Область техники
Настоящее изобретение относится к системам слежения и локации. В частности, это изобретение относится к системе слежения и локации, способной, прежде всего, отслеживать подповерхностные перемещения.
Предшествующий уровень техники
Разработка с блоковым обрушением представляет собой способ подземной разработки твердых полезных ископаемых, который привлекает к себе все большее внимание, хотя и использовался ранее в течение ряда лет. Вместе с тем, одним из факторов, препятствующих распространению технологии разработки с блоковым обрушением, является сложность определения того, что происходит в массиве горных пород в процессе разработки. Согласно некоторым теориям, массивы горных пород подвержены естественному дроблению, хотя по-прежнему мало что можно утверждать о динамике горных пород с какой-либо степенью уверенности.
Точное понимание фактических механизмов течения рудного тела в процессе разработки было бы полезным, чтобы сделать современную практику и теорию разработки с блоковым обрушением максимально эффективными и полными и иметь возможность совершенствовать используемые технологические приемы. Определение параметров обрушения горной породы имеет первостепенную важность для размещения выпускных воронок и точного управления выпуском руды. В частности, динамика рудного тела важна для определения количества точек выпуска, необходимых для разработки, для точного ежедневного определения местоположения фронта обрушения, для того чтобы иметь возможность менять приемы отбойки, используя внутреннюю энергию рудного тела для усиления дробления, и для обеспечения безопасности шахтеров на основе знаний о местоположении и поведении фронта обрушения. Сбор информации о течении горной породы затруднен в связи с тем, что обрушение, после того как оно началось, ведет себя внутри массива горных пород совершенно независимо. Можно пытаться воздействовать на режим выпуска только грубой корректировкой, например выпуском через воронки, однако результаты при этом обычно значительно запаздывают, и их корреляцию с производимыми изменениями оценить сложно.
Известен ряд попыток установить, что происходит внутри массива горных пород в процессе разработки. Как правило, эти попытки сводились либо к использованию маркеров, либо к компьютерному моделированию.
Так, в массив горных пород вводились маркеры, которые должны были помочь установить характеристики течения породы. Обычно маркеры, изготовленные из стали, внедрялись в массив горных пород над рудным телом. Как только начинается дробление рудного тела, эти маркеры начинают перемещаться через массив горных пород к выпускным воронкам, расположенным ниже. Затем маркеры собирают и сортируют с учетом соотношения места введения и места выхода. При этом предполагается, что траектория перемещения представляет собой прямую, соединяющую эти две точки, и именно по этой прямой и направлено течение массива горных пород. Хотя с помощью этой методики были достигнуты некоторые успехи, количество и степень истинности допущений, на которые она опирается, и отсутствие данных в случае потери маркеров накладывают ограничения на ее эффективность.
Использовались также компьютерные программные средства для моделирования течения горной породы, и сейчас для этих целей существует несколько различных программных систем моделирования. В некоторых из них горная порода представлена в виде сферы, тогда как в других используются формы, более похожие на действительную форму породы.
Результаты компьютерного моделирования показывают, что сферические модели хуже отражают свойства моделируемого объекта, чем модели с более реалистичной формой. Однако и те, и другие не основываются на достаточном количестве эмпирических данных и имеют ограниченное применение.
Для массивов горных пород, как и для любых других текучих массивов, отсутствуют данные полномасштабных измерений, которые могли бы служить необходимой исходной информацией о динамике движения массива в режиме реального времени. Во многих случаях, например в горной промышленности, это связано большей частью с физическими ограничениями на внедрение систем активных локационных датчиков в рудное тело. В частности, конструкция датчиков должна обеспечить им сохранность внутри рудного тела, несмотря на высокое давление и воздействия течения. Система локационных датчиков должна быть достаточно устойчивой к воздействиям, чтобы ее можно было установить в рудном теле с достаточной точностью, сводя к минимуму всевозможные исходные допущения. Такие датчики должны иметь систему энергообеспечения, способную работать внутри массива горных пород в течение длительных периодов. Используемая система передачи сигналов должна быть способна обеспечивать передачу и прием сигналов датчиков сквозь значительную толщину горной породы переменной плотности. Кроме того, требуется наличие интерфейса, который обеспечит анализ данных в режиме реального времени и позволит техническому и обслуживающему персоналу в подповерхностном пространстве получать информацию о фронте обрушения.
Более отчетливое понимание характеристик течения рудного тела благоприятно сказалось бы на ряде аспектов процесса разработки полезных ископаемых. В частности, эта информация была бы полезна при разработке средств динамического управления разработкой, используемых для управления горнодобывающим оборудованием. Локационная система, способная функционировать внутри массива горных пород, позволит также создать систему спасения шахтеров, оказавшихся в завалах, работающую на основе данных, получаемых от системы подземной локации или СПЛ (UPS). Система СПЛ (UPS) позволит отслеживать перемещения каждого шахтера, так что в случае аварии местоположение шахтеров можно будет определить точно, что позволит повысить эффективность спасательных операций. Кроме того, появятся возможности создания систем контроля за оборудованием в пределах шахты, которые повысят эффективность операций горных разработок.
Краткое описание чертежей
Прилагаемые чертежи иллюстрируют только предпочтительные реализации изобретения.
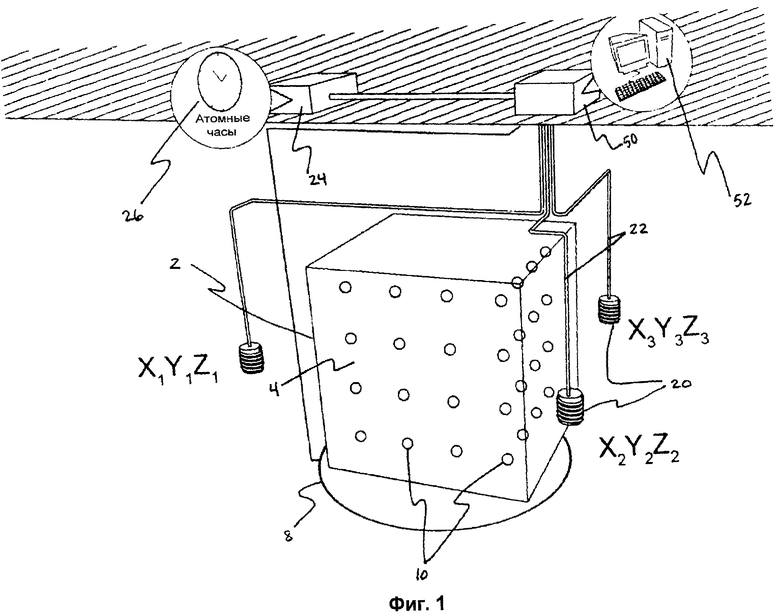
На Фиг.1 схематически изображена базовая система подповерхностной локации согласно изобретению, в которой используются сигналы на радиочастотах, со средней проходимостью через среду.
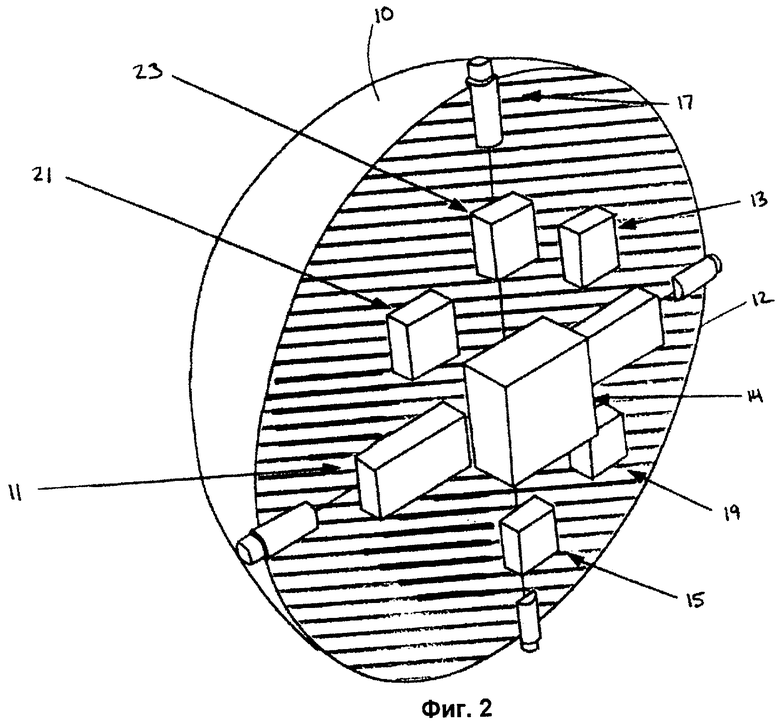
На Фиг.2 схематически изображен элемент системы СПЛ (UPS), который может использоваться в системе, представленной на Фиг.1.
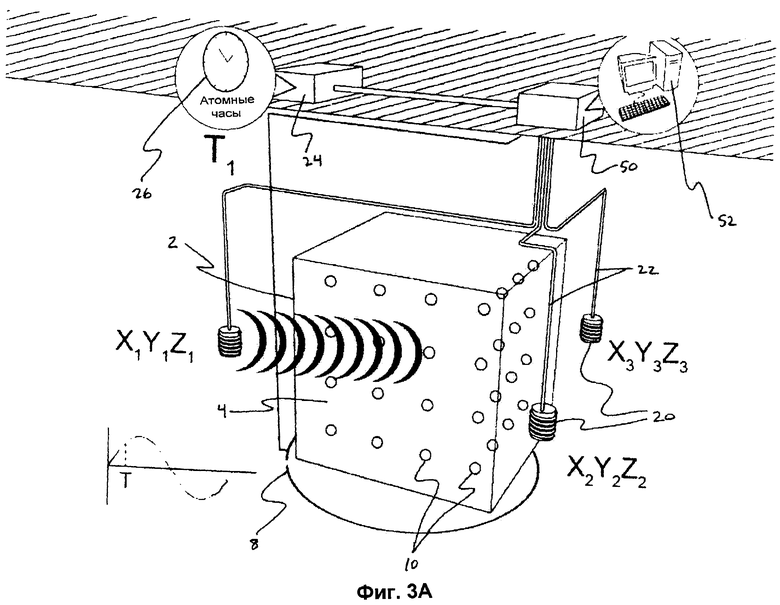
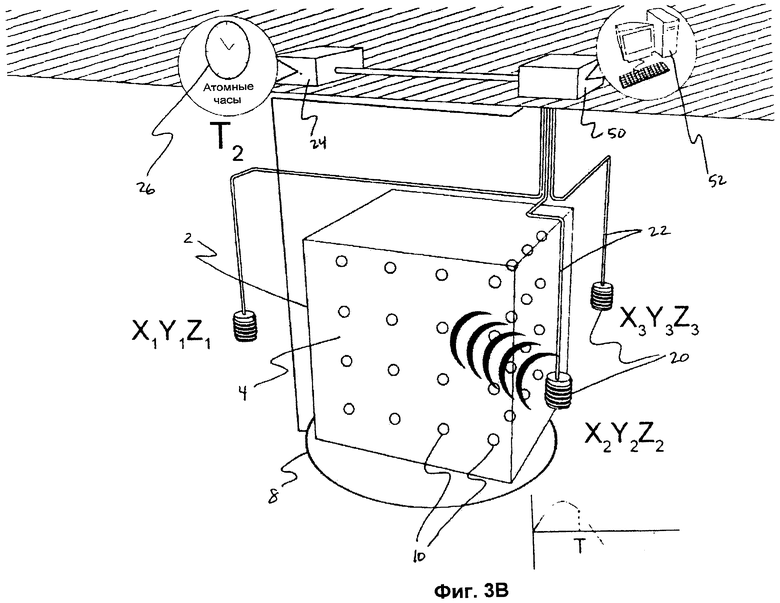
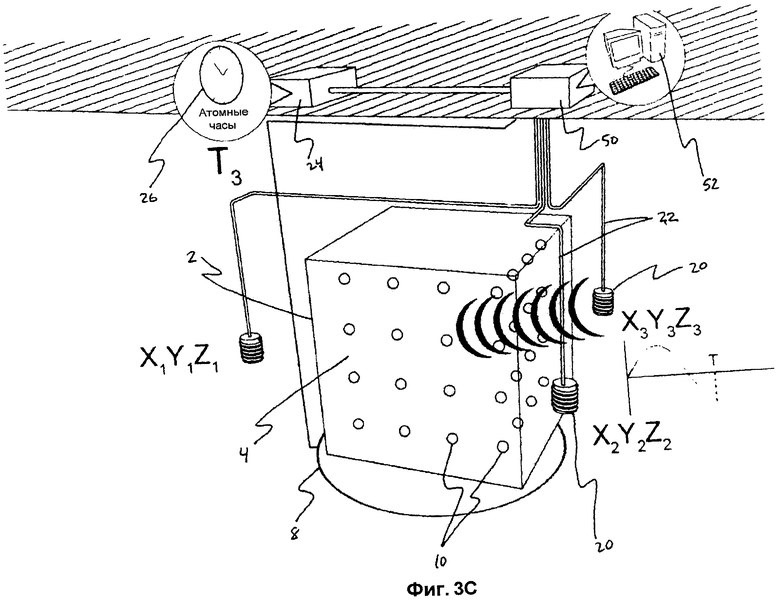
На Фиг.3А-3С схематически изображен процесс передачи сигналов от радиочастотных антенн, находящихся в различных положениях, к элементам системы СПЛ (UPS), представленной на Фиг.1.
