Настоящая заявка притязает на приоритет Предварительной заявки (США) серийный номер 60/828051, озаглавленной "A METHOD AND APPARATUS FOR P-SCH FOR E-UTRA", поданной 3 октября 2006 года, назначенной правопреемнику этой заявки и содержащейся в данном документе по ссылке.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем, относится к связи, а более конкретно, к методикам для поддержки поиска соты в системе беспроводной связи.
УРОВЕНЬ ТЕХНИКИ
Системы беспроводной связи широко развернуты, чтобы предоставлять различные услуги связи, например, передачу речи, видео, пакетных данных, обмен сообщениями, широковещательную передачу и т.д. Эти системы могут быть системами множественного доступа, допускающими поддержку связи для нескольких пользователей посредством совместного использования доступных системных ресурсов. Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA) и системы с ортогональным FDMA (OFDMA).
Система беспроводной связи может включать в себя множество базовых станций (или узлов B), которые поддерживают связь для множества пользовательских устройств (UE). UE (к примеру, сотовый телефон) может быть в пределах покрытия нуля, одной или нескольких базовых станций в любой данный момент. UE, возможно, только что включен или, возможно, потерял покрытие и таким образом может не знать, какие базовые станции могут быть приняты. UE может выполнить поиск соты, чтобы обнаружить базовые станции и получить синхронизацию и другую информацию для обнаруженных базовых станций.
Каждая базовая станция может отправлять передачи синхронизации, чтобы помочь UE выполнять поиск соты. В общем, передача синхронизации может быть любой передачей, которая позволяет приемному устройству обнаруживать передающее устройство и получать такую информацию, как тактирование и т.д. Передачи синхронизации представляют служебную информацию и должны быть отправлены с максимально возможной эффективностью. Кроме того, передачи синхронизации должны давать возможность UE выполнять поиск соты максимально быстро и устойчиво к ошибкам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Методики для поддержки поиска соты посредством эффективной передачи информации через передачи синхронизации описываются в данном документе. В аспекте, несколько (к примеру, две) передач синхронизации отправляются в кадре с неравномерным разнесением между передачами синхронизации. Информация передается через неравные расстояния или интервалы времени между последовательными передачами синхронизации. Передачи синхронизации могут соответствовать основным кодам синхронизации (PSC), отправленным по основному каналу синхронизации (P-SCH), или некоторым другим передачам, отправленным по некоторому другому каналу.
В другом аспекте несколько уровней неравномерного разнесения передач синхронизации могут использоваться для того, чтобы передавать различные типы информации. В одной схеме несколько передач синхронизации отправляются в различных субкадрах кадра, и каждая передача синхронизации отправляется в одном из нескольких периодов символа в соответствующем субкадре. Два уровня неравномерного разнесения могут быть достигнуты при этой структуре передачи. Неравномерное разнесение на уровне субкадра может быть достигнуто посредством отправки передач синхронизации в неравномерно разнесенных субкадрах и может использоваться для того, чтобы передавать границу кадра. Неравномерное разнесение на уровне символа может быть достигнуто посредством отправки одной передачи синхронизации в одном из нескольких возможных периодов символа в зависимости от информации, передаваемой через неравномерное разнесение на уровне символа. Например, несколько групп идентификаторов (ID) сот могут быть ассоциативно связаны с различными периодами символа, и каждой соте может быть назначен идентификатор соты из одной из групп. Сота может отправлять передачу синхронизации в периоде символа для группы идентификаторов соты, которой принадлежит сота. Расстояния между последовательными передачами синхронизации также могут использоваться для того, чтобы передавать длину циклического префикса, используемую сотой.
Передача дополнительной синхронизации может быть отправлена в местоположении, которое является предварительно определенным смещением от (к примеру, рядом с) одной из несколько передач синхронизации. Передача дополнительной синхронизации может соответствовать дополнительному коду синхронизации (SSC), отправленному по дополнительному каналу синхронизации (S-SCH), или некоторой другой передаче, отправленной по некоторому другому каналу. Оценка канала может быть извлечена на основе смежной или соседней передачи синхронизации и использована для когерентного обнаружения передачи дополнительной синхронизации, что может повысить производительность.
Далее более подробно описаны различные аспекты и признаки изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
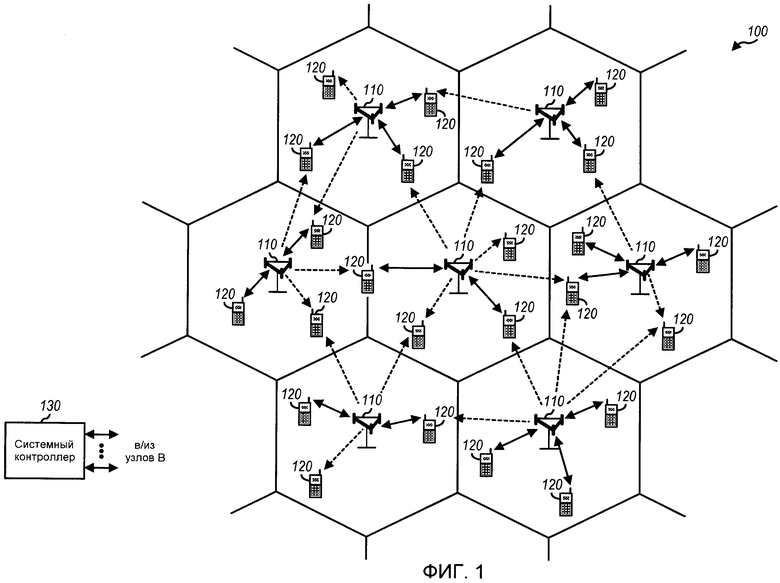
Фиг.1 иллюстрирует систему беспроводной связи.
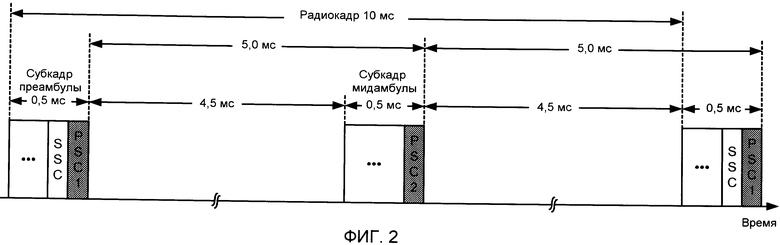
Фиг.2 показывает два равномерно разнесенных PSC и один SSC.
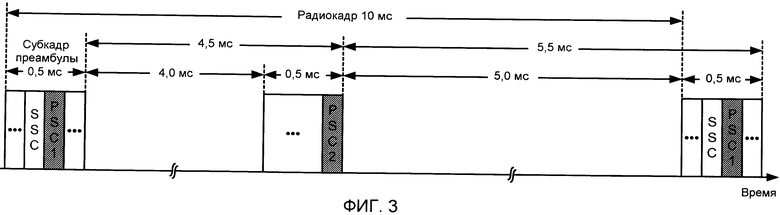
Фиг.3 показывает два неравномерно разнесенных PSC и один SSC.
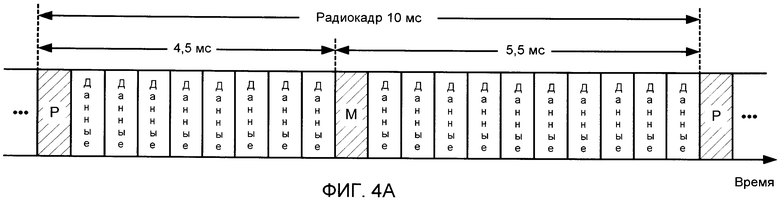
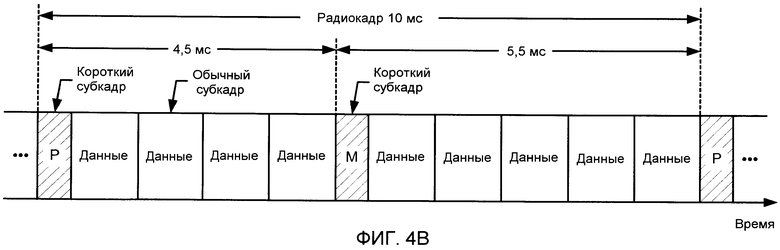
Фиг.4A и 4B показывают два неравномерно разнесенных PSC и один SSC в радиокадрах с равными и неравными субкадрами соответственно.
Фиг.5 показывает два PSC и один SSC с неравномерным разнесением на уровне субкадра и неравномерным разнесением на уровне символа.
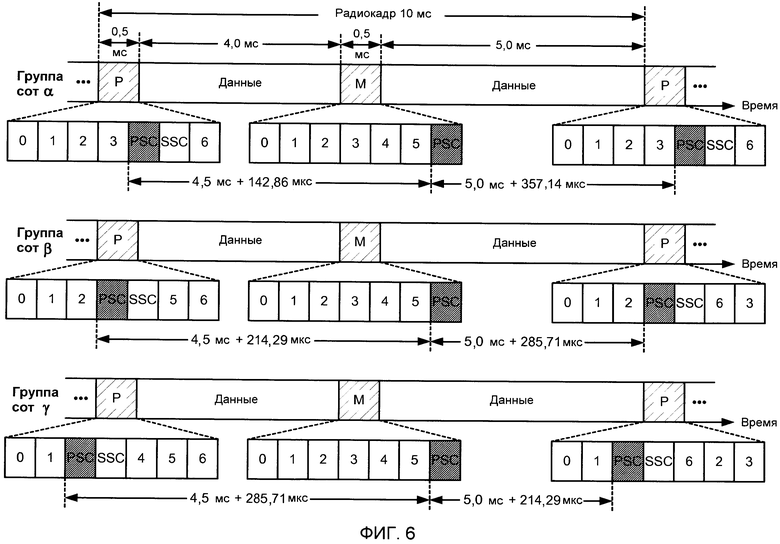
Фиг.6 и 7 показывают два неравномерно разнесенных PSC и один SSC для трех групп сот с небольшой и большой длиной циклического префикса соответственно.
Фиг.8 показывает процесс, выполняемый посредством узла B, чтобы поддержать поиск соты.
Фиг.9 показывает устройство для поддержки поиска соты.
Фиг.10 показывает процесс, выполняемый посредством UE для поиска соты.
Фиг.11 показывает устройство для выполнения поиска соты.
Фиг.12 показывает другой процесс, выполняемый посредством UE для поиска соты.
Фиг.13 показывает другое устройство для выполнения поиска соты.
Фиг.14 показывает блок-схему узла B и UE.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг.1 иллюстрирует систему 100 беспроводной связи с несколькими узлами B 110. Узел B - это, в общем, стационарная станция, которая обменивается данными с UE, и он также может упоминаться как базовая станция, усовершенствованный узел B (eNode B), точка доступа и т.д. Каждый узел B 110 предоставляет покрытие связи для конкретной географической области. Термин "сота" может относиться к узлу B и/или его зоне покрытия в зависимости от контекста, в котором используется термин. Чтобы повысить пропускную способность системы, зона покрытия узла B может быть секционирована на несколько меньших областей (к примеру, три меньших области), и каждая меньшая область может обслуживаться посредством соответствующей базовой приемопередающей станции (BTS). Термин "сектор" может относиться к BTS и/или ее зоне покрытия в зависимости от контекста, в котором используется термин. Для секторизованной соты, BTS для всех секторов этой соты типично совместно расположены в пределах узла B соты. Методики, описанные в данном документе, могут быть использованы для систем с секторизованными сотами, а также систем с несекторизованными сотами. Для простоты в последующем описании и формуле изобретения термин "сота" может, в общем, упоминаться как узел B и/или его зона покрытия в системе с несекторизованными сотами и как BTS и/или ее зона покрытия в системе с секторизованными сотами.
