Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству приема, способу приема и программе. Более конкретно, изобретение относится к устройству приема, способу приема и программе, с помощью которых способ, используя который синхронизируют символы OFDM (МОЧР, мультиплексирование с ортогональным частотным разделением), переключают в соответствии с обстоятельствами.
Уровень техники
Одна из методик модуляции, используемая в настоящее время для наземной цифровой широковещательной передачи, называется МОЧР. В соответствии с технологией МОЧР множество ортогональных поднесущих предусмотрены в пределах полосы пропускания передачи. Данные назначают амплитуде и фазе каждой поднесущей и выполняют их цифровую модуляцию, используя PSK (ФМн, фазовая манипуляция) или QAM (КАМ, квадратурная амплитудная модуляция).
Согласно технологии МОЧР осуществляют разделение всей полосы пропускания на большое количество поднесущих. Это означает, что полоса пропускания ограничена, и скорость передачи понижают для каждой поднесущей, но общая скорость передачи остается той же, что и в традиционных технологиях модуляции.
В соответствии с технологией МОЧР данные назначают множеству поднесущих таким образом, что данные модулируют, выполняя операции IFFT (ОБПФ, обратное быстрое преобразование Фурье). Сигнал МОЧР, получаемый в результате модуляции, демодулируют путем выполнения операции FFT (БПФ, быстрое преобразование Фурье).
Таким образом, устройство для передачи сигнала МОЧР может быть выполнено из схем, относящихся к ОБПФ, и устройство для приема сигнала МОЧР может быть сформировано с помощью схем, относящихся к БПФ.
Учитывая приведенные выше свойства, технологию МОЧР часто применяют в наземных установках цифровой широковещательной передачи, которые сильно подвержены многолучевой интерференции. Стандарты наземной цифровой широковещательной передачи, в которых применяется технология FDM (МЧР, мультиплексирование с частотным разделением), включают в себя DVB-T (ЦТВ-Н, наземное цифровое телевидение), ISDB-T (КСЦВ-Н, комплексная служба наземного цифрового вещания) и КСЦВ-НЗВ (КСЦВ-НЗВ, комплексная служба наземного цифрового звукового вещания).
На фиг.1 показаны символы МОЧР. В соответствии с технологией МОЧР передача сигналов происходит в модулях, называемых символами МОЧР. Как показано на фиг.1, один символ МОЧР состоит из эффективных символов, представляющих интервал сигнала, в течение которого выполняют ОБПФ во время передачи, и защитный интервал (ниже называемый GI (ЗИ)), в который копируют определенную форму колебаний в направлении конца эффективного символа.
ЗИ вставляют хронологически перед эффективным символом. В соответствии с технологией МОЧР вставка ЗИ позволяет предотвратить интерференцию, которая может возникнуть между символами МОЧР в среде с многолучевым распространением.
Множество таких символов МОЧР сводят вместе для формирования одного фрейма передачи МОЧР. В качестве иллюстрации один фрейм передачи МОЧР формируют из 204 символов МОЧР в соответствии со стандартом КСЦВ-Н. Положение, в котором требуется вставлять пилотный сигнал, определяют в модулях фрейма передачи МОЧР.
Технология МОЧР подразумевает использование способов на основе КАМ для модуляции поднесущих. При этом технология МОЧР подвержена влиянию отрицательных эффектов, таких как многолучевая интерференция, во время передачи, в результате чего амплитуда и фаза каждой поднесущей может оказаться отличающейся во время приема от тех, какими они были вначале. Многолучевая интерференция может быть вызвана, в качестве иллюстрации, отражениями от гор и зданий или может быть вызвана SFN (ОЧС, одночастотная сеть).
На стороне приема, таким образом, необходимо выровнять сигналы, чтобы обеспечить, чтобы амплитуда и фаза принятого сигнала были такими же, как при исходной передаче.
В соответствии с технологией МОЧР сторона передачи дискретно вставляет пилотный сигнал в передаваемые сигналы, причем этот пилотный сигнал представляет собой известный сигнал, имеющий заданную амплитуду и заданную фазу. Сторона приема получает частотную характеристику используемого канала передачи на основе амплитуды и фазы пилотного сигнала для выравнивания принятого сигнала. Пилотный сигнал, используемый таким образом для расчета характеристики канала передачи, известен как рассеянный пилотный сигнал (ниже называется сигналом SP (РП)).
На фиг.2 схематично представлена другая типичная структура компоновки РП сигналов в пределах символов МОЧР в соответствии со стандартом КСЦВ-Н. На фиг.2 по горизонтальной оси представлено множество поднесущих, идентифицирующих поднесущие сигнала МОЧР, и по вертикальной оси обозначены номера символов МОЧР, идентифицирующие символы МОЧР сигнала МОЧР. Номера поднесущих соответствуют частотам, и номера символов МОЧР соответствуют времени.
На фиг.2 каждый пустой кружок представляет данные символа, передаваемой каждой поднесущей, и каждый затушеванный кружок обозначает сигнал РП. Как показано на фиг.2, сигнал РП расположен через интервалы четыре символа МОЧР в направлении времени и через интервалы 12 поднесущих в направлении частоты.
В случае стандарта КСЦВ-Н сигнал, называемый (УКПМ/ВК, управление конфигурацией передачи и мультиплексирования/вспомогательный канал), помещают в каждой поднесущей. Сигнал УКПМ/ВК разработан специально для передачи сигнала синхронизации, который обеспечивает для устройства приема получение информации о параметрах передачи, которые действовали во время передачи (то есть такой информации, как используемый способ модуляции и используемый коэффициент кодирования), и номера символа для данного символа в пределах фрейма передачи МОЧР.
В случае стандарта ЦТВ-Н вставляют сигнал, называемый сигналом TPS. Как и при использовании сигнала УКПМ/ВК в соответствии со стандартом КСЦВ-Н, сигнал TPS также формируют с использованием сигнала синхронизации, который предоставляет параметры передачи и обеспечивает возможность синхронизации фрейма. В этой связи читатель может обратиться к выложенному японскому патенту №2005-303440.
Сущность изобретения
На характеристики приема устройства приема в значительной степени влияет точность сигнала синхронизации символа, который используют для определения интервала БПФ, во время которого выполняют БПФ. Сигнал синхронизации символа должен быть отрегулирован таким образом, чтобы свести к минимуму многолучевую интерференцию. Например, регулировку выполняют так, чтобы положение границы между ЗИ и эффективным символом, показанным на фиг.1, было обозначено как исходное положение интервала БПФ.
Таким образом, предпочтительно использовать разные сигналы для получения синхронизации символа в разные моменты времени и оптимально выбирать в соответствии с необходимостью один из других способов обеспечения синхронизации символа.
Настоящее изобретение было выполнено с учетом описанных выше обстоятельств и направлено на устройство приема, способ приема и программу, в соответствии с которыми переключают способ, с помощью которого синхронизируют символы МОЧР, в соответствии с обстоятельствами.
При выполнении настоящего изобретения и в соответствии с одним вариантом его воплощения предусмотрено устройство приема, включающее в себя: средство определения первого положения, предназначенное для расчета значения корреляции между сигналом МОЧР в области времени, составляющим сигнал МОЧР в области времени, представляющим символ МОЧР, с одной стороны, и сигналом, полученным путем задержки сигнала МОЧР в области времени на длину эффективного символа, с другой стороны, для определения начального положения интервала БПФ, который равен длине эффективного символа и который используется как интервал сигнала, представляющий собой цель для БПФ, выполняемого с помощью средства БПФ, со ссылкой на наибольшее из значений корреляции; средство определения второго положения, предназначенное для оценки характеристик канала передачи известного сигнала, включенного в первый сигнал МОЧР в области частот, составляющий сигнал МОЧР в области частот, полученный путем выполнения БПФ для сигнала МОЧР в области времени, перед интерполяцией оценки характеристики канала передачи в направлении времени, для получения данных оценки характеристики канала передачи, перед выполнением ОБПФ для данных оценки характеристики канала передачи, для оценки профиля задержки, перед оценкой величины интерференции между символами в отношении каждого из множества кандидатов интервала БПФ, на основе профиля задержки, перед определением начального положения этого кандидата интервала БПФ с наименьшей величиной интерференции между символами, в качестве начального положения интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ; средство определения третьего положения, предназначенное для установки другого интервала БПФ в положении, установленном со сдвигом относительно интервала БПФ, используемого для генерирования первого сигнала МОЧР в области частот, перед выполнением БПФ для сигнала МОЧР в области времени, в пределах этого другого интервала БПФ, для генерирования второго сигнала МОЧР в области частот, перед удалением искажений из первого и второго сигналов МОЧР в области частот, используя характеристики канала передачи каждой из всех поднесущих, полученных путем интерполяции данных оценки характеристики канала передачи в направлении частоты, для генерирования выровненного сигнала перед определением начального положения интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ, на основе качества генерируемого выровненного сигнала; средство выбора, предназначенное для выбора одного из тех начальных положений интервала БПФ, которые определены средством определения с первого по третье положений; и средство БПФ, предназначенное для выполнения БПФ для сигнала МОЧР в области времени путем использования начального положения, выбранного средством выбора, в качестве начального положения интервала БПФ, для генерирования первого сигнала МОЧР в области частот.
Предпочтительно, устройство приема может дополнительно включать в себя средство оценки, предназначенное для оценки номера символа принятых данных на основе первого сигнала МОЧР в области частот; в котором средство выбора может выбирать то начальное положение интервала БПФ, которое было определено с помощью средства определения первого положения, когда было обозначено начало демодуляции, причем средство выбора дополнительно выбирает то начальное положение интервала БПФ, которое было выбрано средством определения второго положения вместо начального положения, выбранного средством определения первого положения, после окончания оценки номера символа средством оценки.
Предпочтительно, устройство приема может дополнительно включать в себя средство синхронизации фрейма, предназначенное для синхронизации фрейма передачи МОЧР, составленного из множества символов МОЧР, на основе первого сигнала МОЧР в области частот; в котором, когда фрейм передачи МОЧР синхронизируют с помощью средства синхронизации фрейма, средство выбора может выбирать такое начальное положение интервала БПФ, которое определено с помощью средства определения третьего положения вместо начального положения, определенного средством определения второго положения.
Предпочтительно, средство определения первого положения может определять положение со сдвигом от наибольшего из значений корреляции на длину защитного интервала как начальное положение интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ.
Предпочтительно, средство определения второго положения может выполнять оценку величины интерференции между символами в отношении каждого из множества путей, составляющих пути многолучевого распространения, путем умножения той длительности в направлении времени, которая составляет интерференцию с другим символом, когда устанавливают кандидата на интервал БПФ, на мощность пути, в котором проявляется интерференция от этого другого символа, и путем суммирования произведений, получаемых в результате умножения, выполняемого для каждого из этих путей.
Предпочтительно, средство определения третьего положения может определять начальное положение интервала БПФ, используемого для генерирования первого сигнала МОЧР в области частот, как начальное положение интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ, если качество выровненного сигнала, полученного из первого сигнала МОЧР в области частот, будет выше, чем качество выровненного сигнала, полученного из второго сигнала МОЧР области частот, причем средство определения третьего положения дополнительно определяет начальное положение этого другого интервала БПФ, используемого для генерирования второго сигнала МОЧР в области частот, как начальное положение интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ, если качество выровненного сигнала, полученного из второго сигнала МОЧР в области частот, выше, чем качество выровненного сигнала, полученного из первого сигнала МОЧР в области частот.
В соответствии с другим вариантом воплощения настоящего изобретения предусмотрен способ приема, а также программа, обеспечивающая выполнение компьютером обработки, причем каждый из способа и обработки включает в себя следующие этапы: обеспечивают расчет средством определения первого положения значения корреляции между сигналом МОЧР в области времени, составляющим сигнал МОЧР в области времени, представляющий символ МОЧР, с одной стороны, и сигналом, получаемым путем задержки сигнала МОЧР в области времени, на длину эффективного символа, с другой стороны, для определения начального положения интервала БПФ, который равен длине эффективного символа и который используется как интервал сигнала, представляющий собой цель для БПФ, выполняемого с помощью средства БПФ, со ссылкой на наибольшее из значений корреляции; обеспечивает оценку средством определения второго положения характеристик канала передачи известного сигнала, включенного в первый сигнал МОЧР в области частот, составляющий сигнал МОЧР в области частот, получаемый путем выполнения БПФ для сигнала МОЧР в области времени, перед интерполяцией оценки характеристик канала передачи в направлении времени, для получения данных оценки характеристики канала передачи, перед выполнением ОБПФ по данным оценки характеристики канала передачи, для оценки профиля задержки, перед оценкой величины интерференции между символами в отношении каждого из множества кандидатов интервалов БПФ, на основе профиля задержки, перед определением начального положения этого кандидата интервала БПФ, в котором величина интерференции между символами наименьшая, как начального положения интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ; обеспечивают установку средством определения третьего положения другого интервал БПФ в положении со сдвигом относительно интервала БПФ, используемого для генерирования первого сигнала МОЧР в области частот, перед выполнением БПФ для сигнала МОЧР в области времени, в пределах этого другого интервала БПФ, для генерирования второго сигнала МОЧР в области частот, перед удалением искажений из первого и второго сигналов МОЧР в области частот, используя характеристики канала передачи каждой из всех поднесущих, получаемые путем интерполяции данных оценки характеристики канала передачи в направлении частоты, для генерирования выровненного сигнала, перед определением начального положения интервала БПФ, представляющего собой цель для БПФ, выполняемого с помощью средства БПФ, на основе качества генерируемого выровненного сигнала; выбирают одно из тех начальных положений интервала БПФ, которые были определены средствами определения первого-третьего положений; и выполняют БПФ для сигнала МОЧР в области времени, используя выбранное начальное положение, как начальное положение интервала БПФ для генерирования первого сигнала МОЧР в области частот.
В соответствии с вариантом воплощения настоящего изобретения выбирают одно из возможных начальных положений интервала БПФ, которое было определено средствами определения первого-третьего положений. Затем выполняют БПФ для сигнала МОЧР в области времени, используя выбранное начальное положение, как определенное начальное положение интервала БПФ, и соответствующим образом генерируют первый сигнал МОЧР в области частот.
Следует отметить, что устройство приема может представлять собой либо независимое устройство или один из внутренних блоков отдельного устройства.
Таким образом, настоящее изобретение, будучи воплощенным, как отмечено выше, позволяет переключать способ синхронизации символов МОЧР в соответствии с обстоятельствами.
Краткое описание чертежей
Дополнительные преимущества настоящего изобретения будут понятны при чтении следующего описания и приложенных чертежей, на которых:
фиг.1 - схематично показан вид, представляющий символы МОЧР;
фиг.2 - схематично показан вид, представляющий структуру компоновки сигналов РП;
фиг.3 - показана блок-схема, представляющая типичную частичную структуру устройства приема МОЧР;
фиг.4 - показана блок-схема, представляющая другую типичную частичную структуру устройства приема МОЧР;
фиг.5 - показана блок-схема, представляющая дополнительную типичную частичную структуру устройства приема МОЧР;
фиг.6 - показана блок-схема, представляющая типичную общую структуру устройства приема МОЧР;
фиг.7 - показана схема, представляющая данные оценки характеристики в направлении времени;
фиг.8 - показана схема, представляющая данные интерполяции характеристики в направлении частоты;
фиг.9 - показана блок-схема последовательности операций, поясняющая обработку переключения, выполняемую контроллером синхронизации символа;
фиг.10 - показана блок-схема, представляющая типичную структуру блока корреляции защитного интервала;
фиг.11 - схематично показан вид, представляющий типичные сигналы, обрабатываемые блоками, обозначенными на фиг.10;
фиг.12 - показана схема, поясняющая среду многолучевого распространения;
фиг.13 - показана схема, поясняющая, как оценивать величину ISI (ИМС, интерференция между символами);
фиг.14 - показана схема, представляющая типичный фильтр оценки ИМС;
фиг.15 - показана схема, представляющая профиль задержки и фильтр оценки ИМС, наложенные друг на друга;
фиг.16A, 16B и 16C - показаны схемы, представляющие типичные результаты процесса фильтрации;
фиг.17A, 17B и 17C - показаны схемы, поясняющие, как детектировать положения символов;
фиг.18 - показана схема, представляющая взаимосвязь между интервалом БПФ демодуляции и интервалом БПФ управления;
фиг.19 - схематично показан вид, представляющий другую взаимозависимость между интервалом БПФ демодуляции и интервалом БПФ управления;
фиг.20 - показана блок-схема, представляющая типичную структуру блока расчета качества сигнала;
фиг.21 - показана схема, представляющая типичные данные характеристики интерполяции с нулевым значением в области времени; и
фиг.22 - показана блок-схема, представляющая типичную структуру аппаратных средств компьютера.
Подробное описание изобретения
[Общая структура устройства приема МОЧР]
На фиг.3-5 показаны блок-схемы, представляющие типичные структуры устройства 100 приема МОЧР, выполненного на практике, как вариант воплощения настоящего изобретения. На каждой из фиг.3-5 показана частичная структура устройства 100 приема МОЧР. Взаимосвязи между этими структурами показаны в обобщенном виде на фиг.6.
Антенна 101 принимает волну широковещательной передачи сигнала МОЧР, передаваемого устройством передачи станции широковещательной передачи, которая не показана. Принятую волну широковещательной передачи выводят в тюнер 102. Тюнер 102 состоит из арифметического блока 102а и гетеродина 102b.
