Настоящая заявка испрашивает приоритет предварительной патентной заявки США №60/580811, озаглавленной «Time Synchronization Using Spectral Estimation» («Временная синхронизация с использованием спектральной оценки»), зарегистрированной 18 июня 2004 г.
Область техники
Настоящее изобретение в целом относится к связи, более конкретно к временной синхронизации в системе связи.
Уровень техники
Система связи множественного доступа может поддерживать связь для множества пользовательских терминалов посредством совместного использования имеющихся в распоряжении ресурсов системы (например, времени, частоты и/или мощности передачи). Каждый пользовательский терминал осуществляет связь с одной или более базовыми станциями посредством передаваемых сигналов по прямой и обратной линиям связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи от базовых станций к пользовательским терминалам, а обратная линия связи (или восходящая линия связи) относится к линии связи от терминалов к базовым станциям.
По обратной линии связи базовая станция может принимать сигналы, передаваемые от множества пользовательских терминалов. Передаваемый сигнал с каждого пользовательского терминала распространяется через разный набор сигнальных трактов. Сигнальные тракты для разных пользовательских терминалов обычно имеют разные коэффициенты передачи канала и задержки распространения. Следовательно, передаваемые сигналы с этих пользовательских терминалов могут поступать на базовую станцию в разные моменты времени относительно одного и того же времени начала передачи. Передаваемые сигналы могут создавать помехи по отношению друг к другу, если они выровнены по времени надлежащим образом на базовой станции. Эти помехи могут неблагоприятно воздействовать на возможность базовой станции восстанавливать передаваемый сигнал от каждого пользовательского терминала и могут ухудшать качество функционирования для соответствующих пользовательских терминалов.
Контур временного управления может использоваться для регулирования временных характеристик каждого пользовательского терминала, с тем чтобы его передаваемый сигнал поступал в базовую станцию в надлежащее время. Проектирование контура временного управления может быть проблематичным вследствие различных факторов, таких как, например, трудность в получении точного измерения времени прихода передаваемого сигнала. Трудность может быть обусловлена способом отправки передаваемого сигнала, неблагоприятными канальными условиями и так далее.
Поэтому в данной области техники есть потребность в методах точного измерения времени прихода в приемник и надлежащей настройки временных характеристик в передатчике в системе связи.
Сущность изобретения
В материалах настоящей заявки описаны методы выполнения временной синхронизации с использованием спектральной оценки. Синхронизация влечет за собой определение времени прихода передаваемого сигнала (или сигнала) на приемник и настройку временных характеристик передаваемого сигнала в передатчике из условия, чтобы передаваемый сигнал приходил на приемник в требуемое время. Приемник обычно не имеет априорной информации о времени прихода передаваемого сигнала, так как передатчик может осуществлять передачу, начиная в произвольный момент времени, а беспроводный канал может вводить неизвестную задержку. Приемник может получать относительно точное измеренное значение времени прихода для передаваемого сигнала от передатчика с использованием спектральной оценки.
В одном из вариантов осуществления для выполнения временной синхронизации с использованием спектральной оценки приемник получает оценку частотной характеристики для символов пилот-сигнала, принятых по каждому набору частотных поддиапазонов, используемых для передачи пилот-сигнала. Приемник может получать разные оценки частотных характеристик для разных наборов поддиапазонов. Приемник, в таком случае, выполняет спектральную оценку над оценками частотных характеристик, чтобы получить измеренное время прихода для передаваемого сигнала с передатчика. Спектральная оценка определяет доминантную частотную составляющую в оценках частотных характеристик и выводит измеренное время прихода на основании этой доминантной частотной составляющей, как описано ниже. Временное рассогласование между измеренным временем прихода и требуемым временем прихода вычисляется и может фильтроваться с помощью фильтра нижних частот. Фильтрованное или нефильтрованное временное рассогласование масштабируется коэффициентом усиления, который может быть постоянным или настраиваемым на основании одного или более критериев. Затем формируется временная поправка на основании масштабированного временного рассогласования и с использованием линейных и/или нелинейных функций. Например, временная поправка может ограничиваться (или находиться в состоянии насыщения), чтобы находиться в пределах предопределенного диапазона значений для учета погрешности в измерении времени прихода. Временная поправка передается в передатчик и используется для настройки временных характеристик передаваемого сигнала в передатчике.
Различные аспекты и варианты осуществления изобретения ниже описаны более подробно.
Краткое описание чертежей
Признаки и сущность настоящего изобретения поясняются в подробном описании, изложенном ниже, иллюстрируемом чертежами, на которых одинаковые ссылочные позиции использованы для соответствующего обозначения на всех чертежах.
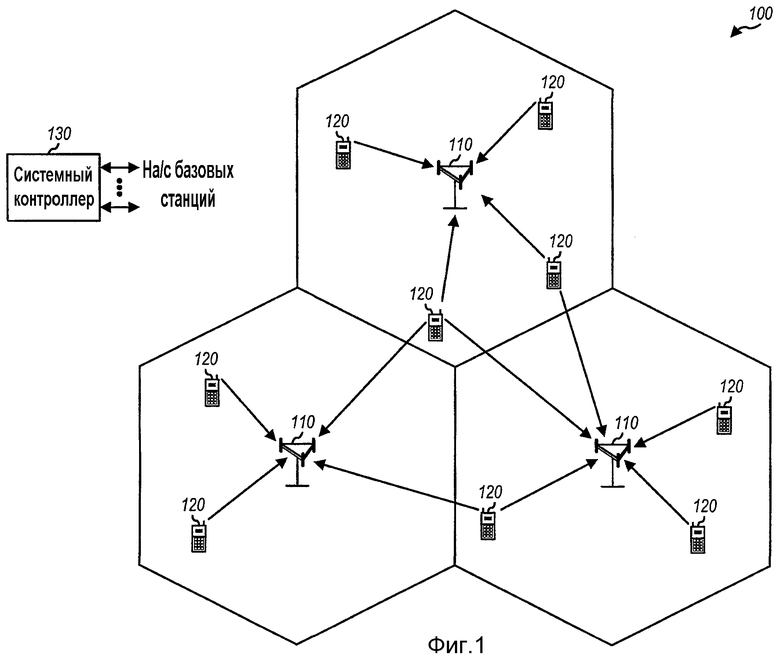
Фиг.1 показывает систему беспроводной связи множественного доступа.
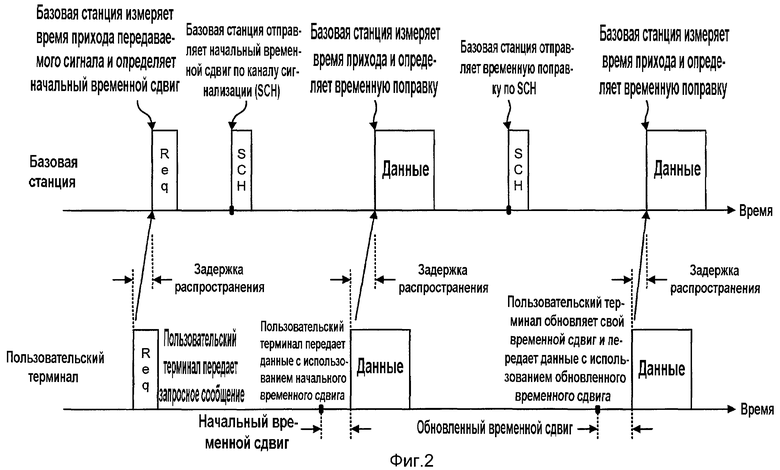
Фиг.2 показывает последовательность операций для настройки временных характеристик пользовательского терминала для передачи данных на базовую станцию.
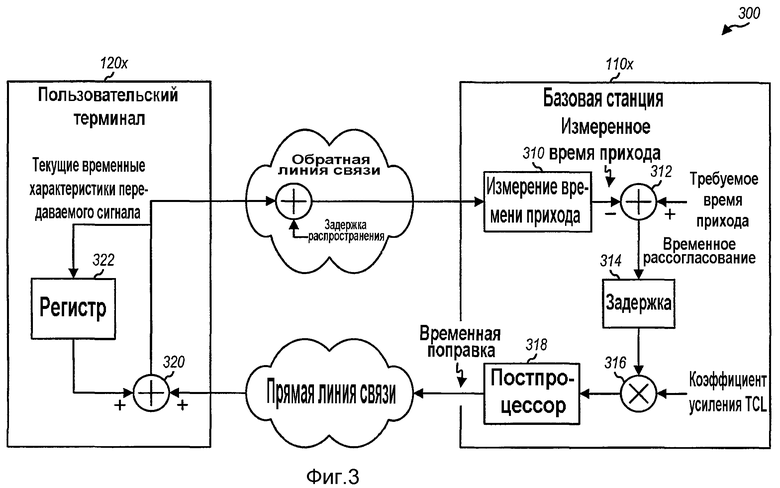
Фиг.3 показывает модель контура временного управления (TCL).
Фиг.4A и 4B показывают две примерные схемы передачи.
Фиг.5 показывает профиль канала и характеристику измерения времени прихода.
Фиг.6 показывает ступенчатые характеристики контура временного управления для разных коэффициентов усиления TCL.
Фиг.7 показывает последовательность операций для выполнения временной синхронизации с использованием спектральной оценки.
Фиг.8 показывает структурную схему пользовательского терминала и базовой станции.
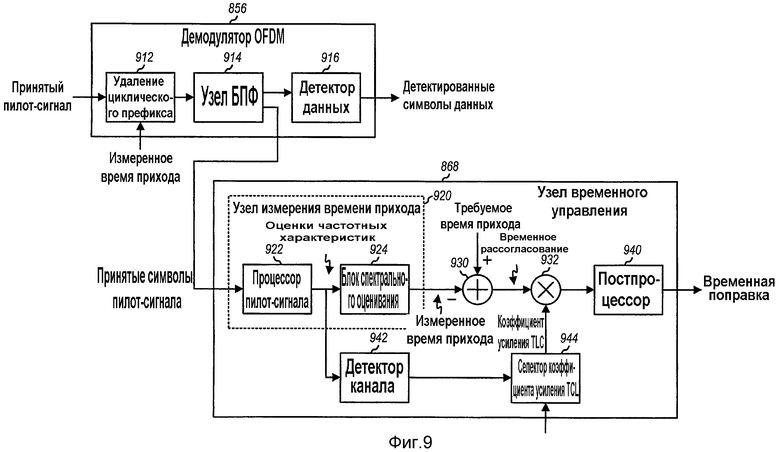
Фиг.9 показывает демодулятор OFDM и узел временного управления.