UE 120 могут быть распределены по системе. UE может быть стационарным или мобильным и также может упоминаться как мобильная станция, мобильное устройство, терминал, терминал доступа, станция и т.д. Пользовательским оборудованием UE может быть сотовый телефон, персональное цифровое устройство (PDA), беспроводной модем, устройство беспроводной связи, карманное устройство, портативный компьютер, абонентское устройство, беспроводный телефон и т.д. UE может обмениваться данными с одним или более узлов B через передачи по нисходящей линии связи и восходящей линии связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от узлов B к UE, а восходящая линия связи (или обратная линия связи) относится к линии связи от UE к узлам B. На фиг.1 сплошная линия с двойными стрелками указывает связь между узлом B и UE. Прерывистая линия с одной стрелкой указывает прием посредством UE сигнала нисходящей линии связи от узла B. UE может выполнять поиск соты на основе сигналов нисходящей линии связи от узлов B в системе.
Системный контроллер 130 может подключаться к узлам B 110 и предоставлять координацию и управление для этих узлов B. Системный контроллер 130 может быть одним сетевым объектом или набором сетевых объектов. Системный контроллер 130 может содержать контроллер радиосети (RNC), центр коммутации мобильной связи (MSC) и т.д.
Методики, описанные в данном документе, могут использоваться для различных систем беспроводной связи, таких как системы CDMA, FDMA, TDMA, OFDMA и SC-FDMA. Термины "системы" и "сети" зачастую используются взаимозаменяемо. Система CDMA может реализовывать такую технологию радиосвязи, как cdma2000, универсальный наземный радиодоступ (UTRA), развитый UTRA (E-UTRA) и т.д. Cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. UTRA включает в себя широкополосную CDMA (W-CDMA) и стандарт низкой скорости при передаче символов шумоподобной последовательности (LCR). TDMA-система может реализовывать такую технологию радиосвязи, как глобальная система мобильной связи (GSM). OFDMA-система использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) и отправляет символы модуляции в частотной области по ортогональным поднесущим, которые также могут упоминаться как тоны, элементы разрешения и т.д. OFDMA-система может реализовывать такую технологию радиосвязи, как долгосрочное развитие (LTE), Flash-OFDM® и т.д. SC-FDMA-система использует мультиплексирование с частотным разделением каналов с одной несущей (SC-FDM) и отправляет символы модуляции во временной области по ортогональным поднесущим. UTRA, E-UTRA, GSM и LTE описываются в документах организации, называемой Партнерским проектом третьего поколения (3GPP). Cdma2000 описывается в документах организации, называемой Партнерским проектом третьего поколения 2 (3GPP2). Эти различные технологии и стандарты радиосвязи известны в данной области техники. Для ясности определенные аспекты методик описываются ниже для E-UTRA и LTE, и терминология 3GPP используется в большой части описания ниже.
В системе 100 узлы B 110 могут периодически отправлять передачи синхронизации, чтобы позволить UE 120 обнаруживать узлы B и получать такую информацию, как тактирование, идентификатор соты и т.д. Передачи синхронизации могут быть отправлены по-разному. В одной схеме, которая описывается подробно ниже, каждый узел B периодически передает P-SCH и S-SCH. P-SCH может переносить один или более PSC в каждом радиокадре предварительно определенной длительности. S-SCH может переносить один или более SSC в каждом радиокадре.
UE может выполнять поиск узлов B или сот помощью двухстадийного процесса обнаружения. На первой стадии или стадии обнаружения PSC UE может обнаруживать соты на основе PSC, отправленных по P-SCH, и получать синхронизацию для каждой обнаруженной соты. UE также может извлекать оценку канала для каждой обнаруженной соты на основе PSC, принимаемого из этой соты. На второй стадии или стадии обнаружения SSC UE может идентифицировать каждую обнаруженную соту на основе SSC, отправленного по S-SCH. Чтобы повысить производительность обнаружения SSC, UE может выполнять когерентное обнаружение SSC для каждой обнаруженной соты с оценкой канала, полученной из PSC для этой соты.
В общем, один или несколько PSC могут быть отправлены в каждом радиокадре. Несколько PSC могут улучшить время поиска и уменьшить сложность поиска посредством (a) сокращения количества гипотез синхронизации/выборки, чтобы тестировать между последовательными PSC, и (b) повышения энергии сигнала через комбинирование PSC, принимаемых в пределах данного периода времени. Тем не менее, отправка слишком большого количества PSC в радиокадре может привести в результате к большому объему служебной информации и большой потери полосы пропускания, а также может наложить дополнительную нагрузку на стадию обнаружения SSC за счет увеличения числа гипотез для границы кадра. В одной схеме, которая описывается в большей части последующего описания, два PSC отправляются в радиокадре и могут предоставлять хороший компромисс между различными соображениями, отмеченными выше. Тем не менее, методики, описанные в данном документе, могут использоваться для других схем с больше чем двумя PSC на радиокадр.
Фиг.2 показывает примерную передачу двух PSC и одного SSC в радиокадре с равномерным разнесением между PSC. Радиокадр может иметь длительность 10 миллисекунд (мс) и может быть фрагментирован на 20 субкадров, при этом каждый субкадр имеет длительность 0,5 мс, как показано на фиг.2. Первый PSC (PSC1) и SSC отправляются в субкадре преамбулы, который является первым субкадром радиокадра. Второй PSC (PSC2) отправляется в субкадре мидамбулы, который является 11-ым субкадром радиокадра. Субкадры преамбулы и мидамбулы каждый могут включать в себя несколько периодов символа. PSC1 может быть отправлен в последнем периоде символа субкадра преамбулы, а PSC2 может быть отправлен в последнем периоде символа субкадра мидамбулы. Расстояние от конца PSC1 до конца PSC2 может составить 5 мс, а расстояние от конца PSC2 до конца PSC1 в следующем радиокадре может составить 5 мс, как показано на фиг.2. Разнесение между PSC в таком случае должно быть равномерным с постоянным расстоянием 5 мс между двумя последовательными PSC.
Фиг.2 показывает использование двух различных PSC для P-SCH. Каждый PSC может быть обнаружен посредством выполнения согласованной фильтрации для входных выборок с помощью этого PSC. Два согласованных фильтра могут использоваться для двух различных PSC и могут работать одновременно для одних и тех же входных выборок, чтобы быстро определить то, принят ли PSC1 или PSC2. Чтобы уменьшить вычислительную сложность, один PSC может использоваться и для PSC1, и для PSC2, и формы сигнала для PSC1 и PSC2 в таком случае должны быть идентичными. Один согласованный фильтр затем может использоваться для того, чтобы обнаружить PSC1, отправленный в субкадре преамбулы, а также PSC2, отправленный в субкадре мидамбулы.
С равномерным разнесением кодов PSC и использованием одного PSC для субкадров преамбулы и мидамбулы граница символа P-SCH может быть обнаружена посредством согласованной фильтрации входных выборок для каждого периода выборок или гипотезы синхронизации. Согласованная фильтрация должна предоставлять пик каждый раз, когда PSC обнаруживается во входных выборках. Пики PSC из согласованной фильтрации должны быть равномерно разнесены приблизительно на 5 мс. Два пика PSC могут быть обнаружены в данном радиокадре, и может быть неоднозначность в отношении того, какой из двух пиков PSC соответствует границе радиокадра. Следовательно, может быть две гипотезы границы кадра, соответствующие двум пикам PSC. Если SSC отправляется только в субкадре преамбулы, как показано на фиг.2, то обнаружение SSC может быть выполнено для каждой из двух гипотез границы кадра. Граница кадра затем может быть определена, когда SSC обнаруживается. Тем не менее, обработка для обнаружения SSC может быть удвоена, поскольку она может быть выполнена для двух гипотез границы кадра. Кроме того, обнаружение SSC для каждой гипотезы границы кадра может быть сложным, если есть много возможных значений (к примеру, много возможных идентификаторов соты) для SSC.
В аспекте PSC отправляются с неравномерным разнесением, и информация передается через неравные расстояния или интервалы времени между последовательными PSC. Неравномерное разнесение также может упоминаться как неравномерное местоположение, неравномерное позиционирование и т.д. Неравномерное разнесение может быть достигнуто посредством отправки PSC в субкадрах, которые не разнесены равномерно в радиокадре.
Фиг.3 показывает примерную передачу двух PSC и одного SSC в радиокадре с неравномерным разнесением между PSC. В этом примере PSC1 и SSC отправляются в субкадре преамбулы, а PSC2 отправляется в субкадре мидамбулы. Тем не менее, расстояние от конца субкадра преамбулы до конца субкадра мидамбулы (TC1) отличается от расстояния от конца субкадра мидамбулы до конца субкадра преамбулы в следующем радиокадре (TC2). Радиокадр может иметь длительность 10 мс и может включать в себя 20 субкадров, при этом каждый субкадр имеет длительность 0,5 мс. PSC1 может быть отправлен в первом субкадре, PSC2 может быть отправлен в 10-ом субкадре (вместо 11-ого субкадра), TC1 может быть равным 4,5 мс, а TC2 может быть равным 5,5 мс, как показано на фиг.3. TC1 и TC2 также могут быть другими значениями, так что TC1 не равно TC2.
С неравномерным разнесением PSC согласованная фильтрация может быть выполнена для входных выборок, чтобы получить пики PSC, как описано выше. Расстояния TC1 и TC2 между пиками PSC могут использоваться для того, чтобы определить границу кадра, даже когда один PSC используется для субкадров преамбулы и мидамбулы. Обнаружение SSC также может быть упрощено при знании границы кадра.
Неравномерное разнесение между PSC может быть достигнуто с помощью различных структур кадра. В общем, радиокадр может иметь любую длительность и может включать в себя любое число субкадров, и субкадры может иметь одинаковую или различную длительность.
Фиг.4A показывает передачу двух неравномерно разнесенных PSC и одного SSC в радиокадре с субкадрами равной длительности. В этом примере радиокадр включает в себя 20 субкадров, при этом каждый субкадр имеет длительность 0,5 мс. PSC1 может быть отправлен в субкадре преамбулы (обозначенном как "P" на фиг.4A), который может быть первым субкадром радиокадра. PSC2 может быть отправлен в субкадре мидамбулы (обозначенном как "М" на фиг.4A), который может быть 10-ым субкадром (как показано в 4A), 12-ым субкадром или любым субкадром кроме 11-ого субкадра.
Фиг.4B показывает передачу двух неравномерно разнесенных PSC и одного SSC в радиокадре с субкадрами различной длительности. В этом примере радиокадр включает в себя 11 субкадров, причем субкадры преамбулы и мидамбулы каждый имеют длительность 0,5 мс, а оставшиеся субкадры каждый имеют длительность 1,0 мс. PSC1 может быть отправлен в субкадре преамбулы, который может быть первым субкадром радиокадра. PSC2 может быть отправлен в субкадре мидамбулы, который может быть 6-ым субкадром (как показано в 4A), 7-ым субкадром и т.д.
Как показано на фиг.4A и 4B, данные и/или другая информация могут быть отправлены в субкадрах между преамбулой и мидамбулой и в субкадрах между мидамбулой и преамбулой. Неравномерное разнесение между PSC может быть достигнуто без нарушения или образования разрывности в субкадрах данных.
В другом аспекте несколько уровней неравномерного разнесения PSC используются для того, чтобы передавать различные типы информации. Несколько PSC могут быть отправлены в нескольких субкадрах радиокадра, и каждый PSC может быть отправлен в одном из нескольких периодов символа в соответствующем субкадре, к примеру, как показано на фиг.2 и 3. Два уровня неравномерного разнесения могут быть достигнуты при этой структуре передачи PSC. Неравномерное разнесение на уровне субкадра может быть достигнуто посредством отправки PSC в неравномерно разнесенных субкадрах, к примеру, как показано на фиг.3. Неравномерное разнесение на уровне символа может быть достигнуто посредством отправки PSC в периоды символа, выбранные на основе информации, передаваемой через неравномерное разнесение на уровне символа. В общем, система может использовать только неравномерное разнесение на уровне субкадра или только неравномерное разнесение на уровне символа, или неравномерное разнесение и на уровне субкадра, и на уровне символа.
Фиг.5 показывает схему для передачи двух PSC и одного SSC в радиокадре с неравномерным разнесением на уровне субкадра и неравномерным разнесением на уровне символа. Один PSC может использоваться и для PSC1, и для PSC2, чтобы упростить обнаружение кодов PSC.
