Настоящая заявка притязает на приоритет предварительной заявки на выдачу патента США №60/845268, озаглавленной "A METHOD AND APPARATUS FOR USING SCALABLE BEACON SIGNALING BASED ON SYSTEM BANDWIDTH", поданной 14 сентября 2006 года; предварительной заявки на патент США №60/828051, озаглавленной "A METHOD AND APPARATUS FOR P-SCH FOR E-UTRA", поданной 3 октября 2006 года; и заявки на патент США №11/853704, озаглавленной "BEACON ASSISTED CELL SEARCH IN A WIRELESS COMMUNICATION SYSTEM", поданной 11 сентября 2007 года, каждая из которых назначена правопреемнику этой заявки и полностью содержится в данном документе посредством ссылки.
Область техники, к которой относится изобретение
Настоящее раскрытие, в общем, относится к связи, и, более конкретно, к методикам для поиска сот в системе беспроводной связи.
Уровень техники
Системы беспроводной связи широко развернуты, чтобы предоставлять различный контент связи, например передачу речи, видео, пакетных данных, обмен сообщениями, широковещательную передачу и т.д. Эти беспроводные системы могут быть системами множественного доступа, допускающими поддержку нескольких пользователей посредством коллективного использования доступных системных ресурсов. Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы с ортогональным FDMA (OFDMA) и системы FDMA с одной несущей (SC-FDMA).
Система беспроводной связи может включать в себя любое число базовых станций, которые могут поддерживать связь для любого числа пользовательских устройств (UE). UE (к примеру, сотовый телефон) может быть в пределах покрытия нуля, одной или нескольких базовых станций в любой данный момент. UE, возможно, только что включен или, возможно, потерял покрытие и таким образом может не знать, какие базовые станции могут быть приняты. UE может выполнять поиск соты, чтобы обнаруживать базовые станции и получать синхронизацию и другую информацию для обнаруженных базовых станций. UE также может поддерживать связь с одной или более базовыми станциями и может быть мобильным устройством. UE может выполнять поиск сот, чтобы обнаруживать более оптимальные базовые станции для того, чтобы обслуживать UE.
Каждая базовая станция может передавать сигналы синхронизации, чтобы помочь UE выполнять поиск соты. В общем, сигнал синхронизации может быть любым сигналом, который дает возможность приемному устройству обнаруживать передающее устройство и получать информацию, к примеру синхронизацию и идентификационные данные, передающего устройства. Сигналы синхронизации представляют служебную информацию и должны передаваться максимально эффективно. Кроме того, сигналы синхронизации должны позволять UE выполнять поиск сот максимально быстро и эффективно.
Раскрытие изобретения
В данном документе описываются методики передачи сигналов синхронизации, чтобы помочь UE выполнять поиск сот. В одной схеме базовая станция для соты может формировать и передавать основной сигнал синхронизации и дополнительный сигнал синхронизации, которые могут использоваться посредством UE для начального поиска соты при включении питания. Базовая станция также может формировать и передавать один или более маяковых радиосигналов, которые могут использоваться посредством UE для поиска соседних сот, чтобы обнаруживать соседние соты в то время, когда UE находится в состоянии бездействия и активном состоянии. Маяковый радиосигнал - это сигнал, в котором вся или значительная часть полной мощности передачи соты используется для одной или нескольких поднесущих. Число маяковых радиосигналов для передачи и набор поднесущих, подходящих для использования для каждого маякового радиосигнала, могут быть определены на основе полосы пропускания системы. В одной схеме каждый маяковый радиосигнал может быть преобразован в одну поднесущую (которая упоминается как поднесущая маякового радиосигнала) в наборе поднесущих для каждого периода символа, в который передается маяковый радиосигнал. Поднесущая маякового радиосигнала может быть определена на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала и может зависеть от идентификатора соты (ID) и/или другой информации, отправляемой в маяковом радиосигнале. Маяковый радиосигнал(ы) может быть отправлен с использованием мультиплексирования с временным разделением каналов (TDM) или мультиплексирования с частотным разделением каналов (FDM).
В одной схеме UE может выполнять начальный поиск соты на основе основного и дополнительного сигналов синхронизации, передаваемых посредством сот в системе. UE может определять полосу пропускания системы, к примеру, на основе системной информации, принимаемой от обнаруженной соты. UE может определять набор поднесущих, подходящих для использования для маяковых радиосигналов, на основе полосы пропускания системы. При работе в состоянии бездействия или активном состоянии, UE может периодически выполнять поиск соседних сот, чтобы обнаруживать маяковые радиосигналы от соседних сот, на основе набора поднесущих.
Далее более подробно описаны различные аспекты и признаки изобретения.
Краткое описание чертежей
Фиг.1 иллюстрирует систему беспроводной связи.
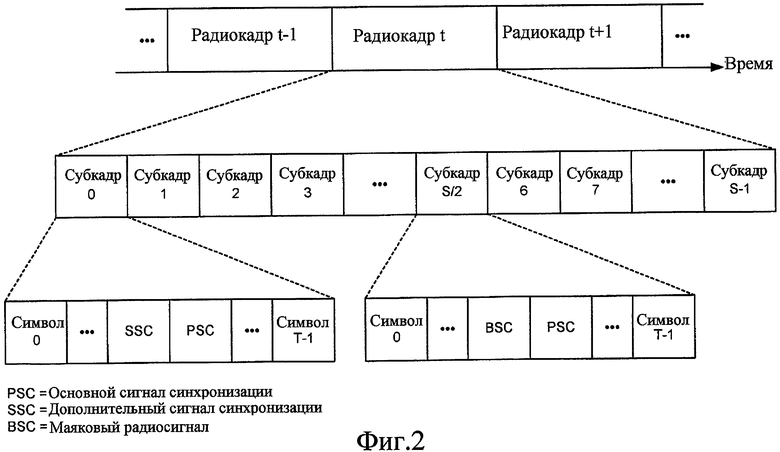
Фиг.2 иллюстрирует передачу сигналов синхронизации для схемы TDM.
Фиг.3A-3C иллюстрируют передачу маяковых радиосигналов TDM для различных полос пропускания системы.
Фиг.4 иллюстрирует передачу сигналов синхронизации для схемы FDM.
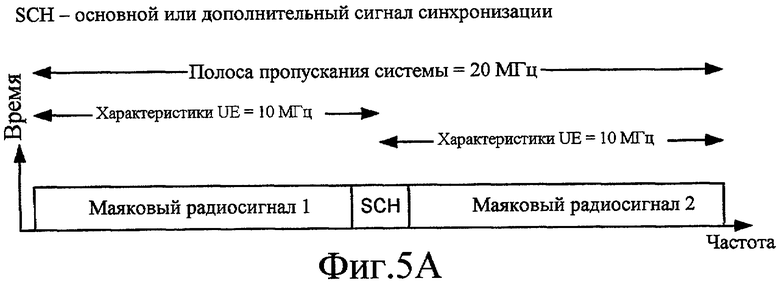
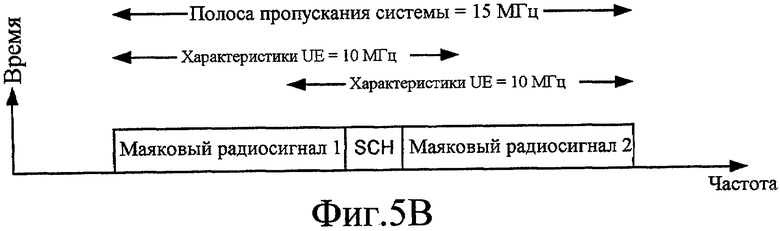
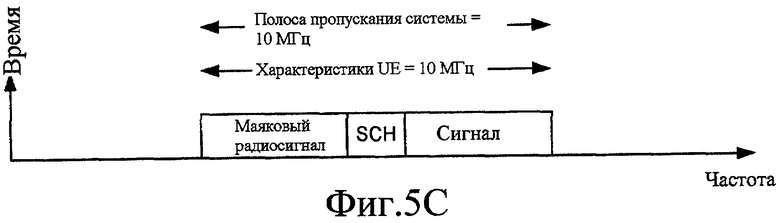
Фиг.5A-5C иллюстрируют передачу маяковых радиосигналов FDM для различных полос пропускания системы.
Фиг.6 иллюстрирует маяковый радиосигнал для одной соты.
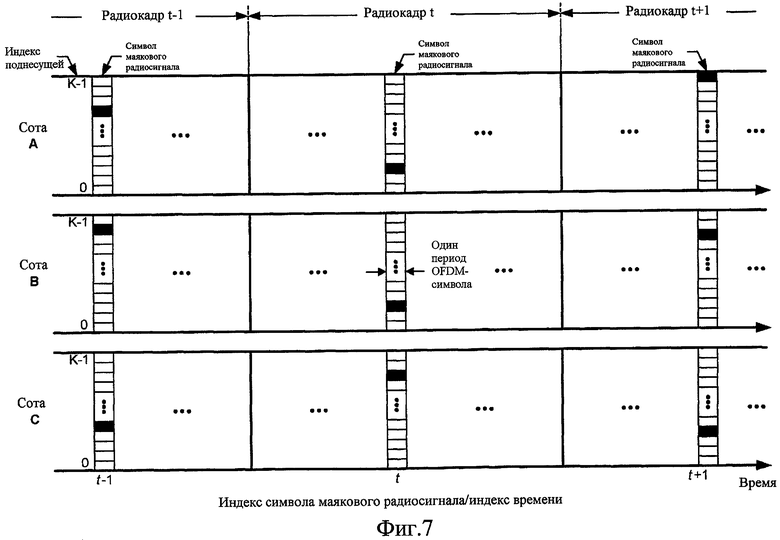
Фиг.7 иллюстрирует маяковые радиосигналы для трех сот.
Фиг.8 иллюстрирует блок-схему узла B и UE.
Фиг.9 иллюстрирует блок-схему формирователя маяковых радиосигналов в узле B.
Фиг.10 иллюстрирует блок-схему процессора маяковых радиосигналов в UE.
Фиг.11 иллюстрирует процесс передачи маяковых радиосигналов посредством узла B.
Фиг.12 иллюстрирует устройство для передачи маяковых радиосигналов.
Фиг.13 иллюстрирует процесс обнаружения маяковых радиосигналов посредством UE.
Фиг.14 иллюстрирует устройство для обнаружения маяковых радиосигналов.
Фиг.15 иллюстрирует процесс передачи сигналов синхронизации посредством узла B.
Фиг.16 иллюстрирует устройство для передачи сигналов синхронизации.
Фиг.17 иллюстрирует процесс выполнения поиска сот посредством UE.
Фиг.18 иллюстрирует устройство для выполнения поиска сот.
Фиг.19 иллюстрирует процесс передачи маяковых радиосигналов FDM посредством узла B.
Фиг.20 иллюстрирует устройство для передачи маяковых радиосигналов FDM.
Фиг.21 иллюстрирует процесс приема маяковых радиосигналов FDM посредством UE.
Фиг.22 иллюстрирует устройство для приема маяковых радиосигналов FDM.
Осуществление изобретения
Методики, описанные в данном документе, могут использоваться для различных систем беспроводной связи, таких как системы CDMA, TDMA, FDMA, OFDMA, SC-FDMA и другие системы. Термины "система" и "сеть" зачастую используются взаимозаменяемо. CDMA-система может реализовывать такую технологию радиосвязи, как универсальный наземный радиодоступ (UTRA), CDMA2000 и т.д. UTRA включает в себя широкополосную CDMA (W-CDMA) и низкую скорость передачи элементарных сигналов (LCR). CDMA2000 покрывает стандарты IS-2000, IS-95 и IS-856. TDMA-система может реализовывать такую технологию радиосвязи, как глобальная система мобильной связи (GSM). OFDMA-система может реализовывать такую технологию радиосвязи, как усовершенствованная UTRA (E-UTRA), сверхширокополосная передача для мобильных устройств (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA, E-UTRA и GSM являются частью универсальной системы мобильной связи (UMTS). Долгосрочное развитие (LTE) 3GPP является планируемой к выпуску версией UMTS, которая использует E-UTRA, которая применяет OFDMA в нисходящей линии связи и SC-FDMA в восходящей линии связи. UTRA, E-UTRA, GSM, UMTS и LTE описываются в документах организации, называемой Партнерским проектом третьего поколения (3GPP). CDMA2000 и UMB описываются в документах организации, называемой Партнерским проектом третьего поколения 2 (3GPP2). Эти различные технологии и стандарты радиосвязи известны в данной области техники. Для ясности определенные аспекты методик описываются ниже для LTE, и терминология LTE используется в большей части описания ниже.
LTE использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) в нисходящей линии связи и мультиплексирование с частотным разделением каналов на одной несущей (SC-FDM) в восходящей линии связи. OFDM и SC-FDM секционируют полосы пропускания системы на несколько (K) ортогональных поднесущих, которые также обычно упоминаются как тоны, бины и т.д. Разнесение между смежными поднесущими может быть фиксированным, и общее количество поднесущих (K) может зависеть от полосы пропускания системы. Каждая поднесущая может модулироваться данными. В общем, символы модуляции отправляются в частотной области с OFDM и во временной области с SC-FDM. Чтобы сформировать OFDM-символ, символы с ненулевыми значениями могут быть преобразованы в поднесущие, используемые для передачи, а символы с нулевыми значениями могут быть преобразованы в оставшиеся поднесущие. K символов могут быть преобразованы во временную область, чтобы получить K выборок временной области. Последние C выборок могут быть скопированы и добавлены к началу K выборок, чтобы получить OFDM-символ, содержащий K+C выборок. Скопированные выборки упоминаются как циклический префикс, а C - это длина циклического префикса.
Фиг.1 иллюстрирует систему 100 беспроводной связи с несколькими узлами B 110. Узел B - это, в общем, стационарная станция, которая обменивается данными с UE, и он также может упоминаться как усовершенствованный узел B (eNB), базовая станция, точка доступа и т.д. Каждый узел B 110 предоставляет покрытие связи для конкретной географической области. Полная зона покрытия каждого узла B 110 может быть секционирована на несколько (к примеру, три) меньших областей. В 3GPP, термин "сота" может упоминаться как наименьшая зона покрытия узла B и/или подсистема узла B, обслуживающая эту зону покрытия. В других системах термин "сектор" может упоминаться как наименьшая зона покрытия и/или подсистема, обслуживающая эту зону покрытия. Для ясности понятие соты из 3GPP используется в описании ниже.
