Заявление об установлении приоритета по закону 35 в своде законов США, § 119
Настоящая заявка на патент притязает на приоритет предварительной заявки № 61/060703, именуемой «Многосекторная оценка скорости и доплеровского сдвига подвижной станции для синхронных систем», поданной 11 июня 2008 г. и переуступленной ее правопреемнику, которая специально включена в настоящую заявку в виде ссылки.
Область техники
Настоящее изобретение относится в основном к устройству и способам оценки скорости и доплеровской частоты. В частности, настоящее изобретение относится к многосекторной оценке скорости и доплеровского сдвига подвижной станции для синхронных систем связи.
Уровень техники
Системы беспроводной связи обеспечивают различные услуги связи мобильным пользователям, которые находятся вдали от инфраструктуры фиксированной связи или перемещаются. В указанных системах беспроводной связи радиосвязь используется для осуществления взаимодействия мобильных устройств с различными базовыми станциями в зоне обслуживания. Базовые станции, в свою очередь, соединены с центрами коммутации мобильной связи, которые устанавливают соединения между мобильными устройствами и с другими устройствами в различных сетях связи, например, в коммутируемой телефонной сети общего пользования (PSTN), в сети Интернет и др. Таким образом, пользователи, находящиеся вдали от своих стационарных позиций или в движении, могут получать различные услуги связи, такие как голосовая телефония, пейджинг, передача сообщений, электронная почта, передача данных, передача видеоинформации, поиск и просмотр информации в Интернете и др.
В связи с использованием радиочастот для беспроводных соединений, все мобильные пользователи должны договориться о едином наборе протоколов для совместного использования небольшого радиочастотного спектра, выделенного на услуги беспроводной связи. Один из важных протоколов относится к методу доступа, используемому для соединения множества мобильных устройств с сетью беспроводной связи. К различным методам доступа относятся многостанционный доступ с частотным разделением (FDMA), многостанционный доступ с временным разделением (TDMA), многостанционный доступ с кодовым разделением (CDMA) и многостанционный доступ с ортогональным частотным разделением (OFDMA).
Сущность изобретения
Описаны устройство и способ для многосекторной оценки скорости и доплеровского сдвига подвижной станции для системы беспроводной связи в системах синхронной связи. В соответствии с одним вариантом осуществления предлагается способ оценки скорости и доплеровского сдвига в системе беспроводной связи, причем данный способ включает в себя использование приемника для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени; использование приемника для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени; использование приемника для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени; определение множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА; определение множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS; определение множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и использование процессора для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
В другом варианте осуществления предлагается подвижная станция, содержащая процессор и запоминающее устройство, причем запоминающее устройство содержит программный код, исполняемый процессором для осуществления следующего: использования приемника для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени; использования приемника для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени; использования приемника для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени; определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА; определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS; определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и использования процессора для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
В другом варианте осуществления предлагается подвижная станция для оценки скорости и доплеровской частоты, содержащая средство для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени; средство для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени; средство для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени; средство для определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА; средство для определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS; средство для определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и средство для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
В другом варианте осуществления предлагается машиночитаемый носитель информации, имеющий компьютерную программу, содержащую команды, которая, при выполнении ее, по меньшей мере, одним процессором, приводит к оценке скорости и доплеровской частоты, причем компьютерная программа содержит: команды для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени; команды для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени; команды для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени; команды для определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА; команды для определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS; команды для определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и команды для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
К преимуществам настоящего изобретения можно отнести (1) более высокую точность и надежность оценки скорости подвижной станции при использовании наличия сигнала от множества базовых станций, (2) более высокую точность и надежность оценки доплеровской частоты подвижной станции, полученной по оценке скорости подвижной станции, (3) лучшие характеристики по различным аспектам функционирования системы в зависимости от знания скорости или доплеровской частоты подвижной станции, и (4) очень низкую дополнительную сложность при использовании существующего типового метода отслеживания времени в прямой линии связи в подвижной станции.
Следует понимать, что другие варианты осуществления будут ясны специалистам при рассмотрении нижеследующего подробного описания, в котором различные варианты осуществления проиллюстрированы и описаны в качестве примера. Чертежи и подробное описание следует рассматривать как иллюстративные по своему характеру, а не как ограничительные.
Краткое описание чертежей
Фиг.1 - блок-схема, иллюстрирующая пример системы узла доступа/абонентской станции.
На фиг.2 приведен пример системы беспроводной связи, поддерживающей множество пользователей.
На фиг.3 приведен пример корреляции по времени прихода сигнала для одномерного (1-D) географического сценария.
На фиг.4 приведен пример корреляции по времени прихода сигнала для двумерного (2-D) географического сценария.
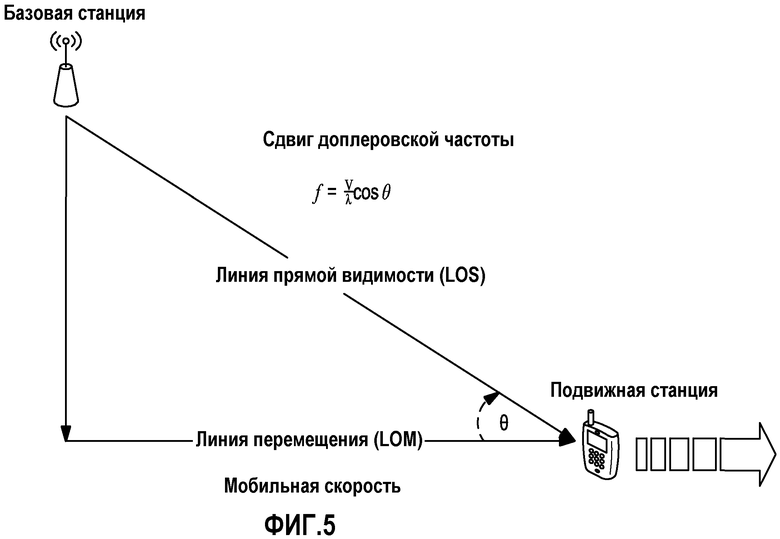
На фиг.5 приведен пример сценария линии прямой видимости (LOS) по сравнению со сценарием линии перемещения (LOM).
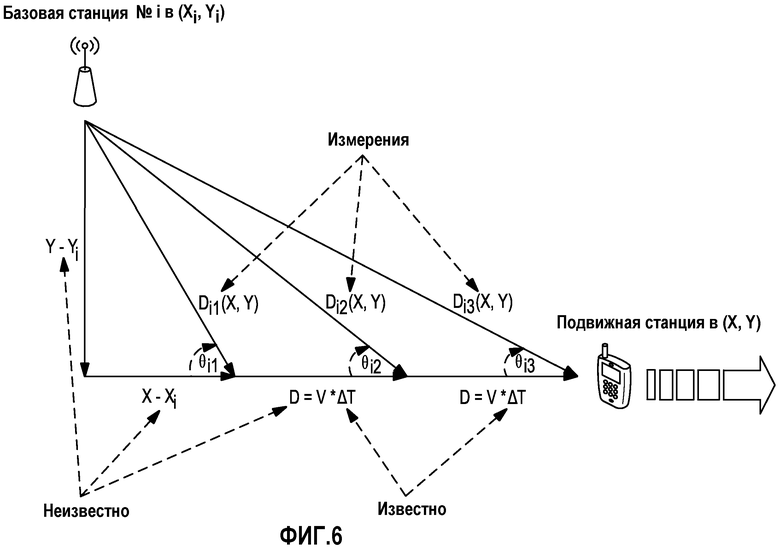
На фиг.6 приведен пример оценки скорости и доплеровской частоты подвижной станции.
