Изобретение относится к области радиотехники, в частности к способам оценки канала в многочастотных системах радиосвязи с несколькими передающими и приемными антеннами.
В последнее время для высокоскоростной беспроводной передачи данных широкое распространение получили многочастотные системы радиосвязи - OFDM (orthogonal frequency division multiplexing). В OFDM системах входной поток данных разделяется на несколько низкоскоростных потоков, которые передаются на различных поднесущих. При этом можно увеличивать скорость передачи данных, не уменьшая длительность символа и сохраняя межсимвольную помеху на приемлемо низком уровне. OFDM системы имеют также и другие преимущества по сравнению с традиционными одночастотными системами: устойчивость к многолучевому распространению радиосигнала, простота цифровой реализации, возможность адаптивной модуляции на различных гармониках (поднесущих) и др.
Заметим, что цифровой OFDM сигнал представляет собой последовательность многочастотных символов, объединенных в группы (фреймы). Каждый цифровой многочастотный символ состоит из N отсчетов данных и NCP отсчетов префикса. Отсчеты данных представляют собой сумму модулированных поднесущих. Обычно используют многоуровневые фазовые или амплитудно-фазовые виды модуляции. Отсчеты префикса располагаются перед отсчетами данных и представляют собой NСР последних отсчетов данных. Как правило, длительность префикса больше длительности импульсного отклика канала, т.е. интервала многолучевости. Наличие префикса при обработке сигнала позволяет уменьшить или полностью устранить межсимвольные помехи (см. Прокис Дж., Цифровая связь, Перевод с английского, М.: Радио и связь, 2000 г., с.593 [1]).
Передаваемое сообщение представляет собой последовательность информационных символов, в рассматриваемом случае - модулирующих поднесущих. В эту последовательность периодически вставляют известные пилот символы, предназначенные для оценки канала. Под оценкой канала понимается оценка комплексной огибающей поднесущих многочастотного сигнала, прошедшего через канал распространения.
Повышение требований к скорости передачи данных вызвало интерес к использованию многочастотных систем с несколькими передающими и приемными антеннами (в дальнейшем упоминается как MIMO-OFDM - Multiple-Input Multiple-Output). Проблема оценки канала в MIMO-OFDM системах осложняется тем, что при оценивании информационных символов используются оценки всех каналов системы, т.е. образованных всевозможными парами приемной и передающей антенн. Таким образом, ошибки оценок всех каналов участвуют в формировании оценки информационных параметров и ухудшают характеристики приема данных в значительно большей степени, чем в обычной OFDM системе с одной передающей и приемной антенной. Это накладывает существенно более жесткие требования к точности оценки канала в MIMO-OFDM системах.
Для некоторых типов MIMO-OFDM современных систем радиосвязи (см. IEEE 802.16d, IEEE 802.16е [2]) пилот символы одного многочастотного символа каждой передающей антенны модулируют разные поднесущие. При этом сигналы пилот-символов всех каналов системы не перекрываются ни по времени, ни по частоте. То есть для пилот символов отсутствует межканальная помеха. В этом случае оценка канала каждой пары приемной и передающей антенн может выполняться раздельно, аналогично случаю OFDM системы с одной передающей и приемной антенной.
В системах связи каналы распространения сигнала между приемником и передатчиком данных являются многолучевыми и нестационарными. Эффективность MIMO-OFDM систем связи во многом определяется способностью алгоритма оценки канала обеспечить в многолучевых нестационарных каналах необходимую точность оценки канала.
Важным требованием к современным высокоскоростным беспроводным системам связи является мобильность их абонентов. При высокой скорости движения абонента изменения канала, т.е. комплексной огибающей принимаемого сигнала, определяемые доплеровской частотой, являются достаточно быстрыми. С точки зрения оценки канала это создает дополнительные трудности ввиду невозможности длительного усреднения во времени.
Заметим, что в OFDM системах связи оценка комплексной огибающей осуществляется в двумерной частотно-временной области после быстрого преобразования Фурье (БПФ) отсчетов многочастотных символов. Поэтому для демодуляции данных необходима оценка частотного отклика канала, который представляет собой Фурье преобразование импульсного отклика канала. Оценка канала осуществляется одним из методов интерполяции по пилот-символам, расположенным в известных позициях частотно-временной области.
Известны способы оценки канала, описанные в работе М.Morelli, U.Mengali A Comparison of Pilot-Aided Channel Estimation Methods for OFDM Systems IEEE, Transactions on Signal Processing, vol.49, no.12 December 2001 pp.3065-3073 [3]. В этой работе рассмотрены метод максимального правдоподобия (МП) и байесовский метод оценки импульсного отклика канала по пилот-символам.
В соответствии с описанным методом МП оценка импульсного отклика канала многочастотного символа имеет вид
где  Np - число пилот-символов в одном многочастотном символе, in - позиция n-го пилот-символа, L - длина канала (длина импульсного отклика канала в отсчетах), N - размерность БПФ (общее число поднесущих), Z - вектор значений комплексных огибающих пилот-символов.
Np - число пилот-символов в одном многочастотном символе, in - позиция n-го пилот-символа, L - длина канала (длина импульсного отклика канала в отсчетах), N - размерность БПФ (общее число поднесущих), Z - вектор значений комплексных огибающих пилот-символов.
Оценка частотного отклика канала определяется как
где  а
а  определяется формулой (1).
определяется формулой (1).
Заметим, что при интерполяции по методу МП не требуется знания статистики канала (используется только длина канала L), а коэффициенты интерполяции зависят только от положения пилот-символов и могут быть вычислены заранее. Реализация алгоритма МП требует обращения матрицы ВНВ. Это возможно, если матрица В имеет полный ранг и Np≥L. To есть, число пилот-символов должно быть не меньше, чем длина канала.
В соответствии с байесовским методом оценка импульсного отклика канала многочастотного символа имеет вид

где Сh=E(hhH) - ковариационная матрица h.
Окончательно, оценка частотного отклика канала определяется в соответствии с выражением (2), где h определяется формулой (3).
При интерполяции по байесовскому методу требуется знание мощности шума и ковариационной матрицы Сh (статистики канала).
Это усложняет алгоритм, но увеличивает его точность по сравнению с методом МП.
На фиг.1 представлена структурная схема байесовского и МП алгоритмов оценки канала.
Таким образом, основным преимуществом МП по сравнению с байесовским методом является то, что он не требует знания статистики канала и уровня шума и, таким образом, является проще для реализации. С другой стороны, байесовский алгоритм имеет более высокую точность, так как он использует информацию о статистике канала.
Ограниченное число пилот-символов, т.е. тонов, многочастотного символа ограничивает длину канала, которая может быть учтена методом МП. Поэтому для длинных каналов часть интервала многолучевости не может быть учтена, и метод максимального правдоподобия оценки канала оказывается неработоспособным.
Байесовский алгоритм использует данные об уровне шума и статистике канала, а именно, о профиле многолучевости и частоте Доплера. Так как эта информация, как правило, отсутствует, эти параметры фиксируют для некоторых усредненных или неблагоприятных условий приема. Такие устройства оценки с фиксированным дизайном имеют простую реализацию, но их характеристики существенно ухудшаются с ростом числа передающих и приемных антенн MIMO-OFDM системы и по мере рассогласования статистики реального канала от проектируемой статистики канала.
В публикации X.Wang, К.J.R.Liu OFDM Channel Estimation Based on Time-Frequency Polynomial Model of Fading Multipath Channels, IEEE GLOBECOM 2001 San Antonio, Texas, USA, November 25-29, 2001 [4] рассмотрен алгоритм полиномиальной интерполяции в частотно-временной области. Частотный отклик канала изменяется достаточно плавно как в частотном, так и во временном направлениях. Известно, что такую гладкую функцию можно хорошо представить в виде ряда разложения по конечному набору базисных функций. Используется разложение частотного отклика канала в окне размером (2I+1)Δƒ×(2К+1)Т (Δƒ=1/NTs - разность частот соседних поднесущих, Т - длительность многочастотного символа) по небольшому набору функций полиномиального базиса около центральной точки n0, k0, т.е.,