Арифметический блок 102а умножает RF (РЧ, радиочастотный) сигнал, поступающий из антенны 101, на сигнал из гетеродина 102b, для преобразования частоты сигнала РЧ в сигнал IF (ПЧ, промежуточная частота). Сигнал ПЧ выводят в BPF (ПФ, полосовой фильтр)103.
Гетеродин 102b генерирует синусоидальный сигнал, имеющий заданную частоту, и выводит сгенерированный сигнал в арифметический блок 102а. ПФ 103 фильтрует ПЧ сигнал, поступающий из тюнера 102, и передает этот отфильтрованный сигнал в блок 104 A/D (А/Ц, аналого-цифрового) преобразования.
Блок 104 А/Ц преобразования преобразует ПЧ сигнал, поступающий из ПФ 103, из аналоговой в цифровую форму, используя несущую с заданной частотой, и выводит цифровой ПЧ сигнал в блок 105 ортогональной демодуляции. Блок 105 ортогональной демодуляции выполняет ортогональную демодуляцию сигнала ПЧ, поступающего из блока 104 А/Ц преобразования, и выводит сигнал МОЧР в основной полосе пропускания.
В следующем описании сигнал МОЧР в основной полосе пропускания перед БПФ будет называться сигналом МОЧР в области времени. Сигнал МОЧР в области времени представляет собой комплексный сигнал, который включает в себя компонент реальной оси (компонент I) и компонент мнимой оси (компонент Q), получаемый в результате ортогональной демодуляции. Сигнал МОЧР в области времени, выводимый блоком 105 ортогональной демодуляции, подают в блок 106 коррекции смещения.
Блок 106 коррекции смещения выполняет различную коррекцию для сигнала МОЧР в области времени, поступающего из блока 105 ортогональной демодуляции. В качестве иллюстрации блок 106 коррекции смещения выполняет смещение выборки, полученной с помощью блока 104 А/Ц преобразования (то есть корректирует отклонения моментов выборки), на основе сигнала коррекции смещения выборки, подаваемого из блока 112 выборки/синхронизации несущей.
Кроме того, блок 106 коррекции смещения выполняет смещение для несущей частоты, поступающей из блока 105 ортогональной демодуляции (то есть корректирует отклонения от несущей частоты, используемой устройством передачи), на основе сигнала коррекции сигнала несущей частоты, передаваемого блоком 112 выборки/синхронизации несущей.
Сигнал МОЧР в области времени, обрабатываемый блоком 106 коррекции смещения, подают в блок 107 синхронизации символа, а также в блок 108 БПФ демодуляции, и в блок 115 БПФ управления, как показано на фиг.4.
Блок 107 синхронизации символа синхронизирует символы МОЧР и выводит в блок 108 БПФ демодуляции флаг синхронизации символа, обозначающий начальное положение интервала БПФ. Блок 108 БПФ демодуляции выполняет БПФ, нацеленное на интервал сигнала, имеющий ту же длину, что и эффективная длина символа. Начальное положение интервала сигнала обозначено флагом синхронизации символа.
Блок 107 синхронизации символа выбирает одно из трех положений: положение, определенное на основе сигнала МОЧР в области времени перед БПФ, положение, определенное на основе характеристик канала передачи, оценка которых была получена из сигнала после БПФ, или положение, определенное на основе сигнала выравнивания. Способ определения каждого из этих положений в качестве начального положения интервала БПФ будет подробно описан ниже. В следующем описании начальное положение интервала БПФ может просто называться положением символа, в соответствующих случаях.
Кроме того, блок 107 синхронизации символа выводит флаг DFT (ДПФ, дискретное преобразование Фурье) в блок 115 БПФ управления. Как будет подробно описано ниже, флаг ДПФ представляет собой флаг, который обозначает начальное положение интервала сигнала, на который нацелена обработка, выполняемая блоком 115 БПФ управления. Блок 115 БПФ управления выполняет обработку, эквивалентную БПФ, для интервала, установленного со сдвигом на заданную величину относительно интервала БПФ, на который была нацелена обработка, выполняемая блоком 108 БПФ демодуляции.
Блок 108 БПФ демодуляции устанавливает, как интервал БПФ, интервал, имеющий длину эффективного символа, начинающуюся с положения, обозначенного флагом синхронизации символа, поданного блоком 107 синхронизации символа.
Кроме того, блок 108 БПФ демодуляции выделяет сигнал интервала БПФ из сигнала МОЧР в области времени, поступающего из блока 106 коррекции смещения, и выполняет БПФ для выделенного сигнала интервала БПФ. Операция БПФ, выполняемая блоком 108 БПФ демодуляции, обеспечивает данные, которые были переданы с помощью поднесущих, то есть сигнал МОЧР, представляющий переданный символ в плоскости IQ. Выход блок 108 БПФ демодуляции задан следующим выражением (1):

где "Y" обозначает выход блока 108 БПФ демодуляции, нижний индекс "m" представляет номер символа, нижний индекс "k" представляет номер несущей, "H" представляет частотную характеристику действующего канала передачи, "X" для сигнала передачи, представленного точкой ФМн или сигнала КАМ, и "N" для элемента, который интегрирует компоненты интерференции, происходящие из компонентов шумов и получаемые в результате многолучевого распространения.
Как описано выше, сигнал после обработки БПФ выражают путем добавления шумов и других компонентов к тому, что было получено путем умножения передаваемого сигнала на частотную характеристику канала передачи.
Сигнал МОЧР, получаемый путем выполнения БПФ для сигнала МОЧР в области времени, представляет собой сигнал в области частот. В следующем описании сигнал МОЧР, который прошел обработку БПФ, можно называть сигналом МОЧР в области частот в соответствующих случаях. Сигнал МОЧР в области частот передают в блок 109 выравнивания (фиг.5), в блок 112 выборки/синхронизации несущей, в блок 113 оценки номера символа, в блок 114 синхронизации фрейма и в блок 115 БПФ управления.
Блок 191 выбора в блоке 109 выравнивания выбирает один из двух номеров символа: номер символа, передаваемый блоком 113 оценки номера символа (номер символа МОЧР), или номер символа, заданный блоком 114 синхронизации фрейма. Пропустил Номер символа, выбранный таким образом, выводят в блок 192 выделения пилотного сигнала.
Блок 192 выделения пилотного сигнала выделяет РП сигналы, скомпонованные, как показано на фиг.2. Выделение РП сигналов требует определения, где принимаемые в данный момент данные упорядочены в порядке номеров символов. Блок 191 выбора передает в блок 192 выделения пилотных сигналов информацию для определения этого номера последовательности.
Например, номер символа, передаваемый блоком 113 оценки номера символа, выбирают в диапазоне от времени начала демодуляции до завершения синхронизации фрейма и передают флаг синхронизации фрейма. После окончания синхронизации фрейма выбирают номер символа, передаваемый блоком 114 синхронизации фрейма.
В соответствии с номером символа, передаваемым блоком 191 выбора, блок 192 выделения пилотного сигнала выделяет РП сигнал, прошедший модуляцию ВФМн, из сигнала МОЧР в области частот, передаваемого блоком 108 БПФ демодуляции.
Например, если принимаемые в данный момент данные имеют номер 0 символа, это означает, что сигнал РП передают с помощью поднесущих, имеющих номера 0, 12 и 24 поднесущих; блок 192 выделения пилотного сигнала выделяет соответствующим образом РП сигнал. Блок 192 выделения пилотного сигнала выводит выделенный РП сигнал в блок 193 деления.
Блок 193 деления делит РП сигнал, поступающий из блока 192 выделения пилотного сигнала, на опорный сигнал из блока 194 генерирования опорного сигнала, выполняя, таким образом, оценку характеристики канала передачи РП сигнала.
Значение характеристики канала передачи РП сигнала выражают с помощью выражения (2), приведенного ниже. Сигнал X, используемый для получения значения характеристики канала передачи, генерируют с помощью блока 194 генерирования опорного сигнала.

где символ "~" обозначает, что значение, к которому он присоединен, представляет собой оценочное значение. Нижние индексы "n" и "1" обозначают положение РП сигнала.
Блок 193 деления выводит данные характеристики канала передачи, представляющие оценку характеристики канала передачи, в блок 195 оценки канала передачи в направлении времени. Блок 194 генерирования опорного сигнала генерирует и выводит опорный сигнал, предназначенный для использования блоком 193 деления.
Блок 195 оценки канала передачи в направлении времени выполняет оценку характеристики канала передачи символов МОЧР, выстроенных в направлении времени поднесущих, в которых скомпонованы РП сигналы. Характеристику канала передачи в направлении времени оценивают в качестве иллюстрации, при помощи интерполяции или путем обращения к адаптивному фильтру.
Блок 195 оценки канала передачи в направлении времени выводит данные оценки характеристики в направлении времени, представляющие характеристику канала передачи, через интервалы три поднесущих, в блок 196 регулировки фазы и в блок 200 выбора оптимального коэффициента фильтра.
На фиг.7 схематично показан вид, представляющий данные оценки характеристики в направлении времени. Данные оценки характеристики в направлении времени, такие как показаны на фиг.7, получают с помощью блока 195 оценки канала передачи в направлении времени, используя данные характеристики канала передачи в отношении РП сигнала, скомпонованного, как показано на фиг.2. На фиг.7 каждый из незаполненных и затушеванных кружков представляет поднесущую (передаваемый символ) сигнала МОЧР. Каждый из затушеванных кружков обозначает передаваемый символ, характеристику канала передачи которого оценили в соответствии с обработкой, выполняемой блоком 195 оценки канала передачи в направлении времени.
Характеристику канала передачи оценивают в направлении времени, используя данные характеристики канала передачи в отношении РП сигнала. Это позволяет получить характеристику канала передачи каждого символа МОЧР через интервал три поднесущих.
Блок 196 регулировки фазы регулирует фазу данных оценки характеристики в направлении времени, передаваемых блоком 195 оценки канала передачи в направлении времени, с совмещением с центром фильтра, который передает блок 200 выбора оптимального коэффициента фильтра. Данные оценки характеристики в направлении времени регулируют путем поворота комплексного сигнала (с компонентами I и Q), представляющего значение выборки данных оценки характеристики в направлении времени, в соответствии с номером поднесущей для поднесущей, соответствующей значению выборки, и в соответствии с центром фильтра.
Блок 196 регулировки фазы выводит данные оценки характеристики в направлении времени с отрегулированной фазой в блок 197 фильтра интерполяции частоты и в блок 107 синхронизации символа (фиг.3).
Блок 197 фильтра интерполяции частоты изменяет ширину полосы пропускания фильтра интерполяции на основе коэффициента, переданного из блока 200 выбора оптимального коэффициента фильтра, для выполнения обработки интерполяции частоты, в результате чего характеристику канала передачи интерполируют в направлении частоты. В качестве иллюстрации блок 197 фильтра интерполяции частоты интерполирует два нуля, как вновь полученные значения выборки, между значениями выборки данных оценки характеристики в направлении времени, передаваемыми блоком 195 оценки канала передачи в направлении времени.
Кроме того, блок 197 фильтра интерполяции частоты использует LPF (ФНЧ, фильтр низкой частоты), для фильтрации данных оценки характеристики в направлении времени, подсчет величины выборки которых в три раза больше, чем исходные данные, для интерполяции характеристики канала передачи в направлении частоты. Ширину полосового фильтра ФНЧ (фильтр интерполяции), применяемого для фильтрации, регулируют, используя коэффициент, передаваемый блоком 200 выбора оптимального коэффициента фильтра.
Выполняя фильтрацию с использованием фильтра интерполяции с регулируемой полосой пропускания, блок 197 фильтра интерполяции частоты удаляет повторяющиеся компоненты, относящиеся к нулевой интерполяции, из данных оценки характеристики в направлении времени. Это позволяет получать характеристику канала передачи, интерполированную в направлении частоты.
Блок 197 фильтра интерполяции частоты выводит в блок 199 деления и в блок 117 деления характеристику канала передачи, интерполированную в направлении частоты, то есть данные интерполяции характеристики в направлении частоты, представляющие характеристику канала передачи всех поднесущих.
На фиг.8 схематично показан вид, представляющий данные интерполяции характеристики в направлении частоты. Блок 197 фильтра интерполяции частоты использует данные оценки характеристики в направлении времени, представляющие характеристику канала передачи, через интервалы три поднесущих, для получения характеристики канала передачи каждой из поднесущих, составляющих символ МОЧР, показанный затушеванным на фиг.8.
Блок 198 регулировки фазы регулирует фазу сигнала МОЧР в области частот, передаваемого блоком 108 БПФ демодуляции, в соответствии с центром фильтра, который передает блок 200 выбора оптимального коэффициента фильтра. Сигнал МОЧР в области частот с отрегулированной фазой выводят в блок 199 деления.
Блок 199 деления делит сигнал МОЧР в области частот, поступающий из блока 198 регулировки фазы, на значение оценки канала передачи, для коррекции искажений амплитуды и фазы из сигнала МОЧР в области частот, полученных в канале передачи. Сигнал МОЧР в области частот после коррекции искажений выводят как уравновешенный сигнал.
Искажения, которые были получены сигналом МОЧР, в качестве иллюстрации, как результат многолучевого распространения через канал передачи, действуют как умножение сигнала МОЧР. Таким образом, искажения, полученные сигналом МОЧР в канале передачи, корректируют путем деления фактически принятого сигнала МОЧР на характеристику канала передачи. Выровненный сигнал, выводимый блоком 199 деления, передают в блок 110 коррекции ошибок и в блок 107 синхронизации символа.
Блок 200 выбора оптимального коэффициента фильтра выбирает оптимальный фильтр интерполяции для использования при обработке интерполяции частоты в соответствии с сигналом МОЧР в области частот, передаваемым блоком 108 БПФ демодуляции, и на основе данных оценки характеристики в направлении времени, передаваемых блоком 195 оценки канала передачи в направлении времени.
В качестве иллюстрации блок 200 выбора оптимального коэффициента фильтра пытается выполнить обработку интерполяции частоты во множестве условий с использованием фильтров интерполяции, ширина и положение от центра полосы пропускания каждого из которых изменяются. В результате обработки блок 200 выбора оптимального коэффициента фильтра выбирает фильтр интерполяции, который обеспечивает сигнал с наивысшим качеством.
Кроме того, блок выбора 200 оптимального коэффициента фильтра выводит коэффициент, представляющий ширину полосы пропускания выбранного фильтра интерполяции в блок 197 фильтра интерполяции частоты, и выводит информацию, обозначающую положение центра полосы пропускания выбранного фильтра в блоки 196 и 198 регулировки фазы.
Кроме того, блок 200 выбора оптимального коэффициента фильтра оценивает, что существует разброс задержки, эквивалентный ширине полосы пропускания выбранного фильтра интерполяции, и выводит информацию об этом в блок 107 синхронизации символа. Блок 200 выбора оптимального коэффициента фильтра будет более подробно описан ниже.
Обработка, выполняемая блоком 109 выравнивания, включает в себя оценку значения H в выражении (1), показанном выше, с использованием частично известного значения X, и деления значения Y на оценку значения H для получения оценки неизвестного передаваемого сигнала X. Используя те же символы, как в выражении (1), представленном выше, следующее выражение (3) выражает выровненный сигнал, выводимый блоком 109 выравнивания:

Если значение H оценки точно совпадает с фактической характеристикой H канала передачи, тогда выход блока 109 выравнивания выражают путем суммирования передаваемого сигнала X, который получают путем деления элемента N шума на значение H.
Блок 110 коррекции ошибок выполняет обработку устранения перемежения выровненного сигнала, поступающего из блока 199 деления, блока 109 выравнивания, и также выполняет такую обработку, как устранение выкалывания, декодирование Витерби, устранение расширения сигнала и декодирование RS (PC, Рида-Соломона). Блок 110 коррекции ошибок выводит в выходной буфер 111 декодированные данные, полученные путем выполнения различной обработки.
Тип обработки, выполняемой блоком 110 коррекции ошибок, переключают в соответствии с информацией параметра передачи и флагом начала фрейма, передаваемым блоком 114 синхронизации фрейма, показанным на фиг.4. Блок 110 коррекции ошибок позволяет получать только передаваемые пакеты (то есть фактические пакеты).
Выходной буфер 111 вставляет неэффективные (не переданные) пакеты в заданном порядке между эффективными пакетами, передаваемыми блоком 110 коррекции ошибок, причем эти пакеты передают в расположенные дальше схемы. Положения, в которых были вставлены неэффективные пакеты, определяют с помощью информации параметра передачи, передаваемой блоком 114 синхронизации фрейма.
Блок 112 выборки/синхронизации несущей, показанный на фиг.3, детектирует ошибку выборки и ошибку несущей, выраженную в величине поворота фазы в направлении времени, используя сигналы РП и УКПМ/ВК, включенные в сигнал МОЧР в области частот, передаваемый блоком 108 БПФ демодуляции.
Кроме того, блок 112 выборки/синхронизации несущей фильтрует детектированную ошибку выборки и ошибку несущей для генерирования сигнала коррекции смещения выборки и сигнала коррекции сигнала несущей частоты с целью коррекции. Блок 112 выборки/синхронизации несущей выводит сгенерированные сигналы коррекции в блок 106 выравнивания.
Блок 113 оценки номера символа, показанный на фиг.4, оценивает номер символа в текущих принимаемых данных на основе сигнала МОЧР в области частот, принимаемого блоком 108 БПФ демодуляции.
Как отмечено выше, номер символа, оценка которого была получена блоком 113 оценки номера символа, используют для выделения сигналов РП из периода от момента времени начала демодуляции до окончания синхронизации фрейма (фрейма передачи МОЧР).
