Изобретение относится к радиолокации, а именно к радиолокационным методам определения параметров морского волнения, и может быть использовано в метеорологии и океанологии для дистанционного мониторинга состояния приповерхностного слоя океанов со спутника.
Обеспечение оперативного мониторинга состояния приповерхностного слоя океана со спутника в возможно более широкой полосе обзора является важным для составления достоверных прогнозов погоды, контроля за глобальными изменениями климата, обеспечения безопасности жизнедеятельности в прибрежных районах, изучения Мирового океана и решения множества других задач. При этом для действительно оперативного мониторинга желательно обеспечить построение с достаточным пространственным разрешением двумерного изображения водной поверхности, для чего необходимо определить (восстановить) в каждой «i»-й элементарной ячейке полосы обзора дисперсию наклонов  водной поверхности и направление распространения крупномасштабного волнения φwi, а также восстановить в каждой ячейке скорость ветра V.
водной поверхности и направление распространения крупномасштабного волнения φwi, а также восстановить в каждой ячейке скорость ветра V.
Известен способ определения параметров водной поверхности со спутника радиолокатором, оснащенным антенной с многолучевой (6 лучей) диаграммой направленности (C.Tison, D.Hauser, G.Carayan et al. A spaceborne radar for directional wave spectrum estimation: first performance simulations. Proceedings of IGARSS'08). Данный способ состоит в том, что с помощью многолучевой антенны излучают независимые последовательности коротких зондирующих импульсов в разных направлениях: первый луч (последовательность импульсов) направляют по нормали (т.е. в надир) к подстилающей водной поверхности, направление второго луча составляет 2° по отношению к первому лучу и т.д. Последний луч направлен под 10°. Лучи со 2 по 6 вращают вокруг вертикальной оси при движении спутника. На водной поверхности лучи освещают пятна (оставляют след) с характерными размерами примерно 17,7×17,7 км, а расстояние между пятнами (т.е. радиус участка, с которого собирают информацию) при высоте орбиты спутника порядка 500 км составляет 88 км. Отраженную назад от водной поверхности часть мощности каждого зондирующего импульса всех лучей принимают соответствующей антенной и записывают форму принимаемых отраженных импульсов. При сеансах связи эту информацию передают на станцию слежения, на которой с помощью компьютера проводят обработку принятых импульсов. Принятую последовательность импульсов первого луча обрабатывают по известным алгоритмам, применяемым в спутниковых альтиметрах (см., например, Alfred R. Zieger et al. NASA Radar Altimeter for TOPEX/POSEIDON Project, Proceedings of the IEEE, Vol.79, №6, June 1991). По максимальному значению принятой мощности Pmax каждого отраженного импульса (по форме импульса) определяют сечение обратного рассеяния σ0, по которому определяют (восстанавливают) величину скорости V приповерхностного ветра. При этом скорость ветра V восстанавливают с систематической ошибкой, обусловленной неоднозначностью связи между отраженной мощностью Pmax и скоростью ветра V, поскольку известно, что отраженная мощность зависит также и от дисперсии наклонов  морской поверхности, которая в свою очередь зависит от присутствия волн зыби, не связанных с ветром в точке измерения. По наклону переднего фронта каждого принятого импульса определяют высоту Н значительного волнения в освещенном пятне. Принятые последовательности импульсов для 2-6 лучей обрабатывают, как в самолетном измерителе спектра волн, однако перенос данного радиолокатора на спутник существенно ухудшает его пространственное разрешение, поскольку позволяет измерять лишь спектр волн, длина которых более 70 м, а высота - более 2 м, т.е. теряется информация о высоте и наклонах волн короче 70 м. К недостаткам данного способа относится и то, что в основу всех расчетов положено предположение об однородности волнения в пятне (элементе разрешения) с радиусом 88 км, что является некорректным с точки зрения океанологов, поскольку современные стандартные модели открытого океана используют сетку с элементом разрешения (элементарной ячейкой) для открытого океана 50×50 км и для прибрежных районов 28×28 км (см., например, «Satellites, Oceanography and Society», ed. by D.Halpem. Elsevier, Amsterdam, p.35-56, 2000).