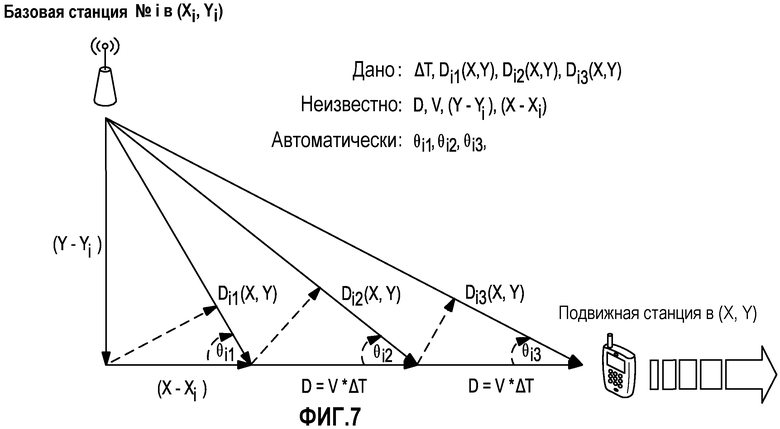
На фиг.7 приведен пример угла прихода сигнала (АОА) от отдельных базовых станций.
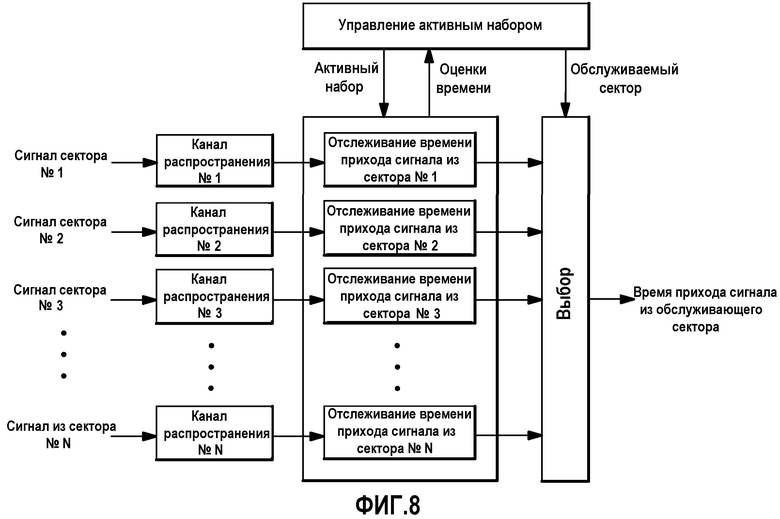
На фиг.8 приведен пример архитектуры многосекторного отслеживания времени.
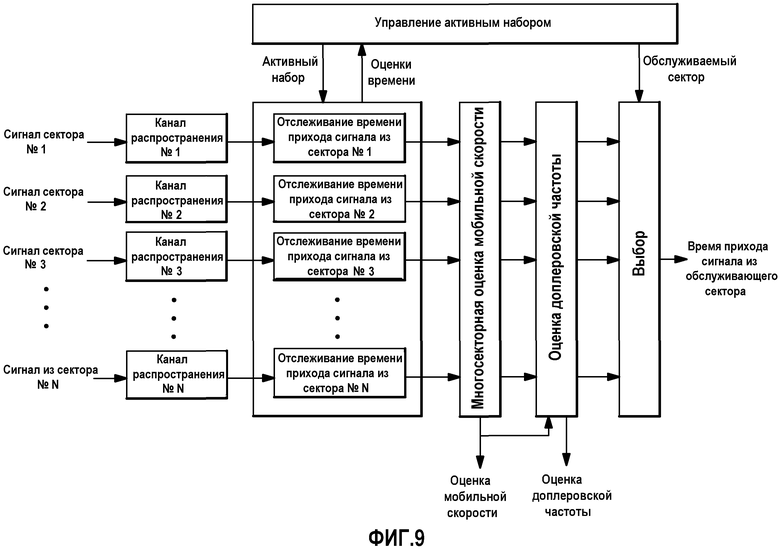
На фиг.9 приведен пример архитектуры многосекторной оценки скорости и доплеровской частоты подвижной станции.
На фиг.10 приведен пример схемы последовательности операций многосекторной оценки скорости и доплеровской частоты подвижной станции.
На фиг.11 приведен пример устройства, содержащего процессор, который осуществляет обмен данными с запоминающим устройством для выполнения процессов многосекторной оценки скорости и доплеровской частоты подвижной станции.
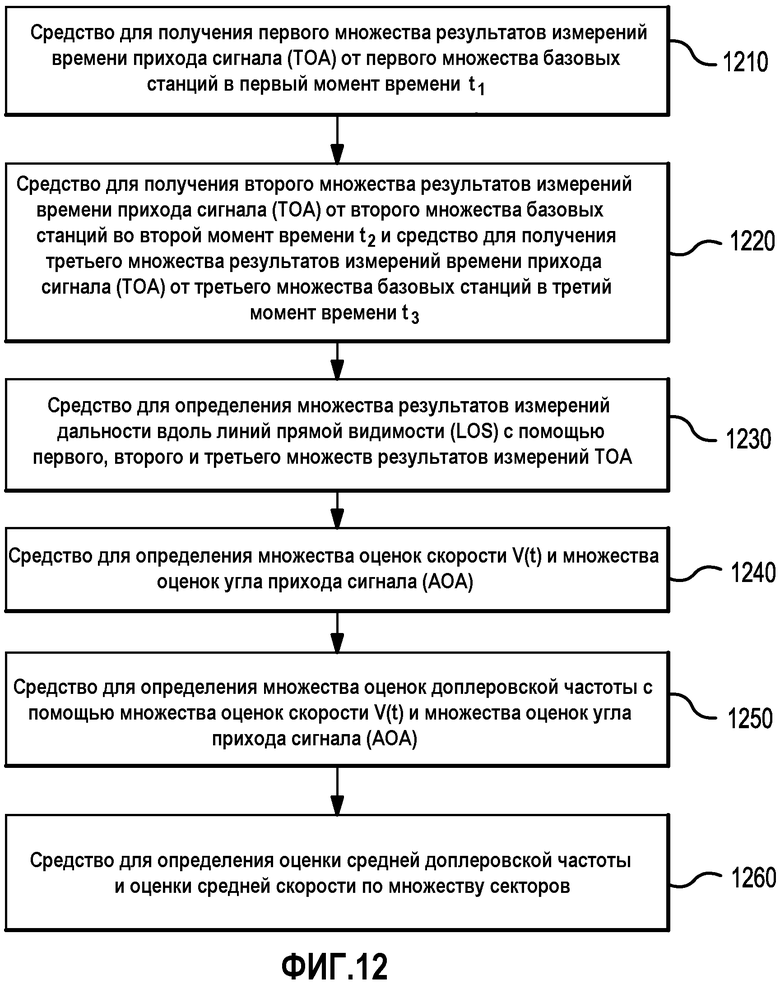
На фиг.12 приведен пример устройства 1200, подходящего для многосекторной оценки скорости и доплеровской частоты подвижной станции.
Подробное описание
Изложенное ниже подробное описание с использованием прилагаемых чертежей предназначено для описания различных вариантов осуществления настоящего изобретения и не предназначено для представления только тех вариантов осуществления, в которых может быть реализовано настоящее изобретение. Каждый вариант осуществления, описанный в настоящем изобретении, представлен попросту в качестве примера или иллюстрации настоящего изобретения и не обязательно должен рассматриваться в качестве предпочтительного или выгодного по сравнению с другими вариантами осуществления. Подробное описание содержит характерные детали с целью обеспечения надлежащего понимания настоящего изобретения. Однако специалистам понятно, что настоящее изобретение может быть реализовано и без этих характерных деталей. В отдельных случаях хорошо известные структуры и устройства изображены в виде блок-схем, чтобы избежать вуалирования целей настоящего изобретения. Аббревиатуры и прочая описательная терминология могут использоваться попросту для удобства и ясности и не ограничивают объем настоящего изобретения.
Несмотря на то что для упрощения объяснения методы показаны и описаны в виде ряда действий, следует понимать, что методы не ограничиваются порядком действий, поскольку некоторые действия в соответствии с одним или более вариантов осуществления могут выполняться в различном порядке и/или одновременно с другими действиями, показанными и описанными в настоящем изобретении. Например, специалистам будет ясно, что в одном из вариантов осуществления метод может быть изложен в виде последовательности взаимосвязанных состояний или событий, например, на диаграмме состояний. Кроме того, не все изображенные действия могут использоваться для реализации метода в соответствии с одним или более вариантов осуществления.
