ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к хирургическим системам и способам. В частности, настоящее изобретение относится к системе для измерения уровня текучей среды в хирургической кассете, применяемой в офтальмологической хирургической системе.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Человеческий глаз может страдать рядом болезней, вызывающих нарушения зрения от незначительного ослабления до полной потери. Хотя контактные линзы и очки могут компенсировать некоторые расстройства, другие требуют офтальмологического хирургического вмешательства. Обычно офтальмологическую хирургию классифицируют на процедуры на заднем сегменте, например витреретинальную хирургию, и процедуры на переднем сегменте, например хирургию катаракты. В последнее время разработаны комбинированные процедуры на переднем и заднем сегментах.
Хирургический инструментарий, применяемый для офтальмологической хирургии, может быть специализированным для процедур на переднем сегменте или процедур на заднем сегменте или может поддерживать и те и другие. В любом случае хирургический инструментарий часто требует применения сопутствующих расходуемых материалов, например хирургических кассет, пакетов для текучей среды, трубок, наконечников ручного инструмента и других расходных материалов.
Хирургическая кассета может обеспечивать множество разных функций в зависимости от процедуры и хирургического инструментария. Например, хирургические кассеты для хирургии катаракты (например, процедур факоэмульсификации) помогают организовать оросительные и аспирационные потоки в операционное поле и из него. Хирургические кассеты могут также обеспечивать опору для пакетов для текучих сред, коллектор для направления вакуума/давления в хирургический инструментарий и другие функции.
Уровни текучих сред в инфузионной/оросительной камере и аспирационной камере хирургической кассеты измеряют для определения объема оставшейся текучей среды для процедуры и расходных характеристик текучей среды. Известные способы измерения уровня текучей среды в камере требуют окрашивания текучей среды или применения поплавка для обозначения границы раздела между текучей средой и воздухом. Однако добавление красителя в текучую среду нежелательно, так как он вводит дополнительные химикаты в текучую среду, поступающую в глаз. Применение поплавков нежелательно, так как поплавки могут застревать в камере и чувствительны к ориентации камеры. Поэтому существует потребность в способе и системе неинвазивного непрерывного измерения уровня, которая может ослабить или устранить проблемы, связанные с известными системами и способами измерения уровня.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления системы и способа для непрерывного неинвазивного измерения уровня согласно настоящему изобретению удовлетворяют данному и другим требованиям. Варианты осуществления настоящего изобретения обеспечивают устройство и способ для измерения уровня текучей среды в хирургической камере. Один вариант осуществления настоящего изобретения содержит хирургическую систему, содержащую хирургическую кассету, по меньшей мере, частично сформированную из материала кассеты, образующего камеру, и содержащую первую стенку и вторую стенку, и хирургическую стойку, содержащую кассетоприемник для вмещения хирургической кассеты. Хирургическая стойка может дополнительно содержать множество вертикально расположенных источников света для проецирования света на первую стенку хирургической кассеты, при этом каждый из множества источников света расположен для проецирования соответствующего светового луча вдоль соответствующего пути распространения, который характеризуется таким углом падения на поверхность камеры, что, по меньшей мере, большая часть соответствующего светового луча отражается, если граница раздела материала кассеты/первой текучей среды (например, ВОЗДУХА) пересекает соответствующий путь распространения, и большая часть соответствующего светового луча не отражается, если граница раздела материала кассеты/второй текучей среды (например, BSS (сбалансированный солевой раствор)) пересекает соответствующий путь распространения. Кроме того, хирургическая стойка может содержать матрицу датчиков, содержащую множество вертикально расположенных участков для приема света сквозь вторую стенку хирургической кассеты и формирования выходного сигнала, который указывает величину освещенности вертикально расположенных участков.
Другой вариант осуществления настоящего изобретения содержит систему, содержащую линейную матрицу источников света и линейную матрицу датчиков. Линейная матрица источников света может содержать первый источник света для проецирования первого пучка света на первую стенку кассеты вдоль первого пути распространения, при этом первый путь распространения характеризуется таким углом падения на поверхность камеры что, по меньшей мере, большая часть первого светового пучка преломляется, если граница раздела материала кассеты/первой текучей среды пересекает первый путь распространения; и второй источник света, расположенный по вертикальной оси относительно первого источника света, для проецирования второго пучка света на первую стенку кассеты вдоль второго пути распространения, при этом второй путь распространения характеризуется таким углом падения на поверхность камеры что, по меньшей мере, большая часть второго светового пучка, если не весь данный пучок, отражается, если граница раздела материала кассеты/второй текучей среды пересекает второй путь распространения. Линейная матрица датчиков может содержать первый участок, расположенный для приема первого пучка света, и второй участок, расположенный для приема второго пучка света, и формирования выходного сигнала для указания, освещается ли каждый из первого и второго участков.
Еще один вариант осуществления настоящего изобретения включает в себя способ определения уровня текучей среды в хирургической кассете, заключающийся в том, что излучают множество световых пучков на стенку хирургической кассеты по параллельным вертикально разнесенным путям распространения, регистрируют величину освещенности различных вертикально расположенных участков линейной матрицы датчиков, расположенной для приема множества световых пучков, и определяют уровень текучей среды по освещенности различных вертикально расположенных участков линейной матрицы датчиков.
Еще один вариант осуществления настоящего изобретения содержит систему, содержащую хирургическую кассету, по меньшей мере, частично сформированную из материала кассеты, образующего камеру, и содержащую первую стенку и вторую стенку. Система может дополнительно содержать хирургическую стойку, которая содержит кассетоприемник для вмещения хирургической кассеты, источник и датчик. Источник света может проецировать световой луч вдоль пути распространения на первую стенку хирургической кассеты. Источник света расположен так, что, по меньшей мере, большая часть светового луча отражается, если граница раздела материала кассеты/первой текучей среды пересекает путь распространения, и большая часть светового луча не отражается, если граница раздела материала кассеты/второй текучей среды пересекает путь распространения.
Датчик расположен для приема света сквозь вторую стенку хирургической кассеты и формирования выходного сигнала, который указывает освещенность датчика.
Другой вариант осуществления настоящего изобретения включает в себя способ определения присутствия текучей среды в хирургической кассете, который содержит этапы, заключающиеся в том, что излучают световой пучок на стенку хирургической кассеты под углом падения для создания условия, чтобы большая часть светового пучка отражалась на границе раздела материала кассеты/первой текучей среды и большая часть светового пучка не отражалась на границе раздела материала кассеты/второй текучей среды, и используют выходной сигнал датчика для определения присутствия или отсутствия жидкости на конкретном уровне в камере кассеты. В зависимости от конфигурации кассеты свет может отражаться, например, на границе раздела материала кассеты/жидкости, но не на границе раздела материала кассеты/воздуха.
Варианты осуществления настоящего изобретения обеспечивают преимущество, так как источник света и линейная матрица датчиков не контактируют непосредственно с хирургической текучей средой. Кроме того, не требуется поплавкового устройства внутри камеры или окрашивания текучей среды.
Варианты осуществления настоящего изобретения обеспечивают еще одно преимущество посредством обеспечения высокоразрешающего непрерывного измерения уровня.
Варианты осуществления настоящего изобретения обеспечивают еще одно преимущество посредством обеспечения высокочувствительных определений расхода.