морской поверхности, которая в свою очередь зависит от присутствия волн зыби, не связанных с ветром в точке измерения. По наклону переднего фронта каждого принятого импульса определяют высоту Н значительного волнения в освещенном пятне. Принятые последовательности импульсов для 2-6 лучей обрабатывают, как в самолетном измерителе спектра волн, однако перенос данного радиолокатора на спутник существенно ухудшает его пространственное разрешение, поскольку позволяет измерять лишь спектр волн, длина которых более 70 м, а высота - более 2 м, т.е. теряется информация о высоте и наклонах волн короче 70 м. К недостаткам данного способа относится и то, что в основу всех расчетов положено предположение об однородности волнения в пятне (элементе разрешения) с радиусом 88 км, что является некорректным с точки зрения океанологов, поскольку современные стандартные модели открытого океана используют сетку с элементом разрешения (элементарной ячейкой) для открытого океана 50×50 км и для прибрежных районов 28×28 км (см., например, «Satellites, Oceanography and Society», ed. by D.Halpem. Elsevier, Amsterdam, p.35-56, 2000).
Наиболее близким к заявленному способу по технической сущности является панорамный радиолокационный способ определения дисперсии наклонов водной поверхности, направления распространения крупномасштабного волнения и скорости приповерхностного ветра над водной поверхностью со спутника с помощью радиолокатора с ножевой диаграммой направленности антенны, вращающейся во время полета вокруг вертикальной оси, который выбран в качестве прототипа (патент РФ №2274877, МПК7 G01S 13/95, опубл. 20.04.2006 г.). Способ-прототип заключается в том, что с помощью однолучевой вращающейся антенны с ножевой диаграммой направленности, т.е. узкой (1-2°) вдоль одной оси и широкой (20-25°) в перпендикулярном направлении, осуществляют зондирование морской поверхности при нулевом угле падения, что соответствует углам падения примерно от -12 до 12° в пределах диаграммы направленности антенны. Это позволяет получить широкую (порядка 350 км при высоте полета 800 км) полосу обзора, т.е. осуществить панорамный режим работы радиолокатора. Этой же антенной радиолокатора принимают последовательность отраженных импульсов, с помощью регистрирующего устройства записывают их форму и передают информацию на станцию слежения. Для обработки полученной информации используют доплеровскую или временную селекцию по дальности, с помощью которой формируют элемент разрешения, например, 14×14 км. Для восстановления скорости ветра применяют двухпараметрический алгоритм, описывающий зависимость скорости ветра от сечения обратного рассеяния и от дисперсии наклонов, который получают методом регрессионного анализа измеряемых со спутника данных о величине сечения обратного рассеяния σ0, восстановленной дисперсии наклонов водной поверхности и буйковых данных о соответствующих скоростях приповерхностного ветра V.
Недостатком способа-прототипа является то, что при вращении антенны каждая элементарная рассеивающая ячейка наблюдается не все время, а только под 6 азимутальными углами (при частоте вращения 6 оборотов в минуту). Это приводит к высокому уровню шумов, связанных с недостаточным усреднением.
Задачей, на решение которой направлено настоящее изобретение, является разработка панорамного радиолокационного способа определения состояния приповерхностного слоя океана, обеспечивающего более точное, чем в существующих способах, измерение в каждой «i»-й элементарной рассеивающей ячейке широкой полосы обзора следующих параметров: дисперсии наклонов водной поверхности, направления распространения φwi крупномасштабного волнения, а также более точное восстановление скорости V приповерхностного ветра за счет увеличения времени наблюдения за каждой элементарной рассеивающей ячейкой.
Технический результат в разработанном способе достигается тем, что, как и в способе-прототипе, осуществляют излучение зондирующих импульсов микроволнового диапазона когерентным доплеровским радиолокатором, снабженным однолучевой антенной с ножевой диаграммой направленности, прием отраженных от водной поверхности зондирующих импульсов микроволнового диапазона, регистрацию их формы, выделение с помощью временной селекции по дальности с учетом знака доплеровского сдвига из освещаемого каждым зондирующим импульсом пятна на водной поверхности с размерами, например, 14×355 км элементарных рассеивающих ячеек с размерами, например, 14×14 км, определение сечения обратного рассеяния, дисперсии наклонов водной поверхности и направления распространения крупномасштабного волнения φwi в каждой «i»-й элементарной рассеивающей ячейке, а также последующее вычисление скорости приповерхностного ветра V по полученному методом регрессии алгоритму.
