Группа изобретений относится к области сельского хозяйства, а именно к особым средствам повышенной проходимости для комплексного возделывания и уборки сельскохозяйственных культур.
Наиболее близкими к настоящему изобретению по основным существенным признакам являются известные разработки агромостов: патент РФ №2055457 С1, 10.03.1996; патент РФ №2262219 С2, 20.10.2005, а также «Устройство перемещения транспортного средства» (патент РФ №2189330 С2, 20.09.2002).
Основная проблема мостового земледелия - преодоление порога практической реализуемости агромостов по критерию эффективности (результаты в расчете на единицу затрат энергии и ресурсов).
Задачей данной группы изобретений является обеспечение обусловленного повышения эффективности комплексного возделывания и уборки сельскохозяйственных культур.
Решение задачи основано на реализации конкурентных преимуществ (технических решений) предложенных агромодулей.
Задача решается тем, что в первом варианте агромодуль для комплексного возделывания и уборки сельскохозяйственных культур содержит опорную тележку с продольным ферменным лонжероном и поперечными балками, на которых установлены бесприводные колеса, и две несущие полурамы, предназначенные для работы с навесным агротехнологическим оборудованием. Несущие полурамы размещены на обеих сторонах лонжерона вдоль продольной оси тележки с возможностью перемещения вдоль продольного лонжерона во взаимно противоположных направлениях, и выполнены с возможностью обеспечения движения посредством замкнутого цепного привода, натянутого на две звездочки, к каждой ветви которого прикреплена упомянутая несущая полурама, а в середине наружных сторон полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорных лыж и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки. Агромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого цепного привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода.
Во втором варианте задача решается тем, что агромодуль для комплексного возделывания и уборки сельскохозяйственных культур содержит две несущие полурамы на опорных бесприводных колесах, предназначенные для работы с навесным агротехнологическим оборудованием, соединенные друг с другом вдоль образуемой ими продольной оси посредством направляющих рельс и опорных катков с возможностью возвратно-поступательного перемещения относительно друг друга. По внешним углам каждой из полурам установлено по два опорных бесприводных колеса, при этом для возвратно-поступательного перемещения несущих полурам относительно друг друга каждая из них снабжена тросовым приводом, состоящим из двух тяговых электрических лебедок с тросом, каждая из которых установлена на несущей полураме, а ее трос закреплен на смежной несущей полураме. В середине наружных сторон несущих полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорной лыжи и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки. Агромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого тросового привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода.
В частном варианте агромодулей грунтозацепы на лыжах могут быть выполнены в виде забуриваемых анкеров с собственными приводами вращения и заглубления.
Новизна изобретения состоит в том, что упорядоченное перемещение агромодулей по полю (пошаговое перемещение по занимаемой полосе прохода, осевое (циркулярное) перемещение при очередной смене полосы прохода и прочие перемещения) осуществляется при помощи цепных или тросовых приводов и специальной системы фиксации рабочего (упорного) положения несущих полурам в виде заглубляемых грунтозацепов. При работе агромодулей на влажных почвах и косогорах грунтозацепов в виде штырей может оказаться недостаточно, поэтому вместо них возможно применение заглубляемых анкерных буров, снабженных собственными приводами вращения и заглубления. Устойчивость перемещения и необходимая маневренность агромодулей обеспечиваются, во-первых, за счет согласованного (систематизированного) взаимодействия функциональных полурам друг с другом в качестве упорной или перемещаемой полурамы, а во-вторых, за счет способности агромодулей забуривать с внешней стороны той или иной полурамы анкерный бур и разворачиваться вокруг него на 180° при помощи специального привода. Реализуемый по данному изобретению метод перемещения позволяет обеспечивать надежное, энергоэффективное функционирование агромодулей практически при любых погодных условиях (при любой несущей способности грунта), не допуская при этом чрезмерного давления на почву, образования колеи, рысканья, заносов и каких-либо иных отклонений от заданного пути движения. Устойчивость перемещения по полю объективно является важнейшим условием надежной автоматизации подобных процессов. То есть заявленные агромодули определенно способны осуществлять эффективное функционирование в автоматическом (автоматизированном) режиме в любых допустимых условиях и обеспечивать при этом надежную реализацию оптимальных схем маршрутизации упорядоченного перемещения в пределах любого конкретного поля. Способность агромодулей обеспечивать надежное функционирование в условиях повышенной влажности почвы позволяет программировать на этой основе последовательное повышение устойчивости и продуктивности растениеводства. Внедрение агромодулей предусматривает также целенаправленное обеспечение эффективного решения всего комплекса задач, связанных с глубоким рыхлением почвы и почвоуглублением, на основе применения адаптивного электрического плуга. Функциональные возможности агромодулей позволяют осуществлять производство указанных работ в так называемом антистрессовом технологическом режиме (планомерно, с учетом жесткой сезонно-временной регламентации растениеводства). Кардинальное увеличение глубины и степени разрыхления почвы и функция маршрутизации упорядоченного перемещения агромодулей по полю позволяют прогнозировать достаточно длительные сроки наступления технологически обусловленной необходимости повторного выполнения подобных работ в рамках конкретного поля.