Для неравномерного разнесения на уровне субкадра PSC1 и SSC отправляются в субкадре 0, а PSC2 отправляется в субкадре М радиокадра с N субкадрами, где М и N могут быть надлежащим образом выбранными целочисленными значениями. Расстояние от начала субкадра 0 с PSC1 до начала субкадра М с PSC2 составляет TC1=М, а расстояние от начала субкадра М с PSC2 до начала следующего субкадра 0 с PSC1 составляет TC2=N-М, где TC1≠TC2. PSC1 и PSC2 также могут быть отправлены в других неравномерно разнесенных субкадрах так, чтобы TC1≠TC2. Может быть преимущественным иметь небольшую разность между TC1 и TC2. Если разность является большой, то преимущества (в отношении времени поиска и сложности) использования двух PSC в одном радиокадре могут уменьшиться.
Для неравномерного разнесения на уровне символа PSC1 отправляется в периоде символа, который составляет TF1 от начала субкадра 0, а PSC2 отправляется в периоде символа, который составляет TF2 от начала субкадра М, где, в общем, TF1≥0 и TF2≥0. Если PSC1 используется в качестве оценки канала для когерентного обнаружения SSC в субкадре 0, то SSC может быть размещен максимально близко к PSC1 или до, или после PSC1, так чтобы оценка канала, полученная из PSC1, совпадала с фактической характеристикой канала, наблюдаемой посредством SSC, максимально близко.
Суммарное расстояние от начала PSC1 до начала PSC2 равно TD1=TC1+ΔTF, где ΔTF=TF2-TF1. Суммарное расстояние от начала PSC2 до начала следующего PSC1 равно TD2=TC2-ΔTF. Суммарное расстояние TD1 состоит из приблизительного расстояния TC1 и точного расстояния ΔTF, а суммарное расстояние TD2 состоит из приблизительного расстояния TC2 и точного расстояния ΔTF. Приблизительные расстояния TC1 и TC2 могут использоваться для того, чтобы передавать определенную информацию, к примеру, границу радиокадра. Точное расстояние ΔTF может использоваться для того, чтобы передавать другую информацию. Объем информации, который может быть передан через точное расстояние ΔTF, зависит от числа периодов символа, доступных для того, чтобы отправить PSC1 и PSC2.
В одной схеме точное расстояние ΔTF используется для того, чтобы передавать информацию о группе сот. Идентификаторы доступных сот в системе могут быть разделены на несколько (G) групп, при этом каждая группа содержит различный поднабор всех идентификаторов доступных сот. Каждой соте может быть назначен конкретный идентификатор соты из одной из G групп. Использование несколько групп сот позволяет упростить обнаружение SSC. UE может обнаруживать для PSC и определять точное расстояние ΔTF между пиками PSC. UE затем может выполнить обнаружение SSC только для одной группы идентификаторов соты, указанных посредством точного расстояния ΔTF, вместо всех идентификаторов доступных сот. Количество гипотез идентификаторов соты для стадии обнаружения SSC тем самым может быть сокращено за счет наличия нескольких групп идентификаторов соты. Например, если три группы сформировано, то обработка для обнаружения SSC может быть уменьшена на одну треть.
В одной схеме G группам идентификаторов сот назначаются различные периоды символа для PSC1. Идентификаторы сот в различных группах могут быть назначены соседним сотам, которые могут создавать сильные помехи друг для друга. Посредством использования различных периодов символа для PSC1 среди соседних сот UE может иметь возможность получить оценки канала для конкретных сот даже в синхронизированной сети. UE может использовать конкретные для соты оценки канала для когерентного обнаружения SSC, что позволяет повысить производительность и уменьшить сложность.
В одной схеме PSC2 отправляется в один период символа посредством соседних сот. Система может управляться как одночастотная сеть (SFN) или может отправить определенные передачи с помощью SFN-операции. SFN относится к синхронизированной передаче информации от нескольких сот, которая может улучшить прием информации посредством UE. Если соседние соты отправляют PSC2 в один период символа, то UE могут иметь возможность собрать больше энергии для PSC2, что позволяет повысить эффективность обнаружения PSC. Соты могут отправлять конкретную информацию соты и конкретный для соты SSC в субкадре преамбулы даже в операции SFN.
Фиг.6 показывает схему для передачи двух неравномерно разнесенных PSC и одного SSC в радиокадре со смещенным PSC1. Один PSC может использоваться для обоих PSC, чтобы упростить обнаружение этих PSC. В этой схеме радиокадр имеет длительность 10 мс. Субкадры преамбулы и мидамбулы имеют длительность 0,5 мс и включают в себя семь периодов символа, которым назначены индексы от 0 до 6. Каждый период символа имеет длительность 7143 микросекунд (мкс). Идентификаторы доступных сот делятся на три группы, которые упоминаются как группы сот α, β и γ.
Для неравномерного разнесения на уровне субкадра PSC1 и SSC отправляются в субкадре преамбулы, а PSC2 отправляется в субкадре мидамбулы. Расстояние от субкадра преамбулы до субкадра мидамбулы составляет TC1=4,5 мс, а расстояние от субкадра мидамбулы до следующего субкадра преамбулы составляет TC2=5,5 мс. Для неравномерного разнесения на уровне символа PSC1 для группы сот α отправляется в период символа 4 субкадра преамбулы, PSC1 для группы сот β отправляется в период символа 3, а PSC1 для группы сот γ отправляется в период символа 2. PSC2 для всех трех групп сот отправляются в период символа 6 субкадра мидамбулы. SSC для каждой группы сот отправляется сразу после PSC1 для этой группы сот.
Для группы сот α суммарное расстояние от начала PSC1 до начала PSC2 составляет TD1,α = 4,5 мс + 142,86 мкс, суммарное расстояние от начала PSC2 до начала следующего PSC1 составляет TD2,α = 5,0 мс + 357,14 мкс, а точное расстояние составляет ΔTF,α = 142,86 мкс. Для группы сот β суммарное расстояние от начала PSC1 до начала PSC2 составляет TD1,β = 4,5 мс + 214,29 мкс, суммарное расстояние от начала PSC2 до начала следующего PSC1 составляет TD2,β = 5,0 мс + 285,71 мкс, а точное расстояние составляет ΔTF,β = 214,29 мкс. Для группы сот γ суммарное расстояние от начала PSC1 до начала PSC2 составляет TD1,γ = 4,5 мс + 285,71 мкс, суммарное расстояние от начала PSC2 до начала следующего PSC1 составляет TD2,γ = 5,0 мс + 214,29 мкс, а точное расстояние составляет ΔTF,γ = 285,71 мкс. Группы сот α, β и γ, таким образом, могут отличаться посредством различных точных расстояний 142,86, 214,29 и 285,71 мкс соответственно.
Фиг.6 показывает конкретную схему для неравномерного разнесения на уровне субкадра и на уровне символа PSC. Для структуры кадра, показанной на фиг.6, до 7 групп сот могут быть назначены до 7 различным периодам символа в субкадре преамбулы и тому же периоду символа в субкадре мидамбулы. PSC2 может быть отправлен в последнем периоде символа субкадра мидамбулы, как показано на фиг.6. В этом случае точное расстояние для группы сот g может быть задано как ΔTF,g=71,43×g мкс, для g=0, 1,..., 6. PSC2 также может быть отправлен в некотором другом периоде символа субкадра мидамбулы. SSC может быть отправлен в периоде символа до или после PSC1, если оценка канала от PSC1 используется для обнаружения SSC.
В другой схеме для структуры кадра, показанной на фиг.6, PSC1 для всех групп сот может быть отправлен в предварительно определенном периоде символа субкадра преамбулы, а PSC2 для 7 групп сот может быть отправлен в вплоть до 7 различных периодов символа субкадра мидамбулы. В этой схеме роли PSC1 и PSC2 переключаются, и SSC может быть отправлен рядом с PSC2 (вместо PSC1).
В еще одной схеме различным группам сот могут быть назначены различные периоды символа субкадра преамбулы, а также различные периоды символа субкадра мидамбулы. Для структуры кадра, показанной на фиг.6, до 13 группам сот могут быть назначены различные периоды символа субкадров преамбулы и мидамбулы так, что точное расстояние для группы g сот может быть задано как ΔTF,g=71,43×(g-6) мкс, для g=0, 1,..., 12. Для g<6 SSC может быть размещен в мидамбуле, так чтобы конкретные для соты оценки канала могли быть извлечены в синхронизированной сети и использованы для когерентной демодуляции SSC. Кроме того, g=6 может быть исключен, чтобы обеспечить конкретную для соты оценку канала, и доступное количество групп сот может быть сокращено до 12.
В общем, для структуры кадра с S периодов символа на субкадр до 2S-1 групп сот может поддерживаться посредством отправки PSC1 в одном периоде символа субкадра преамбулы и отправки PSC2 в одном периоде символа субкадра мидамбулы. Чтобы поддерживать когерентную демодуляцию SSC в синхронизированной сети, 2S-2 групп сот могут поддерживаться, как описано выше. Субкадр мидамбулы может быть выбран так, что приблизительное расстояние TC1 от субкадра преамбулы до субкадра мидамбулы или меньше чем, или больше чем приблизительное расстояние TC2 от субкадра мидамбулы до следующего субкадра преамбулы. Например, на фиг.6, субкадр мидамбулы может начаться через 5,0 мс (вместо 4,0 мс) после конца субкадра преамбулы или может начаться через любое значение, кроме 4,5 мс после конца субкадра преамбулы.
Система может использовать OFDM и/или SC-FDM со структурой поднесущей, имеющей всего K поднесущих. Для OFDM до K символов модуляции могут быть преобразованы до K поднесущих, и нулевые символы со значением сигнала в нуль могут быть преобразованы в оставшиеся поднесущие, если они имеют место. K-точечное обратное дискретное преобразование Фурье (IDFT) затем может быть выполнено для K символов, чтобы получить полезную часть, составленную из K выборок временной области. Последние C выборок полезной части могут быть скопированы и добавлены к началу полезной части, чтобы сформировать OFDM-символ, содержащий K+C выборок. C скопированных выборок называются циклическим префиксом или защитным интервалом, и C - это длина циклического префикса.
Для SC-FDM символы модуляции Q, которые должны быть отправлены во временной области по Q поднесущих, могут быть преобразованы в частотную область с помощью Q-точечного дискретного преобразования Фурье (DFT), чтобы получить Q преобразованных символов, где Q≤K. Q преобразованных символов могут быть преобразованы в Q поднесущих, используемых для передачи, и нулевые символы могут быть преобразованы в оставшиеся поднесущие, если они имеют место. K-точечное IDFT далее может быть выполнено для K символов, чтобы получить полезную часть, составленную из K выборок временной области. Последние C выборок полезной части могут быть скопированы и добавлены к началу полезной части, чтобы сформировать SC-FDM-символ, содержащий K+C выборок.
Циклический префикс, добавленный к каждому символу OFDM или каждому SC-FDM символу, может использоваться для того, чтобы бороться с межсимвольными помехами (ISI), вызываемыми посредством разброса задержек в канале с многолучевым распространением. Сигнал, переданный посредством соты, может достигнуть UE несколькими путями передачи сигналов. Разброс задержек - это разность между самыми ранними и самыми поздними поступающими копиями сигнала в UE. Чтобы эффективно бороться с ISI, длина циклического префикса может быть выбрана так, чтобы быть равной или большей ожидаемого разброса задержек, так чтобы циклический префикс содержал значительную часть всей энергии многолучевого распространения. Циклический префикс представляет фиксированную служебную информацию C выборок для каждого OFDM- или SC-FDM-символа.
Система может поддерживать несколько значений длины циклического префикса, которые могут использоваться для того, чтобы при возможности уменьшить объем служебной информации. Подходящая длина циклического префикса может быть выбрана для использования на основе ожидаемого разброса задержек, типа передачи и/или других факторов. Например, система может поддерживать два значения длины циклического префикса, маленькая длина циклического префикса может использоваться для конкретной для соты операции, а большая длина циклического префикса может использоваться для операции SFN. Таблица 1 представляет некоторые параметры, ассоциативно связанные с маленькой и большой длиной циклического префикса для структуры кадра, показанной на фиг.6, в которой субкадры преамбулы и мидамбулы имеют длительность 0,5 мс.