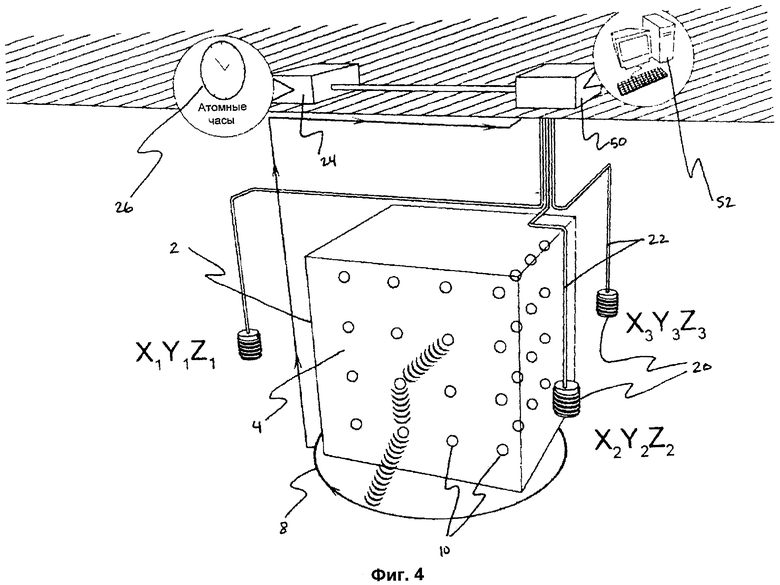
На Фиг.4 схематически изображен процесс ретрансляции сигналов от элементов СПЛ (UPS) к базовой радиочастотной антенне в системе подземной локации, представленной на Фиг.1.
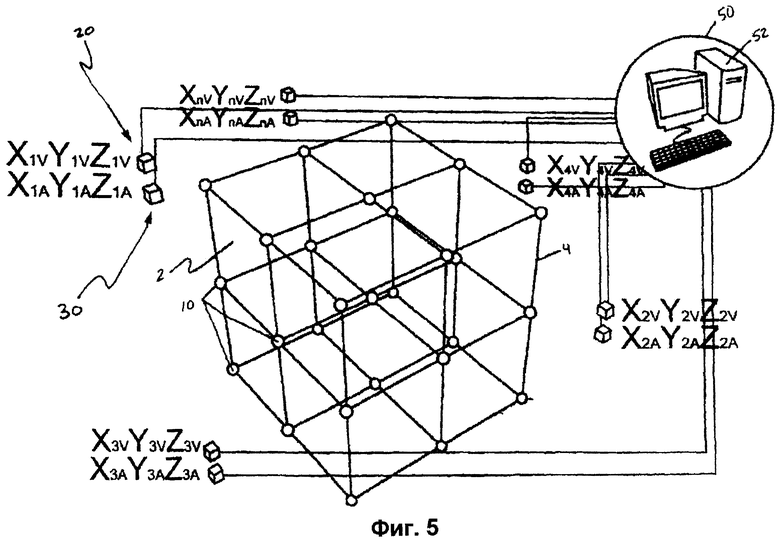
На Фиг.5 схематически изображена базовая система подземной локации согласно изобретению, в которой используется комбинация сигналов на радиочастотах, способных проходить через среду, и акустических сигналов.
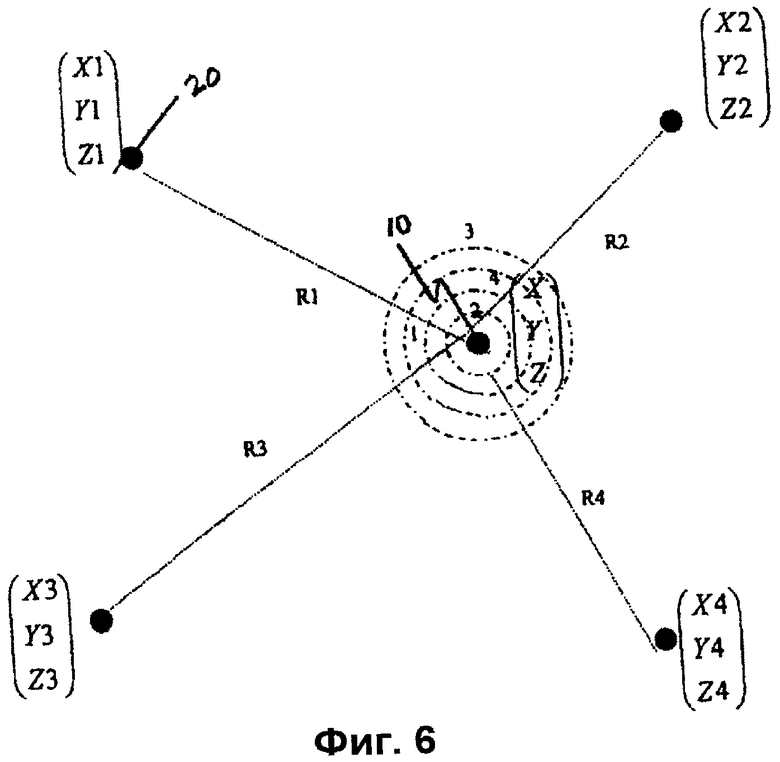
На Фиг.6 схематически изображена система триангуляции, в которой для определения времени прохождения сигнала используется вероятностная функция.
На Фиг.7 схематически изображен элемент СПЛ (UPS), который может использоваться в системе, представленной на Фиг.5.
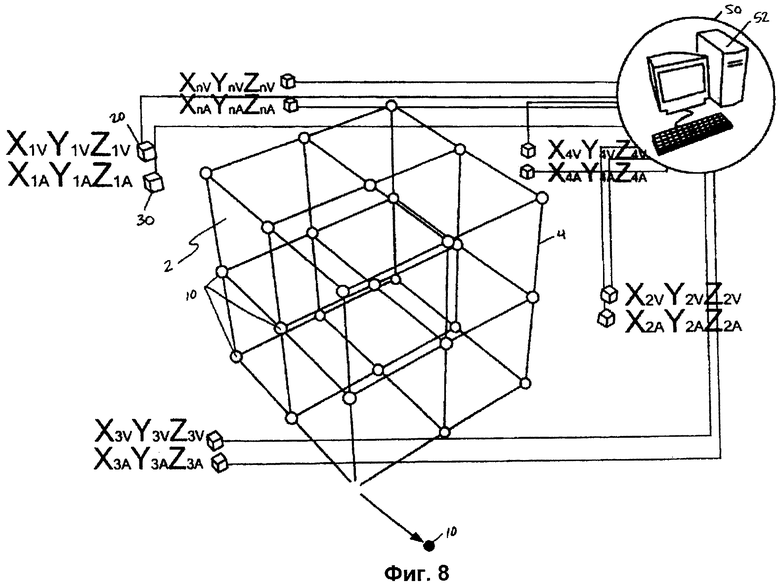
На Фиг.8 схематически изображено начальное перемещение элемента СПЛ (UPS) в системе подземной локации, представленной на Фиг.5.
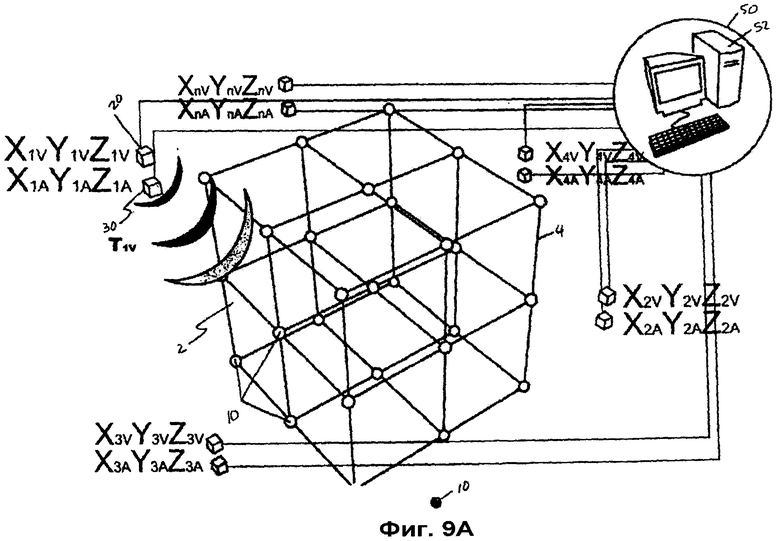
На Фиг.9А-9Е схематически изображен процесс передачи сигналов от радиочастотных антенн, находящихся в различных положениях, к элементам системы СПЛ (UPS), представленной на Фиг.5.
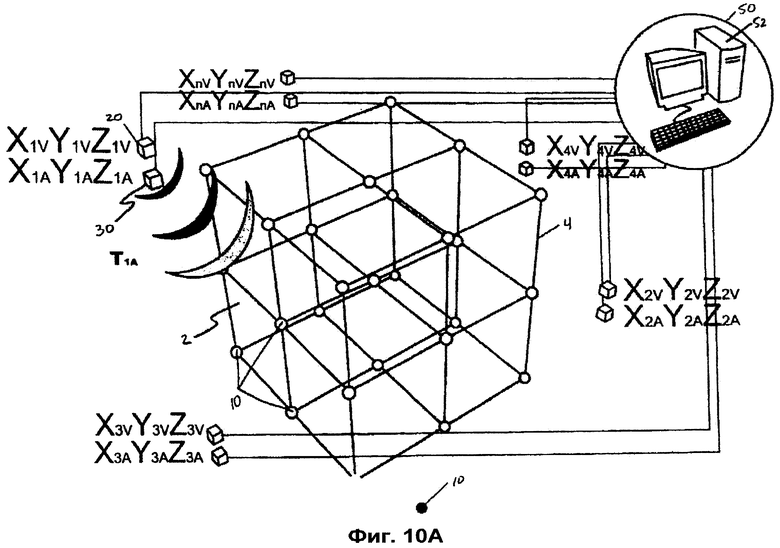
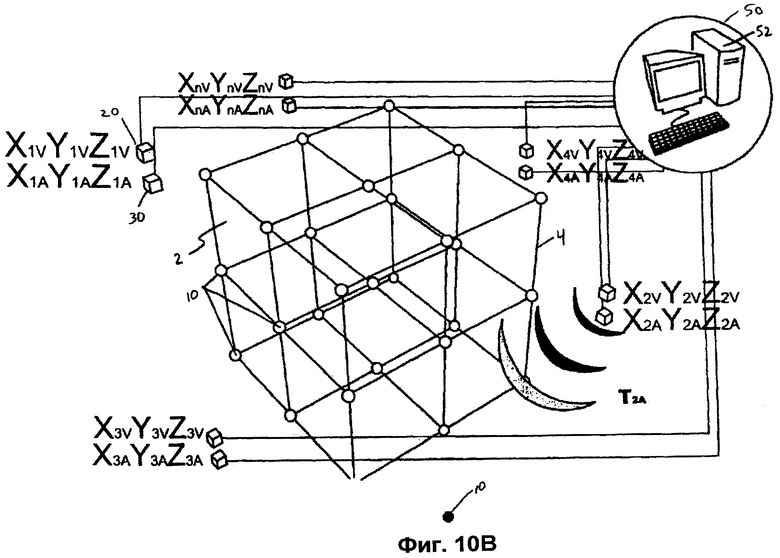
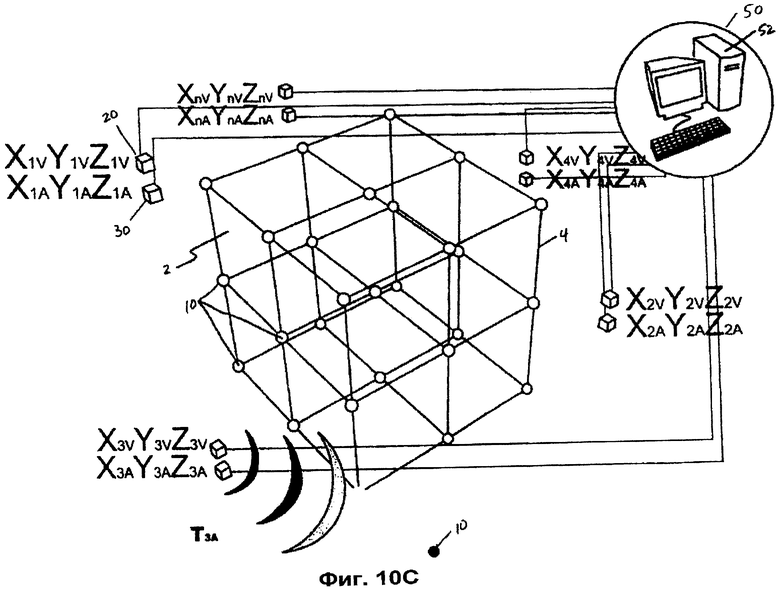
На Фиг.10А-10С схематически изображен процесс передачи сигналов от акустических генераторов, находящихся в различных положениях, к элементам системы СПЛ (UPS), представленной на Фиг.5.
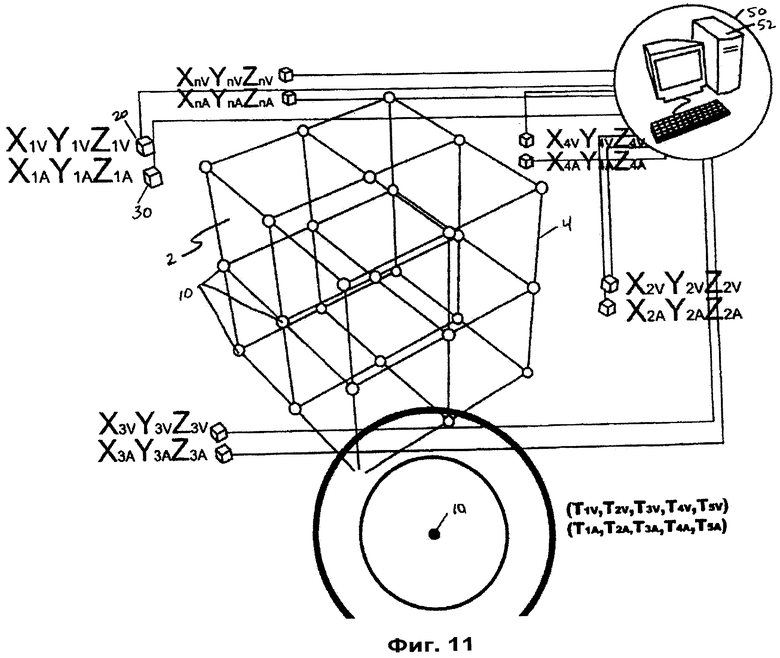
На Фиг.11 схематически изображен процесс передачи сигналов от элементов СПЛ (UPS) к радиочастотно-акустическим антеннам в системе подземной локации, представленной на Фиг.5.