Подробное описание
Слово «примерный» используется в материалах настоящей заявки, чтобы обозначать «служащий в качестве примера, отдельного случая или иллюстрации». Любой вариант осуществления или конструкция, описанные в материалах настоящей заявки как «примерные», необязательно должны истолковываться в качестве предпочтительных или преимущественных над другими вариантами осуществления или конструкциями.
Фиг.1 показывает систему 100 беспроводной связи множественного доступа. Система 100 включает в себя некоторое количество базовых станций 110, которые поддерживают связь для некоторого количества пользовательских терминалов 120. Базовая станция типично является стационарной станцией, используемой для связи с пользовательскими терминалами, и также может называться пунктом доступа, узлом В или другими терминами. Пользовательские терминалы 120 типично рассредоточены по всей системе, и каждый пользовательский терминал может быть стационарным или мобильным. Пользовательский терминал также может называться мобильной станцией, пользовательским устройством (UE), устройством беспроводной связи или некоторыми другими терминами. Каждый пользовательский терминал может осуществлять связь с одной или более базовыми станциями по прямой и обратной линиям связи и в любой заданный момент. Для простоты, фиг.1 иллюстрирует только передачи обратной линии связи. В случае централизованной системы системный контроллер 130 связан с базовыми станциями и обеспечивает координацию и управление для этих базовых станций.
Описанные методы временной синхронизации могут использоваться для различных систем беспроводной и проводной связи. Например, эти методы могут использоваться для системы множественного доступа с ортогональным частотным разделением каналов (OFDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с частотным разделением каналов (FDMA) и так далее. Другие примеры таких систем множественного доступа включают в себя множественный доступ с кодовым разделением каналов с множеством несущих (MC-CDMA) и широкополосный CDMA (W-CDMA), высокоскоростной пакетный доступ по нисходящей линии связи (HSDPA). Эти методы также могут использоваться для прямой линии связи, чтобы настраивать временные характеристики базовых станций, и для обратной линии связи, чтобы настраивать временные характеристики пользовательских терминалов. Для ясности эти методы описаны ниже для обратной линии связи в системе беспроводного OFDMA.
Система OFDMA использует мультиплексирование с ортогональным частотным разделением каналов (OFDM). OFDM является методом модуляции с множеством несущих, которая фактически разделяет всю ширину полосы пропускания системы на множество (N) ортогональных частотных поддиапазонов. Эти поддиапазоны обычно также называются тонами, поднесущими, элементами разрешения и частотными каналами. Каждый поддиапазон связан с соответствующей поднесущей, которая может модулироваться данными. До N символов модуляции могут передаваться в N совокупных поддиапазонах в каждом периоде символа OFDM. Эти символы модуляции преобразуются во временную область с помощью N-точечного обратного быстрого преобразования Фурье (ОБПФ) для формирования преобразованных символов, которые содержат N символов псевдошумовой последовательности или выборок временной области. Для противодействия межсимвольным помехам (ISI), которые вызваны избирательным по частоте замиранием в многолучевом канале, C символов псевдошумовой последовательности преобразованного символа повторяются для формирования символа OFDM, который содержит N+C символов псевдошумовой последовательности, где C типично является долей N. C повторенных символов псевдошумовой последовательности часто называются циклическим префиксом, а C является длиной циклического префикса. Период символа OFDM является длительностью одного символа OFDM и равен N+C периодам символа псевдошумовой последовательности.
Как показано на фиг.1, многочисленные пользовательские терминалы могут осуществлять передачу на каждую базовую станцию. Пользовательские терминалы могут быть рассредоточены по всей системе и могут испытывать разные задержки распространения до базовой станции. Задержка распространения для каждого пользовательского терминала также может изменяться во времени вследствие перемещения пользовательского терминала, изменений в беспроводном канале и так далее. Временные характеристики передаваемого сигнала с каждого пользовательского терминала могут настраиваться, чтобы принимать во внимание задержку распространения, воспринимаемую таким пользовательским терминалом. Это гарантирует, что передаваемые сигналы с разных пользовательских терминалов выравниваются по времени прихода на каждой базовой станции и не создают помехи по отношению друг к другу.
Фиг.2 показывает последовательность операций для настройки временных характеристик пользовательского терминала для передачи данных по обратной линии связи, с пользовательского терминала на базовую станцию. Вначале пользовательский терминал передает запросное сообщение на базовую станцию. Это сообщение может запрашивать доступ к системе, разрешение передавать по обратной линии связи и так далее. Это сообщение может содержать указание начального момента времени, в который передано сообщение, основанное на временных характеристиках передачи в пользовательском терминале. Базовая станция принимает запросное сообщение и измеряет время прихода передаваемого сигнала с пользовательского терминала. Базовая станция затем определяет начальный временной сдвиг, например, на основании времени начала передачи, указанного запросным сообщением и временем прихода, измеренным базовой станцией. Начальным временным сдвигом является величина поправки по отношению к временным характеристикам передаваемого сигнала в пользовательском терминале, для того чтобы базовой станции принимать передаваемый сигнал с пользовательского терминала в надлежащий момент времени. Базовая станция передает начальный временной сдвиг через канал сигнализации (SCH). Пользовательский терминал принимает начальный временной сдвиг, настраивает временные характеристики своего передаваемого сигнала соответствующим образом и передает данные с использованием начального временного сдвига.
Базовая станция принимает передачу данных с пользовательского терминала и измеряет время прихода этого передаваемого сигнала. Задержка распространения для пользовательского терминала может измениться после последней передачи. В этом случае время прихода передачи данных может отличаться от требуемого времени прихода для передачи данных, которая может быть началом временного интервала, который базовая станция выделила пользовательскому терминалу. Базовая станция вычисляет разницу или рассогласование между измеренным временем прихода и требуемым временем прихода и определяет временную поправку для пользовательского терминала. Затем базовая станция передает временную поправку через канал SCH. Пользовательский терминал принимает временную поправку, соответственно, обновляет временные характеристики своего передаваемого сигнала и передает данные с использованием обновленного временного сдвига.
Последовательность операций настройки временных характеристик в типовом случае продолжается на протяжении всей передачи с пользовательского терминала. Базовая станция измеряет время прихода каждого передаваемого сигнала, принятого с пользовательского терминала, и определяет временную поправку. Пользовательский терминал обновляет временные характеристики своего передаваемого сигнала для каждой поправки временных характеристик, принятой с базовой станции. Текущие временные характеристики передаваемого сигнала на пользовательском терминале определяются посредством начального временного сдвига плюс все временные поправки, принятые с базовой станции. Пользовательский терминал использует текущие временные характеристики передаваемого сигнала для передачи на базовую станцию.
Фиг.3 показывает примерную модель 300 контура временного управления (TCL) между пользовательским терминалом 120x и базовой станцией 110x. Пользовательский терминал осуществляет передачу по обратной линии связи с использованием текущих временных характеристик своего передаваемого сигнала. Передаваемый сигнал испытывает задержку распространения по беспроводному каналу и также может искажаться многолучевым распространением в беспроводном канале. Задержка распространения может произвольно изменяться во времени.
На базовой станции узел 310 измерения времени прихода принимает передаваемый сигнал с пользовательского терминала, измеряет время прихода принятого передаваемого сигнала и выдает измеренное время прихода. Сумматор 312 вычитает измеренное время прихода из требуемого времени прихода и выдает временное рассогласование для принятого передаваемого сигнала. Узел 314 задержки обеспечивает задержку в один период обновления для контура временного управления. Узел 314 задержки включен в модель 300 для учета задержки при обновлении контура временного управления. Задержка обновления обусловлена обстоятельством, что измерение времени прихода, произведенное в текущем периоде обновления TCL, не отражается во временных характеристиках передачи в пользовательском терминале до следующего периода обновления TCL. Частота обновления TCL, а следовательно, период обновления TCL, определяется частотой, с которой временные поправки передаются базовой станцией на пользовательский терминал. Обновление TCL может быть постоянным или переменным в зависимости от конструкции системы.
Умножитель 316 перемножает задержанное временное рассогласование из узла 314 задержки с коэффициентом усиления TCL и выдает масштабированное временное рассогласование. Коэффициент усиления TCL определяет характеристики контура для контура временного управления, как описано ниже. Постпроцессор 318 квантует масштабированное временное рассогласование, выполняет постобработку (если таковая имеет место) над квантованным значением и выдает временную поправку для принятого передаваемого сигнала. Например, постпроцессор 318 может выполнять насыщение или ограничивать временную поправку для нахождения в пределах предопределенного диапазона значений. Временная поправка указывает, должен ли пользовательский терминал внести опережение или запаздывание во временные характеристики передачи, чтобы передаваемый сигнал с пользовательского терминала принимался в требуемое время прихода. Временная поправка может быть задана в предопределенных единицах (например, восемь кодовых элементов псевдошумовой последовательности). Базовая станция отправляет временную поправку через прямую линию связи на пользовательский терминал.
В пользовательском терминале сумматор 320 принимает временную поправку с базовой станции, суммирует эту временную поправку с предшествующими временными характеристиками передаваемого сигнала, сохраненными в регистре 322, и выдает текущие временные характеристики передаваемого сигнала. Текущие временные характеристики передаваемого сигнала сохраняются в регистре 322 и используются для следующей передачи на базовую станцию. Сумматор 320 и регистр 322 образуют накапливающий сумматор, который обновляет временные характеристики передаваемого сигнала в пользовательском терминале на основании временных поправок, принятых с базовой станции.
Обработка для начального временного сдвига может быть отличной от обработки для временной поправки. Например, временное рассогласование для первого передаваемого сигнала, принятого с пользовательского терминала, может масштабироваться единицей (взамен коэффициента усиления TCL) для получения начального временного сдвига, а постобработка может быть опущена. Сумматор 320 может суммировать начальный временной сдвиг с предшествующими временными характеристиками передаваемого сигнала таким же образом, как для временной поправки.
Фиг.3 показывает контур временного управления первого порядка с одним накапливающим сумматором в контуре. Другие контуры временного управления также могут использоваться для настройки временных характеристик передаваемого сигнала в пользовательском терминале для принятия во внимание задержки распространения, вводимой беспроводным каналом. Например, контур временного управления второго порядка также может использоваться.
