ПИК предназначен для сбора, обработки и хранения геофизических данных, измеренных (с помощью того же ПИК), преобразованных в требуемый формат и скомпонованных в массивы для дальнейшего использования, в частности для обработки данных электромагнитных зондирований при геолого-разведывательных работах. ПИК используют как для наземных, так и для морских измерительных установок, в частности, для проведения геофизических исследований дифференциально-нормированным методом электроразведки (ДНМЭ), а также методом электроразведки для изучения геоэлектрических и поляризационных свойств земной коры. ПИК предназначен для обработки сухопутных и морских данных в автоматическом режиме.
Известно изобретение «Устройство для сбора, обработки и пакетной передачи результатов измерения параметров физической среды», патент RU №2080653, опубл. 27.05.1997, МПК G06F 17/40, содержащее управляющий вычислительный комплекс с адресно-информационной и командной магистралью и измерительные датчики. Устройство позволяет при эксплуатации в необслуживаемом режиме в качестве одного из периферийных устройств сети связи обеспечить пакетную передачу достоверной, мало избыточной и сгруппированной по определенным признакам информации о параметрах исследуемой физической среды. Однако не обеспечивает обработку сухопутных и морских данных измерительных устройств в автоматическом режиме, не решена задача привязки системы наблюдений путем вычисления координат каждого элемента этой системы, не достигается требуемая степень помехозащищенности для заданного временного диапазона.
Наиболее близким к заявленному устройству является изобретение «Геофизическая система сбора и обработки информации», патент RU №2091820, опубл. 27.09.1997, МПК G01V 3/08, G01V 1/22, содержащая программу сбора данных, блок обработки и хранения данных, и блок обработки данных совмещен с блоком управления. Система обеспечивает сбор и обработку геофизической информации, в частности измеренных, зарегистрированных и обработанных электрических и магнитных составляющих электромагнитного поля, при изучении геодинамических процессов, протекающих в земной коре, методами электроразведки. Однако система некомпактна, т.к. включает промежуточные пункты обработки данных и систему передачи данных в единый пункт. Это уменьшает количество одновременно обработанных станцией сигналов, а также не обеспечивает универсальности обработки данных в полном объеме независимо от вида измерительных установок.
В настоящее время при сборе, хранении и обработке данных электромагнитных зондирований требуется вести обработку полевого материала в автоматическом режиме, а также обеспечить хранение новой информации в заданных форматах для дальнейшего удобного их использования и проверки промежуточных результатов. Кроме того, система должна обеспечивать координацию взаимодействий создаваемых массивов информации, которые передаются, хранятся и в дальнейшем обрабатываются в сопоставимых файловых форматах. Для этого требуются массивы первичных и вторичных данных, в частности текущих массивов измеренных данных, представлять в формате реляционных файлов или в формате внутренних бинарных файлов. Так, ссылки на бинарные файлы требуется разместить в формате реляционных файлов, для обеспечения сбора и хранения всей первичной полевой информации.
Существенно увеличились объемы массивов исходных данных, так, количество записанных за полевой сезон точек стало исчисляться тысячами, что усложняет их сбор и дальнейшую передачу и обработку на промежуточных этапах.
Также требуется производить первичный анализ и редактирование первичного полевого материала (массивов сигналов) с целью удаления тех собранных результатов измерения при зондировании, где имеется заведомо высокий уровень шума.
Для более достоверного сбора, хранения и обработки гидрографических данных и данных топографической съемки требуется осуществлять в пространстве привязку системы наблюдений путем вычисления координат каждого элемента этой системы (ПИК), и эти координаты требуется сохранять в таблицах в реляционной базе данных (БД), содержащих данные, связанные с электромагнитным зондированием, причем данные впоследствии следует передавать в виде пакетов данных, каждый из которых составляет информационную единицу.
Кроме того, в комплексе (ПИК) требуется удалять тренд на каждой временной задержке (при осуществлении измерений), возникающий под действием теллурических токов, дрейфа нуля усилителей, изменения собственных потенциалов электродов, и использовать итерационный подход с целью минимизации влияния выбросов и сбоев, что можно обеспечить, например, посредством применения высокочастотной фильтрации сигналов при передаче пакетов данных.
Таким образом, следует решить задачу удаления промышленных периодических помех, которые подавляются с помощью применения дифференцирующего фильтра, а также задачу стабильности измерений, что обеспечивается при применении последовательности сбора и обработки массивов информации с использованием методов робастной статистики.
За счет этого в комплексе ПИК достигается высокая степень помехозащищенности, что подтверждается стабильностью результатов и воспроизводимостью контрольных наблюдений с точностью менее 1% для заданного временного диапазона.
Таким образом, предложенное техническое решение программно-измерительного комплекса (ПИК) обеспечивает достижение следующего технического результата:
- увеличение объемов массивов измеренных данных для каждого временного цикла измерений, представленного в операционных единицах, или первичных данных, как они указываются в отчетах АЦП, для пакетной передачи данных в требуемом формате, пригодном для последующих операций преобразования;
- увеличение количества одновременно обрабатываемых массивов данных (быстродействие комплекса);
- обеспечение универсальности ПИК для разных схем геофизических зондирований, т.е. для разных дипольных установок геофизической измерительной системы (ДУ ГИС), в частности:
- для наземных дипольных установок типа линия - линия (две приемные линии);
- для наземных дипольных установок типа петля - линия (приемная линия - генераторная петля);
- для морских дипольных установок с несколькими приемными линиями;
- а также, без существенных изменений в ПИК возможно обрабатывать данные петля - петля (приемная петля - генераторная петля).
