Изобретение относится к области техники сетей и касается способа эксплуатации беспроводной сети сенсоров и сенсорного узла, выполненного соответствующим образом для осуществления способа.
Сети сенсоров все в большей степени применяются для разнообразных задач контроля (мониторинга) в сложных средах, таких как промышленные крупномасштабные установки, электростанции, суда, самолеты, автомобили. В этом применении беспроводные сети сенсоров с множеством сенсорных узлов, осуществляющих беспроводную связь, оказались особенно практичными, так как сенсорные узлы могут размещаться по выбору в различных местах.
Беспроводные сети сенсоров управляются сетевым средством управления, которое, как правило, реализовано в управляющей станции (базовой станции), осуществляющей беспроводную связь с сенсорными узлами. Собранные сенсорными узлами данные передаются на управляющую станцию и могут оттуда передаваться для дальнейшей обработки на устройство обработки данных, связанное информационно-технически с базовой станцией.
Как правило, сенсорные узлы могут осуществлять беспроводную связь между собой и с базовой станцией, что типовым способом осуществляется путем ненаправленной радиопередачи. Если при этом сенсорный узел находится вне дальности действия радиосвязи с базовой станцией, то данные могут передаваться к управляющей станции через несколько сенсорных узлов посредством способа с множеством транзитных участков.
Каждый сенсорный узел сети сенсоров содержит по меньшей мере один чувствительный элемент датчика для снятия измеренных значений физических или технических измерительных параметров, таких как, например, температура воздуха или давление воздуха, устройство связи для передачи данных посредством ненаправленной радиопередачи, микропроцессорное управляющее устройство (центральный процессорный блок - CPU) для управления сенсорным узлом, а также автономный источник питания в форме батареи или подзаряжаемого аккумулятора.
Для того чтобы инсталлировать сеть сенсоров, требуется, чтобы сенсорные узлы конфигурировались, что обычно определяется как «инжиниринг» сети сенсоров. При конфигурировании сенсорного узла с ним сопоставляется идентификатор, то есть логический код опознавания, под которым сенсорный узел может идентифицироваться в сети и с помощью которого к нему можно обращаться. Идентификатор сенсорного узла представляет соединение с его аппаратным адресом (например, МАС-адресом). Кроме того, каждому сенсорному узлу при его конфигурировании назначается желательная функциональность, то есть одна или более конкретных функций, которые сенсорный узел должен исполнять в заданном месте. Кроме того, сенсорный узел при конфигурировании регистрируется в средстве сетевого управления, управляющем сетью сенсоров.
Если сеть сенсоров инициализирована, то конфигурированные сенсорные узлы могут избирательным образом срабатывать. В этом случае, например, возможно, что с помощью осуществляющего беспроводную связь мобильного управляющего устройства, например, в форме PDA (персональный цифровой помощник) с сенсорным узлом избирательно осуществляется связь локальным образом. Такое управляющее устройство обозначается также как человеко-машинный интерфейс (HMI).
На практике оказалось, что конфигурирование сенсорных узлов связано со значительными трудовыми затратами на инсталляцию и обслуживание беспроводных сетей сенсоров. Так как однозначное сопоставление трафика данных между определенным сенсорным узлом и мобильным управляющим устройством возможно только при конфигурированном сенсорном узле, то неконфигурированный сенсорный узел посредством ненаправленной радиопередачи может только тогда срабатывать избирательным образом, когда гарантировано, что на дальности действия радиосвязи нет никакого другого сенсорного узла. По этой причине сенсорные узлы до сих пор вне дальности действия радиосвязи с другими сенсорными узлами конфигурировались через панель программирования посредством ненаправленной радиопередачи, так как локально существует опасность того, что срабатывали бы другие сенсорные узлы, находящиеся в пределах дальности действия радиосвязи. Этот способ действий является, однако, громоздким и к тому же несет опасность того, что сенсорные узлы после конфигурирования могут быть перепутаны и смонтированы на неверных (не предусмотренных) местах монтажа. Контроль того, смонтированы ли сенсорные узлы на предусмотренном месте, возможен лишь косвенным образом через определение измеренных параметров. Чтобы, в частности, избежать монтажа сенсорных узлов на неправильных местах, было бы желательным, если бы конфигурирование сенсорных узлов могло осуществляться с применением мобильного управляющего устройства посредством ненаправленной радиопередачи локальным образом.
В уже инсталлированных сенсорных узлах может иметь место случай, когда сенсорные узлы должны ремонтироваться или заменяться, либо по причине отказа чувствительного элемента датчика, либо по причине разряда батареи. Это мероприятие технического обслуживания требует, как правило, нового или выполняемого впервые конфигурирования отремонтированного или замененного сенсорного узла, что, однако, ввиду вышеописанной проблемы не может осуществляться локальным образом. При протяженных сетях сенсоров, как, например, в промышленных крупномасштабных установках, это может, при обстоятельствах, привести к тому, что технический персонал должен проходить большие участки пути, чтобы сенсорный узел конфигурировать вне дальности действия радиосвязи других сенсорных узлов, из-за чего ненужным образом затрачивается рабочее время. В частности, для случая, когда сенсорный узел уже посредством простого мероприятия локально может быть вновь приведен в работоспособное состояние, например, путем замены чувствительного элемента датчика или батареи, которые, при необходимости, могут быть выполнены без демонтажа сенсорного узла, было бы желательным, если бы конфигурирование сенсорного узла могло быть проведено избирательно локальным образом посредством ненаправленной радиопередачи.