Варианты осуществления настоящего изобретения обеспечивают еще одно преимущество посредством определения уровня по переходу между элементами разрешения матрицы датчиков, определяемыми в состоянии включения («ON»), и элементами разрешения, определяемыми в состоянии выключения («OFF»). Данные варианты осуществления не чувствительны к чувствительности линейной матрицы датчиков.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Более полное понимание настоящего изобретения и его преимуществ дает нижеследующее описание, связанное с прилагаемыми чертежами, на которых одинаковые позиции указывают одинаковые детали и на которых:
фиг.1 - схематическое представление одного варианта осуществления хирургической стойки;
фиг.2 - схематическое представление одного варианта осуществления хирургической кассеты;
фиг.3 - схематическое представление одного варианта осуществления кассетоприемника;
фиг.4 - схематическое представление на виде сверху одного варианта осуществления камеры с линейным источником света и матрицей датчиков;
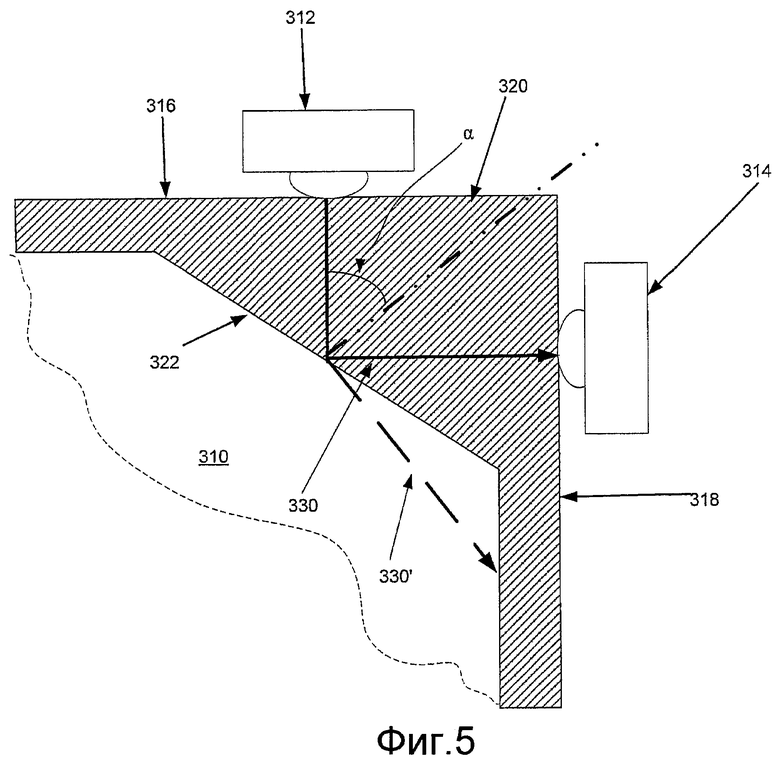
фиг.5 - схематическое представление на виде сверху другого варианта осуществления камеры с линейным источником света и матрицей датчиков;
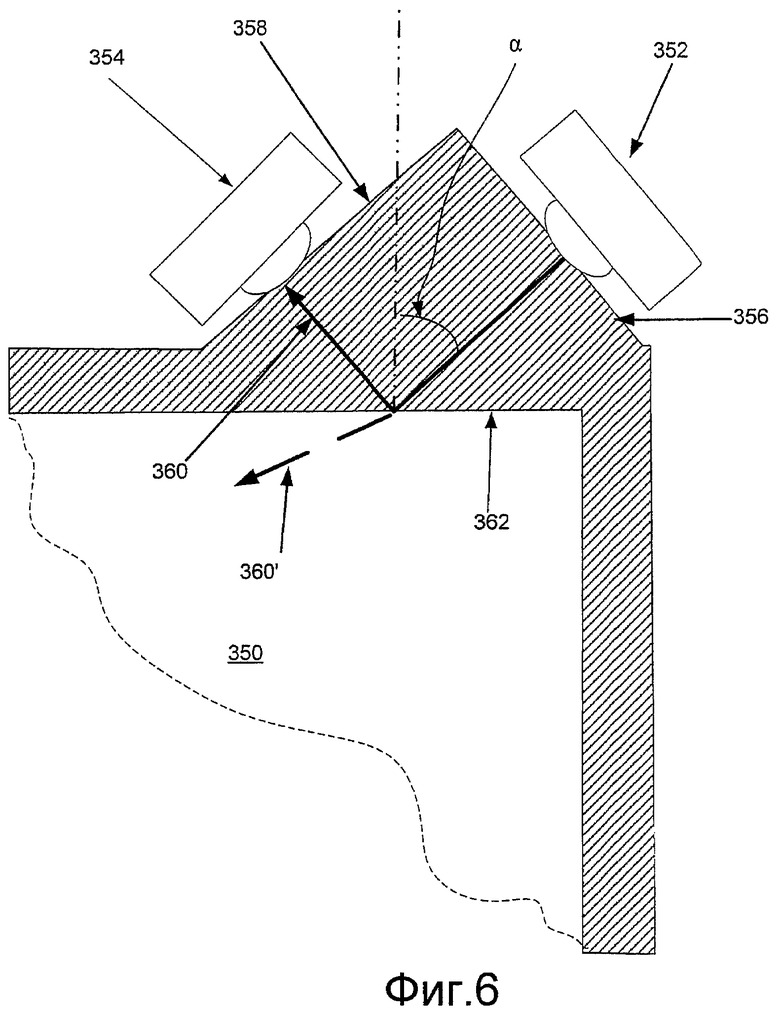
фиг.6 - схематическое представление на виде сверху еще одного варианта осуществления камеры с линейным источником света и матрицей датчиков;
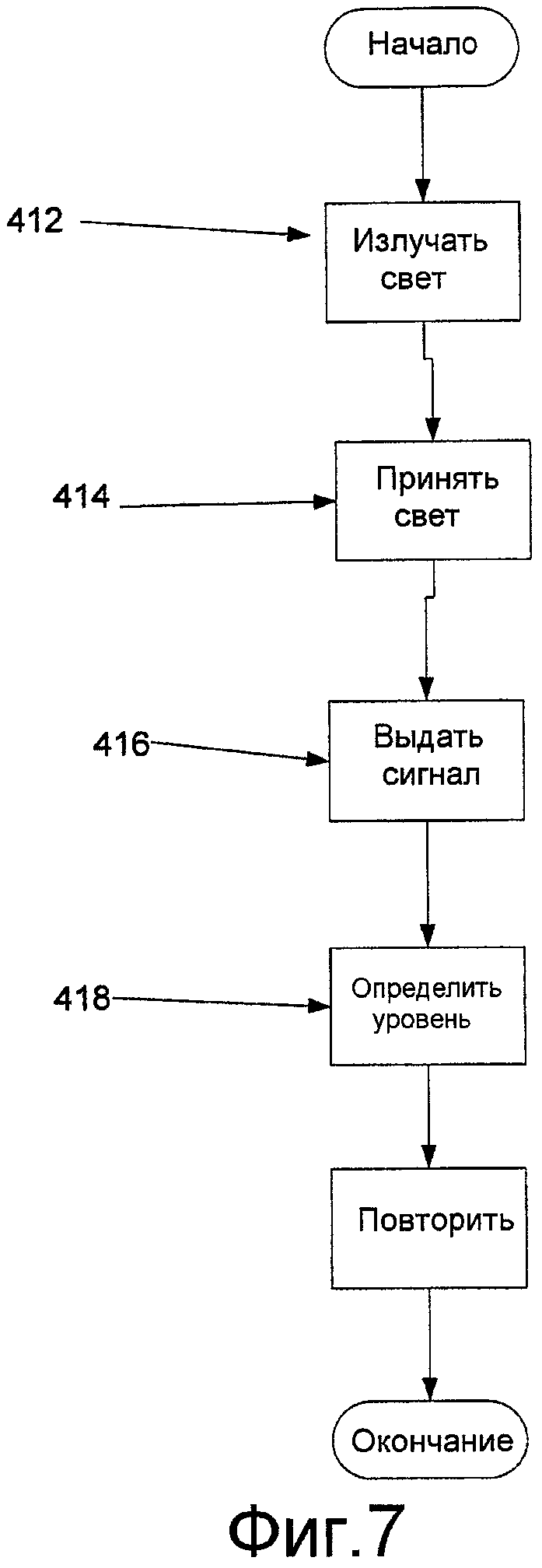
фиг.7 - блок-схема последовательности операций, поясняющая один вариант осуществления способа измерения уровня; и
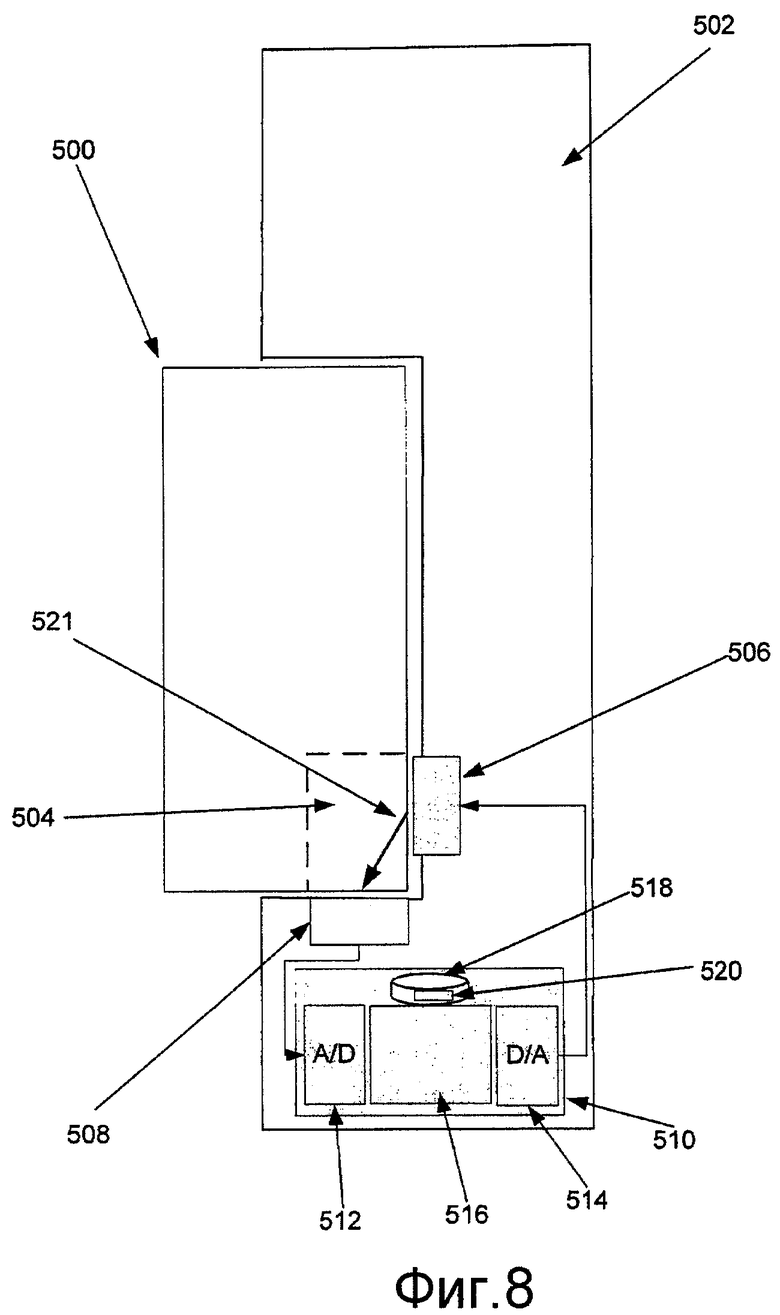
