ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и, в различных конструкциях, к хирургическим режущим и сшивающим скобками инструментам и используемым в них картриджам со скобками, которые выполнены с возможностью рассечения и сшивания ткани скобками.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические сшивающие аппараты часто применяются для установки скоб в мягкие ткани для уменьшения или устранения кровотечения из мягких тканей, в особенности, например, из рассеченных мягких тканей. Такие хирургические сшивающие устройства, как, например, эндокатер, имеют концевой зажим, который может двигаться или поворачиваться относительно блока удлиненного ствола. Концевые зажимы зачастую выполняются с возможностью фиксации мягких тканей между первой и второй браншей, причем первая бранша часто включает в себя картридж со скобами, выполненный с возможностью хранения в нем и извлечения из него скоб, а вторая бранша часто включает упорную пластину. Такие хирургические сшивающие устройства включают зажимную систему для поворота упорной пластины относительно картриджа со скобами.
Хирургические сшивающие устройства, как описано выше, могут быть сконструированы с возможность поворота упорного элемента концевого зажима относительно картриджа со скобками с целью зажатия между ними мягких тканей. При различных обстоятельствах упорный элемент может быть сконструирован для приложения фиксирующей силы к мягкой ткани с целью прочного удержания мягкой ткани между упорным элементом и картридж со скобками. Однако, если хирург не удовлетворен положением концевого зажима, ему, как правило, следует активировать отпускной механизм хирургического сшивающего устройства для поворота упорного элемента в открытую позицию, а затем переместить концевой зажим. Далее, скобы, как правило, подаются из картриджа со скобками при помощи выталкивателя, который проходит сквозь желоб в картридже со скобками, что вызывает деформирование скобок об упорный элемент и скрепляет слои мягких тканей. Как известно специалистам в данной области, для более надежного скрепления слоев ткани скобы часто накладывают в несколько линий, или рядов. Концевой зажим может также включать режущий инструмент, например, нож, который выдвигается между двух рядов скоб для иссечения мягкой ткани после сшивания скобами слоев мягкой ткани.
Подобные хирургические сшивающие устройства и зажимы могут быть соответствующего размера и конструкции для введения в полости тела через троакар или другой разрез для доступа. Концевой зажим как правило присоединен к удлиненному стрежню соответствующего размера для прохождения через троакар или разрез. Конструкция удлиненного стержня часто функционально подсоединена к рукоятке, которая поддерживает контрольные системы и/или пусковые устройства для контроля действия концевого зажима. Для большего удобства точного расположения и ориентации концевого зажима внутри тела, многие хирургические инструменты сконструированы для упрощения сочленения концевого зажима относительно части удлиненного стержня.
Изложенный выше комментарий предназначен лишь для наглядной демонстрации различных аспектов соответствующей технологии в области применения изобретения на момент его регистрации, и его не следует рассматривать как ограничение патентной формулы.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидными, а само изобретение станет более понятным после ознакомления с представленным ниже описанием вариантов осуществления настоящего изобретения в совокупности с сопроводительными фигурами, где: ФИГ. 1 является видом в перспективе хирургического сшивающего устройства согласно одной из форм настоящего изобретения;
ФИГ. 2 является другим видом в перспективе хирургического инструмента с ФИГ. 1 с удаленными частью корпуса рукоятки;
На ФИГ. 3 представлен вид в разобранном состоянии конструкции одного из зажимов настоящего изобретения
ФИГ. 4 представляет собой частичный поперечный разрез части концевого зажима и узла удлиненного стержня хирургического инструмента с ФИГ. 1 и 2 с узлом упорного элемента в открытой позиции;
На ФИГ. 5 представлен другой частичный поперечный разрез концевого зажима и узла удлиненного стержня, изображенных на ФИГ. 4, с упорным элементом в закрытой позиции перед приведением в действие;
ФИГ. 6 представляет собой еще один частичный поперечный разрез концевого зажима и узла удлиненного стержня с ФИГ. 4 и 5 после того, как режущая ткани деталь была выдвинута в наиболее дистальную позицию внутри концевого зажима;
На ФИГ. 7 представлен вид в перспективе узла соединительной муфты, являющейся частью настоящего изобретения;
На ФИГ. 8 представлен узел соединительной муфты, изображенной на ФИГ. 7, в разобранном виде;
ФИГ. 9 представляет вид в перспективе проксимального конца концевого зажима и дистального конца узла удлиненного стержня и подсоединенного к ним узла соединительной муфты;
На ФИГ. 10 представлен вид сверху проксимального конца концевого зажима с ФИГ. 9;
На ФИГ. 11 представлен вид сверху дистального конца узла соединительной муфты с ФИГ. 9;
ФИГ. 12 является видом в перспективе собранной части концевого зажима и узла удлиненного стержня перед подсоединением к нему концевого зажима;
ФИГ. 13 является другим видом в перспективе части концевого зажима и узла удлиненного стержня после того, как концевой зажим был первоначально подсоединен к части соединительной муфты узла удлиненного стержня;
ФИГ. 14 является другим перспективным видом компонентов, изображенных на ФИГ. 13 после того, как концевой зажим был соединен с узлом удлиненного стержня при помощи узла соединительной муфты;
На ФИГ. 15 представлен вид в перспективе конструкции шарнирного контроля, являющегося частью настоящего изобретения;
На ФИГ. 16 представлен вид в перспективе части сегмента конструкции шарнирного стержня;
На ФИГ. 17 представлен вид в перспективе конструкции шарнирного соединения, являющегося частью настоящего изобретения, в разобранном виде;
На ФИГ. 18 представлен вид в перспективе конструкции шарнирного соединения, изображенного на ФИГ. 17;
На ФИГ. 19 представлен вид сверху конструкции шарнирного соединения, показанного на ФИГ. 17 и 18;
На ФИГ. 20 представлен вид компонентов, изображенных на ФИГ. 19, в разрезе;
На ФИГ. 21 представлен другой вид в разрезе шарнирного соединения, изображенного на РИС. 19 и 20;
На ФИГ. 22 представлен еще один вид в разрезе шарнирного соединения, изображенного на ФИГ. 21, в согнутом положении;
На ФИГ. 23 представлен вид в перспективе конструкции пусковой системы, являющейся частью настоящего изобретения;
На ФИГ. 24 представлен вид в перспективе системы вращения концевого зажима, являющейся частью настоящего изобретения;
На ФИГ. 25 представлен вид в перспективе части шарнирного соединения и узла соединительной муфты, являющихся частью настоящего изобретения;
На ФИГ. 26 представлен вид в перспективе конструкции системы вращения стержня, являющейся частью настоящего изобретения;
ФИГ. 27 является видом в перспективе хирургического инструмента с ФИГ. 1 и 2 в разобранном виде;
На ФИГ. 28 представлен вид в перспективе съемного передаточного узла, являющейся частью настоящего изобретения, в разобранном виде;
На ФИГ. 28А представлен вид сверху части собранного съемного передаточного узла с ФИГ. 28, присоединенного к подвеске двигателя;
ФИГ. 28В представляет вид в перспективе части конструкции съемного передаточного узла и узла подвески двигателя с ФИГ. 28А;
На ФИГ. 29 представлен вид в поперечном сечении части конструкции узла рукоятки;
ФИГ. 30 представляет вид съемного передаточного узла и подвески двигателя внутри корпуса рукоятки в разобранном виде;
На ФИГ. 31 представлен вид с пространственным разделением компонентов узла подвески двигателя.
ФИГ. 32 представляет еще один вид съемного передаточного узла и узла подвески двигателя внутри рукояти прибора в разобранном виде в разрезе;
На ФИГ. 33 представлен вид сверху и сбоку части узла рукоятки, на котором для простоты восприятия отсутствуют некоторые компоненты;
На ФИГ. 34 представлен вид снизу в перспективе конструкции переключателя, являющегося частью настоящего изобретения;
На ФИГ. 35 представлена конструкция переключателя, изображенного на ФИГ. 34, в разобранном виде;
ФИГ. 36 является видом в разрезе части конструкции переключателя с ФИГ. 34 и 35, размещенного в узле рукоятки, где часть контрольного рычажного переключатель находится в неактивированной позиции;
ФИГ. 37 является видом в разрезе части переключателя с ФИГ. 36, размещенного в рукояти, где часть контрольного рычажного переключателя находится в активированной позиции;
На ФИГ. 38 представлен вид сбоку в разрезе конструкции переключателя, изображенного на ФИГ. 36;
На ФИГ. 39 представлен вид сбоку в разрезе конструкции переключателя, изображенного на ФИГ. 37;
На ФИГ. 40 представлен вид сверху и сбоку конструкции переключателя, изображенного на ФИГ. 34-39;
На ФИГ. 41 представлен фронтальный вид сверху конструкции переключателя, изображенного на ФИГ. 34-40;
На ФИГ. 42 представлен еще один вид конструкции переключателя, изображенного на ФИГ. 34-41, в разобранном виде;
На ФИГ. 43 представлен вид сзади и сверху узла дискового переключателя с лопатками в активированной позиции;
На ФИГ. 44 представлен другой вид сзади и сверху узла дискового переключателя с лопатками в другой активированной позиции;
На ФИГ. 45 представлен еще один частичный вид в разрезе концевого зажима и конструкции узла приводного стержня;
На ФИГ. 46 представлен увеличенный вид в разрезе части узла шарнирного соединения и узла соединительной муфты с подсоединенным концевым зажимом;
ФИГ. 47 является видом в перспективе части узла рукоятки с удаленными компонентами корпуса ручки;
На ФИГ. 48 представлен увеличенный вид в перспективе части рукоятки прибора, иллюстрирующий конструкцию проводникового соединения;
На ФИГ. 49 представлен вид в перспективе части другой конструкции соединительной муфты и конструкции шарнирного соединения в разобранном виде;
На ФИГ. 50 представлен вид в перспективе еще одной конструкции шарнирного соединения, являющегося частью настоящего изобретения;
На ФИГ. 51 представлено шарнирное соединение, изображенное на ФИГ. 50, в разобранном виде;
На ФИГ. 52 представлен вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 50 и 51.
На ФИГ. 53 представлен еще один вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 50-52.
На ФИГ. 54 представлен вид в перспективе еще одной конструкции шарнирного соединения, являющегося частью настоящего изобретения;
На ФИГ. 55 представлено шарнирное соединение, изображенное на ФИГ. 54, в разобранном виде;
На ФИГ. 56 представлен частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 54 и 55.
На ФИГ. 57 представлен частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 54-56.
На ФИГ. 58 представлен еще один частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 54-57.
На ФИГ. 59 представлен еще один частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 54-58 с соединением в активированной позиции;
На ФИГ. 60 представлен еще один частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 54-59 с соединением в другой активированной позиции;
На ФИГ. 61 представлен вид в перспективе еще одной конструкции шарнирного соединения, являющегося частью настоящего изобретения;
На ФИГ. 62 представлен еще один вид в перспективе конструкции шарнирного соединения, изображенного на ФИГ. 60, в активированной позиции;
ФИГ. 63 является видом в перспективе узла шарнирного соединения, изображенного на ФИГ. 61 и 62;
На ФИГ. 64 представлен вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 61-63;
На ФИГ. 65 представлен еще один вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 61-64.
На ФИГ. 66 представлен еще один частичный вид в разрезе конструкции шарнирного соединения, изображенного на ФИГ. 61-65 с шарнирным соединением в активированной ориентации;
На ФИГ. 67 представлен вид в перспективе еще одной конструкции узла подвески двигателя, являющегося частью настоящего изобретения;
На ФИГ. 68 представлен фронтальный вид сверху конструкции узла подвески двигателя, изображенного на ФИГ. 67;
ФИГ. 69 представляет конструкцию узла подвески двигателя, изображенную на ФИГ. 67 и 68, в разобранном виде;
ФИГ. 70 демонстрирует вид в перспективе некоторых форм электрического хирургического концевого зажима для применения с хирургическими инструментами;
На ФИГ. 71 представлен вид в перспективе некоторых форм концевого зажима хирургического инструмента, показанного на ФИГ. 70, с закрытыми элементами бранши и дистальным концом перемещаемого по оси элемента в частично выдвинутом положении;
На ФИГ. 72 представлен вид в перспективе некоторых форм перемещаемого по оси элемента концевого зажима, показанного на ФИГ. 70;
На ФИГ. 73 представлен вид в разрезе некоторых форм концевого зажима, изображенного на рис. 70;
ФИГ. 74-75 иллюстрируют одну из форм ультразвукового концевого зажима для применения с хирургическим инструментом;
На ФИГ. 76-77 представлены дополнительные виды одной из форм перемещаемого по оси элемента концевого зажима, показанного на ФИГ. 74;
ФИГ. 78 иллюстрирует одну из форм концевого зажима линейных скоб для применения с хирургическими инструментами;
ФИГ. 79 иллюстрирует одну из форм концевого зажима круглых скоб для применения с хирургическими инструментами;
ФИГ. 80 иллюстрирует несколько примеров силовых кабелей для применения в хирургических инструментах;
ФИГ. 81 иллюстрирует несколько примеров стержней для применения в хирургических инструментах;
ФИГ. 82 является блочной диаграммой рукояти хирургического инструмента, демонстрирующей различные элементы контроля;
ФИГ. 83 демонстрирует одну из форм различных инструментальных частей концевого зажима, включающих контуры, как описано в настоящем изобретении;
ФИГ. 84 является блочной диаграммой, демонстрирующей одну из форм контрольной конструкции для применения в контрольной схеме для контроля хирургического инструмента;
ФИГ. 85 представляет последовательную схему, демонстрирующую пример формы протекания процесса применения контрольного алгоритма, изображенного на ФИГ. 84;
ФИГ. 86 является блочной диаграммой, демонстрирующей еще одну из форм контрольной конструкции для применения в контрольной схеме для контроля хирургического инструмента;
ФИГ. 87 представляет последовательную схему, демонстрирующую пример формы протекания процесса применения контрольного алгоритма, изображенного на ФИГ. 86;
ФИГ. 88 иллюстрирует одну из форм хирургического инструмента, содержащую ретрансляционную станцию в рукоятке;
ФИГ. 89 иллюстрирует одну из форм концевого зажима с сенсорным модулем, сконструированным для передачи полученного сигнала;
ФИГ. 90 является блочной диаграммой, демонстрирующей одну из форм сенсорного модуля;
ФИГ. 91 является блочной диаграммой, демонстрирующей одну из форм ретрансляционной станции;
ФИГ. 92 является блочной диаграммой, демонстрирующей одну из форм ретрансляционной станции, сконструированной для преобразования полученного сигнала малой мощности;
ФИГ. 93 является последовательной схемой одной из форм метода ретрансляции сигнала, указывающего на состояние концевого зажима;
ФИГ. 94 иллюстрирует дистальную часть инструмента, содержащего механический упор, как показано на ФИГ. 1, в соответствии с определенными аспектами, описанными в настоящем документе;
ФИГ. 95 является диаграммой системы, адаптируемой для применения с электромеханическим упором, содержащей источник энергии, контрольную систему и приводной двигатель согласно некоторым аспектам, описанным в настоящем изобретении;
ФИГ. 96 является графической иллюстрацией, описывающей изменения тока во времени, связанные с инструментом, содержащим электромеханический упор без мягкого упора, согласно некоторым аспектам, описанным в настоящем изобретении;
ФИГ. 97 иллюстрирует дистальную часть инструмента, оборудованного механическим упором, содержащим мягкий упор, где движущая часть приведена в позицию перед контактом с мягким упором во второй позиции в конце такта, в соответствии с некоторыми аспектами, описанными в настоящем изобретении;
ФИГ. 98 демонстрирует инструмент, показанный на ФИГ. 97, где движущая часть активирована через первую позицию в конце такта во вторую позицию в конце такта в соответствии с некоторыми аспектами настоящего изобретения;
ФИГ. 99 является графической иллюстрацией, описывающей изменения тока во времени, связанные с инструментом, содержащим электромеханический упор с мягким упором, согласно некоторым аспектам, описанным в настоящем изобретении;
ФИГ. 100 является видом в перспективе альтернативного варианта подвески двигателя, который задействует шестереночный передаточный узел;
На ФИГ. 101 представлен другой вид в перспективе узла подвески двигателя, изображенной на ФИГ. 100, корпус дистального стержня удален для простоты восприятия;
ФИГ. 102 представляет другой вид в перспективе узла подвески двигателя, изображенного на ФИГ. 100 и 101;
На ФИГ. 103 представлен вид в разрезе узла подвески двигателя, изображенного на ФИГ. 100-102; и
на ФИГ. 104 представлен вид сверху узла подвески двигателя, изображенного на ФИГ. 100-103;
ФИГ. 105 иллюстрирует одну из форм хирургического инструмента, содержащую выпрямляемый с помощью датчика концевой зажим в активированной позиции;
На ФИГ. 106 показан хирургический инструмент с ФИГ. 105 в выпрямленном состоянии;
ФИГ. 107 иллюстрирует одну из форм выпрямляемого с помощью датчика концевого зажима, вставленного в хирургическую внешнюю трубку;
ФИГ. 108 иллюстрирует одну из форм выпрямляемого с помощью датчика концевого зажима, вставленного в хирургическую внешнюю трубку, в активированном состоянии;
ФИГ. 109 иллюстрирует одну из форм выпрямляемого с помощью датчика концевого зажима в активированной позиции;
ФИГ. 110 иллюстрирует одну из форм выпрямляемого с помощью датчика концевого зажима, изображенного на ФИГ. 109 в выпрямленном состоянии;
ФИГ. 111 демонстрирует одну из форм магнитного кольца для применения с выпрямляемым с помощью датчика концевым зажимом;
ФИГ. 112 иллюстрирует одну из форм выпрямляемого с помощью датчика концевого зажима, содержащего магнитное кольцо;
ФИГ. 113 иллюстрирует одну из форм датчика с магнитным язычком;
ФИГ. 114 иллюстрирует одну из форм контрольной платформы модульного двигателя;
ФИГ. 115 иллюстрирует одну из форм контрольной платформы модульного двигателя, содержащую несколько пар двигатель-контроллер;
ФИГ. 116 иллюстрирует одну из форм модульной платформы контроля двигателя, содержащую главный контроллер и второстепенный контроллер;
ФИГ. 117 иллюстрирует одну из форм контрольного процесса, применимого для хирургического инструмента, контролируемого несколькими двигателями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день и полностью включенные в настоящий документ путем отсылки:
- заявка на патент США, озаглавленная «Поворотные хирургические инструменты с электропитанием с несколькими степенями свободы», досье патентного поверенного № END7195USNP/120287;
- заявка на патент США, озаглавленная «Поворотные шарнирные соединения для хирургических инструментов с электропитанием», досье патентного поверенного № END7188USNP/120280;
- заявка на патент США, озаглавленная «Шарнирно поворачиваемые хирургические инструменты с проводящими магистралями для передачи сигнала», досье патентного поверенного № END7187USNP/120279;
- заявка на патент США, озаглавленная «Механизмы дискового переключателя для хирургических инструментов», досье патентного поверенного END7189USNP/120281;
- заявка на патент США, озаглавленная «Узлы рычажного переключателя для хирургических инструментов», досье патентного поверенного №END7192USNP/120284;
- заявка на патент США, озаглавленная «Электромеханические хирургические приборы с механизмом сигнального реле», досье патентного поверенного № END7190USNP/120282;
- заявка на патент США, озаглавленная «Концевой зажим, выпрямляемый при помощи датчика во время извлечения через троакар», досье патентного поверенного № END7193USNP/120285;
- заявка на патент США, озаглавленная «Электромеханические мягкие упоры для хирургических инструментов», досье патентного поверенного END7196USNP/120288; и
- заявка на патент США, озаглавленная «Способы управления хирургическими инструментами со съемными рабочими частями», досье патентного поверенного № END7194USNP/120286;
Для более полного понимания конструкции, принципов работы, производства и использования устройств и способов, описанных в настоящем документе, ниже приводится описание отдельных примеров вариантов осуществления изобретения. один или несколько примеров таких вариантов осуществления представлены на сопроводительных чертежах. Специалистам с достаточным опытом работы в данной области будет понятно, что устройства и способы, подробно описанные в настоящем документе и представленные на сопроводительных иллюстрациях, являются неограничивающими примерами вариантов осуществления и объем различных вариантов осуществления настоящего изобретения определяется только формулой изобретения. Особенности, проиллюстрированные или описанные применительно к одному примеру варианта осуществления, могут сочетаться с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения охватывает все модификации и варианты.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» или «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий») и «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») являются многовариантными связующими глаголами. В результате, хирургическая система, приспособление или аппарат, который «содержит», «имеет», «включает» или «вмещает» один или несколько элементов, обладает этими одним или несколькими элементов, но не ограничивается обладанием одним или несколькими элементами. Аналогично, элемент системы, приспособления или аппарата, который «содержит», «обладает», «включает» или «вмещает» одну или несколько характеристик, имеет эти одну или несколько характеристик, но не ограничивается обладанием одной или несколькими характеристиками.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к части, лежащей ближе к врачу, а термин «дистальный» относится к части, удаленной от врача. Предлагается также для удобства и ясности применительно к чертежам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
При лапароскопических манипуляциях и хирургических операциях с минимальным вмешательством используются различные типичные приспособления и методы. Однако, специалисты в данной области смогут оценить по достоинству различные методы и приспособления, описанные в данном документе, которые могут быть использованы в многочисленных хирургических процедурах и сферах применения, включая, например, те, что связаны с открытыми хирургическими манипуляциями. По ходу настоящего подробного описания специалистам в данной области будет дополнительно очевидно, что различные инструменты, описанные в настоящем документе, могут быть введены в тело любым образом, таким как через естественное отверстие, через разрез или пункционное отверстие, образованное в ткани, и т. п. Рабочие части или части концевого зажима инструментов могут быть введены непосредственно в тело пациента или могут быть введены через устройство доступа, имеющее рабочий канал, через который можно продвигать концевой зажим и удлиненный стержень хирургического инструмента.
Что касается чертежей, на которых для указания аналогичных элементов на разных изображениях используются сквозные цифровые обозначения, на ФИГ. 1-3 показан хирургический аппарат 10, способный применять поворотные активирующие движения к подсоединенной к нему рабочей части 100. Как будет подробно описано далее, инструмент 10 может эффективно использоваться с ассортиментом различных рабочих частей, которые могут попеременно подсоединяться к инструменту 10. Конструкция с ФИГ. 1 и 2, например, показана подсоединенной к концевому зажиму 102, который сконструирован для обрезания и сшивания тканей. Однако, с помощью инструмента 10 можно оперировать и другими рабочими конструкциями.
Концевой зажим
Концевой зажим 102, изображенный на ФИГ. 1-6, включает удлиненную деталь с желобом 110, которая может быть сконструирована для операбельного и подвижного поддерживания картриджа со скобками 130. Картридж со скобками 130 может включать верхнюю поверхность или поверхность картриджа 132, содержащую множество кармашков для скобок 134, неуплотненно расположенных в линиях на каждой стороне удлиненного слота 136. См. ФИГ. 3. Множество хирургических скобок 140 удерживаются на выталкивателях скобок 138, которые находятся с возможностью перемещения в кармашках для скобок 134. Также, как видно на ФИГ. 3, в одной из форм концевой зажим 102 включает концевое основание 150, сконструированное для подсоединения проксимального конца картриджа со скобками 130 и расположенное на проксимальном конце удлиненного желоба 110. Например, концевое основание 150 может быть сформировано с дистально выступающими защелками 152, которые сконструированы для сцепления с соответствующими защелками 142 на поверхности картриджа 132. Дополнительно, концевое основание 150 может быть оборудовано латерально выступающими дополнительными крепежными утолщениями 154 для крепления концевого основания 150 к удлиненному желобу 110. Например, крепежные утолщения 154 могут быть сконструированы для сцепления с соответствующими крепежными отверстиями 112 в удлиненном желобе 110.
В одной из форм концевое основание 150 включает расположенный в центре слот 156, который сконструирован для поддержки режущей ткани детали 160 и салазок 170. Режущая ткани деталь 160 может включать корпусную часть 162, в которой есть режущая ткани часть 164, подсоединенная тем или иным способом. Корпусная часть 162 может быть установлена за счет резьбы на приводной винт концевого зажима 180, который установлен с возможностью поворота внутри удлиненного желоба 110. Салазки 170 удерживаются для осевого перемещения относительно приводного винта 180 и могут быть сконструированы для взаимодействия с корпусной частью 162 режущей ткани детали 160. По мере того как режущая ткани деталь 160 перемещается дистально, салазки 170 перемещаются дистально с помощью режущей ткани детали 160. По мере перемещения салазок 170 дистально, клинья 172, имеющиеся на них, служат для перемещения выталкивателей 138 вверх внутри картриджа со скобками 130.
Концевой зажим 102 может также включать узел упорного элемента 190, которая поддерживается для избирательного движения относительно картриджа со скобками 130. По меньшей мере в одной форме узел упорного элемента 190 может содержать первую часть упорного элемента 192, которая соединена с задней частью упорного элемента 194 и верхней частью упорного элемента 196. Задняя часть упорного элемента 194 может иметь пару латерально выступающих роликов 198, которые сконструированы для приема в соответствующие отверстия для опорных роликов или пазы 114 в удлиненном желобе 110, для удобства перемещения или поворотного движения узла упорного элемента 190 относительно удлиненного желоба 110 и картриджа со скобками 130, расположенных там.
Режущая ткани деталь 160 может быть оборудована двумя латерально выступающими язычками для приведения в действие 166, которые сконструированы для скользящего приема в слоты 199 узла упорного элемента 190. Дополнительно, режущая ткани деталь 160 может также обладать пяточной частью 168, которая подобрана по размеру так, чтобы задействовать нижнюю часть удлиненного желоба 110 таким образом, что режущая ткани деталь 160 перемещается дистально, язычки 166 и пятка 168 заставляют узел упорного элемента 190 перемещаться в закрытую позицию. Язычки 166 и пятка 168 могут служить для размещения узла упорного элемента 190 относительно картриджа со скобками 130 в желательном положении по мере разрезания и сшивания ткани. Первая часть упорного элемента 192 может иметь формирующую скобы нижнюю часть 193, для формирования хирургических скобок 140 по мере их перемещения в контактирующую позицию. ФИГ. 4 иллюстрирует положение узла упорного элемента 190 и режущей ткани детали 160, когда узел упорного элемента 190 находится в открытой позиции. ФИГ. 5 иллюстрирует положение узла упорного элемента 190 и режущей ткани детали 160 после закрытия узла упорного элемента 190, но перед тем как режущая ткани деталь 160 была выдвинута дистально или «запущена». ФИГ. 6 иллюстрирует положение режущей ткани детали 160 после перемещения в наиболее дистальную позицию внутри картриджа со скобками 130.
Приводной винт концевого зажима 180 может поддерживаться с возможностью вращения внутри удлиненного желоба 110. В одной из форм, к примеру, приводной винт концевого зажима 180 может иметь проксимальный конец 182, который подсоединен к подвижному элементу крепления стержня 184, который сконструирован для взаимодействия с узлом соединительной муфты 200. Съемный элемент приводного стержня 184 может быть сконструирован для соединения с проксимальным концом 182 приводного винта концевого зажима 180. Например, съемный элемент приводного стержня 184 может иметь выступ шестиугольной формы 186, приспособленный для приема без возможности вращения в соответствующее шестиугольное гнездо, содержащее часть пусковой системы, в целом обозначенную как 500. Вращение приводного концевого зажима 180 в первом направлении заставляет режущую ткани деталь 160 перемещаться в дистальном направлении. В различных формах картридж со скобками 130 может нести на себе пару амортизаторов 174, которые служат для амортизации салазок 170 когда они достигают наиболее дистального положения внутри удлиненного желоба 110. Каждый из амортизаторов 174 могут иметь пружину 176 для обеспечения амортизатора желательной степенью смягчения.
Узел соединительной муфты концевого зажима
Различные формы рабочих частей 100 могут оперативно подсоединяться к хирургическому инструменту 10 с помощью узла соединительной муфты 200. Одна из форм узла соединительной муфты 200 показана на ФИГ. 7-14. узел соединительной муфты 200 может включать сегмент корпуса муфты 202, который сконструирован для операбельной поддержки приводного узла шестерней, в целом обозначенного как 220. По меньшей мере в одной форме приводной узел шестерней 220 включает входную шестерню 222, передаточную шестерню 228 и выходную шестерню 232. См. ФИГ. 8. Входная шестерня 222 расположена или сформирована на входном стержне 224, который поддерживается с возможностью вращения первой и второй опорными стенками 204, 206. Входной стержень 224 имеет проксимальный конец 226, сконструированный в соответствии с дистальным пусковым стержневым сегментом 510, который содержит порцию уникальной и инновационной пусковой системы 500, которая будет подробно описана ниже, Например, проксимальный конец 226 может быть сконструирован шестиугольной формы с фаской для вставки без возможности вращения в шестиугольное гнездо 512, сформированное в дистальном конце дистального сегмента пускового стержня 510. Передаточная шестерня 228 расположена или сформирована на передаточном стержне 230, который поддерживается с возможностью вращения опорными стенками 204, 206. Выходная шестерня 232 расположена или сформирована на выходном стержне 234, который поддерживается с возможностью вращения опорными стенками 204, 206. Для потребностей сборки дистальный конец 236 выходного стержня 234 может быть сконструирован для подсоединения без возможности вращения в гнездо вывода 238, которое дистально выступает сквозь крышку дистального конца 210. В одной из конструкций крышка дистального конца 210 может быть присоединена к корпусу соединительной муфты 202 с помощью крепежных элементов 208 или иных подходящих крепежных конструкций. Гнездо выхода 238 может быть закреплено на дистальном конце 236 выходного приводного стержня 234. Гнездо выхода 238 может быть сконструировано для соединения без возможности вращения со съемным элементом приводного стержня 184. Например, гнездо выхода 238 может быть сконструировано в шестиугольной форме, так что оно может сочетаться с шестиугольным выступом 186 на съемном элементе приводного стержня 184. Дополнительно, для более удобного операбельного подсоединения рабочей части 100 к узлу соединительной муфты 200, крепежное утолщение может быть сформировано на или присоединено к концевой крышке 210.
Одна из конструкций узла соединительной муфты 200 может также включать узел блокировки, в целом обозначенный как 240. По меньшей мере в одной из форм, узел блокировки 240 включает пружинный блокирующий элемент или штифт 242, который подвижно удерживается в блокирующем слоте 214, сформированном в сегменте корпуса соединительной муфты 202. Блокирующий штифт 242 может быть сконструирован с возможностью осевого перемещения внутри блокирующего слота 214, так что блокирующий конец 244 выступает из отверстия 211 в концевой крышке 210. См. ФИГ. 8. Блокирующая пружина 246 установлена за счет резьбы на блокирующем штифте 242 для смещения блокирующего штифта 242 в блокирующий слот 214 в дистальном направлении «ДН». Активирующий рычаг 248 может быть сформирован или закреплен на блокирующем штифте 242 для предоставления пользователю возможности приложить разблокирующее движение к блокирующему штифту 242 в проксимальном направлении «ПН».
Как можно видеть на ФИГ. 3, 9 и 10, удлиненный желоб 110 концевого зажима 102 может иметь проксимальную конечную стену 116, в которой есть соединительный просвет 118, сформированный там для приема крепежного утолщения 212. В одной из конструкций, например, крепежное утолщение 212 может включать шейную часть 213 с грибообразной крепежной головкой 215, сформированной на ней. Соединительный просвет 118 может иметь первую круглую секцию 120, подходящую по размеру к крепежной головке 215, которую следует вставить в него. Соединительный просвет 118 может также иметь узкий слот 122, обладающий размером, позволяющим принять шейку 213. Проксимальная концевая стена 116 может также иметь блокировочное отверстие 124 для приема дистального конца 244 блокирующего штифта 242.
Один из методов подсоединения концевого зажима 102 к узлу соединительной муфты 200 хирургического инструмента 10 может быть понятен после обращения к ФИГ. 12-14. Например, для подсоединения концевого зажима 102 к узлу соединительной муфты 200, пользователь может совместить шестиугольный выступ 186 на ведущем стержне присоединяемой части 184 с шестиугольным гнездом выхода 238. Таким же образом, грибообразная головка 215 может быть совмещена с круглой частью 120 соединительного просвета 118, как показано на ФИГ. 9 и 12. Затем пользователь может вставить выступ 186 в гнездо 238, перемещая его по оси, и крепежную головку 215 в соединительный просвет 118, как показано на ФИГ. 13. После этого пользователь может повернуть концевой зажим 102 (представленный в виде стрелки «R» на ФИГ. 14), чтобы заставить шейку 213 войти в слот 122 и позволить дистальному концу 244 блокирующего штифта 242 защелкнуться в блокирующем отверстии 124 для предотвращения последующего относительного вращения между концевым зажимом 102 и узлом соединительной муфты 200. Подобная конструкция служит для операбельного подсоединения концевого зажима 102 к хирургическому инструменту 10.
Для отсоединения концевого зажима 102 от узла соединительной муфты 200 пользователь может применить разблокирующее движение к активирующему рычагу 246 для смещения блокирующего штифта в проксимальном направлении «ПН». Такое перемещение блокирующего штифта 242 заставляет дистальный конец 244 блокирующего штифта 242 выйти из блокирующего отверстия 124 в концевой стене 116 удлиненного желоба 110. Пользователь затем может свободно вращать концевой зажим 102 относительно узла соединительной муфты в противоположном направлении для извлечения шейной части 213 крепежной кнопки 212 из слота 122 для получения возможности извлечь крепежную головку 215, потянув вдоль оси, из соединительного просвета 118 в концевом зажиме 102, и таким образом отсоединить концевой зажим 102 от узла соединительной муфты 200. Как видно из вышеизложенного, блок соединительной муфты 200 предоставляет уникальную и инновационную конструкцию для операбельного подсоединения хирургической рабочей части 100, что возможно с помощью применения движения (-ний) поворотного привода к хирургическому инструменту 10. В частности, блок соединительной муфты 200 дает возможность операбельно подсоединять ряд различных хирургических инструментов 100 или концевых зажимов 102 к блоку удлиненного стержня 30 хирургического инструмента 10.
Система шарнира
Как видно на ФИГ. 1 и 2, блок удлиненного стержня 30 может задавать ось стержня А-А. По меньшей мере в одной форме блок удлиненного стержня 30 может включать шарнирную систему 300 для избирательного поворачивания концевого зажима 102 вокруг поворотной оси В-В, которая по существу располагается поперек оси стержня А-А. Одна из форм шарнирной системы 300 показана на ФИГ. 15 и 16. Как видно на этих фигурах, шарнирная система 300 может включать шарнирное соединение с электропитанием 310. По меньшей мере в одной конструкции, шарнирное соединение 310 включает дистальную соединительную часть или дистальную скобу 312, которая поддерживается с возможностью вращения на проксимально выступающей части ступицы 203 сегмента корпуса соединительной муфты 202 дистальным корпусным подшипником 314. См. ФИГ. 20. Дистальная скоба 312 может быть подсоединена с возможностью поворота к проксимальной части шарнира или проксимальной скобе 330 шарнирным штифтом 332, который определяет шарнирную ось В-В. См. ФИГ. 18. Дистальная скоба 312 может включать дистально выступающую соединительную ступицу 316, соответствующую по размеру для приема в проксимальный конец части корпуса соединительной муфты 202. Соединительная ступица 316 может иметь кольцевую канавку 318, сконструированную для приема соединительных штифтов 320. См. ФИГ. 8. Соединительные штифты 320 служат для подсоединения части корпуса соединительной муфты 202 к дистальной скобе 312, так что сегмент корпуса соединительной муфты 202 может вращаться относительно дистальной скобы 312 вокруг оси стержня А-А. Как видно на ФИГ. 20, дистальный сегмент пускового стержня 510 проходит сквозь часть ступицы 203 сегмента корпуса соединительной муфты 202 и поддерживается с возможностью относительного вращения дистальным подшипником пускового стержня 322, установленным внутри части ступицы 203.
Для упрощения применения поворотного привода или пускового движения концевого зажима 102, так же как и упрощения вращения концевого зажима 102 относительно удлиненного стержня 30 вокруг стержневой оси А-А с одновременным сохранением возможности вращать концевой зажим 102 относительно узла удлиненного стержня 30 вокруг шарнирной оси В-В, шарнирное соединение 310 может включать уникальную и инновационную «гнездовую» систему шестерней, в целом обозначенную как 350 и расположенную в районе зубчатой передачи 351 между дистальной скобой 312 и проксимальной скобой 330. См. ФИГ. 18-20. По меньшей мере в одной из форм, например, гнездовая конструкция шестерней 350 может включать внутреннюю систему шестерней приводного стержня или «первую систему шестерней» 360, которая «помещена в гнездо» с внешней системой шестерней концевого зажима или «второй системой шестерней» 380. Применимо к настоящему изобретению термин «помещена в гнездо» может означать, что ни одна часть первой системы шестерней 360 не выступает радиально наружу за пределы любой части второй системы шестерней 380. Такая уникальная и инновационная конструкция из шестерней компактна и упрощает передачу поворотных управляющих движений концевому зажиму, одновременно также позволяя части дистальной скобы поворачиваться относительно части проксимальной скобы. Как будет подробнее обсуждаться ниже, внутренняя система шестерней приводного стержня 360 упрощает применение поворотного привода или пусковых движений от проксимального сегмента пускового стержня 520 к дистальному сегменту пускового стержня 510 с помощью шарнирного соединения 310. Подобным образом, внешняя система шестерней концевого зажима 380 упрощает применения поворотных управляющих движений к узлу соединительной муфты 200 от системы вращения концевого зажима 550, как будет подробнее обсуждаться ниже.
Например, по меньшей мере в одной форме внутренний блок 360 шестерен приводного ствола может включать
дистальную коническую шестерню 362 приводного ствол, которая может крепиться к проксимальному концу дистального сегмента 510 пускового ствола посредством винта 364. См. ФИГ. 17. Внутренняя передаточная система шестерней 360 может также включать проксимальную скошенную шестерню приводного стержня 366, которая может быть присоединена к проксимальному сегменту пускового стержня 520 винтом 368. См. ФИГ. 20. Дополнительно, внутренняя передаточная система шестерней 360 может также включать передаточную шестерню приводного стержня 370, которая расположена на передаточном зубчатом подшипнике 374, который находится на поперечном стержне шестерни 372. См. ФИГ. 17. Подобная внутренняя система шестерней приводного стержня 360 может упростить передачу поворотных передаточных движений от проксимального сегмента пускового стержня 520 через шарнирное соединение 310 к дистальном сегменту пускового стержня 510.
Как указано выше, гнездовая система шестерней 350 также включает внешнюю систему шестерней концевого зажима 380, которая упрощает применение поворотных управляющих движений к блоку соединительной муфты 200 от системы поворота концевого зажима 550 через шарнирное соединение 310. По меньшей мере в одной форме, внешняя система шестерней концевого зажима 380 может, к примеру, включать выходную скошенную шестерню 382, которая закреплена без возможности вращения (т.е. неподвижно) на проксимально выступающей части ступицы 203 сегмента корпуса соединительной муфты 202. Внешняя система шестерней концевого зажима 380 может также включать входную скошенную шестерню 384, которая закреплена без возможности вращения (т.е. неподвижно) на проксимальном сегменте поворотного стержня 552 поворотной системы концевого зажима 550. Дополнительно, внешняя передаточная система шестерней концевого зажима 380 может также включать передаточную шестерню поворотного стержня 388, которая расположена на внешнем передаточном зубчатом подшипнике 386, который находится на поперечно выступающем шарнирном штифте 332. См. ФИГ. 17. Шарнирный штифт 332 проходит через полый поперечный стержень шестерни 372 и служит для прижимания дистальной скобы 312 к проксимальной скобе 330 для шарнирного вращения вокруг поперечной шарнирной оси В-В. Шарнирный стержень 332 может быть зафиксирован в позиции пружинными зажимами 334. Уникальное и инновационное шарнирное соединение 310 и гнездовая конструкция шестерней 350 упрощают передачу различных контрольных движений от узла рукояти 20 через блок удлиненного стержня 30 к концевому зажиму 102, одновременно предоставляя концевому зажиму 102 возможность вращаться вокруг оси удлиненного стержня А-А и вращаться на шарнирах вокруг шарнирной оси В-В.
Шарнирное движение концевого зажима 102 вокруг шарнирной оси В-В относительно узла удлиненного стержня 30 может быть выполнено с помощью шарнирной контрольной системы 400. В различных формах, шарнирная контрольная система 400 может включать шарнирный контрольный двигатель 402, который функционально поддерживается в блоке рукояти 20. См. ФИГ. 15. Шарнирный контрольный двигатель 402 может быть подсоединен к шарнирному передаточному узлу 410, который функционально поддерживается на съемном передаточном узле 700, который съемно поддерживается на блоке рукояти 20, как будет описано подробнее ниже. По меньшей мере в одной форме блок шарнирного привода 410 может включать проксимальный сегмент шарнирного проводного стержня 412, который поддерживается с возможностью вращения в блоке корпуса стержня 710 съемного передаточного узла 700. См. Рис. 27 и 28. Например, проксимальный сегмент шарнирного приводного стержня 412 может поддерживаться с возможностью вращения внутри дистальной части корпуса стержня 712 шарнирными подшипниками 414. Дополнительно, проксимальный сегмент шарнирного приводного стержня 412 может поддерживаться с возможностью вращения в проксимальной части корпуса стержня 714 подшипниками 415. См. ФИГ. 28. Шарнирная контрольная система 400 может также включать проксимальный сегмент шарнирного стержня 420, который перемещается вращением вокруг оси стержня А-А шарнирным контрольным двигателем 402. Как также видно из ФИГ. 15, узел шарнирного привода 410 может также включать пару шкивов шарнирного привода 416, 417, которые служат для перемещения ремня шарнирного привода 418. Таким образом, активация шарнирного контрольного двигателя 402 может привести к вращению проксимального сегмента шарнирного стержня 420 вокруг оси стержня А-А. См. ФИГ. 15.
Как видно из ФИГ. 15 и 16, проксимальный сегмент шарнирного стержня 420 имеет резьбовую часть 422, которая приспособлена для резьбового соединения со звеном шарнирного передаточного узла 424. Вращение дистального сегмента шарнирного ведущего стержня 420 в первом направлении может аксиально переместить звено шарнирного передаточного узла 424 в дистальном направлении «ДН» и вращение дистального сегмента шарнирного ведущего стержня 420 в противоположном или втором направлении может аксиально переместить звено шарнирного передаточного узла 424 в проксимальном направлении «ПН». Звено шарнирного передаточного узла 424 может быть закреплено на планке шарнира 426 штифтом 428. Планка шарнира 426 может, в свою очередь, закрепляться на дистальной скобе 312 штифтом 429. См. ФИГ. 17. Таким образом, при желании шарнирно вращать концевой зажим 102 или рабочую часть 100 вокруг шарнирной оси В-В относительно узла удлиненного стержня 30, клиницист активирует шарнирный контрольный двигатель 402 для того, чтобы заставить шарнирный контрольный двигатель 402 вращать проксимальный сегмент шарнирного стержня 420, чтобы таким образом задействовать шарнирную планку 426 в нужном направлении для поворота дистальной скобы 312 (и присоединенного к ней концевого зажима 102) в желательном направлении. См. Рис. 21 и 22.
Пусковая система
Как указывалось выше, концевым зажимом 102 можно оперировать с помощью поворотных движений ведущего винта концевого зажима 180 пусковой системой 500, которая включает дистальный сегмент пускового стержня 510 и проксимальный сегмент пускового стержня 520. См. ФИГ. 23. Проксимальный сегмент пускового стержня 520 содержит часть узла удлиненного стержня 30 и может поддерживаться с возможностью вращения внутри полого проксимального сегмента шарнирного стержня 552 с помощью дистальной гильзы подшипника 522. См. ФИГ. 20. Вернемся к РИС. 23: по меньшей мере в одной из форм пусковая система 500 пусковой двигатель 530, функционально поддерживаемую в узле рукоятки 20. Проксимальный конец проксимального сегмента пускового стержня 520 может поддерживаться с возможностью вращения внутри съемного передаточного узла 700 и быть сконструирован для соединения с пусковым двигателем 530 способом, детально описанным ниже. Как видно из ФИГ. 30, проксимальный конец проксимального сегмента пускового стержня 520 может поддерживаться с возможностью вращения в смещающем элементе 524, установленного на дистальной опорной пластине 722 опоры передаточного узла 720. Активация пускового двигателя 530 в обязательном порядке приведет к вращению приводного винта концевого зажима 180 для применения поворотного управляющего движения к концевому зажиму 102.
Система вращения концевого зажима
В различных формах хирургический инструмент 10 также включает систему вращения концевого зажима или «дистальную систему валиков» 550 для избирательного вращения концевого зажима 102 относительно узла удлиненного стержня 30 вокруг оси стержня А-А. Система вращения концевого зажима 550 может включать проксимальный сегмент шарнирного стержня 552, который также включает часть узла удлиненного стержня 30. Как можно видеть на ФИГ. 20, проксимальный сегмент шарнирного стержня 552 может поддерживаться с возможностью вращения внутри проксимальной скобы 330 дистальной опорной стенкой 554 и проксимальной опорной стенкой 556. Дополнительно, проксимальный сегмент шарнирного стержня 552 может поддерживаться с возможностью вращения внутри проксимального сегмента шарнирного сегмента 420 дистальной опорной стенкой 558 и проксимальной опорной стенкой 559. См. Рис. 20 и 30. Проксимальный конец проксимального сегмента шарнирного стержня 552 может также поддерживаться с возможностью вращения внутри узла опоры передаточного узла 720 проксимальным подшипником 555, как видно из ФИГ. 30.
По меньшей мере в одной из форм, контрольная система вращения концевого зажима 550 может включать двигатель вращения концевого зажима или «дистальный вращательный» двигатель 560, который функционально поддерживается в блоке рукояти 20. См. ФИГ. 24. Двигатель вращения концевого зажима 560 может быть подсоединен к блоку поворотного привода 570, который функционально поддерживается на съемном передаточном блоке 700. По меньшей мере в одной форме блок поворотного привода 570 включает проксимальный сегмент шарнирного проводного стержня 572, который поддерживается с возможностью вращения в блоке корпуса стержня 710 съемного передаточного узла 700. См. ФИГ. 27. Например, проксимальный сегмент шарнирного приводного стержня 572 может поддерживаться с возможностью вращения внутри дистальной части корпуса стержня 712 подшипниками 576. Дополнительно, проксимальный сегмент шарнирного приводного стержня 572 может поддерживаться с возможностью вращения в проксимальной части корпуса 714 подшипником 577. См. рис. 28. Как также видно из ФИГ. 24 и 28, узел шарнирного привода 570 может также включать пару шкивов шарнирного привода 574, 575, которые служат для перемещения ремня шарнирного привода 578. Таким образом, приведение в действие шарнирного двигателя концевого зажима 560 приведет к вращению проксимального сегмента шарнирного стержня 552 вокруг оси стержня А-А. Вращение проксимального сегмента шарнирного стержня 552 приводит к вращению узла соединительной муфты 200 и, в конечном счете, концевого зажима 102, подсоединенного к нему.
Система вращения стержня
Различные формы хирургического инструмента 10 могут также включать систему вращения стержня, в целом обозначенную как 600. Также в настоящем документе система вращения стержня может называться «проксимальной системой вращения». По меньшей мере в одной из форм, система вращения стержня 600 включает проксимальный наружный сегмент стержня 602, который также содержит часть узла удлиненного стержня 30. Проксимальный наружный сегмент стержня 602 имеет дистальный конец 604, который подсоединен без возможности вращения к проксимальной скобе 330. Как видно из ФИГ. 19 и 26, дистальный конец 604 имеет разделительную прорезь 606 для разрешения приведения в действие соответствующей ей шарнирной планки 426. Система вращения концевого зажима 600 может включать двигатель вращения концевого зажима или «проксимальный вращательный» двигатель 610, который функционально поддерживается в блоке рукояти 20. Двигатель вращения концевого зажима 610 может быть подсоединен к блоку привода стержня 620, который функционально поддерживается на съемном передаточном блоке 700. По меньшей мере в одной форме блок привода 620 включает проксимальный сегмент приводного стержня 622, который поддерживается с возможностью вращения в дистальном блоке корпуса стержня 712 съемного передаточного узла 700 подшипниками 624. См. ФИГ. 28. Дополнительно, проксимальный сегмент приводного стержня 622 может поддерживаться с возможностью вращения в проксимальной части корпуса приводного стержня 714 подшипником 626. Как также видно из ФИГ. 26 и 28, блок приводного стержня 620 может также включать пару шкивов шарнирного привода 630, 632, которые служат для перемещения ремня привода 634. Шкив привода 632 подсоединен без возможности вращения к проксимальному сегменту приводного стержня 602 таким образом, что вращение приводного шкива 632 приводит к вращению проксимального сегмента приводного стержня 602 и концевого зажима 102, подсоединенного к нему вокруг оси стержня А-А. Как можно видеть далее на ФИГ. 28 и 30, проксимальный сегмент приводного стержня 602 поддерживается с возможностью вращения внутри дистальной части корпуса стержня 712 парой подшипниковых втулок 607 и 608.
Уникальные и инновационные конструкции шарнирных систем настоящего изобретения предоставляют множество степеней свободы концевого зажима, одновременно упрощая применение к нему поворотных управляющих движений. Например, в связи с некоторыми хирургическими операциями, может возникнуть необходимость в помещении концевого зажима в позицию, находящуюся в одной плоскости с целевой тканью. Различные конструкции настоящего изобретения предлагают по меньшей мере три степени свободы для концевого зажима, одновременно учитывая ограничения по размеру, с которыми часто сталкиваются при проведении, у примеру, лапароскопических хирургических процедур.
Различные формы существующих хирургических инструментов значительно улучшают манипулирование, точность и эффективность расположения концевого зажима относительно целевой ткани. Например, обычные стержни шарнирных соединений, которые как правило применяются для передачи питания, часто используют универсальное соединение (-я), гибкие и жесткие соединения. Все эти методы испытывают влияние ограничений при работе, в том числе ограничения в радиусе сгиба и характеристики чрезмерной длины. Различные формы уникальных и инновационных блоков удлиненного стержня и приводных систем, описанные в настоящем изобретении, к примеру, позволяют минимизировать расстояние между шарнирной осью и концевым зажимом в сравнении с другими обычными шарнирными конструкциями. Блоки удлиненного стержня и конструкции шарнирного соединения, раскрытые в настоящем документе, делают более удобной передачу по меньшей мере одного контрольного движения к концевому зажиму, одновременно также допуская множество степеней свободы для концевого зажима для возможности точно расположить концевой зажим относительно целевой ткани.
После применения концевого зажима 102 или рабочей части 100, их можно отсоединить от узла соединительной муфты 200 хирургического инструмента 10 и либо утилизировать, либо обработать по отдельности и стерилизовать с применением соответствующих методов стерилизации. Хирургический инструмент 10 может использоваться многократно с подсоединением к свежим концевым зажимам/рабочим частям. В зависимости от конкретного применения, возможно возникновение необходимости в повторной стерилизации хирургического инструмента 10. Например, инструмент 10 может быть повторно стерилизован перед применением в совершенной другой хирургической процедуре.
Перед использованием хирургический инструмент должен быть стерильным. Один из популярных методов стерилизации медицинских инструментов включает обработку инструмента влажным паром пи соответствующей температуре на протяжении соответствующего периода времени. Подобные процедуры стерилизации, будучи эффективными, в целом непригодны для стерилизации хирургических инструментов, в которых задействованы электрические компоненты, из-за высоких температур, возникающих при стерилизации влажным паром. Подобные устройства как правило стерилизуются воздействием газа, такого как, например, оксид этилена.
Различные формы хирургического инструмента 10 могут быть стерилизованы с применением обычных методов стерилизации. По меньшей мере в одной из форм, к примеру, блок удлиненного стержня 30 может быть создан из компонентов и материалов, которые могут быть эффективно стерилизованы с применением методов, которые задействуют относительно высокие температуры стерилизации. Однако, может быть желательно применение методов стерилизации, обладающих более низкими рабочими температурами при стерилизации узла рукоятки, например, для избежания возможного повреждения электрических компонентов. Таким образом, может быть желательно стерилизовать блок рукоятки 20, в котором размещены различные электрические компоненты, отдельно от узла удлиненного стержня 30. Для большего удобства применения подобных отдельных стерилизационных процедур, блок удлиненного стержня 30, по меньшей мере в одной форме, можно отделить от узла рукоятки 20.
Блок съемного передаточного узла
Более детально и с отсылкой к ФИГ. 28, блок съемного передаточного узла 700 функционально поддерживается внутри части узла рукоятки 20. В одной из форм, например, блок съемного передаточного узла 700 может размещаться внутри дистальных сегментов корпуса рукоятки 21 и 22, которые могут быть соединены с помощью защелок, винтов или других соединительных приспособлений. Дистальные сегменты корпуса рукоятки 21 и 22, будучи соединенными, могут далее называться «дистальной частью корпуса рукоятки» или «корпус» 25. Блок съемного передаточного узла 700 может, к примеру, включать блок корпуса стержня 710, который содержит дистальный корпус стержня 712 и проксимальный корпус стержня 714. Блок съемного передаточного узла 700 может также включать блок опоры передаточного узла 720, который содержит дистальную опорную пластину 722 и проксимальную соединительную опорную пластину 724. Как описывалось выше, по меньшей мере в одной из форм, блок съемного передаточного узла 700 может функционально поддерживать блок шарнирного соединения 410, проксимальный конец проксимального сегмента пускового стержня 520, блок шарнирного привода 570 и блок приводного стержня 620. Для упрощения быстрого подсоединения сегмента пускового стержня 520, узла шарнирного привода 410, узла поворотного привода 570 и узла приводного стержня 620 к пусковому двигателю 530, шарнирному контрольному двигателю 402, поворотному двигателю концевого зажима 560 и поворотному двигателю стержня 610 соответственно, может быть использована уникальная и инновационная конструкция соединительной муфты.
Блок подвески двигателя
По меньшей мере в одной из форм, например, блок съемного передаточного узла 700 может быть сконструирован с возможностью обратимого соединения к блоку подвески двигателя, в целом обозначенной как 750. Блок подвески двигателя 750 может поддерживаться внутри сегментов корпуса рукоятки 23 и 24, которые способны соединяться между собой защелками, винтами и т.д. и служат для формирования части пистолетного захвата 26 узла рукоятки 20. См. ФИГ. 1. Сегменты корпуса рукоятки 23 и 24, будучи соединенными, могут далее называться «проксимальной частью корпуса рукоятки» или «корпус» 28. Как видно из ФИГ. 29-32, блок подвески двигателя 750 может включать подвеску двигателя 752, которая поддерживается с возможностью обратимого соединения внутри сегментов корпуса рукоятки 23 и 24. По меньшей мере в одной форме, например, подвеска двигателя 752 может иметь нижнюю пластину 754 и выступающий вертикально блок опоры двигателя 756. Нижняя пластина 754 может иметь крепежный язычок 758, сформированный там и сконструированный для удерживающего приема частью нижней пластины 730 съемного передаточного узла 700. Дополнительно, правый локаторный штифт 772 и левый локаторный штифт 774 расположены в блоке опоры двигателя 756 и выступают оттуда дистально в соответствии с правой и левой гнездовыми трубками 716, 718, сформированными в проксимальной части корпуса стержня 714. См. ФИГ. 32.
По меньшей мере в одной из конструкций съемный блок передаточного узла 700 может быть обратимо соединен с узлом подвески двигателя 750 с помощью конструкций разъемных защелок. 760. Как видно из ФИГ. 31, к примеру, конструкция разъемной защелки 760 может располагаться на каждой латеральной стороне узла подвески двигателя 750. Каждая конструкция разъемной защелки 760 может включать рычаг защелки 762, который присоединен с возможностью поворота к блоку опоры двигателя 756 соответствующим штифтом 764. Каждый рычаг защелки 762 может выступать наружу через соответствующее крепежное утолщение 766, сформированное на дистальной стороне узла опоры двигателя 756. Крепежные утолщения 766 могут быть сконструированы с возможностью скольжения внутри соответствующих принимающих деталей 726, которые проксимально выступают из проксимальной соединительной опорной пластины 724. См. Рис. 30 и 32. Когда блок передаточного узла 700 взаимодействует с узлом подвески двигателя 750, крепежные утолщения 766 скользят в соответствующие принимающие части 726 так, что рычаги защелок 762 удерживают часть защелки 728 в соответствующей принимающей части 726. Каждый рычаг защелки 762 имеет соответствующую пружины защелки 768, размещенных здесь для смещения рычага защелки 762 в удерживающее взаимодействие с соответствующей частью защелки 728 для удержания узла съемного передаточного узла 700, подсоединенного к блоку подвески двигателя 750. Дополнительно, по меньшей мере в одной форме, каждая конструкция защелки 760 также включает высвобождающую кнопку 770, которая подвижно подсоединена к опоре двигателя 756 и ориентирована для избирательного контакта с ней. Каждая высвобождающая кнопка 770 может включать освобождающую пружину 771, которая смещает кнопку 770 из контактирующей позиции с соответствующим рычагом защелки 762. Когда клиницист желает отсоединить блок съемного передаточного узла 700 с узла подвески двигателя 750, клиницист просто нажимает каждую из кнопок 770 внутрь для смещения рычагов защелок 762 из удерживающего взаимодействия с частями защелок 728 на принимающих деталях 726 и затем извлекает блок съемного передаточного узла 700 из соединения с узлом подвески двигателя 750. Другие конструкции способных высвобождаться защелок могут применяться для соединения с возможностью высвобождения со съемным узлом приводного двигателя 700, и могут быть обратимо соединены с узлом подвески двигателя 750.
По меньшей мере в одной из форм хирургический инструмент 10 может также использовать блоки муфты для подсоединения контрольных двигателей к соответствующим приводным узлам, которые функционально поддерживаются на блоке съемного передаточного узла 700. Более детально и с отсылкой к ФИГ. 28-32 блок соединительной муфты 780 применяется для обратимого подсоединения узла шарнирного привода 410 к шарнирному контрольному двигателю 402. Блок соединительной муфты 780 может включать проксимальную часть муфты 782, которая функционально соединена с приводным стержнем 404 шарнирного контрольного двигателя 402. Дополнительно, блок соединительной муфты 780 может также включать дистальную часть муфты 784, которая соединена с проксимальным шарнирным приводным стержнем 412. См. Рис. 28 и 32. Каждая дистальный часть соединительной муфты 784 может иметь несколько (показано три) соединительных выступов 786, которые сконструированы для соединения без возможности вращения с соответствующими фестончатыми областями 788, сформированными на проксимальной части соединительной муфты 782. См. ФИГ. 30. Аналогично, другая дистальная часть соединительной муфты 784 может быть соединена с проксимальным стержнем поворотного привода 572 узла поворотного привода 570 и соответствующая проксимальная часть муфты 782 подсоединена к стержню двигателя поворотного привода 562. Дополнительно, другая дистальная часть соединительной муфты 784 может быть соединена с проксимальным сегментом пускового стержня 520 и соответствующая проксимальная часть муфты 782 подсоединена к пусковому стержню двигателя 532. Еще одна другая дистальная часть соединительной муфты 784 может быть соединена с проксимальным сегментом приводного стержня 622 узла приводного стержня 620 и соответствующая проксимальная часть муфты 782 подсоединена к приводному стержню 612 двигателя поворота стержня 610. Подобные блоки соединительных муфт 780 упрощают подсоединение контрольных двигателей к соответствующим узлам приводов, независимо от позиций приводных стержней и стержней двигателей.
Различные формы уникальной и инновационной конструкции узла рукоятки, описанные выше, позволяют легко отсоединить блок удлиненного стержня 30 от остальной порции узла рукоятки 20, в котором расположены двигатели 402, 530, 560 и 610 и различные электрические компоненты, в том числе контрольная система, в целом обозначенные как 800. Таким образом, блок удлиненного стержня 30 и часть съемного приводного узла 700 могут быть стерилизованы отдельно от остальной части узла рукоятки, в которой размещаются двигатели и контрольная система, которые могут быть повреждены при применении стерилизационных методов, использующих высокие температуры. Такая уникальная и инновационная конструкция съемного передаточного узла может также применяться в соединении с конструкциями, где приводная система (двигатели и контрольные компоненты) включает часть роботизированной системы, которая может удерживаться или не удерживаться рукой.
Конструкция шестереночного передаточного узла
ФИГ. 100-103 иллюстрируют альтернативный передаточный блок 5700, который задействует набор шестереночных передач для передачи движений от двигателей к соответствующим стержням. Как можно видеть на ФИГ. 100, передаточный блок 5700 может включать блок дистального корпуса стержня 5710, который включает дистальный корпус стержня 5712, который функционально поддерживает множество конструкций систем шестерней.
Корпус дистального стержня 5712 сконструирован для возможности обратимого размещения на проксимальной опорной пластине муфты 5724, в которой есть пара монтажных гнезд 5725 для приема соответствующих монтажных утолщений 5713, выступающих из корпуса дистального стержня 5712, как можно видеть на ФИГ. 100. Как и в описанных выше конструкциях, стержень пускового или рассекающего двигателя 530 напрямую подсоединен к проксимальному сегменту пускового стержня 5520 узлом соединительной муфты 5780, как можно видеть на ФИГ. 103. Проксимальный сегмент поворотного стержня 5552 поворотной системы концевого зажима 550 вращается системой шестерней, в целом обозначенных как 5565. По меньшей мере в одной форме, к примеру, система шестерней 5565 включает ведомую шестерню 5566, которая подсоединена к проксимальному сегменту поворотного привода 5552 и поддерживается в зубчатом зацеплении с ведущей шестерней 5567. Как можно наиболее детально видеть на ФИГ. 103, ведущая шестерня 5567 размещена на зубчатом стержне 5568, который поддерживается с возможностью вращения в корпусе дистального стержня 5712. Зубчатый стержень 5568 соединен со стержнем вращения концевого зажима или дистальным двигателем валиков 560 узлом соединительной муфты 5780.
Проксимальный сегмент шарнирного стержня 5420 вращается системой шестерней, в целом обозначенных как 5430. По меньшей мере в одной форме, к примеру, система шестерней 5430 включает ведомую шестерню 5432, которая подсоединена к проксимальному сегменту шарнирного стержня 5420 и поддерживается в зубчатом зацеплении с ведущей шестерней 5434. Как можно наиболее детально видеть на ФИГ. 102, ведущая шестерня 5434 размещена на зубчатом стержне 5436, который поддерживается с возможностью вращения в корпусе дистального стержня 5712. Зубчатый стержень 5436 соединен со стержнем шарнирного контрольного двигателя 402 узлом соединительной муфты 5780.
Проксимальный наружный сегмент стержня 5602 вращается системой шестерней, в целом обозначенных как 5640. По меньшей мере в одной форме, к примеру, система шестерней 5640 включает ведомую шестерню 5642, которая подсоединена к проксимальному внешнему сегменту стержня 5602 и поддерживается в зубчатом зацеплении со скошенной блочной шестерней 5644, которая поддерживается с возможностью вращения внутри корпуса дистального стержня 5712. Скошенная блочная шестерня 5644 находится в зубчатом зацеплении с узлом ведущих скошенных шестерней 5646, который размещен на зубчатом стержне 5648, который также поддерживается с возможностью вращения в корпусе дистального стержня 5712. Зубчатый стержень 5648 соединен со стержнем вращения или дистальным двигателем валиков 610 узлом соединительной муфты 5780. См. ФИГ. 101. Двигатели и системы шестерней альтернативного передаточного узла 5700 могут применяться для питания и контроля хирургического инструмента способами, описанными в настоящем документе.
Системы питания и контроля
В различных формах хирургический инструмент 10 может использовать контрольную систему, в целом обозначенную как 800 для контроля различных двигателей, используемых в инструменте. Двигатели 402, 530, 560 и 610 и относящиеся к ним контрольные компоненты также могут называться в настоящем документе «приводной системой», в целом обозначенной как 398. В одной из форм приводная система 398 служит для «электрической генерации» множества контрольных движений. Термин «электрическая генерация» относится к применению электрических сигналов для активации двигателя или других электроприборов и может быть определена как отличная от контрольных движений, который генерируются вручную или иным путем без применения электрического тока. В одной форме приводная система 398 может функционально поддерживаться в блоке рукоятки, которую клиницист может держать рукой или руками. Однако, в других формах, приводная система 398 может содержать часть, которая и/или приводится в действие и/или поддерживается роботизированной системой.
В одной форме двигатели 402, 530, 560 и 610 и связанные с ними управляющие компоненты могут получать электроэнергию от батареи 802, помещенной внутри части 26 пистолетной рукоятки узла 20 рукоятки. В других конструкциях батарейка может поддерживаться роботизированной системой, например. Однако в других вариантах осуществления блок рукоятки 20 может иметь силовой кабель (не показан), выступающий оттуда для поставки питания из другого источника электроэнергии. В еще одних вариантах осуществления двигатели и электрические компоненты могут получать питание и сигналы управления от роботизированной системы. Контрольная система 800 может содержать различные компоненты контрольной системы, среди которых могут быть, например, дистальная монтажная плата 810, которая поддерживается на съемном передаточном узле 700. Дистальная монтажная плата 810 может включать электрическое коннекторы 812 и/или электрические компоненты, которые можно стерилизовать с помощью обычных методов паровой стерилизации, так же, как и другими методами стерилизации, использующими более низкие температуры. Контрольная система 800 может также включать проксимальную монтажную плату 820, которая поддерживается в части узла рукоятки 20, сформированной сегментами корпуса рукоятки 23 и 24. Проксимальная монтажная плата 820 сконструирована для электрического соединения с дистальной монтажной платой 810, когда съемный передаточный узел 700 соединен с узлом подвески двигателя 750.
Различные формы хирургического инструмента 10 могут использовать уникальную и инновационную конструкцию контрольного переключателя 830, который может быть функционально размещен внутри или поддерживаться с помощью части пистолетного захвата 26 узла рукоятки 20. Например, по меньшей мере в одной форме, конструкция контрольного переключателя 830 может включать уникальный и инновационный контрольный рычажный переключатель 840, который позволяет пользователю максимизировать функциональный контроль различных аспектов хирургического инструмента 10 с помощью одного интерфейса. Более подробно и с отсылкой ФИГ. 33-39 одна из форм контрольного рычажного переключателя 840 может включать штангу контрольного рычажного переключателя 842, которая функционально подсоединена к блоку рычажного переключателя 850, который подвижно размещен внутри узла корпуса переключателя 844. Блок корпуса переключателя 844 может быть размещен внутри части пистолетной рукоятки 26 узла рукоятки 20. По меньшей мере в одной форме, например, блок корпуса переключателя 844 может включать корпус 846 и заднюю пластину корпуса 848. Как видно в максимальных подробностях на ФИГ. 35-39, печатная монтажная плата рычажного переключателя 852 может оперативно поддерживаться на блоке рычажного переключателя 850 с помощью задней крепежной пластины 854. Задняя крепежная пластина 854 может быть сконструирована с возможностью движения вместе с узлом рычажного переключателя 850 и печатной монтажной платой 852 внутри корпуса переключателя 844. Пружина рычажного переключателя 856 может поддерживаться между задней пластиной корпуса 848 и задней крепежной пластиной 854 для смещения узла рычажного переключателя 850 и штангой контрольного рычажного переключателя 842 вперед или назад. См. Рис. 36 и 38.
Контроль рычажного переключателя 840 может быть электрически подсоединен к проксимальной монтажной плате 820 и батарее 802 контрольной системы 800 с помощью различных соединительных кабелей 864 для предоставления контрольного питания для двигателей 402, 530, 560 и 610 хирургического инструмента 10. Например, раскачивая или иным образом активируя штангу контрольного рычажного переключателя 842, пользователь может контролировать двигатель шарнирного контроля 402 и/или двигатель дистальных валиков 560 и/или двигатель проксимальных валиков 610.
Блок контрольного рычажного переключателя 850 может называться в настоящем документе «первым переключателем» для контроля одного или нескольких двигателей передаточной системы. Контрольный рычажный переключатель 840 может также включать первый датчик 860, который может содержать, к примеру, магнит, который может размещаться на печатной монтажной плате рычажного переключателя 852 для возможности перемещения по ней. Дополнительно, второй или стационарный датчик 862 может быть расположен внутри задней пластины корпуса 848. Второй датчик 862 может содержать, например, датчик «эффекта Холла» или подобное сенсорное приспособление. По меньшей мере в одной конструкции, к примеру, датчик 862 может быть сконструирован с возможностью связи с пусковым двигателем 530. Первый и второй датчики, 860, 862 могут называться в настоящем документе «вторым переключателем», в целом обозначенным как 858. Описанная выше конструкция позволяет блоку рычажного переключателя 850 аксиально перемещаться внутрь и наружу, когда пользователь нажимает на контрольную штангу рычажного переключателя 842. Путем использования движений всего рычажного переключателя 850 внутрь и наружу, по меньшей мере в одной форме, конструкция целиком состоит из переключателя внутри переключателя. В неактивированной позиции пружина рычажного переключателя 856 смещает блок рычажного переключателя 850 вперед (в дистальном направлении). Когда клиницист вдавливает рычажный переключатель 842 внутрь (проксимально), первый датчик 860 перемещается ближе ко второму датчику 862. Перемещение первого датчика 860 ближе ко второму датчику 862 приводит к активации так называемого второго переключателя 858, что может привести а действие рассекающего или пускового двигателя 530.
При выполнении процедур с применением концевого зажима 102 клиницист может захотеть открыть и закрыть блок упорного элемента 190 для перемещения целевой ткани в желаемую позицию вручную, без рассечения или разреза ткани. В одной форме, по мере того как клиницист первоначально нажимает на контрольную штангу рычажного переключателя 842, второй переключатель 858 заставляет пусковой двигатель 530 активироваться, таким образом начиная перемещение режущей ткань детали 160 в дистальном направлении. В различных формах режущая ткань деталь 160 расположена внутри концевого зажима 102, так что первоначальное движение режущей ткань детали 160 в дистальном направлении заставляет блок упорного элемента 190 закрываться (т.е. поворачиваться в сторону картриджа со скобками 130 без разреза ткани или запуска хирургических скобок). Когда клиницист отпускает контрольную штангу рычажного переключателя 842, пружина рычажного переключателя 856 сместит блок рычажного переключателя 850 дистально, таким образом перемещая первый датчик 860 от второго датчика 862. Движение датчика 860 от второго датчика 862 может снизить скорость вращения пускового двигателя 530 до тех пор, пока пусковой двигатель 530 не остановится или деактивируется. По меньше мере в одной форме конструкция второго переключателя 858 может быть сконструирована таким образом, что скорость вращения пускового двигателя 530 прямо пропорционально скоростью, с которой пользователь нажимает на контрольную штангу рычажного переключателя 842.
Когда клиницист разместил и зафиксировал нужную ткань внутри концевого зажима 102, концевой зажим 102 может быть активирован или «запущен» путем полного нажатия на контрольную штангу рычажного переключателя 842. В различных формах блок рычажного переключателя 850 может также иметь третий компрессионный переключатель 866, встроенный вовнутрь и который также контактирует с контрольной системой 800. Полное нажатие контрольной штанги рычажного переключателя 842 может привести к активации третьего переключателя 866. По меньшей мере одной форме, когда третий переключатель 866 активирован, пусковой двигатель 530 будет оставаться активированным даже когда клиницист отпускает контрольную штангу рычажного переключателя 842. После выполнения пускового такта (т.е., режущая ткань деталь 160 была выдвинута в наиболее дистальную позицию в концевом зажиме 102), пользователь может снова полностью нажать контрольную штангу рычажного переключателя 842, чтобы освободить третий переключатель 866 и таким образом вернуть контроль пускового двигателя 530 второму переключателю 858. Таким образом, если клиницист отпускает контрольную штангу рычажного переключателя 842 после того, как полностью нажал ее второй раз, пружина рычажного переключателя 856 сместит блок рычажного переключателя 850 в начальную позицию. Контрольная система 800 заставит пусковой двигатель 530 вращаться в противоположном направлении до тех пор, пока режущая ткань деталь 160 не вернется в начальную позицию, где блок упорного элемента 190 снова переместится в открытую позицию, предоставляя концевому зажиму 102 возможность освободить надрезанную ткань.
В различных формах конструкция переключателя 830 может также использовать уникальный и инновационный блок дискового контроля 870. Как можно видеть на ФИГ. 42, блок дискового контроля 870 может располагаться с возможностью вращения на дистально выступающей части ступицы 845 узла корпуса переключателя 844, таким образом, что блок дискового контроля 870 способен поворачиваться вокруг оси переключателя SA-SA. Такая позиция удобно располагает активирующую дисковую деталь 872 на блоке дискового контроля 870 в положении, где клиницист может поворачивать ее большим пальцем и/или указательным пальцем, одновременно удерживая часть пистолетного захвата 26 узла рукоятки 20. Активирующая дисковая деталь 872 может быть соединена с дисковым хомутом 874, который принимается частью ступицы 845 и может быть зафиксирован с возможностью вращения в позиции монтажным фланцем 27, сформированным сегментами рукоятки 23 и 24. Левый датчик (магнит) 876 и правый датчик (магнит) 878 расположены на дисковом хомуте 874, как показано на ФИГ. 41. Датчики 876 и 878 могут обладать противоположной полярностью. Стационарный датчик 880 может располагаться на блоке корпуса переключателя 844 таким образом, что оказывается по центру между левым датчиком 876 и правым датчиком 878. Стационарный датчик 880 может содержать, к примеру датчик «эффекта Холла» и быть подсоединенным к проксимальной монтажной плате 820 контрольной системы 800 для контроля одного из контрольных двигателей. Например, блок дискового контроля 870 может применяться для контроля, к примеру, проксимальных валиков или двигателя вращения стержня 610. В других конструкциях блок дискового контроля 870 могут быть использован для контроля двигателя дистальных валиков 560 с целью вращения концевого зажима вокруг оси стержня относительно узла удлиненного стержня. Пара центрирующих пружин 882 может использоваться для смещения дискового хомута 874 в центральную или нейтральную позицию. Когда дисковый хомут 874 находится в нейтральной позиции как показано на ФИГ. 41, вращение стержня или двигателя проксимальных валиков 610 (или двигателя дистальных роликов 560 - возможны оба варианта) деактивировано.