где Hn0,k0(jm), 
 - параметры полинома,
- параметры полинома,
k0-K≤k≤k0+K, n0-I≤n≤n0+I.
Одной из трудностей использования полиномиального алгоритма является сложность адаптации порядка полиномов и размера окна к статистике канала. Кроме того, при длинных каналах между соседними пилот-символами возникают быстрые изменения комплексной огибающей в частотной области. Рабочее отношения сигнал-шум в системах MIMO-OFDM достаточно мало. Моделирование показало, что в данных условиях точность оценки канала для MIMO-OFDM систем с использованием полиномиального алгоритма является неудовлетворительным.
Известны способы оценки канала, описанные в работе М.Sandell and O.Edfors, A comparative study of pilot-based channel estimators for wireless OFDM, Div. Signal Processing, Lulea Univ. Technology, Lulea, Sweden, Res. Rep. TULEA 1996:19, Sept. 1996 [5]. В этой работе рассмотрены два подхода к оценке канала: двумерная (2D) интерполяция и раздельная (2×1D) интерполяция.
В работе показано, что оптимальная линейная оценка канала является результатом двумерной частотно-временной интерполяции. Объединим используемые оценки канала пилот-символов в вектор Z, а получаемые оценки канала информационных символов в вектор Н. Тогда оценка канала, минимизирующая средний квадрат ошибки, равна
где RHZ - кроссковариационная матрица векторов Н и Z; RZZ - автоковариационная матрица вектора Z. В зависимости от числа используемых пилот-символов и их относительных позиций вектора Z и соответствующей автоковариационной матрицы RZZ меняются. Матрица RHZ зависит от относительного положения оцениваемых информационных и пилот-символов. На фиг.2 показана схема двумерной частотно-временной интерполяции. Оценка канала информационного символа (×) представляет собой линейную комбинацию 7-ми пилот-символов (▪).
Описанный метод двумерной (2D) интерполяции использует данные об уровне шума и статистике канала. Так как эта информация, как правило, отсутствует, в работе используется фиксация этих параметров для некоторых условий приема. Кроме того, сложность реализации двумерной (2D) интерполяции достаточно велика для практических приложений.
Наиболее близким к заявляемому решению является метод оценки канала с раздельной (2×1D) интерполяцией, приведенный в работе М.Sandell and О.Edfors, A comparative study of pilot-based channel estimators for wireless OFDM. Div. Signal Processing, Lulea Univ. Technology, Lulea, Sweden, Res. Rep. TULEA 1996:19, Sept. 1996 [6]. При этом подходе интерполяция в частотном и временном направлениях производится раздельно.
Предполагается, что выполнены процедуры фильтрации входного сигнала, его усиления, переноса на видеочастоту, аналого-цифрового преобразования, частотно-временной синхронизации.
Способ оценки канала в многочастотных системах радиосвязи прототипа заключается в следующем:
- для каждого многочастотного символа фрейма формируют корреляционные отклики пилот-символов, используя результат синхронизации и осуществляя дискретное преобразование Фурье над блоком отсчетов входного цифрового комплексного сигнала, соответствующим этому многочастотному символу,
- получают значения частотных откликов канала пилот символов фрейма, формируя отношения корреляционных откликов соответствующих пилот-символов фрейма к априори известным значениям этих символов,
- формируют опорные символы, осуществляя интерполяцию частотного отклика канала в частотном направлении для многочастотных символов фрейма, в которых присутствуют пилот-символы, путем взвешенного суммирования значений частотных откликов канала пилот-символов многочастотного символа с весами, определяемыми предполагаемой автоковариационной функцией частотного отклика канала многочастотной системы в частотном направлении, относительным расположением пилот-символов многочастотных символов, относительным расположением интерполируемого символа и пилот-символов, а также предполагаемым отношением сигнал - шум,
- осуществляют интерполяцию частотного отклика канала во временном направлении для каждой поднесущей путем взвешенного суммирования значений частотных откликов канала опорных символов поднесущей с весами, определяемыми предполагаемой автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, относительным расположением опорных символов каждой поднесущей, относительным расположением интерполируемого символа и опорных символов, а также предполагаемым отношением сигнал - шум, в результата получая окончательную оценку канала многочастотной системы, которую в дальнейшем используют при демодуляции информационных символов
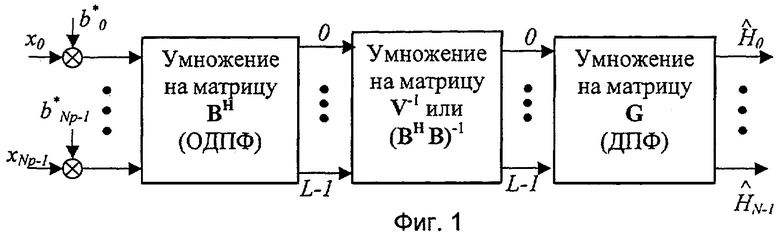
Реализация способа прототипа представлена на фиг.3. Предполагается, что выполнены процедуры фильтрации входного сигнала, его усиления, переноса на видеочастоту, аналого-цифрового преобразования, частотно временной синхронизации. На входы устройства прототипа, а именно на входы блока формирования корреляционных откликов пилот-символов 1 поступают синфазные и квадратурные составляющие входного цифрового комплексного сигнала. На управляющий вход блока 1 поступает импульсный сигнал синхронизации, импульсы которого (сигналы, равные логической единице) соответствуют моментам времени окончания очередного многочастотного символа фрейма. По сигналу окончания очередного многочастотного символа блок формирования корреляционных откликов пилот-символов 1 формирует на своем выходе синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-символов, которые поступают на блок оценки канала 2, а именно на вход узла формирования значений частотных откликов канала пилот-символов 3. Значения частотных откликов канала, т.е. синфазные и квадратурные составляющие, формируются путем известной процедуры комплексного деления комплексных корреляционных откликов пилот-символов на априори известные значения этих символов. Сформированные в узле 3 синфазные и квадратурные составляющие частотных откликов канала пилот-символов поступают в узел интерполяции в частотном направлении 4 блока оценки канала 2, где формируются комплексные опорные символы путем взвешенного суммирования комплексных частотных откликов канала пилот-символов многочастотного символа с априори известными весами. Окончательная оценка канала многочастотной системы формируется в узле интерполяции во временном направлении 5 блока оценки канала 2 путем взвешенного суммирования синфазных и квадратурных составляющих комплексных частотных откликов канала опорных пилот символов каждой поднесущей с априори известными весами. Полученная оценка, т.е. синфазные и квадратурные составляющие частотных откликов канала всех поднесущих многочастотных символов, является выходом блока оценки канала 2 и устройства прототипа.
В алгоритме прототипа используется ограниченное количество пилот-символов ввиду конечного интервала корреляции в частотном и временном направлениях. Это снижает эффективность этого алгоритма оценки канала. Кроме того, результаты моделирования доказывают, что алгоритмы с фиксированным дизайном, к которым относится прототип, являются неэффективными для систем MIMO-OFDM, особенно с увеличением числа приемных и передающих антенн. Это объясняется значительной разницей между реальной статистикой канала и статистикой канала, используемой в алгоритме оценки канала. Заметим также, что для алгоритмов с фиксированным дизайном имеет место проблема обращения корреляционной матрицы. Это ограничивает длину канала, которую может учесть алгоритм с фиксированным дизайном.
Таким образом, высокая точность оценки канала для систем MIMO-OFDM требует качественной оценки статистики канала. В противном случае эффективная оценка канала невозможна.
Задача, которую решает заявляемое изобретение, заключается в повышении точности оценки канала в многочастотных системах радиосвязи с несколькими передающими и приемными антеннами для произвольных, в том числе длинных импульсных откликов канала, при произвольных, в том числе высоких скоростях движения мобильного абонента.
Технический результат достигается за счет использования нового способа оценки канала в многочастотных системах радиосвязи с несколькими передающими и приемными антеннами, заключающегося в следующем.
- Для каждой приемной антенны, для каждого многочастотного символа фрейма формируют корреляционные отклики пилот символов, используя результат синхронизации и осуществляя дискретное преобразование Фурье над блоком отсчетов входного цифрового комплексного сигнала, соответствующим этому многочастотному символу.