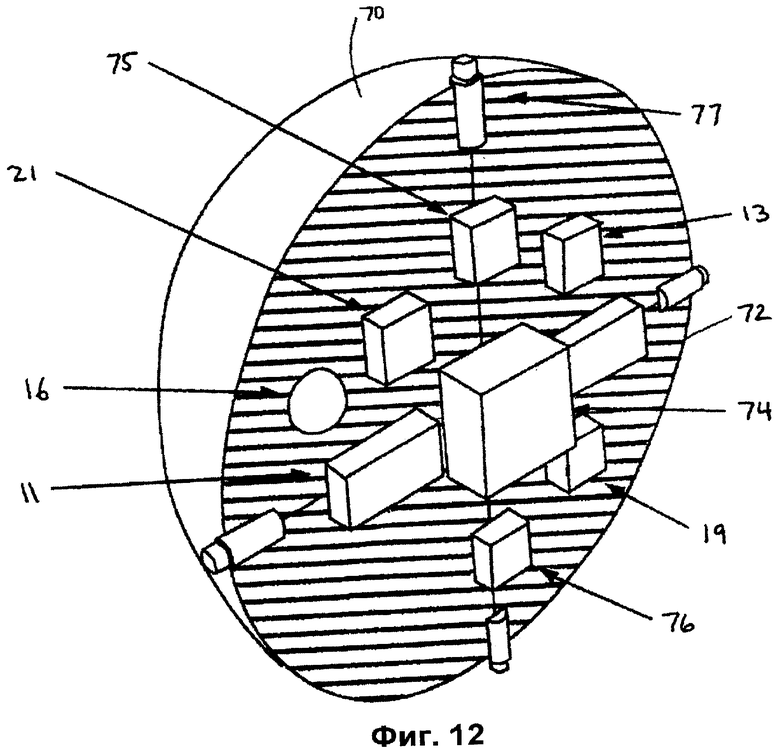
На Фиг.12 схематически изображена еще одна реализация элемента СПЛ (UPS), не включающая атомных часов.
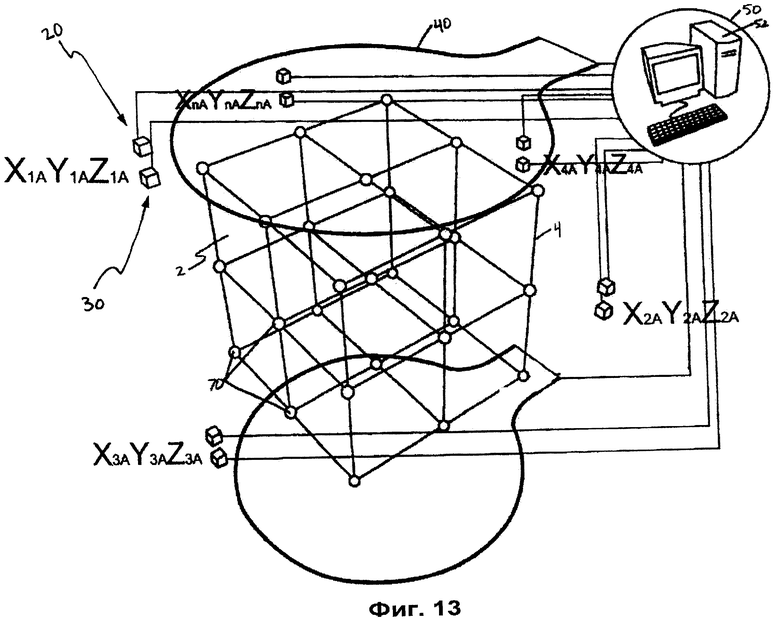
На Фиг.13 схематически изображена еще одна реализация системы СПЛ (UPS), с вариантом реализации антенн, работающих с радиочастотными сигналами, которые способны проходить через среду.
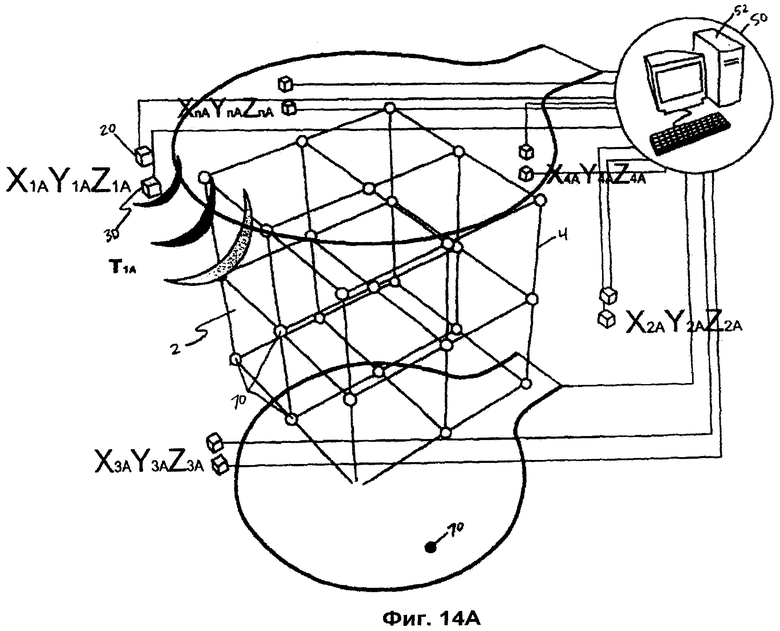
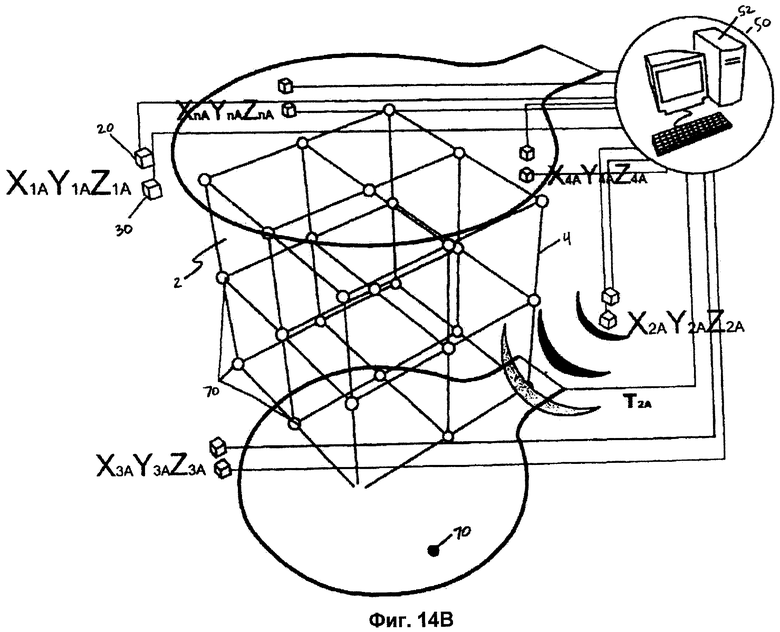
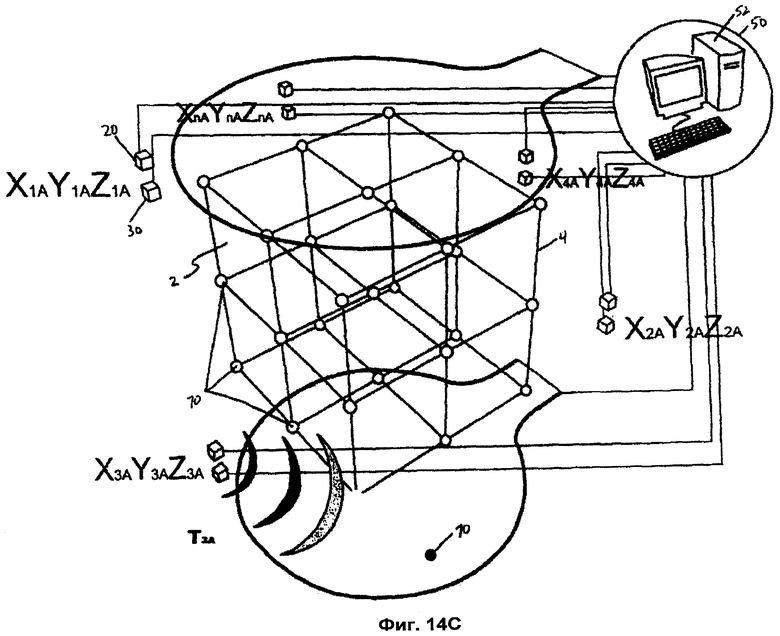
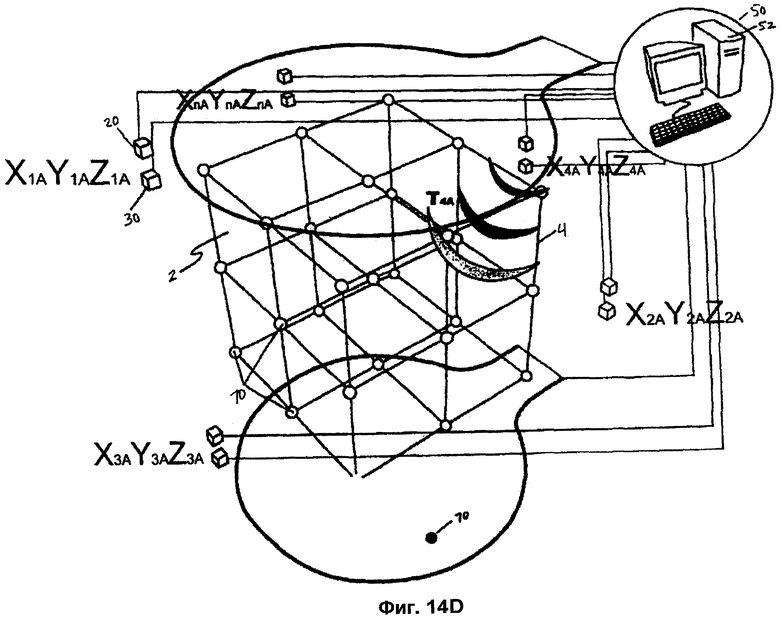
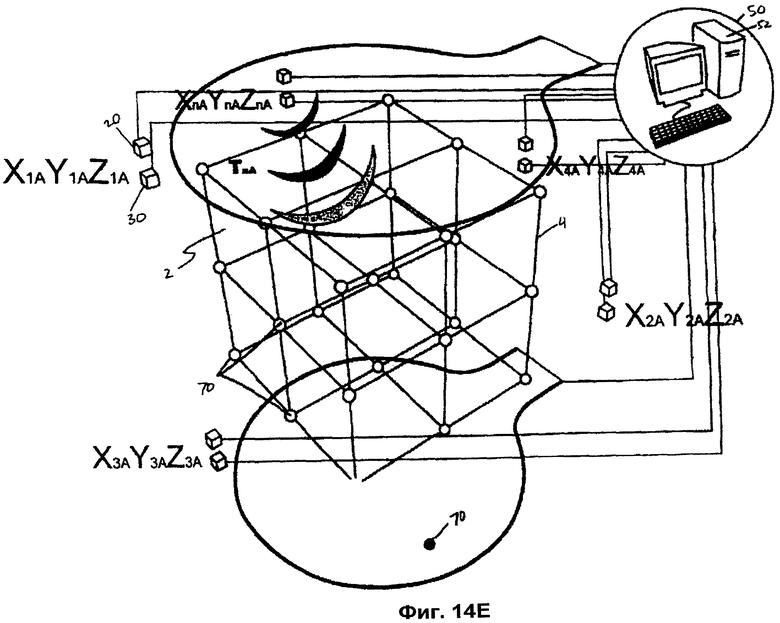
На Фиг.14А-14Е схематически изображен процесс передачи сигналов от акустических генераторов, находящихся в различных положениях, к элементам системы СПЛ (UPS), представленной на Фиг.13.
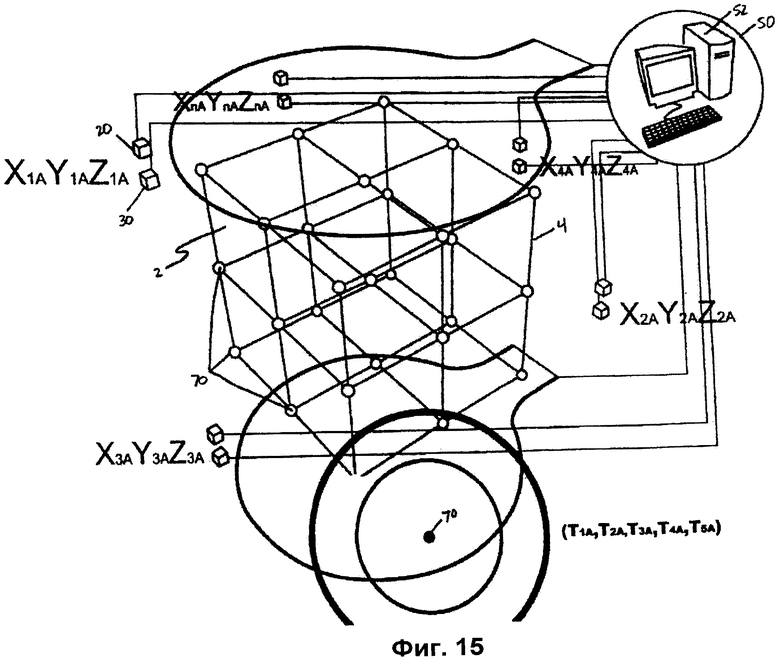
На Фиг.15 схематически изображен процесс передачи сигналов от элементов СПЛ (UPS) к антеннам, работающим с радиочастотными сигналами, способными проходить через среду, в системе подземной локации, представленной на Фиг.13.
