Настоящее изобретение касается медицинского манипулятора для использования, например, в лапароскопической хирургии.
В последние годы лапароскопической хирургии для удаления аппендикса и желчного пузыря без вскрытия брюшной полости уделяют большее внимание, чем абдоминальной хирургии. В процессе лапароскопического вмешательства через брюшную стенку в брюшную полость обычно вводят, например, четыре троакара для проведения контроля брюшной полости с помощью небольшой камеры, введенной через один из троакаров, и для манипулирования щипцами, ножницами, электрохирургическим ножом и т.д., введенными через другие троакары для проведения хирургической операции на пораженной части брюшной полости.
Заявитель предлагает хирургический инструмент (медицинский манипулятор) для использования в такой лапароскопической хирургии. Предложенный хирургический инструмент содержит удлиненное тело инструмента, а также концевой участок, который может поворачиваться относительно удлиненного тела инструмента для придания медицинскому рабочему блоку на концевом участке требуемого пространственного положения при удерживании медицинского рабочего блока вблизи участка тела, подвергаемого хирургическому вмешательству. Подробности можно найти в патенте Японии № 3421117.
Медицинский манипулятор должен позволить хирургу быстро выполнить различные соответствующие технические приемы в зависимости от положения и размера пораженной части для удаления, наложения швов и завязывания узла на пораженной части. Согласно выложенным японским патентным публикациям №№ 2002-102248 и 2004-301275 предложены медицинские манипуляторы, с которыми легко обращаться и которые обладают высокой степенью подвижности.
Медицинский манипулятор, раскрытый в патенте Японии № 3421117, например, позволяет хирургу управлять вращательным звеном-манипулятором для непосредственного вращения медицинского рабочего блока на концевом участке. Желательно, чтобы с медицинским манипулятором было легче работать, для того чтобы быстро выполнить различные соответствующие технические приемы в зависимости от положения и размера пораженной части.
Общая задача настоящего изобретения заключается в создании медицинского манипулятора, которым было бы легче управлять.
По одному варианту осуществления настоящего изобретения обеспечивается медицинский манипулятор, содержащий рабочий блок дистального конца, включающий в себя конечное исполнительное звено, функциональный блок для управления рабочим блоком дистального конца, соединительное звено, осуществляющее взаимосвязь между рабочим блоком дистального конца и функциональным блоком, а также механизм изменения пространственного положения для изменения пространственного положения рабочего блока дистального конца, при этом конечное исполнительное звено механически управляется передающим звеном, когда хирург управляет функциональным блоком, а механизм изменения пространственного положения управляется приводным механизмом, управление которым осуществляется тогда, когда хирург управляет функциональным блоком.
При вышеописанной конструкции конечное исполнительное звено раскрыто, закрыто, повернуто или как-то иначе механически управляется вручную хирургом, а пространственное положение рабочего блока дистального конца изменяется приводным механизмом, который управляет механизмом изменения пространственного положения. Таким образом, в то время как конечным исполнительным звеном можно легко и надежно управлять для обработки пораженной области с требуемыми усилиями захвата, приводной механизм может быстро и легко изменить пространственное положение конечного исполнительного звена. Функциональные возможности медицинского манипулятора, таким образом, могут быть расширены. Другими словами, медицинским манипулятором можно легко управлять для раскрытия, закрытия, поворота конечного исполнительного звена или иного управления конечным исполнительным звеном, а также изменять пространственное положение рабочего блока дистального конца, посредством чего функциональные возможности медицинского манипулятора возрастают.
Механизм изменения пространственного положения может содержать механизм сгибания для сгибания участка соединения, а также механизм вращения для поворота рабочего блока дистального конца вокруг оси. Механизм вращения способен поворачивать рабочий блок дистального конца вокруг отклоненной оси, когда рабочий блок дистального конца отклонен от параллели с осью соединительного звена механизмом сгибания.
Если соединительное звено разъемным образом установлено на функциональном блоке, то рабочий блок дистального конца, в зависимости от вида конечного исполнительного звена, может быть заменен на единственном функциональном блоке. Кроме того, соединительное звено и рабочий блок дистального конца могут пройти стерилизацию при высокой температуре. Медицинский манипулятор, таким образом, может обладать повышенной эксплуатационной адаптируемостью и технологичностью.
Если функциональный блок включает в себя рукоятку, которая способна совершать угловые перемещения под действием хирурга для возвратно-поступательного перемещения передающего звена, то функциональные возможности медицинского манипулятора по раскрыванию и закрыванию конечного исполнительного звена возрастают.
Передающее звено может включать в себя гибкое звено и цилиндрическое звено, вокруг которого намотано гибкое звено. Цилиндрическое звено, вокруг которого намотано гибкое звено, обеспечивает простую и легковесную конструкцию, обеспечивающую изменение пространственного положения механизма изменения пространственного положения так, чтобы не затрагивать состояние конечного исполнительного звена.
Механизм изменения пространственного положения может включать в себя вращательный вал, содержащий цилиндрическое звено, а передающее звено может включать в себя гибкое звено, участок которого намотан вокруг цилиндрического звена, посредством чего передающее звено управляет конечным исполнительным звеном через гибкое звено. Гибкое звено, намотанное вокруг цилиндрического звена, обеспечивает простую и легковесную конструкцию для приведения в действие конечного исполнительного звена через гибкое звено, а также для изменения пространственного положения механизма изменения пространственного положения так, чтобы не затрагивать состояние конечного исполнительного звена, используя цилиндрическое звено в качестве вращательного вала.
Вышеуказанные и другие задачи, признаки и преимущества настоящего изобретения станут более ясными из последующего описания со ссылками на прилагаемые чертежи, где на иллюстративном примере показаны предпочтительные варианты осуществления настоящего изобретения.
На Фигуре 1 показан вид сбоку общей конструкции медицинского манипулятора по одному варианту осуществления настоящего изобретения;
на Фигуре 2 показан увеличенный вид сбоку, частично в сечении, дистального концевого участка медицинского манипулятора, показанного на Фигуре 1;
на Фигуре 3 показан увеличенный вид сбоку, частично в сечении, дистального концевого участка, когда захватное приспособление раскрыто из положения, показанного на Фигуре 2;
на Фигуре 4 показан увеличенный вид сбоку, частично в сечении, функционального блока медицинского манипулятора, показанного на Фигуре 1;
на Фигуре 5 показан увеличенный вид сбоку, частично в сечении, функционального блока, когда захватное приспособление раскрыто из положения, показанного на Фигуре 4;
на Фигуре 6 показан вид в сечении по линии VI-VI на Фигуре 2;
на Фигуре 7 показан вид в сечении по линии VII-VII на Фигуре 5;
на Фигуре 8 показан вид спереди, частично вне чертежа, при рассмотрении в направлении по стрелке VIII на Фигуре 4;
на Фигуре 9 показан покомпонентный вид в перспективе, представляющий пример конструкции механизма сгибания, предназначенного для сгибания искривляемого участка соединительного звена;
на Фигуре 10 показан покомпонентный вид в перспективе, представляющий участок конструкционного примера искривляемого участка соединительного звена;
на Фигуре 11 показан вид сбоку медицинского манипулятора, представленного на Фигуре 1, который разделен на соединительном звене;
на Фигуре 12 показан вид в перспективе линейного тела передающего звена, которое отделено на соединительном элементе;
на Фигуре 13 показан вид сбоку, представляющий другой пример конструкции медицинского манипулятора, показанного на Фигуре 1;
на Фигуре 14 показан увеличенный вид сбоку, частично в сечении, представляющий другой пример конструкции участка дистального конца медицинского манипулятора, показанного на Фигуре 1;
на Фигуре 15 показан вид сбоку медицинского манипулятора по другому варианту осуществления настоящего изобретения;
на Фигуре 16 показан вид в плане медицинского манипулятора, представленного на Фигуре 15;
на Фигуре 17 показан вид сбоку в сечении рабочего блока дистального конца согласно первому примеру конструкции;
на Фигуре 18 показан вид в плане в сечении рабочего блока дистального конца согласно первому примеру конструкции;
на Фигуре 19 показан вид сбоку в сечении рабочего блока дистального конца согласно первому примеру конструкции, когда захватное приспособление закрыто;
на Фигуре 20 показан покомпонентный вид в перспективе рабочего блока дистального конца согласно первому примеру конструкции;
на Фигуре 21 показан схематичный вид конструкции рабочего блока дистального конца согласно первому примеру конструкции;
на Фигуре 22 показан схематичный вид сбоку рабочего блока дистального конца согласно первому примеру конструкции, когда спусковой рычаг пребывает в нерабочем состоянии;
на Фигуре 23 показан схематичный вид сбоку рабочего блока дистального конца согласно первому примеру конструкции, когда спусковой рычаг полностью отжат;
на Фигуре 24 показан схематичный вид сбоку рабочего блока дистального конца согласно первому примеру конструкции, когда спусковой рычаг отжат в промежуточное положение;
на Фигуре 25 показан схематичный вид сбоку рабочего блока дистального конца согласно первому примеру конструкции, когда ось ротации работает в одном направлении;
на Фигуре 26 показан схематичный вид присоединенного участка конца пассивной проволоки согласно первой модификации;
на Фигуре 27 показан схематичный вид присоединенного участка конца пассивной проволоки согласно второй модификации;
на Фигуре 28 показан схематичный вид в плане присоединенного участка конца пассивной проволоки согласно третьей модификации;
на Фигуре 29 показан схематичный вид сбоку в сечении присоединенного участка конца пассивной проволоки согласно третьей модификации;
на Фигуре 30 показан схематичный вид в плане в сечении присоединенного участка конца пассивной проволоки согласно четвертой модификации;
на Фигуре 31 показан схематичный вид сбоку в сечении присоединенного участка конца пассивной проволоки согласно четвертой модификации;
на Фигуре 32 показан схематичный вид конструкции рабочего блока дистального конца согласно второму примеру конструкции;
на Фигуре 33 показан вид сбоку в сечении рабочего блока дистального конца согласно третьему примеру конструкции;
на Фигуре 34 показан вид сбоку в сечении рабочего блока дистального конца согласно третьему примеру конструкции, когда захватное приспособление закрыто;
на Фигуре 35 показан схематичный вид сбоку рабочего блока дистального конца согласно третьему примеру конструкции, когда ось ротации работает в одном направлении;
на Фигуре 36 показан схематичный вид сбоку рабочего блока дистального конца согласно четвертому примеру конструкции, когда спусковой рычаг вытолкнут;
на Фигуре 37 показан схематичный вид сбоку рабочего блока дистального конца согласно четвертому примеру конструкции, когда спусковой рычаг полностью отжат;
на Фигуре 38 показан схематичный вид конструкции рабочего блока дистального конца согласно четвертому примеру конструкции;
на Фигуре 39 показан увеличенный вид в перспективе холостого шкива и направляющего шкива рабочего блока дистального конца согласно четвертому примеру конструкции;
на Фигуре 40 показан схематичный вид механизма подачи и возврата приводного звена согласно первому примеру;
на Фигуре 41 показан схематичный вид механизма подачи и возврата приводного звена согласно второму примеру;
на Фигуре 42 показан схематичный вид механизма подачи и возврата приводного звена согласно третьему примеру;
на Фигуре 43 показан схематичный вид механизма подачи и возврата приводного звена согласно четвертому примеру;
на Фигуре 44 показан вид сбоку в сечении рабочего блока дистального конца согласно пятому примеру конструкции;
на Фигуре 45 показан вид в сечении в плане рабочего блока дистального конца согласно пятому примеру конструкции;
на Фигуре 46 показан вид сбоку в сечении рабочего блока дистального конца согласно пятому примеру конструкции, когда захватное приспособление закрыто;
на Фигуре 47 показан покомпонентный вид в перспективе рабочего блока дистального конца согласно пятому примеру конструкции;
на Фигуре 48 показан вид в плане, частично в сечении, второго механизма привода конечного исполнительного звена, когда спусковой рычаг вытолкнут;
на Фигуре 49 показан вид в плане, частично в сечении, второго механизма привода конечного исполнительного звена, когда спусковой рычаг полностью отжат;
на Фигуре 50 показан вид сбоку, частично в сечении, второго механизма привода конечного исполнительного звена, когда спусковой рычаг вытолкнут;
на Фигуре 51 показан схематичный вид конструкции рабочего блока дистального конца согласно пятому примеру конструкции;
на Фигуре 52 показан схематичный вид сбоку рабочего блока дистального конца согласно пятому примеру конструкции, когда спусковой рычаг полностью отжат;
на Фигуре 53 показан схематичный вид сбоку рабочего блока дистального конца согласно пятому примеру конструкции, когда спусковой рычаг вытолкнут;
на Фигуре 54 показан вид сбоку в сечении рабочего блока дистального конца согласно первой модификации пятого примера конструкции;
на Фигуре 55 показан вид сбоку в сечении рабочего блока дистального конца согласно второй модификации пятого примера конструкции;
на Фигуре 56А показан схематичный вид сбоку в сечении рабочего блока дистального конца, причем его участок соединения с захватным приспособлением на чертеже отсутствует;
на Фигуре 56В показан схематичный вид сбоку в сечении рабочего блока дистального конца, причем его участок соединения с захватным приспособлением на чертеже отсутствует, а захватное приспособление раскрыто; а также
на Фигуре 57 показан схематичный вид в перспективе роботизированной хирургической системы, где рабочий блок присоединен к дистальному концу роботизированной руки.
Предпочтительные варианты осуществления медицинских манипуляторов по настоящему изобретению будут подробно описаны ниже со ссылкой на прилагаемые чертежи.
На Фигуре 1 показан вид сбоку общей конструкции медицинского манипулятора 10 по одному варианту осуществления настоящего изобретения. Согласно настоящему варианту осуществления медицинский манипулятор 10 будет описан как манипулятор для использования в качестве щипцов, применяемых главным образом в лапароскопической хирургии. Однако настоящее изобретение применимо для различных хирургических инструментов, таких, например, как пинцеты и электрические электрохирургические ножи, а не только щипцы. В последующем описании правый конец медицинского манипулятора 10, показанного на Фигуре 1, будет называться проксимальным концом, а левый конец - дистальным концом, как и на других фигурах.
Медицинский манипулятор 10 содержит рабочий блок 14 дистального конца, имеющий захватное приспособление 22 на своем дистальном конце в качестве конечного исполнительного звена для выполнения хирургической операции на пораженной части, рабочий блок 15 (основное тело манипулятора), включающий в себя удлиненное соединительное звено 12 малого диаметра, соединенное с проксимальным концом рабочего блока 14 дистального конца, функциональный блок 16, соединенный с проксимальным концом соединительного звена 12, а также удлиненное передающее звено 18 (см. Фигуру 2), продолжающееся через соединительное звено 12 и соединяющее рабочий блок 14 дистального конца и функциональный блок 16 друг с другом. Управляющее устройство 20, служащее блоком управления для приведения в действие и управления различными исполнительными механизмами, размещенными в медицинском манипуляторе 10, соединено с функциональным блоком 16.
На Фигуре 2 показан увеличенный вид сбоку, частично в сечении, рабочего блока 14 дистального конца медицинского манипулятора 10, показанного на Фигуре 1, представляющий состояние, при котором захватное приспособление 22 на рабочем блоке 14 дистального конца закрыто. На Фигуре 3 показан увеличенный вид сбоку, частично в сечении, когда захватное приспособление 22 раскрыто из положения, показанного на Фигуре 2. На Фигуре 4 показан увеличенный вид сбоку, частично в сечении, функционального блока 16 медицинского манипулятора, показанного на Фигуре 1, представляющий состояние, при котором захватное приспособление 22 на рабочем блоке 14 дистального конца закрыто. На Фигуре 5 показан увеличенный вид сбоку, частично в сечении, когда захватное приспособление 22 раскрыто из положения, показанного на Фигуре 4.
Соединительное звено 12 содержит полое удлиненное звено малого диаметра, обладающее пространством 24, образованным в нем, в котором размещается передающее звено 18 и пр. Соединение (механизм изменения пространственного положения, механизм вращения) 26, присоединенное с возможностью вращения к рабочему блоку 14 дистального конца, расположено на дистальном конце соединительного звена 12 (см. Фигуры 1 и 2). Соединительное звено 12 имеет проксимальный конец, соединенный с основным телом 28 функционального блока функционального блока 16 (см. Фигуры 1 и 4).
Соединительное звено 12 имеет поперечное сечение (форму поперечного сечения, перпендикулярного аксиальному направлению этого звена), которое может иметь форму круга, форму эллипса, форму многоугольника и т.п., и не ограничено какой-то определенной формой. В настоящем варианте осуществления, как показано на Фигуре 6, соединительное звено 12 имеет круглое поперечное сечение с наружным диаметром, позволяющим ввести соединительное звено в троакар (не показан), например, в диапазоне от 5 до 10 мм.
В настоящем варианте осуществления соединительное звено 12 имеет прямую форму, как показано на Фигуре 1, но соединительное звено 12 может быть криволинейным или изогнутым с приданием любой требуемой формы. Соединительное звено 12 имеет, по меньшей мере, один искривляемый участок 30 (механизм изменения пространственного положения, механизм сгибания), которому может быть придана кривизна (изгиб) требуемой формы (см. Фигуру 1) для расширения пределов, в которых живая ткань может быть подвергнута хирургическому вмешательству с использованием захватного приспособления 22, и чтобы можно было выполнить оперативное лечение в соответствующем пространственном положении.
Передающее звено 18, которое продолжается через соединительное звено 12, содержит линейное тело 32, первое соединительное звено 34, соединенное с проксимальным концом линейного тела 32, а также второе соединительное звено 36 в форме стержня, соединенное с дистальным концом линейного тела 32. Линейное тело 32 имеет соединительный элемент 37 (см. Фигуры 4 и 12), расположенный вблизи разъемного соединения 35, посредством которого соединительное звено 12 и функциональный блок 16 разъемным образом соединены друг с другом. Соединительный элемент 37 позволяет участку 32а дистального конца и участку 32b проксимального конца разъемным образом присоединяться друг к другу. Участок 32а дистального конца продолжается в рабочий блок 14 дистального конца, а участок 32b проксимального конца продолжается в основное тело 28 функционального блока (см. Фигуры 2 и 4).
Линейное тело 32 предпочтительно должно быть гибким (поддающимся изгибу) по всей его длине или на некотором его участке, по меньшей мере, на участке, соответствующем искривляемому участку 30. Линейное тело 32 может содержать проволоки, такие как металлические проволоки, выполненные из нержавеющей стали, вольфрама, сверхупругого сплава и т.п., рояльные проволоки, тросы, цепи и т.п., либо волокна, выполненные из полимерного материала, способные выдерживать относительно высокие нагрузки на растяжение, такие как полиамидные (чисто ароматический полиамид), полиэфирные, из полиэтилена сверхвысокой молекулярной массы, углеродные волокна (далее будем называть волокнами с высокой прочностью на растяжение), либо пучок из любых таких проволок, либо другие композиции. Прямолинейный участок, отличный от участка, соответствующего искривляемому участку 30, может содержать жесткое, не поддающееся изгибу тело. Линейное тело 32, выполненное в форме пучка проволок, предпочтительно должно быть выполнено из одной или нескольких проволок (в особенности металлических проволок), имея одну или несколько проволок с одинаковыми или различными типами намотки вокруг проволок (например, со спиральной намоткой), а также одну или несколько проволок с одинаковыми или различными типами намотки в направлении, противоположном направлению намотки вышеупомянутых одной или нескольких проволок. Линейное тело такой конструкции предпочтительно в том отношении, что отлично отслеживает натяжение функциональным блоком 16 и при этом устраняет изменение длины (дисторцию) вследствие скручивания и изгибания при вращении линейного тела 32. Внешний диаметр линейного тела 32 не ограничен какой-то определенной величиной, но предпочтительно может быть в диапазоне от около 1,0 до 2,5 мм, в частности от около 1,0 до 1,5 мм, согласно настоящему варианту осуществления.
Как показано на Фигурах 2 и 6, второе соединительное звено 36 имеет поперечное сечение квадратной формы. Соединение 26 включает в себя выступ 38, имеющий проход 40, выполненный в нем по центру. Второе соединительное звено 36 вводится со скольжением в проход 40. Форма поперечного сечения прохода 40 по существу идентична форме поперечного сечения второго соединительного звена 36. Второе соединительное звено 36 имеет участок дистального конца, продолжающийся в рабочий блок 14 дистального конца и соединенный или образующий единое целое с проксимальным концом скользящего элемента 44, который будет описан далее.
Поперечное сечение второго соединительного звена 36 может быть некруглой формы, например треугольной формы, шестиугольной формы, полукруглой формы, прямолинейной формы, крестообразной формы, L-образной формы и т.п., вместо квадратной формы, чтобы избежать вращения второго соединительного звена 36 относительно прохода 40. Второе соединительное звено 36 может быть выполнено из металлического материала, такого как алюминий, медь, нержавеющая сталь, вольфрам, углеродистая сталь, сверхупругий сплав и т.п., или из относительно твердого полимера, такого как поликарбонат, полиэтилен, полипропилен, твердый поливинилхлорид, полиэфир и т.п., или из волокон с высокой прочностью на растяжение, описанных выше.
Как показано на Фигурах 2 и 3, рабочий блок 14 дистального конца включает в себя захватное приспособление 22 в качестве конечного исполнительного звена для обработки пораженной части, а также цилиндрическую пружину 46 для смещения скользящего элемента 44 с целью перемещения в одном направлении (по направлению к дистальному концу). Захватное приспособление 22 служит механизмом щипцов для захвата живой ткани и включает в себя пару раскрываемых/закрываемых звеньев, одно из которых может перемещаться, т.е. фиксированное зажимающее звено 48 и подвижное зажимающее звено 50, способное совершать угловое перемещение относительно фиксированного зажимающего звена 48. Подвижное зажимающее звено 50 имеет проксимальный конец, установленный с возможностью углового перемещения на основном теле 54 дистального конца с помощью пальца 52. Хотя у захватного приспособления 22 может раскрываться лишь одно из его зажимающих звеньев в настоящем варианте осуществления, обладать возможностью раскрытия также могут оба его зажимающих звена.
Основное тело 54 дистального конца имеет выемку 56, образованную на нижнем его участке (т.е. на нижнем участке, как показано на Фигуре 2). Скользящий элемент 44 расположен в выемке 56, так чтобы он мог скользить в продольном направлении рабочего блока 14 дистального конца. Скользящий элемент 44 имеет палец 58, выступающий на его дистальном конце, введенный в удлиненное отверстие 60, образованное на нижнем участке проксимального конца подвижного зажимающего звена 50.
Когда блок 62 рукоятки, который будет описан ниже, срабатывает на натяжение передающего звена 18 в направлении проксимального конца так, чтобы расположить скользящий элемент 44 на участке проксимального конца выемки 56, фиксированное зажимающее звено 48 и подвижное зажимающее звено 50 находятся в закрытом положении (см. Фигуру 2). Когда усилие сжатия на блоке 62 рукоятки снижается или снимается, передающее звено 18 перемещается в направлении дистального конца, перемещая тем самым скользящий элемент 44 в направлении дистального конца выемки 56. Палец 58 поджимается к внутренней периферийной поверхности удлиненного отверстия 60, поворачивая подвижное зажимающее звено 50 вокруг пальца 52 и раскрывая его (см. Фигуру 3). Можно обойтись без удлиненного отверстия 60, при этом по мере перемещения скользящего элемента 44 скользящий элемент 44 может деформироваться с поглощением вертикального перемещения пальца 58 на Фигуре 2.
Цилиндрическая пружина 46 размещена в сжатом состоянии в пределах выемки 64, образованной в основном теле 54 дистального конца, а также выемки 66, образованной в скользящем элементе 44. Цилиндрическая пружина 46 содержит средство смещения для смещения скользящего элемента 44 в направлении дистального конца под действием ее упругой силы, т.е. для смещения подвижного зажимающего звена 50 в направлении раскрытия. Поскольку медицинский манипулятор 10 по настоящему варианту осуществления включает в себя цилиндрическую пружину 46 в качестве средства смещения в рабочем блоке 14 дистального конца, нет необходимости в обеспечении пластинчатой пружины или схожего элемента, например, внутри блока 62 рукоятки для смещения подвижной рукоятки 68 в направлении раскрытия. Таким образом, функциональный блок 16 имеет простую конструкцию, повышая удобство управления.
Как показано на Фигурах 2 и 3, соединение 26 включает в себя выемку 70, имеющую круглое поперечное сечение, которая сообщается с пространством 24 в соединительном звене 12 и которая открыта на дистальном торце соединительного звена 12. Выступ 38 имеет круглое поперечное сечение, выступает из проксимального конца основного тела 54 дистального конца и вводится в выемку 70.
Выступ 38 включает в себя проход 40, образованный по центральной оси выступа и имеющий поперечное сечение, форма которого по существу идентична форме поперечного сечения второго соединительного звена 36. Когда второе соединительное звено 36 введено в проход 40, вращающее усилие передающего звена 18 может быть передано выступу 38 и основному телу 54 дистального конца.
На внутренней окружной поверхности выемки 70 образованы две кольцеобразные канавки 74, аксиально разнесенные друг от друга на заданное расстояние. Выступ 38 имеет два кольцеобразных контактных участка 75, продолжающихся по окружности в соответствующих положениях, согласующихся с канавками 74. Контактные участки 75 введены соответственно в канавки 74. Контактные участки 75 не обязательно должны иметь форму непрерывного кольца, но могут располагаться с перерывами в окружном направлении.
Соединение 26 вышеуказанной конструкции позволяет рабочему блоку 14 дистального конца вращаться (совершать поворот) относительно соединительного звена 12, но не позволяет рабочему блоку 14 дистального конца перемещаться аксиально. Таким образом, соединение 26 надежно препятствует тому, чтобы рабочий блок 14 дистального конца мог сместиться или испытал раскачивание. Соединение 26 может располагать средством снижения сопротивления вращению (не показано) для снижения сопротивления вращению рабочего блока 14 дистального конца. Согласно конкретному примеру средство снижения сопротивления вращению может содержать смазку, такую как смазочное масло, или слой материала с низким коэффициентом трения, такого как политетрафторэтилен, силикон, полиэтилен, полиацеталь и т.п., помещенные между выемкой 70 и выступом 38. Средство снижения сопротивления вращению обеспечивает более плавное вращение рабочего блока 14 дистального конца.
Как показано на Фигурах 1, 4 и 5, функциональный блок 16 установлен на проксимальном конце соединительного звена 12 для дистанционного раскрывания и закрывания (поворачивания) захватного приспособления 22, сгибания рабочего блока 14 дистального конца на искривляемом участке 30, а также вращения рабочего блока 14 дистального конца относительно соединительного звена 12.
Функциональный блок 16 включает в себя блок 62 рукоятки, который содержит зафиксированную рукоятку 80, закрепленную на основном теле 28 функционального блока или образующую с ним единое целое, а также подвижную рукоятку 68, которая может быть разведена или сведена (повернута) относительно зафиксированной рукоятки 80. Верхний конец подвижной рукоятки 68 установлен с возможностью углового перемещения на основном теле 28 функционального блока с помощью осевого звена 82.
Стопор 84 выступает из наружной поверхности нижнего участка основного тела 28 функционального блока для зацепления с подвижной рукояткой 68 для ограничения диапазона ее углового перемещения, что исключает поломку передающего звена 18 при приложении к блоку 62 рукоятки избыточного сжимающего усилия. Как показано на Фигуре 13, зафиксированную рукоятку 80 и подвижную рукоятку 68 можно поменять местами. Согласно такой модификации блок 86 ввода по вращению и блок 128 ввода по сгибанию, которые будут описаны далее, могут быть размещены на верхнем участке проксимального конца основного тела 28 функционального блока для повышения удобства управления.
Функциональный блок 16 имеет механизм 88 приведения во вращение, расположенный на проксимальном конце основного тела 28 функционального блока, который может приводиться в действие путем задействования дискообразного блока 86 ввода по вращению (см. Фигуру 8), установленного на зафиксированной рукоятке 80.
Механизм 88 приведения во вращение содержит источник вращения (привод) 90, например, такой как двигатель, ведущее зубчатое колесо 92 малого диаметра, соединенное с вращательным валом привода 90 вращения, ведомое зубчатое колесо 94 большого диаметра, удерживаемое в зацеплении с ведущим зубчатым колесом 92, а также подшипниковая опора 96, с помощью которой ведомое зубчатое колесо 94 поддерживается с возможностью вращения на проксимальном конце основного тела 28 функционального блока. На привод 90 вращения подается питание под контролем управляющего устройства 20 на основе работы блока 86 ввода по вращению. Ведомое зубчатое колесо 94 имеет вращательный вал 98, содержащий цилиндрический участок 98а на своем проксимальном концевом участке, а также призматический участок 98b на своем дистальном концевом участке. Цилиндрический участок 98а поддерживается подшипниковой опорой 96.