Новым в разработанном способе является то, что ориентированную вдоль направления полета ножевую диаграмму направленности антенны качают относительно вертикали в направлении, перпендикулярном направлению движения, а для определения сечения обратного рассеяния и дисперсии наклонов водной поверхности вдоль направления движения для каждой элементарной рассеивающей ячейки используют в пределах каждого освещаемого очередным зондирующим импульсом пятна на водной поверхности в широкой полосе обзора процедуру синтезирования, состоящую в том, что для каждой «i»-й элементарной рассеивающей ячейки в последовательные моменты времени за все время ее наблюдения определяют угол падения излучения и соответствующее сечение обратного рассеяния σi, после чего при обработке собранной информации упомянутые последовательные во времени измерения сечений обратного рассеяния σi «i»-й элементарной рассеивающей ячейки трансформируют в одномоментное наблюдение этой же «i»-й элементарной рассеивающей ячейки на всем упомянутом освещенном пятне под разными углами, синтезируя тем самым сечение обратного рассеяния σ0у для всего освещенного пятна в гипотетическом случае волнения, однородного в пределах всего этого пятна,  , при этом дисперсию наклонов поверхности в направлении полета определяют из соотношения
, при этом дисперсию наклонов поверхности в направлении полета определяют из соотношения  , где δ - ширина (в радианах) диаграммы направленности антенны на уровне 0,5 по мощности; σ0у - сечение обратного рассеяния, полученное при синтезировании; σ0,max - сечение обратного рассеяния, соответствующее центральной области освещенного пятна.
, где δ - ширина (в радианах) диаграммы направленности антенны на уровне 0,5 по мощности; σ0у - сечение обратного рассеяния, полученное при синтезировании; σ0,max - сечение обратного рассеяния, соответствующее центральной области освещенного пятна.
В частном случае осуществления способа измерения средней длины волны Lm крупномасштабного волнения в каждой «i»-й элементарной рассеивающей ячейке полосы обзора вначале по доплеровским скоростям с помощью дополнительных частотных фильтров, установленных в доплеровском радиолокаторе, создают начальную точку отсчета для регистрации отраженных импульсов в каждой «i»-й элементарной рассеивающей ячейке, после этого прием отраженных от водной поверхности импульсов и регистрацию их формы с помощью упомянутой временной селекции проводят для каждой «i»-й элементарной рассеивающей ячейки отдельно и стандартным алгоритмом по тангенсу угла наклона в средней точке переднего фронта импульса, зарегистрированного в данной «i»-й ячейке, определяют высоту Н значительного волнения для нескольких азимутальных направлений в этой «i»-й ячейке, затем определяют уточненное значение высоты H значительного волнения в «i»-й элементарной рассеивающей ячейке полосы обзора путем определения среднего значения высоты Н по нескольким упомянутым измерениям в данной ячейке, после чего по измеренному максимальному значению дисперсии наклонов  в «i»-й элементарной рассеивающей ячейке на графике азимутальной зависимости дисперсии наклонов
в «i»-й элементарной рассеивающей ячейке на графике азимутальной зависимости дисперсии наклонов  и по уточненному значению высоты Н значительного волнения среднюю длину волны Lm крупномасштабного волнения определяют из соотношения Lm=H/σSm.
и по уточненному значению высоты Н значительного волнения среднюю длину волны Lm крупномасштабного волнения определяют из соотношения Lm=H/σSm.
Способ поясняется следующими рисунками.
На фиг.1 представлен вариант блок-схемы устройства для реализации разработанного способа.
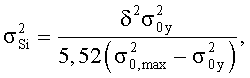
На фиг.2 показан пример разбиения полосы обзора на элементарные рассеивающие ячейки внутри освещенного пятна.
Блок-схема устройства для реализации разработанного способа, представленная на фиг.1, содержит однолучевую антенну 1 с ножевой диаграммой направленности, которая через блок электронного управления сканированием диаграммы направленности 2 соединена с когерентным доплеровским радиолокатором 3, который в свою очередь соединен с регистрирующим устройством 4, выход которого соединен со входом приемопередающего устройства 5, обеспечивающего связь со станцией слежения (на чертеже не показана) на Земле. При этом управление всеми элементами устройства для реализации разработанного способа осуществляется с помощью блока 6, который имеет соединение с блоком электронного управления сканированием диаграммы направленности 2, с когерентным доплеровским радиолокатором 3, регистрирующим устройством 4 и приемо-передающим устройством 5.
В качестве однолучевой антенны 1 с ножевой диаграммой направленности может быть использована, например, фазированная антенная решетка, разработанная НИИ ТП (Москва). В этом случае управление режимом качания осуществляется электронным способом. Также для реализации разработанного способа может быть использована однолучевая щелевая антенна МИУС отечественного производства или однолучевая щелевая антенна PR-5 чешского производства (фирма TESLA). Здесь ножевая диаграмма направленности антенны обеспечивается за счет выбора размеров щели, например может быть сформирована ножевая диаграмма направленности с угловыми размерами 1°×25°. В данном случае режим качания в перпендикулярном направлению движения направлении осуществляется механически.
При высоте полета 800 км такая антенна освещает пятно на поверхности океана с размерами 14×355 км. Частота сканирования относительно вертикальной оси происходит, например, с частотой 0,5 Гц.