По мере того, как пользователь поворачивает дисковый активатор 872 в направлении по часовой стрелке в позицию, показанную на ФИГ. 43, контрольная система 800 может заставить вращающий стержень двигатель 610 вращать блок удлиненного стержня 30 вокруг оси стержня А-А в направлении по часовой стрелке. Аналогично, когда пользователь поворачивает дисковый активатор 872 в направлении против часовой стрелки в позицию, показанную на ФИГ. 44, контрольная система 800 может заставить вращающий стержень мотор 610 вращать блок удлиненного стержня 30 в направлении против часовой стрелки вокруг оси стержня А-А. Иными словами, в то время как пользователь поворачивает дисковый активатор 872 по часовой стрелке или против часовой стрелки, стационарный датчик 880 контролирует направление вращения узла удлиненного стержня 30, основанное на дальности расположения левого и правого датчиков 876, 878 относительно стационарного датчика 880. Ответ стационарного датчика 880 может быть сконфигурирован таким образом, что по мере того, как пользователь увеличивает скорость вращения дискового активатор 872, относительная скорость, с которой двигатель 610 вращает блок удлиненного стержня 30, увеличивается. Как видно на ФИГ. 41-44, стопорное утолщение 847 может быть сформировано на блоке корпуса стержня 844 для взаимодействия с прорезью 875 в дисковом хомуте для предотвращения контакта между подвижными датчиками 876, 878 и стационарным датчиком 880. Специалисты в данной области поймут, что блок дискового контроля 870 может использоваться для контроля любого другого двигателя хирургического инструмента 10. Аналогично, контроль рычажного переключателя 840 может быть сконструирован для контроля любого одного или нескольких двигателей хирургического инструмента 10. Уникальные и инновационные конструкции узла дискового контроля, описанные в настоящем документе, дают пользователю возможность иметь функциональный контроль через вращение зоны взаимодействия эргономического дискового активатора. В альтернативных формах подвижные датчики 876, 878 могут содержать датчики «эффекта Холла», каждый из которых связан с двигателем. Стационарный датчик 880 может содержать магнит.
В различных формах каждый из двигателей хирургического инструмента 10 может быть оборудован соответствующим устройством кодирования, которое связывается с микропроцессорным чипом на проксимальной монтажной плате 820. Например, двигатель контроля шарнира 402 может иметь кодирующее устройство 404, функционально подсоединенное к нему, которое связывается с проксимальной монтажной платой 820. Пусковой или надрезающий двигатель 530 может иметь кодирующее устройство 534, функционально подсоединенное к нему, которое связывается с проксимальной монтажной платой 820. Двигатель вращения концевого зажима или дистальных валиков 560 может иметь кодирующее устройство 564, функционально подсоединенное к нему, которое связывается с проксимальной монтажной платой 820. Двигатель вращения стержня или проксимальных валиков 610 может иметь кодирующее устройство 614, функционально подсоединенное к нему, которое связывается с проксимальной монтажной платой 820. Кодирующие устройства могут служить для предоставления соответствующим микропроцессорным чипам обратной связи с учетом количества оборотов и направления вращения для каждого из двигателей. В некоторых формах, в дополнение к кодирующим устройствам, блок поворотного привода 570 может использовать сенсорные конструкции для отслеживания вращения различных фрагментов стержня. Например, как видно из ФИГ. 15, 28 и 29, шкив шарнирного привода 417 может иметь первый шарнирный датчик 419, расположенный на нем и приспособленный для отслеживания вторым шарнирным датчиком 421, который может включать, например, датчик «эффекта Холла», который расположен на дистальной монтажной плате 810. Первый и второй шарнирные датчики 419, 421 служат для предоставления дополнительных данных обратной связи для отслеживания позиции вращения проксимального шарнирного стержня 420. Аналогично, шкив дистального валика 575 узла поворотного привода 570 может иметь первый датчик дистального валика 580, расположенный там, который приспособлен для обнаружения вторым датчиком дистального валика 582, который расположен на дистальной монтажной плате 810. Смотри РИС. 24, 28, и 29. Первый и второй дистальные датчики вращения 580, 582 служат для предоставления дополнительных данных обратной связи для отслеживания позиции вращения проксимального шарнирного стержня 552. Дополнительно, шкив 632 узла проксимального привода вращения 620 может иметь проксимальный датчик вращения 634, который приспособлен для обнаружения вторым проксимальным датчиком вращения 636, который расположен на дистальной монтажной плате 810. Смотри РИС. 26, 28, и 29. Первый и второй проксимальные датчики вращения 634, 636 служат для предоставления дополнительных данных обратной связи для отслеживания позиции вращения проксимального внешнего сегмента стержня 602.
Проводящие магистрали от концевого зажима к блоку рукоятки
Как обсуждалось выше, различные формы хирургического инструмента 10 могут эффективно применяться с ассортиментом различных концевых зажимов или хирургических рабочих частей, которые требуют задействования вращательных или иных движений для действий/манипуляций концевым зажимом/рабочей частью. Например, одна форма концевого зажима 102 требует вращательных управляющих движений для открытия и закрытия узла упорного элемента 190, приводящего в движения хирургические скобы и надрезанную ткань. Одна из форм концевого зажима 102 может также быть оборудована конструкцией дистального датчика для определения степени или количества закрытий, совершенных узлом упорного элемента 190 относительно картриджа с хирургическими скобками 130. Например, блок упорного элемента 190 может включать первый опорный датчик 890, который расположен на его дистальном конце. См. ФИГ. 3. Опорный датчик 890 может содержать, например, датчик эффекта Холла, сконструированный для обнаружения вторым датчиком картриджа со скобками (магнитом) 892, расположенным на дистальном конце картриджа с хирургическими скобками 130. По меньшей мере одной форме первый опорный датчик 890 может связываться с по меньшей мере одним проводником концевого зажима 894, который расположен на блоке упорного элемента 190, как показано. В одной из форм, к примеру, проводник концевого зажима 894 содержит плоскую полосу металла, которая имеет гибкий крюк 896, сформированный на ее проксимальном конце. В целом при использовании в настоящем документе, термины «проводник» или «проводящий» относятся к детали или компоненты, способным проводить через себя электричество. Проводник, например, может содержать провод или провода, гибкие проводящие полосы или металлические развертки, мультиканальный проводящий ленточный кабель и т.д. При использовании в настоящем документе термины «электрически контактирует» или «электрически связан с» означают, что компоненты сконструированы для проведения электрического тока или сигналов между ними.
Теперь, если обратиться к ФИГ. 45 и 46, можно видеть, что гибкий крюк 896 может быть сориентирован для контакта с дистальным концом 244 блокирующего штифта 242. Блокирующий штифт 242 может, к примеру, быть сконструирован из электропроводящего материала и покрыт изолирующим покрытием (например, полимер и т.д.) для электрической изоляции блокирующего штифта 242 от сегмента корпуса соединительной муфты 202, но обладать открытый кончик, сконструированный для осуществления электрического контакта с крюком 896. Дополнительно, блокирующая пружина 246 может также быть изготовлена из электропроводящего материала (например, металла). Блокирующая пружина 246 может быть подсоединена (например, припаяна и т.д.) к блокирующему штифту 242 таким образом, что блокирующий штифт 242 и блокирующая пружина 246 формируют электропроводящую соединительную магистраль для передачи электрического тока через блок соединительной муфты 200. Блокирующая пружина 246 также моет быть покрыта изоляционным материалом для ее электрической изоляции от сегмента корпуса соединительной муфты 202. Блокирующий штифт 242 и блокирующая пружина 246 могут в общем называться в настоящем документе «блок блокирующего штифта» 249. Блокирующая пружина 246 может заканчиваться на проксимальном конце 247 который сконструирован для скользящего электрического контакта с узлом проксимального проводника 250, расположенным на дистальной скобе 312 шарнирного соединения 310.
Как можно видеть на ФИГ. 8, одна форма узла проксимального проводника 250 может включать проводящий провод/провода/развертку 252 и кольцевой электрический проводник в форме, например, проводящей шайбы 254. Как видно на ФИГ. 46, проводник 252 связан с проксимальной частью проводника 256, которая выступает наружу сквозь дистальную скобу 312, для связи с проводником шарнирного соединения 258, который поддерживается гибким покрытием соединения 900, которая простирается над шарнирным соединением 310. По меньшей мере в одной форме покрытие соединения 900 включает полый корпус 902, который имеет открытый проксимальный конец 904 и открытый дистальный конец 906 и принимающий соединение паз 908, расположенный между ними. Полый корпус 902 может содержать множество ребер 910 и быть изготовленным из полимера или аналогичного не проводящего электричество материала, который способен растягиваться во всех направлениях для аккомодации движения компонентов шарнирного соединения. Однако, покрытие соединения 900 может также быть изготовлено из других пригодных материалов и конструкций, таких как гибкие микронарезные трубки и т.д. Проводник шарнирного соединения 258 может содержать, к примеру проводящий ленточный кабель, провод, провода, развертки и т.д. Как далее можно увидеть на ИГ. 46, проксимальный конец проводника шарнирного соединения 258 электрически соединен с проводником стержня 260 на проксимальном наружном сегменте стержня 602.
Как видно на ФИГ. 47 и 48, по меньшей мере в одной форме проксимальный конец проводника стержня 260 может быть сориентирован для скользящего контакта с кольцевым проводником 262, который расположен на блоке рукоятки 20. Подобная конструкция может позволить электрическому току течь между проводником стержня 260 и кольцевым проводником 262 по мере того как блок удлиненного стержня 30 вращается вокруг оси стержня А-А относительно узла рукоятки 20. Как далее можно видеть на ФИГ. 47 и 48, проводник 264 подсоединен к проводящему кольцу 262 и проходит проксимально сквозь корпус рукоятки 20. Проводник 264 может содержать провод или иной пригодный электрический проводник и иметь проксимальный конец 266, который сконструирован для гибкого контакта с кончиком левого локационного штифта 774. В частности, к примеру проксимальный конец 266 может проходить сквозь стену левого локационного гнезда 718, так что когда левый локационный штифт 774 вставлен в него, проксимальная конечная часть 266 проводника 264 осуществляет контакт с левым локационным штифтом 774. По меньшей мере в одной форме левый локационный штифт 774 изготовлен из проводящего электричество материала (металла), так что когда проксимальный конец 266 проводника 264 осуществляет контакт с ним, электрический ток может течь между этими компонентами. Дополнительно, соединительный проводник 776 служит для электрического соединения левого локационного штифта 774 к блоку проксимальной монтажной платы 820 для упрощения передачи между ними электрического тока.
Вышеописанная конструкция упрощает прохождение электрического тока между концевым зажимом или хирургической рабочей части, которая была подсоединена к блоку удлиненного стержня 30 хирургического инструмента 10 и компонентами контрольной системы, расположенными в блоке рукоятки 20 хирургического инструмента 10. Эта соединительная магистраль удерживается, одновременно также удерживая способность вращать концевой зажим относительно узла удлиненного стержня, активировать концевой зажим относительно узла удлиненного стержня и вращать концевой зажим и блок удлиненного стержня как единое целое. Покрытие соединения 900 может предоставлять магистраль электрической коммуникации между удлиненным стержнем и концевым зажимом. Покрытие соединения 900 может содержать электрическую гибкую полосу, провод, развертку и т.д. для проведения более чем одного сигнала для электрической коммуникации. Таким образом, множество различных датчиков или электрических компонентов может использоваться в концевом зажиме для предоставления различных форм обратной связи пользователю. Например, датчики могут быть использованы для определения количества циклов использования, отслеживания продвижения режущего инструмента внутри концевого зажима во время запуска, предоставлять обратную связь контрольной системе для автоматического контроля различных двигателей в блоке рукоятки и т.д.
ФИГ. 49 иллюстрирует альтернативное шарнирное соединение 310, которое сконструировано для разрешения прохода через него электрического тока или сигналов. В этой форме дистальный электрический проводник соединения 270 проведен сквозь дистальную скобу 312' для контакта с дистальной металлической шайбой 272, встроенной туда как показано. Проксимальная скоба 330' может иметь проксимальную металлическую шайбу 274, расположенную там для вращательного контакта с дистальной металлической шайбой 272, в то время как дистальная скоба 312' подсоединена к проксимальной скобе 330'' способом, описанным выше. Проксимальная металлическая шайба 274 может быть изогнутой или скошенной для удержания контакта между шайбами 272, 274. Проксимальный электрический проводник соединения 276 в форме, к примеру, контактной полосы, провода или развертки присоединен к шайбе 274 и сконструирован для электрического контакта с проводником стержня 260 на проксимальном внешнем сегменте стержня 602. Таким образом, подобная конструкция упрощает прохождение электрического тока/сигналов от концевого зажима 102 через блокирующий штифт 242, блокирующую пружину 242 (т.е. блок блокирующего штифта 249), проводящего кольца 252, дистальный электрический проводник соединения 270, шайбы 272, 274 и проксимальный электрический проводник соединения 276 к проводнику стержня 260.
Альтернативные конструкции шарнирного соединения
Другая форма шарнирного соединения 1000 показана на ФИГ. 50-53. Подобное шарнирное соединение 1000 может упростить шарнирный поворот и вращение концевого зажима или хирургической рабочей части, подсоединенной там относительно оси стержня А-А удлиненного стержня, к котором подсоединено шарнирное соединение 1000. Шарнирное соединение также может упрощать подобные движения концевого зажима или хирургической рабочей части, одновременно также предоставляя вращательные управляющие движения концевого зажима/рабочей части для их активации или манипуляций ими. Шарнирное соединение 1000 может быть подсоединено к блоку удлиненного стержня, аналогичного по конструкции блоку удлиненного стержня 30, описанному выше, или оно может быть подсоединено к другим пригодным узлам стержня. Блок удлиненного стержня может быть присоединен к блоку рукоятки, в котором размещено множество двигателей. Один двигатель может быть использован для передачи контрольных движений к гибкой кабельной детали 1010, которая проходит через блок удлиненного стержня и которая функционально подсоединена к шарнирному соединению 1000. Например, гибкий кабель 1010 может быть подсоединен к блоку шпули или шкива, который функционально подсоединен или связывается со стержнем соответствующего двигателя таким образом, что действие двигателя приводит к активации кабеля 1010. Блок рукоятки может также содержать пусковой двигатель, который функционально подсоединен к проксимальному пусковому стержню 1030, который проходит сквозь блок удлиненного стержня для взаимодействия с шарнирным соединением 1000, как будет более подробно описано ниже. Блок рукоятки может также содержать двигатель, который функционально взаимодействует с концевым зажимом или дистальным вращательным стержнем 1040, который передает вращательное контрольное движение к шарнирному соединению 1000, которое может быть использован для вращения концевого зажима или хирургической рабочей части вокруг оси стержня А-А относительно удлиненного стержня. Блок рукоятки может также включать проксимальный вращающий двигатель, который используется для вращения узла удлиненного стержня вокруг оси стержня А-А способом, описанным выше.
По меньшей мере в одной форме шарнирное соединение 1000 может содержать блок проксимальной скобы 1020, который подсоединен к или сформирован на конце узла удлиненного стержня. В конструкции, показанной на ФИГ. 50-53 блок проксимальной скобы 1020 сформирован на дистальном конце узла удлиненного стержня 30'. Как видно на указанных фигурах, блок проксимальной скобы 1020 имеет дистальную концевую стену 1022 и пару разделенных промежутком рычагов скобы 1024, 1026. Проксимальная скоба 1020 сконструирована для подсоединения с возможностью поворота к дистальной скобе 1050 поворотным стержнем 1051, который служит для определения шарнирной оси В-В. Шарнирная ось В-В может быть по существу перпендикулярна оси стрежня А-А.
Дистальная скоба 1050 имеет гнездо 1052, сформированное на ней и пару рычагов дистальной скобы 1054, 1056. Поворотный стержень 1051 проходит по центру через рычаги скобы 1024, 1054, 1056 и 1026 как показано на ФИГ. 53. Рычаг скобы 1054 может иметь кабельный шкив 1058, сформированный на ней, к которому подсоединен гибкий кабель 1010. Таким образом, вращение кабеля 1010 соответствующим ему двигателем приведет к вращению дистальной скобы 1050 относительно проксимальной скобы 1020 вокруг шарнирной оси В-В.
В различных формах шарнирное соединение 1000 может также содержать вращающуюся монтажную ступицу 1060, которая принимается с возможностью вращения в гнездо 1052. Монтажная ступица 1060 может иметь кольцевую шестерню 1062, присоединенную к ней, которая приспособлена к зубчатому зацеплению с дистальной вращающейся выходной шестерней 1064. Дистальная вращающаяся выходная шестерня 1064 присоединена к выходному стержню 1066, который поддерживается с возможностью вращения на концевой стене 1053 дистальной скобы 1050. Выходной стержень 1066 имеет дистальную вращающуюся выходную шестерню 1068, подсоединенную к нему. Дистальная вращающаяся выходная шестерня 1068 поддерживается в зубчатом зацеплении с дистальной вращающейся передаточной шестерней 1070, которая установлена возможностью вращения на поворотном стержне 1051 и находится в зубчатом зацеплении с дистальной вращающейся входной шестерней 1072. Дистальная вращающаяся входная шестерня 1072 расположена на дистальном вращающемся стержне 1040. Дистальная вращающаяся выходная шестерня 1068, дистальная вращающаяся передаточная шестерня 1070 и дистальная вращающаяся входная шестерня 1072 называются в настоящем документе «дистальная вращающаяся система шестерней», в целом обозначенная как 1069. Дистальная вращающаяся передаточная шестерня 1070 «свободно вращается» на поворотном стержне 1051 таким образом, что вращение дистального вращающегося стержня 1040 в конечном счете приводит к вращению дистальной ведущей шестерни 1064 без вращения поворотного стержня 1051. Вращение дистальной вращающейся выходной шестерни 1064 внутри кольцевой шестерни 1062 приводит к вращению монтажной ступицы 1060 вокруг оси стержня А-А. В различных формах концевой зажим или хирургическая рабочая часть могут быть напрямую подсоединены к монтажной ступице 1060 таким образом, что вращение монтажной ступицы 1060 приводит к вращению концевого зажима/рабочей части. Например, монтажная ступица 1060 может быть сформирована с гнездом ступицы 1061, которая подобрана по размеру для удерживающего приема части концевого зажима/рабочей части. В альтернативном варианте осуществления монтажная ступица 1060 может содержать интегральную часть концевого зажима или концевой зажим может быть подсоединен к монтажной ступице 1060 другими крепежными конструкциями. Например, монтажная ступица 1060 может быт подсоединена к блоку соединительной муфты, относящемуся к типу и конструкции, описанным выше, и затем концевой зажим/рабочая часть могут быть обратимо подсоединены к блоку соединительной муфты.
Шарнирное соединение 1000 может также сделать более удобной передачу вращательного контрольного движения через соединение 1000 к подсоединенному к нему концевому зажиму/рабочей части. Как можно видеть на ФИГ. 52 и 53, дистальный конец проксимального пускового стержня 1030 поддерживается с возможностью вращения на дистальной концевой стене 1022 узла проксимальной скобы 1020 и имеет присоединенную вводную пусковую шестерню 1080. Вводная пусковая шестерня 1080 находится в зубчатом зацеплении с пусковой передаточной шестерней 1082, которая установлена на поворотном стержне 1051. Пусковая передаточная шестерня 1082 находится в зубчатом зацеплении с пусковой выходной шестерней 1084, которая расположена на выходном пусковом стержне 1090, который смонтирован на концевой стене 1053 дистальной скобы 1050. Пусковой выходной стержень 1090 может быть сконструирован для приводного взаимодействия с соответствующей ведущей деталью или стержнем на концевом зажиме/рабочей части. Например, дистальному концу 1092 пускового выходного стержня 1090 можно придать шестиугольную форму, так что он может быть принять соответствующим шестиугольным гнездом, сформированным на монтажном фланце 1094, который может быть сконструирован для подсоединения к приводному стержню концевого зажима/рабочей части. Пусковая вводная шестерня 1080, пусковая передаточная шестерня 1082 и пусковая выходная шестерня 1084 называются в настоящем документе «система шестерней пускового стержня», в целом обозначенная как 1081. Пусковая передаточная шестерня 1082 «свободно вращается» на поворотном стержне 1051, так что вращение проксимального пускового стержня 1030 в конечном итоге приводит к вращению пускового выходного стержня 1090 без вращения поворотного стержня 1051. Система шестерней дистального валика 1069 и система шестерней пускового стержня 1081 полностью «гнездятся» вместе и упрощают шарнирное вращение концевого зажима/рабочей части относительно узла удлиненного стержня, одновременно упрощая передачу вращательных контрольных движений к концевому зажиму и одновременно упрощая вращение концевого зажима относительно оси стержня А-А.
ФИГ. 54-60 иллюстрируют другую альтернативную конструкцию шарнирного соединения 1100. По меньшей мере в одной форме шарнирное соединение 1100 может включать проксимальную скобу 1110, центральную скобу 1130 и дистальную скобу 1150. Шарнирное соединение 1100 может быть сконструировано для упрощения шарнирного вращения концевого зажима или хирургической рабочей части, подсоединенного к нему, вокруг двух разных шарнирных осей В-В и С-С, которые по существу перпендикулярны по отношению друг к другу, равно как и к оси стержня А-А узла удлиненного стержня 30'', к которому оно подсоединено. Например, шарнирное соединение 1100 может быть сконструировано таким образом, что центральная скоба 1130 может поворачиваться вокруг первой шарнирной оси В-В относительно первой скобы 1110 и дистальная скоба 1150 может избирательно поворачиваться вокруг второй шарнирной оси С-С относительно центральной скобы 1130. Шарнирное соединение 1100 также может упрощать подобные движения концевого зажима или хирургической рабочей части, одновременно также предоставляя вращательные управляющие движения концевого зажима/рабочей части для их активации или манипуляций ими.
Шарнирное соединение 1100 может быть подсоединено к блоку удлиненного стержня, аналогичного по конструкции блоку удлиненного стержня 30, описанному выше, или оно может быть подсоединено к другим пригодным узлам стержня. В одной конструкции проксимальная скоба 1110 встроена во внешнюю тубу узла удлиненного стержня 30''. Как видно на ФИГ. 54-60, проксимальная скоба 1110 имеет верхний рычаг проксимальной скобы 1112 и нижний рычаг проксимальной скобы 1114. Центральная скоба 1130 также имеет верхний рычаг центральной скобы 1132 и нижний рычаг центральной скобы 1134. Верхний рычаг проксимальной скобы подсоединен с возможностью поворота к верхнему рычагу центральной скобы 1132 проксимальным поворотным штифтом 1116. Проксимальный поворотный штифт 1116 также подсоединяет с возможностью поворота нижний рычаг проксимальной скобы 1114 к нижнему рычагу центральной скобы 1134. Проксимальный поворотный штифт 1116 служит для определения первой шарнирной оси В-В.
Также по меньшей мере в одной конструкции центральная скоба 1130 имеет правый рычаг центральной скобы 1136 и левый рычаг центральной скобы 1138. Дистальная скоба 1150 имеет правый рычаг дистальной скобы 1152 и правый рычаг дистальной скобы 1154. Правый рычаг центральной скобы 1136 подсоединен с возможностью поворота к правому рычагу дистальной скобы 1152 дистальным поворотным штифтом 1156. Левый рычаг центральной скобы 1138 подсоединен с возможностью поворота к левому рычагу дистальной скобы 1154 дистальным поворотным штифтом 1156. Дистальный поворотный штифт 1156 определяет вторую шарнирную ось С-С. В одной из конструкций дистальный поворотный штифт 1156 подсоединен без возможности поворота к правому и левому рычагам дистальной скобы 1152, 1154, так что дистальный поворотный штифт 1156 вращается с дистальной скобой 1150 относительно центральной скобы 1130.
Блок удлиненного стержня 30'' может быть присоединен к блоку рукоятки, в котором размещено множество двигателей. Один двигатель может быть использован для передачи контрольных движений к первой гибкой кабельной детали 1170, которая проходит через блок удлиненного стержня 30'' и которая функционально подсоединена к шарнирному соединению 1100. Например, первый гибкий кабель 1170 может быть подсоединен к первой шпуле или блоку шкива, который функционально подсоединен или связывается со стержнем соответствующего двигателя таким образом, что действие двигателя приводит к активации первого кабеля 1170.
В одной конструкции первый гибкий кабель 1170 может применяться для избирательного поворота центральной скобы 1130 относительно проксимальной скобы 1110 вокруг первой шарнирной оси В-В. В подобной конструкции, к примеру, первый кабель 1170 проходит вокруг первого шкива или шпули 1180, который присоединен к центральной скобе 1130. Например, первый шкив 1180 подсоединен к верхнему рычагу центральной скобы 1132 и установлен с возможностью поворота на проксимальном поворотном штифте 1116. Активация первого кабеля 1170 заставит центральную скобу 1130 повернуться относительно проксимальной скобы 1110 вокруг первой шарнирной оси В-В.
Шарнирное соединение 1100 может также задействовать второй гибкий кабель 1190, который принимается на блок шпули или шкива, который функционально подсоединен или связывается со стержнем соответствующего двигателя внутри рукоятки таким образом, что действие двигателя приводит к активации второго кабеля 1190. Второй гибкий кабель 1190 может применяться для избирательного поворота дистальной скобы 1150 относительно центральной скобы 1130 вокруг второй шарнирной оси С-С. В подобной конструкции, к примеру, второй кабель 1190 проходит вокруг второго шкива или шпули 1158, который присоединен без возможности вращения к дистальному поворотному штифту 1156. Активация второго кабеля 1190 приведет к вращению дистального поворотного штифта 1156 и дистальной скобы 1150, подсоединенной к нему, вокруг второй шарнирной оси С-С относительно центральной скобы 1130.
Шарнирное соединение 1100 может также сделать более удобной передачу вращательного контрольного движения через соединение 1100 к подсоединенному к нему концевому зажиму/рабочей части. Проксимальный вращательный пусковой стержень 1200 может проходить через блок удлиненного стержня 30'' и быть функционально подсоединен к пусковому двигателю в блоке рукоятки для передачи к нему вращательных пусковых движений. В одной конструкции проксимальный пусковой стержень 1200 может быть полым, так что второй кабель 1190 может проходить сквозь него. Проксимальный пусковой стержень 1200 может функционально взаимодействовать с проксимальной пусковой системой шестерней 1210, функционально поддерживаемой на шарнирном соединении 1100. Например, в одной конструкции первая пусковая система шестерней 1210 может содержать проксимальную вводную пусковую шестерню 1212, которая подсоединена к проксимальному пусковому стержню 1200. Проксимальная вводная пусковая шестерня 1212 ориентирована в зубчатом зацеплении с проксимальной пусковой передаточной шестерней 1214, которая установлена на поворотном стержне 1116, так что она может свободно вращаться. Проксимальная пусковая передаточная шестерня 1212 ориентирована в зубчатом зацеплении с проксимальной пусковой выходной шестерней 1216, которая расположена на центральном пусковом стержне 1218, который проходит с возможностью вращения сквозь центральную сеть 1131 центральной скобы 1130.
Шарнирное соединение 1100 может также содержать дистальную пусковую систему шестерней 1220, которая совместно работает с проксимальной пусковой системой шестерней 1210 для передачи вращательного пускового или контролирующего движения через шарнирное соединение 1100. Дистальная пусковая система шестерней 1220 может содержать дистальную вводную пусковую шестерню 1222, которая расположена на центральном пусковом стержне 1216. Дистальная вводная пусковая шестерня 1222 находится в зубчатом зацеплении с дистальной пусковой передаточной шестерней 1224, которая установлена с возможностью вращения на дистальном поворотном штифте 1156, так что она может свободно вращаться на нем. Дистальная пусковая передаточная шестерня 1224 находится в зубчатом зацеплении с дистальной пусковой выходной шестерней 1226, которая установлена с возможностью вращения внутри дистальной скобы 1150. Дистальная пусковая выходная шестерня 1226 может быть сконструирована для приводного взаимодействия с соответствующей ведущей деталью или стержнем на концевом зажиме/рабочей части.
Другая форма шарнирного соединения 1300 показана на ФИГ. 61-66. Подобное шарнирное соединение 1300 может упростить шарнирный поворот и вращение концевого зажима или хирургической рабочей части, подсоединенной там относительно оси стержня А-А удлиненного стержня, к котором подсоединено шарнирное соединение 1300. Шарнирное соединение также может упрощать подобные движения концевого зажима или хирургической рабочей части, одновременно также предоставляя вращательные управляющие движения концевого зажима/рабочей части для их активации или манипуляций ими. Шарнирное соединение 1300 может быть подсоединено к блоку удлиненного стержня, аналогичного по конструкции блоку удлиненного стержня 30, описанному выше, или оно может быть подсоединено к другим пригодным узлам стержня. Блок удлиненного стержня может быть присоединен к блоку рукоятки, в котором размещено множество двигателей. Один двигатель может быть использован для передачи контрольных движений к гибкому кабелю 1310, который проходит через блок удлиненного стержня и который функционально подсоединен к шарнирному соединению 1300. Например, гибкий кабель 1310 может быть подсоединен к блоку шпули или шкива, который функционально подсоединен или связывается со стержнем соответствующего двигателя таким образом, что действие двигателя приводит к активации кабеля 1310. Блок рукоятки может также содержать пусковой двигатель, который функционально подсоединен к проксимальному пусковому стержню 1330, который проходит сквозь блок удлиненного стержня для взаимодействия с шарнирным соединением 1300, как будет более подробно описано ниже. Блок рукоятки может также содержать двигатель, который функционально взаимодействует с гибким дистальным вращательным стержнем 1340, который передает вращательное контрольное движение к шарнирному соединению 1300, которое может быть использован для вращения концевого зажима или хирургической рабочей части вокруг оси стержня А-А относительно удлиненного стержня. Блок рукоятки может также включать проксимальный вращающий двигатель, который используется для вращения узла удлиненного стержня вокруг оси стержня А-А способом, описанным выше.
По меньшей мере в одной форме шарнирное соединение 1300 может содержать блок проксимальной скобы 1320, который подсоединен к или сформирован на конце узла удлиненного стержня. В конструкции, показанной на ФИГ. 61-66 блок проксимальной скобы 1320 сформирован на дистальном конце внешней тубы, формирующей часть узла удлиненного стержня 30'. Как видно на указанных фигурах, блок проксимальной скобы 1320 имеет дистальную концевую стену 1322 и пару разделенных промежутком рычагов скобы 1324, 1326. Проксимальная скоба 1320 сконструирована для подсоединения с возможностью поворота к дистальной скобе 1350 верхним поворотным стержнем 1351 и нижним поворотным стержнем 1353, который служит для определения шарнирной оси В-В. Шарнирная ось В-В по существу перпендикулярна оси стрежня А-А.
Дистальная скоба 1350 имеет гнездо 1352, сформированное на ней и пару рычагов дистальной скобы 1354, 1356. Верхний поворотный стержень 1351 проходит по центру через рычаги скобы 1324 и 1354. Нижний поворотный стержень 1353 проходит через рычаги скобы 1356 и 1026 как показано на ФИГ. 64. Рычаг скобы 1356 также может иметь кабельный шкив 1358, сформированный на нем или присоединенный к нему. Гибкий кабель 1310 подсоединен к кабельному шкиву 1358 таким образом, что активация кабеля 1310 приведет к шарнирному вращению дистальной скобы 1350 вокруг шарнирной оси В-В относительно проксимальной скобы 1320.
В различных формах шарнирное соединение 1300 может также содержать вращающуюся монтажную ступицу 1360, которая принимается с возможностью вращения в гнездо 1052. Монтажная ступица 1060 может иметь приводную шестерню 1362, присоединенную к ней, которая приспособлена к зубчатому зацеплению с дистальной вращающейся выходной шестерней 1364. Дистальная вращающаяся выходная шестерня 1364 присоединена к выходному стержню 1366, который поддерживается с возможностью вращения на концевой стене 1355 дистальной скобы 1350. По меньшей мере в одной конструкции дистальная вращающаяся выходная шестерня 1364 управляется гибким дистальным вращающимся стержнем 1340, который проходит сквозь проксимальный поддерживающий стержень 1342, проходя через блок удлиненного стержня 30''. В различных формах концевой зажим или хирургическая рабочая часть может быть подсоединена напрямую к монтажной ступице 1360 так, что вращение монтажной ступицы 1360 приводит к вращению концевого зажима/рабочей части. Например, монтажная ступица 1360 может быть сформирована с гнездом ступицы 1361, которая подобрана по размеру для удерживающего приема части концевого зажима/рабочей части. В альтернативном варианте осуществления монтажная ступица 1360 может содержать интегральную часть концевого зажима или концевой зажим может быть подсоединен к монтажной ступице 1360 другими крепежными конструкциями. Например, монтажная ступица 1360 может быть подсоединена к блоку соединительной муфты, относящемуся к типу и конструкции, описанным выше, и затем концевой зажим/рабочая часть могут быть обратимо подсоединены к блоку соединительной муфты.
Шарнирное соединение 1300 может также сделать более удобной передачу вращательного контрольного движения через соединение 1300 к подсоединенному к нему концевому зажиму/рабочей части. Как можно видеть на ФИГ. 63 и 64, дистальный конец проксимального пускового стержня 1330 поддерживается с возможностью вращения на дистальной концевой стене 1322 узла проксимальной скобы 1320 и имеет присоединенную входную пусковую шестерню 1380. Вводная пусковая шестерня 1380 находится в зубчатом зацеплении с пусковой передаточной шестерней 1382, которая установлена на нижнем поворотном стержне 1353. Пусковая передаточная шестерня 1382 находится в зубчатом зацеплении с пусковой выходной шестерней 1384, которая расположена на выходном пусковом стержне 1390, который проходит сквозь концевую стену 1355 дистальной скобы 1350 и концевую стену 1370 монтажной ступицы 1360. Пусковой выходной стержень 1390 может быть сконструирован для приводного взаимодействия с соответствующей ведущей деталью или стержнем на концевом зажиме/рабочей части. Например, дистальному концу 1392 пускового выходного стержня 1390 можно придать шестиугольную форму, так что он может быть принять соответствующим шестиугольным гнездом, сформированным на монтажном фланце 1394, который может быть сконструирован для подсоединения к приводному стержню концевого зажима/рабочей части. Пусковая входная шестерня 1380, пусковая передаточная шестерня 1382 и пусковая выходная шестерня 1384 называются в настоящем документе системой шестерней пускового стержня, в целом обозначенной как 1381. Пусковая передаточная шестерня 1382 «свободно вращается» на нижнем поворотном стержне 1353, так что вращение проксимального пускового стержня 1330 в конечном итоге приводит к вращению пускового выходного стержня 1390 без вращения нижнего поворотного стержня 1353. Дистальная вращающаяся система шестерней 1369 и система шестерней пускового стержня 1381 упрощают шарнирное вращение концевого зажима/рабочей части относительно узла удлиненного стержня, в то же время упрощая передачу вращательных контрольных движений к концевому зажиму и одновременно упрощая вращение концевого зажима относительно оси стержня А-А.
Альтернативные блоки подвески двигателя
ФИГ. 67-69 иллюстрируют альтернативные блоки подвески двигателя, в целом обозначенные как 1750. Блок подвески двигателя 1750 может поддерживаться внутри сегментов корпуса рукоятки 23 и 24, которые способны соединяться между собой защелками, винтами и т.д. и служат для формирования части пистолетного захвата 26 узла рукоятки 20. По меньшей мере в одной форме блок подвески двигателя 1750 может включать корпус двигателя 1752, который поддерживается с возможностью обратимого соединения внутри сегментов корпуса рукоятки 23 и 24. По меньшей мере в одной форме, к примеру, корпус двигателя 1752 имеет блок опоры двигателя 1756, подсоединенный к нему. Корпус двигателя 1752 служит для поддержания двигателей 402, 530, 560 и 610. Каждый двигатель имеет свою контрольную плату 1780, подсоединенную к нему для контроля действий каждого двигателя различными способами, описанными в настоящем документе.
В некоторых формах рабочая часть 100 может содержать электрохирургический концевой зажим, использующий электроэнергию для обработки ткани. Примеры электрохирургических концевых зажимов и связанных с ними инструментов описаны в заявке на патент США № 13/536393, озаглавленной «Конструкции браншей и электродов хирургического концевого зажима», досье патентного поверенного № END7137USNP/120141 и заявке на патент США № 13/536417, озаглавленной «Электродные компоненты для хирургических инструментов с поворотным приводом», досье патентного поверенного № END7149USNP/120153, оба документа полностью включены в настоящий документ путем ссылки. ФИГ. 70-73 иллюстрируют пример концевого зажима 3156 с альтернативной рабочей частью 100. Концевой зажим 3156 может быть приспособлен для захвата и рассечения ткани и для одновременного сплавления захваченной ткани путем управляемой подачи энергии (например, радиочастотной (РЧ) энергии). Первая бранша 3160A и вторая бранша 3160B могут закрываться, посредством этого захватывая или зацепляя ткань по продольной оси 3194, образованной аксиально подвижным элементом 3182. Первая бранша 3160A и вторая бранша 3160B также могут прикладывать сжимающее воздействие к ткани.
ФИГ. 70 демонстрирует вид в перспективе некоторых форм электрического хирургического концевого зажима 3156 для применения с хирургическим инструментом 10. ФИГ. 70 показывает концевой зажим 3156 с браншами 3160А, 3160В в открытой позиции. ФИГ. 71 демонстрирует вид в перспективе некоторых форм концевого зажима 3156 с браншами 3160А, 3160В в закрытой позиции. Как было указано ранее, концевой зажим 3156 может содержать верхнюю первую браншу 3160A и нижнюю вторую браншу 3160B, которые могут быть прямыми или изогнутыми. Первая бранша 3160A и вторая бранша 3160B могут содержать удлиненный паз или канал 3162A и 3162B (ФИГ. 70) соответственно, расположенные снаружи вдоль их соответствующих средних частей. Кроме того, первая бранша 3160A и вторая бранша 3160B могут иметь захватывающие ткань элементы, например, такие как зубцы 3198, расположенные на внутренних частях первой бранши 3160A и второй бранши 3160B. Первая бранша 3160A может содержать, например, корпус верхней первой бранши 3200A с обращенной наружу верхней первой поверхностью 3202A и подающей энергию верхней первой поверхностью 3204A. Вторая бранша 3160B может содержать корпус нижней второй бранши 3200B с обращенной наружу нижней второй поверхностью 3202B и подающей энергию нижней второй поверхностью 3204B. Первая подающая энергию поверхность 3204A и вторая подающая энергию поверхность 3204B могут проходить вокруг дистального конца концевого зажима 3156, образуя структуру U-образной формы. Следует понимать, что концевой зажим 3156 может быть выполнен с возможностью вращения и шарнирного движения в манере, аналогичной описанной в настоящем документе относительно концевого зажима 102.
На ФИГ. 72 представлена одна форма подвижного относительно оси элемента 3182 концевого зажима 3156. Подвижный относительно оси элемент 3182 перемещается с помощью резьбового приводного стержня 3151 (ФИГ. 70) Проксимальный конец резьбового приводного стержня 3151 может быть сконструирован для подсоединения без возможности вращения к выходному гнезду 238 и таким образом получать вращательное движение, предоставленное двигателем 530. Подвижный относительно оси элемент 3182 может содержать резьбовую глухую гайку 3153 для приема резьбового приводного стержня 3151, так что вращение резьбового приводного стержня 3151 заставляет перемещаемый по оси элемент 3182 перемещаться дистально и проксимально вдоль оси 3194 (ФИГ. 72). Перемещаемый по оси элемент 3182 может содержать одну или несколько частей, но в любом случае он может быть способен двигаться или поступательно перемещаться относительно удлиненного стержня 158 и/или элементов бранши 3160A, 3160B. Кроме того, по меньшей мере в некоторых формах перемещаемый по оси элемент 3182 может быть изготовлен из упрочненной осаждением нержавеющей стали 17-4. Дистальный конец перемещаемого по оси элемента 3182 может содержать двутавровый элемент с фланцами, выполненный с возможностью скольжения внутри каналов 3162A и 3162B в элементах бранши 3160A и 3160B. Перемещаемый по оси элемент 3182 может скользить внутри каналов 3162A, 3162B, открывая и закрывая первый элемент бранши 3160A и второй элемент бранши 3160B. Дистальный конец перемещаемого по оси элемента 3182 также может содержать верхний фланец, или c-образную часть 3182A, и нижний фланец, или c-образную часть 3182B. Фланцы 3182A и 3182B соответственно образуют внутренние криволинейные поверхности 3206A и 3206B для зацепления обращенных наружу поверхностей первого элемента бранши 3160A и второго элемента бранши 3160B. Открытие-закрытие элементов бранши 3160A и 3160B может прилагать очень сильное сжимающее усилие к ткани благодаря использованию кулачковых механизмов, которые могут включать перемещаемый по оси двутавровый элемент 3182 и обращенные наружу поверхности 3208A, 3208B элементов бранши 3160A, 3160B.
Более конкретно, как показано на ФИГ. 70-72, внутренние криволинейные поверхности 3206А и 3206A дистального конца перемещаемого по оси элемента 3182 в совокупности могут быть выполнены с возможностью скользящего зацепления с первой обращенной наружу поверхностью 3208A и второй обращенной наружу поверхностью 3208B первого элемента бранши 3160A и второго элемента бранши 3160B соответственно. Канал 3162A в первом элементе бранши 3160A и канал 3162B во втором элементе бранши 3160B могут быть выполнены по форме и размеру с возможностью обеспечивать движение перемещаемого по оси элемента 3182, который может содержать режущий ткань элемент 3210, например, содержащий острый дистальный край. На ФИГ. 71, например, представлен дистальный конец перемещаемого по оси элемента 3182, продвинутого по меньшей мере частично через каналы 3162A и 3162B (ФИГ. 70). Продвижение перемещаемого по оси элемента 3182 может закрывать концевой зажим 3156, находящийся в открытой конфигурации, показанной на ФИГ. 70. В закрытом положении, показанном на ФИГ. 71, верхний первый элемент бранши 3160A и нижний второй элемент бранши 3160B образуют зазор или расстояние D между первой поверхностью для подачи энергии 3204A и второй поверхностью для подачи энергии 3204B первого элемента бранши 3160A и второго элемента бранши 3160B соответственно. В различных формах расстояние D может составлять, например, от приблизительно 0,0005 дюйма до приблизительно 0,040 дюйма, а в некоторых формах, например, от приблизительно 0,001 дюйма до приблизительно 0,010 дюйма. Кроме того, края первой поверхности для подачи энергии 3204A и второй поверхности для подачи энергии 3204B могут быть скруглены для предотвращения рассечения ткани.
На ФИГ. 73 представлен вид в разрезе некоторых форм концевого зажима 3156. Зацепляющая или контактирующая с тканью поверхность 3204B нижнего элемента бранши 3160B выполнена с возможностью подачи энергии к ткани, по меньшей мере частично, через кондуктивно-резистивный матрикс, такой как корпус с переменным, обладающим положительным температурным коэффициентом (ПТК) сопротивлением. По меньшей мере на одном из верхнего и нижнего элемента бранши 3160A, 3160B может располагаться по меньшей мере один электрод 3212, выполненный с возможностью подачи энергии от генератора 3164 к захваченной ткани. На захватывающей или контактирующей с тканью поверхности 3204A верхнего элемента бранши 3160A может располагаться аналогичный кондуктивно-резистивный матрикс (т. е. материал с ПТК), или в некоторых формах поверхность может представлять собой, например, проводящий электрод или изолирующий слой. Альтернативно на зацепляющих поверхностях элементов бранши могут располагаться любые компоненты для подачи энергии, описанные в патенте США № 6,773,409, поданном 22 октября 2001 г., озаглавленном «СТРУКТУРА ЭЛЕКТРОХИРУРГИЧЕСКИХ БРАНШЕЙ ДЛЯ КОНТРОЛИРУЕМОЙ ПОДАЧИ ЭНЕРГИИ», описание которого полностью включено в настоящий документ путем ссылки.
Каждая из первой подающей энергию поверхности 3204A и второй подающей энергию поверхности 3204B может находиться в электрической связи с генератором 3164. Генератор 3164 связан с концевым зажимом 3156 с помощью пригодного передатчика, такого как проводники 3172, 3174. В некоторых формах генератор 3164 соединен с контроллером, таким как, например, блок управления 3168. В различных формах блок управления 3168 может быть выполнен внутри генератора 3164 или может представлять собой модуль с отдельной схемой или отдельное устройство, электрически соединенные с генератором 3164 (данный вариант показан для иллюстрации пунктиром). Генератор 3164 может выполнен в виде внешней части оборудования и/ или может быть встроен внутрь хирургического инструмента 10.
Первая поверхность для подачи энергии 3204A и вторая поверхность для подачи энергии 3204B могут быть выполнены с возможностью приведения в контакт с тканью и подачи электрической энергии к захваченной ткани, обеспечивая герметизацию или сварку ткани. Блок управления 3168 регулирует электрическую энергию, подаваемую электрическим генератором 3164, который, в свою очередь, подает энергию для электрохирургии к первой поверхности для подачи энергии 3204A и второй поверхности для подачи энергии 3204B. Блок управления 3168 может регулировать мощность, создаваемую генератором 3164 в течение процесса активации.
Как указано выше, энергия для электрохирургии, подаваемая электрическим генератором 3164 и регулируемая или иным образом контролируемая блоком управления 3168, может представлять собой радиочастотную (РЧ) энергию или другие подходящие формы электрической энергии. Кроме того, противостоящие первая и вторая поверхности для подачи энергии 3204A и 3204B могут иметь корпуса с переменным, обладающим положительным температурным коэффициентом (ПТК) сопротивлением, которые находятся в электрической связи с генератором 3164 и узлом управления 3168. Дополнительная информация относительно электрохирургических концевых зажимов, механизмов закрытия браншей и электрохирургических поверхностей для подачи энергии описана в следующих патентах США и опубликованных заявках на патент: патенте США №№ 7,087,054; 7,083,619; 7,070,597; 7,041,102; 7,011,657; 6,929,644; 6,926,716; 6,913,579; 6,905,497; 6,802,843; 6,770,072; 6,656,177; 6,533,784; и 6,500,176; и опубликованных заявках на патент США № №№ 2010/0036370 и 2009/0076506, все перечисленные документы включены в настоящий документ во всей полноте путем ссылке и являются частью этой спецификации.
Пригодный генератор 3164 доступен в виде модели номер GEN11 от компании Ethicon Endo-Surgery, Inc., Cincinnati, Ohio. Также, в некоторых формах, генератор 3164 можно реализовать в виде электрохирургического узла (ESU), способного подавать мощность, достаточную для осуществления биполярной электрохирургии с использованием радиочастотной (РЧ) энергии. В некоторых формах ESU может представлять собой биполярное устройство ERBE ICC 350, доступное в продаже от компании ERBE USA, Inc., г. Мариетта, штат Джорджия. В некоторых формах, например, при применении в биполярной электрохирургии, можно использовать хирургический инструмент, имеющий активный электрод и возвратный электрод, причем активный и возвратный электроды могут быть расположены вплотную, смежно и/или в электрическом контакте с обрабатываемой тканью, чтобы ток мог идти от активного электрода через корпуса с положительным температурным коэффициентом (ПТК) и к возвратному электроду через ткань. Таким образом, в различных формах электрохирургический инструмент 10 использованием концевого зажима 3156 создает подающий контур и возвратный контур, где захваченная для обработки ткань входит в данную схему или замыкает ее. В некоторых формах генератор 3164 может представлять собой монополярный РЧ-блок ESU, а электрохирургический инструмент 10 может содержать монополярный концевой зажим, в который интегрированы один или более активных электродов. В такой системе для генератора 3164 может потребоваться обратная пластина, находящаяся в тесном контакте с пациентом в месте, удаленном от операционного поля, и/или другой подходящий возвратный контур. Обратная пластина может быть соединена с генератором 3164 посредством кабеля.
В процессе эксплуатации электрохирургического инструмента 150 врач по существу захватывает ткань, подает энергию на захваченную ткань для образования сплавления или уплотнения и затем приводит в движение режущий ткань элемент 3210 на дистальном конце перемещаемого по оси элемента 3182 через захваченную ткань. В соответствии с различными формами поступательное перемещение перемещаемого по оси элемента 3182 может проводиться в заданном темпе или иным образом контролироваться, чтобы движение перемещаемого по оси элемента 3182 проходило с подходящей скоростью. При контроле скорости движения повышается вероятность того, что захваченная ткань будет герметизирована надлежащим и функциональным образом перед ее рассечением режущим элементом 3210.
В некоторых формах рабочая часть 100 может содержать ультразвуковой концевой зажим, использующий гармоническую или ультразвуковую энергию для обработки ткани. ФИГ. 74 иллюстрируют одну из форм ультразвукового концевого зажима 3026 для применения с хирургическим инструментом 10. Блок концевого зажима 3026 содержит блок зажимного рычага 3064 и лезвие 3066 для образования браншей зажимного механизма. Лезвие 3066 может лезвием, приводимым в действие при помощи ультразвука, акустически соединенного с ультразвуковым преобразователем 3016, расположенным внутри концевого зажима 3026. Примеры преобразователей малых размеров и концевых зажимов, содержащих преобразователи, представлены в одновременно рассматриваемых заявке на патент США № 13/538601, озаглавленной «Ультразвуковые хирургические инструменты с дистально расположенными преобразователями» и опубликованной заявке на патент США № 2009/0036912. Преобразователь 3016 может акустически соединяться (т.е. прямо или косвенно соединяться механически) с лезвием 3066 с помощью волновода 3078.
Трубчатый приводной элемент 3058 может перемещать блок зажимного рычага 3064 в открытое положение в направлении 3062А, в котором блок зажимного рычага 3064 и лезвие 3066 расположены в пространственном отношении относительно друг друга в зажатом или закрытом положении в направлении 3062В, в котором блок зажимного рычага 3064 и нож 3066 взаимодействуют с целью захвата ткани, расположенной между ними. Дистальный конец трубчатого возвратно-поступательного приводного элемента 3058 механически соединен с концевым исполнительным элементом в сборе 3026. В проиллюстрированной форме дистальный конец трубчатого возвратно-поступательного трубчатого приводного элемента 3058 механически соединен узлом зажимного рычага 3064, который выполнен с возможностью поворота вокруг точки опоры 3070 для открытия и закрытия узла зажимного рычага 3064. Например, в показанной форме блок зажимного рычага 3064 выполнен с возможностью перемещения из открытого положения в закрытое положение в направлении 3062В вокруг точки поворота 3070, когда возвратно-поступательный трубчатый приводной элемент 3058 втягивается в проксимальном направлении. Блок зажимного рычага 3064 выполнен с возможностью перемещения из закрытого положения в открытое положение в направлении 3062А относительно точки поворота 3070, когда возвратно-поступательный трубчатый приводной элемент 3058 выдвигается в дистальном направлении. (ФИГ. 75)
Трубчатый приводной элемент 3058 может перемещаться проксимально и дистально в соответствии с вращением резьбового приводного стержня 3001. Проксимальный конец резьбового приводного стержня 3001 может быть сконструирован для подсоединения без возможности вращения к выходному гнезду 238 и таким образом получать вращательное движение, предоставленное двигателем 530. Трубчатый приводной элемент 3058 может содержать резьбовую глухую гайку 3059 для приема резьбового приводного стержня 3001, так что вращение резьбового приводного стержня 3001 заставляет трубчатый приводной элемент 3058 перемещаться дистально и проксимально. На ФИГ. 76-77 представлены дополнительные виды одной из форм перемещаемого по оси элемента концевого зажима 3058 и резьбовой глухой гайки 3059. В некоторых формах трубчатый приводной элемент 3058 образовывает полость 3003. Волновод 3078 и/или часть лезвия 3066 могут проходить через полость 3003, как показано на ФИГ. 74.
В одной примерной форме дистальный конец ультразвукового трансмиссионного волновода 3078 может быть соединен с проксимальным концом лезвия 3066 при помощи внутреннего соединения с резьбой, предпочтительно на или вблизи пучности. Предполагается, что нож 3066 может быть прикреплен к ультразвуковому трансмиссионному волноводу 3078 при помощи любых подходящих средств, таких как сварное соединение или т.п. Хотя лезвие 3066 может быть отсоединяемым от ультразвукового трансмиссионного волновода 3078, также предполагается, что одноэлементный концевой зажим (например, лезвие 3066) и ультразвуковой трансмиссионный волновод 3078 может быть выполнен в виде одного монолитного куска.
Ультразвуковой преобразователь 3016, известный как «усилитель Ланжевена», как правило осциллирует в ответ на электрический сигнал, полученный от генератора 3005 (ФИГ. 74). Например, преобразователь 3016 может содержать множество пьезоэлектрических элементов или других элементов для преобразования электрического сигнала от генератора 3005 в механическую энергию, что приводит первоначально к стоячей акустической волне продольного вибрирующего движения ультразвукового преобразователя 3016 и части лезвия 3066 узла концевого зажима 3026 на ультразвуковых частотах. Ультразвуковой преобразователь 3016 может, без необходимости, обладать длиной, равной целому числу половинной системной длины волн (nλ/2: где «n» является любым положительным целым числом, например n=1, 2, 3) в длину. Подходящим диапазоном вибрационной частоты для преобразователя 3016 и лезвия 3066 может быть приблизительно от 20 Гц до 32 кГц, и наиболее подходящим диапазоном вибрационной частоты может быть приблизительно 30-10 кГц. Пригодной операционной вибрационной частотой может быть приблизительно 55,5 кГц, например.
Генератор 3005 может быть генератором любого пригодного типа, расположенным внутри или снаружи хирургического инструмента 10. Пригодный генератор доступен в виде модели номер GEN11 от компании Ethicon Endo-Surgery, Inc., Cincinnati, Ohio. Когда преобразователь 3016 получает энергию, стоячая волна вибрационного движения генерируется через волновод 3078 и лезвие 3066. Концевой зажим 3026 разработан для работы при резонансе таким образом, что производится схема акустической стоячей волны предопределенной амплитуды. Амплитуда вибрационного движения на любой точке вдоль преобразователя 3016, волновода 3078 и лезвия 3066 зависит от расположения вдоль этих компонентов, в котором измеряется вибрационное движение. Минимальное или нулевое пересечение в стоячей волне вибрационного движения как правило называется узлом (т.е. где движение минимально), и локальный абсолютный количественный максимум или пик в стоячей волне как правило называют пучностью (т.е. где локальное движение является максимальным). Расстояние между пучностью и ее ближайшим узлом составляет одну четвертую длины волны (λ/4).
В одной примерной форме лезвие 3066 может иметь длину по существу равную целому множителю половины длин волн системы (nλ/2). Дистальный конец лезвия 3066 может быть расположен возле пучности с целью предоставления максимального продольного отклонению дистального конца. Когда блок преобразователя подключен к источнику питания, дистальный конец лезвия 3066 может быть сконструирован с возможностью продольно перемещаться в диапазоне, например, от приблизительно 10 до приблизительно 500 микрон двойной амплитуды, и предпочтительно в диапазоне от приблизительно 30 до 64 микрон при предварительно заданной частоте вибрации, равной, например, 55 кГц.
В одной примерной форме лезвие 3066 может быть подсоединено к ультразвуковому трансмиссионному волноводу 3078. Лезвие 3066 и ультразвуковой трансмиссионный волновод 3078, как проиллюстрировано, сформированы в виде конструкции единого узла из материала, пригодного для передачи ультразвуковой энергии. Примеры подобных материалов включают Ti6Al4V (сплав титана, содержащий алюминий и ванадий), алюминий, нержавеющая сталь или другие пригодные материалы. Альтернативно, лезвие 3066 может быть выполнено с возможностью отделения (и выполнено из другой композиции материалов) от ультразвукового трансмиссионного волновода 3078 и соединено, например, контактами, спайкой, клеем, быстрым соединением или иными пригодными известными методами. Длина ультразвукового трансмиссионного волновода 3078 может быть по существу равной целому числу половины длины волны (nλ/2), например. Ультразвуковой трансмиссионный волновод 3078 может быть изготовлен предпочтительно из стержня с твердой сердцевиной, сделанного из материала, пригодного для эффективной передачи ультразвуковой энергии, такого как, например, сплав титана, описанный выше (т.е., Ti6Al4V) или любого пригодного сплава алюминия или других сплавов.
В некоторых формах хирургический инструмент 10 может также использоваться с другими степлероподобными концевыми зажимами. Например, ФИГ. 78 иллюстрирует одну из форм концевого зажима линейных скоб 3500 для применения с хирургическим инструментом 10. Концевой зажим 3500 содержит часть упорного элемента 3502 и канал передачи скоб 3514. Канал передачи скоб 3514 способен поступательно перемещать скобы как в дистальном так и в проксимальном направлениях, как показано стрелкой 3516. Резьбовой приводной стержень 3506 может быть подсоединен к выходному гнезду 238, к примеру, как описано выше в настоящем документе для приема вращательного движения, предоставленного двигателем 530. Резьбовой приводной стержень 3506 может быть подсоединен к резьбовой глухой гайке 3508 фиксировано подсоединен к скобовому каналу 3514, так что вращение резьбового приводного стержня 3506 приводит к поступательному перемещению канала со скобками 3514 в направлениях, указанных стрелкой 3516. Глухая гайка 3508 может также соединяться с приводом 3510, который, в свою очередь, может контактировать с картриджем со скобками 3512. По мере перемещения в дистальном направлении привод 3510 может выталкивать скобы из картриджа со скобками 3512 к опоре 3502, таким образом продвигая скобы сквозь любую ткань, расположенную между каналом со скобками 3514 и опорой 3502.
Также, в некоторых формах, хирургический инструмент может использоваться с концевым зажимом для круглых скоб. ФИГ. 79 иллюстрирует одну из форм концевого зажима для круглых скоб 3520 для применения с хирургическим инструментом 10. Концевой зажим 3520 содержит опору 3522 и скобную часть 3524. Резьбовой приводной стержень 3530 проходит от опоры 3522 через скобную часть 3524. Резьбовой приводной стержень 3530 может быть подсоединен к выходному гнезду 238, к примеру, как описано выше в настоящем документе для приема вращательного движения, предоставленного двигателем 530. Резьбовая глухая гайка 3532 может быть соединена с частью скобной части 3524 таким образом, что вращение резьбового приводного стержня 3530 попеременно перемещает скобную часть 3524 дистально и проксимально, как указано стрелкой 3534. Резьбовой стержень также может быть соединен с приводом 3528 таким образом, что дистальное движение скобной части 3524 толкает привод 3528 дистально в картридж со скобками 3526 для выведения скоб из картриджа 3526 в любую ткань, расположенную между опорой 3522 и скобной частью 3524. В некоторых вариантах осуществления концевой зажим 3520 может также содержать нож или режущую рабочую часть 3535 для резания ткани перед наложением скоб.
В дополнение к различным концевым зажимам следует понимать, что прочие рабочие части могут быть взаимозаменяемыми в соответствии с хирургическим инструментом 10. Например, некоторые формы хирургического инструмента 10 используют различные силовые кабели. ФИГ. А иллюстрирует несколько примеров силовых кабелей 3540, 3542, 3544 для применения в хирургических инструментах; Каждый из силовых кабелей 3540, 3542, 3544 содержит гнездо 3546 для подсоединения к хирургическому инструменту 10. Силовые кабели 3540, 3542, 3544 могут применяться для подключения хирургического инструмента 10 к различным источникам питания. Например, силовые кабели 3540 и 3542 содержат гнезда 3550, 3552 для подключения к генераторам, таким как генератор модели номер GEN11 от компании Ethicon Endo-Surgery, Inc., in Cincinnati, Ohio. Такой генератор может предоставляться питание инструменту 10 и/или может проводить сигнал для перемещения электрохирургического и/или ультразвукового концевого зажима. Силовой кабель 3544 содержит штекер 3548, который может быть включен в стенную розетку для передачи питания инструменту 10 (например, вместо батарейки 802).
В некоторый формах хирургический инструмент может также содержать взаимозаменяемые рабочие части, в число которых входят различные стержни. ФИГ. 81 иллюстрирует несколько примеров стержней 3554, 3556, 3558 для применения в хирургическим инструментом 10. Каждый из стержней 3554, 3556, 3558 содержит часть съемного передаточного узла 700', 700'', 700''', аналогичную части съемного передаточного узла 700, которая может приниматься инструментом 10, как описано выше в настоящем документе. Каждый из стержней 3554, 3556, 3558 также содержит блок соединительной муфты 3557 для приема концевого зажима, аналогичный блоку соединительной муфты 200, описанному выше в настоящем документе. В некоторых вариантах осуществления различные стержни сконструированы для приема различных типов концевых зажимов на блоке соединительной муфты 3557. Каждый из стержней 3554, 3556, 3558 может обладать разными характеристиками включая, к примеру, различную длину, присутствие или отсутствие шарниров пассивные или активные шарниры, различные степени гибкости шарниров, различные диаметры, различную кривизну, и т.д. Например, стержень 3554 образует отклонение 3559 от центральной оси стержня. Стержень 3558 образует шарнирное соединение 3560, которое может сгибаться в манере, аналогичной описанной выше в настоящем документе относительно шарнирного соединение 310.
Становится очевидно, что различные виды рабочих частей 100 (например, силовые кабели, стержни, концевые зажимы, и т.д.) требуют различных двигателей и прочих компонентов хирургического инструмента 10 для работы различными путями. Например, электрические концевые зажимы, такие как электрохирургический концевой зажим 3156 и ультразвуковой концевой зажим 3026 требуют энергетического сигнала для передачи энергии электродам и/или ультразвуковым лезвиям. Различные концевые зажимы могут также требовать различных движений от различных двигателей 402, 560, 530, 610 для активации, включая, к примеру, активизацию различных двигателей, предусмотрение различных значений кручения, и т.д. В различных формах рабочие части 100 могут предоставлять хирургическому инструменту 10 контрольные параметры.
ФИГ. 82 является блочной диаграммой узла рукоятки 20 хирургического инструмента 10, демонстрирующей различные элементы контроля. Контрольные элементы, показанные на ФИГ. 82, сконструированы для приема контрольных параметров от различных рабочих частей и контроля хирургического инструмента 10, основанного на полученных контрольных параметрах и основанного на одном или нескольких входящих сигналах, полученных от клинициста (например, через контрольный рычажный переключатель 840 или иное пригодное активирующее приспособление). Контрольные элементы могут содержать контрольную схему 3702 для контроля хирургического инструмента 10. В различных формах контрольная схема 3702 может выполнять контрольный алгоритм для управления хирургическим инструментом 10, включая любые встроенные рабочие части. В некоторых формах контрольная схема 3702 выполнена на проксимальной монтажной плате 820, описанный выше в настоящем документе. Контрольная схема 3702 содержит микропроцессор 3706 и связанную с ним память и/или накопитель данных 3708. В некоторых формах контрольная схема 3702 может также содержать генераторную схему 3704 для передачи электрического сигнала на ультразвуковой и/или электрохирургический прибор. Генераторная схема 3704 может функционировать как отдельный компонент или в сочетании с внешним генератором.
ФИГ. 82 также демонстрирует двигатели 3714, который могут соответствовать двигателям 402, 560, 530, 610, описанным выше. Батарейка 3713 может соответствовать батарейке 802, описанной выше в настоящем документе. Ввод в контрольную схему 3702 может осуществляться контрольным рычажным переключателем 840 или иным пригодным активирующим устройством. Различные хирургические рабочие части 100, описанные в настоящем документе, могут подсоединяться к рукоятке 20 через соответствующие гнезда 3710, 3712. Гнездо 3712 может принимать стержень, такой как стержни 3554, 3556, 3558. Например, гнездо 3712 может принимать стержень способом, аналогичным способу, которым рукоятка 20 принимает съемный передаточный узел 700, как описано выше в настоящем документе. Гнездо 3710 может быть сконструировано для приема гнезда кабеля, такого как гнезда 3546, описанные выше в настоящем документе.
Контрольная схема 3702 в сочетании с различными иными контрольными элементами, такими как гнезда 3710, 3712 могут принимать контрольные параметры от различных встроенных рабочих частей. Контрольные параметры могут содержать, к примеру, данные, описывающие свойства рабочих частей, данные, описывающие алгоритмы работы инструмента 10 со встроенными рабочими частями, и т.д. Гнезда 3710, 3712 могут механическим и коммуникационно подсоединяться к различным рабочим частям. Например, различные рабочие части могу содержать схемы 3720 для хранения контрольных параметров. Подобные схем 3720 показаны в соединении с силовыми кабелями 3540, 3542, 3544 на ФИГ. 80 и в соединении со стержнями 3554, 3556, 3588 с ФИГ. 81. Также, ФИГ. 83 демонстрирует одну из форм различных инструментальных частей концевого зажима 3730, 3732, 3734, 3736, 3738, включающих схемы 3720 как описано в настоящем документе. Схемы 3720 могу содержать один или несколько компонентов накопителей данных для хранения контрольных параметров для обеспечения контрольной схемы 3702. Подобные компоненты накопителей данный могут включать любой пригодный тип запоминающего устройства (например, программируемое электрически стираемое устройство для считывания памяти (EEPROM), цифровой регистратор, любой другой тип запоминающего устройства, и т.д.). Запоминающие устройства также могут включать катушки или иные аппаратные компоненты, сконструированные для модуляции предварительно заданных контрольных параметров, к примеру, в ответ на радиочастотный идентификационный (РЧИД) запрашивающий сигнал. В некоторых формах схемы 3720 осуществляют прямое проводное подключение к контрольной схеме 3702, например, через соответствующие гнезда 3710, 3712. Соответственно, контрольная схема 3702 может напрямую связываться с различными схемами 3720 для получения контрольных параметров.
В некоторых формах схемы 3720 содержат пассивные или активные РЧИД устройства. Рукоятка 20 может содержать одну или несколько антенн 3716, 3718, которые могут быть расположены на поверхности или возле соответствующих гнезд 3710, 3712. Применяя антенны 3716, 3718 контрольная схема 3702 может запрашивать схемы 3720 на встроенных рабочих частях для получения контрольных параметров. В некоторых формах контрольная схема 3702 запрограммирована запрашивать различные рабочие части при включении и/или в момент определения установки и/или удаления рабочей части. В ответ контрольная схема 3702 может получать отраженный сигнал с РЧИД устройства. Отраженный сигнал может указывать релевантные контрольные параметры. В некоторых формах схемы 3720 могут содержать активные РЧИД устройства, которые передают данные, описывающие связанные с ними рабочие части, к примеру, при установке.
Как показано на ФИГ. 81 некоторые формы стержней могут содержать антенны 3719 на дистальных частях. Антенны 3719 могут быть связаны с контрольной схемой 3702 через проводники (не показаны), проходящие сквозь соответствующие стержни, позволяющие контрольной схеме 3702 запрашивать РЧИД устройства схем 3720 концевых зажимов, таких как концевые зажимы 3730, 3732, 3734, 3736, 3738. В некоторых формах антенны 3718, расположенные в рукоятке, могут получать и передавать достаточное количество энергии для запроса РЧИД устройства схемы 3720 на концевом зажиме без необходимости в отдельной антенне 379 в стержне. В некоторых конструкциях схемы 3720 могут сконструированы для проводного соединения с контрольной схемой 3702. Например, антенны 3716, 3718, 3719 могут быть удалены.
ФИГ. 84 является блочной диаграммой, демонстрирующей одну из форм контрольной конструкции 3800 для применения в контрольной схеме 3702 для контроля хирургического инструмента 10. Согласно конструкции 3800 контрольная схема 3702 программируется контрольным алгоритмом 3802. Контрольный алгоритм 3802 получает контрольные параметры от установленных рабочих частей в форме вводных переменных 3801. Вводные переменные 3801 могу описывать свойства установленных рабочих частей. Контрольный алгоритм 3802 также получает один или несколько контрольных сигналов 3818 (например, от контрольного рычажного переключателя 840, роботизированной системы или иного пригодного активирующего устройства, управляемого клиницистом). На основе вводных переменных 3801 контрольный алгоритм 3802 может управлять хирургическим инструментом 10 путем трансляции одного или нескольких вводных сигналов 3818 в выходной контрольный сигнал двигателя 3814 для управления двигателями 3714 и необязательный выходной энергетический контрольный сигнал 3816 для управления ультразвуковым и/или электрохирургическим концевым зажимом. Становится очевидно, что не все формы хирургического инструмента 10 нуждаются в получении вводных переменных от всех из перечисленных рабочих частей. Например, некоторые формы хирургического инструмента содержат один стержень и/или фиксированный концевой зажим. Также, некоторые формы хирургического инструмента (или его конструкции) могут не иметь силового кабеля.
Контрольный алгоритм 3802 может задействовать множество функциональных модулей 3804, 3806, 3810, 3812, связанных с различными аспектами хирургического инструмента 10. Пусковой модуль 3804 может транслировать один или несколько вводных контрольных сигналов 3818 в один или несколько выходных сигналов контроля двигателя 3814 для контроля соответствующих двигателей 3714 для пуска инструмента 10. Шарнирный модуль 3806 может транслировать один или несколько вводных контрольных сигналов 3818 в один или несколько выходных сигналов контроля двигателя 3814 для шарнирного движения стержня инструмента 10. Силовой модуль 3812 может направлять питание на различные компоненты хирургического инструмента 10 в соответствии с требованиями встроенного силового кабеля. Для форм инструмента 10, использующих энергию на концевом зажиме (например, ультразвуковые и/или электрохирургические инструменты), энергетический модуль 3810 может передавать один или несколько входных контрольных сигналов 3818 в выходные энергетические сигналы 3816 для передачи к концевому зажиму. Энергетические сигналы 3816 могут производиться генератором 3704 и/или внешним генератором (не показанным на ФИГ. 84) и могут передаваться на преобразователь 3016 и/или поверхности для подачи энергии 3204А, 3204В концевого зажима.
Различные модули 3804, 3806, 3810, 3812 контрольного алгоритма 3802 могут использовать контрольные параметры в форме вводных переменных 3801 для трансляции одного или нескольких вводных контрольных сигналов 3818 в выходные сигналы 3814, 3816. Например, вводные переменные 3801, полученные от различных рабочих частей могут повлиять на контрольный алгоритм 3802 различными путями. Вводные переменные 3801, полученные от силового кабеля, такого как 3540, 3542, 3544 могут включать, например, тип кабеля, подсоединен ли кабель к внешнему объекту, такому как генератор или силовая розетка, идентификацию внешнего объекта, к которому подключен кабель, и т.д. Один тип силового кабеля, такой как кабель 3544, может быть сконструирован для получения питания от внешнего силового гнезда, такого как стенная розетка. Когда контрольная схема 3702 определяет, что установлен кабель этого типа (например, в гнездо 3710), силовой модуль 3812 может быть запрограммирован для конфигурации контрольной схемы 3702 для питания двигателей 3714 и/или энергетические элементы от энергии, полученной через встроенный кабельный элемент. Энергия, полученная через установленную кабельную часть, может быть использована в дополнение или вместо питания, предоставленного батарейкой 3713.
Другой тип кабеля, такой как 3540 и 3542 может быть сконструирован для подключения к внешнему генератору. Силовой модуль 3812 и/или энергетический модуль 3810 могут конфигурировать контрольную схему 3702 для питания энергетического элемента на основании энергетического сигнала, полученного через установленный силовой кабель. Дополнительно, энергетический модуль 3810 может конфигурировать контрольную схему 3702 для обеспечения ввода в генератор через установленный силовой кабель. Подобный ввод может включать, например, входной контрольный сигнал 3818, указывающий на то, что клиницист затребовал энергию. В некоторых формах вводные переменные 3801, полученные от силового кабеля, могут также определять тип генератора, к которому подключен и/или сконструирован для подключения силовой кабель. Примеры генераторов могут включать отдельные электрохирургические генераторы, отдельные ультразвуковые генераторы, комбинированные электрохирургические/ультразвуковые генераторы, и т.д. В некоторый формах вводные переменные 3801, полученные от кабеля, могут также указывать на тип генератора, для соединения с которым сконструирован кабель. В некоторых формах указанный тип генератора может влиять на контрольный алгоритм 3802. Например, различные типы генераторов могу обладать различным управляющим интерфейсом и ожидать различных форм инструкций от хирургического инструмента 10 и/или предоставлять выходные данные в различных формах.