Заявленный технический результат обеспечен тем, что программно-измерительный комплекс (ПИК) содержит геофизическую измерительную систему (ГИС) (1), связанную с блоками обработки данных (2), (3), один из которых совмещен с модулем хранения измеренных данных (4), а второй - с блоком управления (БУ), являющимся по существу блоком обработки исходных данных (5), и снабженных программным обеспечением. ПИК отличается тем, что:
- к ГИС подключают измерительные установки (ИУ) (6),
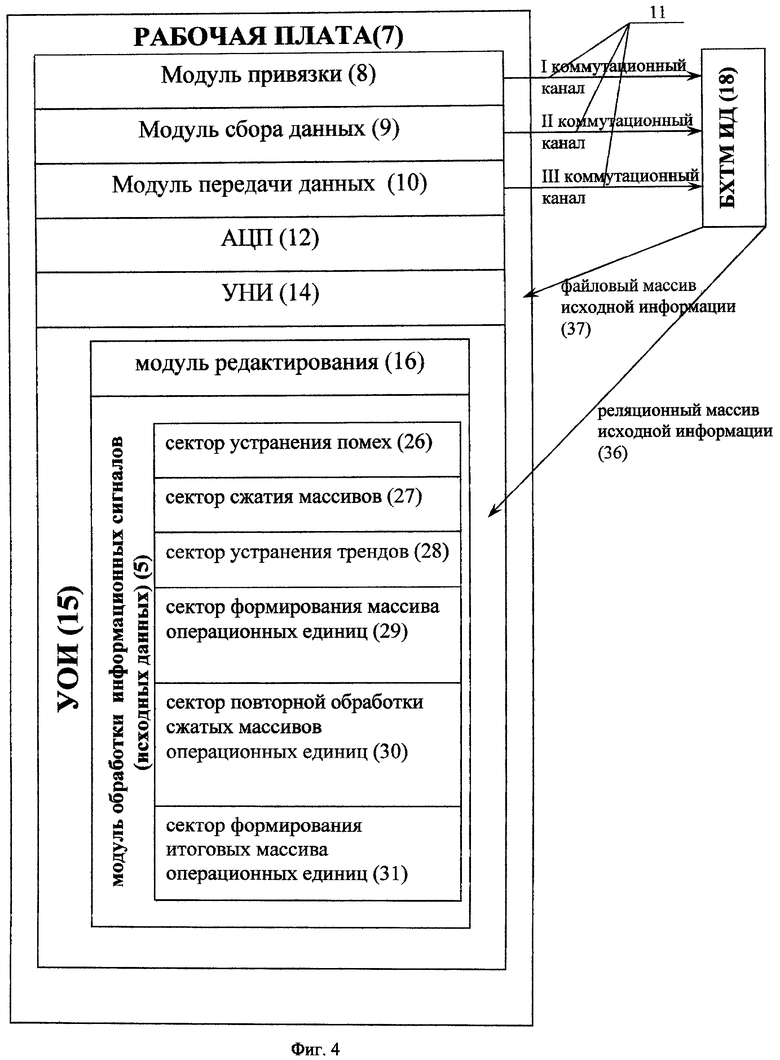
- ГИС размещена на рабочей плате (7) и включает:
- модуль привязки (8) измерительной установки к местности и получения дополнительной информации,
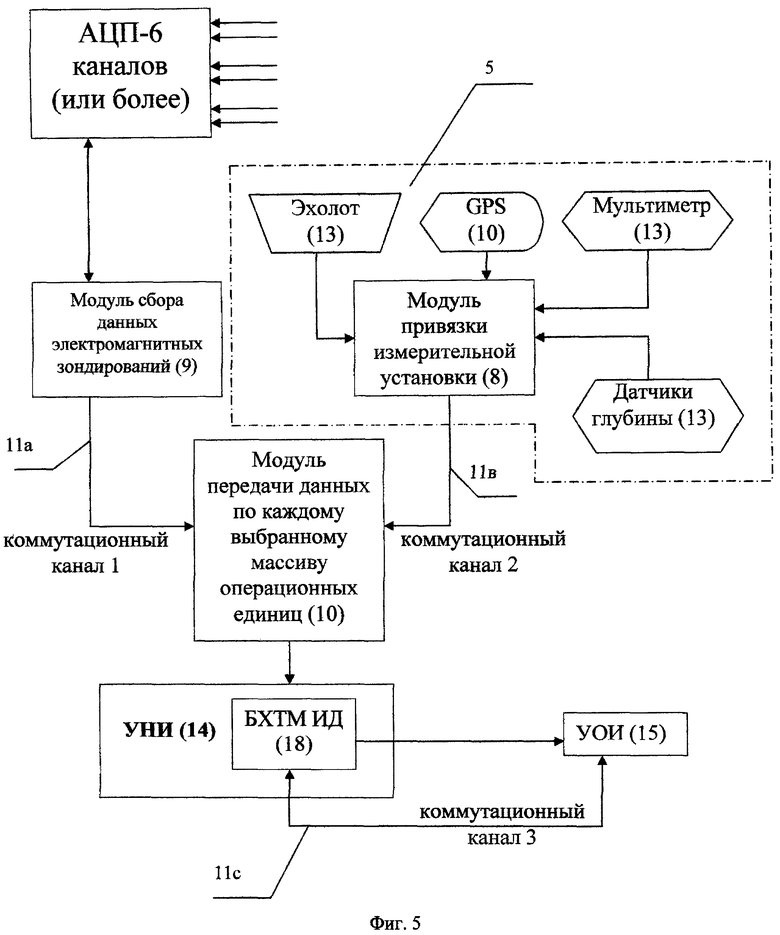
- модуль сбора данных (9) электромагнитных зондирований,
- модуль передачи данных (10) по каждому выбранному массиву первичных данных в блок хранения текущего массива измеренных данных (БХТМ ИД), при этом массив первичных данных передается несколькими сессиями, в которых операционная единица - это тот пакет данных (например, сжатых), который передается за одну сессию по одному из коммуникационных каналов (11).
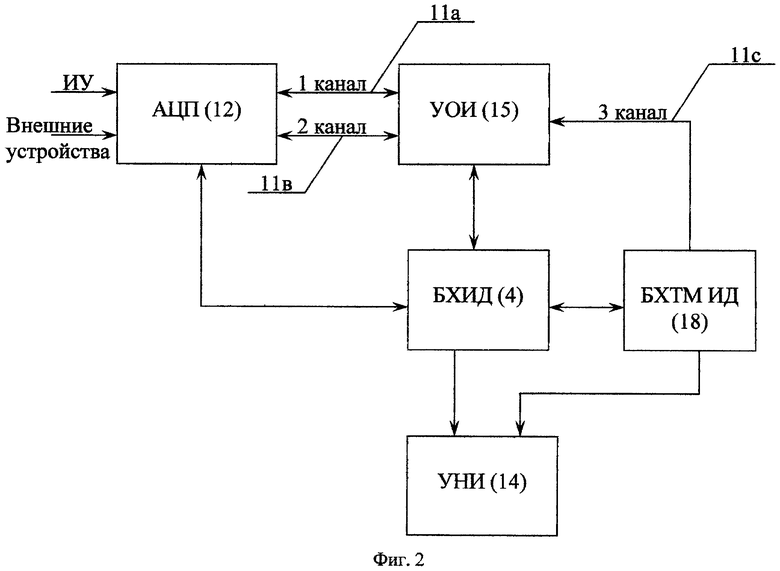
Кроме того, блок ГИС (1) снабжен по крайней мере тремя коммутационными каналами:
коммутационным каналом 1 информационных сигналов (11а), соединяющим АЦП с устройством накопления информации (УНИ) и обеспечивающим передачу массивов первичных данных (пакетированных операционных единиц) во внутреннем бинарном формате, разработанном для хранения исходных данных электромагнитных зондирований,
- коммутационным каналом 2 информационных сигналов (11в), соединяющим АЦП и УНИ и обеспечивающим передачу собранной дополнительной информации с внешних измерительных устройств (ИУ) (GPS, мультиметр, эхолот, датчики глубины и др.)