фиг.8 - схематическое представление хирургической кассеты и стойки, использующей датчик уровня текучей среды согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
Предпочтительные варианты осуществления изобретения показаны на фигурах, при этом одинаковые позиции применяются для ссылки на одинаковые и соответствующие части различных чертежей.
Варианты осуществления настоящего изобретения обеспечивают систему и способ для определения уровня текучей среды в хирургической кассете посредством проецирования света от линейного источника света на стенку кассеты. В зависимости от количества света, отраженного или преломленного в кассете (например, вследствие границы раздела материала кассеты/жидкости или границы раздела материала кассеты/воздуха), различные участки линейной матрицы датчиков будут освещены больше или меньше. Посредством исследования освещенности линейной матрицы датчиков можно определить уровень текучей среды в камере.
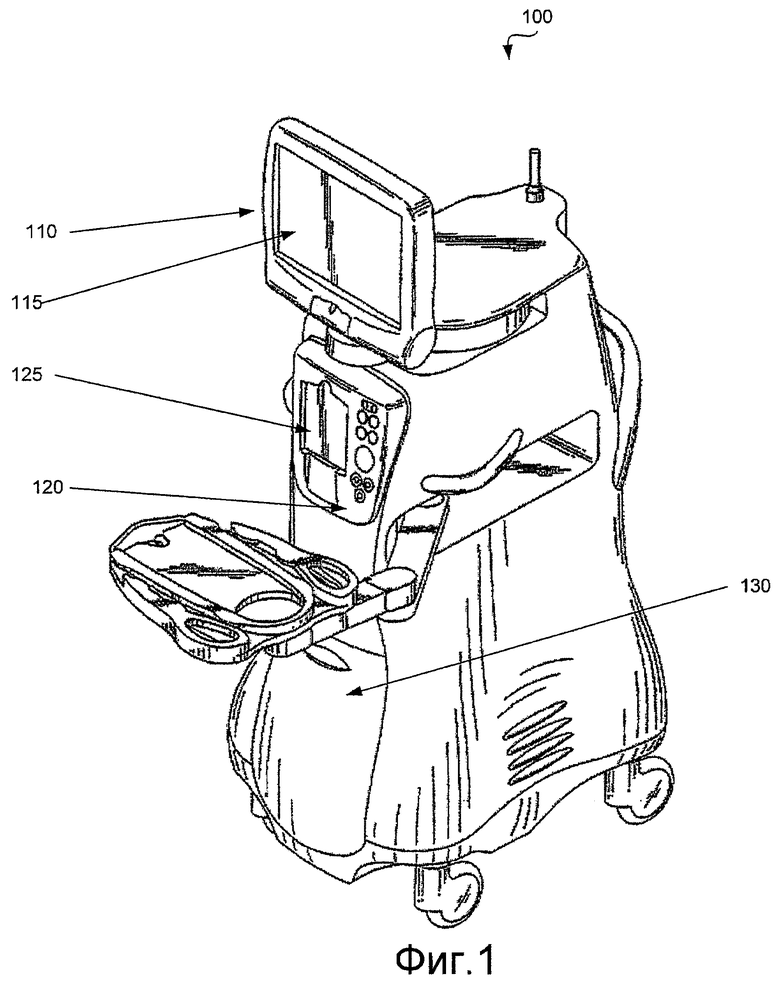
Фиг.1 дает схематическое представление одного варианта осуществления офтальмологической хирургической стойки 100. Хирургическая стойка 100 может содержать поворотный монитор 110, который содержит сенсорный экран 115. Поворотный монитор 110 можно устанавливать с разной ориентацией для любого, кто нуждается в наблюдении сенсорного экрана 115. Поворотный монитор 110 можно поворачивать на шарнире из стороны в сторону, а также вращать и наклонять. Сенсорный экран 115 обеспечивает графический пользовательский интерфейс («GUI»), который позволяет пользователю взаимодействовать со стойкой 100.