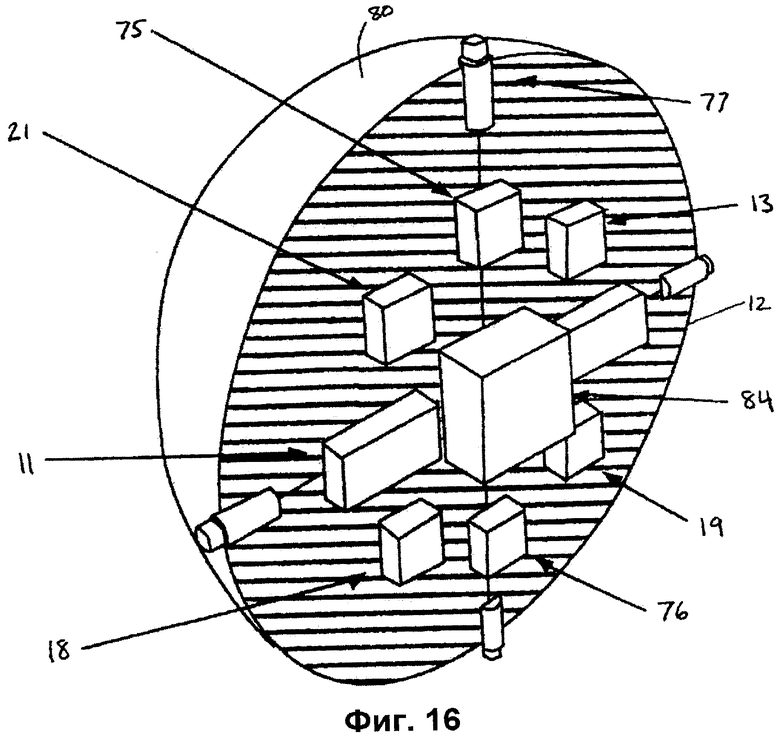
На Фиг.16 схематически изображена еще одна реализация элемента СПЛ (UPS), не включающая микрофона.
Подробное описание изобретения
Настоящее изобретение предусматривает систему подземной локации СПЛ (UPS), одна из предпочтительных реализаций которой представлена на Фиг.1, и способ, который может быть легко адаптирован практически к любой подповерхностной среде и любому текучему массиву, но особенно подходит для применения при горных разработках с блоковым обрушением. Система и способ согласно изобретению описываются применительно к ситуации разработки с блоковым обрушением, однако они применимы и к другим условиям, и в этом отношении описание не носит ограничительного характера. Например, система и способ согласно изобретению применимы к большинству видов жидких материалов, например, при перемещении масс в жидкопластичном или вязком состоянии, в том числе при сползании, обвалах, соскальзывании, опрокидывании и течении масс. Неисчерпывающий список примеров таких перемещений может включать: движения почвы, реголита и горной породы под действием силы тяжести; движения масс, вызванные обрушением, выемкой или эрозией склонов; земляные оползни; оползни из обломков пород; течения обломков пород; песчаные оползни; песчаные течения; оползни горных пород; течения горных пород; грязевые оползни; грязевые течения; грязевые потоки или лахары; сдвиги, оползни или течения почвы, осадочных пород или коллювиальных отложений; движения русла реки; лавины снега, льда, горных пород или почвы; ледяные потоки; ледники; сдвиги или течения отходов, мусора, утилизированных предметов или отбросов; течения рукотворных материалов; течения сточных вод; водные течения. Система и способ согласно изобретению применимы также в качестве локационной системы для установления местоположения людей и оборудования в подповерхностных средах, к которым относятся подземные, подводные и подледные среды (как на Земле, так и за ее пределами).
Настоящее изобретение раскрывает систему для отслеживания перемещений в подповерхностной среде, включающую: по меньшей мере первую, вторую и третью антенны для передачи сигналов электромагнитного излучения ЭМИ, для которых может быть вычислено время прохождения сигнала, каждая из которых соединена по меньшей мере с одним передатчиком сигналов, причем первая антенна предназначена для передачи сигналов, ассоциируемых с первой антенной, вторая антенна предназначена для передачи сигналов, ассоциируемых со второй антенной, и третья антенна предназначена для передачи сигналов, ассоциируемых с третьей антенной; совокупность элементов системы подземной локации СПЛ (UPS), расположенных на расстояниях друг от друга в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит по меньшей мере один передатчик системы СПЛ (UPS) для передачи сигнала ЭМИ системы СПЛ (UPS), включающего по крайней мере идентификатор, позволяющий по сигналу СПЛ (UPS) определить передавший его элемент СПЛ (UPS), и данные, содержащиеся в сигналах, принятых по меньшей мере от первой, второй и третьей антенн, и по меньшей мере один приемник системы СПЛ (UPS) для приема сигналов от первой антенны, сигналов от второй антенны и сигналов от третьей антенны; и антенну базовой станции, соединенную с базовым приемником и расположенную так, чтобы принимать сигналы СПЛ (UPS) и передавать сигналы СПЛ (UPS), или сигналы, соответствующие сигналам СПЛ (UPS), устройству обработки данных; в которой при перемещении по меньшей мере одного из элементов СПЛ (UPS) устройство обработки данных вычисляет по сигналам СПЛ (UPS) направление движения по меньшей мере одного перемещающегося элемента СПЛ (UPS) или скорость перемещения по меньшей мере одного перемещающегося элемента СПЛ (UPS) или оба этих параметра.
Настоящее изобретение предусматривает также систему слежения для отслеживания перемещений в подповерхностной среде, включающую: совокупность элементов системы подземной локации СПЛ (UPS), подвешиваемых в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит по крайней мере передатчик сигналов для передачи характерного сигнала ЭМИ, включающего идентификатор, позволяющий по сигналу определить передавший его элемент СПЛ (UPS); первую антенну, соединенную с первым приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы или сигналы, соответствующие характерным сигналам, устройству обработки данных; и по меньшей мере вторую антенну, соединенную с первым приемником сигналов или с другим приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы или сигналы, соответствующие характерным сигналам, устройству обработки данных; в которой устройство обработки данных, принимающее от первой антенны, а также по меньшей мере от второй антенны сигналы, соответствующие характерным сигналам от элементов СПЛ (UPS), устанавливает местоположение каждого передающего элемента СПЛ (UPS), имеющего свои собственные характерные сигналы, в процессе перемещения по меньшей мере одного перемещающегося элемента СПЛ (UPS) на основе времени прохождения, определяемого по времени передачи каждого характерного сигнала, и времени приема каждого характерного сигнала антеннами, что позволяет вычислить по крайней мере направление или скорость или оба эти параметра движения по меньшей мере одного перемещающегося элемента СПЛ (UPS).
Настоящее изобретение предусматривает также элемент системы подземной локации СПЛ (UPS), предназначенный для использования в системе слежения для отслеживания перемещений в подповерхностной среде, включающей по меньшей мере первую антенну, соединенную с первым приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы устройству обработки данных, содержащий по крайней мере: кожух и помещенный в нем передатчик сигналов, который передает характерный сигнал ЭМИ, включающий идентификатор, позволяющий по сигналу определить элемент СПЛ (UPS), причем устройство обработки данных, принимающее сигналы по меньшей мере от первой антенны, по характерным сигналам от элементов СПЛ (UPS) устанавливает местоположение каждого элемента СПЛ (UPS), имеющего свои собственные характерные сигналы, в процессе перемещения по меньшей мере одного перемещающегося элемента СПЛ (UPS) на основе данных, по которым можно вычислить время прохождения для каждого характерного сигнала, принятого по меньшей мере первой антенной, что позволяет по характерным сигналам, передаваемым элементами СПЛ (UPS), вычислить по крайней мере направление или скорость или оба эти параметра движения по меньшей мере одного перемещающегося элемента СПЛ (UPS).
Настоящее изобретение предусматривает также способ отслеживания перемещений в подповерхностной среде, включающий следующие шаги: а. установку совокупности элементов системы подземной локации СПЛ (UPS) в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит по крайней мере передатчик сигналов для передачи характерного сигнала ЭМИ, включающего идентификатор, позволяющий по характерному сигналу определить передавший его элемент СПЛ (UPS); b. прием сигналов ЭМИ от совокупности элементов СПЛ (UPS) из первого положения в процессе обмена данными с элементами СПЛ (UPS) и передача устройству обработки данных информации о времени приема каждого сигнала ЭМИ из первого положения; с. прием сигналов ЭМИ от совокупности элементов СПЛ (UPS) по меньшей мере из второго положения в процессе обмена данными с элементами СПЛ (UPS) и передача устройству обработки данных информации о времени приема каждого сигнала ЭМИ из второго положения; и d. обработку данных, в ходе которой определяют по крайней мере направление или скорость или оба эти параметра движения по меньшей мере одного перемещающегося элемента СПЛ (UPS).
В некоторых реализациях системы и способа согласно изобретению время прохождения вычисляют по меньшей мере частично на основе данных, передаваемых антеннам от атомных часов. В некоторых реализациях по меньшей мере один передатчик системы СПЛ (UPS) способен ретранслировать по меньшей мере один сигнал СПЛ (UPS), принятый от других элементов СПЛ (UPS), приемник системы СПЛ (UPS) способен принимать сигналы СПЛ (UPS) от других элементов СПЛ (UPS) для ретрансляции, и базовая антенна принимает сигналы СПЛ (UPS) по меньшей мере от одного элемента СПЛ (UPS). В некоторых реализациях каждая из названных антенн - первая, вторая и третья - последовательно передают сигналы в виде пакетов импульсов, и время прохождения вычисляют по меньшей мере частично по фазовому сдвигу между последовательными передачами. В некоторых реализациях по меньшей мере некоторые элементы СПЛ (UPS) содержат акустический приемник, и система содержит также совокупность акустических передатчиков, передающих акустические сигналы совокупности элементов СПЛ (UPS).
Каждый из элементов 10 СПЛ (UPS) имеет автономный источник питания, например литиевую батарею, и предпочтительно способен непрерывно в течение нескольких лет передавать и/или принимать данные об отдельных местоположениях, например, через протокол IP. В предпочтительной реализации передачу информации о местоположениях осуществляют с помощью передачи радиочастотных сигналов, способных проходить через среду, например в иллюстрированной реализации эта система работает на очень низких частотах ОНЧ (VLF) радиодиапазона. Такая система может передавать данные через горную породу на расстояния до 2000 метров. Однако в зависимости от окружающей среды могут быть пригодными системы передачи сигналов, использующие и другие виды электромагнитного излучения ЭМИ. Книга Stratton J.A., Electromagnetic Theory (Теория электромагнетизма), McGraw-Hill (1941), содержит формулу, позволяющую вычислить электрические и магнитные составляющие электромагнитной волны в среде следующим образом:


где:
α = коэффициент затухания, непер
z = расстояние распространения, м
ω = частота, рад/с
β = коэффициент фазы, рад/м
µ = магнитная проницаемость
σ = удельная проводимость, См/м
δ = толщина скин-слоя, м = глубина, на который волна уменьшается до  или (0,386) ее значения
или (0,386) ее значения
Глубина проникновения зависит от удельной проводимости (содержание минеральных веществ) и содержания воды (% влаги). Если массив горных пород обладает высокой удельной проводимостью, энергия передаваемого сигнала рассеется через несколько метров. Однако блоковое обрушение применяется при разработке руды относительно низкого качества, с содержанием полезного вещества от 0,4% до 1%. Более низкие частоты обеспечивают большую проницаемость, но при этом затрудняется точное определение времени прохождения сигналов.
На Фиг.1 представлена базовая локационная система, используемая при реализации способа согласно изобретению, которая с помощью принципа триангуляции локализует приемник, чтобы определить положение по координатам X, Y, Z. Каждый элемент 10 СПЛ (UPS) передает закодированный сигнал ЭМИ, например радиосигнал ОНЧ (VLF), включающий отличительный идентификатор, воспринимаемый компьютером 52 базовой станции, так что может быть определен конкретный элемент 10 СПЛ (UPS), отправивший сигнал. Местоположение элемента 10 СПЛ (UPS) определяется в виде точки в координатной сетке 4, которая охватывает обследуемую область 2, содержащую группу элементов 10.
Согласно изобретению в массив горных пород введена группа элементов 10 СПЛ (UPS). Каждый элемент 10, изображенный на Фиг.2 схематично, снабжен по крайней мере источником 11 питания и предпочтительно локационными приборами. Элементы 10 СПЛ (UPS) в предпочтительной реализации изобретения оборудованы устройством, способным как передавать, так и принимать сигналы (например, трансивером ОНЧ (VLF) - не показан), хотя в альтернативном варианте элементы 10 СПЛ (UPS) могут быть оборудованы устройством, способным передавать сигналы (например, передатчиком 19 ОНЧ (VLF)) и отдельным устройством, способным принимать сигналы (например, приемником 21 ОНЧ (VLF)). Хотя схематически эти элементы показаны в сферическом кожухе 12, кожух может иметь неправильную форму, воспроизводя очертания камня в массиве горных пород. Во внешнем кожухе 12 находится встроенный компьютер 14 предпочтительно вместе с трехкоординатным гироскопом 13, по меньшей мере одним трехкоординатным акселерометром 15 и внутренними тензодатчиками 17 и, возможно, трехкоординатным инклинометром 23. Тензодатчики 17, хотя и не являются частью локационной системы, могут использоваться для определения сил, воздействующих на элемент 10 СПЛ (UPS).
Чтобы ввести элементы 10 СПЛ (UPS) в массив горных пород в обследуемой области 2, как показано на Фиг.1, обычно бурят скважины от поверхности или выработки над массивом горных пород. Эти скважины имеют диаметр приблизительно 6 дюймов (15 см) и проходят через горную породу до глубины, соответствующей расположению самого глубокого элемента 10 СПЛ (UPS). В каждое отверстие вводят на определенную высоту и заливают раствором элементы 10. Находясь в отверстиях, элементы 10 СПЛ (UPS) могут быть подключены к общей линии питания (не показана), что позволит поддерживать полный заряд батарей в устройствах 10 до обрушения массива горных пород. С помощью этой линии продлевается продолжительность заряженного состояния и, таким образом, срок полезного использования элементов 10 СПЛ (UPS). Когда рудное тело начинает ломаться, линия питания будет отключена от элементов 10 СПЛ (UPS), и эти элементы автоматически перейдут на питание от батарей.
В предпочтительной реализации начальная конфигурация системы содержит координатную сетку 4, которую образуют первоначально проделанные скважины для установки элементов 10 СПЛ (UPS) в обследуемой области 2. Необходимо указать, начальная конфигурация системы может отличаться от «сетчатой», показанной на Фиг.1. Например, если располагать элементы 10 СПЛ (UPS) «конусом» (не показано), а не «сеткой», можно выполнять операцию введения элементов 10 в обследуемую область 2 в значительной степени с одного и того же места на поверхности, благодаря чему отпадает необходимость перемещения бурового оборудования по разным местам во время этой операции. Степень доступности отдельных мест на поверхности также может играть свою роль в выборе начальной конфигурации системы для размещения элементов 10 СПЛ (UPS), вводимых в подповерхностное пространство.
