким образом, изменяющемуся поперечному натяжению), когда покрытие 3 раскрывается. Хотя на фиг.13 датчик натяжения не показан, он может легко быть встроен в соединительные стержни 215, или в роликовые блоки 210, или в оттяжки 19, как в предыдущих вариантах выполнения изобретения.
Датчики 205 натяжения главным образом предназначены для контроля натяжения покрытия 3 при развертывании и втягивании, чтобы обеспечить хорошую балансировку развертывания и втягивания или поддерживать требуемое положение при развертывании или требуемое натяжение в покрытии 3 при изменяющихся атмосферных условиях (например, натяжение в покрытии 3 изменится, если изменится температура или влажность). Однако данные от датчика 205 натяжения могут также вызвать автоматическое втягивание покрытия 3 при определенных условиях. Например, сильные ветры, а также накопившийся снег или ветви поваленного дерева могут вызвать увеличение натяжения покрытия 3. Если датчик 205 натяжения определяет, что натяжение превысило определенный предел, покрытие 3 может быть автоматически втянуто, чтобы предохранить его от повреждения из-за чрезмерного натяжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОКРЫВАЮЩАЯ СИСТЕМА | 2005 |
|
RU2407868C2 |
| МЕТОДЫ КОНТРОЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ СО СЪЕМНЫМИ РАБОЧИМИ ЧАСТЯМИ | 2014 |
|
RU2684177C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ПРИБОР С КОНСТРУКЦИЕЙ РЕТРАНСЛЯЦИИ СИГНАЛА | 2014 |
|
RU2664168C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МЯГКИМ УПОРОМ | 2014 |
|
RU2669463C2 |
| ДЖОЙСТИКОВЫЕ УЗЛЫ ПЕРЕКЛЮЧАТЕЛЕЙ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2661144C2 |
| КОНФИГУРАЦИЯ ПЕРЕКЛЮЧАТЕЛЯ ПОВОРОТНОЙ РУЧКИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2690595C2 |
| МНОГОПРОЦЕССОРНЫЙ КОНТРОЛЬ ДВИГАТЕЛЕЙ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2663487C2 |
| КАРТРИДЖ И ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2416524C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2018 |
|
RU2758101C2 |
| ЗАПИСЫВАЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ЗАПИСЫВАЮЩИМ УСТРОЙСТВОМ | 2011 |
|
RU2481958C2 |







Изобретение относится к конструкциям навесов и тентов и способам их управления. Изобретение позволит поддерживать натяжение навесов или тентов во время вытягивания/втягивания посредством слежения за положением скоростью и регулированием перемещения. Втягивающийся тент содержит покрытие, выполненное с возможностью вытягивания и втягивания и в котором имеются первый двигатель, выполненный с возможностью вытягивания покрытия, второй двигатель, выполненный с возможностью втягивания покрытия, блок управления, выполненный с возможностью управления первым и вторым двигателями. Первый и второй двигатели синхронизированы с обеспечением поддержания натяжения в покрытии в пределах заданных значений. 4 н. и 20 з.п. ф-лы, 13 ил.
1. Втягивающийся тент, который содержит покрытие, выполненное с возможностью вытягивания и втягивания, и в котором имеются группа первых двигателей, выполненных с возможностью вытягивания покрытия, второй двигатель, выполненный с возможностью втягивания покрытия, и блок управления, выполненный с возможностью управления первыми двигателями и вторым двигателем, причем первые и второй двигатели выполнены с возможностью независимого управления и синхронизированы с обеспечением поддержания натяжения в покрытии в заданных пределах значений.
2. Втягивающийся тент по п.1, дополнительно содержащий датчик для определения натяжения в покрытии.
3. Втягивающийся тент по п.2, в котором блок управления выполнен с возможностью управления двигателями в соответствии с измеренным натяжением.
4. Втягивающийся тент по п.1, в котором первые двигатели выполнены с возможностью натягивания передней кромки покрытия, а второй двигатель выполнен с возможностью натягивания задней кромки покрытия.
5. Втягивающийся тент по п.1, в котором первый двигатель прикреплен к покрытию.
6. Втягивающийся тент по любому из пп.1-5, в котором покрытие выполнено с возможностью вытягивания вдоль нескольких работающих на растяжение тросов.
7. Втягивающийся тент по п.6, в котором по меньшей мере один из двигателей выполнен с возможностью приведения в действие одного или более концевых блоков вдоль одного или более указанных работающих на растяжение тросов.