Время прихода передаваемого сигнала может измеряться с использованием различных методов. Подходящий метод измерения может выбираться на основании различных факторов, таких как, например, способ, которым в системе передаются данные и пилот-сигнал. Пилот-сигнал представляет собой известные данные, которые обрабатываются и передаются известным образом. Передатчик может передавать пилот-сигнал для обеспечения приемнику возможности выполнения различных функций, таких как временная синхронизация, оценка канала, частотная коррекция, автоматическая регулировка усиления и так далее. Несколько примерных схем передачи для передачи данных и пилот-сигнала описаны ниже.
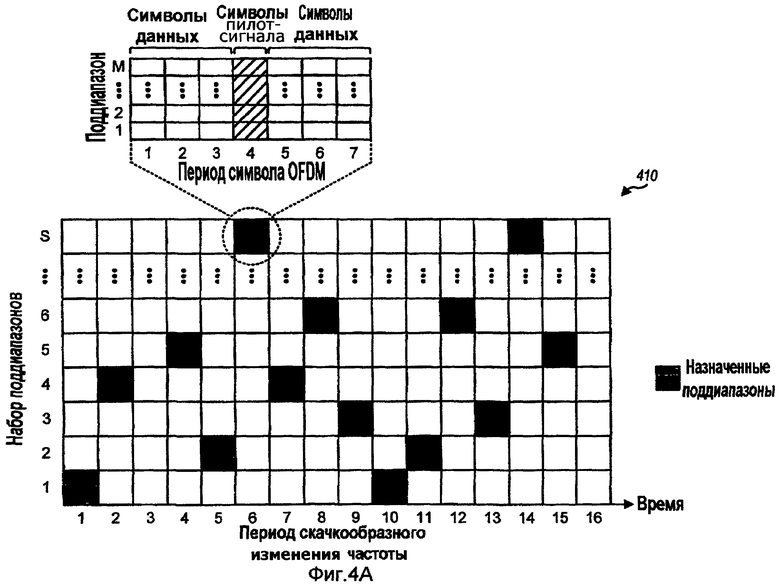
Фиг.4А показывает схему 410 передачи со скачкообразным изменением частоты (FH), которая может использоваться для системы OFDMA. Скачкообразное изменение частоты может рандомизировать помехи и обеспечивать частотное разнесение несмотря на отрицательные влияния тракта. При использовании скачкообразного изменения частоты каждому пользовательскому терминалу назначается разная последовательность FH, которая указывает конкретный поддиапазон(ы) для использования в каждый период скачкообразного изменения. Каждый период скачкообразного изменения может занимать один или множество периодов символа OFDM. Каждая последовательность FH может псевдослучайно выбирать поддиапазоны, чтобы использовать для передачи. Последовательности FH для разных пользовательских терминалов, связанных с одной и той же базовой станцией, ортогональны одна по отношению к другой, с тем чтобы никакие два пользовательских терминала не использовали один и тот же поддиапазон в любом заданном периоде скачкообразного изменения частоты. Это позволяет избежать «внутрисотовых» помех среди пользовательских терминалов, осуществляющих связь с одной и той же базовой станцией. Последовательности FH для каждой базовой станции являются псевдослучайными относительно последовательностей FH для близлежащих базовых станций. Это рандомизирует «внутрисотовые» помехи среди пользовательских терминалов, осуществляющих связь с разными базовыми станциями.
Для примера, показанного на фиг.4А, S наборов поддиапазонов сформированы с N совокупными поддиапазонами, и каждый набор содержит М поддиапазонов, где N=M×S, M≥1 и S>1. M поддиапазонов в каждом наборе могут быть смежными (как показано на фиг.4А) или несмежными. Пользовательскому терминалу может быть назначен один набор поддиапазонов в каждом периоде скачкообразного изменения частоты. Символы данных (которые являются символами модуляции для данных) могут быть мультиплексированы с временным разделением (TDM) с символами пилот-сигнала (которые являются символами модуляции для пилот-сигнала), как показано на фиг.4А. Схема 410 передачи может быть использована, например, для обратной линии связи в системе OFDMA.
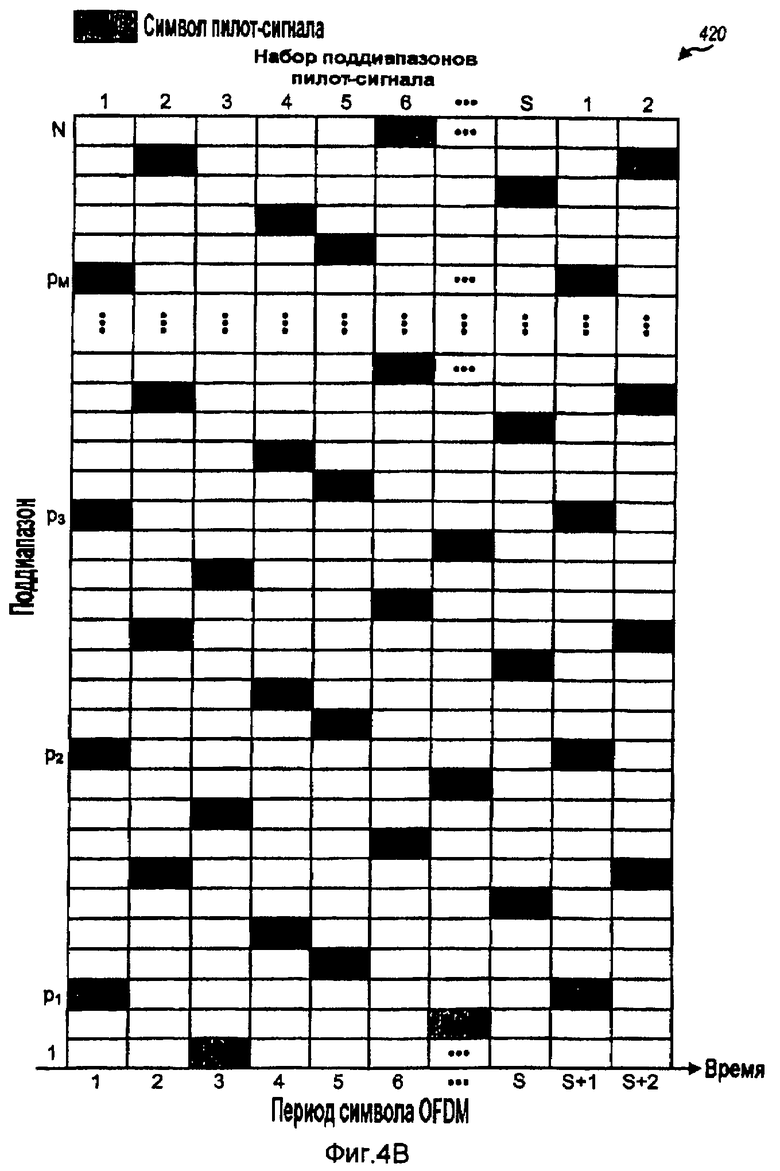
Фиг.4В показывает схему 420 чередующейся передачи, которая также может использоваться для системы OFDMA. Для примера, показанного на фиг. 4B, сформированы S наборов поддиапазонов, причем каждый набор содержит M поддиапазонов. Для обеспечения частотного разнесения M поддиапазонов в каждом наборе могут быть равномерно разнесены на S поддиапазонов. S наборов поддиапазонов, в таком случае, чередуются друг с другом, как показано на фиг.4В. В каждом периоде символа OFDM один набор поддиапазонов может использоваться для передачи пилот-сигнала, а оставшиеся S-1 поддиапазонов могут использоваться для передачи данных. Разные наборы поддиапазонов могут использоваться для передачи пилот-сигнала в разных периодах символов OFDM. Эти наборы поддиапазонов могут выбираться псевдослучайным образом (например, с помощью PN-последовательности) или детерминированным образом (например, с помощью предопределенной последовательности, длиной в S, как показано на фиг.4B). Схема 420 передачи может использоваться, например, для прямой линии связи в системе OFDMA.
Схема передачи, которая является комбинацией двух схем, показанных на фиг.4А и 4В, может использоваться для обратной линии связи. Для этой схемы передачи сформированы S чередующихся наборов поддиапазонов, например, как показано на фиг.4В. Однако каждый период скачкообразного изменения занимает множество периодов символов OFDM, а данные и пилот-сигнал мультиплексируются с временным разделением в каждом периоде скачкообразного изменения, например, как показано на фиг.4А.
Вообще, может быть сформировано любое количество наборов поддиапазонов, а каждый набор может содержать любое количество и любое сочетание поддиапазонов. Измерение времени прихода и временная синхронизация могут выполняться разными способами в зависимости от конкретной схемы, используемой для передачи данных и пилот-сигнала.
В одном из вариантов осуществления временная синхронизация выполняется с использованием спектральной оценки. Спектральная оценка может предусматривать относительно точные измерения времени прихода на основании узкополосного пилот-сигнала, который передается в каждый данный момент времени только в части полной ширины полосы системы, например по M поддиапазонам из числа N совокупных поддиапазонов, как показано на фиг.4А или 4В. Спектральная оценка также может использоваться для широкополосного пилот-сигнала, который передается по всем или большей части из N совокупных поддиапазонов, например, способом TDM с данными.
Беспроводный канал в системе OFDMA может характеризоваться либо импульсной характеристикой канала, либо соответствующей частотной характеристикой канала. Как используется в настоящем описании в соответствии с традиционной терминологией, импульсная характеристика канала представляет собой характеристику беспроводного канала во временной области, а частотная характеристика канала представляет собой характеристику канала в частотной области. В дискретных информационных системах частотной характеристикой канала является дискретное преобразование Фурье (ДПФ) импульсной характеристики канала. Импульсная характеристика канала образована последовательностью «отводов канала», причем каждый отвод канала определяется коэффициентом усиления отвода канала (или просто «коэффициентом усиления отвода») и задержкой отвода канала (или просто «задержкой отвода»). Частотная характеристика канала образована набором «коэффициентов усиления канала», причем каждый коэффициент усиления канала предназначен для отдельного поддиапазона.
Импульсная характеристика канала имеет L отводов канала, представляющих интерес, например L отводов канала достаточной интенсивности, где L≤N. Каждый отвод канала имеет комплексный коэффициент усиления hi и расположен с задержкой di. Вообще, каждый отвод канала может быть расположен между 1 и N (или 1≤di≤N), где N также является продолжительностью или длиной беспроводного канала. L коэффициентов усиления отводов обозначены как {hi}, или hi для i=1, 2, … L. L задержек отводов обозначены как {di}, или di для i=1, 2, … L. Коэффициентами {hi} усиления отводов являются коррелированными случайными переменными, которые изменяются со скоростью, определяемой доплеровским расширением для беспроводного канала. L коэффициентов {hi} усиления отводов, а также L задержек {di} отводов неизвестны и могут быть оценены, как описано ниже.