UE 120 могут быть распределены по системе. UE может быть стационарным или мобильным и также может упоминаться как мобильная станция, терминал, терминал доступа, абонентское устройство, станция и т.д. UE может быть сотовый телефон, персональное цифровое устройство (PDA), беспроводной модем, устройство беспроводной связи, карманное устройство, дорожный компьютер, беспроводный телефон и т.д. UE может обмениваться данными с одним или более узлов B через передачи по нисходящей линии связи и восходящей линии связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от узлов B к UE, а восходящая линия связи (или обратная линия связи) относится к линии связи от UE к узлам B. На Фиг.1, сплошная линия с двойными стрелками указывает связь между узлом B и UE. Прерывистая линия с одной стрелкой указывает прием посредством UE сигнала нисходящей линии связи от узла B. UE может выполнять поиск сот на основе сигналов нисходящей линии связи, передаваемых посредством узлов B.
В системе 100, узлы B 110 могут периодически передавать сигналы синхронизации, чтобы дать возможность UE 120 обнаруживать узлы B и получать информацию, такую как синхронизация, сдвиг частоты, идентификатор соты и т.д. Таблица 1 перечисляет три типа сигналов синхронизации, которые могут быть переданы посредством узла B, и предоставляет краткое описание для каждого типа сигнала синхронизации.
Основной сигнал синхронизации может быть сформирован на основе последовательности основного кода синхронизации (PSC), отправлен по основному каналу синхронизации (P-SCH) и назван PSC-сигналом. Последовательностью PSC может быть последовательность CAZAC (нулевая автокорреляция с постоянной амплитудой), последовательность псевдослучайных чисел (PN) и т.д. Некоторые примерные последовательности CAZAC включают в себя последовательность Чу, последовательность Задова-Чу, последовательность Франка, обобщенную линейно-частотно-модулированную последовательность (GCL) и т.д. Дополнительный сигнал синхронизации может быть сформирован на основе последовательности дополнительного кода синхронизации (SSC), отправлен по дополнительному каналу синхронизации (S-SCH) и упоминаться как SSC-сигнал. Последовательность SSC может быть последовательностью максимальной длины (М-последовательностью), PN-последовательностью, двоичной последовательностью и т.д. Маяковый радиосигнал может быть сформирован на основе кода маякового радиосигнала или шаблона перескока частоты маякового радиосигнала и отправлен по каналу синхронизации маякового радиосигнала (B-SCH). Основной сигнал синхронизации, дополнительный сигнал синхронизации и маяковый радиосигнал также могут упоминаться просто как PSC, SSC и BSC соответственно. Маяковый радиосигнал также может упоминаться как сигнал синхронизации маякового радиосигнала, маяковый радиосигнал, BSC-сигнал и т.д.
PSC и SSC для E-UTRA могут быть сформированы так, как описано в 3GPP TS 36.211, озаглавленном "Physical Channels and Modulation", июнь 2007 года. PSC и SSC для UTRA могут быть сформированы так, как описано в 3GPP TS 25.213, озаглавленном "Spreading and modulation", май 2007 года. 3GPP документы являются общедоступными. PSC и SSC также могут быть сформированы другими способами, к примеру, как описано в вышеупомянутой предварительной заявке на патент США порядковый номер 60/828051. BSC может быть сформирован и передан так, как описано ниже.
BSC может быть передан с помощью TDM или FDM. Для схемы TDM, BSC может занимать всю полосу пропускания системы в каждом периоде символа, в котором передается BSC. Для схемы FDM, BSC может занимать часть полосы пропускания системы в каждом периоде символа, в котором передается BSC.
Фиг.2 иллюстрирует примерную передачу этих трех сигналов синхронизации в таблице 1 в соответствии со схемой TDM. Временная шкала передачи для нисходящей линии связи может быть секционирована в единицах радиокадров. Каждый радиокадр может быть дополнительно секционирован на несколько (S) субкадров, и каждый субкадр может включать в себя несколько (T) периодов символа. В одной схеме каждый радиокадр имеет длительность 10 миллисекунд (мс) и секционируется на S=10 субкадров, каждый субкадр имеет длительность 1 мс и секционируется на два временных кванта, а каждый временной квант охватывает 6 или 7 периодов символа в зависимости от длины циклического префикса. Радиокадры также могут быть секционированы другими способами.
В одной схеме PSC передается в последнем символе первого временного кванта в каждом из субкадров 0 и 5, которые находятся в начале и середине радиокадра. SSC передается непосредственно перед PSC в субкадре 0, а BSC передается непосредственно перед PSC в субкадре 5. В общем, PSC, SSC и BSC могут передаваться на любой скорости (к примеру, любое число раз в каждом радиокадре) и могут передаваться на одинаковой или различных скоростях. SSC может быть отправлен близко с PSC так, чтобы оценка канала могла быть извлечена на основе PSC и использована для когерентного обнаружения SSC. BSC может быть отправлен в любом известном местоположении в радиокадре.
В одной схеме все соты в системе могут передавать одну и ту же последовательность PSC, чтобы дать возможность UE обнаруживать наличие этих сот. Различные соты могут передавать различные последовательности SSC, чтобы дать возможность UE идентифицировать эти соты. Различные соты также могут передавать BSC с помощью различных шаблонов перескока частоты маякового радиосигнала, чтобы дать возможность UE идентифицировать эти соты.
UE может работать в одном из нескольких состояний, таких как отсоединенное состояние LTE, состояние бездействия LTE и активное состояние LTE. В отсоединенном состоянии LTE, UE не осуществляет доступ к системе и не известен для системы. UE может включить питание в отсоединенном состоянии LTE и после того может перейти в состояние бездействия LTE или активное состояние LTE после осуществления доступа к системе и выполнения регистрации. В состоянии бездействия LTE, UE, возможно, зарегистрировано в системе, но может бездействовать и не иметь данных, чтобы обмениваться по нисходящей линии связи или восходящей линии связи. В состоянии бездействия LTE, UE и система могут иметь применимую контекстную информацию, чтобы дать возможность UE быстро перейти в активное состояние LTE. UE может перейти в активное состояние LTE, когда есть данные для того, чтобы отправлять или принимать. В активном состоянии LTE, UE может активно обмениваться данными с системой по нисходящей линии связи и/или восходящей линии связи.
UE может выполнять начальный поиск соты, к примеру, в отсоединенном состоянии LTE при включении питания, используя трехстадийный процесс. В одной схеме, трехстадийный процесс может включать в себя следующее:
1. Стадия обнаружения PSC
a. Обнаружение сот на основе PSC, передаваемого сотами,
b. Получение символьной синхронизации для каждой обнаруженной соты, и
c. Оценка сдвига частоты и отклика канала для каждой обнаруженной соты;
2. Стадия обнаружения SSC
a. Получение кадровой синхронизации для каждой обнаруженной соты, и
b. Идентификация каждой обнаруженной соты на основе SSC, передаваемого сотой; и
3. Стадия демодуляции на широковещательном канале (BCH)
a. Получение полосы пропускания системы, длины циклического префикса и другой системной информации из BCH обнаруженной соты.
Для стадии обнаружения PSC, символьная и кадровая синхронизация могут быть неизвестными, так что UE может коррелировать принимаемый сигнал с локально формируемой последовательностью PSC при различных гипотезах синхронизации (или сдвигах во времени), чтобы обнаруживать последовательности PSC, передаваемые сотами. Для стадии обнаружения SSC, символьная синхронизация может быть известна из стадии обнаружения PSC, но может быть много гипотез SSC (к примеру, идентификаторов соты) для тестирования. UE может коррелировать принимаемый сигнал с различными возможными последовательностями SSC, чтобы обнаруживать последовательность SSC, передаваемую посредством каждой соты, обнаруженной на стадии обнаружения PSC.
После начального поиска соты одна сота может быть выбрана для того, чтобы обслуживать UE. UE может обмениваться данными с этой обслуживающей сотой в активном состоянии LTE или может ожидать вызова в этой соте в состоянии бездействия LTE.
UE может выполнять поиск соседних сот, к примеру, будучи в состоянии бездействия LTE или активном состоянии LTE, чтобы находить лучшие соты, чем текущая обслуживающая сота. Для поиска соседних сот UE уже может иметь определенную информацию, такую как полоса пропускания системы, символьная и кадровая синхронизация и длина циклического префикса. В одной схеме UE может выполнять поиск соседних сот посредством корреляции принимаемого сигнала с различными возможными последовательностями SSC тем же способом, что и для начального поиска соты. Тем не менее, непрерывный поиск соседних сот на основе корреляции может потреблять чрезмерную энергию от аккумулятора в UE. Начальный поиск соты может быть выполнен только однажды при включении питания, и высокое потребление питания аккумулятора в течение короткого промежутка времени может быть допустимым. UE может непрерывно выполнять поиск соседних сот в то время, пока оно включено. Следовательно, низкая сложность поиска может быть очень желательной для поиска соседних сот, чтобы уменьшить потребление энергии аккумулятора.
В одном аспекте, поиск соседних сот может быть выполнен на основе маяковых радиосигналов, передаваемых сотами. Маяковый радиосигнал включает в себя компоненты узкополосного сигнала с высоким уровнем мощности (к примеру, на одной или нескольких поднесущих), которые могут иметь гораздо большую мощность по сравнению с другими сигналами, такими как сигналы пользовательских данных. Маяковый радиосигнал может быть составлен из последовательности символов маякового радиосигнала. В одной схеме символ маякового радиосигнала для одного маякового радиосигнала - это OFDM-символ, в котором вся или большая часть полной мощности передачи соты используется для одной поднесущей. В других схемах символ маякового радиосигнала может иметь всю или большую часть полной мощности передачи соты на небольшом количестве поднесущих. Для ясности последующее описание приводится для схемы, в которой маяковый радиосигнал использует одну поднесущую в каждом периоде символа, в котором передается маяковый радиосигнал. Поскольку большая величина энергии передается только на одной поднесущей, маяковый радиосигнал может быть надежно обнаружен даже при низком отношении сигнал-шум (SNR).
В одной схеме, поиск соседних сот может включать в себя следующее:
1. Обнаружение маякового радиосигнала
a. Обнаружение возможных поднесущих с высоким качеством принимаемого сигнала, и
b. Идентификация соседних сот на основе возможных поднесущих.
После обнаружения соседней соты UE может измерять качество канала нисходящей линии связи для соседней соты на основе контрольного канала, передаваемого сотой. UE может сообщить о качестве канала нисходящей линии связи для всех обнаруженных соседних сот в систему, которая может принимать решения по передаче обслуживания UE на основе этого отчета.
Система может иметь конфигурируемую полосу пропускания системы, которая может быть выбрана из набора возможных полос пропускания системы. В одной схеме возможные полосы пропускания системы включают в себя 1,25, 2,5, 5, 7,5, 10, 15 и 20 МГц. Другие возможные полосы пропускания системы также могут поддерживаться. UE также может иметь различные характеристики, которые могут быть охарактеризованы посредством полос пропускания, поддерживаемых этими UE. В одной схеме предполагается, что UE поддерживает минимальную полосу пропускания в 10 МГц.
В одной схеме, число маяковых радиосигналов, чтобы передавать посредством соты, может быть конфигурируемым и определяться на основе полосы пропускания системы и характеристики полосы пропускания UE. В общем, сота может передавать достаточное число маяковых радиосигналов в пределах полосы пропускания системы так, что UE с минимальной характеристикой полосы пропускания может принимать, по меньшей мере, один маяковый радиосигнал из соты.
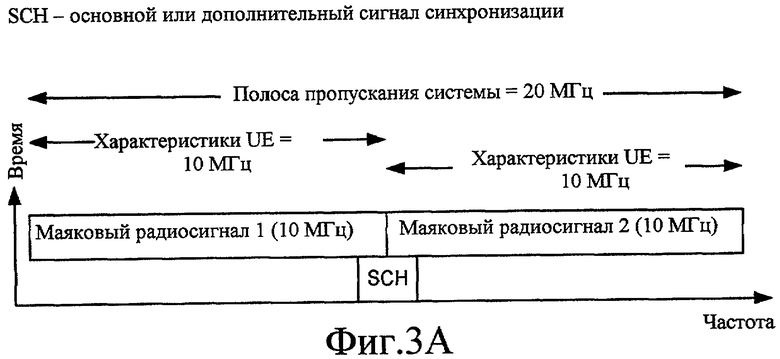
Фиг.3A иллюстрирует схему передачи маяковых радиосигналов TDM для полосы пропускания системы в 20 МГц. В этой схеме полоса пропускания системы может быть секционирована на левую половину в 10 МГц и правую половину в 10 МГц. Один маяковый радиосигнал может быть передан в левой половине, другой маяковый радиосигнал может быть передан в правой половине, и каждый маяковый радиосигнал может охватить 10 МГц. PSC и SSC могут быть переданы в центральных 1,25 МГц полосы пропускания системы. UE с поддержкой 10 МГц может работать в любой из левой или правой половины полосы пропускания системы и в таком случае имеет возможность принимать один из этих двух маяковых радиосигналов.
Фиг.3B иллюстрирует схему передачи маяковых радиосигналов TDM для полосы пропускания системы в 15 МГц. В этой схеме полоса пропускания системы может быть секционирована на левую половину в 7,5 МГц и правую половину в 7,5 МГц. Один маяковый радиосигнал может быть передан в каждой половине, и каждый маяковый радиосигнал может охватить 7,5 МГц. PSC и SSC могут быть переданы в центре полосы пропускания системы. UE с поддержкой 10 МГц может работать в левой или правой половине полосы пропускания системы.