Из DE 10110776А1 известен способ для сопоставления мобильного устройства машине, который предназначен для передачи данных посредством ненаправленной радиопередачи. Согласно этому решению некоторая машина или робот сопоставляются портативному пульту управления через направленную передачу сигнала, после чего осуществляется передача данных на сопоставленное устройство через другой путь передачи, например, посредством радиопередачи. При этом предусмотрено активирование посредством сигнала, а также обеспечение вторых рабочих состояний, причем во втором рабочем состоянии посредством ненаправленной радиопередачи управляющие данные могут приниматься и обрабатываться, в то время как в первом рабочем состоянии управляющие данные не могут приниматься и обрабатываться.
Из DE известен способ для определения релевантных для функционирования данных агрегата, а также агрегат, имеющий исполнительный привод. При этом сходным образом, как и выше, предусмотрены два рабочих состояния.
В соответствии с этим задачей настоящего изобретения является предоставление способа эксплуатации беспроводной сети сенсоров, которая обеспечивает возможность избирательного конфигурирования сенсорного узла посредством ненаправленной радиопередачи и в том случае, когда в пределах дальности действия радиосвязи находятся другие сенсорные узлы.
Эта и другие задачи в соответствии с изобретением решаются посредством способа эксплуатации беспроводной сети сенсоров с признаками независимых пунктов формулы изобретения. Предпочтительные выполнения изобретения охарактеризованы признаками зависимых пунктов формулы изобретения.
В соответствии с изобретением представлен способ эксплуатации беспроводной сети сенсоров. Сеть сенсоров, подходящая для выполнения соответствующего изобретению способа, содержит множество сенсорных узлов, осуществляющих беспроводную связь. Они могут, при управлении посредством реализованного в сети сенсоров средства сетевого управления, обмениваться данными беспроводным способом между собой и с базовой станцией. Собираемые сенсорными узлами данные могут передаваться на базовую станцию и там анализироваться и передаваться на другое устройство обработки данных для их обработки.
Каждый сенсорный узел сети сенсоров содержит также по меньшей мере один чувствительный элемент датчика для получения измеренных значений физических или технических параметров, устройство связи для передачи данных посредством ненаправленной радиопередачи между сенсорным узлом другим сенсорным узлом или базовой станцией, микропроцессорное управляющее устройство для управления функциональными средствами сенсорного узла, а также автономный источник питания в форме батареи или заряжаемого аккумулятора.
Соответствующий изобретению способ эксплуатации сети сенсоров дополнительно предусматривает, что содержащее по меньшей мере один сенсорный узел выбранное количество сенсорных узлов сети сенсоров посредством сформированного датчиком сигнала, беспроводно переданного первого сигнала управления рабочими состояниями, который пространственно ограничен таким образом, что он поступает только на сенсорные узлы, содержащиеся в упомянутом выбранном количестве, могут избирательно переводиться из первого рабочего состояния во второе рабочее состояние.
Сенсорные узлы выполнены таким образом, что они только во втором рабочем состоянии посредством ненаправленной радиопередачи могут принимать и обрабатывать управляющие данные, в то время как в первом рабочем состоянии посредством ненаправленной радиопередачи управляющие данные не могут принимать или по меньшей мере не могут их обрабатывать. Так как сенсорные узлы часто могут активизироваться лишь несколько раз на несколько секунд за сутки, а в остальное время находятся в энергосберегающем дежурном состоянии, первый сигнал управления рабочими состояниями может служить в качестве активирующего сигнала, чтобы сенсорный узел активировать вне предусмотренной последовательности.
Первый сигнал управления рабочими состояниями служит для управления рабочими состояниями сенсорных узлов, то есть для переключения между возможными рабочими состояниями сенсорных узлов. Поэтому первый сигнал управления рабочими состояниями отличается по своим свойствам от сенсорных данных, которые передаются между сенсорными узлами или между сенсорным узлом и базовой станцией.
Управляющие данные, переданные посредством ненаправленной радиопередачи на сенсорные узлы, служат для управления функциональным средствами сенсорного узла, причем посредством управляющих данных, в частности, может осуществляться вышеупомянутое конфигурирование сенсорного узла, то есть назначение идентификатора и регистрация сенсорного узла в средстве сетевого управления. Управляющие данные отличаются, таким образом, по своим свойствам, от первого сигнала управления рабочими состояниями и от сенсорных данных, которые передаются между сенсорными узлами или между сенсорным узлом и базовой станцией.
Соответствующий изобретению способ впервые обеспечивает возможность избирательной передачи управляющих данных на смонтированный в заданном месте (месте монтажа), но еще не конфигурированный сенсорный узел посредством ненаправленной радиопередачи, чтобы, например, конфигурировать сенсорный узел локально, и при этом отсутствует опасность того, что другие сенсорные узлы в пределах дальности действия радиосвязи будут срабатывать на эту радиопередачу.
Согласно дополнительному признаку соответствующего изобретению способа предусмотрено, что сенсорные узлы сети сенсоров посредством передаваемого с помощью ненаправленной радиопередачи второго сигнала управления рабочими состояниями переводятся из третьего рабочего состояния в первое рабочее состояние, причем сенсорные узлы в третьем рабочем состоянии не могут принимать первый сигнал управления рабочими состояниями или по меньшей мере не могут его обрабатывать, а в первом рабочем состоянии могут принимать и обрабатывать первый сигнал управления рабочими состояниями.
Другие варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения.
Согласно выполнению соответствующего изобретению способа предусмотрено, что сенсорный узел в течение предварительно устанавливаемого второго интервала времени остается в первом рабочем состоянии и по прошествии второго интервала времени самостоятельно возвращается в третье рабочее состояние.
Согласно выполнению соответствующего изобретению способа предусмотрено, что сенсорный узел, находящийся в первом рабочем состоянии при приеме второго сигнала управления рабочими состояниями, переводится в третье рабочее состояние. За счет этой меры может достигаться то, что сенсорные узлы остаются в первом рабочем состоянии лишь в течение ограниченного интервала времени.