В качестве когерентного доплеровского радиолокатора 3 может быть использован, например, доплеровский измеритель скорости и сноса ДИИС (г. Каменск-Уральский) или доплеровский радиолокатор, изготавливаемый в НИИ ТП г. Москва. В качестве регистрирующего устройства 4 и приемо-передающего устройства 5 могут быть использованы любые стандартные устройства подобного назначения, эксплуатируемые на спутниках в настоящее время для записи информации и передачи ее на Землю.
Разработанный панорамный радиолокационный способ определения параметров состояния приповерхностного слоя океана осуществляют следующим образом.
В ходе полета спутника над океаном посредством однолучевой антенны 1 с ножевой диаграммой направленности, управляемой блоком электронного управления сканированием диаграммы направленности 2, и когерентного доплеровского радиолокатора 3, управляемых с помощью блока 6, излучают последовательность зондирующих импульсов по нормали к водной поверхности. При качании ножевой диаграммы направленности с указанными угловыми размерами 1°×25° и частотой качания 0,5 Гц на водной поверхности освещают полосу обзора шириной 355 км (для указанной высоты полета 800 км), что позволяет получить изображение происходящего на поверхности океана процесса. При этом каждый отдельный импульс излучения когерентного доплеровского радиолокатора 3 освещает при указанной высоте полета пятно с размерами порядка 14×355 км. Посредством этих же однолучевой антенны 1 с ножевой диаграммой направленности и когерентного доплеровского радиолокатора 3 принимают последовательность отраженных от водной поверхности импульсов, которые обрабатывают и запоминают в регистрирующем устройстве 4 до очередного сеанса связи со станцией слежения на Земле. С помощью приемо-передающего устройства 5 осуществляют обмен информацией со станцией слежения, при этом принятые команды поступают в блок 6, с помощью которого координируют работу всего устройства для реализации разработанного способа.
Обработка с помощью регистрирующего устройства 4 отраженных от водной поверхности зондирующих импульсов заключается в том, что с помощью временной селекции по дальности с учетом знака доплеровского сдвига делят каждое упомянутое пятно, освещенное отдельным зондирующим импульсом, с размерами 14×355 км на элементарные «i»-е (i меняется от 1 до N) рассеивающие ячейки, т.е. деление освещенного пятна проводят вдоль оси Y для каждого угла падения (см. фиг.2).
Применение вместо вращения антенны вокруг вертикальной оси (как в способе-прототипе) режима качания диаграммы направленности антенны в направлении, перпендикулярном направлению движения, с размахом, например, ±12° дает предлагаемому способу существенные преимущества.
Например, при полосе обзора 355 км для высоты полета спутника 800 км и диаграммы направленности 1°×25° элементарная рассеивающая ячейка имеет размер 14×14 км (размер элементарной рассеивающей площадки зависит от решаемой задачи и может варьироваться в широких пределах) и формируется диаграммой направленности антенны (вдоль оси X) и с помощью временной селекции по дальности с учетом знака доплеровского сдвига (вдоль оси Y). Если внутри диаграммы направленности задать шаг по углу в 1°, то для ширины диаграммы направленности 25° получим 25 элементарных ячеек размером 14×14 км. При частоте качания (сканирования) 0,5 Гц каждая ячейка будет наблюдаться примерно 0,1 с, что соответствует времени корреляции сигнала, отраженного морской поверхностью. За 2 с радиолокатор смещается примерно на 14 км, что соответствует размеру элементарной рассеивающей площадки, и таким образом происходит «обзор» всей отражающей поверхности без пропусков, что снимает проблему с недостаточностью усреднения значений измеряемых величин.
Кроме того, поскольку для каждой элементарной рассеивающей ячейки проводят измерения под всеми углами падения в пределах диаграммы направленности антенны, то в процессе обработки полученной данным способом информации применимы алгоритмы, разработанные как для неподвижной, так и для вращающейся антенны. В данном случае используются преимущества неподвижной антенны, связанные с оригинальной процедурой синтезирования вдоль траектории полета, и возможности радиолокатора с вращающейся антенной, обладающего широкой полосой обзора. Алгоритмы обработки основаны на разных принципах, и сравнение результатов восстановления дисперсии наклонов водной поверхности с помощью одного и другого алгоритмов дает возможность контролировать их эффективность, а также исключать из рассмотрения и обработки резкие флуктуации значений измеряемых величин, которые «выпадают» из общей картины наблюдений и вызваны случайными помехами, например метеорологическими, или сбоем питания.
Таким образом, обработку отраженного сигнала и восстановление параметров волнения осуществляют в соответствии с определенными алгоритмами.