Хирургическая стойка 100 содержит также соединительную панель 120, используемую для подсоединения различных инструментов и расходных материалов к хирургической стойке 100. Соединительная панель 120 может содержать, например, соединитель для коагуляции, соединители для различных ручных инструментов и кассетоприемник 125. Хирургическая стойка 100 может содержать также множество удобных для пользователя возможностей, например ножную педаль управления (например, находящуюся за панелью 130), и другие возможности.
Во время работы кассету (не показана) можно помещать в кассетоприемник 125. Зажим в хирургической стойке 100 зажимает кассету в заданном месте для сведения к минимуму перемещения кассеты во время использования. Зажим может зажимать верх и низ кассеты, боковые стороны кассеты или иначе зажимать кассету.
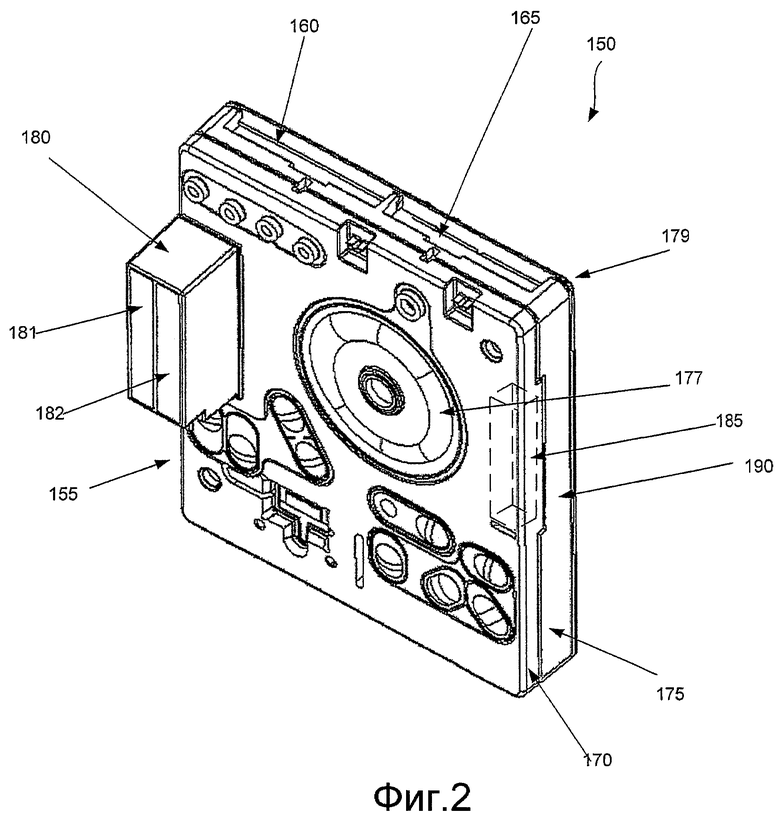
Фиг.2 дает схематическое представление одного варианта осуществления хирургической кассеты 150. Кассета 150 может обеспечивать устройство с замкнутой циркуляцией текучей среды, которое можно выбрасывать после хирургической процедуры. Кассета 150 может содержать корпус 155 кассеты и участки, которые сопрягаются с зажимом (например, указанные, в общем, в зонах 160 и 165 зажима), выступающие из корпуса 155 кассеты. Кассета 150 может быть сформирована из акрилонитрилбутадиенстиролового (ABS) пластика или другого подходящего материала. В представленном варианте осуществления кассета 150 сформирована из трех основных секций: внутренней секции 170 или предназначенной для сопряжения с хирургической стойкой, которая обращена к хирургической стойке, когда кассета 150 вставлена в хирургическую стойку 100, средней секции 175 и покрывной пластины 179. Различные секции кассеты 150 могут соединяться посредством прессовой посадки, взаимно сцепляющихся лапок, химического соединения, термического соединения, механических крепежных элементов или другого устройства крепления, известного в технике. В других вариантах осуществления кассета 150 может быть сформирована цельной или составной.
Секция 170 сопряжения с хирургической стойкой может быть обращенной к стойке во время использования и обеспечивать сопряжение для каналов потока текучей среды (например, проточного канала 177 для шлангового насоса, обеспечиваемого эластомерной диафрагмой насоса), клапанов (например, инфузионных/аспирационных клапанов) и других возможностей для организации потока текучей среды. Кассета 150 может также соединяться с пакетом для текучей среды (не показанным) для сбора текучей среды во время процедуры.
Хирургическая кассета 150 в соответствии с различными вариантами осуществления настоящего изобретения содержит камеры для вмещения текучей среды для аспирации и инфузии. Например, камерный картридж 180 может содержать две инфузионные камеры 181/182. Третья камера 185 может быть внутри кассеты 150 на стороне кассеты 150, противоположной от камерного картриджа 180 (например, на стороне кассеты 150, обозначенной позицией 190). В соответствии с одним вариантом осуществления, уровень текучей среды в камерах можно определять неинвазивно. Как описано ниже, свет можно проецировать на стенки камер с использованием вертикального источника света. В зависимости от отражения или преломления света на камере вертикальная матрица датчиков будет или не будет регистрировать свет в различных точках по вертикальной оси матрицы. На основании перехода между освещенными и неосвещенными участками матрицы датчиков можно регистрировать уровень текучей среды в камере.