В предпочтительном выполнении соответствующего изобретению способа первый сигнал управления рабочими состояниями передается посредством направленного электромагнитного излучения, при котором речь может идти, например, о передаче направленных радиолокационных сигналов или о передаче направленных сигналов радиосвязи (направленная радиосвязь), например, на частоте 60 ГГц или о передаче направленных оптических сигналов (световое излучение) в видимом диапазоне длин волн.
Если передача первого сигнала управления рабочими состояниями осуществляется, например, с помощью направленной радиосвязи, то устройство связи для беспроводной радиопередачи сенсорных узлом может также использоваться для приема первого сигнала управления рабочими состояниями. В качестве альтернативы возможно, что сенсорные узлы оснащены отдельным приемным устройством для приема первого сигнала управления рабочими состояниями, передаваемого посредством направленной радиосвязи.
Это выполнение соответствующего изобретению способа обеспечивает возможность особенно простой технической реализации соответствующего изобретению способа, причем электромагнитное излучение, сформированное датчиком сигнала, например мобильным управляющим устройством, может простым способом направляться на выбираемый сенсорный узел, чтобы избирательным образом перевести сенсорный узел из первого рабочего состояния во второе рабочее состояние.
Если первый сигнал управления рабочими состояниями передается в форме направленного оптического сигнала, например в форме лазерного луча или сфокусированного светового луча, то предпочтительным образом попадание направленного оптического сигнала на выбранный сенсорный узел может оптически контролироваться.
При альтернативном этому выполнении соответствующего изобретению способа первый сигнал управления рабочими состояниями, вместо направленного электромагнитного излучения, передается с помощью ненаправленного (диффузного) электромагнитного излучения, причем электромагнитное излучение передается внутри пространственно ограничивающей электромагнитное излучение области, так что электромагнитное излучение и в этом случае является пространственно ограниченным, и сенсорные узлы, находящиеся в пределах пространственно ограниченной области, могут избирательным образом переводиться из первого рабочего состояния во второе рабочее состояние.
Например, первый сигнал управления рабочими состояниями передается с помощью диффузного света (например, потолочного освещения) в оптически ограниченной области, благодаря чему все находящиеся внутри оптически ограниченной области сенсорные узлы избирательно переводятся во второе рабочее состояние.
Эта форма выполнения обеспечивает возможность еще одной особенно простой технической реализации соответствующего изобретению способа, при которой сенсорные узлы, находящиеся внутри оптически ограниченной области, могут переводиться из первого рабочего состояния во второе рабочее состояние. Оптически ограниченная область реализуется в том случае, когда желательное выбранное количество сенсорных узлов оптически экранировано от сенсорных узлов.
Для случая, когда первый сигнал управления рабочими состояниями передается в форме направленного светового луча или, альтернативно, в форме ненаправленного (диффузного) света в оптически ограниченной области, сенсорные узлы для приема оптического сигнала снабжены оптоэлектронным преобразователем (например, фотодиодом).
Для случая, когда первый сигнал управления рабочими состояниями передается в форме направленного светового луча или, альтернативно, в форме ненаправленного (диффузного) света в оптически ограниченной области, дополнительно может быть предпочтительным, если первый сигнал управления рабочими состояниями модулируется выбираемым кодом опознавания сигнала управления, который может демодулироваться сенсорным узлом, принимающим первый сигнал управления рабочими состояниями. При этом сенсорные узлы выполнены таким образом, что сенсорный узел только тогда переводится во второе рабочее состояние, если первый сигнал управления рабочими состояниями снабжен кодом опознавания сигнала управления, и не переводится во второе рабочее состояние, если первый сигнал управления рабочими состояниями не снабжен кодом опознавания сигнала управления. За счет такой модуляции можно предпочтительным образом избегать того, что случайные колебания света или также регулярные модуляции света, как они являются типичными, например, в люминесцентных лампах, ошибочно интерпретируются как первый сигнал управления рабочими состояниями. Так модуляция света люминесцентных ламп происходит на определенных частотах. Если свет на поднесущей модулирован частотой, отличающейся от таких частот, то он может без помех приниматься и демодулироваться. Другим подходящим для этого способом является, например, CDMA (множественный доступ с кодовым разделением).
В другом предпочтительном выполнении соответствующего изобретению способа, вместо модулирующего сигнального кода опознавания, определяется спектральное свойство первого сигнала управления рабочими состояниями, причем сетевой узел только тогда переводится во второе рабочее состояние, если спектральное свойство первого сигнала управления рабочими состояниями соответствует предварительно устанавливаемому спектральному свойству для первого сигнала управления рабочими состояниями, а в противном случае не переводится во второе рабочее состояние, если спектральное свойство первого сигнала управления рабочими состояниями не соответствует предварительно устанавливаемому спектральному свойству для первого сигнала управления рабочими состояниями. В этом случае используется спектральная характеристика света, чтобы избежать его ложной интерпретации как первого сигнала управления рабочими состояниями. Так, например, люминесцентные лампы излучают в ближнем инфракрасном спектральном диапазоне сравнительно слабо, так что связь с использованием ближнего инфракрасного спектрального диапазона может осуществляться в значительной степени без помех.
В другом предпочтительном выполнении соответствующего изобретению способа в сенсорном узле электрическая энергия получается из первого сигнала управления рабочими состояниями. Это имеет преимущество, заключающееся в том, что сенсорный узел может запитываться энергией извне, чтобы, например, зарядить его аккумулятор. Сенсорные узлы с этой целью снабжены средствами (например, панелями солнечных батарей) для получения энергии из первого сигнала управления рабочими состояниями, переданного в форме света. Если первый сигнал управления рабочими состояниями передается, например, в форме направленного светового луча, модулированного сигнальным кодом опознавания, то составляющая постоянного тока (DC) светового потока может использоваться для получения энергии, а его составляющая переменного тока (АС) - для передачи информации.