Отдельные элементы 10 СПЛ (UPS) вводят в скважину и регистрируют их начальное местоположение в компьютерной программе пространственной индикации. Инфраструктурная основа системы состоит из компьютера 52 базовой станции, который управляет связью на частотах ОНЧ (VLF) с антеннами 20 ОНЧ (VLF).
В предпочтительной реализации настоящего изобретения имеются по меньшей мере первая, вторая и третья антенны для передачи соответственно сигналов ЭМИ первой, второй и третьей антенны, в качестве которых могут выступать, как, например, в иллюстрированной реализации, антенны 20 ОНЧ (VLF). (Может применяться четыре, пять или, возможно, больше антенн 20, охватывающих массив горных пород на различных уровнях, как показано, например, в реализации на Фиг.8.) Каждая антенна 20 располагается в пределах дальности связи с учетом текущего и ожидаемых в будущем местоположений в массиве горных пород. Для большинства антенн 20 ОНЧ (VLF) в этой реализации необходима только функция передачи сигнала, а не приема сигнала, за исключением антенны 8 базовой станции, для которой необходима функция приема сигнала, осуществляемая как описано ниже. Антенны 20 соединены, например, коаксиальными соединительными кабелями 22 со станцией 24 атомных часов, которая содержит атомные часы 26 или соединена с такими часами. Каждый соединительный кабель 22, связывающий каждую антенну 20 со станцией 24 атомных часов, имеет одинаковую длину, независимо от расстояния между антеннами 20 и станцией 24 атомных часов, так что антенны 20 работают в синхронном режиме.
Как только элемент 10 СПЛ (UPS) начинает двигаться вместе с массивом горных пород или в массиве, первая антенна 20 ОНЧ (VLF) в момент времени T1 передает первый сигнал, включающий показания времени от атомных часов 26, который принимается отдельным элементом 10 СПЛ (UPS) и дополняется координатами X1Y1Z1, соответствующими положению элемента СПЛ (UPS) в момент приема сигнала. Таким образом, T1 соответствует начальной точке на синусоиде и обозначает время, когда первый сигнал отправляется первой антенной 20 ОНЧ (VLF), как показано на Фиг.3А. В предпочтительной реализации первая антенна 20 ОНЧ (VLF) передает пакет с предварительно заданным числом импульсов, разделенных между собой точно выверенными промежутками времени, например продолжительностью 5 миллисекунд каждый. Эта информация используется в системе измерения разности фаз, которая может быть реализована в виде системы цифровых измерений, работающей с зашумленными сигналами. Возникает возможность того, чтобы элементы 10 СПЛ (UPS) определяли по импульсам, путем их подсчета, какая именно антенна ОНЧ (VLF) передает сигнал; например, если передачу сигнала антенны 20 ОНЧ (VLF) осуществляют поочередно, после того как каждая антенна ОНЧ (VLF) отправляет определенное число импульсов, например 10 импульсов за 50 миллисекунд, то тогда известно, что после первых 10 импульсов от первой антенны 20 сигнал передается от второй антенны 20, а затем после очередных 10 импульсов сигнал передается от третьей антенны 20 и так далее.
Поскольку все антенны 20 ОНЧ (VLF) работают в синхронном режиме, Т2 соответствует второй точке на синусоиде и обозначает время, когда второй сигнал отправляется второй антенной 20 ОНЧ (VLF), как показано на Фиг.3В. Когда этот сигнал принимается отдельным элементом 10 СПЛ (UPS), он дополняется координатами X2Y2Z2, соответствующими положению этого элемента в момент приема второго сигнала (пакета импульсов). Таким образом, вторая антенна 20 ОНЧ (VLF) передает второй пакет импульсов (что может произойти сразу же после того, как закончится передача пакета импульсов первой антенной 20 ОНЧ (VLF)), разделенных между собой точно выверенными промежутками времени, например продолжительностью 5 миллисекунд каждый.
Аналогично Т3 образом соответствует третьей точке на синусоиде и обозначает время, когда третий сигнал отправляется третьей антенной 20 ОНЧ (VLF), если она имеется, как показано на Фиг.3С. Когда этот сигнал принимается отдельным элементом 10 СПЛ (UPS), он дополняется координатами X3Y3Z3, соответствующими положению этого элемента в момент приема третьего сигнала. Третья антенна 20 ОНЧ (VLF) передает третий пакет импульсов (что может произойти сразу же после того, как закончится передача пакета импульсов второй антенной 20 ОНЧ (VLF)), разделенных между собой точно выверенными промежутками времени, например продолжительностью 5 миллисекунд каждый.
В этой реализации каждый из элементов 10 СПЛ (UPS) может как передавать, так и принимать сигналы. Приняв сигналы от антенн 20 ОНЧ (VLF), элемент 10 СПЛ (UPS) определяет свое положение, а затем передает характерный сигнал, содержащий по меньшей мере уникальный идентификатор и данные о положении этого элемента 10 или же время прохождения сигнала. Характерный сигнал от передающего элемента 10 СПЛ (UPS) принимают и все другие элементы 10 СПЛ (UPS) в пределах дальности связи. Таким образом, характерные сигналы от других элементов 10 каскадно принимаются и передаются элементами 10, находящимися в пределах связи, по всей группе элементов 10 СПЛ (UPS), пока сигналы от всех (или по существу всех) элементов 10 не будут приняты антенной 8 базовой станции.
Антенна 8 базовой станции располагается в пределах дальности связи с учетом текущего и ожидаемых в будущем местоположений в массиве горных пород, при разработке с блоковым обрушением - предпочтительно (но не обязательно) в основании массива горных пород. Поскольку элементы 10 СПЛ (UPS) в этой реализации не только передают свои собственные данные, но также служат ретрансляторами в передаче данных, принятых от других элементов 10, антенна 8 базовой станции может располагаться в любом месте в пределах дальности связи какого-либо элемента 10 СПЛ (UPS) с учетом текущего и ожидаемых местоположений в массиве горных пород. Антенна 8 базовой станции принимает сигналы по меньшей мере от одного из элементов 10 СПЛ (UPS), вероятнее всего от элемента или элементов СПЛ (UPS), находящихся ближе всего к положению антенны 8 базовой станции, и передаваемые характерные сигналы всех элементов 10 содержат данные о положении каждого из них, отмеченные соответствующими уникальными идентификаторами каждого элемента 10. Ретрансляция данных от элементов 10 к антенне 8 базовой станции показана на Фиг.4.
Вслед за этим характерные сигналы от всех элементов 10 передаются с антенны 8 базовой станции обратно на компьютер 52 базовой станции, например, по коаксиальному кабелю. Компьютер 52 базовой станции вычисляет все изменения в положении элементов 10 СПЛ (UPS) на основе времени прохождения сигналов, принимаемых элементами 10 от антенн 20 ОНЧ (VLF). В данной реализации время прохождения сигнала может быть определено по фазовому сдвигу между несколькими передаваемыми сигналами, которые принимаются и получают временную метку на каждом элементе 10 СПЛ (UPS), которые его ретранслирует через матрицу элементов СПЛ (UPS) на антенну 8 базовой станции. Сдвиг фазы пропорционален расстоянию, пройденному сигналом, и может быть настроен таким образом, чтобы найти координаты (х, y, z) положения в определенный момент времени для каждого элемента 10, например, следующим образом.
Ниже описан математический фундамент системы измерения разности фаз, которая может быть реализована в виде системы цифровых измерений, работающей с зашумленными сигналами. Погрешность заключительного измерения при этом уменьшается благодаря усредняющему эффекту свертки. Следующие далее формулы приводятся, чтобы разъяснить по крайней мере один из подходов к анализу и использованию данных, источником которых служит настоящее изобретение. Вместе с тем способ согласно изобретению описывает систему, которая получает данные о местоположении, и не ограничивается тем, как именно эти данные будут обработаны или использованы.
Согласно уравнениям Максвелла электрическое поле в момент времени t в положении х может быть выражено следующим образом:

где:
λ = длина волны (также равно v/f, скорость/частота)
х = положение (расстояние), м
ω = частота, рад/с
Без потери общности можно рассматривать передаваемый сигнал как синусоиду:
S=sin(ωt)
Приемник (и тем самым элемент 10 СПЛ (UPS)) в точке с координатами (х, y, z) может рассматриваться как заключенный в объем. Допустим, имеется четыре передатчика (то есть антенны 20), А, В, С и D, расположенные в точках (хА, yA, za), (xB, yB, zB), (xC, yC, zC) и (xD, yD, zD), которые поочередно передают пакеты синусоидных волн, разделенных между собой точно выверенными промежутками, например каждые 5 миллисекунд. Сигналы, принимаемые приемником, будут иметь вид S=sin(ωt+δt), где δt - время прохождения сигнала. Такую зависимость можно представить в виде сдвига по фазе, который будет различным для каждого источника. Этот фазовый сдвиг, например, от передатчика А до приемника, выраженный через длину волны, составит:

где DA - расстояние от передатчика А до приемника, а λ - длина волны при прохождении через среду, соответствующая рассматриваемой частоте. Фазовый сдвиг преобразуется в расстояние следующим образом:

Принятый сигнал может быть представлен как синусоида с фазовым сдвигом следующими четырьмя уравнениями:
SA=sin(ωt+θА)
SB=sin{ωt+θB)
SC=sin(ωt+θC)
SD=sin(ωt+θD)
Сигналы могут быть сохранены в микросхемах внутри элемента 10 СПЛ (UPS), которые в цифровой форме определят сдвиг фазы в для каждого сигнала. Вся эта информация может быть также передана для таких вычислений обратно компьютеру 52 базовой станции. Абсолютные значения фаз на приемнике вычислить невозможно, вычислимы лишь относительные разности. Фазовые сдвиги представимы в виде гиперболических кривых, пересечение которых позволяет получить координаты (х, y, z) положения приемника. Чтобы обеспечить достаточное количество информации для трех переменных, которые укажут местоположение приемника с предпочтительной степенью точности, рекомендуется использовать четыре передатчика. Положение приемника можно определить и в том случае, если используются только три передатчика, хотя результат при этом будет менее точным.
Расстояние в пространстве между двумя точками, имеющими координаты (х, y, z) и (xA, yA, zA), определяется с помощью трехмерной теоремы Пифагора:

Измеренные сдвиги фаз между последовательными передачами сигнала можно представить в виде разностей между расстояниями от приемника до каждого из двух передатчиков. Определим DAB как разность между DA и DB, определенными выше. Разности расстояний можно выразить следующим образом:




Преобразовав уравнения, получим:




После возведения обеих частей каждого уравнения в квадрат и упрощения получим следующую систему уравнений:




Эта система уравнений решается и дает координаты х, y и z приемника и, таким образом, передающего элемента 10 СПЛ (UPS). Для вычисления местоположения других элементов СПЛ (UPS) по передаваемым ими сигналам могут быть использованы другие системы.
Хотя данная реализация была описана для случая разработки с блоковым обрушением, когда элементы 10 СПЛ (UPS) вводятся в массив горных пород через скважины, для специалистов в данной области очевидно, что элементы 10 могут также быть прикреплены к людям (например, шахтерам) или оборудованию, например машинам, транспортным средствам или автоматическим устройствам, находящимся в подповерхностной среде (включая подводную среду), и выполнять ту же функцию. Лицо или единица оборудования (с прикрепленным элементом 10 СПЛ (UPS)) может находиться в выработке в теле породы или в водоеме. Когда люди или оборудование перемещаются в подповерхностной среде, прикрепленный к ним элемент 10 СПЛ (UPS) функционирует так же, как и в случае когда он введен в слои горной породы, как описано выше. Зная положение прикрепленного элемента 10 СПЛ (UPS), можно получить информацию о перемещениях и местоположении людей или оборудования в подповерхностной среде.
Для специалистов в данной области очевидно также, что изобретение, описанное в этом документе, может использоваться в любой подповерхностной среде, проницаемой для радиочастотных сигналов. Например, настоящее изобретение может применяться в подводных средах, где элементы 10 СПЛ (UPS) могут использоваться для определения параметров потока воды или местоположения людей (например, водолазов) или оборудования на любой заданной глубине, например на дне водоема, в том числе на дне океана. Настоящее изобретение также может применяться в других средах, например за пределами Земли или в наносредах. Функциональные возможности настоящего изобретения не зависят от используемых частот. Может быть подобрана частота специально для конкретной среды, в которой используется локационная система согласно настоящему изобретению. В микросредах могут использоваться более высокие частоты, тогда как в макросреде могут использоваться очень низкие частоты.
В другой реализации настоящего изобретения каждый элемент 10 СПЛ (UPS) снабжен собственными атомными часами 18 и самостоятельно генерирует данные о времени, по которым может быть определено время прохождения сигнала до каждой антенны 20 ОНЧ (VLF), передаваемое антенне 8 базовой станции. Если массив горных пород начинает перемещаться, элементы 10 СПЛ (UPS) передают данные о местоположении или данные, из которых могут быть получены данные о местоположении, например данные о времени, которые будут приняты по меньшей мере двумя антеннами 20 ОНЧ (VLF), расположенными в пределах дальности связи с учетом текущего и ожидаемых в будущем местоположений в массиве горных пород, или, предпочтительно, тремя, четырьмя или пятью антеннами 20 ОНЧ (VLF), охватывающими массив горных пород на различных уровнях, как антенны 20, показанные на Фиг.5. В этой реализации антенны 20 ОНЧ (VLF) принимают сигналы от элементов 10 СПЛ (UPS) и передают принятые сигналы базовой станции 50. Здесь предпочтительно использование элементов 10 СПЛ (UPS), способных как передавать, так и принимать сигналы, но могут использоваться также элементы 10 СПЛ (UPS), способные передавать, но не принимать сигналы. Для передачи принятого сигнала базовой станции 50 все антенны 20 могут быть присоединены к одному передатчику сигнала (не показан) или же каждая антенна может быть присоединена к собственному передатчику.