При анализе ячеек вдоль оси Y (вдоль направления движения) используют алгоритм, разработанный для неподвижной ножевой антенны (см. Караев В.Ю., Каневский М.Б. Радиолокационный способ определения параметров состояния приповерхностного слоя океана. - Патент РФ №2235344, МПК7 G01S 13/95, опубл. 03.06.2002 г.), ориентированной вдоль направления полета, и осуществляют процедуру синтезирования.
В пределах каждой рассеивающей ячейки с размерами, например, 14×14 км волнение можно считать однородным. Сечение обратного рассеяния σi каждой рассеивающей «i»-й ячейки периодически вычисляют в течение всего времени ее нахождения в зоне видимости спутника, при этом однолучевая антенна 1 с ножевой диаграммой направленности когерентного доплеровского радиолокатора 3 в разные моменты времени видит «i»-ю ячейку поверхности под разными углами падения θ. Если учесть стационарность волнения на временах измерения и объединить все данные о сечении обратного рассеяния «i»-й ячейки, полученные за все время ее наблюдения в разные моменты времени (или под разными углами падения), то определим сечение обратного рассеяния σ0у, полученное при измерении когерентным доплеровским радиолокатором 3 с однолучевой антенной 1 с ножевой диаграммой направленности в гипотетическом случае волнения, однородного в пределах всего упомянутого освещенного пятна . В результате выполнения такой процедуры синтезирования суммирующее изображение будет аналогично «одномоментному» наблюдению поверхности океана в освещенном пятне, но с однородным волнением в пределах всего этого пятна. При этом дисперсия наклонов поверхности в направлении полета определяется по следующей формуле:
,
где δ - ширина (в градусах) диаграммы направленности однолучевой антенны 1 с ножевой диаграммой направленности на уровне 0,5 по мощности; σ0у - сечение обратного рассеяния, полученное при синтезировании в пределах освещенного пятна, σ0,max - сечение обратного рассеяния, соответствующее центральной области освещенного пятна
Если из элементарной рассеивающей ячейки, расположенной на траектории полета, провести прямую под углом φwi (см. фиг.2), то для ячеек, расположенных вдоль данной прямой, можно применить алгоритм обработки, разработанный для радиолокатора с вращающейся антенной (см. Караев В.Ю., Каневский М.Б. Панорамный радиолокационный способ определения параметров состояния приповерхностного слоя океана со спутника. - Патент РФ №2274877, МПК7 G01S 13/95, опубл. 20.04.2006 г.). В данном случае используется тот факт, что соседние элементарные рассеивающие ячейки отличаются углом падения вдоль выбранного направления.
Для каждой «i»-й ячейки определяют мощность отраженного сигнала и сечение обратного рассеяния σi(θi), где θi - угол падения зондирующего излучения на «i»-ю ячейку. Эта информация хранится в регистрирующем устройстве 4 до сеанса связи со станцией слежения. Далее на станции слежения проводят коррекцию по мощности принятого сигнала от каждой «i»-й ячейки с учетом формы диаграммы направленности однолучевой антенны 1, которая принята гауссовой. Если для удобства рассмотрения ввести ось X1, направленную вдоль выбранного азимутального угла φ, и ось Y1, перпендикулярную оси X1, форма диаграммы направленности однолучевой антенны 1 задается следующим выражением:
 ,
,
где δх и δу - ширина диаграммы направленности на уровне 0,5 по мощности вдоль осей X1 и Y1 соответственно, R0 - высота полета спутника. Для коррекции умножают мощность отраженного сигнала в «i»-й элементарной ячейке (сечение обратного рассеяния σi) на коэффициент, связанный с диаграммой направленности однолучевой антенны 1. Формула перерасчета имеет следующий вид:
 .
.
После выполнения коррекции дисперсия наклонов вдоль направления зондирования (оси X1) вычисляется по следующей формуле:
 ,
,
где θi и θi+1 - углы падения для двух последовательных «i»-й и «i+1»-й элементарных ячеек вдоль направления зондирования (азимутального угла φj); σ0к(θi) и σ0к(θi+1) - скорректированные сечения обратного рассеяния этих ячеек соответственно, j - номер азимутального направления, под которым наблюдается каждая элементарная ячейка.
Как видно из приведенной формулы (в знаменателе формулы сечение обратного рассеяния σ0к(θi+1) в «i+1»-й ячейке делится на сечение обратного рассеяния σ0к(θi) в «i»-й ячейке), при обработке экспериментальных данных со спутника важны (используются) не абсолютные значения отраженной мощности (сечения обратного рассеяния) в каждой элементарной отражающей ячейке, а относительные изменения отраженной мощности в соседних ячейках. За счет этого в разработанном способе удается избавиться от таких существенных проблем, как необходимость регулярной калибровки радиолокатора по мощности, необходимость учета ослабления отраженного сигнала дождевыми облаками, необходимость поддержания стабильной мощности радиолокатора в течение всего срока эксплуатации.