Основное тело 28 функционального блока вмещает в себя средство 100 преобразования для преобразования углового перемещения подвижной рукоятки 68 в продольное перемещение передающего звена 18, а также для передачи вращательного усилия, создаваемого вращением ведомого зубчатого колеса 94, передающему звену 18. Средство 100 преобразования содержит опорный элемент 102, с помощью которого первое соединительное звено 34 поддерживается с возможностью вращения, а также механизм 104 передачи вращательного усилия для передачи вращательного усилия от ведомого зубчатого колеса 94 на первое соединительное звено 34.
Участок 32b проксимального конца линейного тела 32 крепится к дистальному концевому участку первого соединительного звена 34 посредством пальца 106. Первое соединительное звено 34 содержит полое цилиндрическое звено, имеющее проход 108 квадратного поперечного сечения, образованный по центру звена (см. Фигуру 7), в который вводится призматический участок 98b вращательного вала 98 ведомого зубчатого колеса 94. Первое соединительное звено 34 включает в себя фланец 110 на своем проксимальном конце, который входит в зацепление с проксимальной торцевой поверхностью опорного элемента 102.
Опорный элемент 102 имеет сквозное отверстие 112 круглого поперечного сечения, образованное в нем, в которое вводится первое соединительное звено 34. Из нижнего участка опорного элемента 102 выступает язычок 116, в котором образовано удлиненное отверстие 114. Опорный элемент 102 поддерживается направляющими звеньями 118, 120, расположенными в основном теле 28 функционального блока, чтобы создать возможность перемещения со скольжением в продольном направлении передающему звену 18. Язычок 116 выступает вниз через щель 122, образованную в нижнем направляющем звене 120.
Подвижная рукоятка 68 имеет выступающее звено 124 на своем верхнем участке, которое вводится в основное тело 28 функционального блока. Палец 126, установленный на верхнем конце выступающего звена 124, вводится в удлиненное отверстие 114 язычка 116 (см. Фигуры 4 и 7).
Механизм 104 передачи вращательного усилия образован призматическим участком 98b вращательного вала 98 ведомого зубчатого колеса 94 совместно с проходом 108, в который введен призматический участок 98b. Призматический участок 98b может аксиально перемещаться относительно прохода 108, но не может вращаться относительно прохода 108, вне зависимости от глубины, на которую призматический участок 98b введен в проход 108. Таким образом, вращательное усилие от ведомого зубчатого колеса 94 передается через призматический участок 98b и проход 108 на первое соединительное звено 34, что приводит к вращению целиком всего передающего звена 18.
Поперечное сечение призматического участка 98b может быть некруглой формы, например треугольной формы, шестиугольной формы, полукруглой формы, прямолинейной формы, крестообразной формы, L-образной формы и т.п., вместо квадратной формы, чтобы избежать вращения призматического участка 98b относительно прохода 108. Механизм 104 передачи вращательного усилия содержит механизм для механической передачи вращательного усилия от привода 90 вращения на передающее звено 18. Механизм 104 передачи вращательного усилия может приводиться в действие проволокой, цепью, зубчатым ремнем, звеном, стержнем, зубчатым колесом и т.п. Предпочтительно механизм 104 передачи вращательного усилия приводится в действие механической составляющей в форме твердого тела, неупругого в направлении передачи мощности. Хотя проволока, цепь и т.п. неизбежно незначительно вытягиваются в условиях растяжения, тем не менее, они рассматриваются как механические составляющие в форме неупругого твердого тела. Приводные механизмы могут быть использованы для обеспечения вращения механизма 88 приведения во вращение и рабочего блока 14 дистального конца в противоположных направлениях или с разными скоростями.
Функциональный блок 16 имеет механизм 130 сгибания, расположенный на дистальном конце основного тела 28 функционального блока, который может приводиться в действие срабатыванием блока 128 ввода по сгибанию для сгибания искривляемого участка 30. Блок 128 ввода по сгибанию установлен на зафиксированной рукоятке 80 и содержит четыре треугольные кнопки, указывающие в направлении вверх, вниз (вперед, назад), влево, вправо.
Как показано на Фигурах 4, 5 и 9, механизм 130 сгибания содержит две цилиндрические пружины 132, 134, выступающие из дистального торца основного тела 28 функционального блока, вращательную ось (шарик подшипника) 136, расположенную параллельно цилиндрическим пружинам 132, 134, наклонную пластину (качающуюся пластину) 138, соединенную с дистальными концами цилиндрических пружин 132, 134, разнесенную с дистальным торцом основного тела 28 функционального блока на заданное расстояние и противостоящую ему. Наклонная пластина 138 имеет отверстие 138а, образованное по центру этой пластины, через которое вводится выступ 139 по существу полой цилиндрической формы, который выступает на дистальном конце основного тела 28 функционального блока и который соединен с соединительным звеном 12.
Механизм 130 сгибания также включает в себя два источника действия сгибания (приводы) 140, 142, расположенные в основном теле 28 функционального блока, содержащие, например, редукторные двигатели. Приводы 140, 142 сгибания имеют соответствующие приводные валы с соответствующими аксиально подвижными винтами 140а, 142а, соединенными с этими валами. Аксиально подвижные винты 140а, 142а заходят по резьбе соответственно в резьбовые отверстия 144, 146, образованные на дистальном конце основного тела 28 функционального блока, и их дистальные концы упираются соответственно в опорные поверхности 148, 150 в диагонально противоположенных углах наклонной пластины 138.
Механизм 130 сгибания работает следующим образом. Когда на приводы 140, 142 сгибания подается питание под контролем управляющего устройства 20, аксиально подвижные винты 140а, 142а аксиально перемещаются так, чтобы наклонить наклонную пластину 138 на требуемый угол в требуемом направлении (направления указаны стрелками А, В на Фигуре 9) вокруг сферической поверхности дистального конца вращательной оси 136, которая при этом упруго поддерживается цилиндрическим пружинам 132, 134. Поскольку одна опорная поверхность 150 удлинена по горизонтали, то даже когда наклонная пластина 138 находится в наклонном состоянии, аксиально подвижный винт 142а надежно удерживается в упор с опорной поверхностью 150 и наклонная пластина 138 может совершать плавное качание, в то время как другой аксиально подвижный винт 140а удерживается в упор с опорной поверхностью 148. Наклонная пластина 138 механизма 130 сгибания может наклоняться с использованием механизма, который включает в себя общую конструкцию для качания оптического зеркала.
Отверстие 138а наклонной пластины 138 включает в себя четыре щели 152, образованные в верхнем, нижнем, левом и правом направлениях этой пластины, как показано на чертеже. От внутреннего окружного участка отверстия 138а в соответствующие щели 152 введены проволоки 154. Проволоки 154 имеют участки 154а увеличенного диаметра на соответствующих своих проксимальных концах, которые входят в зацепление с проксимальной торцевой поверхностью наклонной пластины 138. Проволоки 154 проходят через четыре соответствующих сквозных отверстия 156, образованных аксиально в соединительном звене 12, и продолжаются до искривляемого участка 30.
На Фигуре 10 показан покомпонентный вид в перспективе, представляющий участок конструкционного примера искривляемого участка 30 соединительного звена 12. Искривляемый участок 30 содержит множество узловых колец 158, которые соединены между собой и могут совершать угловые перемещения относительно друг друга. На Фигуре 10 приведено описание искривляемого участка 30, который содержит, например, три узловых кольца 158. Однако искривляемый участок 30 не обязательно составлен тремя узловыми кольцами 158, но может содержать от четырех до тридцати узловых колец 158.
Каждое из узловых колец 158 включает в себя пару V-образных пазов 160, образованных на одной из поверхностей, расположенных диаметрально противоположно друг другу относительно центра узлового кольца 158, а также пару полуцилиндрических выступов 162, расположенных на другой поверхности, диаметрально противоположных друг другу относительно центра узлового кольца 158. Полуцилиндрические выступы 162 имеют угловое смещение на 90° относительно пазов 160. Два смежных узловых кольца 158 ориентированы так, что их пазы 160 имеют угловое смещение относительно друг друга на 90°. Узловые кольца 158 соединены таким образом, что выступы 162 одного из узловых колец 158 вводятся в соответствующие пазы 160 другого узлового кольца 158.
Каждое из узловых колец 158 имеет сквозные отверстия 164, образованные в пазах 160 и на выступах 162. Четыре проволоки 154, участки 154а увеличенного диаметра которых входят в зацепление с наклонной пластиной 138, введены через соответствующие сквозные отверстия 164 узловых колец 158. Соответствующие дистальные концы проволок 154 соединены с узловым кольцом 158, расположенным на дистальном конце искривляемого участка 30 (см. Фигуры 2 и 3). Таким образом, узловые кольца 158 помещены вместе и объединены по существу целиком друг с другом.
Когда выступы 162 вводятся в пазы 160, между двумя смежными узловыми кольцами 158 образуется зазор, что позволяет выступам 162 совершать угловое перемещение в пределах пазов 160 и дополнительно позволяет смежным узловым кольцам 158 совершать угловое перемещение относительно друг друга. Несмотря на то что угол, на который смежная пара узловых колец 158 может совершить угловое перемещение, мал, сумма углов множества смежных пар узловых колец 158 достаточно велика, чтобы позволить всему искривляемому участку 30 совершить изгиб на требуемый угол (например, на угол в диапазоне от 60 до 120°), что дает возможность отклонить рабочий блок 14 дистального конца (захватное приспособление 22) так, чтобы он стал непараллелен продольной оси соединительного звена 12.
При срабатывании блока 128 ввода по сгибанию механизм 130 сгибания приводится в действие под контролем управляющего устройства 20 для наклона наклонной пластины 138 на требуемый угол и для аксиального перемещения проволок 154 на соответствующее расстояние для того, чтобы тем самым изогнуть искривляемый участок 30 вверх, вниз (вперед, назад), влево и вправо на требуемые углы в плоскости поперечного сечения соединительного звена 12. А именно, искривляемый участок 30 активно изгибается или искривляется при натягивании с помощью наклонной пластины 138 посредством проволок 154. Направления, в которых искривляемый участок 30 изгибается, а также число таких направлений (степень свободы) никак не ограничиваются. Хотя и не показано, наружная окружная поверхность каждого узлового кольца 158 может быть покрыта слоем, выполненным из упругого или гибкого материала.
Искривляемый участок 30 не обязательно должен иметь указанную конструкцию, но может содержать сильфонную трубку или гибкую трубку. Соединительное звено 12 может содержать жесткую трубку, служащую дистальным концевым участком, совместно с жесткой трубкой, служащей проксимальным концевым участком, при этом жесткие трубки соединены с возможностью угловых перемещений единой осью или множеством осей для сгибания искривляемого участка 30. По альтернативному варианту искривляемый участок 30 может содержать механизм сгибания, обладающий шарнирной осью.
Как показано на Фигуре 11, в медицинском манипуляторе 10, согласно настоящему варианту осуществления, функциональный блок 16 и соединительное звено 12 разъемно соединены (с возможностью отделения) друг с другом посредством разъемного соединения 35. А именно, в разъемном соединении 35, посредством которого соединительное звено 12 и функциональный блок 16 разъемно соединены друг с другом, выступ 139, который выступает на дистальном конце функционального блока 16, вводится в отверстие 166, образованное на проксимальном конце соединительного звена 12, и установочный винт 168 поджимается к выступу 139 от внешней окружной поверхности в направлении внутренней окружной поверхности соединительного звена 12, скрепляя тем самым соединительное звено 12 и функциональный блок 16 между собой (см. Фигуры 4 и 5).
Таким образом, для того чтобы отделить соединительное звено 12 и функциональный блок 16 друг от друга, проволоки 154 освобождаются из щелей 152 наклонной пластины 138, установочный винт 168 ослабляется и выступ 139 функционального блока 16 вытягивается из отверстия 166 соединительного звена 12 (см. Фигуру 11). На этом этапе линейное тело 32 может быть легко разделено, когда участок 32а дистального конца и участок 32b проксимального конца отделяются друг от друга на соединительном элементе 37, путем освобождения Т-образной балки 170 на дистальном конце участка 32а дистального конца из Т-образного захвата 172, обеспеченного на дистальном конце участка 32b проксимального конца (см. Фигуру 12). Соответственно, различные рабочие блоки 15 с рабочими блоками дистального конца, имеющими различные конечные исполнительные звенья, могут легко заменяться и использоваться на одном функциональном блоке 16, так что медицинский манипулятор 10 обладает повышенной универсальностью, а его стоимость невысока. Поскольку рабочий блок 15 может легко отделяться от функционального блока 16, рабочий блок 15 (рабочий блок 14 дистального конца) может легко обслуживаться, обеспечивая возможность его замены, очистки и/или высокотемпературной стерилизации.
При такой конструкции медицинского манипулятора 10, когда захватное приспособление 22 управляется (раскрывается, закрывается или совершает угловой поворот), а рабочий блок 14 дистального конца поворачивается одним единственным передающим звеном 18, установочное пространство передающего звена 18 в пределах соединительного звена 12 может быть небольшим. Соответственно, соединительное звено 12 может быть более тонким, в то время как рабочий блок 14 дистального конца и функциональный блок 16 могут иметь упрощенную конструкцию. Следовательно, медицинский манипулятор 10 по настоящему варианту осуществления может быть должным образом использован для выполнения лапароскопических операций, операций на головном мозге, торакоскопических вмешательств, урологических операций и т.п.
Ниже будет описана работа медицинского манипулятора 10.
В начальном состоянии (нерабочем состоянии) захватное приспособление 22 раскрыто под смещающим воздействием цилиндрической пружины 46, а подвижная рукоятка 68 отодвинута (см. Фигуры 1, 3 и 5). Когда хирург захватывает рукой блок 62 рукоятки и поворачивает подвижную рукоятку 68 по направлению, обозначенному стрелкой на Фигуре 1, выступающее звено 124 поворачивается по часовой стрелке вокруг осевого звена 82, заставляя, таким образом, палец 126 прижаться к внутренней периферийной поверхности проксимального конца удлиненного отверстия 114 для того, чтобы переместить язычок 116 и опорное звено 102 вдоль направляющих звеньев 118, 120 (состояние, показанное на Фигуре 4). Поскольку фланец 110 входит в зацепление с проксимальным концом опорного звена 102, первое соединительное звено 34 перемещается в том же направлении, что и опорное звено 102, тем самым оттягивая передающее звено 18 в направлении проксимального конца. Так как опорное звено 102 перемещается в направлении проксимального конца, дистальный конец призматического участка 98b вводится относительно глубоко в проход 108.
При оттягивании передающего звена 18 в направлении проксимального конца скользящий элемент 44 перемещается в пределах выемки 56 в направлении ее проксимального конца, противодействуя смещению цилиндрической пружины 46. Таким образом, палец 58 поджимается к внутренней периферийной поверхности проксимального конца удлиненного отверстия 60, тем самым поворачивая подвижное зажимающее звено 50 против часовой стрелки на Фигуре 2 вокруг пальца 52 и, следовательно, закрывая подвижное зажимающее звено 50 (состояние, показанное на Фигуре 2).
Когда хирург убирает руку с блока 62 рукоятки или снижает усилие захвата на блоке 62 рукоятки, скользящий элемент 44 перемещается в пределах выемки 56 в направлении ее дистального конца под смещающим воздействием цилиндрической пружины 46. Таким образом, палец 58 поджимается к внутренней периферийной поверхности дистального конца удлиненного отверстия 60, поворачивая подвижное зажимающее звено 50 по часовой стрелке на Фигуре 3 вокруг пальца 52 и, следовательно, раскрывая подвижное зажимающее звено 50 (состояние, показанное на Фигуре 3).
По мере того как скользящий элемент 44 перемещается в направлении дистального конца, передающее звено 18 также перемещается в том же направлении. На проксимальном конце передающего звена 18 фланец 110 оказывает давление на опорное звено 102, тем самым перемещая опорное звено 102 и язычок 116 в направлении дистального конца вдоль направляющих звеньев 118, 120. Внутренняя периферийная поверхность проксимального конца удлиненного отверстия 114 поджимается к пальцу 126, поворачивая выступающее звено 124 и подвижную рукоятку 68 по часовой стрелке на Фигуре 5 вокруг осевого звена 82. Подвижная рукоятка 68 теперь возвращается в свое исходное отодвинутое состояние (состояние, показанное на Фигуре 5). По мере того как опорное звено 102 перемещается в направлении дистального конца, дистальный конец призматического участка 98b перемещается практически к центру прохода 108 вдоль его продольного направления.
Подвижное зажимающее звено 50 находится в раскрытом или закрытом состоянии в механической (непосредственной) связи с подвижной рукояткой 68, когда та отодвинута или придвинута. Таким образом, если захватное приспособление 22 захватывает объект (хирургический инструмент или живую ткань), когда подвижная рукоятка 68 вручную подтянута на определенную величину, то захватное приспособление 22 и скользящий элемент 44 не могут далее перемещаться, так что хирург может почувствовать кончиками пальцев, что объект захвачен.
Если объект представляет собой твердый предмет, такой как хирургический инструмент, то подвижная рукоятка 68 более совершенно не может перемещаться в направлении закрытия. Хирург почувствует, что захвачен твердый объект и может надежно зажать объект со значительным усилием, поскольку хирург имеет возможность передать ручное усилие механически и непосредственно на захватное приспособление 22, а не через электромагнитное средство. Если бы захватное усилие, эквивалентное ручному усилию, генерировалось двигателем, то двигатель должен был быть достаточно большим по размеру и тяжелым, и такой двигатель нельзя было бы с готовностью поместить в основное тело 28 функционального блока, при этом медицинский манипулятор 10 стал бы более тяжелым.
Если объект представляет собой мягкий предмет, такой как живая ткань или нечто подобное, то подвижная рукоятка 68 может быть незначительно смещена в направлении смыкания, в зависимости от упругих характеристик объекта. Таким образом, хирург почувствует, что захвачен мягкий объект, при этом осознает, насколько этот объект мягок, и сможет отрегулировать усилие, с которым объект захватывается.
Когда передающее звено 18 или подобное ему изношено или подверглось деградации, трение возрастает и передается на подвижную рукоятку 68, позволяя хирургу почувствовать изменение состояния или распознать ненормальное состояние системы привода, и, следовательно, хирург может принять решение о времени технического обслуживания более точно.
Как описано выше, поскольку подвижное зажимающее звено 50 находится в раскрытом или закрытом состоянии в механической (непосредственной) связи с подвижной рукояткой 68, когда та отодвинута или придвинута, раскрывающее (захватывающее) усилие зафиксированного зажимающего звена 48 и подвижного зажимающего звена 50 соответствует раскрывающему (захватывающему) усилию зафиксированной рукоятки 80 и подвижной рукоятки 68. Таким образом, хирург может легко управлять захватным приспособлением 22 с любым требуемым раскрывающим (захватывающим) усилием.
А именно, ручное управление подвижной рукояткой 68 механически передается так, чтобы раскрыть или закрыть захватное приспособление 22. Передающее звено 18, скользящий элемент 44 и пр. обеспечивают блок передачи управления, служащий средством механической передачи ручного управления между подвижной рукояткой 68 и захватным приспособлением 22.
Термин «механически», используемый в настоящем описании, относится к системе для передачи ручного управления через проволоку, цепь, зубчатый ремень, звено, стержень, зубчатое колесо и т.п., которая приводится в действие главным образом механической составляющей в форме неупругого твердого тела в направлении передачи мощности, как говорилось выше. Хотя проволока, цепь и т.п. неизбежно незначительно вытягиваются в условиях растяжения, тем не менее, они рассматриваются как механические составляющие в форме неупругого твердого тела. Например, хотя передающее звено 18 имеет гибкий участок, соответствующий, по меньшей мере, искривляемому участку 30, передающее звено 18 находится в условиях соответствующего растяжения, создаваемого цилиндрической пружиной 46. Когда захватное приспособление 22 закрыто, передающее звено 18 натягивается в направлении функционального блока 16 посредством подвижной рукоятки 68, при этом передающее звено 18 по существу упруго не деформируется или неизбежно упруго деформируется только в той степени, которая не представляет опасности при работе, обеспечивая тем самым средство механического соединения (средство механической передачи).
Когда срабатывает блок 86 ввода по вращению с целью запуска привода 90 вращения для вращения ведомого зубчатого колеса 94, вне зависимости от того, раскрыто или закрыто подвижное зажимающее звено 50 (вне зависимости от степени его раскрытия), вращающее усилие передается последовательно на призматический участок 98b вращательного вала 98, проход 108, первое соединительное звено 34, линейное тело 32, второе соединительное звено 36, проход 40, выступ 38 и основное тело 54 дистального конца, тем самым поворачивая рабочий блок 14 дистального конца. Таким образом, механизм 88 вращения и соединение 26 работают как механизм вращения для поворота рабочего блока 14 дистального конца вокруг его собственной оси. Направление, в котором приводится в движение ведомое зубчатое колесо 94, соответствует направлению поворота рабочего блока 14 дистального конца.
Захватное приспособление 22 может быть раскрыто и закрыто, а рабочий блок 14 дистального конца может поворачиваться, когда соединительное звено 12 находится в прямом, изогнутом или искривленном положении. В медицинском манипуляторе 10 согласно настоящему варианту осуществления, поскольку искривляемый участок 30 не вращается, а вращается скорее только рабочий блок 14 дистального конца, даже когда соединительное звено 12 согнуто или искривлено (т.е. в состоянии, показанном штрих-пунктиром на Фигуре 1), в процессе своего вращения рабочий блок 14 дистального конца не раскачивается вокруг оси, продолжающейся от искривляемого участка 30 в направлении проксимального конца. Таким образом, пространственное положение захватного приспособления 22 (направление, в котором захватывается живая ткань) может быть изменено, в то время как захватное приспособление 22 остается в непосредственной близости к области, которая должна подвергнуться хирургическому вмешательству.
Что касается механизма 130 сгибания, путем простого задействования блока 128 ввода по изгибу для запуска приводов 140, 142 сгибания, вне зависимости от того, раскрыто или закрыто подвижное зажимающее звено 50 (вне зависимости от степени его раскрытия), имеется возможность наклонить наклонную пластину 138 на любой требуемый угол, тем самым легко согнуть соединительное звено 12 на требуемый угол на искривляемом участке 30. А именно, искривляемый участок 30 и механизм 130 сгибания работают как механизм сгибания для сгибания захватного приспособления 22 в направлении, пересекающем аксиальное направление соединительного звена 12, так чтобы легко и быстро изменить пространственное положение захватного приспособления 22.
С использованием медицинского манипулятора 10 согласно настоящему варианту осуществления, как описано выше, соединительное звено 12 может сгибаться механизмом 130 сгибания, а искривляемый участок 30 и рабочий блок 14 дистального конца могут поворачиваться механизмом 88 вращения легко и быстро посредством приводов 140, 142 сгибания и привода 90 вращения, служащих приводными устройствами, под контролем управляющего устройства 20, просто когда хирург кончиками пальцев управляет блоком 128 ввода по изгибу и блоком 86 ввода по вращению на функциональном блоке 16. Соответственно, медицинский манипулятор 10 обладает высокой управляемостью. А именно, в медицинском манипуляторе 10 механизм сгибания для сгибания участка (искривляемого участка 30) соединительного звена 12 и механизм вращения для поворота рабочего блока 14 дистального конца работают совместно как механизм изменения пространственного положения для изменения пространственного положения рабочего блока 14 дистального конца, и такие механизмы работают посредством приводных устройств. Захватное приспособление 22 рабочего блока 14 дистального конца раскрывается и закрывается (совершает угловое перемещение) хирургом, который вручную управляет зафиксированной рукояткой 80 и подвижной рукояткой 68 механически (непосредственно) независимо от работы механизма 130 сгибания и т.д. Поскольку захватным приспособлением 22 можно управлять для получения требуемой силы захвата, хирург может осуществлять вмешательство на пораженной части с большей точностью, ощущая твердость захваченного объекта. А именно, идеально управлять конечным исполнительным звеном (захватным приспособлением 22) путем передачи на него ручного действия механически и непосредственно. Кроме того, наилучший подход заключается в упрощении работы механизма 130 сгибания, искривляемого участка 30 и механизма 88 вращения, обеспечивающих другие оси углового наклона, т.е. работы механизма изменения пространственного положения, используя приводные устройства (приводы 140, 142 сгибания и привод 90 вращения). Другими словами, согласно настоящему изобретению, поскольку пространственное положение рабочего блока 14 дистального конца можно легко изменить, например, просто путем нажатия кнопок одним кончиком пальца руки, действия по изменению пространственного положения не создают помех другим действиям хирурга по раскрыванию и закрыванию захватного приспособления 22 и по перемещению медицинского манипулятора 10 как единого целого с использованием руки, что позволяет хирургу выполнять операцию на более высоком интуитивном уровне.
На Фигуре 14 показан увеличенный вид сбоку, частично в сечении, представляющий другой пример конструкции участка дистального конца медицинского манипулятора 10, показанного на Фигуре 1.
Рабочий блок 180 дистального конца, как показано на Фигуре 14, выполнен с возможностью обладания средством смещения для смещения подвижного зажимающего звена 50 в направлении раскрытия, расположенным в окрестности рабочего блока 14 дистального конца. Цилиндрическая пружина 46 размещается на участке 182 большого диаметра, диметр которого превышает размер пространства 24, образованном в местоположении, примыкающем к проксимальному концу соединения 26 соединительного звена 12. В пределах участка 182 большого диаметра второе соединительное звено 36 продолжается через цилиндрическую пружину 46, при этом к выступающему из цилиндрической пружины 46 в направлении дистального конца участку второго соединительного звена 36 крепится дискообразный фланец 184 или составляет с ним единое целое. Проксимальный конец цилиндрической пружины 46 в ее сжатом состоянии удерживается напротив проксимальной торцевой поверхности участка 182 большого диаметра, а дистальный конец удерживается напротив фланца 184, и эта пружина смещает второе соединительное звено 36 в направлении дистального конца.
Средство смещения не ограничивается цилиндрической пружиной 46 и может содержать другую пружину, такую как торсионная пружина, пластинчатая пружина и т.п., либо упругий материал, такой как резина, или постоянный магнит, или электромагнит. Средство смещения может размещаться в пределах функционального блока 16.
В ходе хирургического вмешательства может потребоваться значительное отслаивающее усилие в определенном направлении (направлении отслаивания), для того чтобы раскрыть захватное приспособление 22 для отслаивания ткани. Если цилиндрическую пружину 46 заменить пружиной, работающей на растяжение, а выталкивающее действие подвижной рукоятки 68 передавать непосредственно на захватное приспособление 22 через скользящий элемент 44, тогда можно создать значительное отслаивающее усилие. В медицинском манипуляторе 10 усилие, прикладываемое в направлении раскрытия захватного приспособления 22, передается на подвижную рукоятку 68. А именно, когда захватное приспособление 22 упирается в живую ткань или хирургический инструмент в направлении своего раскрытия, в то время когда захватное приспособление 22 раскрыто, подвижная рукоятка 68 перестает перемещаться в направлении раскрытия. Таким образом, хирург почувствует, что захватное приспособление 22 во что-то уперлось.
Механизм 88 вращения, механизм 130 сгибания, соединение 26, средство 100 преобразования, функциональный блок 16, разъемное соединение 35, соединительный элемент 37 и т.д. не ограничиваются приведенными выше конструкционными особенностями. В настоящем варианте осуществления средство хирургического вмешательства может содержать пару раскрывающихся и закрывающихся звеньев, способных совершать угловое перемещение, либо которые могут раскрываться и закрываться путем поступательного перемещения. Кроме того, средство хирургического вмешательства может содержать единственное звено, способное совершать угловое перемещение, такое как изгибаемые щипцы, электрохирургический нож, ультразвуковой нож и т.п.
Привод 90 вращения и приводы 140, 142 сгибания, которые являются приводными устройствами для приведения в действие механизма 88 вращения и механизма 130 сгибания, могут содержать приводные устройства, использующие давление текучей среды, такой как газ, жидкость и т.п., а не электродвигатели.
Блок 86 ввода по вращению и блок 128 ввода по сгибанию могут также быть выполнены как ножные переключатели, а не обеспечиваться на функциональном блоке 16. В этом случае ножные переключатели могут быть помещены возле ног хирурга, чтобы позволить хирургу выполнять ручные приемы более спокойно.
Подвижная рукоятка 68, блок 86 ввода по вращению и блок 128 ввода по сгибанию на функциональном блоке 16 не ограничиваются положениями, формами и способами работы, представленными выше. Блок 86 ввода по вращению можно заменить управляющими роликами, кнопками или ручкой управления. Кроме того, могут быть подобраны различные положения и разработаны различные способы, позволяющие легко управлять манипулятором.