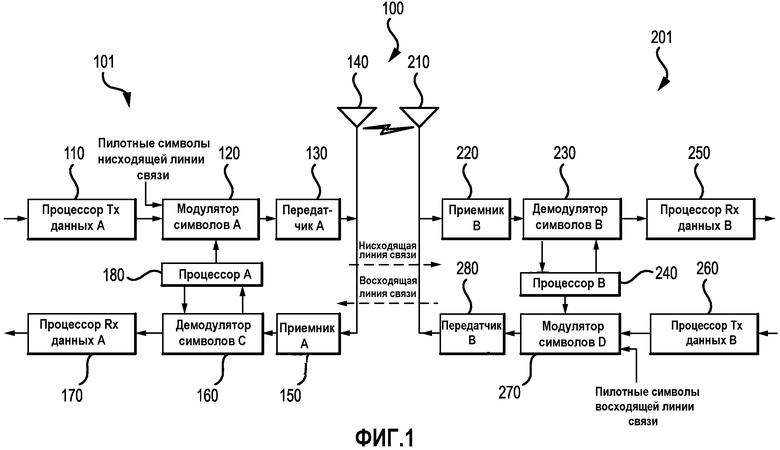
Фиг.1 - блок-схема, иллюстрирующая пример системы узла доступа/абонентской станции 100. Специалисту понятно, что изображенный на фиг.1 пример системы узла доступа/абонентской станции 100 может быть реализован в среде FDMA, среде OFDMA, среде CDMA, среде WCDMA, среде TDMA, среде SDMA или любой иной подходящей беспроводной среде.
Узел доступа/абонентская станция 100 содержит узел доступа 101 (известный также как базовая станция) и абонентскую станцию или UE 201 (известную также как устройство беспроводной связи или подвижная станция). На участке нисходящей линии связи узел доступа 101 (известный также как базовая станция) содержит процессор передаваемых (ТХ) данных А 110, который осуществляет прием, форматирование, кодирование, перемежение и модуляцию (или преобразование символов) данных трафика и выдает символы модуляции (известные также как символы данных). Процессор ТХ данных А 110 осуществляет обмен данными с модулятором символов А 120. Модулятор символов А 120 осуществляет прием и обработку символов данных и выдает поток символов. В одном варианте осуществления модулятор символов А 120 осуществляет обмен данными с процессором А 180, который выдает информацию о конфигурации. Модулятор символов А 120 осуществляет обмен данными с передатчиком (TMTR) А 130. Модулятор символов А 120 объединяет символы данных и пилотные символы нисходящей линии связи и выдает их в передатчик А 130.
Каждый передаваемый символ может быть символом данных, пилотным символом нисходящей линии связи или нулевым сигналом. Пилотные символы нисходящей линии связи могут отправляться непрерывно в каждом периоде передачи символов. В одном варианте осуществления пилотные символы нисходящей линии связи подвергаются мультиплексированию с частотным разделением каналов (FDM). В другом варианте осуществления пилотные символы нисходящей линии связи подвергаются мультиплексированию с ортогональным частотным разделением каналов (OFDM). Еще в одном варианте осуществления пилотные символы нисходящей линии связи подвергаются мультиплексированию с кодовым разделением каналов (CDM). В одном варианте осуществления передатчик А 130 принимает поток символов и преобразует его в один или более аналоговых сигналов, а затем нормирует, например, усиливает, фильтрует и/или преобразует с повышением частоты эти аналоговые сигналы для формирования аналогового сигнала нисходящей линии связи, подходящего для беспроводной передачи. Далее аналоговый сигнал нисходящей линии связи передается через антенну 140.
На участке нисходящей линии связи UE 201 содержит антенну 210 для приема аналогового сигнала нисходящей линии связи и ввода аналогового сигнала нисходящей линии связи в приемник (RCVR) В 220. В одном варианте осуществления приемник В 220 нормирует, например, фильтрует, усиливает и преобразует с понижением частоты этот аналоговый сигнал нисходящей линии связи в первый «нормированный» сигнал. Затем осуществляется дискретизация указанного первого «нормированного» сигнала. Приемник В 220 осуществляет обмен данными с демодулятором символов В 230. Демодулятор символов В 230 демодулирует первый «нормированный» и «дискретизованный» сигнал (известный также как символы данных), снимаемый с выхода приемника В 220. Специалисту понятно, что альтернативой является осуществление процесса дискретизации в демодуляторе сигналов В 230. Демодулятор символов В 230 осуществляет обмен данными с процессором В 240. Процессор В 240 принимает пилотные символы нисходящей линии связи с демодулятора символов В 230 и выполняет оценку канала по пилотным символам нисходящей линии связи. В одном варианте осуществления оценка канала является процессом определения характеристик текущей среды распространения. Демодулятор символов В 230 принимает от процессора В 240 оценку частотной характеристики для участка нисходящей связи. Демодулятор символов В 230 выполняет демодуляцию данных по символам данных для получения оценок символов данных по нисходящему каналу. Оценки символов данных по нисходящему каналу являются оценками символов данных, которые были переданы. Демодулятор символов В 230 также осуществляет обмен данными с процессором принимаемых (RX) данных В 250.
Процессор RX данных В 250 принимает оценки символов данных по нисходящему каналу с демодулятора символов В 230 и, например, демодулирует (т.е. восстанавливает символы), перемежает и/или декодирует оценки символов данных по нисходящему каналу для восстановления данных трафика. В одном варианте осуществления обработка демодулятором символов В 230 и процессором RX данных В 250 является дополнительной к обработке модулятором символов А 120 и процессором ТХ данных А 110 соответственно.
На участке восходящего канала связи UE 201 содержит процессор ТХ данных В 260. Процессор ТХ данных В 260 принимает и обрабатывает данные трафика для выдачи символов данных. Процессор ТХ данных В 260 осуществляет обмен данными с модулятором символов D 270. Модулятор символов D 270 принимает символы данных и объединяет их с пилотными символами восходящей линии связи, осуществляет модуляцию и выдает поток символов. В одном варианте осуществления модулятор символов D 270 осуществляет обмен данными с процессором В 240, выдающим информацию о конфигурации. Модулятор символов D 270 осуществляет обмен данными с передатчиком В 280.
Каждый передаваемый символ может быть символом данных, пилотным символом восходящей линии связи или нулевым сигналом. Пилотные символы восходящей линии связи могут отправляться непрерывно в каждом периоде передачи символов. В одном варианте осуществления пилотные символы восходящей линии связи подвергаются мультиплексированию с частотным разделением каналов (FDM). В другом варианте осуществления пилотные символы восходящей линии связи подвергаются мультиплексированию с ортогональным частотным разделением каналов (OFDM). Еще в одном варианте осуществления пилотные символы восходящей линии связи подвергаются мультиплексированию с кодовым разделением каналов (CDM). В одном варианте осуществления передатчик В 280 принимает поток символов и преобразует его в один или более аналоговых сигналов, а затем нормирует, например, усиливает, фильтрует и/или преобразует с повышением частоты эти аналоговые сигналы для формирования аналогового сигнала восходящей линии связи, подходящего для беспроводной передачи. Далее аналоговый сигнал восходящей линии связи передается через антенну 210.