В другом предпочтительном выполнении соответствующего изобретению способа первый сигнал управления рабочими состояниями передается посредством направленных звуковых волн. В качестве альтернативы этому, первый сигнал управления рабочими состояниями может также посылаться посредством ненаправленных звуковых волн в акустически ограниченной области. За счет этого обеспечивается возможность простой технической реализации соответствующего изобретению способа. Сенсорные узлы в этом случае для приема акустических сигналов снабжены акустоэлектронным преобразователем.
В другом предпочтительном выполнении соответствующего изобретению способа сенсорный узел после приема первого сигнала управления рабочими состояниями посылает сигнал подтверждения посредством ненаправленной радиопередачи. Посредством этой меры может гарантироваться, что сенсорный узел действительно переведен из первого рабочего состояния во второе рабочее состояние, чтобы затем посредством ненаправленной радиопередачи выполнить, например, конфигурирование сенсорного узла. Особенно предпочтительным образом первый сигнал управления рабочими состояниями передается при этом от датчика сигнала (например, мобильного управляющего устройства) в форме очень короткого сигнального импульса, а сигнал подтверждения принимается датчиком сигнала с разрешением по времени. Благодаря такому режиму можно предпочтительным образом различать, поступил ли первый сигнал управления рабочими состояниями к сенсорному узлу по прямому пути или не по прямому пути вследствие отражений. Например, с этой целью датчик сигнала обрабатывает исключительно первый принятый сигнал подтверждения, а позже поступившие сигналы подтверждения отбрасывает. При этом, в частности, может применяться также известная техника модуляции расширенного спектра.
В другом предпочтительном выполнении соответствующего изобретению способа сенсорный узел остается в течение предварительно устанавливаемого первого интервала времени во втором рабочем состоянии и по прошествии первого интервала времени самостоятельно переходит в первое рабочее состояние. За счет этого может достигаться то, что сенсорный узел активируется только на выбираемый интервал времени для приема управляющих данных посредством ненаправленной радиопередачи.
В альтернативном этому выполнении соответствующего изобретению способа сенсорный узел, находящийся во втором рабочем состоянии, при приеме следующего первого сигнала управления рабочими состояниями, переводится в первое рабочее состояние. За счет этого режима сенсорный узел может простым способом инактивироваться для приема управляющих данных посредством ненаправленной радиопередачи.
В другом предпочтительном выполнении соответствующего изобретению способа сенсорная функция сенсорных узлов может посредством первого сигнала управления рабочими состояниями включаться и выключаться, так что активизируемый только в течение относительно коротких промежутков времени сенсорный узел предпочтительным образом может активироваться для сбора данных вне предусмотренной последовательности.
В другом предпочтительном выполнении соответствующего изобретению способа первый сигнал управления рабочими состояниями и/или второй сигнал управления рабочими состояниями посылается от мобильного управляющего устройства в качестве датчика сигнала, что предоставляет преимущество очень простого локального конфигурирования сенсорных узлов.
Изобретение также относится к сенсорному узлу сети сенсоров, который снабжен по меньшей мере одним чувствительным элементом датчика (сенсором) для сбора данных, устройством связи (передатчиком-приемником) для передачи данных посредством ненаправленной радиопередачи и микропроцессорным программируемым управляющим устройством для управления сенсорным узлом, при котором управляющее устройство выполнено с возможностью осуществления способа, как описано выше.
Изобретение далее поясняется более подробно на примере выполнения со ссылками на чертежи.
Фиг.1 схематично иллюстрирует сеть сенсоров, сенсорные узлы которой конфигурируются мобильным управляющим устройством.
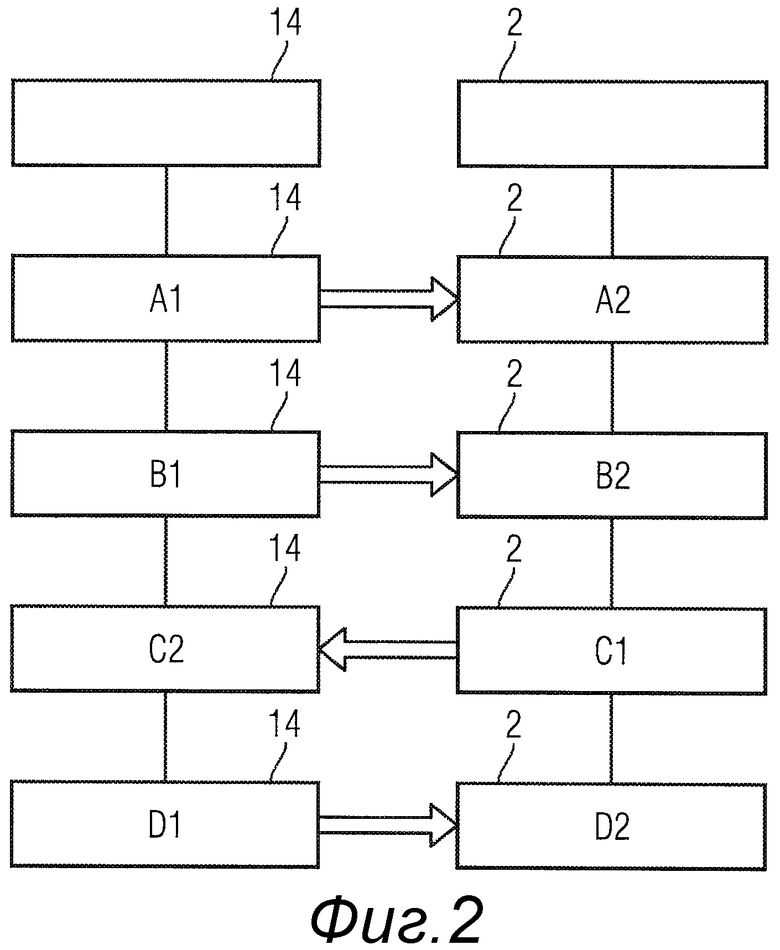
Фиг.2 - схематичная диаграмма конфигурирования сенсорных узлов сети сенсоров по фиг.1.