В еще одном аспекте расстояния между последовательными PSC используются для того, чтобы определить длину циклического префикса, используемую для принимаемой передачи. UE может не знать длину циклического префикса, используемую данной сотой в ходе поиска соты. UE может обнаруживать PSC и определять расстояния между пиками PSC, как описано выше. UE может определить длину циклического префикса, используемую для PSC, на основе расстояний. UE затем может выполнить обнаружение SSC со знанием длины циклического префикса, что позволяет уменьшить обработку и вероятность ложного обнаружения для SSC.
Фиг.6 показывает схему для передачи двух неравномерно разнесенных PSC и одного SSC в радиокадре с маленькой длиной циклического префикса, представленной в таблице 1. Суммарные расстояния TD1_S и TD2_S для трех групп сот α, β и γ с маленькой длиной циклического префикса представлены в таблице 2.
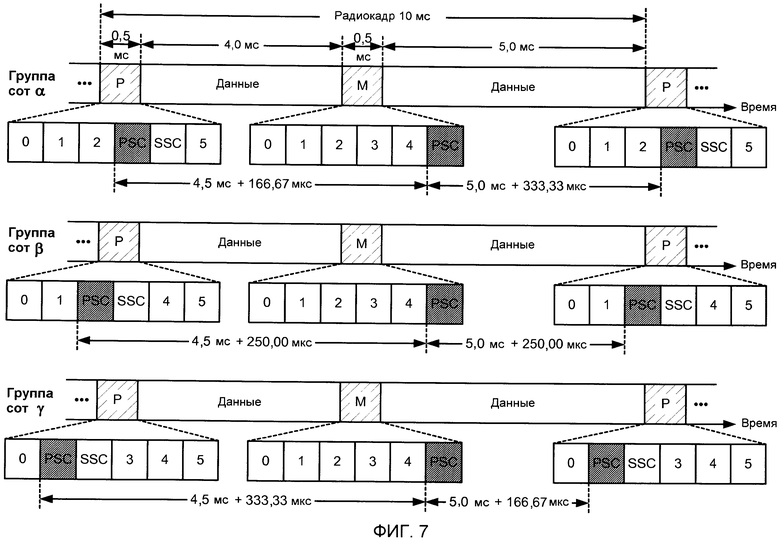
Фиг.7 показывает схему для передачи двух неравномерно разнесенных PSC и одного SSC в радиокадре с большой длиной циклического префикса, представленной в таблице 1. В этой схеме радиокадр имеет длительность 10 мс. Субкадры преамбулы и мидамбулы имеют длительность 0,5 мс и включают в себя шесть периодов символа, которым назначены индексы от 0 до 5. Каждый период символа имеет длительность 83,34 мкс.
Для неравномерного разнесения на уровне субкадра PSC1 и SSC отправляются в субкадре преамбулы, а PSC2 отправляется в субкадре мидамбулы. Расстояние от субкадра преамбулы до субкадра мидамбулы составляет TC1=4,5 мс, а расстояние от субкадра мидамбулы до следующего субкадра преамбулы составляет TC2=5,5 мс. Для неравномерного разнесения на уровне символа PSC1 для группы сот α отправляется в периоде символа 3 субкадра преамбулы, PSC1 для группы сот β отправляется в периоде символа 2, а PSC1 для группы сот γ отправляется в период символа 1. PSC2 для всех трех групп сот отправляются в периоде символа 5 субкадра мидамбулы. SSC для каждой группы сот отправляется сразу после PSC1 для этой группы сот. Суммарные расстояния TD1_L и TD2_L для этих трех групп сот α, β и γ с большой длиной циклического префикса представлены в таблице 2.
В общем, длина циклического префикса может быть определена на основе PSC за счет гарантирования того, что суммарные расстояния TD1 и TD2 для всех групп сот уникальны для всех поддерживаемых длин циклического префикса. Поскольку TD1+TD2 равно длительности радиокадра, обеспечение уникальности TD1 эквивалентно обеспечению уникальности TD1 и TD2. В схемах, показанных в фиг.6 и 7, суммарные расстояния уникальны, и длина циклического префикса может быть определена посредством (a) не помещения PSC1 в последний период символа субкадра преамбулы и (b) помещения PSC2 в последний период символа субкадра мидамбулы. Длина циклического префикса также может быть определена посредством помещения PSC2 в любой период символа субкадра мидамбулы.
В схемах, показанных на фиг.6 и 7, наименьшая разность между любым TD1_S с маленькой длиной циклического префикса и любым TD1_L с большой длиной циклического префикса составляет 24 мкс. Эта наименьшая разность соответствует TD1_S в 4,667 мс и TD1_L в 4,643 мс для группы сот α. Большая наименьшая разность может быть получена посредством выбора других периодов символа для PSC1 и/или PSC2. В общем, большая наименьшая разность может улучшить способность UE разрешить между маленькими и большими длинами циклического префикса в канале с многолучевым распространением.
В общем, уникальность суммарных расстояний TD1 и TD2 для различных групп сот и длин циклического префикса может быть достигнута посредством выбора соответствующих периодов символов и субкадров для PSC1 и PSC2 на основе нумерологии, применимой для системы, к примеру, длительности кадра, длительности субкадра, длительности символа, длин циклического префикса и т.д. Длина циклического префикса может быть определена на основе TD1 и/или TD2, полученного из пиков PSC.
P-SCH, описанный в данном документе, предоставляет возможность обнаружения границы кадра, группы сот и длины циклического префикса на стадии обнаружения PSC. В схемах, описанных выше, граница кадра может быть разрешена посредством размещения PSC1 и PSC2 так, что расстояние от PSC1 до PSC2 и расстояние от PSC2 до следующего PSC1 являются различными на субкадровом уровне детализации. Группа сот может быть разрешена посредством размещения PSC1 (или PSC2) в различных символах одного субкадра в зависимости от группы сот и посредством размещения PSC2 (или PSC1) в предварительно определенном символе другого субкадра. Размещение PSC1 (или PSC2) в различных символах предоставляет возможность извлечения конкретных для соты оценок канала даже в синхронизированной сети. Длина циклического префикса может быть разрешена посредством размещения PSC1 и PSC2 так, что уникальные расстояния получаются для различных поддерживаемых длин циклического префикса. Граница кадра, группа сот и длина циклического префикса также могут быть разрешены при других неравномерных размещениях PSC. Один PSC может использоваться и для PSC1, и для PSC2, чтобы снизить сложность обнаружения PSC (к примеру, согласованной фильтрации).
SSC может быть помещен в известном смещении времени относительно PSC1 (или PSC2). Местоположение SSC в таком случае должно быть известно после завершения обнаружения PSC. Оценка канала, полученная из PSC1 (или PSC2), может использоваться для когерентного обнаружения SSC, что позволяет повысить производительность обнаружения SSC и снизить сложность. SSC может быть конкретным для соты и может передавать идентификатор соты или другую информацию.
1. Последовательности P-SCH и S-SCH
Поиск соты может быть относительно сложным и может расходовать значительную электроэнергию аккумулятора для карманного устройства. Низкая сложность и высокая производительность обнаружения, таким образом, желательны и для P-SCH, и для S-SCH. Повышенная производительность обнаружения может быть достигнута для S-SCH посредством использования P-SCH в качестве оценки канала. P-SCH в таком случае может быть выполнен с возможностью предоставить хорошую эффективность оценки канала и оценки сдвига частоты.
Последовательность P-SCH - это последовательность или код синхронизации, используемый для того, чтобы формировать PSC, отправленные по P-SCH. Последовательность P-SCH может быть выбрана на основе различных соображений, таких как производительность (к примеру, в отношении поиска синхронизации, корректировки сдвига частоты и оценки канала) и оперативная сложность (к примеру, обнаружение PSC).
Последовательность P-SCH может быть задана на основе последовательности CAZAC (нулевая автокорреляция с постоянной амплитудой). Некоторые примерные последовательности CAZAC включают в себя последовательность Чу, последовательность Франка, обобщенную линейно-частотно-модулированную последовательность (GCL), последовательность Голомба, последовательности P1, P3, P4 и Px и т.д. Последовательности CAZAC могут предоставлять нулевую автокорреляцию, которая полезна для точной оценки характеристики канала и сокращения количества времени для поиска синхронизации. Последовательности GCL и Чу могут иметь неоднозначность между смещением синхронизации и сдвигом частоты. Последовательность Франка может иметь ухудшенную эффективность частичной корреляции. Частичная корреляция - это корреляция для части последовательности вместо всей последовательности.
В одной схеме последовательность P-SCH задается на основе обобщенной (или модулированной) последовательности Франка. Последовательность Франка f (n) может быть выражена как:
 для n=0,..., 1, L2-1, уравнение (1)
для n=0,..., 1, L2-1, уравнение (1)
где L2 - это длина последовательности Франка, а L и p могут быть любыми положительными целочисленными значениями, относительно простыми друг для друга.
Обобщенная последовательность Франка g(n) затем может быть извлечена следующим образом:
 для n=0,..., L2-1, уравнение (2)
для n=0,..., L2-1, уравнение (2)
где pn(n) является последовательностью псевдошума (PN) постоянной величины.
Чтобы получить хорошую эффективность частичной корреляции, базовая последовательность длины L, имеющая хорошее свойство автокорреляции, может быть сформирована любым способом, известным в данной области техники. Например, базовая последовательность может быть последовательностью Голея, комплементарной последовательностью Голея и т.д. Базовая последовательность может быть повторена L раз и конкатенирована, чтобы сформировать последовательность pn(n) длины L2. Например, обобщенная последовательность Франка длины 64 может быть сформирована посредством умножения последовательности Франка длиной 64 на PN-последовательность длиной 64, полученную посредством повторения комплементарной последовательности Голея длиной 8 {1, 1, 1, -1, 1, 1, -1, 1} восемь раз.
Произведение L повторений базовой последовательности длиной L с хорошим свойством автокорреляции и последовательности Франка длиной L2 позволяет повысить эффективность сегментированной или частичной корреляции и комбинирования энергии. Повторяющаяся базовая последовательность позволяет подавить помехи многолучевого распространения, что может способствовать улучшению. После корректировки смещения синхронизации и сдвига частоты точная оценка канала может быть получена (обусловленная свойством CAZAC последовательности Франка) посредством выполнения полной корреляции с обобщенной последовательностью Франка.
В другой схеме пара последовательностей P-SCH p 1 (n) и p 2 (n) длины 2L может быть задана на основе комплементарных последовательностей Голея (GCS) длины L следующим образом:
p 1 (n)=CP+A+B, и
p 2 (n)=CP+B+A, уравнение (3)
где A и B - это комплементарные последовательности Голея из одной пары GCS, а CP - это циклический префикс. Формирователь Голея может сформировать один сегмент длины L из верхнего ветвления и другой сегмент длины L из нижнего ветвления. Например, последовательности P-SCH длины 64 (без учета циклического префикса) могут быть сформированы с двумя сегментами комплементарных последовательностей Голея длины L для A и B. Последовательности P-SCH также могут быть сформированы на основе иерархических комплементарных последовательностей Голея, которые являются комплементарными последовательностями Голея, сформированными с иерархической структурой.
UE может выполнить корреляцию для входных выборок с помощью коррелятора PSC, чтобы получить результаты корреляции для обеих последовательностей A и B в каждом периоде выборки, и может сохранить результаты корреляции. В каждом периоде выборок UE может комбинировать результаты корреляции, полученные для последовательностей A и B в этом периоде выборок, с результатами корреляции, полученными для последовательностей B и A в L периодов выборок ранее, чтобы получить результаты полной корреляции для конкатенированных последовательностей A+B и B+A. UE может тем самым эффективно выполнять полные корреляции и для A+B, и для B+A на основе результатов частичной корреляции для A и B. UE также может использовать результат корреляции для A (или B) и результат корреляции для B (или A) из L периодов выборок ранее, чтобы определить разность фаз между двумя сегментами. UE может использовать эту разность фаз для начальной оценки погрешности частоты.