Аналоговый сигнал восходящей линии связи с UE 201 принимается антенной 140 и обрабатывается приемником А 150 для получения дискретных значений. В одном варианте осуществления приемник А 150 нормирует, например, фильтрует, усиливает и преобразует с понижением частоты этот аналоговый сигнал восходящей линии связи во второй «нормированный» сигнал. Затем осуществляется дискретизация указанного второго «нормированного» сигнала. Приемник А 150 осуществляет обмен данными с демодулятором символов С 160. Специалисту понятно, что альтернативой является осуществление процесса дискретизации в демодуляторе сигналов С 160. Демодулятор символов С 160 выполняет демодуляцию данных по символам данных для получения оценок символов данных по восходящему каналу, а затем выдает пилотные символы данных восходящего канала и оценки символов данных по восходящему каналу в процессор RX данных А 170. Оценки символов данных по восходящему каналу являются оценками символов данных, которые были переданы. Процессор RX данных А 170 обрабатывает оценки символов данных по восходящему каналу для восстановления данных трафика, переданных устройством беспроводной связи 201. Демодулятор символов С 160 также осуществляет обмен данными с процессором А 180. Процессор А 180 выполняет оценку канала по каждому активному терминалу, осуществляющему передачу по восходящему каналу. В одном варианте осуществления множество терминалов могут параллельно передавать пилотные сигналы на участке восходящей линии связи в своих соответствующих заданных наборах пилотных поддиапазонов, причем наборы пилотных поддиапазонов могут располагаться последовательно.
Процессор А 180 и процессор В 240 направляют (т.е. контролируют, координируют или управляют и пр.) функционирование в узле доступа 101 (известном также как базовая станция) и в UE 201 соответственно. В одном варианте осуществления любой из процессоров - А 180 или В 240 - или оба вместе связаны с одним или более блоков памяти (не показаны) для запоминания программных кодов и/или данных. В одном варианте осуществления любой из процессоров - А 180 или В 240 - или оба вместе выполняют вычисления для получения оценок частоты и импульсной характеристики для участка восходящей линии связи и участка нисходящей линии связи соответственно.
В одном варианте осуществления система узла доступа/UE 100 является системой с многостанционным доступом. Для системы с многостанционным доступом (например, FDMA, OFDMA, CDMA, TDMA, SDMA и т.д.) множество терминалов осуществляют одновременную передачу на участке восходящей линии связи. В одном варианте осуществления для системы с многостанционным доступом пилотные поддиапазоны могут совместно использоваться различными терминалами. Методы оценки канала используются в тех случаях, когда пилотные поддиапазоны для каждого терминала перекрывают всю рабочую полосу (возможно, за исключением краев полосы). Такая структура пилотных поддиапазонов целесообразна для получения частотного разнесения для каждого терминала.
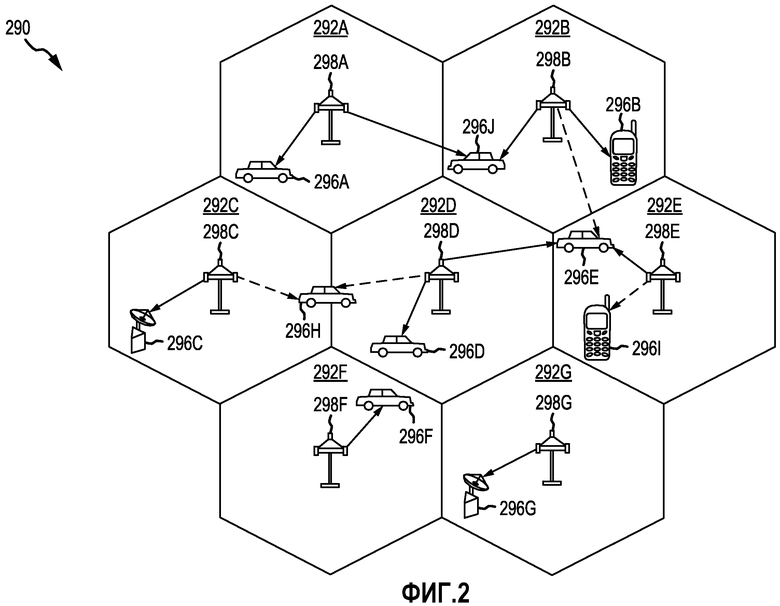
На фиг.2 приведен пример системы беспроводной связи 290, поддерживающей множество пользователей. На фиг.2 позиционные номера 292А и 292G относятся к сотам, позиционные номера 298А и 298G относятся к базовым станциям (BS) или базовым приемопередающим станциям (BTS), а позиционные номера 296А и 296J относятся к абонентским станциям (UE) доступа. Размер соты может варьироваться. Любой из множества алгоритмов и способов может использоваться для планирования передач в системе 290. Система 290 обеспечивает связь для некоторого числа сот 292А - 292G, каждая из которых обслуживается соответствующей базовой станцией 298А-298G соответственно. Межсистемная передача обслуживания (т.е. передача с использованием технологии обмена информацией между точками радиодоступа (IRAT)) осуществляется при передаче текущего вызова между ячейкой одной сети и ячейкой другой сети. Такая передача может происходить, например, между узлом WCDMA и узлом GSM.
Оценка скорости и доплеровской частоты подвижной станции важна для улучшения характеристик беспроводной системы по различным аспектам, включая демодуляцию данных, оптимизацию передачи обслуживания, регулирование мощности и др.
Традиционные конструктивные решения для оценки скорости и доплеровской частоты основаны на сигналах от отдельных базовых станций и поэтому ограничены по своим характеристикам, особенно, когда подвижная станция находится в условиях замираний или на краю соты, когда качество сигнала обслуживаемого сектора является наихудшим. Например, такие существующие способы оценки скорости подвижной станции включают в себя одно или более из следующего: (1) получение оценки максимальной доплеровской частоты, которая является заведомо ненадежной, когда подвижная станция находится в условиях замираний, (2) контроль степени коммутационного разнесения, основанный на наличии априорного знания распределения замираний, (3) измерение колебания уровня (мощности) принятого сигнала, который(ая) чувствителен(а) к межсимвольным помехам за исключением случаев использования требующего большого объема вычислений многомерного статистического анализа, и (4) использование других способов, основанных на частоте пересечений уровня, автокорреляции характеристик каналов, анализе формы сигнала и др.
Хотя в приемниках системы беспроводной связи делались попытки использовать разнесенный прием сигналов по различным каналам для демодуляции данных, а не для отслеживания времени или оценки скорости и доплеровской частоты подвижной станции. Все перечисленные выше существующие способы основаны на сигналах от отдельных базовых станций и поэтому имеют ограничения по своим характеристикам, особенно, когда подвижная станция находится в условиях замираний или на краю соты, когда качество сигнала обслуживаемого сектора является наихудшим.
В настоящем изобретении делается попытка повысить точность и надежность оценки скорости и доплеровской частоты подвижной станции, а также улучшить соответствующие аспекты характеристик системы при наличии сигналов из множества секторов. В настоящем изобретении описан многосекторный метод, который включает в себя одно или более из следующего: (1) по возможности использование разнесенного приема сигналов в качестве традиционного метода в конструктивном решении приемника системы беспроводной связи для улучшения характеристик и для оценки скорости и доплеровской частоты подвижной станции; (2) использование данных о времени прихода сигнала (ТОА); (3) учет знания времени передачи сигнала прямой линии связи на синхронных базовых станциях, поэтому расстояния между подвижной станцией и базовыми станциями оцениваются с помощью многосекторного отслеживания времени; (4) оценка скорости подвижной станции по непрерывному измерению расстояния между подвижной станцией и базовой станцией; (5) оценка скорости подвижной станции по сигналам из различных секторов и объединение этих сигналов по секторам для повышения точности и надежности; и (6) измерение угла прихода сигнала (АОА) прямой линии связи в подвижной станции от отдельных базовых станций и получение доплеровской частоты для каждой из отдельных базовых станций с той же точностью и надежностью, что и для оценки скорости подвижной станции.
Как описано в настоящем изобретении, метод многосекторной оценки скорости и доплеровской частоты улучшает точность и надежность оценки скорости и доплеровской частоты подвижной станции и соответствующие аспекты характеристик системы с помощью сигналов из множества секторов без необходимости использования дополнительного оборудования, такого как, например, приемник Глобальной системы определения местоположения (GPS), либо заголовков сигнальной информации, либо повышения вычислительной сложности. В указанном методе оценки в настоящем изобретении используются сигналы из множества секторов для совместной оценки скорости и доплеровской частоты подвижной станции, чтобы избежать ограничений по точности и надежности оценок скорости и доплеровской частоты подвижной станции с помощью сигналов из одного сектора или из множества секторов.
