Адаптивный электрический плуг (варианты).
Изобретения относятся к области сельскохозяйственного машиностроения и могут быть использованы в мостовом земледелии.
Известны плуги и устройства для основной и глубокой обработки (разуплотнения) почвы (SU 1148577 А1, 07.04.1985; SU 1407423 A1, 07.07.1988; RU 2131653 C1, 20.06.1999).
Основными недостатками известных плугов и устройств (характерными для них в той или иной мере) являются: предплужное уплотнение почвы, разрушающее плодородный слой; образование лемехами лап «плужной подошвы», нарушающей водно-воздушный режим и снижающей плодородие почвы; объективные (жесткие) ограничения по глубине обработки и степени разрыхления почвы; высокая энергоемкость штатных операций; переуплотнение плодородного слоя почвы колесными и гусеничными ходовыми системами машин, используемых для работы с известными плугами и устройствами.
Наиболее близкими по технической сущности к заявленным изобретениям являются выбранные в качестве прототипа электрокультиваторы, содержащие электродвигатель, редуктор, рабочие органы, раму, руль (1. Электрокультиватор «Жук». Руководство по эксплуатации, Тула, 1991; 2. Электрокультиватор ЭК - 1500. Паспорт ЭШТИ 271.135003. ПС, Целиноград, 1990).
Известные электрокультиваторы относятся к средствам малой механизации и предназначены для обработки почвы на малых фермах и в личных подсобных хозяйствах. Тем не мене, известные электрокультиваторы объективно лишены многих характерных недостатков, присущих известным плугам и устройствам, предназначенным для основной и глубокой обработки почвы.
Задачей заявленной группы изобретений является обеспечение комплексного повышения глубины, качества и эффективности обработки пахотных земель за счет принципиального изменения основного вектора обработки почвы с горизонтального на вертикальный.
Технический результат заявленной группы изобретений - подъем и рыхление почвы - осуществляются одновременно (комплексно) с учетом заданной глубины и степени разрыхления почвы, усилие тяги при работе адаптивного электрического плуга отсутствует, тем самым исключается образование предплужного уплотнения почвы и появление существенных боковых нагрузок при эксплуатации адаптивного электрического плуга, то есть становится возможным использовать адаптивный электрический плуг в качестве навесного оборудования специализированных агроагрегатов (агромостов) без разработки каких-либо дополнительных защитных систем, применяемых обычно для компенсации несимметричности соответствующих рабочих усилий. Отсутствие существенных тяговых усилий при работе агромоста со стороны навесных орудий позволяет уменьшить его металлоемкость (вес), снизить потребную мощность приводов его движителей, облегчить его перемещение по полю и достижение высокой точности позиционирования не только при смене позиции агромоста, но и по ходу выполнения необходимых агротехнических операций, включая и самую энергоемкую операцию, подъем и рыхление почвы. Заявленный плуг адаптируется к различным почвам и условиям работы.
Технический результат достигается тем, что в известном адаптивном электрическом плуге, содержащем несущую раму и установленные на ней рабочие органы на валах с приводом вращения, согласно изобретению несущая рама снабжена четырьмя попарно расположенными на продольных и поперечных элементах рамы шаровыми шарнирами, связанными с рычажными механизмами с гидроцилиндрами для подвески плуга на агроагрегат, имеющий автоматическую систему управления, и тремя щупами со встроенными в них датчиками положения, причем датчики и гидроцилиндры связаны с автоматической системой управления агроагрегата для обеспечения параллельности несущей рамы относительно поверхности земли при опускании и подъеме рабочих органов, при этом рабочие органы установлены на вертикальных валах с приводом от электро- или гидромоторов с возможностью вращения как по часовой, так и против часовой стрелки, а подъем и рыхление почвы осуществляются одновременно (комплексно) за счет вращения рабочих органов в стационарно-дискретном (пошаговом) режиме с учетом задаваемой глубины и степени разрыхления почвы. Кроме того, каждый из рабочих органов выполнен в виде по крайней мере двух радиально расположенных и закрепленных на валу режущих ножей, рабочие органы установлены на несущей раме в два ряда, сдвинутых относительно друг друга вправо или влево на половину расстояния между соседними в ряду рабочими органами, при этом в каждом ряду рабочие органы установлены с минимальным зазором, а расстояние между рядами равно трем длинам режущих ножей. Рабочие органы выполнены сменными.
Это достигается также тем, что известный адаптивный электрический плуг, содержащий несущую раму и установленные на ней рабочие органы на валах с приводом вращения, согласно второму варианту выполнения имеет автоматическую систему управления положением плуга, а несущая рама снабжена четырьмя попарно расположенными на продольных и поперечных элементах рамы шаровыми шарнирами, связанными с рычажными механизмами с гидроцилиндрами для подвески плуга на агроагрегат, и тремя щупами со встроенными в них датчиками положения, датчики и гидроцилиндры связаны с автоматической системой управления для обеспечения вращения, подъема и опускания рабочих органов, при этом рабочие органы установлены на вертикальных и горизонтальных валах с приводом от электро- или гидромоторов, причем рабочие органы установлены на вертикальных валах с возможностью вращения половины рабочих органов по часовой, а другой половины рабочих органов - против часовой стрелки, а подъем и рыхление почвы рабочими органами осуществляются в режиме непрерывного поступательного движения плуга. Кроме того, каждый рабочий орган, закрепленный на вертикальных валах, выполнен в виде двух криволинейных замкнутых режущих рамок, при вращении которых описывается поверхность, близкая по форме к цилиндру. Каждый рабочий орган на горизонтальном валу выполнен в виде диска, на периферии которого установлены и закреплены трехлепестковые режущие ножи Т-образной формы, при этом в ряду рабочие органы на вертикальных валах установлены с минимальным зазором, расстояние между рабочими органами на горизонтальных валах равно расстоянию между рабочими органами в ряду с вертикальными валами, а весь ряд рабочих органов на горизонтальном валу сдвинут на половину расстояния между рабочими органами на вертикальных валах. Рабочие органы выполнены сменными.