Импульсная характеристика канала может быть представлена в z-области L-отводным фильтром, H(z), с конечной импульсной характеристикой (КИХ, FIR), как изложено ниже:

где z-1 обозначает задержку в один период символа псевдошумовой последовательности, а  обозначает задержку i-го отвода канала. Импульсная характеристика канала также может быть представлена вектором
h
L×1, без явной ссылки на задержки {di} отводов, как изложено ниже:
обозначает задержку i-го отвода канала. Импульсная характеристика канала также может быть представлена вектором
h
L×1, без явной ссылки на задержки {di} отводов, как изложено ниже:

где «T» обозначает транспозицию.
Профиль канала может быть определен, как изложено ниже:

где  обозначает операцию усреднения по времени;
обозначает операцию усреднения по времени;
diag { M } - диагональная матрица только с диагональными элементами матрицы M ;
P - диагональная матрица L×L для профиля канала.
Диагональная матрица содержит допустимые ненулевые значения по диагонали и нули в других позициях. Диагональные элементы P представляют профиль канала, определенный согласно h . Профиль канала указывает на долговременную усредненную по времени энергию отводов канала в импульсной характеристике канала. Профиль канала не учитывает кратковременные эффекты, такие как замирание, доплеровский эффект и так далее. Профиль канала, таким образом, показывает коэффициент отражения/коэффициент пропускания среды, через которую может проходить сигнал.
Коэффициент усиления канала частотной области может быть оценен для каждого поддиапазона, используемого для передачи контрольного сигнала, как изложено ниже:

где yk - принятый символ пилот-сигнала для поддиапазона k;
pk - символ пилот-сигнала, переданный по поддиапазону k;
Hk - оценка коэффициента усиления канала для поддиапазона k.
Для простоты, равенство (4) допускает, что M последовательных поддиапазонов используются для передачи пилот-сигнала, например, как показано на фиг.4А, так что индекс k поддиапазона пробегает от 1 до M. Вообще, любые поддиапазоны могут использоваться для передачи пилот-сигнала, и эти поддиапазоны известны приемнику.
M коэффициентов {Hk} усиления канала для M поддиапазонов, используемых для передачи пилот-сигнала, могут оцениваться на основании символов пилот-сигналов, принимаемых по этим поддиапазонам, как показано в равенстве (4). Коэффициенты усиления канала являются значениями частотной области. Каждый коэффициент усиления канала может быть выражен в виде преобразования Фурье L (неизвестных) отводов канала временной области, как изложено ниже:

где ωi=2πdi/N - угловая частота (в радианах) для i-го отвода канала;
ni - шум для i-го отвода канала.
Показатель «k-1» (вместо просто «k») в экспонентах в равенстве (5) обусловлен индексом поддиапазона, который начинается с 1 вместо 0. Угловые частоты, ωi для i=l, 2, … L, являются частотными составляющими коэффициентов {Hk} усиления канала и непосредственно связаны с неизвестными задержками отводов для импульсной характеристики канала. Задержки отводов, таким образом, могут оцениваться посредством выполнения спектральной оценки по коэффициентам {Hk} усиления канала, как описано ниже.
Равенство (5) может быть выражено в матричной форме, как изложено ниже:
где H - вектор M×1, содержащий оценки коэффициентов усиления канала для M поддиапазонов;
 - матрица «типа Фурье» M×L, содержащая элементы, показанные в равенстве (6);
- матрица «типа Фурье» M×L, содержащая элементы, показанные в равенстве (6);
n - вектор шума L×1.
Пилот-сигнал может передаваться по разным наборам из M поддиапазонов в разных временных интервалах, например, как показано на фиг.4А или 4В. Для схемы передачи, показанной на фиг.4А, пилот-сигнал может передаваться в поддиапазонах k=1, 2, … M в одном временном интервале, затем в поддиапазонах k=1+b, 2+b, … M+b в следующем временном интервале и так далее, где b может быть любым произвольным значением сдвига, который определен последовательностью FH. Коэффициенты усиления канала для пилот-сигнала, передаваемого в поддиапазонах k=1+b, 2+b, … M+b, могут быть выражены как:

где
B
- диагональная матрица L×L, заданная согласно
B
=diag( ,
,  , …
, …  ).
).
Матрица корреляции (или векторного произведения) M×M по H может быть определена как H · H H, где «H» обозначает сопряженную транспозицию. Долговременное усреднение по времени матрицы корреляции по H , обозначенное как R , может быть выражено как:

где I - единичная матрица с единицами по диагонали и нулями в других позициях;
σ2 - дисперсия шума.
Равенство (9) получено на основании равенств (3), (7) и (8). Разные b значений сдвига могут быть выбраны (например, псевдослучайным образом, как показано на фиг.4А, или детерминированным образом, как показано на фиг.4В) из условия, чтобы матрицы B для ансамбля разных значений сдвига усреднялись в ноль. В этом случае, если достаточный объем усреднения выполнен над матрицами корреляции, полученными для разных временных интервалов, то матрицы B нейтрализуются и не фигурируют в R . Равенство (9) также предполагает, что канальный шум является аддитивным белым Гауссовым шумом (AWGN) с нулевым средним, дисперсией σ2 и автоковариционной матрицей φ nn=σ2 I .
Разложение по собственным значениям может выполняться над матрицей R , как изложено ниже:

где V - унитарная матрица M×M собственных векторов R ;
D - диагональная матрица M×M собственных значений R .
Унитарная матрица M характеризуется свойством M H M = I . Столбцы унитарной матрицы ортогональны один другому, и каждый столбец обладает единичной мощностью. Разложение по собственным векторам описано в книге Gilbert Strang «Linear Algebra and Its Applications» («Линейная алгебра и ее применения»), Second Edition, Academic Press, 1980.
M диагональных элементов из D определяются как собственные значения R . M столбцов V определяются как собственные векторы R . Каждый столбец V соответствует одному собственному значению в D . Таким образом, первый или самый левый столбец V соответствует диагональному элементу в первом столбце D , второй столбец V соответствует диагональному элементу во втором столбце D и так далее.
M собственных значений в
D
могут быть упорядочены от меньшего к большему и обозначены как {λ1, λ2, … λM} после упорядочения, где λ1 - наименьшее собственное значение, а λM - наибольшее собственное значение. Когда собственные значения в
D
упорядочены, собственные векторы в
V
упорядочены соответственно. Если M>L, то M-L наименьших собственных значений в
D
(то есть с λ1 по λM-L) равны дисперсии σ2 шума и определяются как «шумовые» собственные значения. M-L собственных векторов в
V,
соответствующих M-L шумовым собственным значениям (то есть M-L самым левым столбцам
V
после упорядочивания), определяются как «шумовые» собственные векторы
R
и обозначены как {
v
1,
v
2, …
v
M-L}. Шумовые собственные векторы ортогональны столбцам из .
L коэффициентов усиления/мощностей отводов содержатся в матрице
P
, а L задержек отводов содержатся в матрице . Каждый из L столбцов имеет следующий вид:

где ℓ является индексом, представляющим неизвестную задержку отвода, и находится в пределах от 1 до N, или ℓ ∈ {1, 2, … N}.
Функция стоимости может быть определена, как изложено ниже:

L неизвестных задержек отводов могут быть получены на основании функции C(ℓ) стоимости, как изложено ниже. Функция стоимости количественно оценивается для каждого из N возможных значений ℓ, то есть для ℓ=1, 2, … N. Каждое значение ℓ представляет гипотетическое значение задержки для отвода канала. Для каждого значения ℓ сначала определяется вектор  , как показано в равенстве (11), и перемножается с каждым из M-L шумовых собственных векторов для получения M-L скалярных произведений, gk=
, как показано в равенстве (11), и перемножается с каждым из M-L шумовых собственных векторов для получения M-L скалярных произведений, gk= ·
v
k для k=1, 2, … M-L. Затем вычисляется мощность каждого скалярного произведения как | gk |2=gk ·
·
v
k для k=1, 2, … M-L. Затем вычисляется мощность каждого скалярного произведения как | gk |2=gk ·  , где «*» обозначает комплексное сопряжение. Мощности M-L скалярных произведений затем суммируются, а обратная величина суммарной мощности предоставляется в качестве значения Cℓ для этого значения ℓ. N значений стоимости, Cℓ для ℓ=1, 2, … N, получаются для N возможных значений ℓ.
, где «*» обозначает комплексное сопряжение. Мощности M-L скалярных произведений затем суммируются, а обратная величина суммарной мощности предоставляется в качестве значения Cℓ для этого значения ℓ. N значений стоимости, Cℓ для ℓ=1, 2, … N, получаются для N возможных значений ℓ.
Так как столбцы  ортогональны шумовым собственным векторам, скалярное произведение любого столбца из с любым шумовым собственным вектором является малым или нулевым. Следовательно, суммарная мощность M-L скалярных произведений для каждого столбца является малой, а обратная величина этой суммарной мощности является большой. Затем идентифицируются L наибольших значений из числа N значений стоимости. L значений ℓ, соответствующих этим L наибольшим значениям стоимости, представляют L неизвестных задержек отводов для импульсной характеристики канала. Эти L идентифицированных значений ℓ используются для формирования матрицы и используются вместе с известным значением сдвига b для формирования матрицы
B
. L коэффициентов усиления отводов затем могут быть выведены, как изложено ниже:
ортогональны шумовым собственным векторам, скалярное произведение любого столбца из с любым шумовым собственным вектором является малым или нулевым. Следовательно, суммарная мощность M-L скалярных произведений для каждого столбца является малой, а обратная величина этой суммарной мощности является большой. Затем идентифицируются L наибольших значений из числа N значений стоимости. L значений ℓ, соответствующих этим L наибольшим значениям стоимости, представляют L неизвестных задержек отводов для импульсной характеристики канала. Эти L идентифицированных значений ℓ используются для формирования матрицы и используются вместе с известным значением сдвига b для формирования матрицы
B
. L коэффициентов усиления отводов затем могут быть выведены, как изложено ниже:

где H b - вектор M×1 для оценки частотной характеристики для одного набора M поддиапазонов пилот-сигнала;
h b - вектор L×1 для оценки импульсной характеристики канала с L отводами.