Пошаговое поступательное перемещение агромодулей по занимаемой полосе прохода осуществляется следующим образом.
Упорная полурама фиксируется в рабочем положении (при помощи заглубляемых грунтозацепов или анкерных буров) и сразу же после этого включает в работу соответствующее навесное агротехнологическое оборудование (приступает к выполнению необходимых (задаваемых) агротехнических операций). Одновременно с этим включается соответствующий привод и начинается перемещение другой (предварительно разблокированной) полурамы вдоль занимаемой ею полосы прохода на расстояние, равное длине рабочего шага полурамы (рабочей длине полурамы, обеспечивающей таким образом пошаговую непрерывность обработки соответствующей полосы прохода (выполняемых агротехнических операций)). Ширина полосы прохода полурамы равна половине ширины полосы прохода агромодуля. Завершив указанное перемещение, данная полурама фиксируется в рабочем положении (при помощи заглубляемых грунтозацепов или анкерных буров) и сразу же после этого включает в работу соответствующее навесное агротехнологическое оборудование и т.д.
На фиг.1 показан план поля, по которому пошагово перемещается агромодуль, реализующий изложенный алгоритм.
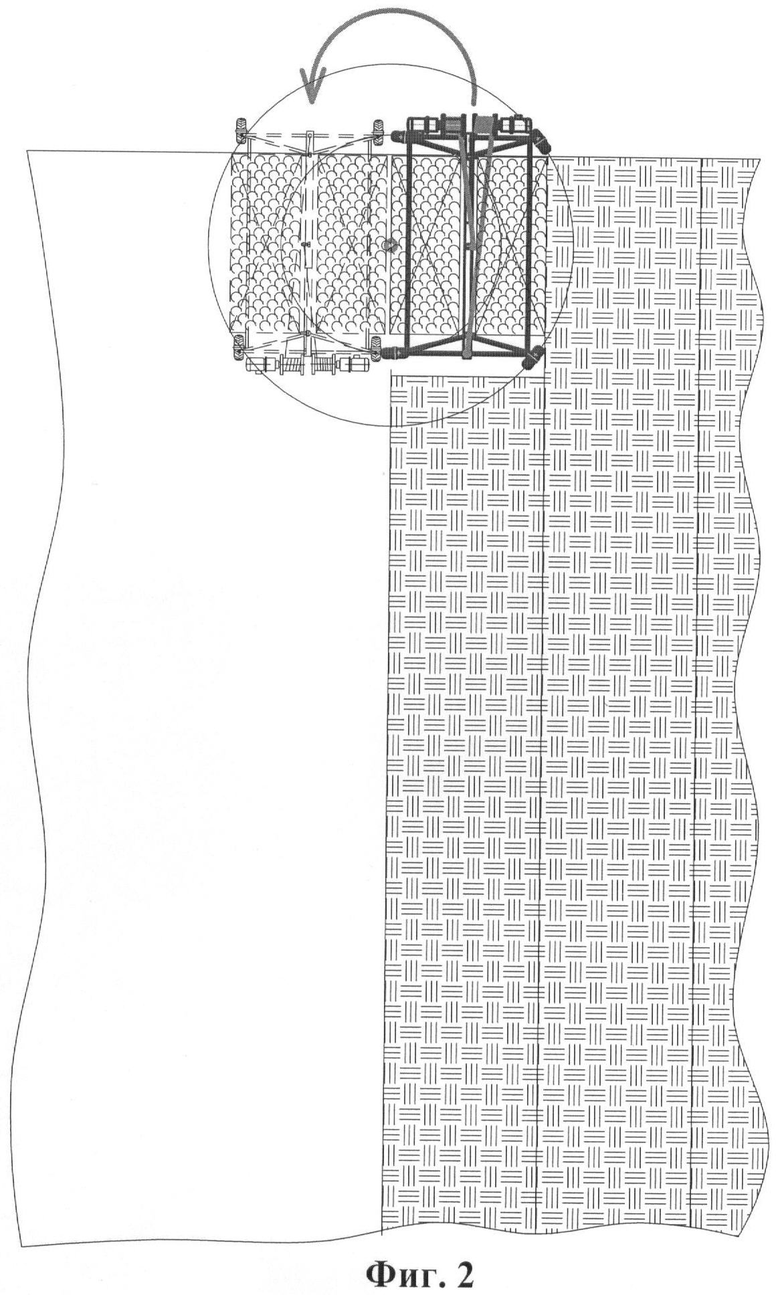
Дойдя до края поля, фиг.2, агромодуль опускает с соответствующего борта анкер, заглубляемый в землю, и специальным приводом разворачивается вокруг него на 180°. Затем он продолжает пошаговое поступательное перемещение по смежной полосе прохода в обратном направлении, реализуя при этом изложенный ранее алгоритм.