Когда несколько маяковых радиосигналов передаются, к примеру, как показано на Фиг.3A и 3B, одинаковые или различные маяковые радиосигналы могут быть переданы на различных частях полосы пропускания системы. Тем не менее, передача одинакового маякового радиосигнала может упростить операцию.
Фиг.3C иллюстрирует схему передачи маяковых радиосигналов TDM для полосы пропускания системы в 10 МГц. В этой схеме один маяковый радиосигнал может быть передан по всей полосе пропускания системы и может охватить 10 МГц. PSC и SSC могут быть переданы в центре полосы пропускания системы. UE с поддержкой 10 МГц может работать по всей полосе пропускания системы.
Передача маяковых радиосигналов TDM для полос пропускания системы 7,5, 5, 2,5 и 1,25 МГц может быть аналогичной передаче маяковых радиосигналов TDM для полосы пропускания системы в 10 МГц. Для каждой полосы пропускания системы, которая равна или меньше чем возможности UE по полосе пропускания, один маяковый радиосигнал может быть передан по всей полосе пропускания системы.
Фиг.4 иллюстрирует примерную передачу этих трех сигналов синхронизации в таблице 1 в соответствии со схемой FDM. В одной схеме радиокадр включает в себя 10 субкадров, PSC передается в каждом из субкадров 0 и 5, а SSC передается непосредственно перед PSC. BSC может быть передан с PSC, а также с SSC, как показано на Фиг.4. Альтернативно, BSC может быть передан только с PSC или только с SSC. В общем, PSC, SSC и BSC каждый могут быть переданы на любой скорости.
Фиг.5A иллюстрирует схему передачи маяковых радиосигналов FDM для полосы пропускания системы в 20 МГц. В этой схеме полоса пропускания системы может быть секционирована на левую половину в 10 МГц и правую половину в 10 МГц. PSC и SSC могут быть переданы в центральных 1,25 МГц полосы пропускания системы. Один маяковый радиосигнал может быть передан в части левой половины, которая не занята PSC и SSC. Другой маяковый радиосигнал может быть передан в части правой половины, которая не занята PSC и SSC.
Фиг.5B иллюстрирует схему передачи маяковых радиосигналов FDM для полосы пропускания системы в 15 МГц. В этой схеме полоса пропускания системы может быть секционирована на левую половину в 7,5 МГц и правую половину в 7,5 МГц. PSC и SSC могут быть переданы в центральных 1,25 МГц полосы пропускания системы. Один маяковый радиосигнал может быть передан в каждой половине в части, которая не занята посредством PSC и SSC.
Фиг.5C иллюстрирует схему передачи маяковых радиосигналов FDM для полосы пропускания системы в 10 МГц. PSC и SSC могут быть переданы в центральных 1,25 МГц полосы пропускания системы. Один маяковый радиосигнал может быть передан в оставшейся части полосы пропускания системы, которая не занята PSC и SSC. Передача маяковых радиосигналов FDM для полос пропускания системы 7,5, 5 и 2,5 МГц может быть аналогичной передаче маяковых радиосигналов FDM для полосы пропускания системы в 10 МГц.
Как показано на Фиг.4-5C, BSC может быть мультиплексирован с частотным разделением с помощью PSC и SSC в одном OFDM-символе, когда полоса пропускания системы больше чем 1,25 МГц. Служебную информацию BSC можно исключить за счет использования FDM.
В одной схеме маякового радиосигнала FDM полная мощность передачи соты может быть разделена равномерно по всем K поднесущим. Величина мощности передачи, чтобы использовать для каждой поднесущей маякового радиосигнала, затем может быть определена на основе числа подходящих для использования поднесущих. Для полосы пропускания системы в 20 МГц, 1/8-я полной мощности передачи соты может использоваться для PSC или SSC, 7/16-х полной мощности передачи соты могут использоваться для поднесущей маякового радиосигнала слева от PSC/SSC, а оставшиеся 7/16-х полной мощности передачи соты могут использоваться для поднесущей маякового радиосигнала справа от PSC/SSC. Для полосы пропускания системы в 10 МГц, 1/4-я полной мощности передачи соты может использоваться для PSC или SSC, а оставшиеся 3/4-х полной мощности передачи соты могут использоваться для поднесущей маякового радиосигнала справа или слева от PSC/SSC. Полная мощность передачи соты также может быть выделена маяковому радиосигналу(ам) и PSC/SSC другими способами.
В схемах, показанных на Фиг.3A-3C и Фиг.5A-5C, PSC и SSC отправляются на 1,25 МГц и размещаются в центре полосы пропускания системы. Это дает возможность UE выполнять начальный поиск соты на основе PSC и SSC независимо от полосы пропускания системы. PSC и SSC также могут быть переданы другими способами, к примеру, отправлены по другой полосе пропускания и/или помещены в другие местоположения в пределах полосы пропускания системы.
После завершения начального поиска соты и выполнения других процедур, UE может быть скомандовано работать по всей или части полосы пропускания системы. Соты могут передавать маяковые радиосигналы так, что UE может обнаруживать эти соты без необходимости переключать частоту. Например, для полосы пропускания системы в 15 или 20 МГц, UE с поддержкой 10 МГц, работающее по обеим сторонам полосы пропускания системы, должно иметь возможность принимать маяковые радиосигналы от соседних сот без переключения частоты.
В одной схеме разнесение между смежными поднесущими является фиксированным при 15 кГц, и общее количество поднесущих зависит от полосы пропускания системы. Таблица 2 перечисляет набор возможных полос пропускания системы и общее количество поднесущих (K) для каждой полосы пропускания системы в соответствии с одной схемой.
Подходящая для использования поднесущая - это поднесущая, которая может использоваться для того, чтобы отправлять маяковый радиосигнал. Набор из М подходящих для использования поднесущих может быть задан на основе всего K поднесущих, где, в общем, М<K. В одной схеме все K поднесущих могут использоваться для того, чтобы отправлять одни или более маяковых радиосигналов. В других схемах поднабор K поднесущих может использоваться для того, чтобы отправлять одни или более маяковых радиосигналов.
В одной схеме число подходящих для использования поднесущих для маякового радиосигнала является масштабируемым и варьируется как функция от полосы пропускания системы. Для схемы маякового радиосигнала TDM, показанной в таблице 2, каждая третья поднесущая может использоваться для того, чтобы отправлять маяковый радиосигнал, и подходящие для использования поднесущие разнесены на 45 кГц. Для полосы пропускания системы в 10 МГц или меньше, может отправляться один маяковый радиосигнал, и число подходящих для использования поднесущих может составлять приблизительно одну третью от общего количества поднесущих, или М~K/3. Для полосы пропускания системы больше чем 10 МГц может отправляться два маяковых радиосигнала, и число подходящих для использования поднесущих для каждого маякового радиосигнала может составлять приблизительно одну шестую от общего количества поднесущих, или М~K/6. Большее число подходящих для использования поднесущих для больших полос пропускания системы может использоваться для того, чтобы поддерживать больше идентификаторов соты, уменьшать длину шаблона перескока частоты маякового радиосигнала, уменьшать время поиска соседних сот и т.д.
В другой схеме каждая вторая поднесущая может использоваться для того, чтобы отправлять маяковый радиосигнал, и подходящие для использования поднесущие разнесены на 30 кГц. Кратное целое в 32 поднесущих может быть подходящим для использования для маякового радиосигнала в зависимости от полосы пропускания системы.
В еще одной схеме число подходящих для использования поднесущих для маякового радиосигнала может быть фиксированным, и разнесение между подходящими для использования поднесущими может варьироваться как функция от полосы пропускания системы. Например, разнесение подходящих для использования поднесущих может быть 45 кГц для полосы пропускания системы в 1,25 МГц, 90 кГц для полосы пропускания системы в 2,5 МГц и т.д.
В общем, может быть задано любое число подходящих для использования поднесущих, и подходящие для использования поднесущие могут быть разнесены на любую величину. Число подходящих для использования поднесущих и разнесение подходящих для использования поднесущих может быть выбрано на основе общего количества поднесущих, требуемого минимального числа подходящих для использования поднесущих, требуемого минимального разнесения между подходящими для использования поднесущими и т.д. Одинаковое число подходящих для использования поднесущих и одинаковое разнесение могут использоваться для всех символов маякового радиосигнала. Альтернативно, число подходящих для использования поднесущих и/или разнесение могут варьироваться для различных символов маякового радиосигнала.
Фиг.6 иллюстрирует маяковый радиосигнал для одной соты в соответствии со схемой FDM. В этой схеме маяковый радиосигнал составлен из одного символа маякового радиосигнала в каждом радиокадре. В одной схеме символ маякового радиосигнала может быть отправлен в периоде символа, зарезервированном для передачи маяковых радиосигналов, к примеру, как показано на Фиг.2. В другой схеме символ маякового радиосигнала может заменять (или прореживать) другой OFDM-символ. В любом случае, символы маякового радиосигнала могут быть переданы в местоположениях, которые известны априори посредством UE.
Поднесущая маякового радиосигнала - это поднесущая, вся или большая часть мощности передачи которой используется для маякового радиосигнала. Поднесущая маякового радиосигнала может быть выбрана из набора подходящих для использования поднесущих. Как показано на Фиг.6, различные поднесущие маякового радиосигнала могут использоваться для различных символов маякового радиосигнала, и поднесущая маякового радиосигнала может варьироваться от одного символа маякового радиосигнала к следующему. В примере, показанном на Фиг.6, поднесущая X t-1 используется для символа маякового радиосигнала, переданного в радиокадре t-1, поднесущая X t используется для символа маякового радиосигнала, переданного в радиокадре t, поднесущая X t+1 используется для символа маякового радиосигнала, переданного в радиокадре t+1, и т.д.
Поскольку вся или большая часть полной мощности передачи соты может быть использована для одной поднесущей в символе маякового радиосигнала, очень высокое SNR может быть достигнуто для поднесущей маякового радиосигнала. Например, SNR поднесущей маякового радиосигнала может быть увеличено на 10 log10(75)=18,75 дБ, если одна из 75 поднесущих используется для поднесущей маякового радиосигнала при полосе пропускания системы 1,25 МГц, увеличено на 10 log10(300)=24,77 дБ, если одна из 300 поднесущих используется для поднесущей маякового радиосигнала при полосе пропускания системы 5 МГц, и т.д. Кроме того, объем служебной информации для маякового радиосигнала может быть относительно небольшим. Например, если символ маякового радиосигнала передается в одном периоде символа в каждом радиокадре из 140 периодов символа (к примеру, с 10 субкадрами/радиокадр и 14 периодами символа/субкадр), то служебная информация маякового радиосигнала составляет только 0,7%.
Фиг.7 иллюстрирует примерные передачи маяковых радиосигналов для трех сот A, B и C в соответствии со схемой FDM. В этой схеме каждая сота может передавать один символ маякового радиосигнала в одном периоде символа в каждом радиокадре, и все три соты могут передавать свои символы маякового радиосигнала в одном и том же периоде символа. Тем не менее, эти три соты могут передавать свои символы маякового радиосигнала на различных поднесущих маякового радиосигнала, которые могут быть определены на основе шаблонов перескока частоты маякового радиосигнала или кодов маякового радиосигнала для этих сот. В другой схеме различные соты могут передавать свои символы маякового радиосигнала в различных периодах символа, чтобы избежать конфликтов их поднесущих маякового радиосигнала.
В общем, любой тип информации и любой объем информации может быть отправлен в маяковом радиосигнале. Число информационных битов (L), которые могут быть отправлены в маяковом радиосигнале, может быть определено посредством числа подходящих для использования поднесущих (M) для маякового радиосигнала и числа символов маякового радиосигнала (Q), в которых информация отправляется. В качестве примера, если маяковый радиосигнал отправляется в 24 подходящих для использования поднесущих, то одно из от 242=576 возможных значений (или 9-битовое значение) может быть отправлено в двух символах маякового радиосигнала. В качестве еще одного примера, если маяковый радиосигнал отправляется в 32 подходящих для использования поднесущих, то одно из от 322=1024 возможных значений (или 10-битовое значение) может быть отправлено в двух символах маякового радиосигнала. Альтернативно, 9-битовое значение может быть отправлено с 32 подходящими для использования поднесущими (к примеру, разнесенными на 30 кГц) для одного символа маякового радиосигнала и с 16 подходящими для использования поднесущими (к примеру, разнесенными на 60 кГц) для другого символа маякового радиосигнала. В общем, до [log2 (MQ)] информационных битов может быть отправлено в маяковом радиосигнале по М подходящим для использования поднесущим в Q символах маякового радиосигнала. Информация может быть отправлена в больше, чем минимальное число (Q) символов маякового радиосигнала, чтобы повысить надежность, увеличить частотное разнесение и улучшить интенсивность ложных оповещений для данной вероятности обнаружения.
В одной схеме маяковый радиосигнал переносит идентификатор соты. Для схемы, показанной в таблице 2 с М=24 для полосы пропускания системы в 1,25 МГц, 9-битовый идентификатор соты может быть отправлен в маяковом радиосигнале в двух символах маякового радиосигнала. Маяковый радиосигнал также может переносить другую информацию.
В одной схеме каждой соте назначается конкретный для соты шаблон перескока частоты маякового радиосигнала, который указывает то, какую поднесущую использовать для поднесущей маякового радиосигнала в каждом символе маякового радиосигнала. Например, 512 различных шаблонов перескока частоты маякового радиосигнала могут быть заданы и ассоциативно связаны с 512 возможными идентификаторами соты, по одному шаблону перескока частоты маякового радиосигнала для каждого идентификатора соты. Различные наборы из 512 шаблонов перескока частоты маякового радиосигнала также могут быть заданы для различных полос пропускания системы, по одному набору для каждой полосы пропускания системы. Каждая сота может передавать свой маяковый радиосигнал с использованием шаблона перескока частоты маякового радиосигнала для своего идентификатора соты. Шаблоны перескока частоты маякового радиосигнала могут быть заданы так, что для любых двух последовательных символов маякового радиосигнала различные идентификаторы соты ассоциативно связаны с уникальными парами поднесущих маякового радиосигнала. Например, 512 идентификаторов соты могут быть ассоциативно связаны с 512 уникальными парами поднесущих маякового радиосигнала в двух последовательных символах маякового радиосигнала. Это должно дать возможность UE затем обнаруживать все соседние соты с помощью любых двух символов маякового радиосигнала.