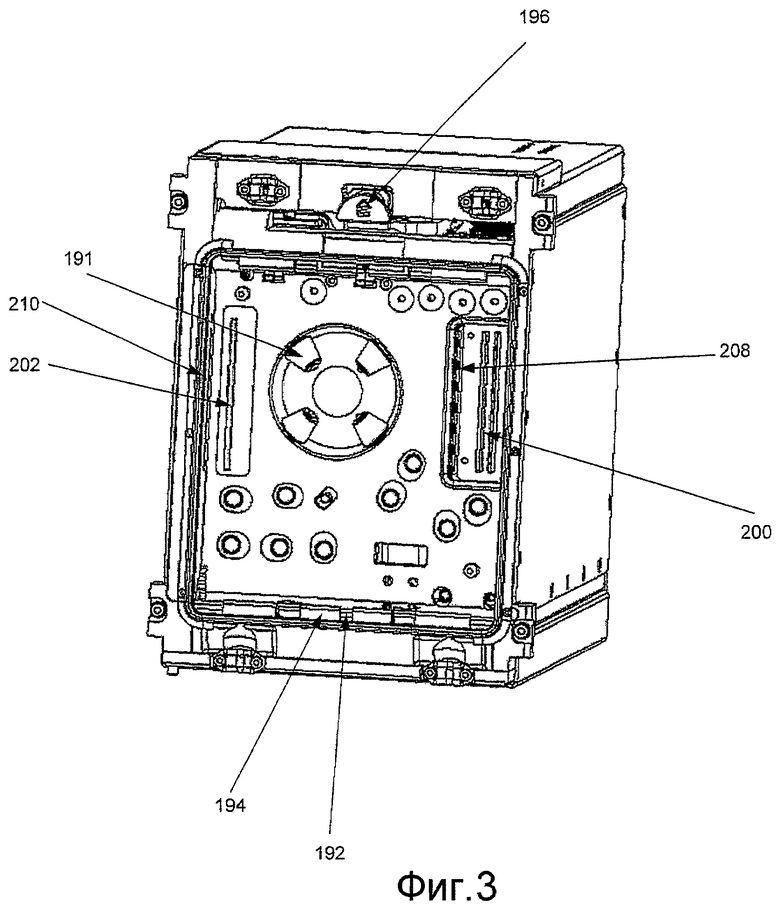
Фиг.3 дает схематическое представление одного варианта осуществления кассетоприемника 125 без кассеты. Кассетоприемник 125 может содержать различные впускные и выпускные патрубки для сжатого воздуха/газа, для стыковки с хирургической кассетой. Кассетоприемник 125 может дополнительно содержать отверстие, чтобы ролики 191 шлангового насоса могли контактировать с хирургической кассетой во время работы. Один вариант осуществления шлангового насоса и взаимодействующей кассеты описан в заявке на патент США № 6293926, выданной Соренсену (Sorensen), которая полностью включена в настоящее описание путем отсылки.
Хирургическая кассета в варианте осуществления, показанном на фиг.3, фиксируется в заданном месте зажимом, содержащим нижнюю направляющую 192 и верхнюю направляющую (не показана). Каждая направляющая может содержать внешние зажимные пальцы (например, зажимной палец 194), который контактируют с кассетой в соответствующих зонах зажима, и внутренние зажимные пальцы, чтобы устанавливать кассету во время вставки и выталкивать кассету из кассетоприемника во время расцепления. Чтобы инициировать отцепление кассеты из зажима, нажимают кнопку 196 расцепления. Кассетоприемник 125 может содержать линейные источники света для проецирования света на стенки камер кассеты и матрицы датчиков для регистрации света, преломленного сквозь камеру (или отраженного от стенки камеры). Каждый линейный источник света может содержать множество источников света, вертикально размещенных (т.е. для проецирования света вдоль вертикально разнесенных путей распространения) и расположенных для проецирования на стенку кассеты. Например, линейный источник 200 света может проецировать свет в камеры 181/182. Линейный источник 200 света может содержать первый набор источников света, отъюстированных для проецирования света в камеру 181, и второй набор источников света, расположенных под углом 90° (или другим углом) к первому набору источников света, для проецирования света в камеру 182. Аналогично, линейный источник 202 света может проецировать свет на стенки камеры 185. Соответствующие линейные матрицы датчиков могут принимать свет, преломленный сквозь камеру или отраженный от поверхности камеры. В настоящем примере матрица 206 датчиков (показана на фиг.4) может принимать свет от источника 200 света, спроецированный на камеру 181, матрица датчиков, расположенная в стенке 208, может принимать свет от источника 200 света, спроецированный на камеру 182, и матрица датчиков в стенке 210 может принимать свет от источника 202 света. Каждая матрица датчиков может содержать вертикально расположенные участки для приема света сквозь стенку камеры кассеты. Вертикально расположенные участки могут быть, например, элементами разложения, отдельными датчиками или другими устройствами для измерения освещенности.
Конфигурация на фиг.3 представлена для примера. Конструктивные характеристики кассетоприемника 125, расположение и число впускных/выпускных патрубков и других возможностей кассетоприемника 125 могут зависеть от хирургической стойки 100, выполняемой хирургической процедуры или других факторов.
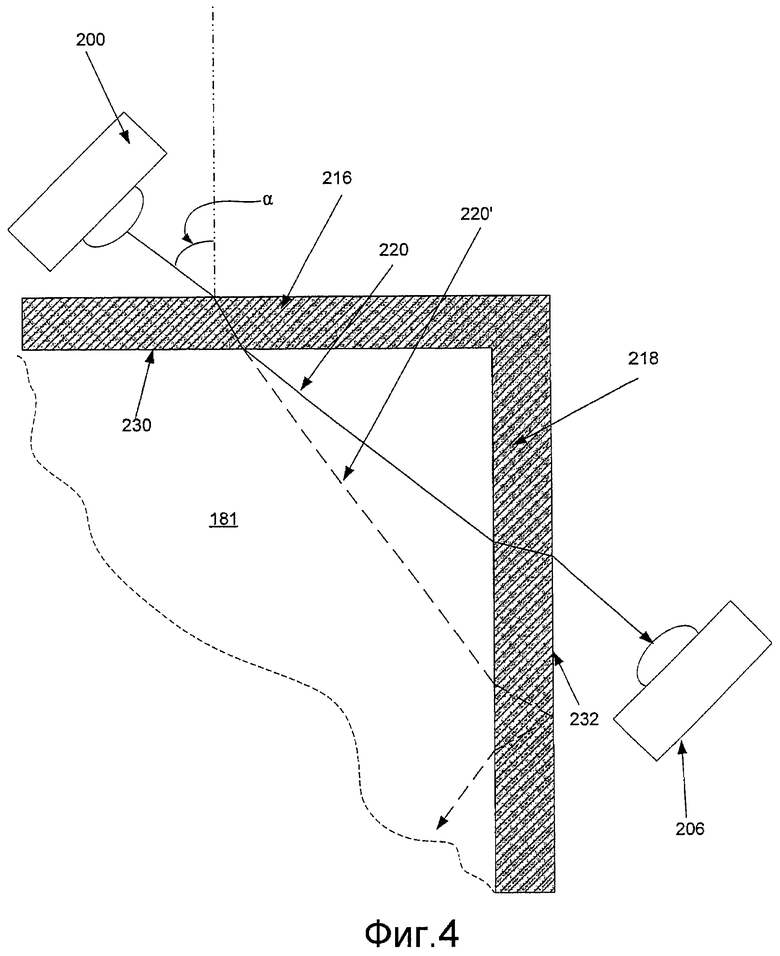
Фиг.4 дает схематическое представление на виде сверху одного варианта осуществления камеры 181 с линейным источником 200 света и датчиком 206. Стенки 216/218 камеры 181, которые обращены к источнику 200 света и датчику 206, в соответствии с одним вариантом осуществления являются прозрачными или непрозрачными. В соответствии с одним вариантом осуществления настоящего изобретения, источник 200 света может представлять собой линейный источник света (т.е. непрерывный источник света), например линейный светодиодный (LED) источник света, который выдает свет в разных вертикальных точках, и датчик 206 может представлять собой линейную матрицу датчиков (т.е. непрерывную матрицу датчиков), например линейный фотодиод, который регистрирует свет, излучаемый источником 200 света в разных местах по вертикали. Одним из примеров линейной матрицы 206 датчиков является линейная матрица датчиков TAOS TSL208R компании Texas Advanced Optoelectronic Systems, Piano, шт. Техас, которая имеет разрешение 200 точек на дюйм (DPI). Линейный источник 200 света и линейная матрица 206 датчиков подсоединены к схеме (не показана). В соответствии с одним вариантом осуществления, линейный источник света может также содержать источники света для проецирования света в другую камеру (например, камеру 182, показанную на фиг.2). В предпочтительном варианте, свет, производимый источником 200 света, обеспечивает равномерные параллельные световые пучки, которые характеризуются, в основном, горизонтальным путем распространения.