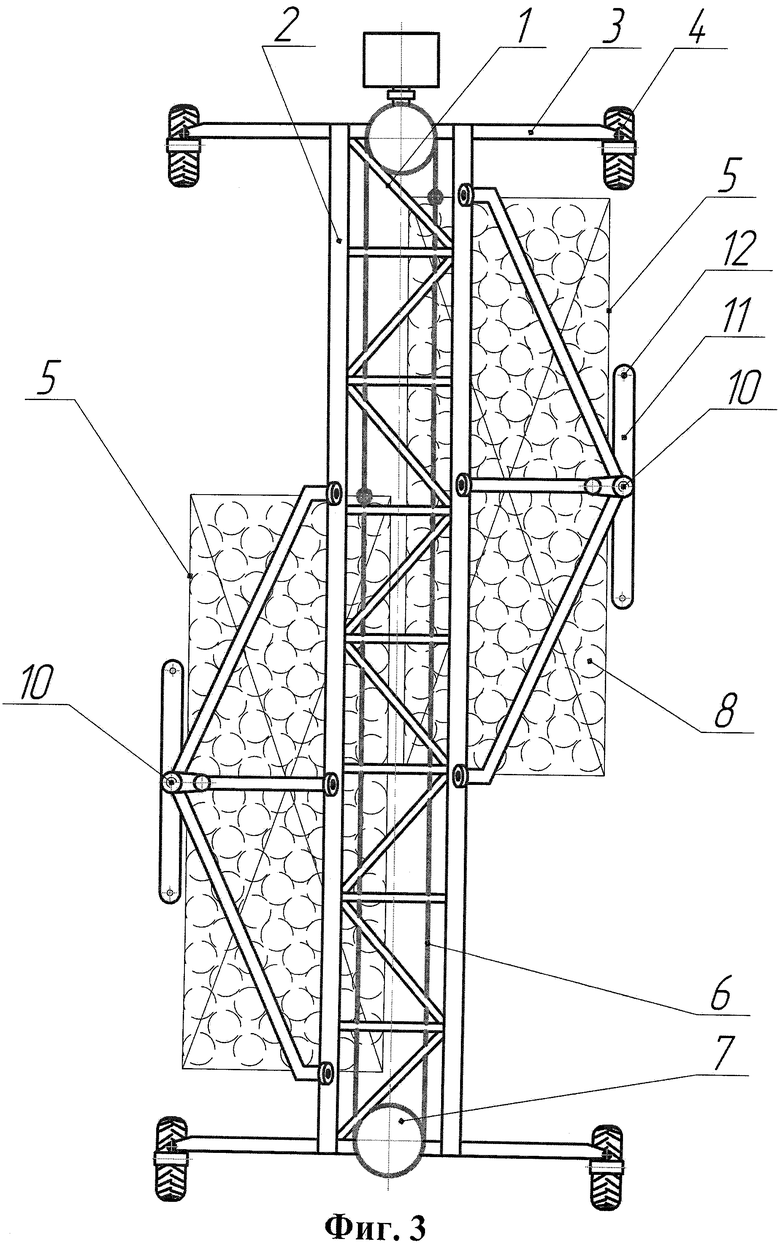
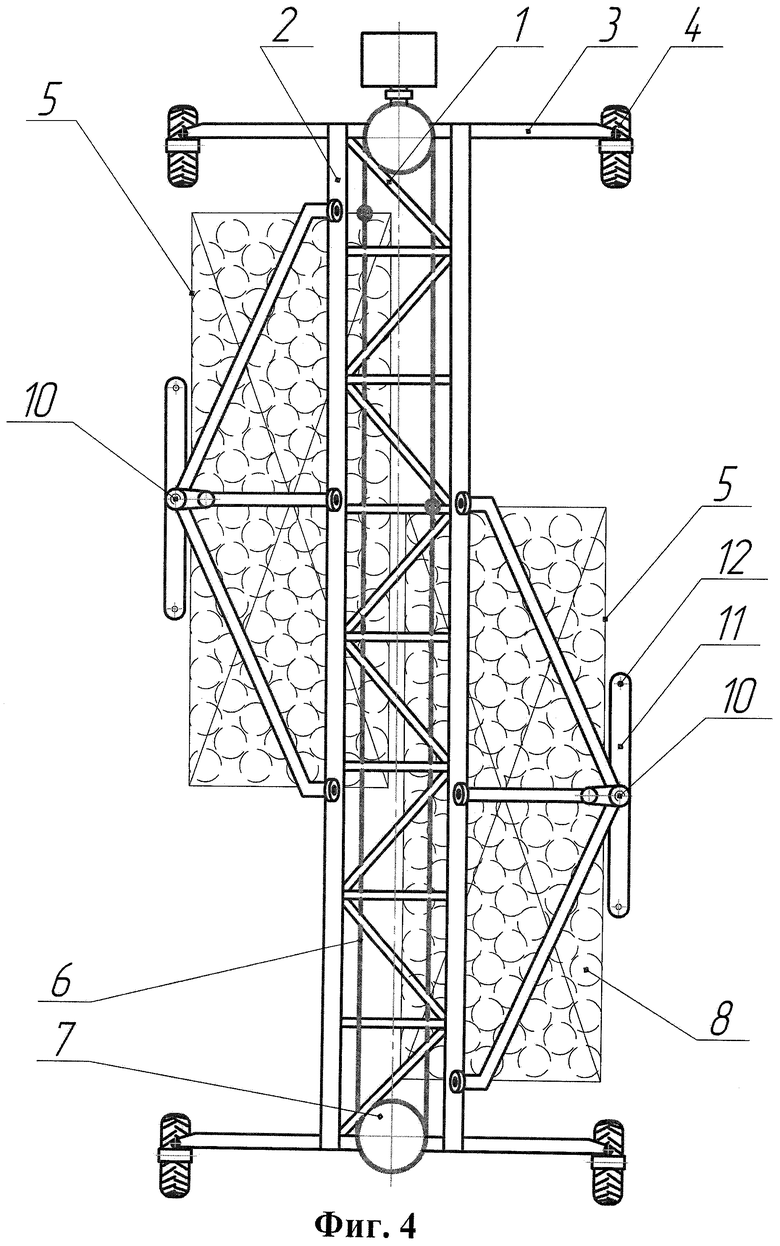
На фиг.3, 4 изображен агромодуль в плане до и после совершения шагового перемещения.
Агромодуль состоит из опорной тележки 1 с продольным форменным лонжероном 2 и поперечными балками 3, на которых установлены бесприводные колеса 4. На лонжероне 2 с обеих сторон от продольной оси тележки размещены две несущие полурамы 5 с возможностью перемещения своими опорными катками вдоль продольного лонжерона 2 во взаимно противоположных направлениях.
Движение несущих полурам обеспечивается приводом, исполнительным элементом которого является замкнутая