- и коммутационным каналом 3 обработанных УОИ информационных сигналов (11с),
и блок ГИС (1) также включает
- АЦП (12) типа дельта - сигма АЦП с большим динамическим диапазоном, для записи данных электромагнитных зондирований, и внешние устройства (13) (GPS, мультиметр, эхолот, датчики глубины и др.), обеспечивающие дополнительной информацией об измерительной системе, совместно представляющие собой блок управления (5), снабженный специальным ПО,
- устройство накопления информации (УНИ) (14)
- и устройство обработки информации (УОИ) (15), включающее:
- модуль редактирования (16), снабженный специальным программным обеспечением (ПО)
- и модуль обработки информационных сигналов (3) (модуль обработки данных).
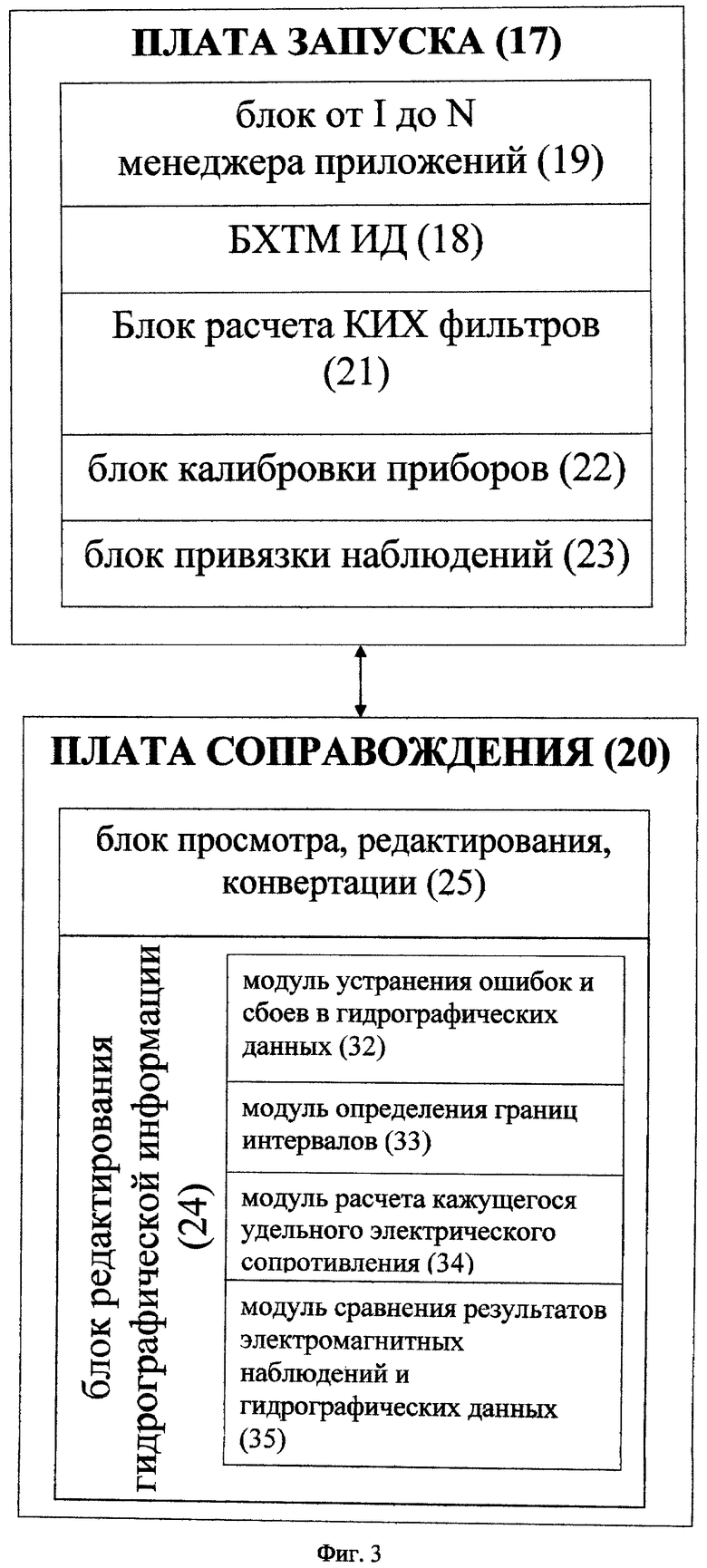
ПИК дополнительно содержит плату запуска (17), посредством которой работа блока запуска (19) синхронизирована с работой блока хранения текущего массива измерительных данных (БХТМ ИД) (18), и плату сопровождения (20), которая обеспечивает посредством модуля привязки (8) блока ГИС (1) привязку ИУ (6), в частности дипольной установки (ДУ), к картам и редактирование массива операционных единиц в формате бинарных файлов в УНИ (14), при этом обеспечивая стабильность получения результатов путем применения методов робастной статистики, при этом плата запуска (17) включает в себя - и включающий их в работу в заданной последовательности
- блок хранения текущего массива измерительных данных (БХТМ ИД) (18), состоящего из модулей исходных данных двух видов - файловые и реляционные, содержащих элементы памяти с массивом операционных единиц, размещенных в устройстве накопления информации (УНИ) (14);
- блок запуска (БЗ) (менеджера приложений) (19) ПИК, снабженный специальным программным обеспечением (ПО), запускающего работу от I до N приложений (модулей), каждое из которых снабжено своим спец. ПО,
- включающий - модули от i… до n приложений, каждое из которых снабжено своим специальным ПО,
- блок калибровки приборов (22), осуществляющий запись и анализ характеристик измерительных приборов,
- блок привязки наблюдений (23), осуществляющий привязку системы источник - приемник в пространстве,
а плата сопровождения (20) включает в себя:
- блок редактирования (24) гидрографической информации
- и блок просмотра, редактирования и конвертации (25) для сравнения рядовых и контрольных наблюдений и построения планов - графиков ДНП, причем
плата запуска (17) начинает работать на начальном этапе работы ПИК и продолжает параллельно с рабочей платой (7) работать при снятии и автоматической обработке исследовательской информации блока ГИС (1). В частности, блок ГИС выполняют с возможностью подключения ИУ (6) в виде наземной установки типа дипольной установки линия - линия или ИУ типа петля - линия или с возможностью подключения ИУ в виде дипольной морской ИУ с несколькими приемными линиями. Кроме того, модуль привязки (8) дипольной установки к местности блока ГИС (1) включает, например, растровые карты, векторные карты и треки дорог. Коммутационный канал 2 (11в) обработанных УОИ (15) информационных сигналов и соединяющий АЦП (12) с УНИ (14) снабжен коммуникационными ветвями этого канала 2 (11в) в зависимости от количества секторов (зависящих от числа каналов, используемых в ИУ) модуля обработки (5) информационных сигналов, например модуль обработки (5) информационных сигналов включает следующие сектора:
- сектор устранения помех (26) в каждом массиве информационных сигналов по помехам с обеспечением контроля эффективности устранения помех по частоте, записанных в формате реляционных файлов типа Ak,
- сектор сжатия массивов (27) операционных единиц в пределах временных окон с логарифмическим шагом,
- сектор расчета КИХ фильтров (21) (фильтров с конечной импульсной характеристикой), необходимых для выполнения высокочастотной фильтрации,
- сектор устранения тренда (28), который удаляют на каждой временной задержке с использованием итерационного подхода с целью минимизации влияния выбросов и сбоев посредством применения высокочастотной фильтрации, записывающий результат измерения в формате реляционных файлов типа Вkв,
- сектор формирования массива операционных единиц (29),
- сектор повторной обработки сжатых массивов операционных единиц (30), записывающий результат измерений в формате реляционных файлов типа Аk с получением результатов измерений в формате реляционных файлов типа Ck, отражающих дифференциально-нормированные параметры (ДНП),
- сектор формирования итоговых массивов операционных единиц (31), записанных в формате реляционных файлов, отражающих итоговые кривые переходных процессов. При этом, например, сектор устранения помех (26) в каждом массиве информационных сигналов обеспечивает устранение помех по выбросам, возникающим от грозовых разрядов и перепадов напряжения в силовых линиях, промышленных периодических помех и высокочастотного шума; сектор формирования массива операционных единиц (29) записывает результат измерения в формате реляционных файлов типа Bk при условии работы ПИК на наземных ИУ типа линия - линия или ИУ типа петля - линия; или сектор формирования массива операционных единиц (29) записывает результат измерения в формате реляционных файлов типа Bk при условии работы ПИК на ДУ морского типа с несколькими приемными линиями. Кроме того, массивы операционных единиц посредством ветвей коммутационного канала 2 (11в) передаются следующим образом:
- массив операционных единиц в формате реляционных файлов типа Ak - в сектор устранения помех (26) и затем в сектор формирования массива операционных единиц (29) для морских ДУ или наземных ДУ модуля обработки УОИ (15);
- массив операционных единиц в формате реляционных файлов типа Ck - в сектор повторной обработки сжатых массивов операционных единиц (30) и затем в сектор формирования итоговых массивов операционных единиц (31) модуля обработки УОИ (15).
Также, в частности, блок редактирования гидрографической информации (24) включает в себя следующие модули:
- модуль устранения ошибок и сбоев в гидрографических данных (32), их объединение и приведение их к единой временной сетке электромагнитных зондирований;
- модуль определения границ интервалов (33), на которых производится пространственное осреднение данных электромагнитных зондирований и гидрографической информации;
- модуль расчета кажущегося удельного электрического сопротивления (34) для движущейся измерительной системы с одной генераторной линией и несколькими приемными линиями;
- модуль сравнения результатов электромагнитных наблюдений и гидрографических данных (35) для двукратных проходов по одному и тому же профилю.
- Кроме того, в массивах операционных единиц (массивах исходных данных) устройства накопления информации (УНИ) (14) в блоке хранения текущего массива измерительных данных (БХТМ ИД) (18) выделены файловые и реляционные массивы. При этом, например, реляционные массивы (36) операционных единиц в массиве исходных данных содержат:
- массив исходных характеристик работ: заказчик, номер работы, площадь работ, профиль измерения;
- массив характеристик внешних устройств: вид, количество операторов, вид коммутирующих связей с ними;
- массив характеристик измерительной аппаратуры: вид измерительных приборов, калибровочные коэффициенты и поправки;
- массив характеристик каждого пикета от А до Н для конкретного вида ДУ - координаты элементов измерительной системы на точке записи электромагнитного зондирования (пикета) или координаты точки привязки пункта наблюдения;
- массив характеристик номеров наблюдений от a до h - записи уникальных номеров наблюдений в каждом пикете, связанный с массивом исходных характеристик работ для массива информации по привязке наблюдений;
- массив характеристик файлов с исходной информацией, которые хранятся в файловом массиве (37) исходных данных, содержат путь, по которому в файловом формате будут сохраняться в файловом блоке хранения исходных данных.
Кроме того, файловые массивы (37) операционных единиц в модуле хранения исходных данных (4) содержат:
- массив первичной информации по реляционным массивам операционных единиц;
- массив информации о переходных процессах, являющийся массивом первичных данных с АЦП;
- массив информации по привязке наблюдений;
- массив информации результатов обработки первичной информации;
- массив результатов обработки - расчет кривых (функций) дифференциально-нормированных параметров (ДНП).
Схема программно-измерительного комплекса (ПИК) поясняется, но его работа не исчерпывается следующими чертежами.
На Фиг.1 изображена общая блок-схема ПИК.
На Фиг.2 показаны информационные потоки по коммуникационным каналам в ГИС.
На Фиг.3 показана плата запуска и составляющие ее блоки.
На Фиг.4 показана рабочая плата ГИС с модулями и секторами модуля обработки информационных сигналов.
На Фиг.5 показана схема взаимодействия модулей ГИС и внешних устройств.
Система работает следующим образом.
С разработкой морской модификации измерительных систем и значительным увеличением объемов измеренных величин при геологических работах, когда количество записанных за полевой сезон точек стало исчисляться тысячами, возникла необходимость в создании новой реляционной структуры файлов. Наравне с ней остается и файловая структура, необходимая для хранения значительных объемов первичной (полевой) информации - первичных данных электромагнитных зондирований, данных с внешних устройств (GPS, эхолот, датчики глубины и др.). Обработка такого объема данных должна проводиться в автоматическом режиме и, следовательно, осуществляться хранение исходной информации и координация работы блоков и модулей такой новой программно-измерительной системы. Ее работа организована на платформе Microsoft SQL Server и объединена в блоке хранения текущего массива измерительных данных (БХТМ ИД) (18), состоящем из модулей исходных данных двух видов - файловых и реляционных, содержащих элементы памяти с массивом операционных единиц, размещенных в устройстве накопления информации (УНИ) (14), т.е. реляционный массив исходной информации и файловый массив исходной информации. Другой файловый массив также размещается в модуле хранения измеренных данных (4) УНИ (14).
Существуют модификации комплекса для наземных зондирований дипольной установкой, установкой с двумя приемными линиями и генераторной петлей, а также для морских дипольных зондирований.
Работу ПИК для наземных и морских измерительных установок следует описывать отдельно.
Сбор и обработка данных в ПИК для наземных установок линия - линия и петля - линия отличаются незначительно, поэтому для них приводится одно описание.