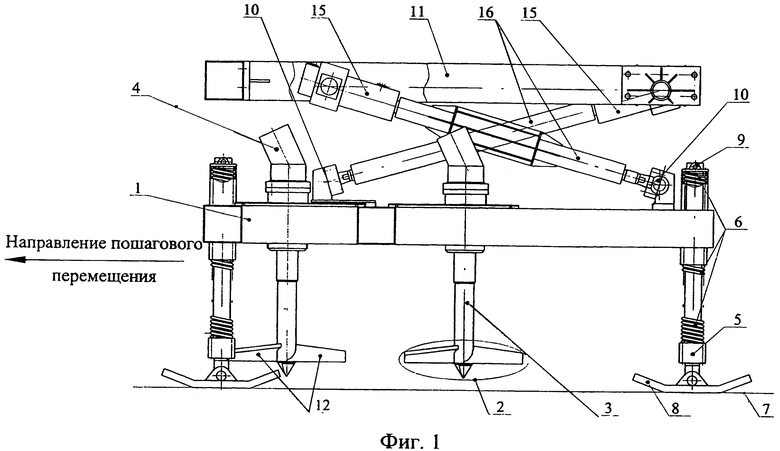
Один из вариантов исполнения адаптивного электрического плуга для подъема и рыхления почвы в стационарно-дискретном (пошаговом) режиме показан на фиг.1 и 2. Адаптивный электрический плуг содержит: несущую раму 1; установленные на несущей раме рабочие органы 2 на вертикальных валах 3 с приводом от гидромоторов 4. Три щупа 5 со встроенными в них датчиками положения (не показаны) установлены на несущей раме. Щупы 5 имеют возможность перемещаться относительно несущей рамы 1 под действием, например, пружины 6 в вертикальном направлении до контакта с поверхностью земли 7. Нижний конец щупов выполнен в виде опорной площадки 8. Верхний конец щупа имеет отверстие 9, которое позволяет при необходимости фиксировать (заштыривать) щуп в крайнем нижнем его положении. Несущая рама снабжена четырьмя шаровыми шарнирами 10, два из которых расположены вдоль несущей рамы (см. фиг.1), а другие два шарнира - в поперечном направлении (на фиг.1, 2 не показаны). Каждая пара шарниров служит для подвешивания адаптивного электрического плуга к внешнему специализированному агроагрегату - агромосту, через его рычажные механизмы 11. Рабочие органы 2 выполнены в виде двух радиально расположенных ножей 12, закрепленных на валу 3.
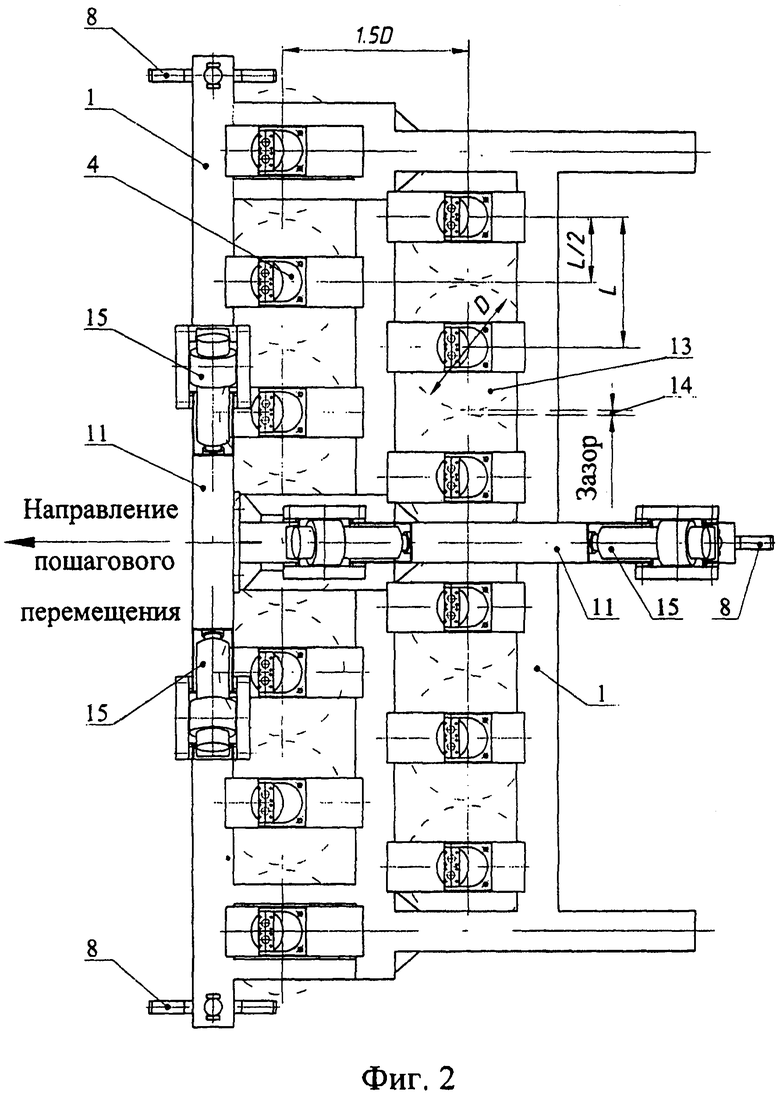
Радиальные размеры ножей 12 рабочего органа 2 определяют диаметр D круга рыхления 13 (см. фиг.2).