На фиг.1 схематично показана сеть 1 сенсоров. Сеть 1 сенсоров содержит множество сенсорных узлов аналогичной структуры, из которых на фиг.1 показано только три соседних сенсорных узла 2-4. Сенсорные узлы 20-4 смонтированы в различных местах, например, промышленной крупномасштабной установки (на фиг.1 подробно не показано).
Каждый сенсорный узел 2-4 содержит в корпусе 18 несколько чувствительных элементов датчиков (сенсоров) 5, которые могут получать измеренные значения физических или технических измеряемых параметров, в данном случае, например, температуры воздуха и влажности воздуха. Кроме того, каждый сенсорный узел 2-4 содержит управляемое программой микропроцессорное управляющее устройство (CPU) 7 для управления функциями сенсорных узлов. CPU 7 взаимодействует с двумя запоминающими устройствами, энергозависимым оперативным запоминающим устройством (RAM = память с произвольным доступом) 8 и энергонезависимой флэш-памятью 9. Кроме того, каждый сенсорный узел 2-4 снабжен приемопередатчиком (передатчиком-приемником) 6 для передачи данных посредством ненаправленной радиопередачи через первую радиоантенну 13. Частота передачи для радиопередачи составляет, например, 60 ГГц. Посредством автономного энергопитания в форме батареи 10 каждый сенсорный узел 2-4 снабжается электрической энергией.
Сенсорные узлы 2-4 сети 1 сенсоров могут обмениваться данными друг с другом и с не показанной на фиг.1 базовой станцией или мобильным управляющим устройством 14 для конфигурирования сенсорных узлов посредством ненаправленной радиопередачи через радиоантенну 13.
Конфигурирование сенсорных узлов 2-4 может осуществляться локально посредством управляющего устройства 14, которое может осуществлять беспроводную связь с сенсорными узлами 2-4 и для этого снабжено не показанным на чертеже приемопередатчиком, который обеспечивает возможность ненаправленной радиопередачи через вторую радиоантенну 15.
Для того чтобы избирательно задействовать сенсорный узел, мобильное управляющее устройство 14 снабжено устройством формирования светового луча, в данном случае в форме лазерного диода 16, посредством которого может формироваться видимый лазерный луч 17 с длиной волны в диапазоне длин волн примерно от 640 нм до 660 нм.
Соответствующим образом каждый сенсорный узел 2-4 снабжен устройством приема светового луча, в данном случае в форме фотодиода 12, посредством которого лазерный луч 17, переданный управляющим устройством 14, может приниматься и преобразовываться в электрический сигнал. Фотодиод 12 может управляться от интерфейса контроля, информационно-технически связанного с CPU 7.
Если мобильное управляющее устройство 14 позиционировано таким образом, что формируемый управляющим устройством 14 лазерный луч 17 попадает на фотодиод 12 желательного сенсорного узла, то сенсорный узел может избирательным образом срабатывать. На фиг.1 это показано в качестве примера для первого сенсорного узла 2.
Далее описан пример выполнения соответствующего изобретению способа со ссылкой на фиг.2.
В данном примере выполнения осуществляется конфигурирование сенсорных узлов 2-4, которое описано на примере конфигурирования первого сенсорного узла 2. Все сенсорные узлы 2-4 находятся на дальности действия радиосвязи с мобильным управляющим устройством 14. В блок-схеме способа по фиг.2 левые блоки относятся к этапам способа, которые выполняются управляющим устройством 14, а правые блоки относятся к этапам способа, которые выполняются первым сенсорным узлом 2.
Сенсорные узлы сети 1 сенсоров программируются таким образом, что они только несколько раз на несколько секунд в сутки активируются, в этом активном состоянии собирают данные измеряемых параметров, и эти данные передают посредством активного приемопередатчика 6 на базовую станцию. Помимо этого, сенсорные узлы находятся в пассивном состоянии, в котором они не собирают данные измеряемых параметров, и приемопередатчик 6 является неактивным.
К тому же все сенсорные узлы 2-4 в начале конфигурирования находятся в состоянии (во вводной части описания обозначенном как третье рабочее состояние), в котором их фотодиоды 12 инактивированы, то есть никакие оптические сигналы не могут приниматься фотодиодами 12 и обрабатываться.
Чтобы конфигурировать первый сенсорный узел 2, мобильное управляющее устройство сначала на подготовительном этапе посредством ненаправленной радиопередачи формирует список всех сенсорных узлов 2-4, находящихся на дальности радиосвязи. Затем на следующем подготовительном этапе мобильным управляющим устройством 14 посредством ненаправленной радиопередачи через вторую радиоантенну 15 передается ненаправленный радиосигнал (во вводной части описания обозначенный как второй сигнал управления рабочими состояниями) на сенсорные узлы 2-4, с помощью которого обеспечивается то, что сенсорные узлы 2-4 переводятся в рабочее состояние (во вводной части описания обозначенном как первое рабочее состояние) для приема оптического сигнала, причем фотодиоды 12 сенсорных узлов 2-4 активируются для приема оптического сигнала.