Медицинский манипулятор 1010 согласно другому варианту осуществления будет описан ниже со ссылкой на Фигуры 15-57.
Как показано на Фигуре 15, медицинский манипулятор 1010 согласно настоящему варианту осуществления составляет часть медицинской манипуляционной системы и соединен с управляющим устройством 1045.
Управляющее устройство 1045, выполненное с возможностью электрического управления медицинским манипулятором 1010, соединено через соединительный элемент с кабелем 1062, продолжающимся от нижнего конца захватной рукоятки 1026. Управляющее устройство 1045 может управлять множеством медицинских манипуляторов 1010 независимо. Разумеется, может быть также использовано управляющее устройство для управления единственным медицинским манипулятором 1010.
Медицинский манипулятор 1010 включает в себя рабочий блок 1012 дистального конца для захвата участка живой ткани, а также изогнутой иглы или нечто подобное для проведения заданного оперативного лечения. Медицинский манипулятор 1010 обычно упоминается в качестве захватных щипцов или иглодержателя (держателя для иглы).
Как показано на Фигурах 15 и 16, медицинский манипулятор 1010 содержит функциональный блок 1014, который удерживается и управляется рукой, а также рабочий блок 1016, закрепленный на функциональном блоке 1014. Функциональный блок 1014 и рабочий блок 1016 составляют друг с другом единое целое. Однако, в зависимости от обстоятельств, функциональный блок 1014 и рабочий блок 1016 могут быть раздельными друг от друга.
В последующем описании будем считать, что поперечные направления на Фигурах 15 и 16 принимаются за X-направления, вертикальные направления - за Y-направления, а продольные направления соединительного стержня 1048 - за Z-направления. Из X-направлений направление вправо, если смотреть со стороны дистального конца, принимается за направление X1, а направление влево - за направление X2. Из Y-направлений направление вверх принимается за направление Y1, а направление вниз - за направление Y2. Из Z-направлений направление вперед принимается за направление Z1, а направление назад - за направление Z2. Если не указано иное, данные направления представляют направления медицинского манипулятора 1010 в его нейтральном положении. Вышеприведенные определения направлений служат лишь целям иллюстрации. Медицинский манипулятор 1010 может использоваться в любом из пространственных положений, например, его можно использовать в перевернутом положении.
Рабочий блок 1016 содержит рабочий блок 1012 дистального конца для выполнения рабочих операций, а также удлиненный полый соединительный стержень (соединительное звено) 1048, соединяющий рабочий блок 1012 дистального конца и функциональный блок 1014 между собой. Рабочий блок 1012 дистального конца и соединительный стержень 1048 имеют небольшой диаметр и могут вводиться в полость 1022 организма через троакар 1020, выполненный в форме полого цилиндра, установленного внутри абдоминальной или иной области пациента. Рабочий блок 1012 приводится в действие комбинированным блоком 1034 ввода с целью выполнения различных приемов захвата, удаления, сшивания или завязывания узла на пораженной части организма пациента в пределах полости 1022 организма.
Функциональный блок 1014 включает в себя захватную рукоятку 1026, захватываемую рукой, перемычку 1028, продолжающуюся от верхнего участка захватной рукоятки 1026, а также приводной блок 1030 и спусковой рычаг (блок ввода) 1032, которые присоединены к дистальному концу перемычки 1028.
Как показано на Фигуре 15, захватная рукоятка 1026 функционального блока 1014 продолжается в направлении Y2 от конца перемычки 1028 и имеет длину, пригодную для захвата рукой. Комбинированный блок 1034 ввода расположен на захватной рукоятке 1026.
Кабель 1062, присоединенный к управляющему устройству 1045, расположен на нижнем конце захватной рукоятки 1026, будучи соединенным с захватной рукояткой 1026 в единое целое. Захватная рукоятка 1026 и кабель 1062 могут соединяться друг с другом посредством соединительного элемента.
Комбинированный блок 1034 ввода составляет комбинированное средство ввода для подачи команд поворота в направлениях вращения (осевого вращения) и рыскания (влево и вправо) рабочему блоку 1012 дистального конца. Например, команды на направление движения рыскания подаются первым средством 1034а ввода, работающим в латеральном направлении, в то время как команды на направление вращения подаются вторым средством 1034b ввода, работающим в направлении осевого вращения. Спусковой рычаг 1032 содержит средство ввода для подачи команд раскрытия и закрытия конечного исполнительного звена 1104 (см. Фигуру 15) рабочего блока 1012 дистального конца. Хотя конечное исполнительное звено 1104 доступно в различных формах, в медицинском манипуляторе 1010 используется раскрываемое и закрываемое захватное приспособление.
Комбинированный блок 1034 ввода включает в себя входной датчик для детектирования управляющей переменной и подает детектирующий рабочий сигнал (например, аналоговый сигнал) на управляющее устройство 1045.
Спусковой рычаг 1032 содержит рычаг, расположенный под перемычкой 1028, и расположен в положении, при котором им легко управлять указательным пальцем. Спусковой рычаг 1032 соединен с приводным блоком 1030 с помощью первого звена 1064 и второго звена 1066 и может перемещаться по направлению к захватной рукоятке 1026 и от нее. Первое звено 1064 шарнирно поворачивается с возможностью качания вокруг участка перемычки 1028, а спусковой рычаг 1032 установлен на конце первого звена 1064 в направлении Y2. Второе звено 1066 выступает в направлении Z2 из приводного блока 1030 и входит в зацепление с удлиненным отверстием 1064а, образованным в первом звене 1064. Второе звено 1066 может возвратно-поступательно перемещаться в продольном направлении в удлиненном отверстии 1064а при перемещении спускового рычага 1032.
Второе звено 1066 соединено с концом проволоки (приводным звеном) 1056. Когда спусковой рычаг 1032 отжимается, проволока 1056 натягивается вместе с ним. Поскольку проволока 1056 используется в качестве приводного звена (передающего звена), присоединенного ко второму звену 1066, количество используемых частей может быть снижено, и вес медицинского манипулятора 1010 уменьшается.
Приводное звено, присоединенное ко второму звену 1066, может содержать, например, жесткий, линейно перемещаемый стержень (или звено) вместо проволоки 1056. Поскольку стержень, в общем, является более жестким, чем проволока, стержень можно использовать в качестве линейно перемещаемого звена для создания больших усилий захвата. Стержень и второе звено 1066 могут быть объединены друг с другом в единое целое.
Звенья, зубчатые передачи и т.д. могут функционально располагаться между вторым звеном 1066 и проволокой 1056 для регулирования рабочих усилий и величин хода, создаваемых хирургом.
Приводной блок 1030 вмещает в себя двигатели (приводы ориентации по осям) 1040, 1041, согласованные с соответствующими механизмами обеспечения двух из трех степеней свободы, встроенными в рабочий блок 1012 дистального конца. Двигатели 1040, 1041 выставлены параллельно друг другу в продольном направлении соединительного стержня 1048. Двигатели 1040, 1041 отвечают за перемещения как в направлениях вращения, так и движения рыскания рабочего блока 1012 дистального конца, т.е. за перемещения механизма изменения пространственного положения для изменения пространственного положения рабочего блока 1012 дистального конца. Двигатели 1040, 1041 имеют малый размер и диаметр, что позволяет приводному блоку 1030 быть компактным и плоским по форме. Двигатели 1040, 1041 могут быть выполнены с возможностью вращения приводных валов под контролем управляющего устройства 1045 на основе работы функционального блока 1014. Двигатели 1040, 1041 объединены с угловыми датчиками для детектирования поворотных углов и подачи сигналов, соответствующих распознанным углам, на управляющее устройство 1045. Угловые датчики могут содержать, например, кодовые датчики угла поворота. Вместо электрических двигателей приводы могут содержать приводные устройства, использующие давление текучей среды, например, такой, как газ, жидкость и т.п.
Приводной блок 1030 вмещает в себя шкивы 1050а, 1050b, соединенные соответственно с приводными валами двигателей 1040, 1041.
Проволоки 1052, 1054 намотаны соответственно на шкивы 1050а, 1050b и продолжаются через полую область 1048а (см. Фигуру 20) в соединительном стержне 1048 в направлении рабочего блока 1012 дистального конца. Проволоки 1052, 1054 могут быть одного вида и иметь одинаковый диаметр.
Комбинированный блок 1034 ввода и спусковой рычаг 1032 функционального блока 1014 не ограничены вышеописанными и проиллюстрированными положениями, формами и способами работы. Например, комбинированный блок 1034 ввода можно заменить управляющими роликами, кнопками или ручкой управления. Кроме того, могут быть подобраны другие положения и разработаны другие способы, позволяющие легко управлять манипулятором.
Ручное воздействие, прикладываемое к спусковому рычагу 1032, механически передается на раскрытие и закрытие конечного исполнительного звена 1104. Первое звено 1064, второе звено 1066, проволока 1056, а также механизм 1260 привода конечного исполнительного звена, который будет описан далее, служат средством (передающими звеньями) для механической передачи ручного воздействия между спусковым рычагом 1032 и конечным исполнительным звеном 1104 и составляют блок передачи управления.
Термин «механически» относится к системе для передачи ручного управления через проволоку, цепь, зубчатый ремень, звено, стержень, зубчатое колесо и т.п., которая главным образом приводится в действие в направлении передачи мощности посредством механической составляющей в форме неупругого твердого тела. Хотя проволока, цепь и т.п. неизбежно незначительно вытягиваются в условиях растяжения, тем не менее, они рассматриваются как механические составляющие в форме неупругого твердого тела.
Ниже будут описаны конструкционные примеры с первого по пятый, 1012а-1012е, и модификация 1012f рабочего блока 1012 дистального конца.
Как показано на Фигурах 17, 18, 19, 20 и 21, рабочий блок 1012а дистального конца согласно первому примеру конструкции содержит механизм 1100 с проволочным приводом, комбинированный механизм 1102, а также конечное исполнительное звено 1104. Рабочий блок 1012 дистального конца объединяет в себе механизмы, обеспечивающие три степени свободы. Эти механизмы включают в себя механизм, имеющий первую степень свободы для углового перемещения участка рабочего блока 1012 дистального конца, расположенного спереди первой вращательной оси 0y, проходящей в Y-направлении, в направлении движения рыскания вокруг первой вращательной оси 0y, механизм, имеющий вторую степень свободы для углового перемещения участка рабочего блока 1012 дистального конца в направлении вращения вокруг второй вращательной оси 0r, а также механизм, имеющий третью степень свободы для раскрывания и закрывания конечного исполнительного звена 1104 на дистальном конце рабочего блока 1012 дистального конца вокруг третьей вращательной оси 0g.
Первая вращательная ось 0y механизма, имеющего первую степень свободы, может совершать угловые перемещения непараллельно оси С, проходящей от проксимального конца до дистального конца соединительного стержня 1048. Вторая вращательная ось 0r механизма, имеющего вторую степень свободы, может совершать угловые перемещения вокруг оси вдоль направления, в котором продолжается дистальный конец (конечное исполнительное звено 1104) рабочего блока 1012 дистального конца, при этом его участок дистального конца может поворачиваться в направлении вращения.
Механизм, имеющий первую степень свободы (т.е. тот, что может перемещаться в направлении движения рыскания), содержит механизм сгибания с рабочим диапазоном, например, ±90° или более. Механизм, имеющий вторую степень свободы (т.е. тот, что может перемещаться в направлении вращения), содержит поворотный механизм с рабочим диапазоном, например, ±180° или более. Механизм, имеющий третью степень свободы (т.е. конечное исполнительное звено 1104), может раскрываться, например, на 40° или более.
Конечное исполнительное звено 1104 содержит звено для выполнения реальной работы в процессе операции. Первая вращательная ось 0y и вторая вращательная ось 0r представляют собой оси ориентации механизма изменения пространственного положения для изменения пространственного положения конечного исполнительного звена 1104 в целях обеспечения проведения работы. В общем случае механизм, имеющий третью степень свободы для раскрывания и закрывания конечного исполнительного звена 1104, именуется как захватное приспособление (или ось схвата). Механизм, имеющий первую степень свободы для поворота в направлении движения рыскания, именуется как вертикальная ось поворота, а механизм, имеющий вторую степень свободы для поворота в направлении вращения, именуется как ось ротации.
Механизм 1100 с проволочным приводом располагается между парой язычковых элементов 1058 и служит преобразованию возвратно-поступательного перемещения соответствующих проволок 1052, 1054 в поворотное движение, а также передаче такого поворотного движения комбинированному механизму 1102. Механизм 1100 с проволочным приводом включает в себя вал 1110, который вводится в отверстия 1060а, 1060а вала, и вал 1112, который вводится в отверстия 1060b, 1060b вала. Валы 1110 и 1112 надежно запрессованы в отверстия 1060а, 1060b валов или приварены к ним. Вал 1112 совмещен в осевом направлении с первой вращательной осью 0y.
Зубчатые тела 1126, 1130, имеющие симметричную форму в Y-направлении, установлены соответственно на обоих концах вала 1112 соответственно в Y-направлении. Зубчатое тело 1126 содержит трубчатый элемент 1132 и первое зубчатое колесо 1134, расположенное концентрически на верхнем участке трубчатого элемента 1132. Зубчатое тело 1130 по существу идентично по форме зубчатому телу 1126 и располагается по одной оси с зубчатым телом 1126 в Y-направлении. Зубчатое тело 1130 содержит трубчатый элемент 1136 и второе зубчатое колесо 1138, расположенное концентрически на нижнем участке трубчатого элемента 1136. Зубчатые колеса 1134, 1138 удерживаются в зацеплении с верхним и нижним концом плоского зубчатого колеса 1165 зубчатого тела 1146, что будет описано ниже.
Трубчатый элемент 1136 по существу идентичен по диаметру и форме трубчатому элементу 1132. Проволоки 1052, 154 накручены на трубчатые элементы 1132, 1136 и имеют участки, закрепленные на них с помощью крепежного средства. Проволоки 1052, 154 накручены на 1,5 витка (540°) вокруг трубчатых элементов 1132, 1136.
При повороте проволок 1052, 1054 зубчатые тела 1126, 1130 поворачиваются вокруг вала 1112. Когда зубчатые тела 1126, 1130 поворачиваются с одинаковой скоростью и в одном направлении, зубчатое тело 1146 совершает качание относительно вала 1112 и перемещается в направлении движения рыскания. Когда зубчатые тела 1126, 1130 поворачиваются с одинаково скоростью, но в противоположных направлениях, зубчатое тело 1146 поворачивается вокруг второй вращательной оси 0r и совершает движение в направлении ротации. Когда зубчатые тела 1126, 1130 поворачиваются с различными скоростями, зубчатое тело 1146 совершает комбинированное движение как в направлении движения рыскания, так и ротации. Зубчатое колесо 1126, зубчатое колесо 1130 и зубчатое колесо 1146 совместно образуют дифференциальный механизм.
Холостой шкив (цилиндрическое звено, передающее звено) 1140 поддерживается с возможностью вращения по существу по центру вала 1110. Направляющий шкив (цилиндрическое звено, передающее звено) 1142 поддерживается с возможностью вращения по существу по центру вала 1112. Холостой шкив 1140 служит сохранению намотки ведомой проволоки (гибкого звена, передающего звена) 1252 вокруг направляющего шкива 1142 на постоянный угол (примерно 180° с каждой стороны) на протяжении всего времени. Вместо использования холостого шкива 1140 ведомая проволока 1252 может быть также намотана на один или несколько оборотов вокруг направляющего шкива 1142. Холостой шкив 1140 и направляющий шкив 1142 могут иметь гладкую поверхность и могут быть выполнены из материала с малым коэффициентом трения с целью снижения проскальзывания и фрикционного износа ведомой проволоки 1252 (см. Фигуру 22). Направляющий шкив 1142 расположен по вертикальной оси поворота 0y механизма изменения пространственного положения.
Главный вал 1144 поддерживается с возможностью вращения на валу 1112 между зубчатым телом 1126 и направляющим шкивом 1142, а также между направляющим шкивом 1142 и зубчатым телом 1130. Главный вал 1144 имеет втулку, выступающую в направлении комбинированного механизма 1102. Главный вал 1144 имеет прямоугольное отверстие 1144а, образованное по его оси. Главный вал 1144 включает в себя две вспомогательные пластины 1144b, расположенные на одном конце в направлении Z2 для удерживания обеих поверхностей направляющего шкива 1142 в Y-направлении. Вспомогательные пластины 1144b имеют соответствующие отверстия, через которые проходит вал 1112. Вспомогательные пластины 1144b имеют форму шеврона, расширяющуюся в направлении Z1, для предотвращения попадания туда инородных предметов, таких как нити.
Комбинированный механизм 1102 включает в себя механизм раскрытия/закрытия для раскрывания и закрывания конечного исполнительного звена 1104, а также механизм изменения пространственного положения для изменения пространственного положения конечного исполнительного звена 1104.
Комбинированный механизм 1102 содержит зубчатое тело 1146, посаженное с возможностью вращения на периферийную поверхность втулки главного вала 1144, резьбовую муфту 1148, установленную на дистальном конце главного вала 1144, пружину 1150, стержень (передающее звено) 1152 прямоугольного сечения, конец которого в направлении Z2 вводится в отверстие 1144а, ведомый шкив (цилиндрическое звено, передающее звено) 1156, который поддерживается на конце в направлении Z2 стержня 1152 с помощью пальца 1154, ведомую пластину 1158 (передающее звено), а также полый цилиндрический кожух 1160. Пружина 1150 содержит пружину сжатия. Конец в направлении Z2 стержня 1152 имеет форму швеллера для улучшения его скольжения относительно ведомого шкива 1156, и этот конец стержня 1152 значительно выступает в направлении Z2.
Подпятник 1144с, выполненный из полимера, расположен на участке главного вала 1144, который упирается в зубчатое тело 1146. Еще один подпятник 1148а, выполненный из полимера, расположен на участке резьбовой муфты 1148, который упирается в зубчатое тело 1146. Подпятники 1144с и 1148а имеют низкий коэффициент трения для снижения износа и крутящего момента на опорных участках и для предотвращения приложения нагрузки непосредственно на плоское зубчатое колесо 1165. Подпятники 1144с и 1148а содержат, например, скользящие опоры, но могут содержать роликовые опоры, позволяя тем самым медицинскому манипулятору нормально работать по оси ротации, даже когда конечное исполнительное звено 1104 с усилием закрыто или раскрыто, т.е. даже когда зубчатое тело 1146 с силой упирается в главный вал 1144.
Зубчатое тело 1146 имеет ступенчатую форму и содержит участок 1162 большого диаметра в направлении Z2, участок 1164 малого диаметра в направлении Z1, а также плоское зубчатое колесо 1165 на конце участка 1162 большого диаметра в направлении Z2. Плоское зубчатое колесо 1165 удерживается в зацеплении с зубчатыми колесами 1134, 1138. Зубчатое тело 1146 не позволяет резьбовой муфте 1148 сместиться с главного вала 1144. Участок 1162 большого диаметра имеет внешнюю окружную поверхность с наружной резьбой.
Ведомая пластина 1158 имеет выемку 1166 в направлении Z2, полость 1168 зацепления, образованную у основания выемки 1166, осевые ребра 1170, расположенные соответственно на обеих поверхностях в Y-направлении, а также соединительное отверстие 1172. Полость 1168 зацепления обладает формой, способной войти в зацепление с грибовидным выступом 1174 на дистальном конце стержня 1152. Когда грибовидный выступ 1174 входит в зацепление с полостью 1168 зацепления, ведомая пластина 1158 и стержень 1152 способны совершать поворот соответственно относительно друг друга вокруг оси ротации. Ширина ведомой пластины 1158 по существу равна внутреннему диаметру кожуха 1160.
Кожух 1160 имеет достаточно большой размер для укрытия комбинированного механизма 1102 по существу целиком и служит предотвращению попадания инородных материалов (живой ткани, лекарственных средств, нитей и пр.) в комбинированный механизм 1102 и конечное исполнительное звено 1104. Кожух 1160 имеет две осевые канавки 1175, образованные на его внутренней окружной поверхности 1175 в диаметрально противоположном расположении друг к другу. Ребра 1170 ведомой пластины 1158 входят без зазора соответственно в канавки 1175 для аксиального направления ведомой пластины 1158. Поскольку выступ 1174 входит в зацепление с полостью 1168 зацепления ведомой пластины 1158, ведомый шкив 1156 может совершать возвратно-поступательное перемещение по оси в пределах отверстия 1144а совместно с ведомой пластиной 1158 и стержнем 1152 и может совершать поворот вокруг стержня 1152. Кожух 1160 крепится к участку 162 большого диаметра зубчатого тела 1146 путем резьбового зацепления с ним или путем запрессовки и т.п.
Пружина 1150 установлена между ступенью зубчатого тела 1146 и выемкой 1166 ведомой пластины 1158 с целью смещения в нормальных условиях ведомой пластины 1158 для перемещения вперед до упора в стопор.
Конечное исполнительное звено 1104 содержит первый элемент 1190 конечного исполнительного звена, второй элемент 1192 конечного исполнительного звена, а также палец 1196. Палец 1196 располагается по третьей вращательной оси 0g.
Первый элемент 1190 конечного исполнительного звена имеет пару боковых стенок 1200, латерально обращенных друг к другу, отверстия 1200а, расположенные соответственно на дистальных концах боковых стенок 1200, а также первое захватное приспособление 1202, выступающее в направлении Z1 от нижних участков дистальных концов боковых стенок 1200. Диаметр отверстия 1200а таков, что палец 1196 может быть запрессован в отверстие 1200а. Первое захватное приспособление 1202 постепенно сужается в направлении Z1 и включает в себя дугообразный участок дистального конца. Первое захватное приспособление 1202 имеет набор конических зубцов, расположенных близко друг к другу по всей его поверхности, обращенных по направлению Y1. Первый элемент 1190 конечного исполнительного звена соединен с кожухом 1160 некоторым соединительным средством. Например, первый элемент 1190 конечного исполнительного звена и кожух 1160 могут быть единой конструкцией, образуя комбинированное трубчатое тело 1230.
Кожух 1160 соединен на проксимальном участке с зубчатым телом 1146 (посредством резьбового зацепления, запрессовки, сварки и т.п.). При вращении зубчатого тела 1146 кожух 1160 и первый элемент 1190 конечного исполнительного звена работают по оси ротации.
Второй элемент 1192 конечного исполнительного звена имеет L-образную форму и содержит второе захватное приспособление 1212, продолжающееся в Z-направлении, а также рычаг 1214, изогнутый примерно на 60° относительно второго захватного приспособления 1212. Второй элемент 1192 конечного исполнительного звена имеет отверстие 1216, образованное в L-образном изогнутом углу, а рычаг 1214 имеет отверстие 1218, образованное в нем вблизи его концевого участка. Когда палец 1196 введен в отверстие 1216, второй элемент 1192 конечного исполнительного звена может совершать качание вокруг третьей вращательной оси 0g. Второе захватное приспособление 1212 имеет форму, идентичную форме первого захватного приспособления 1202, однако расположено в зеркально отображенном виде. Когда второй элемент 1192 конечного исполнительного звена совершает угловое перемещение вокруг третьей вращательной оси 0g, второй элемент 1192 конечного исполнительного звена упирается в первое захватное приспособление 1202 для захвата изогнутой иглы или схожего предмета. Рычаг 1214 и ведомая пластина 1158 соединены друг с другом посредством двух параллельных звеньев 1220 захватного приспособления. А именно, палец 1222 вводится в отверстия 1220а, образованные на соответствующих концах звеньев 1220 захватного приспособления, и в отверстие 1218, а палец 1124 вводится в отверстия 1220b, образованные соответственно на других концах звеньев 1220 захватного приспособления, и в отверстие 1172.
Положение пальца 1124, посредством которого звенья 1220 захватного приспособления поддерживаются с возможностью шарнирного поворота, незначительно смещено от центральной оси на Фигуре 19 (при виде сбоку). Однако палец 1124 может располагаться на центральной оси при виде сбоку. Положение пальца 1124 может определяться с учетом баланса действующих сил, пространственного фактора и простоты сборки составных частей. Пальцы могут объединяться со звеньями 1220 захватного приспособления в единое целое.
Два звена 1220 захватного приспособления располагаются параллельно друг другу для должного уравновешивания сил и для предотвращения приложения случайных моментных нагрузок. В зависимости от расчетных условий может использоваться только одно звено захватного приспособления.
Когда ведомый шкив 1156, стержень 1152 и ведомая пластина 1158 перемещаются в направлении Z2, рычаг 1214 также оттягивается в направлении Z2, что приводит к перемещению второго захватного приспособления 1212 в направлении первого захватного приспособления 1202, так чтобы захватить объект между ними. Наоборот, когда ведомый шкив 1156, стержень 1152 и ведомая пластина 1158 перемещаются в направлении Z1 под действием пружины 1150, рычаг 1214 также проталкивается в направлении Z1, что приводит к перемещению второго захватного приспособления 1212 в направлении от первого захватного приспособления 1202 и раскрытию конечного исполнительного звена 1104. Поскольку ведомая пластина 1158 в нормальном состоянии смещается пружиной 1150 для перемещения в направлении Z1, если медицинским манипулятором не управляют вручную, второе захватное приспособление 1212 пространственно разделяется с первым захватным приспособлением 1202, в результате чего конечное исполнительное звено 1104 раскрывается. Пружина 1150 эффективно удерживает проволоку 1056 и ведомую проволоку 1252 в условиях соответствующего натяжения и не допускает их провисания. Таким образом, образование люфтов между различными частями не допускается, и медицинский манипулятор способен захватывать объекты с высокой оперативностью.
Для краткости термин «конечное исполнительное звено 1104» будет далее использоваться для обозначения первого захватного приспособления 1202 и второго захватного приспособления 1212.
Как показано на Фигуре 21, холостой шкив 1140 содержит два параллельных шкива, а именно холостой шкив первого ряда (неактивное цилиндрическое тело первого ряда) 1232 и холостой шкив второго ряда (неактивное цилиндрическое тело второго ряда) 1234, которые установлены соосно друг с другом. Направляющий шкив 1142 содержит два параллельных шкива, а именно направляющий шкив первого ряда (направляющее цилиндрическое тело первого ряда) 1236 и направляющий шкив второго ряда (направляющее цилиндрическое тело второго ряда) 1238, которые установлены соосно друг с другом.
В концевой части в направлении Z2 на Фигуре 21 один из отрезков ведомой проволоки 1252 удерживается у поверхностей холостого шкива 1232 первого ряда в направлениях X1 и Z1, а также удерживается у поверхностей направляющего шкива 1236 первого ряда в направлениях Z2 и X2, продолжаясь к ведомому шкиву 1156.
В концевой части в направлении Z2 на Фигуре 21 второй отрезок ведомой проволоки 1252 удерживается у поверхностей холостого шкива 1234 второго ряда в направлениях X2 и Z2, а также удерживается у поверхностей направляющего шкива 1238 второго ряда в направлениях Z1 и X1, продолжаясь к ведомому шкиву 1156.
Когда проволока 1056 (см. Фигуру 22) натягивается, например, в направлении Z2, холостой шкив 1232 первого ряда и направляющий шкив 1238 второго ряда вращаются против часовой стрелки, если смотреть сверху, в то время как холостой шкив 1234 второго ряда и направляющий шкив 1236 первого ряда вращаются по часовой стрелке, если смотреть сверху. Поскольку и холостой шкив 1140, и направляющий шкив 1142 содержат два параллельных соосных шкива, шкивы могут вращаться в противоположных направлениях при перемещении ведомой проволоки 1252, удерживаемой на них, а потому шкивы работают безотказно.
Как показано на Фигуре 22, конец проволоки 1056 в направлении Z1 соединен с обоими концами ведомой проволоки (гибким звеном) 1252 с помощью концевого звена 1250 (или сваркой, через отверстие и т.д.). Ведомая проволока 1252 выполнена в форме кольцеобразного гибкого звена, имеющего участок, соединенный с проволокой 1056, и альтернативно может содержать веревку, полимерный провод, рояльную проволоку, цепь и т.п. Термин «кольцеобразный» следует понимать в широком смысле. Гибкое звено не обязательно должно прикладываться по всей длине. А именно, по меньшей мере, участок ведомой проволоки 1252, который намотан вокруг каждого из шкивов, может представлять собой гибкое звено, линейный участок которого присоединен жестким элементом. Ведомая проволока 1252 может составлять часть проволоки 1056.
Ведомая проволока 1252 проходит от проволоки 1056, служащей ведущим звеном, вдоль холостого шкива 1140 в направлении X1 (первая сторона) и продолжается в направлении X2 (вторая сторона), а далее проходит вдоль направляющего шкива 1142 в направлении X2 и продолжается к поверхности ведомого шкива 1156 в направлении X2. Ведомая проволока 1252 далее наматывается на половину оборота вокруг поверхности ведомого шкива 1156 в направлении Z1 и продолжается к его поверхности в направлении X1, и, будучи ориентированной в направлении X2, ведомая проволока 1252 проходит вдоль холостого шкива 1140 в направлении X2 и продолжается к концевому звену 1250.