цепь 6, натянутая на две звездочки 7, к каждой ветви которой прикреплена несущая полурама 5.
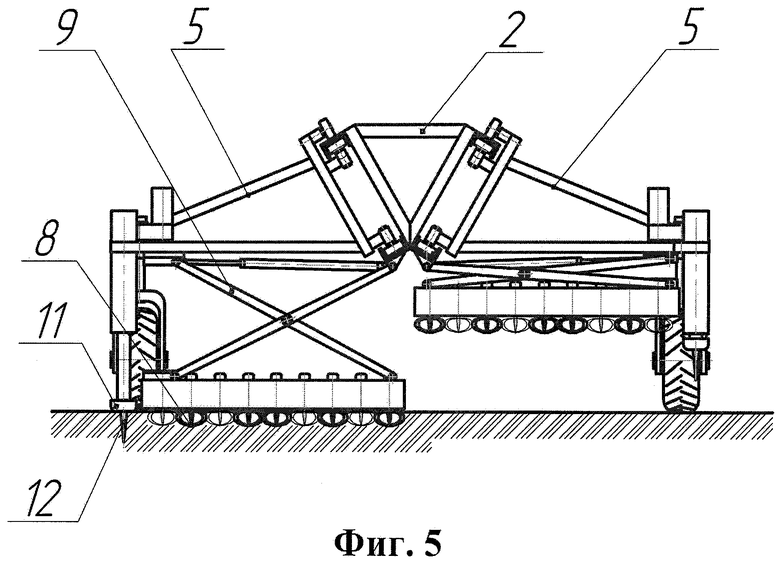
На несущих полурамах условно показан адаптивный электрический плуг с рабочими органами 8 на вертикальных валах, снабженный механизмами вертикального перемещения 9 (фиг.5) для обеспечения комплексной обработки почвы с учетом задаваемой глубины и степени ее разрыхления.
На фиг.5 изображено поперечное сечение агромодуля в положении, когда он производит обработку почвы левой полурамой, при этом опущен на землю и левый анкер с опорной лыжей 11 и заглубленными в землю грунтозацепами 12.