Сотам в системе могут назначаться шаблоны перескока частоты маякового радиосигнала так, чтобы их поднесущие маякового радиосигнала не конфликтовали. Например, если есть М=24 подходящих для использования поднесущих, то до 24 различных сот могут передавать свои маяковые радиосигналы на 24 различных поднесущих в данном периоде символа. Длина шаблонов перескока частоты маякового радиосигнала может зависеть от числа подходящих для использования поднесущих и числа возможных идентификаторов соты. Большая полоса пропускания системы может предоставлять больше подходящих для использования поднесущих и предоставлять возможность использования более коротких шаблонов перескока частоты маякового радиосигнала, что позволяет уменьшить время поиска соседних сот.
Для обнаружения маякового радиосигнала UE может выполнять OFDM-демодуляцию в течение каждого периода символа, в котором отправляется символ маякового радиосигнала, и получать K принимаемых символов для всего K поднесущих. UE может определять качество принимаемого сигнала каждой поднесущей на основе принимаемого символа для этой поднесущей, сравнивать качество принимаемого сигнала каждой поднесущей с пороговым значением и сохранять возможные поднесущие с качеством принимаемого сигнала, превышающим пороговое значение. UE также может использовать принимаемую мощность и/или некоторый другой показатель для того, чтобы идентифицировать возможные поднесущие. UE может хранить список возможных поднесущих для различных символов маякового радиосигнала. UE затем может идентифицировать соседние соты на основе списка возможных поднесущих и известных конкретных для соты шаблонов перескока частоты маякового радиосигнала для всех возможных идентификаторов соты.
В другой схеме каждой соте назначается конкретный для соты код маякового радиосигнала, который указывает то, какую поднесущую использовать для поднесущей маякового радиосигнала в каждом символе маякового радиосигнала. Код маякового радиосигнала может быть максимально разнесенным (MDS) кодом, который может формировать кодовые слова, имеющие наибольшее возможное минимальное расстояние между кодовыми словами, и таким образом предоставляет наибольшую возможность исправления ошибок данной величины избыточности. Код Рида-Соломона является одним примером кода MDS. Некоторые полиномиальные коды также могут иметь определенные характеристики кода MDS.
В одной примерной схеме кода Рида-Соломона, М поднесущих используется для того, чтобы передавать маяковый радиосигнал, и им назначаются индексы от 0 до М-1, где М может зависеть от полосы пропускания системы. Символы маякового радиосигнала передаются в разное время, задаваемое посредством индекса t, где 0≤t<∞. Для символа маякового радиосигнала с индексом t, маяковый радиосигнал может быть передан на поднесущей с индексом X t, что может быть выражено следующим образом:

где p
1 - это примитивный элемент поля ZM, и p
2
=p
1 2, α
1 и α2 - это коэффициенты экспоненты, определенные на основе идентификатора соты, Z - это верхний конец диапазона для α1, а  обозначает сложение по модулю.
обозначает сложение по модулю.
Поле ZM содержит М элементов от 0 до М-1. Примитивный элемент поля ZM - это элемент ZM, который может использоваться для того, чтобы формировать все М-1 ненулевых элементов ZM. В качестве примера, для поля Z7, содержащего семь элементов от 0 до 6, 5 является примитивным элементом Z7 и может использоваться для того, чтобы сформировать все шесть ненулевых элементов Z7 следующим образом: 50 по модулю 7=1, 51 по модулю 7=5, 52 по модулю 7=4, 53 по модулю 7=6, 54 по модулю 7=2 и 55 по модулю 7=3.
В уравнении (1) арифметические операции выполняются над полем ZM. Например, суммирование A и B может быть задано как (A+B) по модулю М, умножение A на B может быть задано как (A×B) по модулю М, возведение степень B может быть задано как AB по модулю М и т.д. Суммирование в пределах экспонент является целочисленным суммированием по модулю M.
Различные коды маякового радиосигнала могут быть заданы различными значениями Z и М. Код маякового радиосигнала, показанный в уравнении (1), является периодическим с периодом в P=M/Z символов. Следовательно, X t =X t+P для любого данного t.
Коэффициенты экспоненты α1 и α2 могут быть заданы следующим образом:

Идентификатор соты (или сообщение) может быть преобразован в α1 и α2 следующим образом:

UE может восстановить идентификатор соты, отправленный в маяковом радиосигнале, с помощью двух последовательных символов маякового радиосигнала при наличии одной соты даже без информации времени. Например, UE может принимать два символа маякового радиосигнала x 1 и x 2 в моменты времени t и t+1. Принимаемые символы маякового радиосигнала могут быть выражены следующим образом:

Набор уравнений (4) может быть выражен в матричной форме следующим образом:

где p 1 Z и p 2 Z равны двум конкретным элементам поля ZM.
UE может найти члены  в уравнении (5) следующим образом:
в уравнении (5) следующим образом:

UE может получить экспоненту  следующим образом:
следующим образом:

Логарифм в уравнении (7) берется по полю ZM. Данное значение y соответствует конкретному значению z. Преобразование из y в z может быть выполнено с помощью таблицы поиска или некоторым другим способом. Коэффициент экспоненты α1 и индекс времени t могут быть получены из уравнения (7) следующим образом:
Коэффициент α2 может быть определен посредством замены t, полученного из уравнения (8b), на  , чтобы получить
, чтобы получить  , и затем нахождения α2 на основе
, и затем нахождения α2 на основе  .
.
UE также может восстановить идентификатор соты из маякового радиосигнала с помощью любых двух непоследовательных символов маякового радиосигнала при наличии одной соты. Элементы матрицы A зависят от символов маякового радиосигнала, принимаемых посредством UE. UE также может восстановить идентификаторы соты из маяковых радиосигналов, передаваемых посредством двух сот, с помощью трех последовательных символов маякового радиосигнала.
Код маякового радиосигнала, показанный в уравнении (1), может использоваться для того, чтобы формировать шаблоны перескока частоты маякового радиосигнала для всех возможных идентификаторов соты. Другие коды маякового радиосигнала также могут использоваться для маякового радиосигнала.
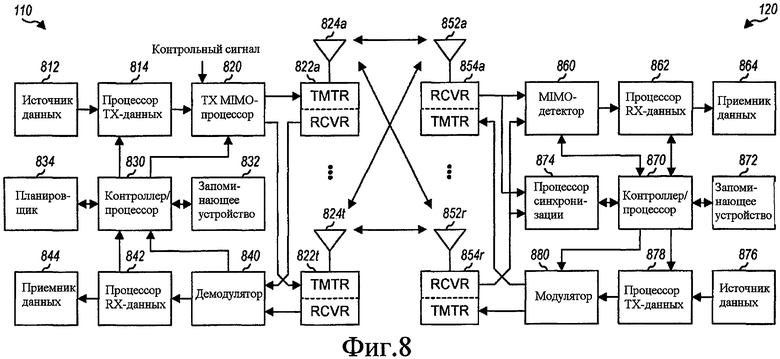
Фиг.8 иллюстрирует блок-схему структуры узла B 110 и UE 120, которые являются одним из узлов B и одним из UE на Фиг.1. В этой структуре узел B 110 оснащен T антеннами 824a-824t, а UE 120 оснащен R антеннами 852a-852r, где, в общем, T≥1 и R≥1.
В узле B 110, процессор 814 данных передачи (TX) может принимать данные трафика для одного или более UE от источника 812 данных. Процессор 814 TX-данных может обрабатывать (к примеру, форматировать, кодировать и перемежать) данные трафика для каждого UE на основе одной или более схем кодирования, выбранных для этого UE, чтобы получить кодированные данные. Процессор 814 TX-данных затем может модулировать (или выполнить символьное преобразование) кодированные данные для каждого UE на основе одной или более схем модуляции (к примеру, BPSK, QSPK, PSK или QAM), выбранных для этого UE, чтобы получить символы модуляции.
TX MIMO-процессор 820 может мультиплексировать символы модуляции для всех UE с контрольными символами, используя любую схему мультиплексирования. Контрольный сигнал - это типично известные данные, которые обрабатываются известным способом и могут использоваться приемным устройством для оценки канала и других целей. TX MIMO-процессор 820 может обрабатывать (к примеру, предварительно кодировать) мультиплексированные символы модуляции и контрольные символы и предоставлять T выходных потоков символов в T передающих устройств (TMTR) 822a-822t. В определенных схемах TX MIMO-процессор 820 может применять весовые коэффициенты формирования лучей к символам модуляции, чтобы пространственно корректировать эти символы. Каждое передающее устройство 822 может обрабатывать соответствующий выходной поток символов (к примеру, для OFDM), чтобы получить выходной поток символов шумоподобного последовательности. Каждое передающее устройство 822 может дополнительно обрабатывать (к примеру, преобразовывать в аналоговую форму, усиливать, фильтровать и преобразовывать с повышением частоты) выходной поток символов шумоподобного последовательности, чтобы получить сигнал нисходящей линии связи. T сигналов нисходящей линии связи от передающих устройств 822a-822t могут быть переданы через T антенн 824a-824t соответственно.
В UE 120, антенны 852a-852r могут принимать сигналы нисходящей линии связи от узла B 110 и предоставлять принимаемые сигналы в приемные устройства (RCVR) 854a-854r соответственно. Каждое приемное устройство 854 может приводить к требуемым параметрам (к примеру, фильтровать, усиливать, преобразовывать с понижением частоты и оцифровывать) соответствующий принимаемый сигнал, чтобы получить выборки, и может дополнительно обрабатывать выборки (к примеру, для OFDM), чтобы получить принимаемые символы. MIMO-детектор 860 может принимать и обрабатывать принимаемые символы из всех R приемных устройств 854a-854r на основе методики обработки приемного устройства MIMO, чтобы получить обнаруженные символы, которые являются оценками символов модуляции, передаваемых посредством узла B 110. Процессор 862 данных приема (RX) затем может обрабатывать (к примеру, демодулировать, выполнять обратное перемежение и декодировать) обнаруженные символы и предоставлять декодированные данные для UE 120 в приемник 864 данных. В общем, обработка посредством MIMO-детектора 860 и процессора 862 RX-данных комплементарна обработке посредством TX MIMO-процессора 820 и процессора 814 TX-данных в узле B 110.
В восходящей линии связи, в UE 120, данные трафика из источника 876 данных и служебные сигналы могут быть обработаны посредством процессора 878 TX-данных, дополнительно обработаны посредством модулятора 880, приведены к требуемым параметрам посредством передающих устройств 854a-854r и переданы в узел B 110. В узле B 110, сигналы восходящей линии связи от UE 120 могут быть приняты посредством антенн 824, приведены к требуемым параметрам посредством приемных устройств 822, демодулированы посредством демодулятора 840 и обработаны посредством процессора 842 RX-данных, чтобы получить данные трафика и служебные сигналы, передаваемые посредством UE 120.
Контроллеры/процессоры 830 и 870 могут направлять работу в узле B 110 и UE 120 соответственно. Запоминающие устройства 832 и 872 могут сохранять данные и программные коды для узла B 110 и UE 120 соответственно. Процессор 874 синхронизации (Sync) может выполнять начальный поиск соты и поиск соседних сот на основе выборок от приемных устройств 854 и может предоставлять идентификаторы соты и другую информацию для обнаруженных сот. Планировщик 834 может диспетчеризовать UE для передачи по нисходящей линии связи и/или восходящей линии связи и может предоставлять назначения ресурсов для диспетчеризуемых UE.
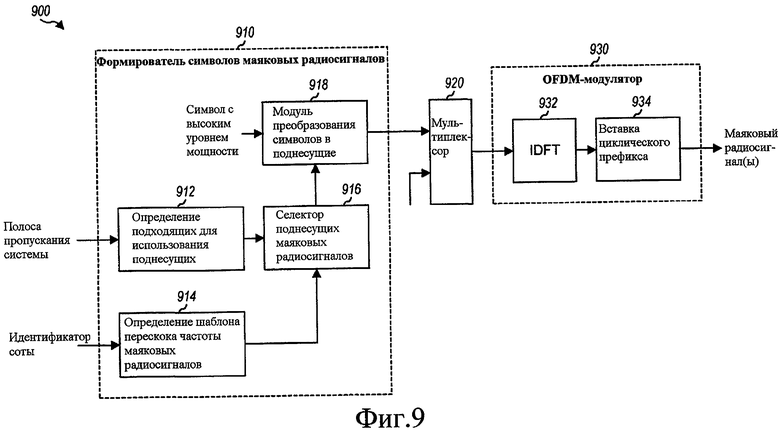
Фиг.9 иллюстрирует блок-схему структуры формирователя 900 маяковых радиосигналов, который включает в себя формирователь 910 символов маякового радиосигнала и OFDM-модулятор 930. Формирователь 910 может быть частью процессора 814 TX-данных в узле B 110, а OFDM-модулятор 930 может быть частью каждого передающего устройства 822.
В рамках формирователя 910 символов маякового радиосигнала, модуль 912 может принимать полосу пропускания системы и определять набор подходящих для использования поднесущих для маякового радиосигнала на основе полосы пропускания системы. Модуль 914 может принимать идентификатор соты и/или другую информацию и определять шаблон перескока частоты маякового радиосигнала или код маякового радиосигнала, на основе принимаемой информации. Для каждого символа маякового радиосигнала селектор 916 может выбирать поднесущую маякового радиосигнала из набора подходящих для использования поднесущих на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала. Один или несколько маяковых радиосигналов могут быть переданы в зависимости от полосы пропускания системы. Для каждого символа маякового радиосигнала модуль 918 преобразования может преобразовывать символ с высоким уровнем мощности в поднесущую маякового радиосигнала для каждого маякового радиосигнала и может преобразовывать символы с нулевыми значениями в оставшиеся поднесущие. Мультиплексор (Mux) 920 может мультиплексировать символы из формирователя 910 с другими символами для TDM или FDM.