Ведомая проволока 1252, таким образом, проходит по замкнутому контуру, начальная и конечная точки которого находятся на концевом звене 1250. Ведомая проволока 1252 проходит вдоль обеих сторон холостого шкива 1140 и наматывается вокруг ведомого шкива 1156, пересекаясь с самой собой между холостым шкивом 1140 и направляющим шкивом 1142, образуя тем самым конфигурацию в форме «восьмерки». Концевое звено 1250 и ведомая проволока 1252 механически присоединены к спусковому рычагу 1032 проволокой 1056.
Термин «механически» относится к системе для приведения в действие звеньев посредством механической составляющей в форме твердого тела, неупругого в направлении передачи мощности. Хотя проволока 1056 представляет собой гибкое звено, она должным образом нагружена на растяжение пружиной 1150. Для закрывания конечного исполнительного звена 1104 проволока 1056 натягивается в направлении Z2 спусковым рычагом 1032 и по существу упруго не деформируется, либо неизбежно упруго деформируется лишь в той степени, которая безопасна для работы, что обеспечивает механическое соединительное средство. Ведомая проволока 1252 пересекает саму себя, если смотреть сверху.
Холостой шкив 1140, направляющий шкив 1142 и ведомый шкив 1156 имеют по существу одинаковый диаметр, представляющий собой достаточно большой диаметр, насколько позволяет схема расположения, так чтобы ведомая проволока 1252 не перегибалась. Концевое звено 1250 расположено на достаточном расстоянии от холостого шкива 1140, так чтобы ведомая проволока 1252 чрезмерно не перегибалась. Оба конца ведомой проволоки 1252 образуют острый угол на концевом звене 1250. Поскольку пружина 1150 (см. Фигуру 18) смещает ведомую пластину 1158, заставляя перемещаться в направлении Z1, ведомый шкив 1156 и ведомая пластина 1158 испытывают воздействие усилий в направлении Z1. Ведомая проволока 1252 и проволока 1056, таким образом, находятся в состоянии растяжения и не провисают. Зазор между холостым шкивом 1140 и направляющим шкивом 1142 мал, например, по существу тот же, что толщина ведомой проволоки 1252.
Холостой шкив 1140, направляющий шкив 1142 и ведомый шкив 1156 могут иметь фланцы на своих верхних и нижних поверхностях или могут иметь вогнутые боковые поверхности, чтобы предотвратить выпадение ведомой проволоки 1252. В иллюстративных целях проволока 1056, ведомая проволока 1252, холостой шкив 1140, направляющий шкив 1142, ведомый шкив 1156 и конечное исполнительное звено 1104 будут совместно называться механизмом 1260 привода конечного исполнительного звена. В механизме 1260 привода конечного исполнительного звена, как показано на Фигуре 22, ведомая проволока 1252, холостой шкив 1140, направляющий шкив 1142 и ведомый шкив 1156 расположены по центральной линии от проксимального конца до дистального конца. Конечное исполнительное звено 1104 соединено с ведомым шкивом 1156 посредством стержня 1152.
Работа медицинского манипулятора 1010 такой конструкции будет описана ниже.
Как показано на Фигуре 22, если к спусковому рычагу 1032 не прикасаться, конечное исполнительное звено 1104 раскрыто в силу упругих характеристик пружины 1150. X-направление на Фигурах 22, 23, 24, 25, 36, 37, 52, 53 и 55 обозначено относительно рабочего блока 1012а дистального конца, а вертикальное направление спускового рычага 1032 соответствует Y-направлениям.
Как показано на Фигуре 23, когда спусковой рычаг 1032 полностью отжат рукой, проволока 1056 натягивает ведомую проволоку 1252, перемещая ведомый шкив 1156 и стержень 1152 в направлении Z2, при этом сжимая пружину 1150, что приводит к закрыванию конечного исполнительного звена 1104. Другими словами, конечное исполнительное звено 1104 закрыто, когда передающие звенья, в том числе проволока 1056, ведомая проволока 1252 и ведомый шкив 1156, оттянуты. В этом случае к спусковому рычагу 1032 требуется приложить усилия для сжатия пружины 1150. Для раскрытия конечного исполнительного звена 1104 сила, приложенная к спусковому рычагу 1032, снимается, что позволяет стержню 1152 продвинуться в направлении дистального конца под возвратным усилием пружины 1150 и вернуть конечное исполнительное звено 1104 в раскрытое состояние.
Поскольку ведомая проволока 1252 имеет кольцеобразную форму, она образует два отрезка, левый и правый. Таким образом, усилие, прикладываемое для закрытия конечного исполнительного звена 1104, разделяется по существу на два равных усилия, которые действуют как усилия растяжения на соответствующих отрезках ведомой проволоки 1252. Следовательно, ведомая проволока 1252 может иметь меньший диаметр, чем проволока 1056, и может быть достаточно гибкой.
Как показано на Фигуре 24, когда конечное исполнительное звено 1104 захватывает объект (хирургический инструмент, живую ткань и т.п.) W, в тот момент когда спусковой рычаг 1032 отжат рукой до определенной степени, конечное исполнительное звено 1104, ведомая пластина 1158, стержень 1152 и ведомый шкив 1156 по существу далее не перемещаются либо перемещаются лишь на расстояние, соответствующее упругой деформации ведомой проволоки 1252 и других компонентов, а также упругой деформации объекта W. Ведомая проволока 1252, проволока 1056 и спусковой рычаг 1032 далее не перемещаются в направлении Z2, что позволяет хирургу почувствовать кончиками пальцев, что конечное исполнительное звено 1104 захватило объект W.
Если объект W представляет собой твердый предмет, такой как хирургический инструмент или нечто подобное, тогда спусковой рычаг 1032 по существу не имеет возможности перемещаться в направлении Z2. Хирург, таким образом, может ощутить, что конечное исполнительное звено 1104 захватило нечто твердое, и конечное исполнительное звено 1104 может надежно захватить объект W с большим усилием, поскольку хирург может передать ручное усилие механически и непосредственно на конечное исполнительное звено 1104, а не через электромагнитное средство. Если бы усилие захвата, эквивалентное такому ручному усилию, генерировалось двигателем, двигатель должен был быть достаточно большим и тяжелым и не мог бы с готовностью располагаться в приводном блоке 1030, а кроме того, медицинский манипулятор 1010 стал бы более тяжелым.
Если объект W представляет собой мягкий предмет, такой как живая ткань или нечто подобное, тогда спусковой рычаг 1032 может незначительно сместиться в направлении Z2 в зависимости от упругих характеристик объекта W. Хирург, таким образом, может ощутить, что конечное исполнительное звено 1104 захватило нечто мягкое, и может распознать, насколько объект W мягок, также как отрегулировать усилие, с которым объект W захватывается.
Когда проволоки и другие части изнашиваются или деградируют, трение возрастает и передается на спусковой рычаг 1032, позволяя хирургу почувствовать разницу в состоянии или ненормальное состояние системы привода. Таким образом, хирург может принять решение о времени технического обслуживания с большей точностью.
Как показано на Фигуре 25, когда конечное исполнительное звено 1104 управляется вокруг вертикальной оси поворота, ведомый шкив 1156 осуществляет вращение вокруг себя, при этом совершая поворот вокруг направляющего шкива 1142. Поскольку расстояние между ведомым шкивом 1156 и направляющим шкивом 1142 остается неизменным, стержень 1152 соответственно не приводится в действие и механических помех не возникает. Когда конечное исполнительное звено 1104 управляется вокруг оси ротации, поскольку стержень 1152 расположен так, что проходит по центру оси ротации, стержень 1152 не приводится в действие, и механических помех не возникает. Другими словами, механизмом 1260 привода конечного исполнительного звена обеспечивается конструкция, не создающая помех.
Поскольку холостой шкив 1140 и направляющий шкив 1142 располагаются достаточно близко друг к другу, то даже когда конечное исполнительное звено 1104 приводится в действие при повороте на 90° вокруг вертикальной оси поворота, угол, на который ведомая проволока 1252 наматывается вокруг ведомого шкива 1156, остается практически неизменным, и в ответ на захватное действие крутящий момент, создающий помехи по вертикальной оси поворота и оси ротации, по существу не образуется.
Если холостой шкив 1140 и направляющий шкив 1142 разнесены друг от друга на определенное расстояние, то когда конечное исполнительное звено 1104 в значительной степени управляется по оси ротации, ведомая проволока 1252 пространственно отделена от одной из поверхностей направляющего шкива 1142. Ведомая проволока 1252, таким образом, выходит из равновесия в X-направлении (исходное состояние) относительно вертикальной оси поворота, создавая вращательный момент вокруг вертикальной оси поворота, образующий помехи. Для максимального увеличения рабочего диапазона по вертикальной оси поворота желательно поместить холостой шкив 1140 и направляющий шкив 1142 достаточно близко друг к другу. На самом деле, поскольку ведомая проволока 1252 проходит между холостым шкивом 1140 и направляющим шкивом 1142, между ними должен существовать некоторый зазор. Кроме того, зазор между участками этих шкивов (за исключением фланцев на верхних и нижних поверхностях), вокруг которых наматывается ведомая проволока 1252, может иметь размер, в 1-2 раза превышающий толщину ведомой проволоки 1252.
Если рабочий диапазон по вертикальной оси поворота не требует увеличения, тогда холостой шкив 1140 и направляющий шкив 1142 могут быть соответствующим образом разнесены друг от друга. Даже если имеется изгиб по вертикальной оси поворота, конечное исполнительное звено 1104 может быть раскрыто и закрыто путем управления спусковым рычагом 1032, так чтобы ведомая проволока 1252 привела в действие ведомый шкив 1156.
Поскольку управление по вертикальной оси поворота и управление по оси ротации не приводят к механическим помехам в плане управления по раскрытию и закрытию конечного исполнительного звена 1104, приводной механизм рабочего блока 1012а дистального конца для приведения в действие конечного исполнительного звена 1104 не требует никакого корректирующего средства для компенсации помех или корректирующего средства иного типа (например, корректирующих приводов и вспомогательных механизмов), включающих в себя механизмы и приводы. Таким образом, медицинский манипулятор 1010 по своей конструкции прост и имеет малый вес. Управляющие усилия, приложенные к спусковому рычагу 1032, могут эффективно передаваться на конечное исполнительное звено 1104, не воздействуя на другие приводные системы. Вследствие этого конечное исполнительное звено 1104 может создавать большие усилия по захвату (или отслаиванию). В виду того что медицинский манипулятор 1010 обладает малым весом, хирург может снизить усилие, необходимое для поддерживания медицинского манипулятора 1010. В результате медицинский манипулятор 1010 дает возможность хирургу выполнять приемы надлежащим образом на длительном временном интервале, а также лучше ощущать усилия, с которыми шовная игла вводится в ткань, и силу противодействия ткани.
Медицинский манипулятор 1010 экономит энергию, т.к. конечное исполнительное звено 1104 может раскрываться и закрываться вручную посредством спускового рычага 1032.
Может использоваться многозвенный механизм, обратный вышеописанному многозвенному механизму, так чтобы конечное исполнительное звено 1104 было закрыто, когда оно не управляется вручную. В этом случае конечное исполнительное звено 1104 может раскрываться, когда спусковой рычаг 1032 отжат. Обратный многозвенный механизм может быть таким, что закрытое состояние конечного исполнительного звена 1104, т.е. состояние, при котором второе захватное приспособление 1212 накладывается на первое захватное приспособление 1202, как показано, например, на Фигуре 22, является исходным состоянием. При отжатии спускового рычага 1032 в исходном состоянии второе захватное приспособление 1212 поворачивается против часовой стрелки и пространственно отделяется от первого захватного приспособления 1202, тем самым раскрывая конечное исполнительное звено 1104.
В ходе хирургических операций может потребоваться большое усилие по отслаиванию в направлении (направлении отслаивания) раскрытия конечного исполнительного звена 1104 с целью отслаивания ткани. Если действие по оттягиванию спускового рычага 1032 непосредственно передается на конечное исполнительное звено 1104 через обратную многозвенную конструкцию, то можно создать большое усилие по отслаиванию.
В этом случае в медицинском манипуляторе 1010 усилия в направлении раскрытия конечного исполнительного звена 1104 передаются на спусковой рычаг 1032. Другими словами, когда конечное исполнительное звено 1104 раскрывается и упирается в живую ткань, хирургический инструмент и т.п. в направлении раскрытия, спусковой рычаг 1032 не может перемещаться в направлении Z1. Хирург, таким образом, может ощутить, что конечное исполнительное звено 1104 во что-то уперлось.
Поскольку различие между вертикальной осью поворота и горизонтальной осью поворота рабочего блока 1012 дистального конца представляет начальное пространственное положение или относительное положение в отношении функционального блока, вертикальная ось поворота может быть заменена на горизонтальную ось поворота. Поэтому рабочий блок 1012 дистального конца может иметь вертикальную ось поворота и горизонтальную ось поворота. Оси угловой ориентации (соответствующие вертикальной оси поворота и оси ротации на рабочем блоке 1012 дистального конца) могут активироваться, например, с использованием стержней, звеньев, трубчатых валов и т.п., или любым их сочетанием, а не посредством проволок (гибких звеньев) или зубчатых колес.
Холостой шкив 1140, направляющий шкив 1142 и ведомый шкив 1156 не обязательно должны представлять собой шкивы, но могут содержать цилиндрические тела (цилиндрические звенья), на которые может наматываться проволока, если они обеспечивают на себе скольжение гибкого звена. Цилиндрические тела следует понимать в широком смысле, и они включают в себя полые цилиндрические тела и дугообразные столбчатые тела. Если угол рабочего диапазона шкива мал согласно расчетным условиям, тогда проволока может наматываться менее чем на один оборот вокруг шкива. В этом случае шкив может представлять собой дугообразное столбчатое тело. Если ведомый шкив 1156 не может вращаться относительно пальца 1154 (ведомый шкив 1156 закреплен на стержне 1152), тогда, поскольку ведомая проволока 1252 не удерживается в упор с полудуговым участком ведомого шкива 1156, более близким к направляющему шкиву (в направлении Z2), полудуговой участок ведомого шкива 1156 не требуется и, следовательно, ведомый шкив 1156 может быть выполнен в форме цилиндрического тела, имеющего полудуговой участок лишь ближе к его дистальному концу. Таким же образом, если реверсивный шкив 1350 имеет участок, не составляющий упор для ведомой проволоки 1252, тогда реверсивный шкив 1350 может представлять собой частично дугообразное цилиндрическое тело, тем самым обеспечивая возможность сократить по длине комбинированный механизм 1102.
Модификации соединения на конце ведомой проволоки 1252, соответствующего концевому звену 1250, будут описаны ниже со ссылками на Фигуры 26-31.
Согласно первой модификации принципа действия соединения на конце ведомой проволоки 1252, как показано на Фигуре 26, оба конца ведомой проволоки 1252 введены в отверстие на дистальном конце трубки (ведущего звена) 1400 и участок 1402, проксимальный к отверстию на дистальном конце, обжат, так чтобы запрессовать введенные концы. Таким образом, ведомая проволока 1252 может быть легко закреплена на месте.
Согласно второй модификации принципа действия соединения на конце ведомой проволоки 1252, как показано на Фигуре 27, трубка 1406 заходит по резьбе в дистальный конец стержня (ведущего звена) 1404. Так же, как в трубке 1400, показанной на Фигуре 26, в трубке 1406 запрессованы оба конца ведомой проволоки 1252. Таким образом, в данной схеме стержень 1404 и трубка 1406 разъемно соединены друг с другом, что облегчает сборку и техническое обслуживание. Подобное резьбовое зацепление позволяет трубке 1406 выступать регулируемым образом из стержня 1404 для регулирования длины и натяжения ведомой проволоки 1252. Трубка 1406 может дополнительно крепиться конструкцией из сдвоенных гаек.
Согласно третьей модификации принципа действия соединения на конце ведомой проволоки 1252, как показано на Фигурах 28 и 29, ведомая проволока 1252 введена через отверстие 1410, образованное на дистальном конце стержня (ведущего звена) 1408. Отверстие 1410 имеет дугообразную стенку 1410а, обращенную в направлении Z2, которая входит в зацепление с ведомой проволокой 1252. Ведомая проволока 1252 скользит по дугообразной стенке 1410а. Когда стержень 1408 оттягивается в направлении Z2, ведомая проволока 1252 натягивается в X-направлении, сохраняя хорошее равновесие.
У ведомой проволоки 1252, содержащей единственную проволоку, оба конца крепятся к крепежному элементу 1412, а потому она имеет форму кольца. Крепежный элемент 1412 располагается в местоположении, отличном от местоположения соединения со стержнем 1408 как ведущим звеном, и позволяет регулировать длину и натяжение ведомой проволоки 1252. Таким образом, третья модификация проста по конструкции.
Согласно четвертой модификации принципа действия соединения на конце ведомой проволоки 1252, как показано на Фигурах 30 и 31, на участке 1414а дистального конца стержня (ведущего звена) 1414 установлен ролик 1416, и ведомая проволока 1252 намотана вокруг ролика 1416. Ролик 1416 поддерживается с возможностью вращения на пальце 1418. Ведомая проволока 1252, поскольку она намотана на ролик 1416, способна совершать возвратно-поступательное перемещение. Когда стержень 1414 оттягивается в направлении Z2, ведомая проволока 1252 может натягиваться в X-направлении, сохраняя хорошее равновесие, даже если отсутствует изгиб по вертикальной оси поворота. Участок 1414а дистального конца входит по резьбе в стержень 1414. Согласно четвертой модификации парные отрезки ведомой проволоки 1252, разнесенные в Y-направлении, подвергаются растяжению равномерно, так чтобы увеличить срок службы ведомой проволоки 1252 и сделать парные верхний и нижний отрезки ведомой проволоки 1252 параллельными друг другу.
Поскольку парные отрезки ведомой проволоки 1252, разнесенные в Y-направлении, параллельны друг другу, стержень 1414 может располагаться близко к рабочему блоку 1012а дистального конца, тем самым укорачивая ведомую проволоку 1252 и снижая удлинение ведомой проволоки 1252, так чтобы повысить быстроту ее реакции.
Ниже будет описан рабочий блок 1012b дистального конца согласно второму примеру конструкции. Части рабочего блока 1012b дистального конца (также как рабочих блоков 1012с-1012f дистального конца), идентичные частям рабочего блока 1012а дистального конца, будут обозначаться теми же номерами позиций, а их признаки подробно описываться не будут.
Как показано на Фигуре 32, рабочий блок 1012b дистального конца имеет конструкцию, схожую с конструкцией рабочего блока 1012а дистального конца, за исключением того что холостой шкив 1140 (см. Фигуру 21) отсутствует. В рабочем блоке 1012b дистального конца ведомая проволока 1252 намотана на один или несколько оборотов вокруг направляющего шкива 1142 с двух сторон. А именно, ведомая проволока 1252 намотана вокруг направляющего шкива 1236 первого ряда со стороны X2 и намотана вокруг направляющего шкива 1238 второго ряда со стороны X1. Рабочий блок 1012b дистального конца работает таким же образом, как и рабочий блок 1012а дистального конца. Когда ведомая проволока 1252 оттягивается в направлении Z2, направляющий шкив 1142 и ведомый шкив 1156 приходят в движение по управлению конечным исполнительным звеном 1104, а также по управлению конечным исполнительным звеном 1104 в направлениях движения рыскания при повороте вокруг вала 1112 (см. воображаемые линии на Фигуре 32). Если рабочий диапазон по вертикальной оси поворота предполагает поворот в одну сторону (от 0° до 90°), тогда только один отрезок ведомой проволоки 1252 может быть намотан на один или несколько оборотов вокруг направляющего шкива 1142. Например, см. Фигуру 32, для управления конечным исполнительным звеном 1104 лишь в одном направлении, показанном стрелкой А, вокруг вертикальной оси поворота, виток 1253 ведомой проволоки 1252, намотанный вокруг направляющего шкива 1236 первого ряда в направлении X1, не требуется. Ведомая проволока 1252 может удерживаться лишь у поверхности направляющего шкива 1236 первого ряда, обращенной в направлении X2.
Рабочий блок 1012b дистального конца имеет более простую конструкцию, чем рабочий блок 1012а дистального конца, поскольку не требует холостого шкива 1140. С другой стороны, в случае рабочего блока 1012а дистального конца длина ведомой проволоки 1252, намотанной вокруг направляющего шкива 1142, укорочена для создания меньшего трения, и общая длина ведомой проволоки 1252 меньше, чем в случае рабочего блока 1012b дистального конца. Поскольку количество витков вокруг направляющего шкива 1142 меньше, направляющий шкив 1142 может быть тоньше. Вопрос об использовании рабочего блока 1012а дистального конца или рабочего блока 1012b дистального конца может решаться в зависимости от расчетных условий.
Конструкции, показанные на Фигурах 26-32, также применимы к рабочим блокам 1012с-1012f дистального конца, которые будут описаны ниже.
Ниже будет описан рабочий блок 1012с дистального конца согласно третьему примеру конструкции.
Как показано на Фигуре 33, рабочий блок 1012с дистального конца отличается от рабочего блока 1012а дистального конца в аспекте конструкции конечного исполнительного звена 1104.
Рабочий блок 1012с дистального конца включает в себя конечное исполнительное звено 1300, имеющее конструкцию с двухсторонним раскрытием, с парой захватных приспособлений 1302, способных на нем перемещаться. Конечное исполнительное звено 1300 содержит основание 1304 захвата, образующее единое целое с кожухом 1160, пару элементов 1308 конечного исполнительного звена, способных перемещаться вокруг пальца 1196, установленного на основании 1304 захвата, а также пару звеньев 1220 захвата.
Каждый из элементов 1308 конечного исполнительного звена имеет L-образную форму, схожую со вторым элементом 1192 конечного исполнительного звена, и содержит захватное приспособление 1302, продолжающееся в направлении Z1, и рычаг 1310, изогнутый под углом примерно 35° и продолжающийся от захватного приспособления 1302. L-образный изогнутый угол включает в себя отверстие 1216, образованное в нем, при этом палец 1196 вводится в отверстие 1216, так чтобы элементы 1308 конечного исполнительного звена могли совершать качание вокруг третьей вращательной оси 0g.
Каждый из элементов 1308 конечного исполнительного звена соединен с пальцем 1224 на ведомой пластине 1158 с помощью одностороннего звена 1220 захвата. Ведомая пластина 1158 имеет два соединительных отверстия 1172, расположенных симметрично относительно Y-направления на Фигуре 33. Звенья 1220 захвата пересекают друг друга, если смотреть сбоку.
Механизм 1100 с проволочным приводом и комбинированный механизм 1102, отличные от конечного исполнительного звена 1300 рабочего блока 1012с дистального конца, идентичны по конструкции тем же механизмам рабочего блока 1012а дистального конца, которые описаны выше.
Поскольку захватные приспособления 1302 расположены в противостоящих положениях, рабочий блок 1012с дистального конца способен создавать хорошо сбалансированные усилия, не прикладывая самопроизвольных моментных нагрузок.
Как показано на Фигурах 33 и 34, элементы 1308 конечного исполнительного звена приводятся в действие главным образом синхронно в ответ на действия стержня 1152. Таким образом, элементы 1308 конечного исполнительного звена могут раскрываться и закрываться симметрично относительно центральной оси.
Как показано на Фигуре 35, когда конечное исполнительное звено 1300 перемещается вокруг вертикальной оси поворота, поскольку механизм работы по вертикальной оси поворота и механизм для приведения в действие конечного исполнительного звена 1300 не создают помех друг на друга, степень раскрытия конечного исполнительного звена 1300 не изменяется. Наоборот, когда конечное исполнительное звено 1300 раскрывается и закрывается, конечное исполнительное звено 1300 не перемещается вокруг вертикальной оси поворота или оси ротации.
Поскольку конечное исполнительное звено 1300 механически присоединено непосредственно к спусковому рычагу 1032, конечное исполнительное звено 1300 создает большие захватные усилия, при этом усилия, прикладываемые к конечному исполнительному звену 1300, передаются на спусковой рычаг 1032.
Ниже будет описан рабочий блок 1012d дистального конца согласно четвертому примеру конструкции. В рабочих блоках 1012а-1012c дистального конца, описанных выше, спусковой рычаг 1032 активно отжимается (т.е. захватные приспособления закрываются/раскрываются) за счет ручного усилия, при этом спусковой рычаг 1032 пассивно возвращается за счет усилия пружины 1150, так что усилие прикладывается лишь в одном направлении для раскрывания/закрывания захватных приспособлений. В случае рабочего блока 1012d дистального конца согласно четвертому примеру конструкции (также как в случае рабочего блока 1012е дистального конца), ручное усилие активно прикладывается для отжатия и возврата спускового рычага 1032, посредством чего усилие прикладывается в обоих направлениях. Пружина 1150 для генерирования усилий устранена. Рабочий блок 1012d дистального конца может использоваться в качестве захватных щипцов и щипцов для отслаивания.
Как показано на Фигуре 36, рабочий блок 1012d дистального конца включает в себя два механизма, а именно первый механизм 1320а привода конечного исполнительного звена и второй механизм 1320b привода конечного исполнительного звена, соответствующие механизму 1260 привода конечного исполнительного звена (см. Фигуру 22). Составляющие первого механизма 1320а привода конечного исполнительного звена обозначаются номерами позиций с добавлением символа «а», а составляющие второго механизма 1320b привода конечного исполнительного звена обозначаются номерами позиций с добавлением символа «b», чтобы их можно было отличить друг от друга. На Фигурах 36 и 37 (также как на Фигурах 52 и 53) первый механизм 1320а привода конечного исполнительного звена и второй механизм 1320b привода конечного исполнительного звена показаны на чертежах параллельными друг другу, чтобы облегчить понимание. Если рабочий блок 1012d дистального конца введен в состав медицинского манипулятора 1010 как такового, тогда, как показано на Фигуре 38 (и Фигуре 51), шкивы располагаются рядом по оси (а именно в Y-направлении), так что вращательные валы холостых шкивов (цилиндрических звеньев, передающих звеньев) 1140а, 1140b располагаются по одной оси друг с другом и вращательные валы направляющих шкивов (цилиндрических звеньев, передающих звеньев) 1142а, 1142b также располагаются по одной оси друг с другом. Другими словами, холостые шкивы 1140а, 1140b, в общем, поддерживаются на валу 1110 (см. Фигуру 38), в то время как направляющие шкивы 1142а, 1142b, в общем, поддерживаются на валу 1112. Направляющие шкивы 1142а, 1142b, расположенные по одной оси друг с другом, упрощают механизм управления по вертикальной оси поворота.
Рабочий блок 1012d дистального конца содержит первый механизм 1320а привода конечного исполнительного звена, второй механизм 1320b привода конечного исполнительного звена, приводную соединительную проволоку (приводное соединительное гибкое звено, передающее звено) 1322, а также приводной соединительный шкив (цилиндрическое звено, передающее звено) 1324, вокруг которого намотана приводная соединительная проволока 1322. При такой схеме первый механизм 1320а привода конечного исполнительного звена и второй механизм 1320b привода конечного исполнительного звена могут управляться в противофазе, так чтобы легко перемещать приводное звено (передающее звено) 1326а и приводное звено (передающее звено) 1326b в противоположных направлениях.
Хотя и не показано, рабочий блок 1012d дистального конца включает в себя механизм 1100 с проволочным приводом, комбинированный механизм 1102, а также конечное исполнительное звено 1104, идентичные тем, что в рабочем блоке 1012а дистального конца.
Один конец приводной соединительной проволоки 1322 присоединен к проксимальному концу приводного звена 1326а первого механизма 1320а привода конечного исполнительного звена, а другой ее конец присоединен к проксимальному концу приводного звена 1326b второго механизма 1320b привода конечного исполнительного звена. Приводные звенья 1326а и 1326b соответствуют проволоке 1056 и соединены с концевыми звеньями 1250а, 1250b на соответствующих концах ведомых проволок 1252а, 1252b. В рабочем блоке 1012d дистального конца приводные звенья 1326а и 1326b могут быть заменены проволоками. В этом случае оба конца приводной соединительной проволоки 1322 могут непосредственно присоединяться к концевым звеньям 1250а, 1250b.
Один конец второго звена 1066 (см. Фигуру 22) соединен с приводным звеном 1326а, которое может совершать возвратно-поступательное перемещение посредством спускового рычага 1032. Поскольку приводная соединительная проволока 1322 и приводное звено 1326b присоединены к приводному звену 1326а c огибанием приводного соединительного шкива 1324, приводное звено 1326а и приводное звено 1326b совершают возвратно-поступательные перемещения в противоположных направлениях, когда совершает возвратно-поступательное перемещение второе звено 1066.