Затем лазерный луч 17, формируемый лазерным диодом 16 мобильного управляющего устройства 14, направляется на первый сенсорный узел 2, точнее на его фотодиод 12 (этап А1). Точное попадание лазерного луча 17 на фотодиод 12 может оптически контролироваться. Формирование лазерного луча 17 посредством лазерного диода 16 управляющего устройства 12 может осуществляться посредством клавишного переключателя 19.
Первый сенсорный узел 2 принимает лазерный луч 17 своим фотодиодом 12 (этап А2), следствием чего является то, что приемопередатчик 6 активируется для ненаправленной радиопередачи управляющих данных (здесь данных конфигурирования). Направленный на фотодиод 12 первого сенсорного узла 2 и принимаемый фотодиодом 12 лазерный луч 17 действует, таким образом, как сигнал (во вводной части описания обозначенный как первый сигнал управления рабочими состояниями), посредством которого первый сенсорный узел 2 из своего первого рабочего состояния, в котором приемопередатчик 6 неактивен, переводится во второе рабочее состояние, в котором приемопередатчик 6 активирован, но сенсоры не активированы.
Затем первый сенсорный узел 2 посылает посредством ненаправленной радиопередачи через свою первую радиоантенну 13 запрос идентификации (этап В1) в качестве запроса на передачу идентификатора, который принимается через вторую радиоантенну 15 приемопередатчика мобильного управляющего устройства 14 (этап В2).
После этого первый сенсорный узел 2 посылает посредством ненаправленной радиопередачи через свою первую радиоантенну 13 идентификатор, сохраненный во флэш-памяти 9 (этап С1), который принимается приемопередатчиком мобильного управляющего устройства 14 через вторую радиоантенну 15 (этап С2).
Это вызывает то, что мобильное управляющее устройство 14 посредством ненаправленной радиопередачи через свою вторую радиоантенну 15 посылает спецификацию сенсорного узла (этап D1), в которой установлено, какой чувствительный элемент датчика должен быть активным. К тому же с первым сенсорным узлом 2 сопоставлено выбираемое место измерения. Спецификация сенсорного узла принимается первым сенсорным узлом 2 (этап D2), причем переданные при этом данные сохраняются во флэш-памяти 9.
С помощью описанного процесса первый сенсорный узел 2 может простым способом избирательно локально конфигурироваться, не создавая опасности того, что второй сенсорный узел 3 или третий сенсорный узел 4, которые оба находятся в пределах дальности радиосвязи, непреднамеренно сработают.
Конфигурирование второго или третьего сенсорного узла может осуществляться соответственно конфигурированию первого сенсорного узла 2. Для этого только требуется, чтобы лазерный луч 17, сформированный управляющим устройством, направлялся на фотодиод 12 конфигурируемого сенсорного узла, благодаря чему активируется соответствующий сенсорный узел. Все другие этапы выполняются аналогичным образом, как описано выше для первого сенсорного узла 2.
В описанном примере выполнения соответствующего изобретению способа возможны многочисленные модификации.
Например, было бы возможным, что управляющим устройством 14 вместо оптического сигнала, генерируемого лазерным диодом 16, формируется направленное электромагнитное излучение отличающейся частоты, например, излучаемый радиолокационной антенной радиолокационный сигнал или излучаемый антенной направленной радиосвязи сигнал направленной радиосвязи, который направляется на конфигурируемый сенсорный узел, чтобы сенсорный узел перевести из первого рабочего состояния во второе рабочее состояние. Так мог бы, например, сигнал направленной радиосвязи приниматься первыми радиоантеннами 13 сенсорных узлов 2-4 или отдельными от них радиоантеннами.
Кроме того, в качестве альтернативы, было бы возможным, что управляющим устройством 14 посредством акустического датчика сигнала формируется направленный звуковой сигнал, который направляется на конфигурируемый сенсорный узел, чтобы перевести сенсорный узел из первого рабочего состояния во второе рабочее состояние. Сенсорные узлы с этой целью снабжены акустоэлектронными преобразователями для приема звуковых волн и их преобразования в электрические сигналы.
Кроме того, в качестве альтернативы, было бы возможным, что сенсорные узлы не посредством направленного электромагнитного излучения, а посредством ненаправленного (диффузного) электромагнитного излучения переводятся из первого рабочего состояния во второе рабочее состояние. Предпосылкой для этого является то, что избирательно конфигурируемые сенсорные узлы находятся внутри области, пространственно ограничивающей электромагнитное излучение. В показанном примере выполнения для отдельного конфигурирования сенсорных узлов при выдаче оптического сигнала потребовалось бы, чтобы сенсорные узлы находились бы по отдельности в оптически плотной среде. В этом случае сенсорные узлы могли бы соответственно избирательным образом за счет диффузного потолочного освещения переводиться из первого рабочего состояния во второе рабочее состояние. Диффузный свет мог бы посредством фотодиодов 12 приниматься и обрабатываться. Аналогичным образом, также было бы возможным, что множество сенсорных узлов посредством диффузного света переводятся во второе рабочее состояние.