Во время работы линейный источник 200 света выполняет функцию излучателя для излучения света, тогда как датчик 206 выполняет функцию приемника. Угол падения света на стенку 216 камеры можно выбрать таким, чтобы световые лучи освещали датчик 206 при прохождении сквозь воздух в камере, но обеспечивали менее чем пороговое количество света при прохождении сквозь текучую среду BSS в камере. Для примера, на фиг.4 показано поведение светового луча 220, проходящего сквозь воздух в камере 181 и 220', проходящего сквозь текучую среду BSS в камере 181. В первом случае световой пучок 220 проходит сквозь стенку 216, проходит сквозь воздух в верхней части камеры 181, через стенку 218 камеры и освещает участки линейной матрицы 206 датчиков. С другой стороны, световой пучок 220' преломляется на поверхности 230, когда входит в текучую среду BSS (например, на границе раздела пластика ABS/текучей среды BSS). Преломленный световой пучок 220' затем отражается на поверхности 232, когда он достигает соседней стенки 218 и тем самым не попадает на элементы разложения матрицы 206 датчиков. При соответствующем угле α, отражение на поверхности 232 может оказываться полным внутренним отражением, так как показатель преломления материала кассеты (например, пластика ABS, акрилового или другого пластика) больше, чем показатель преломления воздуха. В данном случае свет полностью отражается, что не допускает достижения световым пучком участков линейной матрицы 206 датчиков, совмещенных с текучей средой BSS в камере. Поэтому элементы разложения, совмещенные с текучей средой BSS, будут затененными. Следовательно, большая часть света не отражается, когда путь распространения пересекается границей раздела пластика ABS/воздуха, но большая часть пучка (если не весь пучок) отражается, когда путь распространения пересекается границей раздела пластика ABS/текучей среды BSS.
Электронная схема может сравнивать выходные сигналы от разных участков линейной матрицы 206 датчиков (например, элементов разложения или других чувствительных элементов) с порогом для определения, является ли данный участок линейной матрицы 206 датчиков включенным (соответствующим воздуху) или выключенным (соответствующим жидкости). Переход между включенным участком и выключенными участками линейной матрицы 206 датчиков указывает уровень текучей среды. Следует отметить, однако, что можно применить другие механизмы распознавания краев, например линейную интерполяцию.
Соответствующий угол α падения света определяют по показателю преломления первой текучей среды (например, воздуха или другой текучей среды) и второй текучей среды (например, текучей среды BSS или другой текучей среды) и материалу кассеты (например, пластику ABS или другому материалу). В предпочтительном варианте, α выбирают так, чтобы световой пучок мог проходить сквозь первую текучую среду для достижения матрицы 206 датчиков, но полностью отражался, когда проходит сквозь вторую текучую среду. В других вариантах осуществления, в которых световой пучок не претерпевает полное внутреннее отражение, можно устанавливать заданный порог для компенсации количества света, которое достигает матрицы 206 датчиков сквозь вторую текучую среду. Заданный порог можно также регулировать для компенсации внешних источников света, света, попадающего от других источников, и других факторов, которые могут приводить к выдаче участком матрицы 206 датчиков сигнала в выключенном состоянии.
Фиг.5 дает схематическое представление другого варианта осуществления камеры 310 с источником света 312 и датчиком 314. Стенки 316/318 камеры 310, которые обращены к источнику 312 света и датчику 314, в соответствии с одним вариантом осуществления, являются прозрачными или непрозрачными. В соответствии с одним вариантом осуществления настоящего изобретения, источник 312 света может представлять собой линейный источник света (т.е. непрерывный источник света), например линейный светодиодный (LED) источник света, который выдает свет вдоль вертикальной оси, и датчик 314 может представлять собой линейную матрицу датчиков (т.е. непрерывную матрицу датчиков), например линейный фотодиод, который регистрирует свет, излучаемый источником 312 света вдоль вертикальной оси. Линейный источник 312 света и линейная матрица 314 датчиков подсоединены к схеме (не показана).
Линейный источник 312 света установлен на одной боковой стороне камеры и освещает камеру 310 перпендикулярно стенке 316. Линейная матрица 314 датчиков установлена вертикально на соседней боковой стенке 318 камеры. Камера 310 имеет призматический угол 320 в месте пересечения стенок 316 и 318. Угол α падения можно подобрать так, чтобы световой пучок от источника 312 света полностью отражался от поверхности 322 для попадания на линейную матрицу 314 датчиков, когда световой пучок падает на поверхность 322 в точке, где с другой стороны присутствует первая текучая среда (показатель преломления пластика ABS приблизительно равен 1,5, а показатель преломления ВОЗДУХА приблизительно равен 1,0). Но большая часть световых пучков преломляется на поверхности 322 для прохождения мимо линейной матрицы 314 датчиков, когда световой пучок падает на поверхность 322 в точке, где с другой стороны присутствует вторая текучая среда (показатель преломления пластика ABS приблизительно равен 1,5, а показатель преломления текучей среды BSS приблизительно равен 1,3). Другими словами, большая часть или весь свет отражается на поверхности 322, когда путь распространения света пересекается границей раздела материала кассеты/первой текучей среды, но только небольшая часть световых пучков отражается, если путь распространения пересекается границей раздела материала кассеты/второй текучей среды.
Для примера, на фиг.5 показано поведение светового луча 330, в основном, отражающегося на границе раздела воздуха/пластика на поверхности 322 камеры 310, и светового луча 330', в основном, преломляющегося в камеру 310 на поверхности 322. В первом случае световой пучок 330 проходит сквозь стенку 316, проходит сквозь пластик в углу 320 и отражается на поверхности 322, являющейся границей раздела пластика/воздуха. С другой стороны, большая часть светового пучка 330' преломляется на поверхности 322, являющейся границей раздела материала кассеты/текучей среды BSS, хотя некоторая часть светового пучка 330' может также отражаться. В данном примере интенсивно отражаемый пучок (например, пучок 330) освещает линейную матрицу 314 датчиков, указывая на присутствие воздуха на данном уровне.
Фиг.6 представляет еще один вариант осуществления измерения уровня в отраженном пучке. Фиг.6 дает схематическое представление еще одного варианта осуществления камеры 350 с источником света 352 и датчиком 354. Стенки 356/358 кассеты, которые обращены к источнику 352 света и датчику 354, в соответствии с одним вариантом осуществления, являются прозрачными или непрозрачными. В соответствии с одним вариантом осуществления настоящего изобретения, источник 352 света может представлять собой линейный источник света (т.е. непрерывный источник света), например линейный светодиодный (LED) источник света, который выдает свет вдоль вертикальной оси, и датчик 354 может представлять собой линейную матрицу датчиков (т.е. непрерывную матрицу датчиков), например линейный фотодиод, который регистрирует свет, излучаемый источником 352 света вдоль вертикальной оси. Линейный источник 352 света и линейная матрица 354 датчиков подсоединены к схеме (не показана).