Как указывалось выше, на основе пространственного варьирования импульсов сигналов, передаваемых с каждого элемента 10 СПЛ (UPS), определяется траектория перемещения каждого элемента 10 в пространстве с течением времени. По этой информации вычисляются эмпирические данные о траектории течения, скорости течения и динамических характеристиках обрушения. Данные могут быть введены в пространственную географическую информационную систему или ГИС. Система является источником эмпирических данных, анализ которых позволит понять динамику течений в массиве горных пород. Эти данные могут быть более точными, если разместить элемент 10 СПЛ (UPS) в кожухе, форма которого воспроизводит форму камня в массиве горных пород.
В этой реализации местоположение элемента 10 СПЛ (UPS) может быть определено по уравнению Е1:

Чтобы уменьшить погрешность определения местоположения элемента 10 СПЛ (UPS), уравнение Е1 может решаться разными способами. Предпочтительный способ заключается в том, чтобы наращивать задержку правой части уравнений и получать новые решения до тех пор, пока погрешность не будет сведена к минимуму.
Чтобы повысить точность работы системы, в определении местоположения может быть использован математический алгоритм, позволяющий внести коррекцию на варьирование характеристик сигнала при прохождении массива горных пород. Первый шаг к реализации такого математического алгоритма состоит в том, чтобы свести его к отдельному виду сигнала, например к акустическому сигналу. Вслед за этим алгоритм коррекции может быть распространен на любой вид сигнала, поскольку может быть построена общая формула для любых типов известных сигналов с помощью волнового уравнения, выводимого из сочетания трех основных физических свойств, а именно: сохранения импульса, сохранения массы и уравнения несжимаемой жидкости.
Общее волновое уравнение для акустических сигналов выглядит следующим образом:
 ,
,

ρ = массовая_плотность
K = модуль_объемной_деформации
Поскольку в предпочтительном случае для точного определения местоположения камня в обрушивающейся породе сигналы от элементов 10 СПЛ (UPS) принимают четыре антенны 20 ОНЧ (VLF), для оценки положения камня необходимо решить следующую систему уравнений (Е2):

Способ решения состоит в сохранении уравнения 1 и замене других уравнений на результат вычитания уравнения 1 из каждого из них. Так будет получена система вида АХ+ВХ+CZ=D, т.е. система линейных уравнений, для которой несложно получить решение. Однако после того как решение будет найдено, следует выполнить проверку первого, нелинейного (или сферического) уравнения. Это может представлять значительные трудности, если положить расстояния Ri постоянными. В чисто математической форме система может дать пустое множество решений. Правда, при этом предполагается, что расстояние от каждого источника до элемента 10 СПЛ (UPS) постоянно, то есть время прохождения сигнала в среде горной породы известно с абсолютной достоверностью. Однако в общем случае дело обстоит не так.
На Фиг.6 представлена ситуация, где время прохождения каждого сигнала имеет вероятностную природу. Чем больше источников добавляются в систему, тем более сужается зона разброса, то есть достигается все более близкое приближение к искомому местоположению. Уравнение (Е1) может быть преобразовано так, чтобы отразить наличие зоны разброса:

В другой реализации настоящего изобретения наряду с анализом фронта обрушения акустическими методами используются атомные часы 18. Эта реализация сочетает в себе передачу как акустических сигналов, так и сигналов на очень низких частотах ОНЧ (VLF), и может предоставлять очень точную и полезную информацию о поведении фронта обрушения. Такое решение, хотя и более сложное, чем реализация, описанная выше, способно обеспечить более качественную информацию о движении и составе горной породы. На Фиг.7 показан элемент СПЛ (UPS), пригодный для использования в этой реализации, с микрофоном 16 для приема акустических сигналов и с атомными часами 18.
Волны, которые перемещаются через горную породу со скоростью света, должны достигать приемника быстрее, чем звуковые волны, поскольку звуковые волны движутся сквозь горную породу не так быстро, как радиоволны. В общем случае это различие зависит от наличия разломов в породе. Так, при одновременной отправке радиосигнала и акустического сигнала по разнице во времени прибытия радиоволны (перемещавшейся со скоростью света) и звуковой волны в элемент 10 СПЛ (UPS) можно определить качество горной породы, через которую прошли сигналы, т.е. количество и степень разломов. В силу коротких расстояний между элементами 10 СПЛ (UPS) и тем фактом, что сигнал в диапазоне ОНЧ (VLF) передается со скоростью света, атомные часы 18 должны обладать очень высокой разрешающей способностью.
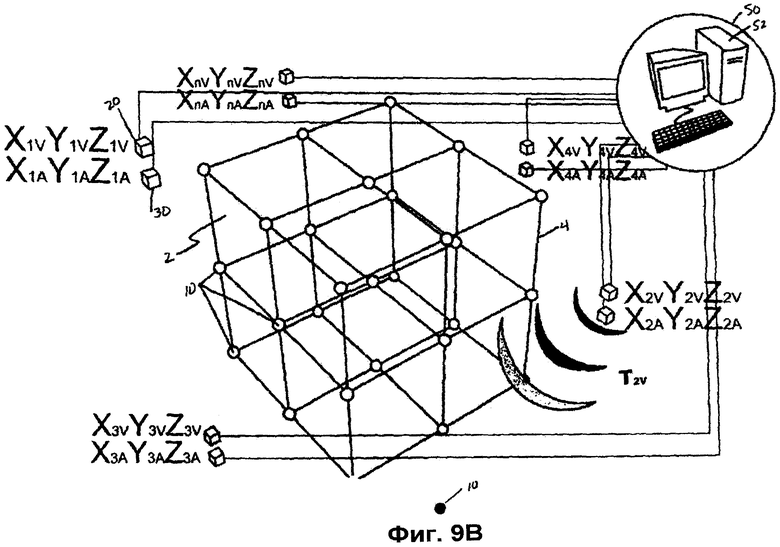
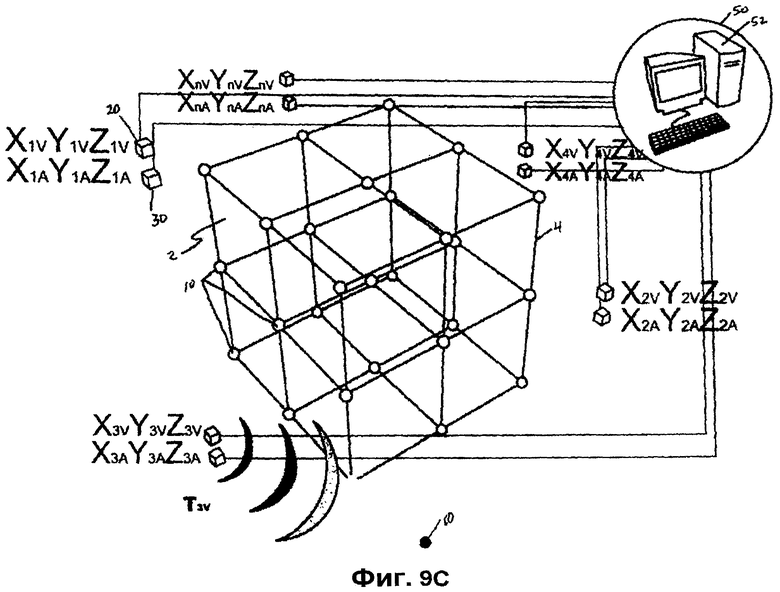
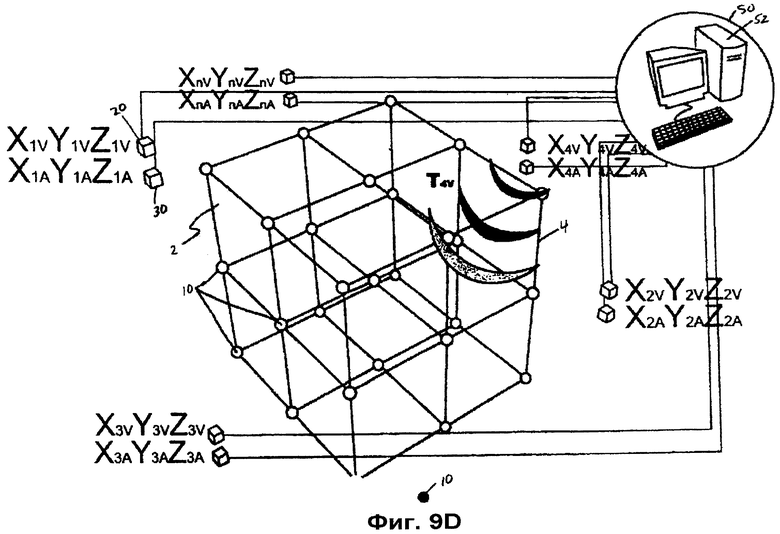
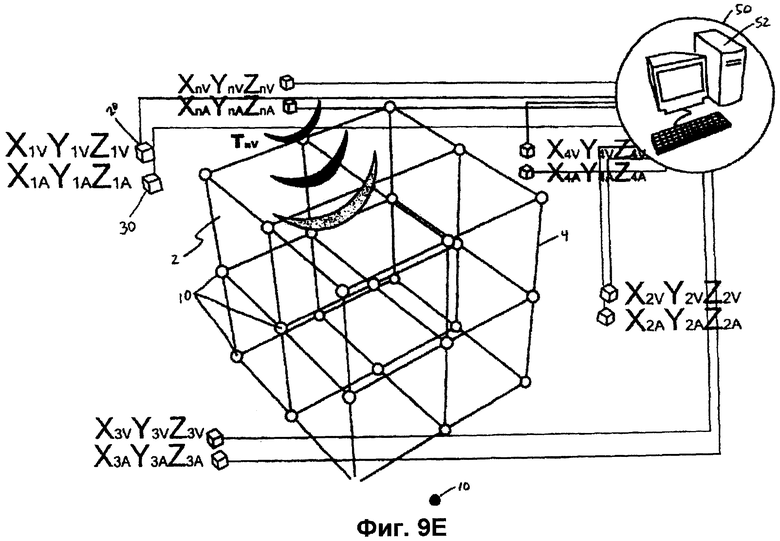
Связь с элементами 10 СПЛ (UPS) в этой реализации происходит через радиосеть, работающую в диапазоне ОНЧ (VLF) с применением антенн 20 ОНЧ (VLF). Антенны 20 ОНЧ (VLF) установлены по краям рудного тела в известных местоположениях (X1V, Y1V, Z1V), (X2V, Y2V, Z2V) и (X3V, Y3V, Z3V). Акустический компонент в этой реализации содержит набор внешних акустических передатчиков или генераторов 30, выполняющих функцию локации, которые используются в комбинации с антеннами 20 ОНЧ (VLF). Акустические передатчики 30 установлены по краям рудного тела в известных местоположениях (X1A, Y1A, Z1A), (X2A, Y2A, Z2A) и (X3A, Y3A, Z3A). Предпочтительно, чтобы каждый акустический передатчик 30 был соединен с базовой станцией 50.
В этой реализации элементы 10 СПЛ (UPS), акустические передатчики 30 и антенны 20 ОНЧ (VLF) располагают так, как описано выше. Когда элемент 10 СПЛ (UPS) начинает перемещаться, срабатывает детектор движения внутри каждого такого элемента. Трехкоординатные инклинометры, акселерометры и тензодатчики собирают информацию о перемещении элементов 10 СПЛ (UPS). Эта информация составляет данные о перемещении отдельного элемента 10 СПЛ (UPS), которые хранятся в памяти компьютера 14, встроенного в элемент СПЛ (UPS), для передачи антеннам 20 ОНЧ (VLF) и далее через сеть антенн 20 ОНЧ (VLF) - базовой станции 50, где данные подставляются в математические уравнения, подлежащие решению. Чтобы гарантировать точность, в этой реализации все атомные часы должны быть предварительно синхронизированы.
Когда происходит перемещение, детектор движения в элементе 10 СПЛ (UPS) подает сигнал этому элементу 10, выводя его из «спящего» режима, и по прошествии предварительно установленного промежутка времени элемент 10 СПЛ (UPS) через передатчик 19 ОНЧ (VLF) посылает антеннам 20 ОНЧ (VLF) и далее базовой станции 50 начальный сигнал, указывающий на то, что элемент 10 переместился в новое положение. На Фиг.8 схематически представлена ситуация начального перемещения отдельного элемента 10 СПЛ (UPS), когда сигнал о начальном перемещении элемента 10 передается от этого элемента на частотах ОНЧ (VLF) антеннам 20 ОНЧ (VLF), от которых поступает в базовую станцию 50 (как показано на Фиг.11). Компьютер 52 базовой станции обрабатывает данные, переданные на частотах ОНЧ (VLF), и дает команду всем акустическим передатчикам 30 на подачу сигнала элементам 10 СПЛ (UPS), как показано на Фиг.9А-9Е, с целью измерения длительности прохождения акустического сигнала. Подобным образом компьютер 52 базовой станции дает команду всем антеннам 20 ОНЧ (VLF) на подачу сигнала элементам 10 СПЛ (UPS), как показано на Фиг.10А-10С, с целью измерения длительности прохождения сигнала со скоростью света.
В еще одной реализации изобретения нет необходимости, чтобы элементы 10 СПЛ (UPS) посылали сигнал о начале перемещения. Вместо этого акустические передатчики 30 через заданные промежутки времени посылают сигналы, которые принимают элементы 10 СПЛ (UPS). Аналогичным образом антенны 20 ОНЧ (VLF) через заданные промежутки времени также посылают сигналы, которые принимают элементы СПЛ (UPS) 10.
Когда в этой реализации передача сигналов на частотах ОНЧ (VLF), передача акустических сигналов и сбор данных будут завершены, базовой станции 50 будет отправлено предпочтительно два набора данных. Эти наборы данных могут использоваться, чтобы получить, помимо прочей информации, время прохождения радиоволнами в диапазоне ОНЧ (VLF) и звуковыми волнами расстояний до элементов 10 СПЛ (UPS). Благодаря тому что данные, передаваемые на частотах ОНЧ (VLF), прибудут быстрее, а звуковые волны - медленнее, сравнение и анализ этих данных встроенными компьютерами 14 в элементах 10 СПЛ (UPS) помогут получить сведения о характеристиках горной породы. На Фиг.11 показано, как данные о прохождении сигналов ОНЧ (VLF)/ показания атомных часов, а также данные о прохождении звуковых волн, передаются обратно базовой станции 50 в качестве параметров в математических вычислениях.