Спусковой рычаг 1032 может приводить в действие приводное звено 1326а и приводное звено 1326b посредством механизма реечной передачи, который включает в себя рейку, установленную на втором звене 1066, и шестерню, установленную на шкиве 1324 приводного соединения. Приводной соединительный шкив 1324 может располагаться в рабочем блоке 1012d дистального конца (т.е. на дистальном конце соединительного стержня 1048) или может располагаться в функциональном блоке 1014.
Рабочий блок 1012d дистального конца также включает в себя ведомую соединительную проволоку (ведомое соединительное гибкое звено, передающее звено) 1328, один конец которой присоединен к ведомому шкиву (гибкому звену, передающему звену) 1156а первого механизма 1320а привода конечного исполнительного звена, а другой конец присоединен к ведомому шкиву (гибкому звену, передающему звену) 1156b второго механизма 1320b привода конечного исполнительного звена, а также ведомый соединительный шкив (цилиндрическое звено, передающее звено) 1330, вокруг которого намотана ведомая соединительная проволока 1328. При такой схеме первый механизм 1320а привода конечного исполнительного звена и второй механизм 1320b привода конечного исполнительного звена могут управляться в противофазе, так чтобы стержень 1152 совершал возвратно-поступательное перемещение.
Каждый из ведомых шкивов 1156а и 1156b удерживается с возможностью вращения стержнем 1152. Стержень 1152 может крепиться к линейному участку ведомой соединительной проволоки 1328. Стержень 1152 может также присоединяться к ведомому соединительному шкиву 1330 с помощью механизма реечной передачи. Другими словами, стержень 1152 может вызывать возвратно-поступательное перемещение ведомых шкивов 1156а, 1156b или ведомой соединительной проволоки 1328.
Если приводная соединительная проволока 1322 и ведомая соединительная проволока 1328 находятся в состоянии начального растяжения на уровне включения (ON) или выше и выполнены свободными от провисания, различные части рабочего блока дистального конца не будут иметь люфтов, и рабочий блок дистального конца может захватывать объект с высокой оперативностью.
Как показано на Фигуре 36, когда спусковой рычаг 1032 полностью отжат рукой, приводное звено 1326а натягивает ведомую проволоку 1252а для перемещения ведомого шкива 1156а и стержня 1152 в направлении Z2, что приводит к закрыванию конечного исполнительного звена 1104. Другими словами, конечное исполнительное звено 1104 закрывается путем оттягивания передающих звеньев, в том числе приводного звена 1326а, ведомой проволоки 1252а и ведомого шкива 1156а. Во втором механизме 1320b привода конечного исполнительного звена, поскольку приводное звено 1326b расположено так, что оно выталкивается наружу, приводное звено 1326b не препятствует работе стержня 1152. Поскольку ведомая проволока 1252b создает только усилия растяжения (т.е. ведомая проволока 1252b не передает усилий сжатия), ведомая проволока 1252b практически не вносит вклад в передачу мощности.
На этом этапе, когда конечное исполнительное звено 1104 захватывает объект W, ведомая проволока 1252, приводное звено 1326 и спусковой рычаг 1032 не могут перемещаться далее в направлении Z2, тем самым позволяя хирургу почувствовать кончиками пальцев, что конечное исполнительное звено 1104 захватило объект W. Хирург также может ощутить твердость объекта W. Эти действия можно легко понять, обратившись к Фигурам 36 и 24, т.к. рабочий блок 1012а дистального конца, как показано на Фигуре 24, по существу такой же, как рабочий блок 1012d дистального конца, показанный на Фигуре 36, хотя второй механизм 1320b привода конечного исполнительного звена отсутствует.
Как показано на Фигуре 37, когда спусковой рычаг 1032 полностью вытолкнут рукой, приводная соединительная проволока 1322 перемещается против часовой стрелки на Фигуре 37 и приводное звено 1326b натягивает ведомую проволоку 1252b для перемещения ведомого шкива 1156b в направлении Z2. Ведомая соединительная проволока 1328 перемещается по направлению против часовой стрелки, а стержень 1152 и ведомый шкив 1156а перемещаются в направлении Z1 по направлению к дистальному концу, что приводит к раскрыванию конечного исполнительного звена 1104.
Поскольку усилия для проталкивания спускового рычага 1032 рукой механически и непосредственно передаются на конечное исполнительное звено 1104 вторым механизмом 1320b привода конечного исполнительного звена, конечное исполнительное звено 1104 может раскрываться с требуемой силой, а не с заданной силой как от упругого тела. Таким образом, используя наружную боковую поверхность конечного исполнительного звена 1104, рабочий блок дистального конца может быть должным образом использован для выполнения технических приемов по отслаиванию живой ткани или для раскрытия отверстия.
Когда объект W приходит в соприкосновение с наружной боковой поверхностью конечного исполнительного звена 1104, ведомая проволока 1252b, приводное звено 1326b и спусковой рычаг 1032 более не могут перемещаться в направлении Z1, тем самым позволяя хирургу почувствовать кончиками пальцев, что наружная боковая поверхность конечного исполнительного звена 1104 соприкоснулась с объектом W. Хирург также может ощутить твердость объекта W.
Рабочий блок 1012d дистального конца может работать по вертикальной оси поворота и оси ротации, таким же образом как рабочий блок 1012а дистального конца. Хотя и не показано, когда рабочий блок 1012d дистального конца работает по вертикальной оси поворота, комбинированный механизм 1102 и конечное исполнительное звено 1104, которые ближе к дистальному концу, чем валы (см. Фигуру 38) направляющих шкивов 1142а и 1042b, совершают качание в направлениях движения рыскания вокруг валов направляющих шкивов 1142а и 1042b. Поскольку рабочий блок 1012d дистального конца образует механизм, не вносящий помех, также как рабочий блок 1012а дистального конца, то, когда рабочий блок 1012d дистального конца работает по вертикальной оси поворота, степень раскрытия конечного исполнительного звена 1104 остается неизменной. Наоборот, когда степень раскрытия конечного исполнительного звена 1104 изменяется, вертикальная ось поворота не работает. Конечное исполнительное звено 1104 и ось ротации связаны между собой таким же образом.
В рабочем блоке 1012d дистального конца (также как в рабочем блоке 1012е дистального конца) пружина 1150 не требуется. В зависимости от расчетных условий пружина 1150 может обеспечиваться для смещения стержня 1152 для движения либо в направлении дистального конца, либо проксимального конца. Такая схема делает возможным удерживание конечного исполнительного звена раскрытым или закрытым, когда спусковым рычагом 1032 не управляют. Если в рабочем блоке 1012d дистального конца нет достаточного пространства, тогда пружину 1150 можно также разместить на спусковом рычаге 1032.
Как показано на Фигуре 38, в рабочем блоке 1012d дистального конца холостые шкивы 1140а, 1140b имеют соответствующие внешние холостые шкивы 1232а, 1232b первого ряда, соосные друг другу, а также соответствующие внутренние холостые шкивы 1234а, 1234b второго ряда, также соосные друг другу. Направляющие шкивы 1142а, 1142b имеют соответствующие внешние направляющие шкивы 1236а, 1236b первого ряда, соосные друг другу, а также соответствующие внутренние направляющие шкивы 1238а, 1238b второго ряда, также соосные друг другу. Такая конструкция схожа с конструкцией, показанной на Фигуре 21, что позволяет парным шкивам вращаться в противоположных направлениях, способствуя плавной работе.
Как показано на Фигуре 39, внутренние холостые шкивы 1234а, 1234b второго ряда могут быть выполнены как единое целое друг с другом, совместно образуя центральный типовой холостой шкив 1430. Внутренние направляющие шкивы 1238а, 1238b второго ряда могут быть выполнены как единое целое друг с другом, совместно образуя центральный типовой направляющий шкив 1432.
А именно, поскольку приводные звенья 1326а и 1326b перемещаются на одинаковое расстояние в противоположных направлениях, проволоки перемещаются так, как показано стрелками на Фигуре 39, тем самым поворачивая холостой шкив 1234а второго ряда и холостой шкив 1234b второго ряда на одинаковый угол и в одном направлении (по часовой стрелке на Фигуре 39) и при этом также поворачивая направляющий шкив 1238а второго ряда и направляющий шкив 1238b второго ряда на одинаковый угол и в одном направлении (против часовой стрелки на Фигуре 39). Таким образом, подобные звенья не требуется размещать отдельно, и они могут составлять единый центральный типовой холостой шкив 1430 и единый центральный типовой направляющий шкив 1432, которые имеют простую конструкцию. На Фигуре 39 направляющий шкив 1238а второго ряда и направляющий шкив 1238b второго ряда показаны как незначительно разнесенные друг от друга, при этом холостой шкив 1234а второго ряда и холостой шкив 1234b второго ряда также показаны как незначительно разнесенные друг от друга, чтобы облегчить понимание. Однако расстояние между ними по существу может быть равным нулю.
Механизмы 1440а-1440d подачи и возврата приводных звеньев, согласно примерам с первого по четвертый, для перемещения первого механизма 1320а привода конечного исполнительного звена и второго механизма 1320b привода конечного исполнительного звена по существу на одинаковое расстояние, но в противоположных направлениях будут описаны ниже со ссылками на Фигуры 40-43.
Как показано на Фигуре 40, механизм 1440а подачи и возврата приводных звеньев согласно первому примеру содержит рычаг 1444, способный поворачиваться вокруг шарнирной оси 1442, вращательное звено 1446а зацепления, которое расположено на незначительном расстоянии от шарнирной оси 1442 в направлении Y1, а также вращательное звено 1446b зацепления, которое расположено на незначительном расстоянии от шарнирной оси 1442 в направлении Y2. Расстояния от шарнирной оси 1442 до двух вращательных звеньев 1446а, 1446b зацепления по существу равны между собой. Приводное звено 1326а имеет проксимальный конец, зацепленный с возможностью вращения с вращательным звеном 1446а зацепления. Приводное звено 1326b имеет проксимальный конец, зацепленный с возможностью вращения с вращательным звеном 1446b зацепления.
Рычаг 1444 соответствует первому звену 1064, описанному выше. Спусковой рычаг 1032 установлен на нижнем конце рычага 1444.
Как показано на Фигуре 41, также как в случае механизма 1440а подачи и возврата приводных звеньев, механизм 1440b подачи и возврата приводных звеньев согласно второму примеру содержит рычаг 1444, шарнирную ось 1442, а также вращательные звенья 1446а, 1446b зацепления. Проволока 1448а присоединена к вращательному звену 1446а зацепления, а проволока 1448b присоединена к вращательному звену 1446b зацепления. Другой конец проволоки 1448а присоединен к ведомой проволоке 1252а (см. Фигуру 36) посредством концевого звена 1250а, в то время как другой конец проволоки 1448b присоединен к ведомой проволоке 1252b (см. Фигуру 36) посредством концевого звена 1250b.
Как показано на Фигуре 42, механизм 1440с подачи и возврата приводных звеньев согласно третьему примеру содержит рычаг 1444, вращательное рабочее звено 1450, закрепленное на рычаге 1444, проволоку 1452, намотанную вокруг вращательного рабочего звена 1450, крепежное звено 1454, закрепляющее участок проволоки 1452 на вращательном рабочем звене 1450, а также свободно вращающийся элемент 1456, удерживаемый вплотную с участком проволоки 1452 вблизи вращательного рабочего звена 1450. Вращательное рабочее звено 1450 выполнено в форме тонкого цилиндрического тела и работает как шкив. А именно, проволока 1452 имеет участок 1452а, удерживаемый в соприкосновении с верхним участком вращательного рабочего звена 1450, а также свой другой участок 1452b, удерживаемый в соприкосновении с участком вращательного рабочего звена 1450, обращенным в направлении Y2.
Вращательное рабочее звено 1450 вращается совместно с рычагом 1444 вокруг шарнирной оси 1442. Участок 1452а проволоки 1452 от крепежного звена 1454 присоединен к ведомой проволоке 1252а (см. Фигуру 36) посредством концевого звена 1250а. Другой участок 1452b проволоки 1452 присоединен к ведомой проволоке 1252b (см. Фигуру 36) посредством концевого звена 1250b.
Вращательное рабочее звено 1450 имеет достаточно большой диаметр, так чтобы быть способным в полной мере натягивать ведомую проволоку 1252а и ведомую проволоку 1252b. Крепежное звено 1454 расположено в таком положении, чтобы не препятствовать подаче проволоки 1452 назад и вперед.
Свободно вращающийся элемент 1456 удерживается вплотную к проволоке 1452, тем самым определяя расположение и траекторию движения проволоки 1452 через полую область 1048а в соединительном стержне 1048 для удерживания участков 1452а, 1452b проволоки 1452 близко друг к другу. Свободно вращающийся элемент 1456 может одновременно служить натяжным приспособлением для проволоки 1452.
Как показано на Фигуре 43, механизм 1440d подачи и возврата приводных звеньев согласно четвертому примеру содержит рычаг 1444, вращательное рабочее звено 1450, проволоку 1460, крепежное звено 1454, а также свободно вращающийся элемент 1456. Проволока 1460 имеет дистальный конец, присоединенный к проксимальному концу приводного звена 1326а, а также участок проксимального конца, намотанный вокруг верхнего участка вращательного рабочего звена 1450. Проксимальный конец закреплен на вращательном рабочем звене 1450 с помощью крепежного звена 1454. Свободно вращающийся элемент 1456 размещен в зацеплении с проволокой 1460 для определения расположения и траектории движения проволоки 1460 и приводного звена 1326а.
Проксимальный конец приводного звена 1326b поддерживается с возможностью вращения на нижнем звене 1464 зацепления вращательного рабочего звена 1450. Рычаг 1444 имеет вытянутое отверстие 1064а, образованное в нем для направляющего воздействия на нижнее звено 1464 зацепления. Приводное звено 1326а и приводное звено 1326b поддерживаются для совершения возвратно-поступательных перемещений в Z-направлении посредством направляющих 1462а, 1462b.
Механизмы 1440а-1440d подачи и возврата приводных звеньев делают возможным перемещения первого механизма 1320а привода конечного исполнительного звена и второго механизма 1320b привода конечного исполнительного звена по существу на одинаковое расстояние в противоположных направлениях. Механизмы 1440а-1440d подачи и возврата приводных звеньев могут также быть приложены к рабочему блоку 1012е дистального конца, как будет описано ниже.
Ниже будет описан рабочий блок 1012е дистального конца согласно пятому примеру конструкции. Рабочий блок 1012е дистального конца включает в себя первый механизм 1340а привода конечного исполнительного звена и второй механизм 1340b привода конечного исполнительного звена.
Как показано на Фигурах 44, 45, 46 и 47, первый механизм 1340а привода конечного исполнительного звена по существу такой же, как вышеописанный первый механизм 1320а привода конечного исполнительного звена (см. Фигуру 36). Второй механизм 1340b привода конечного исполнительного звена отличается от второго механизма 1320b привода конечного исполнительного звена (см. Фигуру 36), описанного выше, тем, что к нему добавлен возвратный шкив (цилиндрическое звено, передающее звено) 1350, а ведомая соединительная проволока 1328 и ведомый соединительный шкив 1330 устранены. Ведомый шкив 1156а и ведомый шкив 1156b расположены соосно.
Главный вал 1144 имеет диаметральное отверстие 1354, образованное в нем, с пальцем 1352, введенным в него и закрепленным в нем. Отверстие 1354 проходит через втулку главного вала 1144 через отверстие 1144а.
Стержень (передающее звено) 1152 имеет удлиненное отверстие 1356, образованное в нем, которое продолжается по оси и имеет ширину, достаточную для того, чтобы позволить через него ввести палец 1352. Стержень 1152 расположен в положении, незначительно смещенном от оси рабочего блока 1016 в направлении Y1. Выступ 1174 на дистальном конце расположен по оси (см. Фигуру 22). Однако стержень 1152 может быть также расположен по центру.
Также как в случае ведомого шкива 1156 (см. Фигуру 20), ведомый шкив 1156а поддерживается с возможностью вращения с помощью пальца 1154 на конце стержня 1152 в направлении Z2. Палец 1154 проходит сквозь стержень 1152 и выступает в направлении Y2, при этом на выступающем его конце поддерживается ведомый шкив 1156b. Ведомый шкив 1156b имеет толщину, достаточную для поддержания двух оборотов ведомой проволоки 1252b. Отверстие 1144а имеет высоту, достаточную для того, чтобы ведомые шкивы 1156а, 1156b и стержень 1152 могли быть в него введены. Ведомые шкивы 1156а, 1156b соосно поддерживаются с помощью пальца 1154 в отверстии 1144а для независимого вращения.
В пределах отверстия 1144а палец 1352 вводится в удлиненное отверстие 1356 и в центральное отверстие в возвратном шкиве 1350 со стороны направления Y1 в направлении Y2, что позволяет стержню 1152 и ведомым шкивам 1156а, 1156b совершать возвратно-поступательное перемещение по оси. Возвратный шкив 1350 поддерживается с возможностью вращения при помощи пальца 1352, закреплен на своем месте и имеет толщину, достаточную для поддержания двух оборотов ведомой проволоки 1252b. Если возвратный шкив 1350 имеет двухрядную конструкцию, тогда возвратный шкив 1350 может вращаться в противоположных направлениях при раскрывании и закрывании конечного исполнительного звена, тем самым снижая трение между проволокой и шкивом.
Как показано на Фигурах 48, 49, и 50, во втором механизме 1340b привода конечного исполнительного звена возвратный шкив 1350 расположен ближе к дистальному концу, чем ведомый шкив 1156b, при этом ведомая проволока 1252b намотана вокруг ведомого шкива 1156b и возвратного шкива 1350. Другими словами, ведомая проволока 1252b проходит от концевого звена 1250b приводного звена 1326b ведущего звена по стороне холостого шкива 1140b, обращенной в направлении X1, и далее продолжается в направлении X2, проходя по стороне направляющего шкива 1142b, обращенной в направлении X2, и продолжается к поверхности ведомого шкива 1156b, обращенной в направлении X2. Ведомая проволока 1252b продолжается в направлении Z1 к поверхности возвратного шкива 1350, обращенной в направлении X2, совершает половину оборота вокруг поверхности возвратного шкива 1350, обращенной в направлении X1, и возвращается в направлении Z2.
Ведомая проволока 1252b намотана на половину оборота вокруг поверхности ведомого шкива 1156b, обращенной в направлении Z2. Ведомая проволока 1252b проходит по его стороне, обращенной в направлении X2, и снова продолжается к возвратному шкиву 1350. Ведомая проволока 1252b намотана на половину оборота вокруг поверхности возвратного шкива 1350, обращенной в направлении Z1, и возвращается в направлении X2. После этого ведомая проволока 1252b продолжается от стороны направляющего шкива 1142b, обращенной в направлении X1, к стороне холостого шкива 1140b, обращенной в направлении X2, и присоединяется к концевому звену 1250b приводного звена 1326b. Концевое звено 1250 и ведомая проволока 1252b механически соединены со спусковым рычагом 1032 посредством приводного звена 1326b.
Холостой шкив 1140b имеет больший диаметр, чем направляющий шкив 1142b на Фигурах 48, 49 и 50, чтобы зубчатые колеса 1134, 1138 (см. Фигуру 20), расположенные примыкая к направляющему шкиву 1142b, не создавали помех валу 1110, а также для удерживания холостого шкива 1140b и направляющего шкива 1142b рядом друг с другом.
На Фигуре 51 схематично показан рабочий блок 1012е рабочего конца, чтобы облегчить понимание его конструкции.
Как показано на Фигуре 52, когда спусковой рычаг 1032 полностью отжат рукой, стержень 1052 перемещается в направлении Z2 для закрытия конечного исполнительного звена 1300. Здесь работа и преимущества рабочего блока 1012е дистального конца те же, что у рабочих блоков дистального конца на Фигурах 23 и 36, и подобные признаки подробно описываться не будут.
Поскольку ведомый шкив 1156b установлен соосно с ведомым шкивом 1156а, ведомый шкив 1156b смещается совместно с ведомым шкивом 1156а в направлении Z2. Поскольку приводное звено 1326b смещается и выталкивается, ведомая проволока 1252b и приводная соединительная проволока 1322 не провисают. Расстояние между ведомым шкивом 1156b и возвратным шкивом 1350 обозначено через L.
Как показано на Фигуре 53, когда спусковой рычаг 1032 полностью вытолкнут рукой, приводная соединительная проволока 1322 перемещается против часовой стрелки на Фигуре 53, и приводное звено 1326b работает на натягивание ведомой проволоки 1252b. Поскольку участок дистального конца ведомой проволоки 1252b намотан вокруг возвратного шкива 1350, который закреплен на месте, ведомая проволока 1252b целиком не перемещается, и ведомый шкив 1156b перемещается в направлении Z1 в зависимости от расстояния, на которое перемещается приводное звено 1326b, уменьшая тем самым расстояние L. Поскольку расстояние L уменьшается, ведомая проволока 1252а соответственно подается в направлении приводного звена 1326b, которое имеет возможность перемещаться. Ведомый шкив 1156b, таким образом, работает как подвижный шкив, а возвратный шкив 1350 работает как закрепленный шкив.
Поскольку ведомый шкив 1156а установлен соосно с ведомым шкивом 1156b, ведомый шкив 1156а смещается совместно с ведомым шкивом 1156b в направлении Z1, тем самым выталкивая стержень 1152 в направлении Z1 для раскрытия конечного исполнительного звена 1300.
Поскольку усилия для выталкивания спускового рычага 1320 рукой передаются непосредственно и механически на конечное исполнительное звено 1300 посредством второго механизма 1320b привода конечного исполнительного звена, конечное исполнительное звено 1300 может раскрываться с требуемым по величине усилием, а не с заданным усилием, таким как от упругого тела. Таким образом, рабочий блок дистального конца может должным образом использоваться для выполнения технических приемов по отслаиванию живой ткани или для раскрытия отверстия с использованием наружной боковой поверхности конечного исполнительного звена 1300.
Когда объект W приходит в соприкосновение с наружной боковой поверхностью конечного исполнительного звена 1300, ведомая проволока 1252b, приводное звено 1326b и спусковой рычаг 1032 более не перемещаются в направлении Z1, что позволяет хирургу почувствовать кончиками пальцев, что наружная боковая поверхность конечного исполнительного звена 1300 соприкоснулась с объектом W. Хирург также может ощутить твердость объекта W.
Рабочие блоки 1012d, 1012е могут работать по вертикальной оси поворота и по оси ротации так же, как рабочий блок 1012а дистального конца. Хотя и не показано, когда рабочий блок 1012е дистального конца работает по вертикальной оси поворота, комбинированный механизм 1102 и конечное исполнительное звено 1300, которые расположены ближе к дистальному концу, чем валы (см. Фигуру 51) направляющего шкива 1142а и направляющего шкива 1042b, совершают качание вокруг вертикальной оси относительно валов направляющего шкива 1142а и направляющего шкива 1042b. Поскольку рабочий блок 1012е дистального конца представляет собой механизм, не создающий помех, также как в случае рабочего блока 1012а дистального конца, то при работе рабочего блока 1012а дистального конца по вертикальной оси поворота степень раскрытия конечного исполнительного звена 1300 остается неизменной. Наоборот, когда степень раскрытия конечного исполнительного звена 1300 изменяется, вертикальная ось поворота не задействуется. Конечное исполнительное звено 1300 и ось ротации связаны друг с другом таким же образом.
Поскольку ведомые шкивы 1156а, 1156b скользят на одинаковое расстояние и в одном направлении, их можно расположить соосно друг другу, так что рабочий блок 1012е дистального конца обеспечивает размещение и использование пространства с большей эффективностью. Кроме того, рабочий блок 1012е дистального конца образован меньшим количеством деталей, и его легко собрать и технически обслуживать. Поскольку ведомые шкивы 1156а, 1156b скользят совместно друг с другом, достаточно иметь только один блок скольжения. Однако в случае рабочего блока 1012d дистального конца, поскольку ведомые шкивы 1156а, 1156b скользят в противоположных направлениях, требуется два блока скольжения.
Вращательные оси всех шкивов рабочего блока 1012е дистального конца, т.е. холостых шкивов 1140а, 1140b, направляющих шкивов 1142а, 1142b, ведомых шкивов 1156а, 1156b, а также возвратного шкива 1350, расположены параллельно друг другу (в Y-направлениях), и шкивы расположены эффективно без образования мертвого пространства. Однако ведомый соединительный шкив 1330 рабочего блока 1012d дистального конца имеет ось, которая проходит перпендикулярно осям других шкивов.
Рабочий блок 1012е дистального конца не требует ведомой соединительной проволоки 1328 или своего средства проволочного крепления, которые обеспечиваются в рабочем блоке 1012d дистального конца. Рабочий блок 1012е дистального конца имеет более простую конструкцию, поскольку не требует ведомого соединительного шкива 1330 рабочего блока 1012d дистального конца.
Передаточное отношение проволочной передачи рабочего блока 1012е дистального конца, когда конечное исполнительное звено 1300 работает на захват и на раскрытие, составляет 1:1, как и в случае рабочего блока 1012d дистального конца, и хорошо отрегулировано.
В рабочем блоке 1012е дистального конца плоское зубчатое колесо 1165 совместно с зубчатыми колесами 1134, 1138 образуют дифференциальную передачу. Согласно первой модификации, как показано на Фигуре 54, плоское зубчатое колесо 1165 удерживается в зацеплении только с зубчатым колесом 1134, и их участки, соответствующие главному валу 1144 и зубчатому телу 1130 (см. Фигуру 20), могут составлять единую конструкцию. Рабочий блок дистального конца, таким образом, работает по оси ротации на основе действия проволоки 1052 через зубчатое колесо 1134 и работает по вертикальной оси вращения посредством качания главного вала 1144 на основе скоординированного действия проволок 1052, 1054.
Как показано на Фигуре 55, согласно второй модификации рабочего блока 1012е дистального конца используется второй механизм 1340b привода конечного исполнительного звена, имеющий возвратный шкив 1350, а первый механизм 1340а привода конечного исполнительного звена отсутствует. Согласно такой модификации может обеспечиваться пружина 1150 для компенсации действия первого механизма 1340а привода конечного исполнительного звена, который отсутствует. В то время как пружина 1150 в рабочем блоке 1012а дистального конца (см. Фигуру 22) согласно первому примеру конструкции представляет собой пружину сжатия, согласно второй модификации пружина 1150 содержит пружину растяжения для упругого смещения конечного исполнительного звена для самозакрытия. Спусковой рычаг 1032 соединен с приводным звеном 1326а. Согласно модификации, показанной на Фигуре 55, можно обойтись холостым шкивом 1140b. Как и в случае рабочего блока 1012b дистального конца (см. Фигуру 32) согласно второму примеру конструкции, ведомая проволока 1252 может быть намотана на один оборот или более вокруг направляющего шкива 1142b, по меньшей мере, в одном направлении. Если два рабочих блока 1012е дистального конца согласно второму варианту осуществления, показанному на Фигуре 55, параллельно объединены друг с другом, тогда ручные усилия активно передаются при отжатии и возврате спускового рычага 1032, и усилия создаются в обоих направлениях. Следовательно, можно обойтись без пружины 1150 для создания усилий. Рабочий блок дистального конца может использоваться как в качестве щипцов для захвата, так и щипцов для отслаивания.
Хотя рабочий блок 1012е дистального конца содержит конечное исполнительное звено 1300 с двухсторонним раскрытием, рабочий блок 1012е дистального конца может также включать в себя конечное исполнительное звено 1104 с односторонним раскрытием (см. Фигуру 19) или конечное исполнительное звено иного типа.
Рабочие блоки 1012а-1012е дистального конца не ограничиваются вышеописанными конструкциями, но также могут состоять из различных других конструкционных элементов.
Например, как показано на Фигуре 56а, рабочий блок 1012f дистального конца согласно некоторой модификации не включает в себя звенья 1220 захватного приспособления (см. Фигуру 19), а вместо этого ведомая пластина 1158 и рычаг 1214 соединены друг с другом при помощи пальца 1222 и удлиненного отверстия 1360. Палец 1222 крепится к рычагу 1214. Согласно такой модификации, в случае рабочего блока 1012f дистального конца, когда палец 1222 скользит внутри удлиненного отверстия 1360, второе захватное приспособление 1212 поворачивается, так чтобы раскрыть или закрыть конечное исполнительное звено (см. Фигуру 56B). Рабочий блок 1012f дистального конца может быть составлен меньшим количеством деталей, поскольку звено 1220 захватного приспособления и палец 1224 (см. Фигуру 19) устранены.