- Для каждой приемной антенны получают значения частотных откликов канала, соответствующих пилот-символам фрейма каждой из передающих антенн, используя корреляционные отклики пилот-символов всех приемных антенн и информацию о положении пилот символов.
- Усредняют значения частотных откликов канала пилот-символов фрейма по всем парам передающей и приемной антенн.
- Для каждой пары передающей и приемной антенн, для каждой поднесущей, в которой присутствуют пилот-символы передающей антенны, формируют Q отсчетов автокорреляционной функции частотного отклика канала во временном направлении, используя значения частотных откликов канала пилот-символов фрейма этой поднесущей.
- Усредняют значения отсчетов автокорреляционной функции частотного отклика канала во временном направлении по всем поднесущим, в которых присутствуют пилот-символы передающей антенны, и всем парам передающих и приемных антенн многочастотной системы.
- Формируют отсчеты автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, используя усредненные отсчеты автокорреляционной функции частотного отклика канала во временном направлении и среднее значение частотных откликов канала пилот-символов фрейма.
- Формируют оценку круговой частоты Доплера многочастотной системы, используя отсчеты автоковариационной функции частотного отклика канала многочастотной системы во временном направлении,
для чего
- для каждого отсчета автоковариационной функции частотного отклика канала многочастотной системы во временном направлении из заданного интервала значений вычисляют оценку круговой частоты Доплера,
- усредняют вычисленные оценки круговой частоты Доплера
- получают оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, используя оценку круговой частоты Доплера,
- для каждой пары приемной и передающей антенн многочастотной системы формируют опорные символы всех многочастотных символов фрейма, осуществляя интерполяцию частотного отклика канала во временном направлении для поднесущих, в которых присутствуют пилот-символы передающей антенны, путем взвешенного суммирования значений частотных откликов канала пилот-символов поднесущей с весами, определяемыми оценкой автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, относительным расположением пилот-символов поднесущей, относительным расположением интерполируемого символа и пилот-символов поднесущей, а также предполагаемым отношением сигнал - шум,
- для каждого фрейма оценивают профиль многолучевости многочастотной системы, используя опорные символы,
для чего
- для каждой пары приемной и передающей антенн для каждого многочастотного символа по опорным символам этого многочастотного символа формируют доступные отсчеты автокорреляционной функции частотного отклика канала в частотном направлении, которые определяются взаимным расположением опорных символов,
- находят доступные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, усредняя сформированные доступные отсчеты автокорреляционной функции частотного отклика канала в частотном направлении по всем многочастотным символам всех пар приемной и передающей антенн,
- интерполируют отсутствующие отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, используя доступные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- объединяют доступные и интерполированные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- корректируют объединенные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, умножая эти отсчеты на коэффициенты сглаживающего окна,
- формируют предварительную оценку профиля многолучевости многочастотной системы текущего фрейма, выполняя дискретное преобразование Фурье скорректированных отсчетов автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- формируют оценку профиля многолучевости многочастотной системы текущего фрейма, осуществляя взвешенное суммирование предварительной оценки профиля многолучевости многочастотной системы текущего фрейма и оценки профиля многолучевости многочастотной системы предыдущего фрейма,
- осуществляют выбор тех элементов оценки профиля многолучевости многочастотной системы текущего фрейма, которые превышают заданный порог,
- для каждой пары приемной и передающей антенн многочастотной системы для всех многочастотных символов фрейма осуществляют интерполяцию частотного отклика канала в частотном направлении путем взвешенного суммирования значений частотных откликов канала опорных символов многочастотного символа с весами, определяемыми выбранными элементами оценки профиля многолучевости многочастотной системы текущего фрейма и позициями этих элементов, относительным расположением опорных символов, относительным расположением интерполируемого символа и опорных символов, а также предполагаемым отношением сигнал - шум, в результате получая окончательную оценку канала многочастотной системы, которую в дальнейшем используют при демодуляции информационных символов.
Причем значения частотных откликов канала, соответствующих пилот-символам фрейма каждой из передающих антенн, получают формируя отношения корреляционных откликов соответствующих пилот-символов фрейма к априори известным значениям этих символов.
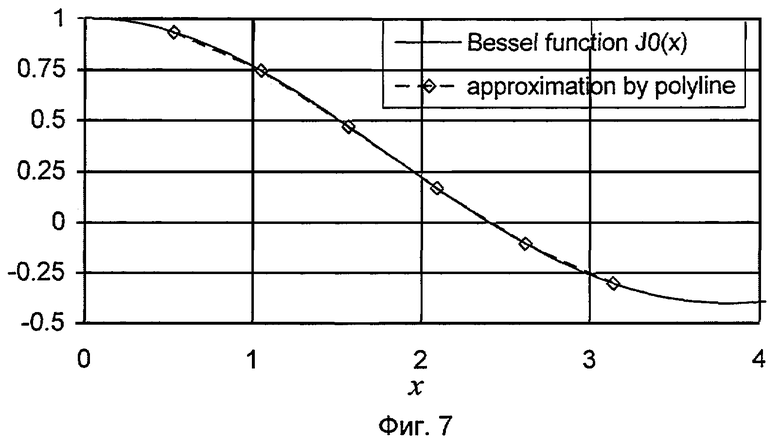
Оценку круговой частоты Доплера вычисляют по формуле, основанной на аппроксимации функции Бесселя ломаной линией.
Оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении определяют, подставляя оценку круговой частоты Доплера в функцию Бесселя нулевого порядка первого рода.
Сопоставительный анализ предлагаемого решения с прототипом показывает, что операции предлагаемого способа отличаются от операций прототипа следующим.
В прототипе сначала выполняют интерполяцию в частотном направлении, а затем во временном. В предлагаемом способе сначала выполняют интерполяцию во временном направлении, а затем в частотном. За счет этого увеличивается число опорных символов и, соответственно, качество интерполяции в частотном направлении, что наиболее важно для длинных каналов.
В прототипе для интерполяции в частотном и временном направлениях используют предполагаемые автоковариационные функции частотного отклика канала многочастотной системы в частотном и временном направлениях. В предлагаемом способе для интерполяции в частотном и временном направлениях используют оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении и оценку профиля многолучевости многочастотной системы. Соответственно, все операции, связанные с получением этих оценок, в прототипе отсутствуют. За счет этого обеспечивается более высокая адекватность предлагаемого способа статистике канала, что приводит к существенному увеличению точности оценки канала.
Сопоставительный анализ заявляемого решения с другими техническими решениями в данной области техники не позволил выявить в них наличия отличительных признаков, заявленных в формуле изобретения. Таким образом, представляется, что заявляемое решение отвечает критериям "новизна", "техническое решение задачи", "промышленная применимость".
Графические материалы, представленные в материалах заявки:
Фиг.1 - структура байесовского алгоритма и алгоритма максимального правдоподобия оценки канала.
Фиг.2 - пример двумерной частотно-временной интерполяции.
Фиг.3 - вариант реализации способа-прототипа.
Фиг.4 - вариант реализации предлагаемого способа.
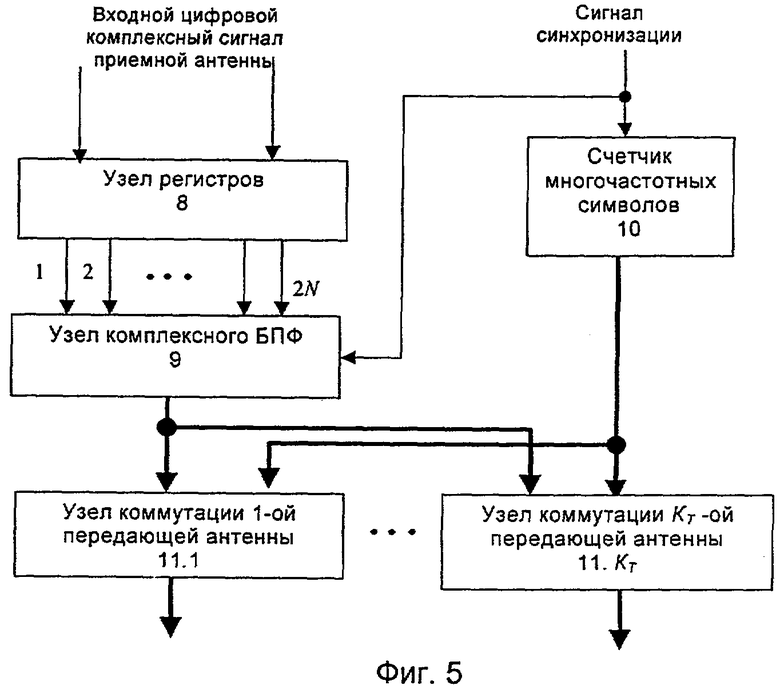
Фиг.5 - вариант выполнения блока формирования корреляционных откликов пилот-символов.
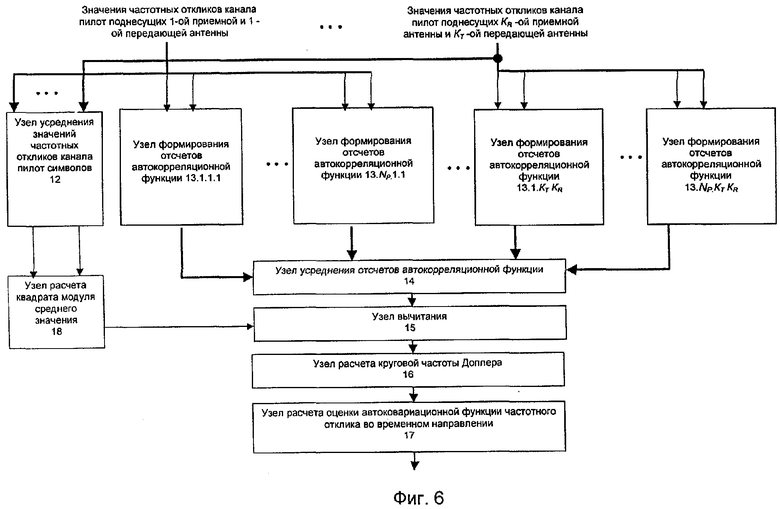
Фиг.6 - вариант выполнения блока оценки статистики канала во временном направлении.
Фиг.7 - функция Бесселя и ее аппроксимация ломаной линией.
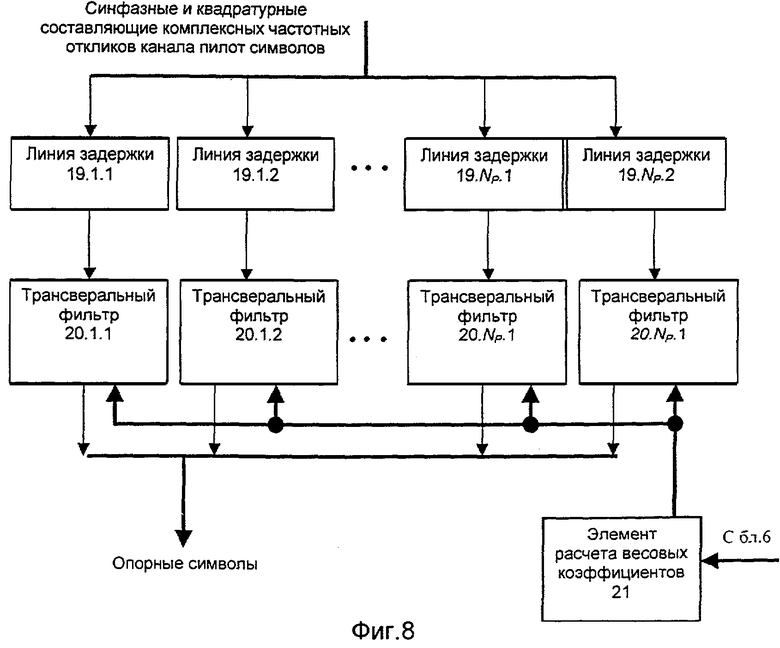
Фиг.8 - вариант выполнения узла интерполяции во временном направлении.
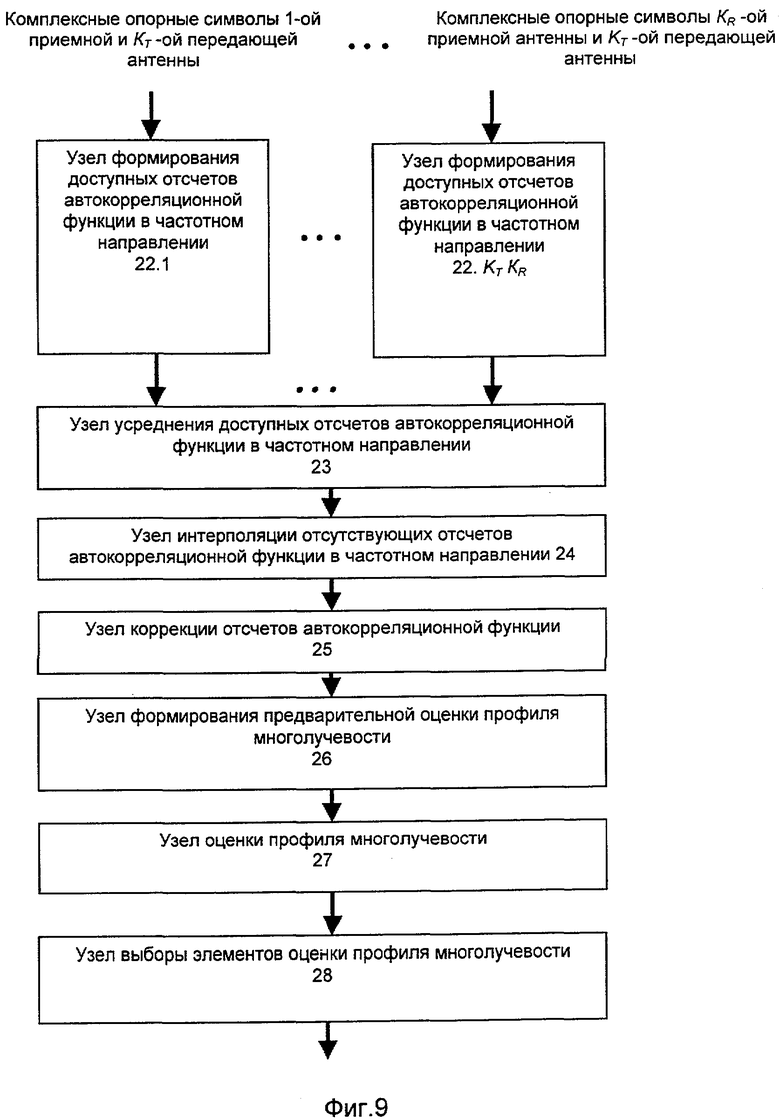
Фиг.9 - вариант выполнения блока оценки статистики канала в частотном направлении.
Фиг.10 - вариант выполнения узла интерполяции в частотном направлении.
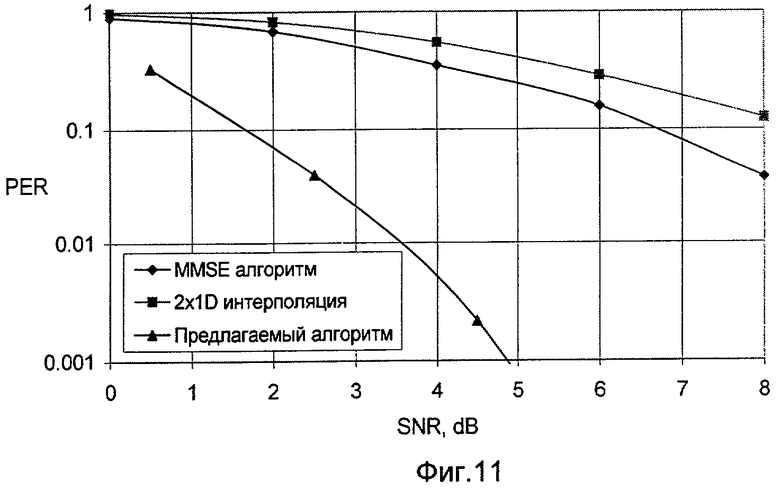
Фиг.11 - пример зависимости PER (вероятности пакетной ошибки) от отношения энергии бита к спектральной плотности мощности шума Еb/N0.
Предлагаемый способ заключается в следующем.
- Для каждой приемной антенны, для каждого многочастотного символа фрейма формируют корреляционные отклики пилот-символов, используя результат синхронизации и осуществляя дискретное преобразование Фурье над блоком отсчетов входного цифрового комплексного сигнала, соответствующим этому многочастотному символу.