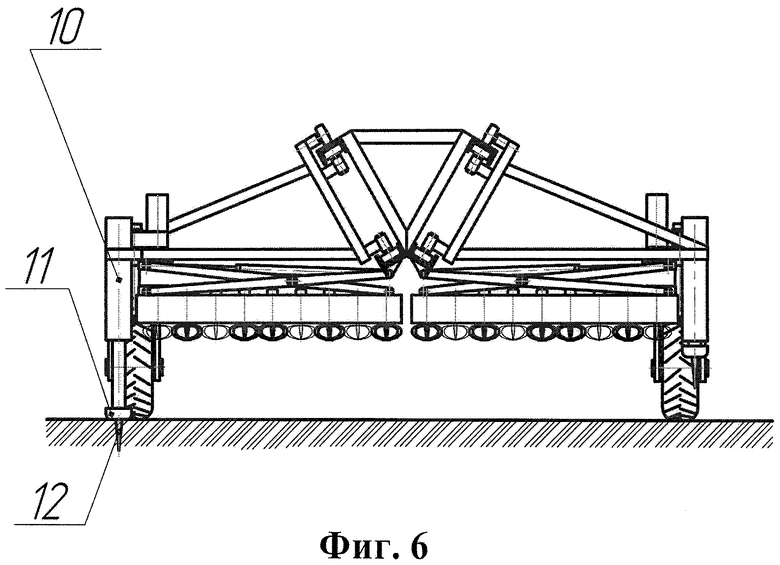
На фиг.6 изображено поперечное сечение агромодуля, когда обе несущие полурамы подняты, но опущен анкер 10 с той стороны, где находится очередная смежная полоса прохода, подлежащая обработке. Далее, как уже частично отмечалось, агромодуль разворачивается вокруг анкера 10 на 180° при помощи специального привода, выходит на смежную полосу прохода и приступает к ее обработке.
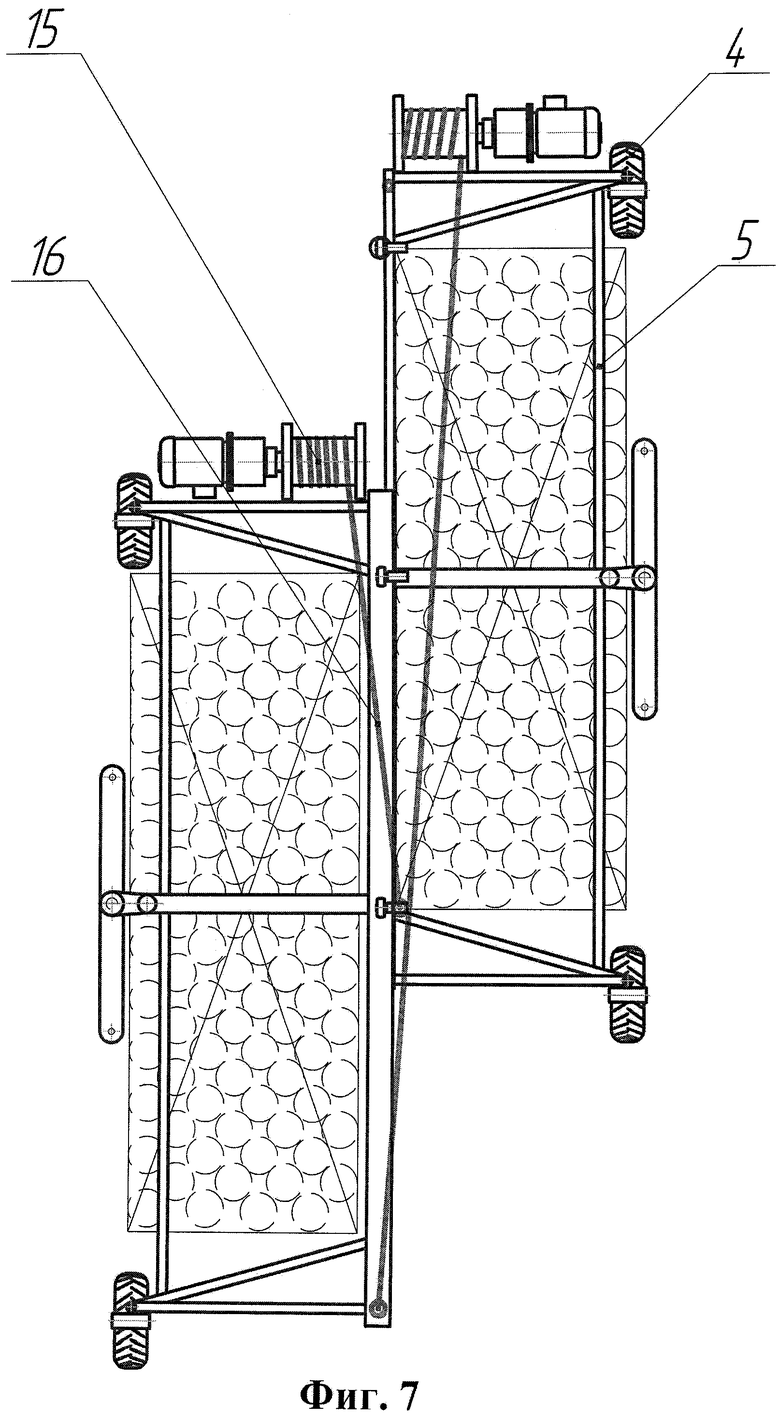
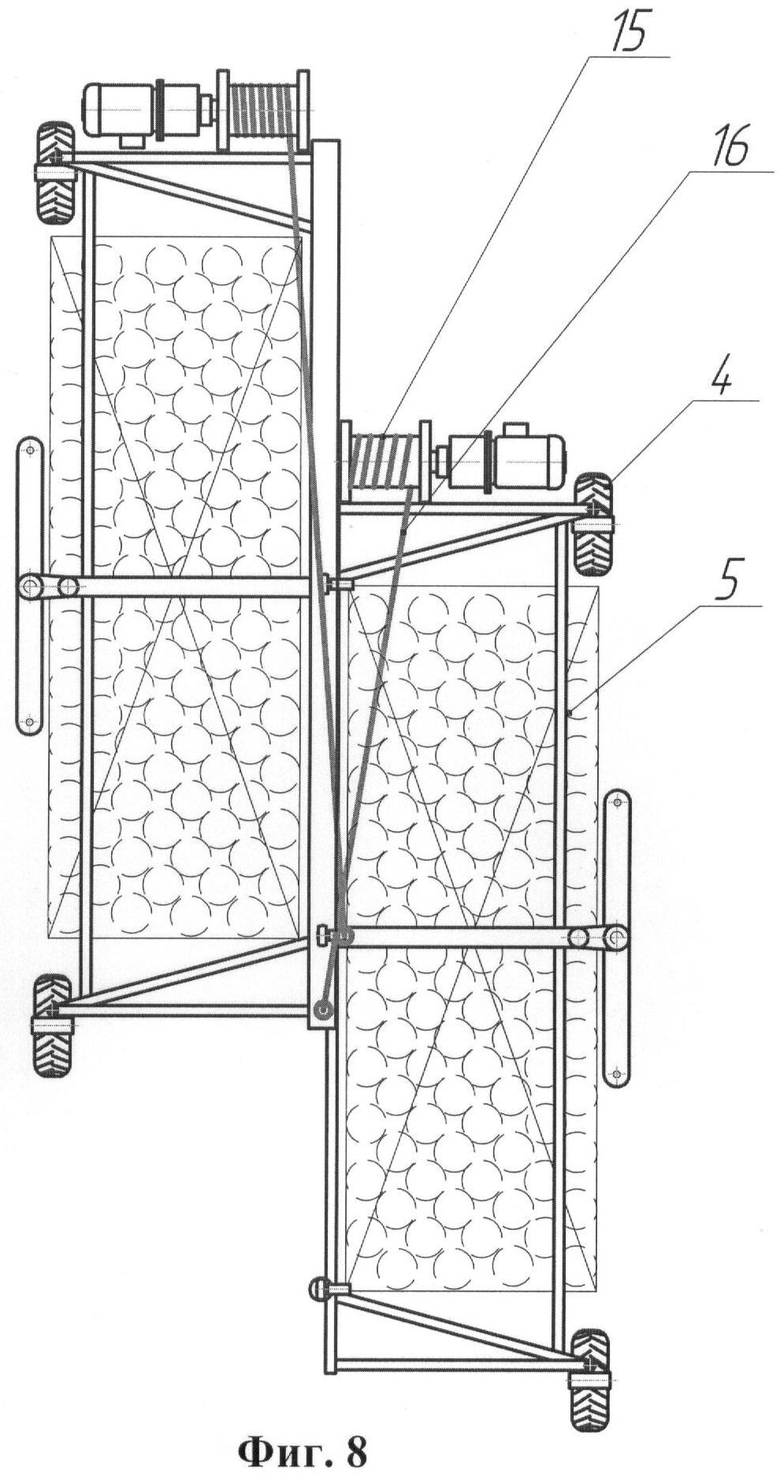
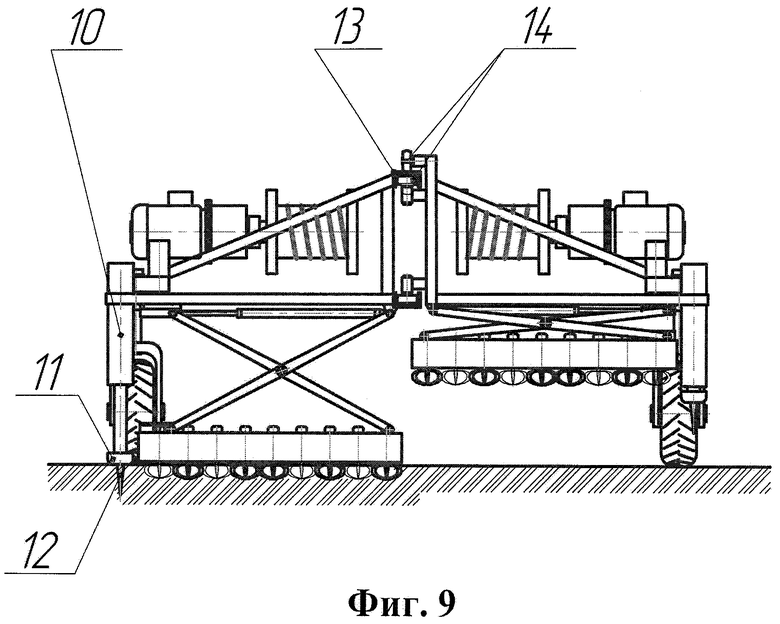
Другой вариант исполнения агромодуля позволяет обойтись без отдельно взятой тележки с продольным лонжероном и поперечными балками. На фиг.7, 8 представлен агромодуль до и после шагового перемещения, колеса 4 которого расположены непосредственно на несущих полурамах 5, по внешним углам полурам, по два колеса на каждой полураме, а сами несущие полурамы соединены друг с другом посредством направляющих рельс 13 и опорных катков 14 (фиг.9), обеспечивающих возможность возвратно-поступательного перемещения полурам относительно друг друга за счет