Либо p 1 (n), либо p 2 (n) могут использоваться для PSC в зависимости от одного бита информации, которая должна быть отправлена через PSC. Например, p 1 (n) может использоваться для того, чтобы передать маленькую длину циклического префикса, а p 2 (n) может использоваться для того, чтобы передать большую длину циклического префикса. Если два PSC отправлены в радиокадре, как описано выше, то больше одного бита информации может быть передано через эти два PSC посредством выбора p 1 (n) и/или p 2 (n).
Альтернативно, пара последовательностей P-SCH p' 1 (n) и p' 2 (n) длины L может быть задана на основе комплементарных последовательностей Голея длины L следующим образом:
p' 1 (n)=CP+A, и
p' 2 (n)=CP+B уравнение (4)
Либо p' 1 (n), либо p' 2 (n) могут использоваться для каждого PSC в радиокадре в зависимости от одного бита информации, которая должна быть отправлена через PSC. Например, p' 1 (n) может использоваться для PSC1, а p' 2 (n) может использоваться для PSC2, чтобы указать длину циклического префикса или какую-либо другую информацию.
Пара GCS также может использоваться для различных сот в системе. Соты могут быть упорядочены в группы. Каждой группе может быть назначена различная последовательность P-SCH (вместо одной и той же последовательности P-SCH для всех сот), что может дать возможность UE извлекать более точные оценки канала на основе PSC.
Последовательность P-SCH также может быть получена посредством (к примеру, всеобъемлющего) поиска последовательностей синхронизации с низкой сложностью реализации и хорошими свойствами корреляции.
Последовательность S-SCH - это последовательность или код синхронизации, используемый для того, чтобы формировать SSC, отправляемый по S-SCH. Последовательность S-SCH может передавать такую информацию, как идентификатор соты, число передающих антенн в узле B, ширина полосы пропускания системы и т.д. Различные последовательности S-SCH могут быть заданы для различных возможных идентификаторов соты, по одной последовательности S-SCH для каждого идентификатора соты. Для обнаружения SSC входные выборки могут быть коррелированы с различными последовательностями S-SCH, соответствующими различным гипотезам идентификатора соты.
В одной схеме последовательности S-SCH задаются на основе ортогональных или псевдоортогональных последовательностей с большим размером набора. Например, много псевдоортогональных последовательностей могут быть сформированы с одной или более базовых последовательностей и различных сдвигов времени. Базовые последовательности могут быть последовательностью GCL или Чу с различными индексами последовательности, PN-последовательностями частотной области и т.д. Набор псевдоортогональных последовательностей может быть выбран на основе свойства корреляции и сложности. Число псевдоортогональных последовательностей в наборе может быть определено на основе числа возможных гипотез для информации, отправленной по S-SCH, к примеру, числа возможных идентификаторов соты, если только эта информацию отправляется по S-SCH.
В другой схеме последовательности S-SCH задаются на основе фазомодулированных псевдоортогональных последовательностей, которые могут использовать оценку канала, полученную из P-SCH. Может быть сформирован набор псевдоортогональных последовательностей. Фазовый угол каждого символа данной псевдоортогональной последовательности может быть сдвинут на одну величину на основе схемы модуляции, такой как BPSK, QPSK и т.д. Количество гипотез, которые должны быть разрешены посредством псевдоортогональных последовательностей, может быть сокращено на 1/2 для BPSK, на 1/4 для QPSK или даже большую величину для схем модуляции более высокого порядка, чем QPSK.
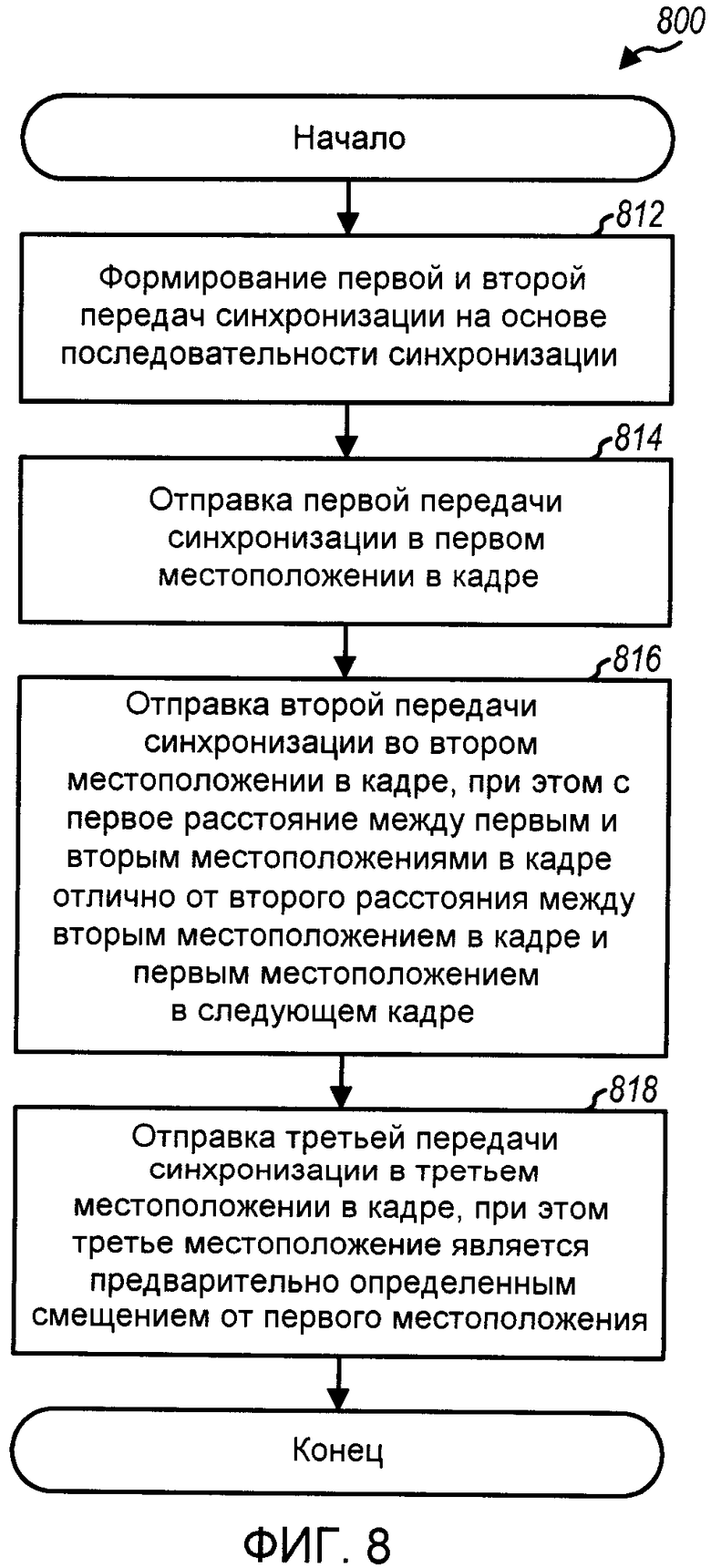
Фиг.8 показывает процесс 800, выполняемый посредством узла B для того, чтобы поддержать поиск соты множеством UE. Первая и вторая передачи синхронизации формируются на основе последовательности синхронизации (этап 812). Последовательность синхронизации может быть извлечена на основе последовательности CAZAC или PN-последовательности, или и той, и другой, к примеру, как показано в уравнении (2). Последовательность синхронизации также может быть извлечена на основе комплементарных последовательностей Голея, к примеру, как показано в уравнении (3) или (4). Первая и вторая передачи синхронизации также могут быть сформированы на основе одной из нескольких длин циклического префикса. Первая передача синхронизации отправляется в первом местоположении в кадре (этап 814). Вторая передача синхронизации отправляется во втором местоположении в кадре (этап 816). Первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре. Первая и вторая передачи синхронизации могут соответствовать PSC, отправляемым по P-SCH.
Кадр может содержать несколько субкадров, и первое и второе местоположения могут быть в различных субкадрах кадра. Первое местоположение может быть в субкадре в начале кадра, а второе местоположение может быть в субкадре, ближайшем к, но не в середине кадра. Первое число субкадров, соответствующих первому расстоянию, может отличаться от второго числа субкадров, соответствующих второму расстоянию. Каждый субкадр может содержать несколько периодов символа. Несколько групп идентификаторов соты могут быть ассоциативно связаны с (a) различными периодами символа для первой передачи синхронизации и (b) одним периодом символа для второй передачи синхронизации.
Третья (или дополнительная) передача синхронизации может быть отправлена в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения (этап 818). Например, первое и третье местоположения могут быть в смежные периоды символа. Третья передача синхронизации может соответствовать SSC, отправленному по S-SCH.
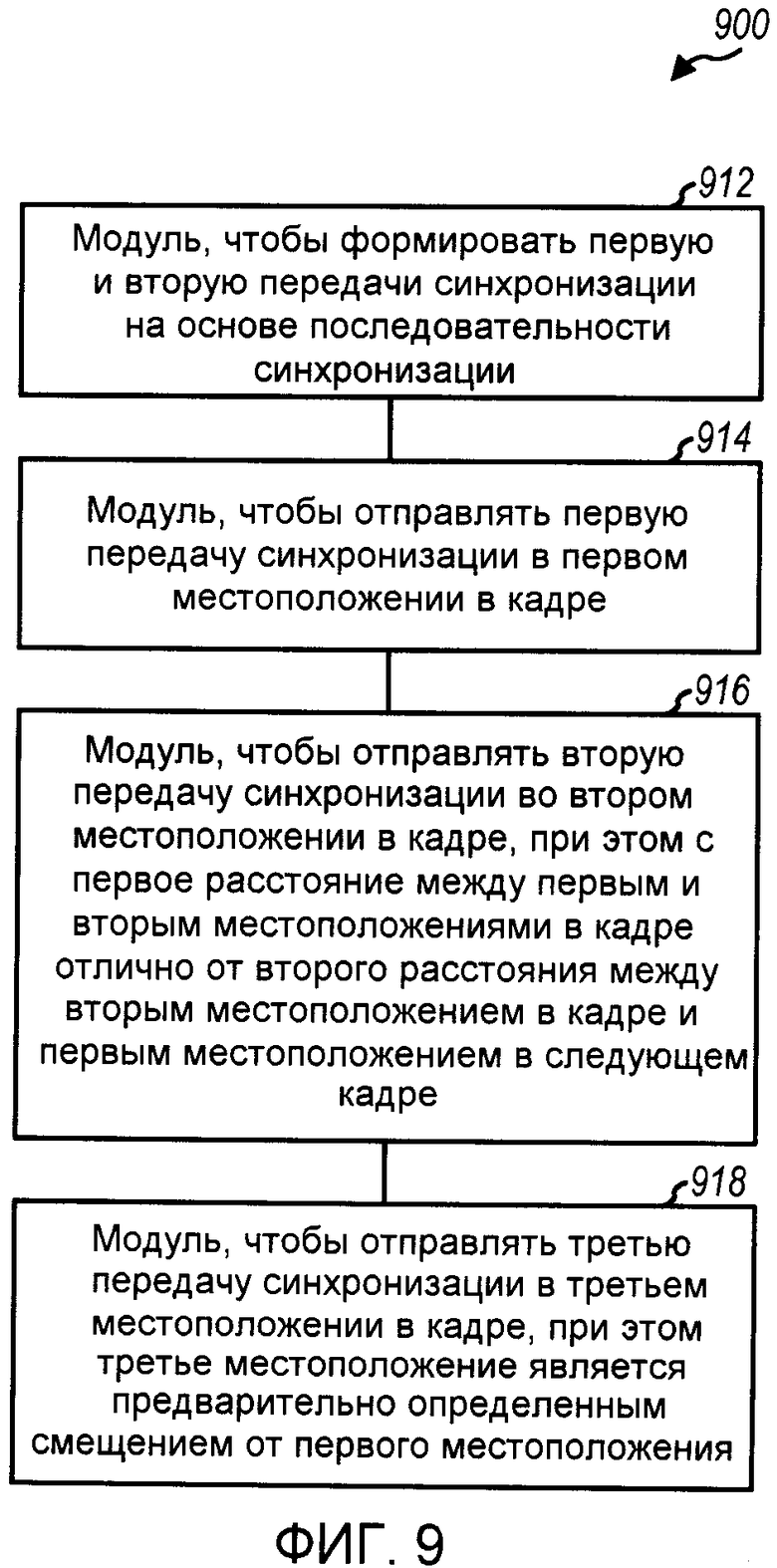
Фиг.9 показывает устройство 900, поддерживающее поиск соты посредством UE. Устройство 900 включает в себя средство формирования первой и второй передач синхронизации на основе последовательности синхронизации (модуль 912), средство отправки первой передачи синхронизации в первом местоположении в кадре (модуль 914) и средство отправки второй передачи синхронизации во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре (модуль 916). Устройство 900 дополнительно включает в себя средство отправки третьей передачи синхронизации в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения (модуль 918). Модули 912-918 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д. либо любую комбинацию вышеозначенного.