8. Втягивающийся тент по п.7, в котором каждый концевой блок содержит зацепляющий элемент, предназначенный для подвижного взаимодействия передней части покрытия с тросом.
9. Втягивающийся тент по п.8, в котором каждый зацепляющий элемент содержит по меньшей мере один ролик.
10. Втягивающийся тент по п.9, в котором каждый зацепляющий элемент содержит два ролика, образующих систему роликов.
11. Втягивающийся тент по любому из пп.7-10, дополнительно содержащий концевой выключатель, соединенный по меньшей мере с одним из концевых блоков для определения столкновения концевого блока с объектом.
12. Втягивающийся тент по п.6, в котором для каждого работающего на растяжение троса предназначен один первый двигатель.
13. Втягивающийся тент по п.12, в котором каждый двигатель, перемещающий концевой блок, расположен с концевым блоком и перемещается вместе с ним.
14. Втягивающийся тент по любому из пп.1-5, дополнительно содержащий угловые кодирующие устройства, выполненные с возможностью контролирования перемещения и, таким образом, положения и/или скорости двигателей.
15. Втягивающийся тент по любому из пп.1-5, в котором каждый первый двигатель и второй двигатель выполнены с возможностью поддержания натяжения в покрытии при его вытягивании и втягивании.
16. Втягивающийся тент по п.15, в котором блок управления управляет первыми и вторым двигателями с обеспечением поддержания заданной степени натяжения в покрытии при его вытягивании и втягивании.
17. Втягивающийся тент по любому из пп.1-5, дополнительно содержащий накопительный валик для хранения покрытия, когда оно не используется.
18. Втягивающийся тент по п.17, в котором накопительный валик приводится во вращение вторым двигателем.
19. Втягивающийся тент по п.17, дополнительно содержащий угловое кодирующее устройство, связанное с накопительным валиком и предназначенное для контроля его перемещения.
20. Втягивающийся тент по любому из пп.1-5, дополнительно содержащий интерфейс, обеспечивающий возможность использования для управления устройством обычного контроллера для тента, выполненного с возможностью управления одним двигателем.
21. Тент или навес, который содержит вытягивающееся покрытие, выполненное с возможностью вытягивания и втягивания, и в котором имеются группа первых двигателей, предназначенных для вытягивания навеса, второй двигатель, предназначенный для втягивания навеса, и блок управления, выполненный с возможностью управления первыми двигателями и вторым двигателем, причем первые и второй двигатели выполнены с возможностью независимого управления и синхронизированы с обеспечением поддержания натяжения в покрытии в пределах заданного интервала значений.
22. Способ управления втягивающимся тентом, включающий:
управление группой первых двигателей для вытягивания покрытия и управление вторым двигателем для втягивания покрытия, причем указанными первыми двигателями и вторым двигателем управляют независимо с помощью блока управления и первые двигатели и второй двигатель синхронизируют с обеспечением поддержания натяжения в покрытии в пределах заданного интервала значений.
23. Способ по п.22, в котором при нахождении устройства в развернутом состоянии и перемещении первого двигателя так, что натяжение уменьшается, система управления подает управляющий сигнал для перемещения покрытия назад в правильное положение, пока натяжение не восстановится.
24. Система управления, предназначенная для управления вытягиванием и втягиванием во втягиваемом тенте, содержащая входы для приема информации о положении, и/или скорости, и/или натяжении от группы концевых блоков покрывающего устройства и от блока втягивания и выход для подачи независимых управляющих сигналов в группу двигателей для перемещения концевых блоков и для вращения двигателя в блоке втягивания, при этом натяжение в покрытии поддерживается в пределах заданного диапазона при вытягивании и/или втягивании тента.
| Способ борьбы с сорными растениями | 1977 |
|
SU645518A3 |
| Способ лечения атопической бронхиальной астмы | 1982 |
|
SU1113120A1 |
| СПОСОБ РАННЕЙ ДИАГНОСТИКИ ШЕЙНОЙ РОДОВОЙ ТРАВМЫ МЛАДЕНЦЕВ | 2019 |
|
RU2723760C1 |
| СПОСОБ ПОЛУЧЕНИЯ РЕКТИФИКОВАННОГО СПИРТА | 2009 |
|
RU2421522C1 |
| НАВЕС | 2002 |
|
RU2235172C2 |