Известно, что с достаточной степенью точности полная дисперсия наклонов поверхности представляет собой сумму дисперсий наклонов, измеренных в двух взаимно перпендикулярных направлениях. Поэтому для определения полной дисперсии наклонов поверхности в каждой «i»-й элементарной ячейке измеряют дисперсию наклонов в этой ячейке под разными азимутальными углами φj. Таким образом, определив дисперсию наклонов для двух взаимно перпендикулярных направлений, определяют полную дисперсию наклонов для «i»-й ячейки из соотношения:  .
.
Следующим шагом при обработке данных является определение направления распространения φwi крупномасштабного волнения в «i»-й ячейке. Поскольку в каждой «i»-й ячейке дисперсия наклонов  определена для нескольких (разных) азимутальных углов φj, то по экспериментально измеренным точкам с помощью алгоритма, используемого в скаттерометрии, восстанавливают азимутальную зависимость дисперсии наклонов. Максимальное значение дисперсии на данном графике указывает искомое направление распространения крупномасштабного волнения φwi в «i»-й ячейке.
определена для нескольких (разных) азимутальных углов φj, то по экспериментально измеренным точкам с помощью алгоритма, используемого в скаттерометрии, восстанавливают азимутальную зависимость дисперсии наклонов. Максимальное значение дисперсии на данном графике указывает искомое направление распространения крупномасштабного волнения φwi в «i»-й ячейке.
Скорость приповерхностного ветра V в «i»-й ячейке определяют по измеренному с помощью регистрирующего устройства 4 в каждой ячейке сечению обратного рассеяния σi и по измеренным во взаимно перпендикулярных направлениях в каждой ячейке дисперсиям наклонов и  . Для вычисления искомой скорости ветра V используют регрессионный алгоритм
. Для вычисления искомой скорости ветра V используют регрессионный алгоритм  , который должен быть получен на начальном этапе калибровки радиолокатора по стандартной методике (см., например, Witter and Chelton. A Geosat altimeter wind speed algorithm and a method for altimeter wind speed algorithm development. J. Geophysical Research, v.96, NC5, 1995, p.8853-8860) с учетом упомянутых измеренных дисперсий наклонов и
, который должен быть получен на начальном этапе калибровки радиолокатора по стандартной методике (см., например, Witter and Chelton. A Geosat altimeter wind speed algorithm and a method for altimeter wind speed algorithm development. J. Geophysical Research, v.96, NC5, 1995, p.8853-8860) с учетом упомянутых измеренных дисперсий наклонов и  . Дисперсии наклонов и зависят не только от скорости ветра V, но и от присутствия в «i»-й ячейке волн зыби, не связанных с ветром в данной ячейке, но влияющих на связь сто со скоростью ветра V. Методика получения регрессионного алгоритма известна (см., например, Г.Корн и Т.Корн. Справочник по математике для научных работников и инженеров. М.: Наука, 1977 г., стр.553-557).
. Дисперсии наклонов и зависят не только от скорости ветра V, но и от присутствия в «i»-й ячейке волн зыби, не связанных с ветром в данной ячейке, но влияющих на связь сто со скоростью ветра V. Методика получения регрессионного алгоритма известна (см., например, Г.Корн и Т.Корн. Справочник по математике для научных работников и инженеров. М.: Наука, 1977 г., стр.553-557).
В частном случае реализации разработанного способа, когда необходимо измерить среднюю длину волны Lm крупномасштабного волнения в каждой элементарной «i»-й ячейке размерами, например, 14×14 км, вначале по доплеровским скоростям с помощью дополнительных частотных фильтров, установленных в приемном тракте когерентного доплеровского радиолокатора 3, создают начальную точку отсчета для регистрации отраженных импульсов в каждой «i»-й ячейке. После этого прием отраженных от водной поверхности импульсов и регистрацию зависимости мощности отраженного сигнала от времени (нахождение формы импульса) проводят для каждой «i»-й ячейки отдельно и стандартным алгоритмом по тангенсу угла наклона в средней точке переднего фронта импульса, зарегистрированного в «i»-й ячейке, определяют высоту Н значительного волнения для нескольких азимутальных направлений в «i»-й ячейке. Затем определяют уточненное значение высоты Н значительного волнения в «i»-й ячейке путем определения среднего значения высоты Н по нескольким измерениям в данной ячейке. После чего по упомянутому измеренному максимальному значению дисперсии наклонов «i»-й ячейке на графике азимутальной зависимости дисперсии наклонов и по уточненному значению высоты Н значительного волнения определяют среднюю длину волны Lm крупномасштабного волнения из соотношения Lm=H/σSm. Высота H и длина волны Lm крупномасштабного волнения имеют важное значение для численных моделей приповерхностного слоя океана, кроме того, от длины волны Lm напрямую зависит скорость распространения крупномасштабного волнения, т.е., например, насколько быстро зародившийся шторм достигнет прибрежной зоны.