Рабочие органы 2 установлены на несущей раме 1 в два ряда с минимальными зазорами 14 между кругами рыхления 13 (см. фиг.2). Второй ряд отстоит от первого на полтора диаметра D круга рыхления 13 (см. фиг.2) и сдвинут относительно первого на половину расстояния L между соседними в ряду рабочими органами (см. фиг.2).
Исходное положение адаптивного электрического плуга, показанного на фиг.1 и 2, соответствует его положению над поверхностью земли, когда его рабочие органы 2 не касаются почвы, а адаптивный электрический плуг подвешен за шаровые шарниры 10 к внешнему специализированному агроагрегату - агромосту (не показанному на фиг.1, 2) через его рычажные механизмы 11. Кроме механической связи, адаптивный электрический плуг связан с агромостом гидрокоммуникациями, через которые гидромоторы 4 его рабочих органов 2 приводятся в движение, а также электрическим кабелем от датчиков положения щупов 5. Все эти коммуникации на фиг.1, 2, чтобы не загромождать фигуры, условно не показаны.
Адаптивный электрический плуг используется как навесное орудие специализированного агроагрегата - агромоста - и содержит только исполнительные приводы - приводы его рабочих органов. Специализированный агроагрегат - агромост - содержит в своем составе подвижную (вдоль направляющих агроагрегата) каретку, на которой закреплены два рычажных механизма, мощную энергетическую установку - в данном случае насосную станцию и автоматическую систему управления положением адаптивного электрического плуга относительно земли, его перемещением в вертикальном направлении, перемещением адаптивного электрического плуга (пошаговом, в рассматриваемом режиме работы) вдоль агромоста по его направляющим, а также работой соответствующих (энергоэффективных) движителей агромоста при смене позиции всего агромоста по намеченному, оптимальному для конкретного поля маршруту. Конструкция агромоста, его система управления, система «привязки» агромоста к местности (полю) и другие его особенности здесь не рассматриваются.
Адаптивный электрический плуг работает следующим образом. Первая операция - заглубление адаптивного электрического плуга в почву. От насосной станции агромоста рабочая жидкость подается на гидромоторы 4 адаптивного электрического плуга. Гидромоторы 4 через вертикальные валы 3 вращают рабочие органы 2 адаптивного электрического плуга. Одновременно с этим рабочая жидкость подается в поршневые полости гидроцилиндров 15, являющиеся продолжением рычагов 16 рычажного механизма 11 агромоста. Раздвигаясь, гидроцилиндры 15 увеличивают длину рычагов 16 рычажного механизма 11, что приводит к перемещению несущей рамы 1 адаптивного электрического плуга вниз и заглублению его рабочих органов 2 в почву. В результате вращения рабочих органов 2 и их вертикального перемещения происходят подъем и рыхление почвы в пределах круга рыхления 13 (см. фиг.2). При заглублении рабочих органов 2 в почву (т.е. опускании несущей рамы 1) щупы 5 продолжают оставаться в прежнем положении - касаться поверхности земли. Датчики положения, встроенные в щупы 5, регистрируют смещение несущей рамы 1 относительно неподвижных щупов. Это смещение в виде электрического сигнала поступает в систему управления агромоста и по достижении заданной величины этого сигнала, т.е. достижении необходимого заглубления рабочих органов 2, прекращается подача рабочей жидкости в гидроцилиндры 15; движение вниз (заглубление рабочих органов 2 в почву) прекращается.
Вторая операция - перемещение рабочих органов 2 (т.е. перемещение несущей рамы 1) вертикально вверх. Не прекращая вращения гидромоторов 4, включается подача рабочей жидкости в штоковые полости гидроцилиндров 15 рычажного механизма 11 агромоста. В этом случае длина рычагов 16 уменьшается, и несущая рама 1 вместе со своими рабочими органами 2 подтягивается рычажным механизмом 11 вверх. Подъем адаптивного электрического плуга (как и во время его опускания) контролируется датчиками перемещений, встроенными в щупы 5. При достижении гарантированного зазора между поверхностью почвы и рабочими органами 2 подача рабочей жидкости в гидроцилиндры 15 прекращается и рычажный механизм 11 фиксирует верхнее положение адаптивного электрического плуга.
