Изобретение относится к области оптоэлектроники и может быть использовано при создании лазерных генераторов изображений, используемых для синтеза оптических дифракционных элементов на криволинейных (3D) оптических поверхностях.
Известен способ записи информации на плоских оптических поверхностях, включающий фокусировку основного и вспомогательного лазерных пучков излучения на сканируемую рабочую поверхность, в область, близкую к точке фокуса основного лазера, непрерывное измерение расстояния при помощи вспомогательного лазера до точки записи и корректировку фокуса основного лазера согласно величине изменения расстояния до точки записи (см. Киноформы. Оптическая система для синтеза элементов. Препринт №99 Института автоматики и электрометрии Сибирского отделения Академии наук СССР, Новосибирск, 1979 г., с.17-23).
В известном способе используется триангуляционный принцип измерения расстояния до точки фокуса основного лазера, для чего используется вспомогательный лазер. Поскольку запись изображения производится на плоскую поверхность, ошибка в определении расстояния до точки фокуса основного лазера не превышает 2-3%, что вполне допустимо для качественной записи информации. Однако для криволинейных поверхностей триангуляционный принцип измерения расстояния до точки фокуса основного лазера может давать погрешности до 20% и более, что не допустимо при получении высокоточных оптических элементов.
Известен также способ автоматической фокусировки для записи информации на криволинейных поверхностях, включающий фокусировку основного (рабочего) лазерного пучка и вспомогательного (зондирующего) лазерного пучка на рабочую поверхность, анализ характера сходимости/расходимости отраженного от 3D оптической поверхности зондирующего излучения и, в зависимости от характера сходимости/расходимости отраженного от 3D оптической поверхности зондирующего излучения, выработку сигнала управления исполнительным элементом, в соответствии с которым перемещают фокусирующий объектив таким образом, чтобы рабочее излучение было наилучшим образом сфокусировано на 3D поверхности (см. Патент РФ №2262749 С2. А.Г.Верхогляд, В.М.Гуренко и др. Способ автоматической фокусировки для записи информации на криволинейных поверхностях). Указанный способ выбран заявителем в качестве прототипа.
Основным недостатком известного способа является его высокая критичность к углу наклона криволинейной поверхности. Замечено экспериментально, что при любых наклонах оптической поверхности относительно плоскости, перпендикулярной оптической оси падающих пучков, в системе, реализующей известный способ, возникает дополнительная погрешность установки объектива точно на фокус, а при углах, больших 10°, устройство, реализующее данный способ автофокусировки, перестает работать.
Этот недостаток связан с тем, что сигнал управления исполнительным элементом, перемещающим фокусирующий объектив, формируется за счет введения оптических искажений в отраженный от оптической поверхности пучок вспомогательного лазера, например путем введения в пучок, идущий на вход позиционно-чувствительного фотоприемника, непрозрачного экрана и последующего позиционирования фотоприемника относительно оставшейся части излучения так, чтобы в случае падения на фотоприемник параллельного пучка, доли энергии частей пучка, падающих на оба фотоприемника, были равны. Учитывая, что распределение энергии в пучке не равномерное, а описывается распределением, близким к распределению Гаусса, то координата разделительной полосы между двумя фотоприемниками устанавливается экспериментально для каждого осветителя. В случае оптических криволинейных поверхностей при использования данного способа автоматической фокусировки имеет место то, что отраженная часть вспомогательного излучения возвращается в фокусирующий объектив по другому пути, отличному от пути падающего пучка. В этом случае после прохождения объектива ось вспомогательного пучка смещается относительно границы непрозрачного экрана. А это приводит, учитывая неравномерное распределение энергии в сечении пучка, к нарушению первоначальной настройки датчика расфокусировки, которая приводит к появлению погрешности вывода объектива в позицию, соответствующую наилучшей фокусировке, а при углах наклона оптической поверхности, больших 10°, происходит подрезание части отраженного пучка корпусными элементами объектива. Вызванное этим изменение сигнала воспринимается системой как неточное выполнение команды и система уводит объектив еще дальше от положения наилучшей фокусировки, т.е. происходит сбой в позиционировании объектива относительно его истинного фокуса.
Задачей настоящего изобретения является расширение области устойчивой работы устройств, реализующих предлагаемый способ автоматической фокусировки излучения на криволинейные оптические поверхности.