Когда стержень, такой как один из стержней 3554, 3556, 3558 является съемной рабочей частью, вводные переменные 3801, полученные от стержня могу определять разные свойства стержня. Подобные свойства могут включать, к примеру, длину стержня, расположение и степень изгиба стержня (при его наличии), параметры, описывающие шарнирное соединение стержня (при его наличии), и т.д. Длина стержня и расположение и степень изгиба стержня могут быть использованы, к примеру, пусковым модулем 3804 и/или шарнирным модулем 3806 контрольного алгоритма 3802 для задания требований и/или пределов кручения. Параметры, описывающие шарнирное соединение стержня, могут указывать или позволять шарнирному модулю 3806 получать различные движения двигателя, требующиеся для шарнирного сгибания стержня в различных направлениях. В некоторых вариантах осуществления вводные переменные 3801 могут также указывать на степень разрешенного шарнирного сгиба, что шарнирный модуль 3806 может транслировать в максимально позволительные движения двигателя. В некоторых формах вводные переменные 3801, полученные от стержня, могут также указывать, поддерживает ли стержень вращение стержня и/или вращение концевого зажима. Подобные переменные 3801 могут быть использованы контрольным алгоритмом 3802 для получения данных о том, какой двигатель или двигатели 3714 должны быть активированы для вращения стержня и/или концевого зажима, кручение и количество оборотов, указанных для каждого двигателя 3714 и т.д.
Вводные переменные 3801, полученные от концевого зажима и рабочих частей могут быть в разных формах в зависимости от типа используемого концевого зажима. Например, эндокатеры и другие степлерные концевые зажимы, такие как концевой зажим 102, описанный выше в настоящем документе, могут предоставлять различные переменные значения, указывающие на длину концевого зажима (например, 45 мм или 60 мм линии скоб), являются ли опора и удлиненный канал прямыми или изогнутыми, двигатель 3714, к которому подсоединен приводной стержень, такой как приводной стержень 180, и т.д. Такие вводные переменные 3801 могут использоваться пусковым модулем 3804 для трансляции вводных контрольных сигналов 3818, запрашивающих пуск инструмента 10, в выходные сигналы контроля двигателя 3814. Например, длина, кривизна, и т.д. концевого зажима может задавать активацию двигателя 3714, требуемое значение силы или кручения, количество оборотов двигателя, необходимых для запуска, и т.д. Аналогично, вводные переменные 3818, полученные от линейного или кругового степлерных концевых зажимов, таких как 3500 и 3520, могут быть использованы пусковым алгоритмом 3804 для задания активации двигателя 3714 для пуска, требуемое значение силы или кручения для предоставления в ответ на разные уровни вводного сигнала 3818, относящегося к запуску, количество оборотов двигателя, необходимое для пуска, и т.д.
Когда концевой зажим является энергетическим концевым зажимом, таким как электрохирургический концевой зажим 3156 или ультразвуковой концевой зажим 3026, полученные вводные переменные 3801 могут описывать информацию, относящуюся к закрывающему движению концевого зажима, так же как и информацию, описывающую энергетические элементы, в том числе, к примеру сроки подачи энергии в контекста пускового удара. Информация, описывающая закрывающее движение, может быть использована, например, пусковым модулем 3804 для определения того, какой двигатель или двигатели 3714 должны быть активированы для пуска и/или извлечения, кручения и количества оборотов, указанного для каждого двигателя 3714, и т.д. Информация, описывающая энергетические элементы, может быть использована, например, энергетическим модулем 3810 для создания выходного энергетического сигнала 3816. Например, энергетический модуль 3810 может задавать требуемый тип выходного энергетического сигнала 3816 (например, напряжение, ток и т.д.), может ли сигнал быть создан внутренним генератором 3704, есть ли какие-либо блокировки для применения с сигналом. Примерные блокировки могут предотвратить пусковое движение при отсутствии поступления энергии и/или могут предотвратить поступление энергии, если не происходит пусковое движение. В некоторых вариантах осуществления энергетический модуль 3810 может также получать сроки подачи выходного энергетического сигнала 3816 в контексте пускового удара инструмента. Например, относительно электрохирургического концевого зажима 3156 энергетический модуль 3810 может получить длительность временного промежутка, на протяжении которого поверхности подачи энергии 3204А, 3204В должны быть активированы перед выдвижением режущего ткани элемента 3210.
ФИГ. 85 представляет последовательную схему, демонстрирующую пример формы протекания процесса 3600 для применения контрольного алгоритма 3802 с контрольной схемой 3702. На 3602 контрольная схема 3702 может получить указание на присутствие рабочей части (например, силовой кабель, стержень, концевой зажим и т.д.). Указание может генерироваться автоматически при установке рабочей части. Например, в формах, где рабочая часть содержит активный РЧИД, указание на присутствие рабочей части может быть предоставлено активным РЧИД. Также, в некоторых вариантах осуществления, гнездо 3710, 3712, с помощью которого рабочая часть подключается к инструменту 10, может содержать переключатель, который указывает на присутствие рабочей части. На 3604 контрольная схема 3702 может запрашивать у рабочей части вводные переменные 3801. Когда рабочая часть содержит пассивное РЧИД устройство, запрос может содержать подсвечивание РЧИД устройства радиочастотным сигналом. Когда рабочая часть находится в кабельном соединении с контрольной схемой 3702, запрос может содержать отправление запроса к запоминающему устройству, связанному с рабочей частью.
На 3606 контрольная схема 3702 может получать вводные переменные 3801 от рабочей части. Вводные переменные 3801 могут быть получены любым пригодным способом. Например, когда рабочая часть содержит пассивное РЧИД устройство, вводные переменные 3801 могут быть получены путем демодуляции обратного сигнала от РЧИД устройства. Когда существует проводное соединение между рабочей частью и схемой 3702, вводные переменные 3801 могут быть получены напрямую с запоминающего устройства на рабочей части, и т.д. На 3608 контрольная схема 3702 может применить вводные переменные 3801 к контрольному алгоритму 3802, например, как описано выше в настоящем документе. Это может обладать конструирующим эффектом на уже существующий алгоритм 3802 для работы с инструментом 10 с любой установленной рабочей частью или частями.
ФИГ. 86 является блочной диаграммой, демонстрирующей другую форму контрольной конструкции 3900 для применения в контрольной схеме 3702 для контроля хирургического инструмента 10. В конструкции 3900 контрольные параметры, полученные от различных рабочих частей, содержат алгоритмы для контроля соответствующих рабочих частей. Контрольная схема 3702 задействует контрольный алгоритм оболочки 3902, включающий операционную систему 3904. Операционная система 3904 запрограммирована для запроса установленных рабочих частей для получения контрольных параметров, в форме рабочих алгоритмов 3906. Каждый рабочий алгоритм 3906 может описывать способ трансляции входящих контрольных сигналов 3908 в исходящие сигналы контроля двигателя 3910 и исходящих энергетических сигналов 3912. При получении рабочих алгоритмов 3906 операционная система 3904 может выполнять алгоритмы 3906 для работы инструментом 10.
В некоторых вариантах осуществления операционная система 3904 может также согласовывать различные алгоритмы 3906. Например, рабочий алгоритм 3906, полученный из энергетического концевого зажима, может принимать различные конфигурации в зависимости от того, находится ли инструмент в связи с внешним генератором, или использует внутренний генератор 3704. Соответственно, операционная система 3904 может конфигурировать рабочий алгоритм 3906 для энергетического концевого зажима в зависимости от того, был ли получен рабочий алгоритм 3906 от силового кабеля для подсоединения к внешнему генератору. Также, в некоторых формах, пределы и/или количество оборотов, необходимый для запуска концевого зажима, может зависеть от конструкции стержня. Соответственно, операционная система 3904 может быть сконфигурирована для модификации рабочего алгоритма 3906, полученного от концевого зажима, на основании соответствующего рабочего алгоритма 3906, полученного от стержня.
ФИГ. 87 представляет последовательную схему, демонстрирующую пример формы протекания процесса 3400 для работы контрольного алгоритма 3902, с применением контрольной схемы 3702. На 3402 контрольная схема 3702 может запускать операционную систему 3904. Операционная система 3904 может программировать контрольную схему 3702 для выполнения различных иных действий, описанных в настоящем документе, с учетом контрольной конструкции 3900. На 3404 контрольная схема 3702 может запрашивать одну или несколько рабочих частей, установленных на хирургическом инструменте 10, например, как описано в настоящем документе. На 3406 контрольная схема 3702 может получать рабочие алгоритмы 3906 как описано в настоящем документе. На 3408 контрольная схема 3702 может применять полученные алгоритмы 3906 для оперирования хирургическим инструментом. Применение полученных алгоритмов 3906 может включать, например, согласование алгоритмов 3906, как описано выше в настоящем документе.
ФИГ. 88 и 89 иллюстрируют одну из форм хирургического инструмента 4010, содержащую сенсорный модуль 4004, расположенный в концевом зажиме 4002. В некоторых формах хирургический инструмент 4010 может быть аналогичным хирургическому инструменту 10 и концевой зажим 4002 может быть аналогичным концевому зажиму 102, описанным выше. Сенсорный модуль 4004 может быть сконструирован для измерения одного или нескольких условий на концевом зажиме 4002. Например в одной конструкции сенсорный модуль 4004 может содержать модуль анализа толщины ткани, который определяет толщину ткани, зафиксированной в концевом зажиме 4002 между картриджем со скобками 130 и упорным элементом 190. Сенсорный модуль 4004 может быть сконструирован для генерации беспроводного сигнала, являющегося индикатором одного или нескольких измеренных условий на концевом зажиме 4002. В соответствии с одной из конструкций, показанной на ФИГ. 89, сенсорный модуль 4004 может быть размещен на дистальном конце концевого зажима 4002 так, что сенсорный модуль 4004 не препятствует прохождению скоб из картриджа 130 при наложении скоб. В различных формах сенсорный модуль 4004 может содержать датчик, радиомодуль и источник питания. См. ФИГ. 90. Датчик может располагаться в дистальном конце концевого зажима 4002 (как показано на ФИГ. 89), на электрическом шарнирном соединении 310 или любой другой пригодной части рабочей части 100.
В различных конструкциях датчик может содержать любой пригодный датчик для определения одного или нескольких условий для концевого зажима 4002. Например, и без ограничений, датчик, расположенный на дистальном конце концевого зажима 4002, может содержать датчик толщины ткани, такой как датчик эффекта Холла или герконовое реле, оптический датчик, магнитно-индуктивный датчик, датчик усилия, датчик давления, пьезорезистивный пленочный датчик, ультразвуковой датчик, датчик вихревого тока, датчик пульсовой оксиметрии, датчик температуры датчик, сконструированный для обнаружения электрических характеристик траектории ткани (таких как емкость или сопротивление) или любое сочетание вышеперечисленного. В качестве другого примера, и без ограничений, датчик, расположенный на электрическом шарнирном соединении 310 может содержать потенциометр, датчик емкости (потенциометр скольжения), пьезорезистивный пленочный датчик, датчик давления или любой другой пригодный тип датчиков. В некоторых конструкциях сенсорный модуль 4004 может содержать множество датчиков, расположенный в многочисленных местах в концевом зажиме 4002. Сенсорный модуль 4004 может также содержать один или несколько визуальных маркеров для предоставления визуальных указаний, таких как видеотрансляция текущего состояния на концевом зажиме 4002 пользователю.
Сенсорный модуль 4004 может содержать радиомодуль, сконструированный для генерации и передачи беспроводного сигнала, сообщающего об измеряемом условии на концевом зажиме 4002. См. ФИГ. 90. Радиомодуль может содержать антенну, сконструированную для передачи беспроводного сигнала на первой частоте. Мощность передачи сенсорного модуля 4004 может быть ограничена размером антенны и источника питания, способного разместиться в сенсорном модуле 4004. Размер концевого зажима 4002 может уменьшить доступное пространство для размещения антенны или источника питания, достаточно мощного для передачи сигнала от сенсорного модуля 4004 к отдаленному месту, например, такому как видеомонитор 4014. Из-за ограниченного размера антенны и низкой мощности, подаваемой источником питания на сенсорный модуль 4004, сенсорный модуль 4004 может производить сигнал малой мощности 4006, способный к передаче на малые расстояния. Например, в некоторых формах сенсорный модель 4004 может передавать сигнал от концевого зажима 4002 на ретрансляционную станцию 4008, расположенную проксимально от концевого зажима 4002. Например, ретрансляционная станция 4008 может размещаться на рукоятке 4020 инструмента 4010 в стержне 4030 (например, проксимальной части стержня 4030), и/или в имплантируемом устройстве, расположенной на или внутри пациента.
Ретрансляционная станция 4008 может быть сконструирована для получения сигнала малой мощности 4006 от сенсорного модуля 4004. Сигнал малой мощности 4006 ограничен размером антенны и источником питания, который может быть размещен в концевом зажиме 4002 как часть сенсорного модуля 4004. Ретрансляционная станция 4008 может быть сконструирована для получения сигнала малой мощности 4006 и ретранслировать полученный сигнал как сигнал высокой мощности 4012. Сигнал высокой мощности 4012 может транслирован в удаленную сеть или прибор, такой как видео монитор 4014, сконструированный для демонстрации графической репрезентации измеряемого условия на концевом зажиме 4002. Хотя сенсорный модуль 4004 и ретрансляционная станция 4008 уже в целом описывались в связи с хирургическим инструментом 4010, специалисты в данной области науки поймут, что конструкция сенсорного модуля 4004 и ретрансляционной станции 4008 может применяться с любой пригодной хирургической системой, так как, например, роботизированная хирургическая система. К примеру, ретрансляционная станция 4008 может располагаться в стержней и/или инструментальной части роботизированного хирургического инструмента. Подходящая роботизированная хирургическая система описана в заявке на патент США № 13/538700, озаглавленной «Хирургические инструменты с шарнирными стержнями», включенной в настоящий документ во всей полноте путем ссылки.
В некоторых формах видео монитор 4014 может содержать отдельный блок для демонстрации измеренного условия на концевом зажиме 4002, стандартный монитор для просмотра для применения в эндоскопической, лапароскопической или открытой хирургии, или любой другой пригодный монитор. Графическая репрезентация на дисплее может быть представлена поверх видеопотока или другой информации, представленной на видео мониторе. В некоторых формах сигнал высокой мощности 4012 может прерывать демонстрацию данных на видео мониторе 4014 и может заставить видео монитор демонстрировать только графическую репрезентацию измеренного условия на концевом зажиме 4002. Приемный модуль 4015 может взаимодействовать с видео монитором 4014 с целью разрешения видео монитору 4014 получать сигнал высокой мощности 4012 от ретрансляционной станции 4008. В некоторых конструкциях приемный модуль 4015 может быть сформирован внутри видео монитора 4014. Сигнал высокой мощности 4012 может быть передан беспроводным методом, через кабельное соединение, или обоими способами. Сигнал высокой мощности 4012 может быть получен сетью широкого охвата (WAN), локальной сети (LAN) или любой другой пригодной сетью или прибором.
В некоторых формах видео монитор 4014 может демонстрировать изображения, основанные на данных, содержащихся в полученном сигнале высокой мощности 4012. Например, хирург может в реальном времени видеть данные, характеризующие толщину зафиксированной ткани, в течение всей процедуры, связанной с использованием устройства 4010. Видео монитор 4014 может включать монитор, например, ЭЛТ-монитор, плазменный монитор, ЖК-монитор или любой другой соответствующий монитор для визуального отображения. Видео монитор 4014 может демонстрировать графическую репрезентацию условия на концевом зажиме 4002, основанную на данных, содержащихся в полученном сигнале высокой мощности 4012. Видео монитор 4014 может демонстрировать условие на концевом зажиме 4002 в любом пригодном видел, таком как например, размещение графической репрезентации условия на концевом зажиме поверх видеопотока или других данных, представленных на видео мониторе 4014. В некоторых формах видео монитор 4014 может быть сконструирован для демонстрации исключительно данных, полученных из сигнала высокой мощности 4012. Аналогично сигнал высокой мощности 4012 может быть получен компьютерной системой (не показана). Компьютерная система могут содержать радиочастотный модуль (такой как, например, приемный модуль 4015) для связи с ретрансляционной станцией 4008. Компьютерная система может сохранять данные, полученные от блока памяти 4012 (например, в ПЗУ или на жестком диске), и может обрабатывать данные с помощью процессора.
В некоторый формах ретрансляционная станция 4008 усиливает мощность сигнала малой мощности 4006 в сигнал высокой мощности 4012, но никаким иным образом не изменяет сигнал малой мощности 4006. Ретрансляционная станция 4008 может быть сконструирована для передачи сигнала высокой мощности 4012 на удаленную сеть или устройство. В некоторых конструкциях ретрансляционная станция 4008 может изменять или обрабатывать полученный сигнал малой мощности 4006 перед ретрансляцией сигнала высокой мощности 4012. Ретрансляционная станция 4008 может быть сконструирована для преобразования полученного сигнала из первой частоты, переданной сенсорным модулем 4004, во вторую частоту, которую способны принимать удаленная сеть или прибор, такой как видео монитор 4014. Например, в одной конструкции сенсорный модуль 4004 может передавать сигнал малой мощности 4006, используя первую частоту, содержащую частоту, обеспечивающую прохождение радиосигнала через ткани человека. Частота, обеспечивающая прохождение радиосигнала через ткани человека, может включать частоту, позволяющую прохождение сигнала через ткани человека с минимальным ослаблением сигнала. Например, частота может быть выбрана снаружи полосы поглощения воды для ограничения ослабления сигнала человеческой тканью (которая может содержать высокий процент воды). Например, сенсорный модуль 4004 может применять полосу частот, выделенную для обслуживания медицинских имплантатов (MICS) (402-405МГц), пригодные индустриальные, научные и медицинские (ISM) радио полосы (такие как 433 МГц центральная частота или 915 МГц центральная частота), коммуникационную частоту ближнего поля (13,56 МГц), полосу блютуз коммуникации (2,4 ГГц), ультразвуковую частоту или любую другую пригодную частоту, способную проникать через человеческую ткань или полосу частот. Ретрансляционная станция 4008 может получать сигнал малой мощности 4006 на первой частоте. Ретрансляционная станция 4008 может преобразовывать сигнал малой мощности 4006 от первой частоты ко второй частоте, что пригодно для передачи по воздуху на большие расстояния. Ретрансляционная станция 4008 может использовать любую пригодную частоту для передачи сигнала высокой мощности 4012, такую как, например, вай-фай частоту (2,4 ГГц или 5 ГГц).
В некоторых формах ретрансляционная станция 4008 может преобразовывать полученный сигнал малой мощности 4006 из первого коммуникационного протокола во второй коммуникационный протокол перед передачей сигнала высокой мощности 4012. Например, сенсорный модуль 4004 может передавать сигнал малой мощности 4006, используя первый коммуникационный протокол, такой как, например, протокол коммуникации ближнего поля (NFC), коммуникационный протокол блютуза, патентованный коммуникационный протокол или любой другой пригодный коммуникационный протокол. Ретрансляционная станция 4008 может получать сигнал малой мощности 4006, применяя первый коммуникационный протокол. Ретрансляционная станция 4008 может содержать модуль преобразования протокола для преобразования полученного сигнала из первого коммуникационного протокола во второй коммуникационный протокол, такой как, например, TCP/IP, UDP, или любой другой пригодный коммуникационный протокол.
ФИГ. 90 является блочной диаграммой, показывающей сенсорный модуль 4104, который представляет собой пример конструкции сенсорного модуля 4004, описанного выше в настоящем документе. Сенсорный модуль 4104 может включать датчик 4116, контроллер 4118, радиомодуль 4124 и источник энергии 4126. Контроллер 4118 может иметь процессорное устройство 4120 и запоминающее устройство 4122. Датчик 4116 может располагаться в дистальном конце концевого зажима 4002 (как показано на ФИГ. 89), на шарнирном соединении 310 или любой другой пригодной части рабочей части 100. В различных формах датчик 4116 может содержать любой пригодный датчик для определения одного или нескольких условий для концевого зажима.
В некоторых конструкциях датчик 4116 может содержать датчик толщины ткани, такой как, например, датчик эффекта Холла. Датчик толщины ткани может определять толщину ткани, зафиксированной в концевом зажиме 4002 на основе величины магнитного поля магнита 4042, расположенного, например, на дистальном конце упорного элемента 190. См. ФИГ. 89. Когда хирург закрывает блок упорной пластину 190, магнит 4042 поворачивается вниз и приближается к датчику 4004, изменяя определяемое датчиком 4004 магнитное поле при вращении узла упорного элемента 190 в закрытое (фиксированное) положение. Определяемая датчиком 4004 сила магнитного поля магнита 4042 характеризует расстояние между желобом 130 и узлом упорного элемента 190, которое в свою очередь характеризует толщину ткани, зафиксированной между желобом 130 и узлом упорного элемента 190, когда концевой зажим 4002 находится в закрытом (фиксированном) положении.
Сенсорный модуль 4104 может быть сконструирован для генерации беспроводного сигнала, являющегося индикатором измеренного условия на концевом зажиме. Беспроводной сигнал может генерироваться радиомодулем 4124. В некоторых формах мощность передачи радиомодуля 4124 ограничена размером антенны, входящей в радиомодуль 4124 и размером источника питания 4126, расположенного в сенсорном модуле 4104. Размер концевого зажима 4002 может уменьшить доступное пространство для размещения антенны или источника питания 4126, достаточно мощного для передачи сигнала от датчика 4116 к отдаленному месту, например, такому как видеомонитор 4014. Из-за ограничений антенны и низкой мощности, предоставляемой источником питания 4126, радиомодуль 4124 могут производить только сигнал малой мощности 4006, способный передаваться на короткие дистанции, такие как дистанция до проксимального конца стержня 4030. Например, в одной форме радиомодуль 4124 может передавать сигнал малой мощности 4006 от концевого зажима 4002 к рукоятке 4020 хирургического инструмента 4010. В некоторых конструкциях источник питания 4126, способный подавать более высокий уровень мощности, может генерировать сигнал малой мощности 4006 для продления оперирования хирургическим инструментом 4010.
Устройство памяти 4122 контроллера 4118 может включать один или несколько твердотельных накопителей постоянного запоминающего устройства (ПЗУ) и (или) оперативного запоминающего устройства (ОЗУ). В различных конструкциях процессор 4120 и устройство (-а) памяти 4122 могут быть интегрированы в одну интегральную схему (ИС) или могут находиться в разных ИС. Устройство ПЗУ может представлять собой флеш-память. В устройстве (-ах) ПЗУ может храниться код с инструкциями для выполнения процессором 4120 контроллера 4118. Кроме того, в устройстве(-ах) ПЗУ 4122 могут храниться данные, характеризующие тип картриджа 130. Например, в устройстве(-ах) ПЗУ 4122 могут храниться данные с указанием типа модели картриджа со скобками 130. В некоторых конструкциях контроллер в рукоятке 4020 хирургического инструмента 4010 может использовать информацию об условиях и тип модели картриджа со скобками 130 для определения верной операции хирургического инструмента 4010. Например, сенсорный модуль 4004 может быть сконструирован для измерения толщины ткани. Информация о толщине ткани и типе модели картриджа могут применяться для определения, является ли ткань, зажатая в концевом зажиме 4002 слишком толстой или тонкой, на основании специализированного диапазона толщины ткани для конкретного картриджа со скобками 130. Радиомодуль 4124 может представлять собой маломощный радиомодуль для двухстороннего обмена данными по беспроводному каналу с использованием протокола беспроводной передачи данных с расположенным в рукоятке 4020 инструмента 4010 ретрансляционной станцией 4008. Радиомодуль 4124 может включать любую пригодную антенну для передачи сигнала малой мощности 4006. Например, радиомодуль 4124 может включать дипольную антенну, полуволновую дипольную антенну, монопольную антенну, антенну коммуникаций ближнего поля или любую другую пригодную антенну для передачи сигнала малой мощности 4006. Размер антенны и, таким образом, доступная мощность передачи и частоты, может быть ограничен размером концевого зажима 4002.
Согласно различным формам, радиомодуль 4124 может связываться с ретрансляционной станцией 4008, используя частоту, проникающую сквозь человеческую ткань. Например, для коммуникации между радиомодулем 4124 и ретрансляционной станцией 4008 могут применяться полосы частот, выделенную для обслуживания медицинских имплантатов (MICS) (402-405МГц), пригодные индустриальные, научные и медицинские (ISM) радио полосы (такие как 433 МГц центральная частота или 915 МГц центральная частота), коммуникационную частоту ближнего поля (13,56 МГц), полосу блютуз коммуникации (2,4 ГГц), ультразвуковую частоту или любую другую пригодную частоту, способную проникать через человеческую ткань или полосу частот. Источник энергии 4126 может представлять собой соответствующую батарею для подачи энергии на компоненты сенсорного модуля 4004, например, литий-ионную батарею или другую соответствующую батарею.
В некоторых формах компоненты сенсорного модуля 4104 могут располагаться на концевом зажиме 4002, на стержне 4030 или в любом другом пригодном месте на хирургическом инструменте 4010. Например, датчик 4116 может располагаться в дистальном конце концевого зажима 4002. Контроллер 4118, радиомодуль 4124 и источник питания 4126 могут располагаться на стержне 4030. Один или несколько проводов могут подключать датчик 4116 к контроллеру 4118, радиомодулю 4124 и источнику питания 4126. В некоторых формах функции концевого зажима 4002 и стержня 4030 могут ограничивать размещение сенсорного модуля 4104. Например, в иллюстрированной форме концевой зажим 4002 может сгибаться и вращаться благодаря электрическому шарнирному соединению 310. Размещение проводов поверх электрического шарнирного соединения 310 может привести к изгибу или смятию проводов и может помешать работе электрического шарнирного соединения 310. Размещение компонентов сенсорного модуля 4004 может быть ограничено до места, дистального от электрического шарнирного соединения 310 для предупреждения затруднений в работе шарнирного соединения 310 или сенсорного модуля 4004.
В некоторых конструкциях сенсорный модуль 4104 может содержать аналогово-цифровой преобразователь (АЦП) 4123. Датчик 4116 может генерировать аналоговый сигнал, сообщающего об условии на концевом зажиме 4002. Беспроводная передача сигнала, сообщающего об условии на концевом зажиме 4002, может требовать преобразования аналогового сигнала в цифровой сигнал. Аналоговый сигнал, произведенный датчиком 4116, может быть преобразован в цифровой сигнал с помощью АЦП 4123 перед генерацией и передачей сигнала малой мощности 4006. АЦП 4123 может быть включено в контроллер 4118 или может содержать отдельный контроллер, такой как, например, микропроцессор, программируемая вентильная матрица или любая другая пригодная АЦП схема.
ФИГ. 91 является блочной диаграммой, показывающей ретрансляционную станцию 4208, который представляет собой один из примеров конструкции ретрансляционной станции 4008, описанной выше в настоящем документе. Ретрансляционная станция 4208 может располагаться проксимально относительно стержня, например, рядом с батареей 4226 и отделенной от сенсорного модуля 4004 в концевом зажиме 4002 с помощью, например, стержня 4030. Например, ретрансляционная станция 4208 может располагаться в рукоятке 4020 хирургического инструмента 4010. Таким образом ретрансляционная станция 4208 может получать беспроводной сигнал от сенсорного модуля 4004. Ретрансляционная станция 4208 может содержать разъемный модуль, который может избирательно взаимодействовать с рукояткой 4020 хирургического инструмента 4002.
Как показано на ФИГ. 91, ретрансляционная станция 4208 может содержать радиомодуль 4228 и усиливающий модуль 4230. В некоторых конструкциях радиомодуль 4228 сконструирован для приема сигнала малой мощности 4006. Сигнал малой мощности 4006 может передаваться с сенсорного модуля 4004 и является индикатором состояния на концевом зажиме 4002. Радиомодуль 4228 ретрансляционной станции 4208 получает сигнал малой мощности 4006 и передает сигнал малой мощности 4006 на усиливающий модуль 4230. Усиливающий модуль 4230 может усиливать сигнал малой мощности 4006 до сигнала высокой мощности 4012, пригодного для передачи на большие расстояния, чем сигнал малой мощности 4006. После усиления полученного сигнала малой мощности 4006 до сигнала высокой мощности 4012, усиливающий модуль 4230 может передать сигнал высокой мощности 4012 на радиомодуль 4228 для передачи на удаленную суть или прибор, такой как, например, видео монитор 4014. Усиливающий модуль 4230 может содержать любую пригодную усиливающую схему, например, транзистор, операционный усилитель, полный дифференционный усилитель, или любой другой пригодный усилитель сигнала.
ФИГ. 92 является блочной диаграммой, показывающей ретрансляционную станцию 4308, которая представляет собой другой пример конструкции ретрансляционной станции 4008, описанной выше в настоящем документе. В иллюстрированной форме ретрансляционная станция 4308 содержит радиомодуль 4328, усиливающий модуль 4330 и модуль обработки 4336. Усиливающий модуль 4330 может усиливать полученный сигнал малой мощности 4006 перед обработкой модулем обработки 4336, после того, как модуль обработки 4336 обработал полученный сигнал малой мощности 4006 или и до и после обработки модулем обработки 4336. Радиомодуль 4328 может содержать приемный модуль 4332 и передающий модуль 4334. В некоторых формах приемный модуль 4332 и передающий модуль 4334 могут быть скомбинированы в модуль, приемопередающий сигнал (не показан). Приемный модуль 4332 может быть сконструирован для получения сигнала малой мощности 4006 от сенсорного модуля 4004. Приемный модуль 4332 может передавать полученный сигнал малой мощности 4006 на модуль обработки 4336.
В иллюстрированной конструкции модуль обработки 4336 содержит модуль преобразования частот 4338 и модуль преобразования протокола 4340. Модуль преобразования частоты 4338 может быть сконструирован для преобразования полученного сигнала малой мощности 4006 из первой частоты во вторую частоту. Например, сенсорный модуль 4004 может передавать сигнал малой мощности 4006, используя первую частоту, которая пригодна для передачи через ткань человека, такую как частота MICS или ISM. Приемный модуль 4332 может получать сигнал малой мощности 4006 на первой частоте. Модуль преобразования частоты 4338 может преобразовывать сигнал малой мощности 4006 от первой частоты ко второй частоте, которая пригодна для передачи по воздуху на большие расстояния. Модуль преобразования частоты 4338 может преобразовывать полученный сигнал малой мощности 4006 в любую пригодную частоту для передачи сигнала высокой мощности, такую как, например, частота вай-фай (частоты 2,4 ГГц или 5 ГГц).
Модуль преобразования протокола 4340 может быть сконструирован для преобразования полученного сигнала из первого коммуникационного протокола во второй коммуникационный протокол. Например, сенсорный модуль 4004 может передавать сигнал малой мощности 4006, используя первый коммуникационный протокол, такой как, например, протокол коммуникации ближнего поля (NFC), коммуникационный протокол блютуза, патентованный коммуникационный протокол или любой другой пригодный коммуникационный протокол. Ретрансляционная станция 4308 может получать сигнал малой мощности 4006, применяя первый коммуникационный протокол. Ретрансляционная станция 4308 может содержать модуль преобразования 4340 протокола для преобразования полученного сигнала 4006 из первого коммуникационного протокола во второй коммуникационный протокол, такой как, например, TCP/IP протокол, протокол блютуза, или любой другой пригодный коммуникационный протокол. Модуль обработки 4336, включая модуль преобразования частоты 4338 и модуль преобразования протокола 4340, может содержать один или несколько микропроцессоров, программируемых вентильных матриц, встроенных схем или любой другой контроллер или комбинацию вышеперечисленного.
В некоторых формах модуль преобразования частоты 4338 и/или модуль преобразования протокола 4340 могут быть программируемыми. Сети, видео мониторы или другое приемное оборудование могут быть сконструированы для приема сигналов на указанной частоте и в указанном протоколе. Например, местная сеть (LAN) может быть сконструирована для приема беспроводного сигнала, использующего беспроводной стандарт 802,11, требующего передачи на частоте 2,4 ГГц или 5 ГГц и использующего коммуникационный протокол TCP/IP. Пользователь может выбрать стандарт беспроводной коммуникации 802,11 из множества коммуникационных стандартов, сохраненных ретрансляционной станцией 4308. Модуль памяти может быть включен в ретрансляционную станцию 4308 для хранения множества коммуникационных стандартов. Пользователь может выбраться коммуникационный стандарт для сигнала высокой мощности 4012 из множества коммуникационных стандартов, хранящихся в модуле памяти. Например, пользователь может выбрать коммуникационный стандарт 802,11 в качестве коммуникационного стандарта для передачи сигнала высокой мощности 4012. Когда коммуникационный стандарт выбран пользователем, модуль преобразования частоты 4338 или модуль преобразования протокола 4340 могут быть запрограммированы модулем памяти на преобразование полученного сигнала малой мощности 4006 в выбранный коммуникационный стандарт путем преобразования частоты или коммуникационного протокола полученного сигнала малой мощности 4006. В некоторых конструкциях ретрансляционная станция 4308 может автоматически обнаруживать верную частоту и коммуникационный протокол для получения сигнала малой мощности 4006 или ретрансляции сигнала высокой мощности 4012. Например, ретрансляционная станция 4308 может обнаружить больничную беспроводную коммуникационную сеть. Ретрансляционная станция 4308 может автоматически программировать модуль преобразования частоты 4338 и модуль преобразования протокола 4340 для преобразования полученного сигнала малой мощности 4006 в нужную частоту и протокол для передачи сигнала высокой мощности 4012 в больничную беспроводную коммуникационную сеть.
В иллюстрированной форме модуль обработки 4336 может передавать обработанный сигнал на усиливающий модуль 4330 для усиления обработанного сигнала в сигнал высокой мощности 4012 перед передачей. Усиливающий модуль 4330 может усилить обработанный сигнал до уровня, пригодного для передачи передающим модулем 4334. Усиливающий модуль 4330 может содержать любую пригодную усиливающую схему, например, транзистор, операционный усилитель, полный дифференционный усилитель, или любой другой пригодный электронный усилитель. Усиливающий модуль 4330 может содержать аккумулятор (не показан) или может быть подключен к источнику питания 4326, расположенному внутри рукоятки 4020 хирургического инструмента 4010. Усиливающий модуль 4330 может быть программируемым для предоставления одного или нескольких уровней усиления в ответ на выбор соответствующего типа коммуникации.
Усиливающий модуль 4330 может передавать сигнал высокой мощности 4012 на передающий модуль 4334 для передачи. Хотя радиомодуль 4328, модуль обработки 4336 и усиливающий модуль 4330 показаны как отдельные модули, специалисты в данной области науки поймут, что любой или все проиллюстрированные модули могут быть скомбинированы в сигнальную встроенную схему или множество встроенных схем.
ФИГ. 93 иллюстрирует один из вариантов осуществления ретрансляции сигнала, указывающего на состояние на концевом зажиме 4400. Метод 4400 может содержать генерирование 4402 сенсорным модулем (например, сенсорным модулем 4004, описанным в настоящем документе), сигнал, указывающий на состояние на концевом зажиме, таком как концевой зажим 4002. Сигнал может представлять любое измеряемое состояние на концевом зажиме 4002, такое как, например, толщина ткани, зафиксированной в концевом зажиме 4002. Сенсорный модуль может генерировать сигнал, используя датчик, такой как, например, датчик 4116 сенсорного модуля 4104, показанный на ФИГ. 90. Метод 4400 может также содержать, передавая 4404 с помощью радиомодуля генерированный сигнал как сигнал малой мощности. Например, радиомодуль 4124, показанный на ФИГ. 90, может передавать сигнал малой мощности 4006. На практике, мощность передачи радиомодуля может быть ограничена размером антенны и источника питания, которые могут разместиться в концевом зажиме 4002. С учетом ограниченного пространства, мощность передачи радиомодуля может быть ограничена сигналом малой мощности 4006. Сигнал малой мощности 4006 может передаваться с помощью радиомодуля на уровне мощности, который позволяет сигналу малой мощности 4006 быть принятым ретрансляционной станцией 4008 в рукоятке 4020 хирургического инструмента 4010.
Метод ретрансляции сигнала, указывающего на состояния на концевом зажиме 4400, может также содержать прием 4406 сигнала малой мощности ретрансляционной станции, такой как, например, ретрансляционная станция 4008. После получения сигнала малой мощности, ретрансляционная станция может преобразовать 4408 сигнал малой мощности в сигнал высокой мощности, такой как, например, сигнал высокой мощности 4012. Преобразование сигнала малой мощности в сигнал высокой мощности может содержать усиление сигнала малой мощности усиливающим модулем, таким как усиливающий модуль 4230, показанный на ФИГ. 91. Преобразование сигнала малой мощности в сигнал высокой мощности может также содержать преобразование коммуникационного стандарта сигнала малой мощности в коммуникационный стандарт, пригодный для передачи сигнала высокой мощности. Например, метод 4400 может включать преобразование 4408, с применением модуля обработки, полученного сигнала малой мощности из первой частоты во вторую частоту.
После преобразования 4408 сигнала малой мощности в сигнал высокой мощности, метод 4400 может также содержать передачу 4410 ретрансляционной станцией сигнала высокой мощности в удаленное место, такое как, например, смотровой экран операционной комнаты или больничная сеть. Сигнал высокой мощности может быть принят 4412 смотровым экраном, на котором пользователю может демонстрироваться графическая репрезентация состояния на концевом зажиме. В некоторых конструкциях метод может содержать, в зависимости от выбора пользователя, частоту и/или коммуникационный протокол для сигнала высокой мощности до преобразования сигнала малой мощности. Частота и коммуникационный протокол могут быть выбраны из множества частот, хранящихся в модуле памяти ретрансляционной станции.
Электромеханический мягкий упор
В различных формах хирургический инструмент может использовать механический упор, приспособленный для остановки или замедления элемента, управляемого двигателем при окончании приводного удара или после него. Согласно различным формам, механический упор может содержать жесткий упор, предназначенный для резкого прекращения движения элемента, управляемого двигателем, и/или мягкий упор, предназначенный для замедления элемента, управляемого двигателем при окончании удара или после него. Как более подробно описано ниже, в некоторых формах такие инструменты могут включать электромеханический упор, содержащий механический упор и контрольную систему, сконструированную для измерения и/или отслеживания тока, поступающего на двигатель, использованный для приведения в движение элемента. В одной форме контрольная система сконструирована для прекращения подачи питания на двигатель или иным способом прекращать движение элемента, управляемого двигателем, при определении появления тока, соответствующего предварительно заданным параметрам.
Следует знать, что для краткости и простоты понимания различные аспекты механических и электромеханических упоров, описанные в настоящем документе, в целом описаны в соответствии с хирургическими инструментами и связанным с ними движущими элементами, в том числе режущие и сшивающие устройства. Однако, специалисты в данной области науки поймут, что настоящее раскрытие не настолько ограничено, и что различные механические упоры и относящиеся к ним электромеханические характеристики, раскрытые в настоящем документе, могут найти применение в других разнообразных приборах, известных в данной области науки. Например, в то время как дополнительные методы применения будут более понятны ниже, различные механические упоры, раскрытые в настоящем документе, могут использоваться в любом приборе, содержащем электрически контролируемый двигатель и/или контроль приводной системы, например, так же как и не-эндоскопические хирургические инструменты, такие как лапароскопические инструменты. Снова обратимся к ФИГ. 1-6, которые иллюстрируют электромеханический хирургический инструмент 10, оборудованный одной из форм механического упора, согласно одному из аспектов. Блок рукоятки 20 функционально соединен с узлом удлиненного стержня 30, дистальная часть которого функционально подсоединена к концевому зажиму 102. Концевой зажим 102 имеет проксимальный конец 103 и дистальный конец 104. Как описано выше, удлиненный желоб 110 может быть сконструирован для функциональной и съемной поддержки картриджа со скобками 130, и опорный блок 190 может быть избирательно подвижным относительно картриджа со скобками 130 между открытой позицией (см. ФИГ. 4) и открытой позицией (см. ФИГ. 6) для захвата ткани.
В некоторых формах инструмент 10 содержит приводной элемент, который может являться любой частью или компонентом инструмента 10, которая приводится в движение действием двигателя. В различных формах приводной элемент может включать блок удлиненного стержня 30, концевой зажим 102 или одну или несколько частей или компонентов, таких как салазки 170 или режущий ткань элемент 160, часть корпуса 162, которая может быть установлена за счет резьба на движущий винт концевого зажима 180, который установлен с возможностью вращения внутри удлиненного желоба 110. Как описывалось выше, салазки 170 удерживаются для осевого перемещения относительно движущего винта 180 и могут быть сконструированы для взаимодействия с корпусной частью 162 режущей ткани детали 160. Движущий винт концевого зажима 180 может поддерживаться с возможностью вращения внутри удлиненного желоба 110, как описано выше. Вращение движущего винта концевого зажима 180 в первом направлении заставляет режущую ткани деталь 160 перемещаться в дистальном направлении с помощью приводного удара. По мере того как режущая ткани деталь 160 перемещается дистально с помощью приводного удара, салазки 170 перемещаются дистально с помощью режущей ткани детали 160. В различных формах картридж со скобками 130 может быть дополнен механическим упором, содержащим мягкий упор. Согласно одному аспекту мягкий упор содержит один или несколько амортизаторов 174 для амортизации салазок 170, когда они достигают наиболее дистального положения внутри удлиненного желоба 110. Каждый из амортизаторов 174 может быть связан с элементом сопротивления 175, таким как пружина 176 для обеспечения амортизатора желательной степенью смягчения.
Как более подробно описано выше, салазки 170 и режущий ткань элемент 160 способны перемещаться во время приводного удара вдоль оси стержня А-А, проходя между проксимальным концом 103 концевого зажима 102 и дистальным концом 104 концевого зажима 102 для одновременного разрезания и сшивания ткани. В то время как проиллюстрированный концевой зажим 102 выполнен с возможностью работы в качестве эндокатера для зажатия, рассечения и сшивания ткани, в других аспектах можно применять другие типы концевых зажимов, такие как концевые зажимы для других типов хирургических устройств, таких как зажимы, рассекатели, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, ультразвуковые, РЧ или лазерные устройства и т.д.
Как видно на ФИГ. 94, который иллюстрирует дистальный конец 104 концевого зажима 102, показанного на ФИГ. 1-6, приводной элемент 158, содержащий салазки 170 и режущий элемент 160, способен перемещаться во время приводного такта, заданного вдоль оси стержня А-А между проксимальной исходной позицией и дистальной позицией конца такта. В одном аспекте в конце такта позиция определяется между первой и второй позицией S1, S2 (см. ФИГ. 97 и 78). В различных формах по меньшей мере одна из исходных позиций и конец такта включают механический упор, такой как жесткий упор или мягкий упор, которые могут физически препятствовать, например, блокировать или ограничивать дополнительное продольное перемещение соответствующую остановочную позицию. В одной форме и исходная позиция, и конец такта содержат механический упор. Как показано на иллюстрации, приводной элемент 158 расположен дистально перед или сразу после конца такта.
Как описывалось выше, хирургический инструмент 10 может использовать контрольную систему для контроля одного или нескольких двигателей и относящихся к ним приводных компонентов, как описано выше. ФИГ. 95 является диаграммой, описывающей одну форму системы, содержащей контрольную систему 1400, приводной двигатель 1402 и источник питания 1404 для применения с хирургическим инструментом, использующим электромеханический упор, который может включать механический мягкий или жесткий упор согласно различным аспектам. Хирургическая система содержит источник питания 1404, оперативно соединенного с приводным двигателем 1402 через контрольную систему 1400. Источник питания 1404 может быть сконструирован для поставки электроэнергии к приводному двигателю 1402 для перемещения приводного элемента, такого как приводной элемент 158. В определенных аспектах источник питания 1404 может содержать любой удобный источник питания, такой как аккумулятор, розетка, генератор или что-либо подобное. Контрольная система 1400 может содержать различные модели или схемы и может оперативно контролировать различные компоненты системы, например, приводной элемент 158, источник питания 1404 или интерфейс пользователя. Контрольная система 1400 может быть сконструирована для контроля, мониторинга или измерения различных операций, сигналов. вводных и выходных данных или параметров инструмента 10, например.
В различных формах контрольная система 1400 может быть аналогичной контрольной системе 800, описанной выше. Например, в различных аспектах контрольная система 1400 может быть сконструирована для «электрической генерации» множества контрольных движений. Термин «электрическая генерация» относится к применению электрических сигналов для активации или контроля иным путем двигателя 1402, например, моторов 402, 530, 560 и 610, или других электроприборов и может быть определена как отличная от контрольных движений, который генерируются вручную или иным путем без применения электрического тока. Например контрольная система 1400 может электрически генерировать контрольное движение, такое как вращательное контрольное движение, включающее подачу питания на приводной двигатель которое может быть ответом на команду пользователя, такое как электрический сигнал, данный контрольной системе путем активации активатора, такого как привод или пусковой триггер, связанные с узлом рукоятки 20. В определенных аспектах контрольная система 1400 может электрически генерировать вращательное контрольное движение, включающее прекращение поставки питания к приводному двигателю 1402, которое может быть ответом пользователю или смещением механизма, возвращающего активатор или пусковой триггер в открытую позицию. По меньшей мере в одном аспекте контрольная система 1400 может электрически генерировать вращательное контрольное движение, включающее прекращение или снижение поставки питания к приводному двигателю 1402 в соответствии с измеряемым электрическим параметром, достигающим предварительно заданного значения. Например, контрольная система 1400 может прекратить поставку питания к приводному двигателю 1402 когда измеряемый ток достигает предварительно заданного порога.
При рассмотрении в целом ФИГ.1 и ФИГ. 94 и 95 в различных формах, хирургический инструмент 10 содержит блок рукоятки 20, оборудованный пользовательским интерфейсом, сконструированным для передачи активационного сигнала от пользователя, например, клинициста, к контрольной системе 1400 электрически генерировать контрольное движение соответственно узла удлиненного стержня 30, концевого зажима 102 или приводного элемента 158. Например, в определенных аспектах, интерфейс пользователя содержит блок триггера, содержащий активационную или триггерную часть для передачи входящего сигнала к контрольной системе 1400 контролировать подачу питания на приводной двигатель 1402, такой как пусковой двигатель 530 (см. ФИГ. 23). Блок может содержать закрывающий триггер для закрытия и/или блокирования узла упорного элемента 190, и пусковой триггер для активации концевого зажима 102, например, проведение приводного элемента 158 через приводной такт. Во время работы закрывающий триггер может быть активирован в первую очередь, таким образом приводя блок упора 190 в закрытую позицию, например, захватывая ткань между картриджем со скобками 130 и узлом упорного элемента 190. Когда хирурга устраивает положение концевого зажима 102, он может оттянуть закрывающее пусковое устройство в фиксированное положение полного закрытия. Пусковое устройство может затем быть переведено из открытой позиции в закрытую позицию для проведения передаточного элемента 158 через приводной такт. В различных аспектах пусковое устройство может возвращаться в открытую позицию когда клиницист прекращает давление, или может быть механически возвращаемым в открытую позицию через оперативное соединение с активацией приводного элемента 158 или отдельный механизм. В одном аспекте пусковое устройство может быть мультипозиционным триггером, где при достижении приводным элементом 158 позиции около или в конце такта, пусковое устройство может быть активировано из второй открытой позиции во вторую закрытую позицию для активации приводного элемента 158 проксимально, в направлении исходной позиции. В некоторых подобных аспектах первая и вторая открытая и закрытая позиции могут быть по существу одной и той же. В зависимости от желательной конструкции, в определенных аспектах, высвобождающая кнопка или защелка могут быть сконструированы для высвобождения закрывающего устройства из блокированной позиции. Как объясняется более подробно ниже, после активации пускового устройства из открытой позиции в закрытую позицию, пусковое устройства может быть оперативно расцеплено, например, активация пускового устройства может привести к первоначальной активации входящего сигнала, который может быть направлен на контрольную систему 1400 для инструктирования контрольной системы 1400 активировать приводной элемент 158. В определенных конструкциях, где отсутствует характеристика коррекции со стороны пользователя, активация пускового элемента 158 будет прекращена около или в конце такта действием, инициированным контрольной системой, т.е., отключение или прерывание подачи питания к приводному двигателю, даже если пусковое устройство находится в закрытой позиции.
В одной форме блок пускового устройства содержит контрольный рычажный переключатель, который может быть аналогичным контрольному рычажному переключателя 840, описанному выше. Например, как показано на ФИГ. 33-39, контрольный рычажный переключатель может преимущественно позволять пользователю максимизировать функциональный контроль различных аспектов хирургического инструмента 10 с помощью одного интерфейса. В одном аспекте контрольный рычажный переключатель 842 может оперативно подключаться к блоку рычажного переключателя 850, который подвижно размещен внутри блок корпуса переключателя 844, так что блок корпуса переключателя 844 размещен внутри пистолетного захвата 26 узла рукоятки 20. Блок корпуса переключателя 844 может включать смещающий элемент 856 для смещения узла рычажного переключателя 850 и штангу контрольного рычажного переключателя 842 в желаемую позицию, когда он не размещается снаружи, например, пользователем. Контрольный рычажный переключатель 840 может быть электрически подсоединен к контрольной системе 1400 для передачи контрольных инструкций контрольной системе 1400. Например, манипуляции штангой контрольного рычажного переключателя 842, такие как нажим или направляющее движение, могут позволить пользователю контролировать различные контролирующие движения, связанные с хирургическим инструментом 10, которые могу включать активацию приводного элемента 158.
Как описано выше, различные формы хирургического инструмента 10 содержат один или несколько электрических двигателей, таких как двигатели 402, 530, 560 и 610. Один или несколько двигателей могут, к примеру, размещаться в части узла рукоятки 20 или удлиненного стержня 30 инструмента 10 и могут вести приводной элемент 158 между исходной позицией и концом такта. В одной форме двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. В определенных конструкциях двигатель может работать во вращательном или линейном активационном режиме, например, линейный активатор, и может включать трансмиссионное соединение между приводным двигателем 1402 и приводным элементом 158 для преобразования вращательного движения приводного двигателя 1402 в линейное движение, или соединительного вращательного движения между множеством компонентов. В различных формах трансмиссионное соединение, включающее одну или несколько шестерней или элементы с взаимным зацеплением, такие как ремни или шкивы, работает для передачи вращательного движения от приводного двигателя 1400 к одному или нескольким сегментам узла удлиненного стержня 30 для активации концевого зажима 102. Например, вращение приводного винта концевого зажима 180 в первом направлении заставляет приводной элемент 158 двигаться в первом направлении, например, дистальном направлении, вдоль оси стержня А-А. В различных аспектах вращение приводного винта концевого зажима 180 во втором направлении, противоположном первому, заставляет приводной элемент 158 двигаться во втором направлении, например, в проксимальном направлении вдоль оси стержня А-А. В одном аспекте приводной двигатель 1400 ведет приводной элемент 158 дистально к концу такта и обладает обратным действием для ведения приводного элемента 158 проксимально к исходной позиции. Например, приводной двигатель 1402 может стать обратимым, путем, например, изменения полярности в подаче напряжения, таким образом производя обратное вращение или движение двигателя и, соответственно, обратное движение приводного элемента 158. Следовательно, приводной элемент 158 может перемещаться между позициями вдоль приводного такта в как проксимальном так и дистальном направлении обычными методами, или методами, раскрытыми в заявке на патент США, серийный № 12/235 782, которая полностью включена в настоящий документ путем ссылки. Примечательно, что хотя инструменты 10, описанные в настоящем документе, в целом относятся к инструментам, которые следует держать в руке, содержащим рукоятку, в различных формах, инструменты 10, содержащие механические упоры, которые могут функционировать как часть электромеханического упора, могут быть адаптированы для применения в роботизированных или подобных приборах, используемых роботизированными системами.
В определенных аспектах хирургический инструмент 10 содержит реверсивный двигатель и включает проксимальный механический упор и дистальный механический упор. В различных аспектах, как описано выше, активация пусковых устройств сигнализирует активировать приводной элемент 158 через приводной такт. Когда приводной элемент 158 достигает конца приводного такта, например, когда режущий элемент 160 достигает дистального конца его режущего такта, конец такта или переключатель направления, например, может быть переключен в закрытую позицию, меняя полярность напряжения, которое подается на двигатель 1402 для изменения таким образом направления вращения двигателя 1402. Такой переключатель может быть связан с контрольной системой 1400 и может быть дополнением или альтернативой прекращению подачи питания на приводной двигатель 1402. Примечательно, однако, что в других аспектах переключатель с ручным возвратом может обращать вращение двигателя 1402 и возвращать приводной элемент 158 в его первоначальную или исходную позицию.
Механический упор расположен на или возле конца такта и сконструирован для увеличения сопротивления движению приводного элемента 158 через конец такта. Механический упор включает мягкий упор, содержащий пару амортизаторов 174, каждый из которых функционально подключен к элементу сопротивления 175. Амортизаторы 174 сконструированы для контакта с приводным элементом 158 на или в конца такта. Например, амортизаторы 174, показанные на ФИГ. 94 сконструированы для контакта с контактной поверхностью 173 по меньшей мере одного клина 172. В различных аспектах амортизаторы 174 могут соответствовать по размеру контактной поверхности 173. Например, по меньшей мере в одном аспекте амортизаторы 174 могут быть соответствующего размера для представления косой поверхности по существу эквивалентной контактной поверхности 173. Таким путем стабильность контакта между амортизаторами 174 и клиньями 172 может быть увеличен и сила, приложенная к контактной поверхности 173 может быть распределена по большей структурной области клиньев 174. Аналогично, в одном аспекте, амортизаторы 174 содержат гибкую, такую как эластик, или амортизирующую поверхность для приема контактной поверхности 173 и снижения степени разрушения компонентов. В одной форме элементы сопротивления 175 каждый содержат пружину 176, расположенную между амортизатором 174 и жестким упором 178 для обеспечения сопротивления и замедления приводного элемента 158 в или около конца такта 158.
Становится очевидно, что различные аспекты хирургических инструментов 10 могут быть снабжены многочисленными амортизаторами 174, и элементы сопротивления 175 могу быть структурированы для контакта с другими частями приводного элемента 158. Например, инструмент 10 может содержать дополнительный упор, который может быть дополнением или замещением верхнего жесткого упора 178 и/или конструкций мягкого упора. Таким образом, в одной форме, согласно ФИГ. 94 приводной винт 180 может быть снабжен упором, который может включать мягкий упор, содержащий амортизатор 290, связанный с элементом сопротивления 291, расположенным вдоль приводного такта и противостоящим контактной поверхности 292 приводного элемента 158. В одной форме элемент сопротивления 291 содержит эластомерный материал, который способен сжиматься между амортизатором 292 и жестким упором 294 для поглощения продольной силы приводного элемента 158. В некоторых аспектах многочисленные мягкие поры могут быть сконструированы для контакт с приводным элементов 158 в различных предварительно заданных позициях. Например, в одной форме приводной элемент 158 контактирует с амортизатором 290 до амортизаторов 174, например, для подачи более четко идентифицируемый пик тока, например, для производства пика напряжения, содержащего два явно различимых компонента пика напряжения, магнитуду и/или полное отделение которого может использоваться для повышения вероятности возникновения пика напряжения.
В различных формах элементы сопротивления 175 содержать сжимаемую часть, которая может быть или не быть связана с жестким упором 178. Например, в одном аспекте элемент сопротивления 175 может размещаться между жестким упором 178 и амортизатором 174, и может включать сжимаемую часть, такую как пружина 176, эластомерный материал, такой как полимер, пена или гель. Во время работы амортизатор 174 может быть ускорен в направлении сжимаемой части при контакте с приводным элементом 158, где сжимаемая часть сжимается в заданной степени. В различных аспектах элемент сопротивления 175 может содержать замедляющую часть, например, тормоз. В одном аспекте замедляющий элемент содержит сжимаемую ячейку, такую как гидравлическая пневматическая ячейка, через которую контакт с приводным элементом 158 может нажать на пистон, расположенный внутри ячейки, для увеличения давления, сконструированный для замедления или торможения приводного элемента 158. В определенных аспектах мягкий упор может быть сконструирован для оказания мягкого или постепенно возрастающего сопротивления и/или замедления в соответствии со временем и/или расстоянием. Например, одна или несколько скрученных пружин, обладающих одинаковой или разной способностью к сжатию, могут быть структурированы или расположены для точного контроля замедления или торможения замедляющего элемента, например, в постепенной или пошаговой манере. В одной форме мягкий упор может быть структурирован для оказания нарастающего сопротивления дистальному движению приводного элемента 158.
В различных формах мягкий упор включает смещающий элемент, сконструированный для смещения контактного элемента от жесткого упора. Становится очевидно, что в некоторых аспектах смещающий элемент может быть таким же или обладать компонентами, аналогичными компонентам элементов сопротивления 175. Таким образом, в некоторых формах смещающий элемент может быть структурирован для сжатия между амортизатором 174 и жестким упором 178 продольно направленной силой приводного элемента 158 и после этого возвращаться в состояние, предшествующее сжатию, после прекращения действия силы. В определенных аспектах смещающий элемент может активироваться, перемещаться и/или сжиматься для противодействия активации движения приводного элемента 158. Примечательно, что сжатие или иное противодействие смешению, связанное с элементами сопротивления 175 может привести к передаче энергии, которая может, по меньшей мере временно, сохраняться или фиксироваться мягким упором в состоянии потенциальной энергии. В одном аспекте элементы сопротивления 175 могут удерживаться в положении потенциальной энергии защелкой, крюком или препятствием, например, которое может не позволять одному или нескольким элементами сопротивления 175 вернуться в состояние, предшествующее сжатию. Как преимущество, накопленная энергия может быть высвобождена, например, пользователем и/или контрольной системой 1400, где по меньшей мере часть накопленной энергии используется для возврата приводного элемента 158 в исходное положение.
В различных аспектах элементы сопротивления 175 могут содержать дополнительные конструкции. Например, в одном аспекте, один или несколько магнитов, таких как постоянные магниты, могут быть расположены для отталкивания противоположного постоянного магнита, связанного с приводным элементом 158. Например, один или несколько магнитов могут быть способны вращаться или перемещаться для подстраивания размера отталкивающих магнитных полей, противостоящих продольному движению. Другие различные аспекты могут использовать магнитные катушки, электрически соединенные к контрольной системе для активации перед или после успешного замедления приводного элемента 158. Дополнительные элементы сопротивления 175 могут содержать возвратно-поступательные структуры, включая конструкции, использующие шкивы и/или шестерни, к примеру.
В различных аспектах механический упор, содержащий мягкий упор, может быть или не быть связан с жестким упором 178. Например, в некоторых формах мягкий упор включает жесткий упор 178, в то время как в других формах мягкий упор не включает жесткий упор, или жесткий упор 178 может функционировать как осевой упор. В некоторых формах мягкий упор может содержать пружинный жесткий упор 178 для создания постепенного и/или прогрессирующего сопротивления приводному такту или замедлению приводного элемента 158. Например, мягкий упор может быть сконструирован для постепенного снижения скорости движения приводного элемента 158 путем создания сопротивления проксимальной или дистальной силе, приложенной к приводному элементу 158 приводным двигателем 1402, или присутствия в инерции системы. По меньшей мере в одной форме магнитуда сопротивления, оказываемого мягким упором для противодействия или замедления активации или движения, может избирательно регулироваться. Например, инструмент 10 может быть оборудован одним или несколькими мягкими упорами, которые могу избирательно скользить или вращаться в множестве позиций вдоль приводного такта. Таким образом, пользователь может индивидуализировать положение мягкого упора для частного применения. В одной форме электромеханический прибор, содержащий мягкий упор, может включать регулируемый диск для регулирования сопротивления, оказываемого мягким упором вдоль конца такта. В некоторых подобных формах регулирование диска может одновременно регулировать продольное расстояние, охватываемое мягким упором и, соответственно, конец такта, так же как и предельные значения, связанные с определением пика напряжения, как подробно объясняется ниже. В одной форме предупредительный сигнал может быть предоставлен пользователем, когда ручная настройка ориентирована ниже предварительно заданной механической переносимости.
Обратимся снова к ФИГ. 95: в различных формах контрольная система 1400 сконструирована для формирования и/или ответа на полученную информацию, которая может быть, по меньшей мере частично, получена из информации, измеренной контрольной системой 1400 или полученной от других системных компонентов. Например, в одном аспекте контрольная система 1400 может быть сконструирована для инициирования подачи питания к системным компонентам в ответ на входящий сигнал, такой как инструкции, предоставленные пользователем. В определенных аспектах контрольная система 1400 может генерировать или предоставлять информацию, такую как предупреждение или состояние инструмента, пользователю через пользовательский интерфейс, такой как визуальный или аудио дисплей. Сигналы или вводные, генерированные контрольной системой 1400 могу быть, к примеру, ответом на другие сигналы или вводные команды, полученные от пользователя, компонентов инструмента, или могут быть функцией одного или нескольких измерений, связанных с инструментом 10. В определенных аспектах контрольная система 1400 может быть сконструирована для мониторинга или получения различных измерений и затем интерпретировать, рассчитывать и/или декодировать информацию и отвечать предварительно заданным путем.
В одном аспекте контрольная система 1400 включает или может быть избирательно связана с полупроводником, компьютерным чипом или запоминающим устройством. Как указано выше, вводные, предоставленные или полученные из контрольной системы 1400, такие как те, которые предоставил пользователь или произвела контрольная система 1400 в ответ на инструкции, сигналы или измеренные параметры, могут быть аналоговыми или цифровыми. Соответственно, в некоторых формах контрольная система 1400 может быть сконструирована для отправки и приема аналоговых или цифровых вводных данных или сигналов от или на компоненты инструмента. В различных аспектах контрольная система 1400 может использовать программное обеспечение, которое может задействовать один или несколько алгоритмов для дальнейшего формулирования входящих сигналов для контроля и мониторинга компонентов инструмента. Сформулированные таким образом входящие сигналы могут быть функцией критериев, измеренных и/или рассчитанных контрольной системой 1400 или, в некоторых случаях, предоставленных контрольной системе 1400 другим компонентом инструмента, пользователем или отдельной системе, оперативно связанной с контрольной системой 1400. Например, контрольная система 1400 может отвечать путем активации или деактивации приводного двигателя 1402, прекращением, инициированием подачи питания к приводному двигателю 1402 или дополнительным компонентам системы, или предоставлением инструкций или дополнительных вводных данных для этих или других операций. В различных аспектах контрольная система 1400 может содержать схемы, например транзисторы или переключатели, сконструированные для отслеживания электрических параметров, связанных с функционированием инструмента 10. Например, схемы контрольной системы могут быть сконструированы для активации или деактивации пускового двигателя 1402 или открытия или закрытия пути подачи питания на приводной двигатель 1402 когда электрические параметры, связанные с работой инструмента 10 достигают порогового значения, например, пик напряжения, как установлено конструкцией схем.
В определенных формах хирургический инструмент 10 и системы, которые используют механический упор, могут функционировать без обратной связи. Например, в одной форме инструменты могут функционировать без помощи устройства обратной связи, сконструированного для предоставления контрольной системе 1400 информации относительно того, как инструмент 10 отвечает на входящую информацию, так что контрольная система 1400 может модифицировать исходящие данные. В различных аспектах, как представлено выше, контрольная система 1400 могут отслеживать подачу питания на приводной двигатель 1402 для определения позиции в конце такта приводного элемента 158. То есть, к примеру, контрольная система 1400 путем применения различных техник отслеживания напряжения, с помощью которых ток, точнее, пики напряжения, могут быть заданы и, по меньшей мере частично, определены с помощью механического упора. Например, контрольная система 1400 может отслеживать напряжение для определения тока с учетом подачи питания на приводной двигатель 1402 и, соответственно, приводной элемент 158 как описано выше. Сопротивление приводному такту увеличивает кручение приводного двигателя 1402, приводя к появлению заметных пиков напряжения с учетом питания, поданного на приводной двигатель 1402. Таким образом, крупный пик напряжения может быть измерен контрольной системой 1400 когда приводной элемент 158 контактирует с механическим упором; в это время контрольная система 1400 может ответить прекращением подачи питания на приводной двигатель 1402. Следовательно, механический упор предоставляет физическую силу для замедления приводного элемента 158 и производить пик напряжения, который может быть определен контрольной системой 1400 для инициирования отключения приводного двигателя 1400.
Как описано выше, в определенных аспектах контрольная система 1400 сконструирована для контроля различных действий инструмента 10. Например, в определенных аспектах контрольная система 1400 содержит контрольную схему 1406, оперативно подсоединенную к приводной схеме 1408. Приводная схема 1408 может быть сконструирована для подачи питания от источника питания 1404 на приводной двигатель 1402 для движения приводного элемента 158. Контрольная схема 1406 может быть сконструирована для контроля подачи энергии на приводную схему 1408. Следовательно, контрольная схема 1406 может быть сконструирована для контроля приводного двигателя 1402 путем контроля подачи энергии на приводную схему 1408. Контрольная схема 1406 может также быть сконструирована для отслеживания, например, выборки или измерения питания, поданного на приводной двигатель 1402. Например, контрольная схема 1406 может делать выборку входящего/исходящего напряжения и/или тока на одной или нескольких точках приводной схемы 1408 через которую приводной двигатель 1402 получает питание для активации приводного элемента 158. В различных аспектах контрольная схема 1406 может включать или быть подсоединенной к приводной схеме 1408, через которую она может отслеживать входящее/исходящее напряжение, например через резистор, подсоединенный к токовому контуру, связанному с приводной схемой 1408, к примеру. Как заметят специалисты в данной области науки, приведенное выше описание является только одним способом измерения и/или отслеживания питания, поданного на приводной двигатель 1402, и далее поймут, что питание может аналогичной быть измерено и/или отслежено с помощью альтернативных методов, известных в данной области, и, соответственно, подобные методы находятся в пределах настоящего раскрытия. В некоторых формах, когда контрольная схема 1406 обнаруживает скачок напряжения, подаваемого на приводной двигатель 1402, контрольная система 1400 прекращает подачу энергии на приводной двигатель 1402 через приводную схему 1408. В различных аспектах контрольная система 1400 может также разрывать функциональное соединение, например, трансмиссию между приводным двигателем 1402 и приводным элементом 158 по меньшей мере моментально, в ответ на измеренный скачок напряжения.
В определенных конструкциях, когда электромеханические упоры содержать жесткий упор, сконструированный для внезапной остановки приводного такта, инструмент 10 может быть восприимчив к механическим неполадкам в соответствии, к примеру, с временным периодом между обнаружением скачка напряжения и последующего освобождения от активирующей силы, предоставленной приводным мотором 1402. Дополнительно, в соответствии с инерцией системы, е примеру, приводной элемент 158 может также продолжать быть активированным или ведомым после достижения конца такта, несмотря на прекращение подачи питания на приводной двигатель 1402. В некоторых случаях задержка в освобождении приводного элемента 158 от активирующей силы может привести приводной элемент 158, приводной двигатель 1402, приводной винт 180 или другое трансмиссионное соединение к механическому повреждению.
ФИГ. 96 является графической иллюстрацией, описывающей изменения тока во времени, связанные с инструментом 10, использующим электромеханический упор, который содержит жесткий упор 178 без мягкого упора. Ток между временем А, соответствующим позиции приводного элемента 158 проксимально к концу такта, и временем В, соответствующим позиции приводного элемента 158 при контакте с жестким упором 178 в конце такта, является относительно низким или стабильным. Однако, в момент времени В происходит скачок напряжения, презентуя контакт между приводным элементом 158 и жестким упором, расположенным на конце такта. Соответственно временному периоду между обнаружением скачка напряжения спустя некоторое время после времени В и прекращением подачи питания на приводной двигатель 1402, приводной двигатель 1402 продолжает вести приводной элемент 158, хотя и безуспешно, на жесткий упор 178 до времени С, когда подача питания на приводной элемент 158 прекращается. Хотя это и не показано, инерция системы может также продолжать вести приводной элемент 158 на жесткий упор 178 на протяжении некоторого времени после времени С.
Как указано выше, делая удобной работу в без обратной связи, хирургические инструменты, работающие как показано на ФИГ. 76 могут быть уязвимы для механических повреждений из-за, к примеру, временного период между обнаружением скачка напряжения и последующим освобождением от активирующего движения. Согласно различным формам и ФИГ. 97 и 98, инструменты 10, раскрытые в настоящем документе, могут содержать электромеханические упоры, содержащие структуру мягкого упора для контакта и замедления приводного элемента 158 до достижения конца такта для индуцирования определяемого скачка напряжения, таким образом увеличивая количество времени, на протяжении которого контрольная система 1400 должна обнаружить и ответить на скачок напряжения. Хирургический инструмент 10 включает различные характеристики, аналогичные проиллюстрированным на ФИГ. 1 и 70; таким образом аналогичные характеристики идентифицированы подобными цифровыми обозначениями и, для простоты, не будут описываться снова. Инструмент 10 включает электромеханический упор, который содержит мягкий упор для противостояния движению приводного элемента 158 на или возле конца приводного такта или его сегмента, такого как проксимальная исходная позиция или дистальный конец такта, проходящий между первой позицией мягкого упора S1 и второй позицией мягкого упора S2 вдоль оси стержня A-A. Электромеханический упор также содержит жесткий упор 178, расположенный в позиции Н. Мягкий упор содержит амортизатор 174 и элемент сопротивления 175, расположенный на или возле конца такта, например, по меньшей мере частично в пределах первой позиции мягкого упора S1 и второй позицией мягкого упора S2. Амортизатор 174 и элемент сопротивления 175 функционируют для предоставления сопротивления приводному элементу 158 в пределах конца такта, определенного между первой позицией мягкого упора S1 и второй позицией мягкого упора S2. В различных формах амортизатор 174 и элемент сопротивления 175 могут также функционировать с целью замедления приводного элемента 158 от первой позиции мягкого упора S1 до второй позиции мягкого упора S2. В определенных формах мягкий упор может располагаться в любом предпочтительном месте, где желательно предоставить сопротивление или начать замедление приводного элемента 158.
ФИГ. 97 показывает приводной элемент 158 в процессе прохождения через приводной такт в позиции проксимальной относительно первой позиции мягкого упора S1. ФИГ. 98 изображает приводной элемент 158 после полного прохождения через пусковой такт за первую позицию мягкого упора S1 конца такта, так что он расположен на второй позиции мягкого упора S2, конца такта. Соответственно, мягкий упор расположен таким образом, чтобы контактировать с приводным элементом 158 на первой позиции мягкого упора S1 и таким образом оказываться давление дистально в направлении второй позиции мягкого упора S2 в силу компрессивного взаимодействия с жестким упором на позиции Н. Соответственно, вторая позиция мягкого упора S2 может эффективно содержать позицию жесткого упора Н* с учетом приводного элемента и экстремально дистальной конечной часто конца такта. В различных аспектах приводной элемент 158 может полностью или в достаточной степени замедляться перед достижением позиции жесткого упора Н* на второй позиции мягкого упора S2. Таким образом, в подобных аспектах, жесткий упор, при наличии такового, может содержать резервный или предохранительный элемент.
Сопротивление активационному движению, оказываемое механическим упором, которое может сопровождаться замедляющей или остановочной силой, может быть постепенным, прогрессивным или пошаговым в относительно расстояния и/или времени, например. Таким образом, в некоторых аспектах, мягкий упор представляет дорожку увеличенного сопротивления между первой позицией мягкого упора S1 и вторая позиция мягкого упора S2. Примечательно, что конец такта не обязательно предполагает, что функциональное действие приводного элемента продолжается сквозь весь конец такта, например, до второй позиции мягкого упора S2. Например, в одной форме, конец такта расположен на или немного проксимально от наиболее дистальной скобы. В другой форме положение первоначального контакта с мягким упором, например, на первой позиции мягкого упора S1, является дистальным относительно наиболее дистальной скобы. Таким образом, приводной элемент 158 может не контактировать или испытывать существенное сопротивление продольному движению через приводной такт до тех пор, пока не будет выдвинута самая дистальная скоба, в момент чего возрастает сопротивление и/или замедление. Таким образом движение приводного элемента не будет преждевременно ограничено действием контрольной системы 1400.
ФИГ. 75 является графической иллюстрацией, описывающей изменения тока во времени, связанные с инструментом 10, содержащим электромеханический упор с мягким упором, согласно некоторым аспектам. Ток между временем А*, соответствующим позиции приводного элемента 158 проксимально к концу такта, и временем В*0, соответствующим позиции приводного элемента 158 при контакте с мягким упором, например, амортизатором 174, является относительно низким или стабильным. Однако, после времени В*0 ток постепенно начинает демонстрировать скачки, указывающие на растущее сопротивление продольному движению приводного элемента. В различных аспектах постепенный рост сопротивления может преимущественно увеличить промежуток времени, в который появляются скачки, например, между временем B*0 и B*2, эффективно замедляя ответное время для предоставления контрольной системе 1400 времени на реакцию, таким образом минимизируя неблагоприятные эффекты временного промежутка, объясненные выше относительно ФИГ. 96. В определенный аспектах контрольная система 1400 может отслеживать напряжение и измерять ток, подаваемый на приводной двигатель 1402, как описано выше. Контрольная система 1400 может быть сконструирована для ответа предварительно заданным образом на изменения тока. Например, при достижении порогового значения тока, к примеру в момент времени B*1, контрольная система 1400 может прекратить подачу питания на приводной двигатель 1402. В одной конструкции пороговое значение тока может содержать временной компонент. Например, пороговое значения тока может включать дифференциал тока в указанный период времени. В определенных конструкциях скачок тока может содержать один из множества предварительно заданных пороговых значений тока, каждое из которых определено соотношением дифференциала тока с временным периодом. Как видно на ФИГ. 99, постепенный рост сопротивления может также преимущественно снизить динамическую нагрузку на концевой зажим 102 при контакте с жестким упором во время B*2, также как и уменьшить временной период B*2 до C*, в который приводной двигатель 1402 продолжает перемещать приводной элемент 158 к жесткому упору 178 после прекращения дистального движения.