Передача базовой станции 50 данных на частотах ОНЧ (VLF)/ показаний атомных часов, а также данных звуковых волн может осуществляться различными способами. Например, в предпочтительной реализации каждый элемент 10 СПЛ (UPS) может быть оборудован функцией ретранслятора и способен принимать и ретранслировать наборы данных от соседних элементов 10. Эта ретрансляционная матрица реле может передавать наборы данных от одного элемента 10 СПЛ (UPS) другому либо в случайном порядке, либо сохраняя общее направление к базовой станции 50, выполняя по существу функцию каскадирования сигналов с данными между элементами 10 СПЛ (UPS), пока, наконец, элемент или элементы СПЛ (UPS), находящиеся на самом близком расстоянии к базовой станции 50, не передадут наборы данных непосредственно базовой станции 50 (или приемнику ОНЧ (VLF), который может вслед за этим передать наборы данных базовой станции). При наличии такой ретрансляционной матрицы требуется передача сигналов только на небольшие расстояния (например, менее 30 метров между элементами СПЛ (UPS)), что позволяет элементам 10 СПЛ (UPS) экономить мощность.
В другой реализации изобретения каждый элемент 10 СПЛ (UPS) передает наборы данных антенне 20 ОНЧ (VLF), которая ретранслирует их далее базовой станции 50. В еще одной реализации изобретения каждый элемент 10 СПЛ (UPS) передает наборы данных непосредственно базовой станции 50.
В некоторых реализациях каждая передача сигнала (как акустического, так и на радиочастотах ОНЧ (VLF)) предпочтительно получает временные метки, устанавливаемые мгновенно атомными часами 18 передающего устройства во время передачи и атомными часами 18 принимающего устройства во время приема. По этой информации компьютер 52 базовой станции вычисляет время прохождения для каждого акустического сигнала, отправленного различными акустическими передатчиками 30 (время от его передачи акустическим передатчиком 30 до его приема элементом 10 СПЛ (UPS)); и время прохождения каждого радиосигнала ОНЧ (VLF) (время от его передачи антенной 20 ОНЧ (VLF) до его приема элементом 10 СПЛ (UPS)). Применив к каждому набору данных триангуляцию, можно получить точную оценку положения элемента 10 СПЛ (UPS) в любой момент времени в пределах нужного временного промежутка, что в итоге позволяет оценить перемещение горной породы. Точность описания траектории зависит от количества используемых акустических передатчиков 30 и антенн 20 ОНЧ (VLF). С добавление каждого дополнительного акустического передатчика 30 или антенны 20 ОНЧ (VLF) достигается большая точность в вычислении фактического перемещения.
Следует отметить, что система и способ слежения согласно настоящему изобретению могут быть реализованы с передачей только одного типа сигналов. Однако дополнительная информация, получаемая за счет использования двух различных типов сигналов, например, как в описанной реализации, акустических и радиосигналов на ОНЧ (VLF), может значительно улучшить точность анализа данных.
Радиосигналы на ОНЧ (VLF) перемещаются через горную породу на значительно более высокой скорости, чем акустические сигналы. Благодаря этому в реализации изобретения с использованием частот ОНЧ (VLF) достигается более высокая точность, поскольку при проставлении временных меток в моменты приема и передачи используются атомные часы 18. Такие данные называют «плотными», в отличие от «рыхлых» данных, передаваемых с акустическими сигналами, для которых не требуется той же точности при проставлении временных меток. При каждом повторном применении способа согласно изобретению будут наблюдаться различия между местоположением, определенным по «рыхлым» данным и по «плотным» данным. Анализ этих различий позволяет описать качество горной породы между всеми источниками сигналов, расположенными вне рудного тела. Большее расхождение (разность двух значений времени прохождения сигнала) указывает на большую фрагментированность и меньшую плотность горной породы. Скорость перемещения радиосигналов на частотах ОНЧ (VLF) через горную породу значительно выше, чем скорость перемещения акустических сигналов, а потому от акустических сигналов следует ожидать большей погрешности. Эта погрешность, сопоставляемая с меньшей погрешностью системы, работающей на частотах ОНЧ (VLF), обогащает систему локационных датчиков дополнительной информацией. Это, в свою очередь, позволяет в больших подробностях представить фронт обрушения.
В результате будет получена концептуальная картина состава фронта обрушения в момент анализа. Процедуру повторяют через определенные промежутки, предпочтительно ежедневно или еженедельно, например, для того чтобы описывать поведение рудного тела при ведении разработки твердых полезных ископаемых этим способом.
В еще одной реализации изобретения для локации используют только акустические устройства. На Фиг.12 схематически изображен элемент 70 СПЛ (UPS) для этой реализации, предусматривающей также набор внешних акустических передатчиков 30 для локации и антенн 20 ОНЧ (VLF) для передачи данных о времени прохождения сигнала к компьютеру 52 базовой станции для триангуляции. В этой реализации элементы 70 СПЛ (UPS) могут иметь все те же внутренние компоненты, что и элементы 10 СПЛ (UPS) в ранее описанной реализации, за исключением того, что в этой реализации в элементах 70 СПЛ (UPS) не требуется атомных часов; вместо этого при расчетах положения элементов 70 в определенный момент времени методом триангуляции используется относительное время приема разными антеннами ОНЧ (VLF) (которые и здесь могут предоставлять данные о времени) и акустическими приемниками.
В этой реализации можно использовать либо антенны 20 ОНЧ (VLF), как в предпочтительной реализации, либо рамочные антенны 40 ОНЧ (VLF), в более предпочтительном варианте - две рамочные антенны 40 ОНЧ (VLF). Благодаря использованию рамочных антенн 40 ОНЧ (VLF) обеспечивается большая зона охвата при передаче и получении сигналов ОНЧ (VLF). На Фиг.13 показано исходная расстановка рамочных антенн 40 ОНЧ (VLF). Одна антенна располагается на поверхности, а другая - под обследуемой областью. Антенна, расположенная под обследуемой областью, может быть помещена, например, в горных выработках.
В другой реализации изобретения вместо рамочных антенн 40 ОНЧ (VLF) могут использоваться антенны ОНЧ (VLF) с ферритовым сердечником. Если антенна 40 ОНЧ (VLF) вместо того, чтобы образовать непрерывную петлю, будет обернута вокруг ферритового сердечника, это позволит передавать радиосигналы ОНЧ (VLF) из известной точки, поскольку каждая антенна ОНЧ (VLF) с ферритовым сердечником может быть помещена в предварительно заданное место. Элементы 70 СПЛ (UPS) вводятся в скважины, образующие сетку, как в реализации, описанной выше.
Когда элемент 70 СПЛ (UPS) начинает перемещаться, срабатывает детектор 73 движения (или трехкоординатный гироскоп 13), находящийся внутри кожуха 72 этого элемента 70. Трехкоординатные инклинометры 75, акселерометры 76 и тензодатчики 77 собирают данные о перемещении и записывают их в память компьютера 74, встроенного в элемент 70 СПЛ (UPS), для передачи через антенны 20 ОНЧ (VLF) базовой станции 50, где данные подставляются в математические уравнения, подлежащие решению. Хотя все эти признаки могут быть реализованы в виде нескольких компонентов для обеспечения избыточности, следует отметить, что для выполнения соответствующей функции необходим только один компонент каждого типа.
В процессе сбора информации от датчиков детектор 73 движения посылает сигнал о перемещении встроенному компьютеру 74. Этот сигнал затем передается антеннами 20 ОНЧ (VLF) на базовую станцию 50. Компьютер 52 базовой станции обрабатывает данные, полученные на частотах ОНЧ (VLF), и дает команду всем акустическим передатчикам 30 на подачу сигнала элементам 70 СПЛ (UPS), начиная акустическую локацию для установления положения элемента 70. Детектор 73 движения и кратковременная память встроенного компьютера 74 позволяют сократить время, в течение которого к компьютерам и датчикам подведено питание, что позволяет пользоваться «спящим» режимом, когда элемент 70 СПЛ (UPS) неподвижен в течение предварительно заданного времени, что, в свою очередь, сокращает потребление энергии и продлевает время, в течение которого элемент 70 может использоваться для сбора данных.
На Фиг.14А-14Е представлено измерение времени прохождения каждого сигнала от базовой станции 50 к элементу 70 СПЛ (UPS). Местоположение элемента 70 СПЛ (UPS) определяют с использованием матричного исчисления для количества сигналов, равного n. Для повышения точности используются различные комбинации параметров сигналов, которые при усреднении позволяют получить более надежную оценку.
На Фиг.15 изображена передача элементом 70 СПЛ (UPS) данных о времени обратно на базовую станцию 50 для триангуляции. В завершение процедуры определения местоположения сигнал со всеми данными, хранящимися в каждом элементе 70 СПЛ (UPS), передают на компьютер 52 базовой станции для выполнения расчетов, анализа данных и, если требуется, визуализации. В этой реализации могут использоваться технологии передачи акустических сигналов, аналогичные тем технологиям, которые используются в настоящее время в речевой связи на частотах ОНЧ (VLF) и в системах микросейсмического мониторинга. Пропускная способность при этом зависит от типа горной породы и разрешающей способности локации.
В другой реализации изобретения атомные часы 18 имеются в каждом элементе 80 СПЛ (UPS), но при этом не используются акустические сигналы, и потому нет необходимости в микрофонах внутри элементов 80. На Фиг.16 схематически изображен элемент 80 СПЛ (UPS) в этой реализации.
Когда в этой реализации изобретения начинается перемещение элементов 80 СПЛ (UPS), детекторы движения приводят эти элементы 80 в активное состояние, и система начинает передачу сигналов. Трехкоординатные инклинометры и акселерометры собирают информацию о перемещении горной породы. Элемент 80 СПЛ (UPS) отправляет базовой станции 50 сигнал о том, что изменилось его местоположение.
К началу процедуры триангуляции все атомные часы 18 должны быть синхронизированы, чтобы обеспечить высокую точность. Может быть достаточным использование менее дорогих высокоточных часов вместо атомных часов 18. Элементы 80 СПЛ (UPS) через антенны 20 ОНЧ (VLF) передают базовой станции 50 данные о времени прохождения сигнала для вычисления местоположения элемента 80. Когда элементы 80 СПЛ (UPS) получат сигналы от антенн 20 ОНЧ (VLF) и запишут их в памяти встроенных компьютеров, сигнал с собранными данными будет передан компьютеру 52 базовой станции, где выполняются вычисления.
Компьютер 52 базовой станции вычисляет время, за которое каждый сигнал дошел до элемента 80 СПЛ (UPS). Методом триангуляции получают точную картину перемещений и текущего местоположения элемента 80 СПЛ (UPS). Точность описания траектории и общая точность подземной системы СПЛ (UPS) зависит от количества используемых антенн 20 ОНЧ (VLF). С добавлением каждой дополнительной антенны 20 ОНЧ (VLF) картина перемещения рассчитывается более точно.
Преимуществом такого решения является высокая точность благодаря тому, что сигнал передается со скоростью света и используются атомные часы 18. Кроме того, это решение отличается устойчивостью и улучшенной живучестью. Первоначальная стоимость развертывания системы высока, однако при долгосрочной эксплуатации эта система может оказаться менее затратной.
В еще одной реализации изобретения могут использоваться элементы СПЛ (UPS), принцип действия которых основан на гироскопах (не показаны). В этой реализации в элементах СПЛ (UPS) не требуются микрофоны и атомные часы. Связь с элементами 10 СПЛ (UPS) происходит через радиосеть, работающую в диапазоне ОНЧ (VLF) с применением большой рамочной антенны, предпочтительно двух больших рамочных антенн 40. В этой реализации нет необходимости в антеннах ОНЧ (VLF) с ферритовым сердечником.
Начальная конфигурация системы элементов 10 СПЛ (UPS) в этой реализации изобретения аналогична конфигурации в первой реализации. Когда элементы 10 СПЛ (UPS) начинают движение и перемещаются в пространстве, приводится в действие система внутренних локационных датчиков в элементах 10. Акселерометры фиксируют движение, а трехкоординатные гироскопы фиксируют незначительные смещения и повороты. Эта информация, содержащая в себе данные о координатах х, y, z отдельных элементов СПЛ (UPS), записывается в память встроенного компьютера 14, откуда она может быть передана по радиосети ОНЧ (VLF).
Как и в предыдущих реализациях, как только элемент 10 СПЛ (UPS) начинает перемещаться, он передает данные о своем местоположении рамочным антеннам 40 и далее базовой станции 50 для отображения. Поскольку каждый элемент 10 СПЛ (UPS) имеет систему передачи сигналов в диапазоне ОНЧ (VLF), хранящаяся в нем информация может быть передана элементом 10 рамочным антеннам 10 ОНЧ (VLF). Эта система является односторонней, и загрузка данных происходит здесь на низких скоростях, а именно на скоростях порядка нескольких бодов. Данные о местоположении из элементов 10 СПЛ (UPS) будут загружены для отображения на компьютер 52 базовой станции за несколько последовательных сеансов низкоскоростной связи. В этой реализации математические вычисления, описанные выше, не требуются, поскольку в каждый элемент 10 СПЛ (UPS) встроены необходимые приборы, так что местоположение определяет непосредственно система встроенных локационных датчиков.
По мере продолжения обрушения происходит перемещение сразу нескольких элементов 10 СПЛ (UPS). В этой реализации каждый элемент СПЛ (UPS) передает данные в случайно выбранные моменты времени, чтобы свести к минимуму потери информации вследствие столкновений. Это позволяет передавать все данные на низкой скорости, что необходимо, поскольку передача сигналов на ОНЧ (VLF) отличается очень низкой информационной емкостью. Однако предполагается, что движение в теле породы происходит медленно, а потому низкая скорость передачи данных не представляет проблемы.
Даже в самых лучших гироскопах происходит смещение приблизительно на один градус в час. Для компенсирования смещения гироскопа при применении этого способа может потребоваться повторная привязка к эталонному показанию. Преимущества этой реализации - минимальные требования к оборудованию и простота конфигурации системы, передающей сигналы.