Указанная задача в предлагаемом способе автоматической фокусировки рабочего излучения на 3D оптическую поверхность достигается за счет того, что зондирующее излучение до входа его в фокусирующий объектив смещают параллельно рабочему в зависимости от угла наклона 3D оптической поверхности так, чтобы оно падало на оптическую поверхность по нормали. При этом отраженное от 3D оптической поверхности зондирующее излучение направляют на анализатор сходимости/расходимости излучения, используя узел, с помощью которого излучение смещают параллельно рабочему, причем часть излучения, направленного на анализатор, направляют на позиционно-чувствительный фотоприемник, выходной сигнал которого используют для управления узлом, смещающим зондирующее излучение параллельно рабочему.
В этом случае отраженное от поверхности излучение возвращается в фокусирующий объектив по пути, по которому оно из него вышло. Благодаря этому достигается следующий технический результат: во-первых, по крайней мере, в два раза увеличивается диапазон углов наклона 3D оптической поверхности относительно плоскости, перпендикулярной оптической оси фокусирующего объектива. И, во-вторых, обеспечивается постоянство первоначальной настройки позиционно-чувствительного фотоприемника относительно центра вспомогательного излучения, что существенно улучшает по сравнению с прототипом качество работы системы автофокусировки, реализующей предлагаемый способ.
Пример реализации предлагаемого способа
На фиг.1 изображена система автоматической фокусировки рабочего излучения на 3D оптическую поверхность, содержащая полупроводниковый лазер 1, вспомогательное зеркало 2, дихроичное зеркало 3, узел смещения 4, фокусирующий объектив 5, полупрозрачное зеркало 6, фотоприемник 7, светоделитель 8, непрозрачный экран 9, позиционно-чувствительный фотоприемник 10, силовой драйвер 11, драйвер 12.
Рассмотрим работу системы автоматической фокусировки.
Пусть необходимо рабочее излучение РИ поддерживать в сфокусированном положении на поверхности оптического элемента, например линзы. В этом случае поверхность элемента будет представлена сферой или слегка измененной сферой (асферикой). Но в общем случае это будет 3D оптическая поверхность. Для удержания РИ в сфокусированном на 3D поверхности положении применяется специальная система, которая использует т.н. зондирующее излучение ЗИ, которое поступает от дополнительного источника, например полупроводникового лазера 1. В этом случае для совмещения РИ и ЗИ используется специальное дихроичное зеркало 3, которое РИ пропускает, а ЗИ - отражает.
Рассмотрим работу системы в исходном состоянии, когда поверхность для записи элементов плоская или систему навели на самую верхнюю точку (апекс) 3D поверхности. В этом случае узел смещения 4 находится в положении, когда его фронтальные поверхности расположены ортогонально падающему ЗИ. В результате этого ЗИ попадает в центр дихроичного зеркала 3 (показано на фиг.1 штриховыми линиями). Далее ЗИ отражается от него и попадает в фокусирующий объектив 5 в самом его центре. Если поверхность записи находится в фокальной плоскости фокусирующего объектива 5, то, отразившись от поверхности записи, ЗИ возвращается в фокусирующий объектив 5 и преобразуется им из расходящегося пучка в параллельный. Т.