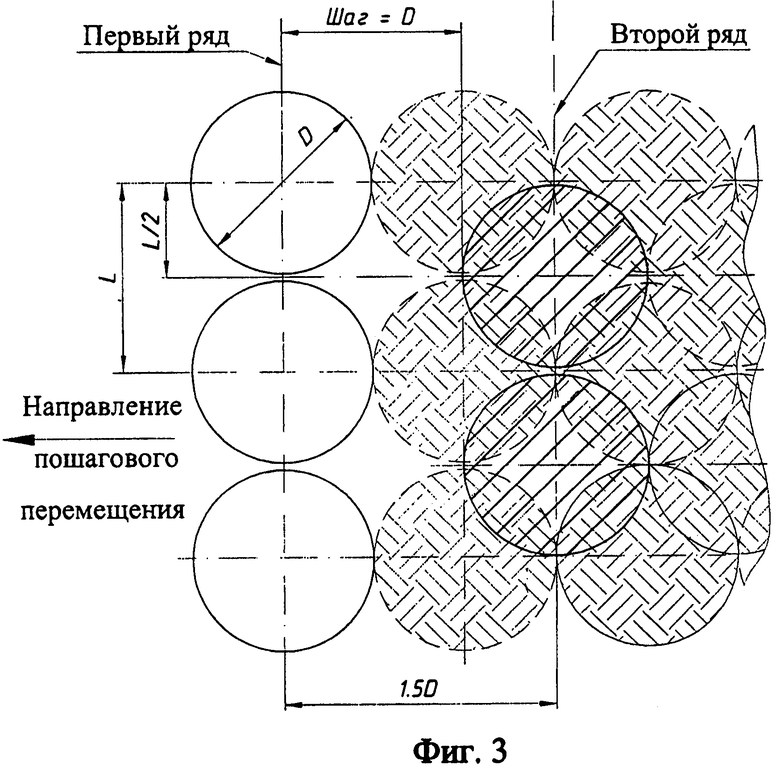
Третья операция - перемещение адаптивного электрического плуга (над землей) вдоль агромоста по его направляющим дискретно на один шаг. Шаг перемещения адаптивного электрического плуга при смене его позиции равен диаметру круга рыхления - D. При таком шаге круги рыхления перекрывают друг друга (см. фиг.3), не оставляя необработанных участков почвы.
Адаптивный электрический плуг подвешен рычажными механизмами 11 к подвижной каретке агромоста. Для перемещения адаптивного электрического плуга вдоль агромоста на один шаг необходимо передвинуть соответствующим приводом подвижную каретку агромоста по его направляющим. Поскольку предметом изобретения является только адаптивный электрический плуг - конструкция, функции и прочие подробности устройства агромоста здесь не рассматриваются.
Далее, из нового положения адаптивного электрического плуга весь цикл движений повторяется (опускание адаптивного электрического плуга, подъем плуга, перемещение плуга на один шаг и т.д.).
Пройдя пошагово всю длину агромоста (до конца направляющих), перемещение подвижной каретки и связанного с ней адаптивного электрического плуга прекращается. Под агромостом осталась полоса взрыхленной почвы. Агромост целиком, вместе с подвешенным к нему адаптивным электрическим плугом, перемещается параллельно обработанной полосе почвы на расстояние, равное ширине полосы обработки почвы, фиксируется в новом положении и включает в работу адаптивный электрический плуг по рассмотренному алгоритму работы, с той лишь разницей, что пошаговое движение каретки агромоста и связанного с ней адаптивного электрического плуга совершается в обратном направлении.
Степень разрыхления почвы задается специальной программой - соотношением скоростей вращения рабочих органов 2 и скоростью их вертикального перемещения, т.е. регулированием расходов рабочей жидкости на гидромоторы 4 и гидроцилиндры 15 рычажных механизмов 11 (см. фиг.1). Для обеспечения одинаковой величины заглубления рабочих органов 2 (глубины вспашки) в пределах адаптивного электрического плуга несущая рама 1 адаптивного электрического плуга должна быть параллельной относительно поверхности земли. Параллельность рамы 1 адаптивного электрического плуга достигается тем, что сигналы с датчиков положения, встроенных в щупы 5, используются для корректировки подачи рабочей жидкости в гидроцилиндры 15 рычажных механизмов. В случае рассогласования в показаниях датчиков положения (несущая рама 1 перекошена относительно поверхности земли) в системе управления агромоста формируется управляющий сигнал, приводящий к нарушению баланса расходов рабочей жидкости, направляемых в гидроцилиндры 15 рычажных механизмов.
При одинаковых расходах рабочей жидкости, подаваемой в гидроцилиндры 15, последние удлиняются (укорачиваются) с равной скоростью и рама 1 совершает вертикальное перемещение плоско-параллельно. Если баланс расходов нарушить, то рама 1 адаптивного электрического плуга помимо вертикального перемещения начинает поворачиваться в продольном или поперечном направлении. Автоматическая система управления вертикальным перемещением несущей рамы 1 (адаптивного электрического плуга) стремится минимизировать рассогласование между показаниями датчиков положения - работает так называемая отрицательная обратная связь. Этим достигается приспособление (адаптация) к реальному рельефу поверхности земли. Для уравновешивания (компенсации) в горизонтальной плоскости моментов, возникающих при рыхлении почвы, половина рабочих органов 2 вращаются в одном направлении, другая половина - в другом направлении.
Менять режим рыхления почвы можно не только по заданной наперед программе, но и корректировать его в зависимости от реальной нагрузки на приводы рабочих органов (гидромоторов 4), используя в качестве объективного показателя нагрузки давление рабочей жидкости.