Таким образом, разработанный панорамный радиолокационный способ определения параметров состояния приповерхностного слоя океана позволяет построить двумерное изображение водной поверхности, что открывает возможности для анализа волновых процессов на поверхности океана, изучения их структуры и временной динамики при повторных наблюдениях, что необходимо для составления долгосрочных прогнозов погоды, для изучения Мирового океана и решения множества других прикладных задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАНОРАМНЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2003 |
|
RU2274877C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2002 |
|
RU2235344C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВЗВОЛНОВАННОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2466425C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2562924C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КРУПНОМАСШТАБНОГО ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2501037C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕФТЯНЫХ ПЛЕНОК НА ВОДНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2529886C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ ОКЕАНСКИХ ЯВЛЕНИЙ ИЗ КОСМОСА | 2009 |
|
RU2447457C2 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее радиолокационным изображениям | 2023 |
|
RU2817178C1 |
| СПОСОБ ОПЕРАТИВНОГО ПОИСКА И ОБНАРУЖЕНИЯ ПОДВОДНОГО ИСТОЧНИКА ЗВУКА | 2018 |
|
RU2794213C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВОДНОГО ГИДРОДИНАМИЧЕСКОГО ИСТОЧНИКА ПО СКОРОСТНОМУ РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2703522C1 |

Изобретение может быть использовано в метеорологии и океанологии для дистанционного зондирования приповерхностного слоя океанов со спутника. Достигаемый технический результат изобретения - повышение точности определения параметров состояния приповерхностного слоя океана. Указанный результат достигается за счет того, что ножевую диаграмму направленности антенны качают относительно вертикали в направлении, перпендикулярном направлению движения, каждым зондирующим импульсом освещают на водной поверхности пятно с размерами порядка 14×355 км (при высоте полета 800 км). При приеме отраженных импульсов используют временную селекцию по дальности с учетом знака доплеровского сдвига для выделения в упомянутом пятне 14×355 км элементарных рассеивающих ячеек (ЭРЯ) с размерами, например, 14×14 км. Используя процедуру синтезирования вдоль направления движения спутника, определяют сечение обратного рассеяния и восстанавливают дисперсию наклонов водной поверхности в каждой ЭРЯ, затем, выбрав азимутальный угол, восстанавливают дисперсию наклонов водной поверхности вдоль данного направления и, анализируя азимутальную зависимость дисперсии наклонов в каждой ЭРЯ, определяют направление распространения волнения в каждой ячейке. Скорость приповерхностного ветра V в каждой ЭРЯ восстанавливают по полученному методом регрессии алгоритму. В частном случае реализации способа определяют также средние значения высоты значительного волнения и длины волны крупномасштабного волнения. 1 з.п. ф-лы, 2 ил.
