Изобретение относится к радиолокации, а именно к радиолокационным методам определения параметров морского волнения, и может быть использовано в метеорологии и океанологии для дистанционного зондирования приповерхностного слоя океанов.
Для повышения достоверности долгосрочных прогнозов погоды, выбора оптимальных путей плавания судов, для безопасности жизнедеятельности в прибрежных районах, для океанографических исследований и др. важным (существенным) является одновременное определение дисперсии наклонов океанской поверхности, высоты значительного волнения и скорости приповерхностного ветра.
Достаточно давно известны способы определения состояния приповерхностного слоя океана, включая определение параметров волнения водной поверхности и скорости приповерхностного ветра с помощью микроволнового излучения импульсных радиолокаторов, переносимых с помощью такого летательного аппарата, как самолет (см., например, SU 2024034, М. Кл. G 01 S 13/95, заявлено 11.01.91; SU 2012903, М. Кл. G 01 S 13/95, заявлено 22.06.92; SU 1821771, М. Кл. G 01 S 13/95, заявлено 28.03.91; SU 1582849, М. Кл. G 01 S 13/95, заявлено 23.05.88 и др.). Однако использование такого носителя позволяет провести измерения лишь в очень ограниченной полосе или зоне Мирового океана и не обеспечивает оперативного и глобального обзора (в предельно широкой полосе просмотра), что является необходимым для точного метеорологического прогноза, выбора оптимальных путей плавания судов, океанографических исследований и других целей.
Более перспективным в настоящее время для указанных целей является определение (восстановление) параметров волнения водной поверхности океанов и скорости приповерхностного ветра с помощью импульсных радиолокаторов, установленных на спутниках (см., например, US 4918456, М. Кл. G 01 S 13/95, заявлено 1988 г.), хотя необходимо отметить, что спутниковый радиолокатор не может непосредственно измерить параметры волнения, он может лишь принять отраженный от водной поверхности сигнал, содержащий полезную информацию о параметрах волнения, которую еще необходимо из этого сигнала извлечь (восстановить параметры волнения), используя тот или иной алгоритм обработки радиолокационных данных.
Известен способ определения высоты значительного волнения океанической поверхности и скорости приповерхностного ветра со спутника, оснащенного антенной радиолокатора с двухлучевой диаграммой направленности (D.Hauser et all., "Swimsat: A Real-Aperture Radar to Measure Directional Spectra of Ocean Waves from Space - Main Characteristics and Performance Simulation", Journal of Atmospheric and Oceanic Technology, v. 18, p.p. 421-437). Данный способ состоит в том, что с помощью двухлучевой антенны излучают две независимые последовательности коротких зондирующих радиоимпульсов в разных направлениях: первый луч (последовательность радиоимпульсов) направляют по нормали (т.е. в надир) к подстилающей водной поверхности, направление второго луча составляет 10° по отношению к первому лучу и этот второй луч вращают при движении спутника по отношению к надиру. На водной поверхности оба луча освещают пятна (оставляют след) с характерными размерами 18×18 км, а расстояние между пятнами (т.е. радиус участка, с которого собирают информацию) при высоте орбиты спутника порядка 500 км составляет 88 км. Отраженную назад от водной поверхности часть мощности каждого зондирующего импульса обоих лучей принимают соответствующей антенной и записывают форму принимаемых радиоимпульсов. При сеансах связи эту информацию передают на станцию слежения, на которой с помощью компьютера проводят обработку принятых радиоимпульсов. Принятую последовательность радиоимпульсов первого луча обрабатывают по известному алгоритму, как в известных спутниковых альтиметрах (см., например, Alfred R.Zieger at all, NASA Radar Altimeter for TOPEX/POSEIDON Project, Proceedings of the IEEE, Vol. 79, №6, June 1991), в результате чего получают (восстанавливают) величины значительного волнения и скорости приповерхностного ветра, при этом скорость ветра восстанавливают с систематической ошибкой, обусловленной неоднозначностью связи между отраженной мощностью и скоростью ветра, поскольку известно, что отраженная мощность зависит также и от дисперсии наклонов водной поверхности, которая, в свою очередь, зависит от присутствия волн зыби, не связанных с ветром в точке измерения. Принятую последовательность радиоимпульсов второго луча обрабатывают как в самолетном измерителе спектра волн, однако перенос данного радиолокатора на спутник существенно ухудшает его разрешение, поскольку позволяет измерять лишь спектр волн, длина которых более 70 м, а высота более 2 м, т.е. теряется информация о высоте и наклонах волн короче 70 м. К недостаткам данного способа относится и то, что в основу всех расчетов положено предположение об однородности волнений в пятне (элементе разрешения) с радиусом 88 км, что является некорректным с точки зрения океанологов, поскольку современные стандартные модели открытого океана используют сетку с элементом разрешения для открытого океана 50×50 км и для прибрежных районов 28×28 км (см., например, "Satellites, Oceanography and Society" edited by D.Halpem. Elsevier, Amsterdam, p.p. 35-56, 2000).