Рабочий блок 1012f дистального конца включает в себя не создающий помех механизм на основе проволоки и шкивов (а именно комбинированный механизм 1102), который по существу имеет ту же конструкцию, что и рабочий блок 1012f дистального конца, и имеет ту же длину Ls. Длина Lg от пальца 1196, образующего ось захватного приспособления, до дистального конца может быть того же размера, что и у рабочего блока 1012а дистального конца, показанного на Фигуре 19. Длина Lx' соединительного звена от передней поверхности ведомой пластины 1158 до пальца 1196 может быть существенно меньше длины Lx соединительного звена (см. Фигуру 19) рабочего блока 1012а дистального конца, что приводит к снижению общей длины Lt рабочего блока 1012f дистального конца. Соответственно, рабочим блоком 1012f дистального конца можно легко управлять путем изгиба шарнира вертикальной оси поворота в полости 1022 организма, даже если полость 1022 организма мала, что позволяет выполнять операции в более глубоко расположенных и меньших по размеру пространствах. Рабочий блок 1012f дистального конца может применяться в конструкции, в которой два захватных приспособления раскрываются и закрываются, например, в захватных щипцах. Кроме того, линейное перемещение стрежня 1152 может преобразовываться с помощью зубчатых колес во вращательное перемещение для захвата предметов. Конечное исполнительное звено не ограничивается звеном захватного типа, но может содержать поворотные электроды или нечто иное с ножницами или раскрывающийся и закрывающийся блок.
Не создающий помех механизм на основе проволоки и шкивов согласно настоящему варианту осуществления имеет увеличенный рабочий диапазон (например, ±90°) и более компактную конструкцию, чем механизмы традиционного типа (например, “soft mirror type”), в том числе искривленный участок, соответствующий соединительному стержню 1048, и другие не создающие помех механизмы. Таким образом, расстояние от искривленного или изогнутого участка, соответствующего шарниру, до дистального конца может быть уменьшено, обеспечивая тем самым конечному исполнительному звену легкий и не имеющий ограничений доступ в живой организм, а также проведение вмешательств в малом объеме операционного пространства.
Как описано выше, механизмы 1260, 1320а, 1320b, 1340а и 1340b привода конечного исполнительного звена медицинского манипулятора 1010 согласно настоящему варианту осуществления имеют конструкции, не создающие помех по другим осям управления, что позволяет легко создать рабочий блок дистального конца с высокой степенью свободы, а также реализовать большие захватные усилия (или усилия по отслаиванию). Передающие звенья (приводные звенья, проволока 1056 и т.д.), которые механически соединены с управляемым вручную блоком ввода, позволяют хирургу достоверно и легко почувствовать внешние силы, прикладываемые к рабочему блоку 1012 дистального конца. Кроме того, механизмы 1260, 1320а, 1320b, 1340а и 1340b привода конечного исполнительного звена образованы простой конструкцией, в которой отсутствуют зубчатые колеса.
А именно, в медицинском манипуляторе 1010 согласно настоящему варианту осуществления передающие звенья, задействованные в раскрывании и закрывании захватного приспособления, включают в себя ведомую проволоку 1252, содержащую гибкое звено, совместно с направляющим шкивом 1142 и ведомым шкивом 1156, которые образуют цилиндрические звенья, вокруг которых наматывается ведомая проволока 1252. Цилиндрические звенья, вокруг которых наматывается гибкое звено, образованы простой и легковесной конструкцией и могут изменять пространственное положение механизма изменения пространственного положения так, чтобы не затрагивать состояние конечного исполнительного звена.
Иначе говоря, в медицинском манипуляторе 1010 согласно настоящему варианту осуществления направляющий шкив 1142, образующий цилиндрическое звено, обеспечивается в качестве вращательного вала в механизме изменения пространственного положения, а передающие звенья включают в себя ведомую проволоку 1252, образуя гибкое звено, которое частично намотано вокруг направляющего шкива 1142, и конечное исполнительное звено, которое управляется посредством ведомой проволоки 1252. Поскольку используется гибкое звено, которое намотано вокруг цилиндрического звена, медицинский манипулятор имеет простую и малую по весу конструкцию, и конечное исполнительное звено может приводиться в действие посредством гибкого звена. С использованием цилиндрического звена в качестве вращательного вала пространственное положение механизма изменения пространственного положения может изменяться так, чтобы не затрагивать состояние конечного исполнительного звена.
Вышеизложенный вариант осуществления может быть, например, применен в роботизированной хирургической системе 1700, показанной на Фигуре 57.
Роботизированная хирургическая система 1700 включает в себя шарнирно-сочлененную роботизированную руку 1702, а также консоль 1704 с рабочим блоком 1016, присоединенным к дистальному концу роботизированной руки 1702. Дистальный конец роботизированной руки 1702 включает в себя механизм, работающий так же, как медицинский манипулятор 1010. Роботизированная рука 1702 может представлять собой любое средство для перемещения рабочего блока 1016 и не ограничивается установочным типом, а может быть автономного подвижного типа. Консоль 1704 может быть настольного типа, типа панели управления и т.п.
