Изобретение относится к системам лидаров и лазерного видения объектов в рассеивающих свет оптических средах (вода, туман, атмосферная дымка) и может быть использовано в системах лазерной локации для обнаружения и распознавания различных объектов, например, подводных объектов.
Известно устройство для видения объектов - патент RU 2465619 С1, G01S 17/88 от 17.06.2011 опубл. 27.10.2012 бюл. №30. Устройство содержит размещенные в герметичном корпусе с оптическими окнами передающий канал, образованный последовательно установленными источником лазерного излучения, телескопом, блоком сканирования лазерным пучком, выходной оптической системой и основной приемный канал, образованный входной оптической системой, содержащей поляризационный фильтр, интерференционный светофильтр и линзу, фотоприемником с узлом стробирования, усилителем и пиковым детектором, при этом передающий и основной приемный каналы подключены к блоку управления и обработки информации, а также содержащее аналогичный по составу основному приемному каналу дополнительный приемный канал, причем поляризационные фильтры входной оптической системы основного и дополнительного приемного каналов вынесены за пределы герметичного корпуса перед соответствующими каналам интерференционными фильтрами, при этом плоскость поляризации поляризационного фильтра дополнительного приемного канала повернута относительно плоскости поляризации поляризационного фильтра основного приемного канала.
Известно также устройство для видения подводных объектов - RU 2397510 С2, G01S 17/88 от 07.07.2008, опубл. 20.08.2010 бюл. №23 (прототип). Устройство содержит передающий канал в виде источника лазерного импульса, блока сканирования лазерным пучком в двух взаимно ортогональных направлениях, выходной оптической системы с фокусирующим объективом-трансфокатором, а также приемный канал в виде входной оптической системы с поляризационным фильтром, фотоприемника с узлом стробирования и усилителя, причем за усилителем размещен пиковый детектор, регистрирующий максимум сигнала на переднем фронте, отраженного от объекта импульса, а передающий и приемный каналы подключены к блоку управления и обработки информации.
Недостатком аналогов и прототипа является то, в случае малого коэффициента отражения зондирующего лазерного импульса от объекта, а также при повышенных уровнях рассеяния водой лазерного излучения, превышение отраженного от объекта принимаемого лазерного импульса на фоне рассеянного водой излучения настолько мало, что может быть принято решение об отсутствии объекта в засвечиваемой области пространства. Это приведет к снижению надежности обнаружения объекта.
Целью изобретения является увеличение дальности видения и улучшение качества изображения подводных объектов.
Поставленная цель достигается тем, что устройство для видения подводных объектов выполнено в виде двух блоков, причем в первый блок входит передающий канал, а во второй блок приемный канал, передающий канал состоит из источника зондирующего импульсно-периодического лазерного излучения последовательно соединенного с телескопом, устройством сканированного лазерного пучка и выходной оптической системой, а приемный блок состоит из входной оптической системы, состоящей из узкополосного светофильтра, поляризационного фильтра и линзы, соединенных последовательно с фотоприемником с узлом стробирования, усилителем, устройством дифференцирования, первым пиковым детектором, подключенным к выходу усилителя и вторым пиковым детектором, подключенным к выходу устройства дифференцирования, причем пиковые детекторы выходами соединены с устройством управления и обработки принимаемых сигналов, которое имеет выходы на передающий и приемный канал, причем в передающем канале устройство управления запускает процессы генерирования лазерного импульса в лазере и сканирования лазерным пучком в устройстве сканирования, а в приемном канале устройство управления и обработки принимаемых сигналов в соответствии с ожидаемой дальностью до подводного объекта синхронизирует моменты запирания и отпирания (стробирования) фотоприемника и пиковых детекторов с моментом излучения лазерного импульса лазером, при этом устройство сканирования лазерным пучком выполнено в виде двух взаимно ортогональных акустооптических дефлекторов, а выходная оптическая система для сканирующего лазерного пучка образована фокусирующим объективом и объективом-трансфокатором, а входная оптическая система содержит узкополосный светофильтр, поляризационный фильтр и объектив, фокусирующий световой поток на фоточувствительную поверхность многоэлементной фоточувствительной матрицы фотоприемника.
Сущность изобретения иллюстрируется чертежами фиг. 1 и фиг. 2.