Наиболее близким к заявленному способу по технической сущности является способ определения величины и направления скорости приповерхностного ветра над океанической поверхностью со спутника с помощью скаттерометра (радиолокатора для определения скорости ветра), который выбран в качестве прототипа (Chung-Chi Lin. at all. An Analysis of a Rotating, Range-Gated, Fanbeam Spaceborne Scatterometer Concept, IEEE Transactions on geoscience and remote sensing, Vol. 38, №5, September 2000). Способ - прототип заключается в том, что с помощью однолучевой вращающейся антенны с ножевой диаграммой направленности, т.е. узкой (1-3) в поперечном направлении и широкой протяженной (20-25°) в продольном направлении, осуществляют наклонное зондирование (при углах падения от 28 до 51°) водной поверхности, что позволяет получить широкую (порядка 1500 км) полосу обзора. Этой же антенной радиолокатора принимают последовательность отраженных радиоимпульсов, с помощью регистрирующего устройства записывают их форму и передают информацию на станцию слежения. Для обработки полученной информации используют временную селекцию по дальности, с помощью которой формируют элемент разрешения 50×50 км. Для восстановления скорости ветра (и его направления) применяется однопараметрический алгоритм, полученный методом регрессионного анализа скаттерометрических данных о величине сечения обратного рассеяния σ0 и буйковых данных о скорости ветра V, т.е. используется полученная опытным путем зависимость V=f(σ0).
Недостатком способа-прототипа является то, что он позволяет измерять (восстанавливать) только параметры ветра (скорость ветра и его направление) и не дает информацию о параметрах волнения водной поверхности (о высоте волн, наклонах водной поверхности и т.п.). При этом скорость ветра и его направление измеряют по способу - прототипу с систематической ошибкой, связанной с отсутствием информации о крупных волнах, влияющих на мощность отраженного сигнала, что обусловлено тем, что по методике наклонного (под большими углами) зондирования принципиально невозможно измерить крупные волны, например зыбь из-за физических особенностей процесса рассеяния микроволнового излучения водной поверхностью при наклонном зондировании.
Задачей, решаемой данным изобретением, является разработка дистанционного радиолокационного способа определения параметров волнения океанской поверхности, обеспечивающего расширение набора измеряемых из космоса параметров волнения, а именно: дисперсии наклонов водной поверхности, высоты значительного волнения и сечения обратного рассеяния, измеряемых независимо, а также более точное определение скорости приповерхностного ветра за счет исключения вышеуказанной систематической ошибки.
Технический результат в разработанном способе достигается тем, что разработанный радиолокационный способ определения параметров состояния приповерхностного слоя океана со спутника, также как и способ-прототип, включает в себя излучение доплеровским радиолокатором, снабженным однолучевой антенной с ножевой диаграммой направленности, зондирующих радиоимпульсов микроволнового диапазона, прием отраженных от водной поверхности импульсов, измерение формы отраженных импульсов и определение в первом приближении по алгоритму скорости приповерхностного ветра.