Различные реализации настоящего изобретения были описаны здесь в качестве примеров, и специалистам в данной области техники должно быть очевидно, что возможны и иные варианты и модификации, не выходящие за пределы объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ, СИСТЕМА И СПОСОБ | 2015 |
|
RU2710580C2 |
| ГЛУБИННЫЕ ЭЛЕКТРОМАГНИТНЫЕ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ СКРЕЩЕННЫХ МАГНИТНЫХ ДИПОЛЕЙ | 2005 |
|
RU2377608C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА, СИСТЕМА БЕСТРАНШЕЙНОГО ПОДЗЕМНОГО БУРЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА | 1996 |
|
RU2175368C2 |
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| СПОСОБ КАРТИРОВАНИЯ КОЛЛЕКТОРА УГЛЕВОДОРОДОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2006 |
|
RU2428719C2 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
| УСТРОЙСТВО И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ, СИСТЕМА СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2004 |
|
RU2450255C2 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| СПОСОБ НАПРАВЛЕННОГО БУРЕНИЯ И СИСТЕМА, ИСПОЛЬЗУЮЩИЕ УЧАСТОК ОБСАДНОЙ ТРУБЫ ПО МЕНЬШЕЙ МЕРЕ С ОДНИМ УСТРОЙСТВОМ ПЕРЕДАЧИ И ПРИЕМА ДАННЫХ | 2015 |
|
RU2673090C2 |
| СПОСОБ ВЕДЕНИЯ ЗАЩИЩЕННОЙ РАДИОСВЯЗИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 1995 |
|
RU2108675C1 |
Заявлена система для отслеживания перемещений объектов в подповерхностной среде, которая может быть использована для отслеживания динамики течения в текучей среде, такой как горнорудная порода, или для отслеживания перемещений людей или перемещающихся объектов под уровнем поверхности. Множество элементов системы подземной локации СПЛ (UPS), расположенных в подповерхностной среде, подают характерные сигналы на множество антенн, передающих эти сигналы на устройство обработки данных. Таким образом, система определяет изменение положения элемента СПЛ (UPS) для расчета движения текучей массы или положений и перемещений людей или объектов под уровнем поверхности. Достигаемый технический результат - повышение точности отслеживания перемещений в подповерхностной среде. 4 н. и 20 з.п. ф-лы, 16 ил.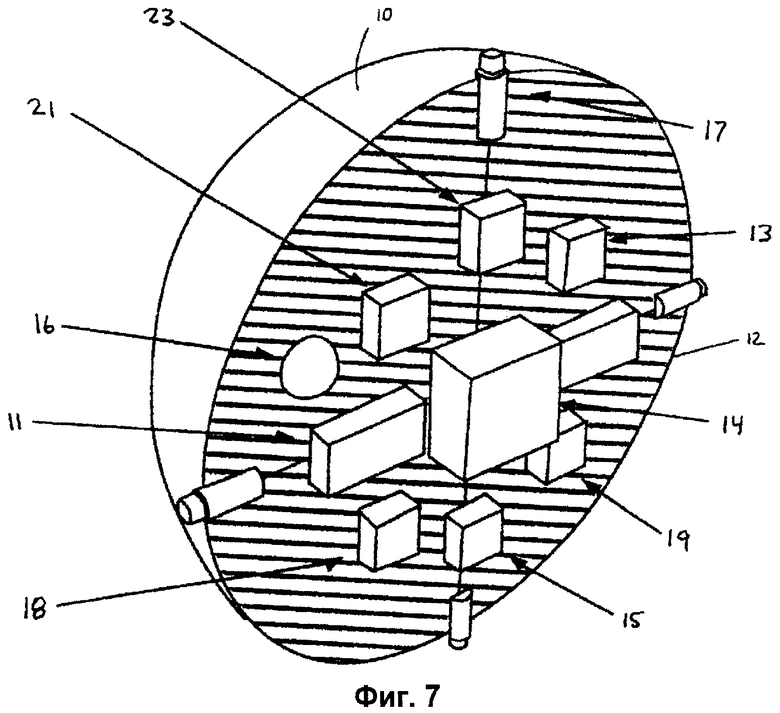
1. Система для отслеживания перемещений в подповерхностной среде, содержащая:
по меньшей мере, первую, вторую и третью антенны для передачи сигналов электромагнитного излучения (ЭМИ), по которым может быть вычислено время прохождения сигнала, каждая из которых соединена, по меньшей мере, с одним передатчиком сигналов, причем первая антенна предназначена для передачи сигналов, ассоциируемых с первой антенной, вторая антенна предназначена для передачи сигналов, ассоциируемых со второй антенной, и третья антенна предназначена для передачи сигналов, ассоциируемых с третьей антенной;
множество элементов системы подземной локации СПЛ (UPS), расположенных на расстояниях друг от друга в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит
по меньшей мере, один передатчик системы СПЛ (UPS) для передачи сигнала ЭМИ системы СПЛ (UPS), включающего, по крайней мере, идентификатор, позволяющий по сигналу СПЛ (UPS) определить передавший его элемент СПЛ (UPS), и данные, содержащиеся в сигналах, принятых, по меньшей мере, от первой, второй и третьей антенн; и,
по меньшей мере, один приемник системы СПЛ (UPS) для приема сигналов от первой антенны, сигналов от второй антенны и сигналов от третьей антенны; и антенну базовой станции, соединенную с базовым приемником и расположенную так, чтобы принимать сигналы СПЛ (UPS) и передавать сигналы СПЛ (UPS), или сигналы, соответствующие сигналам СПЛ (UPS), устройству обработки данных;
в которой при перемещении, по меньшей мере, одного из элементов СПЛ (UPS) устройство обработки данных вычисляет по сигналам СПЛ (UPS) направление движения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS) или скорость перемещения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS) или оба этих параметра.
2. Система по п.1, отличающаяся тем, что время прохождения вычисляют, по меньшей мере, частично на основе данных, передаваемых, по меньшей мере, первой, второй и третьей антеннам от атомных часов.
3. Система по п.2, отличающаяся тем, что, по меньшей мере, один передатчик системы СПЛ (UPS) способен ретранслировать, по меньшей мере, один сигнал СПЛ (UPS), принятый от других элементов СПЛ (UPS), приемник системы СПЛ (UPS) способен принимать сигналы СПЛ (UPS) от других элементов СПЛ (UPS) для ретрансляции, и антенна базовой станции принимает сигналы СПЛ (UPS), по меньшей мере, от одного элемента СПЛ (UPS).
4. Система по п.2, отличающаяся тем, что каждая из названных антенн - первая, вторая и третья - последовательно передает сигналы в виде пакетов импульсов, и время прохождения вычисляют, по меньшей мере, частично по фазовому сдвигу между последовательными передачами.
5. Система по п.2, отличающаяся тем, что подповерхностная среда содержит жидкое вещество, и элементы СПЛ (UPS) погружены в это жидкое вещество.
6. Система по п.2, отличающаяся тем, что элементы СПЛ (UPS) прикреплены к людям или подвижному оборудованию.
7. Система слежения для отслеживания перемещений в подповерхностной среде, содержащая:
совокупность элементов системы подземной локации СПЛ (UPS), подвешиваемых в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит, по крайней мере, передатчик сигналов для передачи характерного сигнала ЭМИ, включающего идентификатор, позволяющий по сигналу определить передавший его элемент СПЛ (UPS);
первую антенну, соединенную с первым приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы или сигналы, соответствующие характерным сигналам, устройству обработки данных; и, по меньшей мере, вторую антенну, соединенную с первым приемником сигналов или с другим приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы или сигналы, соответствующие характерным сигналам, устройству обработки данных;
отличающаяся тем, что устройство обработки данных, принимающее от первой антенны, а также, по меньшей мере, от второй антенны сигналы, соответствующие характерным сигналам от элементов СПЛ (UPS), устанавливает местоположение каждого передающего элемента СПЛ (UPS), имеющего свои собственные характерные сигналы, в процессе перемещения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS) на основе времени прохождения, определяемого по времени передачи каждого характерного сигнала, и времени приема каждого характерного сигнала антеннами, что позволяет вычислить, по крайней мере, направление или скорость или оба эти параметра движения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS).
8. Система слежения по п.7, отличающаяся тем, что содержит в себе третью антенну, соединенную с первым приемником сигналов или с другим приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS).
9. Система слежения по п.7, отличающаяся тем, что элементы СПЛ (UPS) погружены в жидкое вещество, и характерные сигналы, передаваемые элементами СПЛ (UPS), которые перемещаются вместе с движением жидкого вещества, позволяют вычислить, по крайней мере, направление или скорость или оба эти параметра движения жидкого вещества.
10. Система слежения по п.7, отличающаяся тем, что, по меньшей мере, некоторые из элементов СПЛ (UPS) содержат также приемник для приема сигналов от антенн.
11. Система слежения по п.7, отличающаяся тем, что, по меньшей мере, некоторые из элементов СПЛ (UPS) содержат акустический приемник, и система содержит также множество акустических передатчиков, передающих акустические сигналы совокупности элементов СПЛ (UPS).
12. Система слежения по п.7, отличающаяся тем, что сигнал ЭМИ представляет собой сигнал очень низкой частоты ОНЧ (VLF).
13. Система слежения по п.7, отличающаяся тем, что, по меньшей мере, некоторые из элементов СПЛ (UPS) способны принимать и ретранслировать характерные сигналы от других элементов СПЛ (UPS).
14. Элемент СПЛ (UPS), предназначенный для использования в системе слежения для отслеживания перемещений в подповерхностной среде, содержащей, по меньшей мере, первую антенну, соединенную с первым приемником сигналов и расположенную так, чтобы принимать характерные сигналы от элементов СПЛ (UPS) и передавать характерные сигналы устройству обработки данных, содержащий, по крайней мере:
кожух, и
помещенный в кожухе передатчик сигналов, передающий характерный сигнал ЭМИ, имеющий идентификатор, позволяющий по сигналу определить элемент СПЛ (UPS),
отличающийся тем, что устройство обработки данных, принимающее сигналы, по меньшей мере, от первой антенны, по характерным сигналам от элементов СПЛ (UPS) устанавливает местоположение каждого элемента СПЛ (UPS), имеющего свои собственные характерные сигналы, в процессе перемещения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS) на основе данных, по которым можно вычислить время прохождения для каждого характерного сигнала, принятого, по меньшей мере, первой антенной, что позволяет по характерным сигналам, передаваемым элементами СПЛ (UPS), вычислить, по крайней мере, направление или скорость или оба эти параметра движения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS).
15. Элемент СПЛ (UPS) по п.14, отличающийся тем, что дополнительно содержит акустический приемник.
16. Элемент СПЛ (UPS) по п.14, отличающийся тем, что сигнал ЭМИ представляет собой сигнал очень низкой частоты ОНЧ (VLF).
17. Элемент СПЛ (UPS) по п.14, отличающийся тем, что дополнительно содержит приемник для приема сигналов от антенн и атомные часы, являющиеся источником данных для сигналов, принимаемых антеннами, причем система определяет также, по крайней мере, направление или скорость или оба эти параметра движения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS) на основе относительного времени приема сигналов от антенн элементами СПЛ (UPS).
18. Элемент СПЛ (UPS) по п.14, отличающийся тем, что способен принимать и ретранслировать характерные сигналы от других элементов из множества элементов СПЛ (UPS).
19. Способ отслеживания перемещений в подповерхностной среде, включающий шаги:
a. установку совокупности элементов системы подземной локации СПЛ (UPS) в подповерхностной среде, причем каждый элемент СПЛ (UPS) содержит, по крайней мере, передатчик сигналов для передачи характерного сигнала ЭМИ, включающего идентификатор, позволяющий по характерному сигналу определить передавший его элемент СПЛ (UPS);
b. прием сигналов ЭМИ от совокупности элементов СПЛ (UPS) из первого положения в процессе обмена данными с элементами СПЛ (UPS) и передача устройству обработки данных информации о времени приема каждого сигнала ЭМИ из первого положения;
c. прием сигналов ЭМИ от совокупности элементов СПЛ (UPS), по меньшей мере, из второго положения в процессе обмена данными с элементами СПЛ (UPS) и передача устройству обработки данных информации о времени приема каждого сигнала ЭМИ из второго положения; и
d. обработку данных, в ходе которой определяют, по крайней мере, направление или скорость или оба эти параметра движения, по меньшей мере, одного перемещающегося элемента СПЛ (UPS).
20. Способ по п.19, отличающийся тем, что содержит перед шагом d. шаг приема сигналов ЭМИ от множества элементов СПЛ (UPS), по меньшей мере, из третьего положения в процессе обмена данными с элементами СПЛ (UPS) и шаг передачи устройству обработки данных информации о времени приема каждого сигнала ЭМИ из третьего положения.
21. Способ по п.19, отличающийся тем, что содержит перед шагом d. шаг приема элементами СПЛ (UPS) сигналов от антенн - источников сигнала в процессе обмена данными с элементами СПЛ (UPS) и шаг передачи данных о времени получения каждого сигнала антенн каждым элементом СПЛ (UPS).
22. Способ по п.21, отличающийся тем, что сигнал антенны представляет собой сигнал очень низкой частоты ОНЧ (VLF).
23. Способ по п.19, отличающийся тем, что сигналы ЭМИ от элементов СПЛ (UPS) представляют собой сигналы очень низкой частоты ОНЧ (VLF).
24. Способ по п.19, содержащий перед шагом d. дополнительный шаг, на котором, по меньшей мере, некоторые элементы СПЛ (UPS) передают данные другим элементам СПЛ (UPS) для их ретрансляции, по меньшей мере, одним из других элементов СПЛ (UPS) устройству обработки данных.
| US 6454023 В1, 24.09.2002 | |||
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| RU 96109874 A, 20.01.1998 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДПОВЕРХНОСТНЫХ СТРУКТУР И ЛОКАЛЬНЫХ ОБЪЕКТОВ В НИХ | 2002 |
|
RU2244944C2 |
| US 20050077085 A1, 14.04.2005 | |||
| US 6552548 B1, 22.04.2003 | |||
| WO 20011081724 A1, 01.11.2001. | |||