В пределах OFDM-модулятора 930, модуль 932 обратного дискретного преобразования Фурье (IDFT) может выполнять IDFT для K символов из мультиплексора 920 в течение каждого периода символа маякового радиосигнала и предоставлять K выборок временной области. Модуль 934 вставки циклического префикса может добавлять циклический префикс к K выборкам временной области посредством копирования C последних выборок и добавления этих C выборок перед K выборками. Модуль 934 может предоставлять OFDM-символ, содержащий символ с высоким уровнем мощности на каждой поднесущей маякового радиосигнала и нулевые значения на оставшихся поднесущих, используемых для маякового радиосигнала(ов).
Фиг.10 иллюстрирует блок-схему структуры процессора 1000 маяковых радиосигналов, который включает в себя OFDM-демодулятор 1010 и детектор 1020 маяковых радиосигналов. OFDM-демодулятор 1010 может быть частью каждого приемного устройства 854 в UE 120, а детектор 1020 маяковых радиосигналов может быть частью синхронизирующего процессора 874.
В рамах демодулятора OFDM 1010, для каждого принятого OFDM-символа модуль 1012 удаления циклического префикса может удалять циклический префикс и предоставлять K принимаемых выборок. Модуль 1014 дискретного преобразования Фурье (DFT) может выполнять DFT для K принимаемых выборок и предоставлять K принимаемых символов.
В рамках детектора 1020 маяковых радиосигналов, модуль 1022 может обнаруживать возможные поднесущие в каждом символе маякового радиосигнала. В рамках модуля 1022, модуль 1024 может вычислять качество сигнала каждого принимаемого символа и предоставлять качество принимаемого сигнала соответствующей поднесущей. Компаратор 1026 может сравнивать качество принимаемого сигнала каждой поднесущей с пороговым значением и предоставлять поднесущие с качеством принимаемого сигнала, превышающим пороговое значение, в качестве возможных поднесущих. Модуль 1028 может принимать полосу пропускания системы и определять набор подходящих для использования поднесущих на основе полосы пропускания системы. Детектор 1030 шаблона маякового радиосигнала может обнаруживать идентификаторы соты на основе возможных поднесущих, набора подходящих для использования поднесущих и шаблонов перескока частоты маякового радиосигнала для всех возможных идентификаторов соты. Альтернативно, детектор 1030 может обнаруживать идентификаторы соты на основе кода маякового радиосигнала.
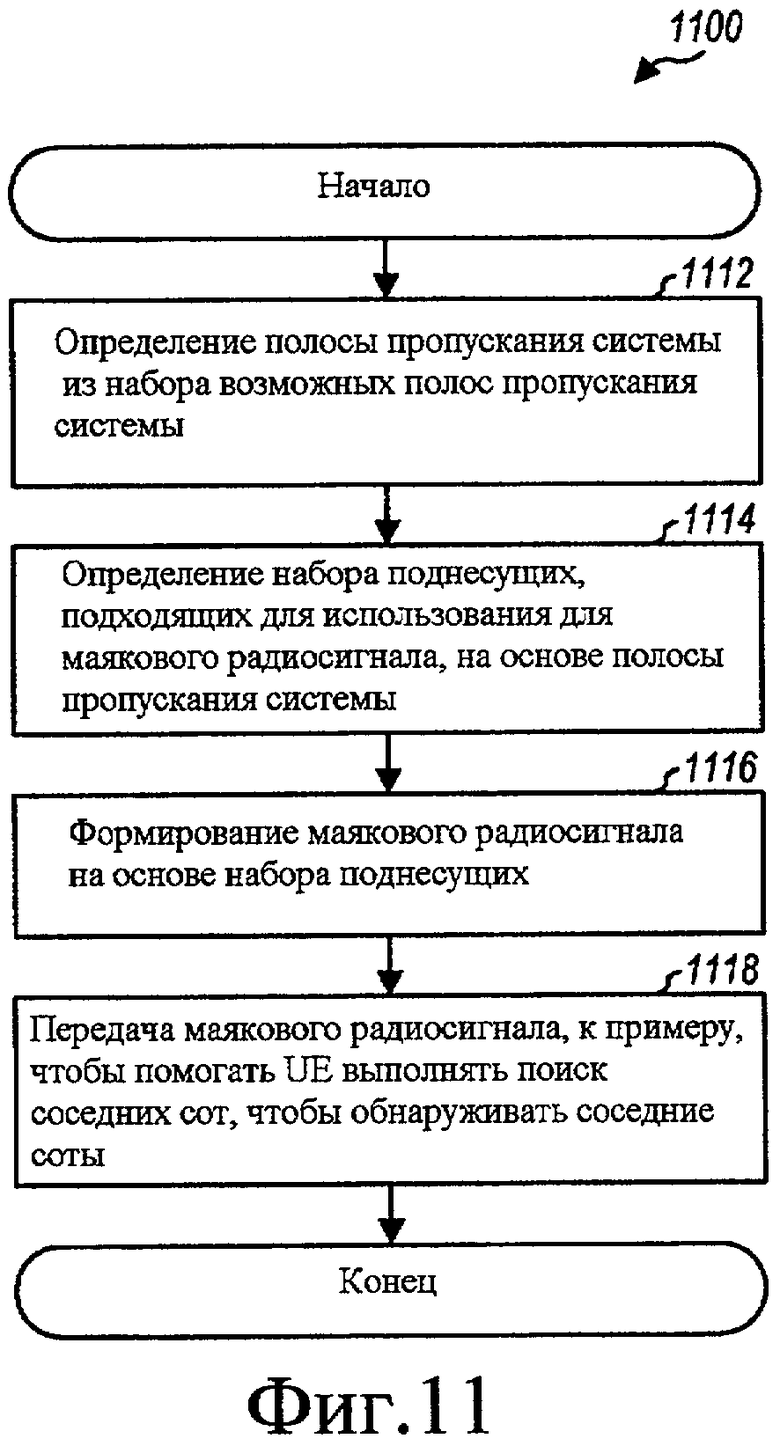
Фиг.11 иллюстрирует схему процесса 1100 передачи маяковых радиосигналов. Процесс 1100 может быть выполнен посредством передающего устройства, такого как узел B, повторитель, радиостанция и т.д. Полоса пропускания системы может быть определена из набора возможных полос пропускания системы (этап 1112). Набор поднесущих, подходящих для использования для маякового радиосигнала, может быть определен на основе полосы пропускания системы (этап 1114). Подходящие для использования поднесущие могут иметь предварительно определенное разнесение, и число подходящих для использования поднесущих может зависеть от полосы пропускания системы, к примеру, как показано в таблице 2. Альтернативно, число подходящих для использования поднесущих может быть фиксированным, и разнесение между подходящими для использования поднесущими может зависеть от полосы пропускания системы. В любом случае, маяковый радиосигнал может быть сформирован на основе набора поднесущих (этап 1116). Маяковый радиосигнал может быть передан, чтобы помогать приемным устройствам обнаруживать передающее устройство/соту, к примеру, помогать UE выполнять поиск соседних сот, чтобы обнаруживать соседние соты в то время, когда UE находится в состоянии бездействия и активном состоянии (этап 1118). Сота может соответствовать любому типу передающего устройства.
В одной схеме этапа 1116 маяковый радиосигнал может преобразовываться в одну поднесущую (или поднесущую маякового радиосигнала) в наборе поднесущих в каждом периоде символа, в котором передается маяковый радиосигнал. В одной схеме шаблон перескока частоты маякового радиосигнала может быть определен на основе идентификатора соты, и поднесущая маякового радиосигнала может быть выбрана из набора поднесущих на основе шаблона перескока частоты маякового радиосигнала. В другой схеме поднесущая маякового радиосигнала может быть выбрана из набора поднесущих на основе кода маякового радиосигнала, который может указывать то, какую поднесущую использовать для маякового радиосигнала в каждом периоде символа маякового радиосигнала. В общем, одна или более поднесущих могут быть выбраны из набора поднесущих в каждом периоде символа маякового радиосигнала на основе любой схемы.
Маяковый радиосигнал может отправляться с помощью TDM, и только маяковый радиосигнал может преобразовываться в полосу пропускания системы в каждом периоде символа маякового радиосигнала. Маяковый радиосигнал также может отправляться с помощью FDM, и маяковый радиосигнал и, по меньшей мере, один другой сигнал могут преобразовываться в различные части полосы пропускания системы в каждом периоде символа маякового радиосигнала.
Число маяковых радиосигналов для передачи может быть определено на основе полосы пропускания системы. Например, один маяковый радиосигнал может быть передан, если полоса пропускания системы равна или меньше предварительно определенного значения, и несколько маяковых радиосигналов могут быть переданы, если полоса пропускания системы больше предварительно определенного значения.
Фиг.12 иллюстрирует схему устройства 1200 для передачи маяковых радиосигналов. Устройство 1200 включает в себя средство для определения полосы пропускания системы из набора возможных полос пропускания системы (модуль 1212), средство для определения набора поднесущих, подходящих для использования для маякового радиосигнала, на основе полосы пропускания системы (модуль 1214), средство для формирования маякового радиосигнала на основе набора поднесущих (модуль 1216) и средство для передачи маякового радиосигнала, чтобы помогать UE выполнять поиск соседних сот, чтобы обнаруживать соседние соты (модуль 1218).
Фиг.13 иллюстрирует схему процесса 1300 обнаружения маяковых радиосигналов. Процесс 1300 может быть выполнен посредством приемного устройства, такого как UE и т.д. Полоса пропускания системы может быть определена из набора возможных полос пропускания системы, к примеру, на основе системной информации, принимаемой из соты, обнаруженной во время начального поиска соты (этап 1312). Набор поднесущих, подходящих для использования для маяковых радиосигналов, может быть определен на основе полосы пропускания системы (этап 1314). Маяковые радиосигналы могут быть обнаружены на основе набора поднесущих (этап 1316). Приемное устройство может периодически выполнять поиск соседних сот, чтобы обнаруживать маяковые радиосигналы от соседних сот, при этом работая в состоянии бездействия или активном состоянии.
В одной схеме этапа 1316 демодуляция может быть выполнена для каждого периода символа, в котором маяковые радиосигналы передаются, чтобы получить принимаемые символы. Возможные поднесущие с качеством принимаемого сигнала, превышающим пороговое значение, могут быть определены на основе принимаемых символов. Соты, передающие маяковые радиосигналы, могут быть идентифицированы на основе возможных поднесущих и шаблонов перескока частоты маякового радиосигнала для различных возможных идентификаторов или кода маякового радиосигнала, указывающего то, какую поднесущую использовать для маякового радиосигнала в каждом периоде символа для каждого возможного идентификатора. Обнаружение маякового радиосигнала на этапе 1316 может быть основано на маяковых радиосигналах, принимаемых из (i) всей полосы пропускания системы, если она равна или меньше предварительно определенного значения, или (ii) части полосы пропускания системы, если она больше предварительно определенного значения.
Фиг.14 иллюстрирует схему устройства 1400 для обнаружения маяковых радиосигналов. Устройство 1400 включает в себя средство для определения полосы пропускания системы из набора возможных полос пропускания системы (модуль 1412), средство для определения набора поднесущих, подходящих для использования для маяковых радиосигналов, на основе полосы пропускания системы (модуль 1414), и средство для обнаружения маяковых радиосигналов на основе набора поднесущих (модуль 1416).
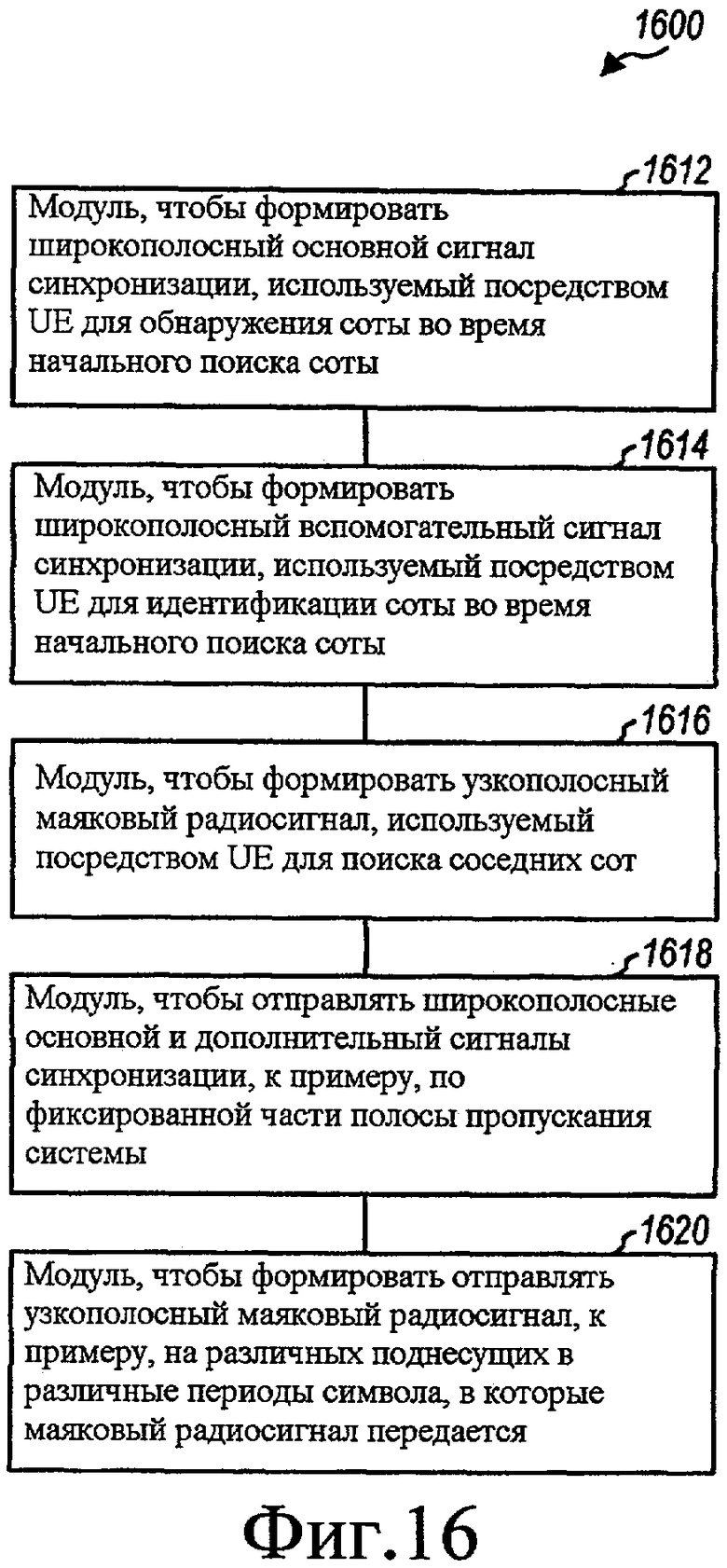
Фиг.15 иллюстрирует схему процесса 1500 для передачи сигналов синхронизации посредством узла B. Широкополосный основной сигнал синхронизации, используемый посредством UE для обнаружения соты во время начального поиска соты, может быть сформирован, к примеру, на основе последовательности PSC (этап 1512). Широкополосный дополнительный сигнал синхронизации, используемый посредством UE для идентификации соты во время начального поиска соты, также может быть сформирован, к примеру, на основе последовательности SSC или псевдослучайной последовательности для идентификатора соты (этап 1514). Узкополосный маяковый радиосигнал, используемый посредством UE для поиска соседних сот, может быть сформирован, к примеру, на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала для идентификатора соты (этап 1516). Широкополосные основной и дополнительный сигналы синхронизации могут быть отправлены, к примеру, по фиксированной части полосы пропускания системы (этап 1518). Узкополосный маяковый радиосигнал может быть отправлен, к примеру, на различных поднесущих в различные периоды символа, в которые маяковый радиосигнал передается (этап 1520).