Новым в разработанном способе является то, что ножевую диаграмму направленности антенны ориентируют вдоль направления полета, зондирующие импульсы направляют к поверхности океана в надир и каждым импульсом освещают на измеряемой поверхности пятно с размерами порядка 10-15×200-300 км, а при приеме отраженных импульсов используют временную или доплеровскую селекцию по дальности и процедуру синтезирования сечения обратного рассеяния σ0y, при этом дисперсию наклонов σθ2 поверхности в направлении полета определяют из соотношения

где δ - ширина (в градусах) диаграммы направленности антенны на уровне
0,5 по мощности,
σ0,mах - сечение обратного рассеяния при вертикальном падении на поверхность плоской волны,
σ0y - сечение обратного рассеяния, полученное при упомянутом выше синтезировании,
а уточненное значение скорости V приповерхностного ветра определяют по однопараметрическому алгоритму с учетом вычисленной выше дисперсии наклонов σθ2: V=f(σθ2).
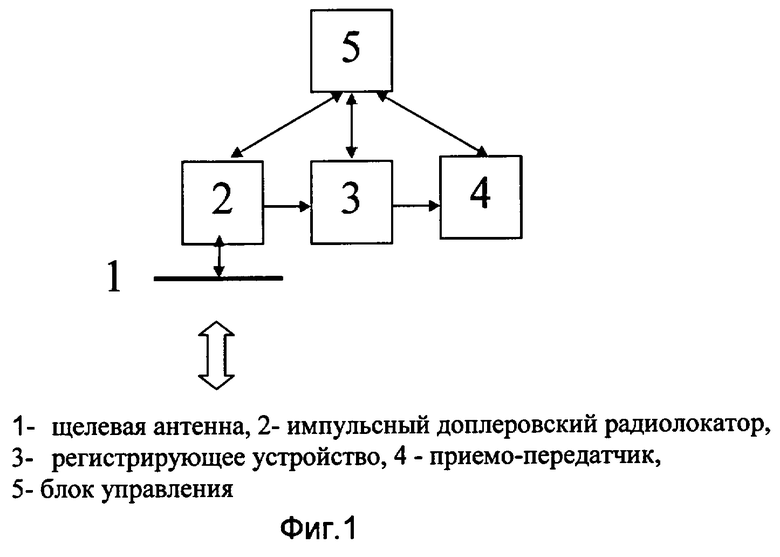
На фиг. 1 представлен вариант блок-схемы устройства для реализации разработанного способа.
На фиг. 2 представлена схема наблюдения поверхности океана в соответствие с разработанным способом.
На фиг. 3 представлена схема последовательного наблюдения выделенного рассеивающего участка (ячейки) океанической поверхности при движении спутника.
На фиг. 4 представлена иллюстрация процедуры синтезирования сечения обратного рассеяния, полученного в гипотетическом случае волнения, однородного в пределах всего освещенного пятна.
Один из вариантов устройства для реализации разработанного способа, представленный на фиг. 1, содержит щелевую антенну 1 с ножевой диаграммой направленности, соединенную с импульсным доплеровским радиолокатором 2 сантиметрового диапазона, который, в свою очередь, соединен с регистрирующим устройством 3, выход которого соединен со входом приемопередатчика 4, обеспечивающего связь со станцией слежения (на чертеже не показана) на Земле. При этом управление всеми элементами устройства для реализации разработанного способа осуществляется с помощью блока управления 5, который имеет соединение с радиолокатором 2, регистрирующим устройством 3 и приемопередатчиком 4.
В качестве антенны 1 с ножевой диаграммой направленности может быть использована, например, однолучевая, щелевая антенна МИУС отечественного производства или однолучевая, щелевая антенна PR 5 чешского производства (фирмы TESLA). Ножевая диаграмма направленности антенны обеспечивается за счет выбора размеров щели.
В качестве доплеровского радиолокатора 2 может быть использован, например, доплеровский измеритель скорости и сноса ДИИС (г. Каменск-Уральский) или доплеровский радиолокатор, изготавливаемый в ЦНИИ “Комета” г. Москва. В качестве регистрирующего устройства 3 и приемопередатчика 4 могут быть использованы любые стандартные устройства подобного назначения, эксплуатируемые на спутниках в настоящее время для записи информации и передачи ее на Землю.
Импульсный доплеровский радиолокатор 2 обеспечивает длительность зондирующих импульсов от 100 до 2000 нс с частотой повторения порядка 5 кГц. Соответствующей ориентацией щелевой антенны 1 ножевая диаграмма направленности антенны шириной 1×20-25 градусов устанавливается вдоль направления полета (траектории движения) спутника в надир к подстилающей поверхности Земли.