Роботизированная рука 1702 предпочтительно имеет шесть или более независимых соединительных узлов (осей вращения, осей скольжения и т.д.) для требуемой установки положения и ориентации рабочего блока 1016. Медицинский манипулятор 1010 объединен в одно целое с дистальным концом 1708 роботизированной руки 1702. Медицинский манипулятор 1010 включает в себя двигатель 1042 (приводной механизм, сопряженный с управляемым вручную блоком ввода) вместо спускового рычага 1032 (см. Фигуру 22). Двигатель 1042 приводит в действие проволоку 1056 (см. Фигуру 22) или приводной соединительный шкив 1324 (см. Фигуру 36).
Роботизированная рука 1702 работает под управлением консоли 1704 и может автоматически приводиться в действие по программе или приводиться в действие ручками 1706 управления, установленными на консоли 1704, либо совместно программой и ручками 1706 управления. Консоль 1704 включает в себя функции управляющего устройства 1045. Рабочий блок 1016 включает в себя рабочий блок 1012 (1012а-1012f) дистального конца.
Консоль 1704 включает в себя две ручки 1706 управления, служащие средством задания команд, и монитор 1710. Хотя и не показано, две ручки 1706 управления способны индивидуально управлять двумя роботизированными руками 1702. Две ручки 1706 управления расположены в соответствующих положениях, в которых они могут легко управляться обеими руками хирурга. На мониторе 1710 отображается информация, такая как образ, создаваемый регулируемым зеркалом (“soft mirror”).
Ручки 1706 управления могут перемещаться по вертикали и по горизонтали, поддаются кручению и принимают наклонное положение. Роботизированная рука 1702 может перемещаться в зависимости от перемещений ручек 1706 управления. Ручки 1706 управления могут быть задающими руками. Средство связи между роботизированной рукой 1702 и консолью включает в себя кабельную систему, беспроводную систему, сетевую систему, а также их сочетание.
Ручки 1706 управления имеют соответствующие спусковые рычаги 1032, выполненные с возможностью пуска двигателя 1042.
Медицинский манипулятор не ограничивается манипулятором типа щипцов, но может представлять собой ножницы, устройство для завязывания узлов, иглодержатель либо нож, такой как электрохирургический нож, ультразвуковой нож, лазерный нож и т.п. Медицинский манипулятор не ограничивается манипулятором, используемым при выполнении лапароскопических вмешательств.
Медицинский манипулятор по настоящему изобретению не ограничен вышеописанными вариантами осуществления и может включать в себя любую из различных дополнительных и/или модифицированных конструкций без отхода от сущности настоящего изобретения.
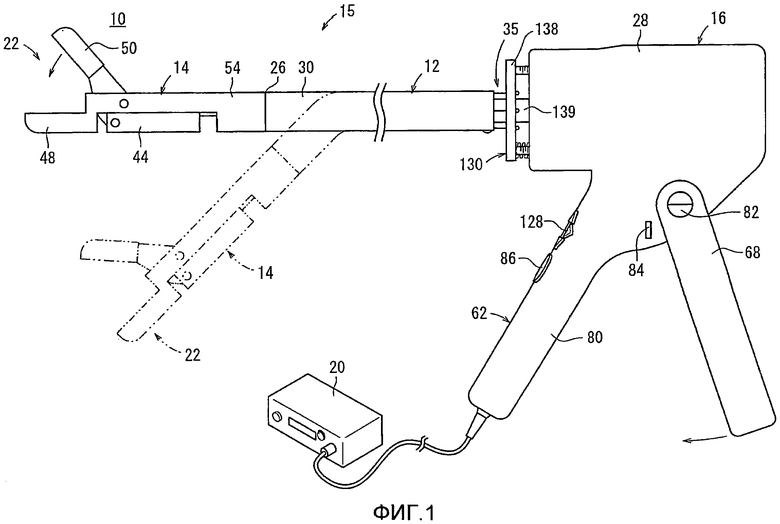
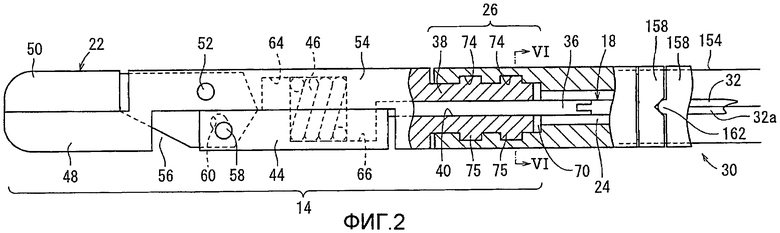
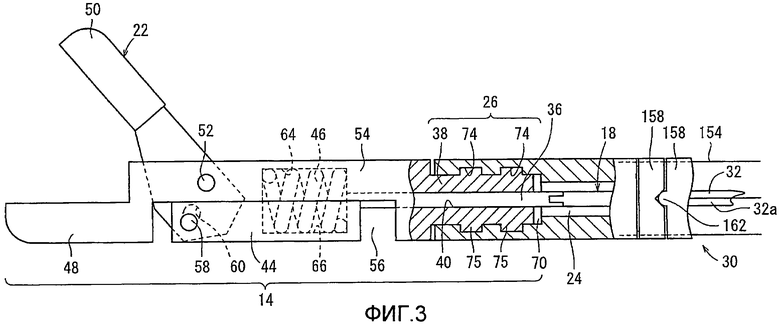
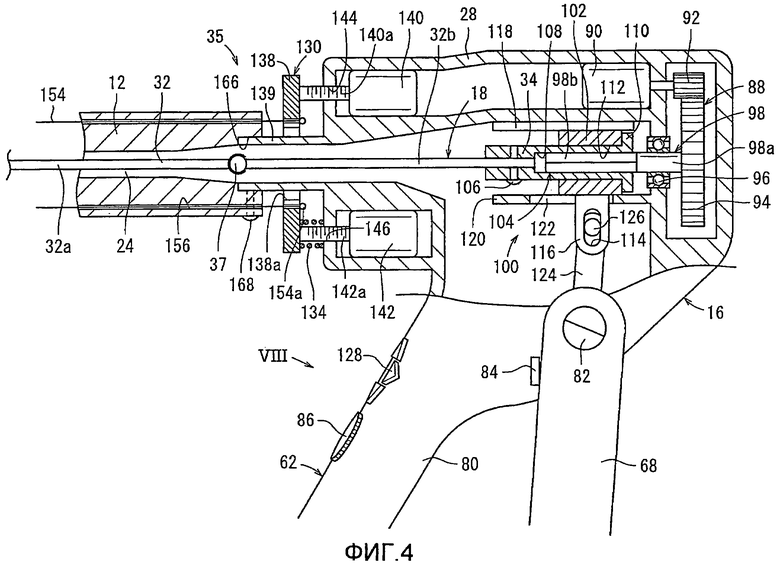
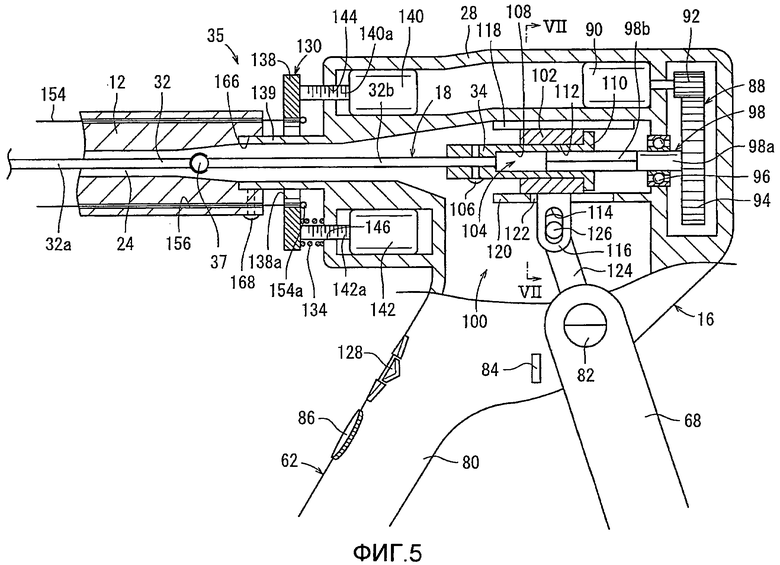
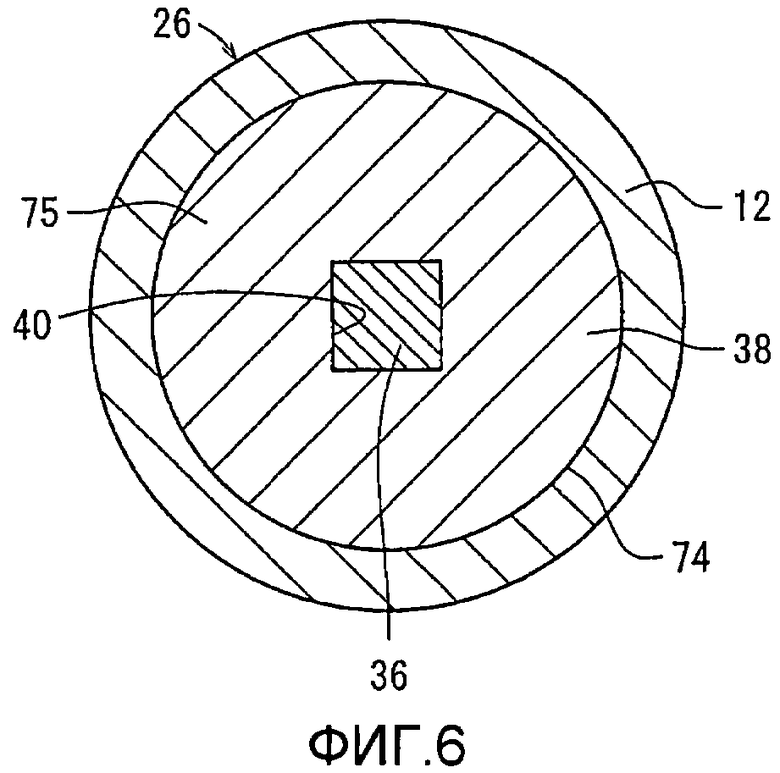
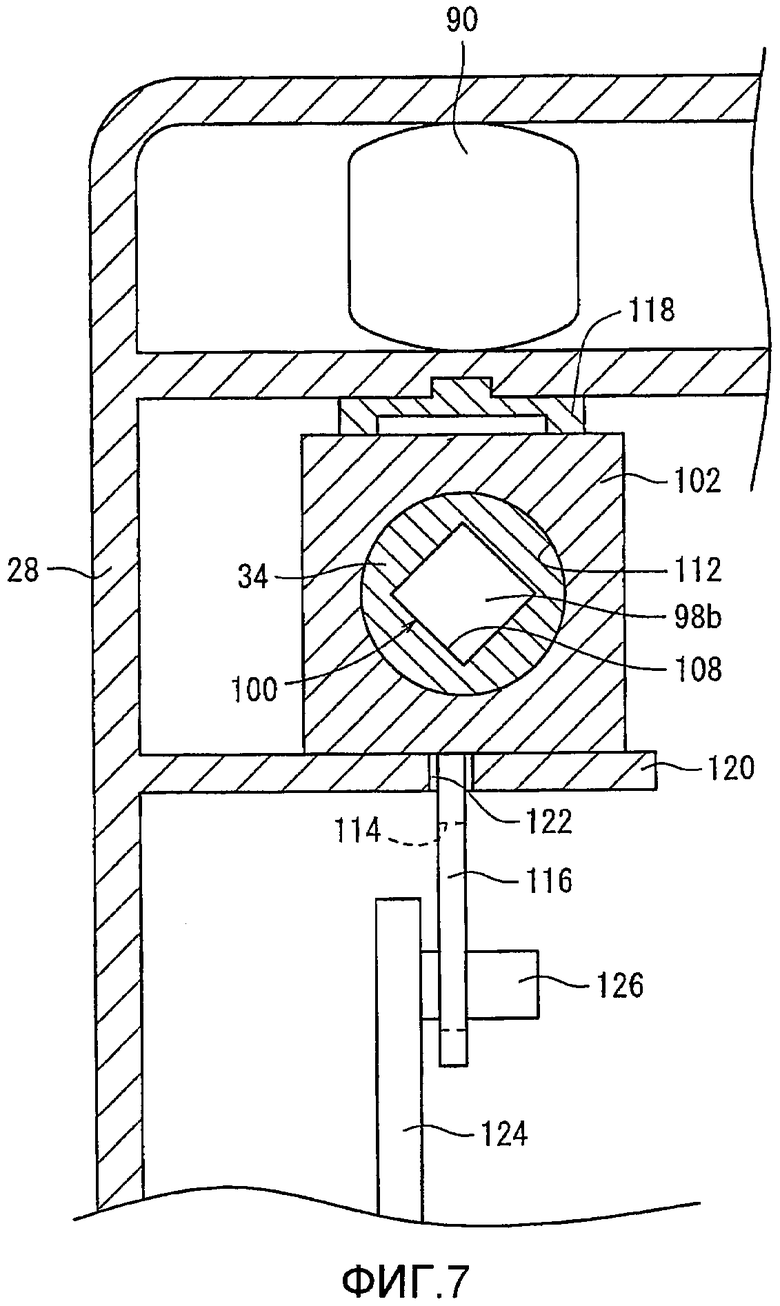
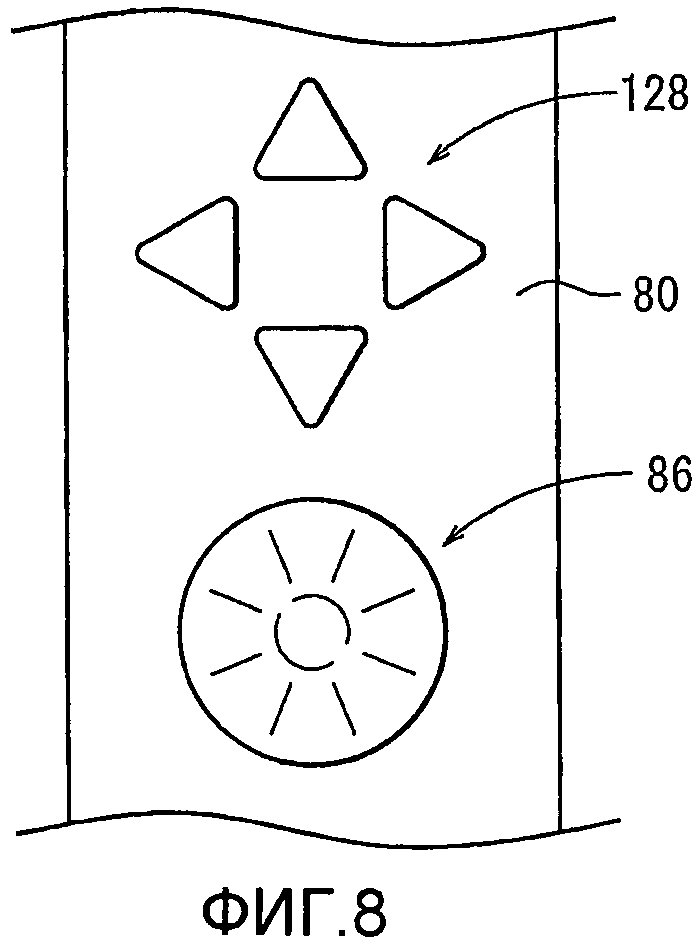
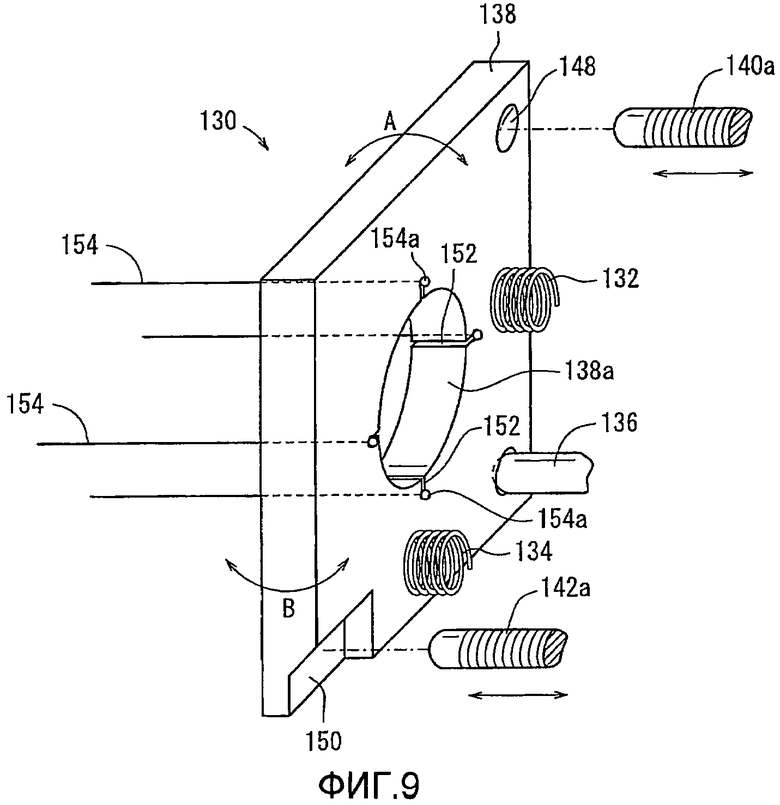
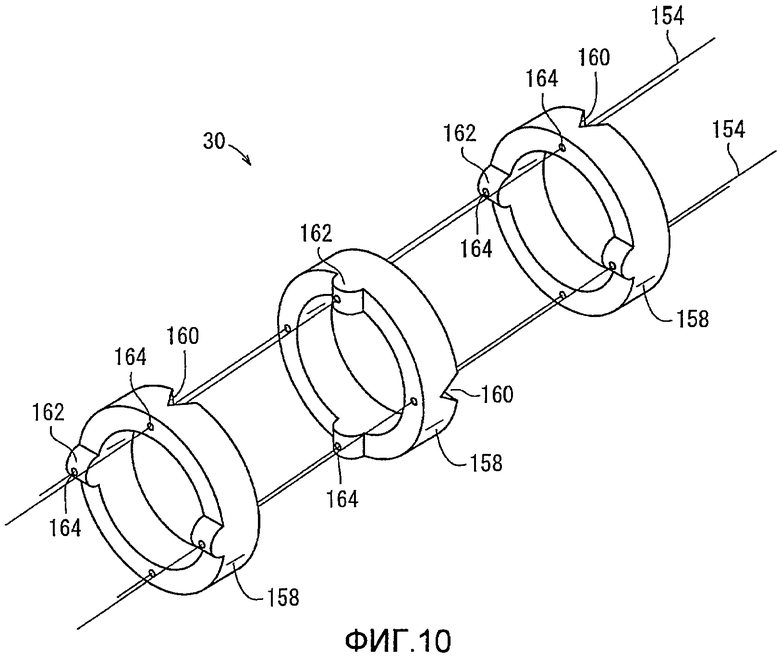
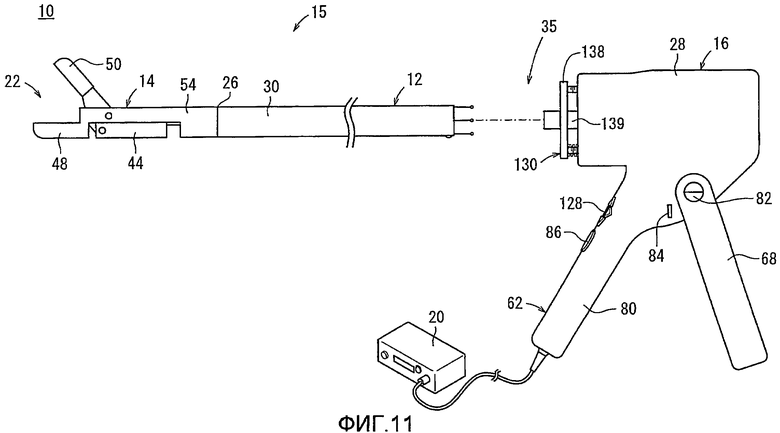
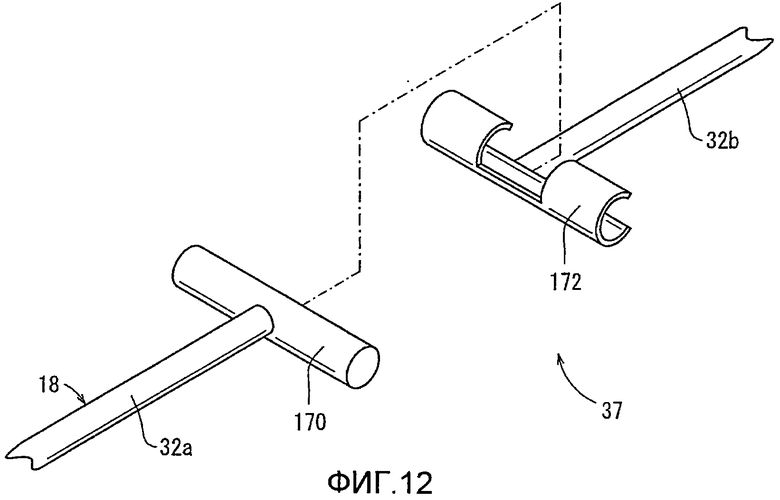
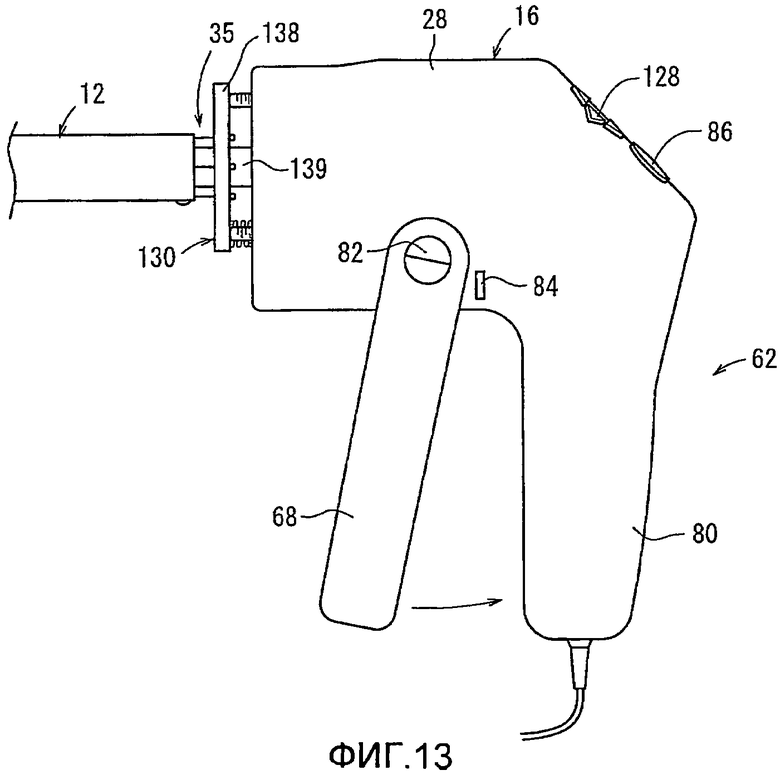
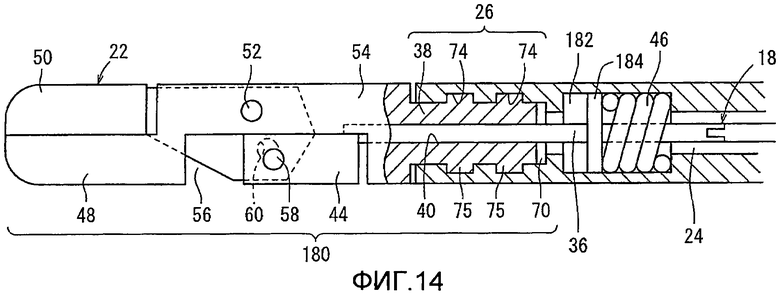
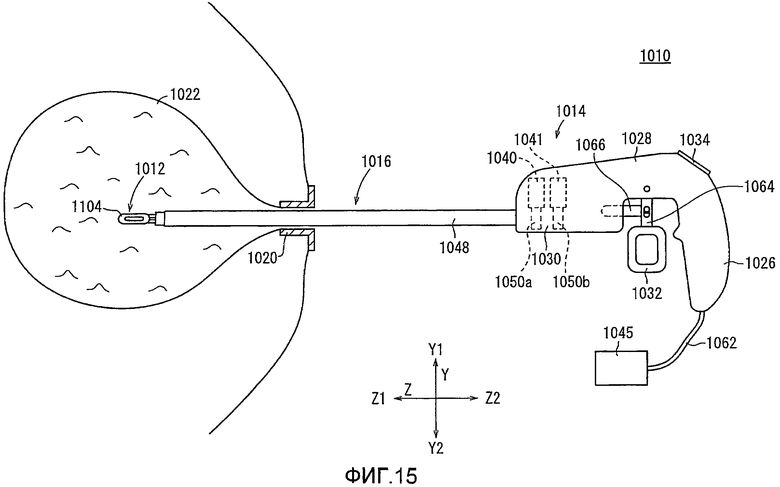
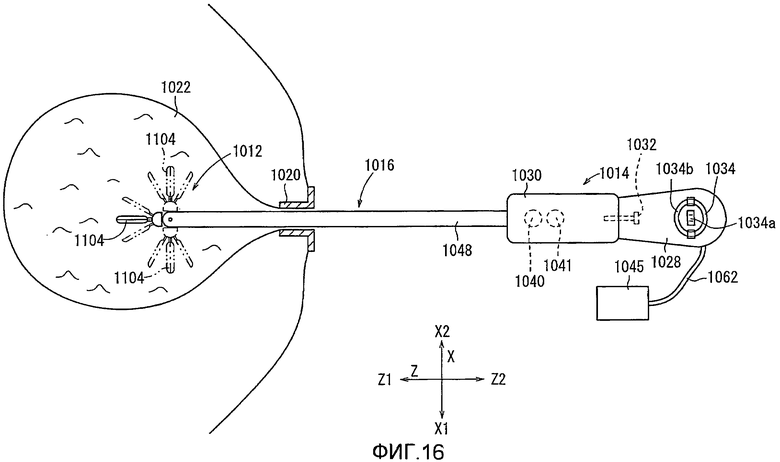
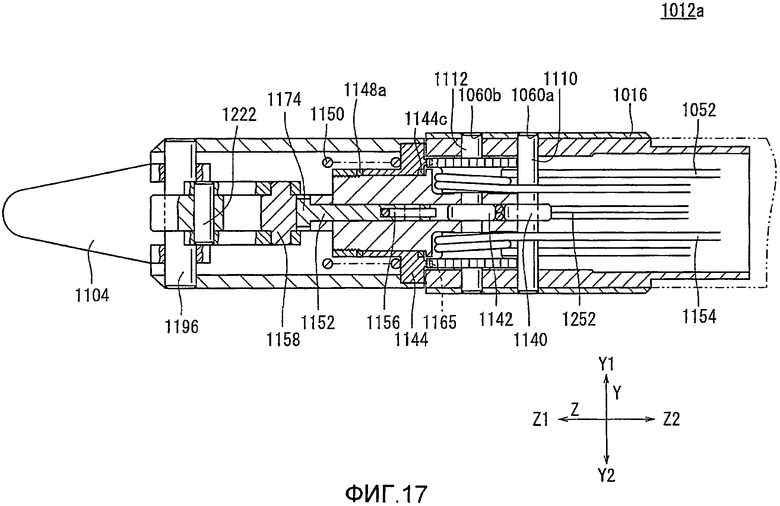
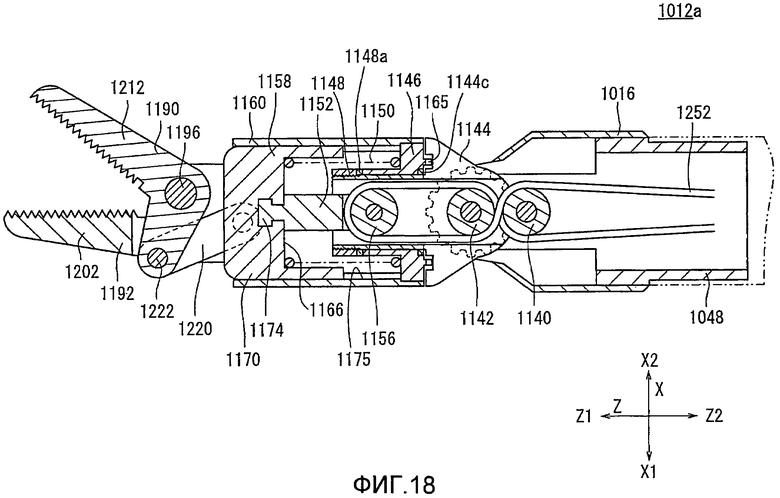
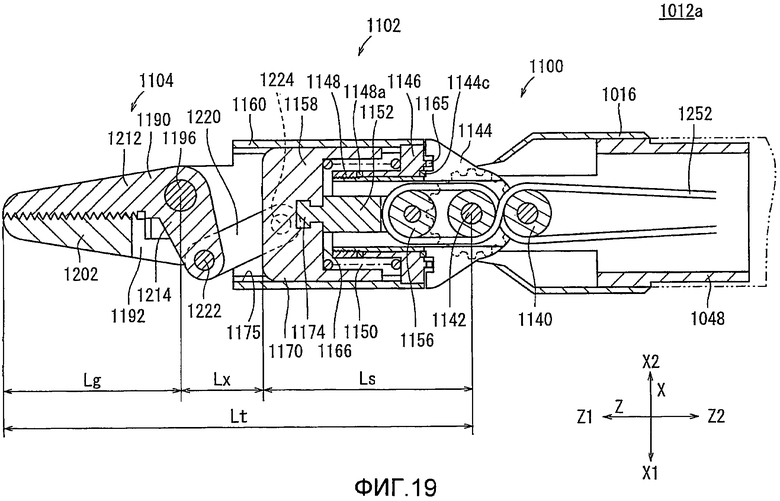
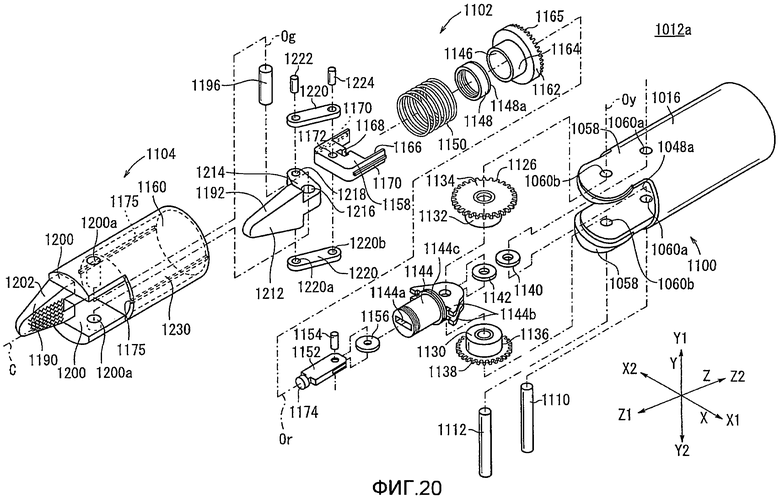
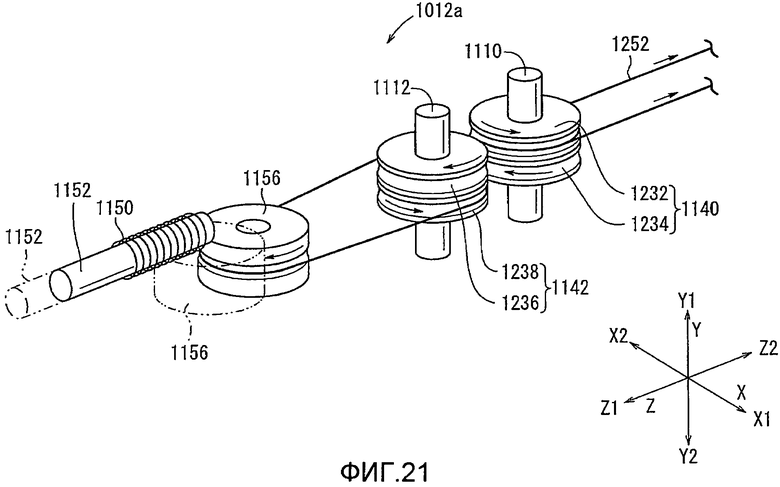
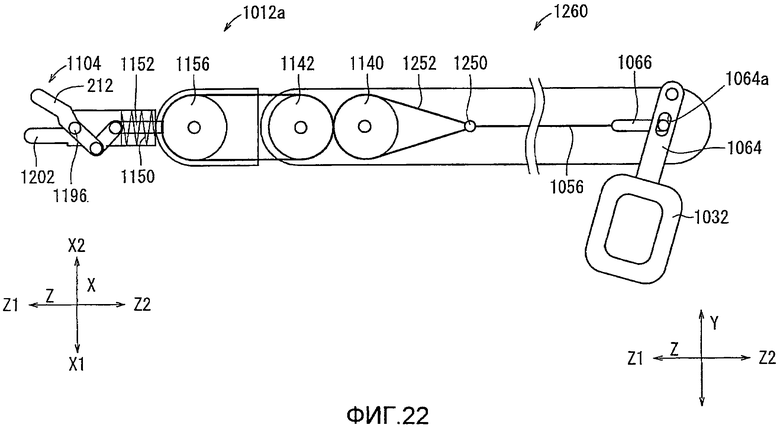
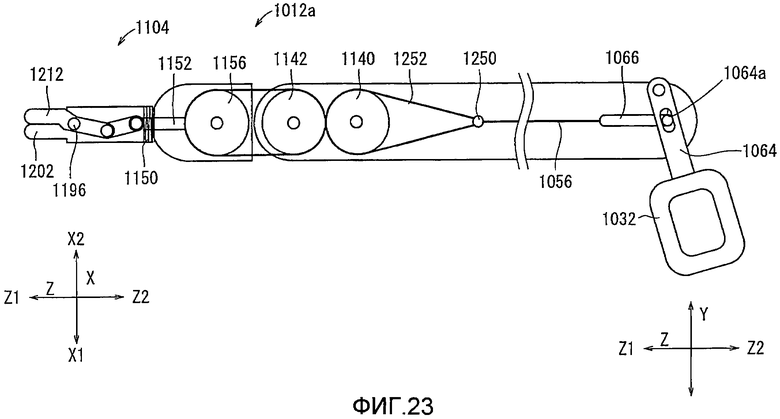
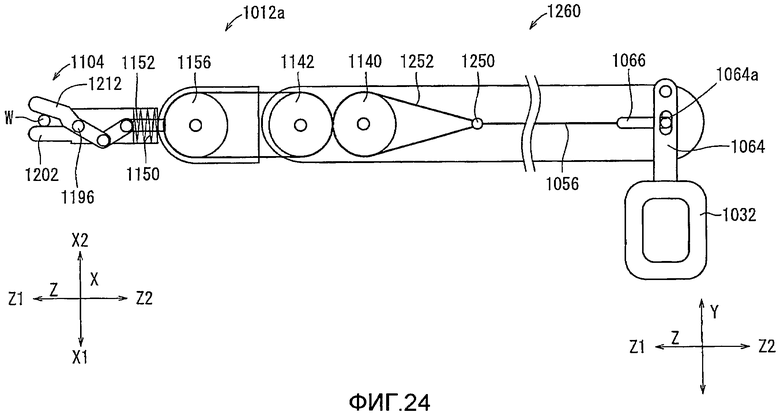
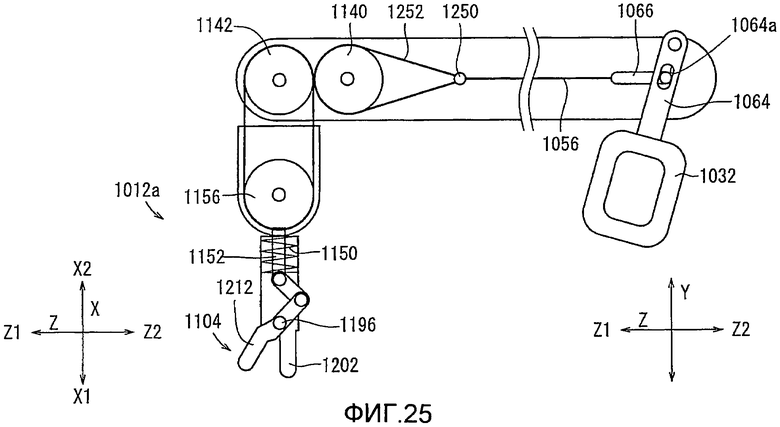
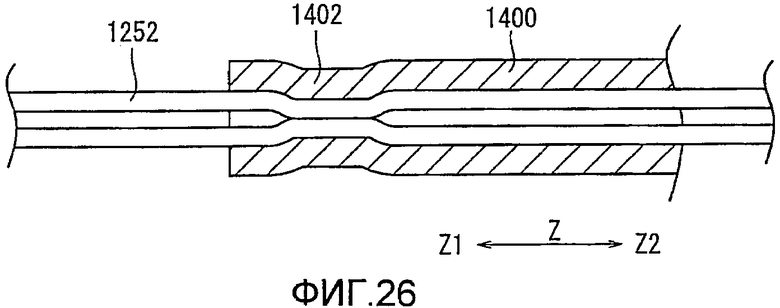
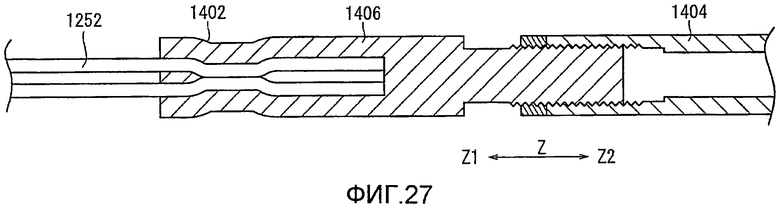
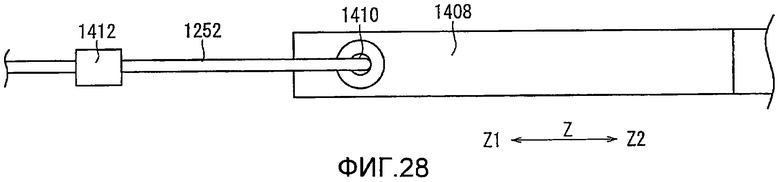
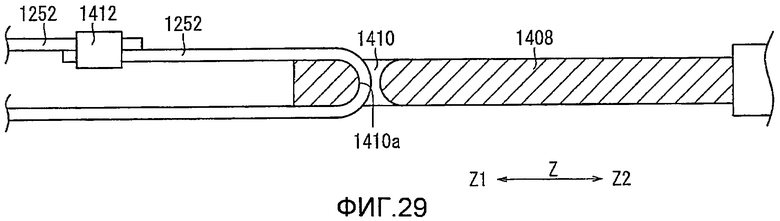
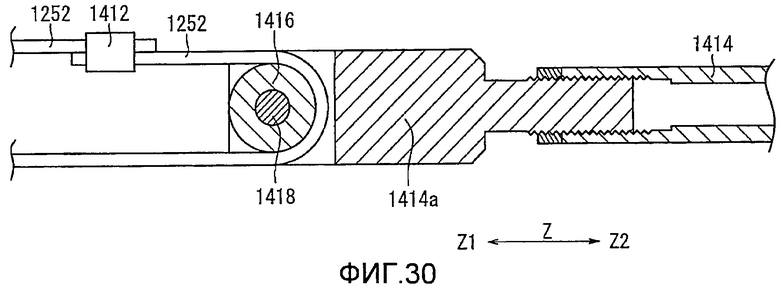
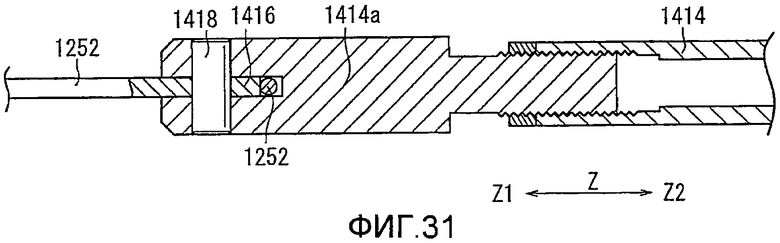
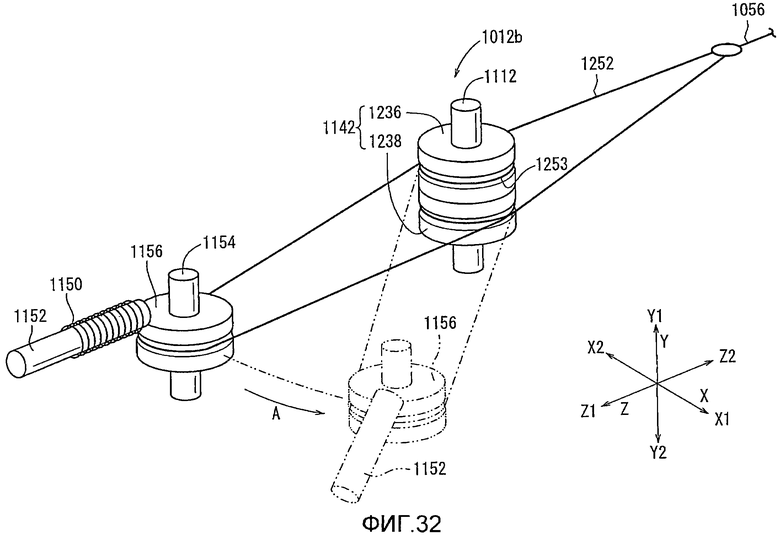
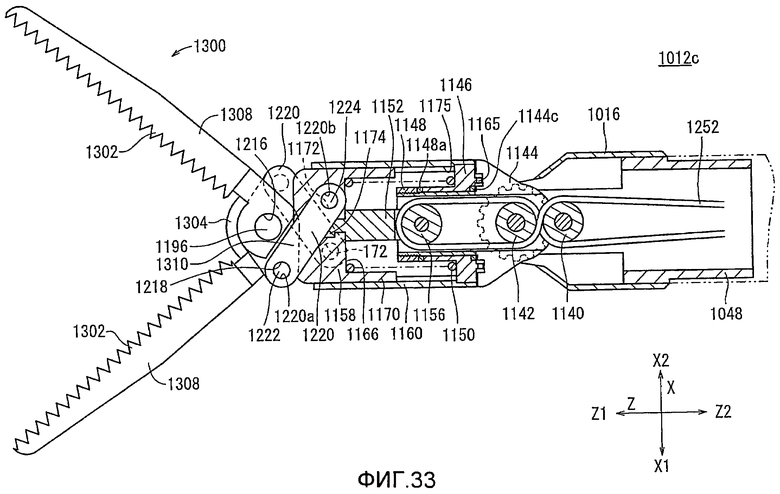
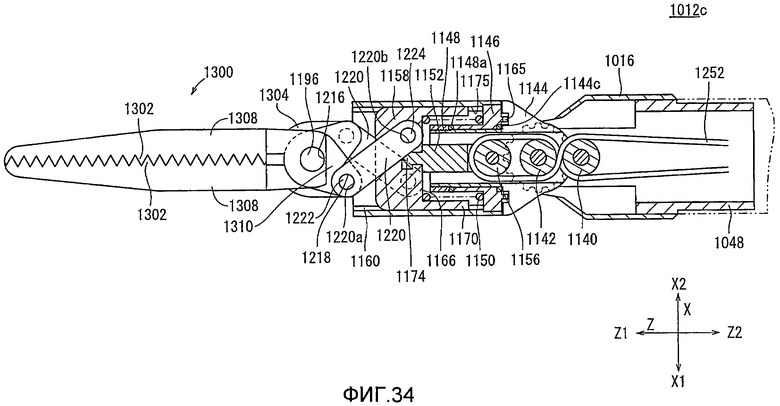
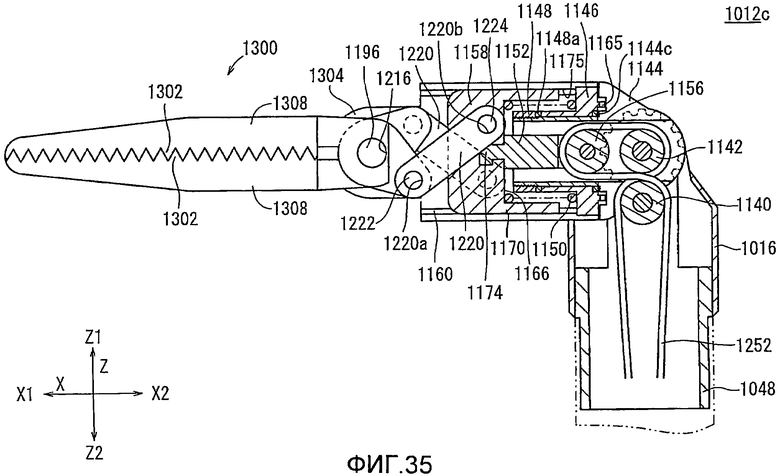
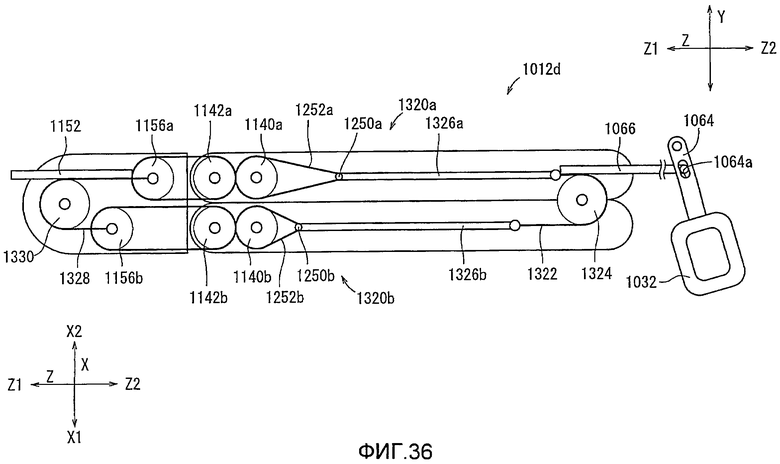
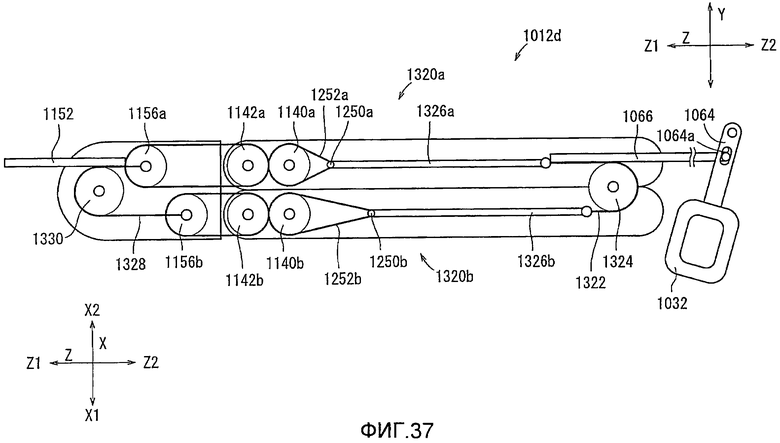
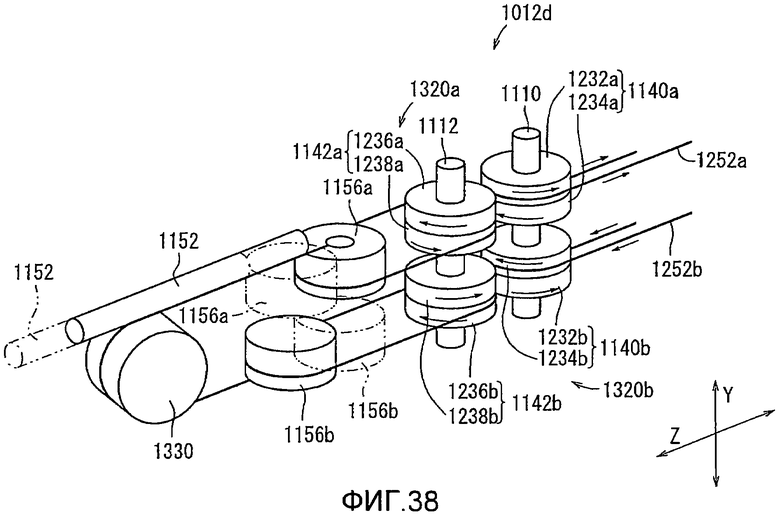
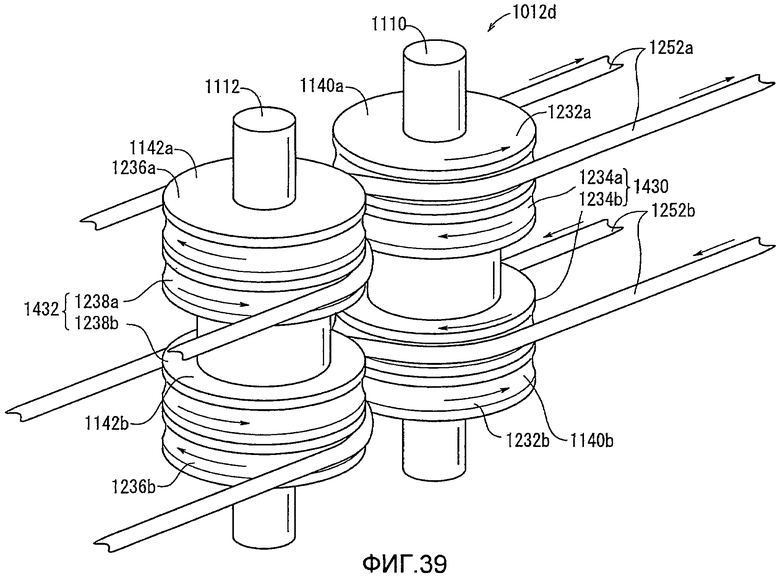
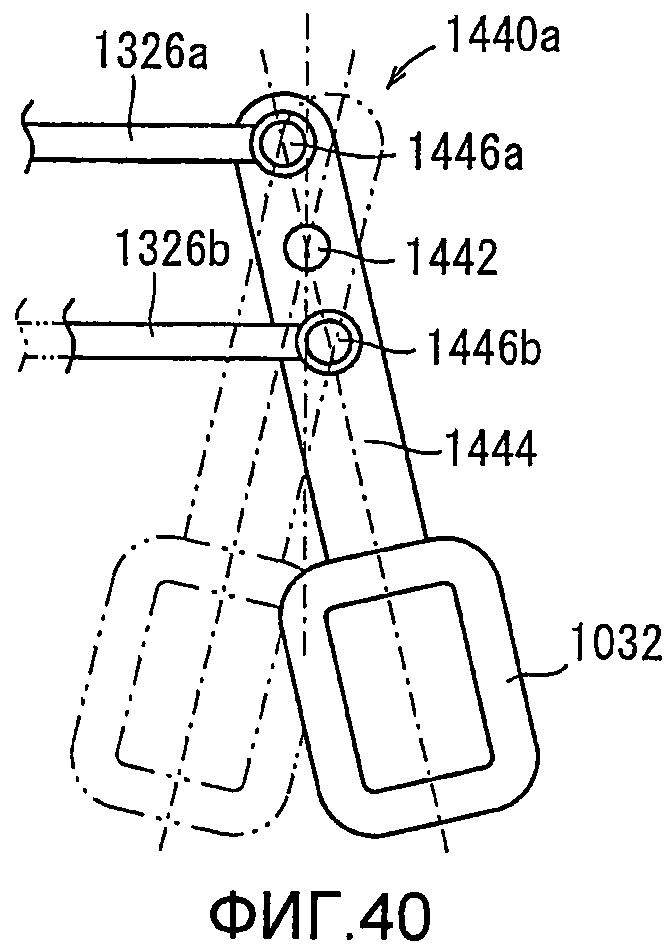
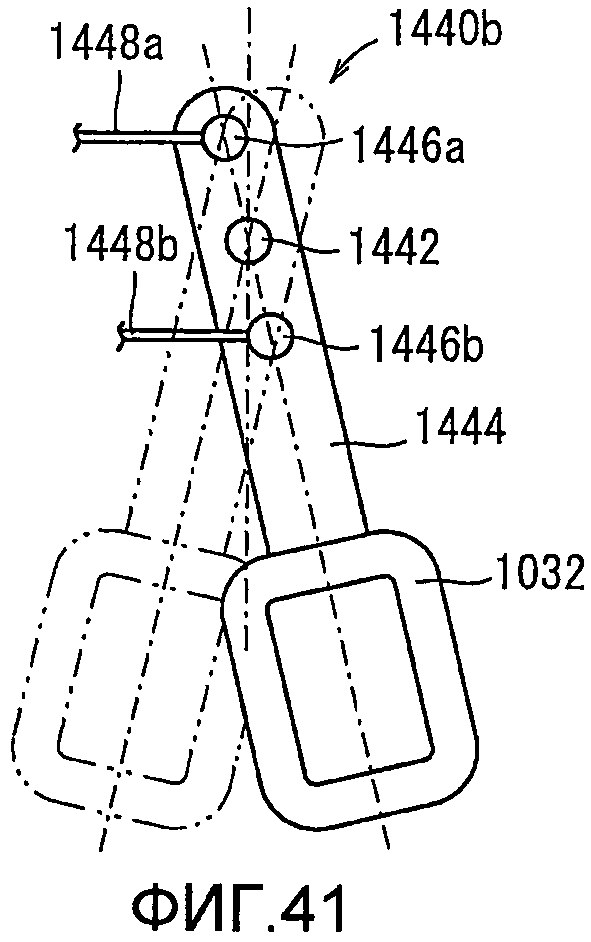
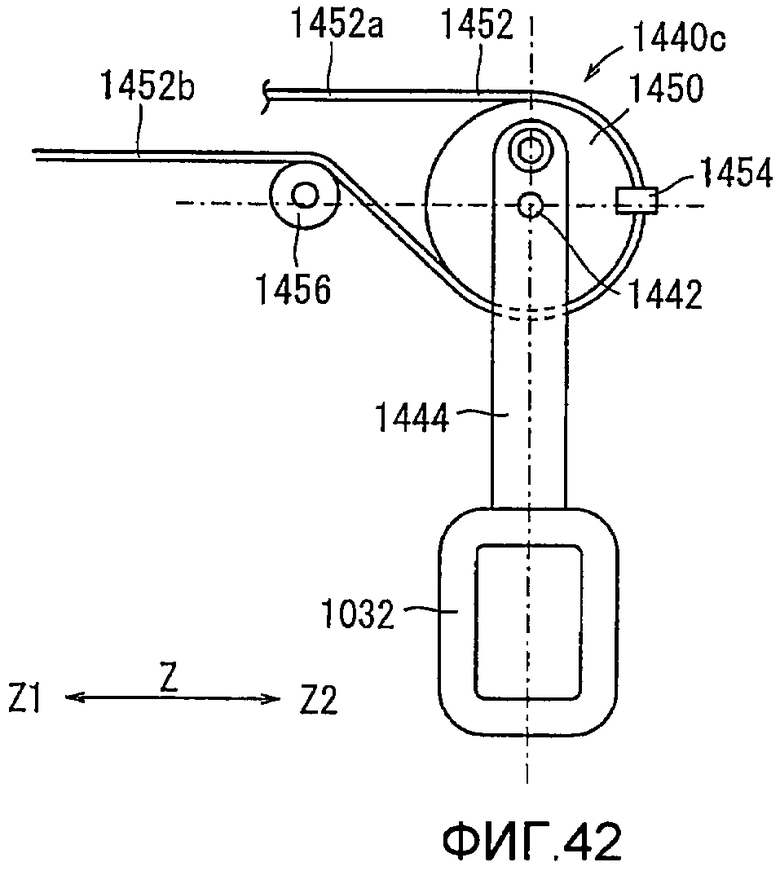
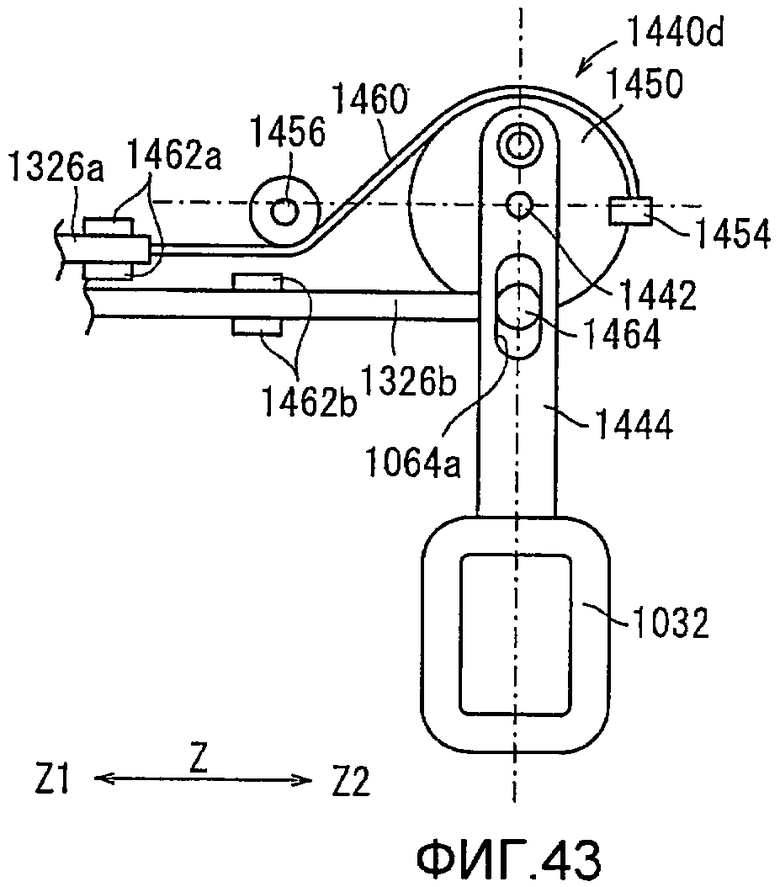
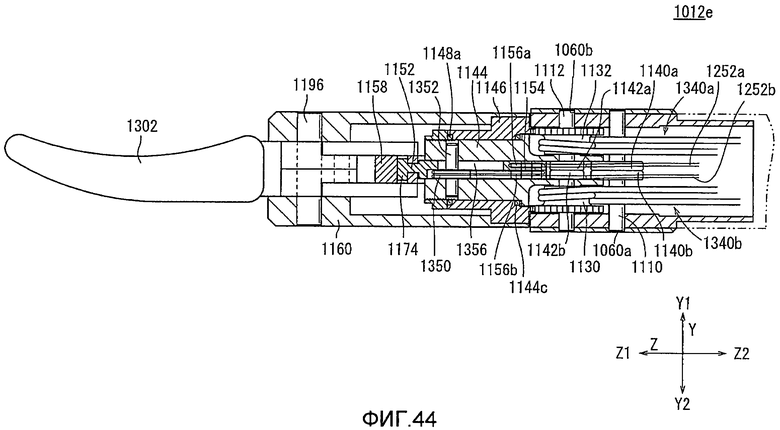
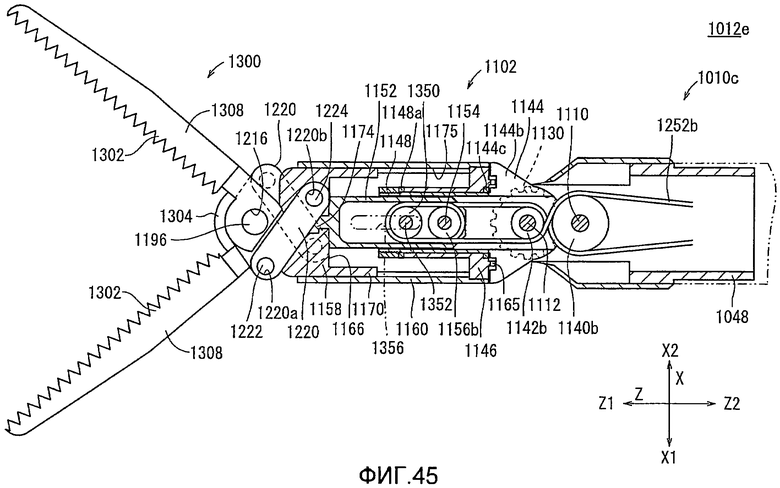
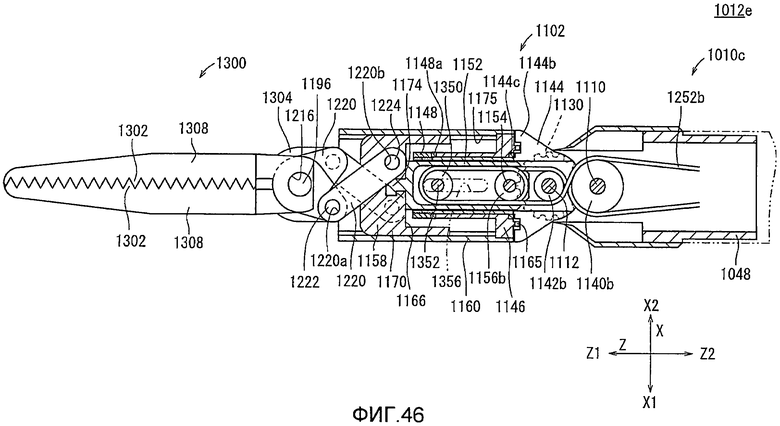
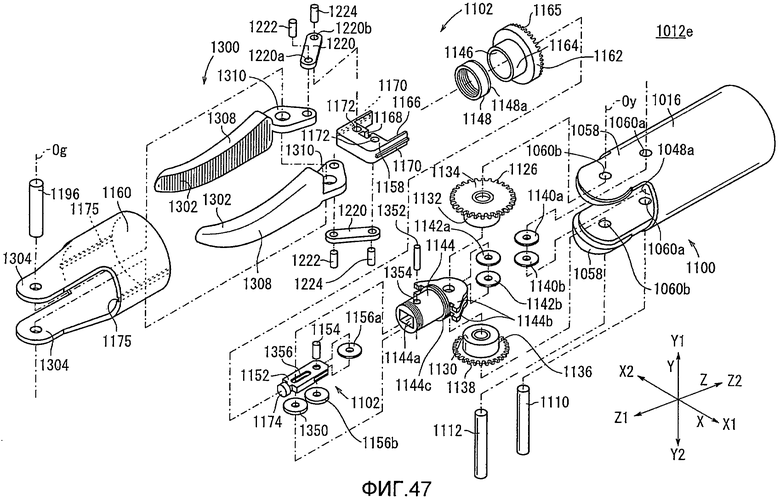
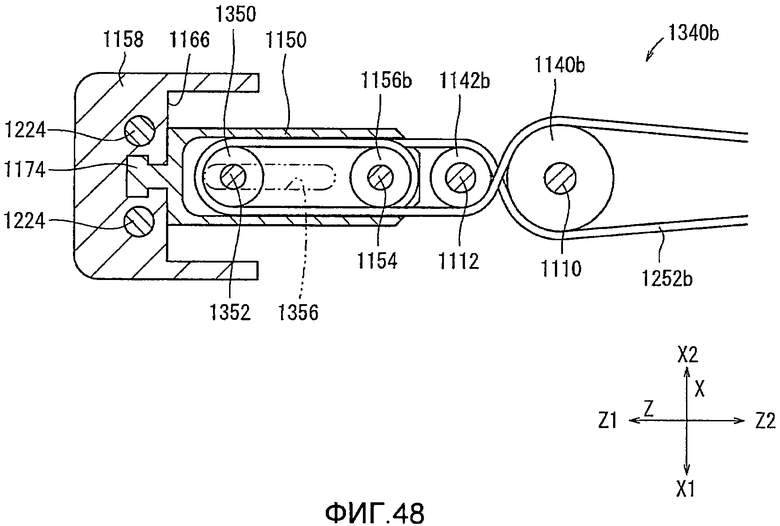
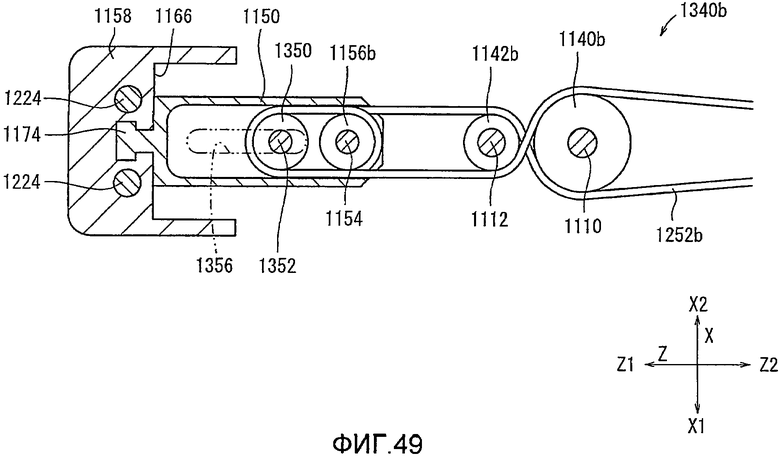
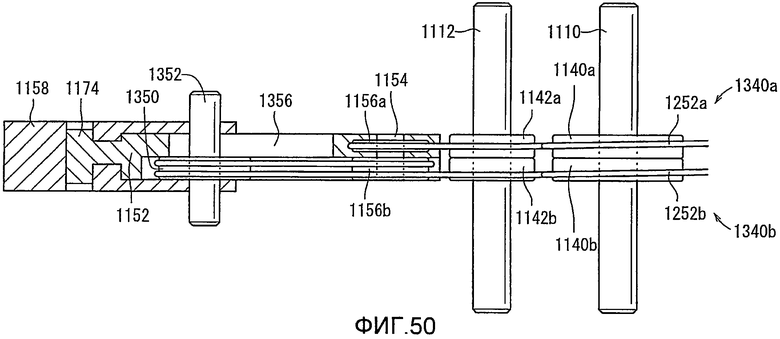
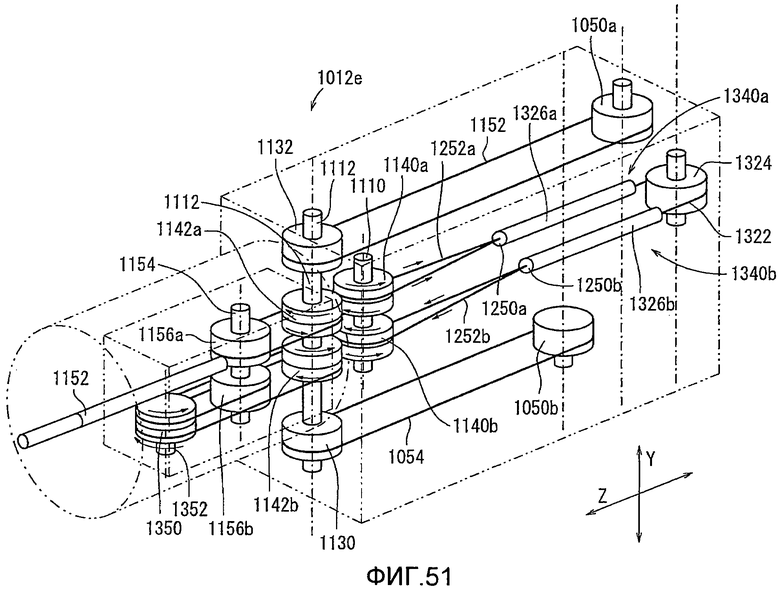
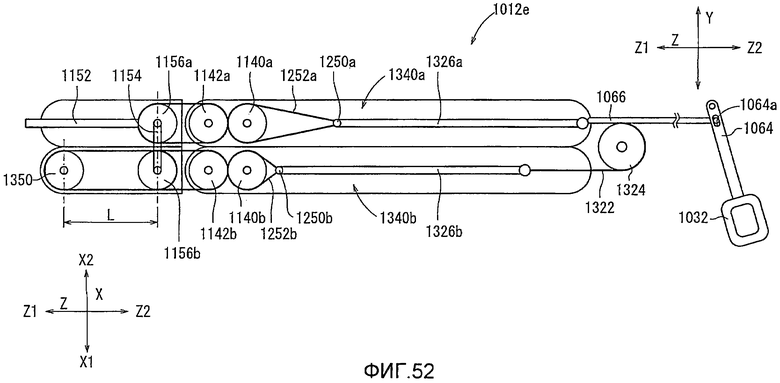
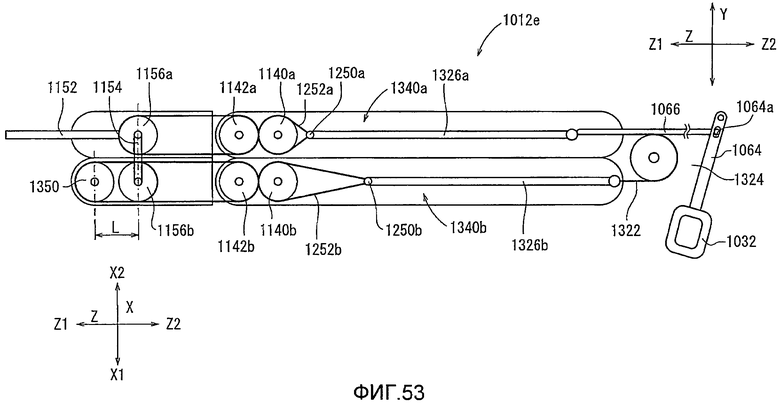
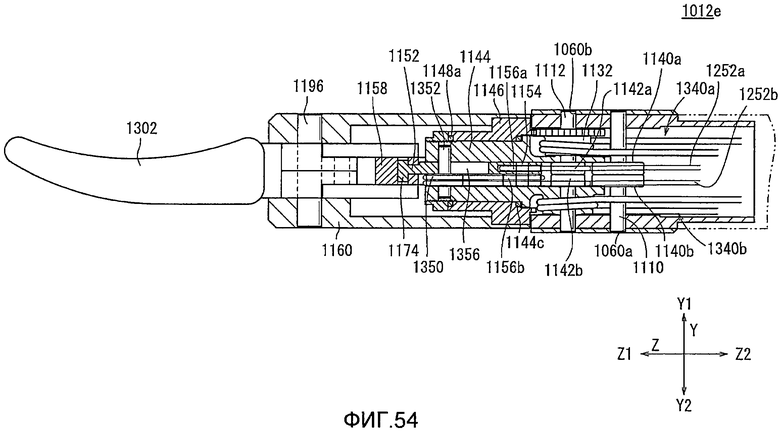
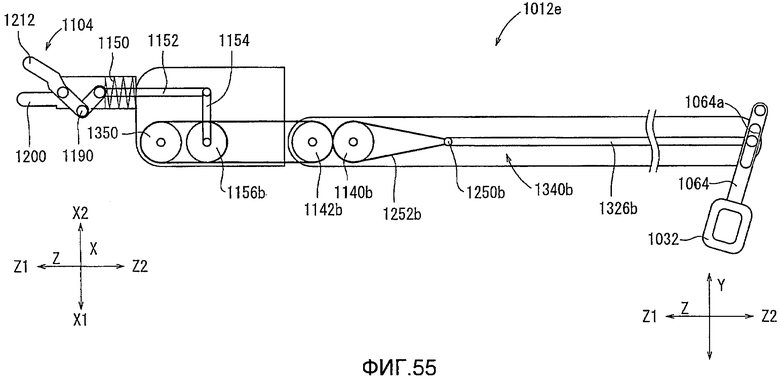
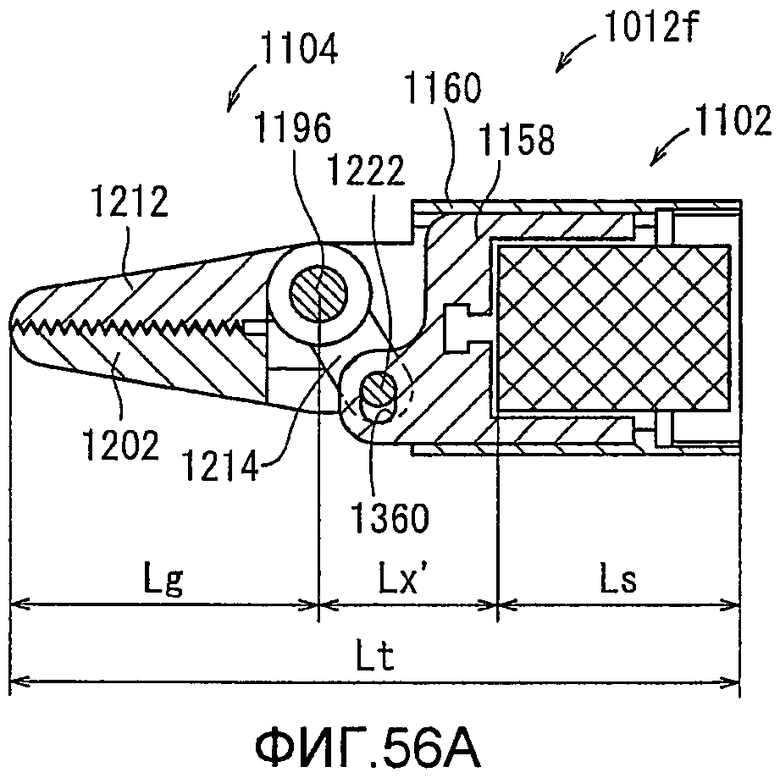
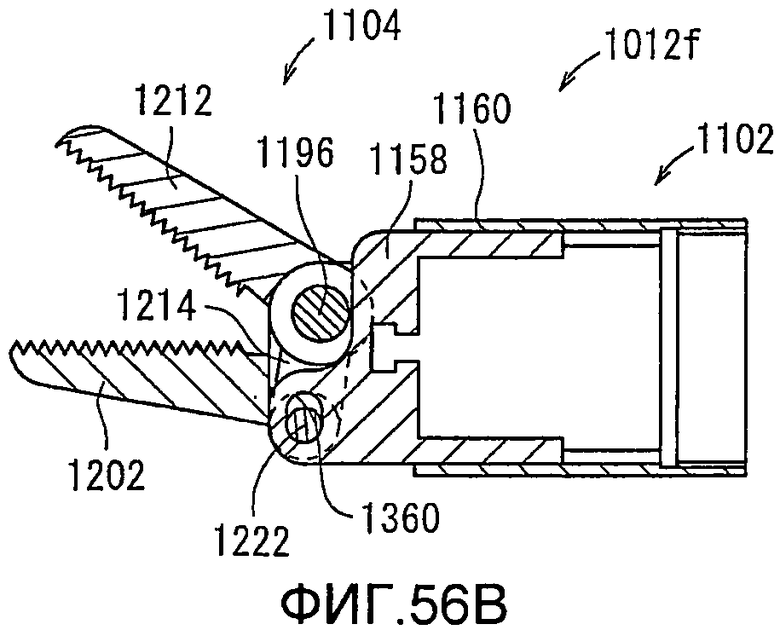
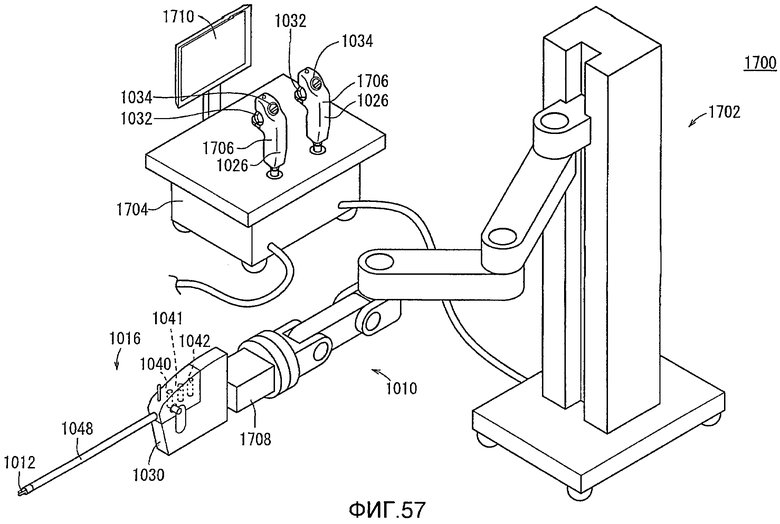