Все блоки программно-измерительного комплекса запускаются с платы запуска (17) с вшитым программным обеспечением, работа которой синхронизирована с БХТМ ИД (18). Перед началом работ запускается работа выбранного блока от I до N менеджера приложений (21) и в файловом формате в УОИ (15) размещаются массивы информации о заказчике, площади работ и профилях, указываются операторы, измерительные приборы и в блоке калибровке приборов (22) массив калибровочных данных по приборам. С помощью модуля привязки измерительной установки (ИУ) (8) блока ГИС (1) проектируют положение ИУ на местности, используя растровые и векторные карты, а также отснятые с помощью GPS-приемников треки дорог. Этим же модулем привязки (8) в модуле хранения измеренных данных (4) сохраняются координаты электродов ИУ для каждого пикета. На точке записи в модулях от i… до n приложений, каждое из которых снабжено своим специальным ПО, в БХТМ ИД (18) создается уникальный массив операционных единиц, соответствующий наблюдению на данной точке, и в файловом формате, например, .INI формируют массив исходных данных. Затем, посредством АЦП (12) под управлением модуля сбора данных (9) сигнал с приемной линии в виде массива бинарных файлов (исходных данных) поступает на элемент памяти, например жесткий диск УНИ (14) массива БХТМ ИД (18) в файловом формате. При необходимости, из этих массивов бинарных файлов с помощью блока просмотра, редактирования, конвертации (25) платы сопровождения (20) удаляются массивы с аномальным уровнем помех. Далее начинают работать в массиве в котором на каждом накоплении исходных данных модуль обработки информационных сигналов (исходных данных) (5) посредством секторов устранения помех (26) подавляют такие помехи, как: выбросы, возникшие от грозовых разрядов и перепадов напряжения в силовых линиях, промышленные периодические помехи и высокочастотный шум. Эффективность устранения помех контролируется в частотной области. Обработанные переходные процессы сохраняются в массивах исходных данных, количество которых определяется числом каналов k-Ak. Затем выполняют посредством сектора сжатия массивов (27) сжатие данных в пределах расположенных с логарифмическим шагом временных окон в пакеты операционных единиц. На следующем этапе устраняют тренд посредством сектора устранения трендов (28) и сжатые данные сохраняются в массивы исходных данных Bk. При обработке исходных данных массивы Bk, в зависимости от модификации ИУ, поступают на вход сектора формирования итогового массива операционных единиц (31) для ИУ типа линия - линия или ИУ типа петля - линия. В этом модуле получают итоговые кривые переходных процессов и дифференциально-нормированных параметров (ДНП), которые затем размещают в модулях исходных данных файлового типа формата ASCII, например, .prn.
При данных способах сбора и обработки исходных данных требуется значительное машинное время, которое, однако, обеспечивает увеличение объемов массивов измеренных данных для каждого временного цикла измерений, что в результате дает повышение качества итоговых кривых. Для достижения более высокого соотношения сигнал/помеха применяется модуль повторной обработки сжатых массивов операционных единиц (2D обработки) (30), в котором обрабатываются массивы Ak, в то время как массивы операционных единиц со сжатыми исходными данными Bk используют только для отображения состояния измеренных данных на входе модуля обработки (5). На выходе модуля обработки (5) сохраняются обработанные данные, а сжатые данные рассчитываются заново и сохраняются в массивах Сk. Итоговые кривые ДНП размещают в массивах исходных данных в текстовых (бинарных) форматах, из которого посредством модуля передачи данных по каждому выбранному массиву операционных единиц (10) поступают в реляционный модуль исходных данных БХТМ ИД (18). Обработка данных по профилям идет в автоматическом режиме, все промежуточные массивы операционных единиц сохраняются с уникальными именами в файловом каталоге Source. После завершения цикла обработки, эти массивы посредством модуля редактирования (16) просматривают для анализа результатов, после чего, при необходимости, изменяют настройки модуля обработки (5) и осуществляется новая обработка массива исходных данных. В секторе формирования массива операционных единиц (29) и секторе повторной обработки сжатых массивов операционных единиц (2D обработки) (30) осуществляют через один и тот же сектор устранения трендов (28), в котором предусмотрена возможность выбора фильтров. Коэффициенты фильтров рассчитываются в модуле расчета КИХ фильтров (фильтров с Конечной Импульсной характеристикой) (21).
В морской модификации программно-измерительного комплекса, которая является более сложной, чем наземная, совместно с переходными процессами обрабатываются гидрографические данные.
Так же, как и в наземных ИУ, все модули запускаются с платы запуска (17) с вшитым программным обеспечением, работа которой синхронизирована с БХТМ ИД (18). Перед началом работ запускается работа выбранного блока от I до N менеджера приложений (19) и в файловом формате в УОИ (15) размещаются массивы информации о заказчике, площади работ и профилях, указываются операторы, измерительные приборы и соответствующий им из блока калибровки приборов (22) массив калибровочных данных по приборам. В модуле привязки (8) модуля хранения измеренных данных (4), в модулях от i… до n приложений, каждое из которых снабжено своим специальным ПО, в БХТМ ИД (18) создается уникальный массив операционных единиц бинарных файлов исходных данных в формате .INI. Кроме того, через модуль сбора данных (9) (Море) в БХТМ ИД вносят массив операционных единиц с конфигурацией измерительной установки и все исходные данные о характеристиках наблюдения. В модуль ГИС (1) посредством модуля привязки (8) (Море) на элемент памяти УНИ (14) в БХТМ ИД (18) загружают массив операционных единиц с координатами проектных профилей, растровые и векторизованные карты. Во время прохождения профиля модуль привязки измерительной установки (8) собирает исходные данные с нескольких GPS-приемников, датчиков глубины, эхолота и мультиметра, с помощью которого измеряется ток. Во время измерений переходных процессов этим модулем формируется пакет данных с гидрографической информацией, соответствующий измеряемому переходному процессу. Блок ГИС (1) модуля привязки (8) передает этот пакет массивов операционных единиц в модуль сбора данных (9), который посредством АЦП (12) передает в УНИ исходные данные о переходных процессах.
После окончания записи на профиле массив исходных данных передают в УОИ (15), где и происходит их обработка. Так же, как и для наземной ИУ, блок редактирования гидрографической информации (24) устраняет ошибки и сбои модулем устранения ошибок и сбоев гидрографической информации (32) в исходных данных, после чего последовательно модуль обработки информационных сигналов (исходных данных) (5) осуществляет в модулях устранения помех (26), сжатия массивов (27), устранения трендов (28), сектором формирования массива операционных единиц (29) формируют массивы во временных окнах и исходные данные сглаживаются (редактируются, их аппроксимируют) в секторе повторной обработки сжатых массивов операционных единиц (30) и размещаются в массивы операционных единиц Ck. Полный граф обработки выполняется в точности так же, как в наземной модификации.