В этом случае сенсорные узлы 2-4 могли бы дополнительно снабжаться средствами для определения спектрального свойства диффузного потолочного освещения, причем сенсорные узлы переводятся только тогда во второе рабочее состояние, когда спектральное свойство потолочного освещения согласуется с предварительно установленным спектральным свойством. В качестве альтернативы этому, свет мог бы модулироваться сигнальным кодом опознавания, причем сенсорные узлы только тогда переводятся из первого рабочего состояния во второе рабочее состояние, когда сигнальный код опознавания согласуется с предварительно установленным сигнальным кодом опознавания. Кроме того, сенсорные узлы 2-4 могли бы соответственно снабжаться фотодиодом, посредством которого электрическая энергия могла бы получаться из поступающего света.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ХРАНЕНИЯ КОНТЕКСТОВ UE В СЕТИ РАДИОДОСТУПА ДЛЯ НЕАКТИВНОГО ПОЛЬЗОВАТЕЛЬСКОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2712427C1 |
| СИСТЕМЫ, УСТРОЙСТВА И СПОСОБЫ ДЛЯ ОБРАБОТКИ ОТКАЗОВ ЛИНИИ РАДИОСВЯЗИ В БЕСПРОВОДНЫХ РЕТРАНСЛЯЦИОННЫХ СЕТЯХ | 2019 |
|
RU2770842C1 |
| СЕНСОРНЫЕ СЕТИ НА ОСНОВЕ БЕСПРОВОДНЫХ УСТРОЙСТВ | 2011 |
|
RU2547449C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ДАННЫХ МЕЖДУ СЕНСОРНОЙ СИСТЕМОЙ И ПРИЕМНИКОМ И СИСТЕМА ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ДАННЫХ | 2017 |
|
RU2714485C1 |
| СЕНСОРНЫЕ СЕТИ НА ОСНОВЕ БЕСПРОВОДНЫХ УСТРОЙСТВ | 2007 |
|
RU2439847C2 |
| СЕТЬ, ВКЛЮЧАЮЩАЯ БАЗОВУЮ СТАНЦИЮ, НАХОДЯЩУЮСЯ В ЧАСТНОМ ВЛАДЕНИИ И СОЕДИНЕННУЮ С ОБЩЕДОСТУПНЫМ СЕТЕВЫМ ЭЛЕМЕНТОМ | 2009 |
|
RU2453074C1 |
| СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ, ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И АУТЕНТИФИКАЦИИ | 2016 |
|
RU2721997C2 |
| АРХИТЕКТУРА БЕСПРОВОДНОГО СЕНСОРНОГО УЗЛА С АВТОНОМНОЙ ПОТОКОВОЙ ПЕРЕДАЧЕЙ ДАННЫХ | 2009 |
|
RU2507571C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Способ сбора телеметрической информации о состоянии объектов РКТ при транспортировании с помощью беспроводной сенсорной сети ZigBee | 2018 |
|
RU2708796C2 |
Изобретение относится к средствам эксплуатации беспроводной сети сенсоров с множеством сенсорных узлов. Технический результат заключается в обеспечении возможности избирательного конфигурирования сенсорного узла, когда в пределах дальности радиосвязи находятся другие сенсорные узлы. Сенсорные узлы выполнены с возможностью передачи данных посредством ненаправленной радиопередачи, причем содержащее по меньшей мере один сенсорный узел выбранное количество сенсорных узлов посредством пространственно ограниченного первого сигнала управления рабочими состояниями может избирательно переводиться из первого рабочего состояния во второе рабочее состояние, причем сенсорные узлы в первом рабочем состоянии не могут принимать управляющие данные посредством ненаправленной радиопередачи или по меньшей мере не могут их обрабатывать, а во втором рабочем состоянии могут принимать управляющие данные посредством ненаправленной радиопередачи и обрабатывать. 2 н. и 15 з.п. ф-лы, 2 ил.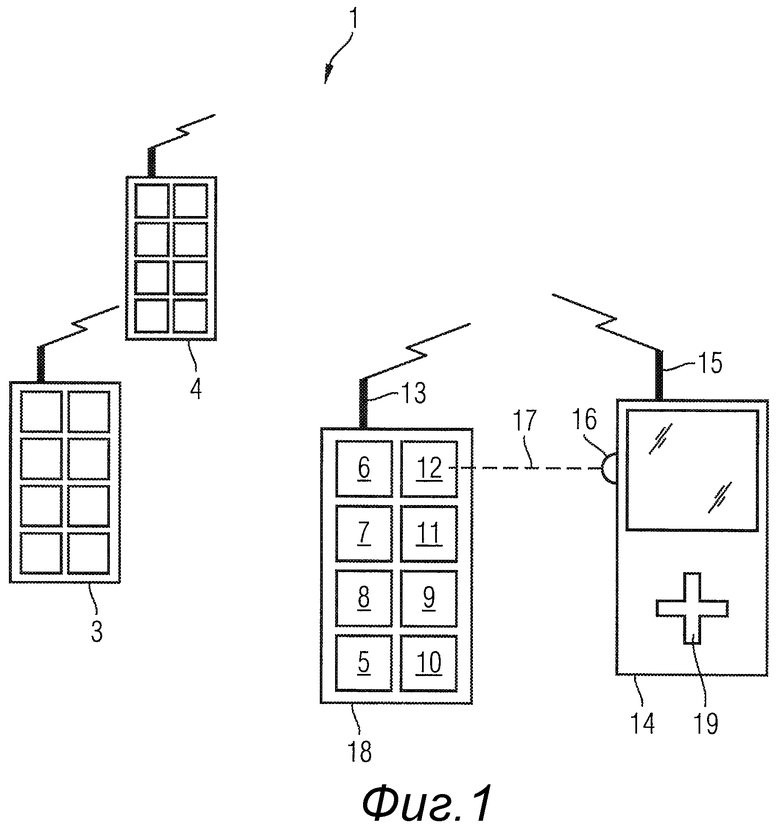
1. Способ эксплуатации беспроводной сети (1) сенсоров с множеством сенсорных узлов (2-4), которые выполнены с возможностью передачи данных посредством ненаправленной радиопередачи, причем содержащее по меньшей мере один сенсорный узел (2) выбранное количество сенсорных узлов посредством пространственно ограниченного первого сигнала (17) управления рабочими состояниями может избирательно переводиться из первого рабочего состояния во второе рабочее состояние, причем сенсорные узлы (2-4) в первом рабочем состоянии не могут принимать управляющие данные посредством ненаправленной радиопередачи или по меньшей мере не могут их обрабатывать, а во втором рабочем состоянии могут принимать управляющие данные посредством ненаправленной радиопередачи и обрабатывать, и причем сенсорные узлы сети сенсоров могут посредством второго сигнала управления рабочими состояниями переводиться из третьего рабочего состояния в первое рабочее состояние, причем сенсорные узлы в третьем рабочем состоянии не могут принимать первый сигнал управления рабочими состояниями или по меньшей мере не могут обрабатывать его, а в первом рабочем состоянии могут принимать и обрабатывать первый сигнал управления рабочими состояниями.