1. Панорамный радиолокационный способ определения параметров состояния приповерхностного слоя океана со спутника, включающий излучение зондирующих импульсов микроволнового диапазона когерентным доплеровским радиолокатором, снабженным однолучевой антенной с ножевой диаграммой направленности, прием отраженных от водной поверхности зондирующих импульсов микроволнового диапазона, регистрацию их формы, выделение с помощью временной селекции по дальности с учетом знака доплеровского сдвига из освещаемого каждым зондирующим импульсом пятна на водной поверхности с размерами, например, 14×355 км элементарных рассеивающих ячеек с размерами, например, 14×14 км, определение сечения обратного рассеяния σi, дисперсии наклонов водной поверхности  и направления распространения крупномасштабного волнения φwi в каждой «i»-й элементарной рассеивающей ячейке, а также последующее вычисление скорости приповерхностного ветра V по полученному методом регрессии алгоритму, отличающийся тем, что ориентированную вдоль направления полета ножевую диаграмму направленности антенны качают относительно вертикали в направлении, перпендикулярном направлению движения, а для определения сечения обратного рассеяния и дисперсии наклонов водной поверхности вдоль направления движения для каждой элементарной рассеивающей ячейки используют в пределах каждого освещаемого очередным зондирующим импульсом пятна на водной поверхности в широкой полосе обзора процедуру синтезирования, состоящую в том, что для каждой «i»-й элементарной рассеивающей ячейки в последовательные моменты времени за все время ее наблюдения определяют угол падения излучения и соответствующее сечение обратного рассеяния σi, после чего при обработке собранной информации упомянутые последовательные во времени измерения сечений обратного рассеяния σi «i»-й элементарной рассеивающей ячейки трансформируют в одномоментное наблюдение этой же «i»-й элементарной рассеивающей ячейки на всем упомянутом освещенном пятне под разными углами, синтезируя тем самым сечение обратного рассеяния σ0у для всего освещенного пятна в гипотетическом случае волнения, однородного в пределах всего этого пятна,
и направления распространения крупномасштабного волнения φwi в каждой «i»-й элементарной рассеивающей ячейке, а также последующее вычисление скорости приповерхностного ветра V по полученному методом регрессии алгоритму, отличающийся тем, что ориентированную вдоль направления полета ножевую диаграмму направленности антенны качают относительно вертикали в направлении, перпендикулярном направлению движения, а для определения сечения обратного рассеяния и дисперсии наклонов водной поверхности вдоль направления движения для каждой элементарной рассеивающей ячейки используют в пределах каждого освещаемого очередным зондирующим импульсом пятна на водной поверхности в широкой полосе обзора процедуру синтезирования, состоящую в том, что для каждой «i»-й элементарной рассеивающей ячейки в последовательные моменты времени за все время ее наблюдения определяют угол падения излучения и соответствующее сечение обратного рассеяния σi, после чего при обработке собранной информации упомянутые последовательные во времени измерения сечений обратного рассеяния σi «i»-й элементарной рассеивающей ячейки трансформируют в одномоментное наблюдение этой же «i»-й элементарной рассеивающей ячейки на всем упомянутом освещенном пятне под разными углами, синтезируя тем самым сечение обратного рассеяния σ0у для всего освещенного пятна в гипотетическом случае волнения, однородного в пределах всего этого пятна,  при этом дисперсию наклонов
при этом дисперсию наклонов 
поверхности в направлении полета определяют из соотношения
где δ - ширина (в радианах) диаграммы направленности антенны на уровне 0,5 по мощности; σ0y - сечение обратного рассеяния, полученное при синтезировании, σ0,mах - сечение обратного рассеяния, соответствующее центральной области освещенного пятна.
2. Панорамный радиолокационный способ по п.1, отличающийся тем, что для измерения средней длины волны Lm крупномасштабного волнения в каждой «i»-й элементарной рассеивающей ячейке полосы обзора вначале по доплеровским скоростям с помощью дополнительных частотных фильтров, установленных в доплеровском радиолокаторе, создают начальную точку отсчета для регистрации отраженных импульсов в каждой «i»-й элементарной рассеивающей ячейке, после этого прием отраженных от водной поверхности импульсов и регистрацию их формы с помощью упомянутой временной селекции проводят для каждой «i»-й элементарной рассеивающей ячейки отдельно и стандартным алгоритмом по тангенсу угла наклона в средней точке переднего фронта импульса, зарегистрированного в данной «i»-й ячейке, определяют высоту Н значительного волнения для нескольких азимутальных направлений в этой «i»-й ячейке, затем определяют уточненное значение высоты Н значительного волнения в «i»-й элементарной рассеивающей ячейке полосы обзора путем определения среднего значения высоты Н по нескольким упомянутым измерениям в данной ячейке, после чего по измеренному максимальному значению дисперсии наклонов  в «i»-й элементарной рассеивающей ячейке на графике азимутальной зависимости дисперсии наклонов
в «i»-й элементарной рассеивающей ячейке на графике азимутальной зависимости дисперсии наклонов  и по уточненному значению высоты Н значительного волнения среднюю длину волны Lm крупномасштабного волнения определяют из соотношения Lm=H/σSm.
и по уточненному значению высоты Н значительного волнения среднюю длину волны Lm крупномасштабного волнения определяют из соотношения Lm=H/σSm.
| ПАНОРАМНЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2003 |
|
RU2274877C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2002 |
|
RU2235344C2 |
| RU 2003124710 A, 10.02.2005 | |||
| US 6137437 A, 24.10.2000 | |||
| УСТРОЙСТВО для СБОРКИ ЭЛЕКТРОЛИТИЧЕСКИХ КОНДЕНСАТОРОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 0 |
|
SU236653A1 |
| Пневматический молоток | 1971 |
|
SU455842A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХОЛОДА | 1994 |
|
RU2079798C1 |
| EP 1262792 A1, 04.12.2002. | |||