тросового привода, состоящего из двух тяговых электрических лебедок 15, каждая из которых закреплена на несущей полураме, а трос 16 от каждой лебедки закреплен за смежную несущую полураму.
Принцип действия обоих агромодулей практически аналогичен. Пошаговое поступательное перемещение агромодуля с тросовым приводом по занимаемой полосе прохода осуществляется следующим образом. Передняя по ходу движения несущая полурама 5 опускает анкер 10, пока лыжа 11 не заглубит грунтозацепы 12 в землю. Затем несущая полурама опускает, например, адаптивный электрический плуг, производит обработку почвы с учетом заданной глубины и степени ее разрыхления, завершив операцию, поднимает плуг. Включается тросовый 16 привод и агромодуль на колесах 4 перекатывается вперед по ходу движения, причем задняя несущая полурама перемещается в переднее положение. Теперь уже эта несущая полурама производит обработку почвы. Таким образом производится пошаговая обработка занимаемой полосы прохода. На самом деле процесс упорно-перемещаемого взаимодействия несущих полурам позволяет синхронизировать их работу так, что сразу же после фиксации одна из них приступает к работе, а другая, в это же время, завершив работу на своем участке, освобождается от упора (фиксации) и перемещается на один шаг вперед и т.д. Таким образом, пошаговое перемещение агромодуля становится практически условно непрерывным. Далее, дойдя до края поля, агромодуль опускает соответствующий анкер 10 с лыжей и грунтозацепами и совершает переход на смежную (необработанную) полосу прохода за счет своего разворота вокруг анкера на 180° при помощи специального привода. Став на новую (необработанную) полосу прохода, агромодуль приступает к ее обработке, перемещаясь при этом в обратном направлении и т.д.
Работа агромодуля осуществляется в автоматизированном режиме. Маршрутизация упорядоченного перемещения агромодуля по полю (технологическому маршруту) обеспечивается программируемым блоком автоматического управления. Коррекция траектории перемещения агромодуля в пределах конкретного поля, при его отклонении от заданных программой координат, производится автоматически с помощью навигатора системы ГЛОНАСС или GPS.