Оценка h b импульсной характеристики может быть вычислена для оценки H b частотной характеристики, которая получается из передачи пилот-сигнала, принимаемого в одном наборе поддиапазонов. Оценки импульсной характеристики для разных наборов поддиапазонов могут усредняться, чтобы получить усредненную оценку импульсной характеристики с L отводами.
В описании, приведенном выше, L обозначает количество отводов канала, которые должны быть оценены, где L≤M. Вообще, L может быть или может не быть равной количеству отводов (Lact) в фактической импульсной характеристике беспроводного канала. Если L=Lact<M, то Lact отводов канала могут оцениваться, как описано выше. Если L≠Lact и L<M, то L отводов канала, представляющих профиль канала для беспроводного канала, могут быть получены, как описано выше. В общем случае, когда M возрастает, может оцениваться большее количество отводов канала с хорошей точностью и высоким разрешением. Для широкополосного пилот-сигнала с M, равным или близким к N, на основании широкополосного пилот-сигнала может быть оценена полная импульсная характеристика с числом отводов до N.
Для измерения времени прихода передаваемого сигнала, принятого через беспроводный канал, метод спектральной оценки, показанный в равенствах с (1) по (12), может выполняться с L, установленным в единицу. Если L=1, то метод спектральной оценки дает единственный отвод канала, находящийся в центре профиля канала, при условии, что M является большим чем единица. Задержка отвода, соответствующая этому единственному отводу канала, может использоваться в качестве измеренного времени прихода для передаваемого сигнала.
Выполнялось компьютерное моделирование для измерения времени прихода с использованием спектральной оценки для примерного беспроводного канала в примерной системе OFDMA. Эта система OFDMA обладает общей полосой пропускания системы в 5 МГц и использует структуру OFDM всего с 1024 поддиапазонами (N=1024), 16 поддиапазонами в каждом наборе (M=16) и циклическим префиксом в 48 символов псевдошумовой последовательности (C=48). Каждый период символа OFDM составляет 214,4 мкс, или (1024+48)/(5×l06). Каждый период скачкообразного изменения частоты занимает семь периодов символа OFDM, или 1,5 мс. Один символ пилот-сигнала отправляется в середине каждого периода скачкообразного изменения, как показано на фиг.4А.
Беспроводный канал имеет профиль канала, который составляет 38 символов псевдошумовой последовательности в длину, или {di}={1, 2, … 38}, которые являются приблизительно 80% длины циклического префикса. Профиль канала моделируется разными последовательностями случайных значений для каждого периода обновления TCL. Профиль канала изменяется случайным образом от одного периода обновления TCL к другому, так что последовательность случайных значений для профиля канала для текущего периода обновления TCL не коррелируется с последовательностью случайных значений для предшествующего периода обновления TCL. Канальный шум является AWGN-шумом, а отношение сигнал/шум (SNR) для принятого пилот-сигнала составляет 0 децибел (дБ).
Измерение времени прихода производится в каждом периоде обновления TCL, с тем чтобы частота измерений была такой же, как частота обновлений TCL. Периодом обновления TCL является 90 мс, а каждое измерение времени прихода основано на символах пилот-сигнала, принятых в 60 периодах скачкообразного изменения частоты. Вектор H b частотной характеристики канала получается для каждого периода скачкообразного изменения частоты на основании символов пилот-сигнала, принятых в таком периоде скачкообразного изменения. Матрица R обновляется в каждом периоде скачкообразного изменения частоты на основании вектора H b. Время прихода рассчитывается по 60 периодам скачкообразного изменения частоты посредством выполнения равенств с (10) по (12) с L=1.
Фиг.5 показывает график 510 отводов канала для беспроводного канала в одном периоде обновления TCL. 38 отводов канала выбираются случайным образом на период обновления TCL. Фиг.5 также показывает график 520 характеристики измерения времени прихода, обеспечиваемой методом спектральной оценки. Пик графика 520 является центром профиля канала, как оценено посредством метода спектральной оценки. Фиг.5 показывает, что метод спектральной оценки может определять центр профиля канала, даже если количество отводов канала превышает количество поддиапазонов, используемых для передачи пилот-сигнала, в каждом периоде скачкообразного изменения частоты. Момент времени, соответствующий центру профиля канала, предоставлен в качестве измеренного времени прихода.
Согласно фиг.3 временное рассогласование с сумматора 312 масштабируется согласно коэффициенту усиления TCL умножителем 316. Коэффициент усиления TCL определяет ширину полосы контура и коэффициент демпфирования контура временного управления, который, в свою очередь, определяет переходную характеристику контура временного управления. В общем случае, больший коэффициент усиления TCL соответствует более широкой полосе контура и более быстрому времени реакции, но более значительным флуктуациям синхронизации для зашумленного беспроводного канала. Наоборот, меньший коэффициент усиления TCL соответствует более узкой полосе контура и более медленному времени реакции, но меньшим флуктуациям синхронизации для зашумленного беспроводного канала.
Характеристики контура временного управления моделируются для примерной системы OFDMA и беспроводного канала, описанного выше для фиг.5. Для моделирования начальное время прихода для принятого передаваемого сигнала приводит к сдвигу в 0 символов псевдошумовой последовательности, а время прихода сдвинуто на -15 символов псевдошумовой последовательности. Время прихода измеряется на каждый период обновления TCL (которым являются каждые 60 периодов скачкообразного изменения частоты, или 90 мс), а контур временного управления также обновляется на каждый период обновления TCL.
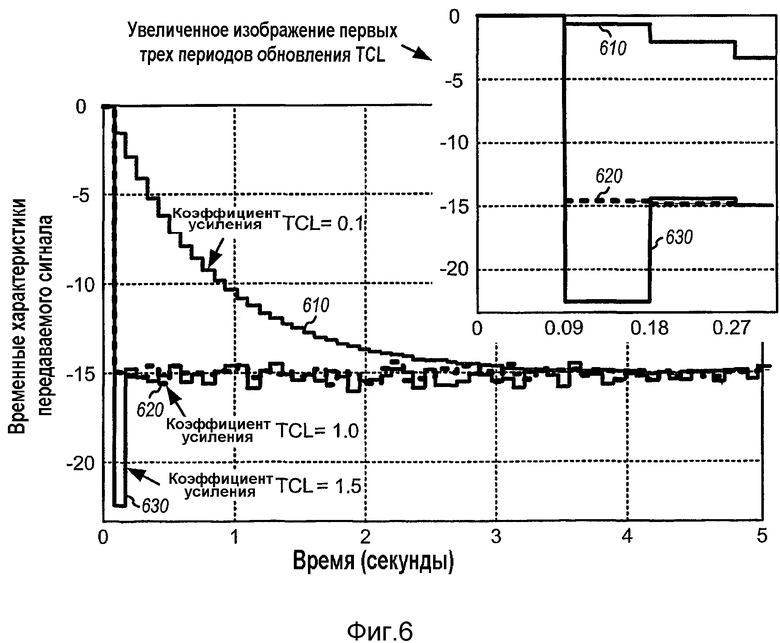
Фиг.6 показывает графики характеристик контура временного управления для ступенчатого входного воздействия при разных коэффициентах усиления TCL. Графики 610, 620 и 630 показывают переходные характеристики контура временного управления с коэффициентами усиления TCL, соответственно, 0,1, 1,0 и 1,5. График 610 показывает переходную характеристику, имеющую время установления приблизительно в 3 секунды, которое может быть слишком медленным. График 630 показывает переходную характеристику, имеющую 8 символов псевдошумовой последовательности в перерегулировании и звоне затухания, которые могут быть нежелательными. График 620 показывает импульсную характеристику, имеющую быстрое установление в требуемое время прихода и без перерегулирования. Хотя и не показано на фиг.6, переходная характеристика с постоянной времени, приблизительно равной 200 мс, и меньшим шумом может достигаться при коэффициенте усиления TCL, равном 0,5. Переходные характеристики, показанные на фиг.6, получены без насыщения, реализуемого постпроцессором 318 по фиг.3.
Как показано на фиг.6, коэффициент усиления TCL оказывает влияние на характеристики контура, которые определяют время реакции, а также шумовую характеристику контура временного управления. Коэффициент усиления TCL может быть постоянным значением, которое выбирается на основании компромисса между этими двумя критериями качества функционирования. Коэффициент усиления TCL также может быть конфигурируемым значением, которое выбирается на основании канальных условий. Например, высокий коэффициент усиления TCL может использоваться для высокого SNR, чтобы улучшать характеристику отслеживания, а низкий коэффициент усиления TCL может использоваться для низкого SNR, чтобы улучшать шумовую характеристику. SNR может оцениваться на основании принятого пилот-сигнала. Высокий коэффициент усиления TCL также может использоваться для высокой скорости сдвига в профиле канала, а низкий коэффициент передачи TCL может использоваться для низкой скорости сдвига в профиле канала. Скорость сдвига в профиле канала может оцениваться на основании измеренного времени прихода. Например, может приниматься решение о высокой скорости сдвига, если многочисленные временные рассогласования (или высокий процент временных рассогласований) имеют место для одного и того же направления. Высокий коэффициент усиления TCL также может использоваться для низкой дисперсии в результатах измерения времени прихода, что может указывать на относительно статичный или стационарный канал для неподвижного или малоподвижного пользовательского терминала. Наоборот, низкий коэффициент усиления TCL может использоваться для высокой дисперсии в результатах измерения времени прихода, что может указывать на быстро изменяющийся канал для высокоподвижного пользовательского терминала. Скорость сдвига профиля канала может выявляться и использоваться для регулирования коэффициента усиления TCL, а также для оценки определенных характеристик (например, скорости) беспроводного канала.
Коэффициент усиления TCL также может конфигурироваться на основе режимов работы. Например, высокий коэффициент усиления TCL может использоваться во время фазы захвата, а низкий коэффициент усиления TCL может использоваться во время фазы сопровождения. Фаза захвата может занимать первые несколько периодов обновления TCL, а фаза сопровождения может занимать оставшиеся периоды обновления TCL.
Метод спектральной оценки, как правило, обеспечивает точные измерения времени прихода, но иногда может давать оценки времени прихода, которые неточны на большую величину. Максимальная скорость, с которой профиль канала может сдвигаться, обычно ограничена скоростью пользовательского терминала. Например, метод спектральной оценки может давать оценки времени прихода, которые неточны на несколько символов псевдошумовой последовательности (например, на ±4 символа псевдошумовой последовательности для моделируемого сценария). Максимальная скорость сдвига в профиле канала может составлять долю символа псевдошумовой последовательности (например, 0,1 символа псевдошумовой последовательности) для каждого периода обновления TCL. Если метод спектральной оценки дает результат измерения времени прихода, который отличается от предыдущего измерения времени прихода на большую величину, то есть большая вероятность неточности измерения. В этом случае текущему результату измерения времени прихода может быть назначен меньший вес при обновлении контура временного управления. Меньший вес может быть реализован различными способами.