В определенных аспектах контрольная система 1400 может определять, что предварительно заданное пороговое значение тока, измеренное, например, ростом или спадом тока во времени, достигнуто и может после этого прекратить сигнал подачи питания на приводной двигатель 1402. Например, в одной конструкции контрольная система 1400 может отслеживать ток и, соответственно, прекращать подачу питания на приводной двигатель 1402, когда магнитуда тока превышает предварительно заданное значение на протяжении данного временного периода. В различных аспектах эти или иные значения, такие как пороговые значения, могут быть отрегулированы пользователем, к примеру, вручную или получив доступ к внутреннему протоколу через управляющее звено, например, компьютер. По меньшей мере в одной конструкции приводная схема 1408 или контрольная схема 1406 содержит изменяемый резистор, так что пользователь может изменять ток, подаваемый на приводной двигатель 1402, путем изменения степени активации с помощью пускового устройства. Например, вращение пускового двигателя 530 может быть пропорционально давлению или движению, которое пользователь применяет к активатору или пусковому устройству. В одной форме контрольная схема 1406 может связываться с приводной схемой 1408, так что пороговые значения могут быть повышены или нормализованы.
В определенных конструкциях множество датчиков или электрических компонентов может использоваться в концевом зажиме 102 для предоставления различных форм обратной связи пользователю. В одном аспекте датчики могут предоставлять обратную связь контрольной системе 1400 для автоматического контроля различных двигателей, связанных с инструментом. Например, в одном аспекте хирургический инструмент содержит несколько двигателей, таких как двигатели 402, 530, 560 и/или 610, которые приводятся в действие одной или несколькими контрольными системами, такими как контрольные системы 800 и 1400, для электрической генерации контрольных движений. Контрольные системы могут быть сконструированы для оперативного контроля двигателей и получения позиционной обратной связи от множества датчиков, сконструированных для отслеживания позиционной информации. В определенных аспектах контрольные системы могут использовать позиционную информацию для электрической генерации измененных или модулированных контрольных движений через контроль подачи питания на одни или несколько двигателей или, к примеру, может предоставлять различную позиционную информацию пользователю. В различных аспектах контрольные системы способны работать в гибридных системах незамкнутого/замкнутого цикла. Например, контрольная система 1400 может быть сконструирована для управления приводным двигателем 1402, таким как пусковой мотор 530, в незамкнутом цикле, как описано в настоящем документе, в то же время также управляя различными другими двигателями, такими как двигатель вращения стержня 610, например, в замкнутом цикле. В одном аспекте контрольная система 1400 может быть сконструирована таким образом, что пользователь может выбирать, какие моторы контрольной системы 1400 могут работать в замкнутом или незамкнутом цикле, например, для индивидуализации действия инструмента 10 по желанию.
Становится очевидным, что один или несколько вводов могут быть предоставлены пользователем, что может быть или не быть предметом оценки для контрольной системы 1400. Например, контрольная система 1400 может включать перекрывающий режим, в котором один или несколько вводов, предоставленных контрольной системе 1400 одним или несколькими пользователями или другими контрольными системами, связанными с контрольной системой 1400, могут быть переданы и/или предоставлены инструменту 10. Например, когда приводной элемент 158 находится в исходной позиции, контрольная система 1400 может заблокировать, предупредить или игнорировать инструкции по соединению подачи энергии с приводным двигателем 1402 или иным способом задействовать приводной двигатель 1402 для электрической генерации активационного движения приводного элемента 158. По меньшей мере в одном аспекте блокировка возникает или является состоянием по умолчанию или воздействует на систему до возникновения одного или нескольких событий, таких как закрытие упорного элемента 190, или адекватной механической или электрической обратной связи, такой как, например, блокировка компонентов, перекрытие, инициированное пользователем, изменение в измеряемом параметре на, возле или вдоль пути приводного элемента.
В различных аспектах один или несколько механических упоров, в том числе конструкции мягких упоров, согласно настоящему раскрытию, могут поставляться набором. Набор может иметь специфическое применение для одного или нескольких выбранных устройств или быть универсальным или модифицируемым для универсального применения в множестве устройств. Например, набор конструкций мягкого упора может содержать запасной замедляющий элемент, такой как элемент сопротивления и/или контактные элементы, такие как амортизаторы. В одной форме набор включает запасные или вторичные втулки, которые могут быть использованы в качестве или быть пригодными для вставки в корпус, подобранный по размеру для поддержки элемента сопротивления с целью увеличения сопротивления, предоставляемого мягким упором в одной или нескольких локациях вдоль приводного такта. В различных формах для регулирования просвета между упором и корпусом устройства могут поставляться прокладки. В некоторых аспектах контактный элемент может включать постоянную или временную, такую как запасная, модифицируемая или модернизируемая, контактная защита, сконструированная для расположения между приводным элементом и амортизатором, элементом сопротивления и/или жестким упором. Контактная защита может быть сформирована из эластичного или иного материала, который способен по меньшей мере частично сжиматься при контакте с ускоренной массой приводного элемента или прижатии к мягкому или жесткому упору. Один из аспектов защиты может быть полимером, который может смачиваться, скользить, разрываться или быть вплавленным в часть, такую как контактная поверхность приводного элемента 158. В другом аспекте защита может разместиться на поверхности амортизатора 174. В еще одной группе аспектов амортизатор 174 может содержать контакт, сконструированный для контакта и по меньшей мере частичного поглощения силы ускоренной массы приводного элемента 158 для предупреждения или частичного ограничения степени физического повреждения или механической неисправности приводного элемента 158, приводного двигателя 1402, приводного винта 180 или связанных с ними компонентов.
В некоторых формах извлечение хирургического инструмента, такого как хирургический инструмент 10, показанный на ФИГ. 1 и 2, из пациента может быть затруднено, поскольку концевой зажим 102 может находиться в согнутой или повернутой позиции, не позволяя концевому зажиму 102 пройти сквозь троакар или иную точку доступа внутрь пациента. Клиницист может не знать о текущем шарнирном состоянии на концевом зажиме 102, таком как, например, согнутое вдоль шарнирной оси В-В, и может попытаться извлечь хирургический инструмент 10 без предварительного выпрямления концевого зажима 102. В различных формах хирургический инструмент может быть сконструирован таким образом, что его концевой зажим выпрямляется на основании входящих данных от датчика (например, инструмент может обладать концевым зажимом, выпрямляемым с помощью датчика). Таким образом, клиницист может убедиться, что концевой зажим 102 выпрямлен относительно шарнирной оси В-В перед извлечением концевого зажима 102 из пациента, например, через троакар. В различных формах датчик может быть сконструирован для запуска выпрямляющего события по мере извлечения концевого зажима из пациента.
ФИГ. 105 иллюстрирует одну из форм хирургического инструмента 5810, содержащего оборудованный выпрямляющим датчиком концевой зажим 5802. Датчик 5826а, 5826b может обнаруживать грубое проксимальное движение хирургического инструмента 5810. Грубое проксимальное движение может указывать на то, что хирургический инструмент 5810 извлекается из пациента, например, через троакар или внешнюю трубку. Может быть установлено минимальное пороговое проксимальное движение для предупреждения выпрямления концевого зажима 5802 в результате легкой проксимальной регуляции хирургического инструмента 5810 во время работы. В различных формах, когда грубое проксимальное движение хирургического инструмента 5810 превышает минимальный порог, датчик 5826а, 5826b может послать сигнал двигателю, такому как, например, шарнирный контрольный двигатель 402, заставляющий двигатель выпрямить концевой зажим 5802.
В некоторых формах датчик 5826а, 5826b может располагаться в стержне 5831, концевом зажиме 5802, рукоятке 5820 или любой другой локации для обнаружения грубого проксимального движения хирургического инструмента 5810. В различных формах датчик 5826а, 5826b может содержать любой пригодный датчик для обнаружения движения хирургического инструмента 5810. Например, датчик 5826а, 5826b может содержать датчик, сконструированный для измерения ускорения, такой как акселерометр. Когда акселерометр обнаруживает ускорение в проксимальном направлении, превышающее предварительно заданный порог, акселерометр может послать сигнал на шарнирный контрольный двигатель 402 для активации процесса выпрямления. В качестве другого примера, датчик 5826а, 5826b может содержать датчик сближения, такой как магнитный датчик, датчик эффекта Холла, герконовое реле или любой другой пригодный датчик сближения. В различных формах датчик сближения может быть сконструирован для измерения близости датчика 5826а, 5826b к фиксированной точке, такой как троакар 5858 или внешняя трубка 5960. По мере извлечения хирургического инструмента 5810 в проксимальном направлении, сближение между датчиками 5826а, 5826b и фиксированной точкой может нарастать, заставляя датчик 5826а, 5826b посылать сигнал на шарнирный контрольный двигатель 402 для активации выпрямляющего процесса концевого зажима 5802. В различных формах многочисленные датчики могут быть добавлены для предоставления резервной проверки выпрямляющего процесса.
В одной форме первый датчик 5826а и второй датчик 5826b могут быть расположены на хирургическом инструменте 5810. Первый датчик 5826а может быть расположен на проксимальной части стержня 5831 и второй датчик 5826b может быть расположен на дистальной части стержня 5831. Специалисты в данной области науки поймут, что первый и второй датчики 5826а, 5826b могут располагаться на любой пригодной части хирургического инструмента 5810, такой как, например, рукоятка 5820, съемный хирургический модуль, стержень 5831 или выпрямляемый с помощью датчика концевой зажим 5802. В некоторых формах первый датчик 5826а может содержать акселерометр, сконструированный для обнаружения грубого проксимального движения хирургического инструмента 5810. В некоторых формах второй датчик 5826b может содержать датчик сближения, сконструированный для определения расстояния между вторым датчиком 5826b и фиксированной точкой, такой как, например, троакар 5858. В представленной на иллюстрации форме троакар 5858 содержит множество магнитов 5822. Множество магнитов 5822 может генерировать постоянное магнитное поле. Второй датчик 5826b может быть сконструирован для обнаружения роста интенсивности магнитного поля, указывая на движение второго датчика 5826b и, соответственно, выпрямляемого с помощью датчика концевого зажима 5802 в направлении троакара 5858.
В одной форме первый датчик 5826а и второй датчик 5826b могут быть сконструированы для активации выпрямляющего процесса выпрямляемого с помощью датчика концевого зажима 5802. Во время работы первый датчик 5826а может обнаруживать грубое проксимальное движение хирургического инструмента 5810 путем обнаружения проксимального ускорения свыше предварительно заданного порога. Первый датчик 5826а может посылать первый сигнал на шарнирный контрольный двигатель 402 для активации выпрямляющего процесса. В некоторых формах второй датчик 5826b может также обнаруживать грубое проксимальное движение концевого зажима путем обнаружения изменений в интенсивности магнитного поля между датчиком 5826b и фиксированной точкой, такой как троакар 5858. Второй датчик 5826b может посылать второй сигнал на шарнирный контрольный двигатель 402 для активации выпрямляющего процесса.
Как показано на ФИГ. 105, выпрямляемый с помощью датчика концевой зажим 5802 был согнут по шарнирной оси В-В (показана на ФИГ. 1). Выпрямляемый с помощью датчика концевой зажим 5802 может быть подсоединен к стержню 5831. Оператор может перемещать хирургический инструмент 5810 в проксимальном направлении, заставляя стержень 5831 и выпрямляемый с помощью датчика концевой зажим 5802 перемещаться в проксимальном направлении. Проксимальное движение может быть обнаружено первым датчиком 5826а. Первый датчик 5826а может содержать акселерометр. Первый датчик 5826а может посылать сигнал на шарнирный контрольный двигатель, такой как, например, шарнирный контрольный двигатель 402 для активации выпрямляющего процесса. Проксимальное движение также может быть обнаружено вторым датчиком 5826b. Второй датчик 5826b может содержать магнитный датчик сближения, такой как, например, датчик эффекта Холла или герконовое реле. Второй датчик 5826b может посылать сигнал на шарнирный контрольный двигатель 402 для активации выпрямляющего процесса. Второй датчик 5826b может посылать сигнал на шарнирный контрольный двигатель 402 независимо от первого датчика 5826а.
По мере того как клиницист извлекает хирургический инструмент 5810 из троакара 5858, выпрямляющий процесс выпрямляет выпрямляемый с помощью датчика концевой зажим 5802. После завершения выпрямляющего процесса выпрямляемый с помощью датчика концевой зажим 5802 находится в выпрямленном состоянии, как показано на ФИГ. 106. Выпрямленный выпрямляемый с помощью датчика концевой зажим 5802 может быть извлечен через троакар 5858 без нанесения повреждений пациенту или троакару 5858 и без необходимости вручную выпрямлять выпрямляемый с помощью датчика концевой зажим 5802 для клинициста. В некоторых формах хирургический инструмент 5810 может предоставлять сигнал обратной связи пользователю для индикации активации или прогресса процесса выпрямления. Например, в некоторых формах, светодиод (LED) может быть расположен на рукоятке 5820. LED может подсвечиваться во время выпрямляющего процесса для предоставления пользователю визуального указания на то, что происходит выпрямляющий процесс.
В некоторых формах первый и второй датчики 5826аб 5826b могут функционировать как дополнительная проверка выпрямляющего процесса. Например, в некоторых формах и первый и второй датчики 5826а, 5826b могут передавать сигнал активации выпрямляющего процесса на шарнирный контрольный двигатель 402. Сигнал от либо первого датчика 5826а, либо второго датчика 5826b может заставить шарнирный контрольный двигатель 402 выпрямить выпрямляемый с помощью датчика концевой зажим 5802. В некоторых формах выпрямляющий процесс может не выполняться до получения сигнала и от первого датчика 5826а, и от второго датчика 5826b. В некоторых формах либо первый датчик 5826а, либо второй датчик 5826b могут независимо активировать выпрямляющий процесс, но процесс может быть прерван если сигнал не получен и от первого, и от второго датчиков 5826а, 5826b в пределах предварительно заданного временного лимита. Например, выпрямляющий процесс может быть инициирован сигналом от первого датчика 5826а. Если сигнал не получен от второго датчика 5826b в течение предварительно заданного временного лимита, выпрямляющий процесс может быть отменен хирургическим инструментом 5810.
В некоторых формах хирургический инструмент 5810 может содержать датчик остановки. Датчик остановки может обнаруживать контакт между выпрямляемым с помощью датчика концевым зажимом 5802 и тканью во время процесса выпрямления. Если датчик остановки обнаруживает контакт между выпрямляемым с помощью датчика концевым зажимом 5802 и секцией ткани, датчик останови может послать сигнал на шарнирный контрольный двигатель 402 для деактивации процесса выпрямления с целью предотвращения повреждения пациента. В некоторых формах, когда датчик остановки определяет, что выпрямляемый с помощью датчика концевой зажим 5802 более не находится в контакте с частью ткани, датчик остановки может послать сигнал на шарнирный контрольный двигатель 402 для продолжения процесса выпрямления. В некоторых формах датчик остановки может послать сигнал оператору, например, через устройство обратной связи, с целью сообщить пользователю, что выпрямляемый с помощью датчика концевой зажим 5802 вошел в контакт с частью ткани и что процесс выпрямления был деактивирован. Датчик остановки может содержать, к примеру, датчик давления, расположенный на выпрямляемом с помощью датчика концевом зажиме 5802.
ФИГ. 107 и 108 иллюстрируют одну из форм выпрямляемого с помощью датчика концевого зажима 5902. В некоторых формах выпрямляемый с помощью датчика концевой зажим 5902 может быть введен в пациента через внешнюю трубку 5960. Внешняя трубка 5960 может содержать магнитное кольца 5922, расположенное на дистальном конце внешней трубки 5960. Первый датчик 5926а и второй датчик 5926b могут быть сконструированы для обнаружения движения выпрямляемого с помощью датчика концевого зажима 5902, когда стержень 5931 выводится из внешней трубки 5960. В некоторых формах первый датчик 5926а может включать акселерометр и второй датчик 5926b может содержать магнитный датчик сближения. Второй датчик 5926b может обнаруживать изменение в силе магнитного поля по мере того как второй датчик 5926b перемещаться в проксимальном направлении к магнитному кольцу 5922. По мере приближения второго датчика 5926b к магнитному кольцу 5922 второй датчик 5926b может генерировать сигнал инициировать процесс выпрямления концевого зажима 5902. Второй датчик 5926b может содержать любой пригодный датчик для обнаружения изменения в магнитном поле, такой как, например, герконовое реле или датчик эффекта Холла. Как обсуждалось выше, первый датчик 5926а и второй датчик 5926b могут служить дополнительными средствами проверки процесса выпрямления. Специалисты в данной области науки поймут, что в некоторых формах может быть включен только первый датчик 5926а или второй датчик 5926b. В некоторых формах дополнительные датчики могут быть включены для обнаружения грубого проксимального движения хирургического инструмента 5910.
ФИГ. 109 и 110 иллюстрируют одну форму выпрямляемого с помощью датчика концевого зажима 6002, переходящего из согнутого состояния в выпрямленное состояние во время извлечения из троакара 6058. На ФИГ. 109 выпрямляемый с помощью датчика концевой зажим 6002 находится в согнутой позиции относительно стержня 6031. Клиницист может извлечь выпрямляемый с помощью датчика концевой зажим 6002 через троакар 6058 в проксимальном направлении, как показано стрелкой 'A'. Проксимальное движение может быть обнаружено первым датчиком 6026а, вторым датчиком 6026b или и первым, и вторым датчиками 6026а, 6026b. Первый датчик 6026а может содержать акселерометр, сконструированный для обнаружения грубого проксимального движения стержня 6031. Второй датчик 6026b может содержать магнитный датчик сближения, сконструированный для определения изменения в магнитном поле между вторым датчиком 6026b и фиксированной точкой, такой как, например, троакар 6058. Троакар 6058 может содержать магнит 6022 для генерации магнитного поля. По мере того как стержень 6031 извлекается через троакар 6058, сила магнитного поля, обнаруженная магнитным датчиком 6026b, будет изменяться пропорционально расстоянию между магнитным датчиком 6026b и магнитом 6022. Первый датчик 6026а или второй датчик 6026b могут генерировать сигнал шарнирному контрольному двигателю 402 для активации процесса выпрямления выпрямляемого с помощью датчика концевого зажима 6002 относительно стержня 6831.
После завершения выпрямляющего процесса выпрямляемый с помощью датчика концевой зажим 6002 находится в выпрямленном состоянии, как показано на ФИГ. 110. В выпрямленном состоянии выпрямляемый с помощью датчика концевой зажим 6002 может быть извлечен через троакар 6058 без нанесения повреждений пациенту, троакару 6058, и без необходимости вручную выпрямлять выпрямляемый с помощью датчика концевой зажим 6002 для клинициста. В некоторых формах клиницист может скорректировать процесс выпрямления и удерживать выпрямляемый с помощью датчика концевой зажим 6002 в согнутом состоянии во время извлечения из троакара 6058.
ФИГ. 111 иллюстрирует одну форму магнитного кольца 6121, которое может быть соединено с троакаром 5858, 6058 или внешней трубке 5960. Магнитное кольцо 6121 может содержать множество магнитов 6122, которые могут генерировать магнитное поле. Магнитное поле может быть обнаружено магнитным датчиком, расположенным на хирургическом инструменте, таким как, например, второй датчик 6026b. Магнитный датчик 6026b может быть сконструирован для удержания выпрямляемого с помощью датчика концевого зажима, такого как концевой зажим 6002 в выпрямленном состоянии, когда магнитный датчик обнаруживает магнитное поле, генерированное магнитным кольцом 6121. Например, в одной форме, магнитный датчик 6026b может быть сконструирован для генерации блокирующего сигнала, который предупреждает сгибание концевого зажима, если магнитный датчик 6026b обнаруживает магнитное поле, превышающее предварительно заданное пороговое значение. Предварительно заданный порог может быть установлен на основании силы магнитного поля, генерированного магнитным кольцом 6121 на специфическом расстоянии, соответствующим шарнирной оси В-В, расположенной за пределами троакара 5858 или внешней трубки 5960. В некоторых формах магнитный датчик 6026b может активировать процесс выпрямления, когда обнаруженная сила магнитного поля превышает предварительно заданный порог, и может генерировать блокирующий сигнал для предотвращения сгибания выпрямляемого с помощью датчика концевого зажима 6002 до падения силы обнаруженного магнитного поля ниже предварительно заданного порога.
ФИГ. 112 и 113 иллюстрируют одну форму магнитного датчика 6226, содержащего герконовое реле. Герконовое реле может содержать электрический переключатель 6250 функционирующий под влиянием магнитного поля. Пара контактов может быть расположена на ферромагнитных металлических язычках в герметично запечатанной стеклянной оболочке. Контакты могут быть открытыми в нормальном состоянии, закрываясь в присутствии магнитного поля, или же в закрытыми в нормальном состоянии и открытыми при возникновении магнитного поля.
Теперь обратимся к ФИГ. 105 и 106, где раскрыт метод контроля выпрямляемого с помощью датчика концевого зажима. Хотя метод контроля выпрямляемого с помощью датчика концевого зажима описан в настоящем документе относительно ФИГ. 105 и 106, специалисты в данной области науки поймут, что метод может применяться с любой из форм выпрямляемого с помощью датчика концевого зажима, раскрытых в настоящем документе, таких как, например, формы, проиллюстрированные ФИГ. 107-113. В одной форме метод может содержать обнаружение, первым датчиком 5826а, грубого проксимального движения хирургического инструмента 5810. Хирургический инструмент 5810 может содержать выпрямляемый с помощью датчика концевой зажим 5802. Клиницист может согнуть выпрямляемый с помощью датчика концевой зажим 5802 во время работы. Когда обработка окончена, клиницист может начать выводить хирургический инструмент 5810 из пациента, перемещая хирургический инструмент 5810 в проксимальном направлении. Проксимальное движение хирургического инструмента 5810 может быть обнаружено первым датчиком 5826а. В некоторых формах первый датчик 5826а может содержать акселерометр, сконструированный для обнаружения грубого проксимального движения хирургического инструмента 5810. Метод может также содержать генерацию первым датчиком 5826а сигнала, указывающего на обнаружение грубого проксимального движения. Сигнал может быть передан первым датчиком 5826а контроллеру для шарнирного контрольного двигателя 402, такому как, например, контрольная схема, такая как контрольная схема 3702, показанная на ФИГ. 82. Дополнительные контроллеры двигателя представлены и описаны в соответствии с ФИГ. 84, 114-116, и т.д. Метод может также содержать получение, шарнирным контрольным двигателем 402, сигнала от первого датчика 5826а и активацию, шарнирным контрольным двигателем 402, процесса выпрямления для выпрямление угла сгиба выпрямляемого с помощью датчика концевого зажима 5802 в ответ на полученный сигнал. Процесс выпрямления может вернуть выпрямляемый с помощью датчика концевой зажим 5802 в состояние нулевого сгиба.
В некоторых формах метод может также содержать обнаружение, вторым датчиком 5826b, грубого проксимального движения хирургического инструмента 5810. В некоторых формах второй датчик 5826b может содержать магнитный датчик сближения, такой как, например, датчик эффекта Холла или герконовое реле. Второй датчик 5826b может быть сконструирован для определения расстояния между вторым датчиком 5826b и фиксированной точки, такой как троакар 5858 или внешняя трубка 5960. Метод для контроля выпрямляемого с помощью датчика концевого зажима 5802 может также содержать генерацию, вторым датчиком 5826b, сигнала, указывающего на обнаружение грубого проксимального движения. Второй сигнал может передаваться на шарнирный контрольный двигатель 402. Метод может также включать получение, шарнирным контрольным двигателем 402, второго сигнала и активацию, с помощью шарнирного контрольного двигателя 402, процесса выпрямления для выпрямления угла сгиба выпрямляемого с помощью датчика концевого зажима 5802. В некоторых формах второй датчик 5826b может генерировать второй сигнал, независимый от первого датчика 5826а.
В некоторых формах первый и второй датчики 5826аб 5826b могут функционировать как дополнительная проверка выпрямляющего процесса. Например, в некоторых формах и первый и второй датчики 5826а, 5826b могут передавать сигнал активации выпрямляющего процесса на шарнирный контрольный двигатель 402. Сигнал от либо первого датчика 5826а, либо второго датчика 5826b может заставить шарнирный контрольный двигатель 402 выпрямить выпрямляемый с помощью датчика концевой зажим 5802. В некоторых формах выпрямляющий процесс может не выполняться до получения обоих сигналов от первого и от второго датчиков 5826а, 5826b. В некоторых формах либо первый датчик 5826а, либо второй датчик 5826b могут независимо активировать выпрямляющий процесс, но процесс может быть прерван если сигнал не получен и от первого, и от второго датчиков 5826а, 5826b в пределах предварительно заданного временного лимита. Например, выпрямляющий процесс может быть инициирован сигналом от первого датчика 5826а. Если сигнал не получен от второго датчика 5826b в течение предварительно заданного временного лимита, выпрямляющий процесс может быть отменен хирургическим инструментом 5810.
В одной форме различные хирургические инструменты могут использовать модульную контрольную платформу двигателей. Например, модульная контрольная платформа может применяться контрольной схемой 3702. ФИГ. 114 показывает одно форму модульной контрольной платформы двигателей 6300, содержащую главный контроллер 6306, одну или несколько пар контроллеров двигателей 6309а-6309с. Платформа 6300 может контролировать один или несколько двигателей 6318а, 6318b, 6318с. Двигатели 6318а, 6318b, 6318с могут быть любыми двигателями которые применяются в хирургическом инструменте. Например, в некоторых формах один или несколько двигателей 6318а, 6318b, 6318с могут соответствовать одному или нескольким из шарнирного контрольного двигателя 402, пускового двигателя 530, двигателя вращения концевого зажима 560 и/или двигателя вращения стержня 610. В различных формах соответствующие контроллеры 6306, 6309a-6309c могут использоваться с применением одного или нескольких процессоров (например, процессоров, задействованных в контрольной схеме 3702). Модульная платформа контроля двигателей 6300 может быть пригодна для контроля хирургического инструмента, контролируемого двигателями, такого как, например, хирургический инструмент 10, показанный на ФИГ. 1 и 2. В различных формах, главный контроллер 6306 может размещаться на дистальной монтажной плате 810 или проксимальной монтажной плате 820. Первый контроллер двигателя 6314а функционально подсоединен к первому двигателя 6318а для подачи одного или нескольких контрольных сигналов на первый двигатель 6318а. Второй контроллер двигателя 6314b может быть функционально подключен ко второму двигателю 6318b и третий контроллер двигателя 6314с может быть функционально подключен к третьему двигателю 6318с. Контролеры двигателей 6314а-6314с находятся в электрическом соединении с главным контроллером 6306. Главный контроллер 6306 подает контрольные сигналы на контроллеры двигателей 6314а-6314с, основываясь на главном контрольном процессе для контролирования одной или нескольких функций концевого зажима 6302. Главный контрольный процесс может быть предварительно заданным процессом, процессом, определяемым пользователем, или процессом, генерированным устройством.
В одной форме главный контрольный процесс может определять одну или несколько хирургических процедур, которые способен выполнять хирургический инструмент 10, содержащий одну или несколько функций стержня 30 и концевого зажима 102. Например, в одной форме главный контрольный процесс может задавать режущие и сшивающие операции хирургического инструмента 10. Режущие и сшивающие операции могут содержать множество функций хирургического инструмента 10, таких как, например, функция зажатия, функция сжимания, функция сшивания, функция разреза и функция разжатия. Пользователь может отметить начало операции разрезания и сшивания любым пригодным способом, таким как, например, нажатие кнопки или переключателя на рукоятке 20. Специалистам в данной области будет понятно, что любой пригодный метод ввода может использоваться для активации одной или нескольких функций хирургического инструмента 10.
В одной форме, когда клиницист отмечает начало операции разрезания и сшивания, к примеру, нажатием кнопки на рукоятке 20, главный контроллер 6306 может генерировать серию контрольных сигналов и передать контрольные сигналы на один или несколько контроллеров 6314а-6314с. Например, в момент времени t0, может начаться операция разрезания и сшивания. Главный контроллер 6306 может генерировать первый сигнал, указывающий на необходимость выполнения сжимающей функции. Первый контрольный сигнал может быть передан на первый контроллер двигателя 6314а, соединенный с первым двигателем 6318а, сконструированный для контроля сжимающего движения концевого зажима 6302. Первый контроллер двигателя 6314а может, в свою очередь, предоставить один или несколько сигналов на первый двигатель 6318а, активирующий первый двигатель 6318а для поворота узла упорного элемента 190 концевого зажима 102 для сжимания ткани, расположенного между узлом упорного элемента 190 и картриджем 130. Главный контроллер 6306 может запрашивать первый контроллер двигателя 6314а о статусном сигнале до тех пор, пока первый контроллер двигателя 6314а не укажет на то, что операция сжатия окончена. В момент времени t1 первый контроллер двигателя 6314а может отправить сигнал главному контроллеру 6306, указывая на окончание выполнения сжимающей функции.
В момент времени t2, второй контрольный сигнал может быть передан от главного контроллера 6306, указывая на необходимость выполнения операции сшивания и разрезания. Второй контрольный сигал может быть отправлен на второй контроллер двигателя 6314b, соединенный со вторым двигателем 6318b. Второй двигатель 6318b может быть сконструирован для контроля проксимального и дистального движения режущей части 164 и/или салазок 170, расположенных в концевом зажиме 102. Сигнал контроля операции сшивания и разрезания дает команду второму контроллеру двигателя 6314b активировать второй двигатель 6318b для выдвижения режущей части 164 и/или салазок 170 в дистальном направлении, заставляя картридж со скобками 130 сработать и режущую часть 164 разрезать ткань, сжатую узлом упорного элемента 190, как описывалось более подробно выше. В момент времени t3 режущая часть 164 достигает наиболее дистальной точки и второй контроллер двигателя 6314b может отправить сигнал на главный контроллер 6306, указывающий на завершение операции сшивания и разрезания. Второй контроллер двигателя 6314b может автоматически генерировать контрольный сигнал для второго двигателя 6318b для обращения направления режущей части 164 до тех пор, пока режущая часть 164 не будет полностью извлечена.
После получения сигнала от второго контроллера двигателя 6314b в момент времени t3, главный контроллер 6306 может отправить третий контрольный сигнал на первый контроллер двигателя 6314а, указывая на необходимость выполнения функции высвобождения. Первый контроллер двигателя 6314а может генерировать контрольный сигнал для первого двигателя 6318а, заставляющий первый двигатель 6318а для обращения ранее выполненной операцией сжатия и разжать блок упорного элемента 190. Функция высвобождения может быть выполнена первым контроллером двигателя 6314а и первым двигателем 6318а одновременно с обратным движением второго двигателя 6318b для возвращения режущей порции 164 на стартовую позицию. Применение главного контроллера 6306 и индивидуальные контроллеры двигателей 6314а, 6314b позволяет хирургическому инструменту 10 выполнять многочисленные операции без перегрузки любого из индивидуальных контроллеров 6306, 6314а, 6314b.
Контроллеры двигателей 6314а-6314с могут содержать один или несколько независимых процессов для отслеживания и контроля хирургический операций, таких как, например, движение двигателя. В некоторых формах контроллеры двигателя 6314а-6314с могут быть сконструированы для управления одним или несколькими контрольными механизмами обратной связи. Например, в некоторых формах, контроллеры двигателей 6314а-6314с могут быть сконструированы как контроллеры замкнутого цикла, такие как контроллеры один-ввод-один-выход (SISO) или множественный-ввод-множественный-выход (MIMO). В некоторых формах контроллеры двигателя 6314а-6314с могут работать как пропорционально-интегрально-дифференциальные (PID) контроллеры. PID контроллер может управлять контрольным циклом, применяя три корректировочных показателя, пропорциональный показатель роста, интегральный показатель роста и дифференциальный термин роста. PID контроллер может содержать контрольный процесс, сконструированный для измерения указанной переменной и сравнить измеренное значение указанной переменной с ожидаемым значением указанной переменной или заданной точки указанной переменной. PID контроллер может регулировать контрольную переменную на основании разницы между измеренным значением и ожидаемым значением указанной переменной. В некоторый формах контроллеры двигателей 6314а-6314с может содержать PID контроллер скорости движения. Например, первый контроллер двигателя 6314а может измерять указанную переменную, такую как позиция 6314а. Первый контроллер двигателя 6314а может регулировать контрольную переменную, такую как скорость двигателя 6314а, на основании разница между измеренной позицией двигателя 6314а и заданной точкой или ожидаемой позицией двигателя 6314а.
В некоторых формах контроллеры двигателей 6314а-6314с может быть сконструированы как контроллеры обнаружения дефектов. Контроллер обнаружения дефектов может управлять процессом выявления дефектов. В некоторых формах контроллер обнаружения дефектов может управлять процессом распознавания дефектов прямой схемы, содержащий мониторинг одного или нескольких датчиков, сконструированный для прямого указания на дефект, которое можно называть обнаружением дефекта, основанным на обработке сигнала. В некоторых формах значение датчика, предоставленное датчиком, сравнивается с ожидаемым значением датчика, взятым из модели хирургического процесса, контролируемого контроллером обнаружения дефектов, что можно называть обнаружением дефекта, основанного на модели. Специалистом в данной области будет понятно, что комбинация обработки сигнала или основанного на модели обнаружения дефектов может быть использовано контроллером двигателя.
В некоторых формах контроллеры двигателей 6314а-6314с может быть сконструированы как контроллеры ограничения тока/силы. Контроллер ограничения тока/силы может быть сконструирован для ограничения измеряемого значения, такого как ток, поданный на двигатель или сила, развитая двигателем, до предварительно заданной значения. Например, в одной форме, первый контроллер двигателя 6314а может быть сконструирован для ограничения силы, развитой во время операции сжатия до предварительно заданного значения. Силовой датчик может отслеживать силу, предоставленную первым двигателем 6318а, сконструированного для контроля сжимающего действия хирургического инструмента. Когда значение силы, измеренное силовым датчиком, соответствует предварительно заданному значению, первый контроллер двигателя 6314а может прекратить действие первого двигателя 6318а. В некоторых формах контроллер двигателя 6314а-6314с может быть сконструирован для отслеживания тока, поданного на двигатель 6318а-6318с. Ток, задействованный двигателем 6318а-6318с, может указывать на одну или несколько функций двигателя 6318а-6318с, такие как скорость двигателя или сила, развитая двигателем во время хирургической операции. Если ток, задействованный двигателем 6318а-6318с, превышает предварительно заданное пороговое значение, контроллер двигателя 6314а-6314с может прекратить действие двигателя для предотвращения нанесения вреда пациенту и хирургическому инструменту.
В некоторых формах контроллеры двигателей 6314а-6314с могут предоставлять независимое подтверждение главного контрольного процесса, выполняемого главным контроллером 6306. Например, контроллеры двигателей 6314а-6314с могут подтверждать, что действие, запрошенные главным контроллером 6306, является валидным, до выполнение запрошенного действия. В некоторых формах контроллер двигателя 6314а-6314с может использовать информацию о состоянии для подтверждения валидности запрошенного действия. Например, в одной форме первый контроллер двигателя 6314а может получить инструкцию от главного контроллера 6306 для выполнения операции разрезания и сшивания. Первый контроллер двигателя 6314а может проверять текущее состояние хирургического инструмента, такого как, например, проверку, находится ли блок упорного элемента 190 в сжатой позиции. Если информация о состоянии соответствует валидному состоянию для выполнения операции разрезания и сшивания, первый контроллер двигателя 6314а может выполнить операцию разрезания и сшивания. Однако, если информация о состоянии не соответствует валидному состоянию для разрезания и сшивания, первый контроллер двигателя 6314а может указать на неполадку в главном контроллере 6306 или основном контрольном процессе. Специалисты в данной области поймут, что контроллеры двигателей 6314а-6314с могу содержать один или несколько контрольных процессов и один или несколько типов контрольного процесса.
ФИГ. 115 иллюстрирует одну из форм модульной платформы контроля двигателя 6400, содержащую главный контроллер 6406 и четыре пары двигатель-контроллер 6409а-6409d. Модульная платформа контроля двигателя 6400 может также использоваться контрольной схемой 3702, описанной выше в настоящем документе, например, используя один или несколько процессоров. Модульная контрольная платформа двигателя 6400 может быть сконструирована для контроля различных двигателей. Например, дистальный вращающий двигатель 6418а может работать в манере, аналогичной описанной в настоящем документе относительно двигателя вращения концевого зажима 560. Шарнирный двигатель 6418b может работать в манере, аналогичной описанной в настоящем документе относительно шарнирного двигателя 402. Проксимальный вращающий двигатель 6418c может работать в манере, аналогичной описанной в настоящем документе относительно двигателя вращения стержня 610. Режущий двигатель 6418d может работать в манере, аналогичной описанной в настоящем документе относительно пускового двигателя 530.
Главный контроллер 6406 может быть электрически соединен с одном или несколькими контроллерами двигателей 6414а-6414d. Главный контроллер 6406 может быть соединен с одном или несколькими контроллерами двигателей 6414а-6414d через проводное или беспроводное соединение. В некоторых формах двигатели 6418а-6418d могут содержать связанные декодеры двигателей 6416а-6416d, сконструированные для предоставления сигнала, указывающего на позицию стержня двигателя. В некоторых формах декодеры двигателей 6416а-6416d могу отсутствовать. В одной форме главный контроллер 6406 может быть сконструирован для коммуникации с любым количеством контроллеров двигателей 6414а-6414d, таким как, например, от одного до десяти контроллеров. В некоторых формах главный контроллер 6406 может быть сконструирован для коммуникации с одним или несколькими дополнительными периферийными контроллерами (не показаны), где периферийные контроллеры сконструированы для контроля одного или нескольких немоторизованных хирургических функций, таких как, например, ультразвуковые функции, электрохирургические функции, или любая другая подходящая функция хирургического инструмента.
В одной форме главный контроллер 6406 может синхронно коммуницировать с контроллерами двигателей 6414а-6414d. Коммуникации от главного контроллера 6406 может содержать, к примеру, предоставление инструкций для выполнения особых подпрограмм или функций контроллера двигателя 6414а-6414d, запрашивая у контроллеров двигателей 6414а-6414d обновление статуса и поучение информации обратной связи от контроллеров двигателей 6414а-6414d. Синхронная коммуникация может быть прямой коммуникацией между главным контроллером 6406 и контроллерами двигателей 6414а-6414d, где коммуникации синхронизированы во времени. Например, в форме, проиллюстрированной на ФИГ. 114, главный контроллер 6406 может коммуницировать с каждым из контроллеров двигателей 6414а-6414d во время предварительно заданных периодов времени. В другой форме между контроллерами двигателей 6414а-6414d может быть проведен маркер, позволяющий контроллерам двигателя 6414а-6414d, удерживающими в настоящий момент маркер, коммуницировать с главным контроллером 6406 во время предварительного заданного временного периода.
В одной форме главный контроллер 6406 может выполнять основной контрольный процесс. Основной контрольный процесс может отслеживать вводную информацию от пользователя, выполнять операции хирургического инструмента 10, предоставлять пользователю обратную связь или выполнять любые другие функции хирургического инструмента 10. Например, в одной форме главный контроллер 6406 может выполнять основной контрольный процесс, содержащий операцию разрезания и сшивания. В некоторых формах основной контрольный процесс может подавать контрольные сигналы на каждый из контроллеров двигателя 6414а-6414d. Выполнение индивидуальных функций каждого из двигателей 6418а-6418d может контролироваться контроллерами двигателей 6414а-6414d. В некоторых формах основной контрольный процесс может активировать или деактивировать один или несколько двигателей 6418а-6418d, основываясь на подсоединении или отсоединении модульного хирургического компонента, такого как модульный стержень 30 или рабочая часть 100. Главный контроллер 6406 может подавать контрольные сигналы контроллерам двигателей 6414а-6414d и может получать статусные сигналы от контроллеров двигателей 6414а-6414d. Статусные сигналы могут включать, к примеру, сигнал выполнения функции, сигнал о неполадке, сигнал ожидания или сигнал обратной связи.
В некоторых формах функциональный сигнал может указывать на операционный или завершенный статус функции, которую могут выполнять пары двигатель-контроллер 6409а-6409d. Например, сигнал функции может указывать, что операция сжимания выполняется или была выполнена. Сигнал функции также может указывать на успех операции, например, указывать на количество силы, приложенной сжатой тканью во время операции сжимания. Контроллер двигателя 6414а-6414d может генерировать сигнал о неполадке если контроллер двигателя 6414а-6414d обнаруживает ошибку в связанном двигателе 6418а-6418d или в выполнении хирургической операции. Сигнал о неполадке может заставить главный контроллер 6406 генерировать сигнал о неполадке оператору, такой как, например, визуальный индикатор или звуковой индикатор. Сигнал о неполадке может также заставить главный контроллер 6406 для отправки контрольных сигналов на контроллеры двигателей 6414а-6414d для остановки любой выполняемой в данный момент функций.
Сигнал ожидания может быть передан контроллерами двигателей 6414а-6414d на главный контроллер 6406 для указания, что связанный двигатель 6418а-6418d находится в состоянии ожидания и может быть использован для выполнения связанной с ним функции хирургического инструмента 10. В одной форме сигнал ожидания может указывать, что функция была выполнена двигателем 6418а-6418d. Например, в одной форме первый контроллер двигателя 6414а может получить контрольный сигнал от главного контроллера 6406 для выполнения операции сжатия. Первый контроллер двигателя 6414а может преобразовать контрольный сигнал от главного контроллера 6406 в один или несколько контрольных сигналов для двигателя 6418а. Когда двигатель 6418а выполнил указанную функцию, контроллер двигателя 6414а может переда сигнал ожидания на главный контроллер 6406, указывая, что двигатель 6418а выполнил затребованную функцию.
В различных формах сигнал обратной связи может быть передан контроллерами двигателей 6414а-6414d на главный контроллер 6406. Главный контроллер 6406 может иметь одно или несколько связанных с ним устройств обратной связи (не показаны) для предоставления обратной связи оператору. Сигналы обратной связи, полученные от контроллеров двигателей 6414а-6414d, могут быть преобразованы в контрольные сигналы для устройств обратной связи с помощью главного контроллера 6406. В некоторых формах контроллеры двигателей 6414а-6414d могут передавать сигналы обратной связи напрямую на устройство обратной связи.
В некоторых формах синхронная коммуникация между главным контроллером 6406 и контроллеров двигателей 6414а-6414d может быть прервана перекрывающим сигналом. Перекрывающий сигнал может заставить главный контроллер 6406 прервать синхронную коммуникацию и коммуницировать с контроллером двигателя 6414а, генерируя перекрывающий сигнал. В различных формах перекрывающий сигнал может быть генерирован контроллером двигателя 6414а как результат неполадки двигателя, входящего сигнала от пользователя, или основанного на предварительно заданном пороге в одном или нескольких сигналах обратной связи. Перекрывающий сигнал может заставить главный контроллер 6406 отправить сигнал на каждый из контроллеров двигателя 6414а-6414d прервать все действия двигателей 6418а-6418d до тех пор, пока условие, которое привело к генерации перекрывающего сигнала, не будет ликвидировано. В одной форме главный контроллер 6406 может генерировать сигнал для одного из устройств обратной связи для сообщения оператору о перекрывающем сигнале.
ФИГ. 116 иллюстрирует одну из форм модульной контрольной платформы двигателя с двойным контроллером 6500. Платформа 6500 может также использоваться контрольной схемой 3702, как описано в настоящем документе. Модульная контрольная платформа двигателя с двойным контроллером 6500 содержит главный контроллер 6506, второстепенный контроллер 6507 и четыре пары двигатель-контроллер 6509а-6509d. Модульная контрольная платформа двигателя 6400 может быть сконструирована для контроля двигателей 6518а, 6518b, 6518c, 6518d. Например, дистальный вращающий двигатель 6518а может работать в манере, аналогичной описанной в настоящем документе относительно двигателя вращения концевого зажима 560. Шарнирный двигатель 6518b может работать в манере, аналогичной описанной в настоящем документе относительно шарнирного двигателя 402. Проксимальный вращающий двигатель 6518c может работать в манере, аналогичной описанной в настоящем документе относительно двигателя вращения стержня 610. Режущий двигатель 6518d может работать в манере, аналогичной описанной в настоящем документе относительно пускового двигателя 530.
Модульная платформа контроля двигателя 6400 может быть сконструирована для контроля шарнирного двигателя 402, пускового двигателя 530, двигателя вращения концевого зажима или «дистального вращающего» двигателя 560 и двигателя вращения стержня или «проксимального вращающего» двигателя 610. И главный контроллер 6506, и второстепенный контроллер 6507 могут быть связаны с субкомплектом доступных контроллеров двигателей. Например, в проиллюстрированной форме, главный контроллер 6506 связан с первым и вторым контроллерами двигателей 6526а-6526b, и второстепенный контроллер 6507 связан с третьим и четвертым контроллерами двигателей 6526с-6526d. Главный контроллер 6506 и второстепенный контроллер 6507 могут находиться в электрической коммуникации. В некоторых формах, второстепенный контроллер 6507 может размещаться на дистальной монтажной плате 810 или проксимальной монтажной плате 820. Второстепенный контроллер 6507 может снизить нагрузку на главный контроллер 6506 путем снижения количества контроллеров двигателей 6526а-6526d, с которыми главный контроллер 6506 должен коммуницировать и контролировать их. Главный контроллер 6506 и второстепенный контроллер 6507 могут получать один или несколько контрольных вводов 6508.
В одной форме главный контроллер 6506 может подавать контрольные сигналы напрямую первому контроллеру двигателя 6526а и второму контроллеру двигателя 6526b. Главный контроллер 6506 может также передавать контрольные сигналы на второстепенный контроллер 6507. Второстепенный контроллер может передавать контрольные сигналы на третий контроллер двигателя 6526с и четвертый контроллер двигателя 6526d. Путем снижения количества контроллеров двигателя 6526а-6526d, которые главный контроллер 6506 должен запрашивать и контролировать модульная платформа контроля двигателя с двойным контроллером 6500 может увеличить время ответа или переадресовать дополнительную процессуальную нагрузку главного контроллера 6506 на другие задачи. В одной форме главный контроллер 6506 может осуществлять главный контрольный процесс, и второстепенный контроллер 6507 может осуществлять второстепенный контрольный процесс для генерации одного или нескольких сигналов для контроллеров двигателей 6526а-6526d, основанных на вводной информации от главного контроллера 6506. В одной форме второстепенный контроллер 6507 может получать контрольные входящие сигналы от одного или нескольких пользовательских контролирующих устройств, таких как, например, кнопка сжатия или пусковой переключатель. В одной форме главный контроллер 6506 может связываться с одним или несколькими второстепенными контроллерами 6507 и может не передавать каких-либо контрольных сигналов напрямую контроллерам двигателей 6526а-6526d.
В одной форме дополнительные второстепенные контроллеры 6507 могут быть добавлены к системе для контроля дополнительных контроллеров двигателей или хирургических модулей. В одной форме второстепенный контроллер 6507 может использоваться только при необходимости предварительно заданного порога контроллеров двигателей. Например, в форме, показанной на ФИГ. 115, четыре контроллера двигателей 6526а-6526d соединены с модульно платформой контроля двигателя с двойным контроллером 6500. И главный контроллер 6506, и второстепенный контроллер 6507 могут быть связаны с двумя контроллерами двигателей 6526а-6526d. Деактивация одного или нескольких двигателей, например, путем замены стержня 30 другим стержнем, требующим только двух двигателей для шарнирного сгибания, может привести к деактивации второстепенного контроллера 6507, поскольку дополнительная обрабатывающая энергия второстепенного контроллера 6507 не требуется для снижения процессуальной нагрузки главного контроллера 6506. В некоторых формах деактивация одного или нескольких контроллеров двигателей 6526а-6526d может привести к назначению оставшихся контроллеров двигателей к ожидающему второстепенному контроллеру 6507. Например, деактивация третьего и четвертого двигателей 6518с, 6518d приведет к переходу второстепенного контроля 6507 в режим ожидания. Второй контроллер двигателя 6526b может быть отсоединен от главного контроллера 6506 и подсоединен к второстепенному контроллеру 6507 для уменьшения процессуальной нагрузки на главный контроллер 6506. Один или несколько уравновешивающих нагрузку процессов могут осуществляться как часть основного контрольного процесса для того, чтобы удостовериться в оптимальном распределении контроля между главным контроллером 6506 и одним или несколькими второстепенными контроллерами 6507.
Возвращаясь к ФИГ. 114-116, можно раскрыть метод контроля модульного хирургического инструмента 10, содержащего множество контроллеров двигателей. Хотя метод для контроля модульного хирургического инструмента 10 обсуждается в связи с ФИГ. 114-116, специалисты в данной области поймут, что метод может быть применен с учетом любого варианта осуществления хирургического инструмента или различных контрольных платформ, описанных в настоящем документе. Метод может содержать генерирование главным контроллером 6506 главного контрольного процесса, содержащего один или несколько контрольных сигналов. Метод может также содержать передачу, от главного контроллера 6506 к одному или нескольким двигателям 6526а-6526d, генерированных контрольных сигналов. Контроллеры двигателей 6526а-6526d могут получать переданные контрольные сигналы. В некоторых формах субкомплект контрольных сигналов, полученных первым контроллером двигателя 6526а, может содержать контрольные сигналы, переданные главным контроллером 6506 во время определенного периода времени, в который главный контроллер 6506 и первый контроллер двигателя 6526 находятся в синхронной коммуникации. Метод может также содержать контролирование, с помощью контроллеров двигателей 6526а-6526d, одного или нескольких связанных с ними двигателей 6518а-6518d, основанное на контрольных сигналах, полученных от главного контроллера 6506.
В некоторых формах метод может содержать передачу, с помощью главного контроллера 6506, одного или нескольких контрольных сигналов на второстепенный контроллер 6507. Второстепенный контроллер 6507 может быть электрически соединен с одном или несколькими контроллерами двигателей 6526с-6526d. Второстепенный контроллер 6507 может осуществлять второстепенный контрольный процесс, содержащий генерирование одного или нескольких сигналов контроля двигателя, основанных на вводных данных, полученных от главного контроллера 6506. Второстепенный контрольный процесс может также содержать передачу, второстепенным контроллером 6507, сигналов контроля двигателя одному или нескольким электрически подсоединенным контроллерам двигателя 6526с-6526d. Метод может также содержать контролирование, с помощью контроллеров двигателей 6526с-6526d, одного или нескольких связанных с ними двигателей в ответ на полученные сигналы контроля двигателей. В различных формах субкомплект генерированных сигналов контроля двигателя может быть синхронно переда на каждый из контроллеров двигателей 6526с-6526d на протяжении предварительно заданного периода времени.
ФИГ. 117 иллюстрирует одну форму главного контрольного процесса 6600, который может быть осуществлен главным контроллером, таким как, например, главные контроллеры, показанные на ФИГ. 114-116, или любой другой пригодный главный контроллер. В одной форме хирургический инструмент 10 может содержать четыре двигателя, таких как, например, шарнирный двигатель 402, пусковой двигатель 530, двигатель вращения концевого зажима или «дистальный вращающий» двигатель 560, и двигатель вращения стержня или «проксимальный вращающий» двигатель 610 и рычажный переключатель 842. Хирургический инструмент 10 может быть сконструирован для выполнения функции дистального вращения, сжимающий функции и пусковой функции. Хирургический инструмент 10 может содержать одну или несколько кнопок для контролирования различных операций хирургического инструмента 10, таких как, например, кнопка возврата, кнопка разгрузки, кнопка захвата, кнопка сжатия, или кнопка запуска. Хирургический инструмент 10 может также содержать светодиод (LED) для предоставления визуальной обратной связи, касающейся действий хирургического инструмента 10, пользователю.
В некоторых формах, когда хирургический инструмент 10 активирован, главный контроллер 6406 вводит устройство в режим по умолчанию. В иллюстрированной главном контрольном процессе 6600 режимом по умолчанию является шарнирное состояние 6602. Шарнирное состояние 6602 может включать активацию трех или четырех доступных двигателей. Активированные двигателя могут контролировать вращения стержня 30 (например, двигатель вращения стержня 610), концевого зажима 102 (например, двигатель вращения концевого зажима 560), и/или шарнирный изгиб концевого зажима 102 (например, шарнирный двигатель 410). В шарнирном режиме по умолчанию рычажный переключатель 842 может быть активным. В шарнирном режиме 6602 рычажный переключатель 842 может применяться для контроля шарнирного сгиба или вращения стержня 30 и концевого зажима 102. Функция дистального вращения может быть активной (или доступной), в том время как функции захвата, сжатия и пуска недоступны. Кнопка возврата также может быть активирована в режиме по умолчанию. LED должен быть зеленым для указания, что хирургический инструмент 10 находится в состоянии, при котором хирургический инструмент 10 может безопасно перемещаться.
Пользователь может нажать кнопку возврата 6604, заставляя хирургический инструмент 10 вернуться в исходное состояние 6606, например, стартовое состояние, в котором концевой зажим 102 выпрямлен относительно стержня 30 и стержень 30 и концевой зажим 102 возвращены в состояние нулевого вращения. Исходное состояние 6606 может быть полезно при переходе от одной операции к другой или может позволить пользователю быстро переориентировать хирургический инструмент 10 во время операции. Когда исходное состояние 6606 достигнуто, главный контрольный процесс 6600 может вернуть 6605 в шарнирное состояние по умолчанию 6602.
В одной форме концевой зажим 102, проиллюстрированный на ФИГ. 1 и 2 может быть обратимо подсоединен к стержню 30 для возможности подсоединения различных рабочих частей к стержню 30. Стержень 30 может быть обратимо подсоединен к рукоятке 20 для возможности подсоединения различных стержней к хирургическому инструменту 10. В одной форме главный контроллер 6406 может реагировать на выталкивание 6608 концевого зажима 102 или стержня 30 из хирургического инструмента 10, и может приостановить работу хирургического инструмента 10 до тех пор пока новый стержень или рабочая часть не будет подсоединена к хирургическому инструменту 10 и хирургический инструмент 10 не вернется в исходное состояние 6606. После того, как главный контрольный процесс 6600 обнаружил новый концевой зажим 102 и вернулся в исходное состояние 6606, главный контрольный процесс 6600 может войти в режим по умолчанию 6602.
В одной форме хирургический инструмент 10 может иметь присоединенный концевой зажим 102. Концевой зажим 102 может быть сконструирован для выполнения функции захвата. Функция захвата может содержать захват области ткани между узлом упорного элемента 190 и картриджем 130 концевого зажима 102. Хирургический инструмент 10 может содержать кнопку захвата для активации функции захвата. Когда пользователь нажимает 6614 кнопку захвата, хирургический инструмент 10 может войти в режим захвата 6616, блокируя движение концевого зажима 102, такое как вращение или шарнирный сгиб относительно стержня 30. Режим захвата 6616 может активировать четвертый двигатель (например, пусковой двигатель 530), чтобы заставить часть концевого зажима 102 захватить секцию ткани, например, путем перемещения узла упорного элемента 190 из открытой позиции к закрытую позицию. Кнопка зажима может быть активирована, когда хирургический инструмент 10 входит в режим зажима.
В некоторых формах клиницист может нажать 6620 кнопку зажима, заставляя хирургический инструмент 10 войти в режим зажима 6622. В режиме сжатия 6622 хирургический инструмент 10 может заблокировать четвертый двигатель для предупреждения высвобождения секции ткани во время последующей операции. Режим сжатия 6622 может активировать кнопку пуска, расположенную на рукоятке 20. Когда хирургический инструмент 10 вошел в режим сжатия 6622, главный контроллер 6406 может изменить LED на синий для указания клиницисту о том, что ткань сжата узлом упорного элемента 190 и что хирургический инструмент 10 может быть запущен для осуществления операции сшивания и разрезания.
Клиницист может нажать 6626 кнопку пуска, заставляя хирургический инструмент 10 войти в режим запуска 6628. В режиме запуска 6628 хирургический инструмент 10 может деактивировать двигатели, сконструированные для контроля движения хирургического инструмента 10, такие как, например, двигатель 1-3. Режим запуска 6628 может активировать четвертый двигатель, который может быть сконструирован для контроля операции сшивания и разрезания, как описано выше. Кнопка пуска может удерживаться в нажатом состоянии, заставляя главный контроллер 6406 генерировать контрольные сигналы для контроллера двигателя, связанного с четвертым двигателем, для активации операции сшивания и разрезания, заставляя режущую часть 164 и/или салазки 170 выдвигаться внутрь картриджа 130, расположенного в концевом зажиме 102. Во время пуска главный контроллер 6406 может установить LED на красный цвет для сообщения клиницисту, что хирургический инструмент 10 запущен. «Ярлык запуска» может быть установлен на значение «истина» главным контроллером 6406, указывая, что хирургический инструмент был запущен и моет не запускаться снова. Главный контроллер 6406 или контроллер двигателя, связанный с четвертым двигателем, может автоматически извлекать режущую часть 164, когда режущая часть 164 достигла дистального конца концевого зажима 102. Когда режущая часть 164 закончила обратное движение и вернулась на исходную позицию, главный контрольный процесс 6600 может вернуться 6630 в состояние сжатия 6622.
Клиницист может деактивировать 6624 состояние сжатия 6622 путем нажатия на кнопку сжатия. Главный контрольный процесс 6600 будет генерировать один или несколько сигналов для возвращения в состояние захвата 6616, когда состояние сжатия 6622 деактивируется. Клиницист может затем вывести 6618 прибор из режима захвата 6616 и перевести в шарнирный режима 6602 или любое другое пригодное состояние по умолчанию. Специалисты в данной области поймут, что главный контрольный процесс 6600 может быть модифицирован для обеспечения любой хирургической операции или функции, которую может осуществить хирургический инструмент 10 или любой подсоединенный хирургический модуль. В некоторых формах главный контрольный процесс 6600 может быть автоматически сконструирован на основании присоединенных стержней, концевых зажимов или модулей питания.
В соответствии с одной общей формой, представлен хирургический инструмент, включающий блок рукоятки, который сконструирован для одновременной и независимой электрической генерации по меньшей мере двух дискретных вращательных контрольных движений. Хирургический инструмент может также включать блок удлиненного стержня, который функционально взаимодействует с узлом рукоятки для независимого и одновременного получения и передачи по меньшей мере двух дискретных вращательных контрольных движений на концевой зажим, подсоединенный к блоку удлиненного стержня.
В соответствии с другой общей формой, представлен хирургический инструмент, включающий блок рукоятки, который сконструирован для одновременной и независимой электрической генерации по меньшей мере трех дискретных вращательных контрольных движений. Хирургический инструмент может также включать блок удлиненного стержня, который функционально взаимодействует с узлом рукоятки для независимого и одновременного получения и передачи по меньшей мере трех дискретных вращательных контрольных движений на концевой зажим, подсоединенный к блоку удлиненного стержня.
В соответствии с другой общей формой, представлен хирургический инструмент, включающий приводную систему, которая сконструирована для электрической генерации множества дискретных вращательных контрольных движений. Хирургический инструмент может также включать блок удлиненного стержня, который функционально подсоединен к приводной системе для получения от нее первого вращательного контрольного движения для вращения узла удлиненного стержня вокруг оси стержня. Блок удлиненного стержня может быть сконструирован для получения и передачи второго вращательного контрольного движения от приводной системе к хирургическому концевому зажиму, который функционально подсоединен к блоку удлиненного стержня, чтобы заставить хирургической концевой зажим вращаться вокруг оси стержня относительно узла удлиненного стержня. Блок удлиненного стержня может быть также сконструирован для приема или передачи третьего вращательного контрольного движения от приводной системы к шарнирному соединению, которое связано с узлом удлиненного стержня и хирургическом концевым зажимом для сгибания хирургического концевого зажима вокруг шарнирной оси, которая по существу перпендикулярна оси стержня.
В соответствии с еще одной общей формой представлено шарнирное соединение для хирургического инструмента, которое включает блок удлиненного стержня и приводную систему, которая сконструирована для генерирования и приложения множества вращательных контрольных движений на блок удлиненного стержня. По меньшей мере в одной форме шарнирное соединение содержит проксимальную соединительную часть, которая подсоединена к блоку удлиненного стержня и дистальную соединительную часть, которая подвижно соединена с проксимальной соединительной частью и сконструирована для взаимодействия с хирургическим концевым зажимом. Первая система шестерней может функционально взаимодействовать с проксимальной частью пускового стержня узла удлиненного стержня. Дистальный пусковой стержень может функционально взаимодействовать с хирургическим концевым зажимом для передачи вращательного пускового движения от проксимального пускового стержня на хирургический концевой зажим одновременно делая более удобным шарнирное сгибание дистальной соединительной части относительно проксимальной соединительной части. Вторая система шестерней может функционально взаимодействовать с проксимальной частью вращающегося стержня узла удлиненного стержня для передачи дистального вращательного контрольного движения на концевой зажим, чтобы заставить хирургический концевой зажим вращаться относительно узла удлиненного стержня одновременно делая более удобным шарнирное сгибание дистальной соединительной части относительно проксимальной соединительной части.
В соответствии с еще одной общей формой представлено шарнирное соединение для хирургического инструмента, в котором есть блок удлиненного стержня и приводная система, которая сконструирована для генерирования и приложения множества вращательных контрольных движений на блок удлиненного стержня. По меньшей мере в одной форме шарнирное соединение включает проксимальную скобу, которая подсоединена к блоку удлиненного стержня, и дистальную скобу, которая закреплена штифтом с возможностью поворота на проксимальной скобе для избирательного поворотного перемещения там относительно шарнирной оси, которая по существу перпендикулярная оси стержня, которая задана узлом удлиненного стержня. Первая система шестерней может поддерживаться в области шестерней, расположенной между проксимальной и дистальной скобками, так что ни одна часть первой системы шестерней не выступает радиально наружу за пределы любой части шарнирного соединения. Первая система шестерней может функционально взаимодействовать с проксимальной частью пускового стержня узла удлиненного стержня. Дистальный пусковой стержень может функционально взаимодействовать с хирургическим концевым зажимом для передачи вращательного пускового движения от проксимального пускового стержня на хирургический концевой зажим одновременно делая более удобным поворотное перемещение дистальной скобы относительно проксимальной скобы. Вторая система шестерней может поддерживаться в области шестерней, так что ни одна часть первой системы шестерней не выступает радиально наружу за пределы любой части шарнирного соединения. Вторая система шестерней может функционально взаимодействовать с проксимальной частью вращающегося стержня узла удлиненного стержня для передачи дистального вращательного контрольного движения на концевой зажим, чтобы заставить хирургический концевой зажим вращаться относительно узла удлиненного стержня одновременно делая более удобным шарнирное сгибание дистальной скобы относительно проксимальной скобы.
В соответствии с другой общей формой, представлен хирургический инструмент, включающий приводную систему, которая сконструирована для генерации множества вращательных контрольных движений. Блок удлиненного стержня функционально взаимодействует с приводной системой и может содержать внешний сегмент стержня, который функционально взаимодействует с приводной системой для получения от нее дистальных вращательных контрольных движений. Шарнирный стержень может функционально взаимодействовать с приводной системой для получения от нее вращательных шарнирных движений Блок удлиненного стержня может также включать проксимальный сегмент пускового стержня, который функционально взаимодействует с приводной системой для получения от нее вращательных пусковых движений, Хирургический инструмент может также включать шарнирное соединение, которое может включать проксимальную скобу, которая подсоединена к блоку удлиненного стержня, и дистальную скобу, которая закреплена штифтом с возможностью поворота на проксимальной скобе для избирательного поворотного перемещения там относительно шарнирной оси, которая по существу перпендикулярная оси стержня, заданной узлом удлиненного стержня. Блок соединительной муфты может вращательно взаимодействовать с дистальной скобой и быть сконструированной для подсоединения к хирургическому концевому зажиму. Дистальный сегмент пускового стержня может функционально поддерживаться узлом соединительной муфты и быть сконструированным для взаимодействия с частью приводного стержня хирургического концевого зажима. Первая система шестерней может функционально взаимодействовать с проксимальным сегментом пускового стержня и дистальным сегментом пускового стержня для передачи вращательных пусковых движений от проксимального сегмента пускового стержня к дистальному сегменту пускового стержня, одновременно позволяя дистальной скобе избирательно поворачиваться относительно проксимальной скобы. Вторая система шестерней может функционально взаимодействовать с проксимальным вращающимся стержнем для передачи дистальных вращательных контрольных движений к блоку соединительной муфты, одновременно позволяя дистальной скобе избирательно поворачиваться относительно проксимальной скобы. Звено шарнирного привода может взаимодействовать с шарнирным стержнем и дистальной скобой и быть ограниченным в осевых движениях относительно шарнирного соединения в ответ на приложение вращательных шарнирных движений к шарнирному стержню.
В соответствии с еще одной общей формой, представлена крышка для шарнирного соединения, которая поддерживается в блоке удлиненного стержня хирургического инструмента, который функционально соединен с хирургическим концевым зажимом, у которое есть по меньшей мере один проводник концевого зажима. По меньшей мере в одной форме крышка содержит не проводящий электричество полый корпус, у которого есть открытый дистальный конец и открытый проксимальный конец и проход для приема соединения, который проходит между ними для приема шарнирного соединения. Полый корпус сконструирован для разрешения частям шарнирного соединения избирательно сгибаться относительно друг друга, одновременно по существу закрывая части внутри полого корпуса. По меньшей мере одна проводящая электричество магистраль проходит от дистального конца полого корпуса к проксимальному концу полого корпуса. Каждая из по меньшей мере одной электропроводящей магистралей имеет дистальную концевую часть, которая сконструирована для электрического контакта с соответствующим проводником концевого зажима, когда концевой зажим подсоединен к блоку удлиненного стержня, и проксимальную концевую часть, которая сконструирована для электрического контакта с соответствующим проводником стержня в блоке удлиненного стержня.
В соответствии с другой общей формой, представлен хирургический инструмент, который включает блок удлиненного стержня, в котором есть по меньшей мере один электрический проводник стержня и шарнирное соединение. По меньшей мере в одной форме шарнирное соединение включает проксимальную часть шарнирного соединения, подсоединенную к блоку удлиненного стержня. Дистальная часть соединения подвижно соединена с проксимальной части соединения для селективного шарнирного движения относительно этой части. Блок соединительной муфты соединен с возможностью вращения с дистальной частью шарнирного соединения для избирательного вращения относительно этой части. Блок соединительной муфты может быть сконструирован для обратимого соединения с хирургическим концевым зажимом и формирования электропроводящей соединительной магистрали от проводника концевого зажима к шарнирному соединению. Хирургический инструмент может также включать проводник шарнирного соединения, который содержит проводящую соединительную магистраль, и проходит сквозь шарнирное соединение для контакта с соответствующим проводником стержня для формирования электропроводящей магистрали между ними.
В соответствии с другой общей формой, представлен хирургический инструмент, включающий контрольную систему, которая содержит по меньшей мере один электрический контрольный компонент. Хирургический инструмент также включает блок удлиненного стержня, который имеет электрический проводник стержня, который функционально связывается по меньшей мере с одним электрическим контрольным компонентом. Хирургический инструмент может также включать шарнирное соединение, которое включает проксимальную скобу, подсоединенную к блоку удлиненного стержня. Дистальная скоба подсоединена с возможностью поворота к проксимальной скобе с возможностью избирательного относительного поворотного движения. Хирургический инструмент может также включать блок соединительной муфты, который соединен с дистальной скобой, и хирургический концевой зажим, который обратимо соединен к блоку соединительной муфты. Хирургический концевой зажим может включать проводник концевого зажима, который приспособлен для электрического контакта с электропроводящей соединительной магистрали, сформированной в блоке соединительной муфты, когда хирургический концевой зажим подсоединен к блоку соединительной муфты. Проводник шарнирного соединения может проходить сквозь шарнирное соединение и находиться в электрическом контакте с проводящей магистралью через блок соединительной муфты и проводника стержня.
В соответствии с еще одной общей формой, представлен хирургический инструмент, который включает блок рукоятки, к которому функционально подсоединен блок удлиненного стержня, сконструированный для функционального соединения с хирургическим концевым зажимом. Двигатель поддерживается узлом рукоятки и сконструирован для приложения вращательного движения либо к удлиненному стержню, либо к хирургическому концевому зажиму, подсоединенному к нему. Блок дискового контроля функционально поддерживается на блоке рукоятки и связывается с двигателем таким образом, что когда активирующая часть узла дискового контроля поворачивается в первом направлении, двигатель прилагает вращательное движение к блоку удлиненного стержня или концевому зажиму в первом направлении, и когда активирующая часть поворачивается во втором направлении, двигатель прилагает вращательное движение к блоку удлиненного стержня или концевому зажиму во втором направлении.
В соответствии с еще одной общей формой, представлен хирургический инструмент, который включает блок рукоятки, в котором есть блок удлиненного стержня, подсоединенный к нему с возможность вращения и сконструированный для функционального соединения с хирургическим концевым зажимом. Двигатель поддерживается узлом рукоятки и сконструирован для приложения вращательного движения либо к блоку удлиненного стержня для избирательного вращения вокруг оси стержня. Хирургический инструмент также включает блок дискового контроля, который включает дисковый активирующий элемент, который поддерживается с возможностью поворота относительно узла рукоятки. Первый магнит поддерживается на дисковом активирующем элементе, и второй магнит поддерживается на дисковом активирующем элементе. Стационарный датчик расположен по центру между первым и вторым магнитами, когда дисковый активирующий элемент находится в неактивированной позиции. Стационарный датчик связывается с двигателем таким образом, что когда активирующая часть дискового контроля поворачивается в первом направлении, двигатель прилагает вращательное движение к блоку удлиненного стержня в первом направлении, и когда активирующая часть поворачивается во втором направлении, двигатель прилагает вращательное движение к блоку удлиненного стержня во втором направлении.
В соответствии с еще одной общей формой, представлен хирургический инструмент, который включает блок рукоятки, к которому функционально подсоединен блок удлиненного стержня, сконструированный для функционального соединения с хирургическим концевым зажимом таким образом, что концевой зажим может избирательно вращаться вокруг оси стержня относительно узла удлиненного стержня. Двигатель поддерживается узлом рукоятки и сконструирован для приложения вращательного движения к концевому зажиму или соединительной части узла удлиненного стержня, к которому подсоединен концевой зажим для избирательного вращения вокруг оси стержня. Хирургический инструмент также включает блок дискового контроля, который включает дисковый активирующий элемент, который поддерживается с возможностью поворота относительно узла рукоятки. Первый и второй магниты поддерживаются на активирующем дисковом элементе. Стационарный датчик расположен по центру между первым и вторым магнитами, когда дисковый активирующий элемент находится в неактивированной позиции. Стационарный датчик связывается с двигателем таким образом, что когда активирующий дисковый элемент поворачивается в первом направлении, двигатель прилагает вращательное движение к концевому зажиму или соединительной части в первом направлении, и когда активирующий дисковый элемент поворачивается во втором направлении, двигатель прилагает вращательное движение к концевому зажиму или соединительной части во втором направлении.
В соответствии с другой общей формой, представлен хирургический инструмент, включающий корпус, в котором размещается множество двигателей. Хирургический инструмент также включает блок контрольного рычажного переключателя, который включает блок первого переключателя, подвижно поддерживающийся корпусом, и включает рычажный переключатель, который подвижно размещен там же таким образом, что поворотное движение рычажного переключателя относительно узла первого переключателя заставляет по меньшей мере один соответствующий контрольный сигнал отправляться на по меньшей мере один из двигателей, соединенных с ним. Блок рычажного переключателя также включает блок второго переключателя, который содержит первый датчик и второй датчик, способные перемещаться с узлом первого переключателя таким образом, что движение второго датчика относительно первого датчика заставляет по меньшей мере еще один контрольный сигнал отправляться на другой из двигателей, подсоединенных к нему.
В соответствии с другой общей формой, представлен хирургический инструмент, который включает блок рукоятки и имеет блок удлиненного стержня, соединенный с ней с возможностью вращения. Проксимальный вращающийся двигатель поддерживается узлом рукоятки и сконструирован для приложения проксимальный вращательных движений к блоку удлиненного стержня, с целью заставить блок удлиненного стержня вращаться относительно узла рукоятки вокруг оси стержня. Хирургический концевой зажим функционально связан с узлом удлиненного стержня и сконструирован для выполнения хирургический процедуры при приложении к нему по меньшей мере одного пускового движения. Пусковой двигатель поддерживается узлом рукоятки и сконструирован для приложения пусковых движений к части узла удлиненного стержня для передачи на хирургический концевой зажим. Хирургический инструмент также содержит блок контрольного рычажного переключателя, который включает блок первого переключателя, подвижно поддерживающийся узлом рукоятки корпусом, и включает рычажный переключатель, который подвижно размещен там же таким образом, что поворотное движение рычажного переключателя относительно узла первого переключателя заставляет по меньшей мере один соответствующий контрольный сигнал отправляться на проксимальный вращающийся двигатель. Блок рычажного переключателя также включает блок второго переключателя, который содержит первый датчик и второй датчик, способные перемещаться с узлом первого переключателя таким образом, что движение второго датчика относительно первого датчика заставляет по меньшей мере еще один контрольный сигнал отправляться на пусковой двигатель.