Поскольку один фрейм передачи МОЧР состоит из 204 символов МОЧР, требуется время для вывода декодированных данных, если обработка выравнивания не может быть начата до того, как синхронизация фрейма будет закончена. Именно по этой причине оценку номеров символов выполняют с помощью блока 113 оценки номера символов, и обработка выравнивания начинается с использованием полученных оценок номеров символов.
Ниже более подробно поясняется, как получают оценки номеров символов. Блок 113 оценки номера символа вначале принимает данные поднесущей для данного символа и затем принимает данные поднесущей для четырех символов, следующих после них.
Что касается каждых из первоначально принятых данных символа и последующих принятых данных символа, блок 113 оценки номера символа получает первое значение корреляции между данными, переданными поднесущими, имеющим номера 0, 12, 24 и т.д. поднесущих.
Аналогично, что касается каждых из первоначально принятых данных символа и последующих принятых данных символа, блок 113 оценки номера символа получает второе значение корреляции между данными, переданными поднесущими, имеющими номера 3, 15, 27 и т.д. поднесущих.
Кроме того, что касается каждых из первоначально принятых данных символа и последующих принятых данных символа, блок 113 оценки номера символа получает третье значение корреляции между данными, переданными поднесущими, имеющими номера 6, 18, 30 и т.д. поднесущих.
Что касается каждых из первоначально принятых данных символа и последующих принятых данных символа, блок 113 оценки номера символа затем получает четвертое значение корреляции между данными, переданными поднесущими, имеющими номера 9, 21, 33 и т.д. поднесущих.
Блок 113 оценки номера символа сравнивает первое-четвертое значения корреляции. Если в результате сравнения будет определено, что первое значение корреляции является наибольшим, тогда блок 113 оценки номера символа оценивает, что первоначально принятый символ имеет номер 0 символа и что последующий принятый символ имеет номер 4 символа.
Если будет определено, что второе значение корреляции является наибольшим, тогда блок 113 оценки номера символа оценивает, что первоначально принятый символ имеет номер 1 символа и что последующий принятый символ имеет номер 5 символа.
Если будет найдено, что третье значение корреляции является наибольшим, тогда блок 113 оценки номера символа оценивает, что первоначально принятый символ имеет номер 2 символа и что последующий принятый символ имеет номер 6 символа.
Если будет определено, что четвертое значение корреляции является наибольшим, тогда блок 113 оценки номера символа оценивает, что первоначально принятый символ имеет номер 3 символа и что последующий принятый символ имеет номер 7 символа.
Таким образом, как пояснялось выше со ссылкой на фиг.2, номера символов оценивают, используя тот факт, что сигналы РП распределены через интервалы четыре символа МОЧР в направлении времени и через интервалы 12 поднесущих в направлении частоты.
Блок 113 оценки номера символа выводит в блок 109 выравнивания полученную оценку номера символа, имеющую точность модуль четыре (то есть точность, известную по остатку деления на 4). Когда выполняют оценку номера символа, блок 113 оценки номера символа выводит в блок 107 синхронизации символа флаг завершения оценки, обозначающий завершение оценки номера символа.
Блок 114 синхронизации фрейма выделяет сигнал ТММС из сигнала МОЧР в области частот, передаваемого в блок 108 БПФ демодуляции, и детектирует байт синхронизации для генерирования номера символа. Блок 114 синхронизации фрейма выводит сгенерированный номер символа в блок 109 выравнивания.
Кроме того, когда определяют, что сгенерированный номер символа достиг 204 после детектирования байта синхронизации, блок 114 синхронизации фрейма определяет, что синхронизация фрейма закончена. В этот момент блок 114 синхронизации фрейма выводит флаг синхронизации фрейма, обозначающий завершение синхронизации фрейма, в блок 107 синхронизации символа и в блок 109 выравнивания.
Кроме того, блок 114 синхронизации фрейма декодирует и выводит информацию параметра передачи, прикрепленную в единицах фрейма передачи МОЧР, и выводит флаг начала фрейма, обозначающий исходное положение фрейма передачи МОЧР. Информация параметра передачи включает в себя фактическую скорость передачи данных и другую информацию. Информация параметра передачи и флаг начала фрейма, выводимый блоком 114 синхронизации фрейма, подают в блок 110 коррекции ошибок и выходной буфер 111.
Блок 115 БПФ управления выполняет БПФ и выравнивание по интервалу, отличающемуся от интервала, на который нацелено БПФ, с использованием блока 108 БПФ демодуляции. В качестве иллюстрации при выполнении БПФ и выравнивании блок 111 БПФ управления суммирует результат БПФ, передаваемый блоком 108 БПФ демодуляции, с результатом ДПФ. Сумма, получаемая при таком суммировании, выполняемом блоком 115 БПФ управления, составляет сигнал МОЧР в области частот, то есть ее передают в блок 116 регулировки фазы, показанный на фиг.5. Блок 115 БПФ управления также будет более подробно описан ниже.
Блок 116 регулировки фазы регулирует фазу сигнала МОЧР в области частот, поступающего из блока 115 БПФ управления, в соответствии с центром фильтра, передаваемым блоком 200 выбора оптимального коэффициента фильтра. Регулируемый по фазе сигнал МОЧР в области частот выводят в блок 117 деления.
Блок 117 деления делит отрегулированный по фазе сигнал МОЧР в области частот, полученный из блока 116 регулировки фазы, на значение оценки канала передачи, передаваемое блоком 197 фильтра интерполяции частоты, в результате чего корректируют искажения по амплитуде и фазе, которые сигнал МОЧР в области частот получил в канале передачи. Блок 117 деления выводит в блок 107 синхронизации символа выровненный сигнал, составленный из сигнала МОЧР в области частот, после коррекции искажения.
[Структура и работа блока 107 синхронизации символа]
Блок 107 синхронизации символа, показанный на фиг.3, поясняется ниже. Блок 107 синхронизации символа состоит из контроллера 131 синхронизации символа; блоков 132, 133 и 134 определения первого, второго и третьего положений символа; переключателя 135, блока 136 генерирования флага синхронизации символа и блока 137 генерирования флага управления ДПФ. В качестве иллюстрации, когда включают питание устройства 100 приема МОЧР или когда переключают каналы, блок управления более высокого уровня вводит сигнал начала демодуляции, обозначающий начало демодуляции, в контроллер 131 синхронизации символа.
Контроллер 131 синхронизации символа, в свою очередь, выводит сигнал переключения в переключатель 135. Этот сигнал обеспечивает выбор переключателем 135 одного из положений символа, определенных блоками 132, 133 и 134 определения первого, второго и третьего положений символа.
В качестве иллюстрации при вводе сигнала начала демодуляции контроллер 131 синхронизации символа вначале подключает переключатель 135 к выводу "а", для того чтобы выбрать положение символа, определенное блоком 132 определения первого положения символа.
Блок 136 генерирования флага синхронизации символа выводит в блок 108 БПФ демодуляции флаг синхронизации символа, обозначающий положение символа, определенное блоком 132 определения первого положения символа. Блок 108 БПФ демодуляции устанавливает интервал БПФ со ссылкой на определенное положение символа.
Способ, с помощью которого определяют положение символа в блоке 132 определения первого положения символа, основан на сигнале МОЧР в области времени перед обработкой БПФ.
Для того чтобы выполнить БПФ, блоку 108 БПФ демодуляции требуется флаг синхронизации символа, со ссылкой на который должен быть установлен интервал БПФ. Только после того, как флаг синхронизации символа, представляющий положение символа, определенное блоком 132 определения первого положения, будет передан в блок 108 БПФ демодуляции, он получает возможность выполнения БПФ.
Получение возможности выполнения БПФ означает получение возможности оценки номера символа на основе сигнала МОЧР в области частот. Это также означает, что сигналы РП могут быть выделены из сигнала МОЧР в области частот на основе оценки номера символа, в результате чего можно получить оценку характеристики канала передачи.
Как описано выше, когда получают оценку номера символа, блок 113 оценки номера символа передает флаг окончания оценки в контроллер 131 синхронизации символа. После получения данных оценки характеристики в направлении времени, которые представляют характеристику канала передачи через интервалы три поднесущих, блок 195 оценки канала передачи в направлении времени передает полученные данные оценки характеристики в направлении времени в блок 133 определения второго положения символа.
После приема флага окончания оценки, обозначающего, что была получена оценка номера символа из блока 113 оценки номера символа, контроллер 131 синхронизации символа далее подключает переключатель 135 к выводу "b" для выбора положения символа, определенного блоком 133 определения второго положения символа.
Блок 136 генерирования флага синхронизации символа выводит в блок 108 БПФ демодуляции флаг синхронизации символа, обозначающий положение символа, определенное блоком 133 определения второго положения символа, блок 108 БПФ демодуляции устанавливает интервал БПФ со ссылкой на определенное положение символа.
Способ, с помощью которого положение символа определяют с помощью блока 133 определения второго положения символа, основан на данных оценки характеристики в направлении времени, полученных из сигнала МОЧР в области частот, после того как он будет обработан БПФ. Только после того, как данные оценки характеристики в направлении времени будут поданы, положение символа может быть определено таким образом.
Благодаря возможности получения данных оценки характеристики в направлении времени становится возможным интерполировать данные оценки характеристики в направлении времени, в направлении частоты и корректировать искажение, включенное в сигнал МОЧР в области частот, используя характеристику канала передачи для всех поднесущих.
После коррекции искажения, полученного в канале передачи, блок 199 деления и блок 117 деления, показанные на фиг.5, передают выровненный сигнал в блок 134 определения положения третьего символа.
Когда блок 114 синхронизации фрейма получает флаг синхронизации фрейма после окончания синхронизации фрейма, контроллер 131 управления синхронизацией символа далее переключает переключатель 135 на вывод "c" для выбора положения символа, определенного блоком 134 определения положения третьего символа.
Блок 136 генерирования флага синхронизации символа выводит в блок 108 БПФ демодуляции флаг синхронизации символа, обозначающий положение символа, определенное блоком 134 определения положения третьего символа. Блок 108 БПФ демодуляции устанавливает интервал БПФ со ссылкой на определенное положение символа.
Способ, с помощью которого определяют положение символа, с использованием блока 134 определения положения третьего символа, основан на выровненном сигнале, полученном в результате коррекции искажений по каналу передачи. Только после передачи выровненного сигнала, таким образом, может быть определено положение символа.
Контроллер 131 синхронизации символа соединяет переключатель 135 с выводом "с" для выбора положения символа, определенного блоком 134 определения положения третьего символа. Это состояние поддерживают до тех пор, пока не будет введен другой сигнал начала демодуляции.
В приведенном выше описании представлено, как одно из трех положений символа соответствующим образом выбирают и выводят: положение символа, определенное блоком 132, определения первого положения символа, положение символа, определенное блоком 133 определения второго положения символа, и положение символа, определенное блоком 134 определения третьего положения символа.
В следующем описании способ, с помощью которого блок 132 определения положения первого символа определяет положение символа, будет называться первым способом определения, способ, с помощью которого блок 133 определения второго положения символа определяет второе положение символа, будет называться вторым способом определения, и способ, с помощью которого блок 134 определения третьего положения символа определяет третье положение символа, будет называться третьим способом определения.
Второй способ определения включает в себя определение положения, в котором интерференция между символами минимальна, как положение символа, как поясняется ниже. Таким образом, второй способ определения обеспечивает лучшие характеристики приема, чем первый способ определения таким образом, что положение символа определяют на основе сигнала МОЧР в области времени.
Третий способ определения включает в себя определение положения, в котором качество фактически выровненного сигнала оптимизируют как положение символа, как поясняется ниже. Таким образом, третий способ определения обеспечивает лучшие характеристики приема, чем второй способ определения, в результате чего определяют положение символа на основе данных оценки характеристики в направлении времени.
Под управлением контроллера 131 синхронизации символа характеристики приема, в принципе, становятся тем лучше, чем больше времени проходит от начала демодуляции. Первый-третий способы определения будут описаны ниже более подробно.
Блок 136 генерирования флага синхронизации символа выводит в блок 108 БПФ демодуляции флаг синхронизации символа, обозначающий положение символа, передаваемое с помощью переключателя 135.
На основе положения символа, определяемого с помощью блока 134 определения положения третьего символа, блок 137 генерирования флага ДПФ управления генерирует флаг ДПФ, обозначающий начальное положение интервала, представляющего собой цель для обработки блока 115 БПФ управления. Генерируемый таким образом флаг ДПФ выводят в блок 115 БПФ управления.
Ниже, со ссылкой на блок-схему последовательности операций, показанную на фиг.9, описана обработка переключения, выполняемая контроллером 131 синхронизации символа. Эта обработка начинается, когда вводят сигнал начала демодуляции.
На этапе S1 контроллер 131 синхронизации символа подключает переключатель 135 к выводу "а" для выбора положения символа, определенного блоком 132 определения первого положения символа. Флаг синхронизации символа, обозначающий положение символа, определенное блоком 132 определения первого положения символа, выводят в блок 108 БПФ демодуляции. Блок БПФ затем устанавливают со ссылкой на начальное положение, определенное таким образом.
На этапе S2 контроллер 131 синхронизации символа определяет, был ли передан флаг окончания оценки блоком 113 оценки номера символа. Если на этапе S2 будет определено, что флаг окончания оценки не был принят, тогда контроллер 131 синхронизации символа возвращается на этап S1 и постоянно выбирает положение символа, определяемое блоком 132 определения первого положения символа.
Если на этапе S2 будет определено, что флаг окончания оценки был принят, тогда выполняется переход на этап S3. На этапе S3 контроллер 131 синхронизации символа подключают к переключателю 135, к выводу "b", для выбора положения символа, определенного блоком 133 определения второго положения символа. Флаг синхронизации символа, обозначающий положение символа, определенное блоком 133 определения второго положения символа, выводят в блок 108 БПФ демодуляции. Блок БПФ затем устанавливают со ссылкой на начальное положение, определенное таким образом.
На этапе S4 контроллер 131 синхронизации символа определяет, был ли передан флаг синхронизации фрейма блоком 114 синхронизации фрейма. Если на этапе S4 будет определено, что флаг синхронизации фрейма не был принят, тогда контроллер 131 синхронизации символа возвращается на этап S3 и постоянно выбирает положение символа, определяемое блоком 133 определения второго положения символа.
Если на этапе S4 будет определено, что флаг синхронизации фрейма был принят, тогда выполняется переход на этап S5. На этапе S5 контроллер 131 синхронизации символа подключает переключатель 135 к выводу "с", для выбора положения символа, определяемого блоком 134 определения положения третьего символа. Флаг синхронизации символа, обозначающий положение символа, определяемое блоком 134 определения положения третьего символа, выводят в блок 108 БПФ демодуляции. Блок БПФ затем устанавливают со ссылкой на определенное, таким образом, начальное положение.
Описанную выше обработку выполняют каждый раз, когда вводят сигнал начала демодуляции.
Точка времени, в которой требуется выполнять операцию с переключателем 135, для вывода положения символа, определенного блоком 134 определения положения третьего символа, не ограничена периодом до момента подачи флага синхронизации фрейма, после окончания синхронизации фрейма. В качестве альтернативы период времени, прошедший после начала демодуляции, можно отсчитывать с помощью таймера, и операция с переключателем 135 может быть затем выполнена после того, как пройдет относительно длинный период времени (после начала демодуляции), эквивалентный времени, требуемому для окончания синхронизации фрейма.
[Первый способ определения]
Ниже поясняется первый способ определения, с помощью которого блок 132 определения первого положения символа определяет положение символа. Как показано на фиг.3, блок 132 определения первого положения символа состоит из участка 141 корреляции защитного интервала и участка 142 детектирования положения максимального значения.
На фиг.10 показана блок-схема, представляющая типичную структуру участка 141 корреляции защитного интервала. Сигнал МОЧР в области времени, передаваемый блоком 106 коррекции смещения, вводят в участок 141-1 задержки длительности эффективного символа и участок 141-2 умножения. Участок 141-1 задержки длительности эффективного символа выполняет задержку сигнала МОЧР в области времени на длительность эффективного символа и выводит задержанный сигнал МОЧР в области времени в участок 141-2 умножения.
На фиг.11 схематично представлен вид типичных сигналов, обрабатываемых блоками, представленными на фиг.10. В случае, когда сигнал МОЧР в области времени будет подан в участок 141 корреляции защитного интервала, как принятый сигнал (а), показанный в верхней части на фиг.11, участок 141-1 задержки длительности эффективного символа выводит другой принятый сигнал (b), показанный вторым сверху. В горизонтальном направлении на фиг.11 представлено направление времени.
Участок 141-2 умножения умножает сигнал МОЧР в области времени, поступающий из блока 106 коррекции смещения, на сигнал МОЧР в области времени, который был задержан участком 141-1 задержки длительности эффективного символа и который вводят одновременно.
Когда многолучевую интерференцию и шумы не учитывают, сигнал ЗИ (защитного интервала), один из сигналов 1 символа, идентичен сигналу интервала, из которого был скопирован сигнал ЗИ. Сигнал интервала, из которого был скопирован сигнал ЗИ, во входном сигнале МОЧР в области времени имеет такое же распределение интервала времени, как и у сигнала ЗИ в задержанном сигнале МОЧР в области времени. При усреднении результатов умножения этих сигналов интервала получают заданное ненулевое значение.
Выход умножения (с), показанный третьим сверху на фиг.11, представляет выход участка 141-2 умножения. Результаты умножения, выводимые участком 141-2 умножения, передают в участок 141-3 усреднения перемещения защитного интервала.