В одном варианте осуществления измерения скорости подвижной станции, основанные на времени прихода сигнала или других параметрах сигнала от множества соседних базовых станций к подвижной станции, не являются взаимно независимыми.
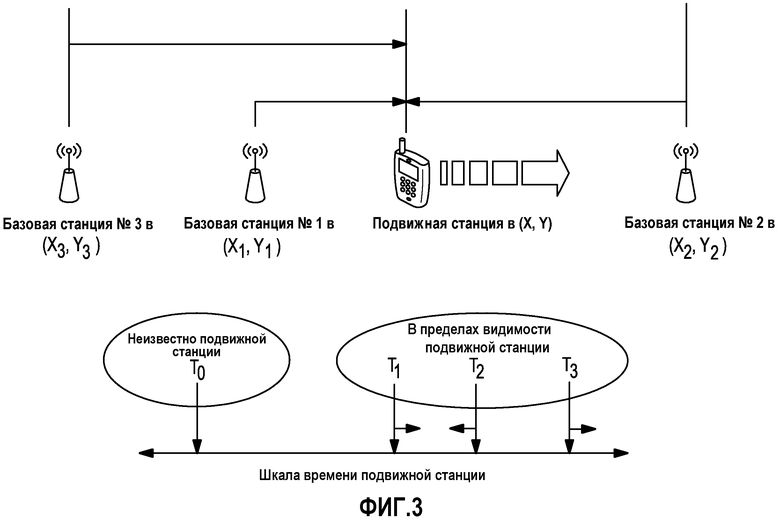
На фиг.3 приведен пример корреляции по времени прихода сигнала для одномерного (1-D) географического сценария. Пример одномерного (1-D) географического сценария на фиг.3 демонстрирует корреляцию измерений.
Например, по мере того, как подвижная станция перемещается в направлении базовой станции № 2, значения времени прихода сигнала Т1, Т2 и Т3 изменяются на ту же величину, в то время как перемены знака известны из непрерывных измерений. Погрешность измерения величины Т1, Т2 и Т3 может быть легко уменьшена путем усреднения по всем трем измерениям, например, с помощью взвешивания мощности сигнала для повышения точности. В наихудшем случае, когда обслуживаемый сектор временно находится вне зоны видимости с подвижной станции из-за затенения сигнала, время прихода сигнала в нем все-таки может оцениваться путем сравнения со значениями времени прихода сигнала в других секторах.
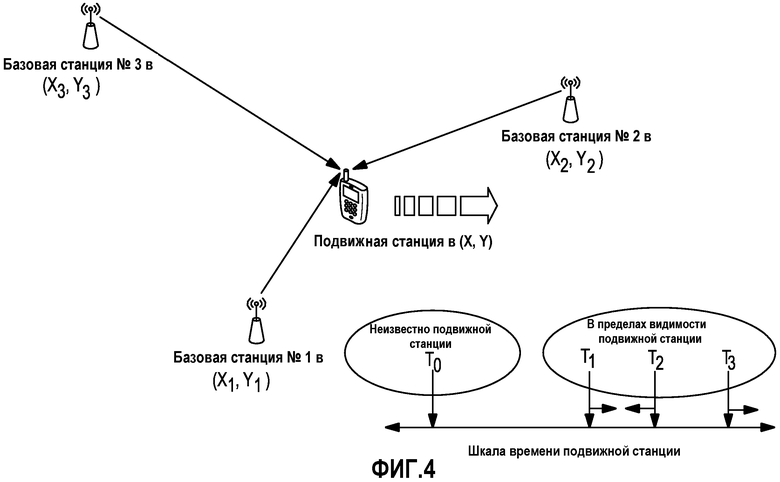
На фиг.4 приведен пример корреляции по времени прихода сигнала для двумерного (2-D) географического сценария. В соответствии с фиг.4, при переходе от упрощенного одномерного (1-D) сценария к более реальному двумерному (2-D) сценарию корреляция по времени прихода сигнала от множества соседних базовых станций не столь очевидна. В отличие от 1-D примера, значения времени прихода сигнала от множества базовых станций в 2-D сценарии нелегко объединять по приемникам подвижного объекта для повышения точности. Сложность состоит в том, что значения времени прихода сигнала дают приемнику подвижного объекта всего лишь одномерное представление о двумерной ситуации.
На фиг.5 приведен пример сценария линии прямой видимости (LOS) по сравнению со сценарием линии перемещения (LOM). Анализ сигнала в одном секторе приводит, в основном, к получению свойств линии прямой видимости (LOS), таких как доплеровская частота, а не свойств линии перемещения (LOM), таких как скорость подвижной станции, отличающаяся углом прихода сигнала (АОА) θ, как показано на фиг.5, если только в подвижной станции не используется разнесение антенн. Свойства LOS, как правило, характерны для измеряемого сектора, в то время как свойства LOM обладают преимуществом, состоящим в том, что они едины по секторам, что позволяет объединять сигналы для повышения точности и надежности.
Метод многосекторной оценки скорости и доплеровской частоты включает в себя следующие два этапа: (1) оценка свойств LOM с использованием сигналов из множества соседних секторов для повышения точности и надежности и (2) получение свойств LOS по более точно оцененным свойствам LOM для улучшения характеристик мобильной беспроводной системы, включая демодуляцию данных, регулирование мощности, сокращение передачи обслуживания и т.д. Весьма желательно и возможно, чтобы точность и надежность оценок скорости и доплеровской частоты подвижной станции превышала искусственное ограничение качества сигнала из одного сектора, основанное на совместном верхнем ограничении, которое накладывается множеством соседних секторов, находящихся в пределах видимости подвижных станций.
В одном варианте осуществления метод многосекторной оценки скорости и доплеровской частоты включает в себя одно или более из следующего: (1) разнесенный прием сигналов при оценке скорости и доплеровской частоты подвижной станции, (2) измерение подвижными станциями времени прихода сигнала (ТОА) по времени из множества секторов, (3) многосекторное отслеживание времени передачи сигнала прямой линии связи на синхронных базовых станциях для оценки расстояния, (4) непрерывное измерение расстояния между подвижной станцией и базовой станцией для оценки скорости подвижной станции, (5) объединение оценок скорости подвижной станции по сигналам различных секторов для повышения точности и надежности, и (6) измерения угла прихода сигнала (АОА) из прямой линии связи в подвижной станции от отдельных базовых станций для получения доплеровской частоты с той же точностью и надежностью, что и для оценки скорости подвижной станции.
В одном варианте осуществления измерения ТОА в подвижной станции от различных базовых станций не являются независимыми. Для упрощенного 1-D сценария с тремя секторами, как показано на фиг.3, ограничение по Т1, Т2 и Т3 приведено в уравнении 1. Знак для ΔТ1, ΔТ2 и ΔТ3 может определяться путем непрерывного измерения.
|ΔТ1|=|ΔТ2|=|ΔТ3| (1)
Ограничение при переходе от 1-D сценария к 2-D сценарию приведено в уравнении 2.

где

Присутствующая в уравнении 2 константа позволяет выполнять постоянную калибровку по эталонному времени - времени передачи сигнала прямой линии связи для развертывания систем синхронной связи - по базовым станциям по сигналам от соседних базовых станций, находящихся в пределах видимости подвижной станции, не основываясь при этом на качестве сигнала от какой-либо одной базовой станции.
При наличии времени передачи по прямой линии связи на базовых станциях при синхронной связи вместе с измерениями ТОА, уже проведенными в подвижной станции с целью отслеживания времени, отсюда следует, что значения дальности вдоль LOS между подвижной станцией и отдельными базовыми станциями могут быть вычислены с помощью уравнения 4, в котором с - скорость электромагнитных волн, а T i и T 0 - измерения времени.