В соответствии с другой общей формой, представлен хирургический инструмент, который включает блок рукоятки и имеет блок удлиненного стержня, соединенный с ней с возможностью вращения. Хирургический инструмент также включает шарнирное соединение, которое содержит проксимальную соединительную часть, которая подсоединена к блоку удлиненного стержня, и дистальную соединительную часть, которая подвижно соединена с проксимальной соединительной частью. Шарнирный двигатель поддерживается узлом рукоятки и сконструирован для приложения шарнирных движений к шарнирному соединению для принуждения дистальной соединительной части перемещаться относительно проксимальной соединительной частью. Хирургический концевой зажим функционально связан с узлом удлиненного стержня и сконструирован для выполнения хирургический процедуры при приложении к нему по меньшей мере одного пускового движения. Пусковой двигатель поддерживается узлом рукоятки и сконструирован для приложения пусковых движений к части узла удлиненного стержня для передачи на хирургический концевой зажим. Хирургический инструмент также содержит блок контрольного рычажного переключателя, который включает блок первого переключателя, подвижно поддерживающийся узлом рукоятки корпусом, и включает рычажный переключатель, который подвижно размещен там же таким образом, что поворотное движение рычажного переключателя относительно узла первого переключателя заставляет по меньшей мере один соответствующий контрольный сигнал отправляться на шарнирный двигатель. Блок рычажного переключателя также включает блок второго переключателя, который содержит первый датчик и второй датчик, способные перемещаться с узлом первого переключателя таким образом, что движение второго датчика относительно первого датчика заставляет по меньшей мере еще один контрольный сигнал отправляться на пусковой двигатель.
В соответствии с еще одной общей формой, представляется хирургический инструмент для работы с тканями. Инструмент содержит по меньшей мере один процессор и оперативную ассоциативную память, по меньшей мере один мотор, связанный с процессором, и по меньшей мере одно активирующее устройство. Процессор запрограммирован принимать от съемной рабочей части первую переменную, описывающую съемную рабочую часть. Процессор также программируется для приложение первой переменной к контрольному алгоритму инструмента. Кроме того, процессор запрограммирован на получение входящего контрольного сигнала от активирующего устройства и контролировать по меньшей мере один двигатель для управления хирургическим инструментом в сочетании со съемной рабочей частью в соответствии с контрольным алгоритмом инструмента, предполагающим входящий контрольный сигнал.
В соответствии с дополнительной общей формой, процессор может быть запрограммирован принимать от съемной рабочей части контрольный алгоритм рабочей части, описывающий операции хирургического инструмента в сочетании со съемной рабочей частью. Процессор также может быть запрограммирован на получение входящего контрольного сигнала от активирующего устройства и контролировать по меньшей мере один двигатель для управления хирургическим инструментом в сочетании со съемной рабочей частью в соответствии с контрольным алгоритмом рабочей части, предполагающим входящий контрольный сигнал.
В соответствии с еще одной общей формой может быть раскрыт хирургический инструмент, сконструированный для ретрансляции сигнала малой мощности от концевого зажима к удаленному устройству. Хирургический инструмент может содержать рукоятку, стержень, дистально выступающий из рукоятки, и концевой зажим, соединенный с дистальным концом стержня. На концевом зажиме может располагаться датчик. Датчик может генерировать сигнал, сообщающий о состоянии на концевом зажиме. На концевом зажиме может располагаться передатчик. Передатчик может передавать сигнал от концевого зажима на первом уровне мощности. Сигнал может быть получен ретрансляционного станцией, расположенной в рукоятке хирургического инструмента. Ретрансляционная станция сконструирована для усиления и ретрансляции сигнала на втором уровне мощности, где второй уровень мощности выше, чем первый уровень мощности.
В соответствии с дополнительно общей формой может быть раскрыта ретрансляционная станция для ретрансляции сигнала от концевого зажима хирургического инструмента к удаленному устройству. Ретрансляционная станция содержит приемник, сконструированный для приема сигнала от датчика, расположенного в концевом зажиме. Сигнал передается на первом уровня мощности. Ретрансляционная станция также содержит усилитель, сконструированным для усиления сигнала до второго уровня мощности. Передатчик сконструирован для передачи сигнала на втором уровне мощности. Второй уровень мощности выше, чем первый уровень мощности.
В соответствии с обшей формой может быть раскрыт метод ретрансляции сигнала, полученного от сенсорного модуля в концевом зажиме. Метод содержит генерирование, с помощью датчика, первого сигнала, сообщающего о состоянии на концевом зажиме. Датчик расположен в концевом зажиме. Метод также содержит передачу, с помощью передатчика, первого сигнала на первом уровне мощности и получение переданного сигнала, с помощью приемника, на ретрансляционной станции. Первый сигнал усиливается ретрансляционной станцией, с помощью усилителя, до сигнала высокой мощности, содержащего второй уровень мощности. Второй уровень мощности выше, чем первый уровень мощности. Сигнал высокой мощности передается, с помощью ретрансляционной станции, на втором уровне мощности. Сигнал высокой мощности принимается удаленным устройством, таким как видео монитор. Видео монитор демонстрирует графическую презентацию состояния на хирургическом концевом зажиме.
Некоторые части вышеописанного представлены в терминах методов и символических репрезентациях операций на битах данных в компьютерной памяти. Эти описания и представления применяются специалистами в данной области для наиболее эффективной передачи сути их работы другим специалистам в данной области. Здесь и в целом метод применяется как самодостаточная последовательность действий (инструкций), ведущих к желательному результату. Эти действия требуют физических манипуляций физическими величинами. Как правило, хотя и не обязательно, эти величины принимают форму электрических, магнитных или оптических сигналов о хранении, передаче, сочетании, сравнении и прочих манипуляциях. Удобно время от времени, в основном в силу причин распространенной практики, называть эти сигналы битами, значениями, элементами, символами, знаками, терминами, числами и т. п. Далее, также удобно время от времени называть некоторые сочетания действий, требующих физических манипуляций физическими величинами, модулями или кодирующими устройствами, без потери общности.
Определенные аспекта настоящего изобретения включают стадии процесса и инструкции, описанные в настоящем документе в форме метода. Следует отметить, что стадии процесса и инструкции настоящего изобретения могут воплощаться в программном обеспечении, прошивке или аппаратном обеспечении, и будучи воплощенными в программном обеспечении могут загружаться для расположения и работы на разных платформах, используемых различными операционными системами.
Настоящее изобретение также относится к аппарату для выполнения операций, описанных в настоящем документе. Этот аппарат может быть специально сконструирован для требуемых работ, или может содержать универсальный компьютер, избирательно активируемый или реконструируемый компьютерной программой, размещенной в компьютере. Подобная компьютерная программа может размещаться на любом считываемом носителе данных, таком как, но не ограничиваясь перечисленным, любой тип диска, в том числе дискеты, оптические диски, CD-ROM, магнитно-оптические диски, постоянные запоминающие устройства (ПЗУ), оперативно запоминающие устройства (ОЗУ), EPROM, EEPROM, магнитные или оптические карточки, применение особых встроенных схем (ASICs) или любой тип носителей, пригодных для хранения электронных инструкций, и каждое соединено с компьютерной системой. Далее, компьютеры и компьютерные системы, указанные в спецификации, могут включать одиночный процессор или быть конструкциями, включающими системы множественных процессоров для увеличения мощности компьютера.
Методы и дисплеи, представленные в настоящем документе, не связаны неотъемлемо с какими-либо компьютерами или другими аппаратами. Различные системы множественного применения могут также использоваться с программами в соответствии с изложенным в настоящем документе, или могут оказаться удобными для конструирования более специализированного аппарата для выполнения требуемых методологических действий. Требуемая структура для этих разнообразных систем становится понятна из вышеизложенного описания. Дополнительно, настоящее изобретение описано без связи с каким-либо языком программирования. Становится понятно, что ряд языков программирования может применяться для воплощения описанного в настоящем изобретении, и любые ссылки на какие-либо языки программирования выше приведены для раскрытия возможностей осуществления и наилучшего режима для настоящего изобретения.
В различных формах раскрыт хирургический инструмент, сконструированный для ретрансляции сигнала малой мощности от концевого зажима к удаленному устройству. Хирургический инструмент может содержать рукоятку, стержень, дистально выступающий из рукоятки, и концевой зажим, соединенный с дистальным концом стержня. На концевом зажиме может располагаться датчик. Датчик может генерировать сигнал, сообщающий о состоянии на концевом зажиме. На концевом зажиме может располагаться передатчик. Передатчик может передавать сигнал от концевого зажима на первом уровне мощности. Сигнал может быть получен ретрансляционного станцией, расположенной в рукоятке хирургического инструмента. Ретрансляционная станция сконструирована для усиления и ретрансляции сигнала на втором уровне мощности, где второй уровень мощности выше, чем первый уровень мощности.