Разработанный радиолокационный способ определения параметров состояния приповерхностного слоя океана осуществляют следующим образом.
При пролете спутника над акваторией океана посредством антенны 1 и радиолокатора 2, управляемого блоком 5, излучают последовательность зондирующих импульсов по нормали к поверхности океана (см. фиг. 1). Этой же антенной 1 с радиолокатором 2 принимают последовательность отраженных от водной поверхности импульсов и определяют их форму, которую фиксируют (запоминают) с помощью регистрирующего устройства 3, в котором эта информация хранится до очередного сеанса связи со станцией слежения, снабженной компьютером. Связь со станцией слежения осуществляют с помощью приемопередатчика 4, управляемого блоком 5. Направление полета (см. фиг. 2) спутника 6 показано вектором  скорости полета (направление полета выбрано по оси у); θ1, θ2 и R1, R2 - углы падения и наклонные дальности до двух различных отражающих точек океанской поверхности соответственно. За счет ножевой диаграммы направленности антенны 1, ориентированной вдоль направления полета, на поверхности океана каждый зондирующий импульспри высоте полета, например, 800 км освещает пятно 7 с продольным (вдоль направления полета) размером порядка 200-300 км при поперечном размере порядка 10-15 км. В пределах такого пятна 7 с размерами 10-15×200-300 км характеристики волнения приповерхностного слоя океана, как правило, не остаются постоянными, поскольку океанологи утверждают, что волнение можно считать однородным на участке с размерами 25×25 км, в крайнем случае 50×50 км, поэтому, если бы измерения параметров волнения в пределах такого протяженного пятна 7 проводились традиционным радиолокационным методом, то, например, величина дисперсии наклонов имела бы такое усредненное значение, которое невозможно было бы соотнести с каким-либо конкретным участком требуемых размеров 25×25 км океанской поверхности. В разработанном способе определение параметров волнения в пятне 7 с размерами 10-15×200-300 км осуществляют следующим образом. Указанное протяженное пятно 7 с помощью временной или доплеровской селекции по дальности разбивают на N участков с размерами, например, 15×15 км, на каждом из которых волнение можно считать однородным, и наблюдают за каждым выделенным участком. Рассмотрим процедуру определения параметров волнения на примере i-го выделенного участка с размерами 15×15 км. Сечение обратного рассеяния σi этого участка периодически определяют в течение всего времени нахождения i-го участка в зоне видимости спутника, т.е. в пределах освещенного пятна 7, при этом антенна 1 радиолокатора 2 в разные моменты времени видит i-й участок поверхности под разными углами падения (см. фиг. 3). Время наблюдения за выделенным участком поверхности зависит от высоты полета и при высоте, например, 800 км составляет ~40 с. Если объединить все данные о сечении обратного рассеяния i-го участка, полученные за время пролета (~40 с) в разные моменты времени (или под разными углами падения), то определим сечение обратного рассеяния σ0y, полученное при измерении радиолокатором 2 с ножевой антенной 1 в гипотетическом случае волнения, однородного в пределах всего освещенного пятна 7 (см. фиг. 4)
скорости полета (направление полета выбрано по оси у); θ1, θ2 и R1, R2 - углы падения и наклонные дальности до двух различных отражающих точек океанской поверхности соответственно. За счет ножевой диаграммы направленности антенны 1, ориентированной вдоль направления полета, на поверхности океана каждый зондирующий импульспри высоте полета, например, 800 км освещает пятно 7 с продольным (вдоль направления полета) размером порядка 200-300 км при поперечном размере порядка 10-15 км. В пределах такого пятна 7 с размерами 10-15×200-300 км характеристики волнения приповерхностного слоя океана, как правило, не остаются постоянными, поскольку океанологи утверждают, что волнение можно считать однородным на участке с размерами 25×25 км, в крайнем случае 50×50 км, поэтому, если бы измерения параметров волнения в пределах такого протяженного пятна 7 проводились традиционным радиолокационным методом, то, например, величина дисперсии наклонов имела бы такое усредненное значение, которое невозможно было бы соотнести с каким-либо конкретным участком требуемых размеров 25×25 км океанской поверхности. В разработанном способе определение параметров волнения в пятне 7 с размерами 10-15×200-300 км осуществляют следующим образом. Указанное протяженное пятно 7 с помощью временной или доплеровской селекции по дальности разбивают на N участков с размерами, например, 15×15 км, на каждом из которых волнение можно считать однородным, и наблюдают за каждым выделенным участком. Рассмотрим процедуру определения параметров волнения на примере i-го выделенного участка с размерами 15×15 км. Сечение обратного рассеяния σi этого участка периодически определяют в течение всего времени нахождения i-го участка в зоне видимости спутника, т.е. в пределах освещенного пятна 7, при этом антенна 1 радиолокатора 2 в разные моменты времени видит i-й участок поверхности под разными углами падения (см. фиг. 3). Время наблюдения за выделенным участком поверхности зависит от высоты полета и при высоте, например, 800 км составляет ~40 с. Если объединить все данные о сечении обратного рассеяния i-го участка, полученные за время пролета (~40 с) в разные моменты времени (или под разными углами падения), то определим сечение обратного рассеяния σ0y, полученное при измерении радиолокатором 2 с ножевой антенной 1 в гипотетическом случае волнения, однородного в пределах всего освещенного пятна 7 (см. фиг. 4)
 .