| название | год | авторы | номер документа |
|---|---|---|---|
| АГРОМОДУЛЬ | 2010 |
|
RU2451439C1 |
| АГРОМОДУЛЬ | 2010 |
|
RU2451441C1 |
| АГРОМОДУЛЬ И АГРОМОСТ | 2011 |
|
RU2457647C1 |
| АДАПТИВНЫЙ ЭЛЕКТРИЧЕСКИЙ ПЛУГ (ВАРИАНТЫ) | 2010 |
|
RU2457644C2 |
| Рспределяюще-корректирующее тягово-сцепное устройство для полурамного трактора | 2022 |
|
RU2780683C1 |
| Корректор-распределитель сцепного веса бороновального машинно-тракторного агрегата | 2022 |
|
RU2782360C1 |
| Машина для проходки горных выработок | 1974 |
|
SU618059A3 |
| НАВЕСНОЕ УСТРОЙСТВО К ЖАТКАМ КОМБАЙНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2006 |
|
RU2316166C1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473197C1 |
| Машина многофункциональная сельскохозяйственная | 2020 |
|
RU2760914C1 |
Группа изобретений относится к области сельского хозяйства, а именно к особым средствам повышенной проходимости для комплексного возделывания и уборки сельскохозяйственных культур. Агромодуль для комплексного возделывания и уборки сельскохозяйственных культур содержит опорную тележку с продольным форменным лонжероном и поперечными балками, на которых установлены бесприводные колеса, и две несущие полурамы, предназначенные для работы с навесным агротехнологическим оборудованием. В первом варианте выполнения агромодуля несущие полурамы размещены на обеих сторонах лонжерона вдоль продольной оси тележки с возможностью перемещения вдоль продольного лонжерона во взаимно противоположных направлениях, и выполнены с возможностью обеспечения движения посредством замкнутого цепного привода, натянутого на две звездочки, к каждой ветви которого прикреплена упомянутая несущая полурама, а в середине наружных сторон полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорных лыж и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки. Аромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого цепного привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода. Во втором варианте выполнения агромодуля по внешним углам каждой из полурам установлено опорное бесприводное колесо, при этом для возвратно-поступательного перемещения несущих полурам относительно друг друга каждая из них снабжена тросовым приводом, состоящим из двух тяговых электрических лебедок с тросом, каждая из которых установлена на несущей полураме, а ее трос закреплен на смежной несущей полураме. В середине наружных сторон несущих полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорной лыжи и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки. Агромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого тросового привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода. В частном варианте грунтозацепы на лыжах могут быть выполнены в виде забуриваемых анкеров с собственными приводами вращения и заглубления. Заявленная группа изобретений заключается в обеспечении обусловленного повышения эффективности комплексного возделывания и уборки сельскохозяйственных культур. 2 н. и 2 з.п. ф-лы, 9 ил.
1. Агромодуль для комплексного возделывания и уборки сельскохозяйственных культур, содержащий опорную тележку с продольным форменным лонжероном и поперечными балками, на которых установлены бесприводные колеса, и две несущие полурамы, предназначенные для работы с навесным агротехнологическим оборудованием, отличающийся тем, что несущие полурамы размещены на обеих сторонах лонжерона вдоль продольной оси тележки с возможностью перемещения вдоль продольного лонжерона во взаимно противоположных направлениях и выполнены с возможностью обеспечения движения посредством замкнутого цепного привода, натянутого на две звездочки, к каждой ветви которого прикреплена упомянутая несущая полурама, а в середине наружных сторон полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорных лыж и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки, при этом агромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого цепного привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода.
2. Агромодуль по п.1, отличающийся тем, что грунтозацепы на лыжах выполнены в виде забуриваемых анкеров с собственными приводами вращения и заглубления.
3. Агромодуль для комплексного возделывания и уборки сельскохозяйственных культур, содержащий две несущие полурамы на опорных бесприводных колесах, предназначенные для работы с навесным агротехнологическим оборудованием, соединенные друг с другом вдоль образуемой ими продольной оси посредством направляющих рельсов и опорных катков с возможностью возвратно-поступательного перемещения относительно друг друга, отличающийся тем, что по внешним углам каждой из полурам установлено опорное бесприводное колесо, при этом для возвратно-поступательного перемещения несущих полурам относительно друг друга каждая из них снабжена тросовым приводом, состоящим из двух тяговых электрических лебедок с тросом, каждая из которых установлена на несущей полураме, а ее трос закреплен на смежной несущей полураме, причем в середине наружных сторон несущих полурам установлены анкеры, состоящие из опорной лыжи с двумя грунтозацепами в виде двух заостренных штырей на концах опорной лыжи и опорной стойки, имеющей механизмы вертикального перемещения опорной лыжи и ее поворота вокруг вертикальной оси опорной стойки, при этом агромодуль выполнен с возможностью упорядоченного пошагового перемещения при помощи упомянутого тросового привода и согласованной системы фиксации упорного положения несущих полурам в виде заглубляемых грунтозацепов, а упомянутые анкеры снабжены приводами и выполнены с возможностью коррекции возможных отклонений агромодуля от заданной траектории перемещения и смены полосы прохода.
4. Агромодуль по п.3, отличающийся тем, что грунтозацепы на лыжах выполнены в виде забуриваемых анкеров с собственными приводами вращения и заглубления.
| СПОСОБ ВЕДЕНИЯ СЕЛЬСКОГО ХОЗЯЙСТВА И СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262219C2 |
| RU 2055457 C1, 10.03.1996 | |||
| АГРОКОМПЛЕКС | 1998 |
|
RU2146432C1 |
| Агрокомплекс | 1990 |
|
SU1782367A1 |
| 0 |
|
SU188764A1 | |