Для проведения регламентных работ с адаптивным электрическим плугом вне состава агромоста, хранения или транспортировки адаптивного электрического плуга его щупы 5 фиксируются в нижнем (относительно несущей рамы 1) положении - заштыриваются через отверстие 9 (см. фиг.1) и используются (щупы) как технологические опоры.
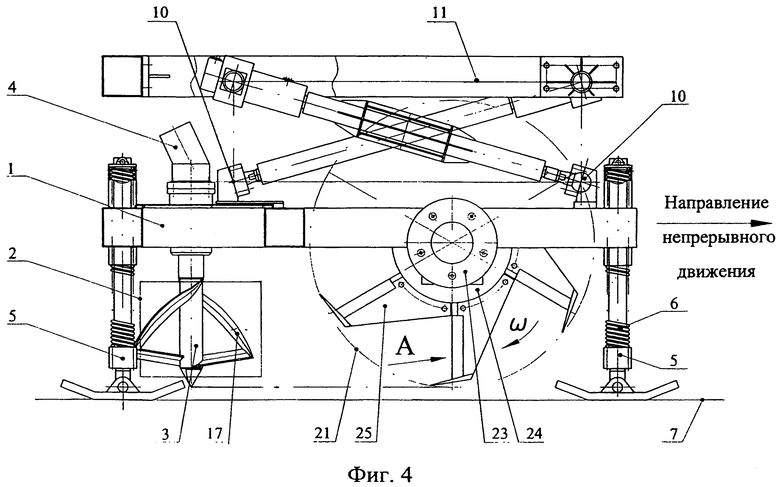
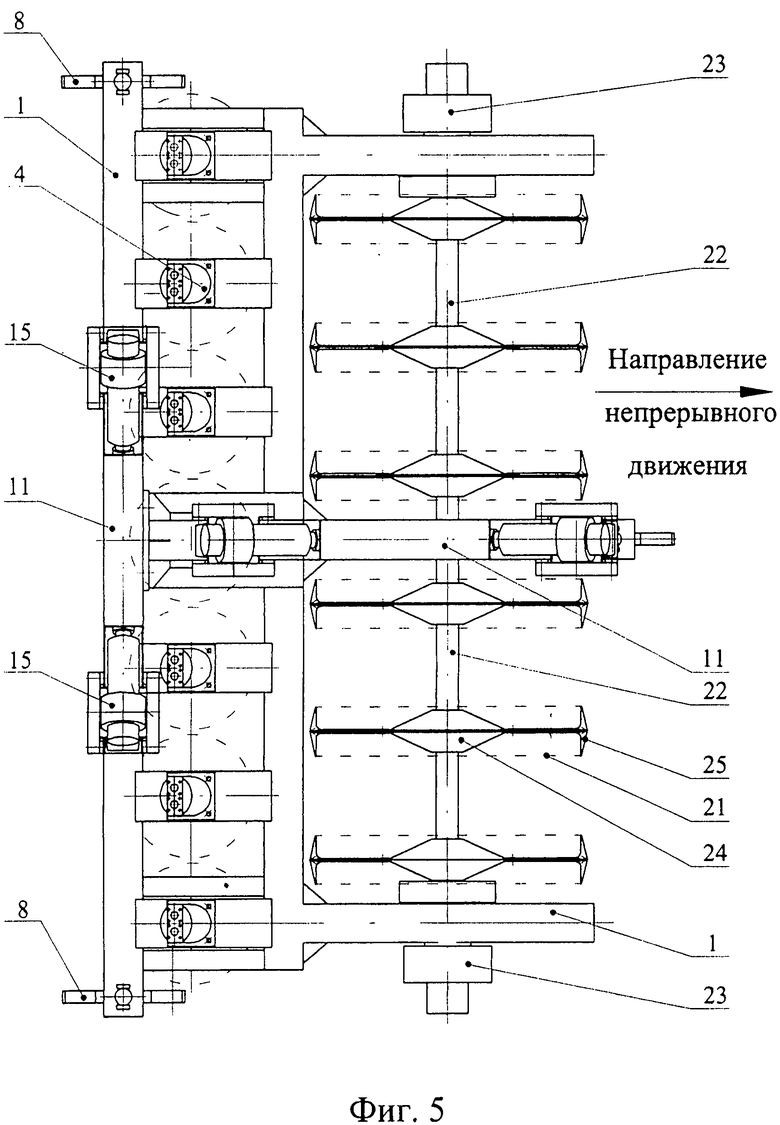
Пример исполнения адаптивного электрического плуга для рыхления почвы в непрерывном режиме показан на фиг.4, 5, 6.
Адаптивный электрический плуг для рыхления почвы в непрерывном режиме содержит, как и в рассмотренном выше варианте, несущую раму 1, установленные на несущей раме рабочие органы 2 на вертикальных валах 3 с приводом от гидромоторов 4. По краям несущей рамы 1 установлены три щупа 5. Щупы 5 под действием пружины 6 могут перемещаться в вертикальном направлении, поддерживая контакт с поверхностью земли 7. Несущая рама 1 снабжена четырьмя шаровыми шарнирами 10, два из которых расположены вдоль несущей рамы, а два других шарнира - в поперечном направлении. Каждая пара шарниров служит для подвешивания адаптивного электрического плуга к внешнему агроагрегату - агромосту, через его рычажные механизмы 11.