- Для каждой приемной антенны получают значения частотных откликов канала, соответствующих пилот-символам фрейма каждой из передающих антенн, используя корреляционные отклики пилот символов всех приемных антенн и информацию о положении пилот-символов.
- Усредняют значения частотных откликов канала пилот символов фрейма по всем парам передающей и приемной антенн.
- Для каждой пары передающей и приемной антенн, для каждой поднесущей, в которой присутствуют пилот-символы передающей антенны, формируют Q отсчетов автокорреляционной функции частотного отклика канала во временном направлении, используя значения частотных откликов канала пилот-символов фрейма этой поднесущей.
- Усредняют значения отсчетов автокорреляционной функции частотного отклика канала во временном направлении по всем поднесущим, в которых присутствуют пилот-символы передающей антенны, и всем парам передающих и приемных антенн многочастотной системы.
- Формируют отсчеты автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, используя усредненные отсчеты автокорреляционной функции частотного отклика канала во временном направлении и среднее значение частотных откликов канала пилот-символов фрейма.
- Формируют оценку круговой частоты Доплера многочастотной системы, используя отсчеты автоковариационной функции частотного отклика канала многочастотной системы во временном направлении,
для чего
- для каждого отсчета автоковариационной функции частотного отклика канала многочастотной системы во временном направлении из заданного интервала значений вычисляют оценку круговой частоты Доплера,
- усредняют вычисленные оценки круговой частоты Доплера,
- получают оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, используя оценку круговой частоты Доплера,
- для каждой пары приемной и передающей антенн многочастотной системы формируют опорные символы всех многочастотных символов фрейма, осуществляя интерполяцию частотного отклика канала во временном направлении для поднесущих, в которых присутствуют пилот-символы передающей антенны, путем взвешенного суммирования значений частотных откликов канала пилот-символов поднесущей с весами, определяемыми оценкой автоковариационной функции частотного отклика канала многочастотной системы во временном направлении, относительным расположением пилот-символов поднесущей, относительным расположением интерполируемого символа и пилот-символов поднесущей, а также предполагаемым отношением сигнал - шум,
- для каждого фрейма оценивают профиль многолучевости многочастотной системы, используя опорные символы,
для чего
- для каждой пары приемной и передающей антенн, для каждого многочастотного символа по опорным символам этого многочастотного символа формируют доступные отсчеты автокорреляционной функции частотного отклика канала в частотном направлении, которые определяются взаимным расположением опорных символов,
- находят доступные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, усредняя сформированные доступные отсчеты автокорреляционной функции частотного отклика канала в частотном направлении по всем многочастотным символам всех пар приемной и передающей антенн,
- интерполируют отсутствующие отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, используя доступные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- объединяют доступные и интерполированные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- корректируют объединенные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении, умножая эти отсчеты на коэффициенты сглаживающего окна,
- формируют предварительную оценку профиля многолучевости многочастотной системы текущего фрейма, выполняя дискретное преобразование Фурье скорректированных отсчетов автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении,
- формируют оценку профиля многолучевости многочастотной системы текущего фрейма, осуществляя взвешенное суммирование предварительной оценки профиля многолучевости многочастотной системы текущего фрейма и оценки профиля многолучевости многочастотной системы предыдущего фрейма,
- осуществляют выбор тех элементов оценки профиля многолучевости многочастотной системы текущего фрейма, которые превышают заданный порог,
- для каждой пары приемной и передающей антенн многочастотной системы для всех многочастотных символов фрейма осуществляют интерполяцию частотного отклика канала в частотном направлении путем взвешенного суммирования значений частотных откликов канала опорных символов многочастотного символа с весами, определяемыми выбранными элементами оценки профиля многолучевости многочастотной системы текущего фрейма и позициями этих элементов, относительным расположением опорных символов, относительным расположением интерполируемого символа и опорных символов, а также предполагаемым отношением сигнал - шум, в результате получая окончательную оценку канала многочастотной системы, которую в дальнейшем используют при демодуляции информационных символов.
Причем значения частотных откликов канала, соответствующих пилот-символам фрейма каждой из передающих антенн, получают формируя отношения корреляционных откликов соответствующих пилот-символов фрейма к априори известным значениям этих символов.
Оценку круговой частоты Доплера вычисляют по формуле, основанной на аппроксимации функции Бесселя ломаной линией.
Оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении определяют, подставляя оценку круговой частоты Доплера в функцию Бесселя нулевого порядка первого рода.
Предполагается, что для каждой приемной антенны выполнены процедуры фильтрации входного сигнала, его усиления, переноса на видеочастоту, аналого-цифрового преобразования, частотно-временной синхронизации.
Заявляемый способ оценки канала в многочастотных системах радиосвязи с КT передающими и КR приемными антеннами осуществляют с помощью устройства, структурная схема которого приведена на фиг.4.
Предполагается, что для каждой приемной антенны выполнены процедуры фильтрации входного сигнала, его усиления, переноса на видеочастоту, аналого-цифрового преобразования, частотно-временной синхронизации, например, как приведено в книге Nee R. Prasad R., OFDM for Wireless Multimedia Communication, London: «Artech House», 2000 [7].
Устройство на фиг.4 работает следующим образом.
На входы устройства, а именно на первые и вторые входы блоков формирования корреляционных откликов пилот-символов каждой приемной антенны 1.1÷1.КR поступают синфазные и квадратурные составляющие входного цифрового комплексного сигнала соответствующей приемной антенны. На третьи управляющие входы блоков 1.1÷1.КR поступает импульсный сигнал синхронизации, импульсы которого (сигналы равные логической единице) соответствуют моментам времени окончания очередного многочастотного символа фрейма. По сигналу окончания очередного многочастотного символа фрейма блоки формирования корреляционных откликов пилот-символов каждой приемной антенны 1.1÷1.КR формируют на своих выходах синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-символов соответствующей приемной антенны. Обозначим  - комплексный корреляционных отклик пилот-символа, переданного j-й антенной и принятого i-й антенной, на n-й поднесущей k-го многочастотного символа текущего фрейма. Синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-символов j-й передающей антенны и i-й приемной антенны с j-го выхода блока формирования корреляционных откликов пилот-символов i-ой приемной антенны поступают на первый вход блока оценки канала j-й передающей антенны и i-й приемной антенны 2.j.i, а именно на первый вход узла 3 формирования частотных откликов канала пилот-символов этого блока.
- комплексный корреляционных отклик пилот-символа, переданного j-й антенной и принятого i-й антенной, на n-й поднесущей k-го многочастотного символа текущего фрейма. Синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-символов j-й передающей антенны и i-й приемной антенны с j-го выхода блока формирования корреляционных откликов пилот-символов i-ой приемной антенны поступают на первый вход блока оценки канала j-й передающей антенны и i-й приемной антенны 2.j.i, а именно на первый вход узла 3 формирования частотных откликов канала пилот-символов этого блока.
Значения комплексных частотных откликов канала (синфазные и квадратурные составляющие) формируются путем известной процедуры комплексного деления комплексных корреляционных откликов пилот-символов на априори известные значения этих символов в соответствии со следующим выражением:

где  обозначает априори известное значение пилот-символа переданного j-й антенной на n-й поднесущей k-го многочастотного символа.
обозначает априори известное значение пилот-символа переданного j-й антенной на n-й поднесущей k-го многочастотного символа.
Синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов  j-й передающей антенны и i-й приемной антенны с выхода узла 3 блока 2.1.1 оценки канала j-й передающей антенны и i-й приемной антенны 2.j.i поступают на первый вход узла 5 интерполяции во временном направлении блока 2.j.i. Выход узла 3 также является первым выходом блока 2.j.i. оценки канала. Первые выходы блоков 2.1.1÷2.КT.КR оценки канала всех передающих и приемных антенн соединены с соответствующими 1÷КTКR входами блока 6 оценки статистики канала во временном направлении. Блок 6 оценки статистики канала во временном направлении формирует на своем выходе отсчеты оценки автоковариационной функции частотного отклика канала многочастотной системы во временном направлении Кq,
j-й передающей антенны и i-й приемной антенны с выхода узла 3 блока 2.1.1 оценки канала j-й передающей антенны и i-й приемной антенны 2.j.i поступают на первый вход узла 5 интерполяции во временном направлении блока 2.j.i. Выход узла 3 также является первым выходом блока 2.j.i. оценки канала. Первые выходы блоков 2.1.1÷2.КT.КR оценки канала всех передающих и приемных антенн соединены с соответствующими 1÷КTКR входами блока 6 оценки статистики канала во временном направлении. Блок 6 оценки статистики канала во временном направлении формирует на своем выходе отсчеты оценки автоковариационной функции частотного отклика канала многочастотной системы во временном направлении Кq,  которые поступают на вторые входы всех блоков 2.1.1÷2.КT.КR оценки канала, а именно на вторые входы узлов 5 интерполяции во временном направлении этих блоков.
которые поступают на вторые входы всех блоков 2.1.1÷2.КT.КR оценки канала, а именно на вторые входы узлов 5 интерполяции во временном направлении этих блоков.
Узел 5 интерполяции во временном направлении формирует опорные символы, осуществляя интерполяцию частотного отклика канала во временном направлении. Синфазные и квадратурные составляющие комплексных опорных символов j-й передающей антенны и i-й приемной антенны с выхода узла 5 блока оценки канала j-й передающей антенны и i-й приемной антенны 2.j.i поступают на первый вход узла 4 интерполяции в частотном направлении блока 2.j.i. Выход узла 5 также является вторым выходом блока 2.j.i оценки канала. Вторые выходы блоков 2.1.1÷2.КT.КR оценки канала всех передающих и приемных антенн соединены с соответствующими входами 1÷КTКR блока 7 оценки статистики канала в частотном направлении. Блок 7 оценки статистики канала в частотном направлении формирует на своем выходе выбранные элементы оценки профиля многолучевости многочастотной системы текущего фрейма и их позиции, которые поступают на третьи входы всех блоков 2.1.1÷2.KT.KR оценки канала, а именно на вторые входы узлов 4 интерполяции в частотном направлении этих блоков.
Узел 4 интерполяции в частотном направлении блока 2.j.i оценки канала j-й передающей антенны и i-й приемной антенны осуществляет интерполяцию частотного отклика канала в частотном направлении для всех многочастотных символов фрейма, формируя на своем выходе окончательную оценку канала j-й передающей антенны и i-й приемной антенны.
Выходы узлов 4 интерполяции в частотном направлении блоков 2.1.1÷2.КT.КR оценки канала одновременно являются третьими выходами соответствующих блоков 2 оценки канала и выходом устройства, на котором формируются окончательные оценки канала многочастотной системы.
Блок 1.i формирования корреляционных откликов пилот-символов, i-й приемной антенны может быть выполнен, например, как показано на Фиг.5.
Работает блок 1.i следующим образом.
Синфазные и квадратурные составляющие входного цифрового комплексного сигнала i-й приемной антенны поступают на первый и второй входы блока формирования корреляционных откликов пилот-символов i-й приемной антенны 1.i, а именно на первый и второй входы узла 8 регистров. Узел 8 представляет собой два последовательно-параллельных регистра, в которых запоминаются блоки соответственно синфазной и квадратурной составляющих отсчетов входного цифрового комплексного сигнала, соответствующего текущему многочастотному символу. Запомненные значения с выходов узла 8 регистров поступают на входы узла 9 комплексного БПФ, где посредством выполнения известной процедуры быстрого преобразования Фурье над комплексными значениями по сигналу окончания очередного многочастотного символа фрейма, приходящего на управляющий вход узла 9, формируются комплексные корреляционные отклики символов. Синфазные и квадратурные составляющие комплексных корреляционных откликов символов с выходов узла 9 поступают на сигнальные входы узлов коммутации каждой передающей антенны 11.1÷11.КT, на вторые входы которых поступает сигнал номера текущего многочастотного символа с выхода счетчика 10 многочастотных символов. Счетчик 10 многочастотных символов накапливает импульсы, соответствующие моментам времени окончания очередного многочастотного символа фрейма, которые поступают на его вход.
Узел 11.j коммутации j-ой передающей антенны осуществляет коммутацию таким образом, чтобы на его выходах формировались синфазные и квадратурные составляющие комплексных корреляционных откликов пилот-символов только j-ой передающей антенны, положения которых однозначно определяется номером многочастотного символа фрейма.
Выходы узлов 11.1÷11.КT коммутации являются соответственно 1÷КT выходами блока формирования корреляционных откликов пилот-символов.
Блок 6 оценки статистики канала во временном направлении может быть выполнен, например, как показано на фиг.6. Известно, что время жизни лучей и, соответственно, профиля многолучевости (˜ sec.) существенно превосходит длительность фрейма (не более 20 мс). Поэтому на интервале нескольких фреймов статистика канала может считаться стационарной.
Блок 6 работает следующим образом.
Синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов поступают на соответствующие входы узлов 13.1.1.1÷13.NP.KT.KR формирования отсчетов автокорреляционной функции и на соответствующие входы узла 12 усреднения значений частотных откликов канала пилот-символов. При этом синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов j-й передающей антенны и i-й приемной антенны n-й поднесущей, в которой присутствуют пилот-символы  поступают на входы синфазной и квадратурной составляющих узлов 13.n.j.i формирования отсчетов автокорреляционной функции и на ij-й вход узла 12 усреднения значений частотных откликов канала пилот-символов. В узле 12 усредняют комплексные частотные отклики канала пилот-символов по всем передающим и приемным антеннам и поднесущим, в которых имеются пилот-символы, формируя среднее значение частотных откликов канала пилот-символов фрейма
поступают на входы синфазной и квадратурной составляющих узлов 13.n.j.i формирования отсчетов автокорреляционной функции и на ij-й вход узла 12 усреднения значений частотных откликов канала пилот-символов. В узле 12 усредняют комплексные частотные отклики канала пилот-символов по всем передающим и приемным антеннам и поднесущим, в которых имеются пилот-символы, формируя среднее значение частотных откликов канала пилот-символов фрейма