В одном из вариантов осуществления масштабированное временное рассогласование из умножителя 316 по фиг.3 переводится в насыщение постпроцессором 318, чтобы находиться в предопределенном диапазоне значений. Этот диапазон может выбираться на основании максимальной скорости сдвига в профиле канала. Например, если максимальная скорость сдвига равна 0,1 символа псевдошумовой последовательности на период обновления TCL, то временная поправка может быть ограничена диапазоном от +1 символа псевдошумовой последовательности до -1 символа псевдошумовой последовательности. Насыщение снижает величину флуктуаций временных характеристик, обусловленных неточными измерениями времени прихода.
В другом варианте осуществления постпроцессор 318 выдает большую временную поправку, если получены многочисленные большие временные рассогласования. Постпроцессор 318 может ограничивать временную поправку для первого большого временного рассогласования, как описано выше. Постпроцессор 318 может выдавать большую временную поправку, если последующее временное рассогласование также велико, что может подтверждать точность предыдущего измерения времени прихода. Эта схема «ожидания и подтверждения» может допускать более быструю реакцию контура наряду с устранением многих больших ошибок измерения времени прихода.
В еще одном другом варианте осуществления узел 314 задержки заменен фильтром нижних частот, который фильтрует временные рассогласования с сумматора 312. Ширина полосы этого фильтра нижних частот достаточна для того, чтобы характеристика фильтра не вносила неблагоприятные изменения в характеристики замкнутого контура для контура временного управления.
В еще одном другом варианте осуществления постпроцессор 318 выводит временную поправку на основании (1) первой (например, линейной) функции временного рассогласования, если амплитуда временного рассогласования находится в пределах предопределенного диапазона, и (2) второй (например, нелинейной) функции временного рассогласования, если амплитуда находится вне предопределенного диапазона. Нелинейная функция может соответствовать ограничению или насыщению, схеме ожидания и подтверждения, описанной выше, или некоторой другой функции.
Вышеприведенное описание предполагает, что временные поправки, переданные базовой станцией, корректно принимаются пользовательским терминалом. В зависимости от того, каким образом передаются временные поправки, могут иметь место ошибки в принятых временных поправках. Контур временного управления может быть спроектирован для учета этих ошибок. Например, настройки временных характеристик могут передаваться более часто и/или с более высокой мощностью передачи для того, чтобы уменьшить частоту появления ошибок.
Фиг.7 показывает последовательность 700 операций для выполнения временной синхронизации с использованием спектральной оценки. Оценка частотной характеристики получается для символов пилот-сигналов, принятых по каждому набору поддиапазонов (этап 710). Разные оценки частотных характеристик могут быть получены для разных наборов поддиапазонов. Спектральная оценка затем выполняется над оценками частотных характеристик для получения измеренного времени прихода (этап 712). Спектральная оценка определяет доминантную частотную составляющую в оценках частотных характеристик и выводит измеренное время прихода на основании этой доминантной частотной составляющей.
Определяется временное рассогласование между измеренным временем прихода и требуемым временем прихода (этап 714). Временное рассогласование может фильтроваться фильтром нижних частот. Фильтрованное или нефильтрованное временное рассогласование масштабируется коэффициентом усиления TCL, который может быть фиксированным значением или настраиваемым значением, которое определяется на основании канальных условий и/или выбранного режима работы (этап 716). Затем формируется временная поправка на основании масштабированного временного рассогласования (этап 718). Временная поправка может ограничиваться для нахождения в пределах предопределенного диапазона значений или формироваться на основании линейной и/или нелинейной функций для учета погрешности измерения.
В описании, приведенном выше, измерение времени прихода основано на том, что неизвестные задержки (di для i=1, 2, … L) отводов, которые должны быть выявлены, соответствуют неизвестным частотным составляющим (ωi для i=1, 2, … L) усилений каналов частотной области, полученных из принятых символов пилот-сигнала. Затем выполняется спектральная оценка (или спектральный анализ), чтобы определить неизвестные частотные составляющие усилений канала. Эти частотные составляющие после определения служат в качестве оценок неизвестных задержек отводов для оценки импульсной характеристики канала. Для измерения времени прихода метод спектральной оценки предоставляет доминантную частотную составляющую усилений канала, которая затем используется для выведения измеренного времени прихода.
Метод спектральной оценки может давать точные измерения времени прихода для (1) узкополосного пилот-сигнала, который передается только в небольшой части ширины полосы системы в каждый данный момент времени, и (2) широкополосного пилот- сигнала, который передается во всей или большой части ширины полосы системы. Для узкополосного пилот-сигнала только небольшая часть ширины полосы системы исследуется в любой заданный момент времени. Разрешение, с которым может определяться время прихода передаваемого сигнала, ограничено шириной полосы канальных замеров. Например, если пилот-сигнал передается только в M поддиапазонах в каждый данный момент времени, где M может быть значительно меньшим, чем N, то приемник может наблюдать беспроводный канал только в относительно узкой полосе на основании пилот-сигнала, принимаемого в этих M поддиапазонах. Следовательно, грубое измерение времени прихода с временным разрешением в Tofdm/M может быть получено на основании узкополосного пилот-сигнала, принятого по любому одному набору M поддиапазонов, где Tofdm - длительность символа OFDM без циклического префикса. Метод спектральной оценки может давать более точное измерение времени прихода с временным разрешением Tofdm/N. Как проиллюстрировано примером, приведенным выше, Tofdm/N может быть более высокой разрешающей способности, чем временное разрешение Tofdm/M, полученное с использованием любой одной передачи узкополосного сигнала, если M значительно меньше, чем N. Точное измерение времени прихода является важным для временной синхронизации, чтобы избежать или минимизировать помехи между множеством передатчиков, а также для обработки в приемнике, чтобы получать как можно больше энергии в каждом принятом символе OFDM.
Ради ясности выше был описан конкретный метод спектральной оценки, часто упоминаемый как метод многофакторного анализа сигналов (MUSIC). Другие методы спектральной оценки также могут использоваться для выявления частотных составляющих оценок частотных характеристик и, следовательно, задержек отводов для оценок импульсных характеристик, что также входит в объем изобретения. Например, спектральная оценка может выполняться на основании метода периодограмм, блока оценки Прони, метода гармонического разложения Писаренко и так далее. Каждый метод спектральной оценки в типовом случае применяет некоторые типы усреднения для получения хорошей оценки отыскиваемой частотной составляющей(их). Эти различные методы спектральной оценки, в том числе метод MUSIC, описаны в работе S.L. Makple Jr «A Tutorial Overview of Modern Spectral Estimation» Proc. IEEE, 1989, p.2152-2157, а также в работе B.D. Kao, K.S. Arun «Model Based Processing of Signals: A State Space Approach» Proc. IEEE, V.80, №2, Feb. 1992, p.283-309.
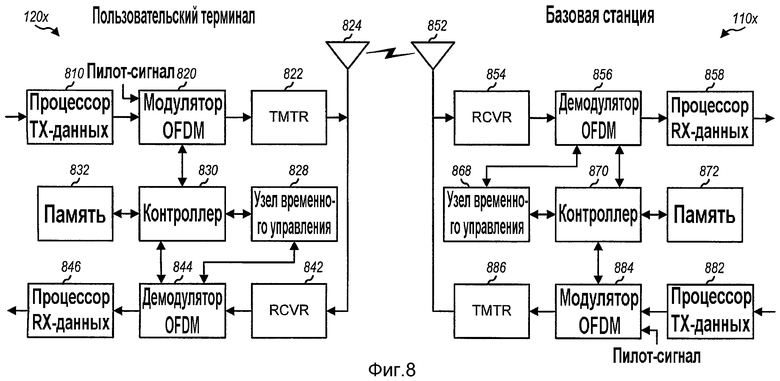
Фиг.8 показывает структурную схему пользовательского терминала 120x и базовой станции 110х. По обратной линии связи, в пользовательском терминале 120x, процессор 810 данных передачи (TX) принимает, форматирует, кодирует, перемежает и посимвольно отображает данные трафика и выдает модулированные символы (или символы данных). Модулятор 820 OFDM принимает символы данных и символы пилот-сигнала, выполняет модуляцию OFDM и выдает поток символов OFDM. Символы пилот-сигнала и символы данных могут передаваться различными способами, например, как показано на фиг.4А. Узел (TMTR) 822 передатчика принимает и формирует (например, преобразует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) поток символов OFDM и формирует сигнал обратной линии связи, который передается через антенну 824 на базовую станцию 110x.
На базовой станции 110x антенна 852 принимает сигнал обратной линии связи и выдает принятый сигнал в узел (RCVR) 854 приемника. Узел 854 приемника формирует (например, фильтрует, усиливает и преобразует с понижением частоты) принятый сигнал, оцифровывает сформированный сигнал и выдает принятые символы псевдошумовой последовательности в демодулятор 856 OFDM. Демодулятор 856 OFDM выполняет демодуляцию OFDM над принятыми символами псевдошумовой последовательности, выполняет детектирование данных над принятыми символами данных и выдает продетектированные символы данных, которые являются оценками переданных символов данных. Процессор 858 данных приема (RX) осуществляет обратное посимвольное отображение, обращенное перемежение и декодирование продетектированных символов данных, чтобы восстановить переданные данные. Обработка демодулятором 856 OFDM и процессором 858 RX-данных является комплементарной по отношению к обработке модулятором 820 OFDM и процессором 810 TX-данных, соответственно, в пользовательском терминале 120х.
В прямой линии связи процессор 882 TX-данных обрабатывает данные трафика и управляющие данные (например, для временных настроек) и выдает символы данных. Модулятор 884 OFDM принимает и мультиплексирует символы данных с символами пилот-сигнала, выполняет модуляцию OFDM и выдает поток символов OFDM. Для прямой и обратной линий связи могут использоваться одинаковые или разные схемы передачи. Например, схема передачи, показанная на фиг.4А, может использоваться для обратной линии связи, а схема передачи, показанная на фиг.4В, может использоваться для прямой линии связи. Узел 886 передатчика принимает и обрабатывает поток символов OFDM и формирует сигнал прямой линии связи, который передается через антенну 852 на пользовательский терминал.