D i =c(T i -T 0 ) (4)
При проведении периодических обновлений значений дальности вдоль LOS между подвижной станцией и отдельными базовыми станциями скорость и доплеровская частота подвижной станции могут непрерывно контролироваться, как показано на фиг.6. На фиг.6 приведен пример оценки скорости и доплеровской частоты подвижной станции с использованием уравнений 5-9.
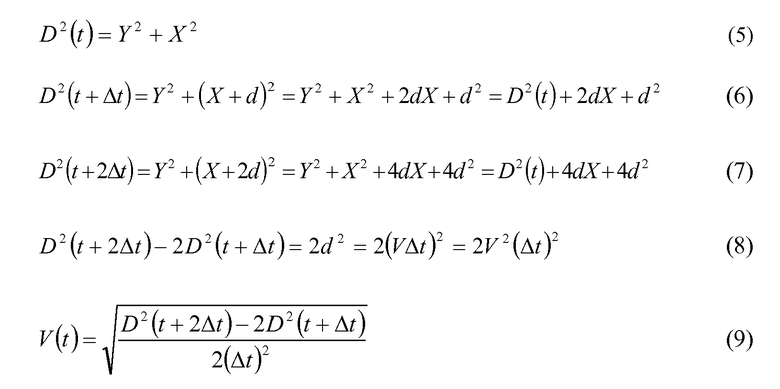
Как показано выше в уравнениях 5-9, каждые три последовательных измерения дальности вдоль LOS между подвижной станцией и отдельными базовыми станциями дают оценку скорости подвижной станции, которая считается одинаковой для базовых станций. В уравнениях 5-9 Δt - это следующее приращение времени с момента времени t, а D - измерение дальности вдоль LOS. Однако измерения АОА для отдельных базовых станций будут различными и будут изменяться при перемещении подвижной станции, как показано на фиг.7. На фиг.7 приведен пример угла прихода сигнала (АОА) от отдельных базовых станций. А измерения АОА могут быть дополнительно получены с помощью уравнений 10-12.
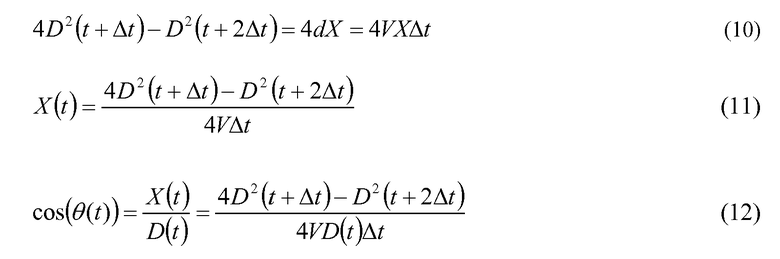
Получающаяся в результате оценка доплеровской частоты приведена в уравнении 13.

Аналогичным образом, в уравнениях 10-13 Δt - следующее приращение времени с момента времени t, D - измерение дальности вдоль LOS, а λ - длина волны передаваемого сигнала.
К преимуществам многосекторного метода оценки скорости и доплеровской частоты подвижной станции для системы беспроводной связи в системах синхронной связи можно отнести (1) более высокую точность и надежность оценки скорости подвижной станции при использовании наличия сигнала от множества базовых станций, (2) более высокую точность и надежность оценки доплеровской частоты подвижной станции, полученной по оценке скорости подвижной станции, (3) лучшие характеристики по различным аспектам функционирования системы в зависимости от знания скорости или доплеровской частоты подвижной станции, и (4) очень низкую дополнительную сложность при использовании типовых имеющихся методов отслеживания времени в прямой линии связи в подвижной станции, которые могут быть показаны при сравнении фиг.8 и 9.
На фиг.8 приведен пример архитектуры многосекторного отслеживания времени. На фиг.9 приведен пример архитектуры многосекторной оценки скорости и доплеровской частоты подвижной станции.
Специалисту понятно, что описанный здесь многосекторный метод оценки скорости и доплеровской частоты подвижной станции в системах синхронной связи и его реализации могут применяться в любых синхронных беспроводных мобильных системах связи, например, помимо прочего, в системе сверхширокополосной подвижной связи (UMB).
На фиг.10 приведен пример схемы последовательности операций многосекторной оценки скорости и доплеровской частоты подвижной станции. В блоке 1010 осуществляется получение первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени t1. Измерения времени прихода сигнала (ТОА) - это измерения времени прихода сигнала (ТОА) в прямой линии связи, причем прямая линия связи означает направление от базовой станции к подвижной станции. В одном примере для получения результатов измерений ТОА используется приемник (такой как изображенный на фиг.1 приемник 220). Первое множество базовых станций состоит, по меньшей мере, из двух базовых станций. В одном варианте осуществления базовые станции синхронны друг с другом. В одном варианте осуществления измерения времени прихода сигнала (ТОА) синхронны и определяются из Глобальной системы определения местоположения (GPS). В одном варианте осуществления измерения ТОА получают по множеству секторов.
После блока 1010 в блоке 1020 осуществляется получение второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени t2, отличный от первого момента времени t 1, и получение третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени t 3, отличный от второго момента времени t 2 и первого момента времени t 1. В одном примере для получения результатов измерений ТОА используется приемник (такой как изображенный на фиг.1 приемник 220). Измерения времени прихода сигнала (ТОА) - это измерения времени прихода сигнала (ТОА) в прямой линии связи, причем прямая линия связи означает направление от базовой станции к подвижной станции. В одном варианте осуществления второе и третье множества базовых станций состоят из базовых станций, отличных от базовых станций в первом множестве базовых станций. В одном варианте осуществления первое, второе и третье множества базовых станций идентичны. В одном варианте осуществления базовые станции синхронны друг с другом. В одном варианте осуществления измерения времени прихода сигнала (ТОА) синхронны и их получают из GPS. В одном варианте осуществления измерения ТОА получают по множеству секторов. Специалисту понятно, что этап в блоке 1020 может повторяться в дополнительные различные моменты времени (например, t 4 , t 5 , t 6 и т.д.) для получения дополнительных результатов измерений ТОА от дополнительных базовых станций.
После блока 1020 в блоке 1030 осуществляется определение множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА. В одном варианте осуществления множество результатов измерений дальности вдоль LOS определяется с помощью D i =c(T i -T 0 ), где с - скорость электромагнитных волн, T i - один из моментов времени t 1 , t 2 , или t 3 , а T 0 соответствует времени передачи. В одном варианте осуществления множество результатов измерений дальности вдоль LOS соответствует, по меньшей мере, двум различным секторам.
После блока 1030 в блоке 1040 осуществляется определение множества оценок скорости V(t) и множества оценок угла прихода сигнала (АОА) с использованием множества результатов измерений дальности вдоль LOS. В одном варианте осуществления оценка скорости определяется следующим образом:
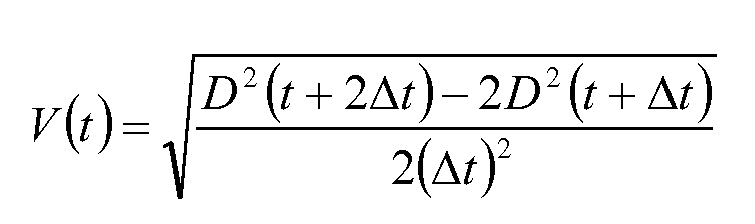
где Δt - следующее приращение времени с момента времени t, а D - измерение дальности вдоль LOS. В одном варианте осуществления оценка угла прихода сигнала (АОА) определяется следующим образом:
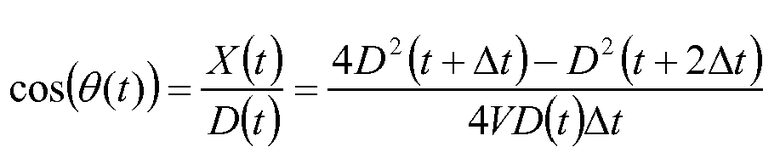
Аналогичным образом, Δt - следующее приращение времени с момента времени t, а D - измерение дальности вдоль LOS. X(t) - это ось х, изображенная на фиг.6. Множество оценок скорости V(t) соответствует, по меньшей мере, двум различным секторам. Множество оценок угла прихода сигнала (АОА) соответствует, по меньшей мере, двум различным секторам.