Синфазная и квадратурная составляющие среднего значения частотных откликов канала пилот-символов фрейма m поступает соответственно на первый и второй входы узла 18 расчета квадрата модуля среднего значения, где формируется сумма квадратов синфазной и квадратурной составляющих среднего значения частотных откликов канала пилот символов фрейма.
В узле 13.n.j.i формирования отсчетов автокорреляционной функции формируют Q отсчетов автокорреляционной функции частотного отклика канала во временном направлении n-й поднесущей j-й передающей и i-й приемной антенны.
Обозначим Р - количество пилот-символов одного фрейма n-й поднесущей. Временное расстояние между соседними пилот символами - Δ. Объединим значения комплексной огибающей пилот-символов n-й поднесущей в вектор ZP,  Тогда в узле 13.n.j.i формирования отсчетов автокорреляционной функции формируют отсчеты автокорреляционной функции канала в соответствии со следующим выражением:
Тогда в узле 13.n.j.i формирования отсчетов автокорреляционной функции формируют отсчеты автокорреляционной функции канала в соответствии со следующим выражением:

С выходов узлов 13.1.1.1-13.NPKT.КR формирования отсчетов автокорреляционной функции отсчеты автокорреляционной функции канала во временном направлении каждой поднесущей каждой пары передающей и приемной антенн поступают на входы узла 14 усреднения автокорреляционной функции, где соответствующие отсчеты автокорреляционной функции усредняют. С выхода узла 14 усреднения автокорреляционной функции отсчеты усредненной автокорреляционной функции <Кq>,  поступают на первые входы узла 15 вычитания, на второй вход которого поступает квадрат модуля среднего значения частотных откликов канала пилот-символов фрейма
поступают на первые входы узла 15 вычитания, на второй вход которого поступает квадрат модуля среднего значения частотных откликов канала пилот-символов фрейма  с выхода узла 18 расчета квадрата модуля среднего значения. В узле 15 вычитания формируют отсчеты автоковариационной функции частотного отклика канала во временном направлении многочастотной системы
с выхода узла 18 расчета квадрата модуля среднего значения. В узле 15 вычитания формируют отсчеты автоковариационной функции частотного отклика канала во временном направлении многочастотной системы