Линейный источник 352 света установлен на стенке 356. Линейная матрица 354 датчиков установлена вертикально на стенке 358. Угол α падения можно подобрать так, чтобы световой пучок от источника 352 света полностью отражался от поверхности 362 для попадания на линейную матрицу 354 датчиков, когда световой пучок падает на поверхность 362 в точке, где с другой стороны присутствует первая текучая среда, но преломлялся на поверхности 362 для прохождения мимо линейной матрицы 354 датчиков, когда световой пучок падает на поверхность 362 в точке, где с другой стороны присутствует вторая текучая среда, благодаря тому, что пластик ABS имеет показатель преломления около 1,5, текучая среда BSS имеет показатель преломления около 1,3, и воздух имеет показатель преломления около 1,0.
Если вернуться к примеру кассеты из пластика ABS, содержащей камеру 350 с воздухом и текучей средой BSS, то поскольку верх камеры будет содержать воздух, верхний участок поверхности 362 будет являться границей раздела пластика ABS/воздуха, тогда как нижний участок поверхности 362 будет являться границей раздела пластика ABS/текучей среды BSS. Следовательно, на поверхности 362 присутствуют две разные оптические границы раздела. Световые пучки от линейного источника света 352 приходят к поверхности 362 под углом α падения. Часть пучка может отражаться на поверхности 362 и приниматься линейной матрицей 354 датчиков, тогда как часть может преломляться в камеру 350.
Для примера, на фиг.6 показано поведение светового луча 360, в основном, отражающегося на границе раздела воздуха/пластика на поверхности 362 камеры 340, и светового луча 360', в основном, преломляющегося в камеру 350 на поверхности 362. В первом случае световой пучок 360 проходит сквозь стенку 356, проходит сквозь пластик и отражается на поверхности 362, являющейся границей раздела пластика/воздуха. С другой стороны, световой пучок 360' преломляется на поверхности 362.
Фиг.7 представляет блок-схему последовательности операций, поясняющую один вариант осуществления способа определения уровня текучей среды в камере. Множество источников света (например, LED или других источников света) проецирует свет на стенку камеры (этап 412) вдоль путей распространения. Если путь распространения светового луча пересекается границей раздела материала кассеты/первой текучей среды, то большая часть, если не полностью, светового луча может отражаться, тогда как, если путь распространения пересекается границей раздела материала кассеты/второй текучей среды, то большая часть светового луча не отражается. При использовании примера на фиг.4, если световой луч пересекается границей раздела пластика ABS/текучей среды BSS (например, по поверхности 230), то большая часть, если не полностью, светового луча отражается на поверхности 232. С другой стороны, при использовании примера на фиг.5 и 6, если световой луч пересекается границей раздела пластика ABS/воздуха, то большая часть, если не полностью, светового луча отражается.
Линейная матрица датчиков принимает некоторую часть света, проецируемого источниками света (этап 414), и вырабатывает сигнал, указывающий на количество света, принятого на разных участках матрицы датчиков (например, на разных элементах разложения матрицы) (этап 416). На этапе 418 выходной сигнал линейной матрицы датчиков обрабатывают по схеме распознавания краев для определения, которые участки линейной матрицы датчиков освещены достаточно для указания на присутствие/отсутствие текучей среды на соответствующем уровне в камере. В соответствии с одним вариантом осуществления, выходные сигналы разных участков линейного датчика сравнивают с порогом для определения, находится ли данный участок линейного датчика в первом состоянии (например, соответствующем воздуху) или во втором состоянии (например, соответствующем текучей среде). Переход между участками в первом и втором состояниях линейной матрицы датчиков отмечает уровень текучей среды. Однако следует отметить, что можно применить другие механизмы распознавания краев, например линейную интерполяцию.
Этапы, показанные на фиг.7, можно повторять при необходимости или желании, и уровневая информация корректируется непрерывно (например, после каждого цикла процессора, цикла команд программы или другого периода времени). Изменения в уровневой информации могут отражать расход текучей среды из камеры. В частности, расход пропорционален A*dL/dt, где A означает площадь сечения камеры, и dL/dt означает изменение уровня в зависимости от времени. Поскольку требуется использовать только один угол камеры, площадь сечения камеры A в камере можно свести к минимуму. Следовательно, можно повысить чувствительность определения расхода. Уменьшение сечения может также ослабить эффекты разбрызгивания текучей среды в камере, обусловленные толчками кассеты.
Фиг.8 дает схематическое представление на виде сверху хирургической кассеты и стойки, использующей датчик уровня текучей среды в соответствии с одним вариантом осуществления настоящего изобретения. Кассета 500 установлена в стойку 502. Камера 504 является частью кассеты 500. Линейный источник 506 света и линейная матрица 508 датчиков являются частью стойки. Источник 506 света проецирует световой пучок 521 на стенку кассеты 500 под соответствующим углом падения. Линейная матрица 508 датчиков расположена для приема светового пучка от источника света. Как источник света, так и линейная матрица датчиков присоединены к контроллеру 510.
Контроллер 510 может представлять собой любой подходящий известный в технике контроллер, включая контроллеры на базе DSP (цифрового процессора сигналов), ASIC (специализированной интегральной схемы), RISK-процессора или CPU (центрального процессора). Контроллер 510 может содержать аналого-цифровой (A/D) преобразователь 512 для преобразования аналоговых сигналов от линейной матрицы 508 датчиков в цифровые сигналы. Кроме того, контроллер 510 может содержать цифроаналоговый (D/A) преобразователь 614 для преобразования цифровых управляющих сигналов в аналоговые сигналы для управления интенсивностью света в источнике 506 света. Процессор 516, например DSP, ASIC, RISK, микроконтроллер или CPU, или другой подходящий процессор может обращаться к набору команд 520 и компьютерно-читаемой памяти 518. Компьютерно-читаемая память может представлять собой RAM (оперативную память), ROM (постоянную память), магнитное запоминающее устройство, оптическое запоминающее устройство или другую подходящую память и может быть встроенной в процессор 516 или выбираемой им. Процессор 516 может исполнять команды 520 для обработки цифровых входных сигналов для определения уровня текучей среды в камере, как описано выше. Контроллер 510 может дополнительно обмениваться данными с другими компонентами стойки 502, что обеспечивает дополнительные функциональные возможности. В других вариантах осуществления настоящего изобретения можно применять любой подходящий контроллер для определения уровня текучей среды в камере.