В различных формах раскрыта ретрансляционная станция для ретрансляции сигнала от концевого зажима хирургического инструмента к удаленному устройству. Ретрансляционная станция содержит приемник, сконструированный для приема сигнала от датчика, расположенного в концевом зажиме. Сигнал передается на первом уровня мощности. Ретрансляционная станция также содержит усилитель, сконструированным для усиления сигнала до второго уровня мощности. Передатчик сконструирован для передачи сигнала на втором уровне мощности. Второй уровень мощности выше, чем первый уровень мощности.
В различных формах раскрыт метод ретрансляции сигнала, полученного от сенсорного модуля в концевом зажиме. Метод содержит генерирование, с помощью датчика, первого сигнала, сообщающего о состоянии на концевом зажиме. Датчик расположен в концевом зажиме. Метод также содержит передачу, с помощью передатчика, первого сигнала на первом уровне мощности и получение переданного сигнала, с помощью приемника, на ретрансляционной станции. Первый сигнал усиливается ретрансляционной станцией, с помощью усилителя, до сигнала высокой мощности, содержащего второй уровень мощности. Второй уровень мощности выше, чем первый уровень мощности. Сигнал высокой мощности передается, с помощью ретрансляционной станции, на втором уровне мощности. Сигнал высокой мощности принимается удаленным устройством, таким как видео монитор. Видео монитор демонстрирует графическую презентацию состояния на хирургическом концевом зажиме.
В различных формах раскрыт выпрямляемый с помощью датчика концевой зажим. Выпрямляемый с помощью датчика концевой зажим может содержать концевой зажим, соединенный со стержнем в точке шарнирного сгиба. Концевой зажим может сгибаться под углом относительно стержня. Датчик может располагаться на выпрямляемом с помощью датчика концевом зажиме, например на стержне или на концевом зажиме. Датчик сконструирован для обнаружения грубого проксимального движения хирургического инструмента. При обнаружении грубого проксимального движения датчик может генерировать сигнал для контроля двигателя, чтобы выпрямить концевой зажим относительно стержня.
В различных формах раскрыт хирургический инструмент, содержащий выпрямляемый с помощью датчика концевой зажим. Хирургический инструмент может содержать рукоятку. Стержень может дистально выступать из рукоятки. Двигатель может располагаться в рукоятке, с целью контроля шарнирного сгибания хирургического инструмента. Способный шарнирно сгибаться концевой зажим находится на дистальным конце стержня. Датчик может располагаться в рукоятке, на стержне или на концевом зажиме. Датчик может быть сконструирован для обнаружения грубого проксимального движения хирургического инструмента. Когда датчик обнаруживает грубое проксимальное движение, датчик может активировать процесс выпрямления, заставляя двигатель выпрямить согнутый концевой зажим. В некоторых формах многочисленные датчики могут предоставлять резервную проверку выпрямляющего процесса.
В различных формах раскрыт метод работы хирургического инструмента, содержащего выпрямляемый с помощью датчика концевой зажим. Метод может содержать обнаружение, первым датчиком, проксимального движения хирургического инструмента. Первый датчик может располагаться в любой пригодной секции хирургического инструмента, такой как рукоятка, стержень или концевой зажим. Первый датчик может быть акселерометром, магнитным датчиком или датчиком любого пригодного типа. Датчик может генерировать сигнал, указывающий на обнаружение грубого проксимального движения. Метод может также содержать получение двигателем генерированного сигнала от первого датчика. Двигатель может выпрямить угол шарнирного сгиба контролируемого двигателем концевого зажима в ответ на полученный сигнал. Второй датчик может генерировать второй сигнал для предоставления дополнительной проверки.
В различных формах настоящее раскрытие направлено на ведомый двигателем хирургический инструмент, содержащий модульную контрольную платформу. Главный контроллер может осуществлять главный контрольный процесс для контролирования одной или нескольких операций хирургического инструмента. Первый контроллер двигателя и второй контроллер двигателя могут быть функционально подключены к главному контроллеру. Первый контроллер двигателя может иметь связанный с ним первый двигатель, и второй контроллер двигателя может иметь связанный с ним второй двигатель. Главный контрольный процесс может генерировать контрольные сигналы для первого и второго контроллеров двигателей. Первый и второй контроллеры двигателей могут оперировать первым и вторым двигателем в ответ на контрольные сигналы. В некоторых формах модульная система контроля двигателей может содержать второстепенный контроллер, сконструированный для контроля одного или нескольких контроллеров двигателей, основанный на одном или нескольких контрольных сигналах, полученных второстепенным контроллером от главного контроллера.
В различных формах модульная система контроля двигателей может содержать один или несколько контроллеров двигателей, у каждого из которых есть связанный с ним двигатель. Один или несколько контроллеров двигателей может быть связан с главным контроллером. Главный контроллер может быть сконструирован для подачи контрольных сигналов на контроллеры двигателей как части главного контрольного процесса. Контроллеры двигателей могут контролировать связанные с ними двигатели в ответ на полученные контрольные сигналы. В некоторых формах один или несколько контроллеров двигателей и связанные с ними двигатели могут располагаться в рукоятке, разработанной для приема модульного стержня, модульного концевого зажима и модульного источника питания. Рукоятка может обеспечивать взаимодействие между двигателями и модульным стержнем и концевым зажимом.
В различных формах хирургический инструмент может включать модульную систему контроля двигателей. Хирургический инструмент может содержать главный контроллер. Хирургический инструмент может быть сконструирован для приема модульных хирургических компонентов, таких как модульный стержень и рабочая часть. Хирургический инструмент может иметь один или несколько двигателей и связанных с ними контроллеров двигателей, расположенных в нем. Контроллеры двигателей могут быть функционально соединены с двигателями. Двигатели могут быть сконструированы для контроля одного или нескольких движений подсоединенного стержня или рабочей части. Главный контроллер и контроллеры двигателей могут находиться в электрической коммуникации. Главный контроллер может быть сконструирован для подачи одного или нескольких контрольных сигналов на контроллеры двигателей как части главного контрольного процесса. Контроллеры двигателей могут контролировать двигатели в ответ на полученные контрольные сигналы.
В различных формах раскрыт метод для контроля хирургического инструмента, управляемого двигателями. Метод может содержать генерирование, с помощью главного контроллера, одного или нескольких контрольных сигналов. Первый контрольный сигнал может быть передан на первый контроллер двигателя, сконструированный для контроля первого двигателя. Первый контроллер двигателя может управлять первым двигателем в ответ на первый контрольный сигнал, полученный от главного контроллера. Второй контрольный сигнал может быть передан на второй контроллер двигателя, сконструированный для контроля второго двигателя. Второй контроллер двигателя может управлять вторым двигателем в ответ на второй контрольный сигнал, полученный от главного контроллера. В некоторых формах второй контрольный сигнал может генерироваться второстепенным контроллером.
Согласно одной из общих форм, представлен хирургический инструмент, содержащий приводной двигатель и приводной элемент, способный перемещаться с помощью приводного двигателя путем приводного такта между исходной позицией и позицией конца такта. Позиция конца такта располагается между первой позицией и второй позицией. Механический упор может располагаться на или возле позиции конца такта и может быть структурирован для повышения сопротивления движению приводного элемента через приводной такт от первой позиции ко второй позиции. Механический упор может содержать амортизатор и элемент сопротивления. Амортизатор может быть способным перемещаться из первой позиции во вторую позицию и быть сконструированным для контакта с приводным элементом в первой позиции. Элемент сопротивления может быть функционально соединен с амортизатором и сконструирована для увеличения сопротивления движению приводного элемента от первой позиции ко второй позиции. Элемент сопротивления может быть сконструирован для замедления приводного элемента перед активацией приводного элемента во второй позиции. В одной форме элемент сопротивления структурирован быть сжимаемым для постепенного повышения сопротивления движению приводного элемента между первой позицией и второй позицией. Элемент сопротивления в одной из форм может содержать пружину. Амортизаторы могут содержать контактные поверхности, подобранные по размеру для совпадения по размеру с поверхностью приводного элемента, с которой они контактируют в первый позиции.