Фиг.16 иллюстрирует схему устройства 1600 для передачи сигналов синхронизации. Устройство 1600 включает в себя средство для формирования широкополосного основного сигнала синхронизации, используемого посредством UE для обнаружения соты во время начального поиска соты (модуль 1612), средство для формирования широкополосного дополнительного сигнала синхронизации, используемого посредством UE для идентификации соты во время начального поиска соты (модуль 1614), средство для формирования узкополосного маякового радиосигнала, используемого посредством UE для поиска соседних сот (модуль 1616), средство для отправки широкополосных основного и дополнительного сигналов синхронизации, к примеру, по фиксированной части полосы пропускания системы (модуль 1618), и средство для отправки узкополосного маякового радиосигнала, к примеру, на различных поднесущих в различные периоды символа, в которые маяковый радиосигнал передается (модуль 1620).
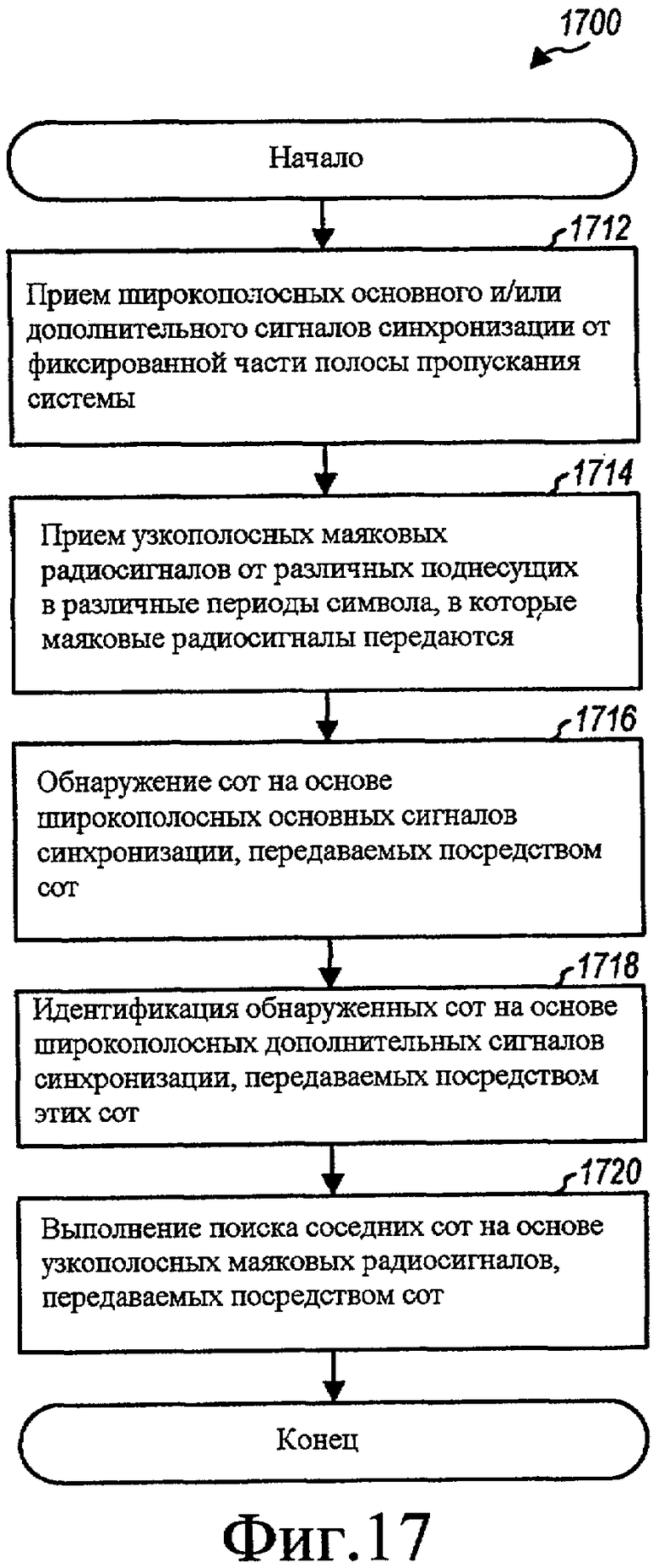
Фиг.17 иллюстрирует схему процесса 1700 выполнения поисков сот посредством UE. Широкополосные основной и/или дополнительный сигналы синхронизации могут быть приняты из фиксированной части полосы пропускания системы (этап 1712). Узкополосные маяковые радиосигналы могут быть приняты из различных поднесущих в различные периоды символа, в которые маяковые радиосигналы передаются (этап 1714). Начальный поиск соты может быть выполнен на основе широкополосных основного и дополнительного сигналов синхронизации, передаваемых посредством сот. Соты могут быть обнаружены на основе широкополосных основных сигналов синхронизации, передаваемых посредством этих сот (этап 1716). Обнаруженные соты могут быть идентифицированы на основе широкополосных дополнительных сигналов синхронизации, передаваемых посредством этих сот (этап 1718). Поиск соседних сот может быть выполнен на основе узкополосных маяковых радиосигналов, передаваемых посредством сот (этап 1720). Широкополосные дополнительные сигналы синхронизации могут быть обнаружены на основе псевдослучайных последовательностей для набора возможных идентификаторов соты. Узкополосные маяковые радиосигналы могут быть обнаружены на основе набора шаблонов перескока частоты маякового радиосигнала для набора возможных идентификаторов соты.
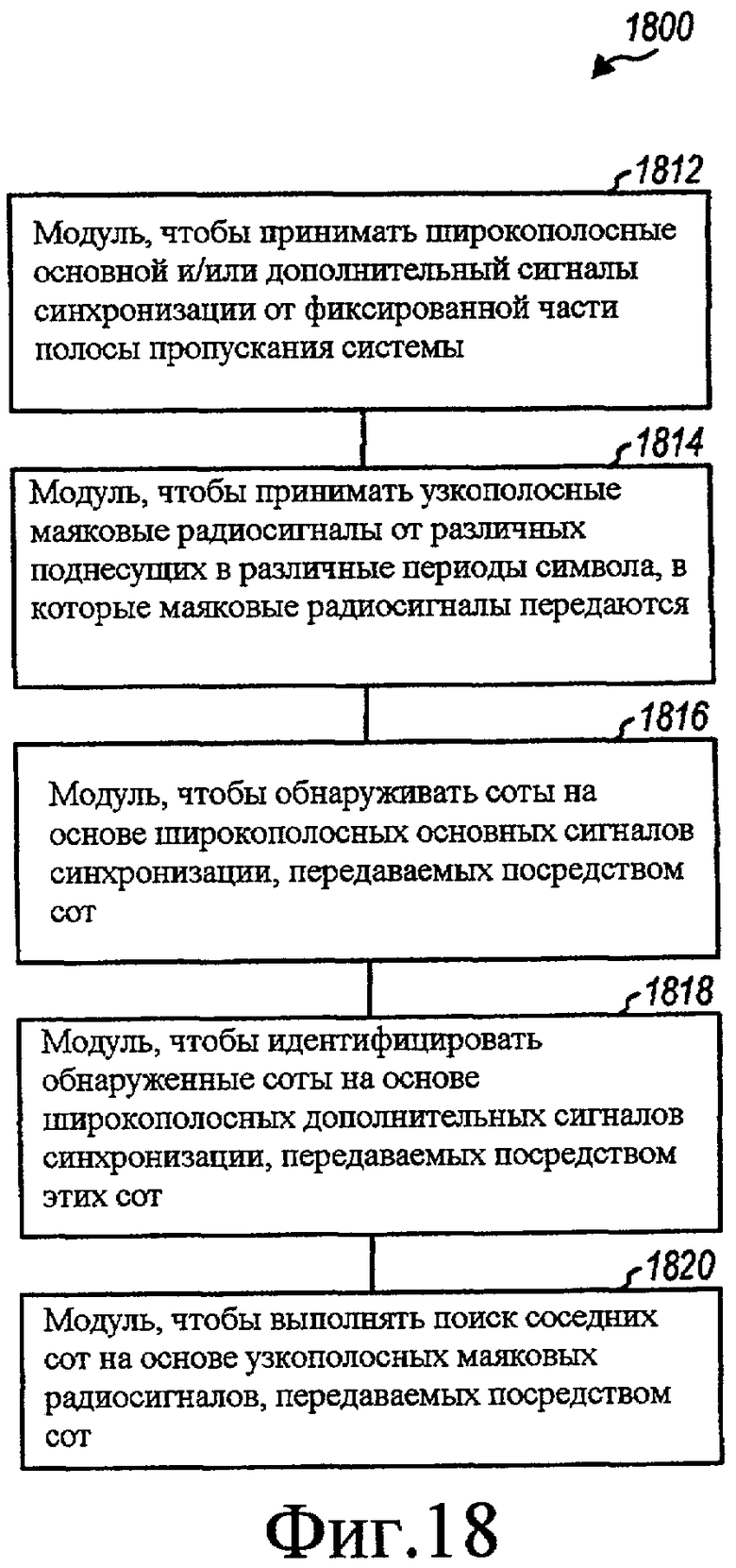
Фиг.18 иллюстрирует схему устройства 1800 выполнения поисков сот. Устройство 1800 включает в себя средство для приема широкополосных основного и/или дополнительного сигналов синхронизации от фиксированной части полосы пропускания системы (модуль 1812), средство для приема узкополосных маяковых радиосигналов из различных поднесущих в различные периоды символа, в которые маяковые радиосигналы передаются (модуль 1814), средство для обнаружения сот на основе широкополосных основных сигналов синхронизации, передаваемых посредством этих сот (модуль 1816), средство для идентификации обнаруженных сот на основе широкополосных дополнительных сигналов синхронизации, передаваемых посредством этих сот (модуль 1818), и средство для выполнения поиска соседних сот на основе узкополосных маяковых радиосигналов, передаваемых посредством сот (модуль 1820).
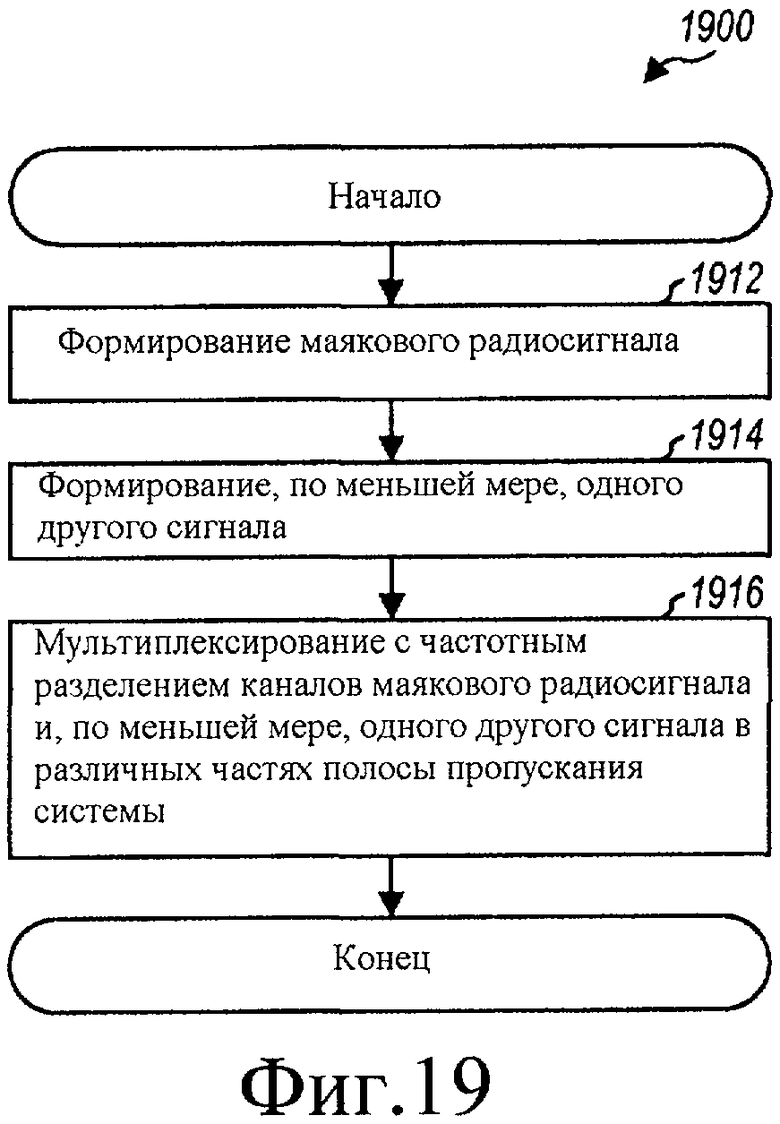
Фиг.19 иллюстрирует схему процесса 1900 для передачи маяковых радиосигналов FDM посредством узла B. Маяковый радиосигнал может быть сформирован, к примеру, на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала (этап 1912). По меньшей мере, один другой сигнал также может быть сформирован (этап 1914). Маяковый радиосигнал и, по меньшей мере, один другой сигнал могут быть мультиплексированы с частотным разделением каналов в различных частях полосы пропускания системы (этап 1916). Маяковый радиосигнал может преобразовываться в различные поднесущие в первой части полосы пропускания системы в различные периоды символа, в которых передается маяковый радиосигнал. По меньшей мере, один другой сигнал может преобразовываться во вторую часть полосы пропускания системы в периоды символа, в которых передается маяковый радиосигнал. По меньшей мере, один другой сигнал может содержать (i) основной сигнал синхронизации, используемый для обнаружения соты во время начального поиска соты, и/или (ii) дополнительный сигнал синхронизации, используемый для идентификации соты во время начального поиска соты. Полоса пропускания маякового радиосигнала может быть масштабируемой и определяемой на основе полосы пропускания системы. Мощность передачи маякового радиосигнала и мощность передачи, по меньшей мере, одного другого сигнала могут быть определены на основе частей полосы пропускания системы, используемых для этих сигналов.