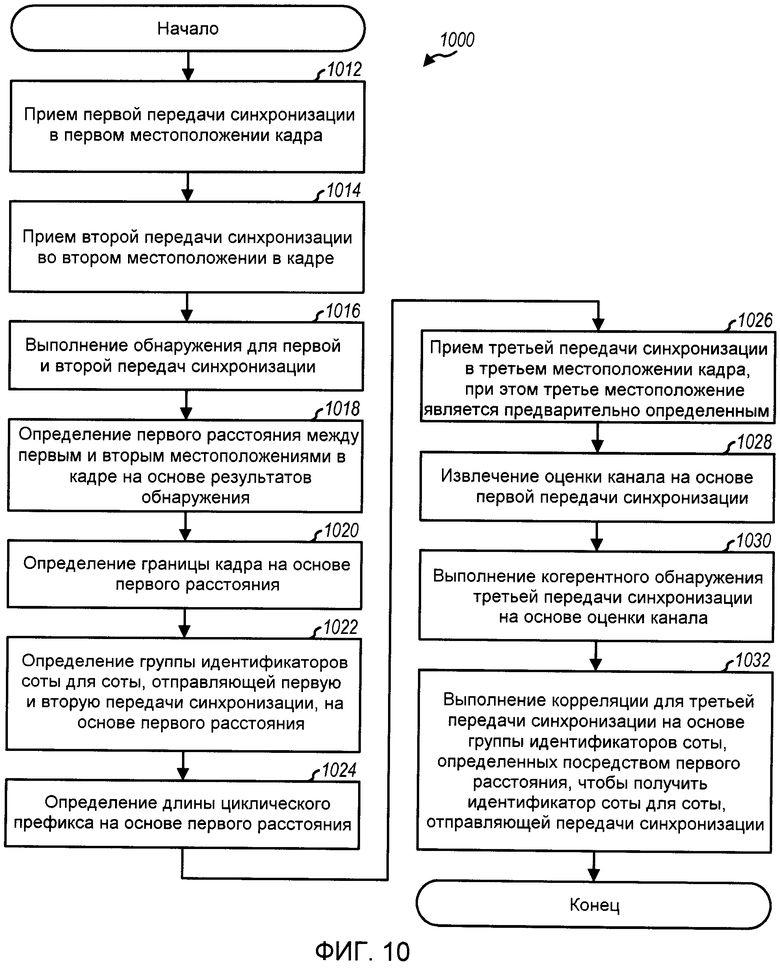
Фиг.10 показывает процесс 1000, выполняемый посредством UE для поиска соты. Первая передача синхронизации принимается в первом местоположении в кадре (этап 1012), а вторая передача синхронизации принимается во втором местоположении в кадре (этап 1014). Обнаружение выполняется для первой и второй передач синхронизации, к примеру, на основании одного согласованного фильтра, если две передачи синхронизации формируются с одной последовательностью синхронизации (этап 1016). Первое расстояние между первым и вторым местоположениями в кадре определяется на основе результатов обнаружения (этап 1018). Первое расстояние может быть задано, как TD1=TC1+ΔTF, и может быть составлено из приблизительного расстояния TC1 и точного расстояния ΔTF. Первое расстояние отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре. Для этапа 1016 входные выборки могут быть коррелированы с последовательностью синхронизации, чтобы обнаружить первую и вторую передачи синхронизации. Первое и второе местоположения могут затем быть определены на основе результатов корреляции.
Граница кадра может быть определена на основе первого расстояния, к примеру, на основании приблизительного расстояния TC1 (этап 1020). Группа идентификаторов соты для соты, отправляющей первую и вторую передачи синхронизации, также может быть определена на основе первого расстояния, к примеру, на основании точного расстояния ΔTF (этап 1022). Длина циклического префикса также может быть определена на основе первого расстояния (этап 1024). Этапы 1020, 1022 и 1024 могут быть выполнены исключительно на основе первого расстояния. Альтернативно, второе расстояние также может быть определено и использовано на этапах 1020, 1022 и 1024, что может уменьшить ошибку.
Третья передача синхронизации может быть принята в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения (этап 1026). Оценка канала может быть извлечена на основе первой передачи синхронизации (этап 1028). Когерентное обнаружение третьей передачи синхронизации может быть выполнено на основе оценки канала (этап 1030). Корреляция для третьей передачи синхронизации может быть выполнена на основе группы идентификаторов соты, определенных посредством первого расстояния, чтобы получить идентификатор соты для соты, отправляющей передачи синхронизации (этап 1032).
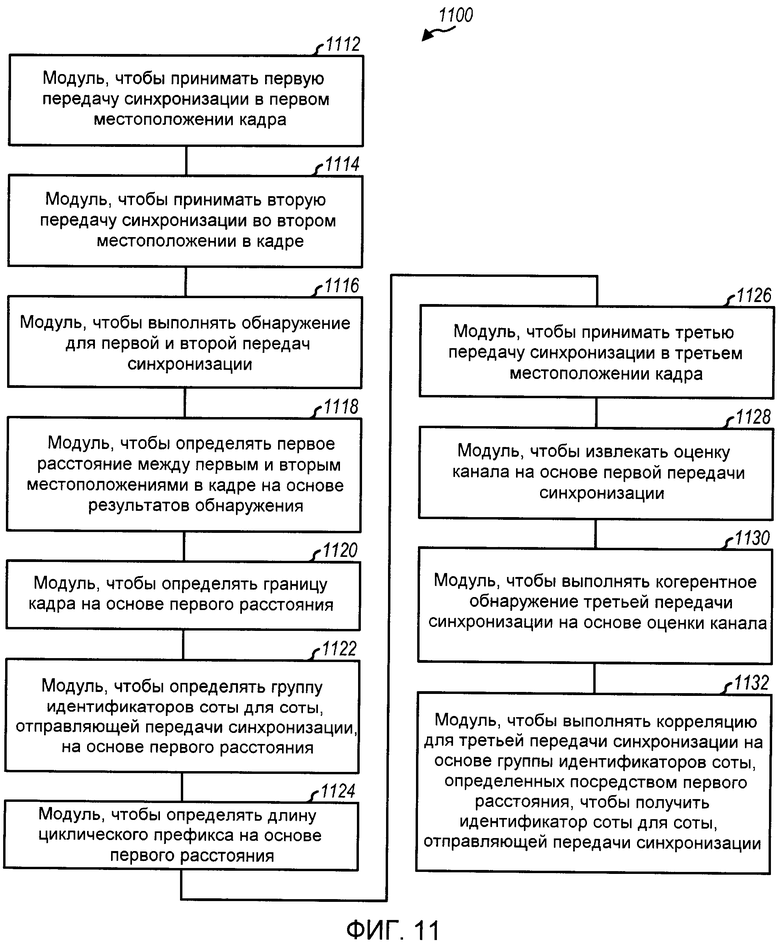
Фиг.11 показывает устройство 1100 для выполнения поиска соты. Устройство 1100 включает в себя средство приема первой передачи синхронизации в первом местоположении в кадре (модуль 1112), средство приема второй передачи синхронизации во втором местоположении в кадре (модуль 1114), средство выполнения обнаружения для первой и второй передач синхронизации (модуль 1116) и средство определения первого расстояния между первым и вторым местоположениями в кадре на основе результатов обнаружения, при этом первое расстояние отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре (модуль 1118). Устройство 1100 дополнительно включает в себя средство определения границы кадра на основе первого расстояния (модуль 1120), средство определения группы идентификаторов соты для соты, отправляющей первые и вторые передачи синхронизации, на основе первого расстояния (модуль 1122), и средство определения длины циклического префикса на основе первого расстояния (модуль 1124).
Устройство 1100 дополнительно включает в себя средство приема третьей передачи синхронизации в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения (модуль 1126), средство извлечения оценки канала на основе первой передачи синхронизации (модуль 1128), средство выполнения когерентного обнаружения третьей передачи синхронизации на основе оценки канала (модуль 1130) и средство выполнения корреляции для третьей передачи синхронизации на основе группы идентификаторов соты, определенных посредством первого расстояния, чтобы получить идентификатор соты для соты, отправляющей передачи синхронизации (модуль 1132). Модули 1112-1132 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д. либо любую комбинацию вышеозначенного.
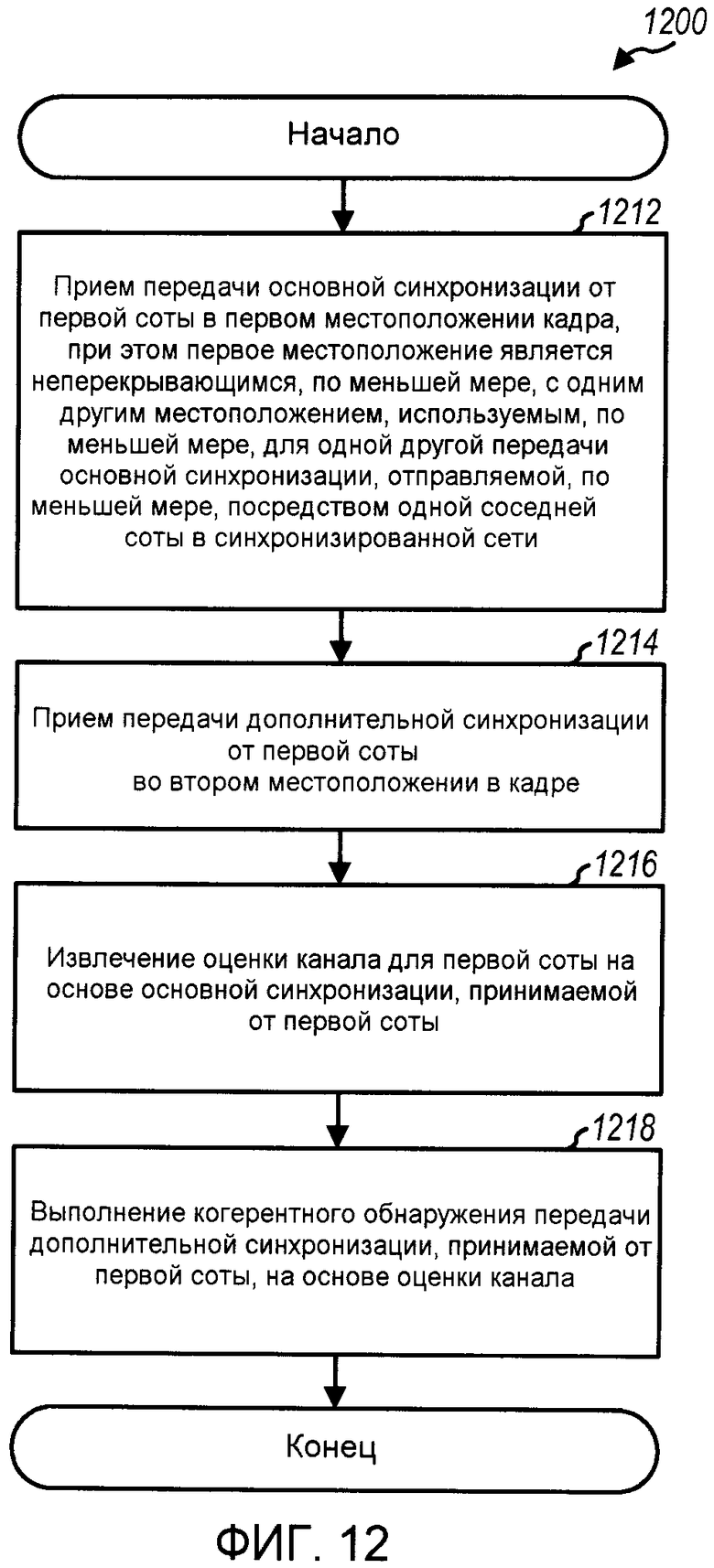
Фиг.12 показывает процесс 1200, выполняемый посредством UE для поиска соты в синхронизированной сети. Передача основной синхронизации принимается от первой соты в первом местоположении в кадре, при этом первое местоположение является неперекрывающимся, по меньшей мере, с одним другим местоположением, используемым, по меньшей мере, для одной другой передачи основной синхронизации, отправляемой, по меньшей мере, посредством одной соседней соты в синхронизированной сети (этап 1212). Передача дополнительной синхронизации принимается от первой соты во втором местоположении в кадре (этап 1214). Оценка канала для первой соты извлекается на основе основной синхронизации, принимаемой от первой соты (этап 1216). Когерентное обнаружение передачи дополнительной синхронизации, принимаемой от первой соты, выполняется на основе оценки канала (этап 1218). Передачи основной синхронизации также могут быть приняты от первой соты и, по меньшей мере, одной соседней соты в третьем местоположении в кадре. Передачи основной синхронизации, которые перекрываются среди соседних сот в синхронизированной сети, могут использоваться для того, чтобы улучшить прием передачи основной синхронизации. Передачи основной синхронизации, которые не перекрываются среди соседних сот, могут использоваться для того, чтобы получить конкретные для соты оценки канала.