.
В результате выполнения такой процедуры синтезирования суммирующее изображение будет аналогично "одномоментному" наблюдению поверхности океана в освещенном пятне 7, но с однородным волнением в пределах всего этого пятна. При этом, как установлено авторами, дисперсия наклонов поверхности σθ2 в направлении полета определяется по следующей формуле:
где δ - ширина (в градусах) диаграммы направленности антенны 1 на уровне 0,5 по мощности; σ0,max - сечение обратного рассеяния при вертикальном падении на поверхность плоской волны. Величину σ0,mах получают при измерении сечения обратного рассеяния от участка, выделенного с помощью селекции по дальности непосредственно под антенной 1.
Описанная выше процедура синтезирования сечения обратного рассеяния из последовательно наблюдаемого каждого i-го участка (ячейки) позволяет значительно улучшить пространственное разрешение и измерять наклоны водной поверхности из космоса с элементом разрешения 15×15 км.
Различие между участками (ячейками) на фиг. 4 временное. За счет этого можно выбирать для последующей обработки некоррелированные между собой участки поверхности. Время корреляции океанской поверхности, а тем самым и отраженного сигнала, меньше 0,1 с. Если время наблюдения составляет примерно 40 с, то за время наблюдения будет измерено не менее 400 некоррелированных ячеек, и поэтому уровень шума будет низким.
Еще один важный параметр волнения - высоту значительного волнения определяют в данном способе с помощью стандартного известного алгоритма по переднему склону отраженного импульса (см., например, Alfred R. Zieger at all, NASA Radar Altimeter for TOPEX/POSEIDON Project, Proceedings of the IEEE, Vol. 79, №6, June 1991).
Скорость приповерхностного ветра в первом приближении с учетом только сечения обратного рассеяния V=f(σ0y) может быть восстановлена с помощью известного алгоритма, примененного в способе-прототипе. Однако, используя измеренную в разработанном способе величину дисперсии наклонов σθ2, получают уточненное значение скорости V приповерхностного ветра V=f(σ0y, σθ2), что позволяет избавиться от систематической ошибки измерений, присутствующей в способе-прототипе и аналоге, обусловленной крупными волнами, например волнами зыби, не связанными с ветром на измеряемом участке.