На участке 141-3 усреднения перемещения защитного интервала получают среднее значение перемещения по той же длине, что и длина ЗИ, выходных сигналов, которые поступают из участка 141-2 умножения, и это участок представлен третьим сверху на фиг.11. Среднее значение перемещения, полученное таким образом, выводят в участок 142 детектирования максимального положения на фиг.3. Выход участка 141-3 усреднения перемещения защитного интервала составляет последовательность, максимальное значение которой возникает на границах символа, как показано в четвертой позиции сверху на фиг.11.
Участок 142 детектирования максимального положения детектирует положения, в которых возникает максимальное значение последовательности, представляющей среднее значение перемещения, передаваемое участком 141-1 задержки длительности эффективного символа. Как показано в нижней части на фиг.11, участок 142 детектирования максимального положения затем определяет положение, следующее после положения максимального значения через длину ЗИ, как положение символа. Участок 142 детектирования максимального положения затем выводит положение символа, определенное таким образом, в переключатель 135.
Как описано выше, блок 132 определения первого положения символа определяет положение символа, получая среднее значение, учитывая тот факт, что данный сигнал ЗИ идентичен сигналу интервала, из которого данный сигнал ЗИ был скопирован.
Ниже поясняются причины, по которым первый способ определения должен быть заменен вторым и третьим способами определения в соответствующие моменты времени.
В соответствии с первым способом определения путь с наибольшей мощностью рассматривается как основной путь, и положение символа в основном пути может быть затем детектировано. Однако в среде с многолучевым распространением радиоволн, в которой сигнал эха предшествует основному входящему пути, положение предшествующего эха требуется детектировать для того, чтобы определить положение символа без ИМС (интерференции между символами).
Среда с многолучевым распространением радиоволн, в которой существует предшествующее эхо, поясняется ниже со ссылкой на фиг.12. В качестве иллюстрации предположим, что существует среда с многолучевым распространением радиоволн, показанная как принимаемый сигнал (а) в верхней части фиг.12. В этом примере время прихода предшествующего эха предшествует времени прихода основного пути приблизительно на тот же период времени, что и ЗИ.
В этой среде принятый сигнал (а) умножают на задержанный принятый сигнал (b), и в последовательности усреднений передвижения, положение, следующее после положения максимального значения интервала GT (ЗВ, защитный временной интервал), рассматривают как положение символа. В этом случае, как показано в нижней части на фиг.12, интервал БПФ включает в себя сигнал символа, следующего после целевого символа, и может хорошо проявлять ИМС.
Как описано выше, в среде с многолучевым распространением радиоволн, в которой существует предшествующее эхо и в которой разброс задержки больше, чем длительность ЗИ, ИМС возникает, если применяют первый способ определения. Затем требуется детектировать положение, в котором ИМС минимальна, но первый способ определения с трудом удовлетворяет этому требованию.
[Второй способ определения]
Приведенное ниже пояснение представляет второй способ определения, с помощью которого блок 133 определения второго положения символа определяет положение символа. Как показано на фиг.3, блок 133 определения второго положения символа состоит из участка 151 ОБПФ, участка 152 оценки ИМС и участка 153 поиска минимального положения.
Участок 151 ОБПФ выполняет оценку профиля задержки, выполняя ОБПФ по данным оценки характеристики в направлении времени, который предают с помощью блока 196 регулировки фазы, показанного на фиг.5, и который представляет характеристику канала передачи через интервалы три поднесущих. Полученную таким образом оценку профиля задержки выводят в участок 152 оценки ИМС.
В этом примере данные оценки характеристики в направлении времени вводят и обрабатывают после регулировки фазы. Однако такая обработка эквивалентна обработке, включающей в себя данные перед регулировкой фазы.
Участок 152 оценки ИМС выполняет оценку величины ИМС путем фильтрации профиля задержки, оцениваемого участком 151 ОБПФ, и выводит величину оценки ИМС в участок 153 поиска минимального положения. Форму используемого фильтра для фильтрации определяют, используя информацию о разбросе задержки, передаваемую блоком 200 выбора оптимального коэффициента фильтра, показанным на фиг.5.
Участок 153 поиска минимального положения детектирует, как положение символа, положение, при котором величина ИМС, получаемая в результате фильтрации, минимальна, и выводит положение символа, детектированное таким образом.
Далее будет описано, как участок 152 оценки ИМС выполняет оценку ИМС. На фиг.13 показана схема, поясняющая, как обычно выполняют оценку величины ИМС.
Здесь предполагается, что существует три пути р1, р2 и р3, как показано на фиг.13. Горизонтальное направление на фиг.13 обозначает направление времени. В верхней части фиг.13 ширина каждой из полос, представляющих пути, представляет мощность данного пути.
В нижней части на фиг.13 показан профиль задержки, оцениваемый участком 151 ОБПФ. Участки рр1-рр3 представлены для обозначения уровней мощности путей р1-р3. Мощность каждого из путей также определяют с помощью профиля задержки.
В случае, когда данный интервал установлен как интервал БПФ, величину ИМС получают путем умножения длины в направлении времени интервала, который занимает ИМС, на мощность пути, в котором возникает ИМС, и путем суммирования результатов умножения по всем путям.
Например, если будет установлен интервал БПФ, такой как показан на фиг.13, тогда ИМС возникает между путем р2 и путем р3. Величину ИМС выражают как dt2×рр2+dt3×рр3, где dt2 обозначает длину в направлении времени интервала пути р2, которую занимает ИМС, и dt3 представляет длину в направлении времени интервала пути р3, где возникает ИМС. Участок 152 оценки ИМС выполняет обработку фильтрации для получения того же результата, что и в приведенных выше расчетах.
На фиг.14 показана схема, представляющая типичный фильтр оценки ИМС, используемый для оценки величины ИМС. На фиг.14, на вертикальной оси представлены коэффициенты фильтра (усиление), и на горизонтальной оси обозначены степени показателя ответвления.
Фильтр FI оценки ИМС на фиг.14 сформован таким образом, что коэффициент усиления равен нулю на интервале показателя ответвления, длина которого соответствует длине ЗИ. Также возможно сделать длину интервала, где коэффициент усиления равен нулю, соответствующей длине разброса задержки, передаваемой блоком 200 выбора оптимального коэффициента фильтра.
Кроме того, фильтр FI оценки ИМС сформован таким образом, что коэффициент усиления увеличивается на интервале, следующем после положения f1 на заднем конце интервала с нулевым усилением и пропорционально расстоянию от этого положения f1, и что коэффициент усиления также увеличивается на интервале перед положением f2 на переднем конце интервала с нулевым коэффициентом усиления и пропорционально расстоянию от этого положения f2. Градиент прямой линии, определяющей коэффициент усиления интервала, следующего после положения f1, может быть произвольным, и поэтому может представлять собой градиент прямой линии, определяющей коэффициент усиления интервала, следующего перед положением f2.
На фиг.15 показана схема, представляющая профиль задержки по фиг.13 и фильтр FI оценки ИМС по фиг.14, наложенные друг на друга. Как показано на фиг.15, когда данный интервал установлен как кандидат на интервал БПФ, фильтр FI оценки ИМС устанавливают таким образом, что начальное положение данного интервала БПФ совпадает с положением f2 переднего конца интервала с нулевым коэффициентом усиления.
В этом случае путь р1 находится в пределах интервала с нулевым коэффициентом усиления, поэтому мощность рр1 пути р1 умножают на ноль. Путь р2 расположен последовательно после положения f1 заднего конца интервала с нулевым коэффициентом усиления, поэтому мощность рр2 пути р2 умножают на заданный коэффициент усиления DT2. Путь р3 также расположен после положения f1, поэтому мощность рр3 пути р3 умножают на коэффициент усиления DT3, который больше, чем коэффициент усиления DT2.
Участок 152 оценки ИМС суммирует результаты умножения для получения оценки величины ИМС. Операции, выполняемые участком 152 оценки ИМС, такие как процесс фильтрации, определены следующим выражением (4):

где NN обозначает размер выборки всех данных, расположенных после ОБПФ (то есть количество точек ОБПФ).
Участок 152 оценки ИМС выполняет обработку фильтрации, описанную выше, множество раз путем сдвига положения кандидата интервала БПФ на заданную ширину (то есть путем сдвига положения фильтра FI оценки ИМС на заданную ширину).
На фиг.16A, 16B и 16C показаны схемы, представляющие типичные результаты обработки фильтрации. Результаты, показанные на фиг.16A-16C, получают, когда обработку фильтрации выполняют путем сдвига положения (времени) кандидата интервала БПФ слева направо, например, с момента времени t1 до момента времени tN.
Когда кандидат интервала БПФ устанавливают таким образом, чтобы сделать время t1 его начальным положением, путь p1 определяют в интервале с нулевым коэффициентом усиления, как показано в верхней части фиг.16А. Мощность рр1 пути р1 затем умножают на ноль.
Путь р2 располагают последовательно после положения f1 заднего конца интервала с нулевым коэффициентом усиления, таким образом, что мощность рр2 пути р2 умножают на коэффициент усиления DT2a. Путь р3 также расположен после положения f1, поэтому мощность рр3 пути р3 умножают на коэффициент DT3a усиления, который больше, чем коэффициент DT2a усиления.
График в нижней части на фиг.16А представляет оценку величины ИМС как сумму результатов описанных выше умножений. На фиг.16А, на горизонтальной оси обозначено начальное положение кандидата интервала БПФ, и на вертикальной оси представлены оценки величины ИМС. В примере, показанном на фиг.16А, оценку величины ИМС получают как значение D1.
Аналогично, когда кандидат интервала БПФ устанавливают таким образом, чтобы сделать момент времени tk его начальным положением, пути р1 и р2 определяют в интервале с нулевым коэффициентом усиления, как представлено в верхней части на фиг.16 В. Мощность рр1 пути р1 и мощность рр2 пути р2 затем умножают на ноль.
Путь p3 расположен после положения f1 заднего конца интервала с нулевым коэффициентом усиления, поэтому мощность рр3 пути р3 умножают на коэффициент DT3b усиления. В примере, показанном на фиг.16B, оценку величины ИМС получают как значение Dk, как показано в виде графика в нижней части на чертеже.
Когда кандидат на интервал БПФ устанавливают таким образом, чтобы сделать момент времени tN его начальным положением, путь р1 располагается раньше, чем положение t2 переднего конца интервала с нулевым коэффициентом усиления, как показано в верхней части фиг.16C. Мощность рр1 пути р1 затем умножают на коэффициент DT1c усиления.
Кроме того, путь р2 располагается раньше, чем положение f2 переднего конца интервала с нулевым коэффициентом усиления. Мощность рр2 пути р2 затем умножают на коэффициент DT2c усиления, который меньше, чем коэффициент DT1c усиления.
Путь р3 располагают в интервале с нулевым коэффициентом усиления, поэтому мощность рр3 пути р3 умножают на ноль. В примере, показанном на фиг.16C, оценку величины ИМС получают как значение DN, как показано на графике в нижней части на чертеже.
Участок 152 оценки ИМС передает в участок 153 поиска минимального положения информацию, обозначающую взаимозависимость между оценками величин ИМС, с одной стороны, и начальными положениями - кандидатами интервала БПФ, с другой стороны, причем эти величины и положения получают в результате обработки фильтрации, при которой все заданные положения используют как начальные положения кандидатов интервала БПФ.
Далее поясняется, как детектируют положение символа с помощью участка 153 поиска минимального положения. На фиг.17A, 17B и 17C схематично показаны виды, поясняющие, как детектируют положения символов. На фиг.17A показан профиль задержки, и на фиг.17B графически обозначены взаимозависимости между оценками величин ИМС и начальными положениями кандидатов интервала БПФ.
Когда взаимозависимость между оценками величин ИМС и начальными положениями кандидатов интервала БПФ получают, как показано на фиг.17B, участок 153 поиска минимального положения детектирует положение, обозначенное затушеванным треугольником, направленным вверх, как положение, в котором оценка величины ИМС минимальна. Положение, где оценка величины ИМС минимальна, определено как начальное положение интервала БПФ, то есть как положение символа.
На фиг.17C показан случай, в котором интервал БПФ установлен с положением символа по фиг.17B, который рассматривается, как начальное положение интервала. Как показано на фиг.17C, ИМС возникает только на пути р3. Поскольку мощность пути р3 ниже, чем в любых других путях, величина ИМС становится меньше, чем, если бы интервал БПФ был расположен, как показано на фиг.13.
В соответствии со вторым способом определения, как описано выше, положение, в котором величина ИМС минимальна, определяют, как положение символа.
Ниже описаны причины, почему третий способ определения используют вместо второго способа определения. В качестве иллюстрации можно привести случаи, в которых присутствует большое количество путей, в которых мощность слишком мала для детектирования с использованием ОБПФ. В таких случаях положение символа, определяемое с помощью второго способа определения, фактически может не быть оптимальным положением. ИМС, возникающая совместно с путями, мощность которых слишком мала для детектирования с использованием ОБПФ, не учитывают во втором способе определения.
В этом случае используют третий способ определения. Третий способ определения представляет собой способ, с помощью которого определяют оптимальное положение, как положение символа, даже если существуют множество путей, в которых мощность слишком мала для детектирования с использованием ОБПФ.
[Третий способ определения]
Ниже поясняется третий способ определения, с помощью которого блок 134 определения положения третьего символа определяет положение символа. На основе положения символа, определяемого блоком 134 определения положения третьего символа, устанавливают интервал, на который нацеливают обработку блока 115 БПФ управления, и выровненный сигнал получают соответствующим образом. Выровненный сигнал подают обратно в блок 134 определения положения третьего символа, который затем определяет положение символа.
Перед началом описания блока 134 определения положения третьего символа будет приведено пояснение блока 115 БПФ управления. Блок 115 БПФ управления обрабатывает целевой интервал, установленный со сдвигом на S выборок (время) относительно интервала, на который нацелено БПФ, выполняемое блоком 108 БПФ демодуляции. Флаг ДПФ, выводимый блоком 137 генерирования флага ДПФ, представляет начальное положение целевого интервала.
В результате выполнения ДПФ блок 115 БПФ управления получает информацию, обозначающую разность между результатом БПФ, выполняемым блоком 108 БПФ демодуляции. В результате суммирования информации разности с выходом блока 108 БПФ демодуляции обеспечивают возможность генерирования сигнала МОЧР в области частот, который будет получен, если БПФ будет выполнено в интервале, установленном со сдвигом на S выборок.
Таким образом, когда целевой участок установлен со сдвигом на S выборок, блок 115 БПФ управления выполняет обработку, эквивалентную обработке, которую выполняют с помощью блока 108 БПФ демодуляции.
Интервал, на который нацелена обработка, выполняемая блоком 108 БПФ демодуляции, можно назвать интервалом БПФ демодуляции, и интервал, на который нацелена обработка блока 115 БПФ управления, можно назвать интервалом БПФ управления, в соответствующих случаях в следующем описании. Когда операция, выполняемая блоком 115 БПФ управления, представляет собой ДПФ, выход блока 115 БПФ управления эквивалентен выходу блока 108 БПФ демодуляции, поэтому интервал, на который нацелена обработка, выполняемая блоком 115 БПФ управления, называется интервалом БПФ управления.
То, что обработка, выполняемая блоком 115 БПФ управления, эквивалентна обработке, выполняемой блоком 108 БПФ демодуляции, поясняется ниже, с использованием математических выражений.
Предполагается, что время начала интервала БПФ демодуляции равно нулю и что длина как интервала БПФ демодуляции, так и интервала БПФ управления представляет собой длину N эффективного символа. Следующее выражение (5) определяет сигнал Y0 (ω) на частоте ω, получаемой при выполнении БПФ по сигналу МОЧР в области времени, по длине N, выделенной из интервала БПФ демодуляции:

где r(k) обозначает сигнал МОЧР в области времени в момент времени "k", и "j" представляет воображаемую единицу количественного измерения.
Как показано на фиг.18, предположим, что время начала интервала БПФ демодуляции находится после времени начала интервала БПФ управления на время "s". В этом случае сигнал МОЧР в области времени, в пределах интервала БПФ управления будет задан как r(s), r(s+1), …, r(N-1+s). Следующее выражение (6) определяет сигнал YS (ω), получаемый при выполнении БПФ в интервале БПФ управлении:
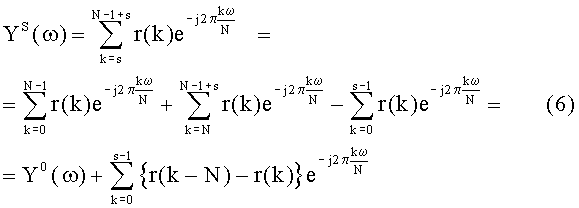
Как показано на фиг.19, предположим, что время начала интервала БПФ демодуляции находится перед временем начала интервала БПФ управления на время "s". В этом случае сигнал МОЧР в области времени, в пределах интервала БПФ управления, будет задан как r(-s), r(-s+1), …, r(-), r(0), r(1) …, r(N-1-s). Следующее выражение (7) определяет сигнал Y-S (ω), получаемый при выполнении БПФ в интервале БПФ управления:

Первый член в выражениях (6) и (7), показанных выше, представляет результат БПФ, нацеленного на интервал БПФ демодуляции. Выход блока 108 БПФ демодуляции можно использовать без модификации, как значение первого члена в выражениях (6) и (7).
Второй член в выражениях (6) и (7), представленных выше, обозначает результат ДПФ, нацеленного на сигнал МОЧР за время "s". Блок 115 БПФ управления выполняет операции для получения значения второго члена в выражениях (6) или (7), показанных выше, и суммирует результаты операций с выходом блока 108 БПФ демодуляции.