Поскольку гидрографические данные поступают из различных источников - внешних приборов измерения, в массивах исходных данных различных форматов и с различным шагом по времени посредством модуля редактирования гидрографической информации (24), эти данные приводятся к единой временной сетке, в которой регистрируются переходные процессы. В результате каждому переходному процессу из массива исходных данных Ck ставится в соответствие гидрографическая информация, в которой обработаны и устранены всевозможные сбои, выполнены пересчеты координат и введены необходимые поправки. Все эти данные сопоставляются в модуле определения границ интервалов (33), где непрерывная запись по профилю разбивается на интервалы с требуемым шагом. На выходе этого модуля создаются массивы исходных данных (операционных единиц) Ck, в которых гидрографические данные увязаны со сжатыми во временные окна переходными процессами, а также в массив операционных единиц в формате ASCII типа .txt, где указаны границы интервалов и обработанная в этих пределах гидрографическая информация.
Следующим шагом с использованием массива операционных единиц типа .txt и массива Ck в секторе формирования итоговых массивов операционных единиц (31) для каждого интервала рассчитываются итоговые кривые переходных процессов и дифференциально-нормированных параметров (ДНП).
Итоговые кривые ДНП размещают в массивах исходных данных в текстовых (бинарных) форматах, из которого посредством модуля передачи данных по каждому выбранному массиву операционных единиц (10) поступают в реляционный модуль исходных данных БХТМ ИД (18).
Массивы исходных данных Ck в дальнейшем используют в модуле сравнения результатов электромагнитных наблюдений и гидрографических данных (35) (Море), а также для картирования по временным задержкам и гидрографическим данным. Модуль сравнения результатов электромагнитных наблюдений и гидрографических данных (35) (Море) позволяет сопоставить результаты различных наблюдений на профиле, независимо от того, в каком направлении он проходился, контроль осуществляется при повторном прохождении профиля.
Используя показания датчика тока и разности потенциалов между электродами на приемной линии во время его пропускания, в модуле расчета кажущегося удельного электрического сопротивления (34) вычисляется кажущееся сопротивление разреза. Результаты преобразования исходных данных также сопоставляются с гидрографическими данными и сохраняются в массивах операционных единиц в текстовом (бинарном) формате в файловый массив исходной информации БХТМ ИД (18).
Обработка данных по профилям идет в автоматическом режиме, все промежуточные массивы исходных данных сохраняют в массиве Source с уникальными именами операционных единиц. После завершения цикла обработки, эти массивы следует просмотреть через блок просмотра, редактирования, конвертации (25) результатов обработки для анализа промежуточных результатов, после чего возможно осуществить изменение настроек и обработку исходных данных.
В секторе формирования массива операционных единиц (29) и секторе повторной обработки сжатых массивов операционных единиц (2D обработки) (30) осуществляют через один и тот же сектор устранения трендов (28), в котором предусмотрена возможность выбора фильтров. Коэффициенты фильтров рассчитываются в модуле расчета КИХ фильтров (фильтров с Конечной Импульсной характеристикой) (21).
Для визуализации содержимого БХТМ ИД используют блок просмотра, редактирования, конвертации (25). В нем отражаются все имеющиеся массивы исходных данных по точкам записи, а также с его помощью можно построить планы графиков по профилю, рассчитать сходимость рядовых и контрольных измерений, оценить идентичность измерительных приборов и т.д.
Для размещения исходных данных из блока хранения измеренных данных (4) в УОИ (15) из реляционного массива исходной информации БХТМ ИД (18) конвертируют часть файлового массива исходной информации БХТМ ИД (18) в массив формата текстовых файлов ASCII. Массив в этом формате передается заказчику, поскольку он не зависит от программно-измерительного комплекса и удобен для просмотра на других ЭВМ с другим программным обеспечением.
С целью достижения стабильности работы измерительные модули ежемесячно калибруются. К модулю АЦП подключают блок калибровки приборов (22), в котором генерируется последовательность разнополярных прямоугольных импульсов с известной амплитудой. В модуле сбора данных электромагнитных зондирований (9) меняют коэффициенты усиления измерительного оборудования ИУ, для каждого коэффициента в файловом массиве исходной информации (данных) БХТМ ИД записывают свой массив исходных данных в бинарном формате. Предварительно рассчитывают калибровочные константы и сохраняют их в блоке хранения измеренных данных (БХЧ ИД) (4) и в файловом массиве исходной информации (данных) в БХТМ ИД (18). Если отклонения превышают допустимые значения, то из файлового массива исходной информации (данных) в БХТМ ИД (18) массив с этими константами загружается в модуль сбора данных (9), который при полевой записи сохраняет константы в массиве исходных данных. Также есть возможность просмотра и расчета статистик по измеряемым характеристикам выбранного прибора. Все блоки и их модули запускают платой запуска (17), работа которой синхронизирована с БХТМ ИД.
Сложившаяся структура программно-измерительного комплекса доказала свою высокую адаптивность к постоянно меняющимся требованиям. В то же время достигнута высокая производительность полевых и камеральных работ. В перспективе, вместе с совершенствованием отдельных модулей планируется создание сервисных блоков и модулей для геологического отдела, включающих статистический анализ и отображение данных в модулях геоинформационных систем.
Поскольку метод ДНМЭ относится к импульсным методам электроразведки, то его осуществление требует перехода с аналоговой аппаратуры на цифровую. Например, за основу можно взять сейсмическое 24-разрядное сигма - дельта АЦП фирмы Crystall CS5321. В результате на его основе создан данный программно-измерительный комплекс (ПИК), который предназначен для сбора, хранения и обработки данных электромагнитных зондирований, который с минимальными затратами может быть адаптирован для любого импульсного метода, для информационных носителей на платформе Microsoft SQL Selver. В ПИК можно использовать следующую силовую аппаратуру: транзисторный инвертор, который преобразует постоянный ток генератора в разнополярные импульсы с интервалом разной длительности импульса; плату управления и защиты на основе программно-логической интегральной схемы (ПЛИС), например, американской фирмы ALTERA. В ее основе используется «жесткая» логика и возможность ее настройки на выполнение заданных функций. При изменении логики или вшитых в плату программ используют САПР MAX +PLUS II, представляющую собой интегрированную среду для разработки цифровых устройств на базе программно-логических интегральных схем фирмы ALTERA. При этом в ПИК формируют управляющие сигналы, в которых сигнал (исходные данные) синхронизированы и преобразуются таким образом, чтобы получить необходимую форму тока, нужной длительности и полярности, в питающей линии ИУ. А при превышении напряжения формирует сигнал ошибки, который выключает исполнительные модули посредством реле защиты. В ПИК также применяют интегральный силовой мост IGBT SkiiP. Для осуществления работы ПИК используется приемная аппаратура - ГИС, которая выполняет функции для ПИК по представленным на чертежах блок-схемам. Так, блок привязки наблюдений (23) осуществляет сбор геодезической, гидрографической и прочей информации, выполняя привязку системы источник - приемник в пространстве. Кривые ДНП из реляционного массива исходной информации поступают в блоки обработки данных (2) и (3), где осуществляется инверсия в рамках одномерной проводящей поляризующейся модели с использованием нескольких операций - Нелдера-Миды, главных осей и глобальной минимизации. Дальнейшее развитие ПИК связано с усовершенствованием отдельных модулей.