Таким образом, разработанный способ определения параметров состояния приповерхностного слоя океана со спутника, осуществляемый с помощью радиолокатора с ножевой диаграммой направленности антенны при надирном зондировании, позволяет расширить набор измеряемых из космоса параметров волнения с хорошим пространственным разрешением при большом размере освещаемого пятна и тем самым позволяет максимально использовать возможности измерения из космоса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАНОРАМНЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2010 |
|
RU2449312C1 |
| ПАНОРАМНЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2003 |
|
RU2274877C2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВЗВОЛНОВАННОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2466425C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2562924C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КРУПНОМАСШТАБНОГО ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2501037C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ ОКЕАНСКИХ ЯВЛЕНИЙ ИЗ КОСМОСА | 2009 |
|
RU2447457C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕФТЯНЫХ ПЛЕНОК НА ВОДНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2529886C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее радиолокационным изображениям | 2023 |
|
RU2817178C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |



Изобретение относится к радиолокации, а именно к радиолокационным методам определения параметров морского волнения, и может быть использовано в метеорологии и океанологии для дистанционного зондирования приповерхностного слоя океанов. Изобретение позволяет расширить набор измеряемых из космоса параметров волнения, что и является достигаемым техническим результатом. Для этого ножевую диаграмму направленности антенны ориентируют вдоль направления полета спутника, зондирующие импульсы направляют к поверхности океана в надир и каждым импульсом освещают на измеряемой поверхности пятно с размерами порядка 10-15×200-300 км, а при приеме отраженных импульсов используют временную или доплеровскую селекцию по дальности и процедуру синтезирования сечения обратного рассеяния σ0у, при этом дисперсию наклонов σθ2 поверхности океана в направлении полета определяют из соотношения:  где δ - ширина (в градусах) диаграммы направленности антенны на уровне 0,5 по мощности, σ0,max - сечение обратного рассеяния при вертикальном падении на поверхность плоской волны, σ0у - сечение обратного рассеяния, полученное при упомянутом выше синтезировании, а уточненное значение скорости V приповерхностного ветра определяют по однопараметрическому алгоритму с учетом вычисленной выше дисперсии σθ2 наклонов. 4 ил.
где δ - ширина (в градусах) диаграммы направленности антенны на уровне 0,5 по мощности, σ0,max - сечение обратного рассеяния при вертикальном падении на поверхность плоской волны, σ0у - сечение обратного рассеяния, полученное при упомянутом выше синтезировании, а уточненное значение скорости V приповерхностного ветра определяют по однопараметрическому алгоритму с учетом вычисленной выше дисперсии σθ2 наклонов. 4 ил.
Радиолокационный способ определения параметров состояния приповерхностного слоя океана со спутника, включающий в себя излучение доплеровским радиолокатором, снабженным однолучевой антенной с ножевой диаграммой направленности, зондирующих импульсов микроволнового диапазона, прием отраженных от водной поверхности импульсов, измерение формы отраженных импульсов и определение скорости приповерхностного ветра, отличающийся тем, что ножевую диаграмму направленности антенны ориентируют вдоль направления полета, зондирующие импульсы направляют к поверхности океана в надир и каждым импульсом освещают на измеряемой поверхности протяженное пятно с размерами порядка 10-15×200-300 км, а при приеме отраженных импульсов используют временную или доплеровскую селекцию по дальности, при этом разбивают указанное протяженное пятно на N участков, определяют сечение обратного рассеяния σi каждого i-го участка в течение всего времени нахождения в зоне видимости спутника и под разными углами, объединяют все данные о сечении обратного рассеяния σi-го участка, полученные за время пролета спутника, синтезируя в результате сечение обратного рассеяния  в пределах всего освещенного пятна, аналогичное одномоментному наблюдению поверхности океана в гипотетическом случае волнения, однородного в пределах всего освещенного пятна, при этом дисперсию наклонов σθ2 водной поверхности в направлении полета определяют из соотношения
в пределах всего освещенного пятна, аналогичное одномоментному наблюдению поверхности океана в гипотетическом случае волнения, однородного в пределах всего освещенного пятна, при этом дисперсию наклонов σθ2 водной поверхности в направлении полета определяют из соотношения
где δ - ширина диаграммы направленности антенны на уровне 0,5 по мощности;
σ0,max - сечение обратного рассеяния, полученное при вертикальном падении зондирующих импульсов на водную поверхность;
σ0у - сечение обратного рассеяния, полученное при упомянутом выше синтезировании,
а значение скорости приповерхностного ветра V определяют по сечению обратного рассеяния σ0у и с учетом вычисленной дисперсии σθ2 наклонов, с использованием метода регрессивного анализа и зависимости V=f(σ0у, σθ2), при этом высоту значительного волнения определяют по переднему склону отраженного импульса.
| IE EE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING | |||
| Vol | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ СИСТЕМЫ ОКЕАН - АТМОСФЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047874C1 |
| US 6201494 А, 13.03.2001 | |||
| US 6081221 А, 27.06.2000 | |||
| DE 3744391, 17.04.1990. | |||