Изобретение относится к медицине и может быть использовано в лапароскопической хирургии. Медицинский манипулятор содержит рабочий блок дистального конца, который включает захватное приспособление в качестве конечного исполнительного звена. Функциональный блок предназначен для управления рабочим блоком дистального конца. Соединительное звено соединяет между собой рабочий блок дистального конца и функциональный блок. Механизм изменения пространственного положения позволяет изменить пространственное положение рабочего блока дистального конца. Механизм изменения пространственного положения управляется приводом сгибания и приводом вращения, управление которыми осуществляется тогда, когда хирург управляет функциональным блоком. В результате, когда хирург управляет функциональным блоком, передающее звено механически управляет конечным исполнительным звеном и управление медицинским манипулятором облегчается. 7 з.п. ф-лы, 57 ил.
1. Медицинский манипулятор, содержащий:
рабочий блок (14) дистального конца, включающий в себя конечное исполнительное звено (22);
функциональный блок (16) для управления рабочим блоком (14) дистального конца;
соединительное звено (12), соединяющее между собой рабочий блок (14) дистального конца и функциональный блок (16); а также
механизм (26) изменения пространственного положения для изменения пространственного положения рабочего блока (14) дистального конца, в котором
конечное исполнительное звено (22) выполнено с возможностью механического управления передающим звеном (18), когда функциональный блок (16) управляется хирургом,
механизм (26) изменения пространственного положения выполнен с возможностью управления приводным механизмом (90, 140, 142), управление которым осуществляется тогда, когда функциональный блок (16) управляется хирургом,
причем рабочий блок (14) дистального конца также включает в себя:
ведущее звено (1056), выполненное с возможностью перемещения вперед и назад на основании управления функциональным блоком,
кольцеобразное гибкое звено (1252), часть которого соединена с ведущим звеном (1056),
неактивное цилиндрическое звено (1140), расположенное ближе к стороне дистального конца, чем ведущее звено (1056),
ведомое цилиндрическое звено (1156), расположенное ближе к стороне дистального конца, чем неактивное цилиндрическое звено (1140), и выполненное с возможностью перемещения вперед и назад,
направляющее цилиндрическое звено (1142), расположенное между неактивным цилиндрическим звеном (1140) и ведомым цилиндрическим звеном (1156), при этом
конечное исполнительное звено (1104) присоединено к ведомому цилиндрическому звену (1156), а
гибкое звено (1252) проходит вдоль обеих сторон неактивного цилиндрического звена (1140) и наматывается вокруг ведомого цилиндрического звена (1156), причем гибкое звено пересекается между неактивным цилиндрическим звеном (1140) и направляющим цилиндрическим звеном (1142).
2. Медицинский манипулятор по п.1, в котором механизм (26) изменения пространственного положения содержит:
механизм сгибания для изгибания участка упомянутого соединительного звена (12); а также
механизм вращения для поворота рабочего блока (14) дистального конца вокруг оси,
причем механизм вращения выполнен с возможностью поворота рабочего блока (14) дистального конца вокруг отклоненной оси, когда рабочий блок (14) дистального конца отклонен от параллели с осью соединительного звена (12) механизмом сгибания.
3. Медицинский манипулятор по п.1, в котором соединительное звено (12) разъемно установлено на функциональном блоке (16).
4. Медицинский манипулятор по п.1, в котором функциональный блок (16) включает в себя рукоятку, выполненную с возможностью осуществления угловых перемещений под действием хирурга для возвратно-поступательного перемещения передающего звена (18).
5. Медицинский манипулятор по п.2, в котором приводной механизм (90, 140, 142) механизма сгибания перемещает проволоку, которая продолжается через соединительное звено (12), возвратно-поступательно, когда осуществляется упомянутым функциональным блоком (16).
6. Медицинский манипулятор по п.2, в котором передающее звено (18) продолжается через соединительное звено (12) и включает в себя, по меньшей мере, один гибкий участок, соответствующий участку соединительного звена (12), который поддается сгибанию с помощью механизма сгибания, при этом приводной механизм (90, 140, 142) механизма вращения поворачивает рабочий блок (14) дистального конца посредством передающего звена (18), управляемого функциональным блоком (16).
7. Медицинский манипулятор по п.1, в котором передающее звено (18) содержит гибкое звено и цилиндрическое звено, вокруг которого наматывается гибкое звено.
8. Медицинский манипулятор по п.1, в котором механизм (26) изменения пространственного положения включает в себя вращательный вал, содержащий цилиндрическое звено, при этом передающее звено (18) включает в себя гибкое звено, имеющее участок, намотанный вокруг цилиндрического звена, посредством чего передающее звено (18) управляет конечным исполнительным звеном (22) через гибкое звено.
| US 5792165 A, 11.08.1998 | |||
| DE 4136861 A1, 13.05.1993 | |||
| EP 0677275 A, 18.10.1995 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| US 4641657 A, 10.02.1987 | |||
| US 6119913 A, 19.09.2000. | |||