2. Способ по п.1, отличающийся тем, что сенсорный узел в течение предварительно устанавливаемого второго интервала времени остается в первом рабочем состоянии и по прошествии второго интервала времени самостоятельно переводится в третье рабочее состояние.
3. Способ по п.1, отличающийся тем, что сенсорный узел, находящийся в первом рабочем состоянии, при приеме второго сигнала управления рабочими состояниями переводится в третье рабочее состояние.
4. Способ по п.1, отличающийся тем, что первый сигнал управления рабочими состояниями передается в форме диффузного электромагнитного излучения внутри пространственно ограничивающей электромагнитное излучение области.
5. Способ по п.4, отличающийся тем, что первый сигнал управления рабочими состояниями передается в форме диффузной передачи света в оптически ограниченной области.
6. Способ по любому из пп.1-5, отличающийся тем, что первый сигнал управления рабочими состояниями модулируется выбираемым кодом опознавания сигнала управления, который демодулируется сенсорным узлом, принимающим первый сигнал управления рабочими состояниями, при этом сенсорный узел переводится во второе рабочее состояние, если первый сигнал управления рабочими состояниями снабжен кодом опознавания сигнала управления, и не переводится во второе рабочее состояние, если первый сигнал управления рабочими состояниями не снабжен кодом опознавания сигнала управления.
7. Способ по п.5, отличающийся тем, что в сенсорном узле определяется спектральное свойство первого сигнала управления рабочими состояниями, передаваемого в форме видимого света, причем сенсорный узел переводится во второе рабочее состояние, если спектральное свойство первого сигнала управления рабочими состояниями соответствует предварительно устанавливаемому спектральному свойству для первого сигнала управления рабочими состояниями, и не переводится во второе рабочее состояние, если спектральное свойство первого сигнала управления рабочими состояниями не соответствует предварительно устанавливаемому спектральному свойству для первого сигнала управления рабочими состояниями.
8. Способ по п.5, отличающийся тем, что в сенсорном узле электрическая энергия получается из первого сигнала управления рабочими состояниями, передаваемого в форме света.
9. Способ по п.1, отличающийся тем, что первый сигнал управления рабочими состояниями передается посредством ненаправленных звуковых волн в акустически ограниченной области.
10. Способ по любому из пп.1-5, 7-9, отличающийся тем, что сенсорный узел после приема первого сигнала управления рабочими состояниями посылает сигнал подтверждения посредством ненаправленной радиопередачи.
11. Способ по п.10, отличающийся тем, что первый сигнал управления рабочими состояниями передается от датчика сигнала в форме сигнального импульса и осуществляется прием сигнала подтверждения датчиком сигнала с разрешением по времени.
12. Способ по любому из пп.1-5, 7-9, 11, отличающийся тем, что сенсорный узел остается в течение предварительно устанавливаемого первого интервала времени во втором рабочем состоянии и по прошествии первого интервала времени самостоятельно переходит в первое рабочее состояние.
13. Способ по п.12, отличающийся тем, что сенсорный узел, находящийся во втором рабочем состоянии, при приеме первого сигнала управления рабочими состояниями переводится в первое рабочее состояние.
14. Способ по любому из пп.1-5, 7-9, 11, 13, отличающийся тем, что сенсорные узлы могут посредством первого сигнала управления рабочими состояниями переключаться между сенсорно-пассивным состоянием, в котором они не собирают никаких данных, и сенсорно-активным состоянием, в котором они собирают данные.
15. Способ по любому из пп.1-5, 7-9, 11, 13, отличающийся тем, что первый сигнал управления рабочими состояниями посылается от мобильного управляющего устройства в качестве датчика сигнала.
16. Способ по любому из пп.1-5, 7-9, 11, 13, отличающийся тем, что второй сигнал управления рабочими состояниями посылается от мобильного управляющего устройства в качестве датчика сигнала.
17. Сенсорный узел (2-4), который снабжен по меньшей мере одним сенсором (5) для сбора данных, передатчиком-приемником (6) для передачи данных посредством ненаправленной радиопередачи и микропроцессорным управляющим устройством (7) для управления сенсорным узлом, в котором управляющее устройство (7) выполнено с возможностью осуществления способа по любому из пп.1-16.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ одновременной электроэрозионной обработки взаимно сопрягаемых деталей | 1991 |
|
SU1780951A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЗОВОЙ СТАТИЧЕСКОЙ ГРУЗОПОДЪЕМНОСТИ РОЛИКОВОГО ПОДШИПНИКА КАЧЕНИЯ | 2007 |
|
RU2350919C1 |
| KR 100644280 B1, 02.11.2006 | |||
| ОБРАБОТКА ДАННЫХ В БЕСПРОВОДНОЙ СЕТИ | 2002 |
|
RU2297101C2 |