Отличия от рассмотренного выше варианта исполнения адаптивного электрического плуга заключаются в конструкции рабочих органов.
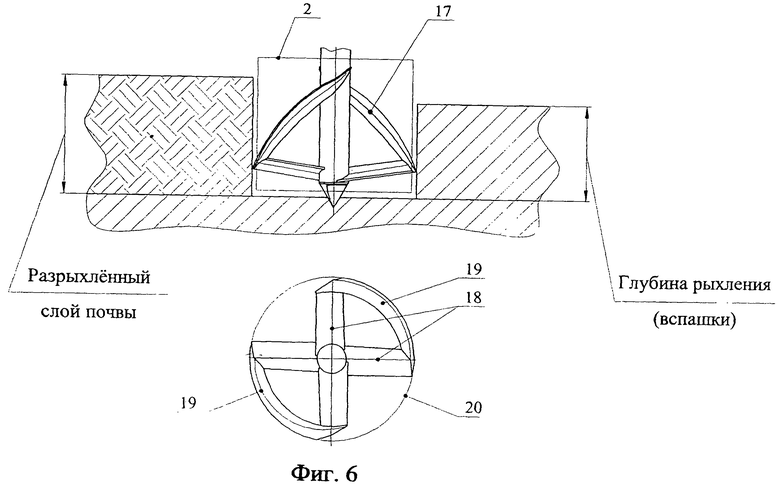
Во-первых, с целью обеспечения рыхления почвы в режиме непрерывного поступательного движения адаптивного электрического плуга его рабочие органы 2, закрепленные на вертикальных валах 3, выполнены в виде замкнутых режущих почву рамок 17, при вращении которых описывается поверхность, близкая по форме к цилиндру, высота которого не менее глубины рыхления (вспашки).
Фактически, к радиальным ножам 18 добавились наклонные (по винтовой линии) ножи 19, при вращении которых описывается цилиндрическая поверхность 20 (см. фиг.6).
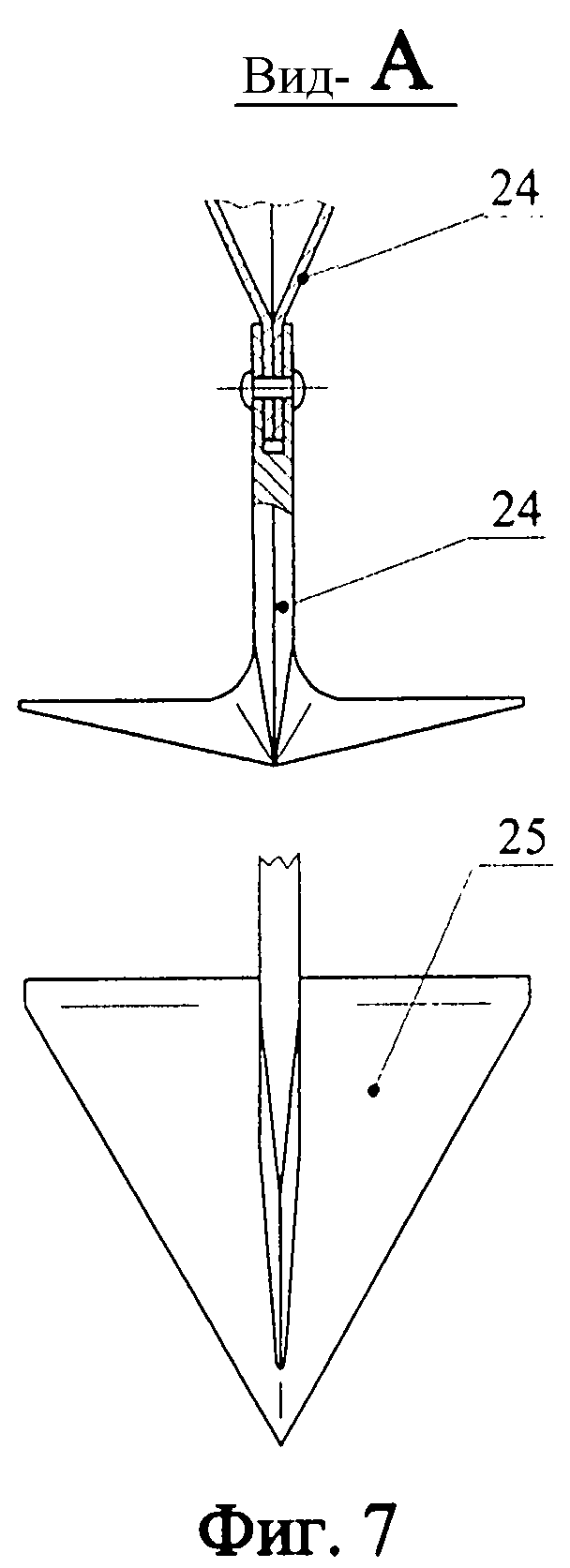
Во-вторых, для исключения необходимости во внешнем тяговом усилии в режиме непрерывного движения адаптивного электрического плуга один ряд его рабочих органов выполнен на вертикальных валах 3, а другой ряд образован рабочими органами 21, закрепленными на двух горизонтальных валах 22 с приводом от двух высокомоментных гидромоторов 23 (см. фиг.4 и 5). Каждый рабочий орган 21 на горизонтальном валу выполнен в виде диска 24, на периферии которого установлены (закреплены) трехлепестковые режущие ножи 25 Т-образной формы. Более подробно Т-образный (трехлепестковый) режущий нож показан на фиг.7.