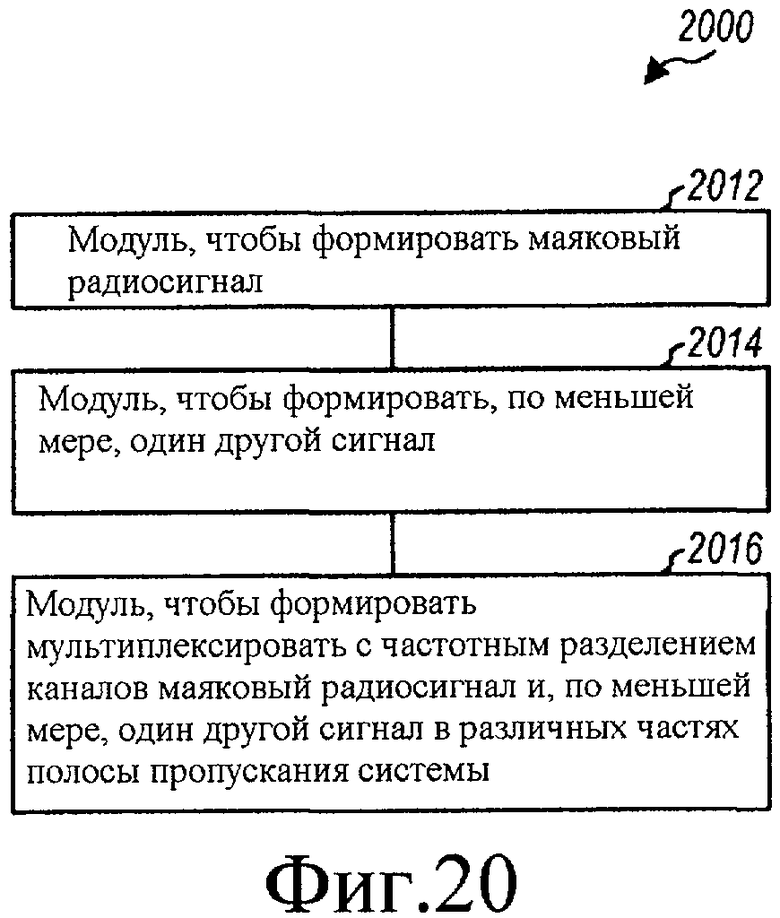
Фиг.20 иллюстрирует схему устройства 2000 для передачи маяковых радиосигналов FDM. Устройство 2000 включает в себя средство для формирования маякового радиосигнала, к примеру, на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала (модуль 2012), средство для формирования по меньшей мере, одного другого сигнала (модуль 2014) и средство для мультиплексирования с частотным разделением каналов маякового радиосигнала и, по меньшей мере, одного другого сигнала в различных частях полосы пропускания системы (модуль 2016).
Фиг.21 иллюстрирует схему процесса 2100 приема маяковых радиосигналов FDM посредством UE. Маяковые радиосигналы могут быть приняты из первой части полосы пропускания системы (этап 2112). Другие сигналы могут быть приняты из второй части полосы пропускания системы (этап 2114). Маяковые радиосигналы и другие сигналы могут быть мультиплексированы с частотным разделением каналов. Другие сигналы могут содержать (i) основные сигналы синхронизации, используемые для обнаружения соты во время начального поиска соты, и/или (ii) дополнительные сигналы синхронизации, используемые для идентификации соты во время начального поиска соты.
Фиг.22 иллюстрирует схему устройства 2200 приема маяковых радиосигналов FDM. Устройство 2200 включает в себя средство для приема маяковых радиосигналов от первой части полосы пропускания системы (модуль 2212) и средство для приема других сигналов от второй части полосы пропускания системы, при этом маяковые радиосигналы и другие сигналы мультиплексируются с частотным разделением каналов (модуль 2214).
Модули на Фиг.12, 14, 16, 18, 20 и 22 могут содержать процессоры, электронные устройства, аппаратные устройства, электронные компоненты, логические схемы, запоминающие устройства и т.д., либо любую комбинацию вышеозначенного.
Специалисты в данной области техники должны понимать, что информация и сигналы могут быть представлены с помощью любой из множества различных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и символы шумоподобной последовательности, которые могут приводиться в качестве примера по всему описанию выше, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами либо любой комбинацией вышеозначенного.
Специалисты в данной области техники дополнительно должны принимать во внимание, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытием сущности, могут быть реализованы как электронные аппаратные средства, вычислительное программное обеспечение либо их комбинации. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы описаны выше, в общем, на основе их функциональности. Реализована эта функциональность в качестве аппаратных средств или программного обеспечения, зависит от конкретного варианта применения и структурных ограничений, накладываемых на систему в целом. Высококвалифицированные специалисты могут реализовать описанную функциональность различными способами для каждого конкретного варианта применения, но такие решения по реализации не должны быть интерпретированы как являющиеся отступлением от объема настоящего раскрытия сущности.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытием сущности в данном документе, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем матричной БИС (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных компонентов аппаратных средств либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте, процессором может быть любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как комбинация вычислительных устройств, к примеру, сочетание DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Этапы способа или алгоритма, описанные в связи с раскрытием сущности в данном документе, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение посредством процессора, либо в комбинации вышеозначенного. Программный модуль может постоянно размещаться в RAM, флэш-памяти, ROM, памяти типа EPROM, памяти типа EEPROM, регистрах, на жестком диске, сменном диске, компакт-диске или любой другой форме носителя хранения данных, известной в данной области техники. Типичный носитель хранения данных соединяется с процессором, причем процессор может считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте носитель хранения данных может быть встроен в процессор. Процессор и носитель хранения данных могут постоянно размещаться в ASIC. ASIC может постоянно размещаться в пользовательском терминале. В альтернативном варианте процессор и носитель хранения данных могут постоянно размещаться как дискретные компоненты в пользовательском терминале.
В одной или более примерных схем описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммном обеспечении или любой комбинации вышеозначенного. Если реализованы в программном обеспечении, функции могут быть сохранены или переданы как одна или более инструкций или код на машиночитаемом носителе. Машиночитаемые носители включают в себя как компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы из одного места в другое. Носители хранения данных могут быть любыми доступными носителями, к которым можно осуществлять доступ посредством компьютера общего назначения или специального назначения. В качестве примера, а не ограничения, эти машиночитаемые носители могут содержать RAM, ROM, EEPROM, CD-ROM или другое устройство хранения на оптических дисках, устройство хранения на магнитных дисках или другие магнитные устройства хранения, либо любой другой носитель, который может быть использован для того, чтобы переносить или сохранять требуемое средство для программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера общего назначения или специального назначения или процессора общего назначения или специального назначения. Так же, любое подключение корректно называть машиночитаемым носителем. Например, если программное обеспечение передается с веб-узла, сервера или другого удаленного источника с помощью коаксиального кабеля, оптоволоконного кабеля, "витой пары", цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радиопередающие и микроволновые среды, то коаксиальный кабель, оптоволоконный кабель, "витая пара", DSL или беспроводные технологии, такие как инфракрасные, радиопередающие и микроволновые среды, включены в определение носителя. Диск (disk) и диск (disc) при использовании в данном документе включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск Blu-Ray, при этом диски (disk) обычно воспроизводят данные магнитно, тогда как диски (disc) обычно воспроизводят данные оптически с помощью лазеров. Комбинации вышеперечисленного также следует включить в число машиночитаемых носителей.
Предшествующее описание раскрытия сущности предоставлено для того, чтобы дать возможность любому специалисту в данной области техники создавать или использовать раскрытие сущности. Различные модификации в изобретении должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам без отступления от духа и области применения изобретения. Таким образом, изобретение не предназначено для того, чтобы быть ограниченным описанными в данном документе примерами и схемами, а должно удовлетворять самой широкой области применения, согласованной с принципами и новыми функциями, раскрытыми в данном документе.











Изобретение относится к технике связи и может использоваться для передачи сигналов синхронизации, чтобы помогать абонентским устройствам (UE) выполнять поиски сот. Технический результат состоит в повышении эффективности передачи сигналов синхронизации. Для этого базовая станция для соты формирует и передает основной сигнал синхронизации и дополнительный сигнал синхронизации, которые могут использоваться посредством UE для начального поиска соты при включении питания. Базовая станция также может формировать и передавать один или более маяковых радиосигналов, которые могут использоваться посредством UE для поиска соседних сот, чтобы обнаруживать соседние соты. Число маяковых радиосигналов для передачи и набор поднесущих, подходящих для использования для каждого маякового радиосигнала, могут быть определены на основе полосы пропускания системы. Каждый маяковый радиосигнал может преобразовываться в одну поднесущую из набора поднесущих в каждом периоде символа маякового радиосигнала. Эта поднесущая может быть определена на основе шаблона перескока частоты маякового радиосигнала или кода маякового радиосигнала и может зависеть от идентификатора соты (ID). 12 н. и 42 з.п. ф-лы, 26 ил., 2 табл.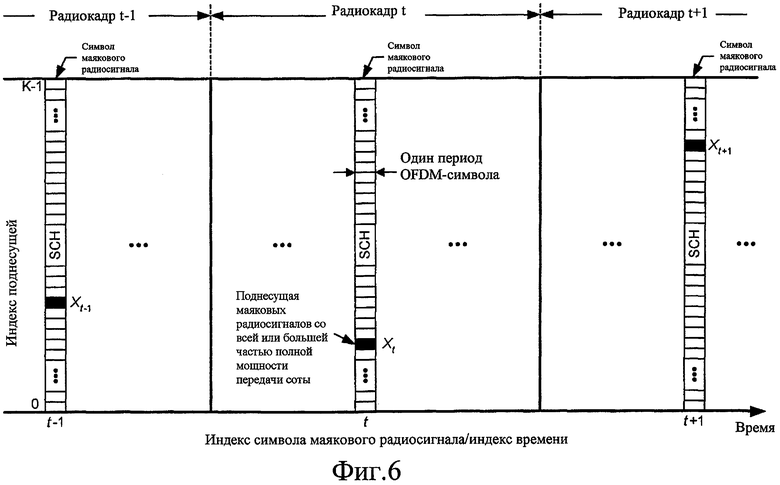
1. Устройство беспроводной связи, содержащее: по меньшей мере один процессор, выполненный с возможностью определять полосу пропускания системы из набора возможных полос пропускания системы, определять набор поднесущих, применимых для маякового радиосигнала, на основании полосы пропускания системы и формировать маяковый радиосигнал на основании набора поднесущих; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью преобразовывать маяковый радиосигнал в одну поднесущую из набора поднесущих в каждом периоде символа, в котором передается маяковый радиосигнал.
3. Устройство по п.2, в котором, по меньшей мере, один процессор выполнен с возможностью определять шаблон для скачкообразной перестройки частоты маякового радиосигнала на основании идентификатора (ID) соты и выбирать одну поднесущую из набора поднесущих на основании упомянутого шаблона для скачкообразной перестройки частоты маякового радиосигнала.
4. Устройство по п.2, в котором, по меньшей мере, один процессор выполнен с возможностью выбирать одну поднесущую из набора поднесущих на основании кода маякового радиосигнала, указывающего, какую поднесущую использовать для маякового радиосигнала в каждом периоде символа, в котором передается маяковый радиосигнал.
5. Устройство по п.1, в котором поднесущие, применимые для маякового радиосигнала, имеют предварительно определенное разнесение, причем число поднесущих, применимых для маякового радиосигнала, является переменным и определяется на основании полосы пропускания системы.
6. Устройство по п.1, в котором число поднесущих, применимых для маякового радиосигнала, является фиксированным, причем поднесущие, применимые для маякового радиосигнала, имеют переменное разнесение, определяемое на основании полосы пропускания системы.
7. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью определять число маяковых радиосигналов для передачи на основании полосы пропускания системы.
8. Устройство по п.1, в котором, по меньшей мере, один процессор выполнен с возможностью формировать один маяковый радиосигнал, если полоса пропускания системы равна или меньше предварительно определенного значения, и формировать множество маяковых радиосигналов, если полоса пропускания системы больше предварительно определенного значения.
9. Способ беспроводной связи, содержащий этапы, на которых: определяют полосу пропускания системы из набора возможных полос пропускания системы; определяют набор поднесущих, применимых для маякового радиосигнала, на основании полосы пропускания системы и формируют маяковый радиосигнал на основании набора поднесущих.