к. фронтальные поверхности узла смещения 4 ортогональны оси пучка, то он проходит его без каких-либо искажений и поступает на полупрозрачное зеркало 6. Это зеркало небольшую часть ЗИ ответвляет на фотоприемник 7, а большую часть пропускает на светоделитель 8. Светоделитель 8 направляет ЗИ на анализатор сходимости/расходимости ЗИ, состоящий из непрозрачного экрана 9 и позиционно-чувствительного фотоприемника 10. Для рассматриваемой ситуации на вход позиционно-чувствительного фотоприемника 10 поступает параллельный пучок ЗИ. Граница раздела фоточувствительных областей позиционно-чувствительного фотоприемника 10 настроена так, что интегральные потоки света на левую и правую половины его равны и позиционно-чувствительный фотоприемник 10 вырабатывает нулевой сигнал управления на исполнительный элемент фокусирующего объектива 5. Аналогичная ситуация возникает и у фотоприемника 7, который настроен так, что граница раздела его фоточувствительных областей совмещена с оптической осью ЗИ. Как следствие, поступающее на вход фотоприемника 7 ЗИ одинаково освещает все фоточувствительные области фотоприемника 7. Заметим, что фотоприемник 7 может иметь либо две, либо четыре фоточувствительные области. В первом случае он будет иметь возможность регистрировать отклонения только по одной координате, а во втором - по двум. Так или иначе, но фотоприемник 7 формирует нулевой сигнал на выходе, что приводит к сохранению состояния узла смещения 4. Если поверхность записи не находится в фокусе, то на выходе фокусирующего объектива 5 ЗИ будет либо сходящимся, либо расходящимся в зависимости от того, где находится фокальная плоскость фокусирующего объектива 5: перед поверхностью записи или за ней. Если имеет место недофокусировка, то ЗИ после непрозрачного экрана 9 представлено сходящимся пучком, в результате чего освещенность правой области позиционно-чувствительного фотоприемника 10 уменьшается, а левой остается неизменным. Возникает разностный сигнал, который через силовой драйвер 11 заставляет смещаться фокусирующий объектив 5 в направлении, при котором поверхность записи совместится с фокальной плоскостью, а разностный сигнал снова станет нулевым. Если же имела место перефокусировка, то после фокусирующего объектива 5 ЗИ будет расходящимся и после непрозрачного экрана 9 ЗИ засветит большую часть правой области позиционно-чувствительного фотоприемника 10. Возникнет разностный сигнал с противоположным знаком и силовой драйвер 11 заставит смещаться фокусирующий объектив 5 в противоположном направлении до того момента, пока разностный сигнал не станет нулевым и поверхность записи вновь не совместится с фокальной плоскостью. В обеих этих ситуациях часть излучения ЗИ, ответвляемая полупрозрачным зеркалом 6 на фотоприемник 7, не приводит к каким-либо изменениям сигнала на выходе фотоприемника 7.
Рассмотрим теперь ситуацию, когда поверхность записи - произвольная 3D оптическая поверхность. Пусть ось фокусирующего объектива 5 смещена вправо, как показано фиг.1, относительно апекса этой поверхности, а обратные связи двух контуров управления разомкнуты. Наклон поверхности записи в данной точке таков, что отраженное излучение не попадает даже в фокусирующий объектив 5 и, как следствие, система не может работать.
Рассмотрим теперь ситуацию, что в данную точку 3D поверхности система пришла с включенными контурами управления. Тогда смещение оси фокусирующего объектива 5 вправо приводит к тому, что отраженное от поверхности ЗИ начинает смещаться вправо в два раза быстрее (угол падения ЗИ равен углу отражения и, как следствие, угол раствора пучков равен двойному углу падения). В результате после отражений в дихроичном зеркале 3 и полупрозрачном зеркале 6 ЗИ станет больше освещать левую область фотоприемника 7. На выходе фотоприемника 7 возникает разностный сигнал, который с помощью драйвера 12 заставляет поворачиваться узел смещения 4 по часовой стрелке до того момента, когда разностный сигнал фотоприемника 7 не станет равным нулю. Это произойдет в момент, когда ЗИ сместится от оптической оси фокусирующего объектива 5 на величину, при которой ЗИ будет падать на 3D поверхность ортогонально. В результате будет восстановлена первоначальная настройка системы, а сама система будет выполнять функции автоматической фокусировки, по крайней мере, в два раза большем диапазоне изменения углов наклона 3D поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ДЛЯ ЗАПИСИ ИНФОРМАЦИИ НА КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЯХ | 2002 |
