Изобретение относится к робототехнике и может быть использовано при создании систем управления приводами роботов.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и двигатель с редуктором, кинематически связанный с первым датчиком скорости и первым датчиком положения, выход которого подключен к первому входу первого сумматора, соединенного вторым входом с входом устройства, а третьим входом - с выходом первого датчика скорости, с входом релейного элемента и первыми входами второго блока умножения и третьего сумматора, второй вход которого подключен к выходу второго блока умножения, третий вход - к выходу релейного элемента, а выход - к второму входу второго сумматора, последовательно соединенные второй датчик положения, четвертый сумматор, пятый сумматор, первый квадратор, третий блок умножения и шестой сумматор, выход которого подключен к второму входу первого блока умножения, второй вход - к выходу первого задатчика сигнала, а третий вход - к выходу второго квадратора, а также последовательно соединенные датчик массы, четвертый блок умножения, седьмой сумматор и пятый блок умножения, подключенный вторым входом к выходу второго датчика скорости, а выходом - к второму входу второго блока умножения, второй вход пятого сумматора соединен с выходом второго задатчика сигнала, выход - с вторым входом четвертого блока умножения, а первый вход - с входом второго квадратора и вторым входом седьмого сумматора, выход датчика массы подключен к второму входу третьего блока умножения, а выход третьего задатчика сигнала соединен с вторым входом четвертого сумматора, последовательно соединенные кинематически связанный с выходным валом двигателя первый датчик ускорения, шестой блок умножения и восьмой сумматор, последовательно подключенные четвертый задатчик сигнала, девятый сумматор, седьмой блок умножения, десятый сумматор и восьмой блок умножения, а также последовательно соединенные второй датчик ускорения и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к второму входу десятого сумматора, второй вход восьмого сумматора соединен с выходом первого датчика ускорения, выход - с четвертым входом третьего сумматора, а третий вход - с выходом восьмого блока умножения, подключенного вторым входом к выходу первого датчика скорости, второй вход шестого блока умножения соединен с выходом пятого блока умножения, второй вход девятого сумматора подключен к выходу датчика массы, а выход второго датчика скорости через третий квадратор соединен с вторым входом седьмого блока умножения, последовательно соединенные косинусный функциональный преобразователь, десятый и одиннадцатый блоки умножения, причем выход последнего подключен к пятому входу третьего сумматора, последовательно соединенные синусный функциональный преобразователь, вход которого подключен к входу косинусного функционального преобразователя и к выходу первого датчика положения, двенадцатый блок умножения, второй вход которого через тринадцатый блок умножения соединен с выходом первого датчика скорости, одиннадцатый сумматор и четырнадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора и второму входу одиннадцатого блока умножения, а выход - к четвертому входу восьмого сумматора, последовательно соединенные третий датчик ускорения, дифференциатор и пятнадцатый блок умножения, второй вход которого соединен с выходом косинусного функционального преобразователя, а выход - со вторым входом одиннадцатого сумматора, последовательно соединенные шестнадцатый блок умножения, первый и второй входы которого соответственно подключены к выходам второго датчика скорости и десятого блока умножения, и семнадцатый блок умножения, второй вход которого соединен с выходом девятого сумматора, а выход - с пятым входом восьмого сумматора, причем вторые входы десятого и тринадцатого блоков умножения подключены к выходу третьего датчика ускорения (см. патент РФ №2214327, БИ №29, 2003 г.).
Недостатком этого устройства является то, что оно эффективно только для исполнительного органа робота, имеющего четыре степени подвижности (выдвижение руки, поворот вертикальной стойки, вертикальное перемещение руки и одно горизонтальное перемещение всего манипулятора). Однако при этих четырех степенях подвижности у манипулятора мала рабочая зона (зона обслуживания). При введении еще одной пятой степени подвижности для перемещения манипулятора в горизонтальной плоскости в рассматриваемом приводе появляются дополнительные возмущающие моментные воздействия, значительно ухудшающие его показатели качества. В результате возникает задача компенсации этих вредных дополнительных моментных воздействий за счет введения дополнительных сигналов коррекции.
Известен также самонастраивающийся электропривод робота, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, третий сумматор, четвертый сумматор, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика сигнала, третий вход через второй квадратор - к выходу третьего сумматора, а выход - ко второму входу первого блока умножения, причем выход второго задатчика сигнала соединен со вторым входом четвертого сумматора, а выход третьего задатчика сигнала - со вторым входом третьего сумматора, последовательно соединенные третий блок умножения, первый и второй входы которого подключены соответственно к выходам датчика массы и четвертого сумматора, шестой сумматор, второй вход которого подключен к выходу третьего сумматора, четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, пятый блок умножения и седьмой сумматор, второй вход которого через релейный блок подключен к выходу первого датчика скорости, второму входу пятого блока умножения, первому входу восьмого сумматора и к своему третьему входу, последовательно соединенные косинусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, и шестой блок умножения, второй вход которого подключен к выходу первого датчика ускорения, а также седьмой блок умножения, второй вход которого подключен к выходу шестого сумматора, а выход - к четвертому входу седьмого сумматора, подключенного выходом ко второму входу первого сумматора, причем второй вход восьмого сумматора соединен с выходом второго сумматора, а выход - с первым входом первого блока умножения, последовательно соединенные синусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, восьмой блок умножения, второй вход которого подключен к выходу второго датчика ускорения, и девятый сумматор, второй вход которого подключен к выходу шестого блока умножения, а выход - к первому входу седьмого блока умножения (см. патент РФ №2380215, БИ №3, 2010 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению. Недостатком этого устройства является то, что в нем не учитывается, считаясь малой, электрическая постоянная времени рассматриваемого электродвигателя манипулятора. При учете указанной постоянной времени в этом электродвигателе появляются дополнительные возмущающие моментные воздействия, значительно ухудшающие его показатели качества. В результате возникает задача компенсации этих вредных дополнительных моментных воздействий за счет введения дополнительных сигналов коррекции.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении манипулятора по всем пяти рассматриваемым степеням подвижности и тем самым повышение динамической точности его управления.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает получение дополнительного моментного воздействия, компенсирующего вредное моментное воздействие со стороны остальных степеней подвижности на качественные показатели работы рассматриваемого электропривода с учетом электрической постоянной времени электродвигателя.
Поставленная задача решается тем, что в электропривод манипулятора, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, установленный в третьей степени подвижности манипулятора, третий сумматор, четвертый сумматор, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика сигнала, третий вход через второй квадратор - к выходу третьего сумматора, а выход - ко второму входу первого блока умножения, причем выход второго задатчика сигнала соединен со вторым входом четвертого сумматора, а выход третьего задатчика сигнала - со вторым входом третьего сумматора, последовательно соединенные третий блок умножения, первый и второй входы которого подключены соответственно к выходам датчика массы и четвертого сумматора, шестой сумматор, второй вход которого подключен к выходу третьего сумматора, четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, установленного в третьей степени подвижности манипулятора, пятый блок умножения и седьмой сумматор, второй вход которого через релейный блок подключен к выходу первого датчика скорости, второму входу пятого блока умножения, первому входу восьмого сумматора и к своему третьему входу, последовательно соединенные косинусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, и шестой блок умножения, второй вход которого подключен к выходу первого датчика ускорения, установленного в четвертой степени подвижности манипулятора, а также седьмой блок умножения, второй вход которого подключен к выходу шестого сумматора, а выход - к четвертому входу седьмого сумматора, подключенного выходом ко второму входу первого сумматора, причем второй вход восьмого сумматора соединен с выходом второго сумматора, а выход - с первым входом первого блока умножения, последовательно соединенные синусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, восьмой блок умножения, второй вход которого подключен к выходу второго датчика ускорения, установленного в пятой степени подвижности манипулятора, и девятый сумматор, второй вход которого подключен к выходу шестого блока умножения, а выход - к первому входу седьмого блока умножения, дополнительно вводятся последовательно соединенные третий датчик ускорения, механически связанный с выходным валом редуктора, и девятый блок умножения, второй вход которого подключен к выходу десятого сумматора, первый и второй входы которого подключены к выходам третьего задатчика сигнала и четвертого блока умножения соответственно, последовательно соединенные четвертый датчик ускорения, установленного в третьей степени подвижности манипулятора, десятый блок умножения, одиннадцатый сумматор и одиннадцатый блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к пятому входу седьмого сумматора, последовательно соединенные двенадцатый и тринадцатый блоки умножения, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены к выходам датчика массы и первого задатчика сигнала соответственно, и четырнадцатый блок умножения, второй вход которого через третий квадратор подключен к выходу второго датчика скорости и первому входу двенадцатого блока умножения, соединенного вторым входом с выходом девятого сумматора, а выход - ко второму входу одиннадцатого сумматора, последовательно соединенные первый дифференциатор, тринадцатый сумматор, второй вход которого подключен к выходу пятнадцатого блока умножения, шестнадцатый блок умножения, второй вход которого подключен к выходу косинусного функционального преобразователя, четырнадцатый сумматор и семнадцатый блок умножения, второй вход которого подключен к выходу шестого сумматора и второму входу десятого блока умножения, а выход - к шестому входу седьмого сумматора, его седьмой вход - к выходу девятого блока умножения, а восьмой - к выходу тринадцатого блока умножения, второй вход которого подключен к выходу двенадцатого сумматора, последовательно соединенные второй дифференциатор, вход которого подключен к выходу второго датчика ускорения и первому входу пятнадцатого блока умножения, пятнадцатый сумматор, второй вход которого подключен к выходу восемнадцатого блока умножения, первый вход которого соединен со входом первого дифференциатора и выходом первого датчика ускорения, а второй вход - со вторым входом пятнадцатого блока умножения и выходом первого датчика скорости, и девятнадцатый блок умножения, второй вход которого подключен к выходу синусного функционального преобразователя, а выход - ко второму входу четырнадцатого сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают высокую точность и устойчивость рассматриваемого электропривода манипулятора в условиях существенного изменения параметров его нагрузки.
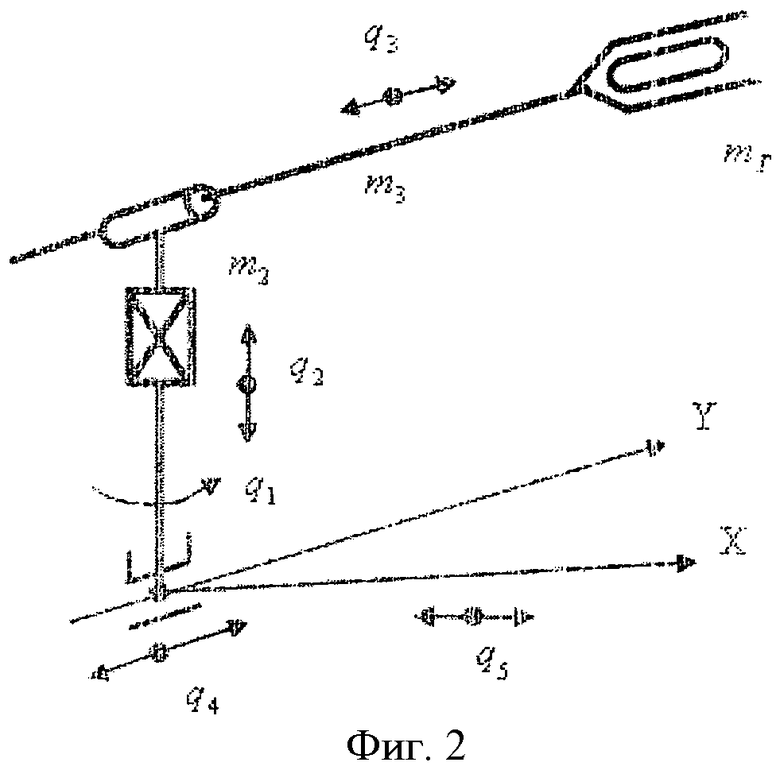
На фиг.1 представлена схема предлагаемого электропривода манипулятора, на фиг.2 - его кинематическая схема, а на фиг.3 - вид сверху в проекции на горизонтальную плоскость XY.
Электропривод манипулятора содержит последовательно соединенные первый блок 1 умножения, первый сумматор 2, усилитель 3 и электродвигатель 4, связанный с первым датчиком 5 скорости непосредственно и через редуктор 6 - с первым датчиком 7 положения, выход которого соединен с первым входом второго сумматора 8, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик 9 положения, установленный в третьей степени подвижности манипулятора, третий сумматор 10, четвертый сумматор 11, первый квадратор 12, второй блок 13 умножения, второй вход которого подключен к выходу датчика 14 массы и пятый сумматор 15, второй вход которого подключен к выходу первого задатчика 16 сигнала, третий вход через второй квадратор 17 - к выходу третьего сумматора 10, а выход - ко второму входу первого блока 1 умножения, причем выход второго задатчика 18 сигнала соединен со вторым входом четвертого сумматора 11, а выход третьего задатчика 19 сигнала - со вторым входом третьего сумматора 10, последовательно соединенные третий блок 20 умножения, первый и второй входы которого подключены соответственно к выходам датчика 14 массы и четвертого сумматора 11, шестой сумматор 21, второй вход которого подключен к выходу третьего сумматора 10, четвертый блок 22 умножения, второй вход которого подключен к выходу второго датчика 23 скорости, установленного в третьей степени подвижности манипулятора, пятый блок 24 умножения и седьмой сумматор 25, второй вход которого через релейный блок 26 подключен к выходу первого датчика 5 скорости, второму входу пятого блока 24 умножения, первому входу восьмого сумматора 27 и к своему третьему входу, последовательно соединенные косинусный функциональный преобразователь 28, подключенный входом к выходу первого датчика 7 положения, и шестой блок 29 умножения, второй вход которого подключен к выходу первого датчика 30 ускорения, установленного в четвертой степени подвижности манипулятора, а также седьмой блок 31 умножения, второй вход которого подключен к выходу шестого сумматора 21, а выход - к четвертому входу седьмого сумматора 25, подключенного выходом ко второму входу первого сумматора 2, причем второй вход восьмого сумматора 27 соединен с выходом второго сумматора 8, а выход - с первым входом первого блока 1 умножения, последовательно соединенные синусный функциональный преобразователь 32, подключенный входом к выходу первого датчика 7 положения, восьмой блок 33 умножения, второй вход которого подключен к выходу второго датчика 34 ускорения, установленного в пятой степени подвижности манипулятора, и девятый сумматор 35, второй вход которого подключен к выходу шестого блока 29 умножения, а выход - к первому входу седьмого блока 31 умножения, последовательно соединенные третий датчик 36 ускорения, механически связанный с выходным валом редуктора 6, и девятый блок 37 умножения, второй вход которого подключен к выходу десятого сумматора 38, первый и второй входы которого подключены к выходам третьего задатчика 19 сигнала и четвертого блока 22 умножения соответственно, последовательно соединенные четвертый датчик 39 ускорения, установленный в третьей степени подвижности манипулятора, десятый блок 40 умножения, одиннадцатый сумматор 41 и одиннадцатый блок 42 умножения, второй вход которого подключен к выходу первого датчика 5 скорости, а выход - к пятому входу седьмого сумматора 25, последовательно соединенные двенадцатый 43 и тринадцатый 44 блоки умножения, последовательно соединенные двенадцатый сумматор 45, первый и второй входы которого подключены к выходам датчика 14 массы и первого задатчика 16 сигнала соответственно, и четырнадцатый 46 блок умножения, второй вход которого через третий квадратор 47 подключен к выходу второго датчика 23 скорости и первому входу двенадцатого блока 43 умножения, соединенного вторым входом с выходом девятого сумматора 35, а выход - ко второму входу одиннадцатого сумматора 41, последовательно соединенные первый дифференциатор 48, тринадцатый сумматор 49, второй вход которого подключен к выходу пятнадцатого блока 50 умножения, шестнадцатый блок 51 умножения, второй вход которого подключен к выходу косинусного функционального преобразователя 28, четырнадцатый сумматор 52 и семнадцатый блок 53 умножения, второй вход которого подключен к выходу шестого сумматора 21 и второму входу десятого блока 40 умножения, а выход - к шестому входу седьмого сумматора 25, его седьмой вход - к выходу девятого блока 37 умножения, а восьмой - к выходу тринадцатого блока 44 умножения, второй вход которого подключен к выходу двенадцатого сумматора 45, последовательно соединенные второй дифференциатор 54, вход которого подключен к выходу второго датчика 34 ускорения и первому входу пятнадцатого блока 50 умножения, пятнадцатый сумматор 55, второй вход которого подключен к выходу восемнадцатого блока 56 умножения, первый вход которого соединен со входом первого дифференциатора 48 и выходом первого датчика 30 ускорения, а второй вход - со вторым входом пятнадцатого блока 50 умножения и выходом первого датчика 5 скорости, и девятнадцатый блок 57 умножения, второй вход которого подключен к выходу синусного функционального преобразователя 32, а выход - ко второму входу четырнадцатого сумматора 52. Объект управления 58.
На чертежах приведены следующие обозначения: αвх - сигнал с выхода программного устройства; ε - сигнал ошибки электропривода; U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем; qi - обобщенные координаты соответствующих степеней подвижности манипулятора  ; mi, mГ - массы соответствующих звеньев манипулятора и груза (i=2, 3); l3=const - расстояние от центра масс горизонтального звена до средней точки схвата;
; mi, mГ - массы соответствующих звеньев манипулятора и груза (i=2, 3); l3=const - расстояние от центра масс горизонтального звена до средней точки схвата;  - расстояния от оси вращения горизонтального звена до его центра масс при q3=0;
- расстояния от оси вращения горизонтального звена до его центра масс при q3=0;  - скорость изменения третьей обобщенной координаты;
- скорость изменения третьей обобщенной координаты;  - скорость вращения ротора электродвигателя первой степени подвижности манипулятора;
- скорость вращения ротора электродвигателя первой степени подвижности манипулятора;  ,
,  ,
,  ,
,  - ускорения в соответствующих степенях подвижности манипулятора.
- ускорения в соответствующих степенях подвижности манипулятора.
Рассматриваемый электропривод управляет поворотом вертикального звена манипулятора (обобщенная координата q1). Его конструкция позволяет осуществлять также выдвижение горизонтального звена (обобщенная координата q3), вертикальное прямолинейное перемещение горизонтального звена (обобщенная координата q2) и еще два линейных взаимно перпендикулярных перемещения манипулятора в горизонтальной плоскости (обобщенные координаты q4 и q5). Эта конструкция позволяет выполнять производственные операции в очень большой рабочей зоне.
Электропривод манипулятора работает следующим образом. На его вход подается воздействие αвх, обеспечивающее требуемый закон управления обобщенной координатой q1. На выходе сумматора 8 вырабатывается сигнал ошибки ε, который после коррекции в блоках 1, 2 и 27, усиливаясь, поступает на вход электродвигателя 4 с редуктором 6, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала U и внешнего моментного воздействия Mв на электропривод.
С помощью уравнения Лагранжа второго рода несложно показать, что в процессе движения манипулятора на электропривод рассматриваемого перемещения манипулятора действует момент

JS и JN - соответственно, моменты инерции вертикального звена манипулятора относительно продольной оси и горизонтального звена относительно поперечной оси, проходящей через его центр масс.
С учетом соотношения (1), (2), а также уравнения электрической  и механической
и механической  цепей электродвигателя постоянного тока независимого возбуждения или с постоянными магнитами рассматриваемый электропривод, управляющий координатой q1, можно описать следующим дифференциальным уравнением
цепей электродвигателя постоянного тока независимого возбуждения или с постоянными магнитами рассматриваемый электропривод, управляющий координатой q1, можно описать следующим дифференциальным уравнением  где R, L, i - соответственно, активное сопротивление, индуктивность и ток якорной цепи электродвигателя 4; J - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенный к валу электродвигателя; kм - коэффициент крутящего момента; Kω - коэффициент противо-ЭДС; kв - коэффициент вязкого трения; ip - передаточное отношение редуктора 6; Мстр - момент сухого трения; kу - коэффициент усиления усилителя 3;
где R, L, i - соответственно, активное сопротивление, индуктивность и ток якорной цепи электродвигателя 4; J - момент инерции якоря электродвигателя и вращающихся частей редуктора, приведенный к валу электродвигателя; kм - коэффициент крутящего момента; Kω - коэффициент противо-ЭДС; kв - коэффициент вязкого трения; ip - передаточное отношение редуктора 6; Мстр - момент сухого трения; kу - коэффициент усиления усилителя 3;  - ускорение вращения вала электродвигателя первой степени подвижности,
- ускорение вращения вала электродвигателя первой степени подвижности,

С учетом выражения (2) видно, что параметры уравнения (3), а следовательно, параметры и динамические свойства электропривода, управляющего координатой q1, являются существенно переменными, зависящими от непрерывного изменения координат q1, q3,  ,
,  , , , ,
, , , ,  ,
,  и массы захваченного груза mГ. Это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы. В связи с этим для качественного управления координатой q1 (для реализации поставленной выше задачи) необходимо точно компенсировать отрицательное влияние изменения координат q1, q3, , , , , , ,
и массы захваченного груза mГ. Это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы. В связи с этим для качественного управления координатой q1 (для реализации поставленной выше задачи) необходимо точно компенсировать отрицательное влияние изменения координат q1, q3, , , , , , ,  и mГ на динамические свойства рассматриваемого электропривода, т.е. необходимо сформировать такое корректирующее устройство, которое стабилизировало бы параметры этого электропривода таким образом, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
и mГ на динамические свойства рассматриваемого электропривода, т.е. необходимо сформировать такое корректирующее устройство, которое стабилизировало бы параметры этого электропривода таким образом, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Второй положительный вход сумматора 27 (со стороны сумматора 8) имеет единичный коэффициент усиления, а первый отрицательный вход - коэффициент усиления kω/kу. В результате на выходе сумматора 27 формируется сигнал  . Задатчик 19 вырабатывает сигнал, равный
. Задатчик 19 вырабатывает сигнал, равный  , а задатчик 18 - сигнал l3. Первые и вторые положительные входы сумматоров 10 и 11 имеют единичные коэффициенты усиления. Датчик 14 измеряет массу захваченного груза mГ. В результате на выходе сумматора 10 формируется сигнал, равный
, а задатчик 18 - сигнал l3. Первые и вторые положительные входы сумматоров 10 и 11 имеют единичные коэффициенты усиления. Датчик 14 измеряет массу захваченного груза mГ. В результате на выходе сумматора 10 формируется сигнал, равный  , на выходе сумматора 11 - сигнал
, на выходе сумматора 11 - сигнал  , на выходе блока 13 - сигнал
, на выходе блока 13 - сигнал  , а на выходе квадратора 17 - сигнал (l3+q3)2.
, а на выходе квадратора 17 - сигнал (l3+q3)2.
Первый (со стороны блока 13) и третий (со стороны квадратора 17) положительный входы сумматора 15 имеют коэффициенты усиления  и
и  соответственно (Jн - номинальное (желаемое) значение приведенного момента инерции, обеспечивающее рассматриваемому электроприводу заданные динамические свойства и качественные показатели). Причем с выхода задатчика 16 на второй положительный вход сумматора 15 с единичным коэффициентом усиления поступает сигнал, равный
соответственно (Jн - номинальное (желаемое) значение приведенного момента инерции, обеспечивающее рассматриваемому электроприводу заданные динамические свойства и качественные показатели). Причем с выхода задатчика 16 на второй положительный вход сумматора 15 с единичным коэффициентом усиления поступает сигнал, равный  . В результате на выходе сумматора 15 появляется сигнал, равный
. В результате на выходе сумматора 15 появляется сигнал, равный
 ,
,
а на выходе блока 1 - сигнал  .
.
Первый (со стороны блока 20) и второй положительные входы сумматора 21 имеют коэффициенты усиления  и
и  соответственно. Датчик 23 измеряет скорость
соответственно. Датчик 23 измеряет скорость  . В результате на выходе блока 22 формируется сигнал,
. В результате на выходе блока 22 формируется сигнал,  а на выходе блока 24 - сигнал
а на выходе блока 24 - сигнал  . Функциональные преобразователи 28 и 32 реализуют функции cosq1 и sinq1 соответственно. Датчики 30 и 34 измеряют ускорения
. Функциональные преобразователи 28 и 32 реализуют функции cosq1 и sinq1 соответственно. Датчики 30 и 34 измеряют ускорения  и
и  соответственно. Первый отрицательный (со стороны блока 33) и второй положительный входы сумматора 35 имеют коэффициенты усиления ip/2. В результате на выходе блока 31 формируется сигнал, равный
соответственно. Первый отрицательный (со стороны блока 33) и второй положительный входы сумматора 35 имеют коэффициенты усиления ip/2. В результате на выходе блока 31 формируется сигнал, равный

Датчик 36 измеряет ускорение  . Первый (со стороны задатчика 19) и второй положительные входы сумматора 38 соответственно имеют коэффициенты усиления, равные
. Первый (со стороны задатчика 19) и второй положительные входы сумматора 38 соответственно имеют коэффициенты усиления, равные  и 2Lip/R. В результате на выходе блока 37 формируется сигнал
и 2Lip/R. В результате на выходе блока 37 формируется сигнал  , который поступает на седьмой положительный вход сумматора 25, имеющий единичный коэффициент усиления.
, который поступает на седьмой положительный вход сумматора 25, имеющий единичный коэффициент усиления.
Первый положительный вход сумматора 45 (со стороны датчика 14) и его второй положительный вход соответственно имеют единичный коэффициент усиления и коэффициент усиления  . В результате на выходе блока 46 будет формироваться сигнал
. В результате на выходе блока 46 будет формироваться сигнал  . Датчик ускорения 39 измеряет
. Датчик ускорения 39 измеряет  . Первый (со стороны блока 40) и второй положительные входы сумматора 41 имеют коэффициенты усиления L/R и
. Первый (со стороны блока 40) и второй положительные входы сумматора 41 имеют коэффициенты усиления L/R и  соответственно. В результате на выходе блока 42 формируется сигнал
соответственно. В результате на выходе блока 42 формируется сигнал
 ,
,
который поступает на пятый положительный вход сумматора 25, имеющий единичный коэффициент усиления.
На выходе блока 44 формируется сигнал  , который поступает на восьмой положительный вход сумматора 25, имеющий коэффициент усиления L/(Rip).
, который поступает на восьмой положительный вход сумматора 25, имеющий коэффициент усиления L/(Rip).
Первый положительный (со стороны дифференциатора 48) вход сумматора 49 имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления 1/ip. В результате на выходе блока 51 формируется сигнал  . Первый (со стороны дифференциатора 54) и второй положительные входы сумматора 55 имеют единичный коэффициент усиления и коэффициент усиления, равный 1/ip соответственно. В результате на выходе блока 57 формируется сигнал
. Первый (со стороны дифференциатора 54) и второй положительные входы сумматора 55 имеют единичный коэффициент усиления и коэффициент усиления, равный 1/ip соответственно. В результате на выходе блока 57 формируется сигнал  . Первый положительный (со стороны блока 51) и второй отрицательный входы сумматора 52 имеют единичные коэффициенты усиления. В результате на выходе блока 53 формируется сигнал
. Первый положительный (со стороны блока 51) и второй отрицательный входы сумматора 52 имеют единичные коэффициенты усиления. В результате на выходе блока 53 формируется сигнал

который поступает на шестой положительный вход сумматора 25, имеющий коэффициент усиления, равный Lip/(2R).
Выходной сигнал блока 26 имеет вид: 
где  - величина момента сухого трения при движении электродвигателя.
- величина момента сухого трения при движении электродвигателя.
Первый, второй и четвертый положительные входы сумматора 25 (соответственно со стороны блоков 24, 26 и 31) имеют единичные коэффициенты усиления, а его третий положительный вход - коэффициент усиления (kмkω/R+kв). Поэтому на выходе сумматора 25 формируется сигнал 
Первый положительный вход сумматора 2 (со стороны блока 1) имеет единичный коэффициент усиления, а его второй положительный вход - коэффициент усиления, равный R/(kмkу). В результате на выходе сумматора 2 формируется сигнал
Несложно показать, что, поскольку  при движении электропривода достаточно точно соответствует Мстр=const, то
при движении электропривода достаточно точно соответствует Мстр=const, то  . Кроме того, в процессе эксплуатации электропривода можно также полагать, что kв≅const, a
. Кроме того, в процессе эксплуатации электропривода можно также полагать, что kв≅const, a  . В результате, подставив полученное значение U* из выражения (4) в выражение (3), будем иметь
. В результате, подставив полученное значение U* из выражения (4) в выражение (3), будем иметь

Очевидно, что уравнение (5) имеет постоянные желаемые параметры, а рассматриваемый электропривод, управляющий координатой q1, за счет введения рассмотренной выше самонастройки управляющего сигнала U* будет обладать постоянными желаемыми динамическими свойствами и качественными показателями, которые определяются выбором желаемых значений kу и JН.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2453892C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705734C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2019 |
|
RU2725447C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2562403C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705739C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2335389C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398673C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2325268C1 |

Изобретение относится к робототехнике, в частности к приводам манипуляторов. Электропривод манипулятора содержит блоки умножения, сумматоры, датчики положения, датчики скорости, квадраторы, датчик массы, усилитель, электродвигатель, задатчики сигнала, релейный блок, косинусный функциональный преобразователь, датчик ускорения, синусный функциональный преобразователь и дифференциатора, соединенные между собой в соответствии со прилагаемой схемой. Изобретение обеспечивает компенсацию вредного моментного воздействия со стороны остальных степеней подвижности. 3 ил.
Электропривод манипулятора, содержащий последовательно соединенные первый блок умножения, первый сумматор, усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор - с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, последовательно соединенные второй датчик положения, установленный в третьей степени подвижности манипулятора, третий сумматор, четвертый сумматор, первый квадратор, второй блок умножения, второй вход которого подключен к выходу датчика массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика сигнала, третий вход через второй квадратор - к выходу третьего сумматора, а выход - ко второму входу первого блока умножения, причем выход второго задатчика сигнала соединен со вторым входом четвертого сумматора, а выход третьего задатчика сигнала - со вторым входом третьего сумматора, последовательно соединенные третий блок умножения, первый и второй входы которого подключены соответственно к выходам датчика массы и четвертого сумматора, шестой сумматор, второй вход которого подключен к выходу третьего сумматора, четвертый блок умножения, второй вход которого подключен к выходу второго датчика скорости, установленного в третьей степени подвижности манипулятора, пятый блок умножения и седьмой сумматор, второй вход которого через релейный блок подключен к выходу первого датчика скорости, второму входу пятого блока умножения, первому входу восьмого сумматора и к своему третьему входу, последовательно соединенные косинусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, и шестой блок умножения, второй вход которого подключен к выходу первого датчика ускорения, установленного в четвертой степени подвижности манипулятора, а также седьмой блок умножения, второй вход которого подключен к выходу шестого сумматора, а выход - к четвертому входу седьмого сумматора, подключенного выходом ко второму входу первого сумматора, причем второй вход восьмого сумматора соединен с выходом второго сумматора, а выход - с первым входом первого блока умножения, последовательно соединенные синусный функциональный преобразователь, подключенный входом к выходу первого датчика положения, восьмой блок умножения, второй вход которого подключен к выходу второго датчика ускорения, установленного в пятой степени подвижности манипулятора, и девятый сумматор, второй вход которого подключен к выходу шестого блока умножения, а выход - к первому входу седьмого блока умножения, отличающийся тем, что в него дополнительно введены последовательно соединенные третий датчик ускорения, механически связанный с выходным валом редуктора, и девятый блок умножения, второй вход которого подключен к выходу десятого сумматора, первый и второй входы которого подключены к выходам третьего задатчика сигнала и четвертого блока умножения соответственно, последовательно соединенные четвертый датчик ускорения, установленного в третьей степени подвижности манипулятора, десятый блок умножения, одиннадцатый сумматор и одиннадцатый блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к пятому входу седьмого сумматора, последовательно соединенные двенадцатый и тринадцатый блоки умножения, последовательно соединенные двенадцатый сумматор, первый и второй входы которого подключены к выходам датчика массы и первого задатчика сигнала соответственно, и четырнадцатый блок умножения, второй вход которого через третий квадратор подключен к выходу второго датчика скорости и первому входу двенадцатого блока умножения, соединенного вторым входом с выходом девятого сумматора, а выход - ко второму входу одиннадцатого сумматора, последовательно соединенные первый дифференциатор, тринадцатый сумматор, второй вход которого подключен к выходу пятнадцатого блока умножения, шестнадцатый блок умножения, второй вход которого подключен к выходу косинусного функционального преобразователя, четырнадцатый сумматор и семнадцатый блок умножения, второй вход которого подключен к выходу шестого сумматора и второму входу десятого блока умножения, а выход - к шестому входу седьмого сумматора, его седьмой вход - к выходу девятого блока умножения, а восьмой - к выходу тринадцатого блока умножения, второй вход которого подключен к выходу двенадцатого сумматора, последовательно соединенные второй дифференциатор, вход которого подключен к выходу второго датчика ускорения и первому входу пятнадцатого блока умножения, пятнадцатый сумматор, второй вход которого подключен к выходу восемнадцатого блока умножения, первый вход которого соединен со входом первого дифференциатора и выходом первого датчика ускорения, а второй вход - со вторым входом пятнадцатого блока умножения и выходом первого датчика скорости, и девятнадцатый блок умножения, второй вход которого подключен к выходу синусного функционального преобразователя, а выход - ко второму входу четырнадцатого сумматора.
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2008 |
|
RU2380215C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2227316C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2000 |
|
RU2187426C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2164859C2 |