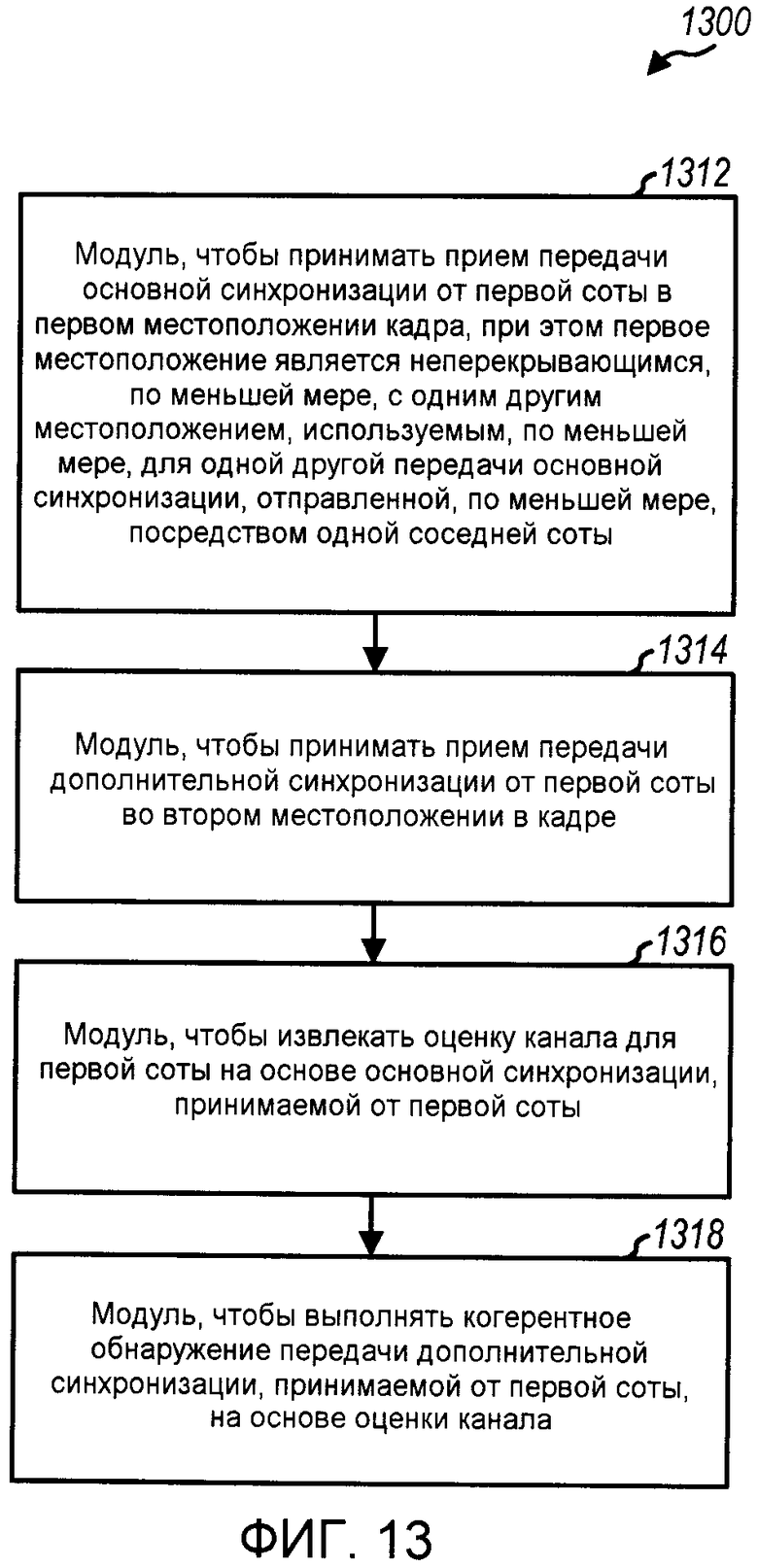
Фиг.13 показывает устройство 1300 для выполнения поиска соты. Устройство 1300 включает в себя средство приема передачи основной синхронизации от первой соты в первом местоположении в кадре, при этом первое местоположение является неперекрывающимся, по меньшей мере, с одним другим местоположением, используемым, по меньшей мере, для одной другой передачи основной синхронизации, отправленной, по меньшей мере, посредством одной соседней соты (модуль 1312), средство приема передачи дополнительной синхронизации от первой соты во втором местоположении в кадре (модуль 1314), средство извлечения оценки канала для первой соты на основе основной синхронизации, принимаемой от первой соты (модуль 1316), и средство выполнения когерентного обнаружения передачи дополнительной синхронизации, принимаемой от первой соты, на основе оценки канала (модуль 1318). Модули 1312-1316 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д. либо любую комбинацию вышеозначенного.
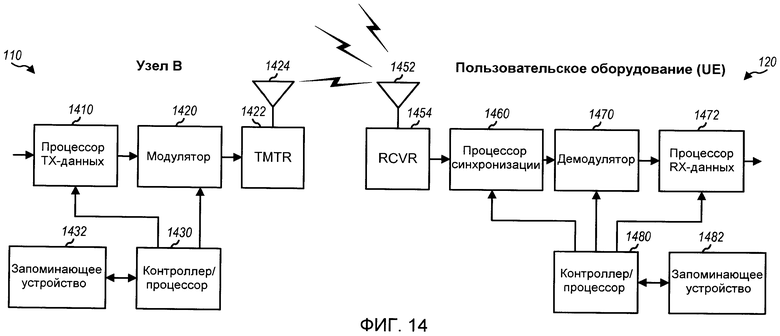
Фиг.14 показывает блок-схему схемы узла B 110 и UE 120, которые являются одним из узлов B и UE на фиг.1. В узле B 110 процессор 1410 данных передачи (TX) обрабатывает (к примеру, кодирует, перемежает и выполняет символьное преобразование) данные трафика и формирует символы данных. Процессор 1410 также формирует символы служебных сигналов для служебных каналов (к примеру, P-SCH и S-SCH) и контрольные символы для контрольного канала. Модулятор 1420 обрабатывает данные, символы служебных сигналов и контрольные символы так, как указано системой, и предоставляет выходные символы шумоподобной последовательности. Модулятор 1420 может выполнить модуляцию для OFDM, SC-FDM, CDMA и т.д. Передающее устройство (TMTR) 1422 обрабатывает (к примеру, преобразует в аналоговую форму, усиливает, фильтрует и преобразует с понижением частоты) выходные символы шумоподобной последовательности и формирует сигнал нисходящей линии связи, который передается через антенну 1424.
В UE 120 антенна 1452 принимает сигналы нисходящей линии связи от узла B 110 и других узлов B и предоставляет принимаемый сигнал. Приемное устройство (RCVR) 1454 приводит к требуемым параметрам (к примеру, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) принимаемый сигнал и предоставляет входные выборки. Процессор 1460 синхронизации (Sync) выполняет обнаружение для P-SCH и S-SCH на основе входных выборок и предоставляет обнаруженные узлы B или соты. Процессор 1460 может извлечь оценку канала для каждого обнаруженного узла B на основе его PSC и выполнить когерентное обнаружение SSC с помощью оценки канала. Процессор 1460 может предоставлять различные типы информации, такие как границы кадра, идентификатор соты и длина циклического префикса для каждого обнаруженного узла B. Демодулятор (Demod) 1470 обрабатывает входные выборки на основе информации от процессора 1460 синхронизации, а также способом, комплементарным обработке посредством модулятора 1420, чтобы получить оценки символа. Процессор 1472 данных приема (RX) обрабатывает (к примеру, выполняет обратное символьное преобразование, обратное перемежение и декодирование) оценки символов и предоставляет декодированные данные и служебные сигналы. В общем, обработка посредством демодулятора 1470 и процессора 1472 RX-данных комплементарна обработке посредством модулятора 1420 и процессора 1410 TX-данных соответственно в узле B 110.
Контроллеры/процессоры 1430 и 1480 управляют работой различных процессоров в узле B 110 и UE 120 соответственно. Процессор 1430 может реализовать процесс 800 на фиг.8 и/или другие процессы, чтобы поддерживать поиск соты посредством UE. Процессор 1480 может реализовать процесс 1000 на фиг.10 и/или другие процессы, чтобы выполнить поиск соты, чтобы обнаруживать узлы B. Запоминающие устройства 1432 и 1482 сохраняют данные и программные коды для узла B 110 и UE 120 соответственно.
Описанные в данном документе методики могут быть реализованы различными средствами. Например, эти методики могут быть реализованы в аппаратных средствах, микропрограммном обеспечении, программном обеспечении или их комбинации. При реализации в аппаратных средствах модули обработки в объекте (к примеру, узле B или UE) могут быть реализованы в одной или нескольких специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем матричных БИС (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных модулях, предназначенных для того, чтобы выполнять описанные в данном документе функции, в компьютере или в комбинации вышеозначенного.
При реализации в микропрограммном обеспечении и/или программном обеспечении методики могут быть реализованы с помощью модулей (к примеру, процедур, функций и т.п.), которые выполняют описанные в данном документе функции. Микропрограммные и/или программные коды могут быть сохранены в запоминающем устройстве (к примеру, в запоминающем устройстве 1432 или 1482 на фиг.14) и приведены в исполнение процессором (к примеру, процессором 1430 или 1480). Запоминающее устройство может быть реализовано в процессоре или внешне по отношению к процессору.
Предшествующее описание изобретения предоставлено для того, чтобы дать возможность любому специалисту в данной области техники создавать или использовать изобретение. Различные модификации в изобретении должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам без отступления от сущности и объема изобретения. Таким образом, изобретение не предназначено для того, чтобы быть ограниченным описанными в данном документе примерами, а должно удовлетворять самому широкому объему, согласованному с принципами и новыми функциями, раскрытыми в данном документе.