Как показано на фиг.4, блок 115 БПФ управления состоит из контроллера 171 БПФ управления, арифметического блока 172, блока 173 выбора, запоминающего устройства 174, арифметического блока 175 ДПФ, запоминающего устройства 176 и блока 177 суммирования.
Флаг ДПФ, выводимый блоком 137 генерирования флага ДПФ управления, вводят в контроллер 171 БПФ управления. Сигнал МОЧР в области времени, выводимый блоком 106 коррекции смещения, вводят как в арифметический блок 172, так и в блок 173 выбора. Сигнал МОЧР в области частот, выводимый блоком 108 БПФ демодуляции, вводят в блок 177 суммирования.
Контроллер 171 БПФ управления управляет всем блоком 115 БПФ управления во время выполнения его операции, таким образом, как установлено интервалом БПФ управления на основе флага ДПФ, и для генерирования результата БПФ, выполняемого по интервалу, установленному со сдвигом на S выборок относительно интервала БПФ демодуляции.
Используя величину сдвига, заданную блоком 107 синхронизации символа, контроллер 171 БПФ управления избирательно определяет, расположено ли время начала интервала БПФ управления после времени начала интервала БПФ демодуляции (то есть должна быть выполнена операция в соответствии с выражением (6)), или раньше, чем время начала (то есть должна быть выполнена операция в соответствии с выражением (7)).
Арифметический блок 172 вычитает сигнал, содержащийся в запоминающем устройстве 174, из сигнала МОЧР в области времени, подаваемого блоком 106 коррекции смещения. Полученный, таким образом сигнал выводят в блок 173 выбора.
Под управлением контроллера 171 БПФ управления блок 173 выбора выбирает либо сигнал МОЧР в области времени, передаваемый блоком 106 коррекции смещения, или сигнал, заданный арифметическим блоком 172. Выбранный сигнал сохраняют в запоминающем устройстве 174.
В качестве иллюстрации, если время начала интервала БПФ управления следует позже, чем время начала интервала БПФ демодуляции, как показано на фиг.18, блок 173 выбора выбирает сигнал МОЧР в области времени, поступающий из блока 106 коррекции смещения, когда ввод сигнала происходит во время интервала A. Когда ввод сигнала происходит во время интервала В, который следует после интервала A на длину N эффективного символа, блок 173 выбора выбирает сигнал из арифметического блока 172, как результат вычитания.
Аналогично, если время начала интервала БПФ управления следует раньше, чем время начала интервала БПФ демодуляции, как показано на фиг.19, блок 173 выбора выбирает сигнал МОЧР в области времени, поступающий из блока 106 коррекции смещения, когда ввод сигнала происходит во время интервала A. Когда ввод сигнала происходит во время интервала В, который следует после интервала А через длину N эффективного символа, блок 173 выбора выбирает сигнал из арифметического блока 172, как результат вычитания.
Под управлением контроллера 171 БПФ управления запоминающее устройство 174 сохраняет сигнал, передаваемый блоком 173 выбора. Когда весь сигнал на интервале B, показанном на фиг.18 и 19, будет сохранен в запоминающем устройстве 174, сохраненный сигнал выбирают с помощью арифметического блока 175 ДПФ.
Если время начала интервала БПФ управления следует позже, чем время начала интервала БПФ демодуляции, арифметический блок 175 ДПФ выполняет операции по второму члену в выражении (6) на основе сигнала, выбираемого из запоминающего устройства 174. Результат операции выводят в запоминающее устройство 176. Контроллер 171 БПФ управления передает информацию, представляющую 2πk ω/N в выражении (6), в арифметический блок 175 ДПФ.
Если время начала интервала БПФ управления следует раньше, чем время начала интервала БПФ демодуляции, арифметический блок 175 ДПФ выполняет операции в соответствии со вторым членом в выражении (7) на основе сигнала, выбранного из запоминающего устройства 174. Результат этой операции выводят в запоминающее устройство 176. Контроллер 171 БПФ управления передает информацию, представляющую 2πk ω/N в выражении (7), в арифметический блок 175 ДПФ.
Под управлением контроллера 171 БПФ управления в запоминающем устройстве 176 сохраняют результат операции, поступающий из арифметического блока 17 5ДПФ. Когда арифметический блок 175 ДПФ выполняет операции по второму члену в выражениях (6) или (7), значение, сохраняемое в запоминающем устройстве 176, получают с помощью блока 177 суммирования.
Блок 177 суммирования суммирует значение, получаемое из запоминающего устройства 176, с сигналом МОЧР в области частот, выводимым блоком 108 БПФ демодуляции. Сумму, получаемую в результате суммирования, затем выводят с помощью блока 177 суммирования.
Вывод блока 177 суммирования представляет сигнал МОЧР в области частот, получаемый путем выполнения БПФ по интервалу, установленному со сдвигом на YS в выражении (6) или Y-S (ω) в выражении (7), то есть на величину "s" относительно интервала БПФ демодуляции.
Сигнал МОЧР в области частот, выводимый блоком 177 суммирования, регулируют по фазе с помощью блока 116 регулирования фазы, показанного на фиг.5, перед подачей в блок 117 деления. Блок 117 деления корректирует искажение канала передачи сигнала с использованием той же характеристики канала передачи, которую использует блок 199 деления, и выводит выровненный сигнал. Выровненный сигнал, выводимый блоком 117 деления, подают в блок 134 определения положения третьего символа, показанный на фиг.3, вместе с выровненным сигналом, выводимым блоком 199 деления.
Выровненный сигнал, генерируемый блоком 199 деления, будет называться выровненным сигналом демодуляции, и выровненный сигнал, генерируемый блоком 117 деления, будет называться выровненным сигналом управления, в соответствующих случаях в следующем описании.
Блок 134 определения положения третьего символа будет описан ниже. Как показано на фиг.3, блок 134 определения положения третьего символа состоит из участка 161 расчета качества сигнала и контроллера 162 поиска. Выровненный сигнал демодуляции, поступающий из блока 199 деления, и выровненный сигнал управления из блока 117 деления вводят в участок 161 расчета качества сигнала. Каждый из выровненного сигнала демодуляции и выровненного сигнала управления представляет собой выровненный сигнал, относящийся к тому же символу.
Участок 161 расчета качества сигнала рассчитывает качество выровненного сигнала демодуляции, а также качество выровненного сигнала управления и выводит информацию, обозначающую рассчитанные значения качества, в контроллер 162 поиска.
На фиг.20 показана блок-схема, представляющая типичную структуру участка 161 расчета качества сигнала. Выровненный сигнал демодуляции или выровненный сигнал управления разделяют на компонент I и компонент Q перед вводом. Сигнал компонента I вводят в часть 401 жесткого решения и в часть 403 вычитания; сигнал компонента Q вводят в часть 402 жесткого решения и в часть 404 вычитания.
Часть 401 жесткого решения принимает жесткое решение по входному сигналу компонента I в соответствии с действующим способом модуляции. Результат жесткого решения выводят в часть 403 вычитания.
Часть 402 жесткого решения принимает жесткое решение для входного сигнала компонента Q в соответствии с действующим способом модуляции. Результат жесткого решения выводят в часть 404 вычитания.
Часть 403 вычитания получает значение разности между выходом части 401 жесткого решения и блоком входного компонента I. Полученную таким образом разность выводят в часть 405 квадрата.
Часть 404 вычитания получает разность между выходом части 402 жесткого решения и блоком входного компонента Q. Полученную таким образом разность выводят в часть 406 квадрата.
Часть 405 квадрата получает квадрат разности, подаваемой частью 403 вычитания. Результат расчета выводят в часть 407 суммирования.
Часть 406 квадрата получает квадрат разности, подаваемой частью 404 вычитания. Результат расчета выводят в часть 407 суммирования.
Часть 407 суммирования суммирует выходы части 405 квадрата и части 406 квадрата. Сумму, полученную в результате суммирования, выводят в часть 408 суммирования.
Часть 408 суммирования суммирует выход части 407 суммирования и значение, содержащееся в регистре 409. Блок 480 суммирования выполняет операцию суммирования такое количество раз, как и заданное количество данных, и выводит накопленный результат в регистр 409. Накопленный результат операций, относящихся к заданному количеству данных, помещают в регистр 409 и передают из него в контроллер 162 поиска, показанный на фиг.3, как информацию, представляющую качество выровненного сигнала.
Контроллер 162 поиска сравнивает качество выровненного сигнала демодуляции, выводимого участком 161 расчета качества сигнала, с качеством выровненного сигнала управления. Если будет определено, что качество выровненного сигнала управления выше, чем качество выровненного сигнала демодуляции, контроллер 162 поиска выводит положение символа, обозначающее начальное положение текущего интервала БПФ управления, таким образом, что тот же интервал, что и текущий интервал БПФ управления, будет установлен как следующий интервал БПФ демодуляции.
Таким образом, если сигнал с более высоким качеством будет получен при нацеливании на интервал БПФ управления, вместо интервала БПФ демодуляции, тогда блок 108 БПФ демодуляции выполняет БПФ по этому интервалу для получения сигнала с боле высоким качеством в следующий интервал времени.
Кроме того, контроллер 162 поиска устанавливает положение, полученное путем сдвига начального положения текущего интервала БПФ управления на заданную ширину, как начальное положение следующего интервала БПФ управления, и выводит информацию, обозначающую установленное положение в блок 137 генерирования флага управления ДПФ. В качестве иллюстрации положение, установленное со сдвигом в направлении, противоположном предыдущему направлению сдвига, может быть установлено как начальное положение следующего интервала БПФ управления.
С другой стороны, если определяют, что качество выровненного сигнала демодуляции выше, чем качество выровненного сигнала управления, тогда контроллер 162 поиска выводит положение символа, обозначающее начальное положение текущего интервала БПФ демодуляции, таким образом, что тот же интервал, что и текущий интервал БПФ демодуляции, будет установлен как следующий интервал БПФ демодуляции. Таким образом, если сигнал высокого качества может быть получен, когда сохраняется нацеливание на интервал БПФ демодуляции, тогда это состояние сохраняют.
Контроллер 162 поиска затем устанавливает положение, полученное путем сдвига начального положения текущего интервала БПФ управления на заданную ширину, как начальное положение следующего интервала БПФ управления, и выводит информацию, обозначающую установленное положение, в блок 137 генерирования флага ДПФ управления. В качестве иллюстрации положение, установленное со сдвигом в том же направлении, что и предыдущее направление сдвига, может быть установлено как начальное положение следующего интервала БПФ управления.
Когда положение символа определяют, как описано выше, на основе качества действительно выровненного сигнала, становится возможным обеспечить более высокие характеристики приема, чем если бы использовали положение символа, определенное в соответствии с первым или вторым способом определения.
[Выбор оптимального коэффициента фильтра]
Блок 200 выбора оптимального коэффициента фильтра будет описан ниже. Однако перед этим описанием ниже приведено пояснение фильтра интерполяции, предназначенного для использования в блоке 197 фильтра интерполяции частоты.
Если обозначить как Tu длину эффективного символа, то есть длину интервала одиночного символа минус ЗИ, тогда фильтр интерполяции в качестве иллюстрации может быть выполнен с шириной полосы пропускания приблизительно Tu/3 (секунды) или меньше. Такой фильтр интерполяции используют для подавления повторяющихся компонентов, включенных в данные оценки характеристики в направлении времени, генерируемые блоком 195 оценки канала передачи в направлении времени, в результате чего выделяют соответствующий путь, представляющий характеристику канала передачи.
Ниже представлены причины, по которым данные оценки характеристики в направлении времени содержат повторяющиеся компоненты. Данные оценки характеристики в направлении времени получают из сигнала МОЧР в области частот и, таким образом, составляют данные в области частот.
Как описано выше, блок 197 фильтра интерполяции частоты генерирует данные оценки характеристики в направлении времени, по которым количество данных утраивают, в качестве иллюстрации, путем интерполяции двух нулей. Данные оценки характеристики в направлении времени в области времени и данные характеристики интерполяции с нулевым значением в области времени имеют одни и те же компоненты частот.
Кроме того, данные оценки характеристики в направлении времени составляют последовательность выбранных значений, обозначающих характеристику канала передачи, через интервалы три поднесущих. Если длина эффективного символа представлена как Tu (секунд) и интервал от поднесущей к поднесущей как Fc (Гц), тогда справедливо выражение Fc=1/Tu (Гц). Выражение 3Fc=3/Tu (Гц) определяет интервал между значениями выборок в данных оценки характеристики в направлении времени, составляющих последовательность значений выборок, обозначающих характеристику канала передачи через интервалы три поднесущих.
Таким образом, выражение Fc=1/Tu (Гц) определяет интервал между значениями выборки данных характеристики интерполяции нулевого значения, полученных путем интерполяции двух нулей между значениями выборки данных оценки характеристики в направлении времени.
В то же время данные оценки характеристики в направлении времени, для которых интервал между значениями выборок определен как 3Fc=3/Tu (Гц), представляют собой данные, цикл которых определен как 1/3Fc=Tu/3 (секунд) в области времени. Данные характеристики интерполяции с нулевым значением, интервал которых между значениями выборки определен, как Fc=1/Tu (Гц), представляет собой данные с их циклом, определенным как 1/Fc=Tu (секунд) в области времени, то есть в три раза больше цикла данных оценки характеристики в направлении времени.
Как описано выше, в случае, когда данные характеристики интерполяции нулевого значения в области времени имеют те же компоненты частот, как и данные оценки характеристики в направлении времени, в области времени, и их цикл определен, как в три раза больший, чем цикл данных оценки характеристики в направлении времени, данные характеристики интерполяции нулевого значения в области времени преобразуются в данные, которые формируют путем троекратного повторения данных оценки характеристики в области времени в направлении времени.
На фиг.21 показан схематичный вид, представляющий типичные данные характеристики интерполяции нулевого значения в области времени. Это представляет пример с двумя путями: основным путем и предшествующим эхо. На фиг.21 по горизонтальной оси обозначено время, и по вертикальной оси обозначены уровни мощности пути.
Данные характеристики интерполяции нулевого значения, цикл которых обозначен как Tu (секунд), рассматривают как данные, формируемые путем троекратного повторения многолучевого распространения, соответствующего данным оценки характеристики в направлении времени, цикл которых определен как Tu/3 (секунд) в области времени.
На фиг.21, если сигналы многолучевого распространения, показанные затушеванными в центре, выделить как данные интерполяции характеристики в направлении частоты, тогда другие данные многолучевого распространения требуется удалить, для того чтобы получить соответствующие сигналы многолучевого распространения, которые соответствуют данным интерполяции характеристики в направлении частоты.
Таким образом, блок 197 фильтра интерполяции частоты фильтрует данные характеристики интерполяции нулевого значения, для устранения сигналов многолучевого распространения, за исключением соответствующих сигналов многолучевого распространения. Выделенные, таким образом, сигналы многолучевого распространения соответствуют данным интерполяции характеристики в направлении частоты.
Данные характеристики интерполяции с нулевым значением составляют данные в области частоты. Фильтрация данных характеристики интерполяции нулевого значения с помощью блока 197 фильтра интерполяции частоты включает в себя свертку коэффициента фильтра для фильтра интерполяции с данными характеристики интерполяции нулевого значения, которые представляют собой данные в области частоты.
Свертка в области частоты включает в себя умножение на функцию окна в области времени. Таким образом, фильтрация данных характеристики интерполяции нулевого значения может быть выражена, как умножение в области времени данных характеристики интерполяции нулевого значения на функцию окна, соответствующую полосе пропускания блока 197 фильтра интерполяции частоты. Функция окна, обозначенная толстыми линиями на фиг.21, представляет собой функцию, которую используют при умножении, выполняемом как фильтрация данных характеристики интерполяции нулевого значения и которая соответствует полосе пропускания блока 197 фильтра интерполяции частоты.
Цикл сигналов многолучевого распространения, повторяющийся три раза, обозначен как Tu/3 (секунды). Таким образом, если фильтр интерполяции будет предусмотрен в форме ФНЧ и его полоса пропускания будет иметь такую же ширину, как и в цикле Tu/3 (секунд) сигналов многолучевого распространения, повторяемых три раза, то есть от -Tu/6 до +Tu/6, тогда могут быть выделены соответствующие сигналы многолучевого распространения, которые соответствуют данным интерполяции характеристики в направлении частоты.
Как описано выше, блок 197 фильтра интерполяции частоты использует фильтр интерполяции для выделения соответствующих сигналов многолучевого распространения. Ширину и положение центра полосы пропускания фильтра интерполяции регулируют таким образом, чтобы включить в них все соответствующие сигналы многолучевого распространения и чтобы компоненты, такие как белые шумы, помимо действующих путей, минимизировать в пределах полосы пропускания.
Блок 200 выбора оптимального коэффициента фильтра будет описан ниже. Как показано на фиг.5, блок 200 выбора оптимального коэффициента фильтра состоит из контроллера 211 центра фильтра/полосы, запоминающих устройств 212 и 213, участка 214 коррекции искажения канала передачи, участка 215 интерполяции частоты, участка 216 расчета качества сигнала и участка 217 выбора оптимального значения. Сигнал МОЧР в области частот, выводимый блоком 108 БПФ демодуляции, вводят в запоминающее устройство 212. Данные оценки характеристики в направлении времени, выводимые блоком 195 оценки канала передачи в направлении времени, вводят в запоминающее устройство 213.
Контроллер 211 центра фильтра/полосы управляет операциями записи и считывания в запоминающие устройства 212 и 213 и из них таким образом, что сохраняют и получают данные одного и того же символа.
Контроллер 211 центра фильтра/полосы выводит коэффициент, представляющий ширину полосы пропускания фильтра пробной интерполяции (то есть пробной полосы) в участок 215 интерполяции частоты и участок 217 выбора оптимального значения.
Кроме того, контроллер 211 центра фильтра/полосы выводит коэффициент, представляющий положение центра полосы пропускания фильтра пробной интерполяции (то есть пробного центра), в участок 214 коррекции искажений канала передачи, участок 215 интерполяции частоты и участок 217 выбора оптимального значения.
В запоминающем устройстве 212 содержится один символ, соответствующий сигналу МОЧР в области частот, передаваемый блоком 108 БПФ демодуляции, под управлением контроллера 211 центра фильтра/полосы. Сигнал МОЧР в области частот, содержащийся в запоминающем устройстве 212, соответствующий одному символу, получают с помощью участка 214 коррекции искажений канала передачи.
Под управлением контроллера 211 центра фильтра/полосы в запоминающем устройстве 213 содержат один символ, соответствующий данным оценки характеристики в направлении времени, которые оценивают с помощью блока 195 оценки канала передачи в направлении времени, как данные, представляющие характеристику передачи через интервалы три поднесущих. Данные оценки характеристики в направлении времени, содержащиеся в запоминающем устройстве 213, соответствующие одному символу, извлекают с помощью участка 215 интерполяции частоты.
Участок 214 коррекции искажений канала передачи состоит из части 231 регулировки фазы и части 232 деления. Часть 231 регулировки фазы регулирует один символ, соответствующий сигналу МОЧР в области частот, полученный из запоминающего устройства 212 в соответствии с пробным центром, передаваемым контроллером 211 центра фильтра/полосы, и выводит регулируемый сигнал МОЧР в области частот в часть 232 деления.
В случае, когда сигнал МОЧР в области частот подвергают регулировке фазы в соответствии с пробным центром, что происходит здесь, таким образом, выполняют обработку, эквивалентную регулировке положения центра полосы пропускания фильтра интерполяции.
Каждый раз, когда характеристику канала передачи передают с помощью участка 215 интерполяции частоты, часть 232 деления корректирует искажение канала передачи, содержащееся в сигнале МОЧР в области частот, соответствующем одному символу. Участок 214 коррекции искажения канала передачи выводит в участок 216 расчета качества сигнала сигнал МОЧР в области частот, свободный от искажений.
Участок 215 интерполяции частоты состоит из части 241 регулировки фазы и части 242 интерполяции частоты. Часть 241 регулировки фазы регулирует фазу данных оценки характеристики в направлении времени, полученных из запоминающего устройства в соответствии с пробным центром, передаваемым контроллером 211 центра фильтра/полосы. Данные оценки характеристики в направлении времени после регулировки фазы выводят в часть 242 интерполяции частоты.
Часть 242 интерполяции частоты выполняет выборку с повышением частоты выборки значения выборки данных оценки характеристики в направлении времени с коэффициентом три. Часть 242 интерполяции частоты переходит к выполнению обработки интерполяции частоты, используя фильтр интерполяции с шириной его полосы пропускания, регулируемой в соответствии с пробным коэффициентом, передаваемым контроллером 211 центра фильтра/полосы.
В результате обработки интерполяции частоты часть 242 интерполяции частоты получает характеристику передачи всех поднесущих. Характеристику передачи, получаемую таким образом, выводят в часть 232 деления участка 214 коррекции искажения канала передачи.
Участок 216 расчета качества сигнала рассчитывает качество сигнала МОЧР в области частот, соответствующего одному символу, каждый раз, когда сигнал подают с помощью участка 214 коррекции искажения канала передачи. Рассчитанное таким образом качество выводят в участок 217 выбора оптимального значения как результат проверки. В качестве иллюстрации участок 216 расчета качества сигнала рассчитывает мощность шумов, включенных в сигнал МОЧР в области частот, и выводит рассчитанное значение. Участок 217 выбора оптимального значения последовательно сохраняет значения качества, рассчитываемые участком 216 расчета качества сигнала. Участок 217 выбора оптимального значения непрерывно получает рассчитанные значения качества, пока ширина и положение центра полосы пропускания фильтра интерполяции не изменятся для проверки по всем структурам и по законченным проверкам.
После получения результатов проверок по всем структурам участок 217 выбора оптимального значения выбирает фильтр интерполяции, используемый для генерирования сигнала МОЧР в области частоты с самым большим качеством, и идентифицирует ширину и положение центра полосы пропускания выбранного фильтра интерполяции.
Что касается сигнала МОЧР в области частот, состоящего из одного символа, который представляет собой цель для обработки, участок 217 выбора оптимального значения, таким образом, определяет фильтр интерполяции, имеющий определенную ширину его полосы пропускания, и определенное положение, как положение центра его полосы пропускания, при получении сигнала с наибольшим качеством.
Участок 217 выбора оптимального значения выводит в блок 197 фильтра интерполяции частоты коэффициент, представляющий ширину полосы пропускания выбранного фильтра интерполяции. Кроме того, участок 217 выбора оптимального значения выводит коэффициент, обозначающий положение центра полосы пропускания выбранного фильтра интерполяции в блоки 196 и 198 регулировки фазы и в блок 116 регулировки фазы.
Кроме того, участок 217 выбора оптимального значения рассматривает ширину такую же, как ширина полосы пропускания выбранного фильтра интерполяции, как представляющую разброс задержки, и выводит информацию, обозначающую этот разброс задержки в блок 133 определения второго положения символа, показанный на фиг.3.
В блоке 200 выбора оптимального коэффициента фильтра, как описано выше, сигналы, поступающие по другим путям, кроме основного пути, получаемые из блока 195 оценки канала передачи в направлении времени и передаваемые в блок 196 регулировки фазы, можно использовать при попытке обработки интерполяции частоты в соответствии с множеством условий, при которых изменяются ширина и положение центра полосы пропускания фильтра интерполяции.
Таким образом, становится возможным выбирать фильтр интерполяции, который позволяет получать выровненной сигнал с наивысшим качеством. При условии использования определенной ширины и положения центра полосы пропускания выбранного фильтра интерполяции, тот же фильтр интерполяции, как и выбранный фильтр, можно использовать для выполнения обработки интерполяции частоты для сигнала основного пути.
Последовательности этапов и процессов, описанных выше, могут выполняться либо с помощью аппаратных средств или с использованием программных средств. В случае, когда требуется выполнить обработку на основе программных средств, программы, составляющие программное средство, могут быть либо заранее встроены в специализированные аппаратные средства, такие, как компьютер, или могут устанавливаться во время использования из соответствующего носителя записи программы в персональный компьютер общего назначения или подобное оборудование для выполнения программы.
На фиг.22 показана блок-схема, представляющая типичную структуру аппаратных средств компьютера, используемого для выполнения программы, которая обрабатывают описанные выше этапы и процессы. На фиг.22 CPU (ЦПУ, центральное процессорное устройство) 501, ROM (ПЗУ, постоянное запоминающее устройство) 502, и RAM (ОЗУ, оперативное запоминающее устройство) 503 взаимно соединены с помощью шины 504.
Интерфейс 505 ввода/вывода также соединен с шиной 504. Интерфейс 505 ввода/вывода данных соединен с блоком 506 ввода и блоком 507 вывода. Блок 506 ввода типично состоит из клавиатуры и мыши, и блок 507 вывода сформирован в качестве иллюстрации из дисплея и громкоговорителей. Также к шине 504 подключены блок 508 накопителя, блок 509 передачи данных и привод 510, который обеспечивает привод съемного носителя 511 информации. Блок 508 накопителя типично состоит из жесткого диска и/или энергонезависимого запоминающего устройства, и блок 509 передачи данных состоит из сетевого интерфейса.
В компьютере, имеющем описанную выше структуру, ЦПУ 501 загружает программы в качестве иллюстрации из блока 508 накопителя в ОЗУ 503 через интерфейс 505 ввода/вывода данных и шину 504 для выполнения программы, осуществляя, таким образом, описанную выше последовательность этапов и процессов.
Программы, предназначенные для выполнения ЦПУ 501, в качестве иллюстрации могут быть переданы в записанном виде на съемном носителе 511 информации или могут быть предоставлены через кабельную или беспроводную среду передачи данных, такую как локальные вычислительные сети, сеть Интернет или другие каналы цифровой широковещательной передачи, перед установкой в блоке 508 накопителя.
Кроме того, программы для выполнения с помощью компьютера могут быть обработаны в представленной в данном описании последовательности (то есть на основе временной последовательности), параллельно или другим способом, в соответствующей временной последовательности, например, в соответствии с их вызовом.
Следует отметить, что вариант воплощения настоящего изобретения не ограничивается описанными выше вариантами воплощения, но различные модификации могут быть встроены в него без выхода за пределы объема и сущности настоящего изобретения.
Настоящая заявка содержит предмет изобретения, относящийся к описанному в приоритетной заявке на японский патент JP 2008-253299, поданной в японское патентное ведомство 30 сентября 2008 г., полное содержание которой приведено здесь в качестве ссылочного материала.
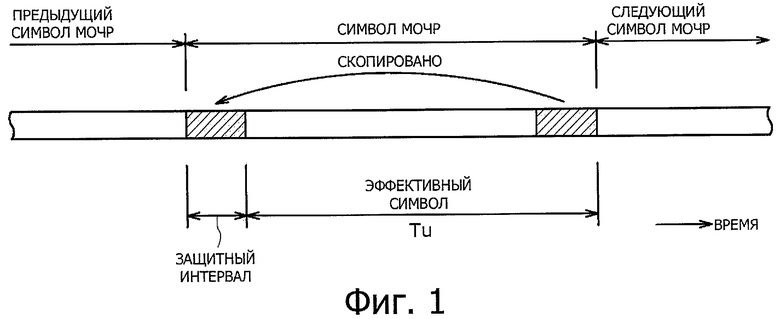
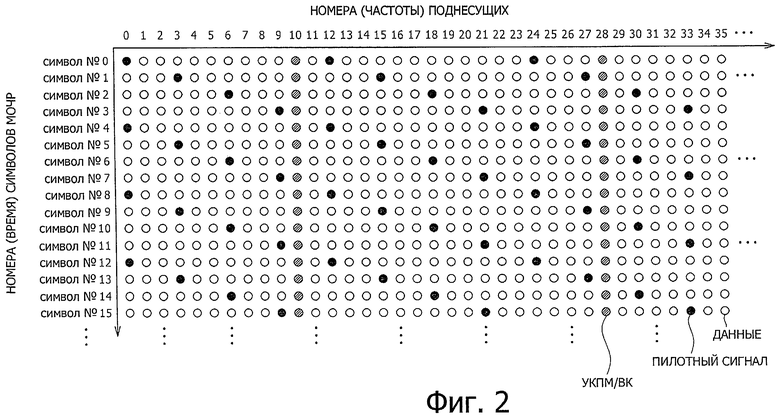
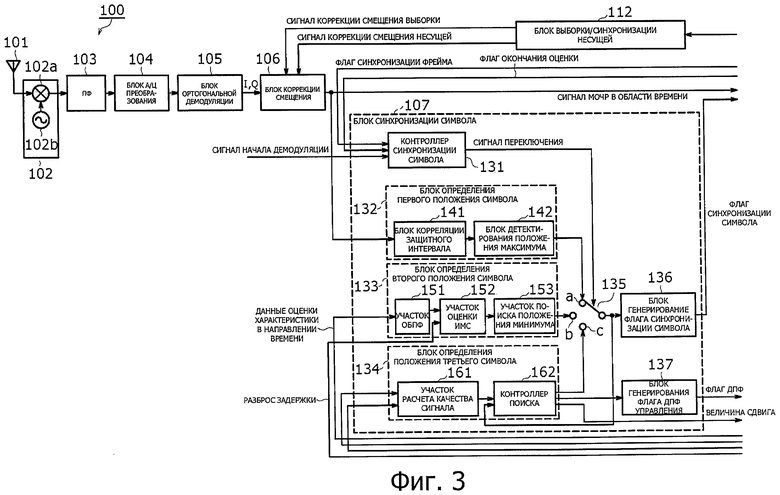
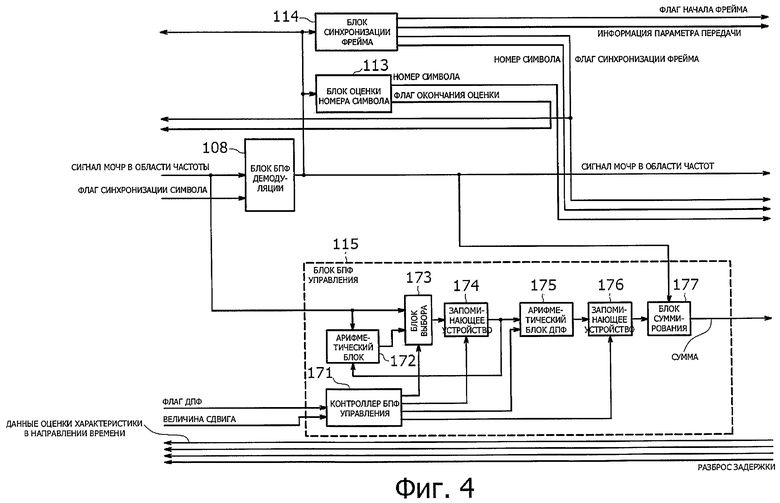
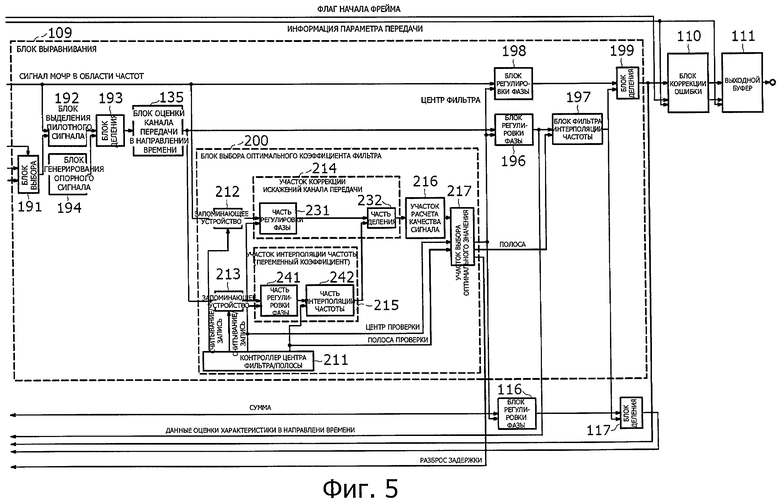
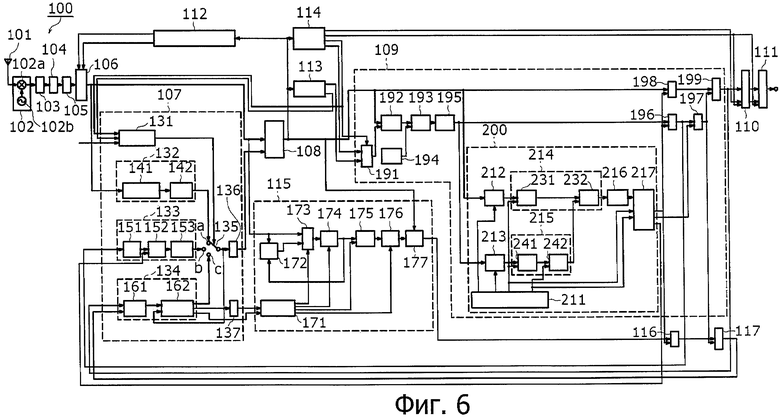
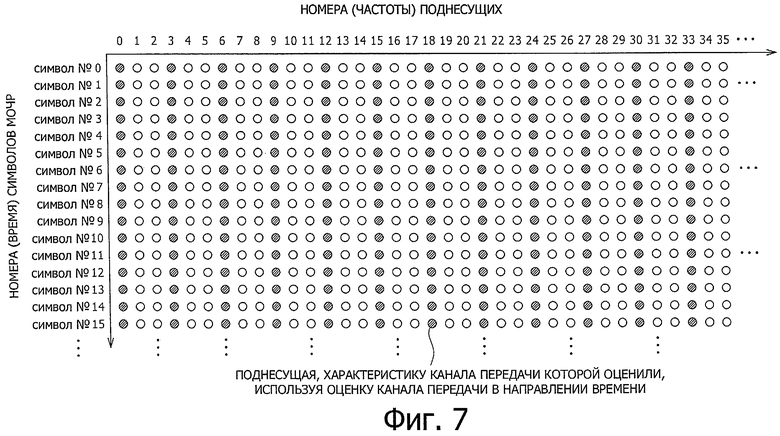
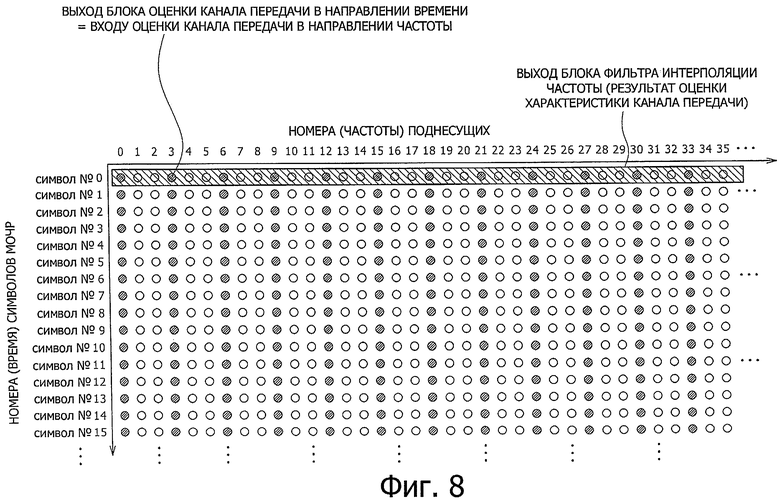
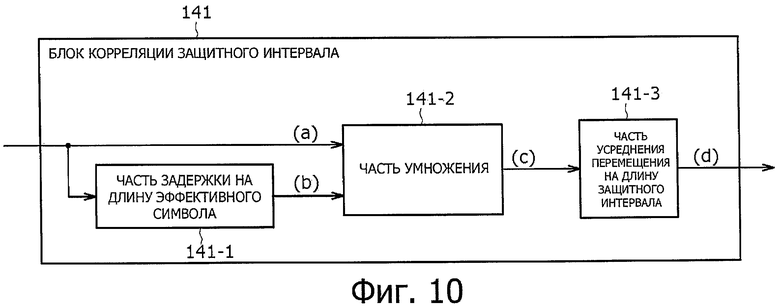
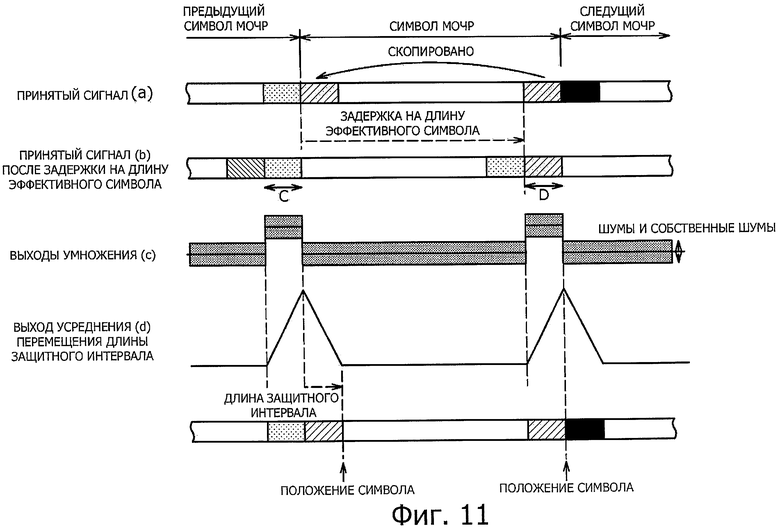
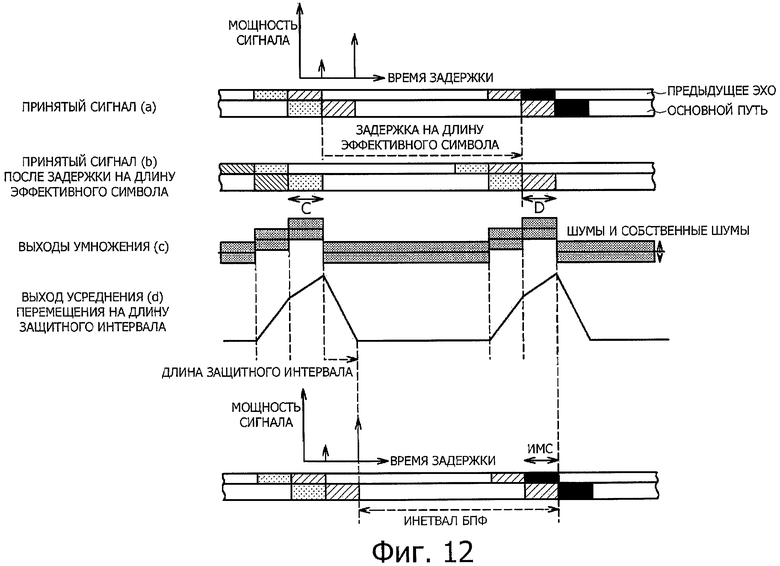
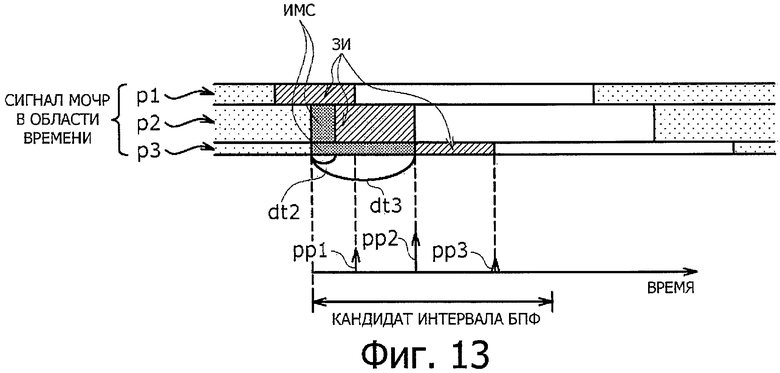
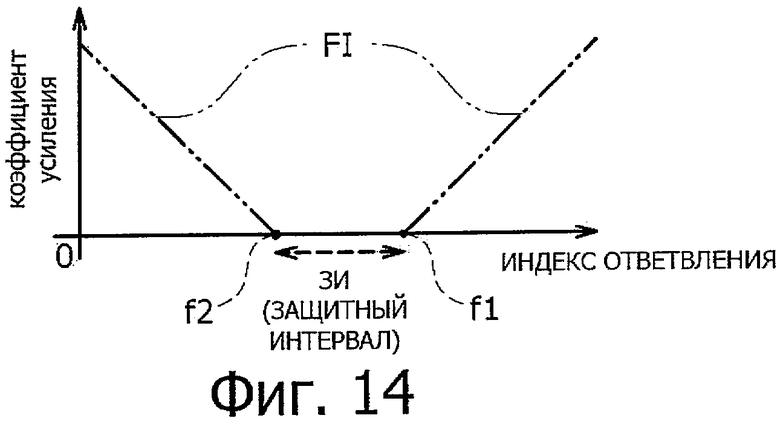
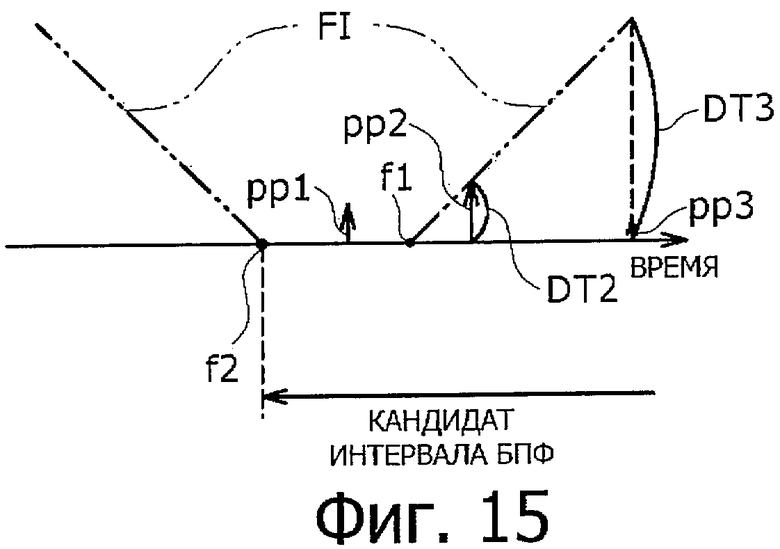
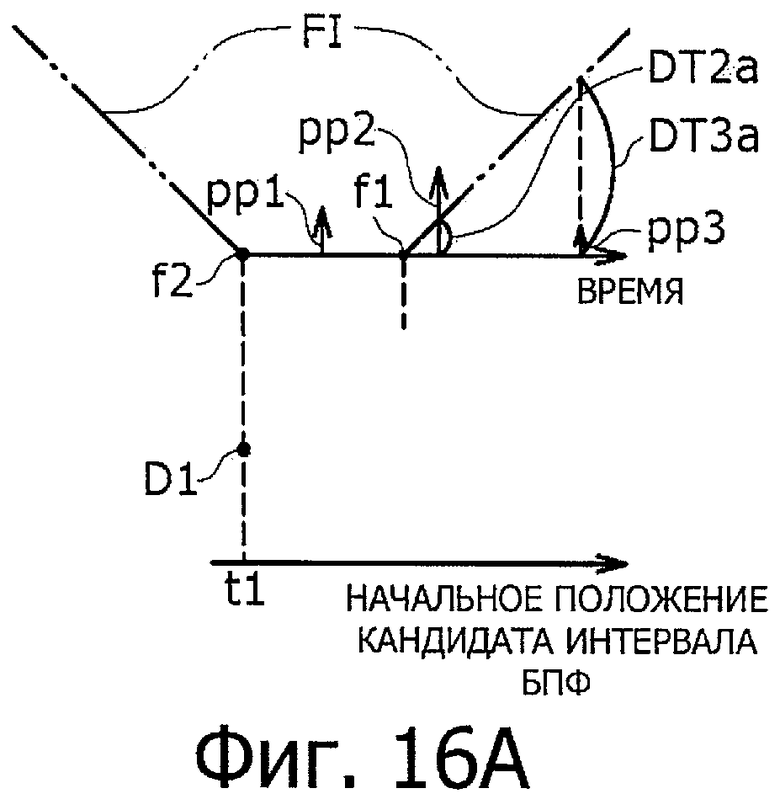
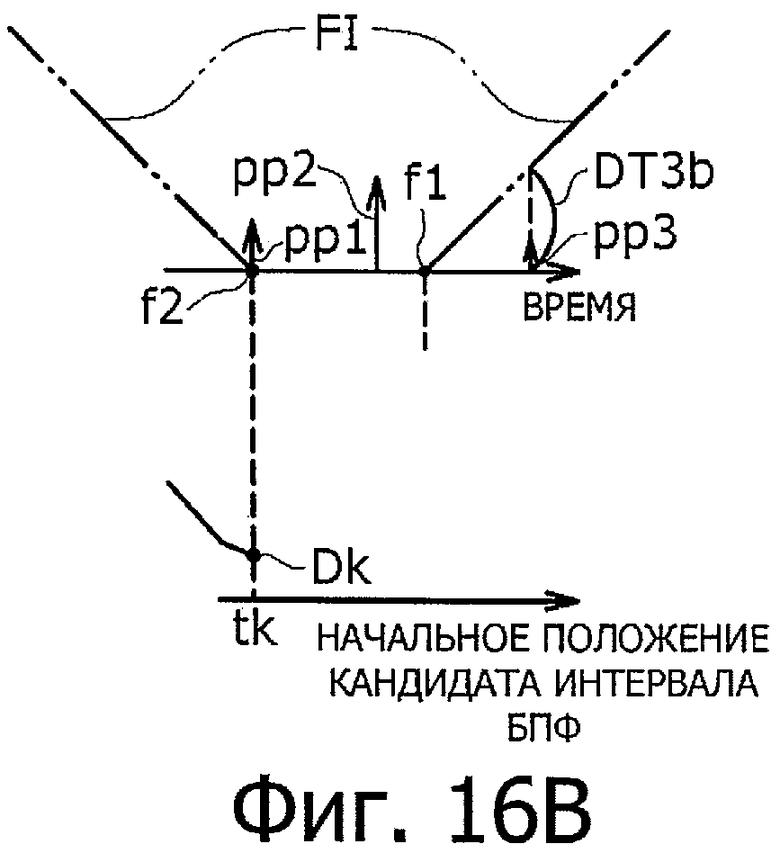
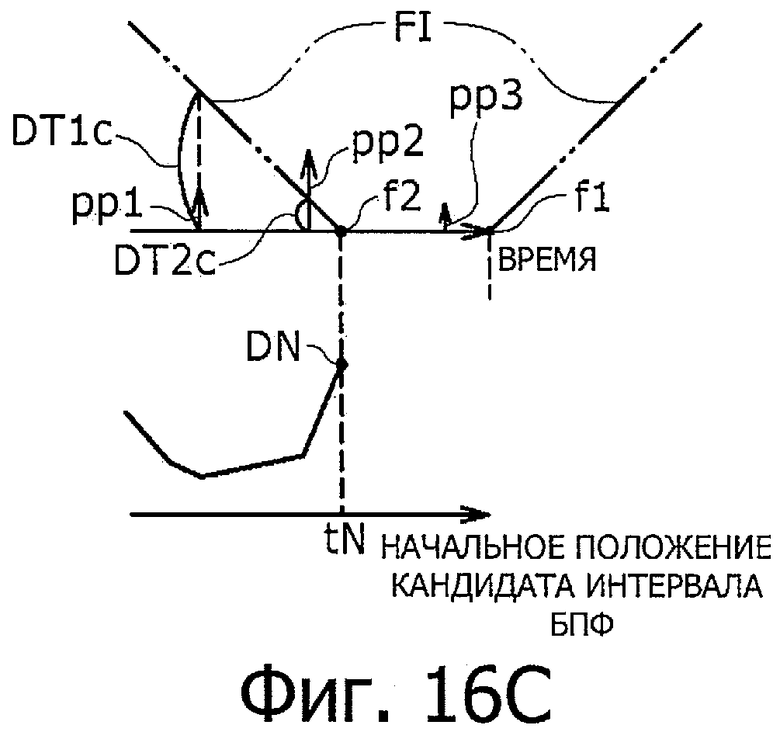
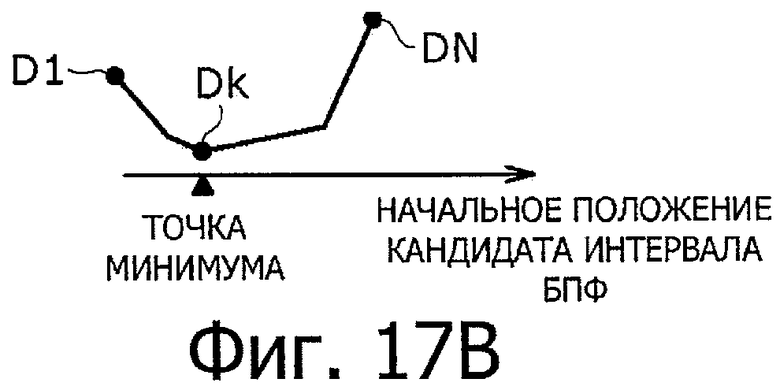
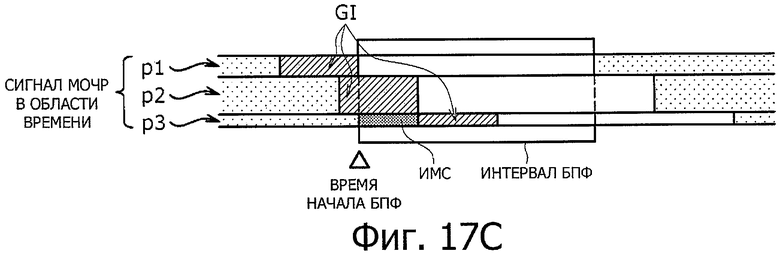
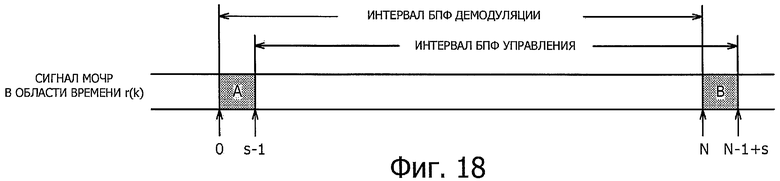
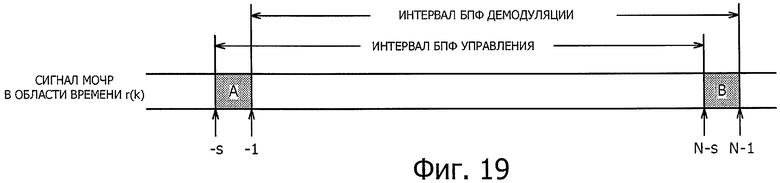
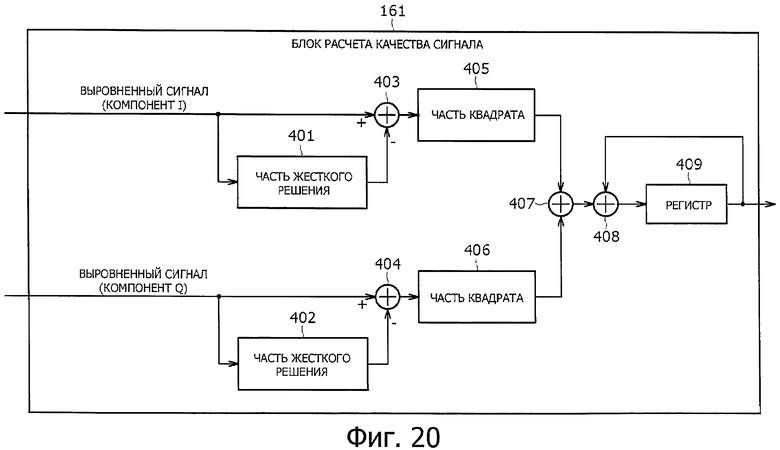
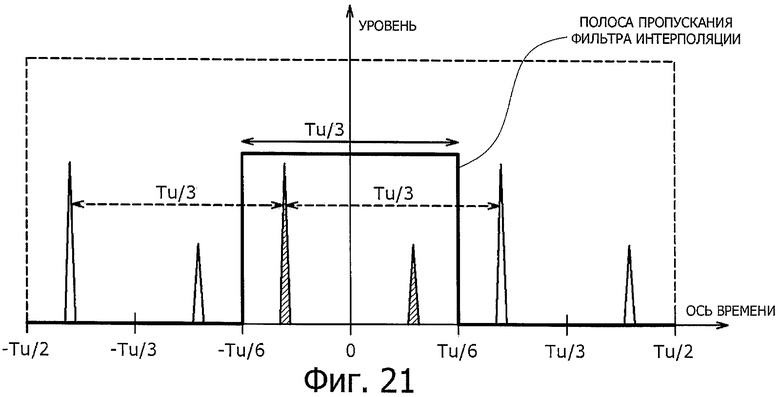
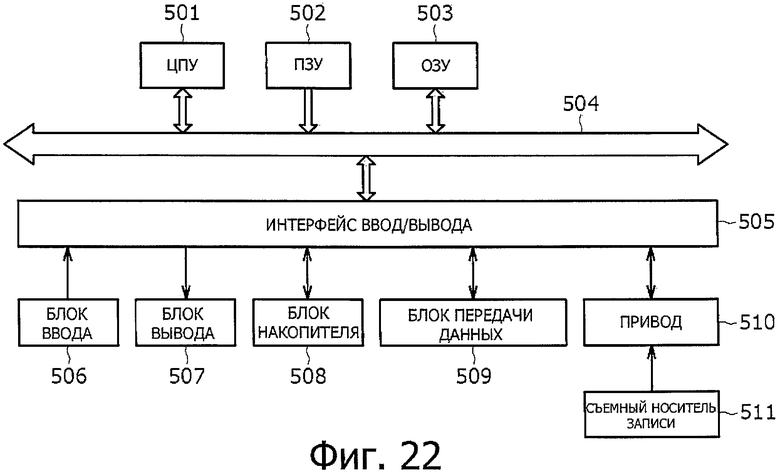
Изобретение относится к устройству и способу приема с использованием синхронизации символов OFDM (мультиплексирование с ортогональным частотным разделением, МОЧР). Техническим результатом является снижение многолучевой интерференции посредством регулировки сигнала синхронизации символа. Указанный результат достигается тем, что устройство приема содержит средства определения первого, второго и третьего положения начального положения интервала быстрого преобразования Фурье (БПФ), средство выбора одного из определенных начальных положений интервала БПФ, средство БПФ для выполнения быстрого преобразования Фурье сигнала МОЧР в области времени путем использования начального положения, выбранного средством выбора, для генерирования первого сигнала МОЧР в области частот. Средство определения первого положения рассчитывает значение корреляции между сигналом МОЧР в области времени и сигналом, полученным путем задержки упомянутого сигнала МОЧР в области времени на длину эффективного символа. Средство определения второго положения оценивает характеристики канала передачи сигнала МОЧР и профиль задержки перед оценкой величины интерференции между символами в отношении каждого из интервалов БПФ. Средство определения третьего положения устанавливает интервал БПФ со сдвигом относительно интервала БПФ, используемого для генерирования первого сигнала МОЧР, для генерирования второго сигнала МОЧР, перед удалением искажений из первого и второго сигналов МОЧР для генерирования выровненного сигнала. 3 н. и 5 з.п. ф-лы, 26 ил.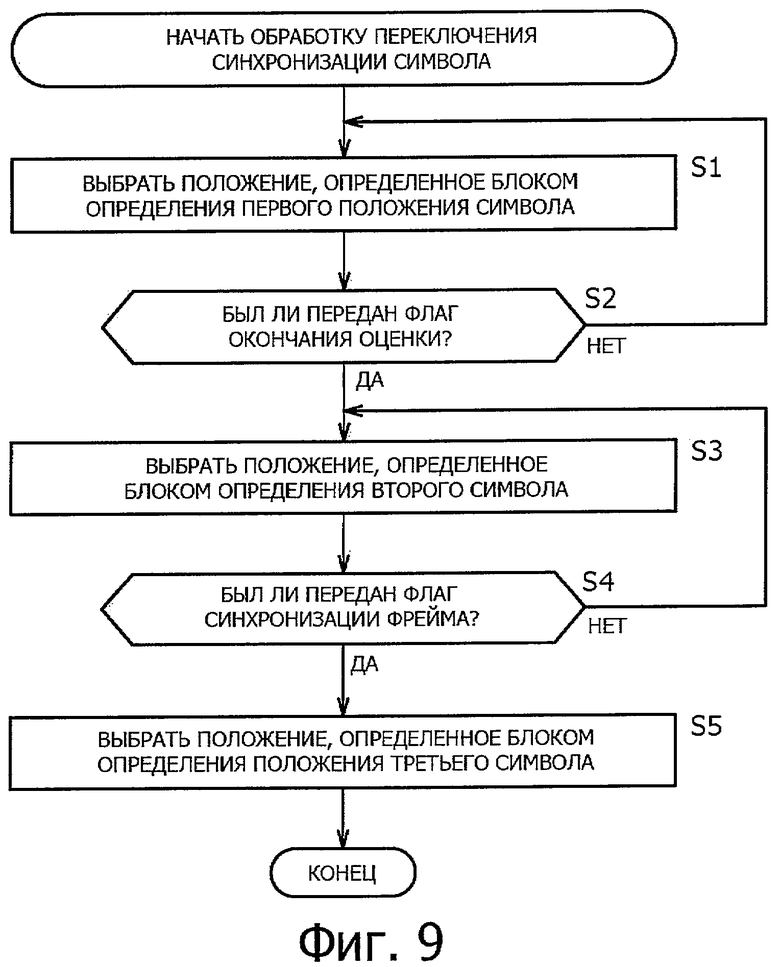
1. Устройство приема, содержащее:
средство определения первого положения, предназначенное для расчета значения корреляции между сигналом, мультиплексированным с ортогональным частотным разделением в области времени, составляющим сигнал, мультиплексированный с ортогональным частотным разделением в области времени, представляющим символ мультиплексирования с ортогональным частотным разделением, с одной стороны, и сигналом, полученным путем задержки упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, на длину эффективного символа, с другой стороны, для определения начального положения интервала быстрого преобразования Фурье, который равен упомянутой длине эффективного символа и который используется как интервал сигнала, представляющий собой цель быстрого преобразования Фурье, выполняемого с помощью средства быстрого преобразования Фурье, со ссылкой на наибольшее из упомянутых значений корреляции;
средство определения второго положения, предназначенное для оценки характеристик канала передачи известного сигнала, включенного в первый сигнал, мультиплексированный с ортогональным частотным разделением в области частот, составляющий сигнал, мультиплексированный с ортогональным частотным разделением в области частот, полученный путем выполнения быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, перед интерполяцией оценки характеристики канала передачи в направлении времени, для получения данных оценки характеристики канала передачи, перед выполнением обратного быстрого преобразования Фурье, для упомянутых данных оценки характеристики канала передачи, для оценки профиля задержки перед оценкой величины интерференции между символами в отношении каждого из множества кандидатов упомянутого интервала быстрого преобразования Фурье, на основе упомянутого профиля задержки, перед определением начального положения этого кандидата упомянутого интервала быстрого преобразования Фурье с наименьшей величиной интерференции между символами, в качестве начального положения упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье;
средство определения третьего положения, предназначенное для установки другого интервала быстрого преобразования Фурье в положении, установленном со сдвигом относительно упомянутого интервала быстрого преобразования Фурье, используемого для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед выполнением быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени в пределах этого упомянутого другого интервала быстрого преобразования Фурье, для генерирования второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед удалением искажений из упомянутого первого и второго сигналов, мультиплексированных с ортогональным частотным разделением частот в области частот, с использованием характеристик канала передачи каждой из всех поднесущих, полученных путем интерполяции упомянутых данных оценки характеристики канала передачи в направлении частоты, для генерирования выровненного сигнала, перед определением начального положения упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье, на основе качества генерируемого выровненного сигнала;
средство выбора, предназначенное для выбора одного из тех начальных положений упомянутого интервала быстрого преобразования Фурье, которые определены упомянутым средством определения с первого по третье положений; и
упомянутое средство быстрого преобразования Фурье, предназначенное для выполнения быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, путем использования начального положения, выбранного упомянутым средством выбора, в качестве начального положения упомянутого интервала быстрого преобразования Фурье, для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот.
2. Устройство приема по п.1, дополнительно содержащее средство оценки, предназначенное для оценки номера символа принятых данных на основе упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот;
в котором упомянутое средство выбора выбирает такое исходное положение упомянутого интервала быстрого преобразования Фурье, которое определено упомянутым средством определения первого положения, когда обозначают начало демодуляции, причем упомянутое средство выбора дополнительно выбирает такое начальное положение упомянутого интервала быстрого преобразования Фурье, которое выбирают с помощью упомянутого средства определения второго положения вместо начального положения, выбранного упомянутым средством определения первого положения, после завершения оценки номера символа упомянутым средством оценки.
3. Устройство приема по п.2, дополнительно содержащее средство синхронизации фрейма, предназначенное для синхронизации фрейма передачи с мультиплексированием с ортогональным частотным разделением, состоящего из множества символов, мультиплексированных с ортогональным частотным разделением, на основе упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот;
в котором, когда упомянутый фрейм передачи, мультиплексированный с ортогональным частотным разделением, синхронизируют с помощью упомянутого средства синхронизации фрейма, упомянутое средство выбора выбирает такое начальное положение упомянутого интервала быстрого преобразования Фурье, которое определяют с помощью упомянутого средства определения третьего положения, вместо начального положения, определенного упомянутым средством определения второго положения.
4. Устройство приема по п.1, в котором упомянутое средство определения первого положения определяет положение, установленное со сдвигом от наибольшего из упомянутых значений корреляции на длину защитного интервала, как начальное положение упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье.
5. Устройство приема по п.1, в котором упомянутое средство определения второго положения выполняет оценку величины интерференции между символами в отношении каждого из множества путей, составляющих многолучевое распространение, путем умножения длины в направлении времени, на которой происходит интерференция с другим символом, когда установлены упомянутые кандидаты упомянутого интервала быстрого преобразования Фурье, на мощность пути, для которого оказывает интерференцию упомянутый другой символ, и путем суммирования результатов произведений, полученных для каждого из упомянутых путей.
6. Устройство приема по п.1, в котором упомянутое средство определения третьего положения определяет начальное положение упомянутого интервала быстрого преобразования Фурье, используемое для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот, как начальное положение упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье, если качество выровненного сигнала, полученного из упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот, выше, чем качество выровненного сигнала, полученного из упомянутого второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, причем упомянутое средство определения третьего положения дополнительно определяет начальное положение упомянутого другого интервала быстрого преобразования Фурье, используемого для генерирования упомянутого второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, как начальное положение упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для следующего быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье, если качество выровненного сигнала, полученного из упомянутого второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, выше, чем качество выровненного сигнала, полученного из упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот.
7. Способ приема, содержащий следующие этапы:
обеспечивают расчет средством определения первого положения значений корреляции между сигналом, мультиплексированным с ортогональным частотным разделением в области времени, составляющим сигнал, мультиплексированный с ортогональным частотным разделением в области времени, представляющий символ мультиплексирования с ортогональным частотным разделением, с одной стороны, и сигналом, полученным путем задержки упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, на длину эффективного символа, с другой стороны, для определения начального положения интервала быстрого преобразования Фурье, который равен упомянутой длине эффективного символа и который используется как интервал сигнала, представляющего собой цель для быстрого преобразования Фурье, выполняемого средством быстрого преобразования Фурье, со ссылкой на самое большое из упомянутых значений корреляции;
обеспечивают выполнение оценки средством определения второго положения характеристик канала передачи известного сигнала, включенного в первый сигнал, мультиплексированный с ортогональным частотным разделением в области частот, составляющий сигнал, мультиплексированный с ортогональным частотным разделением в области частот, полученной путем выполнения быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, перед интерполяцией оценок характеристик канала передачи в направлении времени, для получения данных оценки характеристик канала передачи, перед выполнением обратного быстрого преобразования Фурье, для упомянутых данных оценки характеристики канала передачи, для оценки профиля задержки, перед оценкой величины интерференции между символами в отношении каждого из множества кандидатов упомянутого интервала быстрого преобразования Фурье, на основе упомянутого профиля задержки, перед получением начального положения этого кандидата упомянутого интервала быстрого преобразования Фурье, для которого величина интерференции между символами является наименьшей, как начального положения упомянутого интервала быстрого преобразования Фурье, для быстрого преобразования Фурье, выполняемого с помощью упомянутого средства быстрого преобразования Фурье;
обеспечивают установку средством определения третьего положения другого интервала быстрого преобразования Фурье в положении со сдвигом относительно упомянутого интервала быстрого преобразования Фурье, используемого для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед выполнением быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, в пределах упомянутого другого интервала быстрого преобразования Фурье, для генерирования второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед удалением искажений из упомянутого первого и второго сигналов, мультиплексированных с ортогональным частотным разделением в области частот, используя характеристики канала передачи каждой из всех поднесущих, полученных путем интерполяции упомянутых данных оценки характеристики канала передачи в направлении частоты, для генерирования выровненного сигнала, перед определением начального положения упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым средством быстрого преобразования Фурье, на основе качества генерируемого выровненного сигнала;
выбирают одно из тех начальных положений упомянутого интервала быстрого преобразования Фурье, которые определены с помощью средства определения упомянутого первого - упомянутого третьего положений; и
выполняют быстрое преобразование Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, используя выбранное начальное положение, выбранное как начальное положение упомянутого интервала быстрого преобразования Фурье, для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот.
8. Устройство приема, содержащее:
блок определения первого положения, выполненный с возможностью расчета величин корреляции между сигналом, мультиплексированным с ортогональным частотным разделением в области времени, составляющим сигнал, мультиплексированный с ортогональным частотным разделением в области времени, представляющий символ мультиплексирования с ортогональным частотным разделением, с одной стороны, и сигналом, полученным путем задержки упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, на длину эффективного символа, с другой стороны, для определения начального положения интервала быстрого преобразования Фурье, который равен упомянутой длине эффективного символа и который используется как интервал сигнала, представляющего собой цель для быстрого преобразования Фурье, выполняемого блоком быстрого преобразования Фурье, со ссылкой на самое большое из упомянутых значений корреляции;
блок детектирования второго положения, выполненный с возможностью оценки характеристик канала передачи известного сигнала, включенного в первый сигнал, мультиплексированный с ортогональным частотным разделением в области частот, составляющим сигнал, мультиплексированный с ортогональным частотным разделением в области частот, полученный путем выполнения быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, перед интерполяцией оценки характеристик канала передачи в направлении времени, для получения данных оценки характеристики канала передачи, перед выполнением обратного быстрого преобразования Фурье по упомянутым данным оценки характеристики канала передачи, для оценки профиля задержки, перед оценкой величины интерференции между символами относительно каждого из множества кандидатов упомянутого интервала быстрого преобразования Фурье, на основе упомянутого профиля задержки, перед определением начального положения этого кандидата упомянутого интервала быстрого преобразования Фурье, в котором величина интерференции между символами наименьшая, в качестве начального положения упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым блоком быстрого преобразования Фурье;
блок определения третьего положения, выполненный с возможностью устанавливать другой интервал быстрого преобразования Фурье в положении со сдвигом относительно упомянутого интервала быстрого преобразования Фурье, используемого для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед выполнением быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, в пределах упомянутого другого интервала быстрого преобразования Фурье, для генерирования второго сигнала, мультиплексированного с ортогональным частотным разделением в области частот, перед удалением искажения из упомянутых первого и второго сигналов, мультиплексированных с ортогональным частотным разделением в области частот, используя характеристики канала передачи каждой из всех поднесущих, полученных путем интерполяции упомянутых данных оценки характеристики канала передачи в направлении частоты, для генерирования выровненного сигнала, перед определением начального положения упомянутого интервала быстрого преобразования Фурье, представляющего собой цель для быстрого преобразования Фурье, выполняемого упомянутым блоком быстрого преобразования Фурье, на основе качества генерируемого выровненного сигнала;
блок выбора, выполненный с возможностью выбора одного из тех начальных положений упомянутого интервала быстрого преобразования Фурье, которые определены блоком определения с упомянутого первого по упомянутое третье положения; и
упомянутый блок быстрого преобразования Фурье, выполненный с возможностью выполнения быстрого преобразования Фурье для упомянутого сигнала, мультиплексированного с ортогональным частотным разделением в области времени, путем использования начального положения, выбранного упомянутым блоком выбора, в качестве начального положения упомянутого интервала быстрого преобразования Фурье, для генерирования упомянутого первого сигнала, мультиплексированного с ортогональным частотным разделением в области частот.
| Устройство для электротермомеханического разрушения горных пород | 1986 |
|
SU1416693A2 |
| JP 2004336279 A, 25.11.2004 | |||
| JP 2000332727 A, 30.11.2000 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ПЕРЕДАЧИ-ПРИЕМА ДАННЫХ В СИСТЕМЕ РАДИОСВЯЗИ (ВАРИАНТЫ), СПОСОБ ОЦЕНКИ ИНТЕРВАЛА КОРРЕЛЯЦИИ ПРИНЯТЫХ ОРТОГОНАЛЬНЫХ ЧАСТОТНО-МУЛЬТИПЛЕКСИРОВАННЫХ СИМВОЛОВ (ВАРИАНТЫ) И УСТРОЙСТВО ИХ РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2006 |
|
RU2310280C9 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДОПОЛНИТЕЛЬНОЙ ИНФОРМАЦИИ В ПЕРЕДАВАЕМОЙ ПО ЧАСТЯМ ПОСЛЕДОВАТЕЛЬНОСТИ В МЧРОК СИСТЕМЕ СВЯЗИ | 2003 |
|
RU2268547C2 |