Выше настоящее изобретение описано на примере конкретных вариантов осуществления, но следует понимать, что варианты осуществления представлены только для иллюстрации, что объем изобретения не ограничен данными вариантами осуществления. В вышеописанные варианты осуществления можно вносить изменения, модификации, дополнения и усовершенствования. Предполагается, что такие изменения, модификации, дополнения и усовершенствования не выходят за пределы объема изобретения, определяемого нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЧАСТИЦ-МЕТОК | 2007 |
|
RU2487338C2 |
| ВЕРХНИЙ И НИЖНИЙ ЗАЖИМ ХИРУРГИЧЕСКОЙ КАССЕТЫ | 2007 |
|
RU2434649C2 |
| СПЕКТРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ АНАЛИЗА ТЕКУЧЕЙ СРЕДЫ | 2008 |
|
RU2473058C2 |
| НОСИТЕЛЬ ДЛЯ ОПТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ В МАЛЫХ ОБЪЕМАХ ОБРАЗЦА | 2009 |
|
RU2502985C2 |
| УСТРОЙСТВО МИКРОЭЛЕКТРОННОГО ДАТЧИКА | 2008 |
|
RU2494374C2 |
| ПОСЛЕДОВАТЕЛЬНЫЙ ДАТЧИК ВОЛНОВОГО ФРОНТА С БОЛЬШИМ ДИОПТРИЙНЫМ ДИАПАЗОНОМ, ПРЕДОСТАВЛЯЮЩИЙ ИНФОРМАЦИЮ В РЕАЛЬНОМ ВРЕМЕНИ | 2012 |
|
RU2573179C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЪЕДИНЕНИЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ КАТАРАКТЫ С ХИРУРГИЧЕСКИМ ЛЕЧЕНИЕМ ГЛАУКОМЫ ИЛИ АСТИГМАТИЗМА | 2011 |
|
RU2580749C2 |
| ОФТАЛЬМОЛОГИЧЕСКИЙ ДАТЧИК ВОЛНОВОГО ФРОНТА, ДЕЙСТВУЮЩИЙ В РЕЖИМЕ ПАРАЛЛЕЛЬНОГО ОТБОРА И СИНХРОННОГО ДЕТЕКТИРОВАНИЯ | 2013 |
|
RU2600854C2 |
| СПОСОБ И СИСТЕМЫ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В КОГЕРЕНТНОМ ИЗЛУЧЕНИИ И УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ МОДИФИКАЦИИ МАТЕРИАЛОВ | 2018 |
|
RU2760694C2 |
| Эллипсометр | 2016 |
|
RU2638092C1 |
Группа изобретений относится к медицине и медицинской технике, а именно к системе и способу определения уровня текучей среды в хирургической кассете посредством проецирования света от линейного источника света на стенку кассеты. Система содержит линейную матрицу источников света, включающую первый источник света и второй источник света, расположенный по вертикальной оси относительно первого источника света. Первый источник света проецирует первый пучок света на первую стенку кассеты вдоль первого пути распространения. При этом первый путь распространения характеризуется таким углом падения на поверхность первой стенки кассеты, что, по меньшей мере, большая часть первого светового пучка преломляется, если граница раздела материала кассеты/первой текучей среды пересекает первый путь распространения; и проходит через вторую стенку кассеты. Второй источник света проецирует второй пучок света на первую стенку кассеты вдоль второго пути распространения. При этом второй путь распространения характеризуется таким углом падения на поверхность первой стенки кассеты, что, по меньшей мере, большая часть второго светового пучка внутренне отражается на второй стенке кассеты, если граница раздела материала кассеты/второй текучей среды пересекает второй путь распространения. Система также включает линейную матрицу датчиков, содержащую первый участок, расположенный для приема первого пучка света, и второй участок, расположенный для приема второго пучка света, и формирования выходного сигнала для указания, освещается ли каждый из первого и второго участков. С помощью данной системы осуществляют способ, который заключается в том, что излучают множество световых пучков на стенку хирургической кассеты по параллельным вертикально разнесенным путям распространения, регистрируют величину освещенности различных вертикально расположенных участков линейной матрицы датчиков соответствующих датчиков, расположенных для приема множества световых пучков, и определяют уровень текучей среды по освещенности различных вертикально расположенных участков линейной матрицы датчиков. Использование группы изобретений позволит расширить арсенал технических средств для неинвазивного непрерывного измерения уровня текучей среды. 2 н. и 8 з.п. ф-лы, 8 ил.
1. Система для определения уровня текучей среды в хирургической кассете, содержащая:
линейную матрицу источников света, содержащую:
первый источник света для проецирования первого пучка света на первую стенку кассеты вдоль первого пути распространения, при этом первый путь распространения характеризуется таким углом падения на поверхность первой стенки кассеты что, по меньшей мере, большая часть первого светового пучка преломляется, если граница раздела материала кассеты/первой текучей среды пересекает первый путь распространения; и проходит через вторую стенку кассеты; и
второй источник света, расположенный по вертикальной оси относительно первого источника света, для проецирования второго пучка света на первую стенку кассеты вдоль второго пути распространения, при этом второй путь распространения характеризуется таким углом падения на поверхность первой стенки кассеты что, по меньшей мере, большая часть второго светового пучка внутренне отражается на второй стенке кассеты, если граница раздела материала кассеты/второй текучей среды пересекает второй путь распространения; и
линейную матрицу датчиков, содержащую первый участок, расположенный для приема первого пучка света, и второй участок, расположенный для приема второго пучка света, и формирования выходного сигнала для указания, освещается ли каждый из первого и второго участков.
2. Система по п.1, в которой линейная матрица датчиков расположена для приема света сквозь камеру.
3. Система по п.1, в которой матрица датчиков расположена для приема света, отраженного от границы раздела материала кассеты/первой текучей среды.
4. Система по п.1, в которой граница раздела материала кассеты/первой текучей среды является границей раздела материала кассеты/воздуха.
5. Система по п.1, в которой граница раздела материала кассеты/второй текучей среды является границей раздела материала кассеты/жидкости.
6. Система по п.1, дополнительно содержащая контроллер, функционально предназначенный для определения уровня текучей среды по выходному сигналу линейной матрицы датчиков.
7. Система по п.6, в которой контроллер дополнительно функционально предназначен для:
пороговой обработки выходного сигнала матрицы датчиков для определения, что первый участок линейной матрицы датчиков находится во включенном состоянии, и определения, что второй участок линейной матрицы датчиков находится в выключенном состоянии; и
определения уровня текучей среды по переходу между включенным и выключенным состояниями первого и второго участков.
8. Система по п.7, в которой контроллер дополнительно функционально предназначен для определения расхода по изменению уровня текучей среды в зависимости от времени.
9. Способ определения уровня текучей среды в хирургической кассете, заключающийся в том, что:
излучают множество световых пучков на стенку хирургической кассеты по параллельным вертикально разнесенным путям распространения;
обеспечивают угол наклона по меньшей мере большей части световых пучков на поверхности раздела материала кассеты/первой текучей среды на поверхности первой стенки таким образом, что пучки падают на вторую стенку под углом, который вызывает полное внутреннее отражение на второй стенке;
преломляют большую часть световых пучков на поверхности раздела материала кассеты/второй текучей среды на поверхности первой стенки таким образом, что пучки падают на вторую стенку под углом, который обеспечивает преломление и прохождение пучков через вторую стенку кассеты для попадания на соответствующие датчики;
регистрируют величину освещенности различных вертикально расположенных участков линейной матрицы датчиков соответствующих датчиков, расположенных для приема множества световых пучков;
определяют уровень текучей среды по освещенности различных вертикально расположенных участков линейной матрицы датчиков.
10. Способ по п.9, дополнительно содержащий этап, заключающийся в том, что:
подвергают пороговой обработке выходной сигнал матрицы датчиков для определения, какие участки матрицы датчиков определяются как находящиеся в первом состоянии и какие участки определяются как находящиеся во втором состоянии; и
определяют уровень текучей среды по переходу между участками, определенными как находящиеся в первом состоянии, и участками, определенными как находящиеся во втором состоянии.
| US 5747824 A, 05.05.1998 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6084519 A, 04.07.2000 | |||
| US 5877417 A, 02.03.1999 | |||
| WO 9920983 A2, 29.04.1999 | |||
| RU 2000023 C1, 15.02.1993. | |||