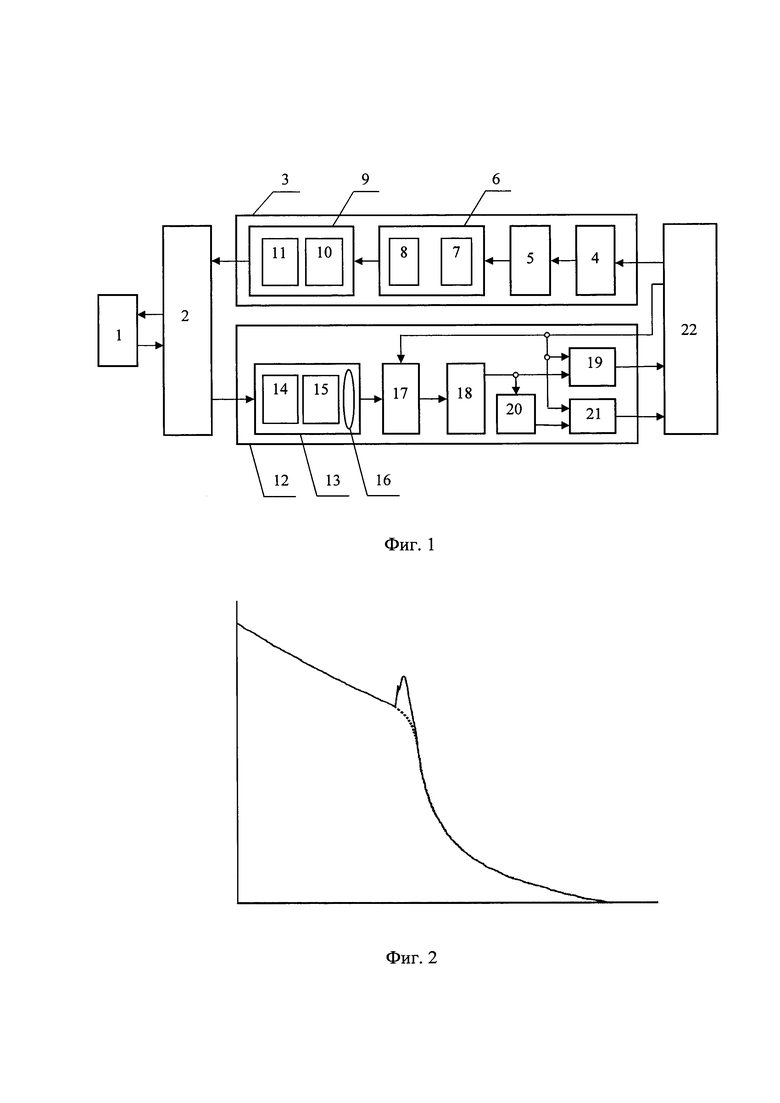
На фиг. 1 представлена схема устройства для видения подводных объектов, где приняты следующие обозначения:
1 - подводный объект.
2 - рассеивающая свет оптическая среда (морская вода).
3 - передающий канал.
4 - источник импульсного лазерного излучения (лазер).
5 - телескоп.
6 - устройство сканирования лазерным пучком.
7 - акустооптический дефлектор сканирования по координате Y.
8 - акустооптический дефлектор сканирования по координате X.
9 - выходная оптическая система.
10 - фокусирующий объектив.
11 - объектив-трансфокатор.
12 - приемный канал.
13 - входная оптическая система.
14 - узкополосный светофильтр.
15 - поляризационный фильтр.
16 - линза.
17 - фотоприемник с узлом стробирования.
18 - усилитель.
19 - первый пиковый детектор.
20 - устройство дифференцирования.
21 - второй пиковый детектор.
22 - устройство управления и обработки принимаемых сигналов.
На фиг. 2 показаны эпюры принимаемых сигналов на выходе усилителя 18. Сплошная кривая соответствует наличию отраженного от объекта лазерного импульса, а пунктирная кривая - отсутствию отражения от объекта зондирующего лазерного излучения из-за его поглощения подводным объектом.
Устройство, представленное на фиг. 1, включает в свой состав: передающий канал 3 в виде источника зондирующего импульсно-периодического лазерного излучения 4, телескопа 5, устройства сканирования лазерным пучком 6, выходной оптической системы 9; приемный канал 12 в виде входной оптической системы 13, фотоприемника с узлом стробирования 17, усилителя 18, устройства дифференцирования 20 и первого пикового детектора 19, подключенного к выходу усилителя 18, второго пикового детектора 21 на выходе устройства дифференцирования 20; причем пиковые детекторы 19 и 21 выходами соединены с устройством управления и обработки принимаемых сигналов 22, который имеет выходы на передающий канал 3 и приемный канал 12. В передающем канале 3 устройство управления 22 запускает процессы генерирования лазерного импульса в лазере 4 и сканирования лазерным пучком в блоке сканирования 6. В приемном канале 12 устройства управления и обработки принимаемых сигналов 22 в соответствии с ожидаемой дальностью до подводного объекта 1 синхронизирует моменты запирания и отпирания (стробирования) фотоприемника 17 и пиковых детекторов 19 и 21 с моментом излучения лазерного импульса лазером 4. Устройство сканирования лазерным пучком 6 выполнено в виде двух взаимно ортогональных акустооптических дефлекторов 7 и 8, а выходная оптическая система 9 для сканирующего лазерного пучка образована фокусирующим объективом 10 и объективом-трансфокатором 11. Входная оптическая система 13 содержит узкополосный светофильтр 14, поляризационный фильтр 15 и объектив 16, фокусирующий световой поток на фоточувствительную поверхность многоэлементной фоточувствительной матрицы фотоприемника 17.