После блока 1040 в блоке 1050 осуществляется определение множества оценок доплеровской частоты с использованием множества оценок скорости V(t) и множества оценок угла прихода сигнала (АОА). Специалисту понятно, что оценки доплеровской частоты определяются для множества секторов с использованием соответствующего множества оценок скорости V(t) и множества оценок угла прихода сигнала (АОА). В одном варианте осуществления оценка доплеровской частоты определяется следующим образом:

где Δt - следующее приращение времени с момента времени t, D - измерение дальности вдоль LOS, а λ - длина волны передаваемого сигнала.
После блока 1050 в блоке 1060 осуществляется определение оценки средней доплеровской частоты и оценки средней скорости по множеству секторов. В одном примере усреднение выполняется процессором, таким как процессор RX данных 250, показанный на фиг.1. В одном варианте осуществления усреднение взвешивается. В одном варианте осуществления взвешивание включает в себя использование весовых коэффициентов, которые основаны на уровне (мощности) принятых сигналов, связанных с измерениями времени прихода сигнала (ТОА). Специалисту понято, что метод оценки скорости и доплеровской частоты может применяться в любой беспроводной системе связи в синхронной системе. В одном варианте осуществления в беспроводной системе связи используется один из следующих методов многостанционного доступа: многостанционный доступ с временным разделением (TDMA), многостанционный доступ с частотным разделением (FDMA), многостанционный доступ с кодовым разделением (CDMA) или многостанционный доступ с ортогональным частотным разделением (OFDMA).
Специалисту понятно, что порядок этапов, описанных в примере схемы последовательности операций на фиг.10, может быть изменен в пределах сущности и объема настоящего изобретения. Кроме того, специалисту понятно, что изображенные на схеме последовательности операций этапы не являются исключительными, и могут быть введены другие этапы, либо один или более этапов в примере схемы последовательности операций могут быть исключены в пределах сущности и объема настоящего изобретения.
Специалисты также понимают, что различные иллюстративные элементы, логические блоки, модули и/или этапы алгоритма, описанные в связи с рассматриваемыми примерами, могут быть реализованы в виде электронной аппаратуры, встроенного программного обеспечения, компьютерного программного обеспечения или их совокупности. Для того чтобы ясно проиллюстрировать взаимозаменяемость аппаратуры встроенного программного обеспечения и компьютерного программного обеспечения, различные иллюстративные элементы, логические блоки, модули и/или этапы алгоритма описаны выше, в основном, с точки зрения их функций. Реализованы ли указанные функции в аппаратуре, встроенном программном обеспечении или компьютерном программном обеспечении, зависит от конкретного применения и конструктивных ограничений, накладываемых на систему в целом. Специалисты в данной области могут реализовать описанные функции различными способами для каждого конкретного применения, но такие решения по реализации не должны истолковываться как выходящие за рамки объема или сущности настоящего изобретения.
Например, касательно аппаратной реализации, блоки обработки могут быть реализованы в одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, прочих электронных блоков, предназначенных для выполнения описанных в настоящем документе функций, либо их совокупности. Касательно программного обеспечения, реализация может быть осуществлена с помощью модулей (например, процедур, функций и т.д.), выполняющих описанные в настоящем документе функции. Программные коды могут храниться в блоках памяти и исполняться процессором. Кроме того, различные иллюстративные структурные диаграммы, логические блоки, модули, и/или этапы алгоритмов, описанные в настоящем документе, могут быть также запрограммированы в виде машиночитаемых команд, записанных на любом известном машиночитаемом носителе информации или реализованных в любом известном программном продукте.
В одном или более примеров описанные в настоящем документе этапы или функции могут быть реализованы в аппаратном обеспечении, компьютерном программном обеспечении, встроенном программном обеспечении или в любой их совокупности. При реализации в компьютерном программном обеспечении эти функции могут храниться или передаваться в виде одной или более команд или кода, записанных на машиночитаемом носителе информации. Машиночитаемый носитель информации включает в себя как компьютерные носители информации, так и среды передачи данных, содержащие любую среду, облегчающую перенос компьютерной программы из одного места в другое. Носителями информации могут быть любые доступные носители информации, доступ к которым может быть осуществлен с компьютера. В качестве примеров, а не ограничений можно назвать оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), компакт-диск (CD-ROM), либо иной накопитель на оптических дисках, накопитель на магнитных дисках или иное магнитное запоминающее устройство, либо любой другой носитель информации, который может использоваться для переноса или хранения требуемого кода программы в виде команд или структур данных и доступ к которому может быть осуществлен с компьютера. Кроме того, любое соединение, строго говоря, является машиночитаемым носителем информации. Например, если программное обеспечение передается с веб-сайта, сервера или из иного удаленного источника с помощью коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL), либо с помощью беспроводных устройств, таких как инфракрасное, радиочастотное и микроволновое, то коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводные устройства, такие как инфракрасное, радиочастотное и микроволновое, входят в определение носителя информации. Используемый в настоящем документе термин «диск» включает компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий магнитный диск и диск blue-ray, при этом в одних дисках воспроизведение данных осуществляется магнитным способом, а в других дисках воспроизведение данных осуществляется оптическим способом с помощью лазеров. Совокупности вышеупомянутых носителей информации также должны подпадать под определение машиночитаемого носителя информации.
В одном примере иллюстративные элементы, структурные диаграммы, логические блоки, модули, и/или этапы алгоритмов, описанные в настоящем документе, реализуются или исполняются с помощью одного или более процессоров. В одном варианте осуществления процессор связан с запоминающим устройством, которое хранит данные, метаданные, команды программ и т.д. для исполнения процессором с целью реализации или осуществления различных структурных диаграмм, логических блоков и/или модулей, описанных в настоящем документе. На фиг.11 изображен пример устройства 1100, содержащего процессор 1110, который осуществляет обмен информацией с запоминающим устройством 1120 для выполнения процесса многосекторной оценки скорости и доплеровской частоты. В одном примере устройство 1100 используется для реализации алгоритма, изображенного на фиг.10. В одном варианте осуществления запоминающее устройство 1120 расположено внутри процессора 1110. В другом варианте осуществления запоминающее устройство 1120 расположено вне процессора 1110. В одном варианте осуществления процессор содержит схему для реализации или осуществления различных структурных диаграмм, логических блоков и/или модулей, описанных в настоящем документе.
На фиг.12 приведен пример устройства 1200, подходящего для многосекторной оценки скорости и доплеровской частоты. В одном варианте осуществления устройство 1200 реализуется, по крайней мере, одним процессором, содержащим один или более модулей, которые настроены на обеспечение различных аспектов многосекторной оценки скорости и доплеровской частоты, как описано в настоящем документе в блоках 1210, 1220, 1230, 1240, 1250 и 1260. Например, каждый модуль содержит аппаратное обеспечение, компьютерное программное обеспечение, встроенное программное обеспечение или любую их совокупность. В одном варианте осуществления устройство 1200 реализуется, по крайней мере, одним запоминающим устройством, которое осуществляет обмен информацией, по крайней мере, с одним процессором.