Отсчеты автоковариационной функции частотного отклика канала во временном направлении многочастотной системы с выхода узла 15 вычитания поступают на вход узла 16 расчета круговой частоты Доплера. Процедура оценки частоты Доплера основана на аппроксимации функции Бесселя ломаной линией. Точность аппроксимации иллюстрируется на фиг.7.
1. Для каждого отсчета автоковариационной функции (10) канала из интервала [-0.30÷0.93] вычисляют оценку круговой частоты Доплера по формуле
где параметры α,β определяют аппроксимацию функции Бесселя ломаной линией и представлены в Табл.1.

2. Оценку круговой частоты Доплера многочастотной системы получают, усредняя (11) по всем значениям ωq

Оценка круговой частоты Доплера многочастотной системы с выхода узла 16 расчета круговой частоты Доплера поступает на вход узла 17 расчета оценки автоковариационной функции частотного отклика во временном направлении, где подставляя оценку (12) в функцию Бесселя, получают оценку автоковариационной функции частотного отклика во временном направлении произвольного аргумента

где Т - длительность многочастотного символа.
Оценка автоковариационной функции (13) частотного отклика во временном направлении является выходным сигналом узла 17 и блока 6 оценки статистики канала во временном направлении.
Узел 5 интерполяции во временном направлении может быть выполнен, например, как показано на фиг.8 и работает следующим образом.
Синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов j-й передающей антенны и i-й приемной антенны поступают на первый вход узла 5 интерполяции во временном направлении, а именно на входы соответствующих линий 19.1.1÷19.NР.1, 19.1.2÷19.NР.2 задержки. При этом синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов j-й передающей антенны и i-й приемной антенны n-й поднесущей поступают на первые входы соответственно линий 19.n.1 и 19.n.2 задержки, где они задерживаются на время, необходимое для получения оценки автоковариационной функции частотного отклика во временном направлении в блоке оценки 6 статистики канала во временном направлении. Задержанные синфазные и квадратурные составляющие комплексных частотных откликов канала пилот-символов с выходов линий 19.1.1÷19.NP.1, 19.1.2÷19.NP.2 задержки поступают на первые входы соответствующих трансверсальных фильтров 20.1.1÷20.NP.1, 20.1.2÷20.NP.2, на вторые входы которых поступают весовые коэффициенты с выхода элемента 21 расчета весовых коэффициентов. Весовые коэффициенты зависят от взаимного расположения пилот-символов поднесущих.
Для примера рассмотрим режим 4-х передающих и 4-х приемных антенн стандарта IEEE 802.16d. В соответствии с этим стандартом для каждой передающей антенны расстояние между пилот-символами в частотном направлении составляет 12 поднесущих, а во временном направлении - 4 многочастотных символа. Кроме того, в сигнале каждой передающей антенны в каждом втором многочастотном символе имеются пилот-символы, неэквидистантно расположенные в частотном направлении. Заметим, что в одном многочастотном символе пилот-символы разных передающих антенн расположены на различных поднесущих, причем информационные и пилот-символы многочастотной системы также не перекрываются. Таким образом, пилот-символы всех каналов системы (образованных всевозможными парами приемной и передающей антенн) не подвергаются воздействию межканальных помех.
Пусть l означает расстояние от интерполируемого символа до ближайшего задержанного пилот символа поднесущей. Возможны четыре варианта: l=0; 1; 2; 3. Расстояние до ближайшего опережающего пилот-символа равно (4-l). Тогда вектор опорных пилот символов поднесущей Z можно записать в виде

Обозначим V - вектор кросскорреляции, определяемый расстояниями между интерполируемым символом и опорными пилот-символами, Q - автокорреляционная матрица используемых пилот-символов, определяемая расстояниями между пилот-символами. При выборной размерности векторов Z, V, равной 12,


 - символ Кронекера, SNR=2(3dB) - предполагаемое отношение сигнал-шум. Значение SNR не является ключевым параметром для точности интерполяции. Следовательно, SNR не оценивают и задают его приблизительно равным рабочему значению.
- символ Кронекера, SNR=2(3dB) - предполагаемое отношение сигнал-шум. Значение SNR не является ключевым параметром для точности интерполяции. Следовательно, SNR не оценивают и задают его приблизительно равным рабочему значению.
Произведение VQ-1 представляет собой весовые коэффициенты, которые рассчитываются в элементе 21 расчета весовых коэффициентов. Необходимые для этого расчета отсчеты автоковариационной функции частотного отклика во временном направлении  q=0, 1, 2, ... поступают на вход элемента 21 с блока 6 оценки статистики канала во временном направлении.
q=0, 1, 2, ... поступают на вход элемента 21 с блока 6 оценки статистики канала во временном направлении.
В трансверсальных фильтрах 20 осуществляется интерполяция синфазной (квадратурной) составляющей частотного отклика канала во временном направлении для поднесущих, в которых присутствуют пилот символы. Интерполяция во временном направлении может быть представлена в виде

где Uk - результат интерполяции k-го многочастотного символа (опорного символа для частотной интерполяции) рассматриваемой поднесущей. Результаты интерполяции в трансверсальных фильтрах 20 представляют собой синфазные и квадратурные составляющие опорных символов, которые являются выходными сигналами узла 5 интерполяции во временном направлении.
Блок 7 оценки статистики канала в частотном направлении может быть выполнен, например, как показано на фиг.9, и работает следующим образом.
Комплексные опорные символы поступают на входы блока 7 оценки статистики канала в частотном направлении, а именно на соответствующие входы узлов 22.1.1÷22.КT.КR формирования доступных отсчетов автокорреляционной функции в частотном направлении. При этом комплексные опорные символы всех поднесущих j-й передающей антенны и i-й приемной антенны поступают на первый вход узла 22.j.i формирования доступных отсчетов автокорреляционной функции в частотном направлении. Рассмотрим произвольный многочастотный символ j-й передающей антенны и i-й приемной антенны. Количество опорных символов в многочастотном символе равно Np. В соответствии со структурой пилот-сигнала IEEE 802.16е опорные символы расположены неэквидистантно. Обозначим эти комплексные опорные символы как
где τp - частотная позиция р-го опорного символа.
Для режима 4 передающих и 4 приемных антенн IEEE 802.16е в узле 22 формирования доступных отсчетов автокорреляционной функции в частотном направлении формируют отсчеты автокорреляционной функции канала в частотном направлении

где q=0, 1, 3, 4, 5, 7, 8, 9, 11, 12, ..., J, J=240, Δƒ - разница частот соседних поднесущих, <·> - обозначает усреднение по всем опорным символам многочастотного символа. Под термином «доступные отсчеты» понимают отсчеты, которые могут быть непосредственно рассчитаны по формуле (19) с учетом структуры пилот-сигнала.
Сформированные в узлах 22.1.1÷22.КT.КR доступные отсчеты автокорреляционной функции канала в частотном направлении поступают на входы узла 23 усреднения доступных отсчетов автокорреляционной функции в частотном направлении, в котором усредняют соответствующие доступные отсчеты по всем многочастотным символам всех пар приемной и передающей антенн. Полученные доступные отсчеты автокорреляционной функции канала многочастотной системы в частотном направлении поступают на вход узла 24 интерполяции отсутствующих отсчетов автокорреляционной функции в частотном направлении, где отсутствующие отсчеты q=2, 6, 10, 14, ..., 238 получают методом кубической интерполяции

В узле 24 интерполяции отсутствующие отсчеты автокорреляционной функции в частотном направлении также объединяют доступные и интерполированные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении. После объединения отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении Rq, поступают на вход узла 25 коррекции отсчетов автокорреляционной функции.
поступают на вход узла 25 коррекции отсчетов автокорреляционной функции.
Для оценки профиля многолучевости требуется полное дискретное преобразование Фурье вектора отсчетов автокорреляционной функции канала в частотном направлении. Однако согласно структуре пилот-символа мы не располагаем всеми требуемыми отсчетами. Таким образом, при оценке профиля многолучевости появляются ошибки. Для уменьшения этих ошибок используется сглаживающее весовое окно, коэффициенты которого равны