|
RU2262749C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ЛАЗЕРНОГО ФОТОПОСТРОИТЕЛЯ | 2001 |
|
RU2207637C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| УСТРОЙСТВО ДВУХСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2006 |
|
RU2328077C1 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2022 |
|
RU2794167C1 |
| Способ и устройство считывания данных с носителя из стекла | 2019 |
|
RU2710388C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| Устройство для автоматической фокусировки | 1985 |
|
SU1288754A1 |
| СПОСОБ АВТОФОКУСИРОВКИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ НА ИНФОРМАЦИОННОМ СЛОЕ НОСИТЕЛЯ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162253C1 |
| ЛАЗЕР | 1992 |
|
RU2054217C1 |
Изобретение относится к области оптоэлектроники и может быть использовано при создании лазерных генераторов изображений, используемых для синтеза оптических дифракционных элементов на 3D оптических поверхностях. В способе автоматической фокусировки используют рабочее излучение (РИ) и зондирующее излучение (ЗИ), которое направляют на 3D оптическую поверхность, анализируют характер сходимости/расходимости отраженного от 3D поверхности ЗИ, вырабатывают сигнал управления исполнительным элементом, перемещают фокусирующий объектив таким образом, чтобы РИ было наилучшим образом сфокусировано на 3D поверхности. ЗИ до входа его в фокусирующий объектив смещают параллельно РИ в зависимости от угла наклона 3D поверхности. Отраженное от 3D поверхности ЗИ направляют на анализатор сходимости/расходимости излучения, используя узел, с помощью которого ЗИ смещают параллельно РИ. Часть излучения, направленного на анализатор, направляют на позиционно-чувствительный фотоприемник, выходной сигнал которого используют для управления узлом, смещающим ЗИ параллельно РИ. Технический результат - расширение области устойчивой работы устройств, реализующих способ. 1 ил.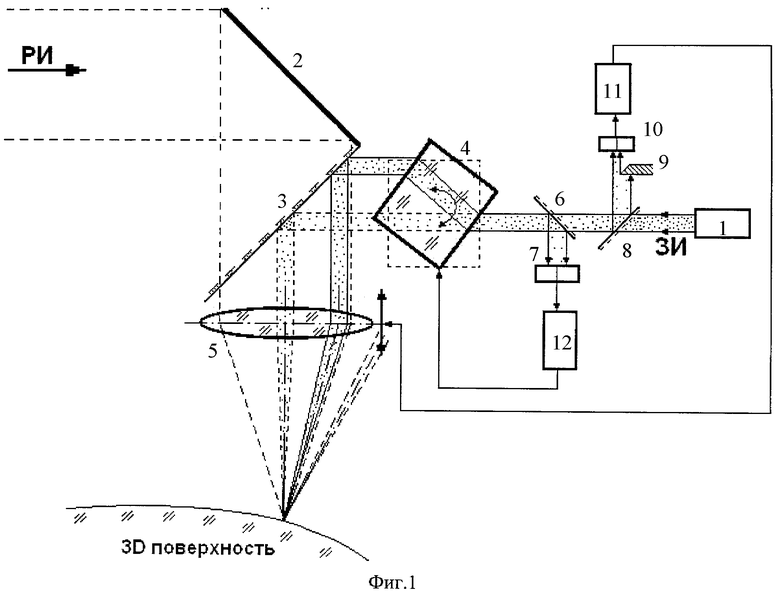
Способ автоматической фокусировки рабочего излучения на 3D оптическую поверхность, состоящий в том, что используют рабочее излучение основного лазерного пучка и зондирующее излучение вспомогательного лазерного пучка, которое направляют на упомянутую 3D оптическую поверхность, анализируют характер сходимости/расходимости отраженного от 3D оптической поверхности зондирующего излучения и в зависимости от характера сходимости/расходимости отраженного от 3D оптической поверхности зондирующего излучения вырабатывают сигнал управления исполнительным элементом, в соответствии с которым перемещают фокусирующий объектив таким образом, чтобы рабочее излучение было наилучшим образом сфокусировано на 3D поверхности, отличающийся тем, что зондирующее излучение до входа его в фокусирующий объектив смещают параллельно рабочему в зависимости от угла наклона 3D оптической поверхности, при этом отраженное от 3D оптической поверхности зондирующее излучение направляют на анализатор сходимости/расходимости излучения, используя узел, с помощью которого зондирующее излучение смещают параллельно рабочему, причем часть излучения, направленного на анализатор, направляют на позиционно-чувствительный фотоприемник, выходной сигнал которого используют для управления узлом, смещающим зондирующее излучение параллельно рабочему.
| СПОСОБ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ДЛЯ ЗАПИСИ ИНФОРМАЦИИ НА КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЯХ | 2002 |
|
RU2262749C2 |
| Способ автоматической фокусировки оптической системы и устройство для его осуществления | 1991 |
|
SU1809414A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ ШИРОКОПОЛОСНЫХ СИГНАЛОВ НА МАГНИТНУЮ ЛЕНТУ | 1972 |
|
SU453733A1 |
| Устройство для стирки | 1990 |
|
SU1815295A1 |