Работа устройства для видения подводных объектов.
Заданный сектор пространства, в котором находится подводный объект 1, дискретно и попиксельно сканируют по двум ортогональным координатам зондирующим импульсно-периодическим лазерным пучком с расходимостью 0,05-0,2° с возможностью изменения угла сектора обзора от 2 до 25°. При формировании зондирующего изменяют углы сканирования от 2° до 25°, а также регулируют расходимость лазерного пучка. Угловой размер одного засвечиваемого пикселя изображения объекта соответствует угловому размеру диаграммы направленности (расходимости) лазерного пучка.
Отраженное от подводного объекта 1 излучение после обратного прохода через рассеивающую свет воду 2 поступает в приемном канале 12 во входную оптическую систему 13, в которой оно подвергается спектральной селекции рабочей длины излучения посредством узкополосного светофильтра 14 и поляризационной селекции посредством поляризационного фильтра 15, обеспечивающего подавление помехи от засветки обратного рассеяния водой. Объектив 16 обеспечивает совмещение поля зрения входной оптической системы 13 со сканируемой областью пространства и фокусировку принимаемого излучения на фоточувствительной поверхности многоэлементного фотоприемника 17.
Для устранения мешающего воздействия мощной фоновой засветки обратного рассеивания водой, которая проявляется перед регистрацией полезного сигнала, используют стробирование фотоприемника 17, осуществляемое синхронно с излучением лазерного импульса. При стробировании фотоприемник 17 запирается с момента излучения зондирующего импульса и отпирается в момент, непосредственно предшествующий ожидаемому приходу отраженного от подводного объекта 1 полезного сигнала.
Регистрацию интенсивности излучения, отраженного от подводного объекта 1, осуществляют многоэлементным фотоприемником 17 (матрицей) с общим полем зрения, охватывающем сектор обзора пространства, в котором производится поиск или наблюдение подводного объекта 1. Размер поля зрения каждого элемента фотоприемника 17, размещенного в фокальной плоскости объектива 16 фотоприемника, равен или превышает размер диаграммы направленности лазерного пучка зондирующего излучения. В качестве выходного сигнала фотоприемника 17 используют выходной сигнал с того элемента его, который соответствует направлению лазерного пучка на подводный объект 1, то есть каждому засвечиваемому пикселю соответствует определенный элемент фотоприемника 17 в фокальной плоскости объектива 16. При предварительной обработке зарегистрированного отраженного сигнала снижают влияние рассеяния вперед на контрастность и детализацию изображения посредством выделения первым пиковым детектором 19 максимального значения амплитуды сигнала фотоприемника 17, имеющего место на переднем фронте принимаемого импульса и соответствующего моменту прихода нерассеянных фотонов, отраженных от подводного объекта 1 в направлении на источник зондирующего излучения.
Новым в заявленном устройстве для видения объектов является то, что дополнительно к обнаружению объекта по отраженному от него сигналу производят обнаружение объекта и по максимальной крутизне спада излучения, обратно рассеянного водой. Для этого используют второй пиковый детектор 21, на вход которого подают принимаемый фотоприемником 17 сигнал через устройство дифференцирования 20. Это дополнительное обнаружение используют в случаях пропуска обнаружения по сигналу на переднем фронте отраженного от объекта импульса, которое может происходить вследствие малого коэффициента отражения от объекта или повышенного рассеяния лазерного излучения водой, то есть когда мощность сигнала, отраженного от объекта, настолько мала по отношению к мощности рассеянного водой излучения, что обнаружение объекта по отраженному от объекта излучению не происходит. Второй пиковый детектор 21 обнаруживает и фиксирует момент максимальной крутизны спада сигнала на заднем фронте принимаемого сигнала и соответствующую этому моменту наиболее резкую границу начала формирования теневой области за поверхностью подводного объекта 1.
С выхода пиковых детекторов 19 и 21 сигнал подают в устройство управления и обработки принимаемых сигналов 22. Этим устройством обеспечивают управление моментом излучения импульса в лазере 4, сканированием в блоке сканирования 6, расходимостью лазерного пучка в выходной оптической системе 9, стробированием фотоприемника 17, работой пиковых детекторов 19 и 21, а также формирование образа объекта по совокупности сигналов, поступающих с пиковых детекторов 19 и 21.