где а=0.6.
В узле 25 коррекции отсчетов автокорреляционной функции умножают входные отсчеты автокорреляционной функции канала в частотном направлении на коэффициенты сглаживающего весового окна RqWq,  . Скорректированные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении с выхода узла 25 поступают на вход узла 26 формирования предварительной оценки профиля многолучевости, где производится следующая операция:
. Скорректированные отсчеты автокорреляционной функции частотного отклика канала многочастотной системы в частотном направлении с выхода узла 25 поступают на вход узла 26 формирования предварительной оценки профиля многолучевости, где производится следующая операция:

где, например, NCP=128
Сформированная предварительная оценка профиля многолучевости многочастотной системы текущего фрейма с выхода узла 26 поступает на вход узла 27 оценки профиля многолучевости, где осуществляется взвешенное суммирование

где j - номер текущего фрейма, γ= 0.2 - параметр старения. Значение γ может выбираться и другим способом. Полученная оценка профиля многолучевости многочастотной системы текущего фрейма с выхода узла 27 поступает на вход узла 28 выбора элементов оценки профиля многолучевости, где производится выбор элементов  превысивших порог. Для этого элементы
превысивших порог. Для этого элементы  располагаются в порядке убывания. В результате получается новый массив
располагаются в порядке убывания. В результате получается новый массив  . Затем производится выбор элементов согласно правилу
. Затем производится выбор элементов согласно правилу

где u - порог. Максимальный элемент  выбирают всегда. Значения mk определяют задержки лучей (позиции элементов), а значения
выбирают всегда. Значения mk определяют задержки лучей (позиции элементов), а значения  - относительные мощности лучей. Пусть m ={m1, ... mM} означает вектор оценок задержек лучей,
- относительные мощности лучей. Пусть m ={m1, ... mM} означает вектор оценок задержек лучей,  - вектор оценок относительных мощностей лучей, М - количество выбранных элементов. Данные векторы являются выходными сигналами узла 28 выбора элементов оценки профиля многолучевости и блока 7 оценки статистики канала в частотном направлении.
- вектор оценок относительных мощностей лучей, М - количество выбранных элементов. Данные векторы являются выходными сигналами узла 28 выбора элементов оценки профиля многолучевости и блока 7 оценки статистики канала в частотном направлении.
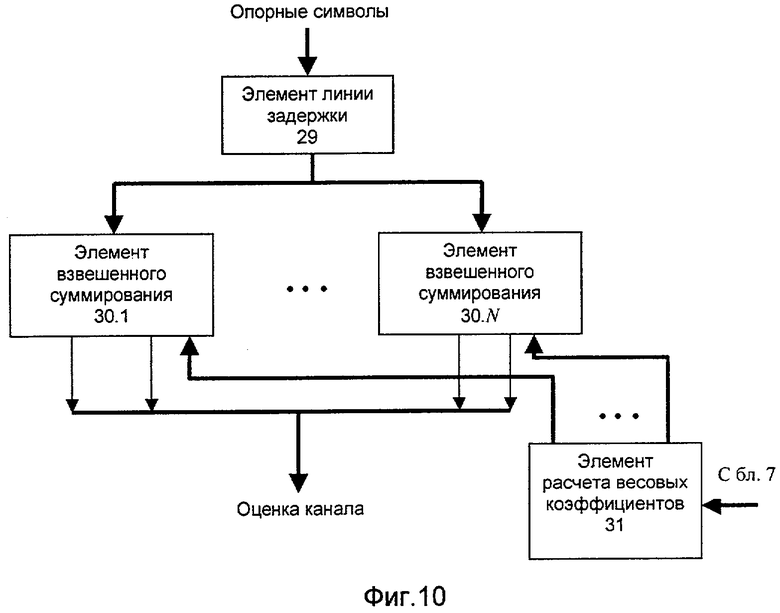
Узел 4 интерполяции в частотном направлении может быть выполнен, например, как показано на фиг.10, и работает следующим образом.
Комплексные опорные символы поступают на вход узла 4 интерполяции в частотном направлении, а именно на вход элемента 29 линии задержки, где они задерживаются на время, необходимое для получения оценки статистики канала в частотном направлении в блоке 7. Задержанные комплексные опорные символы всех поднесущих поступают на входы элементов 30.1÷30.N взвешенного суммирования. n-й элемент 30.n взвешенного суммирования интерполирует значение комплексного частотного отклика канала n-й поднесущей последовательно для всех многочастотных символов фрейма путем взвешенного суммирования задержанных комплексных опорных символов всех поднесущих многочастотного символа.
Интерполяция в частотном направлении для всех поднесущих может быть записана следующим образом

где  - вектор частотного отклика канала текущего многочастотного символа. Его размерность равна N, U - вектор опорных символов с известными позициями in,
- вектор частотного отклика канала текущего многочастотного символа. Его размерность равна N, U - вектор опорных символов с известными позициями in, 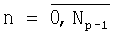 текущего многочастотного символа, В - матрица с элементами
текущего многочастотного символа, В - матрица с элементами

G - матрица с элементами

D - диагональная матрица, определяемая выбранными элементами оценки профиля многолучевости многочастотной системы текущего фрейма и позициями этих элементов

g=108, SNRF=10dB - предполагаемое отношение сигнал - шум,

Матрица G(D+BHB)-1BH весовых коэффициентов рассчитывается в элементе 31 расчета весовых коэффициентов по выбранным элементам оценки профиля многолучевости многочастотной системы текущего фрейма и позициям этих элементов, поступающим на вход элемента 31, заранее известным относительным расположением опорных символов, относительным расположением интерполируемого символа и опорных символов, а также предполагаемым отношением сигнал - шум. n-я строка матрицы G(D+BHB)-1BH представляет собой набор весовых коэффициентов интерполяции для n-й поднесущей многочастотного символа и поступает с n-го выхода элемента 31 расчета весовых коэффициентов на второй вход элемента 30.n взвешенного суммирования. Выходные сигналы элементов 30.1÷30.N взвешенного суммирования представляют собой окончательную оценку канала j-й передающей антенны и i-й приемной антенны.
На фиг.11 показаны зависимости PER (вероятности пакетной ошибки) от отношения энергии бита к спектральной плотности мощности шума Еd/N0, полученные методом статистического моделирования MIMO-OFDM системы связи с 4 передающими и 4 приемными антеннами при использовании предлагаемого способа оценки канала, способа прототипа (кривая «2×1D интерполяция») и байесовским методом (кривая «алгоритм MMSE»). При моделировании скорость движения абонента выбиралась V=250 км/ч, длина канала L=92 отсчета. Очевидно, что предлагаемый способ оценки канала значительно превосходит альтернативные алгоритмы оценки канала.

Изобретение относится к области радиотехники, в частности к способам оценки канала в многочастотных системах радиосвязи с несколькими передающими и приемными антеннами. Технический результат состоит в повышении точности оценки канала в многочастотных системах радиосвязи с несколькими передающими и приемными антеннами для произвольных, в том числе длинных импульсных откликов канала, при произвольных, в том числе высоких скоростях движения мобильного абонента. Для этого сначала выполняют интерполяцию во временном направлении, а затем в частотном. Поэтому увеличивается число опорных символов и соответственно качество интерполяции в частотном направлении, что наиболее важно для длинных каналов. Для интерполяции в частотном и временном направлениях используют оценку автоковариационной функции частотного отклика канала многочастотной системы во временном направлении и оценку профиля многолучевости многочастотной системы. 3 з.п. ф-лы, 11 ил., 1 табл.
| M.SANDELL & O.EDFORS | |||
| A comparative study of pilot-based channel estimators for wireless OFDM | |||
| Div | |||
| Signal Processing | |||
| Lulea Univ | |||
| Technology | |||
| Lulea, Sweden, Res | |||
| Rep | |||
| TULEA, 19.09.1996 | |||
| СПОСОБ КОГЕРЕНТНОЙ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛА | 2001 |
|
RU2192094C1 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5805648 A, 08.09.1998. | |||