10. Способ по п.9, в котором формирование маякового радиосигнала заключается в том, что преобразуют маяковый радиосигнал в одну поднесущую из набора поднесущих в каждом периоде символа, в котором передают маяковый радиосигнал.
11. Способ по п.10, в котором формирование маякового радиосигнала дополнительно содержит этапы, на которых: определяют шаблон для скачкообразной перестройки частоты маякового радиосигнала на основании идентификатора (ID) соты и выбирают одну поднесущую из набора поднесущих на основании упомянутого шаблона для скачкообразной перестройки частоты маякового радиосигнала.
12. Способ по п.9, дополнительно содержащий этап, на котором определяют число маяковых радиосигналов для передачи на основании полосы пропускания системы.
13. Устройство беспроводной связи, содержащее: средство для определения полосы пропускания системы из набора возможных полос пропускания системы; средство для определения набора поднесущих, применимых для маякового радиосигнала, на основании полосы пропускания системы и средство для формирования маякового радиосигнала на основании набора поднесущих.
14. Устройство по п.13, в котором средство для формирования маякового радиосигнала содержит средство для преобразования маякового радиосигнала в одну поднесущую из набора поднесущих в каждом периоде символа, в котором передается маяковый радиосигнал.
15. Устройство по п.14, в котором средство для формирования маякового радиосигнала дополнительно содержит: средство для определения шаблона для скачкообразной перестройки частоты маякового радиосигнала на основании идентификатора (IP) соты и средство для выбора одной поднесущей из набора поднесущих на основании упомянутого шаблона для скачкообразной перестройки частоты маякового радиосигнала.
16. Машиночитаемый носитель, содержащий инструкции, которые, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, включающие в себя: определение полосы пропускания системы из набора возможных полос пропускания системы; определение набора поднесущих, применимых для маякового радиосигнала, на основании полосы пропускания системы и формирование маякового радиосигнала на основании набора поднесущих.
17. Машиночитаемый носитель по п.16, в котором инструкции, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, дополнительно включающие в себя: отображение маякового радиосигнала в одну поднесущую из набора поднесущих в каждом периоде символа, в котором передается маяковый радиосигнал.
18. Машиночитаемый носитель по п.17, в котором инструкции, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, дополнительно включающие в себя: определение шаблона для скачкообразной перестройки частоты маякового радиосигнала на основании идентификатора (ID) соты и выбор одной поднесущей из набора поднесущих на основании упомянутого шаблона для скачкообразной перестройки частоты маякового радиосигнала.
19. Устройство беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью определять полосу пропускания системы из набора возможных полос пропускания системы, определять набор поднесущих, применимых для маяковых радиосигналов, на основании полосы пропускания системы и обнаруживать маяковые радиосигналы на основании набора поднесущих; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
20. Устройство по п.19, в котором, по меньшей мере, один процессор выполнен с возможностью осуществлять демодуляцию в течение каждого периода символа, в котором маяковые радиосигналы передаются, чтобы получать принимаемые символы, определять возможные поднесущие с качеством принимаемого сигнала, превышающим порог, на основании принимаемых символов и идентифицировать соты, передающие маяковые радиосигналы, на основании возможных поднесущих.
21. Устройство по п.20, в котором, по меньшей мере, один процессор выполнен с возможностью идентифицировать соты, передающие маяковые радиосигналы, дополнительно на основании шаблонов для скачкообразной перестройки частоты маякового радиосигнала для различных возможных идентификаторов (ID) соты.
22. Устройство по п.20, в котором, по меньшей мере, один процессор выполнен с возможностью идентифицировать соты, передающие маяковые радиосигналы, дополнительно на основании кода маякового радиосигнала, указывающего, какую поднесущую использовать для маякового радиосигнала в каждом периоде символа для каждого возможного идентификатора (ID) соты.
23. Устройство по п.19, в котором, по меньшей мере, один процессор выполнен с возможностью обнаруживать маяковые радиосигналы, принимаемые из всей полосы пропускания системы, если полоса пропускания системы равна или меньше предварительно определенного значения, и обнаруживать маяковые радиосигналы, принимаемые из части полосы пропускания системы, если полоса пропускания системы больше предварительно определенного значения.
24. Устройство по п.19, в котором, по меньшей мере, один процессор выполнен с возможностью осуществлять начальный поиск соты на основании сигналов синхронизации, передаваемых посредством сот, и определять полосу пропускания системы на основании системной информации, принимаемой от соты, обнаруженной в результате начального поиска соты.
25. Устройство по п.19, в котором, по меньшей мере, один процессор выполнен с возможностью периодически осуществлять поиск соседних сот, находясь в состоянии бездействия или активном состоянии, чтобы обнаруживать маяковые радиосигналы от соседних сот.
26. Способ беспроводной связи, содержащий этапы, на которых: определяют полосу пропускания системы из набора возможных полос пропускания системы; определяют набор поднесущих, применимых для маяковых радиосигналов, на основании полосы пропускания системы и обнаруживают маяковые радиосигналы на основании набора поднесущих.
27. Способ по п.26, в котором обнаружение маяковых радиосигналов заключается в том, что: выполняют демодуляцию в течение каждого периода символа, в котором передают маяковые радиосигналы, чтобы получить принимаемые символы, определяют возможные поднесущие с качеством принимаемого сигнала, превышающим пороговое значение, на основании принимаемых символов и идентифицируют соты, передающие маяковые радиосигналы, на основании возможных поднесущих.
28. Способ по п.27, в котором обнаружение маяковых радиосигналов дополнительно заключается в том, что идентифицируют соты, передающие маяковые радиосигналы, дополнительно на основании шаблонов для скачкообразной перестройки частоты маякового радиосигнала для различных возможных идентификаторов (ID) соты.
29. Способ по п.26, в котором обнаружение маяковых радиосигналов заключается в том, что обнаруживают маяковые радиосигналы, принимаемые из всей полосы пропускания системы, если полоса пропускания системы равна или меньше предварительно определенного значения, и обнаруживают маяковые радиосигналы, принимаемые из части полосы пропускания системы, если полоса пропускания системы больше предварительно определенного значения.
30. Устройство беспроводной связи, содержащее: средство для определения полосы пропускания системы из набора возможных полос пропускания системы; средство для определения набора поднесущих, применимых для маяковых радиосигналов, на основании полосы пропускания системы и средство для обнаружения маяковых радиосигналов на основании набора поднесущих.
31. Устройство по п.30, в котором средство для обнаружения маяковых радиосигналов содержит: средство для выполнения демодуляции в течение каждого периода символа, в котором маяковые радиосигналы передаются, чтобы получить принимаемые символы,
средство для определения возможных поднесущих с качеством принимаемого сигнала, превышающим пороговое значение, на основании принимаемых символов и средство для идентификации сот, передающих маяковые радиосигналы, на основании возможных поднесущих.
32. Устройство по п.31, в котором средство для обнаружения маяковых радиосигналов дополнительно содержит средство для идентификации сот, передающих маяковые радиосигналы, дополнительно на основании шаблонов для скачкообразной перестройки частоты маякового радиосигнала для различных возможных идентификаторов (ID) соты.
33. Машиночитаемый носитель, содержащий инструкции, которые, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, включающие в себя: определение полосы пропускания системы из набора возможных полос пропускания системы; определение набора поднесущих, применимых для маяковых радиосигналов, на основании полосы пропускания системы и обнаружение маяковых радиосигналов на основании набора поднесущих.
34. Машиночитаемый носитель по п.33, в котором инструкции, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, дополнительно включающие в себя: выполнение демодуляции в течение каждого периода символа, в котором маяковые радиосигналы передаются, чтобы получить принимаемые символы; определение возможных поднесущих с качеством принимаемого сигнала, превышающим пороговое значение, на основании принимаемых символов и идентификацию сот, передающих маяковые радиосигналы, на основании возможных поднесущих.
35. Машиночитаемый носитель по п.34, в котором инструкции, при выполнении посредством машины, побуждают упомянутую машину выполнять операции, дополнительно включающие в себя: идентификацию сот, передающих маяковые радиосигналы, дополнительно на основании шаблонов для скачкообразной перестройки частоты маякового радиосигнала для различных возможных идентификаторов (ID) соты.
36. Устройство беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью формировать широкополосный сигнал синхронизации, используемый посредством абонентских устройств (UE) для начального поиска соты, формировать узкополосный маяковый радиосигнал, используемый посредством UE для поиска соседних сот, и отправлять широкополосный сигнал синхронизации и узкополосный маяковый радиосигнал; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
37. Устройство по п.36, в котором, по меньшей мере, один процессор выполнен с возможностью отображать широкополосный сигнал синхронизации в фиксированную часть полосы пропускания системы, а узкополосный маяковый радиосигнал - в различные поднесущие в различные периоды символа, в которые передается узкополосный маяковый радиосигнал.
38. Устройство по п.36, в котором широкополосный сигнал синхронизации содержит дополнительный сигнал синхронизации и в котором, по меньшей мере, один процессор выполнен с возможностью формировать дополнительный сигнал синхронизации на основании псевдослучайной последовательности для идентификатора (ID) соты и формировать узкополосный маяковый радиосигнал на основании шаблона для скачкообразной перестройки частоты маякового радиосигнала для ID соты.
39. Устройство по п.36, в котором широкополосный сигнал синхронизации содержит основной сигнал синхронизации, используемый посредством UE для обнаружения соты во время начального поиска соты.
40. Устройство беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью осуществлять начальный поиск соты на основании широкополосных сигналов синхронизации, передаваемых посредством сот в системе беспроводной связи, и осуществлять поиск соседних сот на основании узкополосных маяковых радиосигналов, передаваемых посредством сот; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
41. Устройство по п.40, в котором, по меньшей мере, один процессор выполнен с возможностью принимать широкополосные сигналы синхронизации из фиксированной части полосы пропускания системы и узкополосные маяковые радиосигналы из различных поднесущих в различные периоды символа, в которые передаются узкополосные маяковые радиосигналы.
42. Устройство по п.40, в котором широкополосные сигналы синхронизации содержат дополнительные сигналы синхронизации и в котором, по меньшей мере, один процессор выполнен с возможностью обнаруживать дополнительные сигналы синхронизации на основании псевдослучайных последовательностей для набора возможных идентификаторов (ID) соты и узкополосные маяковые радиосигналы на основании набора шаблонов для скачкообразной перестройки частоты маякового радиосигнала для набора возможных ID соты.
43. Устройство по п.40, в котором широкополосные сигналы синхронизации содержат основные сигналы синхронизации и в котором, по меньшей мере, один процессор выполнен с возможностью обнаруживать соты во время начального поиска соты на основании основных сигналов синхронизации, передаваемых посредством сот.
44. Устройство беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью формировать маяковый радиосигнал, формировать, по меньшей мере, один сигнал синхронизации и мультиплексировать с частотным разделением каналов маяковый радиосигнал и, по меньшей мере, один сигнал синхронизации в различных частях полосы пропускания системы; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
45. Устройство по п.44, в котором, по меньшей мере, один сигнал синхронизации содержит дополнительный сигнал синхронизации, используемый для начального поиска соты.
46. Устройство по п.44, в котором, по меньшей мере, один сигнал синхронизации содержит основной сигнал синхронизации, используемый для обнаружения соты во время начального поиска соты.
47. Устройство по п.44, в котором, по меньшей мере, один процессор выполнен с возможностью преобразовывать маяковый радиосигнал в различные поднесущие в первой части полосы пропускания системы в различные периоды символа, в которые передается маяковый радиосигнал, и, по меньшей мере, один сигнал синхронизации во вторую часть полосы пропускания системы в периоды символа, в которые передается маяковый радиосигнал.
48. Устройство по п.47, в котором, по меньшей мере, один процессор выполнен с возможностью определять первую часть полной мощности передачи с целью использования для маякового радиосигнала на основании первой части полосы пропускания системы и вторую часть полной мощности передачи с целью использования, по меньшей мере, для одного сигнала синхронизации на основании второй части полосы пропускания системы.
49. Устройство по п.44, в котором, по меньшей мере, один процессор выполнен с возможностью определять полосу пропускания системы из набора возможных полос пропускания системы и полосу пропускания маякового радиосигнала на основании полосы пропускания системы.
50. Устройство беспроводной связи, содержащее: по меньшей мере, один процессор, выполненный с возможностью принимать маяковые радиосигналы из первой части полосы пропускания системы и сигналы синхронизации из второй части полосы пропускания системы, при этом маяковые радиосигналы и сигналы синхронизации мультиплексированы с частотным разделением; и запоминающее устройство, соединенное, по меньшей мере, с одним процессором.
51. Устройство по п.50, в котором сигналы синхронизации содержат дополнительные сигналы синхронизации и в котором, по меньшей мере, один процессор выполнен с возможностью выполнять начальный поиск соты на основании дополнительных сигналов синхронизации и выполнять поиск соседних сот на основании маяковых радиосигналов.
52. Устройство по п.50, в котором сигналы синхронизации содержат основные сигналы синхронизации и в котором, по меньшей мере, один процессор выполнен с возможностью обнаруживать соты во время начального поиска соты на основании основных сигналов синхронизации и выполнять поиск соседних сот на основании маяковых радиосигналов.
53. Устройство по п.50, в котором, по меньшей мере, один процессор выполнен с возможностью принимать маяковые радиосигналы из различных поднесущих в первой части полосы пропускания системы в различные периоды символа, в которые передаются маяковые радиосигналы, и принимать сигналы синхронизации из второй части полосы пропускания системы в периоды символа, в которые передаются маяковые радиосигналы.
54. Устройство по п.50, в котором, по меньшей мере, один процессор выполнен с возможностью определять полосу пропускания системы из набора возможных полос пропускания системы и полосу пропускания маяковых радиосигналов на основании полосы пропускания системы.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ДЕКОДИРОВАНИЯ ОДНОГО ПОЛУЧЕННОГО ТЕКУЩЕГО СИГНАЛА ИЗ СЕРИИ ДВУХКАНАЛЬНЫХ КОДИРОВАННЫХ ВИДЕОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2120702C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