Таким образом, предложенное изобретение по разработке устройства видения подводных объектов состоит в том, что когда не обнаруживается отраженное от объекта лазерное излучение, его обнаружение и регистрацию производят по максимальной крутизне спада рассеянного оптической средой излучения и затем по упомянутым регистрируемым сигналам формируют образ подводного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397510C2 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ОБЪЕКТОВ В МУТНЫХ ОПТИЧЕСКИХ СРЕДАХ | 2011 |
|
RU2465619C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| ГОЛОГРАФИЧЕСКОЕ ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1990 |
|
SU1813298A3 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
Использование: изобретение относится к системам лидаров и лазерного видения объектов в рассеивающих свет оптических средах (вода, туман, атмосферная дымка) и может быть использовано в системах лазерной локации для обнаружения и распознавания различных объектов, например, подводных объектов. Сущность: устройство для видения подводных объектов включает сканирование объектов импульсным лазерным излучением с узкой диаграммой направленности, подавление помехи обратного рассеяния поляризационной фильтрацией и стробированием фотоприемника, обнаружение отраженного от объекта лазерного импульса и регистрацию максимального значения амплитуды на переднем фронте принимаемого импульса. Новизна заявленного устройства состоит в том, что когда не обнаруживается отраженное от объекта лазерное излучение, его обнаружение и регистрацию производят по максимальной крутизне спада рассеянного оптической средой излучения и затем по упомянутым регистрируемым сигналам формируют образ подводного объекта. Технический результат: повышение надежности, увеличение дальности видения и улучшение качества изображения подводных объектов. 2 ил.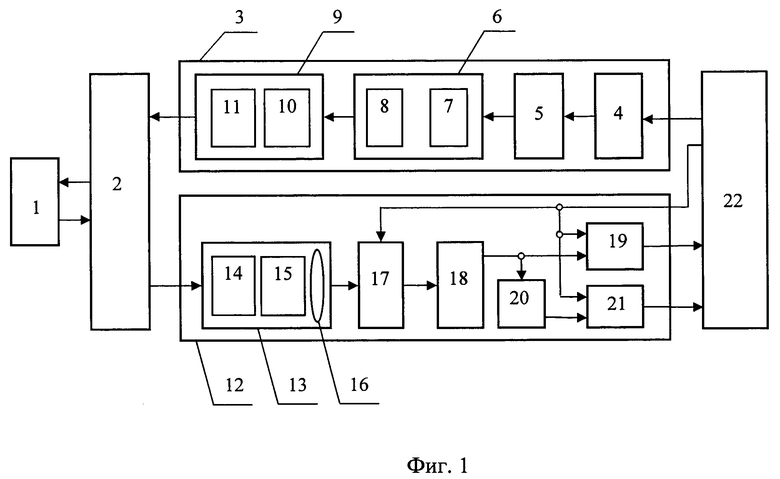
Устройство для видения подводных объектов выполнено в виде двух блоков, причем в первый блок входит передающий канал, а во второй блок приемный канал, передающий канал состоит из источника зондирующего импульсно-периодического лазерного излучения последовательно соединенного с телескопом, устройством сканированного лазерного пучка и выходной оптической системой, а приемный блок состоит из входной оптической системы, состоящей из узкополосного светофильтра, поляризационного фильтра и линзы, соединенных последовательно с фотоприемником с узлом стробирования, усилителем, устройством дифференцирования, первым пиковым детектором, подключенным к выходу усилителя и вторым пиковым детектором, подключенным к выходу устройства дифференцирования, причем пиковые детекторы выходами соединены с устройством управления и обработки принимаемых сигналов, которое имеет выходы на передающий и приемный каналы, причем в передающем канале устройство управления запускает процессы генерирования лазерного импульса в лазере и сканирования лазерным пучком в устройстве сканирования, а в приемном канале устройство управления и обработки принимаемых сигналов в соответствии с ожидаемой дальностью до подводного объекта синхронизирует моменты запирания и отпирания (стробирования) фотоприемника и пиковых детекторов с моментом излучения лазерного импульса лазером, при этом устройство сканирования лазерным пучком выполнено в виде двух взаимно ортогональных акустооптических дефлекторов, выходная оптическая система для сканирующего лазерного пучка образована фокусирующим объективом и объективом-трансфокатором, а входная оптическая система содержит узкополосный светофильтр, поляризационный фильтр и линзу, фокусирующую световой поток на фоточувствительную поверхность многоэлементной фоточувствительной матрицы фотоприемника.
| СПОСОБ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397510C2 |
| УСТРОЙСТВО ДЛЯ ВИДЕНИЯ ОБЪЕКТОВ В МУТНЫХ ОПТИЧЕСКИХ СРЕДАХ | 2011 |
|
RU2465619C1 |
| US 6400396 B1, 04.06.2002 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ОСНОВЫ ДЛЯ ПИТАТЕЛЬНЫХ СРЕД ДЛЯ ВЫРАЩИВАНИЯ МИКРООРГАНИЗМОВ | 1990 |
|
RU2022008C1 |