Таким образом, обеспечивается увеличение объемов массивов измеренных данных для каждого временного цикла измерений, представленного в операционных единицах для пакетной передачи данных в требуемом формате, пригодном для последующих операций преобразования, увеличение количества одновременно обрабатываемых массивов данных (быстродействие комплекса) и универсальность ПИК для разных схем геофизических зондирований.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ И ОБРАБОТКИ ПЕРЕХОДНЫХ ПРОЦЕССОВ С ЗАЗЕМЛЕННОЙ ЛИНИЕЙ ПРИ ИМПУЛЬСНОМ ВОЗБУЖДЕНИИ ПОЛЯ ЭЛЕКТРИЧЕСКИМ ДИПОЛЕМ С ЦЕЛЬЮ ПОСТРОЕНИЯ ГЕОЭЛЕКТРИЧЕСКИХ РАЗРЕЗОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА С ПОМОЩЬЮ АППАРАТНО-ПРОГРАММНОГО ЭЛЕКТРОРАЗВЕДОЧНОГО КОМПЛЕКСА (АПЭК "МАРС") | 2012 |
|
RU2574861C2 |
| Способ геоэлектроразведки и устройство для его осуществления | 2020 |
|
RU2752557C1 |
| Специализированный программно-аппаратный комплекс автоматизированного проектирования радиолокационных станций, комплексов и систем, а также их компонентов (СПАК) | 2021 |
|
RU2778139C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ ПЛАН-СХЕМЫ ОБЪЕКТОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2612326C2 |
| СПОСОБ СОЗДАНИЯ ВИТРИНЫ ДАННЫХ | 2024 |
|
RU2840319C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ПРОГРАММА ОБРАБОТКИ ИНФОРМАЦИИ | 2007 |
|
RU2419869C2 |
| НОСИТЕЛЬ ЗАПИСИ, УСТРОЙСТВО ДЛЯ ЗАПИСИ ДАННЫХ НА НОСИТЕЛЕ ЗАПИСИ, УСТРОЙСТВО ДЛЯ РЕДАКТИРОВАНИЯ ДАННЫХ, ЗАПИСЫВАЕМЫХ НА НОСИТЕЛЕ ЗАПИСИ, И СПОСОБ ЗАПИСИ ДАННЫХ НА НОСИТЕЛЕ ЗАПИСИ (ВАРИАНТЫ) | 2000 |
|
RU2239244C2 |
Изобретение относится к области геофизики и может быть использовано для обработки сухопутных и морских геолого-разведочных данных электромагнитных зондирований. Программно-измерительный комплекс (ПИК), содержащий геофизическую измерительную систему (ГИС), связанную с блоками обработки данных, один из которых совмещен с модулем хранения данных, а второй - с блоком управления. К ГИС подключены измерительные установки (ИУ). ГИС размещена на рабочей плате. Рабочая плата включает модуль привязки измерительной установки к местности, модуль сбора данных электромагнитных зондирований, модуль передачи данных. ГИС снабжен тремя коммутационными каналами. ПИК также содержит плату запуска и плату сопровождения. Плата запуска включает блок калибровки приборов, блок привязки наблюдений и модули приложений со специальным ПО. Плата сопровождения содержит блок редактирования гидрографической информации и блок просмотра, редактирования и конвертации для сравнения рядовых и контрольных наблюдений и построения графиков. Технический результат: увеличение объемов массивов измеренных данных для каждого временного цикла измерений, а также универсальность комплекса, позволяющая использовать его для разных схем геофизических зондирований. 13 з.п. ф-лы, 5 ил.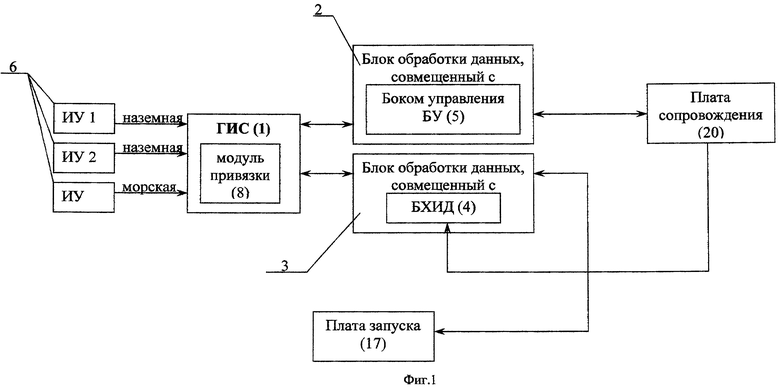
1. Программно-измерительный комплекс (ПИК), содержащий геофизическую измерительную систему (ГИС), связанную с блоками обработки данных, один из которых совмещен с модулем хранения данных, а второй - с блоком управления, и снабженных программным обеспечением, отличающийся тем, что к ГИС подключают измерительные установки (ИУ), ГИС размещена на рабочей плате, которая включает: модуль привязки измерительной установки к местности и получения дополнительной информации, модуль сбора данных электромагнитных зондирований, модуль передачи данных по каждому выбранному массиву первичных данных в блок хранения текущего массива измерительных данных (БХТМ ИД), АЦП типа дельта - сигма АЦП с большим динамическим диапазоном, для записи данных электромагнитных зондирований и внешние устройства, обеспечивающие дополнительной информацией об измерительной системе, совместно являющиеся управляющим блоком, снабженным специальным программным обеспечением (ПО), устройство накопления информации (УНИ) и устройство обработки информации (УОИ), включающее модуль редактирования, снабженный специальным ПО, и модуль обработки информационных сигналов, ГИС снабжен, по крайней мере, тремя коммутационными каналами: коммутационный канал 1 информационных сигналов, соединяющий АЦП с УНИ и обеспечивающий передачу массива операционных единиц во внутреннем бинарном формате, разработанном для хранения исходных данных электромагнитных зондирований, коммутационный канал 2 информационных сигналов, соединяющий АЦП с УНИ и обеспечивающий передачу собранной дополнительной информации с внешних устройств, и коммутационный канал 3 обработанных УОИ информационных сигналов, ПИК дополнительно содержит плату запуска, посредством которой работа блока запуска синхронизирована с работой блока хранения текущего массива измерительных данных (БХТМ ИД) и плату сопровождения, которая обеспечивает посредством модуля привязки блока ГИС привязку ИУ к картам и редактирование массива операционных единиц в формате бинарных файлов в УНИ, при этом обеспечивая стабильность получения результатов путем применения методов робастной статистики, при этом плата запуска включает в себя блок хранения текущего массива измерительных данных (БХТМ ИД), состоящий из массивов исходных данных двух видов - файловые и реляционные, содержащих элементы памяти с массивом операционных единиц, размещенных в устройстве накопления информации (УНИ), блок запуска (БЗ) менеджера приложений ПИК, снабженный специальным программным обеспечением (ПО), запускающим работу от 1 до N модулей приложений, каждое из которых снабжено своим специальным ПО; блок калибровки приборов, осуществляющий запись и анализ характеристик измерительных приборов; блок привязки наблюдений, осуществляющий привязку системы источник - приемник в пространстве, а плата сопровождения включает в себя блок редактирования гидрографической информации и блок просмотра, редактирования и конвертации для сравнения рядовых и контрольных наблюдений и построения планов - графиков ДНП, причем плата запуска начинает работать на начальном этапе работы ПИК и продолжает параллельно с рабочей платой работать при снятии и автоматической обработке исследовательской информации блока ГИС.
2. ПИК по п.1, отличающийся тем, что блок ГИС выполнен с возможностью подключения ИУ в виде наземной установки типа дипольной установки линия - линия или ИУ типа петля - линия.
3. ПИК по п.1, отличающийся тем, что по блок ГИС выполнен с возможностью подключения ИУ в виде дипольной морской ИУ с несколькими приемными линиями.
4. ПИК по п.1, отличающийся тем, что модуль привязки дипольной установки к местности блока ГИС включает растровые карты, векторные карты и треки дорог.
5. ПИК по п.1, отличающийся тем, что коммутационный канал 2 обработанных УОИ информационных сигналов, соединяющий АЦП 2 с УНИ, снабжен k коммуникационными ветвями этого канала 2 в зависимости от количества секторов модуля обработки информационных сигналов.
6. ПИК по п.5, отличающийся тем, что модуль обработки информационных сигналов устройства обработки информации (УОИ) включает сектора: сектор устранения помех в каждом массиве информационных сигналов по помехам с обеспечением контроля эффективности устранения помех по частоте, записанных в формате реляционных файлов типа Ak; сектор сжатия массивов операционных единиц в пределах временных окон с логарифмическим шагом; сектор расчета КИХ фильтров (21) (фильтров с конечной импульсной характеристикой), необходимых для выполнения высокочастотной фильтрации; сектор устранения тренда, который удаляют на каждой временной задержке с использованием итерационного подхода с целью минимизации влияния выбросов и сбоев посредством применения высокочастотной фильтрации, записывающий результат измерения в формате реляционных файлов типа Bkв; сектор формирования массива операционных единиц; сектор повторной обработки сжатых массивов операционных единиц, записывающий результат измерений в формате реляционных файлов типа Ak с получением результатов измерений в формате реляционных файлов типа Ck, отражающих дифференциально-нормированные параметры (ДНП); сектор формирования итоговых массивов операционных единиц, записанных в формате реляционных файлов, отражающих итоговые кривые переходных процессов.
7. ПИК по п.6, отличающийся тем, что сектор устранения помех в каждом массиве информационных сигналов обеспечивает устранение помех по выбросам, возникающим от грозовых разрядов и перепадов напряжения в силовых линиях, промышленных периодических помех и высокочастотного шума.
8. ПИК по п.6, отличающийся тем, что сектор формирования массива операционных единиц записывает результат измерения в формате реляционных файлов типа B при условии работы ПИК на наземных ИУ типа линия - линия или ИУ типа петля - линия.
9. ПИК по п.6, отличающийся тем, что сектор формирования массива операционных единиц записывает результат измерения в формате реляционных файлов типа Bk при условии работы ПИК на ДУ морского типа с несколькими приемными линиями.
10. ПИК по п.1, отличающийся тем, что массивы операционных единиц посредством ветвей коммутационного канала 2 передаются: массив операционных единиц в формате реляционных файлов типа Ak - в сектор устранения помех и затем в сектор формирования массива операционных единиц для морских ДУ или наземных ДУ модуля обработки УОИ; массив операционных единиц в формате реляционных файлов типа Ck - в сектор повторной обработки сжатых массивов операционных единиц и затем в сектор формирования итоговых массивов операционных единиц модуля обработки УОИ.
11. ПИК по п.1, отличающийся тем, что блок редактирования гидрографической информации включает в себя: модуль устранения ошибок и сбоев в гидрографических данных, их объединение и приведение их к единой временной сетке электромагнитных зондирований; модуль определения границ интервалов, на которых производится пространственное осреднение данных электромагнитных зондирований и гидрографической информации; модуль расчета кажущегося удельного электрического сопротивления для движущейся измерительной системы с одной генераторной линией и несколькими приемными линиями; модуль сравнения результатов электромагнитных наблюдений и гидрографических данных для двукратных проходов по одному и тому же профилю.
12. ПИК по п.1, отличающийся тем, что в массивах операционных единиц устройства накопления информации (УНИ) в блоке хранения текущего массива измерительных данных (БХТМ ИД) выделены файловые и реляционные массивы.
13. ПИК по п.12, отличающийся тем, что реляционные массивы операционных единиц в модуле исходных данных содержат: массив исходных характеристик работ: заказчик, номер работы, площадь работ, профиль измерения; массив характеристик внешних устройств: вид, количество операторов, вид коммутирующих связей с ними; массив характеристик измерительной аппаратуры: вид измерительных приборов, калибровочные коэффициенты и поправки; массив характеристик каждого пикета от А до Н для конкретного вида ДУ - координаты элементов измерительной системы на точке записи электромагнитного зондирования (пикета) или координаты точки привязки пункта наблюдения; массив характеристик номеров наблюдений от а до h: записи уникальных номеров наблюдений в каждом пикете, связанный с массивом исходных характеристик работ для массива информации по привязке наблюдений; массив характеристик файлов с исходной информацией, которые хранятся в файловом модуле исходных данных: путь, по которому в файловом формате будут сохраняться данные в файловом блоке хранения исходных данных (БХИД).
14. ПИК по п.12, отличающийся тем, что файловые массивы операционных единиц в модуле исходных данных содержат: массив первичной информации по реляционным массивам операционных единиц - массив информации о переходных процессах, являющийся массивом первичных данных с АЦП; массив информации по привязке наблюдений; массив информации результатов обработки первичной информации; массив результатов обработки - расчет кривых (функций) дифференциально-нормированных параметров (ДНП).
| ГЕОФИЗИЧЕСКАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ | 1994 |
|
RU2091820C1 |
| СПОСОБ НИЗКОЧАСТОТНОГО СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ (ВАРИАНТЫ) | 2006 |
|
RU2336541C2 |
| Связующее для минераловатных плит | 1974 |
|
SU516662A1 |
| US 6219620 B1, 17.04.2001. | |||