Устройство и способ для оценки скорости и доплеровской частоты подвижной станции, содержащей получение первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени; получение второго и третьего множеств результатов измерений времени прихода сигнала (ТОА) от второго и третьего множеств базовых станций во второй и третий моменты времени; определение множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА; определение множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS; определение множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок АОА; и использование процессора для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов. 4 н. и 26 з.п. ф-лы, 12 ил.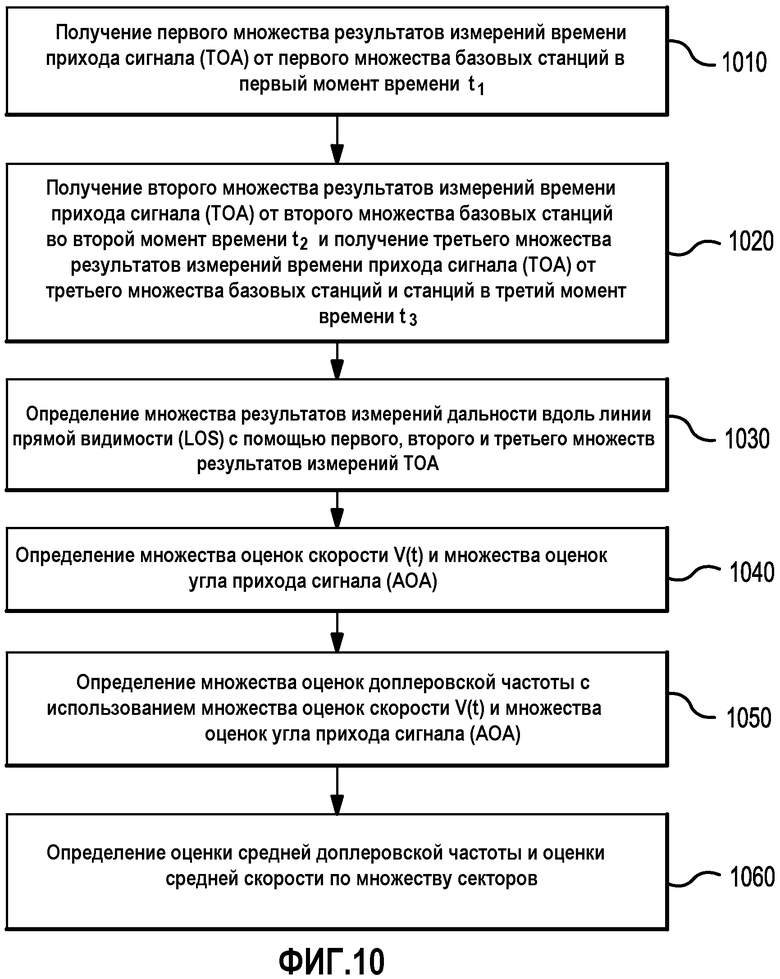
1. Способ оценки скорости и доплеровской частоты в системе беспроводной связи, содержащий
использование приемника для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени;
использование приемника для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени;
использование приемника для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени;
определение множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА;
определение множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS;
определение множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и
использование процессора для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
2. Способ по п.1, дополнительно содержащий определение оценки средней скорости по множеству секторов.
3. Способ по п.2, в котором первое, второе и третье множества базовых станций синхронны друг с другом.
4. Способ по п.3, в котором первое, второе и третье множества результатов измерений ТОА синхронны и их получают из Глобальной системы определения местоположения (GPS).
5. Способ по п.1, в котором оценку средней доплеровской частоты определяют с помощью весовых коэффициентов.
6. Способ по п.5, в котором весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
7. Способ по п.2, в котором оценку средней скорости определяют с помощью весовых коэффициентов.
8. Способ по п.7, в котором весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
9. Способ по п.1, в котором приемник и процессор являются компонентами системы беспроводной связи.
10. Способ по п.9, в котором в системе беспроводной связи используют один из следующих методов многостанционного доступа: многостанционный доступ с временным разделением (TDMA), многостанционный доступ с частотным разделением (FDMA), многостанционный доступ с кодовым разделением (CDMA) или многостанционный доступ с ортогональным частотным разделением (OFDMA).
11. Подвижная станция, содержащая процессор и запоминающее устройство, причем запоминающее устройство содержит программный код, исполняемый процессором для осуществления следующего:
использования приемника для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени;
использования приемника для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени;
использования приемника для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени;
определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА;
определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS;
определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и
использования процессора для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
12. Подвижная станция по п.11, в которой запоминающее устройство дополнительно содержит программный код для нахождения оценки средней скорости по множеству секторов.
13. Подвижная станция по п.12, причем первое, второе и третье множества базовых станций синхронны друг с другом.
14. Подвижная станция по п.13, в которой первое, второе и третье множества результатов измерений ТОА синхронны и определяются из Глобальной системы определения местоположения (GPS).
15. Подвижная станция по п.11, в которой оценка средней доплеровской частоты определяется с использованием весовых коэффициентов.
16. Подвижная станция по п.15, в которой весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
17. Подвижная станция по п.12, в которой оценка средней скорости определяется с использованием весовых коэффициентов.
18. Подвижная станция по п.17, в которой весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
19. Подвижная станция по п.11, причем приемник и процессор являются компонентами подвижной станции.
20. Подвижная станция по п.19, в которой при получении первого, второго и третьего множеств результатов измерений ТОА используется один из следующих методов многостанционного доступа: многостанционный доступ с временным разделением (TDMA), многостанционный доступ с частотным разделением (FDMA), многостанционный доступ с кодовым разделением (CDMA) или многостанционный доступ с ортогональным частотным разделением (OFDMA).
21. Подвижная станция для оценки скорости и доплеровской частоты, содержащая
средство для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени;
средство для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени;
средство для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени;
средство для определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА;
средство для определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS;
средство для определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и
средство для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
22. Подвижная станция по п.21, дополнительно содержащая средство для определения оценки средней скорости по множеству секторов.
23. Подвижная станция по п.22, причем первое, второе и третье множества базовых станций синхронны друг с другом.
24. Подвижная станция по п.23, в которой первое, второе и третье множества результатов измерений ТОА синхронны и определяются из Глобальной системы определения местоположения (GPS).
25. Подвижная станция по п.21, в которой оценка средней доплеровской частоты определяется с помощью весовых коэффициентов.
26. Подвижная станция по п.25, в которой весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
27. Подвижная станция по п.22, в которой оценка средней скорости определяется с помощью весовых коэффициентов.
28. Подвижная станция по п.27, в которой весовые коэффициенты основаны на уровнях множества принятых сигналов, связанных с первым, вторым и третьим множествами результатов измерений ТОА.
29. Подвижная станция по п.21, в которой при получении первого, второго и третьего множеств результатов измерений ТОА используется один из следующих методов многостанционного доступа: многостанционный доступ с временным разделением (TDMA), многостанционный доступ с частотным разделением (FDMA), многостанционный доступ с кодовым разделением (CDMA) или многостанционный доступ с ортогональным частотным разделением (OFDMA).
30. Машиночитаемый носитель информации, имеющий компьютерную программу, содержащую команды, которая при выполнении ее, по меньшей мере, одним процессором приводит к оценке скорости и доплеровской частоты, причем компьютерная программа содержит
команды для получения первого множества результатов измерений времени прихода сигнала (ТОА) от первого множества базовых станций в первый момент времени;
команды для получения второго множества результатов измерений времени прихода сигнала (ТОА) от второго множества базовых станций во второй момент времени;
команды для получения третьего множества результатов измерений времени прихода сигнала (ТОА) от третьего множества базовых станций в третий момент времени;
команды для определения множества результатов измерений дальности вдоль линии прямой видимости (LOS) с помощью первого, второго и третьего множеств результатов измерений ТОА;
команды для определения множества оценок скорости и множества оценок угла прихода сигнала (АОА) с помощью множества результатов измерений дальности вдоль LOS;
команды для определения множества оценок доплеровской частоты с помощью множества оценок скорости и множества оценок угла прихода сигнала (АОА); и
команды для определения оценки средней доплеровской частоты по множеству секторов, причем первое, второе и третье множества результатов измерений ТОА получают по множеству секторов.
| Устройство для определения температуры кипения жидкостей | 1981 |
|
SU1081503A1 |
| ОПРЕДЕЛЕНИЕ СДВИГОВ ЧАСТОТЫ В СИСТЕМАХ СВЯЗИ | 1997 |
|
RU2195772C2 |
| УСТРОЙСТВО И СПОСОБ ПРИЕМА ДАННЫХ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2320083C2 |
| ПРИЕМНИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СЕТЕЙ СПУТНИКОВОЙ СВЯЗИ | 1996 |
|
RU2158935C2 |
| US 6331836 В1, 18.12.2001 | |||
| US 2007258408 А1, 08.11.2007. | |||