Адаптивный электрический плуг непрерывного рыхления почвы, фиг.4, 5, работает следующим образом.
Первая операция - заглубление рабочих органов адаптивного электрического плуга из исходного (подвешенного над землей) положения до требуемой глубины вспашки так же, как и в первом случае (см. выше), совершается рычажными механизмами 11 внешнего агроагрегата - агромоста с учетом показаний датчиков положения, встроенных в щупы 5 плуга.
Вторая операция - непрерывное рыхление почвы, т.е. непрерывное поступательное движение адаптивного электрического плуга так же, как и в первом случае, совершается движением подвижной каретки агромоста по его направляющим. Отличие в этой операции в том, что адаптивный электрический плуг перемещается, непрерывно следуя направляющим агромоста, сразу на всю его длину с заглубленными в почву (на глубину вспашки) рабочими органами.
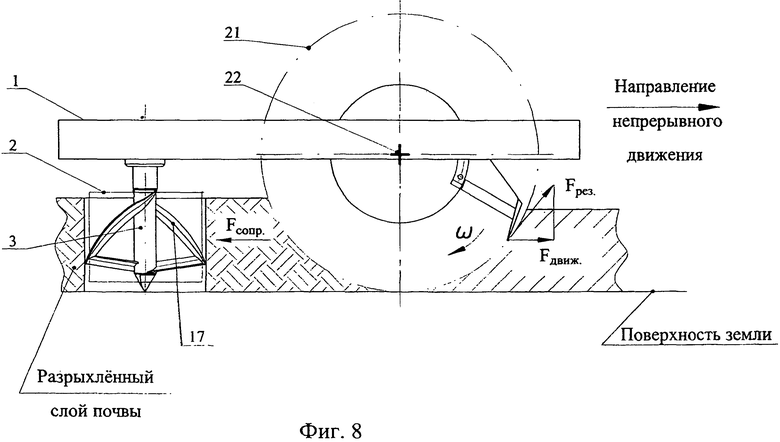
Такой режим работы адаптивного электрического плуга стал возможным в результате изменения формы рабочих органов 2 на вертикальных валах - появились режущие кромки, вступающие в работу при поступательном движении адаптивного электрического плуга. Очевидно, что для осуществления поступательного движения рабочих органов на вертикальных валах к ним необходимо приложить тяговое усилие (надо преодолеть силу сопротивления). Такое тяговое усилие создается введением дополнительных рабочих органов 21 (также рыхлящих почву), установленных на горизонтальных валах 22, фиг.4, 5.
На фиг.8 показана схема действующих сил при совместной работе рабочих органов 2 на вертикальных валах 3 и рабочих органов 21 на горизонтальных валах 22. Видно, что при работе рабочих органов 21 на горизонтальных валах 22 существует горизонтальная составляющая Fдвиж сил резания Fрез. При оптимальном конструировании силы сопротивления движению Fсопр, возникающие на рабочих органах 2, можно полностью компенсировать горизонтальной силой Fдвиж, возникающей на рабочих органах 21, установленных на горизонтальных валах 22. Намеренной разбалансировкой этих сил можно создавать ситуацию, когда Fдвиж>Fсопр. В этом случае адаптивный электрический плуг становится самодвижущимся и внешний агроагрегат - агромост - только направляет его движение по своим направляющим и выполняет функции поддержания глубины вспашки и параллельности несущей рамы 1 адаптивного электрического плуга поверхности земли.
Пройдя весь путь по направляющим агромоста, адаптивный электрический плуг останавливается (фактически останавливается подвижная каретка, к которой адаптивный плуг подвешен) и начинаются следующие операции - подъем адаптивного электрического плуга над землей и смена позиции агромоста. Описание этих операций подробно изложено в предыдущем случае (см. выше).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473197C1 |
| АГРОМОДУЛЬ | 2010 |
|
RU2451439C1 |
| АГРОМОДУЛЬ ( ВАРИАНТЫ) | 2010 |
|
RU2451440C1 |
| АГРОМОДУЛЬ | 2010 |
|
RU2451441C1 |
| АГРОМОДУЛЬ И АГРОМОСТ | 2011 |
|
RU2457647C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| Выдвижная секция для обработки почвы в рядах древесных насаждений | 1972 |
|
SU470262A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| ПЛОЩАДКОДЕЛАТЕЛЬ | 2012 |
|
RU2496294C1 |
| Приспособление к плугам для открывания виноградной лозы | 1957 |
|
SU110840A1 |
Изобретение относится к сельскохозяйственному машиностроению. Плуг содержит несущую раму и установленные на ней рабочие органы на валах с приводом вращения. Несущая рама снабжена рычажными механизмами для подвески плуга на агроагрегат и тремя щупами. Рычажные механизмы связаны с рамой четырьмя попарно расположенными на продольных и поперечных элементах рамы шаровыми шарнирами. Рычажные механизмы имеют гидроцилиндры. Щупы оснащены встроенными в них датчиками положения. Датчики и гидроцилиндры связаны с автоматической системой управления агроагрегата для обеспечения параллельности несущей рамы относительно поверхности земли при опускании и подъеме рабочих органов. По первому варианту выполнения для обеспечения одновременного подъема и рыхления почвы при вращении рабочих органов и их перемещения в стационарно-дискретном (пошаговом) режиме рабочие органы установлены на вертикальных валах с приводом от электро- или гидромоторов. Половина рабочих органов выполнена с возможностью вращения по часовой, а другая половина рабочих органов - против часовой стрелки. Согласно второму варианту выполнения рабочие органы установлены на вертикальных и горизонтальных валах с приводом от электро- или гидромоторов. Рабочие органы установлены на вертикальных валах с возможностью вращения половины рабочих органов по часовой, а другой половины рабочих органов - против часовой стрелки. Подъем и рыхление почвы рабочими органами осуществляются в режиме непрерывного поступательного движения плуга. Такое конструктивное выполнение позволит обеспечить одновременные подъем и рыхление почвы при снижении тягового усилия при работе плуга. 2 н. и 5 з.п. ф-лы, 8 ил.
1. Адаптивный электрический плуг, содержащий несущую раму и установленные на ней рабочие органы на валах с приводом вращения, отличающийся тем, что для обеспечения одновременного подъема и рыхления почвы при вращении рабочих органов и их перемещения в стационарно-дискретном (пошаговом) режиме несущая рама снабжена четырьмя попарно расположенными на продольных и поперечных элементах рамы шаровыми шарнирами, связанными с рычажными механизмами с гидроцилиндрами для подвески плуга на агроагрегат, имеющий автоматическую систему управления, и тремя щупами со встроенными в них датчиками положения, причем датчики и гидроцилиндры связаны с автоматической системой управления агроагрегата для обеспечения параллельности несущей рамы относительно поверхности земли при опускании и подъеме рабочих органов, при этом рабочие органы установлены на вертикальных валах с приводом от электро- или гидромоторов, при этом половина рабочих органов выполнена с возможностью вращения по часовой, а другая половина рабочих органов - против часовой стрелки.
2. Адаптивный электрический плуг по п.1, отличающийся тем, что каждый из рабочих органов выполнен в виде по крайней мере двух радиально расположенных и закрепленных на валу режущих ножей, рабочие органы установлены на несущей раме в два ряда, сдвинутых относительно друг друга вправо или влево на половину расстояния между соседними в ряду рабочими органами, при этом в каждом ряду рабочие органы установлены с минимальным зазором, а расстояние между рядами равно трем длинам режущих ножей.
3. Адаптивный электрический плуг по п.1, отличающийся тем, что рабочие органы выполнены сменными.
4. Адаптивный электрический плуг, содержащий несущую раму и установленные на ней рабочие органы на валах с приводом вращения, отличающийся тем, что несущая рама снабжена четырьмя попарно расположенными на продольных и поперечных элементах рамы шаровыми шарнирами, связанными с рычажными механизмами с гидроцилиндрами для подвески плуга на агроагрегат, и тремя щупами со встроенными в них датчиками положения, датчики и гидроцилиндры связаны с автоматической системой управления для обеспечения подъема и опускания рабочих органов, при этом рабочие органы установлены на вертикальных и горизонтальных валах с приводом от электро- или гидромоторов, причем рабочие органы установлены на вертикальных валах с возможностью вращения половины рабочих органов по часовой, а другой половины рабочих органов - против часовой стрелки, а подъем и рыхление почвы рабочими органами осуществляются в режиме непрерывного поступательного движения плуга.
5. Адаптивный электрический плуг по п.4, отличающийся тем, что каждый рабочий орган, закрепленный на вертикальных валах, выполнен в виде двух криволинейных замкнутых режущих рамок, при вращении которых описывается поверхность, близкая по форме к цилиндру.
6. Адаптивный электрический плуг по п.4, отличающийся тем, что каждый рабочий орган на горизонтальном валу выполнен в виде диска, на периферии которого установлены и закреплены трехлепестковые режущие ножи Т-образной формы, при этом в ряду рабочие органы на вертикальных валах установлены с минимальным зазором, расстояние между рабочими органами на горизонтальных валах равно расстоянию между рабочими органами в ряду с вертикальными валами, а весь ряд рабочих органов на горизонтальном валу сдвинут на половину расстояния между рабочими органами на вертикальных валах.
7. Адаптивный электрический плуг по п.4, отличающийся тем, что рабочие органы выполнены сменными.
| Электро-культиватор «ЖУК» | |||
| Руководство по эксплуатации | |||
| - Тула, 1991 | |||
| DE 19833764 A1, 03.02.2000 | |||
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДАХ | 2008 |
|
RU2374801C1 |
| СПОСОБ ГАЗОВОЙ ЦЕМЕНТАЦИИ ПОЛЫХ СТАКАНООБРАЗНЫХ ИЗДЕЛИЙ | 1941 |
|
SU64847A1 |
| Почвофреза с вертикальной осью вращения | 1990 |
|
SU1762770A1 |
| Ручной электрифицированный рыхлитель почвы | 1989 |
|
SU1704652A1 |
| Почвообрабатывающая машина | 1988 |
|
SU1604180A1 |
| Фрезерный культиватор для обработки почв в садах и виноградниках | 1987 |
|
SU1563603A1 |