В пользовательском терминале 120x сигнал прямой линии связи с базовой станции 110х принимается антенной 824 и обрабатывается узлом 842 приемника для получения принятых символов псевдошумовой последовательности. Демодулятор 844 OFDM обрабатывает принятые символы псевдошумовой последовательности и выдает продетектированные символы данных в процессор 846 RX-данных. Процессор 846 RX-данных обрабатывает детектированные символы данных, чтобы восстановить данные трафика, переданные базовой станцией 110x.
Контроллеры 830 и 870 управляют работой пользовательского терминала 120х и базовой станции 110х соответственно. Узлы 832 и 872 памяти хранят управляющие коды и данные, используемые соответственно контроллерами 830 и 870. Узлы 828 и 868 управления выполняют функции временной синхронизации, применяемые к пользовательскому терминалу 120х и базовой станции 110х соответственно. Контроллеры 830 и 870 также могут реализовывать узлы 838 и 868 временного управления соответственно и могут выполнять функции временной синхронизации для терминала 120х и базовой станции 110х соответственно.
Фиг.9 показывает вариант осуществления демодулятора 856 OFDM и узла 868 временного управления на базовой станции 110х. В пределах демодулятора 856 OFDM узел 912 удаления циклического префикса удаляет циклический префикс, присоединенный к каждому символу OFDM, на основании измеренного времени прихода, предоставленного узлом 868 временного управления. Узел 914 БПФ затем преобразует N принятых символов псевдошумовой последовательности для каждого принятого преобразованного символа в частотную область с помощью N-точечного БПФ и получает N принятых символов для N поддиапазонов. Узел 914 БПФ выдает принятые символы пилот-сигнала в узел 868 временного управления и принятые символы данных в детектор 916 данных. Детектор 916 данных выполняет детектирование (например, согласованную фильтрацию или компенсацию) над принятыми символами данных с помощью оценки частотной характеристики и выдает продетектированные символы данных в процессор 858 RX-данных.
Узел 868 временного управления выполняет обработку приемной стороны для контура временного управления для обратной линии связи, с пользовательского терминала 120х на базовую станцию 110х. Узел 920 измерения времени прихода получает принятые символы пилот-сигнала и измеряет время прихода передаваемых сигналов с пользовательского терминала 120х. В узле 920 процессор 922 пилот-сигнала удаляет модуляцию в каждом наборе принятых символов пилот-сигнала и выдает оценку частотной характеристики для обратной линии связи для пользовательского терминала 120х. Блок 924 спектральной оценки выполняет спектральную оценку над оценками частотных характеристик для разных наборов символов пилот-сигнала (например, переданных в разных периодах скачкообразного изменения частоты) и выдает измеренное время прихода для передаваемого сигнала с пользовательского терминала 120х. Сумматор 930 вычитает измеренное время прихода из требуемого времени прихода и выдает временное рассогласование. Контроллер 870 может определять требуемое время прихода на основании времени, запланированного для пользовательского терминала 120х. Фильтр нижних частот (не показан на фиг. 9) может фильтровать временное рассогласование и выдает отфильтрованное временное рассогласование. Умножитель 932 перемножает временное рассогласование из сумматора 930 (или отфильтрованное временное рассогласование из фильтра нижних частот) с коэффициентом усиления TCL и выдает масштабированное временное рассогласование.
Постпроцессор 940 принимает масштабированное временное рассогласование и формирует временную поправку для пользовательского терминала 120х. Постпроцессор 940 может реализовать любые методы, описанные выше, такие как, например, насыщение, ожидание и подтверждение и так далее. Временная поправка предписывает пользовательскому терминалу 120х перенести на более ранний срок или задержать его временные характеристики, чтобы его передаваемый сигнал приходил на базовую станцию 110х в требуемое время прихода.
Детектор 842 канала определяет канальные условия, например, SNR передаваемого сигнала, принятого с пользовательского терминала 120х, является ли обратная линия связи статической или быстро изменяющейся, и так далее. Детектор 944 коэффициента усиления TCL принимает канальные условия из детектора 942, выбранный режим работы (например, режим захвата или сопровождения) для контура временного управления из контроллера 870 и/или другие входные сигналы. Селектор 944 коэффициента усиления регулирует коэффициент усиления TCL для реализации требуемой характеристики для контура временного управления.
Контур временного управления для прямой линии связи, если необходим, может быть реализован образом, подобным описанному выше для обратной линии связи. Для этого контура временного управления пользовательский терминал 120х измеряет время прихода передаваемого сигнала, принятого с базовой станции 110х, например, с использованием спектральной оценки. Пользовательский терминал затем формирует временную поправку для прямой линии связи на основании измеренного времени прихода и требуемого времени прихода для передаваемого сигнала прямой линии связи. Базовая станция настраивает временные характеристики своего передаваемого сигнала для пользовательского терминала, чтобы передаваемый сигнал прямой линии связи приходил на пользовательский терминал в требуемое время прихода.
Описанные методы временной синхронизации могут быть реализованы различным образом. Например, эти методы могут быть реализованы в аппаратных средствах, программном обеспечении или их сочетании. Для аппаратной реализации узлы обработки для временной синхронизации в приемнике могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (ЦСП, DSP), устройствах цифровой сигнальной обработки (DSPD), программируемых логических устройствах (PLD), программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных модулях, предназначенных для выполнения описанных функций, или их сочетании. Узлы обработки для временной синхронизации в передатчике также могут быть реализованы в пределах одних или более ASIC, ЦСП и так далее.
Для программной реализации методы синхронизации могут быть реализованы модулями (например, процедурами, функциями и так далее), которые выполняют функции, описанные в материалах настоящей заявки. Программно реализованные коды могут храниться в узле памяти (например, узле 872 памяти по фиг.8) и выполняться процессором (например, контроллером 870). Узел памяти может быть реализован в процессоре или быть внешним по отношению к процессору.
Предшествующее описание раскрытых вариантов осуществления предоставлено, чтобы дать любому специалисту в данной области техники возможность реализовать или использовать настоящее изобретение. Различные модификации для этих вариантов осуществления будут очевидны специалистам в данной области техники, а общие принципы, определенные в материалах настоящей заявки, могут применяться к другим вариантам осуществления без изменения сущности или объема изобретения. Таким образом, настоящее изобретение не ограничивается описанными вариантами осуществления, а должно соответствовать самому широкому объему, согласованному с раскрытыми принципами и новыми признаками.

Изобретение относится к технике связи и может быть использовано в системах связи множественного доступа. Для выполнения временной синхронизации с использованием спектральной оценки приемник получает оценку частотной характеристики для символов пилот-сигнала, принимаемых по каждому набору частотных поддиапазонов, используемых для передачи пилот-сигнала. Приемник выполняет спектральное оценивание оценок частотных характеристик для разных наборов поддиапазонов для получения измеренного времени прихода передаваемого сигнала с передатчика. Спектральная оценка определяет доминантную частотную составляющую в оценках частотных характеристик и выводит измеренное время прихода на основании этой доминантной частотной составляющей. Временное рассогласование между измеренным временем прихода и требуемым временем прихода вычисляется и фильтрованное или нефильтрованное временное рассогласование масштабируется с постоянным или настраиваемым коэффициентом усиления. Затем формируется временная поправка на основании масштабированного временного рассогласования и с использованием линейной и/или нелинейной функций. Временная поправка подается в передатчик и используется для настройки временных характеристик передаваемого сигнала в передатчике. Технический результат - повышение точности измерения времени прихода передаваемого сигнала. 5 н. и 34 з.п. ф-лы, 9 ил.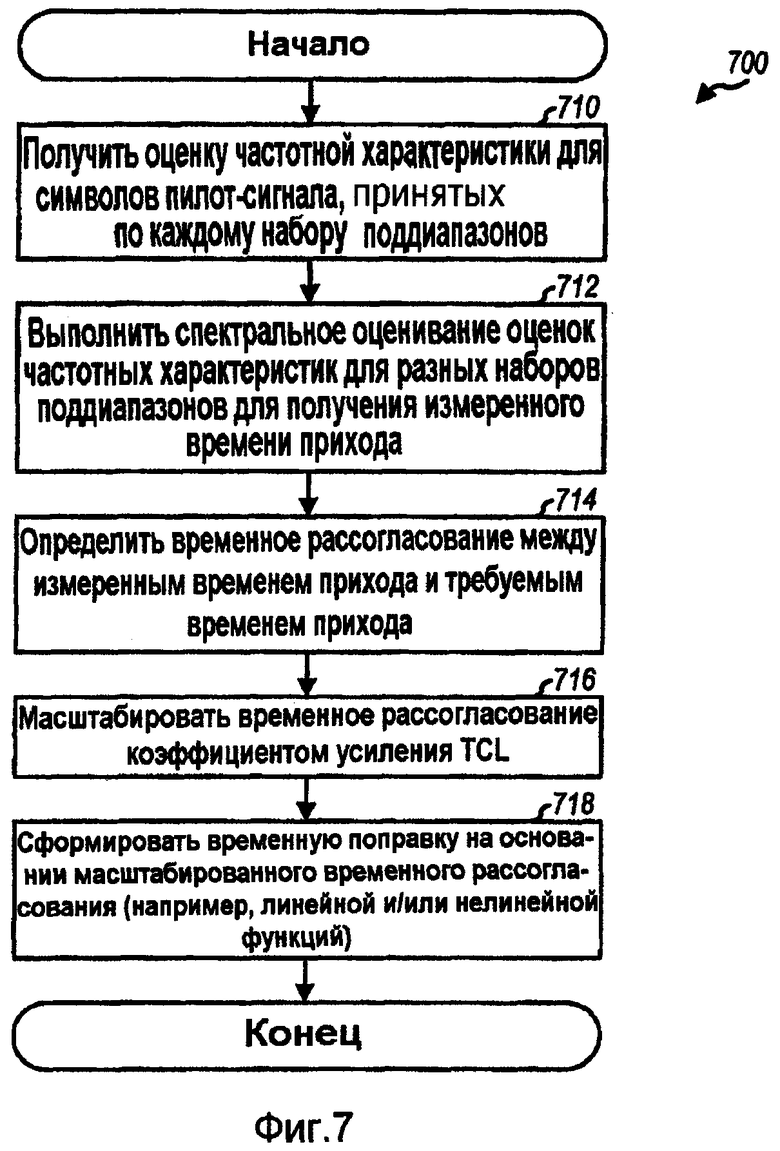
1. Способ выполнения временной синхронизации в системе беспроводной связи множественного доступа содержит этапы, на которых
измеряют время прихода передаваемого сигнала, принятого через канал связи, с использованием спектральной оценки, причем измерение времени прихода передаваемого сигнала содержит
получение оценки канала для канала связи и
выполнение спектрального оценивания оценки канала для получения измеренного времени прихода для передаваемого сигнала,
определяют временное рассогласование между измеренным временем прихода и требуемым временем прихода для передаваемого сигнала; и
формируют временную поправку на основании временного рассогласования.