В одной форме контрольная система сконструирована для обнаружения скачка напряжения, связанного с возросшим сопротивлением движению приводного элемента. Контрольная система может отслеживать напряжение, связанное с подачей питания на приводной двигатель, для обнаружения скачка напряжения. Скачок напряжения может содержать предварительно заданное пороговое напряжение. Предварительно заданное пороговое напряжение может содержать по меньшей мере один дифференциал предварительно заданного порогового напряжения на протяжении по меньшей мере одного заданного временного периода. Когда контрольная система обнаруживает скачок напряжения, подача питания на приводной двигатель может быть прервана. В одной форме механический упор может также содержать жесткий упор, который может препятствовать движению приводного элемента за пределы второй позиции.
В соответствии с одной общей формой представлен механический упор для применения в хирургическом инструменте для произведения обнаруживаемого скачка напряжения, связанного с электромеханическим упором. Например, механический упор может располагаться на или в конце такта, связанного с приводным тактом приводного элемента. Позиция конца такта может располагаться между первой позицией и второй позицией. Механический упор может содержать один или несколько амортизаторов и один или несколько элементов сопротивления. Амортизаторы могут быть способными перемещаться из первой позиции во вторую позицию и быть сконструированными для контакта с приводным элементом в первой позиции. Элементы сопротивления могут быть функционально соединены с амортизаторами и сконструированы для увеличения сопротивления движению приводного элемента от первой позиции ко второй позиции. Элементы сопротивления могут быть сконструированы для замедления приводного элемента перед активацией приводного элемента во второй позиции. Один или несколько элементов сопротивления могут быть структурированы быть сжимаемыми для постепенного повышения сопротивления движению приводного элемента между первой позицией и второй позицией. Один или несколько элементов сопротивления могут быть структурированы быть сжимаемыми и могут содержать по меньшей мере одну пружину. Амортизаторы могут содержать контактные поверхности, подобранные по размеру для совпадения по размеру с поверхностью приводного элемента, с которой они контактируют в первый позиции. Скачок напряжения, связанный с возросшим сопротивлением может обнаруживаться контрольной системой, связанной с электромеханическим хирургическим инструментом. Контрольная система может быть сконструирована для мониторинга напряжения, связанного с подачей питания на приводной двигатель и прерывать подачу питания на приводной двигатель когда скачок напряжения содержит по меньшей мере одно предварительно заданное пороговое напряжение. Предварительно заданное пороговое напряжение может содержать дифференциал напряжения на протяжении по меньшей мере одного заданного временного периода. В одной форме механический упор также содержит жесткий упор для препятствия движению приводного элемента за пределы второй позиции.
Описываемые в настоящем документе устройства могут быть выполнены с возможностью утилизации после разового применения или могут быть выполнены с возможностью применения множество раз. Однако в любом случае устройство можно восстановить для повторного применения после по меньшей мере одного применения. Восстановление может включать любую комбинацию стадий разборки устройства, с последующей очисткой или заменой конкретных частей, и дальнейшей сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно собрать вновь для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать самые разные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Предпочтительно описанный здесь предмет изобретения будет проходить обработку перед проведением хирургической операции. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и инструмент затем помещают в поле излучения, которое способно проникнуть в контейнер, такое как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение убивает бактерии на инструменте и в контейнере. Стерилизованный инструмент может затем храниться в стерильном контейнере. Запечатанный контейнер сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Любой патент, публикация или другая информация, которые полностью или частично включены в данный документ посредством ссылки, являются составной частью данного документа в той степени, в какой они не противоречат определениям, положениям и другой информации, представленной в настоящем документе. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал, или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Поскольку в описании настоящего изобретения представлены примеры вариантов осуществления, настоящее изобретение может быть модифицировано в рамках сущности и объема его содержания. Настоящая заявка охватывает все возможные варианты, способы применения или модификации изобретения, соответствующие его основным принципам. Кроме того, настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области техники, к которой относится настоящее изобретение.
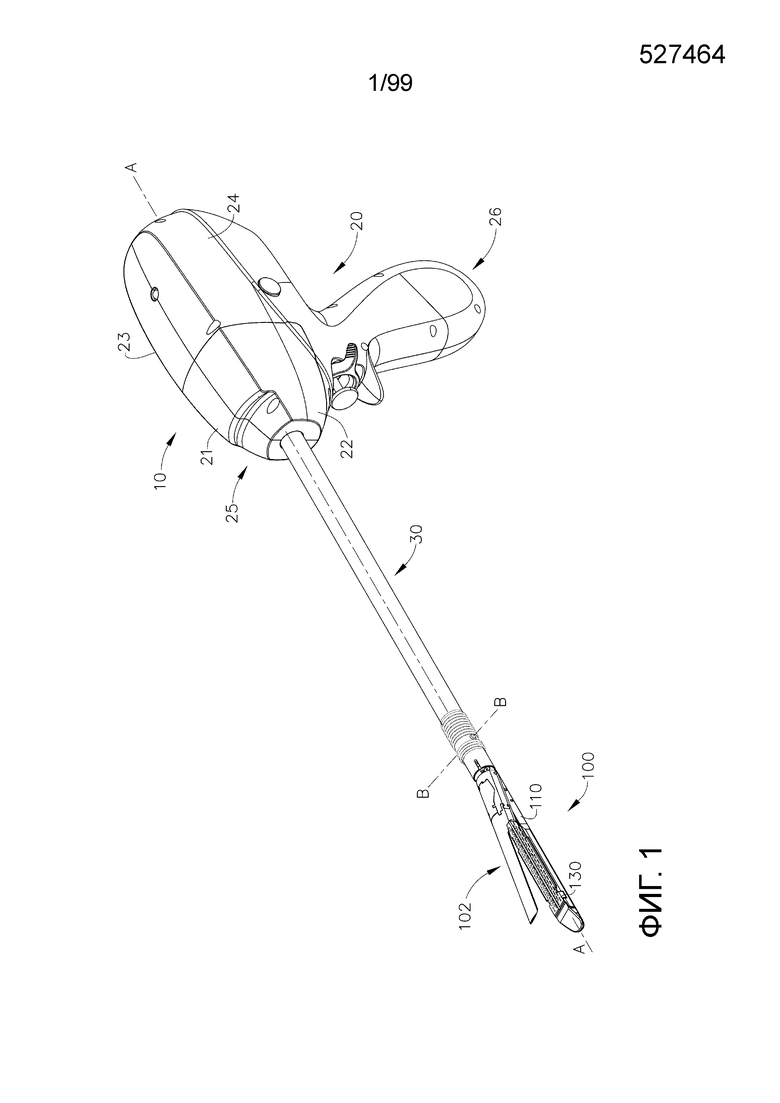
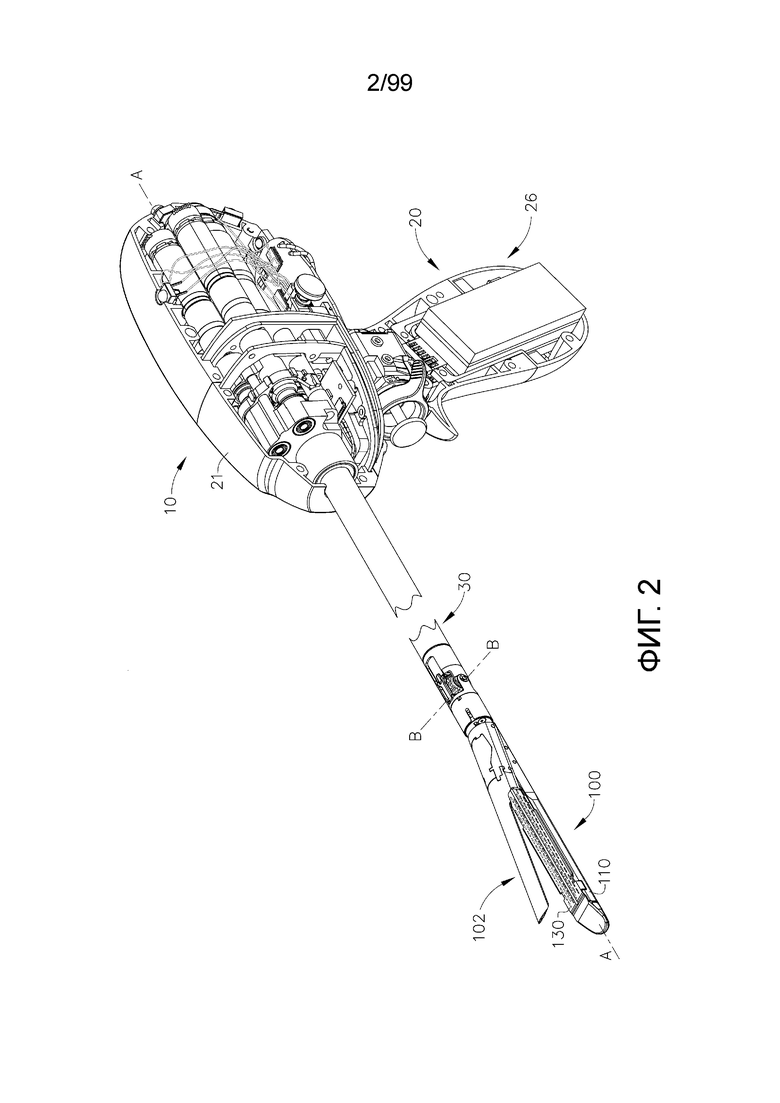
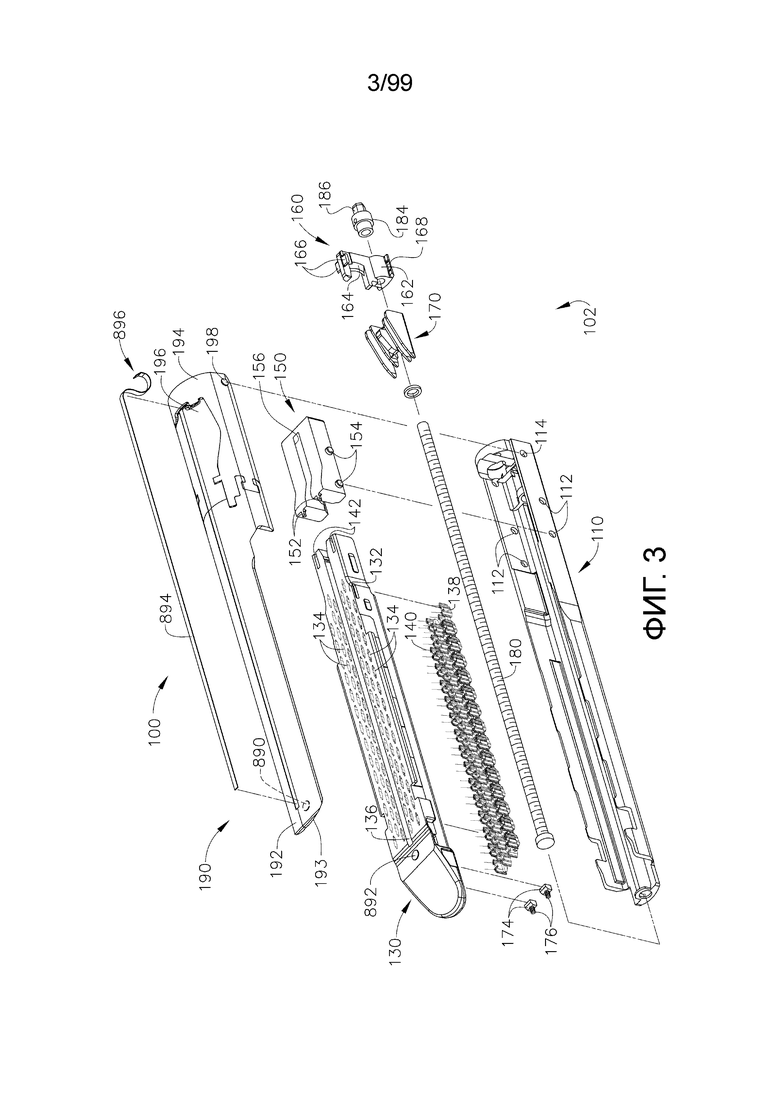
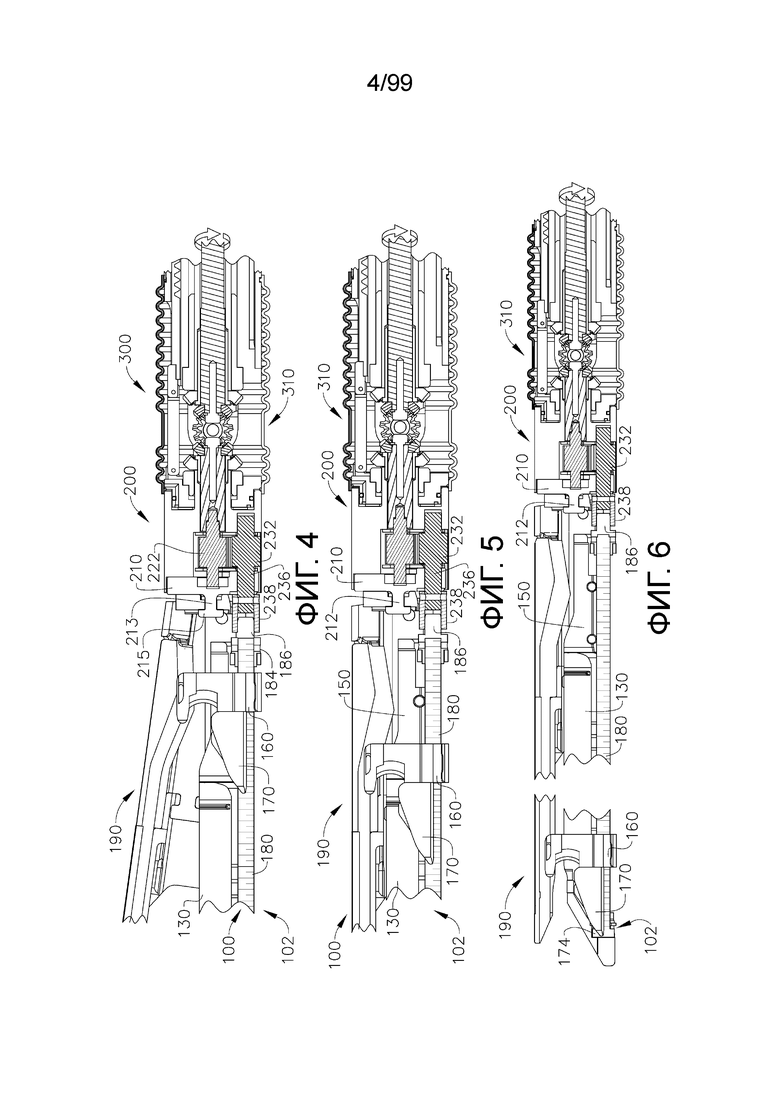
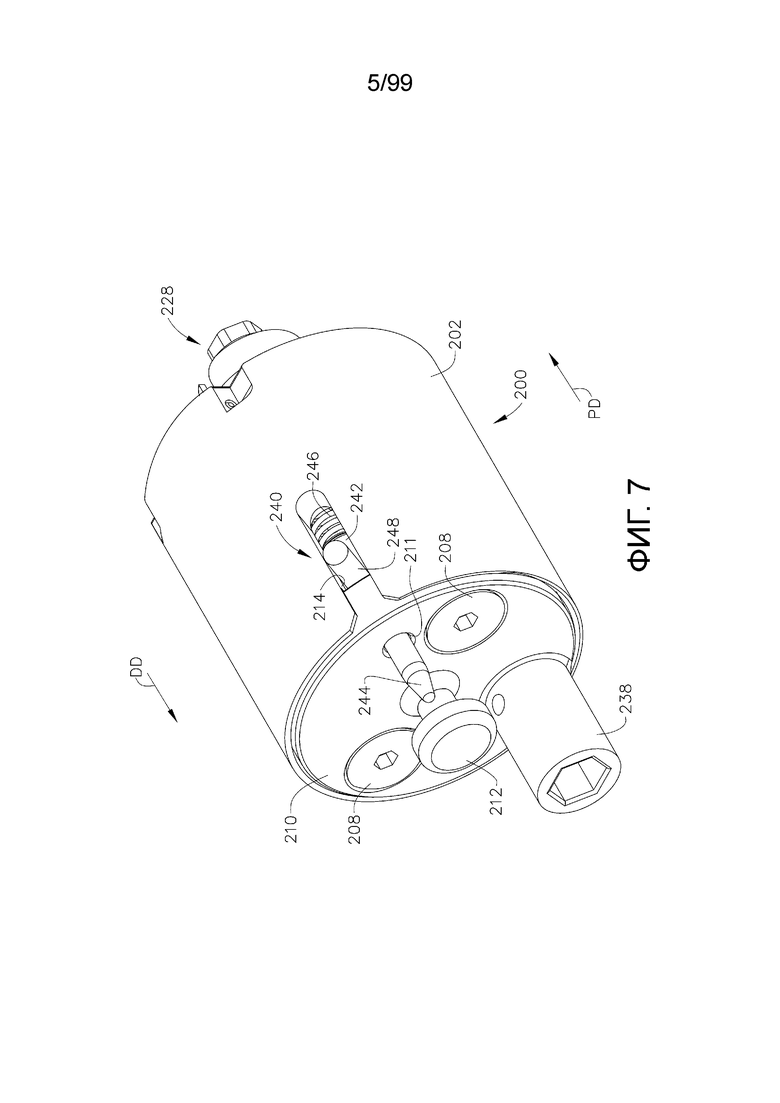
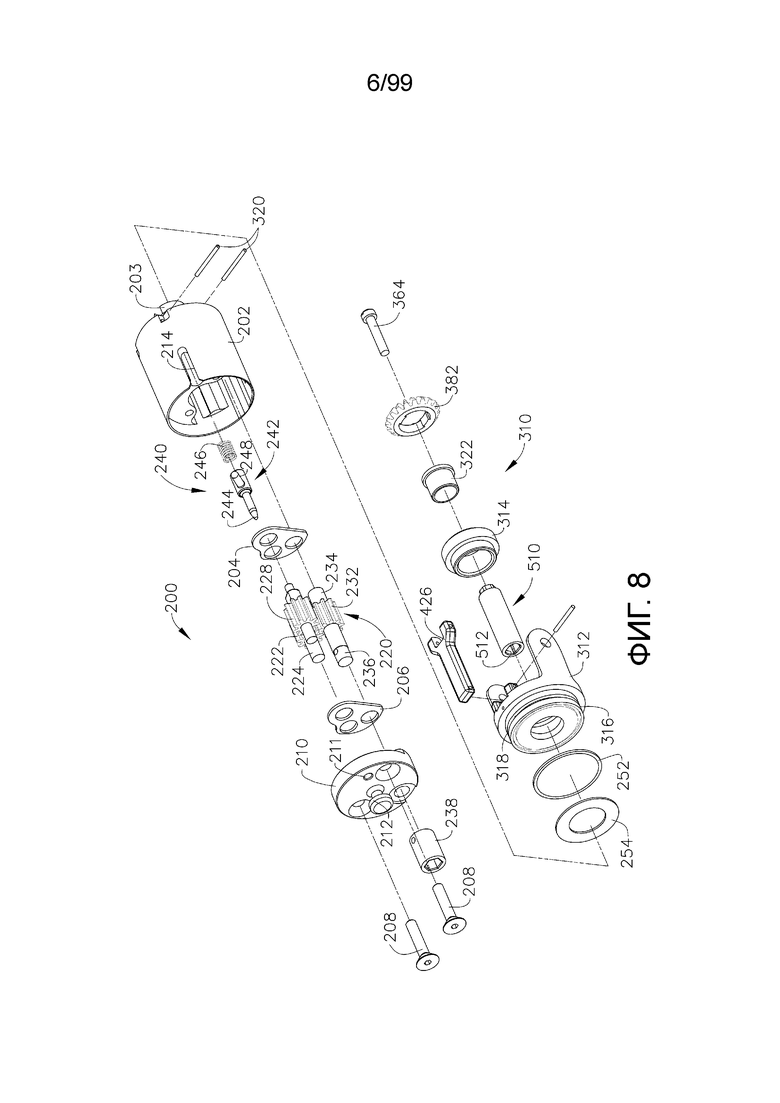
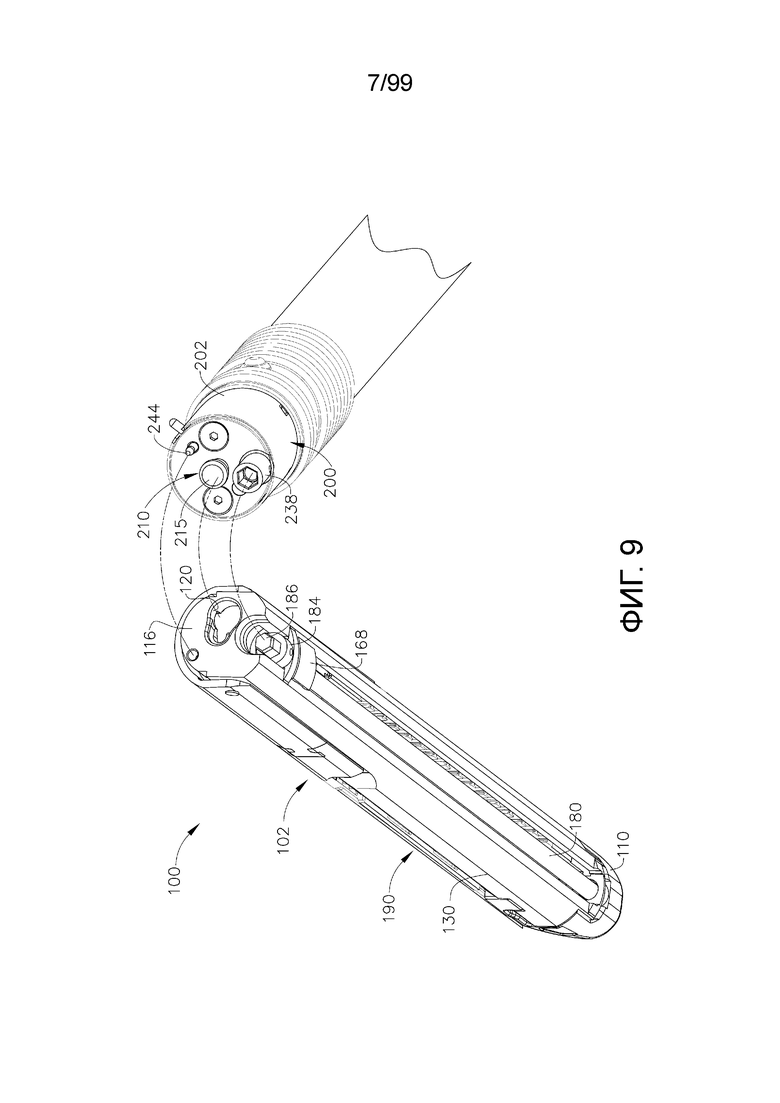
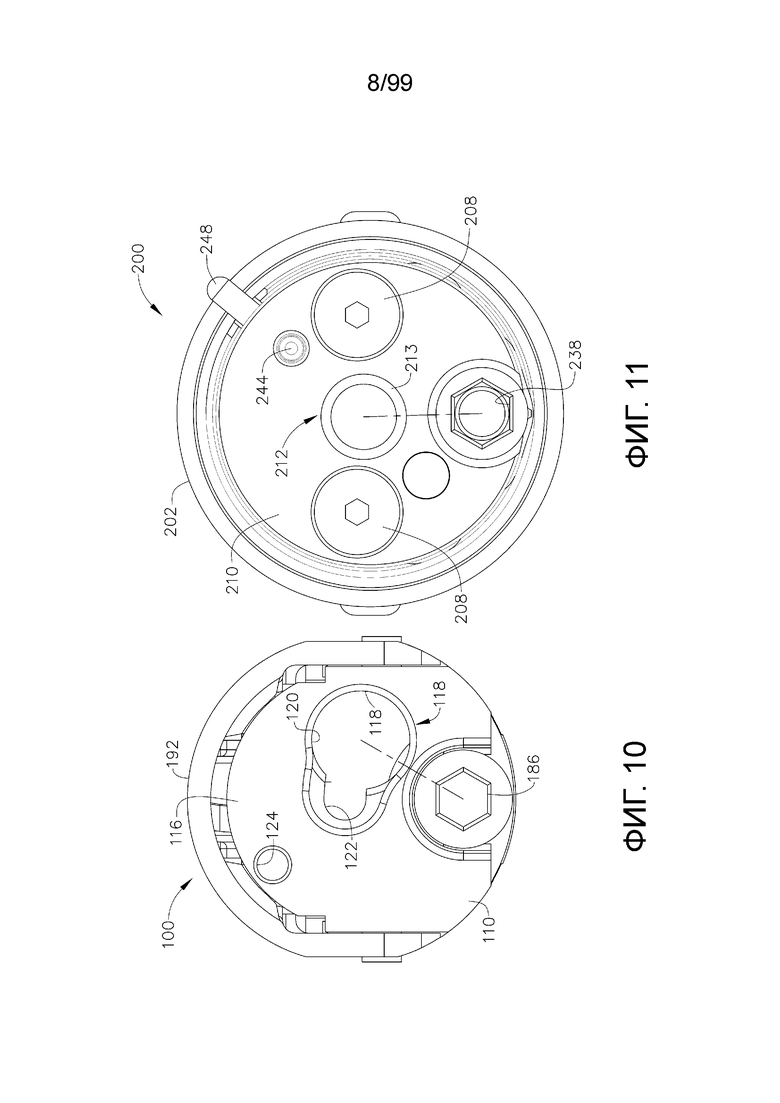
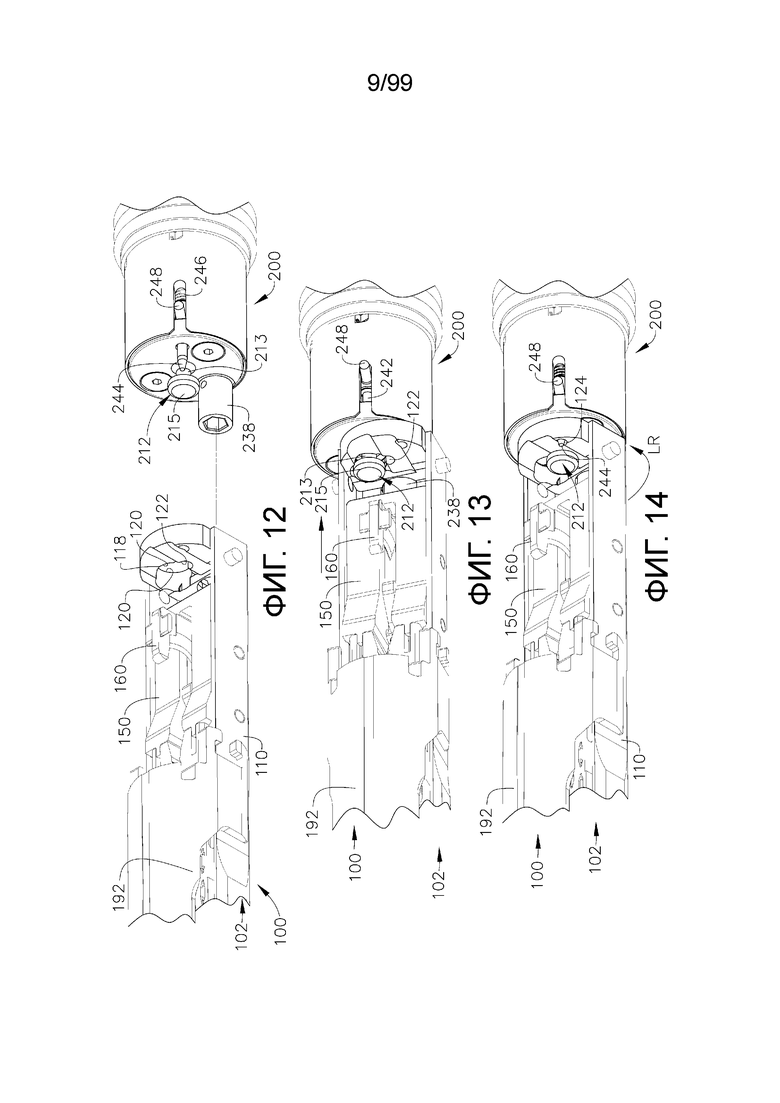
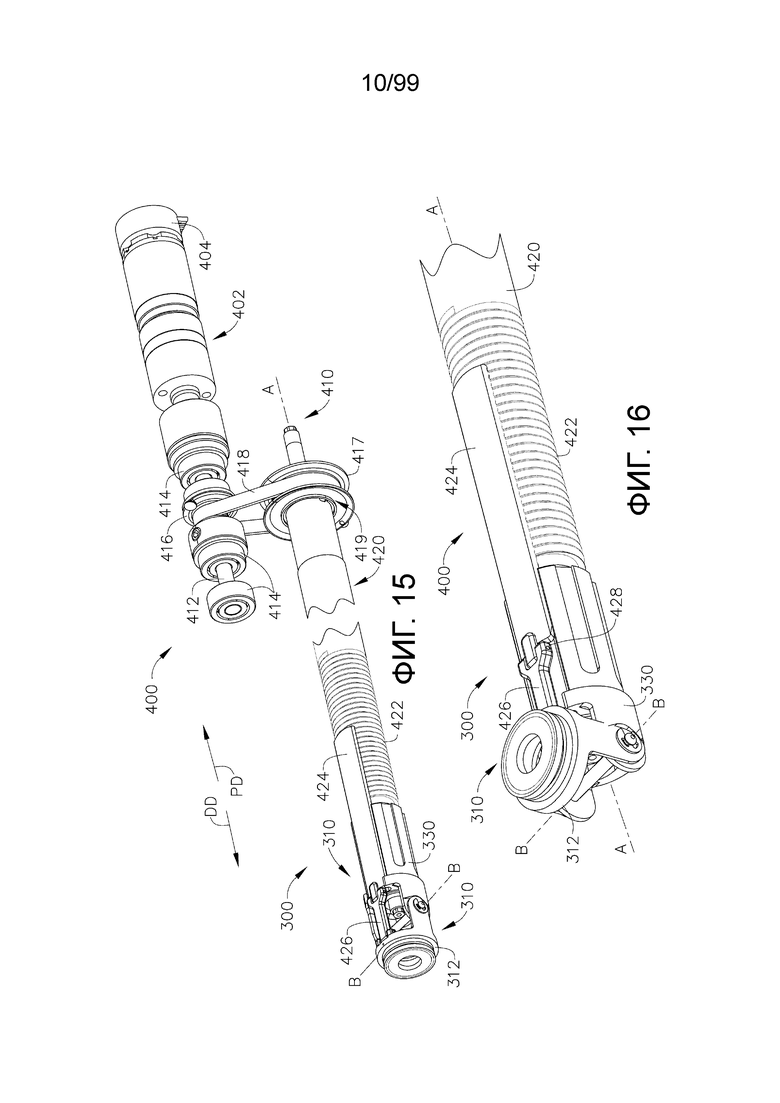
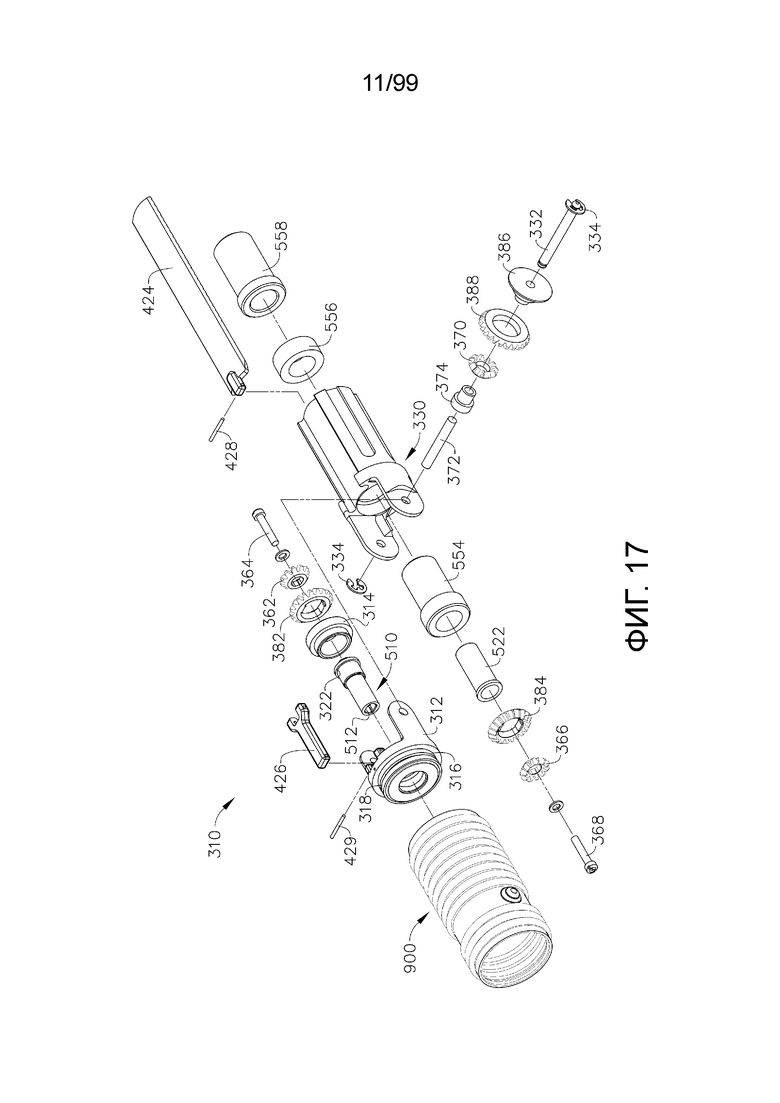
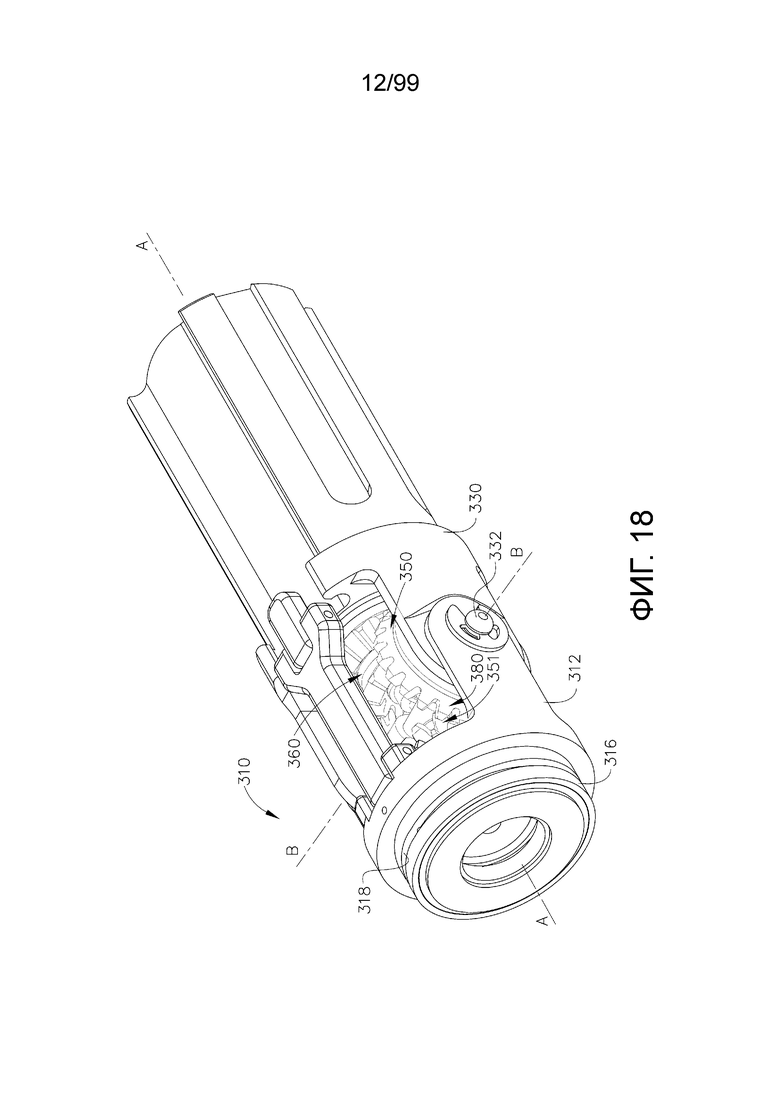
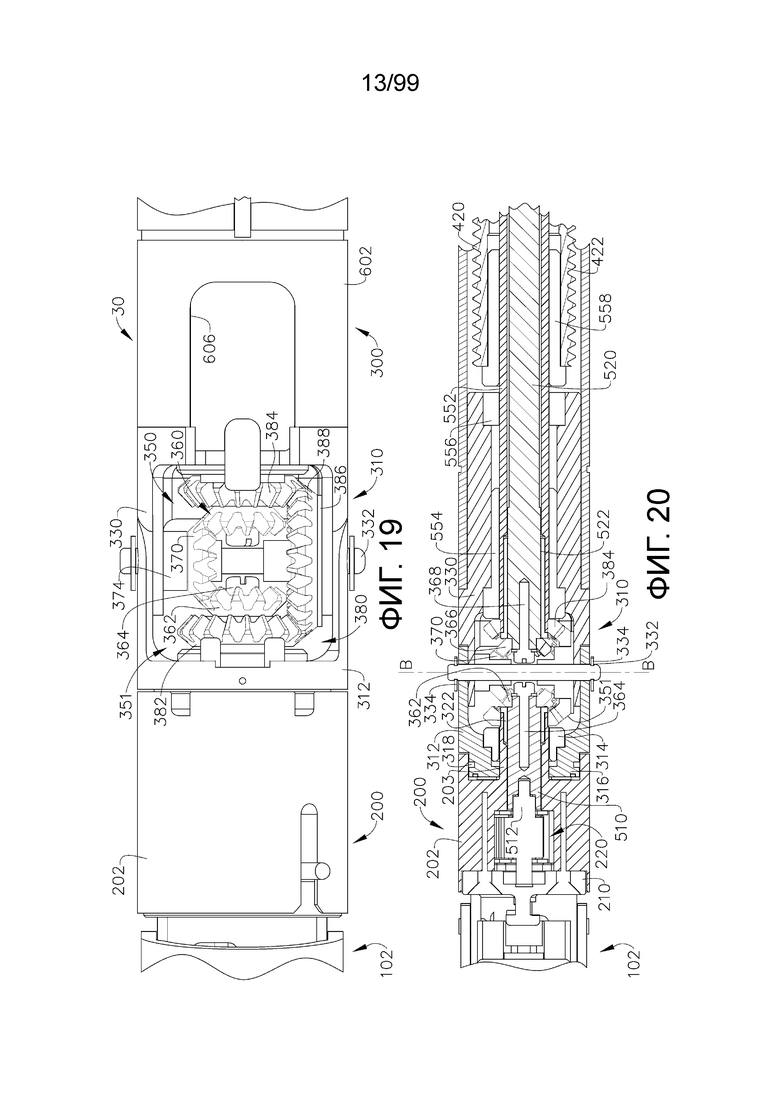
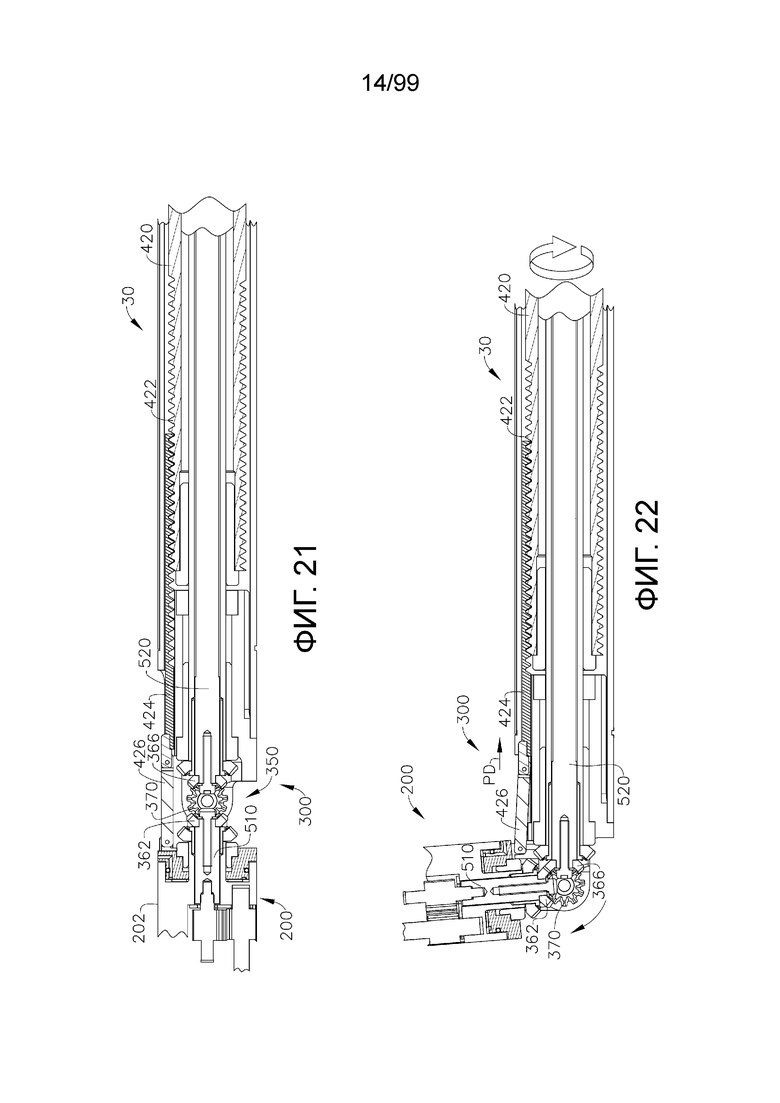
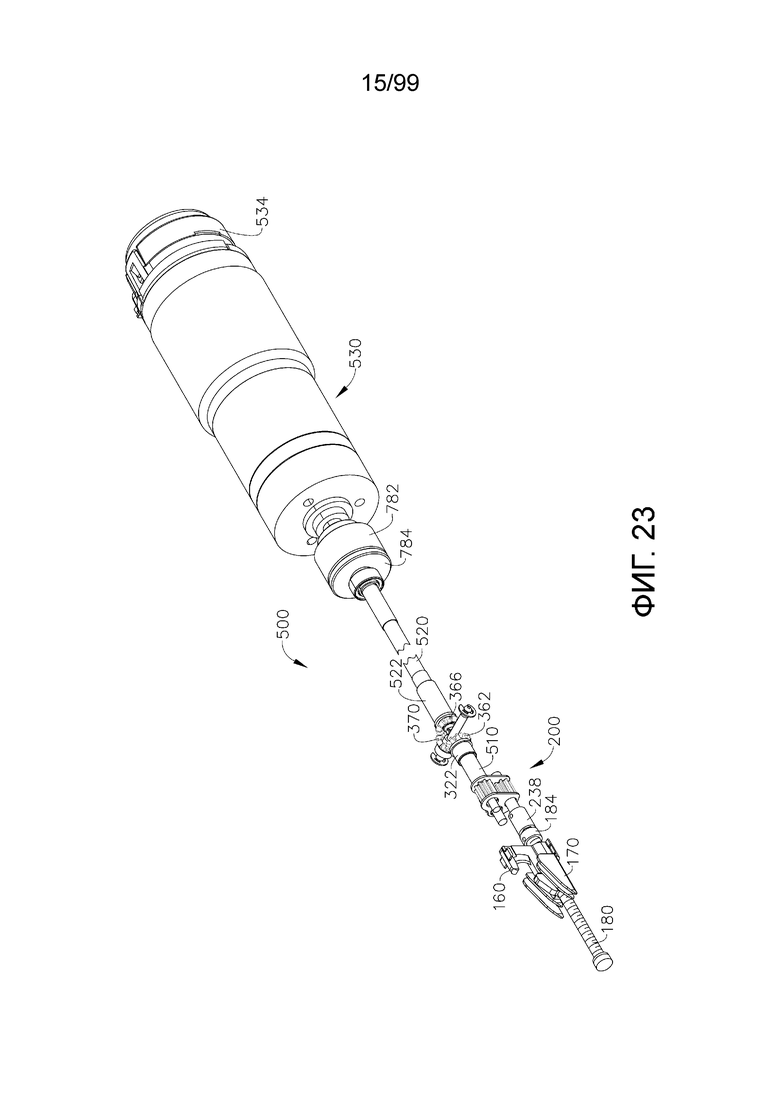
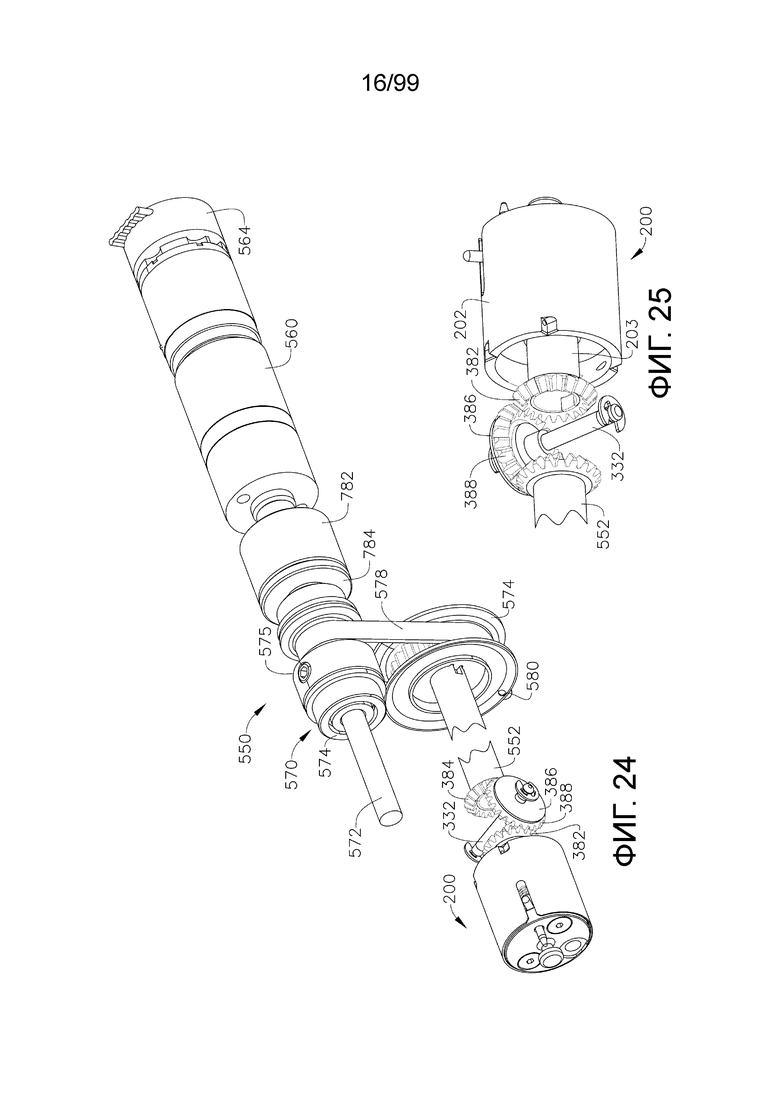
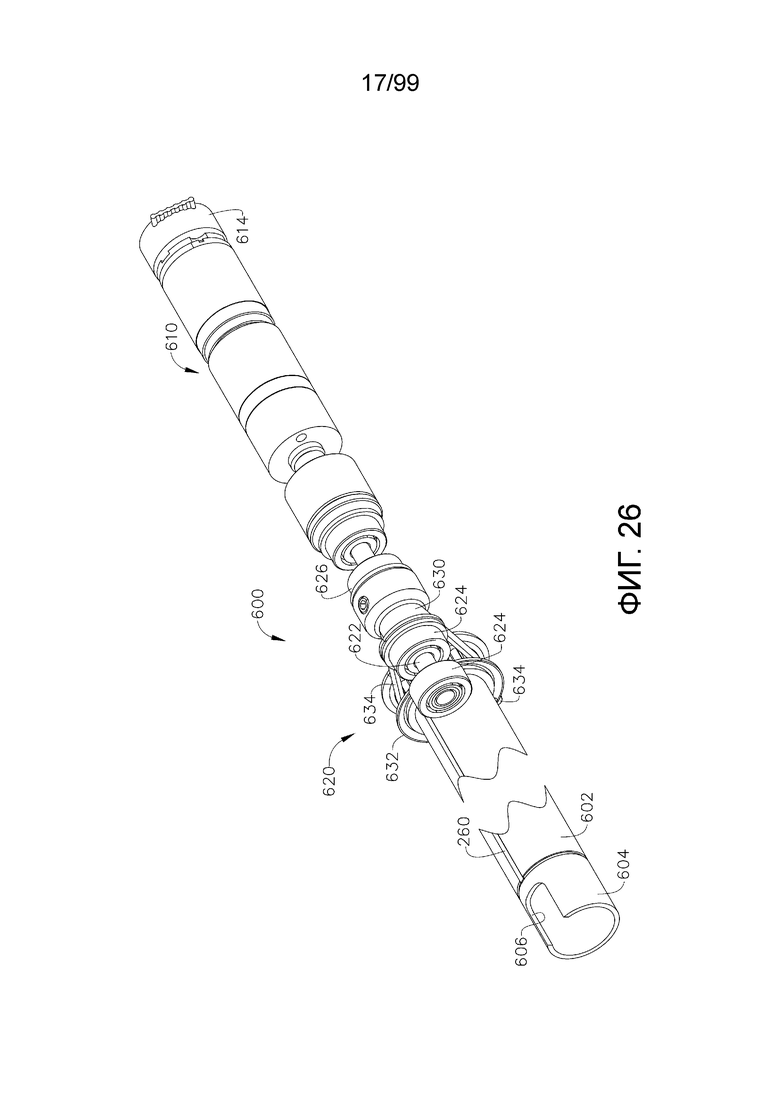
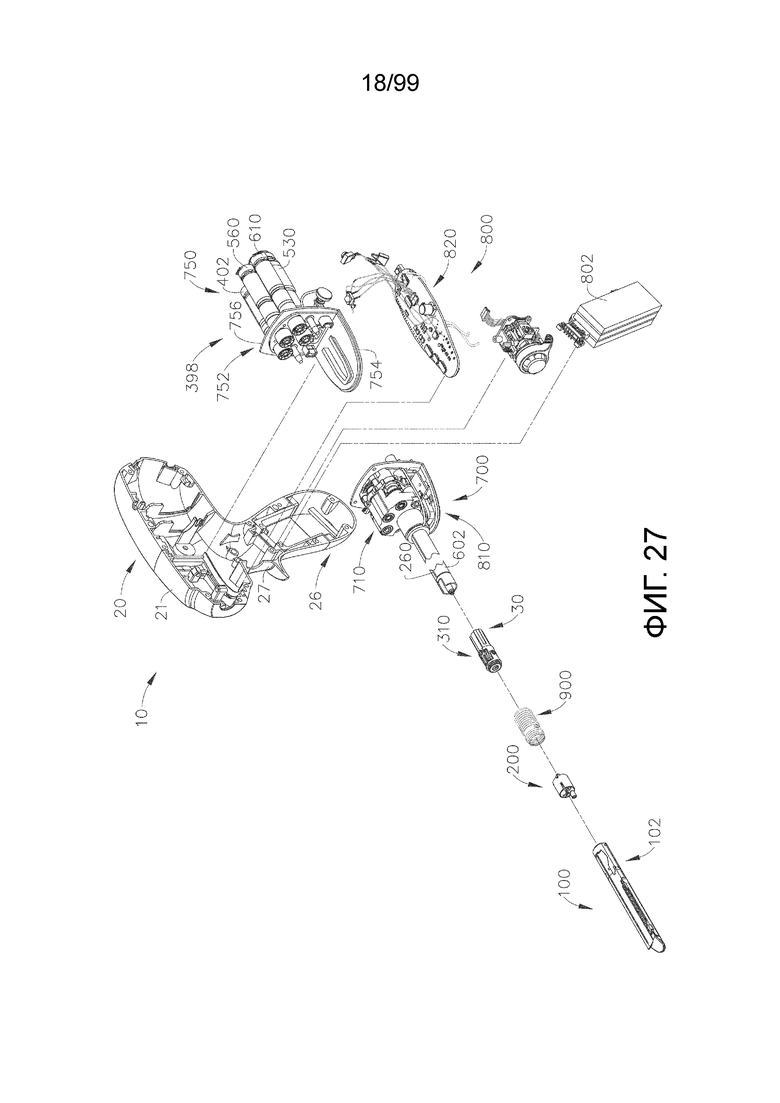
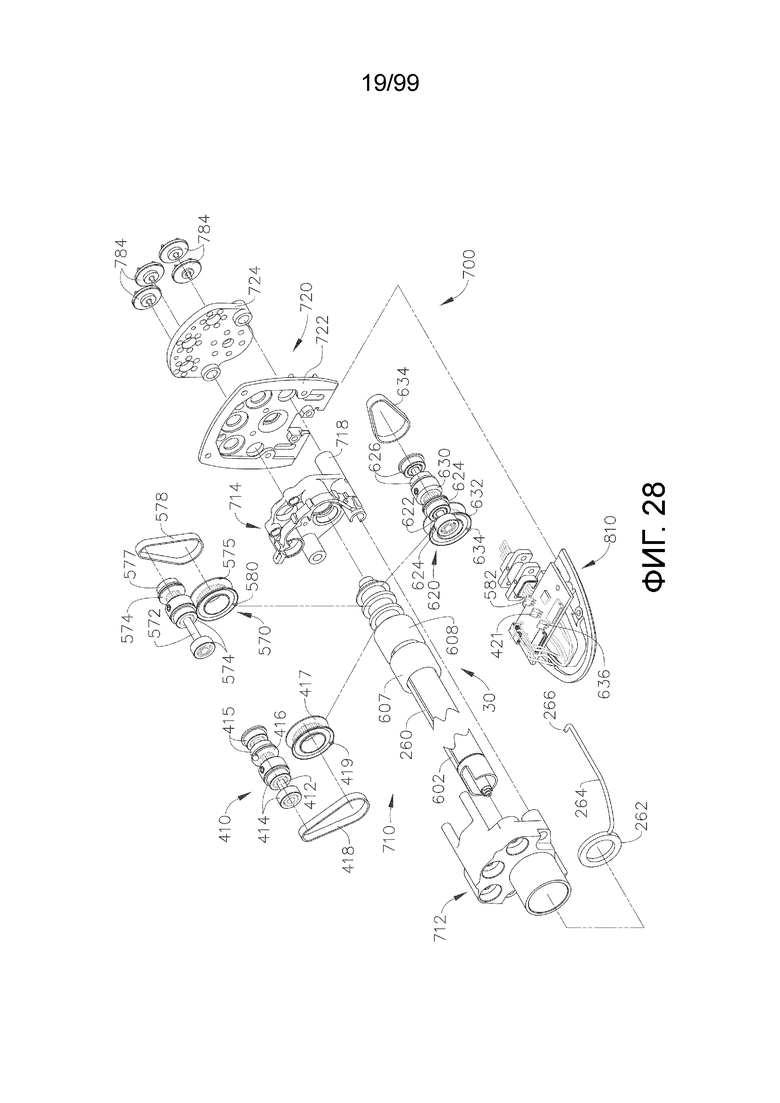
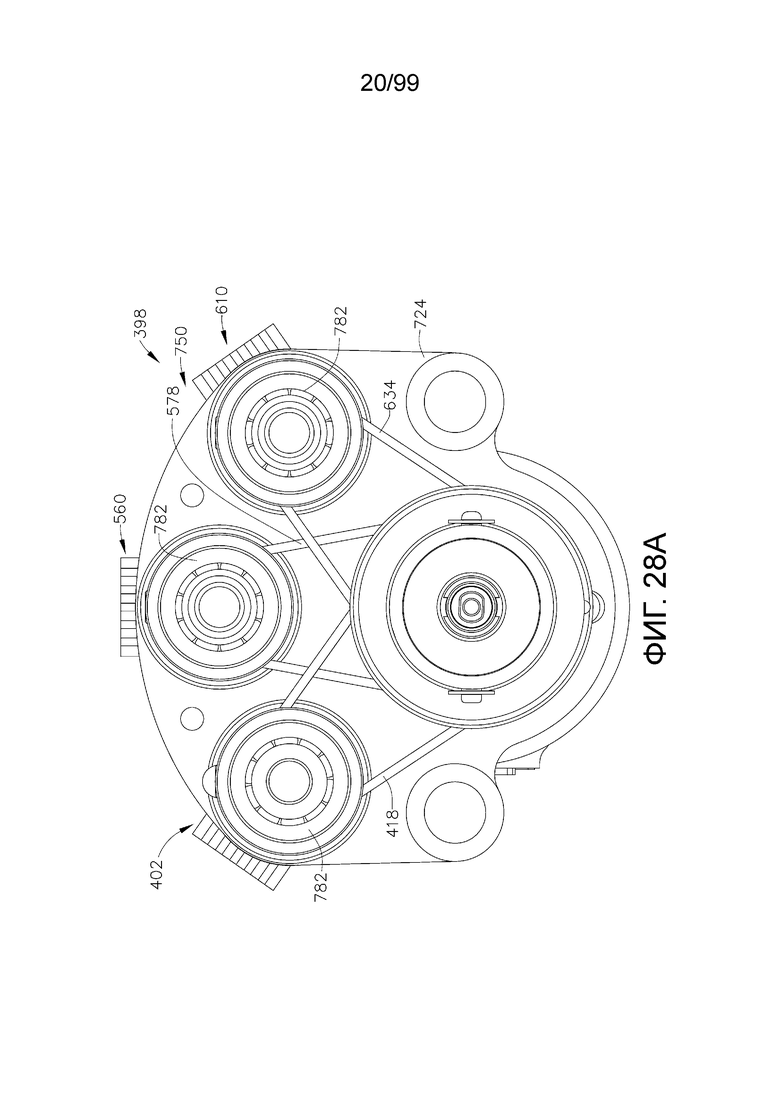
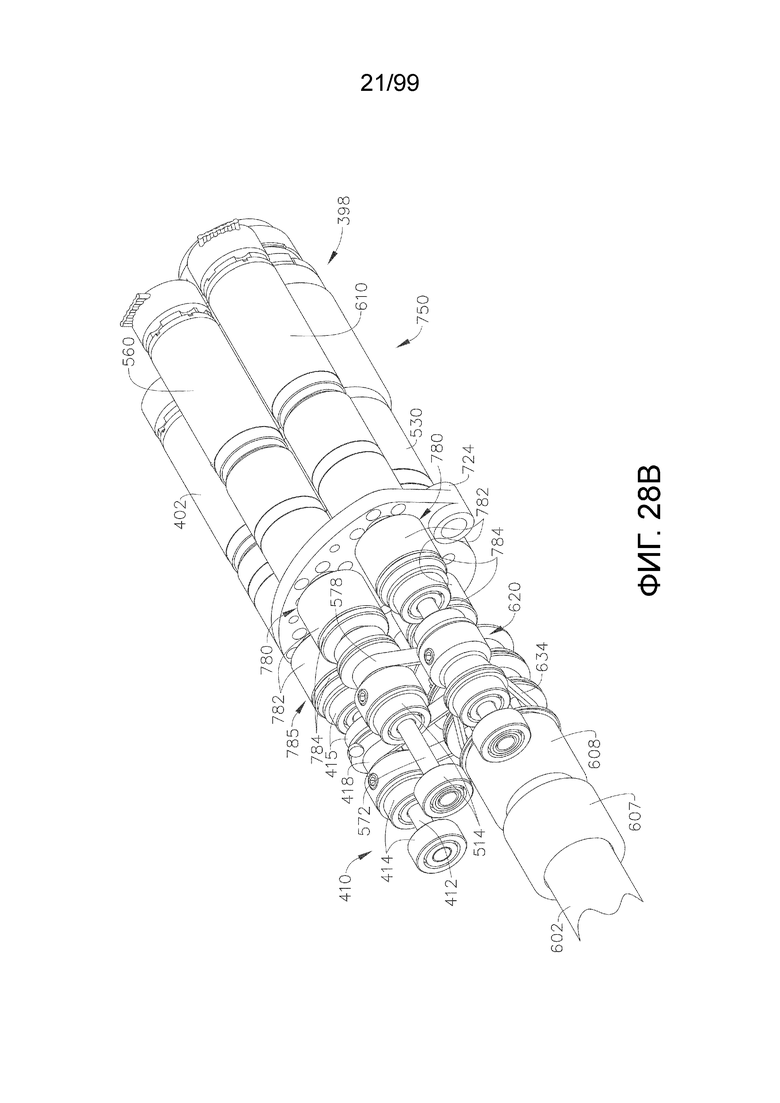
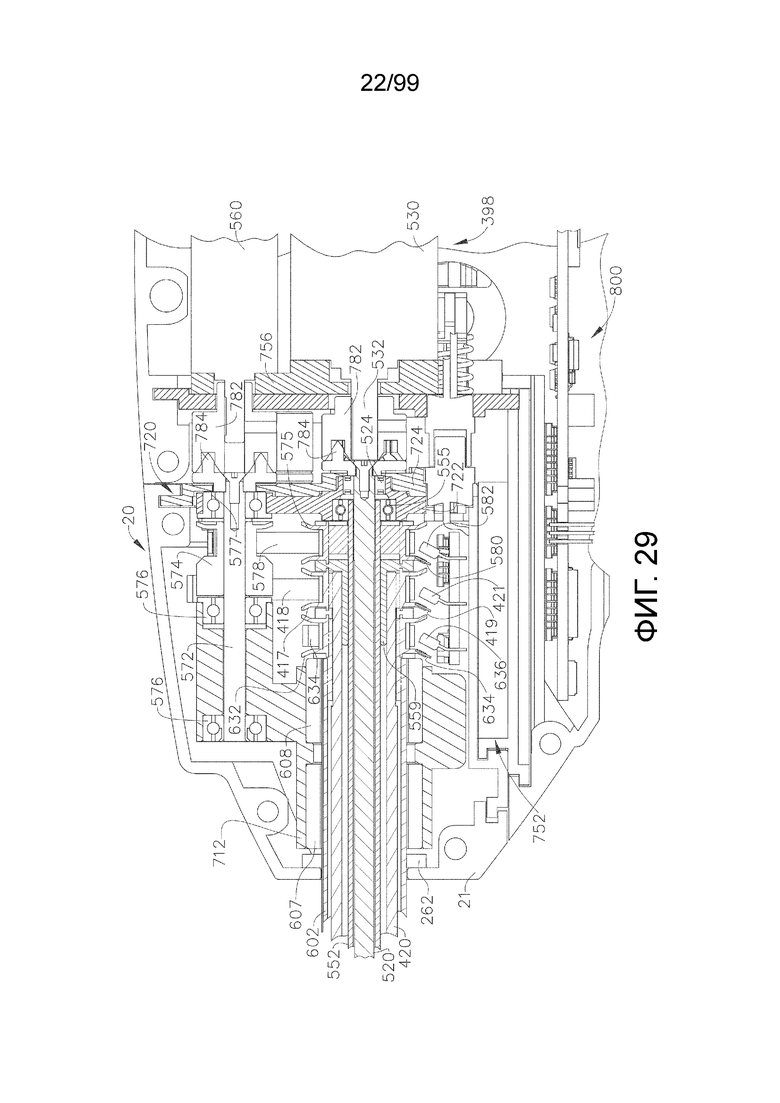
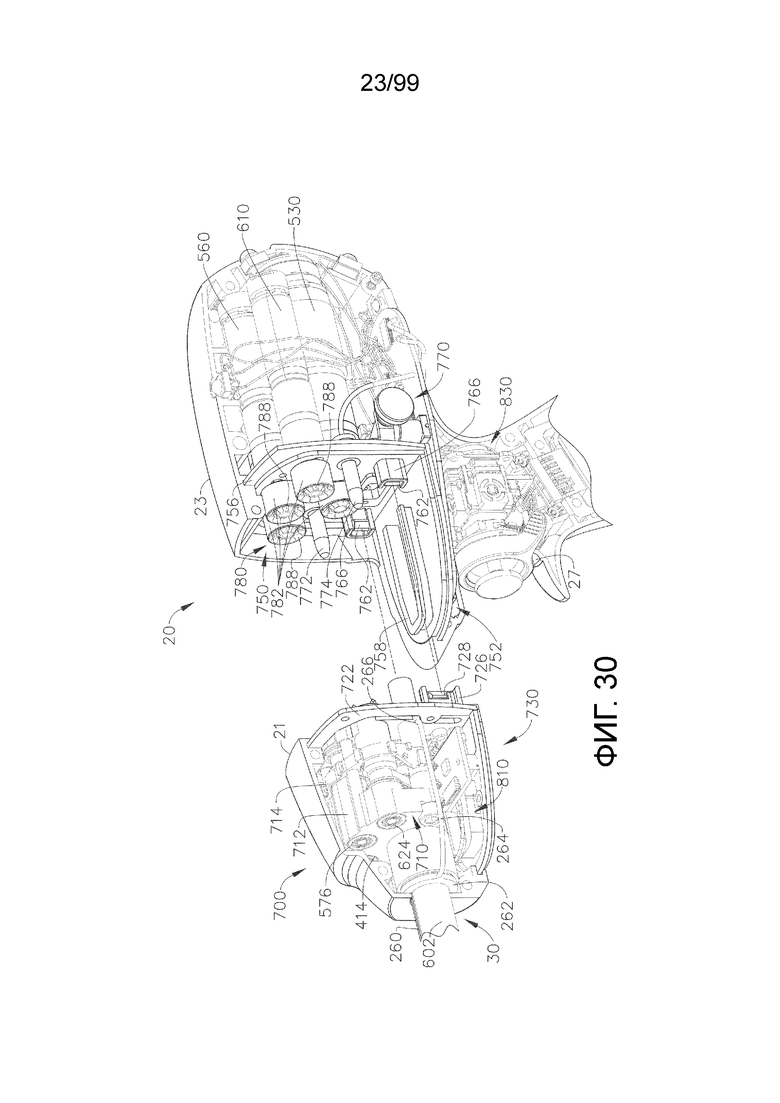
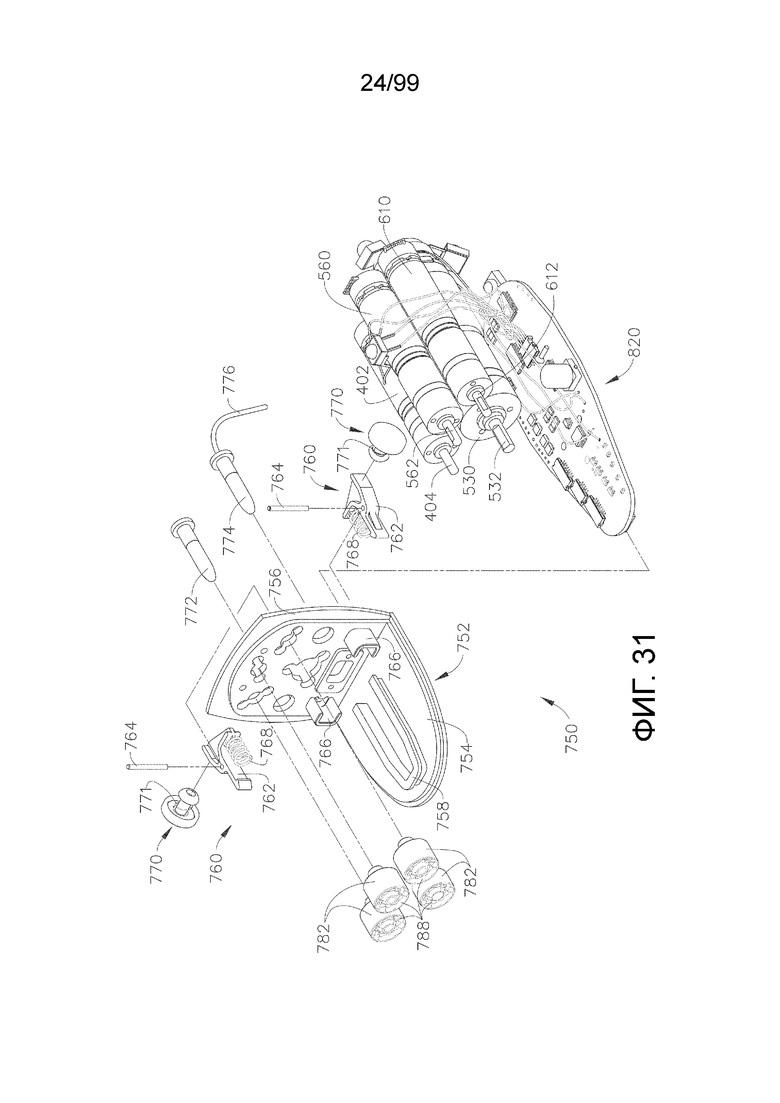
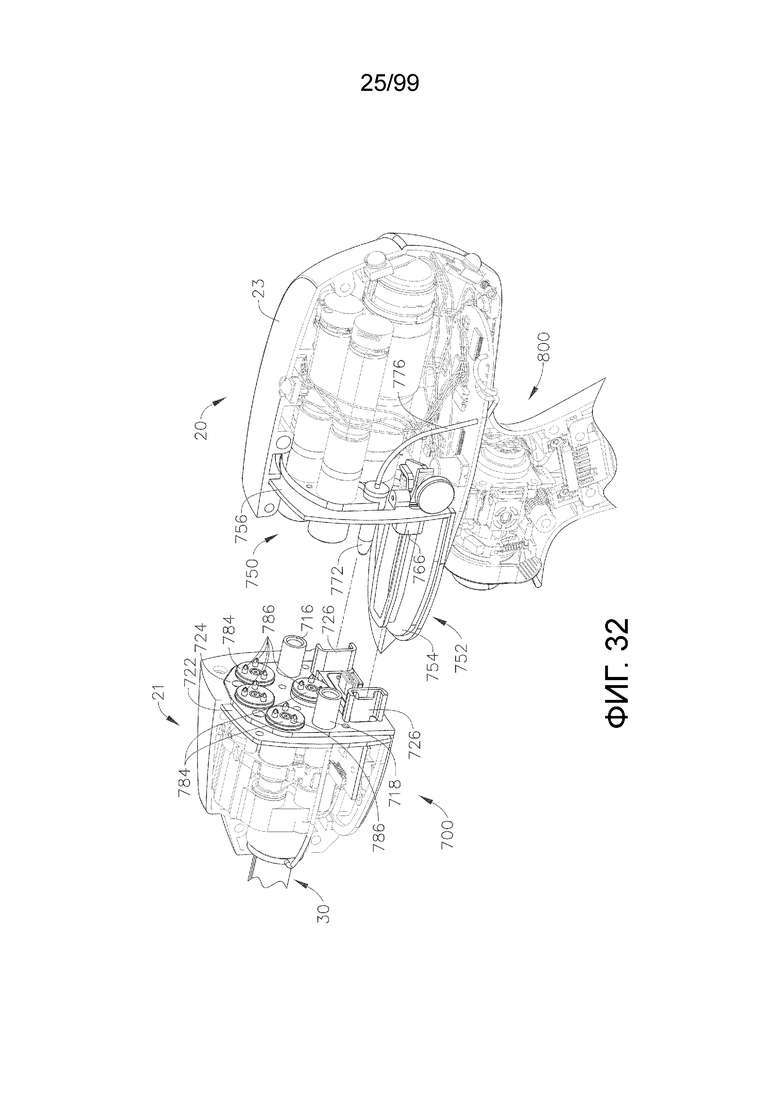
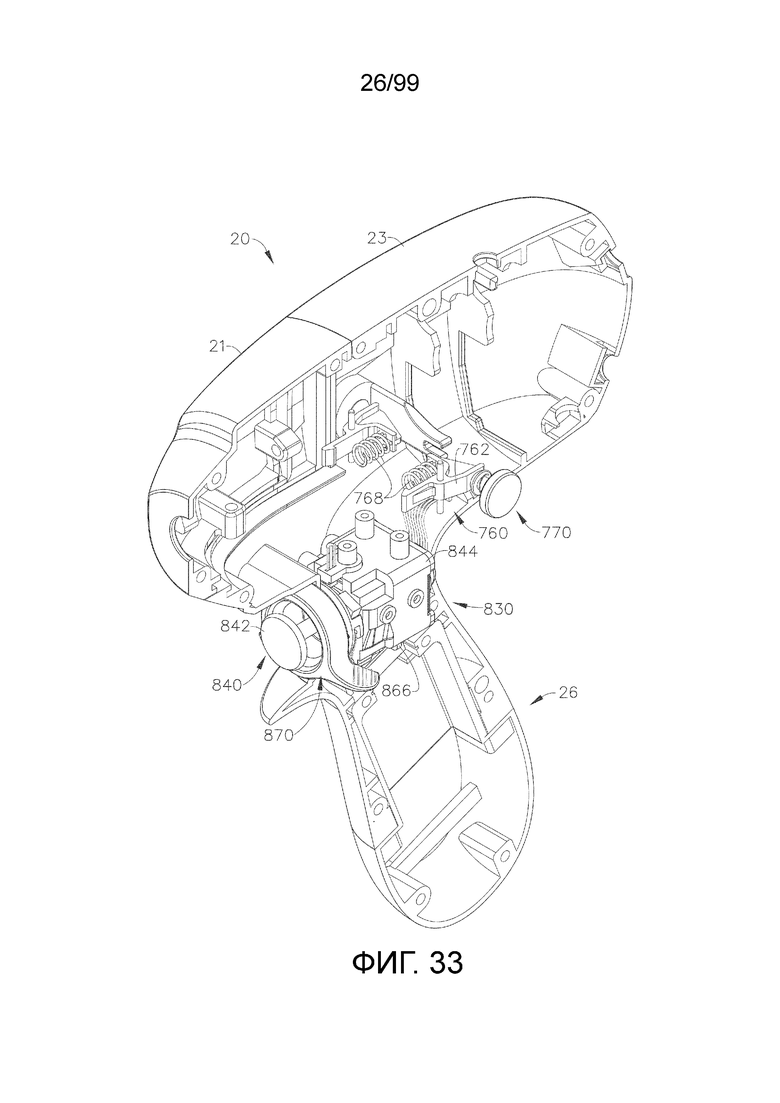
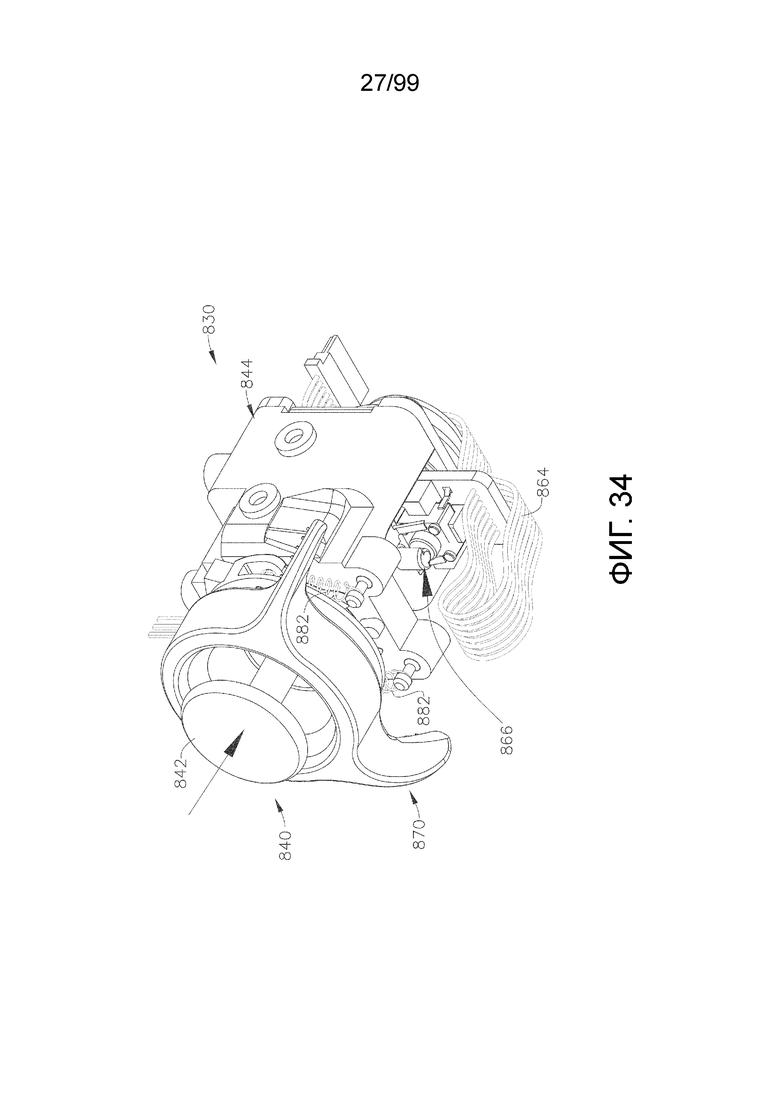
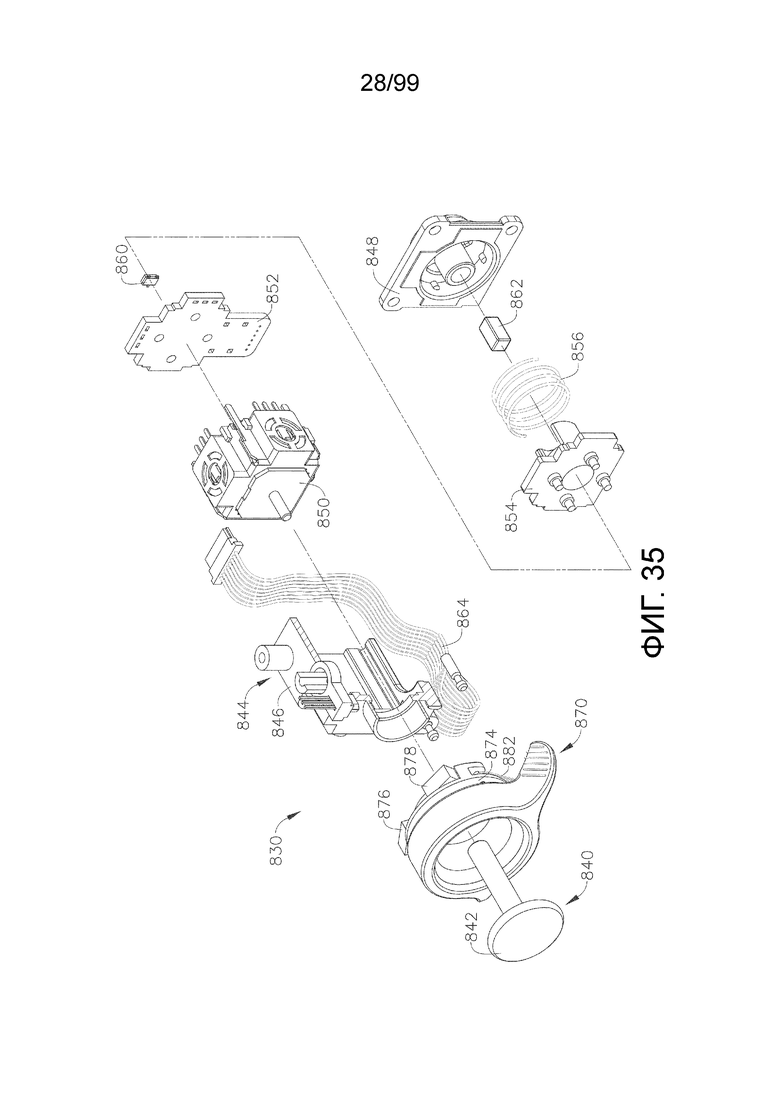
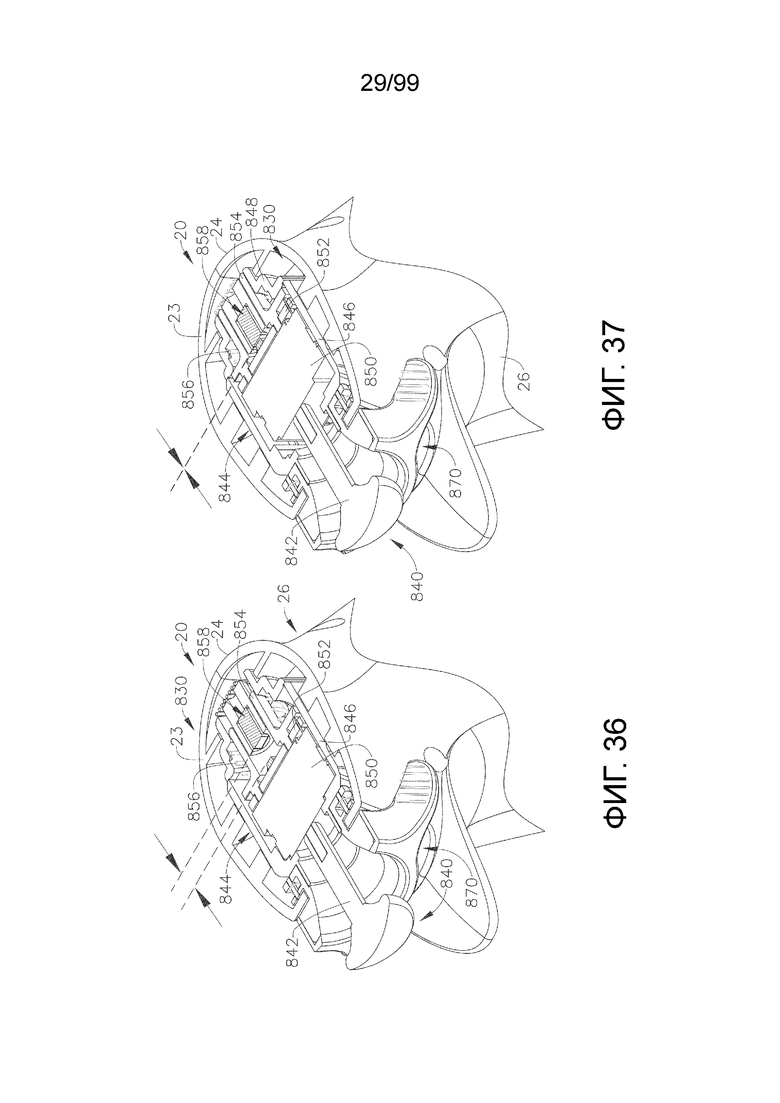
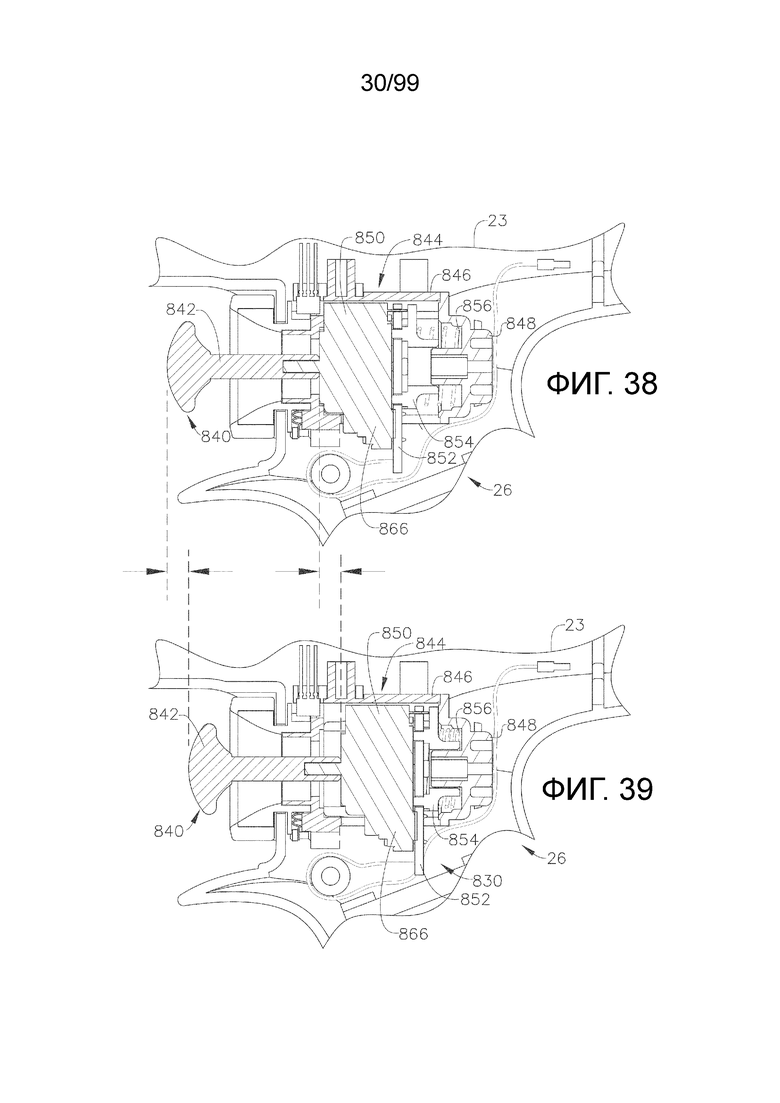
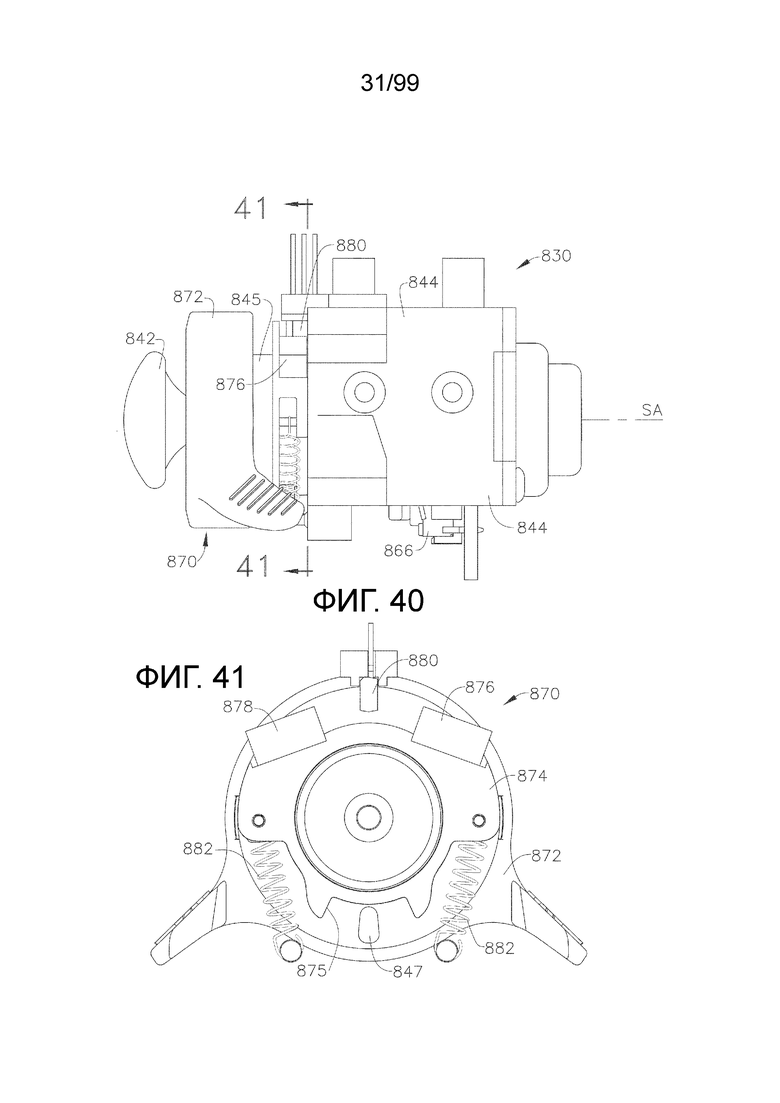
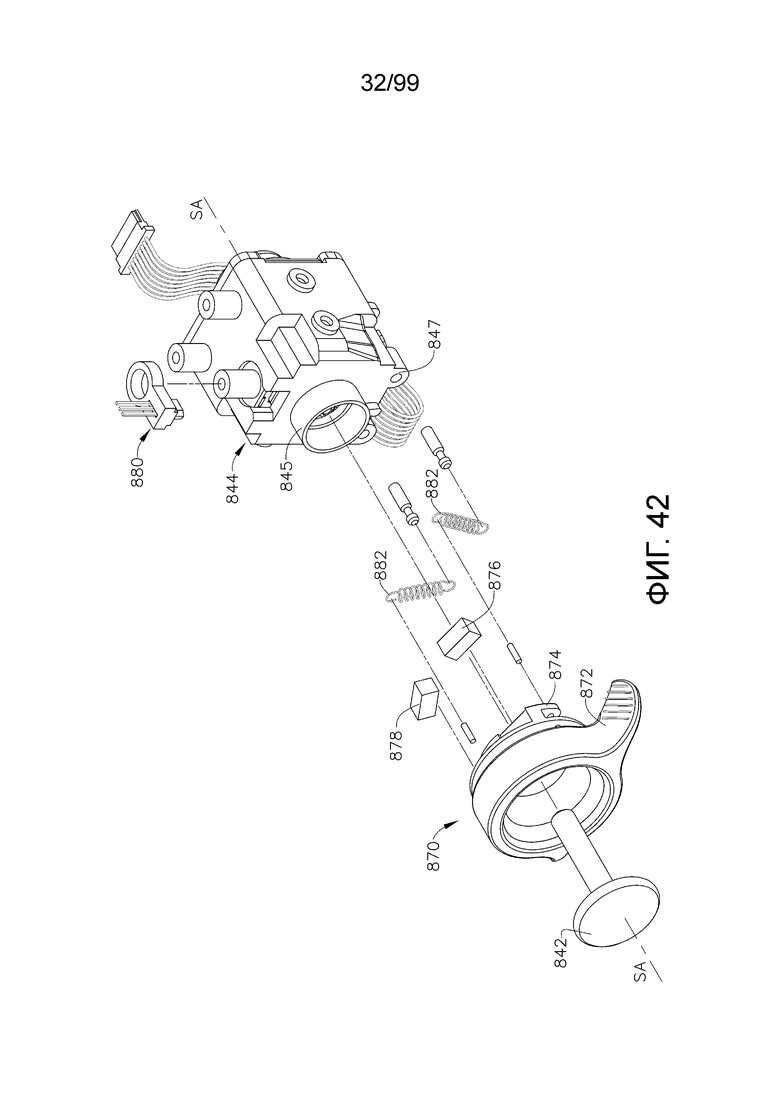
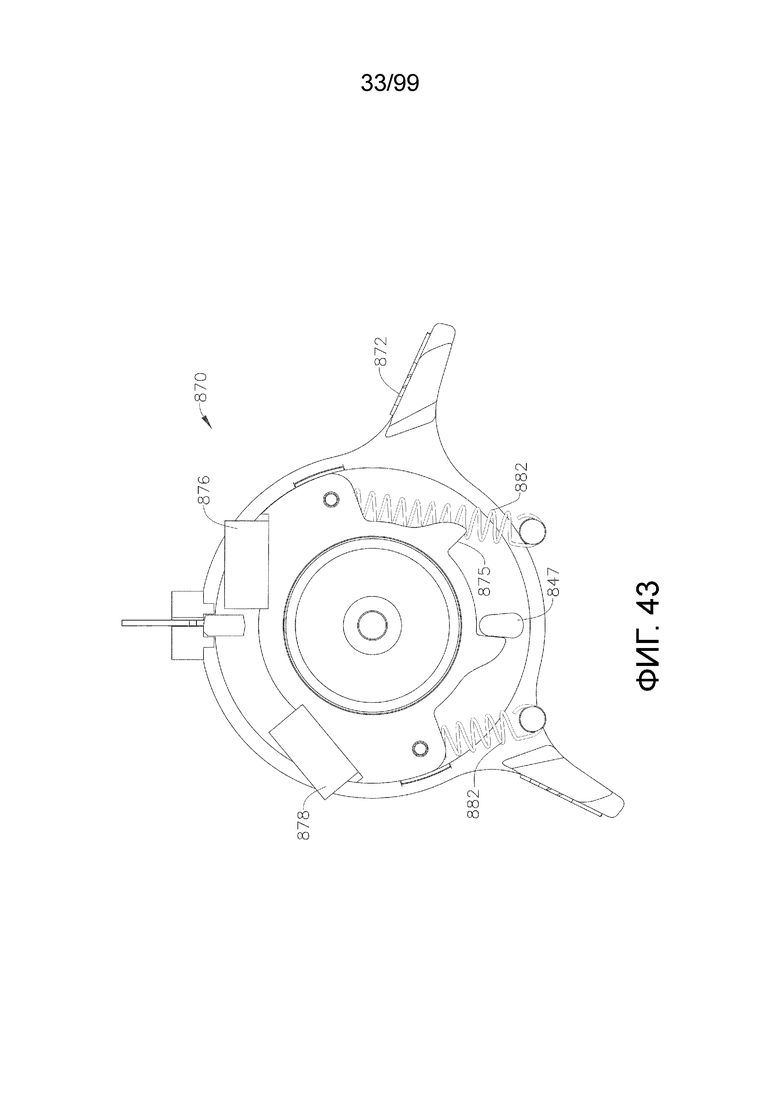
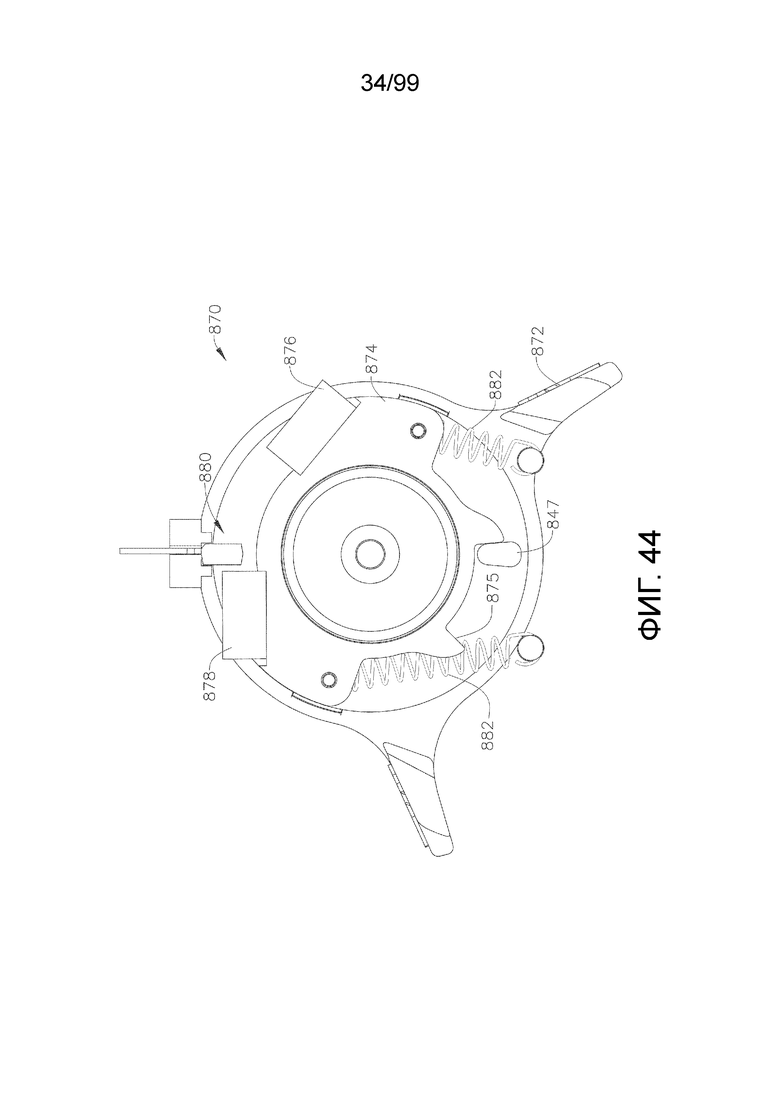
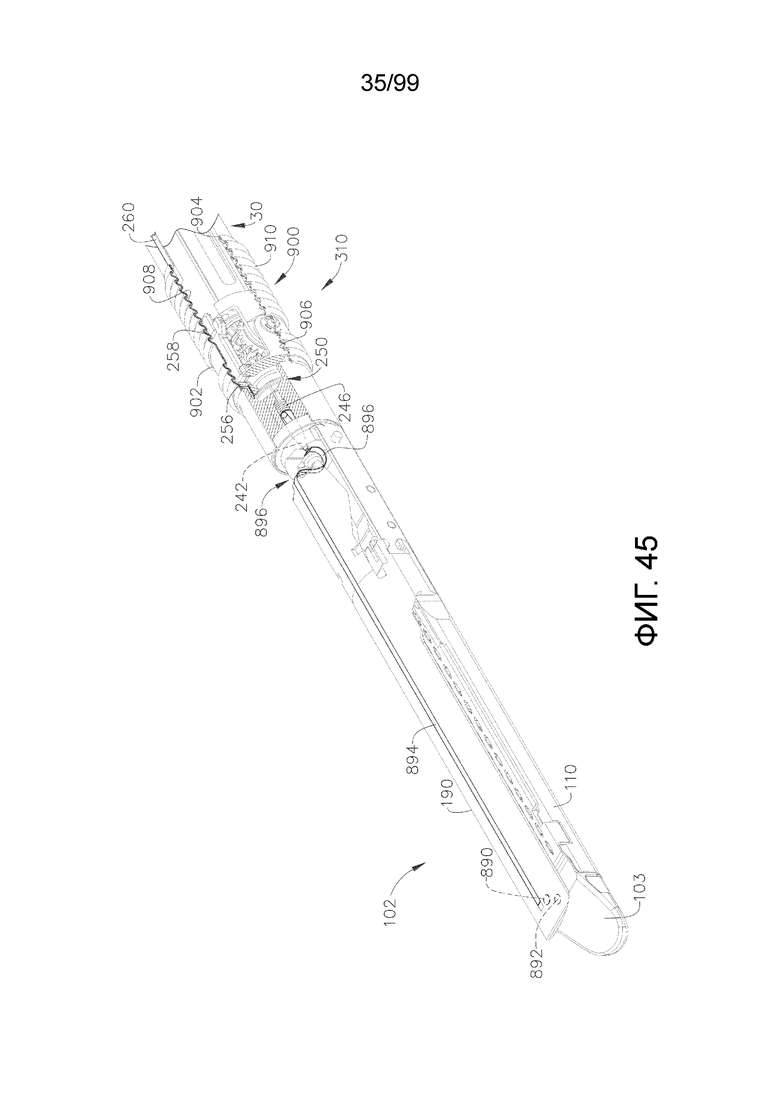
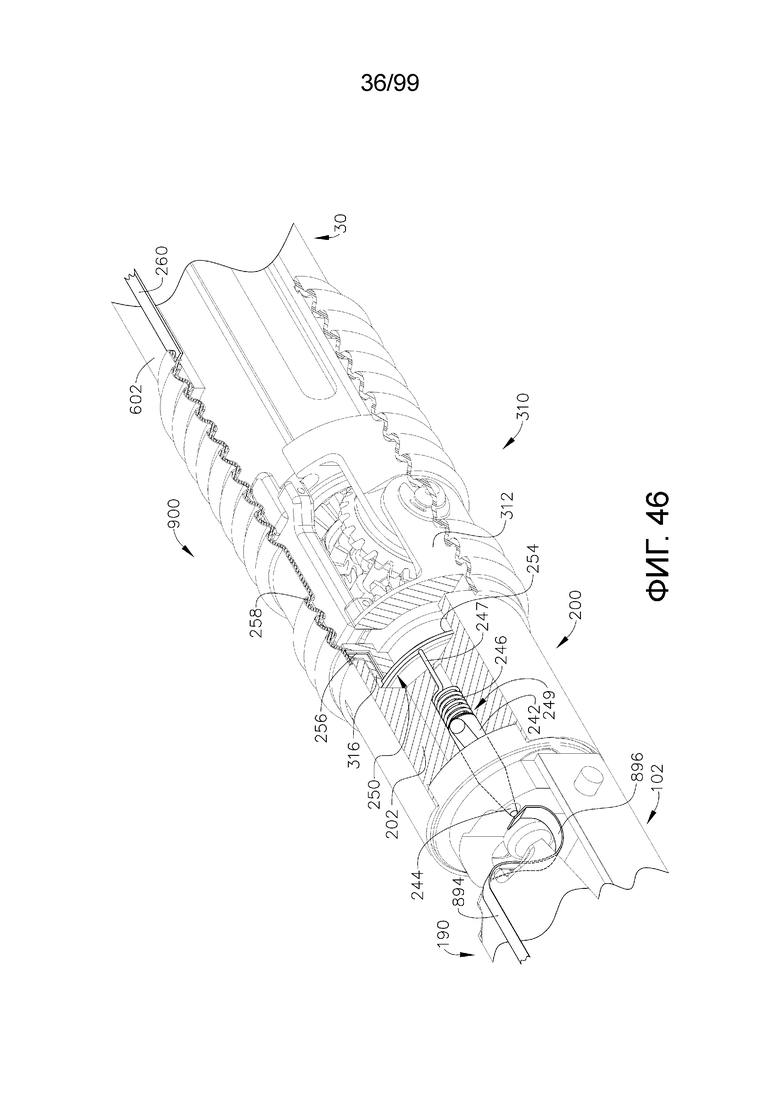
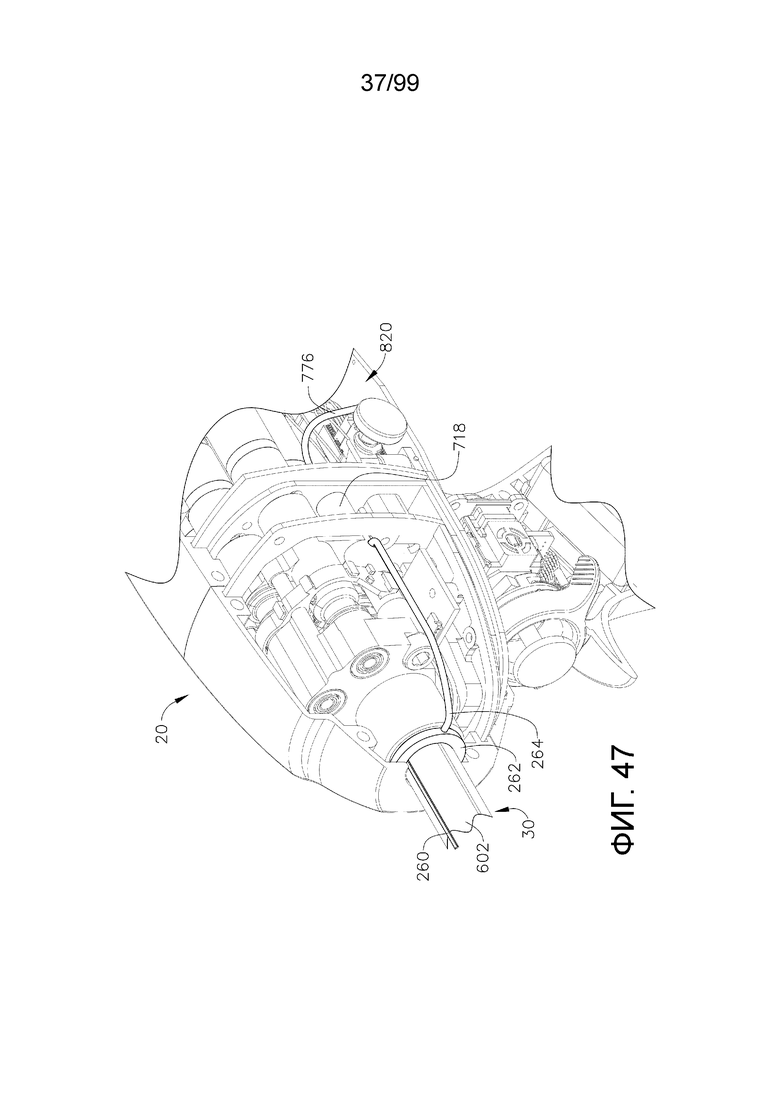
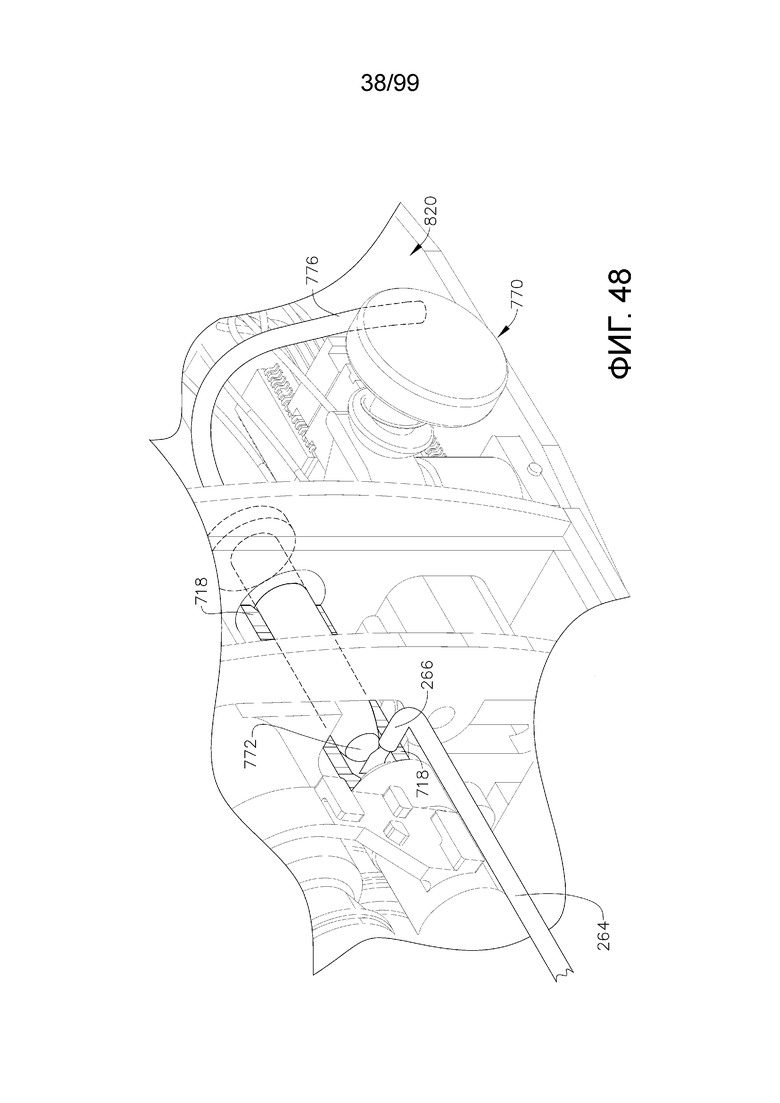
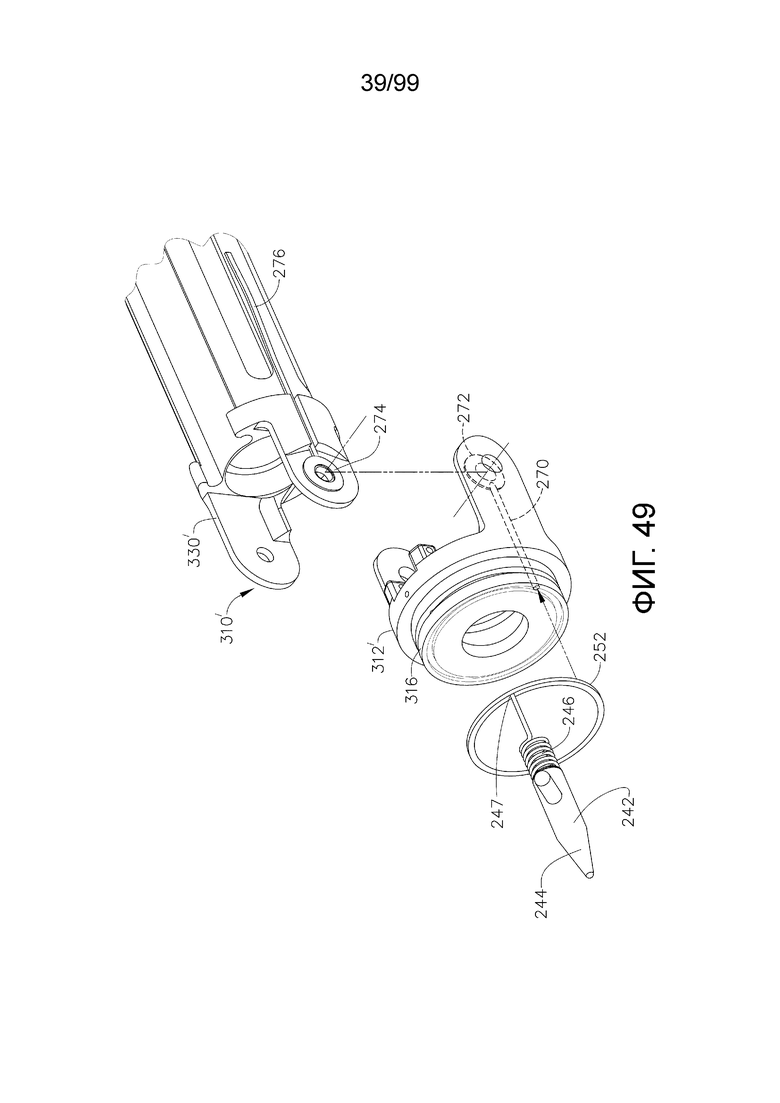
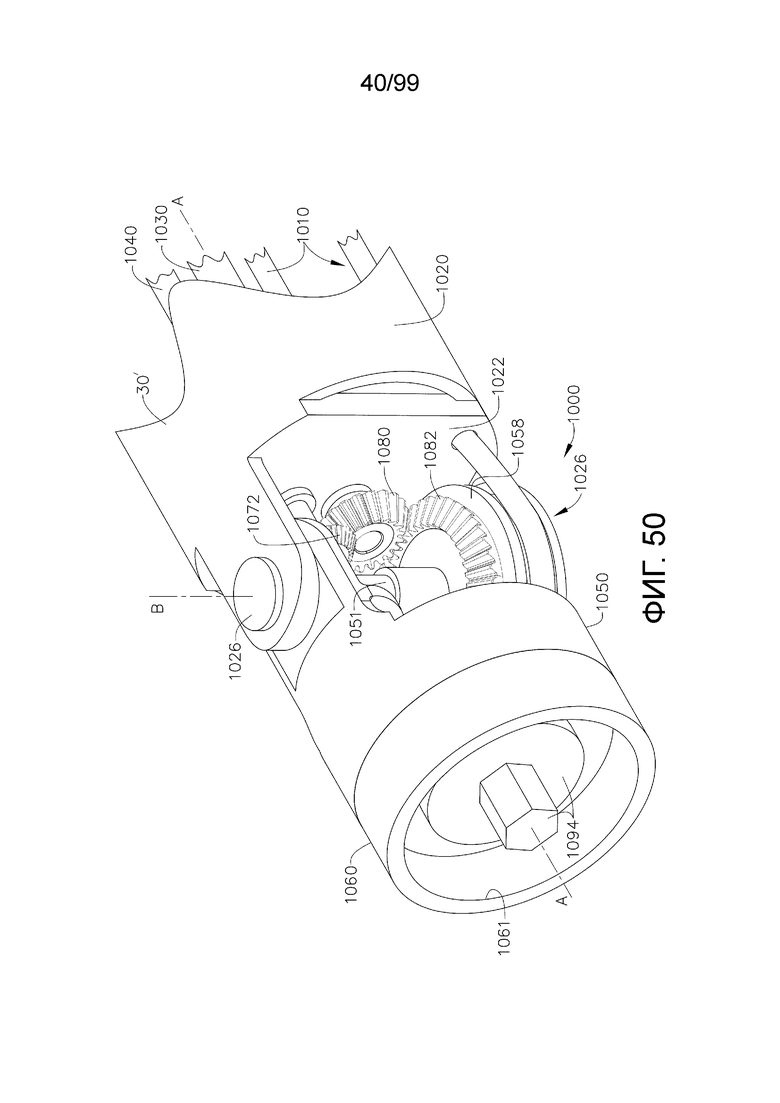
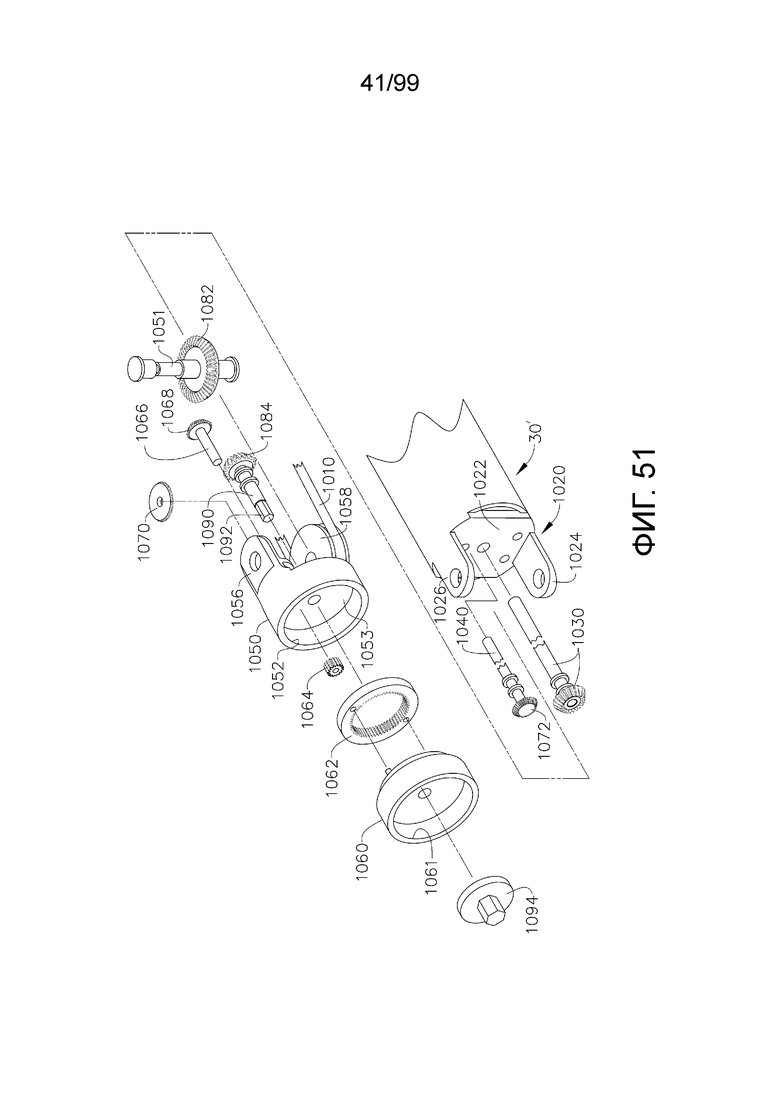
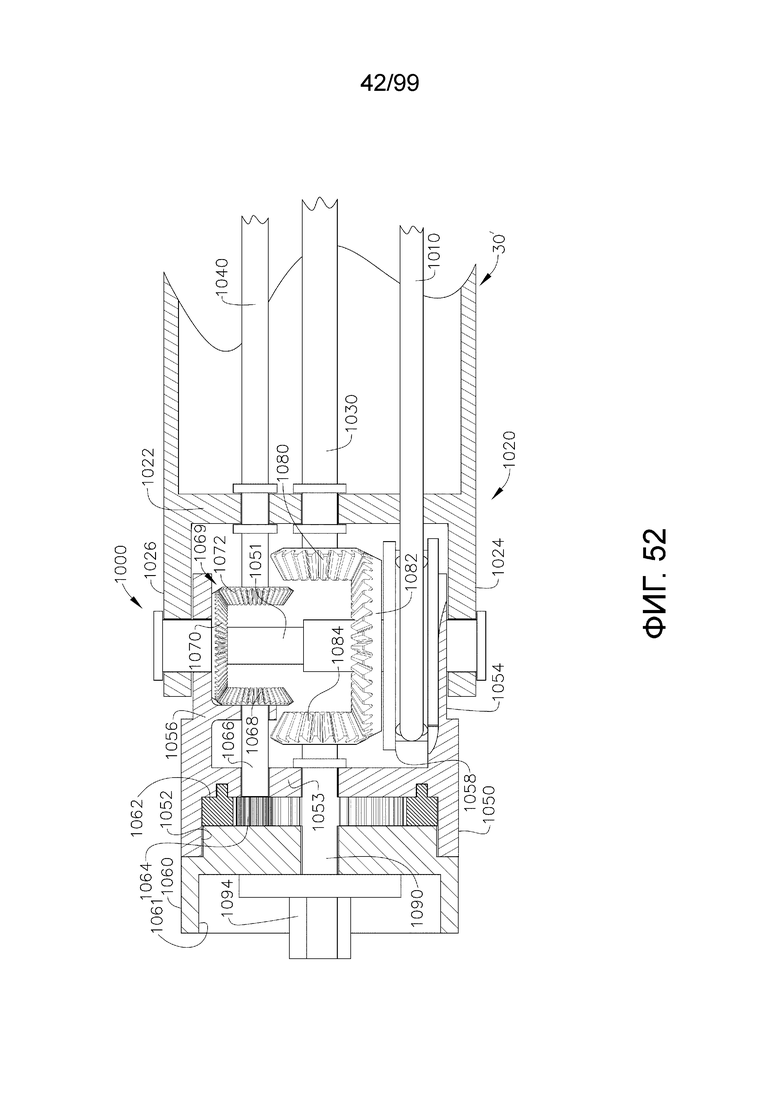
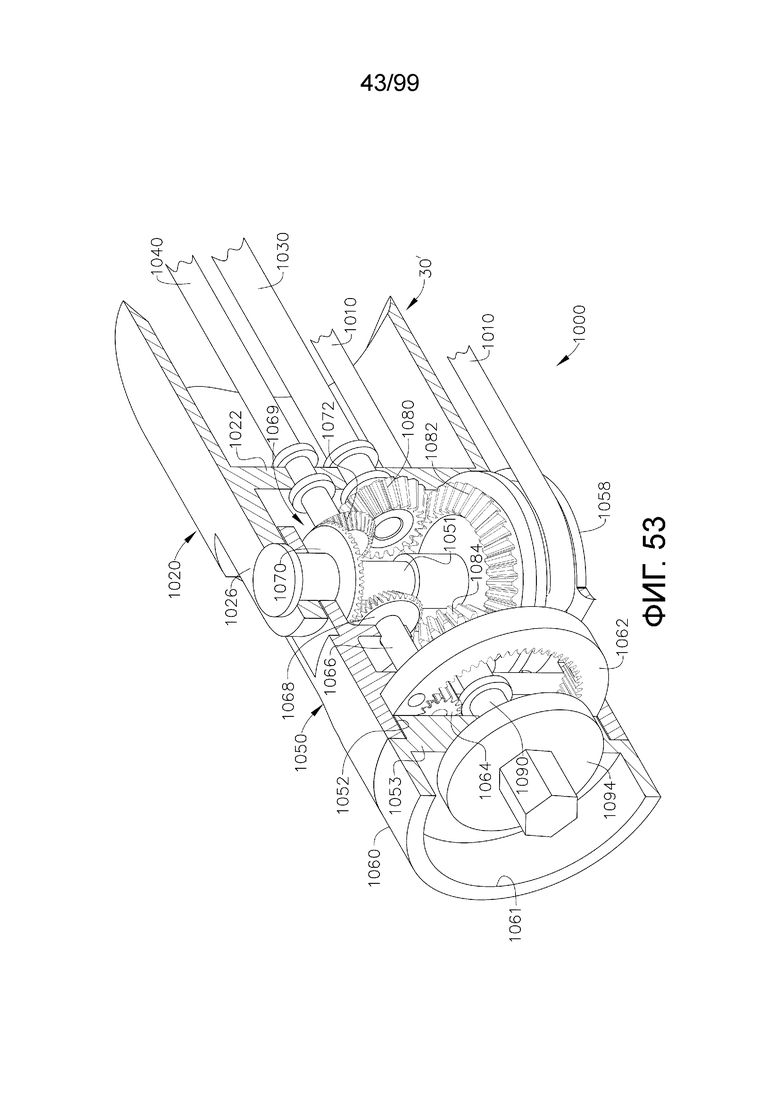
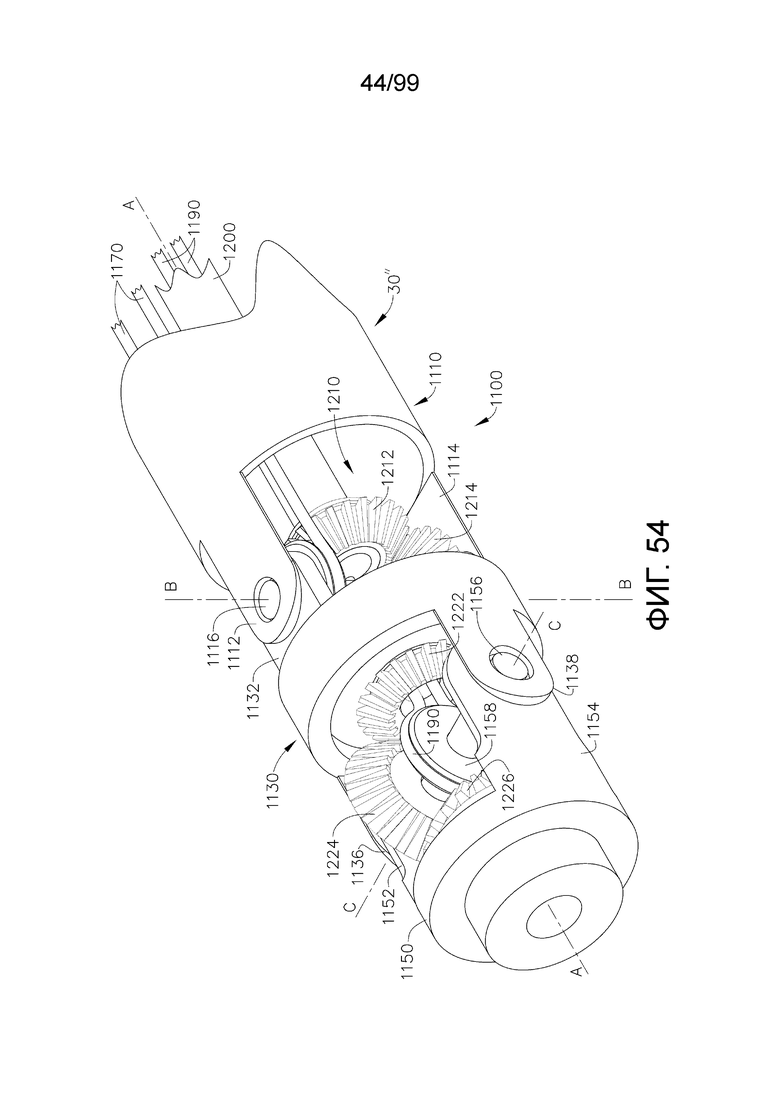
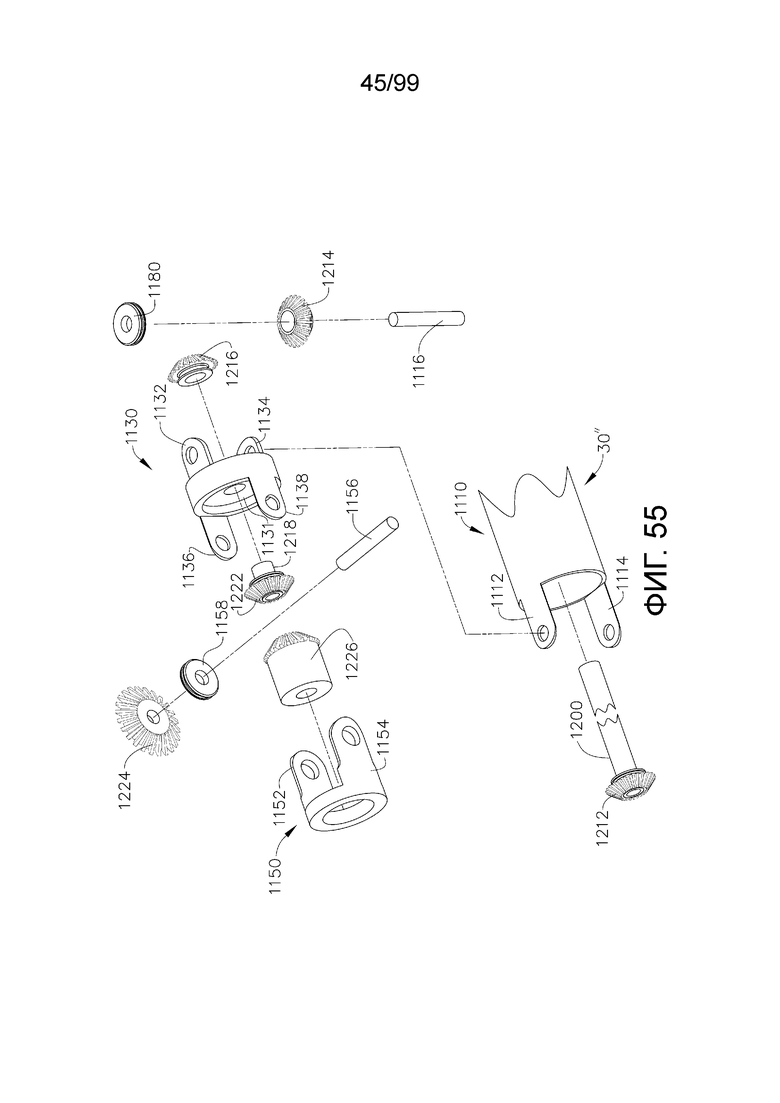
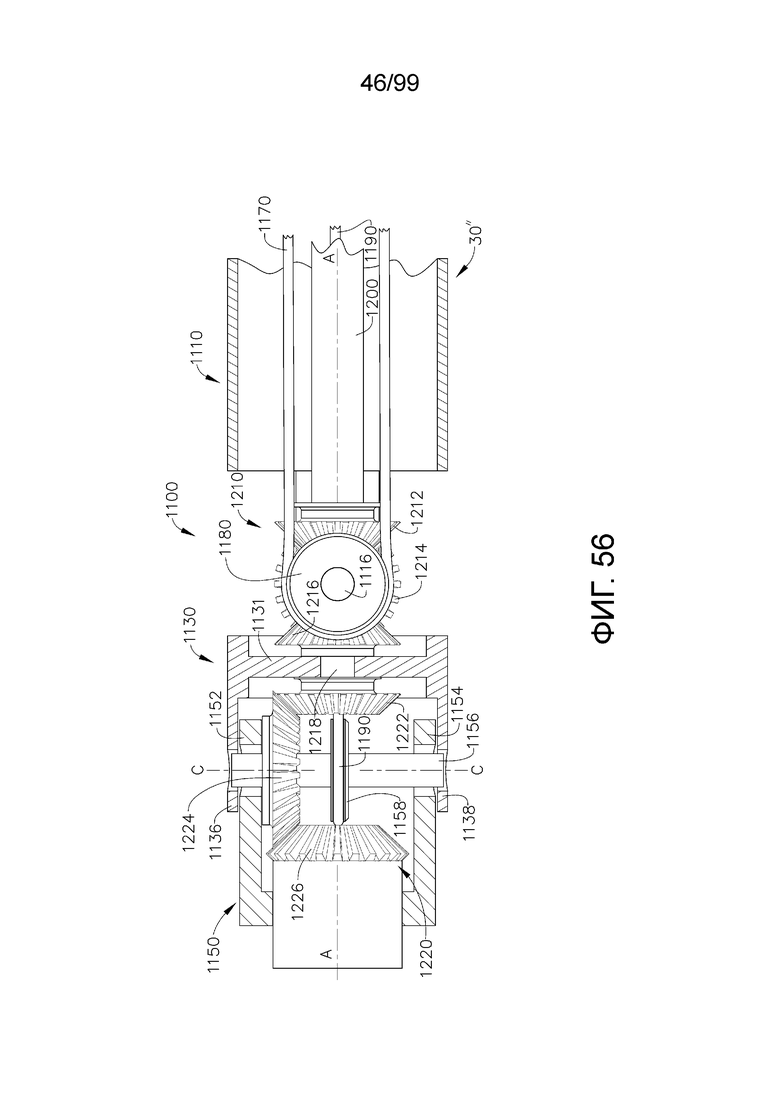
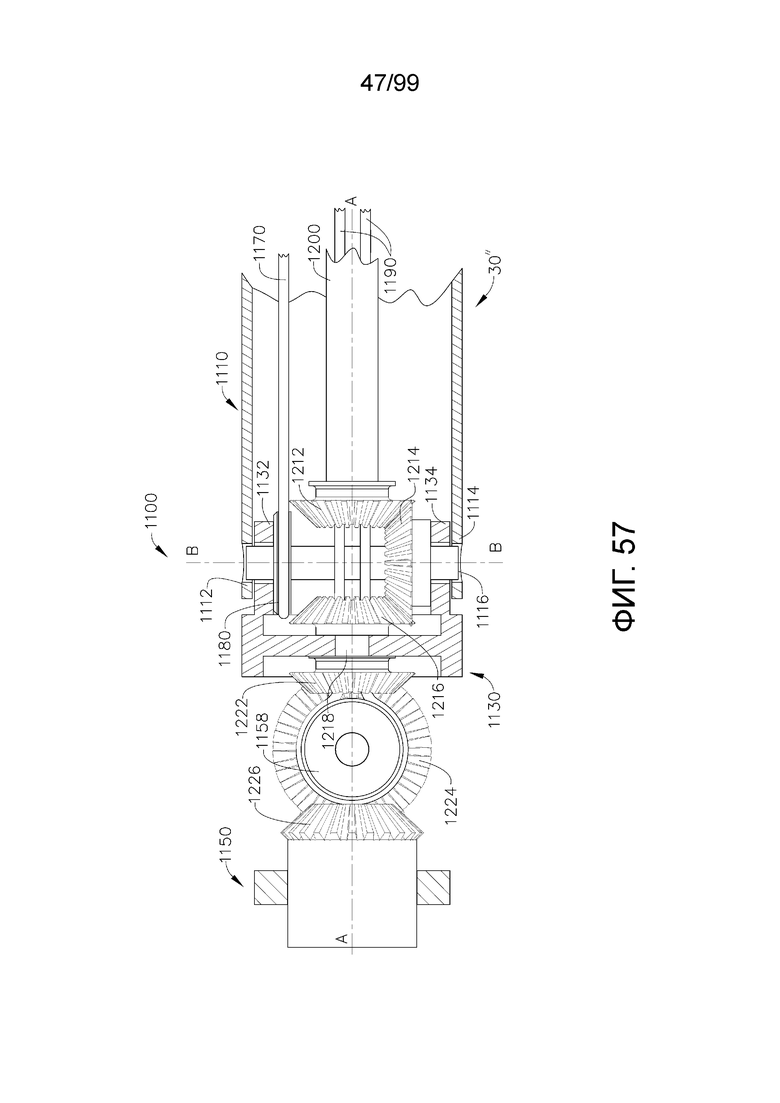
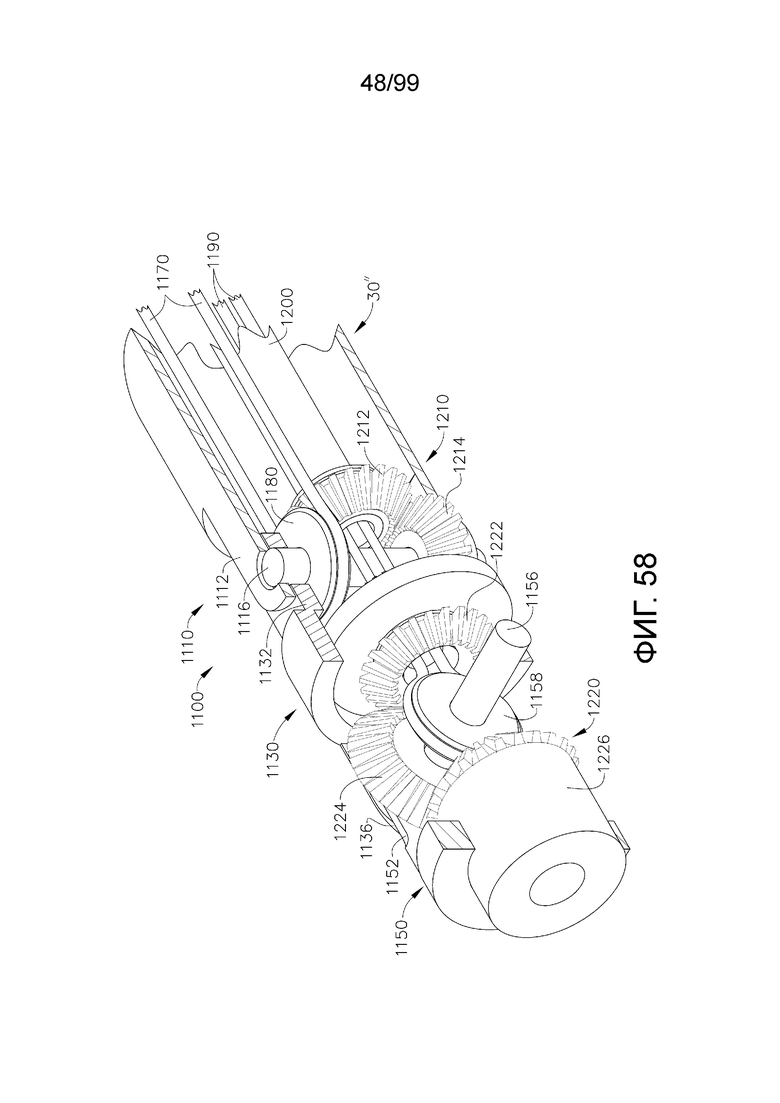
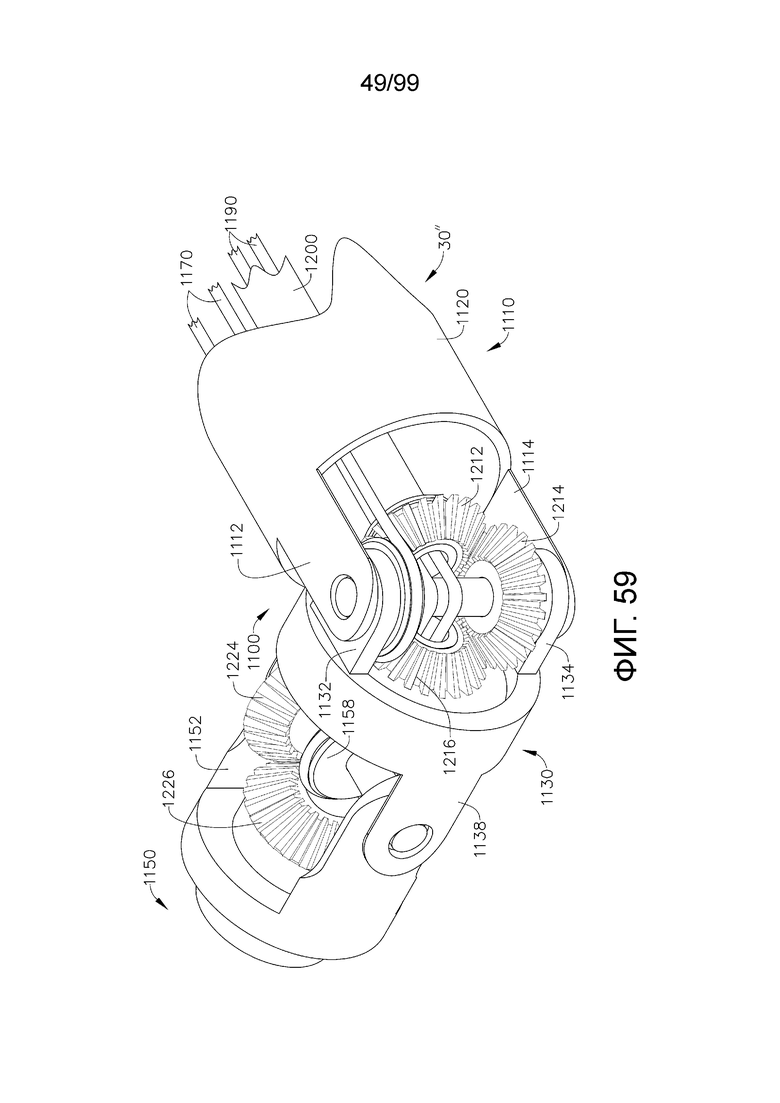
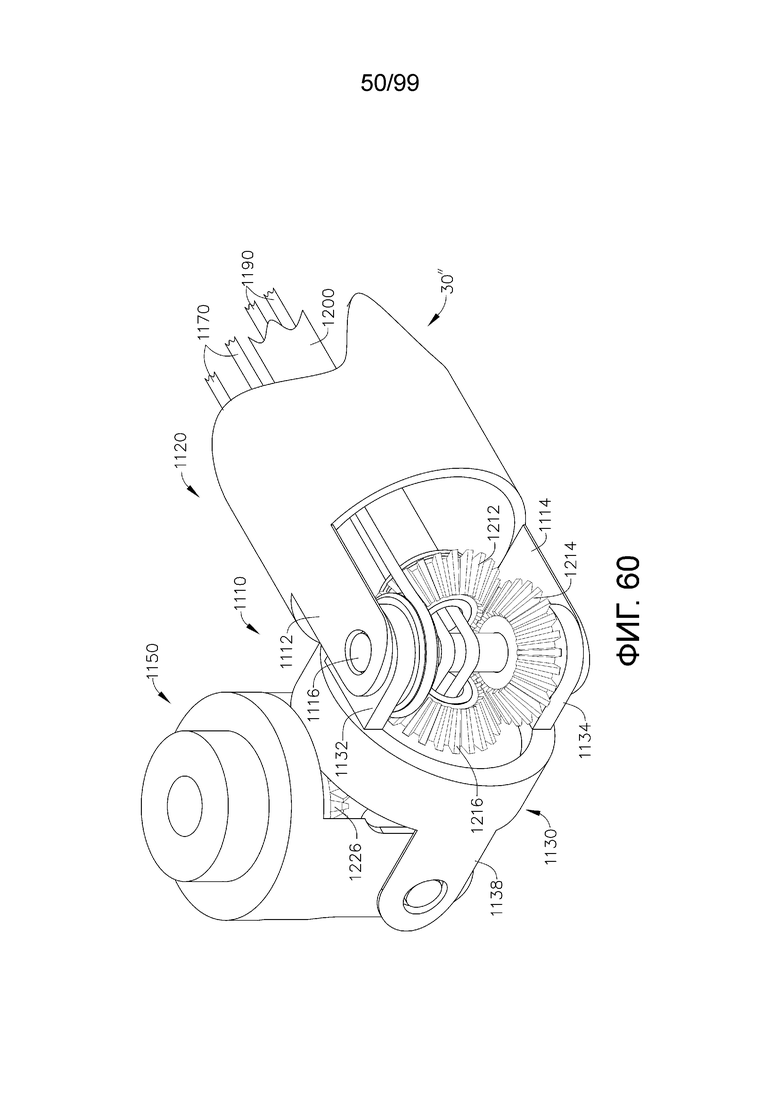
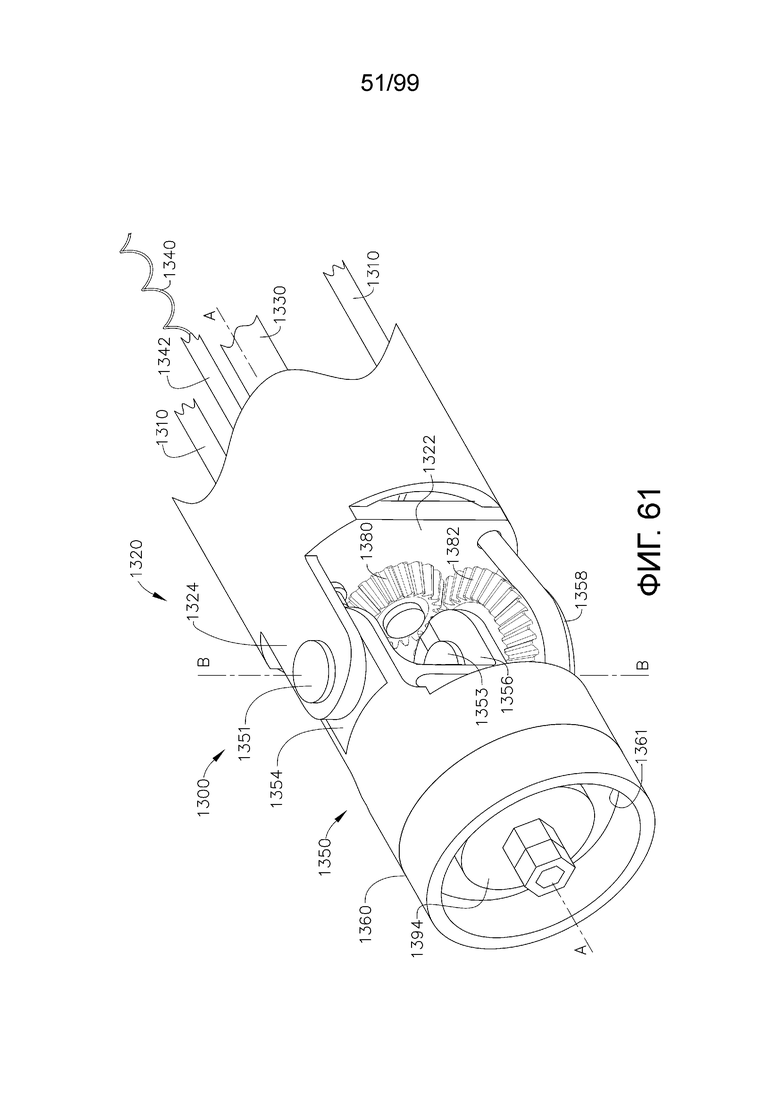
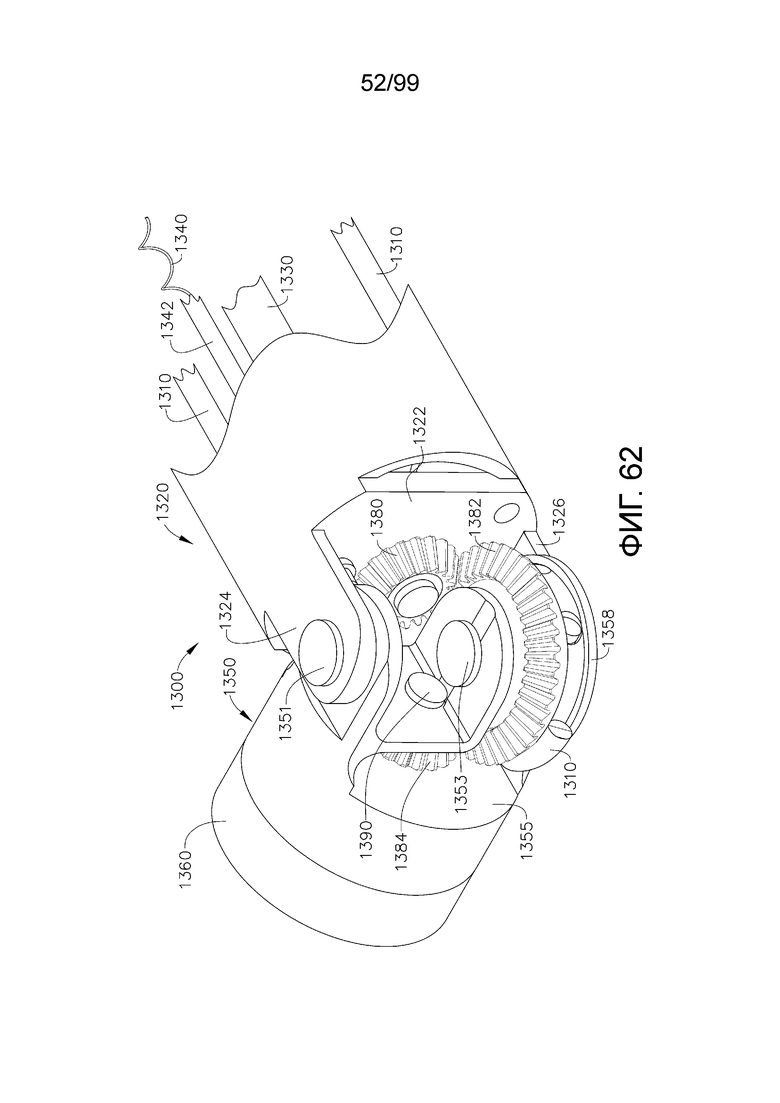
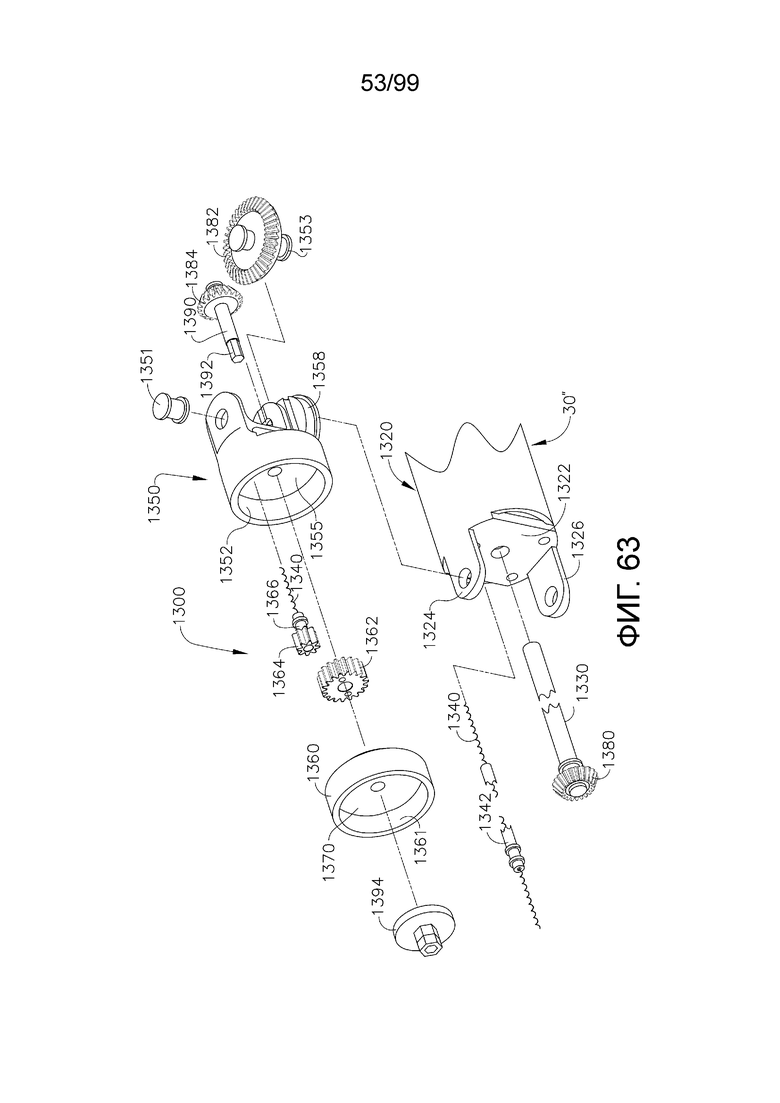
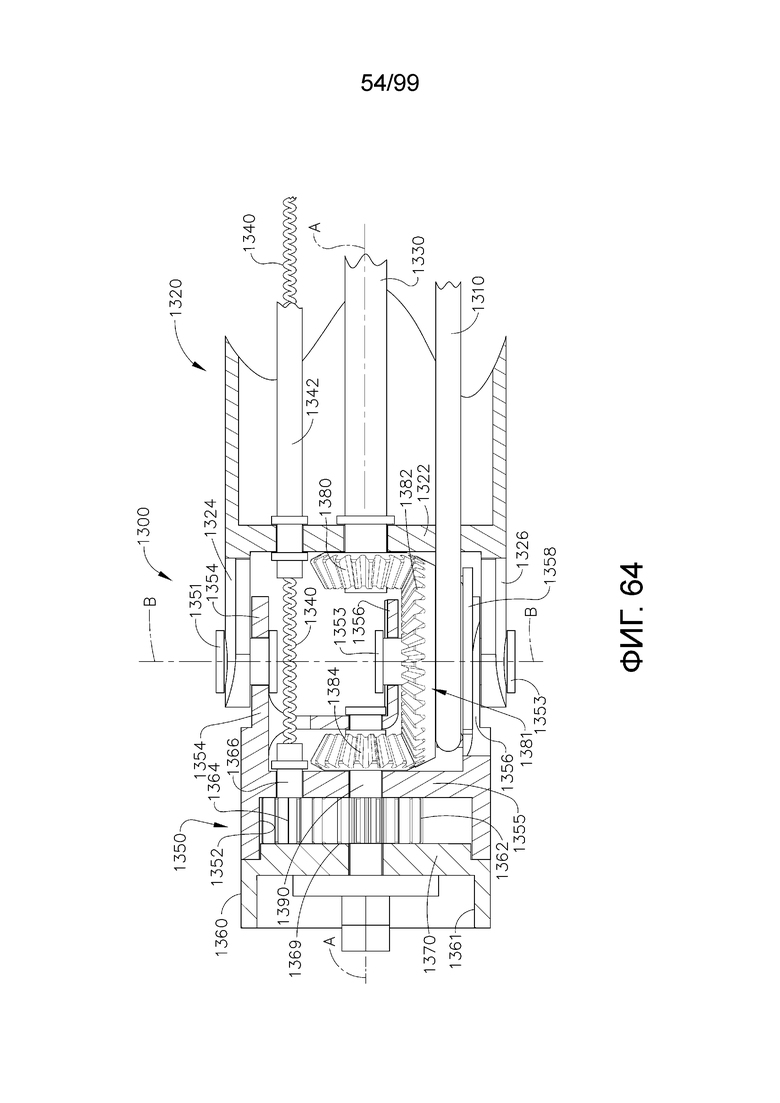
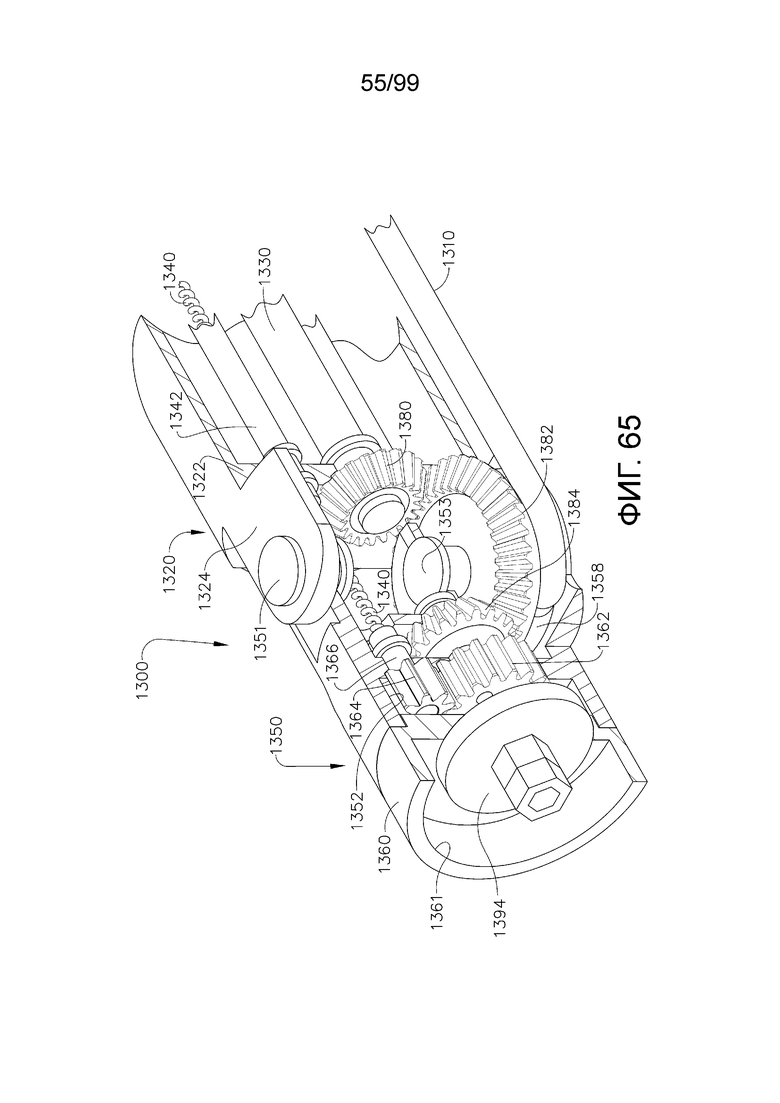
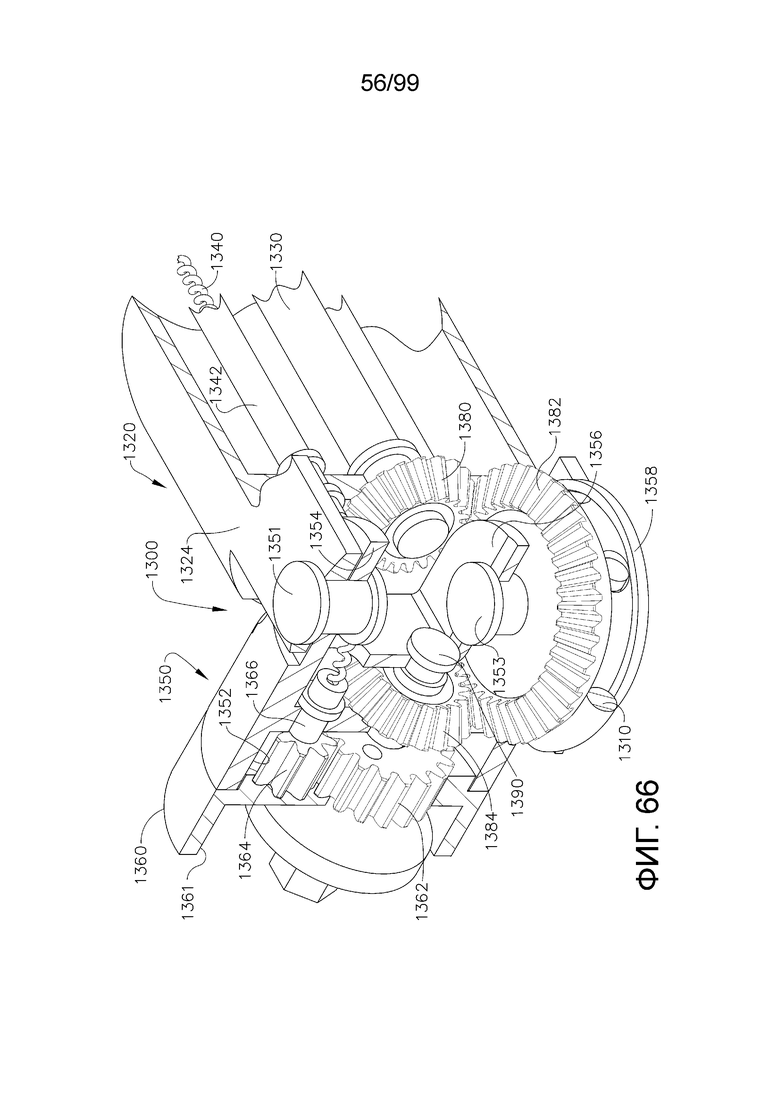
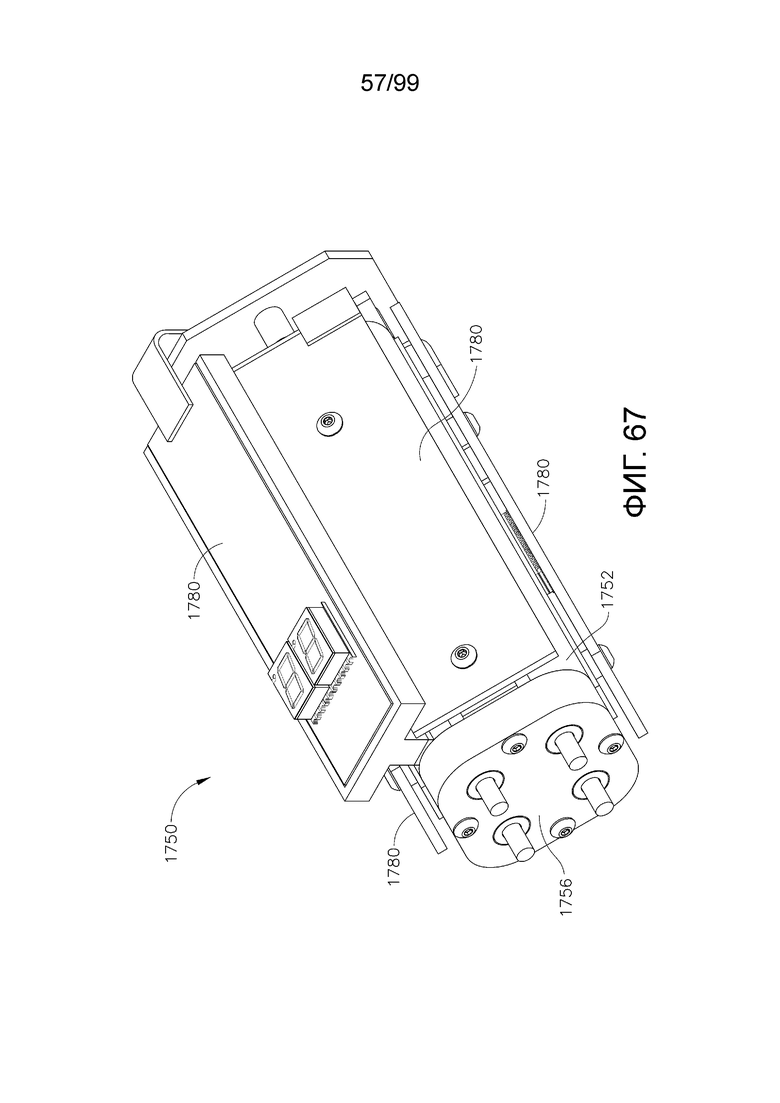
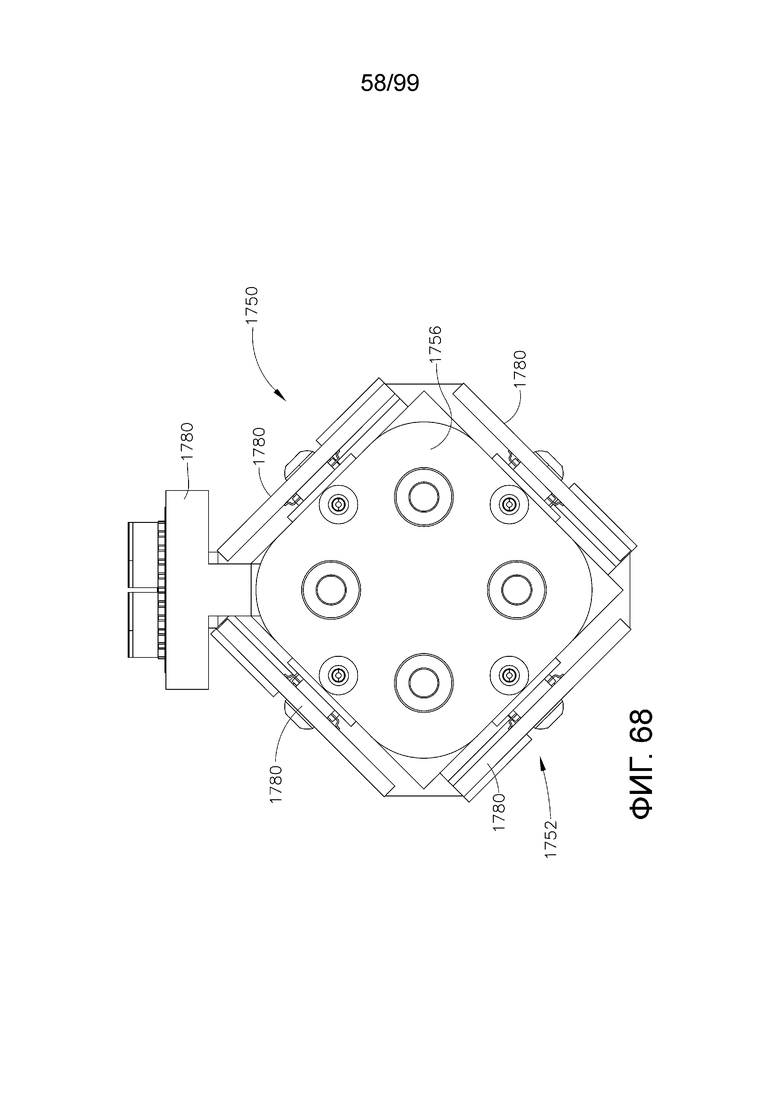
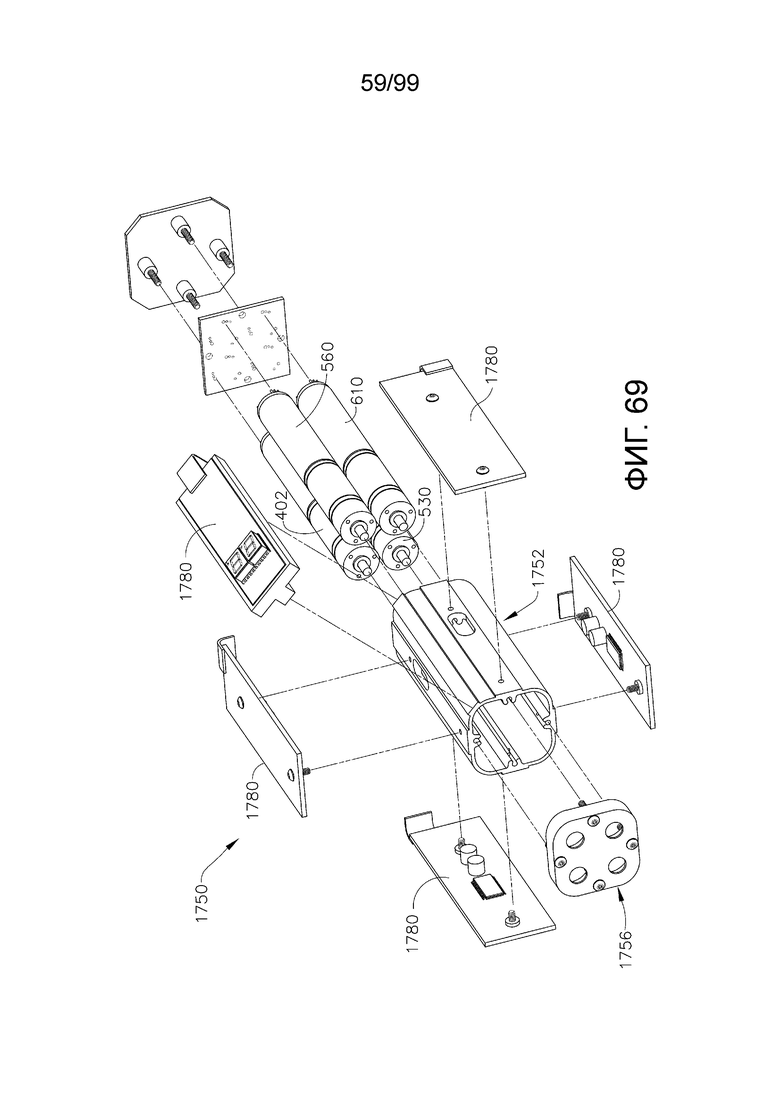
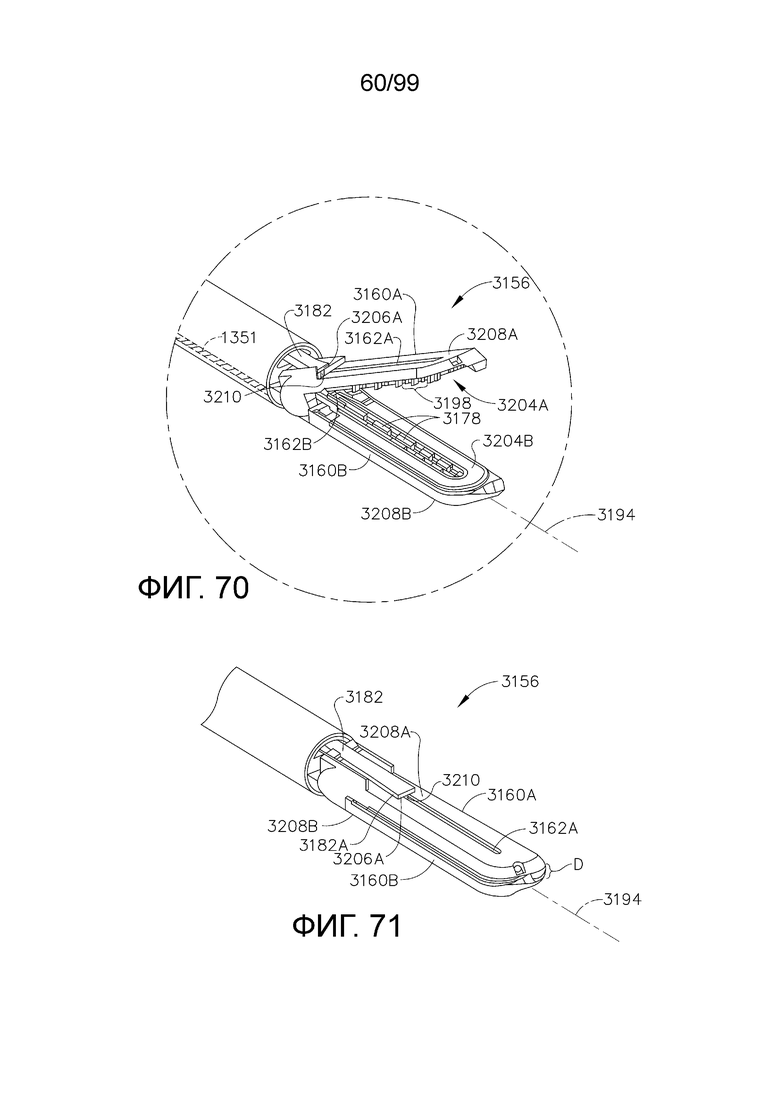
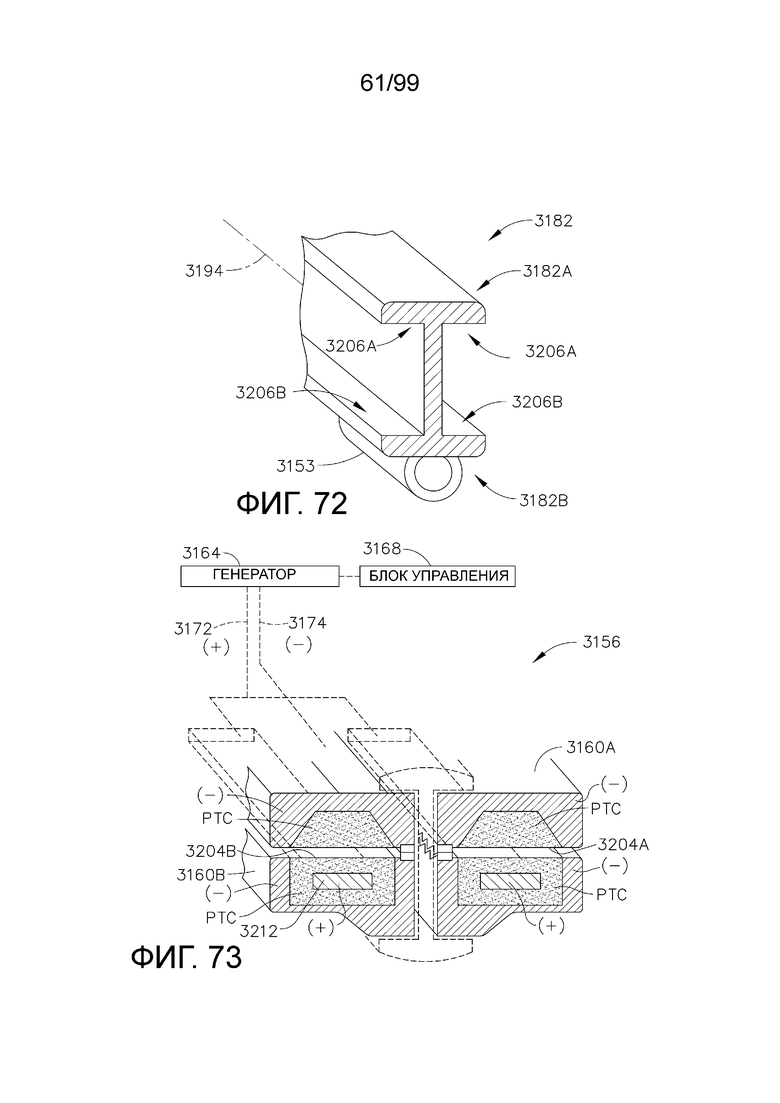
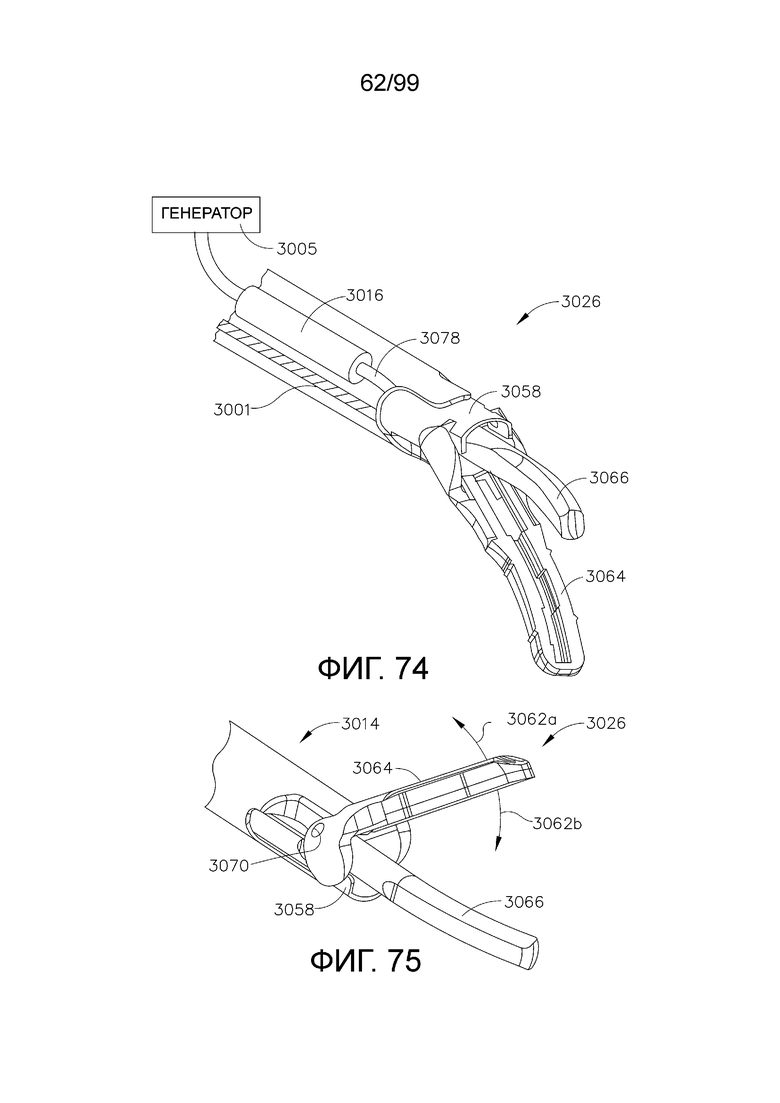
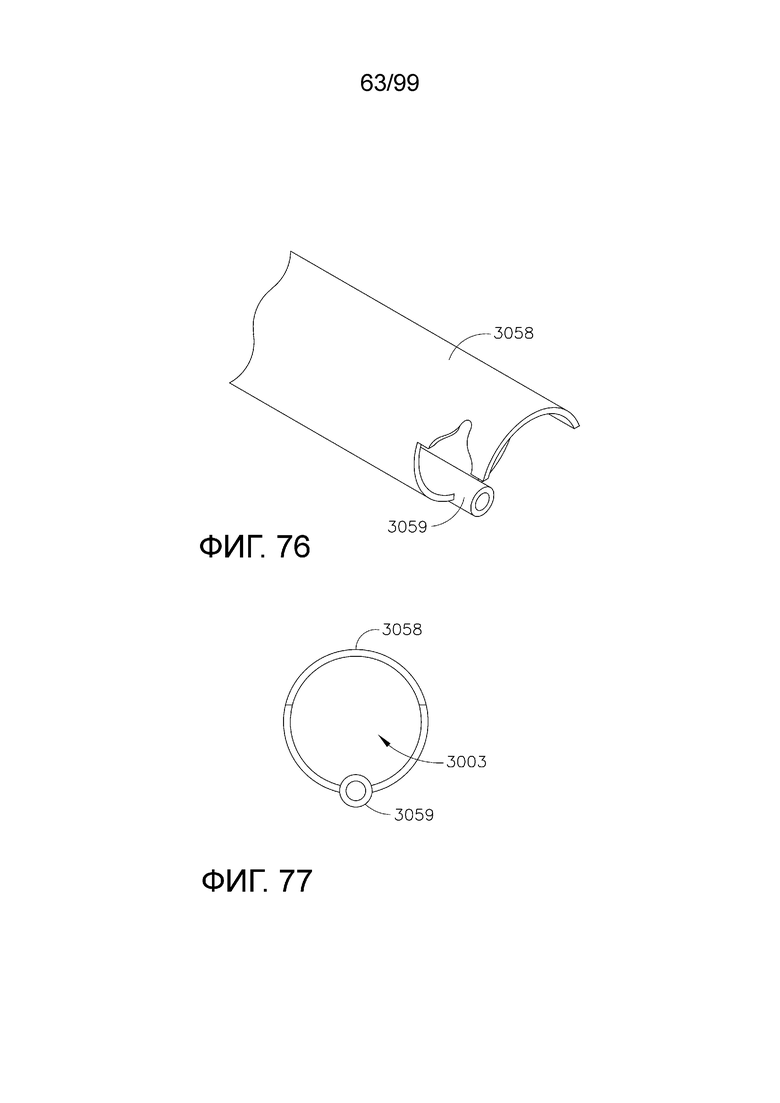
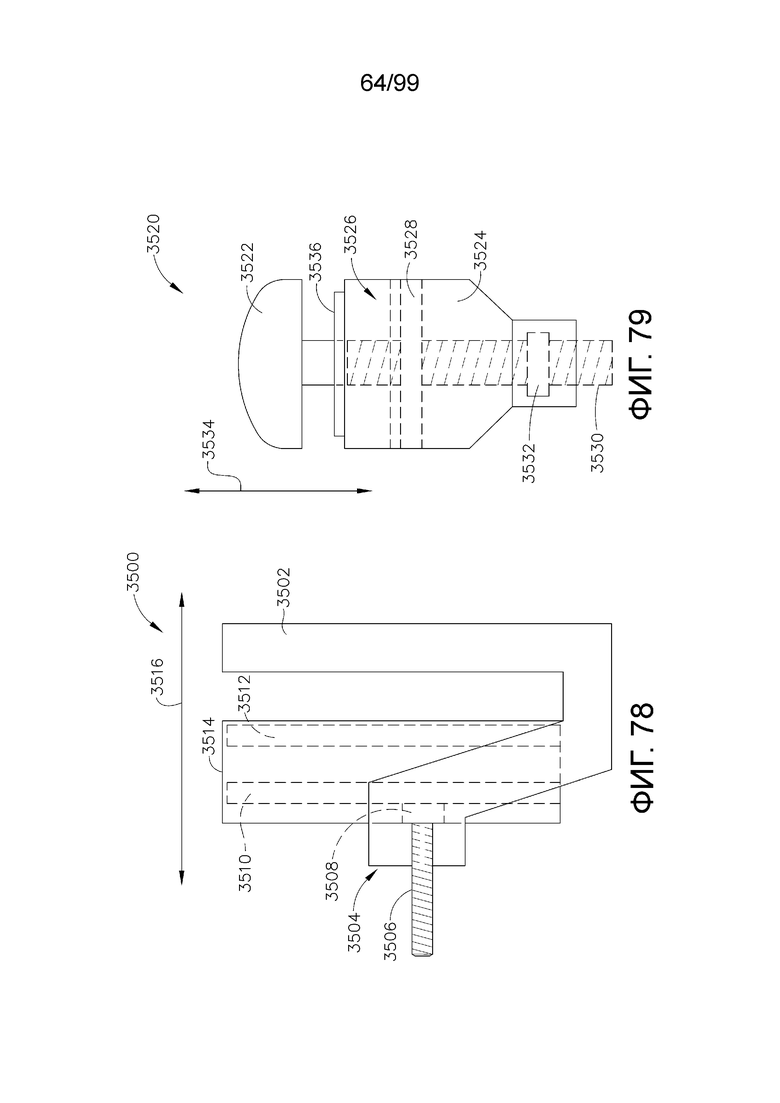
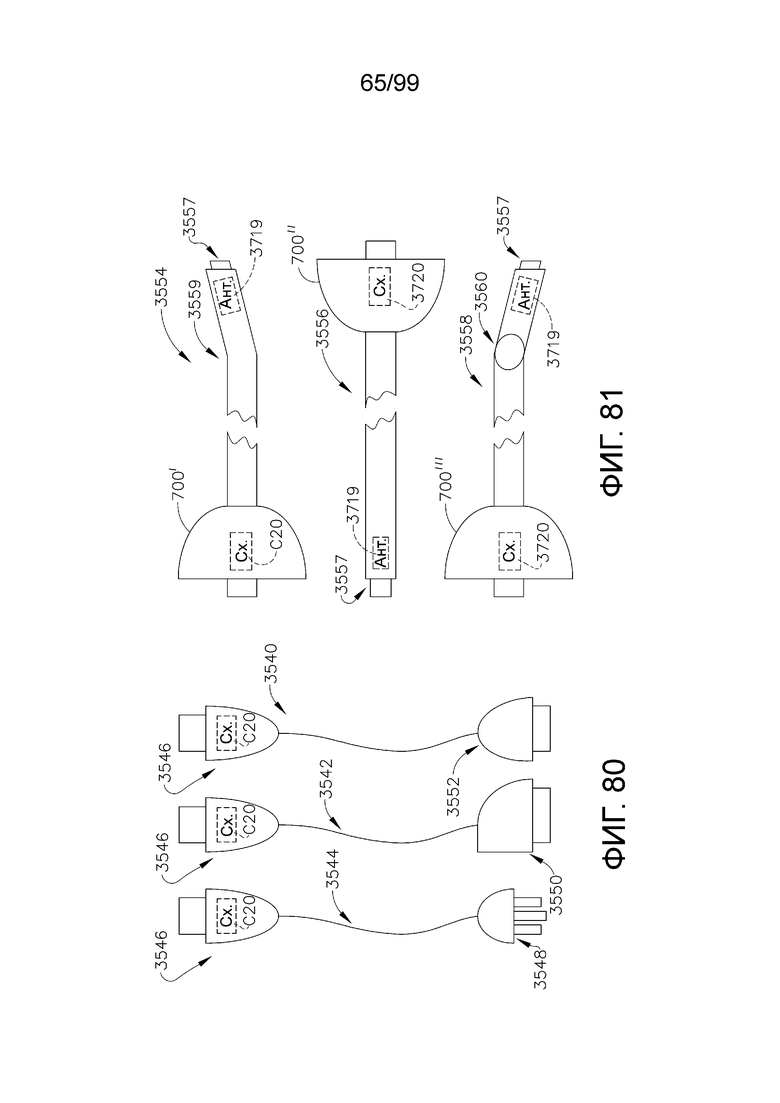
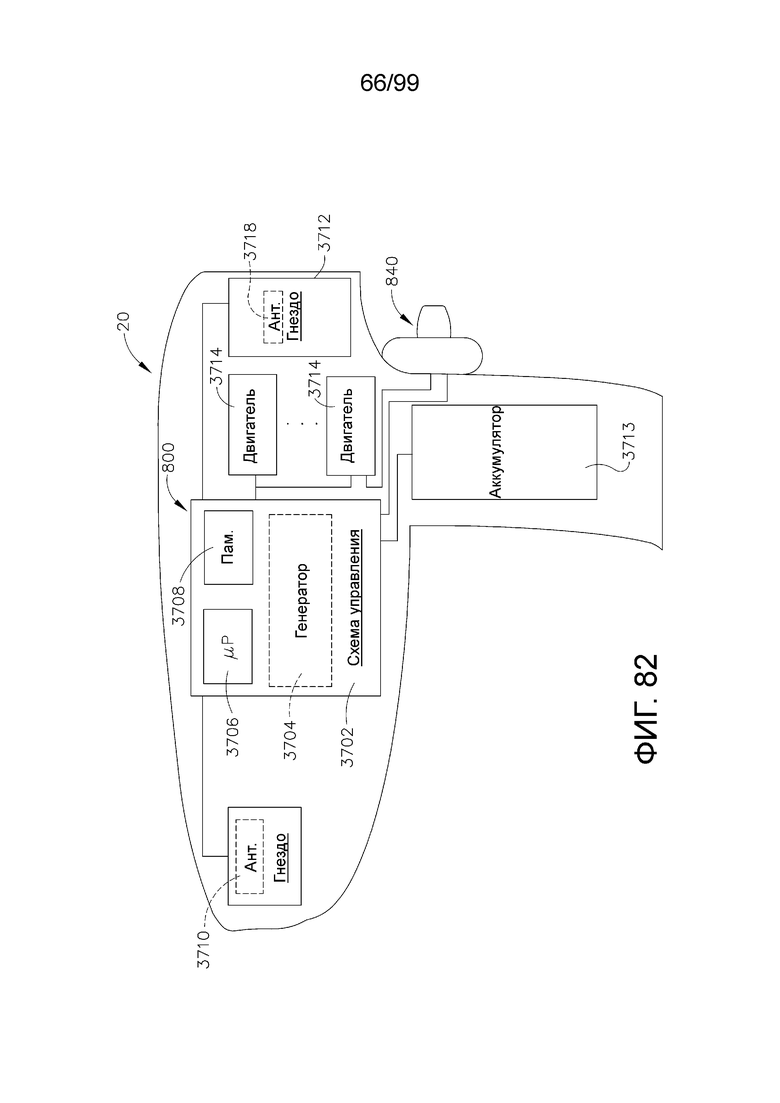
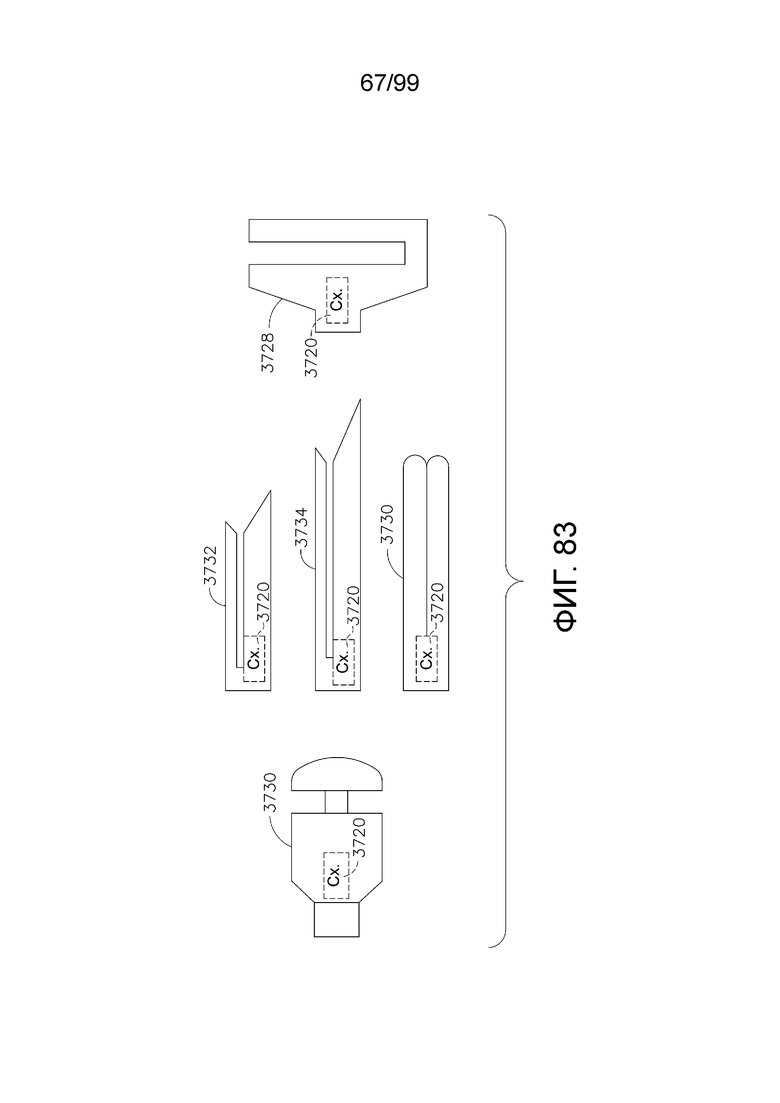
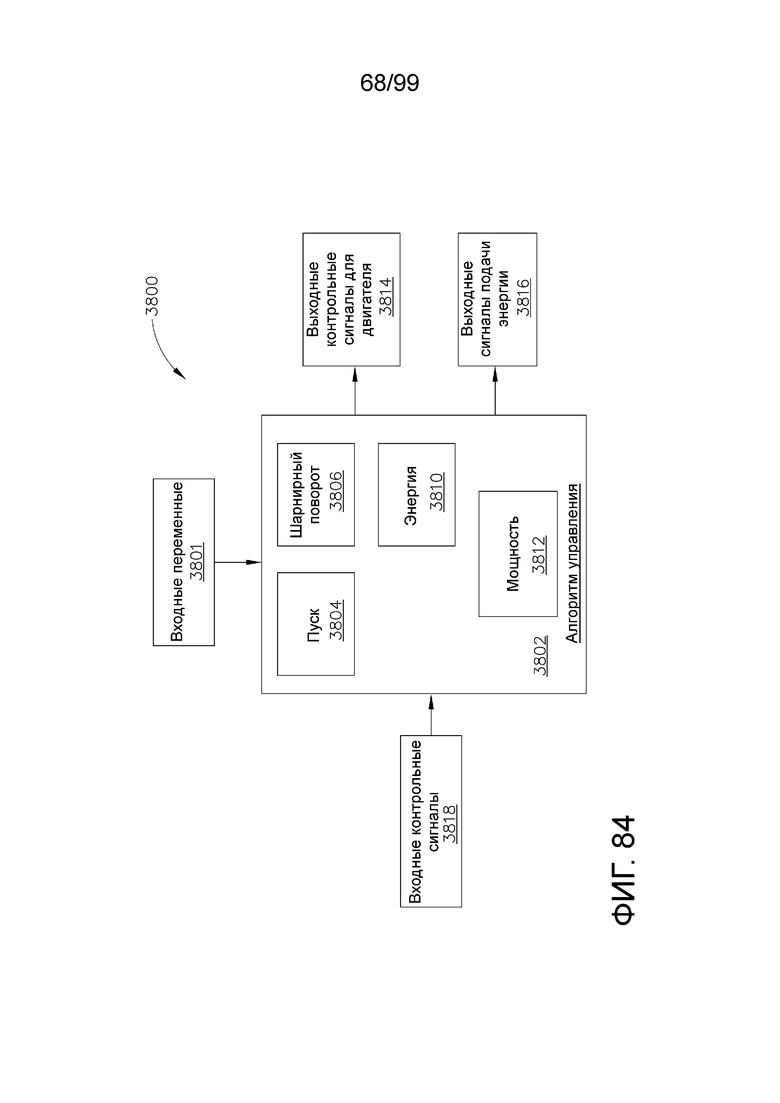
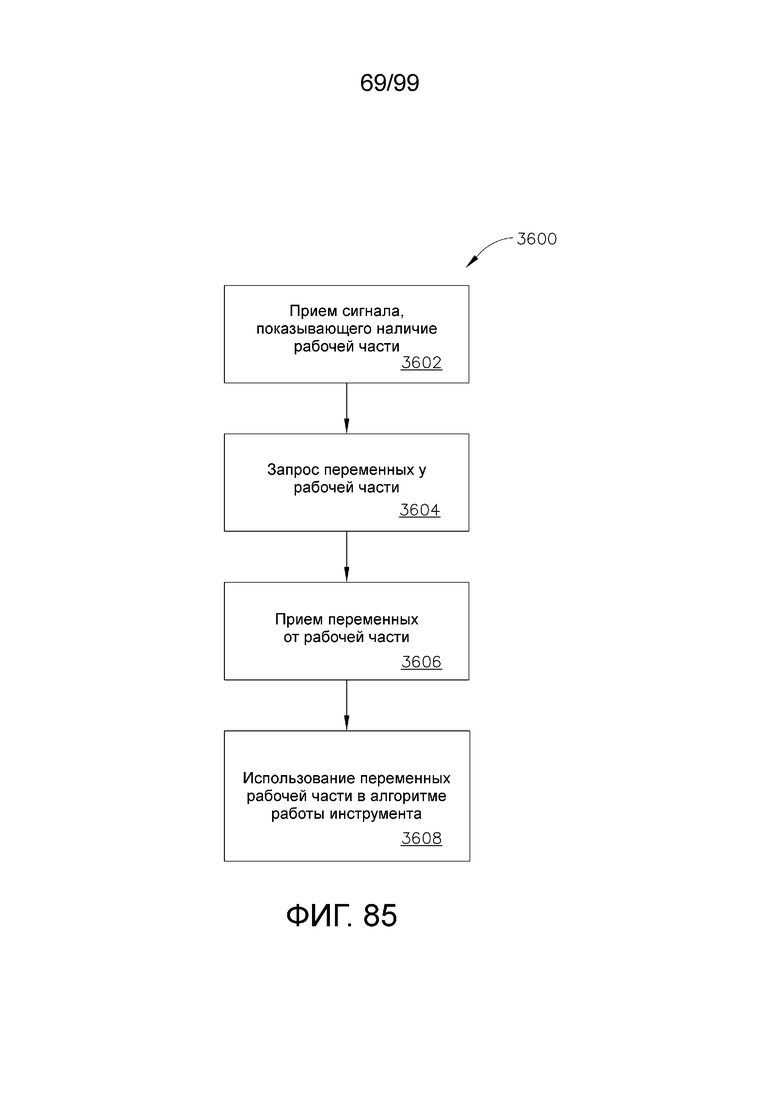
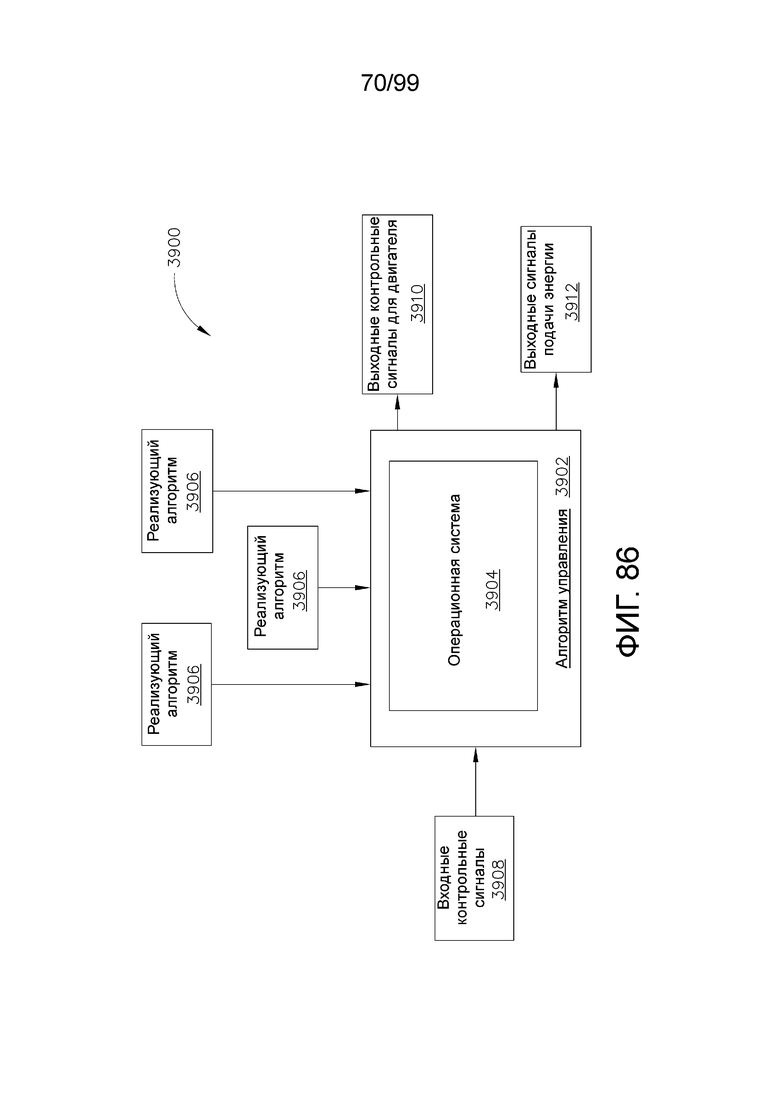

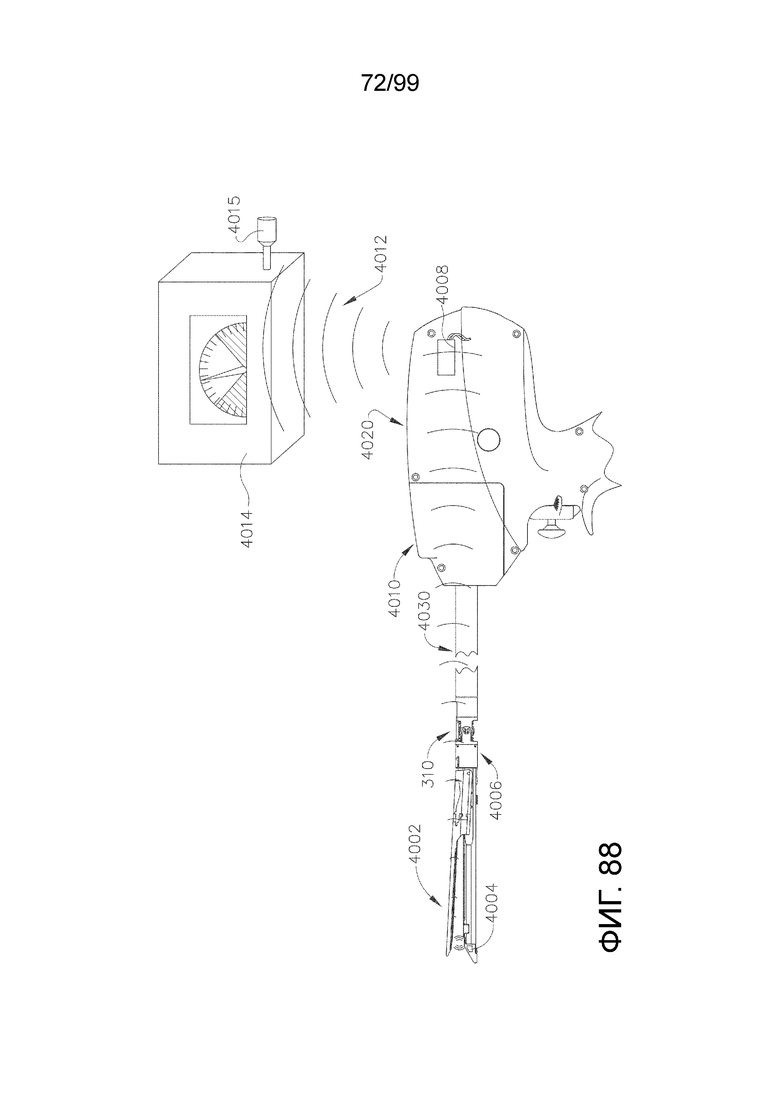
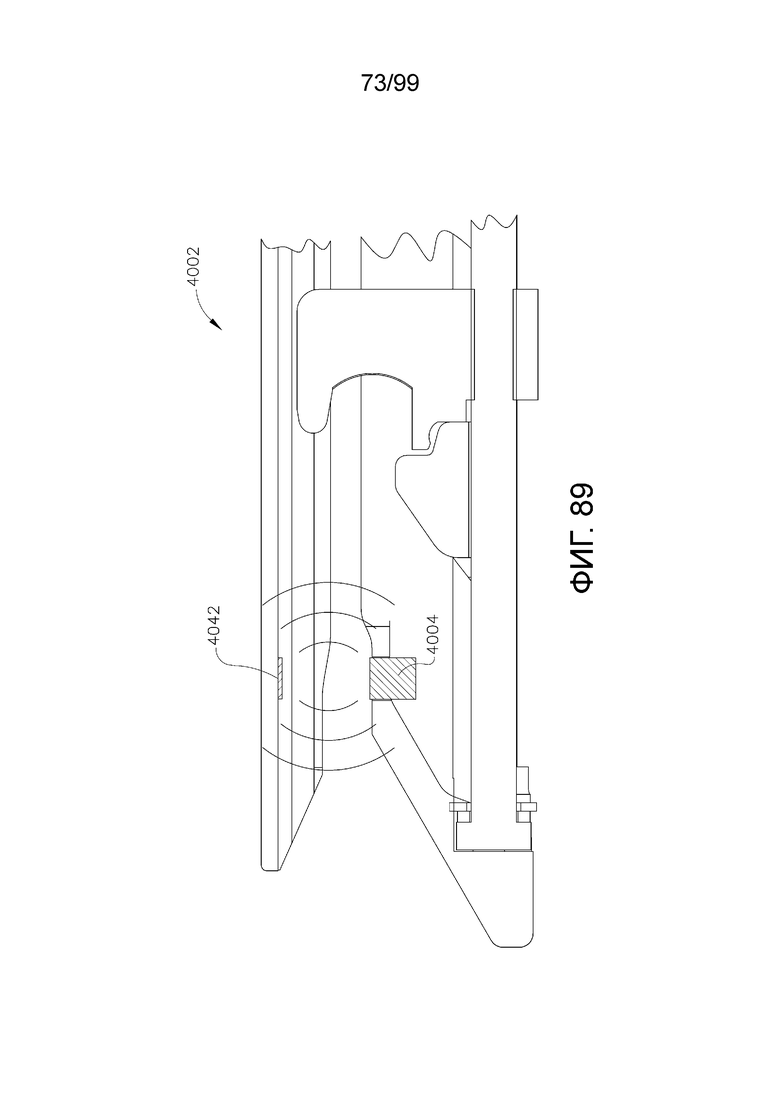
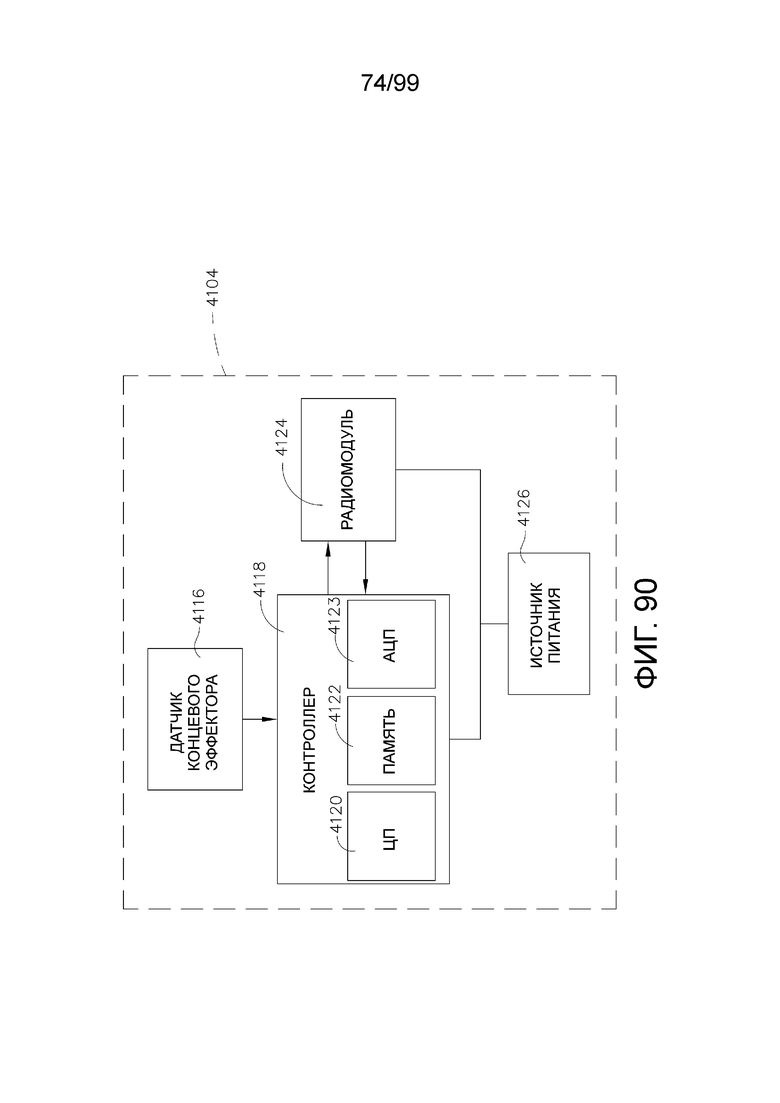
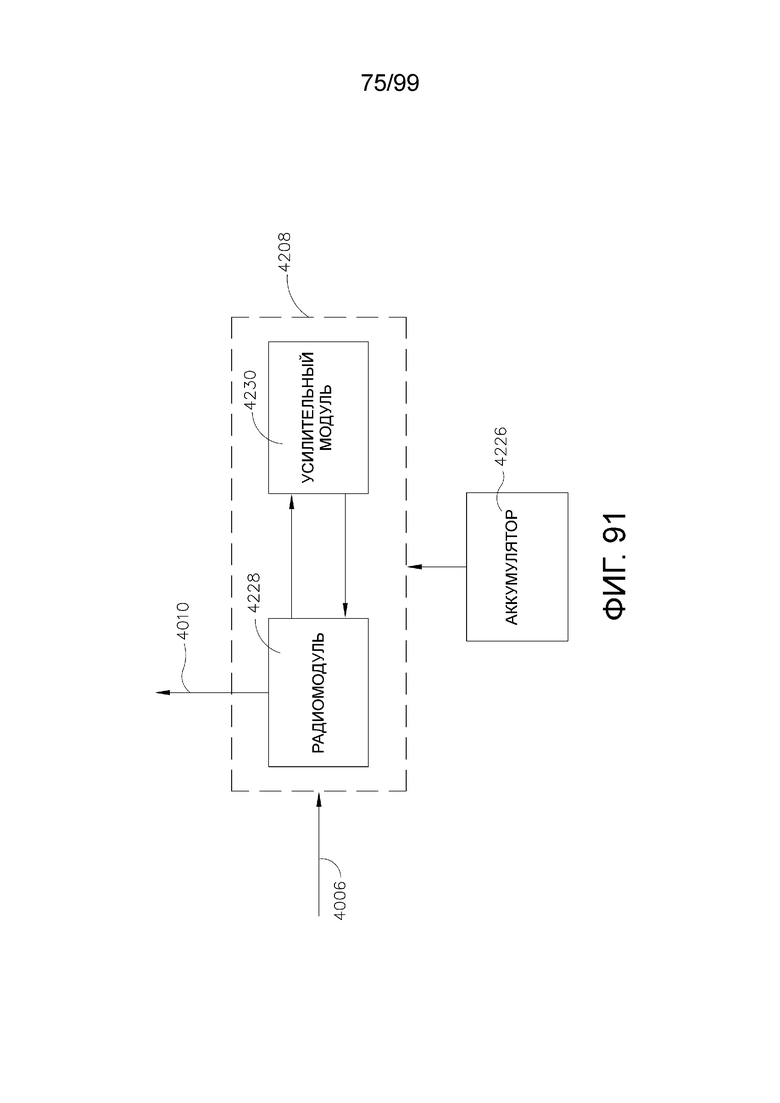
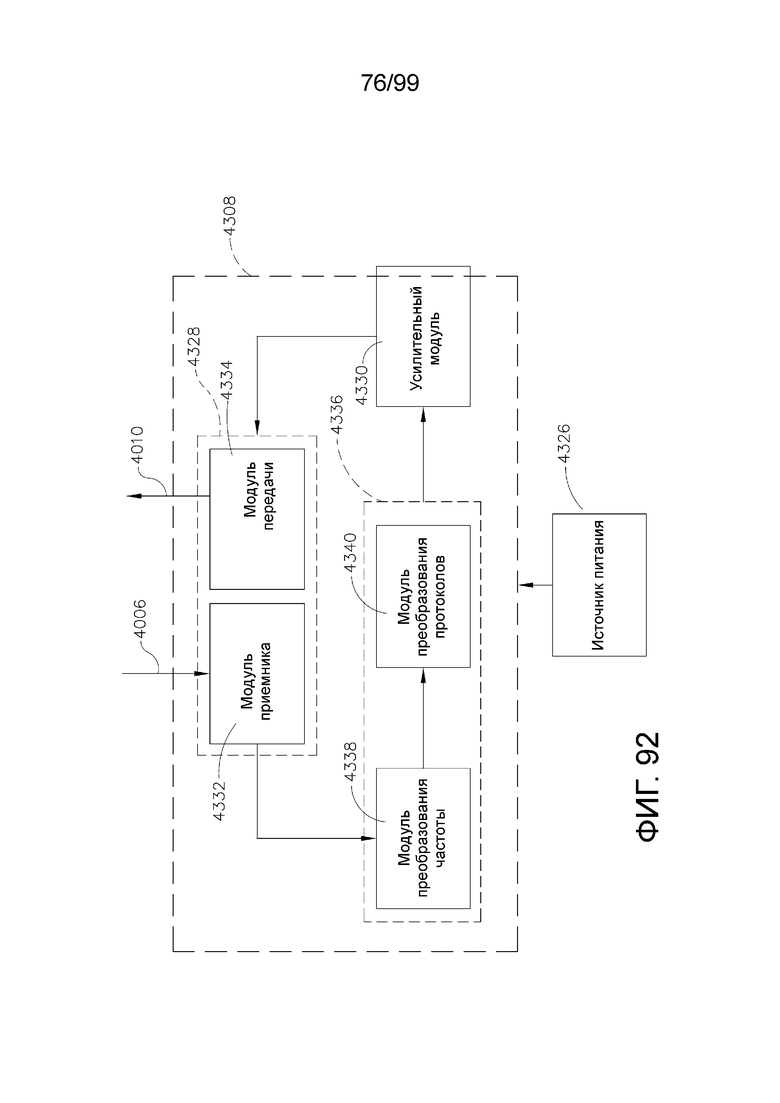
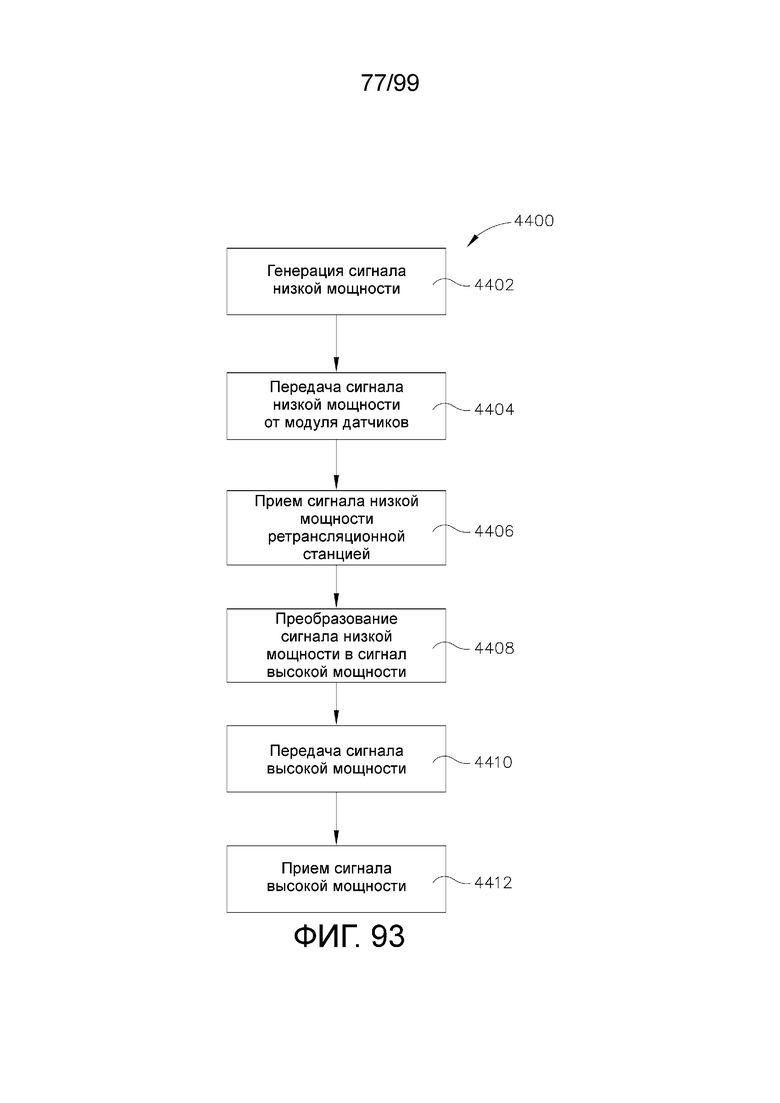
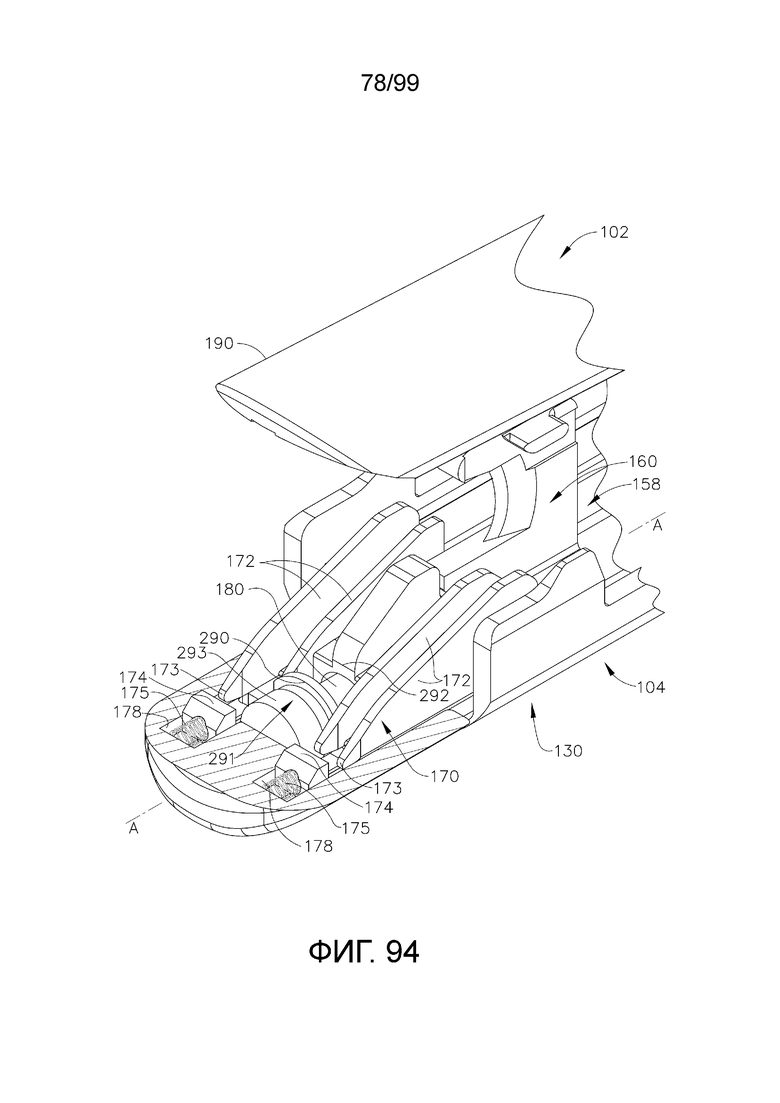
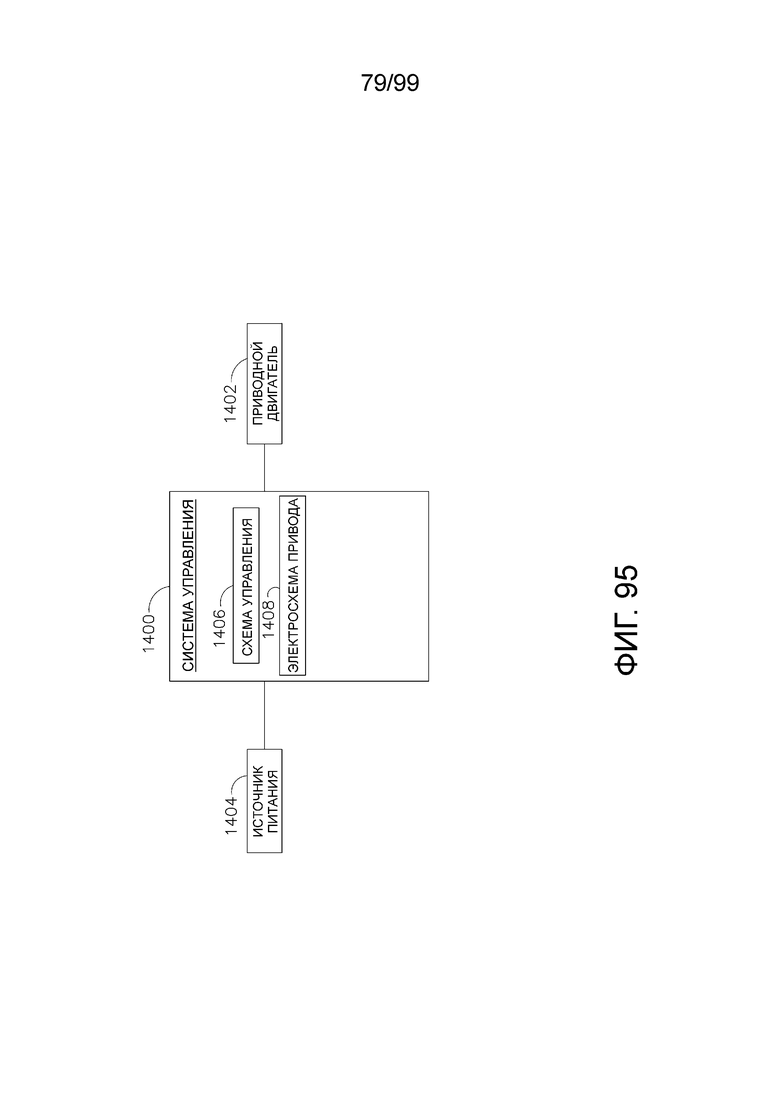
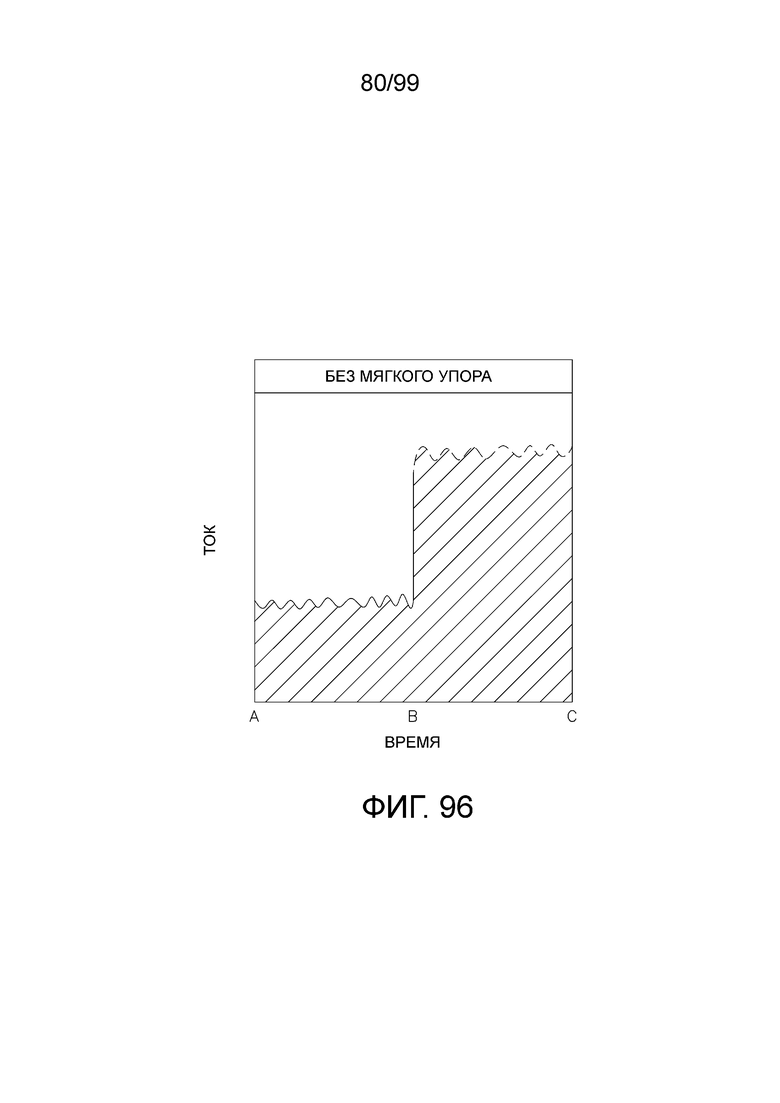
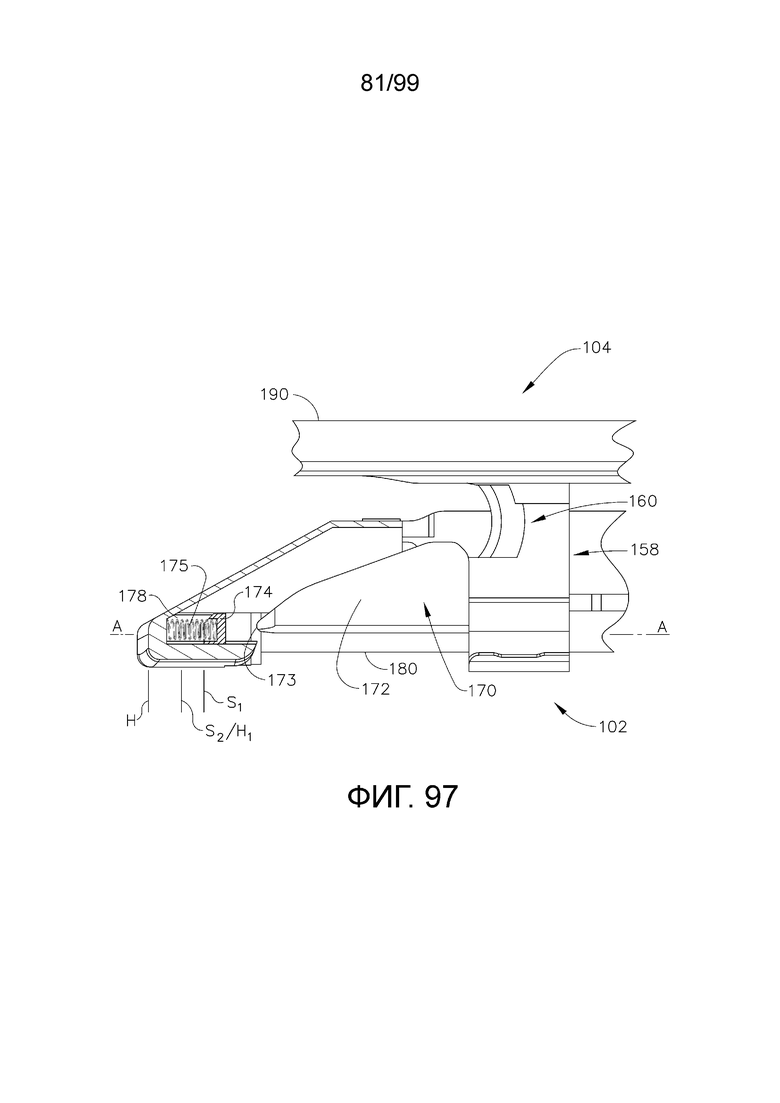
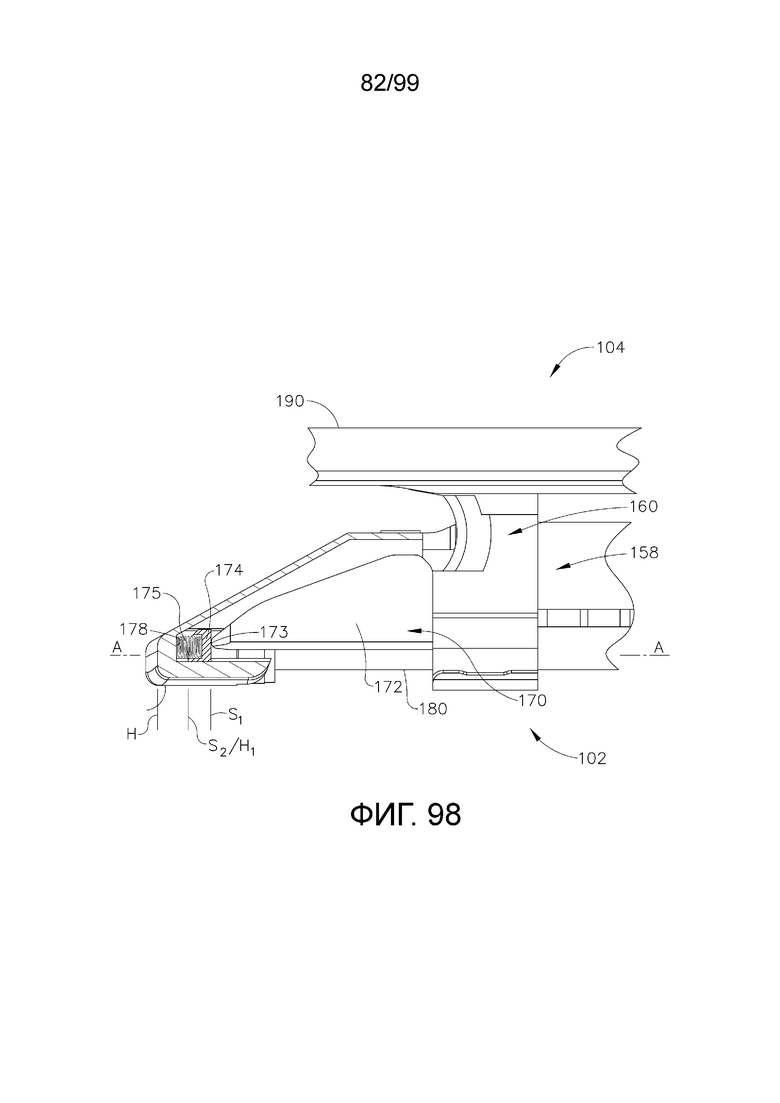
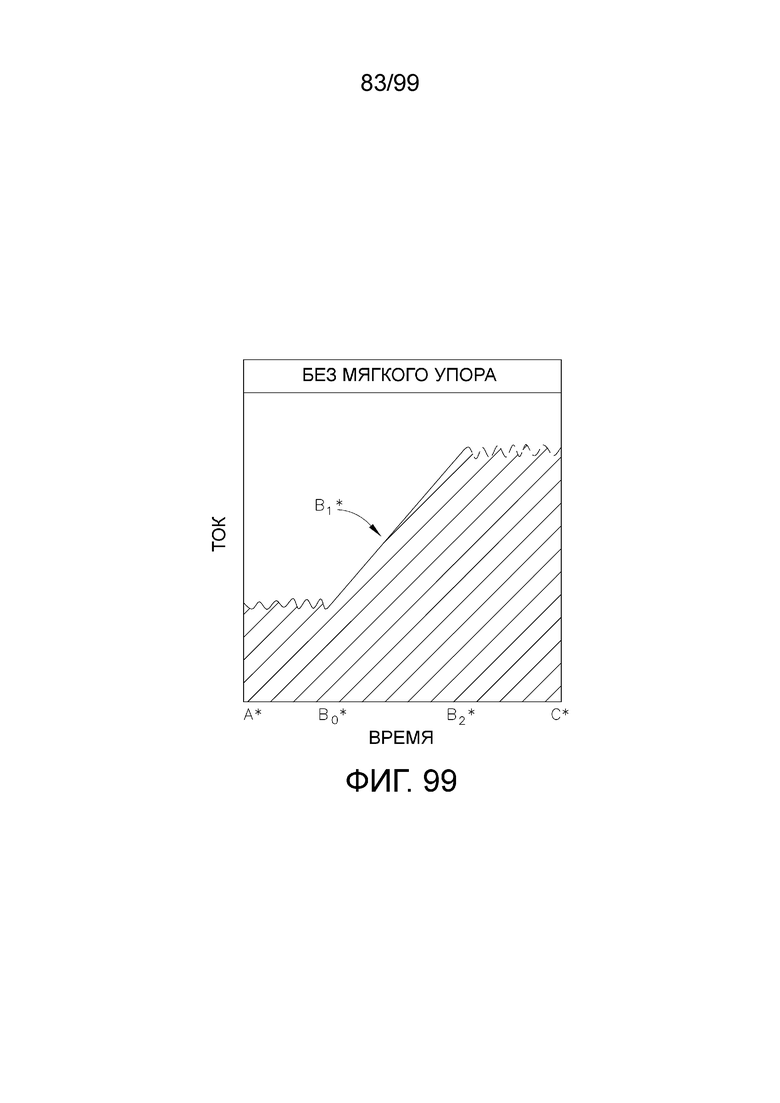
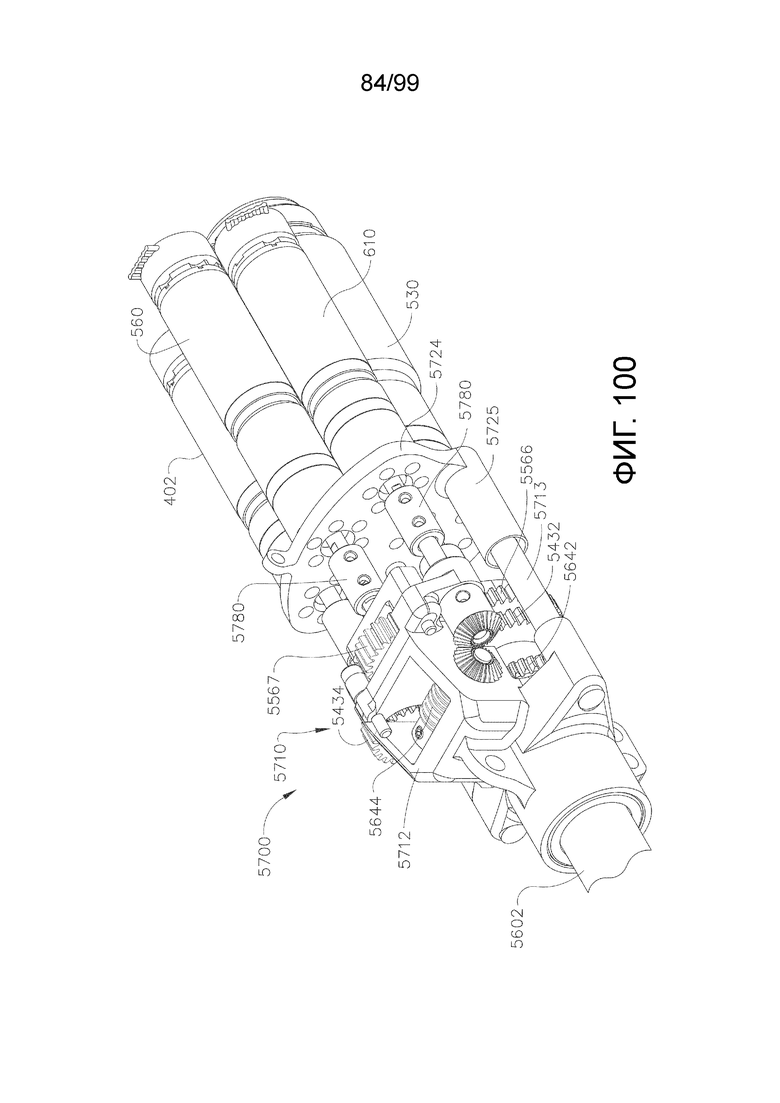
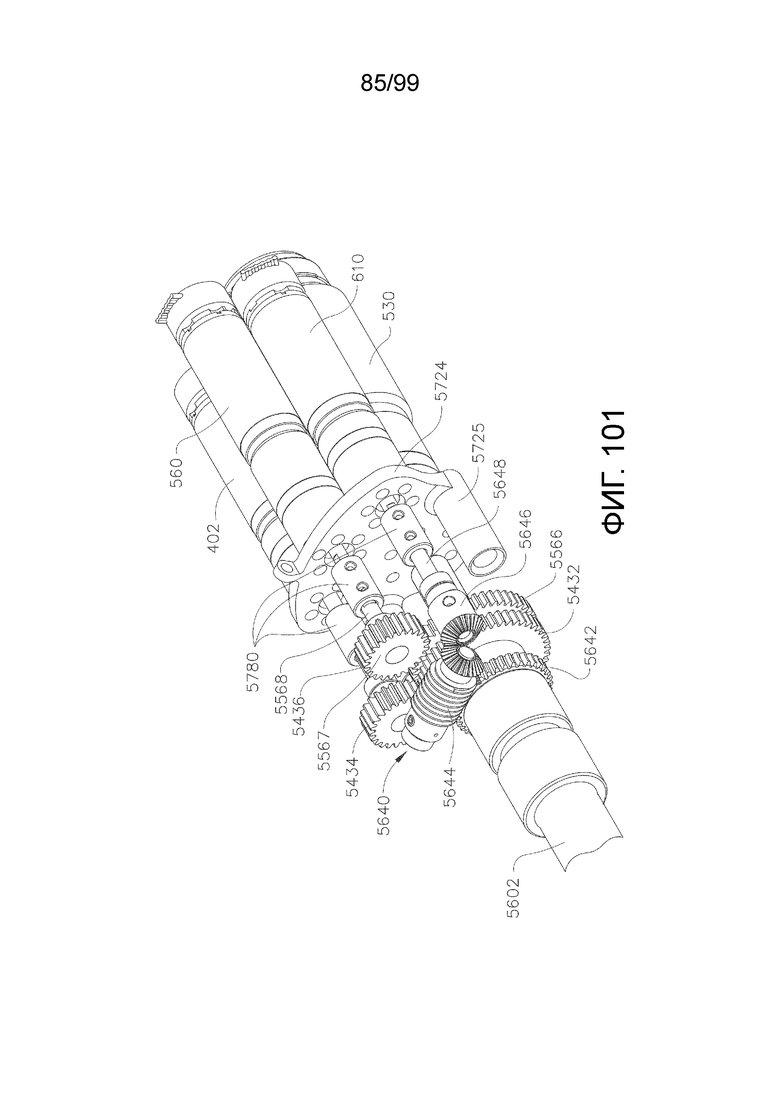
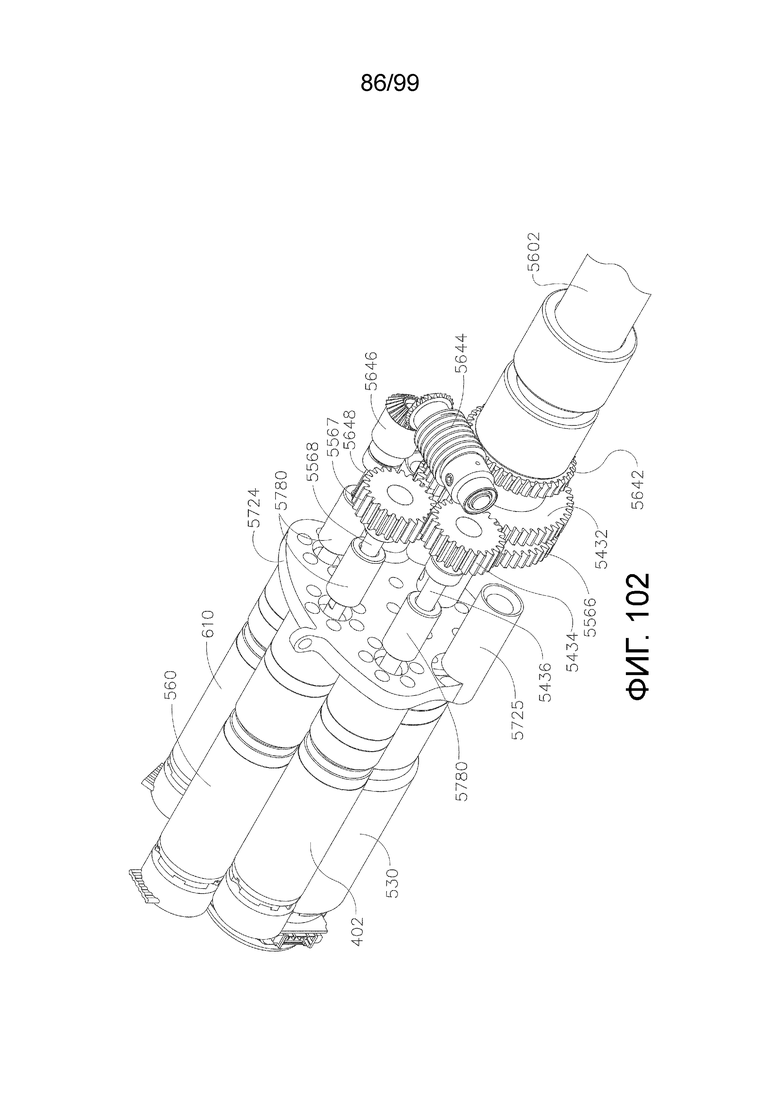
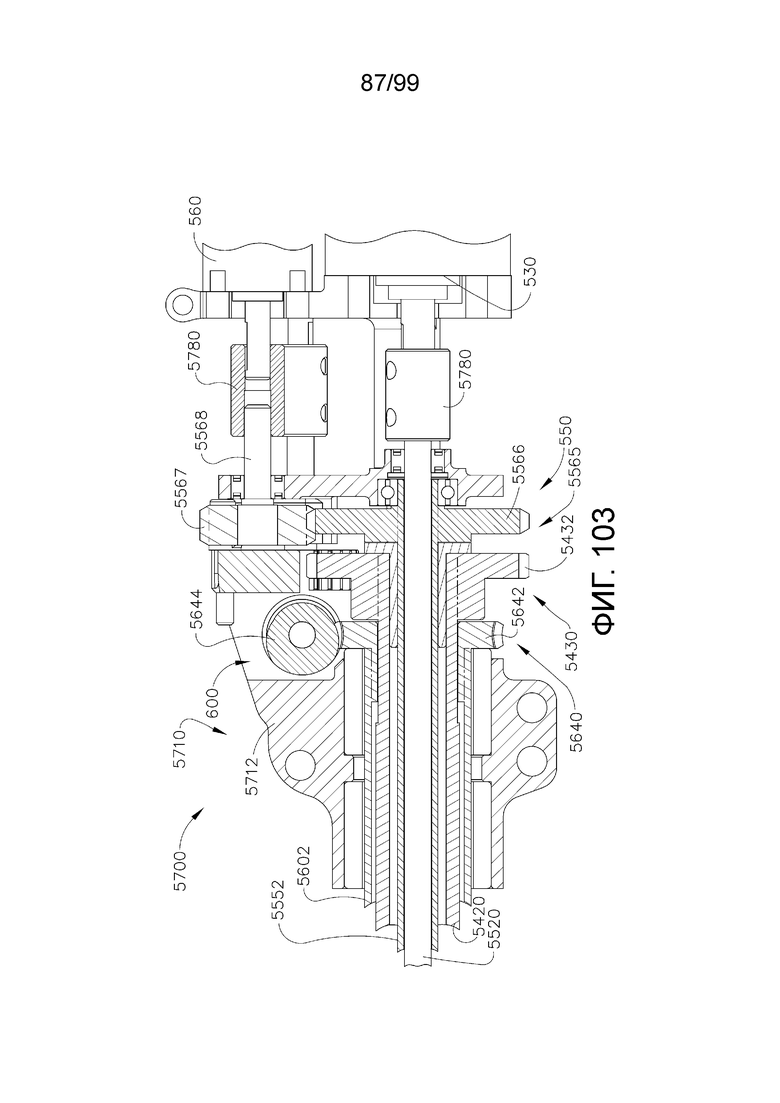
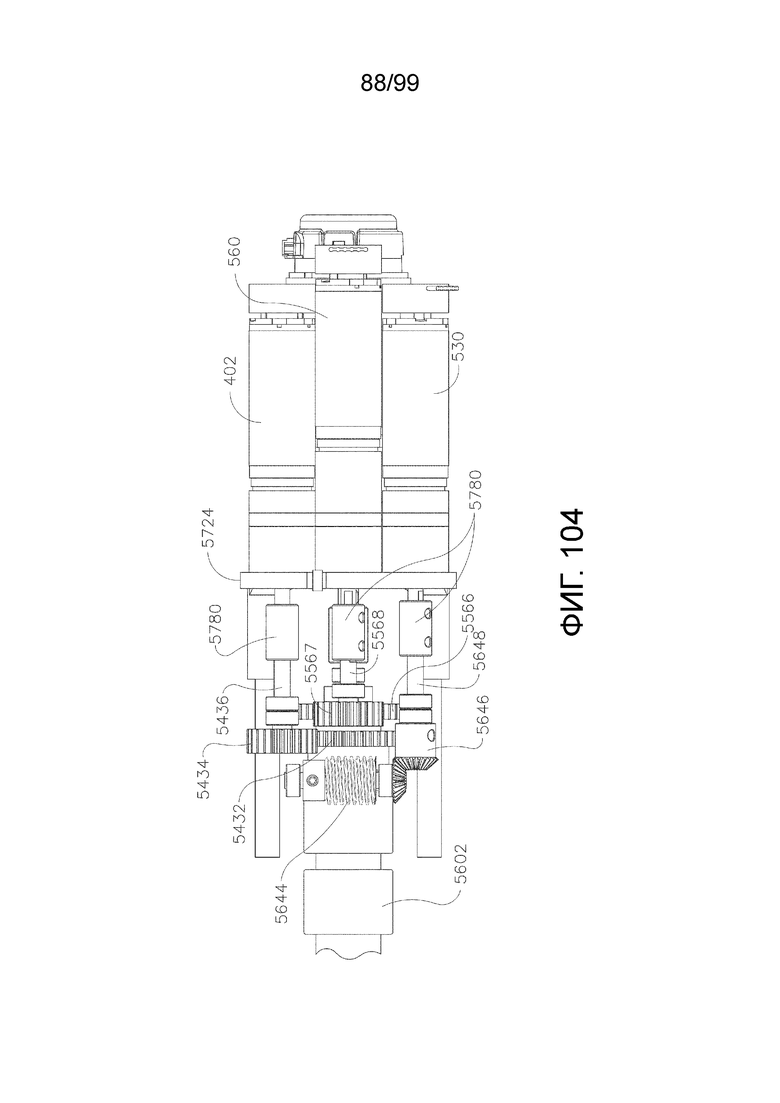
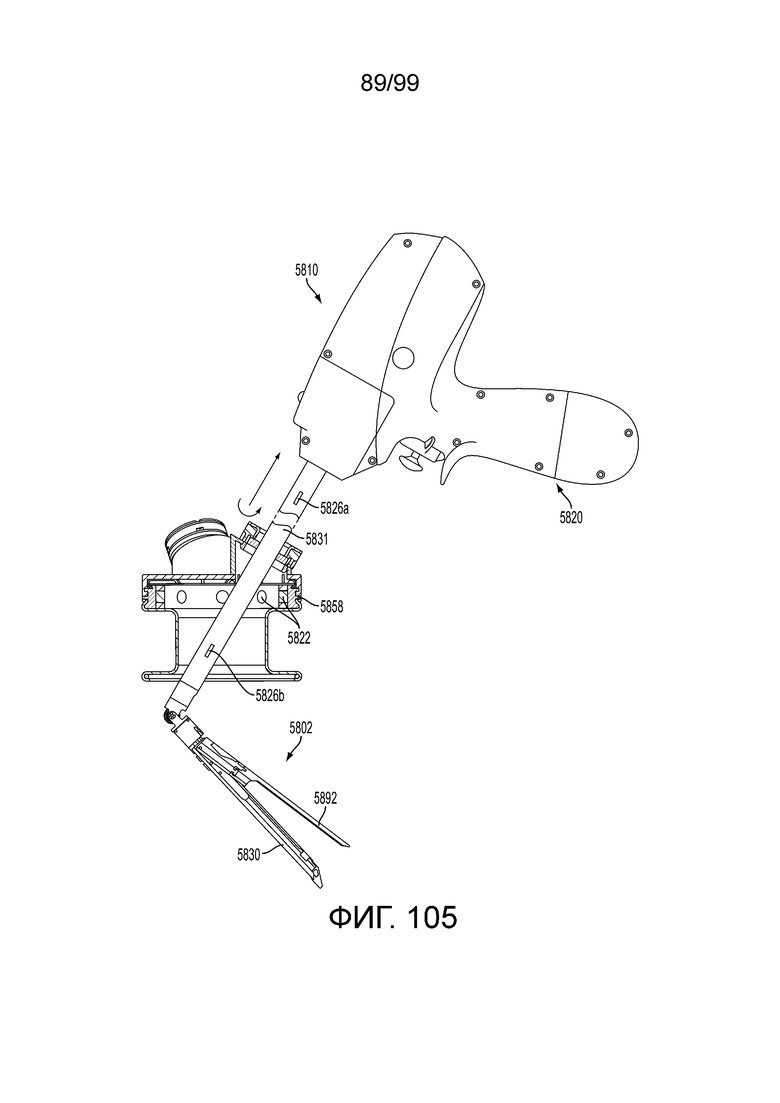
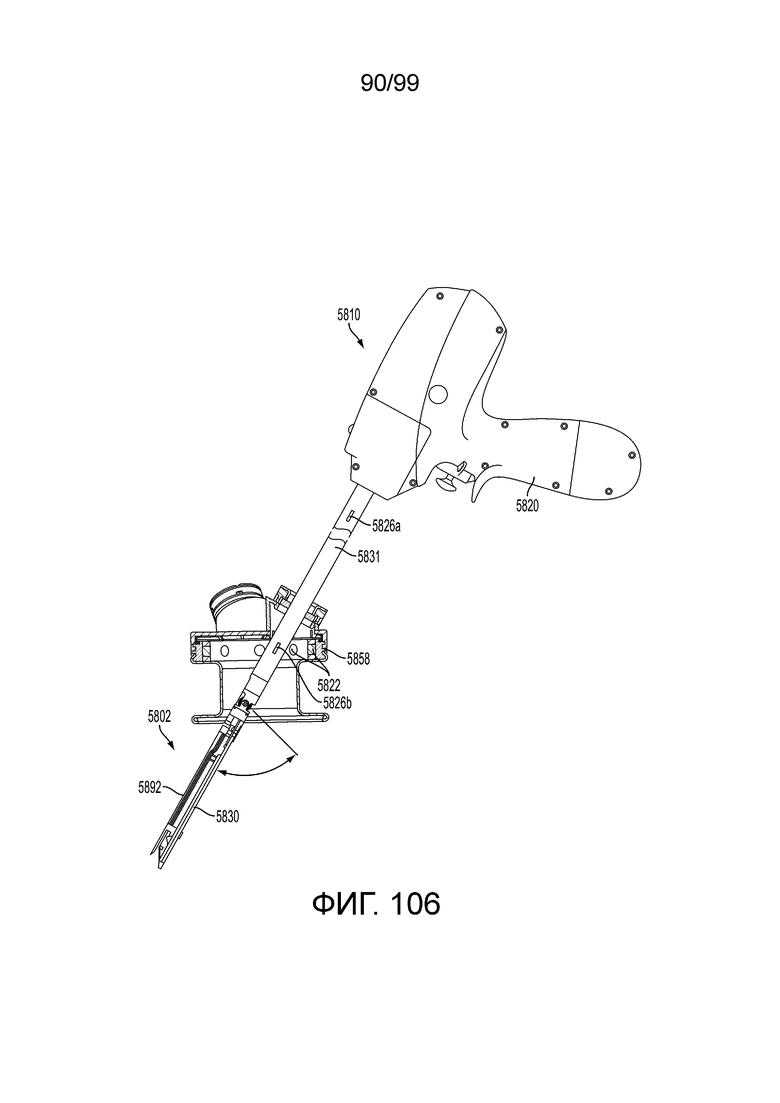
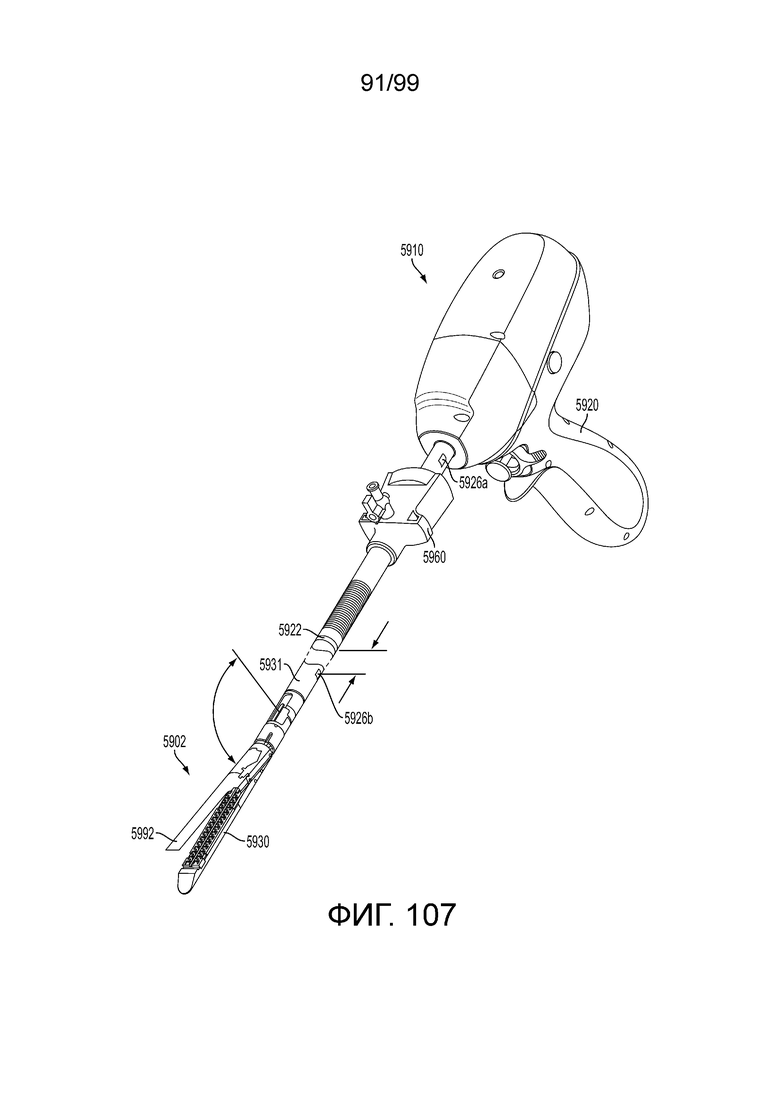
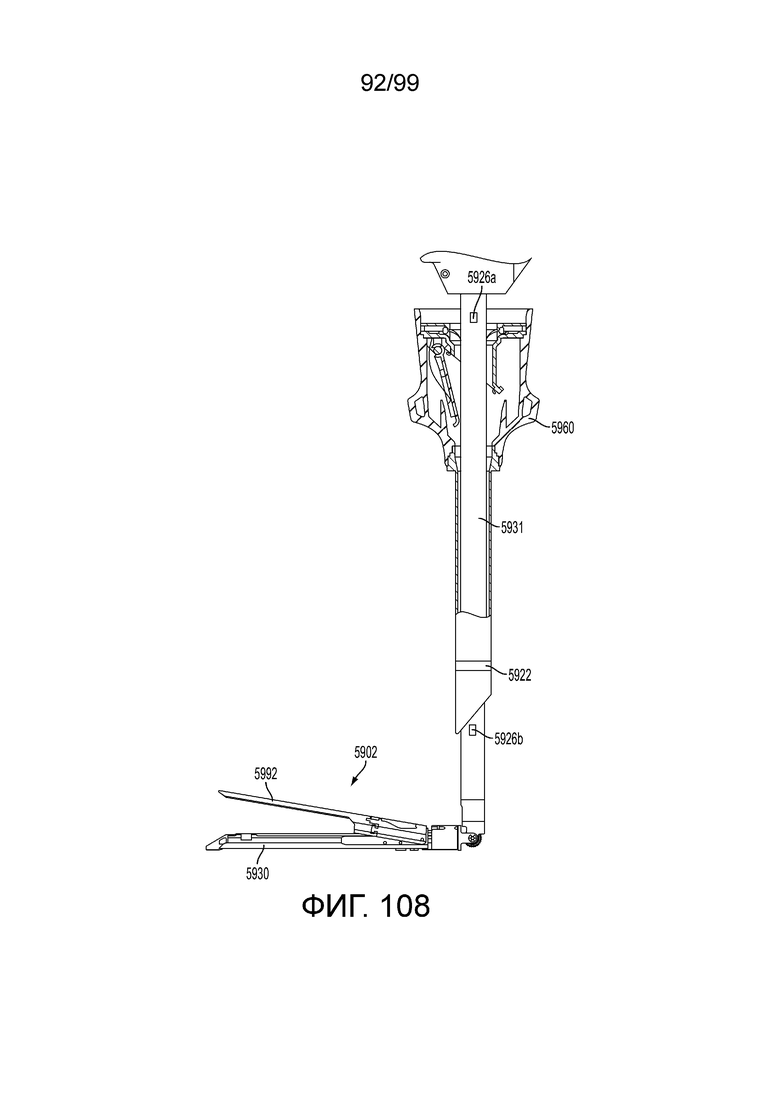
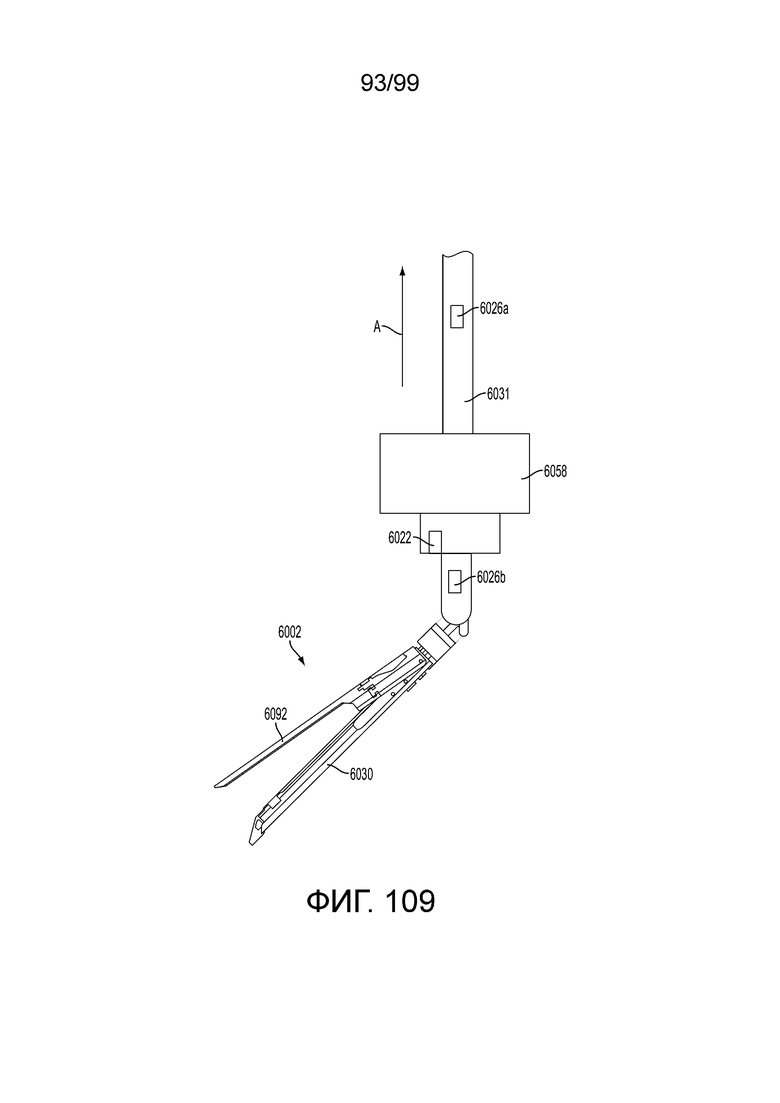
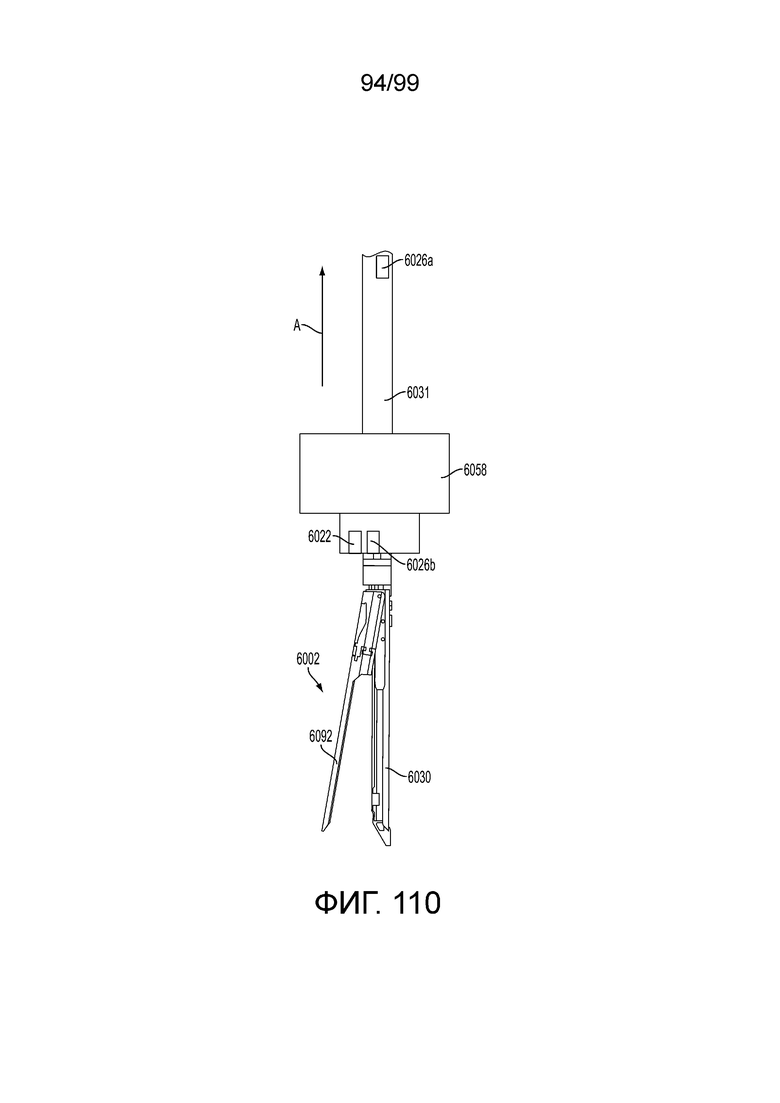
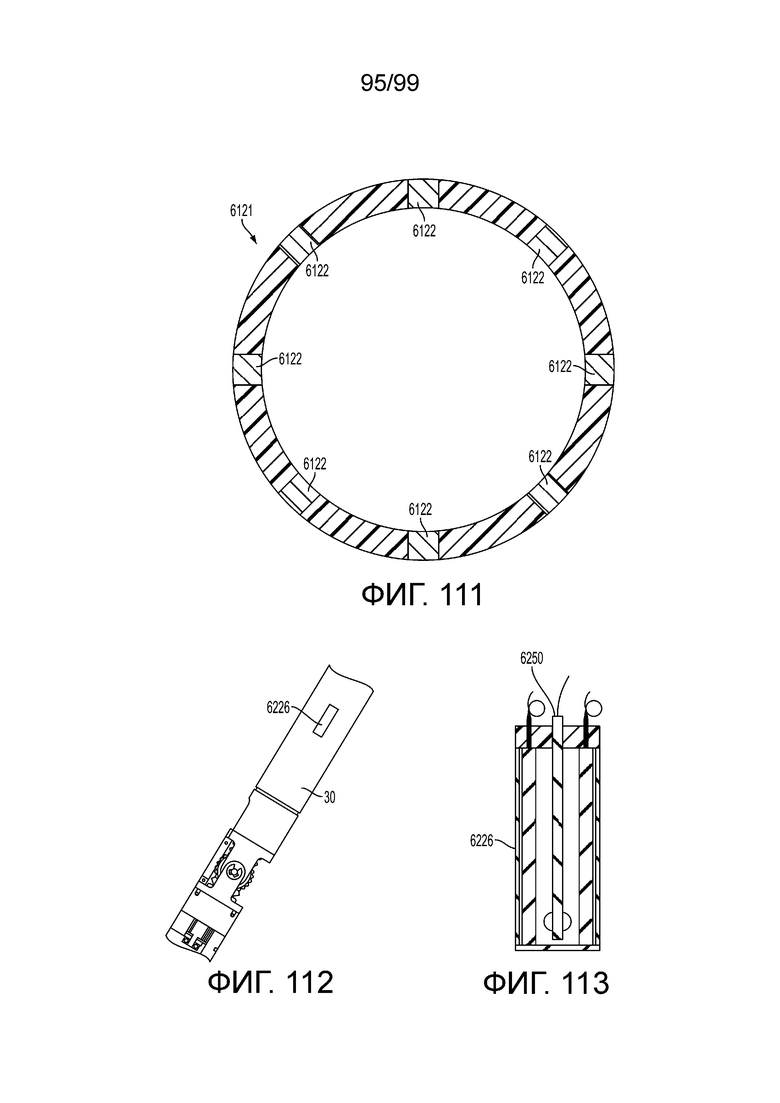
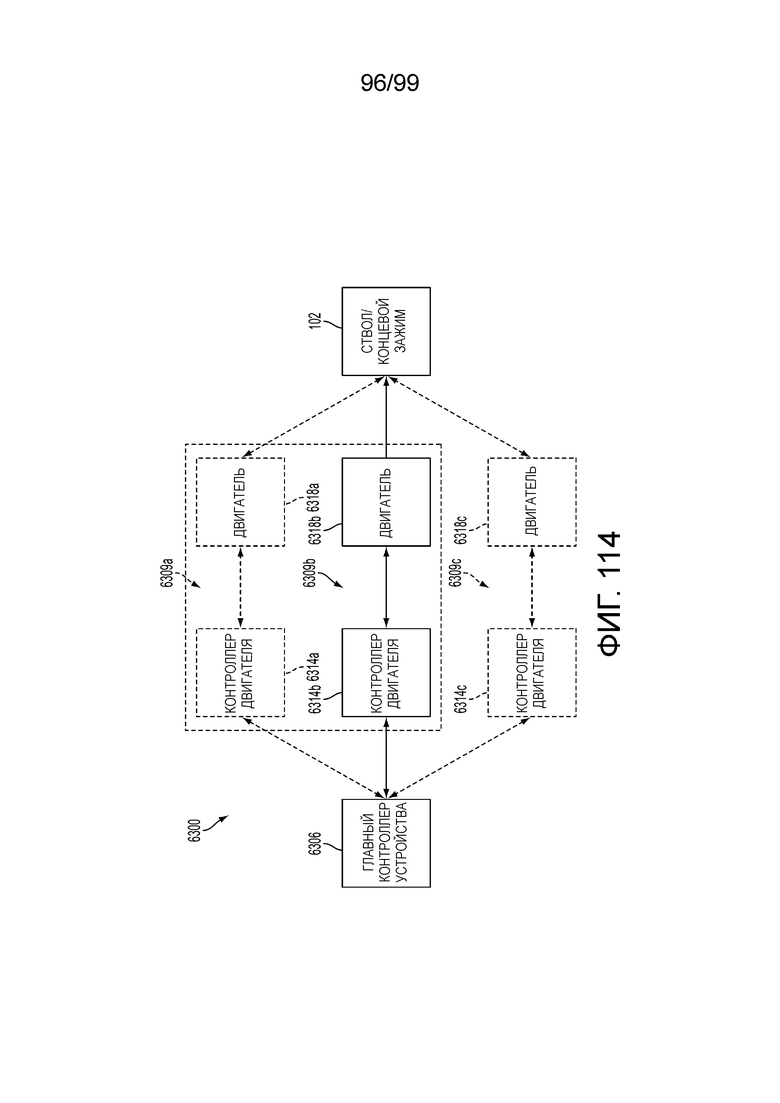
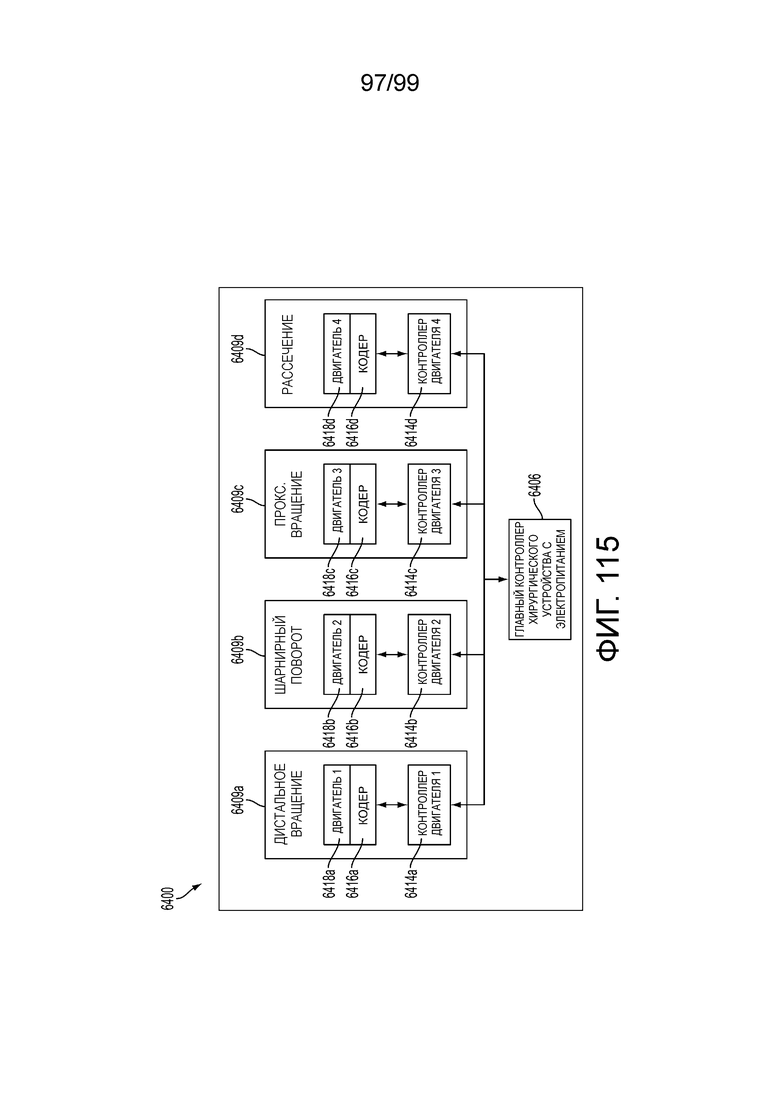
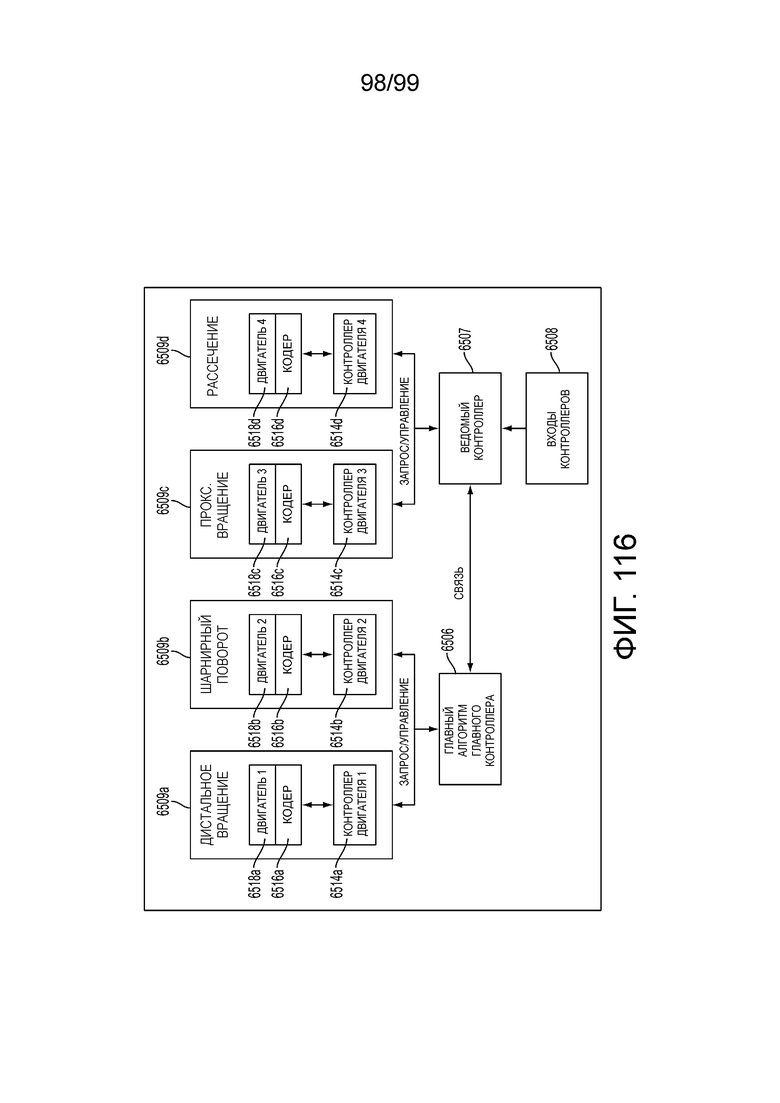
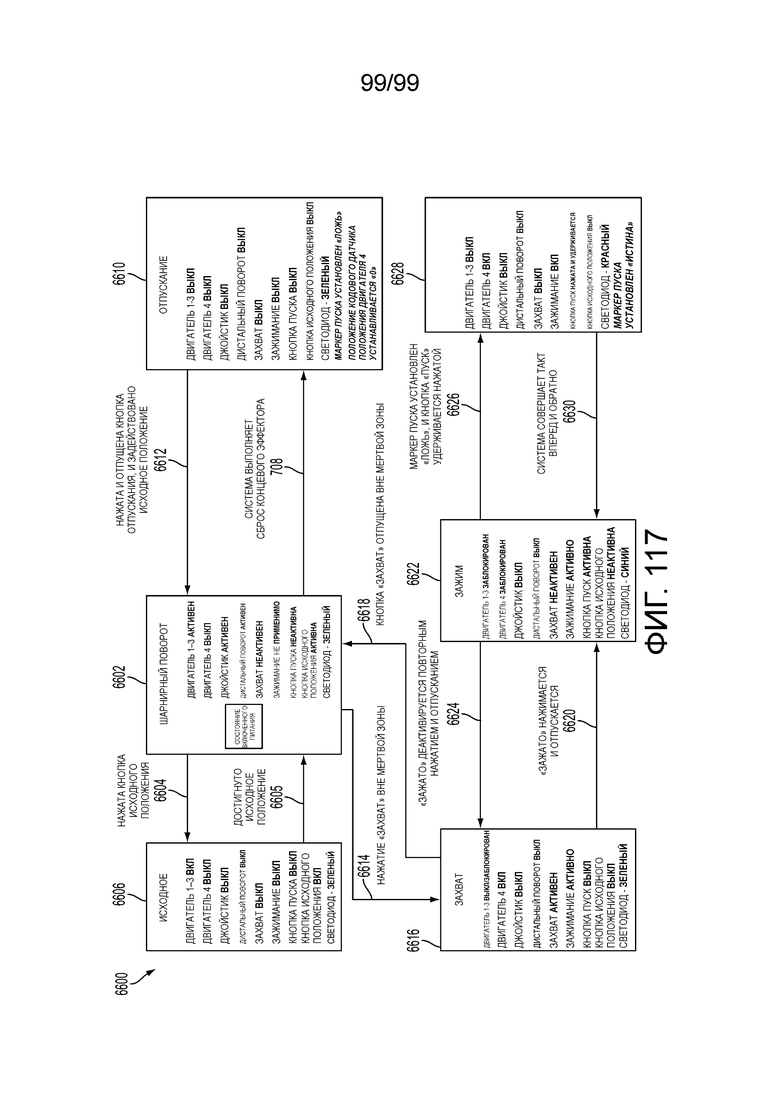
Изобретение относится к медицинской технике и может быть использовано в хирургических инструментах. Модульная система контроля двигателей содержит один или несколько контроллеров двигателей, у каждого из которых есть связанный с ним двигатель. Один или несколько контроллеров двигателей связан с главным контроллером. Главный контроллер выполнен для подачи контрольных сигналов на контроллеры двигателей для управления связанными с ними двигателями. Один или несколько контроллеров двигателей и связанные с ними двигатели могут быть расположены внутри хирургического модуля. Хирургический модуль обеспечивает коммуникационное взаимодействие между главным контроллером и одним или несколькими контроллерами двигателей. 3 н. и 21 з.п. ф-лы, 117 ил.