Изобретение относится к технике беспроводной связи и может быть использовано для поддержания поиска соты. Чтобы поддержать поиск соты, несколько (к примеру, две) передач синхронизации отправляются в кадре с неравномерным разнесением, первую передачу основной синхронизации отправляют в первом местоположении в кадре, вторую передачу основной синхронизации отправляют во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре. Отправляют одну передачу дополнительной синхронизации в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения. Технический результат - увеличение быстродействия и уменьшение ошибок при поиске соты. 9 н. и 28 з.п. ф-лы, 15 ил., 2 табл.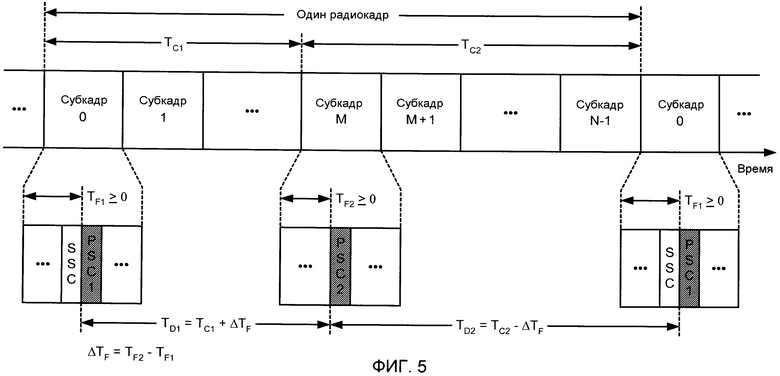
1. Устройство для поддержки поиска соты, содержащее:
процессор, выполненный с возможностью отправлять первую передачу основной синхронизации в первом местоположении в кадре и отправлять вторую передачу основной синхронизации во втором местоположении в кадре, при этом первое расстояние между первыми и вторыми местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре, при этом процессор дополнительно выполнен с возможностью отправлять только одну передачу дополнительной синхронизации в кадре, при этом передача дополнительной синхронизации передается в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения; и
запоминающее устройство, соединенное с процессором, и хранящее, по меньшей мере, программные коды, исполняемые процессором.
2. Устройство по п.1, в котором кадр содержит множество субкадров, при этом первое местоположение находится в первом субкадре кадра, и при этом второе местоположение находится во втором субкадре кадра, причем первый и второй субкадры соответствуют любым двум из множества субкадров в кадре.
3. Устройство по п.2, в котором первый субкадр находится в начале кадра, и второй субкадр является ближайшим к, но не находится в середине кадра.
4. Устройство по п.2, в котором первое число субкадров, соответствующих первому расстоянию, отличается от второго числа субкадров, соответствующих второму расстоянию.
5. Устройство по п.2, в котором множество групп идентификаторов соты ассоциативно связано с множеством периодов символа в первом субкадре, и в котором первое местоположение соответствует одному из множества периодов символа в первом субкадре.
6. Устройство по п.5, в котором процессор выполнен с возможностью определять период символа в первом субкадре для первой передачи основной синхронизации на основе группы идентификаторов соты для соты, отправляющей первую и вторую передачи основной синхронизации.
7. Устройство по п.5, в котором множество групп идентификаторов сот ассоциативно связано с предварительно определенным периодом символа во втором субкадре.
8. Устройство по п.1, в котором кадр содержит множество периодов символа, и в котором число периодов символа, соответствующих первому расстоянию, является одним из множества возможных чисел периодов символа для первого расстояния.
9. Устройство по п.1, в котором процессор выполнен с возможностью формировать первую и вторую передачи основной синхронизации на основе последовательности синхронизации, извлеченной на основе, по меньшей мере, одной из последовательности CAZAC (нулевая автокорреляция с постоянной амплитудой), последовательности псевдошума (PN), последовательности Голея и комплементарной последовательности Голея.
10. Устройство по п.1, в котором процессор выполнен с возможностью формировать первую и вторую передачи основной синхронизации на основе одной из нескольких длин циклического префикса.
11. Устройство по п.1, в котором первое и третье местоположения находятся в смежных периодах символа.
12. Устройство по п.1, в котором процессор выполнен с возможностью отправлять первую и вторую передачи основной синхронизации по каналу основной синхронизации (P-SCH).
13. Устройство по п.1, в котором процессор выполнен с возможностью отправлять передачу дополнительной синхронизации по каналу дополнительной синхронизации (S-SCH).
14. Устройство для поддержки поиска соты, содержащее:
процессор, выполненный с возможностью отправлять первый код основной синхронизации (PSC) по каналу основной синхронизации (P-SCH) в первом местоположении в кадре и отправлять второй PSC по P-SCH во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре, при этом процессор дополнительно выполнен с возможностью отправлять один код дополнительной синхронизации (SSC) по каналу дополнительной синхронизации (S-SCH) в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения; и
запоминающее устройство, соединенное с процессором, и хранящее, по меньшей мере, программные коды, исполняемые процессором.
15. Способ поддержки поиска соты в системе беспроводной связи, содержащий этапы, на которых:
отправляют первую передачу основной синхронизации в первом местоположении в кадре;
отправляют вторую передачу основной синхронизации во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре; и
отправляют одну передачу дополнительной синхронизации в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения.
16. Способ по п.15, в котором кадр содержит множество субкадров, и в котором первое число субкадров, соответствующих первому расстоянию, отличается от второго числа субкадров, соответствующих второму расстоянию.
17. Способ по п.16, в котором каждый субкадр содержит множество периодов символа, и в котором число периодов символа, соответствующих первому расстоянию, является одним из множества возможных чисел периодов символа для первого расстояния.
18. Способ по п.15, в котором множество групп идентификаторов соты ассоциативно связано с множеством возможных периодов символа для первой передачи основной синхронизации, и при этом способ дополнительно содержит этап, на котором:
определяют период символа для первой передачи синхронизации на основе группы идентификаторов соты для соты, отправляющей первую и вторую передачи основной синхронизации.
19. Устройство для поддержки поиска соты, содержащее:
средство отправки первой передачи основной синхронизации в первом местоположении в кадре;
средство отправки второй передачи основной синхронизации во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре; и
средство отправки одной передачи дополнительной синхронизации в третьем местоположении кадра, при этом третье местоположение является предварительно определенным смещением от первого местоположения.
20. Устройство по п.19, в котором множество групп идентификаторов соты ассоциативно связано с множеством возможных периодов символа для первой передачи основной синхронизации, и при этом устройство дополнительно содержит:
средство определения периода символа для первой передачи основной синхронизации на основе группы идентификаторов соты для соты, отправляющей первую и вторую передачи основной синхронизации.
21. Машиночитаемый носитель, включающий в себя инструкции, сохраненные на нем, которые при исполнении компьютером предписывают компьютеру выполнять способ поддержки поиска соты в системе беспроводной связи, при этом инструкции содержат:
первый набор инструкций для отправки первой передачи основной синхронизации в первом местоположении в кадре;
второй набор инструкций для отправки второй передачи основной синхронизации во втором местоположении в кадре, при этом первое расстояние между первым и вторым местоположениями в кадре отличается от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре; и
третий набор инструкций для отправки одной передачи дополнительной синхронизации в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения.
22. Устройство для поддержки поиска соты, содержащее:
процессор, выполненный с возможностью принимать первую передачу основной синхронизации в первом местоположении кадра, принимать вторую передачу основной синхронизации во втором местоположении в кадре, чтобы выполнить обнаружение первой и второй передач основной синхронизации, и определять первое расстояние между первыми и вторыми местоположениями в кадре, при этом первое расстояние отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре, при этом процессор дополнительно выполнен с возможностью принимать только одну передачу дополнительной синхронизации в кадре, при этом передача дополнительной синхронизации принимается в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения; и
запоминающее устройство, соединенное с процессором, и хранящее, по меньшей мере, программные коды, исполняемые процессором.
23. Устройство по п.22, в котором процессор выполнен с возможностью коррелировать входные выборки с последовательностью синхронизации, чтобы обнаруживать первую и вторую передачи основной синхронизации и определять первое и второе местоположения на основе результатов корреляции.
24. Устройство по п.22, в котором процессор выполнен с возможностью выполнять корреляцию для первой и второй передач основной синхронизации на основе одного согласованного фильтра.
25. Устройство по п.22, в котором процессор выполнен с возможностью определять границу кадра на основе первого расстояния.
26. Устройство по п.22, в котором процессор выполнен с возможностью определять группу идентификаторов соты для соты, отправляющей первую и вторую передачи основной синхронизации, на основе первого расстояния.
27. Устройство по п.22, в котором процессор выполнен с возможностью определять длину циклического префикса, используемую сотой, отправляющей первую и вторую передачи основной синхронизации, на основе первого расстояния.
28. Устройство по п.22, в котором процессор выполнен с возможностью извлекать оценку канала на основе первой передачи основной синхронизации и выполнять когерентное обнаружение передачи дополнительной синхронизации на основе оценки канала.
29. Устройство по п.22, в котором процессор выполнен с возможностью определять группу идентификаторов соты на основе первого расстояния и выполнять корреляцию для передачи дополнительной синхронизации на основе группы идентификаторов соты, чтобы получить идентификатор соты для соты, отправляющей первую и вторую передачи основной синхронизации и передачи дополнительной синхронизации.
30. Способ поддержки поиска соты в системе беспроводной соты, содержащий этапы, на которых:
принимают первую передачу основной синхронизации в первом местоположении кадра;
принимают вторую передачу основной синхронизации во втором местоположении в кадре;
выполняют обнаружение для первой и второй передач основной синхронизации;
определяют первое расстояние между первым и вторым местоположениями в кадре, при этом первое расстояние отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре;
принимают только одну передачу дополнительной синхронизации в кадре, при этом дополнительную передачу принимают в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения;
извлекают оценку канала на основе первой передачи основной синхронизации; и
выполняют когерентное обнаружение передачи дополнительной синхронизации на основе оценки канала.
31. Способ по п.30, дополнительно содержащий этап, на котором:
определяют границу кадра на основе первого расстояния.
32. Способ по п.30, дополнительно содержащий этап, на котором:
определяют группу идентификаторов соты для соты, отправляющей первую и вторую передачи основной синхронизации, на основе первого расстояния.
33. Способ по п.30, дополнительно содержащий этап, на котором:
определяют длину циклического префикса, используемую сотой,
отправляющей первую и вторую передачи основной синхронизации, на основе первого расстояния.
34. Устройство для поддержки поиска соты, содержащее:
средство приема первой передачи основной синхронизации в первом местоположении кадра;
средство приема второй передачи основной синхронизации во втором местоположении в кадре;
средство выполнения обнаружения для первой и второй передач основной синхронизации;
средство определения первого расстояния между первым и вторым местоположениями в кадре, при этом первое расстояние отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре;
средство приема только одной передачи дополнительной синхронизации в кадре, при этом дополнительную передачу принимают в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения;
средство извлечения оценки канала на основе первой передачи основной синхронизации; и
средство выполнения когерентного обнаружения передачи дополнительной синхронизации на основе оценки канала.
35. Устройство по п.34, дополнительно содержащее:
средство определения границы кадра на основе первого расстояния.
36. Машиночитаемый носитель, включающий в себя инструкции, сохраненные на нем, которые при исполнении компьютером предписывают компьютеру выполнять способ поддержки поиска соты в системе беспроводной связи, при этом инструкции содержат:
первый набор инструкций для приема первой передачи основной синхронизации в первом местоположении кадра;
второй набор инструкций для приема второй передачи основной синхронизации во втором местоположении в кадре;
третий набор инструкций для выполнения обнаружения первой и второй передач основной синхронизации; четвертый набор инструкций для определения первого расстояния между первым и вторым местоположениями в кадре, при этом первое расстояние отлично от второго расстояния между вторым местоположением в кадре и первым местоположением в следующем кадре;
пятый набор инструкций для приема только одной передачи дополнительной синхронизации в кадре, при этом дополнительную передачу принимают в третьем местоположении в кадре, при этом третье местоположение является предварительно определенным смещением от первого местоположения;
шестой набор инструкций для извлечения оценки канала на основе первой передачи основной синхронизации; и
седьмой набор инструкций для выполнения когерентного обнаружения передачи дополнительной синхронизации на основе оценки канала.
37. Машиночитаемый носитель по п.36, дополнительно содержащий:
восьмой набор инструкций для определения границы кадра на основе первого расстояния.
| Способ изготовления заменителя кожи | 1942 |
|
SU67399A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| NTT, FUJITSU, NEC, PANASONIC, TOSHIBA: "Multiplexing Method of SCH for E-Utra Downlink" 3GPP TSG RAN-WG1 MEETING #46, vol | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