2. Способ по п.1, в котором этап получения оценки канала для канала связи содержит получение множества оценок частотных характеристик для множества наборов частотных поддиапазонов, при этом оценка канала содержит множество оценок частотных характеристик.
3. Способ по п.1, в котором выполнение спектрального оценивания оценки канала содержит определение доминантной частотной составляющей в оценке канала, и получение измеренного времени прихода на основании доминантной частотной составляющей.
4. Способ по п.1, дополнительно содержащий масштабирование временного рассогласования с коэффициентом усиления при этом временная поправка формируется на основании масштабированного временного рассогласования.
5. Способ по п.4, дополнительно содержащий настройку коэффициента усиления на основании, по меньшей мере, одного условия канала связи, при этом, по меньшей мере, одно условие содержит отношение сигнал/шум (SNR) принятого передаваемого сигнала, статическую обратную линию связи или быстро изменяющуюся обратную линию связи.
6. Способ по п.4, дополнительно содержащий настройку коэффициента усиления на основании режима работы, выбранного из множества режимов работы, состоящих из режима захвата и режима сопровождения.
7. Способ по п.6, дополнительно содержащий определение скорости сдвига в профиле канала, полученном из спектральной оценки; и настройку коэффициента усиления на основании скорости сдвига в профиле канала.
8. Способ по п.1, в котором формирование временной поправки на основании временного рассогласования содержит фильтрацию временного рассогласования, и получение временной поправки на основании отфильтрованного временного рассогласования.
9. Способ по п.1, дополнительно содержащий ограничение временной поправки для нахождения в предопределенном диапазоне значений.
10. Способ по п.1, в котором формирование временной поправки на основании временного рассогласования содержит
определение амплитуды временного рассогласования;
формирование временной поправки на основании первой функции, если амплитуда временного рассогласования находится в пределах предопределенного диапазона, и
формирование временной поправки на основании второй функции, если амплитуда временного рассогласования находится вне предопределенного диапазона, при этом первая функция - это линейная функция временного рассогласования и вторая функция - это нелинейная функция временного рассогласования.
11. Устройство для выполнения временной синхронизации в системе беспроводной связи множественного доступа, содержащее
узел измерения, предназначенный для измерения времени прихода передаваемого сигнала, принятого через канал связи, с использованием спектральной оценки, причем узел измерения содержит процессор пилот-сигнала, предназначенный для приема пилот-сигнала через канал связи и для извлечения оценки канала для канала связи; и
блок спектрального оценивания, предназначенный для выполнения спектрального оценивания оценки канала, для получения измеренного времени прихода для передаваемого сигнала;
сумматор, предназначенный для предоставления временного рассогласования между измеренным временем прихода и требуемым временем прихода для передаваемого сигнала; и
постпроцессор, предназначенный для формирования временной поправки на основании временного рассогласования.
12. Устройство по п.11, в котором процессор пилот-сигнала предназначен для вывода множества оценок частотных характеристик для множества наборов частотных поддиапазонов, при этом оценка канала содержит множество оценок частотных характеристик.
13. Устройство по п.12, в котором процессор пилот-сигнала предназначен для приема символов пилот-сигнала по каждому из множества наборов частотных поддиапазонов и для вывода оценки частотной характеристики для каждого набора частотных поддиапазонов на основании принятых символов пилот-сигнала для набора частотных поддиапазонов.
14. Устройство по п.12, в котором каждый набор частотных поддиапазонов включает в себя поднабор N совокупных частотных поддиапазонов в системе беспроводной связи множественного доступа, где N является целым числом, большим 1.
15. Устройство по п.12, в котором каждый набор частотных поддиапазонов включает в себя М последовательных частотных поддиапазонов в системе беспроводной связи множественного доступа, где М является целым числом, большим 1.
16. Устройство по п.12, в котором каждый набор частотных поддиапазонов включает в себя М частотных поддиапазонов, равномерно распределенных по N совокупным частотным поддиапазонам в системе беспроводной связи множественного доступа, где М и N являются целыми числами, большими 1, и М является меньшим чем N.
17. Устройство по п.12, в котором множество наборов частотных поддиапазонов определено псевдослучайной последовательностью, используемой для скачкообразного изменения частоты
18. Устройство по п.11, в котором процессор пилот-сигнала предназначен для приема широкополосного пилот-сигнала, переданного через канал связи и для вывода оценки канала на основании широкополосного пилот-сигнала.
19. Устройство по п.11, в котором блок спектрального оценивания предназначен для определения доминантной частотной составляющей в оценке канала и для вывода измеренного времени прихода на основании доминантной частотной составляющей.
20. Устройство по п.11, в котором блок спектрального оценивания предназначен для выполнения спектрального оценивания оценки канала с использованием метода многофакторного анализа сигналов (MUSIC), метода периодограмм, блока оценки Прони или метода гармонического разложения Писаренко.
21. Устройство по п.11, дополнительно содержащее
умножитель, предназначенный для масштабирования временного рассогласования с коэффициентом усиления, причем постпроцессор предназначен для формирования временной поправки на основании масштабированного временного рассогласования.
22. Устройство по п.21, в котором коэффициент усиления настраивается на основании, по меньшей мере, одного условия канала связи, при этом, по меньшей мере, одно условие содержит отношение сигнал/шум (SNR) принятого передаваемого сигнала, статическую обратную линию связи или быстро изменяющуюся обратную линию связи.
23. Устройство по п.21, в котором коэффициент усиления настраивается на основании отношения сигнал/шум (SNR) передаваемого сигнала.
24. Устройство по п.21, дополнительно содержащее
контроллер, предназначенный для выбора режима работы из множества режимов работы и для настройки коэффициента усиления на основании выбранного режима работы.
25. Устройство по п.11, дополнительно содержащее
фильтр, предназначенный для фильтрации временного рассогласования.
26. Устройство по п.11, в котором постпроцессор предназначен для ограничения временной поправки для нахождения в пределах предопределенного диапазона значений.
27. Устройство по п.11, в котором постпроцессор предназначен для определения амплитуды временного рассогласования для формирования временной поправки на основании первой функции, если амплитуда временного рассогласования находится в пределах предопределенного диапазона, и для формирования временной поправки на основании второй функций, если амплитуда временного рассогласования находится вне предопределенного диапазона, при этом первая функция - это линейная функция временного рассогласования и вторая функция - это нелинейная функция временного рассогласования.
28. Устройство по п.11, в котором постпроцессор предназначен для формирования временной поправки на основании временного рассогласования и в соответствии с контуром первого порядка для временной синхронизации.
29. Устройство по п.11, в котором постпроцессор предназначен для формирования временной поправки на основании временного рассогласования и в соответствии с контуром второго порядка для временной синхронизации.
30. Устройство по п.11, в котором система связи использует мультиплексирование с ортогональным частотным разделением каналов (OFDM).
31. Устройство по п.11, в котором система связи является системой множественного доступа с ортогональным частотным разделением каналов (OFDMA).
32. Устройство для выполнения временной синхронизации в системе беспроводной связи множественного доступа, содержащее
средство для измерения времени прихода передаваемого сигнала, принятого через канал связи, с использованием спектральной оценки, причем средство для измерения времени прихода передаваемого сигнала содержит
средство для получения оценки канала для канала связи; и средство для выполнения спектрального оценивания оценки канала для получения измеренного времени прихода для передаваемого сигнала,
средство для определения временного рассогласования между измеренным временем прихода и требуемым временем прихода для передаваемого сигнала и
средство для формирования временной поправки на основании временного рассогласования.
33. Устройство по п.32, в котором средство для получения оценки канала для канала связи содержит
средство для получения множества оценок частотных характеристик для множества наборов частотных поддиапазонов, при этом оценка канала содержит множество оценок частотных характеристик.
34. Устройство по п.32, в котором средство для выполнения спектрального оценивания оценки канала содержит
средство для определения доминантной частотной составляющей в оценке канала и
средство для выведения измеренного времени прихода на основании доминантной частотной составляющей.
35. Устройство по п.32, дополнительно содержащее
средство для масштабирования временного рассогласования с коэффициентом усиления, при этом временная поправка формируется на основании масштабированного временного рассогласования.
36. Устройство по п.32, дополнительно содержащее средство для ограничения временной поправки для нахождения в пределах предопределенного диапазона значений.
37. Способ измерения времени прихода в системе беспроводной связи множественного доступа, содержащий этапы, на которых
получают оценку канала для канала связи;
выполняют спектральное оценивание оценки канала для определения доминантной частотной составляющей в оценке канала и
выводят измеренное время прихода на основании доминантной частотной составляющей.
38. Способ по п.37, в котором получение оценки канала для канала связи состоит в том, что
получают множество оценок частотных характеристик для множества наборов частотных поддиапазонов, при этом оценка канала содержит множество оценок частотных характеристик.
39. Устройство для измерения времени прихода в системе беспроводной связи множественного доступа, содержащее
средство для получения оценки канала для канала связи;
средство для выполнения спектрального оценивания оценки канала для определения доминантной частотной составляющей в оценке канала и
средство для выведения измеренного времени прихода на основании доминантной частотной составляющей.
| Машина для штамповки заготовок | 1980 |
|
SU940942A1 |
| Устройство для ориентированной подачи толстолистового материала | 1986 |
|
SU1392015A1 |
| СИНХРОНИЗАЦИЯ ПОДВИЖНОЙ СТАНЦИИ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ | 1998 |
|
RU2202149C2 |
| СИНХРОНИЗАЦИЯ К БАЗОВОЙ СТАНЦИИ И ПОЛУЧЕНИЕ КОДА В СИСТЕМЕ СВЯЗИ С ПЕРЕДАЧЕЙ СИГНАЛА В ШИРОКОМ СПЕКТРЕ | 1998 |
|
RU2211531C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Охлаждаемый датчик теплового потока | 2024 |
|
RU2830389C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