1. Модульная система управления двигателем, содержащая:
ведущий контроллер;
первый двигатель, выполненный с возможностью управления первым перемещением хирургического инструмента; и
контроллер первого двигателя, функционально связанный с первым двигателем, причем контроллер первого двигателя и ведущий контроллер электрически связаны, причем ведущий контроллер выполнен с возможностью подачи первого управляющего сигнала на контроллер первого двигателя, причем контроллер первого двигателя выполнен с возможностью управления первым двигателем в ответ на первый управляющий сигнал,
причем контроллер первого двигателя содержит замкнутый управляющий процесс, имеющий один или более независимых управляющих процессов для первого двигателя, и причем один или более независимых управляющих процессов содержат управляющий процесс ограничения усилия.
2. Система по п. 1, содержащая:
второй двигатель, выполненный с возможностью управления вторым перемещением хирургического инструмента; и
контроллер второго двигателя, функционально соединенный со вторым двигателем, причем контроллер второго двигателя и ведущий контроллер электрически связаны, причем ведущий контроллер выполнен с возможностью подачи второго управляющего сигнала на контроллер второго двигателя, и при этом контроллер второго двигателя выполнен с возможностью управления вторым двигателем в ответ на второй управляющий сигнал.
3. Система по п. 2, в которой ведущий контроллер выполнен с возможностью исполнения главного управляющего процесса.
4. Система по п. 3, в которой главный управляющий процесс содержит синхронную связь с контроллерами первого и второго двигателей.
5. Система по п. 2, в которой контроллер второго двигателя содержит замкнутый управляющий процесс, имеющий один или более независимых управляющих процессов для второго двигателя.
6. Система по п. 5, в которой один или более независимых управляющих процессов содержат пропорционально-интегрально-дифференциальный управляющий процесс.
7. Система по п. 5, в которой один или более независимых управляющих процессов содержат управляющий процесс обнаружения дефектов.
8. Система по п. 5, в которой один или более независимых управляющих процессов контроллера второго двигателя содержат управляющий процесс ограничения усилия.
9. Система по п. 5, в которой один или более независимых управляющих процессов содержат процесс независимого подтверждения, выполненный с возможностью обеспечения подтверждения первого и второго управляющих сигналов, принятых контроллерами первого и второго двигателей.
10. Система по п. 2, содержащая:
ведомый контроллер, электрически соединенный с ведущим контроллером;
причем ведомый контроллер выполнен с возможностью выработки второго управляющего сигнала для контроллера второго двигателя в ответ на ведущий управляющий сигнал, полученный от ведущего контроллер.
11. Система по п. 10, в которой главный управляющий процесс содержит уравновешивающий нагрузку процесс для избирательного связывания контроллеров первого и второго двигателей с ведущим или ведомым контроллером.
12. Система по п. 10, содержащая:
множество двигателей, выполненных с возможностью управления одной или несколькими операциями хирургического инструмента;
множество контроллеров двигателей, функционально соединенных с множеством двигателей, множество контроллеров двигателей выполнены с возможностью управления множеством двигателей; и
причем множество управляющих сигналов передаются на множество контроллеров двигателей, причем множество контроллеров двигателей выполнены с возможностью управления множеством двигателей в ответ на множество управляющих сигналов.
13. Система по п. 12, в которой
множество двигателей содержит:
дистальный вращающий двигатель;
шарнирный двигатель;
проксимальный вращающий двигатель; и
рассекающий двигатель; и
при этом множество контроллеров двигателей содержит:
контроллер дистального вращающего двигателя;
контроллер шарнирного двигателя;
контроллер проксимального вращающего двигателя; и
контроллер рассекающего двигателя.
14. Хирургический инструмент, содержащий:
рукоятку;
ведущий контроллер;
стержень, проходящий в дистальном направлении из рукоятки;
концевой эффектор, связанный с дистальным концом стержня;
первый двигатель, установленный в рукоятке, причем двигатель выполнен с возможностью управления первым перемещением хирургического инструмента; и
контроллер первого двигателя, электрически связанный с первым двигателем, причем контроллер первого двигателя выполнен с возможностью управления первым двигателем, причем контроллер первого двигателя выполнен с возможностью управления первым двигателем в ответ на первый управляющий сигнал ведущего контроллера,
причем контроллер первого двигателя содержит замкнутый управляющий процесс, имеющий один или более независимых управляющих процессов для первого двигателя, и причем один или более независимых управляющих процессов содержат управляющий процесс ограничения усилия.
15. Инструмент по п. 14, содержащий:
второй двигатель, установленный в корпусе, второй двигатель выполнен с возможностью управления вторым перемещением хирургического инструмента;
контроллер второго двигателя, электрически соединенный со вторым двигателем, контроллер второго двигателя выполнен с возможностью управления вторым двигателем; и
ведомый контроллер, установленный в рукоятке, ведомый контроллер электрически связан с ведущим контроллером, ведомый контроллер выполнен с возможностью подачи второго сигнала на контроллер второго двигателя, причем контроллер второго двигателя выполнен с возможностью управления вторым двигателем в ответ на управляющий сигнал, причем ведомый контроллер выполнен с возможностью выработки второго управляющего сигнала в ответ на ведущий управляющий сигнал, принятый от главного контроллера.
16. Инструмент по п. 15, в котором ведущий контроллер выполнен с возможностью исполнения главного управляющего процесса.
17. Инструмент по п. 16, в котором ведущий управляющий процесс содержит ведущий контроллер, синхронно связывающийся с контроллерами первого и второго двигателей и ведомым контроллером.
18. Инструмент по п. 16, в котором главный управляющий процесс содержит ведущий контроллер, асинхронно связывающийся с контроллерами первого и второго двигателей и ведомым контроллером.
19. Инструмент по п. 15, в котором контроллеры первого и второго двигателей содержат замкнутый управляющий процесс, имеющий один или более независимых управляющих процессов для первого и второго двигателей.
20. Инструмент по п. 14, содержащий:
множество двигателей, выполненных с возможностью управления одной или несколькими операциями хирургического инструмента;
множество контроллеров двигателей, функционально соединенных с множеством двигателей, множество контроллеров двигателей выполнено с возможностью управления множеством двигателей; и
причем множество управляющих сигналов передаются на множество контроллеров двигателей ведущим контроллером, причем множество контроллеров двигателей выполнены с возможностью управления множеством двигателей в ответ на множество управляющих сигналов.
21. Инструмент по п. 19, в котором
множество двигателей содержит:
дистальный вращающий двигатель;
шарнирный двигатель;
проксимальный вращающий двигатель; и
рассекающий двигатель; и
при этом множество контроллеров двигателей содержит:
контроллер дистального вращающего двигателя;
контроллер шарнирного двигателя;
контроллер проксимального вращающего двигателя; и
контроллер рассекающего двигателя.
22. Способ управления хирургическим инструментом, имеющим двигательный привод, причем способ содержит:
выработку ведущим контроллером множества управляющих сигналов;
передачу ведущим контроллером первого подмножества из множества управляющих сигналов на контроллер первого двигателя;
управление первым двигателем посредством контроллера первого двигателя, причем первый двигатель управляет первой функцией хирургического инструмента, имеющего двигательный привод, и при этом первый двигатель управляется в ответ на первое подмножество из множества управляющих сигналов,
причем первым двигателем управляют контроллером первого двигателя согласно замкнутому управляющему процессу, имеющему один или более независимых управляющих процессов для первого двигателя, и причем один или более независимых управляющих процессов содержат управляющий процесс ограничения усилия.
23. Способ по п. 22, содержащий:
передачу ведущим контроллером второго подмножества из множества управляющих сигналов на контроллер второго двигателя;
управление вторым двигателем посредством контроллера второго двигателя, причем второй двигатель управляет второй функцией хирургического инструмента, имеющего двигательный привод, и причем второй двигатель управляется в ответ на второе подмножество из множества управляющих сигналов;
при этом первое и второе подмножества из множества управляющих сигналов передаются синхронно.
24. Способ по п. 22, содержащий:
передачу ведущим контроллером второго подмножества одного или более управляющих сигналов на ведомый контроллер;
выработку ведомым контроллером одного или более дополнительных управляющих сигналов;
передачу ведомым контроллером одного или более дополнительных управляющих сигналов на контроллер второго двигателя;
управление вторым двигателем посредством контроллера второго двигателя, причем второй двигатель управляет второй функцией хирургического инструмента, имеющего двигательный привод, причем второй двигатель управляется в ответ на подмножество одного или более дополнительных управляющих сигналов.
| US 5282381 A, 08.02.1994 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6911916 B1, 28.06.2005 | |||
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |

